
表面検査装置、表面検査方法、および露光システム
【課題】露光時の走査方向の違いによって生じるスキャン精度の差異を求めることが可能
な表面検査装置を提供する。
【解決手段】露光によって作製されたパターンを有するウェハを照明光で照明する照明系
20と、パターンで反射した照明光を検出する受光系30および撮像装置35と、撮像装
置35により撮像されたウェハの回折画像からパターンの線幅を求め、走査方向によるパ
ターンの線幅の差を求める検査部42とを備えている。
な表面検査装置を提供する。
【解決手段】露光によって作製されたパターンを有するウェハを照明光で照明する照明系
20と、パターンで反射した照明光を検出する受光系30および撮像装置35と、撮像装
置35により撮像されたウェハの回折画像からパターンの線幅を求め、走査方向によるパ
ターンの線幅の差を求める検査部42とを備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、露光装置により露光された基板の表面を検査する表面検査装置および表面検
査方法に関する。また、このような表面検査装置および露光装置を備えた露光システムに
関する。
【背景技術】
【0002】
ステップ・アンド・スキャン方式の露光装置は、マスクパターンおよび投影レンズを介
してスリット状の光を照射しながら、レチクルステージ(すなわち、マスクパターンが形
成されたマスク基板)を相対移動させて1ショット分だけ走査(=スキャン)することに
より、半導体ウェハに対して1ショット分の露光を行うようになっている。このようにす
れば、スリット(光)の長辺とレチクルステージの相対スキャン距離で露光ショットの大
きさが決まるため、露光ショットを大きくすることができる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−304054号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
このような露光装置では、作業時間を短縮する等の理由により、露光ショットによって
走査方向を逆にすることがある。しかしながら、一方の走査方向とこれとは逆の他方の走
査方向とでスキャン精度が異なるために、走査方向の異なる露光ショットでパターン形状
が変化する場合があり、このような走査方向の違いによって生じるスキャン精度の差異を
求めるための方策が望まれていた。
【0005】
本発明は、このような問題に鑑みてなされたものであり、露光時の走査方向の違いによ
って生じるスキャン精度の差異を求めることが可能な表面検査装置、表面検査方法、およ
び露光システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
このような目的達成のため、本発明に係る表面検査装置は、露光によって作製されたパ
ターンを有する基板を照明光で照明する照明部と、前記パターンで反射した照明光を検出
する検出部と、前記検出の結果から前記パターンが作製された際の露光量に関する情報を
演算する演算部と、前記露光量に関する情報のバラツキを求める評価部とを備えている。
【0007】
また、本発明に係る露光システムは、基板の表面に所定のパターンを走査露光する露光
装置と、走査露光されて表面に前記パターンが形成された基板の表面検査を行う表面検査
装置とを備え、前記表面検査装置は、本発明に係る表面検査装置であって、前記評価部に
より求められた情報を前記露光装置へ出力し、前記露光装置は、前記表面検査装置から入
力された前記評価部により求められた情報に応じて、前記露光装置の設定を補正するよう
になっている。
【0008】
また、本発明に係る表面検査方法は、露光によって作製されたパターンを有する基板を
照明光で照明し、前記パターンで反射した照明光を検出し、前記検出の結果から前記パタ
ーンが作製された際の露光量に関する情報を演算し、前記露光量に関する情報のバラツキ
を求めるようになっている。
【発明の効果】
【0009】
本発明によれば、露光時の走査方向の違いによって生じるスキャン精度の差異を求める
ことができる。
【図面の簡単な説明】
【0010】
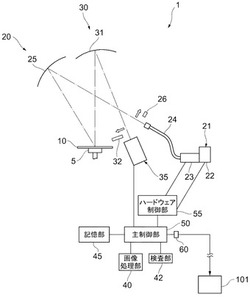
【図1】表面検査装置の全体構成を示す図である。
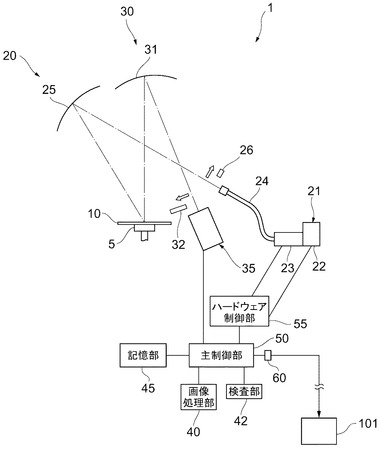
【図2】表面検査装置の光路上に偏光フィルタが挿入された状態を示す図である。
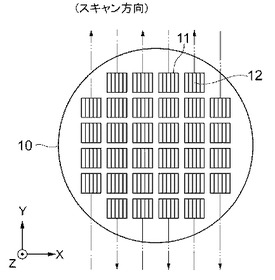
【図3】半導体ウェハの表面の外観図である。
【図4】繰り返しパターンの凹凸構造を説明する斜視図である。
【図5】直線偏光の入射面と繰り返しパターンの繰り返し方向との傾き状態を説明する図である。
【図6】正方向で走査露光されるパターンの線幅と逆方向で走査露光されるパターンの線幅との差を求める方法を示すフローチャートである。
【図7】ドーズ条件振りウェハの一例を示す図である。
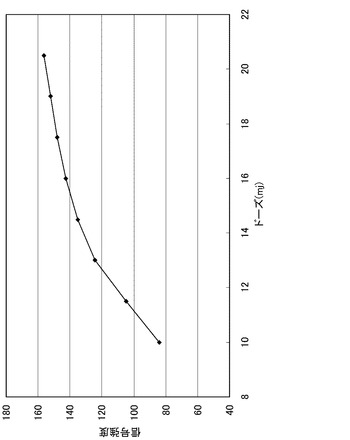
【図8】ドーズカーブの一例を示す図である。
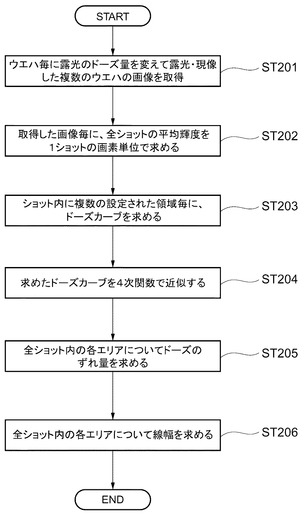
【図9】ウェハの表面における線幅の分布を求める方法を示すフローチャートである。
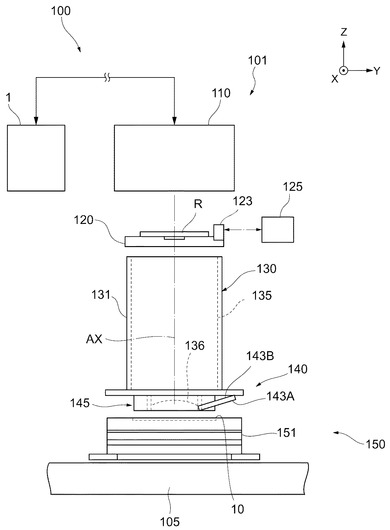
【図10】露光システムの概要構成図である。
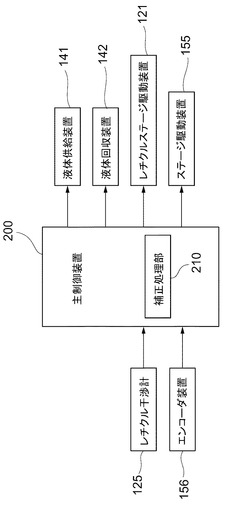
【図11】露光装置の制御ブロック図である。
【発明を実施するための形態】
【0011】
以下、図面を参照して本発明の好ましい実施形態について説明する。本実施形態の表面
検査装置を図1に示しており、この装置により基板である半導体ウェハ10(以下、ウェ
ハ10と称する)の表面を検査する。本実施形態の表面検査装置1は、図1に示すように
、略円盤形のウェハ10を支持するステージ5を備え、不図示の搬送装置によって搬送さ
れてくるウェハ10は、ステージ5の上に載置されるとともに真空吸着によって固定保持
される。ステージ5は、ウェハ10の回転対称軸(ステージ5の中心軸)を回転軸として
、ウェハ10を回転(ウェハ10の表面内での回転)可能に支持する。この回転によるウ
ェハの向きを、便宜的にウェハ方位角度と称することにする。また、ステージ5は、ウェ
ハ10を支持する支持面を通る軸を中心に、ウェハ10をチルト(傾動)させることが可
能であり、照明光の入射角を調整できるようになっている。
【0012】
表面検査装置1はさらに、ステージ5に支持されたウェハ10の表面全面に照明光を平
行光として照射する照明系20と、照明光の照射を受けたときのウェハ10の全面からの
反射光や回折光等を集光する受光系30と、受光系30により集光された光を受けてウェ
ハ10の表面の像を検出する撮像装置35と、画像処理部40と、検査部42と、記憶部
45とを備えて構成される。照明系20は、照明光を射出する照明ユニット21と、照明
ユニット21から射出された照明光をウェハ10の表面に向けて反射させる照明側凹面鏡
25とを有して構成される。照明ユニット21は、メタルハライドランプや水銀ランプ等
の光源部22と、光源部22からの光のうち所定の波長を有する光を抽出し強度を調節す
る調光部23と、調光部23からの光を照明光として照明側凹面鏡25へ導く導光ファイ
バ24とを有して構成される。
【0013】
そして、光源部22からの光は調光部23を通過し、所定の波長(例えば、248nm
の波長)を有する所定の強度の照明光が導光ファイバ24から照明側凹面鏡25へ射出さ
れ、導光ファイバ24から照明側凹面鏡25へ射出された照明光は、導光ファイバ24の
射出部が照明側凹面鏡25の焦点面に配置されているため、照明側凹面鏡25により平行
光束となってステージ5に保持されたウェハ10の表面に照射される。なお、ウェハ10
に対する照明光の入射角と出射角との関係は、ステージ5をチルト(傾動)させてウェハ
10の載置角度を変化させることにより調整可能である。
【0014】
なお、表面検査装置1は、主制御部50と、主制御部50に接続されたハードウェア制
御部55とをさらに備えており、主制御部50はハードウェア制御部55を介して光源部
22と調光部23を制御する。また、主制御部50は、撮像装置35から出力された画像
信号を受け、画像処理部40に送る。画像処理部40で処理された画像データは主制御部
50により検査部42に送られ検査が行われる。検査結果および画像データは主制御部5
0により記憶部45に送られ記憶される。
【0015】
また、導光ファイバ24と照明側凹面鏡25との間には、照明側偏光フィルタ26が光
路上へ挿抜可能に設けられており、図1に示すように、照明側偏光フィルタ26を光路上
から抜去した状態で回折光を利用した検査(以下、便宜的に回折検査と称する)が行われ
、図2に示すように、照明側偏光フィルタ26を光路上に挿入した状態で偏光(構造性複
屈折による偏光状態の変化)を利用した検査(以下、便宜的にPER検査と称する)が行
われるようになっている(照明側偏光フィルタ26の詳細については後述する)。
【0016】
ウェハ10の表面からの出射光(回折光もしくは反射光)は受光系30により集光され
る。受光系30は、ステージ5に対向して配設された受光側凹面鏡31を主体に構成され
、受光側凹面鏡31により集光された出射光(回折光もしくは反射光)は、撮像装置35
の撮像面上に達し、ウェハ10の像が結像される。
【0017】
また、受光側凹面鏡31と撮像装置35との間には、受光側偏光フィルタ32が光路上
へ挿抜可能に設けられており、図1に示すように、受光側偏光フィルタ32を光路上から
抜去した状態で回折検査が行われ、図2に示すように、受光側偏光フィルタ32を光路上
に挿入した状態でPER検査が行われるようになっている(受光側偏光フィルタ32の詳
細については後述する)。
【0018】
撮像装置35は、撮像面上に形成されたウェハ10の表面の像を光電変換して画像信号
(デジタル画像データ)を生成し、主制御部50を介して画像信号を画像処理部40に出
力する。画像処理部40は、撮像装置35から入力されたウェハ10の画像信号に基づい
て、ウェハ10のデジタル画像を生成する。記憶部45には、良品ウェハの画像データが
予め記憶されており、検査部42は、主制御部50からウェハ10の画像データと良品ウ
ェハの画像データとを受け取り比較して、ウェハ10の表面における欠陥(異常)の有無
を検査する。そして、検査部42による検査結果およびそのときのウェハ10の画像が図
示しない画像表示装置で出力表示される。また、検査部42は、ウェハの画像を利用して
露光装置101による露光時のドーズ量を求めることができる(詳細は後述する)。
【0019】
ところで、ウェハ10は、露光装置101により最上層のレジスト膜に対して所定のマ
スクパターンが投影露光され、現像装置(図示せず)による現像後、不図示の搬送装置に
より、不図示のウェハカセットまたは現像装置からステージ5上に搬送される。なおこの
とき、ウェハ10は、ウェハ10のパターンもしくは外縁部(ノッチやオリエンテーショ
ンフラット等)を基準としてアライメントが行われた状態で、ステージ5上に搬送される
。なお、ウェハ10の表面には、図3に示すように、複数のチップ領域11(ショット)
が縦横に(図3におけるXY方向に)配列され、各チップ領域11の中には、半導体パタ
ーンとしてラインパターンまたはホールパターン等の繰り返しパターン12が形成されて
いる。
【0020】
また、露光装置101は、前述のステップ・アンド・スキャン方式の露光装置であり、
例えば、X方向の左端から奇数番目のショットの列に対して、+Y方向(図3の下方から
上方)に走査露光を行うとともに、X方向の左端から偶数番目のショットの列に対して、
−Y方向(図3の上方から下方)に走査露光を行うようになっている。すなわち、露光装
置101により、ウェハ10に対して、一方の走査方向もしくはこれとは逆の他方の走査
方向で走査露光が行われる。なお、露光装置101は、ケーブル等を介して本実施形態の
表面検査装置1と電気的に接続されている。
【0021】
以上のように構成される表面検査装置1を用いて、ウェハ10表面の回折検査を行うに
は、まず、図1に示すように照明側偏光フィルタ26および受光側偏光フィルタ32を光
路上から抜去し、不図示の搬送装置により、ウェハ10をステージ5上に搬送する。なお
、搬送の途中で不図示のアライメント機構によりウェハ10の表面に形成されているパタ
ーンの位置情報を取得しており、ウェハ10をステージ5上の所定の位置に所定の方向で
載置することができる。
【0022】
次に、ウェハ10の表面上における照明方向とパターンの繰り返し方向とが一致(ライ
ンパターンの場合、ラインに対して直交)するようにステージ5を回転させるとともに、
パターンのピッチをPとし、ウェハ10の表面に照射する照明光の波長をλとし、照明光
の入射角をθ1とし、n次回折光の出射角をθ2としたとき、ホイヘンスの原理より、次
の(1)式を満足するように設定を行う(ステージ5をチルトさせる)。
【0023】
P=n×λ/{sin(θ1)−sin(θ2)} …(1)
【0024】
次に、照明系20により照明光をウェハ10の表面に照射する。このような条件で照明
光をウェハ10の表面に照射する際、照明ユニット21における光源部22からの光は調
光部23を通過し、所定の波長(例えば、248nmの波長)を有する所定の強度の照明
光が導光ファイバ24から照明側凹面鏡25へ射出され、照明側凹面鏡25で反射した照
明光が平行光束となってウェハ10の表面に照射される。ウェハ10の表面で回折した回
