
表面形状測定装置
【課題】ワークが比較的大きな重量を有する場合であっても、仮置きされたワークを測定用テーブル上の測定位置に精度良く設置可能とする。
【解決手段】 表面形状測定装置1が、測定時にワークWが載置される測定用テーブル2と、ワークが仮置きされる仮置き用テーブル4と、仮置き用テーブル上のワークを測定用テーブル上の所定位置まで搬送する搬送機構5とを備え、搬送機構は、ワークを支持する一対の支持アーム15と、ワークと係合することにより、当該ワークと支持アームとの水平方向の相対位置を定めるガイドパネル16とを有する構成とする。
【解決手段】 表面形状測定装置1が、測定時にワークWが載置される測定用テーブル2と、ワークが仮置きされる仮置き用テーブル4と、仮置き用テーブル上のワークを測定用テーブル上の所定位置まで搬送する搬送機構5とを備え、搬送機構は、ワークを支持する一対の支持アーム15と、ワークと係合することにより、当該ワークと支持アームとの水平方向の相対位置を定めるガイドパネル16とを有する構成とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、被測定物を測定位置まで搬送する搬送機構を備えた表面形状測定装置に関する。
【背景技術】
【0002】
従来、ポリッシングプレートやラッピングプレート等の表面形状(平坦度等)を測定する装置が普及しており、例えば、被測定物が載置されるテーブルと、このテーブル上で被測定物を回転させる際のガイドとなる一対のロールと、一軸型のスライダに対し、その移動方向と直交する方向に取り付けられた接触型の変位センサと、この変位センサの移動位置を検出する位置検出機構と、変位センサから得た被測定物の表面の形状情報信号および位置検出機構から得た位置信号を演算する演算処理部とを備えたものが知られている(特許文献1参照)。この表面形状測定装置によると、被測定物を所定角度ずつ回転させ、これにより測定位置を変更しながら変位センサを繰り返し走査することで、被測定物の表面形状を測定することが可能となる。
【0003】
上記のような表面形状測定装置では、オペレータはテーブル上の測定位置に被測定物を正確にセットする必要があるが、作業効率の向上やワークへの異物の付着の防止等の観点から、人手を介さずに搬送ロボット等の搬送装置(特許文献2,3参照)を使用することも考えられる。
【0004】
【特許文献1】特開平8−54204号公報
【特許文献2】特開平9−82776号公報
【特許文献3】特開2003−130809号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、上記特許文献2,3に記載された従来技術に開示された間接部を有するアームを備えた搬送ロボットは、シリコンウエハや液晶用ガラス等の比較的小型で軽量のワークの搬送には適するものの、比較的大型で大きな重量(例えば、100kg以上)を有するワークの場合には、アーム強度や搬送の安定性・迅速性等の観点から適用が難しいという課題があった。
【0006】
本発明は、このような従来技術の課題を鑑みて案出されたものであり、ワークが比較的大きな重量を有する場合であっても、仮置きされたワークを測定用テーブル上の測定位置に精度良く設置可能とした表面形状測定装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記課題を解決するためになされた第1の発明は、測定時に被測定物(W)が載置される測定用テーブル(2)と、前記被測定物が仮置きされる仮置き用テーブル(4)と、前記仮置き用テーブル上の前記被測定物を前記測定用テーブル上の所定位置まで搬送する搬送機構(5)とを備え、前記搬送機構は、前記被測定物を支持する一対の支持アーム(15)と、前記被測定物と係合することにより、当該被測定物と前記支持アームとの水平方向の相対位置を定めるガイド手段(16)とを有する構成とする。
【0008】
また、第2の発明として、前記ガイド手段は、前記各支持アームに対して着脱自在に設けられるとともに、大きさの異なる複数の前記被測定物にそれぞれ係合可能な係合部材を有する構成とすることができる。
【0009】
また、第3の発明として、前記係合部材は、複数の対をなす分割片(141〜144)からなり、 前記対をなす分割片の各々は、大きさの異なる複数の前記被測定物の側面にそれぞれ当接することにより、前記被測定物と前記支持アームとの水平方向の相対位置を定める構成とすることができる。
【0010】
また、第4の発明として、前記仮置き用テーブルは、前記被測定物を摺動自在に支持する摺動支持手段(25)を有する構成とすることができる。
【発明の効果】
【0011】
上記第1の発明によれば、被測定物が比較的大きな重量を有する場合であっても、仮置きされた被測定物を測定用テーブル上の測定位置に精度良く設置可能となる。また、上記第2の発明によれば、大きさの異なる複数の被測定物を測定用テーブル上の測定位置に精度良く設置することが可能となる。また、上記第3の発明によれば、簡易な構成により係合部材を実現することができるとともに、支持アームに対する着脱分割片の着脱により、被測定物の大きさの変更に容易に対応することができる。また、上記第4の発明によれば、被測定物と支持アームとの水平方向の相対位置を容易に定めることが可能となる。
【発明を実施するための最良の形態】
【0012】
以下、本発明の実施の形態について図面を参照しながら説明する。以下では、特に断り書きのない限り、方向を示す用語「上」,「下」は表面形状測定装置の上下方向に従い、「左」,「右」は、図2に示した表面形状測定装置の左右方向に従うものとする。また、「前」,「後」は、図2に示した表面形状測定装置の手前側および奥側に対応する。
【0013】
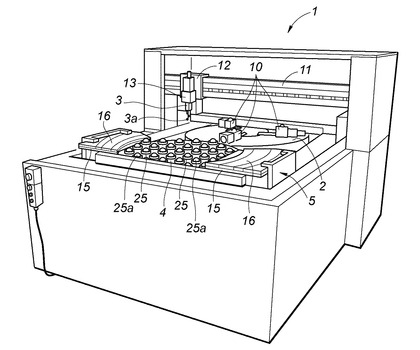
図1および図2はそれぞれ本発明の実施形態に係る表面形状測定装置の斜視図および要部平面図である。
【0014】
表面形状測定装置1は、ポリッシングプレートやラッピングプレート等のワーク(図示せず)を支持する回転自在の円盤状の測定用テーブル2と、この測定用テーブル2の上方において左右方向に直線移動するセンサ3と、ワークが仮置きされる仮置き用テーブル4と、この仮置き用テーブル4上に載置されたワークを測定用テーブル2上の所定位置まで搬送するワーク搬送機構5とを備える。
【0015】
測定用テーブル2の上面には、ワークの測定位置(高さ)を調節する3つの高さ調節装置10が周方向に等間隔で配置されている。センサ3は、その先端にワーク表面と接触するプローブ3aを有する接触式の変位センサであり、測定用テーブル2の上方に配置されたガイドバー11に直線移動可能に取り付けられたスライダ12上に設置されている。これらガイドバー11およびスライダ12は、図示しないリニアモータで駆動される周知のエアスライドを構成する。また、スライダ12には、センサ3(プローブ3a)の上下位置を変更する位置調節具13が設けられている。
【0016】
ワーク搬送機構5は、ワークを支持する左右一対の支持アーム15と、ワークの非測定部位の少なくとも一部(ここでは、ワーク側面)と係合することにより、ワークと支持アーム15との水平方向の相対位置を定める一対のガイドパネル16とを有する。両支持アーム15は、仮置き用テーブル4を挟み込むようにその左右に配置されている。また、後述するように、ワーク搬送機構5には、両支持アーム15の昇降動作および前後方向への移動動作を実現するための装置が設けられている。
