
表面検査装置及び表面検査方法
【課題】表面検査における検出感度の低下、及び熱ダメージの増加を抑制しつつ、検査時間を短縮することができる表面検査装置及び表面検査方法を提供する。
【解決手段】被検査物を主走査として回転移動させると共に副走査として並進移動させ、半導体ウエハ100の表面に照明光21を照射して、その照明光21の照射範囲である照明スポット3を形成し、照明スポットからの散乱・回折・反射光を検出し、その検出結果に基づいて半導体ウエハ100の表面上または表面近傍内部に存在する異物を検出する表面検査装置において、副走査の並進移動速度を、半導体ウエハ100の主走査における回転中心から照明スポットまでの距離に応じて制御する。
【解決手段】被検査物を主走査として回転移動させると共に副走査として並進移動させ、半導体ウエハ100の表面に照明光21を照射して、その照明光21の照射範囲である照明スポット3を形成し、照明スポットからの散乱・回折・反射光を検出し、その検出結果に基づいて半導体ウエハ100の表面上または表面近傍内部に存在する異物を検出する表面検査装置において、副走査の並進移動速度を、半導体ウエハ100の主走査における回転中心から照明スポットまでの距離に応じて制御する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、半導体基板や薄膜基板等の表面に存在する異物、きず、欠陥、汚れ等(以下、これらを総称して異物と記載する)を検出する検査装置及び検査方法に関する。
【背景技術】
【0002】
半導体基板や薄膜基板等(以下、これらを総称して被検査物と称する)の製造工程においては、被検査物の表面上の異物、傷、欠陥、汚れ等(以下、これらを総称して異物と称する)を検出し、管理することにより、製造装置の発塵状況や工程の清浄度などを監視し、製品の品質や歩留りの低下を抑制することが重要である。
【0003】
そのような被検査物の表面における異物を検出する装置としては、例えば、特許文献1及び2に記載されているように、被検査物の表面に検査光を固定照射し、披検査物を回転移動しながら並進移動することによって、照明光により照明された領域(以下、照明スポットと称する)で被検査物の表面を螺旋状に走査し(このとき、被検査物の回転方向の走査を主走査、その主走査に対して直交する方向の走査を副走査と呼ぶ)、被検査基板の表面で発生した散乱光を検出することにより、被検査物の表面上または表面近傍内部に存在する異物を検出する表面検査装置が開示されている。
【0004】
また、特許文献3には、照明スポットの被検査物における主走査方向の径を可変とし、照明スポットが被検査物の回転中心に近いほど、その主走査方向の径を大きく、回転中心から遠ざかるほど小さくなるように変化させることにより、被検査物における表面温度上昇および異物・欠陥の検出感度を検査中概略一定に保つようにしたものが開示されている。また、特許文献4及び5には、被検査物の表面に固定径の照明スポットを複数形成し、それら複数の照明スポットからの散乱光を検出する技術が開示されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2007−309713号公報
【特許文献2】特開2008−32582号公報
【特許文献3】米国特許出願公開第2006/0256325号明細書
【特許文献4】特開2008−8803号公報
【特許文献5】特開2008−20359号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
近年、半導体基板や薄膜基板等(被検査物)の表面検査において、検出が要求される異物のサイズが急速に小さくなってきており、また、これら被検査物の面積は増大傾向にあるので、被検査物を検査するのに必要な検査時間の増大が懸念されている。
【0007】
表面検査に要する時間を短縮する方法としては、例えは、回転数を増加させる方法が考えられるが、被検査物の強度や設置装置への固定強度の観点から設定される上限の回転速度で動作させている場合が多く、したがって、さらなる回転速度の高速化は期待できない。
【0008】
また、その他の方法として、例えば、照明スポットの照度を保ったまま、照明スポットの副走査方向の径を大きくすると共に、それに対応して副走査方向の送りピッチを大きくし、被検査物が1回転する間に照明スポットにより走査する面積を増加させることにより、検査時間の短縮を図ることが考えられる。
【0009】
しかしながら、照明スポットの照度を保ったまま、副走査方向の径を大きくすると、被検査物表面の微小ラフネスから生じる背景散乱光が増大して、異物の検出感度が低下してしまう。また、照明スポットの照度を増やせば、検出感度の低下はある程度抑制できるが、被検査物への熱ダメージが増大してしまう。
【0010】
本発明は上記に鑑みてなされたものであり、表面検査における検出感度の低下、及び熱ダメージの増加を抑制しつつ、検査時間を短縮することができる表面検査装置及び表面検査方法を提供することを目的とする。
【課題を解決するための手段】
【0011】
上記目的を達成するために、本発明は、被検査物を主走査として回転移動させ、副走査として並進移動させる披検査物移動手段と、前記被検査物の表面に照明光を照射して、その照明光の照射範囲である照明スポットを形成する照明光照射手段と、前記照明スポットからの散乱・回折・反射光を検出する光検出手段と、前記光検出手段からの検出結果に基づいて前記被検査物の表面上または表面近傍内部に存在する異物を検出する異物検出手段とを備え、前記被検査物移動手段における副走査の並進移動速度を、前記被検査物の主走査における回転中心から前記照明スポットまでの距離に応じて制御するものとする。
【発明の効果】
【0012】
本発明においては、表面検査における検出感度の低下、及び熱ダメージの増加を抑制しつつ、検査時間を短縮することができる。
【図面の簡単な説明】
【0013】
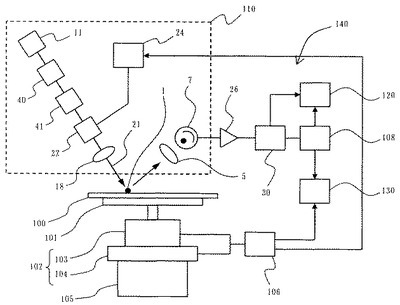
【図1】本発明の第1の実施の形態に係る表面検査装置の全体構成を示す概略図である。
【図2】本発明の第1の実施の形態の被検査物表面における照明スポット位置と角速度、及び送りピッチの関係の一例を示す図である。
【図3】本発明の第1の実施の形態の被検査物表面における照明スポット位置と角速度、及び送りピッチの関係のその他の例を示す図である。
【図4】本発明の第2の実施の形態に係る表面検査装置の全体構成を示す概略図である。
【図5】本発明の第2の実施の形態の被検査物表面における照明スポット位置と角速度、及び送りピッチの関係の一例を示す図である。
【図6】本発明の第3の実施の形態に係る表面検査装置の全体構成を示す概略図である。
【図7】本発明の第3の実施の形態の被検査物表面における照明スポットを示す図である。
【図8】本発明の第4の実施の形態に係る表面検査装置の全体構成を示す概略図である。
【発明を実施するための形態】
【0014】
以下、本発明の実施の形態を図面を参照しつつ説明する。
【0015】
<第1の実施の形態>
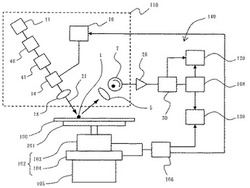
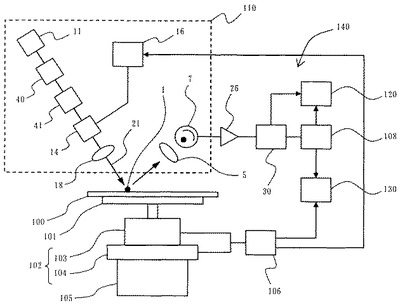
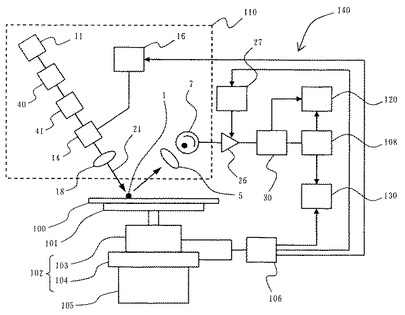
図1は、本発明の第1の実施の形態に係る表面検査装置の全体構成を示す概略図である。
【0016】
図1において、本実施の形態の表面検査装置は、被検査物の一例である半導体ウエハ100と、半導体ウエハ100を真空吸着するチャック101と、チャック101を半導体ウエハ100と共に回転移動する回転ステージ103及び並進移動する並進ステージ104とから成る被検査物移動ステージ102と、真空チャック101及び被検査物移動ステージ102を垂直方向に移動することにより半導体ウエハ100を垂直方向に移動するZステージ105と、半導体ウエハ100の上方に配置され、その半導体ウエハ100の表面に照明光21を照射し、半導体ウエハ100の表面からの散乱・回折・反射光を検出する照明・検出光学系110と、被検査物移動ステージ102及び照明・検出光学系110の照明・検出動作を制御する照明・検出制御系140とを備えている。
【0017】
半導体ウエハ100の表面に照明光21を照射し、被検査物移動ステージ102により半導体ウエハ100を回転移動及び並進移動させることにより、半導体ウエハ100の表面を照明光21により走査する。このとき、回転ステージ103が半導体100を回転移動させることにより行われる走査、すなわち回転方向に沿う方向の走査を主走査、並進ステージ104が半導体100を並進移動することにより行われる走査、すなわち主走査に直行する方向の走査を副走査と呼ぶ。
【0018】
照明・検出光学系110は、レーザ光を生成し射出する光源11と、光源11から射出されたレーザ光を減光し、その光強度を調整する光量調節機構40と、光調節機構40からのレーザ光の光径を調整するビームエキスパンダ41と、ビームエキスパンダ41からのレーザ光を所定のビーム径の平行光束に整形するビーム幅整形光学系14と、ビーム幅整形光学系14の動作を制御するビーム幅制御機構16と、ビーム幅整形光学系14からのレーザ光を照明光21として半導体ウエハ100の表面に照射し、照明スポット3(後の図7参照)を形成するレンズ18とを備えている。
【0019】