折光は、受光側凹面鏡31により集光されて撮像装置35の撮像面上に達し、ウェハ10
の像(回折像)が結像される。ウェハ方位角度、照明波長、照明角度、射出角度、回折次
数などの組み合わせで決まる回折光の条件を回折条件と称する。
【0025】
そこで、撮像装置35は、撮像面上に形成されたウェハ10の表面の像を光電変換して
画像信号を生成し、主制御部50を介して画像信号を画像処理部40に出力する。画像処
理部40は、撮像装置35から入力されたウェハ10の画像信号に基づいて、ウェハ10
のデジタル画像(以下、回折光に基づくウェハ10のデジタル画像を便宜的に回折画像と
称する)を生成する。また、画像処理部40は、ウェハ10の回折画像を生成すると主制
御部50を介して回折画像を検査部42へ送り、検査部42は、ウェハ10の画像データ
と良品ウェハの画像データとを比較して、ウェハ10の表面における欠陥(異常)の有無
を検査する。そして、検査部42による検査結果およびそのときのウェハ10の回折画像
が図示しない画像表示装置で出力表示される。
【0026】
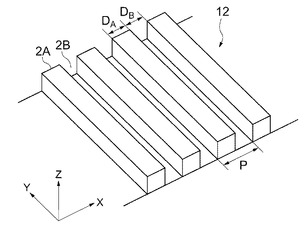
次に、表面検査装置1によりウェハ10表面のPER検査を行う場合について説明する
。なお、繰り返しパターン12は、図4に示すように、複数のライン部2Aがその短手方
向(X方向)に沿って一定のピッチPで配列されたレジストパターン(ラインパターン)
であるものとする。また、隣り合うライン部2A同士の間は、スペース部2Bである。ま
た、ライン部2Aの配列方向(X方向)を「繰り返しパターン12の繰り返し方向」と称
することにする。
【0027】
ここで、繰り返しパターン12におけるライン部2Aの線幅DAの設計値をピッチPの
1/2とする。設計値の通りに繰り返しパターン12が形成された場合、ライン部2Aの
線幅DAとスペース部2Bの線幅DBは等しくなり、ライン部2Aとスペース部2Bとの体
積比は略1:1になる。これに対して、繰り返しパターン12を形成する際の露光フォー
カスが適正値から外れると、ピッチPは変わらないが、ライン部2Aの線幅DAが設計値
と異なってしまうとともに、スペース部2Bの線幅DBとも異なってしまい、ライン部2
Aとスペース部2Bとの体積比が略1:1から外れる。
【0028】
PER検査は、上記のような繰り返しパターン12におけるライン部2Aとスペース部
2Bとの体積比の変化を利用して、繰り返しパターン12の異常検査を行うものである。
なお、説明を簡単にするため、理想的な体積比(設計値)を1:1とする。体積比の変化
は、露光フォーカスの適正値からの外れに起因し、ウェハ10のショット領域ごとに現れ
る。なお、体積比を断面形状の面積比と言い換えることもできる。
【0029】
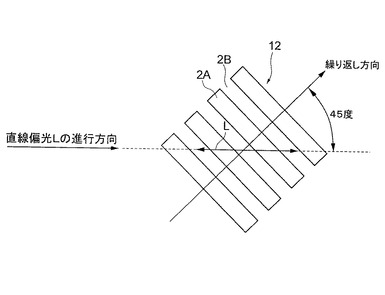
PER検査では、図2に示すように、照明側偏光フィルタ26および受光側偏光フィル
タ32が光路上に挿入される。また、PER検査を行うとき、ステージ5は、照明光が照
射されたウェハ10からの正反射光を受光系30で受光できる傾斜角度にウェハ10をチ
ルトさせるとともに、所定の回転位置で停止し、ウェハ10における繰り返しパターン1
2の繰り返し方向を、図5に示すように、ウェハ10の表面における照明光(直線偏光L
)の振動方向に対して、45度だけ斜めになるように保持する。繰り返しパターン12の
検査の光量を最も高くするためである。また、22.5度や67.5度とすれば検査の感
度が高くなる。なお、角度はこれらに限らず、任意角度方向に設定可能である。
【0030】
照明側偏光フィルタ26は、導光ファイバ24と照明側凹面鏡25との間に配設される
とともに、その透過軸が所定の方位に設定され、透過軸に応じて照明ユニット21からの
光から直線偏光を抽出する。このとき、導光ファイバ24の射出部が照明側凹面鏡25の
焦点位置に配置されているため、照明側凹面鏡25は、照明側偏光フィルタ26を透過し
た光を平行光束にして、基板であるウェハ10を照明する。このように、導光ファイバ2
4から射出された光は、照明側偏光フィルタ26および照明側凹面鏡25を介しp偏光の
直線偏光L(図5を参照)となり、照明光としてウェハ10の表面全体に照射される。
【0031】
このとき、直線偏光Lの進行方向(ウェハ10表面上の任意の点に到達する直線偏光L
の主光線の方向)は光軸に略平行であることから、ウェハ10の各点における直線偏光L
の入射角度は、平行光束のため互いに同じとなる。また、ウェハ10に入射する直線偏光
Lがp偏光であるため、図5に示すように、繰り返しパターン12の繰り返し方向が直線
偏光Lの入射面(ウェハ10の表面における直線偏光Lの進行方向)に対して45度の角
度に設定された場合、ウェハ10の表面における直線偏光Lの振動方向と繰り返しパター
ン12の繰り返し方向とのなす角度も、45度に設定される。言い換えると、直線偏光L
は、ウェハ10の表面における直線偏光Lの振動方向が繰り返しパターン12の繰り返し
方向に対して45度傾いた状態で、繰り返しパターン12を斜めに横切るようにして繰り
返しパターン12に入射することになる。
【0032】
ウェハ10の表面で反射した正反射光は、受光系30の受光側凹面鏡31により集光さ
れて撮像装置35の撮像面上に達するが、このとき、繰り返しパターン12での構造性複
屈折により直線偏光Lの偏光状態が変化する。受光側偏光フィルタ32は、受光側凹面鏡
31と撮像装置35との間に配設され、受光側偏光フィルタ32の透過軸の方位は、上述
した照明側偏光フィルタ26の透過軸に対して直交するように設定されている(クロスニ
コルの状態)。したがって、受光側偏光フィルタ32により、ウェハ10(繰り返しパタ
ーン12)からの正反射光のうち直線偏光Lと振動方向が略直角な偏光成分(例えば、s
偏光の成分)を通過させて、撮像装置35に導くことができる。その結果、撮像装置35
の撮像面には、ウェハ10からの正反射光のうち直線偏光Lに対して振動方向が略直角な
偏光成分によるウェハ10の反射像が形成される。なお、受光側偏光フィルタ32を光軸
を中心に回動可能とし、楕円偏光化した正反射光の短軸方向と受光側偏光フィルタ32の
透過軸を合わせるように調整することで、感度を向上させることができる。この場合も調
整角度は数度であり、直交の範疇である。
【0033】
表面検査装置1によりウェハ10表面のPER検査を行うには、まず、図2に示すよう
に照明側偏光フィルタ26および受光側偏光フィルタ32を光路上に挿入し、不図示の搬
送装置により、ウェハ10をステージ5上に搬送する。なお、搬送の途中で不図示のアラ
イメント機構によりウェハ10の表面に形成されているパターンの位置情報を取得してお
り、ウェハ10をステージ5上の所定の位置に所定の方向で載置することができる。また
このとき、ステージ5は、照明光が照射されたウェハ10からの正反射光を受光系30で
受光できる傾斜角度にウェハ10をチルトさせるとともに、所定の回転位置で停止し、ウ
ェハ10における繰り返しパターン12の繰り返し方向を、ウェハ10の表面における照
明光(直線偏光L)の振動方向に対して、45度だけ斜めになるように保持する。
【0034】
次に、照明系20により照明光をウェハ10の表面に照射する。このような条件で照明
光をウェハ10の表面に照射する際、照明ユニット21の導光ファイバ24から射出され
た光は、照明側偏光フィルタ26および照明側凹面鏡25を介しp偏光の直線偏光Lとな
り、照明光としてウェハ10の表面全体に照射される。ウェハ10の表面で反射した正反
射光は、受光側凹面鏡31により集光されて撮像装置35の撮像面上に達し、ウェハ10
の像(反射像)が結像される。
【0035】
このとき、繰り返しパターン12での構造性複屈折により直線偏光Lの偏光状態が変化
し、受光側偏光フィルタ32は、ウェハ10(繰り返しパターン12)からの正反射光の
うち直線偏光Lと振動方向が略直角な偏光成分を通過させて(すなわち、直線偏光Lの偏
光状態の変化を抽出して)、撮像装置35に導くことができる。その結果、撮像装置35
の撮像面には、ウェハ10からの正反射光のうち直線偏光Lと振動方向が略直角な偏光成
分によるウェハ10の反射像が形成される。
【0036】
そこで、撮像装置35は、撮像面上に形成されたウェハ10の表面の像(反射像)を光
電変換して画像信号(デジタル画像データ)を生成し、主制御部50を介して画像信号を
画像処理部40に出力する。画像処理部40は、撮像装置35から入力されたウェハ10
の画像信号に基づいて、ウェハ10のデジタル画像(以下、偏光に基づくウェハ10のデ
ジタル画像を便宜的に偏光画像と称する)を生成する。また、画像処理部40は、ウェハ
10の偏光画像を生成すると主制御部50を介して偏光画像を検査部42へ送り、検査部
42は、ウェハ10の画像データと良品ウェハの画像データとを比較して、ウェハ10の
表面における欠陥(異常)の有無を検査する。なお、良品ウェハの反射画像の信号強度(
輝度値)は、最も高い信号強度(輝度値)を示すものと考えられるため、例えば、良品ウ
ェハと比較した信号強度変化(輝度変化)が予め定められた閾値(許容値)より大きけれ
ば「異常」と判定し、閾値より小さければ「正常」と判断する。そして、検査部42によ
る検査結果およびそのときのウェハ10の偏光画像が図示しない画像表示装置で出力表示
される。
【0037】
なお、信号強度とは、回折効率、強度比、エネルギー比等、撮像装置35の撮像素子で
検出される光に応じた信号強度である。また、上述した回折検査およびPER検査に限ら
ず、ウェハ10表面からの正反射光に基づく検査(以下、便宜的に正反射検査と称する)
を行うことも可能である。正反射検査を行う場合、画像処理部40は、ウェハ10表面か
らの正反射光に基づくデジタル画像(以下、便宜的に正反射画像と称する)を生成し、生
成したウェハ10の正反射画像に基づいて、ウェハ10の表面における欠陥(異常)の有
無を検査する。
【0038】
また、検査部42は、ウェハ10の回折画像等から、露光装置101による露光時のド
ーズ量を求めることができる。なお、ドーズとは、パターンを形成する際のエネルギー量
である。さらに、繰り返しパターン12の線幅とドーズ量との関係を予めテンプレート化
することにより、検査部42は、求めたドーズ量から繰り返しパターン12の線幅を算出
することができる。そのため、検査部42は、ウェハ10の回折画像等から、露光装置1
01により一方の走査方向(以下、便宜的に正方向と称する)で走査露光される繰り返し
パターン12の線幅と、これとは逆の他方の走査方向(以下、便宜的に逆方向と称する)
で走査露光される繰り返しパターン12の線幅との差を求めることができる。
【0039】
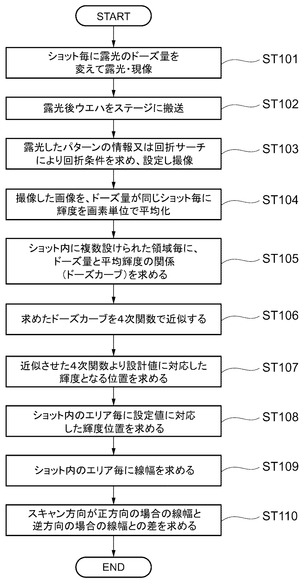
正方向で走査露光される繰り返しパターン12の線幅と逆方向で走査露光される繰り返
しパターン12の線幅との差を求める方法について、図6に示すフローチャートを参照し
ながら説明する。まず、露光装置101のドーズ量を変化させて繰り返しパターンを形成
したウェハを作製する(ステップST101)。このとき、露光ショット毎にドーズ量を
ばらばらに変化させて露光し現像する。以下、このようなウェハをドーズ条件振りウェハ
10a(図7を参照)と称することにする。ここで、ドーズ量をばらばらにするのは、ウ
ェハの中央側と外周側の間に発生するレジスト条件の相違などの影響を相殺する目的で行
う。
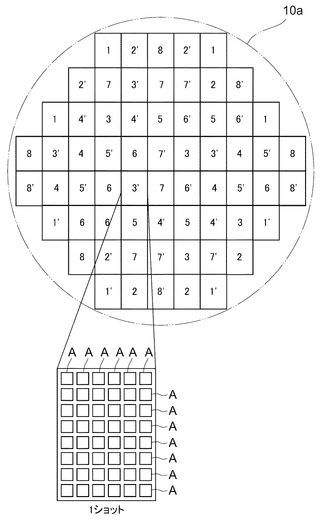
【0040】
本実施形態のドーズ条件振りウェハ10aは、図7に示すように、ドーズ量を1.5m
J刻みで8段階(10.0mJ、11.5mJ、13.0mJ、14.5mJ、16.0
mJ、17.5mJ、19.0mJ、20.5mJ)に振っている。なお、図7の各ショ
ットには、1.5mJ刻みで振ったドーズオフセットの段階を示しており、段階が同じで
走査方向(スキャン方向)が逆方向の場合には「´」を付している。例えば、番号6で表
したショットは、同じドーズ量で行う露光を、レチクル移動Y+方向/中央側で2ショッ
ト・レチクル移動Y+方向/外周側で2ショット・レチクル移動Y−方向/中央側で2シ
ョット・レチクル移動Y−方向/外周側で2ショットのように8箇所設定している。また
例えば、番号1で表したショットは、同じドーズ量で行う露光を、条件振りウェハ10a
の中心を対称軸として、レチクル移動Y+方向/外周側で4ショット・レチクル移動Y−
方向/外周側で4ショットのように8箇所設定している。本実施形態では、このようにド
ーズオフセットを8段階、各ドーズ量で8ショットの合計64ショットでドーズ条件振り
ウェハ10aを作っている。なお、パターン露光に要する露光量は、パターンによって5
mJ〜40mJ程度であり、ドーズ条件振りウェハを作る際の振り幅は、0.5mJ〜2
.0mJとすることが望ましい。
【0041】
なお、ドーズ条件振りウェハを、複数枚にわたって作製するようにしてもよい。その場
合、各条件振りウェハのドーズ量毎のショット配置は、ドーズ量以外の条件による影響を
相殺するように設定することが好ましい。
【0042】
ドーズ条件振りウェハ10aを作製すると、回折検査の場合と同様にして、ドーズ条件
振りウェハ10aをステージ5上に搬送する(ステップST102)。次に、回折検査の
場合と同様に、照明系20が照明光をドーズ条件振りウェハ10aの表面に照射し、撮像
装置35がドーズ条件振りウェハ10aの像を光電変換して画像信号を生成し、主制御部
50を介して画像信号を画像処理部40に出力する(ステップST103)。このとき、