【0017】
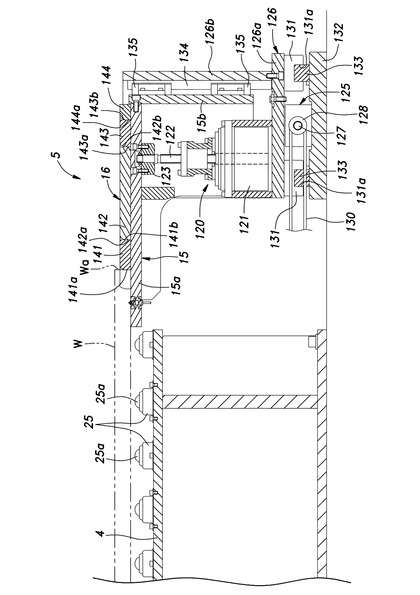
仮置き用テーブル4の上面には複数のフリーボールベアリング25が配置されている。詳細は図示しないが、フリーボールベアリング25は、半球状の凹部に複数の小径ボールを配した受容部材に樹脂製の大径ボール25aを回転自在に受容させた構成を有する。ワークを複数のフリーボールベアリング25により支持させることで、比較的大きな重量(例えば、300kg)のワークであっても、仮置き用テーブル4上で水平方向に容易に摺動させることが可能となる。従って、作業者は、仮置き用テーブル4上のワークを支持アーム15に支持させる際に、ワークと支持アーム15との水平方向の相対位置を容易に調整することができる。
【0018】
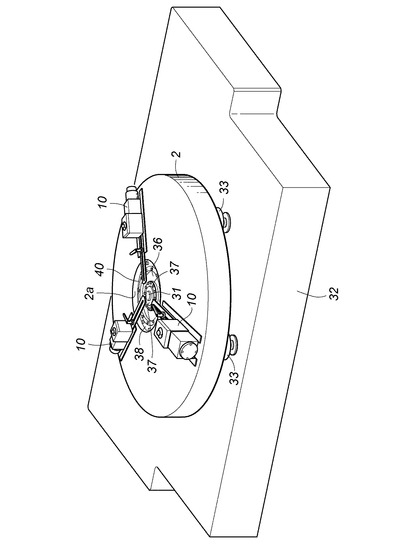
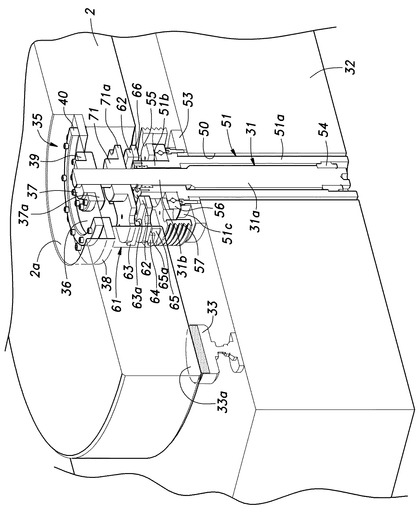
図3は図1の測定用テーブルを示す斜視図であり、図4は測定用テーブルの回転支持構造を示す断面図である。
【0019】
測定用テーブル2の回転支持構造は、測定用テーブル2の中心部から下方に延設された金属製の回転シャフト31と、回転シャフト31を回転自在に支持する支持ベース32とから主として構成される。
【0020】
支持ベース32上には、測定用テーブル2の軸方向に作用する荷重を受けるべく、回転シャフト31周囲に所定の間隔をおいて複数のエアパッド33が設けられている。エアパッド33は、図4に示すように、測定用テーブル2の下面に対向する上面33aに複数の吹出孔(図示せず)が設けられており、それら吹出孔から測定用テーブル2の下面に向けて加圧された空気を吐出することで、測定用テーブル2との間に薄い空気膜を形成し、測定用テーブル2を浮上させた状態で支持する。エアパッド33から吐出される空気は、図示しないコンプレッサからフィルタおよびレギュレータを介してチューブでエアパッド33に供給される。
【0021】
回転シャフト31は、その上端が、測定用テーブル2の中央に設けられた貫通孔2a内に挿入された状態で、板バネユニット35を介して測定用テーブル2に連結されている。板バネユニット35は、ドーナツ形の板バネ36と、回転シャフト31の上端部に取り付けられたハブ37と、測定用テーブル2の貫通孔2aに形成された段差部にボルト締結された環状の連結部材38とを有している。板バネ36は、その内周縁部が、ハブ37のフランジ部37aと環状の固定部材39との間に上下に挟持された状態でボルトにより固定される一方、その外周縁部が、連結部材38と環状の固定部材40との間に上下に挟持された状態でボルトにより固定されている。従って、板バネ36は、固定された内外の周縁部を除く領域の変形が可能である。この板バネ36の変形により、エアパッド33により測定用テーブル2が浮上(即ち、回転シャフト31に対して測定用テーブル2が上方に変位)した場合でも、回転シャフト31と測定用テーブル2との連結状態が適切に保持される。
【0022】
また、支持ベース32に設けられた支持孔50には、回転シャフト31が挿入されるシャフトハウジング51が取り付けられている。シャフトハウジング51は、略円筒形状を呈しており、支持孔50内に収容される拡径部51aと、支持孔50から上方に延出する縮径部51bと、拡径部51aとの境界に位置する縮径部51bの外周に設けられたフランジ部51cとを有する。
【0023】
拡径部51aおよび縮径部51bは、それぞれ回転シャフト31の拡径部31aおよび縮径部31bを囲繞するように形成されている。フランジ部51cは、支持孔50の開口縁にボルト締結された環状の固定部材53を介して、支持ベース32にボルト締結されている。また、シャフトハウジング51の拡径部51aおよび縮径部51bの内周壁に設けられた環状溝には、軸受54および軸受55がそれぞれ設置されており、これら軸受54,54は、回転シャフト31の径方向に作用する荷重を受ける。
【0024】
シャフトハウジング51のフランジ部51cの上側には、プーリベアリング56がボルト締結され、さらに、プーリベアリング56の外輪にはプーリ57がボルト締結されている。プーリ57には、図示しない駆動モータに接続された駆動ベルトが巻きかけられ、オルダム機構61を介して回転シャフト31に回転駆動力(駆動モータ出力)が伝達される。
【0025】
オルダム機構61は、プーリ57と回転シャフト31とを連結する。オルダム機構61では、前後方向に延びる左右一対の前後ガイドキー62が、上部スライダ63に設けられた一対のガイド溝63aに対し、その延在方向に摺動可能な状態で嵌合するとともに、左右方向(即ち、前後ガイドキー62と直交する方向)に延びる一対の左右ガイドキー64が、下部スライダ65に設けられた一対のガイド溝65aに対し、その延在方向に摺動可能な状態で嵌合する。
【0026】
前後ガイドキー62,左右ガイドキー64は、環状をなすセンタプレート66の上面および下面にそれぞれ固定されている。センタプレート66は、略円板上を呈し、その中央には回転シャフト31(またはシャフトハウジング51)が挿入される挿入孔を有している。上部スライダ63は、回転シャフト31に取り付けられたハブ71のフランジ部71aの下面にボルト締結される。また、下部スライダ65は、プーリ57の上面にボルト締結される。
【0027】
このように、測定用テーブル2を回転自在に支持する回転シャフト31が支持ベース32の支持孔50に挿入される構成としたことにより、簡易かつコンパクトな構成を維持しながら(回転シャフト31を支持ベース32から大きく突出させることなく)シャフト32の長さを増大させることが可能となり、その結果、測定用テーブル2の回転振れの精度を向上させることができる。また、プーリ57と回転シャフト31とをオルダム機構61を介して接続する構成としたため、シャフトハウジング51に回転自在に支持されるプーリ57と、回転シャフト31との軸心のずれを吸収することが可能となり、回転振れの精度をより一層向上させることができる。
【0028】
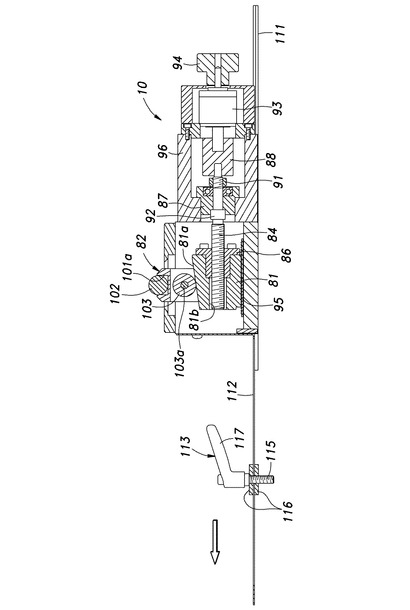
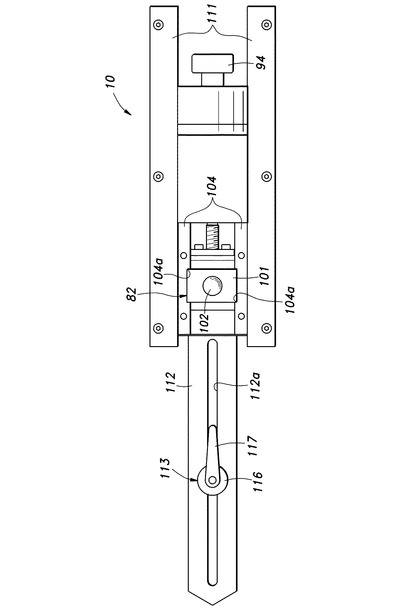
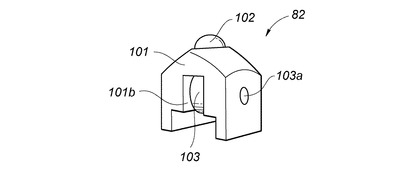
図5および図6はそれぞれ高さ調節装置の断面図および平面図であり、図7は高さ調節装置における昇降支持部材の斜視図である。図6は、ハウジングの上蓋を取り除いて昇降体82周辺を露出させた状態を示している。
【0029】
図5に示すように、高さ調節装置10は、装置前方(図中に矢印で示す測定用テーブル2の中心方向)に向けて下方に傾斜した傾斜面81aを有するテーパブロック81と、テーパブロック81上に配置され、その傾斜面81aに沿って昇降動作する昇降体82とを主として備える。
【0030】