ビーム幅整形光学系14は、照明光21の断面形状を所定の一方向に圧縮して楕円形にする機能を有している。また、ビーム幅制御機構16は、ビーム幅整形光学系14を制御することにより、楕円形に整形された照明光21の断面形状における縦横比を1:1から1:1/8の間で変化させる。なお、照明光21の断面形状(縦横比)によらず、その照明光21全体の強度は一定に保たれる。
【0020】
照明光21は例えばP偏光であり、被検査物である半導体ウエハ100の表面に、概略、結晶Siに対するブリュースター角で斜入射するように構成されている。このため照明スポット3は概略楕円形状をしており、その長軸を比検査物移動ステージ102の副走査方向、すなわち、主走査方向に直行する方向に向けて形成されている。
【0021】
ここで、照度が照明スポット3の中心部のeの2乗分の1(eは自然対数の底)に低下する輪郭線の内部を、あらためて照明スポット3と定義する。この照明スポット3の長軸方向の幅をd1、短軸方向の幅をd2とする。ビーム幅整形光学系14において、レーザ光の断面形状が圧縮される方向はこの長径d1の方向に対応しており、短径d2は一定に保たれる。ビーム幅整形光学系14における縦横比の圧縮率が1:1/K(ただし、1≦K≦8)であるとき、d1とd2の関係は次式で表わされる。
【0022】
【数1】

【0023】
また、照明・検出工学系110は、レーリー散乱に従うような微小な異物(異物、傷、欠陥、汚れ等)1に対して効率良くその散乱光(散乱・回折・反射光)を捕捉できるよう、低い仰角で散乱光を集光できるように配置された集光レンズ5と、異物1からの散乱光を検出する光検出器(例えば、光電子増倍管)7とを備えている。なお、本実施例では光検出器7として光電子増倍管を用いているが、異物1からの散乱光を高感度に検出できる光検出器であれば他の検出原理の光検出器であっても良い。
【0024】
照明・検出制御系140は、増幅器26、A/D変換器30、粒径算出機構120、異物・欠陥判定機構108、異物・欠陥座標検出機構130、及び検査座標検出機構106を備えている。
【0025】
光検出器7からの散乱光信号は増幅器26で増幅された後、A/D変換器30で予め定められたサンプリング間隔毎にサンプリングされ、デジタルデータに変換される。A/D変換器30によるサンプリング間隔は主走査の1回転の間を概略一定の等角度間隔で刻むように設定されている。異物1に対応する散乱光信号は、その異物1が照明スポット3の短軸方向の幅d2を横切る分の時間幅にわたり持続して発生するため、デジタルデータはこの時間幅に相当するサンプリング点数分にわたる統計演算処理が施される。統計演算処理を施された平均化デジタルデータは異物・欠陥判定機構108で、予め定められた検出閾値と比較され、平均化デジタルデータがその閾値以上であれば、異物・欠陥判定機構108はこの平均化デジタルデータが異物・欠陥よるものだと判定して、その後の平均化デジタルデータの値の変化を監視し、最大値が検出された時点で異物・欠陥判定情報を発生する。異物・欠陥座標検出機構130は、異物・欠陥判定情報が発生すると、検出された異物・欠陥の座標位置を算出する。続いて粒径算出機構120は平均化デジタルデータの最大値から、検出された異物・欠陥の大きさを算出する。この際、同じ大きさの異物・欠陥であっても、そこから得られる平均デジタルデータの大きさは照明スポット3の照度に比例して変化する。なお、ビーム幅整形光学系14によって照明スポット3の面積をK倍だけ変化させるように制御するので、検出された異物・欠陥の大きさを算出する際には、平均化デジタルデータを照明スポット3の面積変化に伴う照度変化分だけ補正して用いる。
【0026】
被検査物体移動ステージ102は、主走査である回転移動θと副走査である並進移動rを組合せて変化させることで、相対的に照明スポット3を半導体ウエハ100の概略全表面上で螺旋状に走査させる。被検査物体移動ステージ102には、検査中の主走査座標位置θと副走査座標位置rを検出するために、検査座標検出機構106が取り付けてある。なお、本実施の形態においては、主走査座標位置θの検出には光学読み取り式のロータリーエンコーダ(図示せず)を用い、副走査座標位置rには光学読み取り式のリニアエンコーダを用いているが、共に、高精度で角度または直線上の位置が検出できるセンサであれば、他の検出原理を用いたものでも良い。また、照明スポット3の走査は半導体ウエハ100の内周から外周に向かって行うが、逆であっても良い。
【0027】
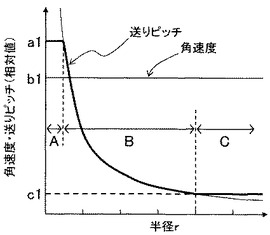
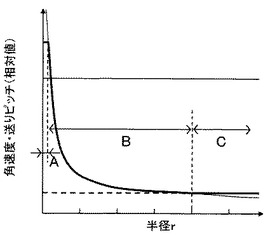
図2は、本発明の第1の実施の形態の被検査物表面における照明スポット3の位置と角速度、及び送りピッチの関係の一例を示す図である。
【0028】
図2において、縦軸は被検査物移動ステージ102の回転ステージ103による半導体ウエハ100の主走査方向への回転移動速度(角速度)、及び並進ステージ104による半導体100ウエハの副走査方向への並進移動速度、すなわち、回転ステージが1回転する間に並進ステージ104が移動する距離(送りピッチ)を示しており、横軸は、ウエハ100の中心から照明スポット3までの距離(以下、半径と称する)rを示している。また、半導体ウエハ100を、その回転中心からの半径rによって、3つの領域A,B,Cとする。領域Aが最も回転中心に近い領域であり、領域Cが最も回転中心から遠い領域、すなわち、半導体ウエハ100の外縁部である。また、領域Bは領域Aと領域Bの間の領域である。
【0029】
角速度は、半径rによらず一定の値b1である。
【0030】
送りピッチは、領域Aにおいては一定値a1であり、領域Bにおいては半径rに概略反比例するように減少し、領域Cにおいては一定値c1である。ここで、領域Aを内周送りピッチ固定領域、領域Bを送りピッチ制御領域、領域Cを外周送りピッチ固定領域と称する。
【0031】
ここで、送りピッチpが、p>d1であると、半導体ウエハ100上で照明スポット3による螺旋状走査において照明光102が照射されず、検査されない隙間領域ができてしまうので、p≦d1となるよう、d1の大きさも上記pの変化に同期させて、半径rに概略反比例するように制御する。この制御は、ビーム幅制御機構16によりビーム幅整形光学系14を制御することで行う。上記のように主走査回転角速度、副走査送りピッチp、照明スポット3の長径d1を制御する結果、送りピッチ制御領域(領域B)においては、照明スポット3が半径rの位置にあるとき、半導体ウエハ100の表面に対する照明スポット3の主走査方向における相対移動速度(線速度)は角速度×反径rであり、半径rに比例する一方で、副走査の送りピッチpはrに反比例するため、その積である検査面積速度は概略一定となる。また前述のように、平均化デジタルデータは主走査の1回転の間を概略等角度間隔で刻んだサンプリング間隔毎に発生するため、送りピッチ制御領域(領域B)においては、半導体ウエハ100の表面上の単位面積あたりに含まれる平均化デジタルデータの点数は、概略一定となる。
【0032】
以上のように構成した表面検査装置にいて、半導体ウエハ100の中心から外周までの半径をR、半導体ウエハ100の全体を検査(走査)するのに必要な検査時間をT、主走査回転の総周数をMとし、そのうちの第i周目における送りピッチをpi(mm)、主走査回転速度をωi(r/s)、主走査の1回転に要する時間をΔTi(s)とし、かつ、副走査速度は主走査速度に比べて十分遅いと仮定すると、R及びTはそれぞれ下式のように表すことができる。
【0033】
【数2】
【0034】
【数3】
【0035】
送りピッチpは、前述のように検査中一定に保たれるので、p0を定数としてpi=p0とすると、式1は次式のように表わされる。
【0036】
【数4】
【0037】
上記式4より、半導体ウエハ100の全体を検査(走査)するのに必要な主走査回転の総周数Mは次式で表わされる。
【0038】
【数5】
【0039】
上記式5を式3に代入すると下記の関係式が得られる。
【0040】
【数6】
【0041】
被検査物移動ステージ102の主走査回転機構には回転可能な上限回転速度が存在するので、それをωmaxとすると、上記式6は次式のように表わされる。
【0042】
【数7】
【0043】
すなわち、次式が得られる。
【0044】
【数8】
【0045】
上記式8から、副走査送りピッチが一定である場合、主走査を常に上限回転速度であるωmaxで回転させても、検査時間TはTminより短くすることができないことがわかる。
【0046】
次に、各数値の一例を用いて、(1)表面検査時間T、(2)検出感度、(3)熱ダメージについて検証する。
【0047】
(1)表面検査時間T
まず、一例として直径300mmの半導体ウエハ100を考える。この半導体ウエハ100の全領域を検査(走査)するのに必要な検査時間をTとし、内周送りピッチ固定領域(図2の領域A)、送りピッチ制御領域(図2の領域B)、外周送りピッチ固定領域(図2の領域C)の各領域における照明スポット3の長径d1、および主走査回転の第i周目における送りピッチpiを次のように定義する。
・内周送りピッチ固定領域:0mm≦r<12.5mm,d1=0.4mm,pi=0.2mm
・送りピッチ制御領域 :12.5mm≦r<100mm,d1=5/rmm,pi=2.5/rmm
・外周送りピッチ固定領域:100mm≦r<150mm,d1=0.05mm,pi=0.025mm
上記のように定義した各領域における主走査回転の周回数は、
・内周送りピッチ固定領域:1≦i≦62
・送りピッチ制御領域 :63≦i≦2030
・外周送りピッチ固定領域:2031≦i≦4030
となり、主走査回転の総周数Mは、M=4030となる。