ドーズ条件振りウェハ10aについて、露光したパターンのピッチ情報または回折条件サ
ーチを利用して回折条件を求め、回折光が得られるように回折検査の場合と同様の設定を
行う。回折条件サーチとは、正反射以外の角度範囲でステージ5のチルト角度を段階的に
変化させてそれぞれのチルト角度で画像を取得し、画像が明るくなる、すなわち回折光が
得られるチルト角度を求める機能のことを指す。なお、ドーズ条件振りウェハ10aの方
位角(露光したパターンの照明光の照明方向に対する姿勢)は、露光したパターンの繰り
返し方向(ラインアンドスペースのパターンの場合ラインと直交する方向)と照明方向が
一致するように配置されている。
【0043】
次に、画像処理部40は、撮像装置35から入力されたドーズ条件振りウェハ10aの
画像信号に基づいて、ドーズ条件振りウェハ10aの回折画像(デジタル画像)を生成す
る。また、画像処理部40は、ドーズ条件振りウェハ10aの回折画像を生成すると主制
御部50を介して回折画像を検査部42へ送り、検査部42は、ドーズ量および走査方向
(スキャン方向)が同じショット毎に画素単位(それぞれのショットの対応する部分の画
素同士)で信号強度(輝度)の平均化を行う(ステップST104)。なお、回折検査で
欠陥と判断された部分については、前述の平均化の対象から除外する。
【0044】
このとき、検査部42は、平均化によって得られた(互いにドーズ量の異なる)走査方
向が正方向の全てのショットについて、図7に示すショット内に設定した複数の設定領域
(小さな長方形で囲んだ領域)Aでの信号強度の平均値(以下、便宜的に平均輝度と称す
る)をそれぞれ求める。またこのとき、検査部42は、平均化によって得られた(互いに
ドーズ量の異なる)走査方向が逆方向の全てのショットについて、複数の設定領域Aでの
平均輝度をそれぞれ求める。なお、ドーズ条件振りウェハ10aは、露光装置101のド
ーズ量をショット毎に変化させているため、ショットの位置からドーズ量を求めることが
でき、異なるドーズ量で露光されたそれぞれのショット内の同位置の設定領域Aにおいて
、ドーズ量に応じて平均輝度が変化することになる。
【0045】
そこで、検査部42は、平均輝度を求めた設定領域Aごとに、(互いにドーズ量の異な
る)走査方向が正方向の各ショットにおける同位置の設定領域Aでの平均輝度と、これに
対応するドーズ量との関係を示すグラフ(以下、ドーズカーブと称する)を求める。また
、検査部42は、平均輝度を求めた設定領域Aごとに、(互いにドーズ量の異なる)走査
方向が逆方向の各ショットにおける同位置の設定領域Aでの平均輝度と、これに対応する
ドーズ量との関係を示すグラフ、すなわちドーズカーブを求める(ステップST105)
。ここで、ドーズカーブの一例を図8に示す。なお、このステップで求めた走査方向が正
方向のショットにおけるドーズカーブを正方向基準ドーズカーブと称し、走査方向が逆方
向のショットにおけるドーズカーブを逆方向基準ドーズカーブと称する。
【0046】
次に、検査部42は、正方向基準ドーズカーブおよび逆方向基準ドーズカーブを関数で
近似した近似曲線を設定領域Aごとにそれぞれ求める(ステップST106)。なお、近
似曲線の関数には、4次関数(4次式)を用いるのが好ましい。また、4次関数は次の(
2)式のように表される。
【0047】
y=ax4+bx3+cx2+dx+e …(2)
【0048】
ここで、xはドーズ量であり、yは信号強度(平均輝度)であり、a,b,c,d,e
は係数である。最小二乗法などを用いて、ドーズカーブを近似するための最適な係数a,
b,c,d,eを求めることにより、(2)式の近似関数が得られる。
【0049】
次に、検査部42は、正方向基準ドーズカーブの近似曲線において設計値に対応した輝
度(信号強度)となるドーズ量と、逆方向基準ドーズカーブの近似曲線において設計値に
対応した輝度(信号強度)となるドーズ量をそれぞれ求める(ステップST107)。こ
のとき、設計値に対応した輝度(信号強度)となるドーズ量を設定領域Aごとに求める(
ステップST108)。このようにすれば、走査方向が正方向のショット内におけるドー
ズ量の分布と、走査方向が逆方向のショット内におけるドーズ量の分布をそれぞれ求める
ことができる。なお、ドーズカーブの近似曲線における設計値に対応した輝度(信号強度
)は、予め線幅が設計値と一致したパターンを用いて求めておく。
【0050】
前述したように、繰り返しパターン12の線幅とドーズ量との関係は、データマップ等
として予めテンプレート化され、記憶部45に記憶されている。検査部42は、記憶部4
5に記憶されたデータマップを用いて、走査方向が正方向のショット内におけるドーズ量
から、正方向で走査露光される繰り返しパターン12の線幅を設定領域Aごとに求める。
また、検査部42は、記憶部45に記憶されたデータマップを用いて、走査方向が逆方向
のショット内におけるドーズ量から、逆方向で走査露光される繰り返しパターン12の線
幅を設定領域Aごとに求める(ステップST109)。このとき、線幅が設定領域Aごと
に求められるので、走査方向が正方向のショット内における線幅の分布と、走査方向が逆
方向のショット内における線幅の分布をそれぞれ求めることができる。
【0051】
次に、検査部42は、正方向で走査露光される繰り返しパターン12の線幅と、逆方向
で走査露光される繰り返しパターン12の線幅との差を設定領域Aごとに求める(ステッ
プST110)。このとき、線幅の差が設定領域Aごとに求められるので、走査方向の違
いによるショット内での線幅の差の分布を求めることができる。このようにして求めた走
査方向の違いによる線幅の差は、例えば、露光装置101に合わせたパラメータに変換さ
れ、検査部42から信号出力部60を介して露光装置101に出力されて、露光装置10
1による露光に反映される。このとき例えば、走査方向が正方向のショット内における線
幅の分布と、走査方向が逆方向のショット内における線幅の分布のうち、線幅のバラツキ
(分散値)が小さい方に合わせるように露光装置101の調整が行われる。このように、
検査部42は、ドーズ量(露光量)および線幅の差を求める演算・評価機能を有している
。
【0052】
走査方向によって露光装置101のスキャン精度が異なる場合、露光装置101のレチ
クルステージ120とステージ装置150(図10を参照)の同期駆動精度が低いことが
考えられ、特に、走査露光(スキャン)を開始するとき、加速度が大きくなるので、走査
方向の違いによるスキャン精度の差異が生じやすい。走査方向の違いによるスキャン精度
の差異が生じると、フォーカスは変わらないが、1ショットあたりのドーズ量に差が生じ
るため、露光装置101に露光された繰り返しパターン12の線幅にも走査方向の違いに
よって差が生じることになる。
【0053】
このように、本実施形態の表面検査装置1によれば、一方の走査方向で走査露光される
繰り返しパターン12の線幅と、他方の走査方向で走査露光される繰り返しパターン12
の線幅との差(すなわち、走査方向の違いによる線幅のバラツキ)を求めることにより、
露光装置101における走査方向の違いによって生じるスキャン精度の差異を求めること
が可能になる。また、求めた線幅の差を露光装置101にフィードバックすることで、ウ
ェハ全面において露光・現像されたパターンの線幅を設計値通りにすることができる。
【0054】
また、ウェハの表面から生じた回折光による像を撮像するようにすれば、レジスト膜等
の膜厚変動による影響を受けにくいため、露光時のドーズ量(すなわち、繰り返しパター
ン12の線幅)を精度よく計測することが可能である。特に、照明光の波長は、248n
mや313nm(j線)等の深紫外域の波長が望ましい。また、複数の回折条件を用いて
露光時のドーズ量を求めるようにすれば、例えば、各回折条件について平均化することに
より、さらなる精度向上が期待できる。また、対象となる様々なパターンごとに最適な回
折条件を選択することで、感度の高い、高精度な計測が可能になる。
【0055】
なお、検査部42は、露光装置101のドーズ量をウェハごとに変化させて露光し現像
した複数のウェハの画像を利用して、ウェハ10の表面全体に対するドーズの変動状態を
求めることもできる。前述したように、検査部42は、ドーズ量から繰り返しパターン1
2の線幅を算出することができるので、ウェハ10の表面全体に対するドーズの変動状態
から、ウェハ10の表面における線幅の分布を求めることができる。そこで、ウェハ10
の表面における線幅の分布を求める方法について、図9に示すフローチャートを参照しな
がら説明する。まず、露光装置101のドーズ量をウェハごとに変化させて露光し現像し
た複数のウェハ(ドーズ量が10.0mJ、11.5mJ、13.0mJ、14.5mJ
、16.0mJ、17.5mJ、19.0mJ、20.5mJである8つのウェハ)の画
像を取得する(ステップST201)。このとき、ウェハの照明および撮像等は、回折検
査の場合と同様(最適なドーズ量と最適なフォーカス条件で露光・現像されたパターンか
ら所定の信号強度が得られる条件)にして行う。ここで、ドーズ量が異なる複数のウェハ
を計測用ウェハと称することにする。
【0056】
次に、検査部42は、取得したウェハの画像から、露光装置101のドーズ量を変化さ
せた計測用ウェハごとに、信号強度を画素単位(または少数の画素で形成される設定領域
の平均値、以下同じ)で求める(ステップST202)。画素単位であっても、少数の画
素で形成される設定領域であっても、便宜上設定領域Aと称し、その信号強度(または平
均値)を平均輝度と称することにする。次に、検査部42は、ショットの設定領域Aごと
に、(互いにフォーカスオフセット量の異なる)各ウェハにおける同位置の設定領域Aで
の平均輝度と、これに対応するドーズ量との関係を示すグラフ、すなわちドーズカーブ(
ドーズ条件振りウェハ10aで求めた基準となるドーズカーブと区別するため、以降適宜
サンプルドーズカーブと称する)を求める(ステップST203)。なお、サンプルドー
ズカーブを近似する際も近似曲線として4次関数を用いることが好ましい(ステップST
204)。このとき、露光装置101のドーズオフセットを計測用ウェハごとに変化させ
ているため、計測用ウェハの種類からドーズ量を求めることができ、ショット内の同位置
の設定領域Aにおいて、ドーズ量に応じて平均輝度が変化することになる。
【0057】
次に、検査部42は、求めたサンプルドーズカーブを利用して、全てのショットの設定
領域Aについて、各設定領域Aのサンプルドーズカーブに対応するドーズのずれ量をそれ
ぞれ求める(ステップST205)。具体的には、図示しないメモリに記憶された、各設
定領域Aのサンプルドーズカーブと、対応する設定領域Aの正方向基準ドーズカーブもし
くは逆方向基準ドーズカーブとの相関が最も良くなるようにフィッティング(いわゆるパ
ターンマッチング)を行う。このとき、ドーズ量の増減方向への移動量が即ちその設定領
域Aのドーズのずれ量となる。なお、各ショットの走査方向に応じて、正方向基準ドーズ
カーブもしくは逆方向基準ドーズカーブが選択される。
【0058】
このようにすれば、ウェハ表面上でのドーズのずれ量の分布を求めることができるため
、ウェハの表面全体に対するドーズの変動状態を求めることが可能になる。そして、検査
部42は、記憶部45に記憶されたデータマップを用いて、各設定領域Aにおけるドーズ
のずれ量から、繰り返しパターン12の線幅を設定領域Aごとに求める(ステップST2
06)。このとき、線幅が設定領域Aごとに求められるので、ウェハの表面における線幅
の分布を求めることができる。すなわち、ウェハ表面上での、走査方向が正方向のショッ
ト内における線幅の分布と、走査方向が逆方向のショット内における線幅の分布をそれぞ
れ求めることができ、検査部42は、ウェハの表面における走査方向の違いによる線幅の
バラツキを求めることが可能である。このとき例えば、走査方向が正方向の或る1つのシ
ョットと、走査方向が逆方向の各ショットとの線幅の差をそれぞれ求めることができる。
また例えば、走査方向が正方向のショットと、これに隣接する走査方向が逆方向のショッ
トとの線幅の差をそれぞれ求めることができる。さらに、検査部42は、走査方向の違い
による線幅のバラツキ(線幅の差)を、例えば、露光装置101に合わせたパラメータに
変換し、信号出力部60を介して露光装置101に出力することも可能である。
【0059】
なお、走査方向が全て正方向である計測用ウェハと、走査方向が全て逆方向である計測
用ウェハを用いて、各ウェハの表面における線幅の分布を求め、ウェハの表面全体での線
幅の差を求めるようにしてもよい。
【0060】
また、検査部42で求められた繰り返しパターン12の線幅から、繰り返しパターン1
2における異常の有無を検査するようにすれば、繰り返しパターン12の線幅を基準とす
るため検査の基準が明確となり、繰り返しパターン12の異常の有無を精度よく検査する
ことができる。このとき例えば、検査部42は、求めた繰り返しパターン12の線幅が所
定の範囲内であれば正常と判定し、所定の範囲から外れた場合に異常と判定することがで
きる。
【0061】
なお、上述の実施形態において、一方の走査方向で走査露光される繰り返しパターン1
2の線幅と、他方の走査方向で走査露光される繰り返しパターン12の線幅との差を求め
ているが、これに限られるものではない。例えば、一方の走査方向で走査露光されたショ
ットに対するドーズ量(露光量)と、他方の走査方向で走査露光されたショットに対する
ドーズ量との走査方向による差を求めるようにしてもよい。このようにしても、露光装置
101における走査方向の違いによって生じるスキャン精度の差異を求めることが可能で