テーパブロック81には、装置前後方向(測定用テーブル2の径方向)に貫通する貫通孔81bが設けられており、この貫通孔81bには、装置前後方向に延在するネジ軸84に螺合するナット86が嵌着されている。ネジ軸84は、玉軸受が収容された軸受ユニット87によって支持されており、装置後方(測定用テーブル2の反中心方向)側の端部がカップリング88に接続されている。ネジ軸84における軸受ユニット87の後方には軸受に予圧を与えるべく固定ナット91が取り付けられるととももに、ネジ軸84における軸受ユニット87の前方にはストッパ部92が設けられている。
【0031】
カップリング88は、ネジ軸84と減速機93の出力軸とを連結しており、減速機93の入力軸には、操作ノブ94が設けられている。また、テーパブロック81の下方には、テーパブロック81を装置前後方向に摺動可能に支持するリニアフラットローラ95が設けられている。昇降体82の上部と操作ノブ94とを除く上記各構成要素は、ハウジング96内に収容されている。
【0032】
図7にも示すように、昇降体82は、その本体101の上部に設けられた溝101a(図5参照)にセラミックス製の球状部材102が嵌装されている。球状部材102は、ワークの下面に略点接触(頂部の狭い領域が接触)することで、ワークを支持する。この球状部材102により、ワークの下面を適切に支持することが可能となり、ワークの損傷等を防止しつつその撓み等の影響を抑制することができる。
【0033】
また、本体101の下部に設けられた溝101bの上側に位置する縮幅部には、軸103aを中心に回転可能に設けられたローラ103が収容されている。溝101bの下側に位置する拡幅部には、テーパブロック81の上部が嵌装され、これにより、図5に示すように、ローラ103の周面が傾斜面81aと接触した状態となる。本体101は、図6に示すように、左右一対のサイドブロック104に設けられた溝104aに嵌装されており、この溝104a内を上下方向に摺動自在である一方、装置前後方向の移動が規制されている。
【0034】
測定用テーブル2上には、高さ調節装置10におけるハウジング96の左右の側縁に沿って、高さ調節装置10の装置前後方向の移動をガイドする一対のサイドガイドプレート111が設置されている。また、高さ調節装置10のハウジング96には、装置前方に向けてセンタガイドプレート112が延設されている。センタガイドプレート112は装置前後方向に延びる長孔112aを有する。
【0035】
また、測定用テーブル2上には、センタガイドプレート112の固定具113が設置されている。固定具113は、センタガイドプレート112の長孔112aに挿入された状態で測定用テーブル2に設けられたネジ孔(図示せず)に螺合するネジ軸115と、センタガイドプレート112の上下に配置された一対の円環状の固定リング116と、操作ハンドル117とを有している。高さ調節装置10は、ネジ軸115が長孔112aと係合可能な範囲で前後方向の位置調節が可能である。オペレータは、高さ調節装置10を所望の位置にセットした後、操作ハンドル117を操作してネジ軸115をネジ孔に締め込むことで、両固定リング116の間にセンタガイドプレート112を挟持固定することができる。
【0036】
上記構成の高さ調節装置10では、オペレータが手動で操作ノブ94を一方側に回転させることで、ネジ軸84が回転し、テーパブロック81が装置前方に移動する。これにより、テーパブロック81の傾斜面81aと昇降体82のローラ103との接触位置が装置後方に移動し、昇降体82が上昇する。このとき、例えば、センサ3を用いてワークの表面形状を仮測定することで、高さ調節の良否を判断することができる。
【0037】
また、操作ノブ94の回転は、減速機93によって減速されるため、昇降体82の上昇量の微調整が可能となり、ワークの高さを正確に設定することができる。また、昇降体82は、ローラ103を介して傾斜面81aと接触する構成であるため、摩擦による抵抗が小さくなり、操作ノブ94の回転駆動力(操作力)が小さくて済むという利点がある。この場合、操作ノブ94にモータ等の回転駆動力を発生する装置を接続し、手動によらずにネジ軸84を回転させてもよい。なお、昇降体82の下降は、操作ノブ94を他方側に回転させることで行われる。
【0038】
また、円板状のワークを測定対象とする場合、3つの球状部材102の径方向の位置は、それぞれワークの直径の63〜73%の範囲内(より好ましくは直径の68%の位置)に配置するとよい。これにより、高さ調節装置10に支持されるワークの自重による撓み量を最小とすることができ、測定精度を向上させることができる。
【0039】
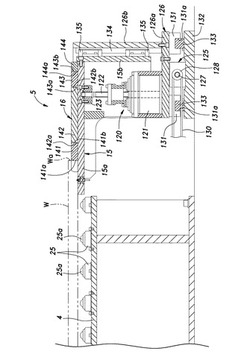
図8は図1のワーク搬送機構5の詳細を示す要部断面図である。
【0040】
ワーク搬送機構5における両支持アーム15は、ワークWが載置される水平部15aと、水平部15aの外端から下方に延設された鉛直部15bとを有する。水平部15aの上面には、ガイドパネル16が設置されるとともに、その上面におけるガイドパネル16の内側の領域でワークWの下面が支持される。また、水平部15aの下側には、支持アーム15の昇降を行う昇降装置120が設けられている。昇降装置121は、モータ121によって上下方向に伸縮駆動される伸縮シャフト122を有しており、伸縮シャフト122の先端に取り付けられた支持ブロック123が、水平部15aの下面にボルト締結されている。
【0041】
また、ワーク搬送機構5は、ボールネジ125によって支持アーム15の前後方向への直線移動を実現する移動台126を有している。移動台126の水平部126a上には、昇降装置120が設置されている。ボールネジ125は、前後方向に延びるネジ軸127(図2参照)と、移動台126の水平部126aの下側に取り付けられたボールねじ用ナット128とからなる。ネジ軸127は、図示しないモータの出力を伝達するベルト130により回転駆動される。また、移動台126の水平部126aの下面には、一対の前後スライダ131が設けられている。両前後スライダ131は、下面に設けられた溝131aがベースプレート132上で前後方向に延びる一対の前後ガイドレール133にそれぞれ摺動可能に嵌合している。この前後スライダ131および前後ガイドレール133と、ボールネジ125とによって、移動台126は、前後方向に円滑に移動することが可能である。
【0042】
また、移動台126の水平部126aの外端側から上方に延設された鉛直部126bには、鉛直方向に延びる上下ガイドレール134が設けられている。この上下ガイドレール134には、支持アーム15の鉛直部15bに設けられた上下スライダ135が上下方向に摺動可能に係合しており、これにより、支持アーム15の昇降動作が上下ガイドレール134にガイドされる。
【0043】
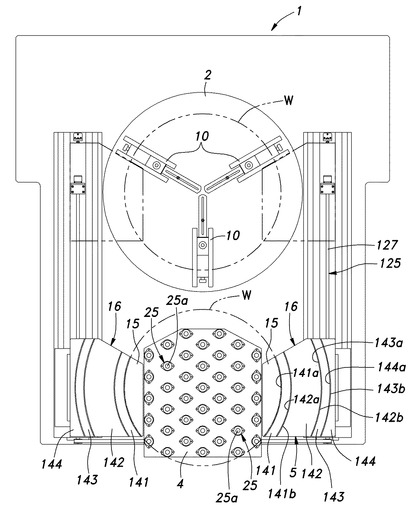
両ガイドパネル16は、図2にも示したように、複数(ここでは、4組)の対をなす樹脂製の分割片141〜144から構成されており、これら分割片141〜144は、それぞれ支持アーム15に対して選択的に着脱可能なようにボルト締結されている。本実施形態では、測定対象として円板状のワークを想定しており、分割片141の内側縁141aは、第1のサイズを有するワークWの外周面(平面視における円弧状の側面)Waに対応する円弧形状を有している。即ち、作業者は、ワークWを仮置き用テーブル4上に仮置きする際に、ワークWの外周面Waを左右の分割片141の内側縁141aに当接させることで、ワークWと支持アーム15との水平方向の相対位置を適切に定めることができる。