【0048】
ここで、領域A,B,Cの全てにおいて、d1とpiを
・領域A,B,C:d1=0.05mm ,pi=0.025mm
で一定とした場合には、
M=150/0.025=6000
となる。
【0049】
つまり、角速度一定で主走査回転を行った場合、半導体ウエハ100の全領域においてd1とpiを一定として検査(走査)した場合の検査時間Tと比較して、本実施の形態における表面検査は検査時間を約2/3Tとすることができる。
【0050】
(2)検出感度
次に、異物の検出感度について考える。本実施の形態においては、外周送りピッチ固定領域(図2の領域C)において、照明スポット3の長径d1、および副走査の送りピッチ(並進移動速度)pを一定に維持する。これらを従来技術と等しく設定した場合、検出感度は当然、従来技術と同等である。なお、この領域内では照明スポット3の照度が一定に保たれるので、線速度が最も遅くなる、最内周の送りピッチ制御領域(図2の領域A)との境界において検出感度が最も高くなる。
【0051】
次に、送りピッチ制御領域(図2の領域B)について考える。前述のように、半導体ウエハ100上にある異物1からの散乱光信号は異物1が照明スポット3の短径d2を横切る分の時間幅にわたり持続して発生すると考えることができるので、この場合、異物1からの散乱光を光検出器7で検出したときに得られる散乱信号の正味信号量Sは、<照明スポットの照度>に比例し、<照明スポット位置での線速度>に反比例することになる。この領域では、<照明スポットの照度>は<照明スポット位置の半径r>に比例して制御され、角速度一定送りの条件下では、<照明スポット位置での線速度>は<照明スポット位置の半径r>に比例するので、2つの要因の比<照明スポットの照度>/<照明スポット位置での線速度>は一定となる。一方、異物1検出時の雑音の大きさNは単位時間当たりの総照射強度の1/2乗、すなわち<照明スポットの照度>×<照明スポットの面積>の積の1/2乗に比例することが知られている。前述のように本実施例では、<照明スポットの面積>を変えても照射光21全体の強度は一定に保たれているので、雑音の大きさNへの影響は一定となる。これらの結果として、この領域内では、外周送りピッチ固定領域(図2の領域C)との境界における検出感度と概略等しい検出感度が得られる。
【0052】
次に、内周送りピッチ固定領域(図2の領域A)であるが、外周送りピッチ固定領域(図2の領域C)と同様にこの領域では<照明スポットの照度>が一定に保たれるので、最外周の送りピッチ制御領域(図2の領域C)との境界における検出感度が最も低く、この領域全体としてはそれよりも高い検出感度が得られる。すなわち、本実施の形態においては、外周送りピッチ固定領域(図2の領域C)において従来技術と同等の検出感度が得られ、それより内周においても外周部と少なくとも同等以上の検出感度が保たれると言うことができる。
【0053】
(3)熱ダメージ
次に、検査中に半導体ウエハ100が受ける熱ダメージについて考える。本実施の形態においては、前述のように照明に用いる照射光21全体の強度は概略一定に保たれ、内周部ほど照明スポット3の面積が大きくなっているため、内周部ほど照明スポット3の照度は減少する。検査中に半導体ウエハ100表面が受ける熱ダメージは、熱源である照明スポット3の相対移動線速度が等しい場合には、照明スポット3の照度に概略比例することが知られている。半径rが同一の位置においては、本実施例の技術でも従来技術でも線速度はほぼ等しく、内周部では本実施例の方が照明スポット3の照度が低いため、半導体ウエハ100表面が受ける熱ダメージを低減させることができる。また、熱ダメージは線速度が大きいほど小さくなり、線速度は照明スポット3の位置の半径rに比例して大きくなることから、照明スポット3の照度が一定であれば、熱ダメージは半導体ウエハ100外周部で小さく、内周部ほど大きくなる。前述のように本実施例では内周部ほど照明スポット3の照度が減少するため、熱ダメージは半導体ウエハ外周部で小さく、内周部ほど大きくなることを軽減させることができる。
【0054】
以上のように構成した本実施の形態においては、半導体ウエハ100における副走査の送りピッチ(並進移動速度)を、半導体ウエハ100の主走査における回転中心から照明スポット3までの距離に応じて制御するよう構成したので、表面検査における検出感度の低下、及び熱ダメージの増加を抑制しつつ、検査時間を短縮することができる。
【0055】
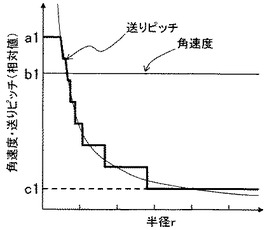
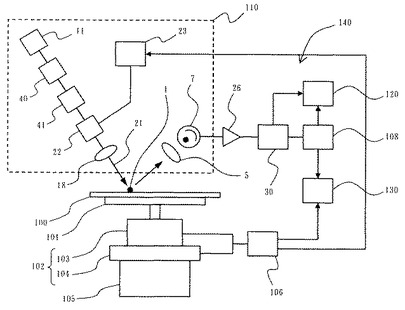
なお、以上のように構成した本実施の形態においては、図2で説明したように、送りピッチ制御領域(図2の領域B)において、送りピッチを半径rに概略反比例するように減少させるよう構成したがこれに限られず、送りピッチが半径rに概略反比例するようにすれば良い。例えば、図3に示すように、送りピッチを半径rに概略反比例するように減少させるようステップ状に変化させた場合においても、本実施の形態と同様の効果を得ることができる。
【0056】
<第2の実施の形態>
本発明の第2の実施の形態を図4及び図5を参照しつつ説明する。
【0057】
図4は本発明の第2の実施の形態に係る表面検査装置の全体構成を示す概略図であり、図5は本発明の第2の実施の形態の被検査物表面における照明スポット3の位置と角速度、及び送りピッチの関係を示す図である。図中、図4及び図5に示す部分と同等のものには同じ符号を付し、説明を省略する。
【0058】
図4において、本実施の形態の表面検査装置は、増幅器26の周波数帯域を制御する周波数帯域幅制御部27を備えている。
【0059】
周波数帯域制御部27は、被検査物移動ステージ102における副走査の送りピッチ(並進移動速度)を、半導体ウエハ100の主走査における回転中心から照明スポット3までの距離(半径r)に応じて制御する。前述のように、異物1による散乱・回折・反射光を光検出器7により検出した場合の散乱光信号は、異物1が照明スポット3の短径d2を横切る分の時間幅にわたり持続して発生するが、角速度一定送りの条件下においては線速度が照明スポット3の位置の半径rに比例し、短径d2を変化させない場合には時間幅は半径rに反比例するので、光検出器7からの散乱光信号の時間変化波形を通過させるのに必要な周波数帯域幅Δfは半径rに比例することになる。そこで、周波数帯域幅制御部27は、光検出器7の出力信号(散乱光信号)を増幅する際の周波数帯域幅Δfを照明スポット3の位置の半径rに比例させるよう制御する。
【0060】
A/D変換器30からのデジタルデータは異物・欠陥判定機構108で、予め定められた検出閾値と比較され、デジタルデータがその閾値以上であれば、異物・欠陥判定機構108はこのデジタルデータが異物・欠陥によるものだと判定して、その後のデジタルデータの値の変化を監視し、最大値が検出された時点で異物・欠陥判定情報を発生する。異物・欠陥座標検出機構130は、異物・欠陥判定情報が発生すると、検出された異物・欠陥の座標位置を算出する。続いて粒径算出機構120はデジタルデータの最大値から、検出された異物・欠陥の大きさを算出する。この際、同じ大きさの異物・欠陥であっても、そこから得られるデジタルデータの大きさは照明スポット3の照度に比例して変化するので、デジタルデータは照明スポット3の面積変化に伴う照度変化分だけ補正して用いる。
【0061】
図5において、縦軸は被検査物移動ステージ102の回転ステージ103による半導体ウエハ100の主走査方向への回転移動速度(角速度)、及び並進ステージ104による半導体100ウエハの副走査方向への並進移動速度、すなわち、回転ステージが1回転する間に並進ステージ104が移動する距離(送りピッチ)を示しており、横軸は、ウエハ100の中心から照明スポット3までの距離(以下、半径と称する)rを示している。また、半導体ウエハ100を、その回転中心からの半径rによって、3つの領域A,B,Cとする。領域Aが最も回転中心に近い領域であり、領域Cが最も回転中心から遠い領域、すなわち、半導体ウエハ100の外縁部である。また、領域Bは領域Aと領域Bの間の領域である。
【0062】
角速度は、半径rによらず一定の値b1である。
【0063】
送りピッチは、領域Aにおいては一定値a1であり、領域Bにおいては半径rの1/2乗に概略反比例するように減少し、領域Cにおいては一定値c1である。ここで、領域Aを内周送りピッチ固定領域、領域Bを送りピッチ制御領域、領域Cを外周送りピッチ固定領域と称する。
【0064】
次に、各数値の一例を用いて、(1)表面検査時間T、(2)検出感度、(3)熱ダメージについて検証する。
【0065】
(1)表面検査時間T
まず、一例として直径300mmの半導体ウエハ100を考える。この半導体ウエハ100の全領域を検査(走査)するのに必要な検査時間をTとし、内周送りピッチ固定領域(図5の領域A)、送りピッチ制御領域(図5の領域B)、外周送りピッチ固定領域(図5の領域C)の各領域における照明スポット3の長径d1、および主走査回転の第i周目における送りピッチpiを次のように定義する。
・内周送りピッチ固定領域:0mm≦r<1.5625mm,d1=0.4mm,pi=0.2mm
・送りピッチ制御領域 :1.5625mm≦r<100mm,d1=0.5/r1/2mm,pi=0.25/r1/2mm
・外周送りピッチ固定領域:100mm≦r<150mm,d1=0.05mm,pi=0.025mm
上記のように定義した各領域における主走査回転の周回数は、