ある。また、求めたドーズ量の差を露光装置101にフィードバックすることで、ウェハ
全面において露光・現像されたパターンの線幅を設計値通りにすることができる。なおこ
の場合、一方の走査方向で走査露光されたショットに対するドーズ量の分布と、他方の走
査方向で走査露光されたショットに対するドーズ量の分布のうち、ドーズ量のバラツキ(
分散値)が小さい方に合わせるように露光装置101の調整が行われる。
【0062】
また、スキャン精度に限らず、ミックスアンドマッチのように分割露光する場合には、
それぞれの分割領域のドーズ量(露光量)を求めることができる。そのため、ドーズ量が
適正量からずれている場合に、各分割領域のドーズ量をそれぞれ調整することが可能であ
る。
【0063】
また、上述の実施形態において、ドーズカーブの近似曲線の式として4次式を用いるの
が好ましいとしたが、グラフの形状によっては、直線近似を行うようにしてもよい。
【0064】
また、上述の実施形態において、回折検査と同様な手法により走査方向による線幅の差
を求める技術を説明したが、PER検査(偏光検査)と同様な手法によっても走査方向に
よる線幅の差を求めることができる。
【0065】
例えば、図6に示すフローチャートのステップST103において、照明系20が照明
光として直線偏光Lをドーズ条件振りウェハ10aの表面に照射し、撮像装置35がドー
ズ条件振りウェハ10aの反射像を光電変換して画像信号を生成し、主制御部50を介し
て画像信号を画像処理部40に出力すればよい。これにより、検査部42は、ドーズ条件
振りウェハ10aの偏光画像を利用して、偏光によるドーズカーブを求めることができる
。検査部42は、このドーズカーブを利用して、偏光の輝度(信号強度)が設計値に対応
する値となるドーズ量を求め、求めたドーズ量から繰り返しパターン12の線幅を算出す
るようにすれば、回折光の場合と同様に、正方向で走査露光される繰り返しパターン12
の線幅と、逆方向で走査露光される繰り返しパターン12の線幅との差を求めることがで
きる。
【0066】
また、上述の実施形態において、検査部42で求められた走査方向による線幅の差を、
検査部42から信号出力部60を介して露光装置101に出力して、露光装置101の設
定にフィードバックすることができる。そこで、前述の表面検査装置1を備えた露光シス
テムについて、図10および図11を参照しながら説明する。この露光システム100は
、レジストが塗布されたウェハ10の表面に所定のマスクパターン(繰り返しパターン)
を投影露光する露光装置101と、露光装置101による露光工程および現像装置(図示
せず)による現像工程等を経て、表面に繰り返しパターン12が形成されたウェハ10の
検査を行う表面検査装置1とを備えて構成される。
【0067】
露光装置101は、図10に示すように、照明系110と、レチクルステージ120と
、投影ユニット130と、局所液浸装置140と、ステージ装置150と、主制御装置2
00(図11を参照)とを備えて構成される。なお、以下においては、図10に示した矢
印X,Y,Zの方向をそれぞれX軸方向、Y軸方向、Z軸方向として説明する。
【0068】
照明系110は、詳細な図示を省略するが、光源と、オプティカルインテグレータ等を
備えた照度均一化光学系と、レチクルブラインド等を備えた照明光学系とを有し、レチク
ルブラインドで規定されたレチクルR上のスリット状の照明領域を照明光(露光光)によ
り略均一な照度で照明するように構成されている。照明光としては、例えば、ArFエキ
シマレーザ光(波長193nm)が用いられる。
【0069】
レチクルステージ120上には、所定のパターン(例えば、ラインパターン)がそのパ
ターン面(図10における下面)に形成されたレチクル(フォトマスク)Rが、例えば真
空吸着により固定保持されている。レチクルステージ120は、例えばリニアモータ等を
備えるレチクルステージ駆動装置121(図11を参照)によってXY平面内で移動可能
であるとともに、走査方向(ここではY軸方向とする)に所定の走査速度で移動可能に構
成されている。
【0070】
レチクルステージ120のXY平面内の位置情報(Z軸回りの回転方向の回転情報を含
む)は、レチクルステージ120に設けられたY軸に直交する反射面を有する第1反射鏡
123およびX軸に直交する反射面を有する第2反射鏡(図示せず)を介して、レチクル
干渉計125によって検出される。レチクル干渉計125により検出された当該位置情報
は主制御装置200に送られ、主制御装置200は、その位置情報に基づいてレチクルス
テージ駆動装置121を介してレチクルステージ120の位置(および移動速度)を制御
する。
【0071】
投影ユニット130は、レチクルステージ120の下方に配置され、鏡筒131と、鏡
筒131内に保持された投影光学系135とを有して構成される。投影光学系135は、
照明光の光軸AXに沿って配列された複数の光学素子(レンズエレメント)を有し、両側
テレセントリックで、所定の投影倍率(例えば1/4倍、1/5倍または1/8倍など)
を有するように構成されている。このため、照明系110から射出された照明光によって
レチクルR上の照明領域が照明されると、投影光学系135の物体面とパターン面が略一
致して配置されるレチクルRを透過した照明光により、投影光学系135を介してその照
明領域内のレチクルRのパターンの縮小像が、投影光学系135の像面側に配置されたウ
ェハ10上の露光領域(レチクルR上の照明領域に共役な領域)に形成される。そして、
レチクルステージ120とウェハ10を保持するステージ装置150との同期駆動によっ
て、照明領域に対してレチクルRを走査方向(Y軸方向)に移動させるとともに、露光領
域に対してウェハ10を走査方向(Y軸方向)に移動させることで、ウェハ10上の1つ
のショット領域の走査露光が行われ、そのショット領域にレチクルRのパターン(マスク
パターン)が転写される。
【0072】
露光装置101には、液浸方式の露光を行うために局所液浸装置140が設けられてい
る。局所液浸装置140は、図10および図11に示すように、液体供給装置141と、
液体回収装置142と、液体供給管143Aと、液体回収管143Bと、ノズルユニット
145とを有して構成される。ノズルユニット145は、投影光学系135を構成する最
も像面側(ウェハ側)の光学素子、ここでは先端レンズ136を保持する鏡筒131の下
端部周囲を取り囲むように、投影ユニット130を保持する不図示のフレーム部材(露光
装置101を構成するフレーム部材)に支持されている。また、ノズルユニット145は
、図10に示すように、その下端面が先端レンズ136の下端面と略同一面になるように
設定されている。
【0073】
液体供給装置141は、詳細な図示を省略するが、液体を貯蔵するタンクと、加圧ポン
プと、温度制御装置と、液体の流量を制御するためのバルブとを有して構成され、液体供
給管143Aを介してノズルユニット145に接続されている。液体回収装置142は、
詳細な図示を省略するが、回収した液体を貯蔵するタンクと、吸引ポンプと、液体の流量
を制御するためのバルブとを有して構成され、液体回収管143Bを介してノズルユニッ
ト145に接続されている。
【0074】
主制御装置200は、図11に示すように、液体供給装置141の作動を制御して液体
供給管143Aを介して先端レンズ136とウェハ10との間に液体(例えば、純水)を
供給するとともに、液体回収装置142の作動を制御して液体回収管143Bを介して先
端レンズ136とウェハ10との間から液体を回収する。このとき、主制御装置200は
、供給される液体の量と回収される液体の量とが常に等しくなるように、液体供給装置1
41および液体回収装置142の作動を制御する。したがって、先端レンズ136とウェ
ハ10との間には、一定量の液体が常に入れ替わって保持され、これにより液浸領域(液
浸空間)が形成される。このように、露光装置101では、照明光を、液浸領域を形成す
る液体を介してウェハ10に照射することによって、ウェハ10に対する露光が行われる
。
【0075】
ステージ装置150は、投影ユニット130の下方に配置されたウェハステージ151
と、ウェハステージ151を駆動するステージ駆動装置155(図11を参照)とを有し
て構成される。ウェハステージ151は、不図示のエアスライダにより数μm程度のクリ
アランスを有してベース部材105の上方に浮上支持され、ウェハステージ151の上面
においてウェハ10を真空吸着によって保持するように構成されている。そして、ウェハ
ステージ151は、ステージ駆動装置155を構成するモータにより、ベース部材105
の上面に沿ってXY平面内で移動可能になっている。
【0076】
ウェハステージ151のXY平面内の位置情報はエンコーダ装置156(図11を参照
)によって検出される。エンコーダ装置156により検出された当該位置情報は主制御装
置200に送られ、主制御装置200は、その位置情報に基づいてステージ駆動装置15
5を介してウェハステージ151の位置(および移動速度)を制御する。
【0077】
以上のように構成される露光装置101において、照明系110から射出された照明光
によってレチクルR上の照明領域が照明されると、投影光学系135の物体面とパターン
面が略一致して配置されるレチクルRを透過した照明光により、投影光学系135を介し
てその照明領域内のレチクルRのパターンの縮小像が、ウェハステージ151上に支持さ
れて投影光学系135の像面側に配置されたウェハ10上の露光領域(レチクルR上の照
明領域に共役な領域)に形成される。そして、レチクルステージ120とウェハ10を支
持するウェハステージ151との同期駆動によって、照明領域に対してレチクルRを走査
方向(Y軸方向)に移動させるとともに、露光領域に対してウェハ10を走査方向(Y軸
方向)に移動させることで、ウェハ10上の1つのショット領域の走査露光が行われ、そ
のショット領域にレチクルRのパターンが転写される。
【0078】
なおこのとき、例えば、X軸方向の端から奇数番目のショットの列において、照明領域
に対してレチクルRを−Y軸方向に移動させるとともに、露光領域に対してウェハ10を
−Y軸方向に移動させることで、端から奇数番目の列における各ショット領域に対して+
Y軸方向への走査露光が行われる。一方、X軸方向の端から偶数番目のショットの列にお
いて、照明領域に対してレチクルRを+Y軸方向に移動させるとともに、露光領域に対し
てウェハ10を+Y軸方向に移動させることで、端から偶数番目の列における各ショット
領域に対して−Y軸方向への走査露光が行われる。すなわち、ウェハ10に対して、一方
の走査方向もしくはこれとは逆の他方の走査方向で走査露光が行われる。
【0079】
このようにして露光装置101による露光工程が実施されると、現像装置(図示せず)
による現像工程等を経て、前述の実施形態に係る表面検査装置1により、表面に繰り返し
パターン12が形成されたウェハ10の表面検査を行う。なお、露光工程を実施する前、
表面検査装置1は、前述のようにして、走査方向による線幅の差を求め、接続ケーブル(
図示せず)等を介して、走査方向による線幅の差のデータを露光装置101に出力する。
そして、露光装置101の主制御装置200に設けられた補正処理部210は、表面検査
装置1から入力された走査方向による線幅の差に基づいて、走査方向によって線幅に差が
生じないように、露光装置101の各種設定パラメータを補正する。
【0080】
これにより、本実施形態の露光システム100によれば、前述の実施形態に係る表面検
査装置1から入力された走査方向による線幅の差に応じて、露光装置101の設定を補正
するため、走査方向の異なる露光ショットでパターン形状が変化することなく、露光装置
101の設定をより適切に行うことができる。
【符号の説明】
【0081】
1 表面検査装置 5 ステージ
10 ウェハ(10a ドーズ条件振りウェハ)
20 照明系(照明部)
30 受光系(検出部) 35 撮像装置(検出部)
40 画像処理部
42 検査部(演算部、評価部)
100 露光システム 101 露光装置
【技術分野】
【0001】
本発明は、露光装置により露光された基板の表面を検査する表面検査装置および表面検
査方法に関する。また、このような表面検査装置および露光装置を備えた露光システムに
関する。
【背景技術】
【0002】
ステップ・アンド・スキャン方式の露光装置は、マスクパターンおよび投影レンズを介
してスリット状の光を照射しながら、レチクルステージ(すなわち、マスクパターンが形
成されたマスク基板)を相対移動させて1ショット分だけ走査(=スキャン)することに
より、半導体ウェハに対して1ショット分の露光を行うようになっている。このようにす
れば、スリット(光)の長辺とレチクルステージの相対スキャン距離で露光ショットの大
きさが決まるため、露光ショットを大きくすることができる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−304054号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
このような露光装置では、作業時間を短縮する等の理由により、露光ショットによって
走査方向を逆にすることがある。しかしながら、一方の走査方向とこれとは逆の他方の走
査方向とでスキャン精度が異なるために、走査方向の異なる露光ショットでパターン形状
が変化する場合があり、このような走査方向の違いによって生じるスキャン精度の差異を
求めるための方策が望まれていた。
【0005】
本発明は、このような問題に鑑みてなされたものであり、露光時の走査方向の違いによ