【0044】
また、分割片141と同様に、分割片142〜144の内側縁142a〜144aは、ワークWよりも大きい外径(第2〜第4のサイズ)を有する異なる複数のワークの外周面にそれぞれ対応する円弧形状を有している。従って、例えば、第3のサイズのワークを測定する場合、対応する分割片143よりも内側の分割片141,142を取り外した状態で、ワークが支持アーム15上に載置されることになる。なお、図2にも示すように、分割片141〜144の外側縁141b〜143bは隣接する分割片の内側縁にそれぞれ対応する形状を有しており、これにより、各分割片の設置作業時の位置合わせ等が容易となる。
【0045】
上記構成のワーク搬送機構5により、ワークが比較的大きな重量を有する場合であっても、仮置きされたワークを測定用テーブル2上の測定位置に精度良く設置可能となる。また、ガイドパネル16を設けることにより、ワークWと支持アーム15との水平方向の相対位置を適切に定めることで、大きさの異なる複数のワークを測定用テーブル2上の測定位置に精度良く設置することが可能となる。
【0046】
なお、分割片の形状や数量は、測定対象となるワークのサイズや形状に応じて種々の変更が可能である。本実施形態では、分割片の内周縁の全域がワークの外周面に沿って接触する構成としたが、少なくともワークWと支持アーム15との水平方向の相対位置を定めることが可能であればよく、例えば、分割片の内周縁における複数の異なる部位がワークの外周面に接触する構成でもよい。
【0047】
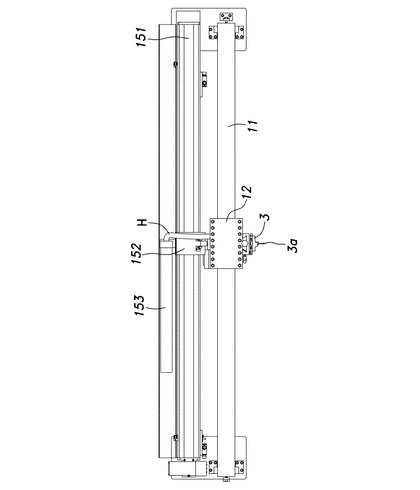
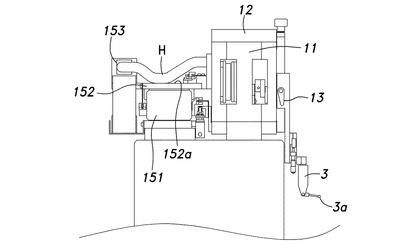
図9および図10は図1のセンサ3周辺を示す要部平面図および要部側面図ある。表面形状測定装置1におけるガイドバー11の後方には、サブガイドバー151およびサブスライダ152が設けられている。サブガイドバー151は、ガイドバー11と略平行に配置されている。サブスライダ152は、スライダ12と同期して左右方向に直線移動する。サブスライダ152の上面152aには、センサ3の通信ケーブルやスライダ12を駆動するリニアモータの電線等を含むハーネスHが固定されている。ハーネスHは、ケーブル保護管153に支持され、表面形状測定装置1の背面側に設置された図示しない電源および制御装置に接続される。
【0048】
上記構成のワーク搬送機構5では、オペレータによって仮置き用テーブル4上に載置されたワークWの位置決めがなされた後、昇降装置120を上昇動作させることにより、図8に示すように、支持アーム15を所定位置(ここでは、支持アーム15の前後方向への移動動作が可能な位置)まで上昇させる。その後、図示しないモータを作動させてネジ軸127を回転させることで、移動台126を測定用テーブル2方向に移動させる。これにより、支持アーム15は、図2に2点鎖線で示すように、測定用テーブル2上に移動し、昇降装置120を下降動作させることにより、ワークWが測定用テーブル2の測定位置にセットされる。円板状のワークの場合、その中心位置が測定用テーブル2の中心(軸心)と一致するようにセットされる。その後、上述のような高さ調節装置10による高さ調節が実行されて、測定準備が完了する。
【0049】
この場合、ワークWは、仮置き用テーブル4において、支持アーム15との位置決めがなされているため、ワーク搬送機構5に所定の動作を実行させるだけで、測定用テーブル2の測定位置にワークWを正確に設置できるという利点がある。
【0050】
ワークWが測定用テーブル2の測定位置にセットされた後の表面形状測定は、周知の表面形状装置の測定方法と同様に実行される。例えば、静止したワークWの表面にプローブ3aを接触させた状態で、スライダ12によりセンサ3をワークWの直径方向に直線移動させ、ワーク表面の所定ラインにおけるプローブ3aの変位量(即ち、表面形状)を検出する。このような変位量の検出を、測定用テーブル2を回転させてワークWの測定部位を適宜変更しながら実行することで、ワークWの表面全域にわたって変位量のデータを取得できる。
【0051】
本発明を特定の実施形態に基づいて詳細に説明したが、これらの実施形態はあくまでも例示であって本発明はこれらの実施形態によって限定されるものではない。例えば、本発明に係る表面形状測定装置は、比較的重量の大きいワークの測定に好適であるが、種々の形状およびサイズを有するワークの測定に用いることが可能である。また、ワークの種類によっては、上述の接触式のセンサの代わりに、周知の非接触式のセンサを用いて測定を行うことができる。
【図面の簡単な説明】
【0052】
【図1】実施形態に係る表面形状測定装置の斜視図
【図2】実施形態に係る表面形状測定装置の要部平面図
【図3】図1の測定用テーブルを示す斜視図
【図4】図1の測定用テーブルの回転支持構造を示す断面図
【図5】図1の高さ調節装置の断面図
【図6】図1の高さ調節装置の平面図
【図7】図5の高さ調節装置における昇降支持部材の斜視図
【図8】図1のワーク搬送機構の要部断面図
【図9】図1の表面形状測定装置のセンサ周辺を示す要部平面図
【図10】図1の表面形状測定装置のセンサ周辺を示す要部側面図
【符号の説明】
【0053】
1 表面形状測定装置
2 測定用テーブル
3 センサ
4 仮置き用テーブル
5 ワーク搬送機構
10 高さ測定装置
11 ガイドバー
12 スライダ
15 支持アーム
16 ガイドパネル
25 フリーボールベアリング
31 シャフト
32 支持ベース
33 エアパッド
35 板バネユニット
36 板バネ
50 支持孔
51 シャフトハウジング
53 固定部材
54 軸受
55 軸受
56 プーリベアリング
57 プーリ
61 オルダム機構
62 前後ガイドキー
63 上部スライダ
64 左右ガイドキー
65 下部スライダ
66 センタプレート
81 テーパブロック
81a 傾斜面
82 昇降体
84 ネジ軸
86 ナット
87 軸受ユニット
88 カップリング
93 減速機
94 操作ノブ
101 本体(昇降体)
102 球状部材
103 ローラ
111 サイドガイドプレート
112 センタガイドプレート
113 固定具
117 操作ハンドル
120 昇降装置
123 支持ブロック
125 ボールネジ
126 移動台
131 前後スライダ
132 ベースプレート
133 前後ガイドレール
134 上下ガイドレール
135 上下スライダ
141〜144 分割片
151 サブガイドバー
152 サブスライダ
H ハーネス
W ワーク
【技術分野】
【0001】
本発明は、被測定物を測定位置まで搬送する搬送機構を備えた表面形状測定装置に関する。
【背景技術】
【0002】