・内周送りピッチ固定領域 : 1≦i≦7
・送りピッチ制御領域 : 8≦i≦2668
・外周送りピッチ固定領域 : 2669≦i≦4668
となり、主走査回転の総周数Mは、M=4668となる。
【0066】
ここで、領域A,B,Cの全てにおいて、d1とpiを
・領域A,B,C:d1=0.05mm,pi=0.025mm
で一定とした場合には、
M=150/0.025=6000
となる。
【0067】
つまり、角速度一定で主走査回転を行った場合、半導体ウエハ100の全領域においてd1とpiを一定として検査(走査)した場合の検査時間Tと比較して、本実施の形態における表面検査は検査時間を約1/1.3Tに短縮することができる。
【0068】
(2)検出感度
次に、異物の検出感度について考える。
【0069】
異物1からの散乱光を光検出器7で検出したときに得られる散乱光信号の正味信号量Sは<照明スポットの照度>に比例する一方、雑音の大きさNは<照明スポットの照度>×<照明スポットの面積>×Δfの積の1/2乗に比例する。その結果、正味信号量Sと雑音Nの比であるS/N比は、<照明スポットの照度>/(<照明スポットの面積>×Δf)の1/2乗に比例することになる。照明光21の全体の強度および照明スポット3の短径d2を検査中概略一定に保つものとすると、この場合、照明スポット3の長径d1を照明スポット3位置の半径rの1/2乗に反比例させるよう制御すれば、<照明スポットの照度>は半径rの1/2乗に比例し、<照明スポットの面積>は半径rの1/2乗に反比例し、Δfは半径rに比例するので、S/N比はこれらの因子に関し、概略一定に保たれる。そこで、回転ステージ103は、角速度一定で駆動させるが、並進ステージ104については図5内に示したように、半導体ウエハ100中心部の内周送りピッチ固定領域(図5の領域A)と外縁部の外周送りピッチ固定領域(図5の領域C)の2つの領域を除いた送りピッチ制御領域(図5の領域B)において回転ステージ103が1回転する間に並進ステージ104が移動する送りピッチpを、主走査回転中心と照明スポット3の間の距離の1/2乗、すなわち照明スポット3の位置の半径rの1/2乗に概略反比例するよう駆動させる。また、内周送りピッチ固定領域(図5の領域A)と外周送りピッチ固定領域(図5の領域C)では、pは一定値に固定して駆動させる。また、d1の大きさも上記pの変化に同期させて、照明スポット3の位置の半径rの1/2乗に概略反比例するように制御する。これにより、送りピッチ制御領域(図5の領域B)での検出感度は前述のように、この領域内でほぼ一定となる。また、内周送りピッチ固定領域(図5の領域A)と外周送りピッチ固定領域(図5の領域C)における検出感度については、第一の実施例と同様であるので、外周送りピッチ固定領域(図5の領域C)において従来技術と同等の検出感度が得られ、それより内周においても外周部と少なくとも同等以上の検出感度が保たれると言うことができる。
【0070】
(3)熱ダメージ
次に、検査中に半導体ウエハ100が受ける熱ダメージについて考える。本実施の形態においては、前述のように照明に用いる照射光21全体の強度は概略一定に保たれ、内周部ほど照明スポット3の面積が大きくなっているため、内周部ほど照明スポット3の照度は減少する。検査中に半導体ウエハ100の表面が受ける熱ダメージは、半導体ウエハ100の外周部で小さく、内周部ほど大きくなることを軽減させることができる。
【0071】
その他の構成は第1の実施の形態と同様である。
【0072】
以上のように構成した本実施の形態においても、半導体ウエハ100における副走査の送りピッチ(並進移動速度)を、半導体ウエハ100の主走査における回転中心から照明スポット3までの距離に応じて制御するよう構成したので、第1の実施の形態と同様に、表面検査における検出感度の低下、及び熱ダメージの増加を抑制しつつ、検査時間を短縮することができる。
【0073】
<第3の実施の形態>
本発明の第3の実施の形態を図6及び図7を参照しつつ説明する。
【0074】
図6は本発明の第3の実施の形態に係る表面検査装置の全体構成を示す概略図である図中、図1に示す部分と同等のものには同じ符号を付し、説明を省略する。本実施の形態の表面検査装置は、第1の実施の形態におけるビーム幅成形光学系14及びビーム幅制御機構16に換えて、ビーム分割機構22及びビーム間隔制御機構23を備え、複数の照明スポット3を半導体ウエハ100上に形成し、その照明スポット3の重複率を、半導体ウエハ100の主走査における回転中心から照明スポット3までの距離が近いほど低く、距離が遠いほど高くなるよう制御するものである。
【0075】
図6において、ビーム分割機構22は、レーザ光を分割し、複数(例えば、4つ)の照射光21を半導体100の表面に照射して複数(例えば、4つ)の照明スポット3を形成する(図7参照)。
【0076】
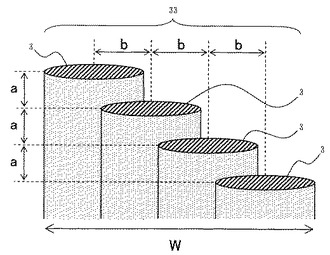
図7は本発明の第3の実施の形態の被検査物表面における照明スポット群33を示す図である。
【0077】
図7において、縦方向が被検査物移動テーブル102における主走査方向に沿う方向であり、横方向が副走査方向に沿う方向(主走査方向に対して直交する方向)である。
【0078】
各照明スポット3は、それぞれ主走査方向及び副走査方向における中心を基準とし、主走査方向に沿う方向にa、副走査方向に沿う方向にbの間隔を隔てて等間隔に形成される。間隔bは、主走査に伴って4個の照明スポット3が描く軌跡が重複するよう設定される。複数の照明スポット3による軌跡の副走査方向の幅Wが照明スポット群33の有効照明幅となる。表面検査中、間隔aは概略一定に保たれるが、間隔bはビーム間隔制御機構23により、照明スポット群33の中心位置の半径rに概略反比例するように制御される。これにより、有効照明幅Wは半径rに概略反比例して変化させることができる。
【0079】
その他の構成は、第1の実施の形態と同様である。
【0080】
以上のように構成した本実施の形態においても、第1の実施の形態と同様に、表面検査における検出感度の低下、及び熱ダメージの増加を抑制しつつ、検査時間を短縮することができる。
【0081】
なお、本実施例のビーム間隔制御機構23を、間隔bが照明スポット群33の中心位置の半径rの1/2乗に概略反比例するように制御するよう構成すれば、第2の実施の形態における有効照明幅Wを変化させる手段の代替手段として用いることができることは言うまでもない。
【0082】
<第4の実施の形態>
本発明の第4の実施の形態を図8を参照しつつ説明する。
【0083】
図8は本発明の第4の実施の形態に係る表面検査装置の全体構成を示す概略図である図中、図1及び図6に示す部分と同等のものには同じ符号を付し、説明を省略する。本実施の形態の表面検査装置は、第3の実施の形態におけるビーム間隔制御機構23に換えて、ビーム数制御機構24を備え、複数の照明スポット3を半導体ウエハ100上に形成し、その照明スポット3の数を、半導体ウエハ100の主走査における回転中心から照明スポット3までの距離が近いほど多く、距離が遠いほど少なくなるよう制御するものである。
【0084】
図8において、ビーム分割機構22は、レーザ光を分割し、複数(例えば、4つ)の照射光21を半導体100の表面に照射して複数(例えば、4つ)の照明スポット3を形成する(図7参照)。
【0085】
本実施の形態においては、表面検査中、間隔a及び間隔bは概略一定に保たれるが、照明スポット群33を構成する複数の照明スポット3の個数は分割ビーム数制御機構24により、照明スポット群33の中心位置の半径rに概略反比例するように制御される。これにより、有効照明幅Wは半径rに概略反比例して変化させることができる。
【0086】
その他の構成は、第3の実施の形態と同様である。
【0087】
以上のように構成した本実施の形態においても、第1及び第3の実施の形態と同様に、表面検査における検出感度の低下、及び熱ダメージの増加を抑制しつつ、検査時間を短縮することができる。
【0088】
なお、本実施例の分割ビーム数制御機構24を、間隔bが照明スポット群33の中心位置の半径rの1/2乗に概略反比例するように制御するよう構成すれば、第2の実施の形態の有効照明幅Wを変化させる手段の代替手段として用いることができることは言うまでもない。
【符号の説明】
【0089】
1 異物
5 集光レンズ
7 光検出器
11 光源
14 ビーム幅整形光学系
16 ビーム幅制御機構
18 照射レンズ
21 照明光
26 増幅器
30 A/D変換器
40 光量調節機構
41 ビームエキスパンダ
100 半導体ウエハ
101 チャック
102 被検査物移動ステージ
103 回転ステージ
104 並進ステージ
105 Zステージ
106 検査座標検出機構
108 異物・欠陥判定機構
110 照明・検出光学系
120 粒径算出機構
130 異物・欠陥座標検出機構
140 照明・検出制御系
【技術分野】
【0001】
本発明は、半導体基板や薄膜基板等の表面に存在する異物、きず、欠陥、汚れ等(以下、これらを総称して異物と記載する)を検出する検査装置及び検査方法に関する。
【背景技術】
【0002】
半導体基板や薄膜基板等(以下、これらを総称して被検査物と称する)の製造工程においては、被検査物の表面上の異物、傷、欠陥、汚れ等(以下、これらを総称して異物と称する)を検出し、管理することにより、製造装置の発塵状況や工程の清浄度などを監視し、製品の品質や歩留りの低下を抑制することが重要である。
【0003】