って生じるスキャン精度の差異を求めることが可能な表面検査装置、表面検査方法、およ
び露光システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
このような目的達成のため、本発明に係る表面検査装置は、露光によって作製されたパ
ターンを有する基板を照明光で照明する照明部と、前記パターンで反射した照明光を検出
する検出部と、前記検出の結果から前記パターンが作製された際の露光量に関する情報を
演算する演算部と、前記露光量に関する情報のバラツキを求める評価部とを備えている。
【0007】
また、本発明に係る露光システムは、基板の表面に所定のパターンを走査露光する露光
装置と、走査露光されて表面に前記パターンが形成された基板の表面検査を行う表面検査
装置とを備え、前記表面検査装置は、本発明に係る表面検査装置であって、前記評価部に
より求められた情報を前記露光装置へ出力し、前記露光装置は、前記表面検査装置から入
力された前記評価部により求められた情報に応じて、前記露光装置の設定を補正するよう
になっている。
【0008】
また、本発明に係る表面検査方法は、露光によって作製されたパターンを有する基板を
照明光で照明し、前記パターンで反射した照明光を検出し、前記検出の結果から前記パタ
ーンが作製された際の露光量に関する情報を演算し、前記露光量に関する情報のバラツキ
を求めるようになっている。
【発明の効果】
【0009】
本発明によれば、露光時の走査方向の違いによって生じるスキャン精度の差異を求める
ことができる。
【図面の簡単な説明】
【0010】
【図1】表面検査装置の全体構成を示す図である。
【図2】表面検査装置の光路上に偏光フィルタが挿入された状態を示す図である。
【図3】半導体ウェハの表面の外観図である。
【図4】繰り返しパターンの凹凸構造を説明する斜視図である。
【図5】直線偏光の入射面と繰り返しパターンの繰り返し方向との傾き状態を説明する図である。
【図6】正方向で走査露光されるパターンの線幅と逆方向で走査露光されるパターンの線幅との差を求める方法を示すフローチャートである。
【図7】ドーズ条件振りウェハの一例を示す図である。
【図8】ドーズカーブの一例を示す図である。
【図9】ウェハの表面における線幅の分布を求める方法を示すフローチャートである。
【図10】露光システムの概要構成図である。
【図11】露光装置の制御ブロック図である。
【発明を実施するための形態】
【0011】
以下、図面を参照して本発明の好ましい実施形態について説明する。本実施形態の表面
検査装置を図1に示しており、この装置により基板である半導体ウェハ10(以下、ウェ
ハ10と称する)の表面を検査する。本実施形態の表面検査装置1は、図1に示すように
、略円盤形のウェハ10を支持するステージ5を備え、不図示の搬送装置によって搬送さ
れてくるウェハ10は、ステージ5の上に載置されるとともに真空吸着によって固定保持
される。ステージ5は、ウェハ10の回転対称軸(ステージ5の中心軸)を回転軸として
、ウェハ10を回転(ウェハ10の表面内での回転)可能に支持する。この回転によるウ
ェハの向きを、便宜的にウェハ方位角度と称することにする。また、ステージ5は、ウェ
ハ10を支持する支持面を通る軸を中心に、ウェハ10をチルト(傾動)させることが可
能であり、照明光の入射角を調整できるようになっている。
【0012】
表面検査装置1はさらに、ステージ5に支持されたウェハ10の表面全面に照明光を平
行光として照射する照明系20と、照明光の照射を受けたときのウェハ10の全面からの
反射光や回折光等を集光する受光系30と、受光系30により集光された光を受けてウェ
ハ10の表面の像を検出する撮像装置35と、画像処理部40と、検査部42と、記憶部
45とを備えて構成される。照明系20は、照明光を射出する照明ユニット21と、照明
ユニット21から射出された照明光をウェハ10の表面に向けて反射させる照明側凹面鏡
25とを有して構成される。照明ユニット21は、メタルハライドランプや水銀ランプ等
の光源部22と、光源部22からの光のうち所定の波長を有する光を抽出し強度を調節す
る調光部23と、調光部23からの光を照明光として照明側凹面鏡25へ導く導光ファイ
バ24とを有して構成される。
【0013】
そして、光源部22からの光は調光部23を通過し、所定の波長(例えば、248nm
の波長)を有する所定の強度の照明光が導光ファイバ24から照明側凹面鏡25へ射出さ
れ、導光ファイバ24から照明側凹面鏡25へ射出された照明光は、導光ファイバ24の
射出部が照明側凹面鏡25の焦点面に配置されているため、照明側凹面鏡25により平行
光束となってステージ5に保持されたウェハ10の表面に照射される。なお、ウェハ10
に対する照明光の入射角と出射角との関係は、ステージ5をチルト(傾動)させてウェハ
10の載置角度を変化させることにより調整可能である。
【0014】
なお、表面検査装置1は、主制御部50と、主制御部50に接続されたハードウェア制
御部55とをさらに備えており、主制御部50はハードウェア制御部55を介して光源部
22と調光部23を制御する。また、主制御部50は、撮像装置35から出力された画像
信号を受け、画像処理部40に送る。画像処理部40で処理された画像データは主制御部
50により検査部42に送られ検査が行われる。検査結果および画像データは主制御部5
0により記憶部45に送られ記憶される。
【0015】
また、導光ファイバ24と照明側凹面鏡25との間には、照明側偏光フィルタ26が光
路上へ挿抜可能に設けられており、図1に示すように、照明側偏光フィルタ26を光路上
から抜去した状態で回折光を利用した検査(以下、便宜的に回折検査と称する)が行われ
、図2に示すように、照明側偏光フィルタ26を光路上に挿入した状態で偏光(構造性複
屈折による偏光状態の変化)を利用した検査(以下、便宜的にPER検査と称する)が行
われるようになっている(照明側偏光フィルタ26の詳細については後述する)。
【0016】
ウェハ10の表面からの出射光(回折光もしくは反射光)は受光系30により集光され
る。受光系30は、ステージ5に対向して配設された受光側凹面鏡31を主体に構成され
、受光側凹面鏡31により集光された出射光(回折光もしくは反射光)は、撮像装置35
の撮像面上に達し、ウェハ10の像が結像される。
【0017】
また、受光側凹面鏡31と撮像装置35との間には、受光側偏光フィルタ32が光路上
へ挿抜可能に設けられており、図1に示すように、受光側偏光フィルタ32を光路上から
抜去した状態で回折検査が行われ、図2に示すように、受光側偏光フィルタ32を光路上
に挿入した状態でPER検査が行われるようになっている(受光側偏光フィルタ32の詳
細については後述する)。
【0018】
撮像装置35は、撮像面上に形成されたウェハ10の表面の像を光電変換して画像信号
(デジタル画像データ)を生成し、主制御部50を介して画像信号を画像処理部40に出
力する。画像処理部40は、撮像装置35から入力されたウェハ10の画像信号に基づい
て、ウェハ10のデジタル画像を生成する。記憶部45には、良品ウェハの画像データが
予め記憶されており、検査部42は、主制御部50からウェハ10の画像データと良品ウ
ェハの画像データとを受け取り比較して、ウェハ10の表面における欠陥(異常)の有無
を検査する。そして、検査部42による検査結果およびそのときのウェハ10の画像が図
示しない画像表示装置で出力表示される。また、検査部42は、ウェハの画像を利用して
露光装置101による露光時のドーズ量を求めることができる(詳細は後述する)。
【0019】
ところで、ウェハ10は、露光装置101により最上層のレジスト膜に対して所定のマ
スクパターンが投影露光され、現像装置(図示せず)による現像後、不図示の搬送装置に
より、不図示のウェハカセットまたは現像装置からステージ5上に搬送される。なおこの
とき、ウェハ10は、ウェハ10のパターンもしくは外縁部(ノッチやオリエンテーショ
ンフラット等)を基準としてアライメントが行われた状態で、ステージ5上に搬送される
。なお、ウェハ10の表面には、図3に示すように、複数のチップ領域11(ショット)
が縦横に(図3におけるXY方向に)配列され、各チップ領域11の中には、半導体パタ
ーンとしてラインパターンまたはホールパターン等の繰り返しパターン12が形成されて
いる。
【0020】
また、露光装置101は、前述のステップ・アンド・スキャン方式の露光装置であり、
例えば、X方向の左端から奇数番目のショットの列に対して、+Y方向(図3の下方から
上方)に走査露光を行うとともに、X方向の左端から偶数番目のショットの列に対して、
−Y方向(図3の上方から下方)に走査露光を行うようになっている。すなわち、露光装
置101により、ウェハ10に対して、一方の走査方向もしくはこれとは逆の他方の走査
方向で走査露光が行われる。なお、露光装置101は、ケーブル等を介して本実施形態の
表面検査装置1と電気的に接続されている。
【0021】
以上のように構成される表面検査装置1を用いて、ウェハ10表面の回折検査を行うに
は、まず、図1に示すように照明側偏光フィルタ26および受光側偏光フィルタ32を光
路上から抜去し、不図示の搬送装置により、ウェハ10をステージ5上に搬送する。なお
、搬送の途中で不図示のアライメント機構によりウェハ10の表面に形成されているパタ
ーンの位置情報を取得しており、ウェハ10をステージ5上の所定の位置に所定の方向で
載置することができる。
【0022】
次に、ウェハ10の表面上における照明方向とパターンの繰り返し方向とが一致(ライ
ンパターンの場合、ラインに対して直交)するようにステージ5を回転させるとともに、
パターンのピッチをPとし、ウェハ10の表面に照射する照明光の波長をλとし、照明光
の入射角をθ1とし、n次回折光の出射角をθ2としたとき、ホイヘンスの原理より、次
の(1)式を満足するように設定を行う(ステージ5をチルトさせる)。
【0023】
P=n×λ/{sin(θ1)−sin(θ2)} …(1)
【0024】
次に、照明系20により照明光をウェハ10の表面に照射する。このような条件で照明
光をウェハ10の表面に照射する際、照明ユニット21における光源部22からの光は調
光部23を通過し、所定の波長(例えば、248nmの波長)を有する所定の強度の照明
光が導光ファイバ24から照明側凹面鏡25へ射出され、照明側凹面鏡25で反射した照
明光が平行光束となってウェハ10の表面に照射される。ウェハ10の表面で回折した回
折光は、受光側凹面鏡31により集光されて撮像装置35の撮像面上に達し、ウェハ10
の像(回折像)が結像される。ウェハ方位角度、照明波長、照明角度、射出角度、回折次
数などの組み合わせで決まる回折光の条件を回折条件と称する。
【0025】
そこで、撮像装置35は、撮像面上に形成されたウェハ10の表面の像を光電変換して
画像信号を生成し、主制御部50を介して画像信号を画像処理部40に出力する。画像処
理部40は、撮像装置35から入力されたウェハ10の画像信号に基づいて、ウェハ10
のデジタル画像(以下、回折光に基づくウェハ10のデジタル画像を便宜的に回折画像と
称する)を生成する。また、画像処理部40は、ウェハ10の回折画像を生成すると主制
御部50を介して回折画像を検査部42へ送り、検査部42は、ウェハ10の画像データ
と良品ウェハの画像データとを比較して、ウェハ10の表面における欠陥(異常)の有無
を検査する。そして、検査部42による検査結果およびそのときのウェハ10の回折画像
が図示しない画像表示装置で出力表示される。
【0026】
次に、表面検査装置1によりウェハ10表面のPER検査を行う場合について説明する
。なお、繰り返しパターン12は、図4に示すように、複数のライン部2Aがその短手方
向(X方向)に沿って一定のピッチPで配列されたレジストパターン(ラインパターン)
であるものとする。また、隣り合うライン部2A同士の間は、スペース部2Bである。ま
た、ライン部2Aの配列方向(X方向)を「繰り返しパターン12の繰り返し方向」と称
することにする。
【0027】
ここで、繰り返しパターン12におけるライン部2Aの線幅DAの設計値をピッチPの
1/2とする。設計値の通りに繰り返しパターン12が形成された場合、ライン部2Aの
線幅DAとスペース部2Bの線幅DBは等しくなり、ライン部2Aとスペース部2Bとの体
積比は略1:1になる。これに対して、繰り返しパターン12を形成する際の露光フォー
カスが適正値から外れると、ピッチPは変わらないが、ライン部2Aの線幅DAが設計値
と異なってしまうとともに、スペース部2Bの線幅DBとも異なってしまい、ライン部2
Aとスペース部2Bとの体積比が略1:1から外れる。
【0028】
PER検査は、上記のような繰り返しパターン12におけるライン部2Aとスペース部
2Bとの体積比の変化を利用して、繰り返しパターン12の異常検査を行うものである。
なお、説明を簡単にするため、理想的な体積比(設計値)を1:1とする。体積比の変化
は、露光フォーカスの適正値からの外れに起因し、ウェハ10のショット領域ごとに現れ
る。なお、体積比を断面形状の面積比と言い換えることもできる。
【0029】
PER検査では、図2に示すように、照明側偏光フィルタ26および受光側偏光フィル
タ32が光路上に挿入される。また、PER検査を行うとき、ステージ5は、照明光が照
射されたウェハ10からの正反射光を受光系30で受光できる傾斜角度にウェハ10をチ
ルトさせるとともに、所定の回転位置で停止し、ウェハ10における繰り返しパターン1
2の繰り返し方向を、図5に示すように、ウェハ10の表面における照明光(直線偏光L