従来、ポリッシングプレートやラッピングプレート等の表面形状(平坦度等)を測定する装置が普及しており、例えば、被測定物が載置されるテーブルと、このテーブル上で被測定物を回転させる際のガイドとなる一対のロールと、一軸型のスライダに対し、その移動方向と直交する方向に取り付けられた接触型の変位センサと、この変位センサの移動位置を検出する位置検出機構と、変位センサから得た被測定物の表面の形状情報信号および位置検出機構から得た位置信号を演算する演算処理部とを備えたものが知られている(特許文献1参照)。この表面形状測定装置によると、被測定物を所定角度ずつ回転させ、これにより測定位置を変更しながら変位センサを繰り返し走査することで、被測定物の表面形状を測定することが可能となる。
【0003】
上記のような表面形状測定装置では、オペレータはテーブル上の測定位置に被測定物を正確にセットする必要があるが、作業効率の向上やワークへの異物の付着の防止等の観点から、人手を介さずに搬送ロボット等の搬送装置(特許文献2,3参照)を使用することも考えられる。
【0004】
【特許文献1】特開平8−54204号公報
【特許文献2】特開平9−82776号公報
【特許文献3】特開2003−130809号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、上記特許文献2,3に記載された従来技術に開示された間接部を有するアームを備えた搬送ロボットは、シリコンウエハや液晶用ガラス等の比較的小型で軽量のワークの搬送には適するものの、比較的大型で大きな重量(例えば、100kg以上)を有するワークの場合には、アーム強度や搬送の安定性・迅速性等の観点から適用が難しいという課題があった。
【0006】
本発明は、このような従来技術の課題を鑑みて案出されたものであり、ワークが比較的大きな重量を有する場合であっても、仮置きされたワークを測定用テーブル上の測定位置に精度良く設置可能とした表面形状測定装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記課題を解決するためになされた第1の発明は、測定時に被測定物(W)が載置される測定用テーブル(2)と、前記被測定物が仮置きされる仮置き用テーブル(4)と、前記仮置き用テーブル上の前記被測定物を前記測定用テーブル上の所定位置まで搬送する搬送機構(5)とを備え、前記搬送機構は、前記被測定物を支持する一対の支持アーム(15)と、前記被測定物と係合することにより、当該被測定物と前記支持アームとの水平方向の相対位置を定めるガイド手段(16)とを有する構成とする。
【0008】
また、第2の発明として、前記ガイド手段は、前記各支持アームに対して着脱自在に設けられるとともに、大きさの異なる複数の前記被測定物にそれぞれ係合可能な係合部材を有する構成とすることができる。
【0009】
また、第3の発明として、前記係合部材は、複数の対をなす分割片(141〜144)からなり、 前記対をなす分割片の各々は、大きさの異なる複数の前記被測定物の側面にそれぞれ当接することにより、前記被測定物と前記支持アームとの水平方向の相対位置を定める構成とすることができる。
【0010】
また、第4の発明として、前記仮置き用テーブルは、前記被測定物を摺動自在に支持する摺動支持手段(25)を有する構成とすることができる。
【発明の効果】
【0011】
上記第1の発明によれば、被測定物が比較的大きな重量を有する場合であっても、仮置きされた被測定物を測定用テーブル上の測定位置に精度良く設置可能となる。また、上記第2の発明によれば、大きさの異なる複数の被測定物を測定用テーブル上の測定位置に精度良く設置することが可能となる。また、上記第3の発明によれば、簡易な構成により係合部材を実現することができるとともに、支持アームに対する着脱分割片の着脱により、被測定物の大きさの変更に容易に対応することができる。また、上記第4の発明によれば、被測定物と支持アームとの水平方向の相対位置を容易に定めることが可能となる。
【発明を実施するための最良の形態】
【0012】
以下、本発明の実施の形態について図面を参照しながら説明する。以下では、特に断り書きのない限り、方向を示す用語「上」,「下」は表面形状測定装置の上下方向に従い、「左」,「右」は、図2に示した表面形状測定装置の左右方向に従うものとする。また、「前」,「後」は、図2に示した表面形状測定装置の手前側および奥側に対応する。
【0013】
図1および図2はそれぞれ本発明の実施形態に係る表面形状測定装置の斜視図および要部平面図である。
【0014】
表面形状測定装置1は、ポリッシングプレートやラッピングプレート等のワーク(図示せず)を支持する回転自在の円盤状の測定用テーブル2と、この測定用テーブル2の上方において左右方向に直線移動するセンサ3と、ワークが仮置きされる仮置き用テーブル4と、この仮置き用テーブル4上に載置されたワークを測定用テーブル2上の所定位置まで搬送するワーク搬送機構5とを備える。
【0015】
測定用テーブル2の上面には、ワークの測定位置(高さ)を調節する3つの高さ調節装置10が周方向に等間隔で配置されている。センサ3は、その先端にワーク表面と接触するプローブ3aを有する接触式の変位センサであり、測定用テーブル2の上方に配置されたガイドバー11に直線移動可能に取り付けられたスライダ12上に設置されている。これらガイドバー11およびスライダ12は、図示しないリニアモータで駆動される周知のエアスライドを構成する。また、スライダ12には、センサ3(プローブ3a)の上下位置を変更する位置調節具13が設けられている。
【0016】
ワーク搬送機構5は、ワークを支持する左右一対の支持アーム15と、ワークの非測定部位の少なくとも一部(ここでは、ワーク側面)と係合することにより、ワークと支持アーム15との水平方向の相対位置を定める一対のガイドパネル16とを有する。両支持アーム15は、仮置き用テーブル4を挟み込むようにその左右に配置されている。また、後述するように、ワーク搬送機構5には、両支持アーム15の昇降動作および前後方向への移動動作を実現するための装置が設けられている。
【0017】
仮置き用テーブル4の上面には複数のフリーボールベアリング25が配置されている。詳細は図示しないが、フリーボールベアリング25は、半球状の凹部に複数の小径ボールを配した受容部材に樹脂製の大径ボール25aを回転自在に受容させた構成を有する。ワークを複数のフリーボールベアリング25により支持させることで、比較的大きな重量(例えば、300kg)のワークであっても、仮置き用テーブル4上で水平方向に容易に摺動させることが可能となる。従って、作業者は、仮置き用テーブル4上のワークを支持アーム15に支持させる際に、ワークと支持アーム15との水平方向の相対位置を容易に調整することができる。
【0018】
図3は図1の測定用テーブルを示す斜視図であり、図4は測定用テーブルの回転支持構造を示す断面図である。
【0019】
測定用テーブル2の回転支持構造は、測定用テーブル2の中心部から下方に延設された金属製の回転シャフト31と、回転シャフト31を回転自在に支持する支持ベース32とから主として構成される。
【0020】
支持ベース32上には、測定用テーブル2の軸方向に作用する荷重を受けるべく、回転シャフト31周囲に所定の間隔をおいて複数のエアパッド33が設けられている。エアパッド33は、図4に示すように、測定用テーブル2の下面に対向する上面33aに複数の吹出孔(図示せず)が設けられており、それら吹出孔から測定用テーブル2の下面に向けて加圧された空気を吐出することで、測定用テーブル2との間に薄い空気膜を形成し、測定用テーブル2を浮上させた状態で支持する。エアパッド33から吐出される空気は、図示しないコンプレッサからフィルタおよびレギュレータを介してチューブでエアパッド33に供給される。