そのような被検査物の表面における異物を検出する装置としては、例えば、特許文献1及び2に記載されているように、被検査物の表面に検査光を固定照射し、披検査物を回転移動しながら並進移動することによって、照明光により照明された領域(以下、照明スポットと称する)で被検査物の表面を螺旋状に走査し(このとき、被検査物の回転方向の走査を主走査、その主走査に対して直交する方向の走査を副走査と呼ぶ)、被検査基板の表面で発生した散乱光を検出することにより、被検査物の表面上または表面近傍内部に存在する異物を検出する表面検査装置が開示されている。
【0004】
また、特許文献3には、照明スポットの被検査物における主走査方向の径を可変とし、照明スポットが被検査物の回転中心に近いほど、その主走査方向の径を大きく、回転中心から遠ざかるほど小さくなるように変化させることにより、被検査物における表面温度上昇および異物・欠陥の検出感度を検査中概略一定に保つようにしたものが開示されている。また、特許文献4及び5には、被検査物の表面に固定径の照明スポットを複数形成し、それら複数の照明スポットからの散乱光を検出する技術が開示されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2007−309713号公報
【特許文献2】特開2008−32582号公報
【特許文献3】米国特許出願公開第2006/0256325号明細書
【特許文献4】特開2008−8803号公報
【特許文献5】特開2008−20359号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
近年、半導体基板や薄膜基板等(被検査物)の表面検査において、検出が要求される異物のサイズが急速に小さくなってきており、また、これら被検査物の面積は増大傾向にあるので、被検査物を検査するのに必要な検査時間の増大が懸念されている。
【0007】
表面検査に要する時間を短縮する方法としては、例えは、回転数を増加させる方法が考えられるが、被検査物の強度や設置装置への固定強度の観点から設定される上限の回転速度で動作させている場合が多く、したがって、さらなる回転速度の高速化は期待できない。
【0008】
また、その他の方法として、例えば、照明スポットの照度を保ったまま、照明スポットの副走査方向の径を大きくすると共に、それに対応して副走査方向の送りピッチを大きくし、被検査物が1回転する間に照明スポットにより走査する面積を増加させることにより、検査時間の短縮を図ることが考えられる。
【0009】
しかしながら、照明スポットの照度を保ったまま、副走査方向の径を大きくすると、被検査物表面の微小ラフネスから生じる背景散乱光が増大して、異物の検出感度が低下してしまう。また、照明スポットの照度を増やせば、検出感度の低下はある程度抑制できるが、被検査物への熱ダメージが増大してしまう。
【0010】
本発明は上記に鑑みてなされたものであり、表面検査における検出感度の低下、及び熱ダメージの増加を抑制しつつ、検査時間を短縮することができる表面検査装置及び表面検査方法を提供することを目的とする。
【課題を解決するための手段】
【0011】
上記目的を達成するために、本発明は、被検査物を主走査として回転移動させ、副走査として並進移動させる披検査物移動手段と、前記被検査物の表面に照明光を照射して、その照明光の照射範囲である照明スポットを形成する照明光照射手段と、前記照明スポットからの散乱・回折・反射光を検出する光検出手段と、前記光検出手段からの検出結果に基づいて前記被検査物の表面上または表面近傍内部に存在する異物を検出する異物検出手段とを備え、前記被検査物移動手段における副走査の並進移動速度を、前記被検査物の主走査における回転中心から前記照明スポットまでの距離に応じて制御するものとする。
【発明の効果】
【0012】
本発明においては、表面検査における検出感度の低下、及び熱ダメージの増加を抑制しつつ、検査時間を短縮することができる。
【図面の簡単な説明】
【0013】
【図1】本発明の第1の実施の形態に係る表面検査装置の全体構成を示す概略図である。
【図2】本発明の第1の実施の形態の被検査物表面における照明スポット位置と角速度、及び送りピッチの関係の一例を示す図である。
【図3】本発明の第1の実施の形態の被検査物表面における照明スポット位置と角速度、及び送りピッチの関係のその他の例を示す図である。
【図4】本発明の第2の実施の形態に係る表面検査装置の全体構成を示す概略図である。
【図5】本発明の第2の実施の形態の被検査物表面における照明スポット位置と角速度、及び送りピッチの関係の一例を示す図である。
【図6】本発明の第3の実施の形態に係る表面検査装置の全体構成を示す概略図である。
【図7】本発明の第3の実施の形態の被検査物表面における照明スポットを示す図である。
【図8】本発明の第4の実施の形態に係る表面検査装置の全体構成を示す概略図である。
【発明を実施するための形態】
【0014】
以下、本発明の実施の形態を図面を参照しつつ説明する。
【0015】
<第1の実施の形態>
図1は、本発明の第1の実施の形態に係る表面検査装置の全体構成を示す概略図である。
【0016】
図1において、本実施の形態の表面検査装置は、被検査物の一例である半導体ウエハ100と、半導体ウエハ100を真空吸着するチャック101と、チャック101を半導体ウエハ100と共に回転移動する回転ステージ103及び並進移動する並進ステージ104とから成る被検査物移動ステージ102と、真空チャック101及び被検査物移動ステージ102を垂直方向に移動することにより半導体ウエハ100を垂直方向に移動するZステージ105と、半導体ウエハ100の上方に配置され、その半導体ウエハ100の表面に照明光21を照射し、半導体ウエハ100の表面からの散乱・回折・反射光を検出する照明・検出光学系110と、被検査物移動ステージ102及び照明・検出光学系110の照明・検出動作を制御する照明・検出制御系140とを備えている。
【0017】
半導体ウエハ100の表面に照明光21を照射し、被検査物移動ステージ102により半導体ウエハ100を回転移動及び並進移動させることにより、半導体ウエハ100の表面を照明光21により走査する。このとき、回転ステージ103が半導体100を回転移動させることにより行われる走査、すなわち回転方向に沿う方向の走査を主走査、並進ステージ104が半導体100を並進移動することにより行われる走査、すなわち主走査に直行する方向の走査を副走査と呼ぶ。
【0018】
照明・検出光学系110は、レーザ光を生成し射出する光源11と、光源11から射出されたレーザ光を減光し、その光強度を調整する光量調節機構40と、光調節機構40からのレーザ光の光径を調整するビームエキスパンダ41と、ビームエキスパンダ41からのレーザ光を所定のビーム径の平行光束に整形するビーム幅整形光学系14と、ビーム幅整形光学系14の動作を制御するビーム幅制御機構16と、ビーム幅整形光学系14からのレーザ光を照明光21として半導体ウエハ100の表面に照射し、照明スポット3(後の図7参照)を形成するレンズ18とを備えている。
【0019】
ビーム幅整形光学系14は、照明光21の断面形状を所定の一方向に圧縮して楕円形にする機能を有している。また、ビーム幅制御機構16は、ビーム幅整形光学系14を制御することにより、楕円形に整形された照明光21の断面形状における縦横比を1:1から1:1/8の間で変化させる。なお、照明光21の断面形状(縦横比)によらず、その照明光21全体の強度は一定に保たれる。
【0020】
照明光21は例えばP偏光であり、被検査物である半導体ウエハ100の表面に、概略、結晶Siに対するブリュースター角で斜入射するように構成されている。このため照明スポット3は概略楕円形状をしており、その長軸を比検査物移動ステージ102の副走査方向、すなわち、主走査方向に直行する方向に向けて形成されている。
【0021】
ここで、照度が照明スポット3の中心部のeの2乗分の1(eは自然対数の底)に低下する輪郭線の内部を、あらためて照明スポット3と定義する。この照明スポット3の長軸方向の幅をd1、短軸方向の幅をd2とする。ビーム幅整形光学系14において、レーザ光の断面形状が圧縮される方向はこの長径d1の方向に対応しており、短径d2は一定に保たれる。ビーム幅整形光学系14における縦横比の圧縮率が1:1/K(ただし、1≦K≦8)であるとき、d1とd2の関係は次式で表わされる。
【0022】
【数1】
【0023】
また、照明・検出工学系110は、レーリー散乱に従うような微小な異物(異物、傷、欠陥、汚れ等)1に対して効率良くその散乱光(散乱・回折・反射光)を捕捉できるよう、低い仰角で散乱光を集光できるように配置された集光レンズ5と、異物1からの散乱光を検出する光検出器(例えば、光電子増倍管)7とを備えている。なお、本実施例では光検出器7として光電子増倍管を用いているが、異物1からの散乱光を高感度に検出できる光検出器であれば他の検出原理の光検出器であっても良い。
【0024】
照明・検出制御系140は、増幅器26、A/D変換器30、粒径算出機構120、異物・欠陥判定機構108、異物・欠陥座標検出機構130、及び検査座標検出機構106を備えている。
【0025】