)の振動方向に対して、45度だけ斜めになるように保持する。繰り返しパターン12の
検査の光量を最も高くするためである。また、22.5度や67.5度とすれば検査の感
度が高くなる。なお、角度はこれらに限らず、任意角度方向に設定可能である。
【0030】
照明側偏光フィルタ26は、導光ファイバ24と照明側凹面鏡25との間に配設される
とともに、その透過軸が所定の方位に設定され、透過軸に応じて照明ユニット21からの
光から直線偏光を抽出する。このとき、導光ファイバ24の射出部が照明側凹面鏡25の
焦点位置に配置されているため、照明側凹面鏡25は、照明側偏光フィルタ26を透過し
た光を平行光束にして、基板であるウェハ10を照明する。このように、導光ファイバ2
4から射出された光は、照明側偏光フィルタ26および照明側凹面鏡25を介しp偏光の
直線偏光L(図5を参照)となり、照明光としてウェハ10の表面全体に照射される。
【0031】
このとき、直線偏光Lの進行方向(ウェハ10表面上の任意の点に到達する直線偏光L
の主光線の方向)は光軸に略平行であることから、ウェハ10の各点における直線偏光L
の入射角度は、平行光束のため互いに同じとなる。また、ウェハ10に入射する直線偏光
Lがp偏光であるため、図5に示すように、繰り返しパターン12の繰り返し方向が直線
偏光Lの入射面(ウェハ10の表面における直線偏光Lの進行方向)に対して45度の角
度に設定された場合、ウェハ10の表面における直線偏光Lの振動方向と繰り返しパター
ン12の繰り返し方向とのなす角度も、45度に設定される。言い換えると、直線偏光L
は、ウェハ10の表面における直線偏光Lの振動方向が繰り返しパターン12の繰り返し
方向に対して45度傾いた状態で、繰り返しパターン12を斜めに横切るようにして繰り
返しパターン12に入射することになる。
【0032】
ウェハ10の表面で反射した正反射光は、受光系30の受光側凹面鏡31により集光さ
れて撮像装置35の撮像面上に達するが、このとき、繰り返しパターン12での構造性複
屈折により直線偏光Lの偏光状態が変化する。受光側偏光フィルタ32は、受光側凹面鏡
31と撮像装置35との間に配設され、受光側偏光フィルタ32の透過軸の方位は、上述
した照明側偏光フィルタ26の透過軸に対して直交するように設定されている(クロスニ
コルの状態)。したがって、受光側偏光フィルタ32により、ウェハ10(繰り返しパタ
ーン12)からの正反射光のうち直線偏光Lと振動方向が略直角な偏光成分(例えば、s
偏光の成分)を通過させて、撮像装置35に導くことができる。その結果、撮像装置35
の撮像面には、ウェハ10からの正反射光のうち直線偏光Lに対して振動方向が略直角な
偏光成分によるウェハ10の反射像が形成される。なお、受光側偏光フィルタ32を光軸
を中心に回動可能とし、楕円偏光化した正反射光の短軸方向と受光側偏光フィルタ32の
透過軸を合わせるように調整することで、感度を向上させることができる。この場合も調
整角度は数度であり、直交の範疇である。
【0033】
表面検査装置1によりウェハ10表面のPER検査を行うには、まず、図2に示すよう
に照明側偏光フィルタ26および受光側偏光フィルタ32を光路上に挿入し、不図示の搬
送装置により、ウェハ10をステージ5上に搬送する。なお、搬送の途中で不図示のアラ
イメント機構によりウェハ10の表面に形成されているパターンの位置情報を取得してお
り、ウェハ10をステージ5上の所定の位置に所定の方向で載置することができる。また
このとき、ステージ5は、照明光が照射されたウェハ10からの正反射光を受光系30で
受光できる傾斜角度にウェハ10をチルトさせるとともに、所定の回転位置で停止し、ウ
ェハ10における繰り返しパターン12の繰り返し方向を、ウェハ10の表面における照
明光(直線偏光L)の振動方向に対して、45度だけ斜めになるように保持する。
【0034】
次に、照明系20により照明光をウェハ10の表面に照射する。このような条件で照明
光をウェハ10の表面に照射する際、照明ユニット21の導光ファイバ24から射出され
た光は、照明側偏光フィルタ26および照明側凹面鏡25を介しp偏光の直線偏光Lとな
り、照明光としてウェハ10の表面全体に照射される。ウェハ10の表面で反射した正反
射光は、受光側凹面鏡31により集光されて撮像装置35の撮像面上に達し、ウェハ10
の像(反射像)が結像される。
【0035】
このとき、繰り返しパターン12での構造性複屈折により直線偏光Lの偏光状態が変化
し、受光側偏光フィルタ32は、ウェハ10(繰り返しパターン12)からの正反射光の
うち直線偏光Lと振動方向が略直角な偏光成分を通過させて(すなわち、直線偏光Lの偏
光状態の変化を抽出して)、撮像装置35に導くことができる。その結果、撮像装置35
の撮像面には、ウェハ10からの正反射光のうち直線偏光Lと振動方向が略直角な偏光成
分によるウェハ10の反射像が形成される。
【0036】
そこで、撮像装置35は、撮像面上に形成されたウェハ10の表面の像(反射像)を光
電変換して画像信号(デジタル画像データ)を生成し、主制御部50を介して画像信号を
画像処理部40に出力する。画像処理部40は、撮像装置35から入力されたウェハ10
の画像信号に基づいて、ウェハ10のデジタル画像(以下、偏光に基づくウェハ10のデ
ジタル画像を便宜的に偏光画像と称する)を生成する。また、画像処理部40は、ウェハ
10の偏光画像を生成すると主制御部50を介して偏光画像を検査部42へ送り、検査部
42は、ウェハ10の画像データと良品ウェハの画像データとを比較して、ウェハ10の
表面における欠陥(異常)の有無を検査する。なお、良品ウェハの反射画像の信号強度(
輝度値)は、最も高い信号強度(輝度値)を示すものと考えられるため、例えば、良品ウ
ェハと比較した信号強度変化(輝度変化)が予め定められた閾値(許容値)より大きけれ
ば「異常」と判定し、閾値より小さければ「正常」と判断する。そして、検査部42によ
る検査結果およびそのときのウェハ10の偏光画像が図示しない画像表示装置で出力表示
される。
【0037】
なお、信号強度とは、回折効率、強度比、エネルギー比等、撮像装置35の撮像素子で
検出される光に応じた信号強度である。また、上述した回折検査およびPER検査に限ら
ず、ウェハ10表面からの正反射光に基づく検査(以下、便宜的に正反射検査と称する)
を行うことも可能である。正反射検査を行う場合、画像処理部40は、ウェハ10表面か
らの正反射光に基づくデジタル画像(以下、便宜的に正反射画像と称する)を生成し、生
成したウェハ10の正反射画像に基づいて、ウェハ10の表面における欠陥(異常)の有
無を検査する。
【0038】
また、検査部42は、ウェハ10の回折画像等から、露光装置101による露光時のド
ーズ量を求めることができる。なお、ドーズとは、パターンを形成する際のエネルギー量
である。さらに、繰り返しパターン12の線幅とドーズ量との関係を予めテンプレート化
することにより、検査部42は、求めたドーズ量から繰り返しパターン12の線幅を算出
することができる。そのため、検査部42は、ウェハ10の回折画像等から、露光装置1
01により一方の走査方向(以下、便宜的に正方向と称する)で走査露光される繰り返し
パターン12の線幅と、これとは逆の他方の走査方向(以下、便宜的に逆方向と称する)
で走査露光される繰り返しパターン12の線幅との差を求めることができる。
【0039】
正方向で走査露光される繰り返しパターン12の線幅と逆方向で走査露光される繰り返
しパターン12の線幅との差を求める方法について、図6に示すフローチャートを参照し
ながら説明する。まず、露光装置101のドーズ量を変化させて繰り返しパターンを形成
したウェハを作製する(ステップST101)。このとき、露光ショット毎にドーズ量を
ばらばらに変化させて露光し現像する。以下、このようなウェハをドーズ条件振りウェハ
10a(図7を参照)と称することにする。ここで、ドーズ量をばらばらにするのは、ウ
ェハの中央側と外周側の間に発生するレジスト条件の相違などの影響を相殺する目的で行
う。
【0040】
本実施形態のドーズ条件振りウェハ10aは、図7に示すように、ドーズ量を1.5m
J刻みで8段階(10.0mJ、11.5mJ、13.0mJ、14.5mJ、16.0
mJ、17.5mJ、19.0mJ、20.5mJ)に振っている。なお、図7の各ショ
ットには、1.5mJ刻みで振ったドーズオフセットの段階を示しており、段階が同じで
走査方向(スキャン方向)が逆方向の場合には「´」を付している。例えば、番号6で表
したショットは、同じドーズ量で行う露光を、レチクル移動Y+方向/中央側で2ショッ
ト・レチクル移動Y+方向/外周側で2ショット・レチクル移動Y−方向/中央側で2シ
ョット・レチクル移動Y−方向/外周側で2ショットのように8箇所設定している。また
例えば、番号1で表したショットは、同じドーズ量で行う露光を、条件振りウェハ10a
の中心を対称軸として、レチクル移動Y+方向/外周側で4ショット・レチクル移動Y−
方向/外周側で4ショットのように8箇所設定している。本実施形態では、このようにド
ーズオフセットを8段階、各ドーズ量で8ショットの合計64ショットでドーズ条件振り
ウェハ10aを作っている。なお、パターン露光に要する露光量は、パターンによって5
mJ〜40mJ程度であり、ドーズ条件振りウェハを作る際の振り幅は、0.5mJ〜2
.0mJとすることが望ましい。
【0041】
なお、ドーズ条件振りウェハを、複数枚にわたって作製するようにしてもよい。その場
合、各条件振りウェハのドーズ量毎のショット配置は、ドーズ量以外の条件による影響を
相殺するように設定することが好ましい。
【0042】
ドーズ条件振りウェハ10aを作製すると、回折検査の場合と同様にして、ドーズ条件
振りウェハ10aをステージ5上に搬送する(ステップST102)。次に、回折検査の
場合と同様に、照明系20が照明光をドーズ条件振りウェハ10aの表面に照射し、撮像
装置35がドーズ条件振りウェハ10aの像を光電変換して画像信号を生成し、主制御部
50を介して画像信号を画像処理部40に出力する(ステップST103)。このとき、
ドーズ条件振りウェハ10aについて、露光したパターンのピッチ情報または回折条件サ
ーチを利用して回折条件を求め、回折光が得られるように回折検査の場合と同様の設定を
行う。回折条件サーチとは、正反射以外の角度範囲でステージ5のチルト角度を段階的に
変化させてそれぞれのチルト角度で画像を取得し、画像が明るくなる、すなわち回折光が
得られるチルト角度を求める機能のことを指す。なお、ドーズ条件振りウェハ10aの方
位角(露光したパターンの照明光の照明方向に対する姿勢)は、露光したパターンの繰り
返し方向(ラインアンドスペースのパターンの場合ラインと直交する方向)と照明方向が
一致するように配置されている。
【0043】
次に、画像処理部40は、撮像装置35から入力されたドーズ条件振りウェハ10aの
画像信号に基づいて、ドーズ条件振りウェハ10aの回折画像(デジタル画像)を生成す
る。また、画像処理部40は、ドーズ条件振りウェハ10aの回折画像を生成すると主制
御部50を介して回折画像を検査部42へ送り、検査部42は、ドーズ量および走査方向
(スキャン方向)が同じショット毎に画素単位(それぞれのショットの対応する部分の画
素同士)で信号強度(輝度)の平均化を行う(ステップST104)。なお、回折検査で
欠陥と判断された部分については、前述の平均化の対象から除外する。
【0044】
このとき、検査部42は、平均化によって得られた(互いにドーズ量の異なる)走査方
向が正方向の全てのショットについて、図7に示すショット内に設定した複数の設定領域
(小さな長方形で囲んだ領域)Aでの信号強度の平均値(以下、便宜的に平均輝度と称す
る)をそれぞれ求める。またこのとき、検査部42は、平均化によって得られた(互いに
ドーズ量の異なる)走査方向が逆方向の全てのショットについて、複数の設定領域Aでの
平均輝度をそれぞれ求める。なお、ドーズ条件振りウェハ10aは、露光装置101のド
ーズ量をショット毎に変化させているため、ショットの位置からドーズ量を求めることが
でき、異なるドーズ量で露光されたそれぞれのショット内の同位置の設定領域Aにおいて
、ドーズ量に応じて平均輝度が変化することになる。
【0045】
そこで、検査部42は、平均輝度を求めた設定領域Aごとに、(互いにドーズ量の異な
る)走査方向が正方向の各ショットにおける同位置の設定領域Aでの平均輝度と、これに
対応するドーズ量との関係を示すグラフ(以下、ドーズカーブと称する)を求める。また
、検査部42は、平均輝度を求めた設定領域Aごとに、(互いにドーズ量の異なる)走査
方向が逆方向の各ショットにおける同位置の設定領域Aでの平均輝度と、これに対応する
ドーズ量との関係を示すグラフ、すなわちドーズカーブを求める(ステップST105)
。ここで、ドーズカーブの一例を図8に示す。なお、このステップで求めた走査方向が正
方向のショットにおけるドーズカーブを正方向基準ドーズカーブと称し、走査方向が逆方
向のショットにおけるドーズカーブを逆方向基準ドーズカーブと称する。
【0046】
次に、検査部42は、正方向基準ドーズカーブおよび逆方向基準ドーズカーブを関数で
近似した近似曲線を設定領域Aごとにそれぞれ求める(ステップST106)。なお、近
似曲線の関数には、4次関数(4次式)を用いるのが好ましい。また、4次関数は次の(
2)式のように表される。
【0047】
y=ax4+bx3+cx2+dx+e …(2)
【0048】
ここで、xはドーズ量であり、yは信号強度(平均輝度)であり、a,b,c,d,e