【0021】
回転シャフト31は、その上端が、測定用テーブル2の中央に設けられた貫通孔2a内に挿入された状態で、板バネユニット35を介して測定用テーブル2に連結されている。板バネユニット35は、ドーナツ形の板バネ36と、回転シャフト31の上端部に取り付けられたハブ37と、測定用テーブル2の貫通孔2aに形成された段差部にボルト締結された環状の連結部材38とを有している。板バネ36は、その内周縁部が、ハブ37のフランジ部37aと環状の固定部材39との間に上下に挟持された状態でボルトにより固定される一方、その外周縁部が、連結部材38と環状の固定部材40との間に上下に挟持された状態でボルトにより固定されている。従って、板バネ36は、固定された内外の周縁部を除く領域の変形が可能である。この板バネ36の変形により、エアパッド33により測定用テーブル2が浮上(即ち、回転シャフト31に対して測定用テーブル2が上方に変位)した場合でも、回転シャフト31と測定用テーブル2との連結状態が適切に保持される。
【0022】
また、支持ベース32に設けられた支持孔50には、回転シャフト31が挿入されるシャフトハウジング51が取り付けられている。シャフトハウジング51は、略円筒形状を呈しており、支持孔50内に収容される拡径部51aと、支持孔50から上方に延出する縮径部51bと、拡径部51aとの境界に位置する縮径部51bの外周に設けられたフランジ部51cとを有する。
【0023】
拡径部51aおよび縮径部51bは、それぞれ回転シャフト31の拡径部31aおよび縮径部31bを囲繞するように形成されている。フランジ部51cは、支持孔50の開口縁にボルト締結された環状の固定部材53を介して、支持ベース32にボルト締結されている。また、シャフトハウジング51の拡径部51aおよび縮径部51bの内周壁に設けられた環状溝には、軸受54および軸受55がそれぞれ設置されており、これら軸受54,54は、回転シャフト31の径方向に作用する荷重を受ける。
【0024】
シャフトハウジング51のフランジ部51cの上側には、プーリベアリング56がボルト締結され、さらに、プーリベアリング56の外輪にはプーリ57がボルト締結されている。プーリ57には、図示しない駆動モータに接続された駆動ベルトが巻きかけられ、オルダム機構61を介して回転シャフト31に回転駆動力(駆動モータ出力)が伝達される。
【0025】
オルダム機構61は、プーリ57と回転シャフト31とを連結する。オルダム機構61では、前後方向に延びる左右一対の前後ガイドキー62が、上部スライダ63に設けられた一対のガイド溝63aに対し、その延在方向に摺動可能な状態で嵌合するとともに、左右方向(即ち、前後ガイドキー62と直交する方向)に延びる一対の左右ガイドキー64が、下部スライダ65に設けられた一対のガイド溝65aに対し、その延在方向に摺動可能な状態で嵌合する。
【0026】
前後ガイドキー62,左右ガイドキー64は、環状をなすセンタプレート66の上面および下面にそれぞれ固定されている。センタプレート66は、略円板上を呈し、その中央には回転シャフト31(またはシャフトハウジング51)が挿入される挿入孔を有している。上部スライダ63は、回転シャフト31に取り付けられたハブ71のフランジ部71aの下面にボルト締結される。また、下部スライダ65は、プーリ57の上面にボルト締結される。
【0027】
このように、測定用テーブル2を回転自在に支持する回転シャフト31が支持ベース32の支持孔50に挿入される構成としたことにより、簡易かつコンパクトな構成を維持しながら(回転シャフト31を支持ベース32から大きく突出させることなく)シャフト32の長さを増大させることが可能となり、その結果、測定用テーブル2の回転振れの精度を向上させることができる。また、プーリ57と回転シャフト31とをオルダム機構61を介して接続する構成としたため、シャフトハウジング51に回転自在に支持されるプーリ57と、回転シャフト31との軸心のずれを吸収することが可能となり、回転振れの精度をより一層向上させることができる。
【0028】
図5および図6はそれぞれ高さ調節装置の断面図および平面図であり、図7は高さ調節装置における昇降支持部材の斜視図である。図6は、ハウジングの上蓋を取り除いて昇降体82周辺を露出させた状態を示している。
【0029】
図5に示すように、高さ調節装置10は、装置前方(図中に矢印で示す測定用テーブル2の中心方向)に向けて下方に傾斜した傾斜面81aを有するテーパブロック81と、テーパブロック81上に配置され、その傾斜面81aに沿って昇降動作する昇降体82とを主として備える。
【0030】
テーパブロック81には、装置前後方向(測定用テーブル2の径方向)に貫通する貫通孔81bが設けられており、この貫通孔81bには、装置前後方向に延在するネジ軸84に螺合するナット86が嵌着されている。ネジ軸84は、玉軸受が収容された軸受ユニット87によって支持されており、装置後方(測定用テーブル2の反中心方向)側の端部がカップリング88に接続されている。ネジ軸84における軸受ユニット87の後方には軸受に予圧を与えるべく固定ナット91が取り付けられるととももに、ネジ軸84における軸受ユニット87の前方にはストッパ部92が設けられている。
【0031】
カップリング88は、ネジ軸84と減速機93の出力軸とを連結しており、減速機93の入力軸には、操作ノブ94が設けられている。また、テーパブロック81の下方には、テーパブロック81を装置前後方向に摺動可能に支持するリニアフラットローラ95が設けられている。昇降体82の上部と操作ノブ94とを除く上記各構成要素は、ハウジング96内に収容されている。
【0032】
図7にも示すように、昇降体82は、その本体101の上部に設けられた溝101a(図5参照)にセラミックス製の球状部材102が嵌装されている。球状部材102は、ワークの下面に略点接触(頂部の狭い領域が接触)することで、ワークを支持する。この球状部材102により、ワークの下面を適切に支持することが可能となり、ワークの損傷等を防止しつつその撓み等の影響を抑制することができる。
【0033】
また、本体101の下部に設けられた溝101bの上側に位置する縮幅部には、軸103aを中心に回転可能に設けられたローラ103が収容されている。溝101bの下側に位置する拡幅部には、テーパブロック81の上部が嵌装され、これにより、図5に示すように、ローラ103の周面が傾斜面81aと接触した状態となる。本体101は、図6に示すように、左右一対のサイドブロック104に設けられた溝104aに嵌装されており、この溝104a内を上下方向に摺動自在である一方、装置前後方向の移動が規制されている。
【0034】
測定用テーブル2上には、高さ調節装置10におけるハウジング96の左右の側縁に沿って、高さ調節装置10の装置前後方向の移動をガイドする一対のサイドガイドプレート111が設置されている。また、高さ調節装置10のハウジング96には、装置前方に向けてセンタガイドプレート112が延設されている。センタガイドプレート112は装置前後方向に延びる長孔112aを有する。
【0035】