光検出器7からの散乱光信号は増幅器26で増幅された後、A/D変換器30で予め定められたサンプリング間隔毎にサンプリングされ、デジタルデータに変換される。A/D変換器30によるサンプリング間隔は主走査の1回転の間を概略一定の等角度間隔で刻むように設定されている。異物1に対応する散乱光信号は、その異物1が照明スポット3の短軸方向の幅d2を横切る分の時間幅にわたり持続して発生するため、デジタルデータはこの時間幅に相当するサンプリング点数分にわたる統計演算処理が施される。統計演算処理を施された平均化デジタルデータは異物・欠陥判定機構108で、予め定められた検出閾値と比較され、平均化デジタルデータがその閾値以上であれば、異物・欠陥判定機構108はこの平均化デジタルデータが異物・欠陥よるものだと判定して、その後の平均化デジタルデータの値の変化を監視し、最大値が検出された時点で異物・欠陥判定情報を発生する。異物・欠陥座標検出機構130は、異物・欠陥判定情報が発生すると、検出された異物・欠陥の座標位置を算出する。続いて粒径算出機構120は平均化デジタルデータの最大値から、検出された異物・欠陥の大きさを算出する。この際、同じ大きさの異物・欠陥であっても、そこから得られる平均デジタルデータの大きさは照明スポット3の照度に比例して変化する。なお、ビーム幅整形光学系14によって照明スポット3の面積をK倍だけ変化させるように制御するので、検出された異物・欠陥の大きさを算出する際には、平均化デジタルデータを照明スポット3の面積変化に伴う照度変化分だけ補正して用いる。
【0026】
被検査物体移動ステージ102は、主走査である回転移動θと副走査である並進移動rを組合せて変化させることで、相対的に照明スポット3を半導体ウエハ100の概略全表面上で螺旋状に走査させる。被検査物体移動ステージ102には、検査中の主走査座標位置θと副走査座標位置rを検出するために、検査座標検出機構106が取り付けてある。なお、本実施の形態においては、主走査座標位置θの検出には光学読み取り式のロータリーエンコーダ(図示せず)を用い、副走査座標位置rには光学読み取り式のリニアエンコーダを用いているが、共に、高精度で角度または直線上の位置が検出できるセンサであれば、他の検出原理を用いたものでも良い。また、照明スポット3の走査は半導体ウエハ100の内周から外周に向かって行うが、逆であっても良い。
【0027】
図2は、本発明の第1の実施の形態の被検査物表面における照明スポット3の位置と角速度、及び送りピッチの関係の一例を示す図である。
【0028】
図2において、縦軸は被検査物移動ステージ102の回転ステージ103による半導体ウエハ100の主走査方向への回転移動速度(角速度)、及び並進ステージ104による半導体100ウエハの副走査方向への並進移動速度、すなわち、回転ステージが1回転する間に並進ステージ104が移動する距離(送りピッチ)を示しており、横軸は、ウエハ100の中心から照明スポット3までの距離(以下、半径と称する)rを示している。また、半導体ウエハ100を、その回転中心からの半径rによって、3つの領域A,B,Cとする。領域Aが最も回転中心に近い領域であり、領域Cが最も回転中心から遠い領域、すなわち、半導体ウエハ100の外縁部である。また、領域Bは領域Aと領域Bの間の領域である。
【0029】
角速度は、半径rによらず一定の値b1である。
【0030】
送りピッチは、領域Aにおいては一定値a1であり、領域Bにおいては半径rに概略反比例するように減少し、領域Cにおいては一定値c1である。ここで、領域Aを内周送りピッチ固定領域、領域Bを送りピッチ制御領域、領域Cを外周送りピッチ固定領域と称する。
【0031】
ここで、送りピッチpが、p>d1であると、半導体ウエハ100上で照明スポット3による螺旋状走査において照明光102が照射されず、検査されない隙間領域ができてしまうので、p≦d1となるよう、d1の大きさも上記pの変化に同期させて、半径rに概略反比例するように制御する。この制御は、ビーム幅制御機構16によりビーム幅整形光学系14を制御することで行う。上記のように主走査回転角速度、副走査送りピッチp、照明スポット3の長径d1を制御する結果、送りピッチ制御領域(領域B)においては、照明スポット3が半径rの位置にあるとき、半導体ウエハ100の表面に対する照明スポット3の主走査方向における相対移動速度(線速度)は角速度×反径rであり、半径rに比例する一方で、副走査の送りピッチpはrに反比例するため、その積である検査面積速度は概略一定となる。また前述のように、平均化デジタルデータは主走査の1回転の間を概略等角度間隔で刻んだサンプリング間隔毎に発生するため、送りピッチ制御領域(領域B)においては、半導体ウエハ100の表面上の単位面積あたりに含まれる平均化デジタルデータの点数は、概略一定となる。
【0032】
以上のように構成した表面検査装置にいて、半導体ウエハ100の中心から外周までの半径をR、半導体ウエハ100の全体を検査(走査)するのに必要な検査時間をT、主走査回転の総周数をMとし、そのうちの第i周目における送りピッチをpi(mm)、主走査回転速度をωi(r/s)、主走査の1回転に要する時間をΔTi(s)とし、かつ、副走査速度は主走査速度に比べて十分遅いと仮定すると、R及びTはそれぞれ下式のように表すことができる。
【0033】
【数2】
【0034】
【数3】
【0035】
送りピッチpは、前述のように検査中一定に保たれるので、p0を定数としてpi=p0とすると、式1は次式のように表わされる。
【0036】
【数4】
【0037】
上記式4より、半導体ウエハ100の全体を検査(走査)するのに必要な主走査回転の総周数Mは次式で表わされる。
【0038】
【数5】
【0039】
上記式5を式3に代入すると下記の関係式が得られる。
【0040】
【数6】
【0041】
被検査物移動ステージ102の主走査回転機構には回転可能な上限回転速度が存在するので、それをωmaxとすると、上記式6は次式のように表わされる。
【0042】
【数7】
【0043】
すなわち、次式が得られる。
【0044】
【数8】
【0045】
上記式8から、副走査送りピッチが一定である場合、主走査を常に上限回転速度であるωmaxで回転させても、検査時間TはTminより短くすることができないことがわかる。
【0046】
次に、各数値の一例を用いて、(1)表面検査時間T、(2)検出感度、(3)熱ダメージについて検証する。
【0047】
(1)表面検査時間T
まず、一例として直径300mmの半導体ウエハ100を考える。この半導体ウエハ100の全領域を検査(走査)するのに必要な検査時間をTとし、内周送りピッチ固定領域(図2の領域A)、送りピッチ制御領域(図2の領域B)、外周送りピッチ固定領域(図2の領域C)の各領域における照明スポット3の長径d1、および主走査回転の第i周目における送りピッチpiを次のように定義する。
・内周送りピッチ固定領域:0mm≦r<12.5mm,d1=0.4mm,pi=0.2mm
・送りピッチ制御領域 :12.5mm≦r<100mm,d1=5/rmm,pi=2.5/rmm
・外周送りピッチ固定領域:100mm≦r<150mm,d1=0.05mm,pi=0.025mm
上記のように定義した各領域における主走査回転の周回数は、
・内周送りピッチ固定領域:1≦i≦62
・送りピッチ制御領域 :63≦i≦2030
・外周送りピッチ固定領域:2031≦i≦4030
となり、主走査回転の総周数Mは、M=4030となる。
【0048】
ここで、領域A,B,Cの全てにおいて、d1とpiを
・領域A,B,C:d1=0.05mm ,pi=0.025mm
で一定とした場合には、
M=150/0.025=6000
となる。
【0049】
つまり、角速度一定で主走査回転を行った場合、半導体ウエハ100の全領域においてd1とpiを一定として検査(走査)した場合の検査時間Tと比較して、本実施の形態における表面検査は検査時間を約2/3Tとすることができる。
【0050】
(2)検出感度
次に、異物の検出感度について考える。本実施の形態においては、外周送りピッチ固定領域(図2の領域C)において、照明スポット3の長径d1、および副走査の送りピッチ(並進移動速度)pを一定に維持する。これらを従来技術と等しく設定した場合、検出感度は当然、従来技術と同等である。なお、この領域内では照明スポット3の照度が一定に保たれるので、線速度が最も遅くなる、最内周の送りピッチ制御領域(図2の領域A)との境界において検出感度が最も高くなる。
【0051】
次に、送りピッチ制御領域(図2の領域B)について考える。前述のように、半導体ウエハ100上にある異物1からの散乱光信号は異物1が照明スポット3の短径d2を横切る分の時間幅にわたり持続して発生すると考えることができるので、この場合、異物1からの散乱光を光検出器7で検出したときに得られる散乱信号の正味信号量Sは、<照明スポットの照度>に比例し、<照明スポット位置での線速度>に反比例することになる。この領域では、<照明スポットの照度>は<照明スポット位置の半径r>に比例して制御され、角速度一定送りの条件下では、<照明スポット位置での線速度>は<照明スポット位置の半径r>に比例するので、2つの要因の比<照明スポットの照度>/<照明スポット位置での線速度>は一定となる。一方、異物1検出時の雑音の大きさNは単位時間当たりの総照射強度の1/2乗、すなわち<照明スポットの照度>×<照明スポットの面積>の積の1/2乗に比例することが知られている。前述のように本実施例では、<照明スポットの面積>を変えても照射光21全体の強度は一定に保たれているので、雑音の大きさNへの影響は一定となる。これらの結果として、この領域内では、外周送りピッチ固定領域(図2の領域C)との境界における検出感度と概略等しい検出感度が得られる。
【0052】