は係数である。最小二乗法などを用いて、ドーズカーブを近似するための最適な係数a,
b,c,d,eを求めることにより、(2)式の近似関数が得られる。
【0049】
次に、検査部42は、正方向基準ドーズカーブの近似曲線において設計値に対応した輝
度(信号強度)となるドーズ量と、逆方向基準ドーズカーブの近似曲線において設計値に
対応した輝度(信号強度)となるドーズ量をそれぞれ求める(ステップST107)。こ
のとき、設計値に対応した輝度(信号強度)となるドーズ量を設定領域Aごとに求める(
ステップST108)。このようにすれば、走査方向が正方向のショット内におけるドー
ズ量の分布と、走査方向が逆方向のショット内におけるドーズ量の分布をそれぞれ求める
ことができる。なお、ドーズカーブの近似曲線における設計値に対応した輝度(信号強度
)は、予め線幅が設計値と一致したパターンを用いて求めておく。
【0050】
前述したように、繰り返しパターン12の線幅とドーズ量との関係は、データマップ等
として予めテンプレート化され、記憶部45に記憶されている。検査部42は、記憶部4
5に記憶されたデータマップを用いて、走査方向が正方向のショット内におけるドーズ量
から、正方向で走査露光される繰り返しパターン12の線幅を設定領域Aごとに求める。
また、検査部42は、記憶部45に記憶されたデータマップを用いて、走査方向が逆方向
のショット内におけるドーズ量から、逆方向で走査露光される繰り返しパターン12の線
幅を設定領域Aごとに求める(ステップST109)。このとき、線幅が設定領域Aごと
に求められるので、走査方向が正方向のショット内における線幅の分布と、走査方向が逆
方向のショット内における線幅の分布をそれぞれ求めることができる。
【0051】
次に、検査部42は、正方向で走査露光される繰り返しパターン12の線幅と、逆方向
で走査露光される繰り返しパターン12の線幅との差を設定領域Aごとに求める(ステッ
プST110)。このとき、線幅の差が設定領域Aごとに求められるので、走査方向の違
いによるショット内での線幅の差の分布を求めることができる。このようにして求めた走
査方向の違いによる線幅の差は、例えば、露光装置101に合わせたパラメータに変換さ
れ、検査部42から信号出力部60を介して露光装置101に出力されて、露光装置10
1による露光に反映される。このとき例えば、走査方向が正方向のショット内における線
幅の分布と、走査方向が逆方向のショット内における線幅の分布のうち、線幅のバラツキ
(分散値)が小さい方に合わせるように露光装置101の調整が行われる。このように、
検査部42は、ドーズ量(露光量)および線幅の差を求める演算・評価機能を有している
。
【0052】
走査方向によって露光装置101のスキャン精度が異なる場合、露光装置101のレチ
クルステージ120とステージ装置150(図10を参照)の同期駆動精度が低いことが
考えられ、特に、走査露光(スキャン)を開始するとき、加速度が大きくなるので、走査
方向の違いによるスキャン精度の差異が生じやすい。走査方向の違いによるスキャン精度
の差異が生じると、フォーカスは変わらないが、1ショットあたりのドーズ量に差が生じ
るため、露光装置101に露光された繰り返しパターン12の線幅にも走査方向の違いに
よって差が生じることになる。
【0053】
このように、本実施形態の表面検査装置1によれば、一方の走査方向で走査露光される
繰り返しパターン12の線幅と、他方の走査方向で走査露光される繰り返しパターン12
の線幅との差(すなわち、走査方向の違いによる線幅のバラツキ)を求めることにより、
露光装置101における走査方向の違いによって生じるスキャン精度の差異を求めること
が可能になる。また、求めた線幅の差を露光装置101にフィードバックすることで、ウ
ェハ全面において露光・現像されたパターンの線幅を設計値通りにすることができる。
【0054】
また、ウェハの表面から生じた回折光による像を撮像するようにすれば、レジスト膜等
の膜厚変動による影響を受けにくいため、露光時のドーズ量(すなわち、繰り返しパター
ン12の線幅)を精度よく計測することが可能である。特に、照明光の波長は、248n
mや313nm(j線)等の深紫外域の波長が望ましい。また、複数の回折条件を用いて
露光時のドーズ量を求めるようにすれば、例えば、各回折条件について平均化することに
より、さらなる精度向上が期待できる。また、対象となる様々なパターンごとに最適な回
折条件を選択することで、感度の高い、高精度な計測が可能になる。
【0055】
なお、検査部42は、露光装置101のドーズ量をウェハごとに変化させて露光し現像
した複数のウェハの画像を利用して、ウェハ10の表面全体に対するドーズの変動状態を
求めることもできる。前述したように、検査部42は、ドーズ量から繰り返しパターン1
2の線幅を算出することができるので、ウェハ10の表面全体に対するドーズの変動状態
から、ウェハ10の表面における線幅の分布を求めることができる。そこで、ウェハ10
の表面における線幅の分布を求める方法について、図9に示すフローチャートを参照しな
がら説明する。まず、露光装置101のドーズ量をウェハごとに変化させて露光し現像し
た複数のウェハ(ドーズ量が10.0mJ、11.5mJ、13.0mJ、14.5mJ
、16.0mJ、17.5mJ、19.0mJ、20.5mJである8つのウェハ)の画
像を取得する(ステップST201)。このとき、ウェハの照明および撮像等は、回折検
査の場合と同様(最適なドーズ量と最適なフォーカス条件で露光・現像されたパターンか
ら所定の信号強度が得られる条件)にして行う。ここで、ドーズ量が異なる複数のウェハ
を計測用ウェハと称することにする。
【0056】
次に、検査部42は、取得したウェハの画像から、露光装置101のドーズ量を変化さ
せた計測用ウェハごとに、信号強度を画素単位(または少数の画素で形成される設定領域
の平均値、以下同じ)で求める(ステップST202)。画素単位であっても、少数の画
素で形成される設定領域であっても、便宜上設定領域Aと称し、その信号強度(または平
均値)を平均輝度と称することにする。次に、検査部42は、ショットの設定領域Aごと
に、(互いにフォーカスオフセット量の異なる)各ウェハにおける同位置の設定領域Aで
の平均輝度と、これに対応するドーズ量との関係を示すグラフ、すなわちドーズカーブ(
ドーズ条件振りウェハ10aで求めた基準となるドーズカーブと区別するため、以降適宜
サンプルドーズカーブと称する)を求める(ステップST203)。なお、サンプルドー
ズカーブを近似する際も近似曲線として4次関数を用いることが好ましい(ステップST
204)。このとき、露光装置101のドーズオフセットを計測用ウェハごとに変化させ
ているため、計測用ウェハの種類からドーズ量を求めることができ、ショット内の同位置
の設定領域Aにおいて、ドーズ量に応じて平均輝度が変化することになる。
【0057】
次に、検査部42は、求めたサンプルドーズカーブを利用して、全てのショットの設定
領域Aについて、各設定領域Aのサンプルドーズカーブに対応するドーズのずれ量をそれ
ぞれ求める(ステップST205)。具体的には、図示しないメモリに記憶された、各設
定領域Aのサンプルドーズカーブと、対応する設定領域Aの正方向基準ドーズカーブもし
くは逆方向基準ドーズカーブとの相関が最も良くなるようにフィッティング(いわゆるパ
ターンマッチング)を行う。このとき、ドーズ量の増減方向への移動量が即ちその設定領
域Aのドーズのずれ量となる。なお、各ショットの走査方向に応じて、正方向基準ドーズ
カーブもしくは逆方向基準ドーズカーブが選択される。
【0058】
このようにすれば、ウェハ表面上でのドーズのずれ量の分布を求めることができるため
、ウェハの表面全体に対するドーズの変動状態を求めることが可能になる。そして、検査
部42は、記憶部45に記憶されたデータマップを用いて、各設定領域Aにおけるドーズ
のずれ量から、繰り返しパターン12の線幅を設定領域Aごとに求める(ステップST2
06)。このとき、線幅が設定領域Aごとに求められるので、ウェハの表面における線幅
の分布を求めることができる。すなわち、ウェハ表面上での、走査方向が正方向のショッ
ト内における線幅の分布と、走査方向が逆方向のショット内における線幅の分布をそれぞ
れ求めることができ、検査部42は、ウェハの表面における走査方向の違いによる線幅の
バラツキを求めることが可能である。このとき例えば、走査方向が正方向の或る1つのシ
ョットと、走査方向が逆方向の各ショットとの線幅の差をそれぞれ求めることができる。
また例えば、走査方向が正方向のショットと、これに隣接する走査方向が逆方向のショッ
トとの線幅の差をそれぞれ求めることができる。さらに、検査部42は、走査方向の違い
による線幅のバラツキ(線幅の差)を、例えば、露光装置101に合わせたパラメータに
変換し、信号出力部60を介して露光装置101に出力することも可能である。
【0059】
なお、走査方向が全て正方向である計測用ウェハと、走査方向が全て逆方向である計測
用ウェハを用いて、各ウェハの表面における線幅の分布を求め、ウェハの表面全体での線
幅の差を求めるようにしてもよい。
【0060】
また、検査部42で求められた繰り返しパターン12の線幅から、繰り返しパターン1
2における異常の有無を検査するようにすれば、繰り返しパターン12の線幅を基準とす
るため検査の基準が明確となり、繰り返しパターン12の異常の有無を精度よく検査する
ことができる。このとき例えば、検査部42は、求めた繰り返しパターン12の線幅が所
定の範囲内であれば正常と判定し、所定の範囲から外れた場合に異常と判定することがで
きる。
【0061】
なお、上述の実施形態において、一方の走査方向で走査露光される繰り返しパターン1
2の線幅と、他方の走査方向で走査露光される繰り返しパターン12の線幅との差を求め
ているが、これに限られるものではない。例えば、一方の走査方向で走査露光されたショ
ットに対するドーズ量(露光量)と、他方の走査方向で走査露光されたショットに対する
ドーズ量との走査方向による差を求めるようにしてもよい。このようにしても、露光装置
101における走査方向の違いによって生じるスキャン精度の差異を求めることが可能で
ある。また、求めたドーズ量の差を露光装置101にフィードバックすることで、ウェハ
全面において露光・現像されたパターンの線幅を設計値通りにすることができる。なおこ
の場合、一方の走査方向で走査露光されたショットに対するドーズ量の分布と、他方の走
査方向で走査露光されたショットに対するドーズ量の分布のうち、ドーズ量のバラツキ(
分散値)が小さい方に合わせるように露光装置101の調整が行われる。
【0062】
また、スキャン精度に限らず、ミックスアンドマッチのように分割露光する場合には、
それぞれの分割領域のドーズ量(露光量)を求めることができる。そのため、ドーズ量が
適正量からずれている場合に、各分割領域のドーズ量をそれぞれ調整することが可能であ
る。
【0063】
また、上述の実施形態において、ドーズカーブの近似曲線の式として4次式を用いるの
が好ましいとしたが、グラフの形状によっては、直線近似を行うようにしてもよい。
【0064】
また、上述の実施形態において、回折検査と同様な手法により走査方向による線幅の差
を求める技術を説明したが、PER検査(偏光検査)と同様な手法によっても走査方向に
よる線幅の差を求めることができる。
【0065】
例えば、図6に示すフローチャートのステップST103において、照明系20が照明
光として直線偏光Lをドーズ条件振りウェハ10aの表面に照射し、撮像装置35がドー
ズ条件振りウェハ10aの反射像を光電変換して画像信号を生成し、主制御部50を介し
て画像信号を画像処理部40に出力すればよい。これにより、検査部42は、ドーズ条件
振りウェハ10aの偏光画像を利用して、偏光によるドーズカーブを求めることができる
。検査部42は、このドーズカーブを利用して、偏光の輝度(信号強度)が設計値に対応
する値となるドーズ量を求め、求めたドーズ量から繰り返しパターン12の線幅を算出す
るようにすれば、回折光の場合と同様に、正方向で走査露光される繰り返しパターン12
の線幅と、逆方向で走査露光される繰り返しパターン12の線幅との差を求めることがで
きる。
【0066】
また、上述の実施形態において、検査部42で求められた走査方向による線幅の差を、
検査部42から信号出力部60を介して露光装置101に出力して、露光装置101の設
定にフィードバックすることができる。そこで、前述の表面検査装置1を備えた露光シス
テムについて、図10および図11を参照しながら説明する。この露光システム100は
、レジストが塗布されたウェハ10の表面に所定のマスクパターン(繰り返しパターン)
を投影露光する露光装置101と、露光装置101による露光工程および現像装置(図示
せず)による現像工程等を経て、表面に繰り返しパターン12が形成されたウェハ10の
検査を行う表面検査装置1とを備えて構成される。
【0067】
露光装置101は、図10に示すように、照明系110と、レチクルステージ120と
、投影ユニット130と、局所液浸装置140と、ステージ装置150と、主制御装置2
00(図11を参照)とを備えて構成される。なお、以下においては、図10に示した矢
印X,Y,Zの方向をそれぞれX軸方向、Y軸方向、Z軸方向として説明する。
【0068】
照明系110は、詳細な図示を省略するが、光源と、オプティカルインテグレータ等を
備えた照度均一化光学系と、レチクルブラインド等を備えた照明光学系とを有し、レチク
ルブラインドで規定されたレチクルR上のスリット状の照明領域を照明光(露光光)によ