また、測定用テーブル2上には、センタガイドプレート112の固定具113が設置されている。固定具113は、センタガイドプレート112の長孔112aに挿入された状態で測定用テーブル2に設けられたネジ孔(図示せず)に螺合するネジ軸115と、センタガイドプレート112の上下に配置された一対の円環状の固定リング116と、操作ハンドル117とを有している。高さ調節装置10は、ネジ軸115が長孔112aと係合可能な範囲で前後方向の位置調節が可能である。オペレータは、高さ調節装置10を所望の位置にセットした後、操作ハンドル117を操作してネジ軸115をネジ孔に締め込むことで、両固定リング116の間にセンタガイドプレート112を挟持固定することができる。
【0036】
上記構成の高さ調節装置10では、オペレータが手動で操作ノブ94を一方側に回転させることで、ネジ軸84が回転し、テーパブロック81が装置前方に移動する。これにより、テーパブロック81の傾斜面81aと昇降体82のローラ103との接触位置が装置後方に移動し、昇降体82が上昇する。このとき、例えば、センサ3を用いてワークの表面形状を仮測定することで、高さ調節の良否を判断することができる。
【0037】
また、操作ノブ94の回転は、減速機93によって減速されるため、昇降体82の上昇量の微調整が可能となり、ワークの高さを正確に設定することができる。また、昇降体82は、ローラ103を介して傾斜面81aと接触する構成であるため、摩擦による抵抗が小さくなり、操作ノブ94の回転駆動力(操作力)が小さくて済むという利点がある。この場合、操作ノブ94にモータ等の回転駆動力を発生する装置を接続し、手動によらずにネジ軸84を回転させてもよい。なお、昇降体82の下降は、操作ノブ94を他方側に回転させることで行われる。
【0038】
また、円板状のワークを測定対象とする場合、3つの球状部材102の径方向の位置は、それぞれワークの直径の63〜73%の範囲内(より好ましくは直径の68%の位置)に配置するとよい。これにより、高さ調節装置10に支持されるワークの自重による撓み量を最小とすることができ、測定精度を向上させることができる。
【0039】
図8は図1のワーク搬送機構5の詳細を示す要部断面図である。
【0040】
ワーク搬送機構5における両支持アーム15は、ワークWが載置される水平部15aと、水平部15aの外端から下方に延設された鉛直部15bとを有する。水平部15aの上面には、ガイドパネル16が設置されるとともに、その上面におけるガイドパネル16の内側の領域でワークWの下面が支持される。また、水平部15aの下側には、支持アーム15の昇降を行う昇降装置120が設けられている。昇降装置121は、モータ121によって上下方向に伸縮駆動される伸縮シャフト122を有しており、伸縮シャフト122の先端に取り付けられた支持ブロック123が、水平部15aの下面にボルト締結されている。
【0041】
また、ワーク搬送機構5は、ボールネジ125によって支持アーム15の前後方向への直線移動を実現する移動台126を有している。移動台126の水平部126a上には、昇降装置120が設置されている。ボールネジ125は、前後方向に延びるネジ軸127(図2参照)と、移動台126の水平部126aの下側に取り付けられたボールねじ用ナット128とからなる。ネジ軸127は、図示しないモータの出力を伝達するベルト130により回転駆動される。また、移動台126の水平部126aの下面には、一対の前後スライダ131が設けられている。両前後スライダ131は、下面に設けられた溝131aがベースプレート132上で前後方向に延びる一対の前後ガイドレール133にそれぞれ摺動可能に嵌合している。この前後スライダ131および前後ガイドレール133と、ボールネジ125とによって、移動台126は、前後方向に円滑に移動することが可能である。
【0042】
また、移動台126の水平部126aの外端側から上方に延設された鉛直部126bには、鉛直方向に延びる上下ガイドレール134が設けられている。この上下ガイドレール134には、支持アーム15の鉛直部15bに設けられた上下スライダ135が上下方向に摺動可能に係合しており、これにより、支持アーム15の昇降動作が上下ガイドレール134にガイドされる。
【0043】
両ガイドパネル16は、図2にも示したように、複数(ここでは、4組)の対をなす樹脂製の分割片141〜144から構成されており、これら分割片141〜144は、それぞれ支持アーム15に対して選択的に着脱可能なようにボルト締結されている。本実施形態では、測定対象として円板状のワークを想定しており、分割片141の内側縁141aは、第1のサイズを有するワークWの外周面(平面視における円弧状の側面)Waに対応する円弧形状を有している。即ち、作業者は、ワークWを仮置き用テーブル4上に仮置きする際に、ワークWの外周面Waを左右の分割片141の内側縁141aに当接させることで、ワークWと支持アーム15との水平方向の相対位置を適切に定めることができる。
【0044】
また、分割片141と同様に、分割片142〜144の内側縁142a〜144aは、ワークWよりも大きい外径(第2〜第4のサイズ)を有する異なる複数のワークの外周面にそれぞれ対応する円弧形状を有している。従って、例えば、第3のサイズのワークを測定する場合、対応する分割片143よりも内側の分割片141,142を取り外した状態で、ワークが支持アーム15上に載置されることになる。なお、図2にも示すように、分割片141〜144の外側縁141b〜143bは隣接する分割片の内側縁にそれぞれ対応する形状を有しており、これにより、各分割片の設置作業時の位置合わせ等が容易となる。
【0045】
上記構成のワーク搬送機構5により、ワークが比較的大きな重量を有する場合であっても、仮置きされたワークを測定用テーブル2上の測定位置に精度良く設置可能となる。また、ガイドパネル16を設けることにより、ワークWと支持アーム15との水平方向の相対位置を適切に定めることで、大きさの異なる複数のワークを測定用テーブル2上の測定位置に精度良く設置することが可能となる。
【0046】
なお、分割片の形状や数量は、測定対象となるワークのサイズや形状に応じて種々の変更が可能である。本実施形態では、分割片の内周縁の全域がワークの外周面に沿って接触する構成としたが、少なくともワークWと支持アーム15との水平方向の相対位置を定めることが可能であればよく、例えば、分割片の内周縁における複数の異なる部位がワークの外周面に接触する構成でもよい。
【0047】
図9および図10は図1のセンサ3周辺を示す要部平面図および要部側面図ある。表面形状測定装置1におけるガイドバー11の後方には、サブガイドバー151およびサブスライダ152が設けられている。サブガイドバー151は、ガイドバー11と略平行に配置されている。サブスライダ152は、スライダ12と同期して左右方向に直線移動する。サブスライダ152の上面152aには、センサ3の通信ケーブルやスライダ12を駆動するリニアモータの電線等を含むハーネスHが固定されている。ハーネスHは、ケーブル保護管153に支持され、表面形状測定装置1の背面側に設置された図示しない電源および制御装置に接続される。
【0048】