次に、内周送りピッチ固定領域(図2の領域A)であるが、外周送りピッチ固定領域(図2の領域C)と同様にこの領域では<照明スポットの照度>が一定に保たれるので、最外周の送りピッチ制御領域(図2の領域C)との境界における検出感度が最も低く、この領域全体としてはそれよりも高い検出感度が得られる。すなわち、本実施の形態においては、外周送りピッチ固定領域(図2の領域C)において従来技術と同等の検出感度が得られ、それより内周においても外周部と少なくとも同等以上の検出感度が保たれると言うことができる。
【0053】
(3)熱ダメージ
次に、検査中に半導体ウエハ100が受ける熱ダメージについて考える。本実施の形態においては、前述のように照明に用いる照射光21全体の強度は概略一定に保たれ、内周部ほど照明スポット3の面積が大きくなっているため、内周部ほど照明スポット3の照度は減少する。検査中に半導体ウエハ100表面が受ける熱ダメージは、熱源である照明スポット3の相対移動線速度が等しい場合には、照明スポット3の照度に概略比例することが知られている。半径rが同一の位置においては、本実施例の技術でも従来技術でも線速度はほぼ等しく、内周部では本実施例の方が照明スポット3の照度が低いため、半導体ウエハ100表面が受ける熱ダメージを低減させることができる。また、熱ダメージは線速度が大きいほど小さくなり、線速度は照明スポット3の位置の半径rに比例して大きくなることから、照明スポット3の照度が一定であれば、熱ダメージは半導体ウエハ100外周部で小さく、内周部ほど大きくなる。前述のように本実施例では内周部ほど照明スポット3の照度が減少するため、熱ダメージは半導体ウエハ外周部で小さく、内周部ほど大きくなることを軽減させることができる。
【0054】
以上のように構成した本実施の形態においては、半導体ウエハ100における副走査の送りピッチ(並進移動速度)を、半導体ウエハ100の主走査における回転中心から照明スポット3までの距離に応じて制御するよう構成したので、表面検査における検出感度の低下、及び熱ダメージの増加を抑制しつつ、検査時間を短縮することができる。
【0055】
なお、以上のように構成した本実施の形態においては、図2で説明したように、送りピッチ制御領域(図2の領域B)において、送りピッチを半径rに概略反比例するように減少させるよう構成したがこれに限られず、送りピッチが半径rに概略反比例するようにすれば良い。例えば、図3に示すように、送りピッチを半径rに概略反比例するように減少させるようステップ状に変化させた場合においても、本実施の形態と同様の効果を得ることができる。
【0056】
<第2の実施の形態>
本発明の第2の実施の形態を図4及び図5を参照しつつ説明する。
【0057】
図4は本発明の第2の実施の形態に係る表面検査装置の全体構成を示す概略図であり、図5は本発明の第2の実施の形態の被検査物表面における照明スポット3の位置と角速度、及び送りピッチの関係を示す図である。図中、図4及び図5に示す部分と同等のものには同じ符号を付し、説明を省略する。
【0058】
図4において、本実施の形態の表面検査装置は、増幅器26の周波数帯域を制御する周波数帯域幅制御部27を備えている。
【0059】
周波数帯域制御部27は、被検査物移動ステージ102における副走査の送りピッチ(並進移動速度)を、半導体ウエハ100の主走査における回転中心から照明スポット3までの距離(半径r)に応じて制御する。前述のように、異物1による散乱・回折・反射光を光検出器7により検出した場合の散乱光信号は、異物1が照明スポット3の短径d2を横切る分の時間幅にわたり持続して発生するが、角速度一定送りの条件下においては線速度が照明スポット3の位置の半径rに比例し、短径d2を変化させない場合には時間幅は半径rに反比例するので、光検出器7からの散乱光信号の時間変化波形を通過させるのに必要な周波数帯域幅Δfは半径rに比例することになる。そこで、周波数帯域幅制御部27は、光検出器7の出力信号(散乱光信号)を増幅する際の周波数帯域幅Δfを照明スポット3の位置の半径rに比例させるよう制御する。
【0060】
A/D変換器30からのデジタルデータは異物・欠陥判定機構108で、予め定められた検出閾値と比較され、デジタルデータがその閾値以上であれば、異物・欠陥判定機構108はこのデジタルデータが異物・欠陥によるものだと判定して、その後のデジタルデータの値の変化を監視し、最大値が検出された時点で異物・欠陥判定情報を発生する。異物・欠陥座標検出機構130は、異物・欠陥判定情報が発生すると、検出された異物・欠陥の座標位置を算出する。続いて粒径算出機構120はデジタルデータの最大値から、検出された異物・欠陥の大きさを算出する。この際、同じ大きさの異物・欠陥であっても、そこから得られるデジタルデータの大きさは照明スポット3の照度に比例して変化するので、デジタルデータは照明スポット3の面積変化に伴う照度変化分だけ補正して用いる。
【0061】
図5において、縦軸は被検査物移動ステージ102の回転ステージ103による半導体ウエハ100の主走査方向への回転移動速度(角速度)、及び並進ステージ104による半導体100ウエハの副走査方向への並進移動速度、すなわち、回転ステージが1回転する間に並進ステージ104が移動する距離(送りピッチ)を示しており、横軸は、ウエハ100の中心から照明スポット3までの距離(以下、半径と称する)rを示している。また、半導体ウエハ100を、その回転中心からの半径rによって、3つの領域A,B,Cとする。領域Aが最も回転中心に近い領域であり、領域Cが最も回転中心から遠い領域、すなわち、半導体ウエハ100の外縁部である。また、領域Bは領域Aと領域Bの間の領域である。
【0062】
角速度は、半径rによらず一定の値b1である。
【0063】
送りピッチは、領域Aにおいては一定値a1であり、領域Bにおいては半径rの1/2乗に概略反比例するように減少し、領域Cにおいては一定値c1である。ここで、領域Aを内周送りピッチ固定領域、領域Bを送りピッチ制御領域、領域Cを外周送りピッチ固定領域と称する。
【0064】
次に、各数値の一例を用いて、(1)表面検査時間T、(2)検出感度、(3)熱ダメージについて検証する。
【0065】
(1)表面検査時間T
まず、一例として直径300mmの半導体ウエハ100を考える。この半導体ウエハ100の全領域を検査(走査)するのに必要な検査時間をTとし、内周送りピッチ固定領域(図5の領域A)、送りピッチ制御領域(図5の領域B)、外周送りピッチ固定領域(図5の領域C)の各領域における照明スポット3の長径d1、および主走査回転の第i周目における送りピッチpiを次のように定義する。
・内周送りピッチ固定領域:0mm≦r<1.5625mm,d1=0.4mm,pi=0.2mm
・送りピッチ制御領域 :1.5625mm≦r<100mm,d1=0.5/r1/2mm,pi=0.25/r1/2mm
・外周送りピッチ固定領域:100mm≦r<150mm,d1=0.05mm,pi=0.025mm
上記のように定義した各領域における主走査回転の周回数は、
・内周送りピッチ固定領域 : 1≦i≦7
・送りピッチ制御領域 : 8≦i≦2668
・外周送りピッチ固定領域 : 2669≦i≦4668
となり、主走査回転の総周数Mは、M=4668となる。
【0066】
ここで、領域A,B,Cの全てにおいて、d1とpiを
・領域A,B,C:d1=0.05mm,pi=0.025mm
で一定とした場合には、
M=150/0.025=6000
となる。
【0067】
つまり、角速度一定で主走査回転を行った場合、半導体ウエハ100の全領域においてd1とpiを一定として検査(走査)した場合の検査時間Tと比較して、本実施の形態における表面検査は検査時間を約1/1.3Tに短縮することができる。
【0068】
(2)検出感度
次に、異物の検出感度について考える。
【0069】
異物1からの散乱光を光検出器7で検出したときに得られる散乱光信号の正味信号量Sは<照明スポットの照度>に比例する一方、雑音の大きさNは<照明スポットの照度>×<照明スポットの面積>×Δfの積の1/2乗に比例する。その結果、正味信号量Sと雑音Nの比であるS/N比は、<照明スポットの照度>/(<照明スポットの面積>×Δf)の1/2乗に比例することになる。照明光21の全体の強度および照明スポット3の短径d2を検査中概略一定に保つものとすると、この場合、照明スポット3の長径d1を照明スポット3位置の半径rの1/2乗に反比例させるよう制御すれば、<照明スポットの照度>は半径rの1/2乗に比例し、<照明スポットの面積>は半径rの1/2乗に反比例し、Δfは半径rに比例するので、S/N比はこれらの因子に関し、概略一定に保たれる。そこで、回転ステージ103は、角速度一定で駆動させるが、並進ステージ104については図5内に示したように、半導体ウエハ100中心部の内周送りピッチ固定領域(図5の領域A)と外縁部の外周送りピッチ固定領域(図5の領域C)の2つの領域を除いた送りピッチ制御領域(図5の領域B)において回転ステージ103が1回転する間に並進ステージ104が移動する送りピッチpを、主走査回転中心と照明スポット3の間の距離の1/2乗、すなわち照明スポット3の位置の半径rの1/2乗に概略反比例するよう駆動させる。また、内周送りピッチ固定領域(図5の領域A)と外周送りピッチ固定領域(図5の領域C)では、pは一定値に固定して駆動させる。また、d1の大きさも上記pの変化に同期させて、照明スポット3の位置の半径rの1/2乗に概略反比例するように制御する。これにより、送りピッチ制御領域(図5の領域B)での検出感度は前述のように、この領域内でほぼ一定となる。また、内周送りピッチ固定領域(図5の領域A)と外周送りピッチ固定領域(図5の領域C)における検出感度については、第一の実施例と同様であるので、外周送りピッチ固定領域(図5の領域C)において従来技術と同等の検出感度が得られ、それより内周においても外周部と少なくとも同等以上の検出感度が保たれると言うことができる。