り略均一な照度で照明するように構成されている。照明光としては、例えば、ArFエキ
シマレーザ光(波長193nm)が用いられる。
【0069】
レチクルステージ120上には、所定のパターン(例えば、ラインパターン)がそのパ
ターン面(図10における下面)に形成されたレチクル(フォトマスク)Rが、例えば真
空吸着により固定保持されている。レチクルステージ120は、例えばリニアモータ等を
備えるレチクルステージ駆動装置121(図11を参照)によってXY平面内で移動可能
であるとともに、走査方向(ここではY軸方向とする)に所定の走査速度で移動可能に構
成されている。
【0070】
レチクルステージ120のXY平面内の位置情報(Z軸回りの回転方向の回転情報を含
む)は、レチクルステージ120に設けられたY軸に直交する反射面を有する第1反射鏡
123およびX軸に直交する反射面を有する第2反射鏡(図示せず)を介して、レチクル
干渉計125によって検出される。レチクル干渉計125により検出された当該位置情報
は主制御装置200に送られ、主制御装置200は、その位置情報に基づいてレチクルス
テージ駆動装置121を介してレチクルステージ120の位置(および移動速度)を制御
する。
【0071】
投影ユニット130は、レチクルステージ120の下方に配置され、鏡筒131と、鏡
筒131内に保持された投影光学系135とを有して構成される。投影光学系135は、
照明光の光軸AXに沿って配列された複数の光学素子(レンズエレメント)を有し、両側
テレセントリックで、所定の投影倍率(例えば1/4倍、1/5倍または1/8倍など)
を有するように構成されている。このため、照明系110から射出された照明光によって
レチクルR上の照明領域が照明されると、投影光学系135の物体面とパターン面が略一
致して配置されるレチクルRを透過した照明光により、投影光学系135を介してその照
明領域内のレチクルRのパターンの縮小像が、投影光学系135の像面側に配置されたウ
ェハ10上の露光領域(レチクルR上の照明領域に共役な領域)に形成される。そして、
レチクルステージ120とウェハ10を保持するステージ装置150との同期駆動によっ
て、照明領域に対してレチクルRを走査方向(Y軸方向)に移動させるとともに、露光領
域に対してウェハ10を走査方向(Y軸方向)に移動させることで、ウェハ10上の1つ
のショット領域の走査露光が行われ、そのショット領域にレチクルRのパターン(マスク
パターン)が転写される。
【0072】
露光装置101には、液浸方式の露光を行うために局所液浸装置140が設けられてい
る。局所液浸装置140は、図10および図11に示すように、液体供給装置141と、
液体回収装置142と、液体供給管143Aと、液体回収管143Bと、ノズルユニット
145とを有して構成される。ノズルユニット145は、投影光学系135を構成する最
も像面側(ウェハ側)の光学素子、ここでは先端レンズ136を保持する鏡筒131の下
端部周囲を取り囲むように、投影ユニット130を保持する不図示のフレーム部材(露光
装置101を構成するフレーム部材)に支持されている。また、ノズルユニット145は
、図10に示すように、その下端面が先端レンズ136の下端面と略同一面になるように
設定されている。
【0073】
液体供給装置141は、詳細な図示を省略するが、液体を貯蔵するタンクと、加圧ポン
プと、温度制御装置と、液体の流量を制御するためのバルブとを有して構成され、液体供
給管143Aを介してノズルユニット145に接続されている。液体回収装置142は、
詳細な図示を省略するが、回収した液体を貯蔵するタンクと、吸引ポンプと、液体の流量
を制御するためのバルブとを有して構成され、液体回収管143Bを介してノズルユニッ
ト145に接続されている。
【0074】
主制御装置200は、図11に示すように、液体供給装置141の作動を制御して液体
供給管143Aを介して先端レンズ136とウェハ10との間に液体(例えば、純水)を
供給するとともに、液体回収装置142の作動を制御して液体回収管143Bを介して先
端レンズ136とウェハ10との間から液体を回収する。このとき、主制御装置200は
、供給される液体の量と回収される液体の量とが常に等しくなるように、液体供給装置1
41および液体回収装置142の作動を制御する。したがって、先端レンズ136とウェ
ハ10との間には、一定量の液体が常に入れ替わって保持され、これにより液浸領域(液
浸空間)が形成される。このように、露光装置101では、照明光を、液浸領域を形成す
る液体を介してウェハ10に照射することによって、ウェハ10に対する露光が行われる
。
【0075】
ステージ装置150は、投影ユニット130の下方に配置されたウェハステージ151
と、ウェハステージ151を駆動するステージ駆動装置155(図11を参照)とを有し
て構成される。ウェハステージ151は、不図示のエアスライダにより数μm程度のクリ
アランスを有してベース部材105の上方に浮上支持され、ウェハステージ151の上面
においてウェハ10を真空吸着によって保持するように構成されている。そして、ウェハ
ステージ151は、ステージ駆動装置155を構成するモータにより、ベース部材105
の上面に沿ってXY平面内で移動可能になっている。
【0076】
ウェハステージ151のXY平面内の位置情報はエンコーダ装置156(図11を参照
)によって検出される。エンコーダ装置156により検出された当該位置情報は主制御装
置200に送られ、主制御装置200は、その位置情報に基づいてステージ駆動装置15
5を介してウェハステージ151の位置(および移動速度)を制御する。
【0077】
以上のように構成される露光装置101において、照明系110から射出された照明光
によってレチクルR上の照明領域が照明されると、投影光学系135の物体面とパターン
面が略一致して配置されるレチクルRを透過した照明光により、投影光学系135を介し
てその照明領域内のレチクルRのパターンの縮小像が、ウェハステージ151上に支持さ
れて投影光学系135の像面側に配置されたウェハ10上の露光領域(レチクルR上の照
明領域に共役な領域)に形成される。そして、レチクルステージ120とウェハ10を支
持するウェハステージ151との同期駆動によって、照明領域に対してレチクルRを走査
方向(Y軸方向)に移動させるとともに、露光領域に対してウェハ10を走査方向(Y軸
方向)に移動させることで、ウェハ10上の1つのショット領域の走査露光が行われ、そ
のショット領域にレチクルRのパターンが転写される。
【0078】
なおこのとき、例えば、X軸方向の端から奇数番目のショットの列において、照明領域
に対してレチクルRを−Y軸方向に移動させるとともに、露光領域に対してウェハ10を
−Y軸方向に移動させることで、端から奇数番目の列における各ショット領域に対して+
Y軸方向への走査露光が行われる。一方、X軸方向の端から偶数番目のショットの列にお
いて、照明領域に対してレチクルRを+Y軸方向に移動させるとともに、露光領域に対し
てウェハ10を+Y軸方向に移動させることで、端から偶数番目の列における各ショット
領域に対して−Y軸方向への走査露光が行われる。すなわち、ウェハ10に対して、一方
の走査方向もしくはこれとは逆の他方の走査方向で走査露光が行われる。
【0079】
このようにして露光装置101による露光工程が実施されると、現像装置(図示せず)
による現像工程等を経て、前述の実施形態に係る表面検査装置1により、表面に繰り返し
パターン12が形成されたウェハ10の表面検査を行う。なお、露光工程を実施する前、
表面検査装置1は、前述のようにして、走査方向による線幅の差を求め、接続ケーブル(
図示せず)等を介して、走査方向による線幅の差のデータを露光装置101に出力する。
そして、露光装置101の主制御装置200に設けられた補正処理部210は、表面検査
装置1から入力された走査方向による線幅の差に基づいて、走査方向によって線幅に差が
生じないように、露光装置101の各種設定パラメータを補正する。
【0080】
これにより、本実施形態の露光システム100によれば、前述の実施形態に係る表面検
査装置1から入力された走査方向による線幅の差に応じて、露光装置101の設定を補正
するため、走査方向の異なる露光ショットでパターン形状が変化することなく、露光装置
101の設定をより適切に行うことができる。
【符号の説明】
【0081】
1 表面検査装置 5 ステージ
10 ウェハ(10a ドーズ条件振りウェハ)
20 照明系(照明部)
30 受光系(検出部) 35 撮像装置(検出部)
40 画像処理部
42 検査部(演算部、評価部)
100 露光システム 101 露光装置
【特許請求の範囲】
【請求項1】
露光によって作製されたパターンを有する基板を照明光で照明する照明部と、
前記パターンで反射した照明光を検出する検出部と、
前記検出の結果から前記パターンが作製された際の露光量に関する情報を演算する演算
部と、
前記露光量に関する情報のバラツキを求める評価部とを備えることを特徴とする表面検
査装置。
【請求項2】
前記パターンは基板の走査中に露光して作製され、前記評価部は前記走査のバラツキを
求めることを特徴とする請求項1に記載の表面検査装置。
【請求項3】
前記基板上には、該基板を一方に走査しながら露光したパターンと、該基板を前記一方
とは反対の他方に走査しながら露光したパターンが作製されており、
前記評価部は、前記一方の走査と前記他方の走査との違いを求めることを特徴とする請
求項1または2に記載の表面検査装置。
【請求項4】
基板の表面に所定のパターンを走査露光する露光装置と、走査露光されて表面に前記パ
ターンが形成された基板の表面検査を行う表面検査装置とを備え、
前記表面検査装置は、請求項1から3のいずれか一項に記載の表面検査装置であって、
前記評価部により求められた情報を前記露光装置へ出力し、
前記露光装置は、前記表面検査装置から入力された前記評価部により求められた情報に
応じて、前記露光装置の設定を補正することを特徴とする露光システム。
【請求項5】
露光によって作製されたパターンを有する基板を照明光で照明し、
前記パターンで反射した照明光を検出し、
前記検出の結果から前記パターンが作製された際の露光量に関する情報を演算し、
前記露光量に関する情報のバラツキを求めることを特徴とする表面検査方法。
【請求項6】
前記パターンは基板の走査中に露光して作製されており、前記走査のバラツキを求める
ことを特徴とする請求項5に記載の表面検査方法。
【請求項7】
前記基板上には、該基板を一方に走査しながら露光したパターンと、該基板を前記一方
とは反対の他方に走査しながら露光したパターンが作製されており、
前記一方の走査と前記他方の走査との違いを求めることを特徴とする請求項5または6
に記載の表面検査方法。
【請求項1】
露光によって作製されたパターンを有する基板を照明光で照明する照明部と、
前記パターンで反射した照明光を検出する検出部と、
前記検出の結果から前記パターンが作製された際の露光量に関する情報を演算する演算
部と、
前記露光量に関する情報のバラツキを求める評価部とを備えることを特徴とする表面検
査装置。
【請求項2】
前記パターンは基板の走査中に露光して作製され、前記評価部は前記走査のバラツキを
求めることを特徴とする請求項1に記載の表面検査装置。
【請求項3】
前記基板上には、該基板を一方に走査しながら露光したパターンと、該基板を前記一方
とは反対の他方に走査しながら露光したパターンが作製されており、
前記評価部は、前記一方の走査と前記他方の走査との違いを求めることを特徴とする請
求項1または2に記載の表面検査装置。
【請求項4】
基板の表面に所定のパターンを走査露光する露光装置と、走査露光されて表面に前記パ
ターンが形成された基板の表面検査を行う表面検査装置とを備え、
前記表面検査装置は、請求項1から3のいずれか一項に記載の表面検査装置であって、
前記評価部により求められた情報を前記露光装置へ出力し、
前記露光装置は、前記表面検査装置から入力された前記評価部により求められた情報に
応じて、前記露光装置の設定を補正することを特徴とする露光システム。
【請求項5】
露光によって作製されたパターンを有する基板を照明光で照明し、
前記パターンで反射した照明光を検出し、
前記検出の結果から前記パターンが作製された際の露光量に関する情報を演算し、
前記露光量に関する情報のバラツキを求めることを特徴とする表面検査方法。
【請求項6】
前記パターンは基板の走査中に露光して作製されており、前記走査のバラツキを求める
ことを特徴とする請求項5に記載の表面検査方法。
【請求項7】
前記基板上には、該基板を一方に走査しながら露光したパターンと、該基板を前記一方
とは反対の他方に走査しながら露光したパターンが作製されており、
前記一方の走査と前記他方の走査との違いを求めることを特徴とする請求項5または6
に記載の表面検査方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2013−108779(P2013−108779A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2011−252294(P2011−252294)
【出願日】平成23年11月18日(2011.11.18)
【出願人】(000004112)株式会社ニコン (12,601)
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成23年11月18日(2011.11.18)
【出願人】(000004112)株式会社ニコン (12,601)
【Fターム(参考)】
[ Back to top ]