上記構成のワーク搬送機構5では、オペレータによって仮置き用テーブル4上に載置されたワークWの位置決めがなされた後、昇降装置120を上昇動作させることにより、図8に示すように、支持アーム15を所定位置(ここでは、支持アーム15の前後方向への移動動作が可能な位置)まで上昇させる。その後、図示しないモータを作動させてネジ軸127を回転させることで、移動台126を測定用テーブル2方向に移動させる。これにより、支持アーム15は、図2に2点鎖線で示すように、測定用テーブル2上に移動し、昇降装置120を下降動作させることにより、ワークWが測定用テーブル2の測定位置にセットされる。円板状のワークの場合、その中心位置が測定用テーブル2の中心(軸心)と一致するようにセットされる。その後、上述のような高さ調節装置10による高さ調節が実行されて、測定準備が完了する。
【0049】
この場合、ワークWは、仮置き用テーブル4において、支持アーム15との位置決めがなされているため、ワーク搬送機構5に所定の動作を実行させるだけで、測定用テーブル2の測定位置にワークWを正確に設置できるという利点がある。
【0050】
ワークWが測定用テーブル2の測定位置にセットされた後の表面形状測定は、周知の表面形状装置の測定方法と同様に実行される。例えば、静止したワークWの表面にプローブ3aを接触させた状態で、スライダ12によりセンサ3をワークWの直径方向に直線移動させ、ワーク表面の所定ラインにおけるプローブ3aの変位量(即ち、表面形状)を検出する。このような変位量の検出を、測定用テーブル2を回転させてワークWの測定部位を適宜変更しながら実行することで、ワークWの表面全域にわたって変位量のデータを取得できる。
【0051】
本発明を特定の実施形態に基づいて詳細に説明したが、これらの実施形態はあくまでも例示であって本発明はこれらの実施形態によって限定されるものではない。例えば、本発明に係る表面形状測定装置は、比較的重量の大きいワークの測定に好適であるが、種々の形状およびサイズを有するワークの測定に用いることが可能である。また、ワークの種類によっては、上述の接触式のセンサの代わりに、周知の非接触式のセンサを用いて測定を行うことができる。
【図面の簡単な説明】
【0052】
【図1】実施形態に係る表面形状測定装置の斜視図
【図2】実施形態に係る表面形状測定装置の要部平面図
【図3】図1の測定用テーブルを示す斜視図
【図4】図1の測定用テーブルの回転支持構造を示す断面図
【図5】図1の高さ調節装置の断面図
【図6】図1の高さ調節装置の平面図
【図7】図5の高さ調節装置における昇降支持部材の斜視図
【図8】図1のワーク搬送機構の要部断面図
【図9】図1の表面形状測定装置のセンサ周辺を示す要部平面図
【図10】図1の表面形状測定装置のセンサ周辺を示す要部側面図
【符号の説明】
【0053】
1 表面形状測定装置
2 測定用テーブル
3 センサ
4 仮置き用テーブル
5 ワーク搬送機構
10 高さ測定装置
11 ガイドバー
12 スライダ
15 支持アーム
16 ガイドパネル
25 フリーボールベアリング
31 シャフト
32 支持ベース
33 エアパッド
35 板バネユニット
36 板バネ
50 支持孔
51 シャフトハウジング
53 固定部材
54 軸受
55 軸受
56 プーリベアリング
57 プーリ
61 オルダム機構
62 前後ガイドキー
63 上部スライダ
64 左右ガイドキー
65 下部スライダ
66 センタプレート
81 テーパブロック
81a 傾斜面
82 昇降体
84 ネジ軸
86 ナット
87 軸受ユニット
88 カップリング
93 減速機
94 操作ノブ
101 本体(昇降体)
102 球状部材
103 ローラ
111 サイドガイドプレート
112 センタガイドプレート
113 固定具
117 操作ハンドル
120 昇降装置
123 支持ブロック
125 ボールネジ
126 移動台
131 前後スライダ
132 ベースプレート
133 前後ガイドレール
134 上下ガイドレール
135 上下スライダ
141〜144 分割片
151 サブガイドバー
152 サブスライダ
H ハーネス
W ワーク
【特許請求の範囲】
【請求項1】
測定時に被測定物が載置される測定用テーブルと、
前記被測定物が仮置きされる仮置き用テーブルと、
前記仮置き用テーブル上の前記被測定物を前記測定用テーブル上の所定位置まで搬送する搬送機構と
を備え、
前記搬送機構は、
前記被測定物を支持する一対の支持アームと、
前記被測定物と係合することにより、当該被測定物と前記支持アームとの水平方向の相対位置を定めるガイド手段と
を有することを特徴とする表面形状測定装置。
【請求項2】
前記ガイド手段は、前記各支持アームに対して着脱自在に設けられるとともに、大きさの異なる複数の前記被測定物にそれぞれ係合可能な係合部材を有することを特徴とする、請求項1に記載の表面形状測定装置。
【請求項3】
前記係合部材は、複数の対をなす分割片からなり、
前記対をなす分割片の各々は、大きさの異なる複数の前記被測定物の側面にそれぞれ当接することにより、前記被測定物と前記支持アームとの水平方向の相対位置を定めることを特徴とする、請求項2に記載の表面形状測定装置。
【請求項4】
前記仮置き用テーブルは、前記被測定物を摺動自在に支持する摺動支持手段を有することを特徴とする、請求項1から請求項3に記載の表面形状測定装置。
【請求項1】
測定時に被測定物が載置される測定用テーブルと、
前記被測定物が仮置きされる仮置き用テーブルと、
前記仮置き用テーブル上の前記被測定物を前記測定用テーブル上の所定位置まで搬送する搬送機構と
を備え、
前記搬送機構は、
前記被測定物を支持する一対の支持アームと、
前記被測定物と係合することにより、当該被測定物と前記支持アームとの水平方向の相対位置を定めるガイド手段と
を有することを特徴とする表面形状測定装置。
【請求項2】
前記ガイド手段は、前記各支持アームに対して着脱自在に設けられるとともに、大きさの異なる複数の前記被測定物にそれぞれ係合可能な係合部材を有することを特徴とする、請求項1に記載の表面形状測定装置。
【請求項3】
前記係合部材は、複数の対をなす分割片からなり、
前記対をなす分割片の各々は、大きさの異なる複数の前記被測定物の側面にそれぞれ当接することにより、前記被測定物と前記支持アームとの水平方向の相対位置を定めることを特徴とする、請求項2に記載の表面形状測定装置。
【請求項4】
前記仮置き用テーブルは、前記被測定物を摺動自在に支持する摺動支持手段を有することを特徴とする、請求項1から請求項3に記載の表面形状測定装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2010−133848(P2010−133848A)
【公開日】平成22年6月17日(2010.6.17)
【国際特許分類】
【出願番号】特願2008−310869(P2008−310869)
【出願日】平成20年12月5日(2008.12.5)
【出願人】(000170853)黒田精工株式会社 (81)
【Fターム(参考)】
【公開日】平成22年6月17日(2010.6.17)
【国際特許分類】
【出願日】平成20年12月5日(2008.12.5)
【出願人】(000170853)黒田精工株式会社 (81)
【Fターム(参考)】
[ Back to top ]