【0070】
(3)熱ダメージ
次に、検査中に半導体ウエハ100が受ける熱ダメージについて考える。本実施の形態においては、前述のように照明に用いる照射光21全体の強度は概略一定に保たれ、内周部ほど照明スポット3の面積が大きくなっているため、内周部ほど照明スポット3の照度は減少する。検査中に半導体ウエハ100の表面が受ける熱ダメージは、半導体ウエハ100の外周部で小さく、内周部ほど大きくなることを軽減させることができる。
【0071】
その他の構成は第1の実施の形態と同様である。
【0072】
以上のように構成した本実施の形態においても、半導体ウエハ100における副走査の送りピッチ(並進移動速度)を、半導体ウエハ100の主走査における回転中心から照明スポット3までの距離に応じて制御するよう構成したので、第1の実施の形態と同様に、表面検査における検出感度の低下、及び熱ダメージの増加を抑制しつつ、検査時間を短縮することができる。
【0073】
<第3の実施の形態>
本発明の第3の実施の形態を図6及び図7を参照しつつ説明する。
【0074】
図6は本発明の第3の実施の形態に係る表面検査装置の全体構成を示す概略図である図中、図1に示す部分と同等のものには同じ符号を付し、説明を省略する。本実施の形態の表面検査装置は、第1の実施の形態におけるビーム幅成形光学系14及びビーム幅制御機構16に換えて、ビーム分割機構22及びビーム間隔制御機構23を備え、複数の照明スポット3を半導体ウエハ100上に形成し、その照明スポット3の重複率を、半導体ウエハ100の主走査における回転中心から照明スポット3までの距離が近いほど低く、距離が遠いほど高くなるよう制御するものである。
【0075】
図6において、ビーム分割機構22は、レーザ光を分割し、複数(例えば、4つ)の照射光21を半導体100の表面に照射して複数(例えば、4つ)の照明スポット3を形成する(図7参照)。
【0076】
図7は本発明の第3の実施の形態の被検査物表面における照明スポット群33を示す図である。
【0077】
図7において、縦方向が被検査物移動テーブル102における主走査方向に沿う方向であり、横方向が副走査方向に沿う方向(主走査方向に対して直交する方向)である。
【0078】
各照明スポット3は、それぞれ主走査方向及び副走査方向における中心を基準とし、主走査方向に沿う方向にa、副走査方向に沿う方向にbの間隔を隔てて等間隔に形成される。間隔bは、主走査に伴って4個の照明スポット3が描く軌跡が重複するよう設定される。複数の照明スポット3による軌跡の副走査方向の幅Wが照明スポット群33の有効照明幅となる。表面検査中、間隔aは概略一定に保たれるが、間隔bはビーム間隔制御機構23により、照明スポット群33の中心位置の半径rに概略反比例するように制御される。これにより、有効照明幅Wは半径rに概略反比例して変化させることができる。
【0079】
その他の構成は、第1の実施の形態と同様である。
【0080】
以上のように構成した本実施の形態においても、第1の実施の形態と同様に、表面検査における検出感度の低下、及び熱ダメージの増加を抑制しつつ、検査時間を短縮することができる。
【0081】
なお、本実施例のビーム間隔制御機構23を、間隔bが照明スポット群33の中心位置の半径rの1/2乗に概略反比例するように制御するよう構成すれば、第2の実施の形態における有効照明幅Wを変化させる手段の代替手段として用いることができることは言うまでもない。
【0082】
<第4の実施の形態>
本発明の第4の実施の形態を図8を参照しつつ説明する。
【0083】
図8は本発明の第4の実施の形態に係る表面検査装置の全体構成を示す概略図である図中、図1及び図6に示す部分と同等のものには同じ符号を付し、説明を省略する。本実施の形態の表面検査装置は、第3の実施の形態におけるビーム間隔制御機構23に換えて、ビーム数制御機構24を備え、複数の照明スポット3を半導体ウエハ100上に形成し、その照明スポット3の数を、半導体ウエハ100の主走査における回転中心から照明スポット3までの距離が近いほど多く、距離が遠いほど少なくなるよう制御するものである。
【0084】
図8において、ビーム分割機構22は、レーザ光を分割し、複数(例えば、4つ)の照射光21を半導体100の表面に照射して複数(例えば、4つ)の照明スポット3を形成する(図7参照)。
【0085】
本実施の形態においては、表面検査中、間隔a及び間隔bは概略一定に保たれるが、照明スポット群33を構成する複数の照明スポット3の個数は分割ビーム数制御機構24により、照明スポット群33の中心位置の半径rに概略反比例するように制御される。これにより、有効照明幅Wは半径rに概略反比例して変化させることができる。
【0086】
その他の構成は、第3の実施の形態と同様である。
【0087】
以上のように構成した本実施の形態においても、第1及び第3の実施の形態と同様に、表面検査における検出感度の低下、及び熱ダメージの増加を抑制しつつ、検査時間を短縮することができる。
【0088】
なお、本実施例の分割ビーム数制御機構24を、間隔bが照明スポット群33の中心位置の半径rの1/2乗に概略反比例するように制御するよう構成すれば、第2の実施の形態の有効照明幅Wを変化させる手段の代替手段として用いることができることは言うまでもない。
【符号の説明】
【0089】
1 異物
5 集光レンズ
7 光検出器
11 光源
14 ビーム幅整形光学系
16 ビーム幅制御機構
18 照射レンズ
21 照明光
26 増幅器
30 A/D変換器
40 光量調節機構
41 ビームエキスパンダ
100 半導体ウエハ
101 チャック
102 被検査物移動ステージ
103 回転ステージ
104 並進ステージ
105 Zステージ
106 検査座標検出機構
108 異物・欠陥判定機構
110 照明・検出光学系
120 粒径算出機構
130 異物・欠陥座標検出機構
140 照明・検出制御系
【特許請求の範囲】
【請求項1】
被検査物を主走査として回転移動させ、副走査として並進移動させる披検査物移動手段と、前記被検査物の表面に照明光を照射して、その照明光の照射範囲である照明スポットを形成する照明光照射手段と、前記照明スポットからの散乱・回折・反射光を検出する光検出手段と、前記光検出手段からの検出結果に基づいて前記被検査物の表面上または表面近傍内部に存在する異物を検出する異物検出手段とを備えた表面検査装置を用いる表面検査方法であって、
前記被検査物移動手段における副走査の並進移動速度を、前記被検査物の主走査における回転中心から前記照明スポットまでの距離に応じて制御することを特徴とする表面検査方法。
【請求項2】
請求項1記載の表面検方法において、
前記被検査物移動手段の主走査における回転速度を一定としたことを特徴とする表面検査方法。
【請求項3】
請求項1記載の表面検査方法において、
前記被検査物移動手段における副走査の並進移動速度を、前記被検査物の主走査における回転中心から前記照明スポットまでの距離が近いほど大きく、距離が遠いほど小さくなるよう制御することを特徴とする表面検査方法。
【請求項4】
請求項1記載の表面検査方法において、
前記照明スポットにおける前記主走査方向に直交する方向の径を、前記被検査物の主走査における回転中心から前記照明スポットまでの距離が近いほど大きく、距離が遠いほど小さくなるよう制御することを特徴とする表面検査方法。
【請求項5】
請求項1記載の表面検査方法において、
前記被検査物移動手段における副走査の並進移動速度を、前記被検査物の主走査における回転中心から前記照明スポットまでの距離に概略反比例するよう制御することを特徴とする表面検査方法。
【請求項6】
請求項1記載の表面検査方法において、
前記照明スポットにおける前記主走査方向に直交する方向の径を、前記被検査物の主走査における回転中心から前記照明スポットまでの距離に概略反比例するよう制御することを特徴とする表面検査方法。
【請求項7】
請求項1記載の表面検査方法において、
前記被検査物移動手段における副走査の並進移動速度を、前記被検査物の主走査における回転中心から前記照明スポットまでの距離の1/2乗に概略反比例するよう制御することを特徴とする表面検査方法。
【請求項8】
請求項1記載の表面検査方法において、
前記照明スポットにおける前記主走査方向に直交する方向の径を、前記被検査物の主走査における回転中心から前記照明スポットまでの距離の1/2乗に概略反比例するよう制御することを特徴とする表面検査方法。
【請求項9】
請求項1記載の表面検査方法において、
前記照明スポットは楕円形状であることを特徴とする表面検査方法。
【請求項10】
請求項1記載の表面検査方法において、
前記照明スポットは、前記被検査物の主走査により該照明スポットにより走査される前記被検査物表面の軌跡の少なくとも一部が重複するように配置された複数の照明スポットから成り、前記複数の照明スポットの数を、前記被検査物の主走査における回転中心から前記照明スポットまでの距離が近いほど多く、距離が遠いほど少なくなるよう制御することを特徴とする表面検査方法。
【請求項11】
請求項1記載の表面検査方法において、
前記照明スポットは、前記被検査物の主走査方向に直行する方向にずらして配置され、かつ、前記主走査により各照明スポットにより走査される前記被検査物表面の軌跡の少なくとも一部が重複するように配置された複数の照明スポットから成り、前記複数の照明スポットの重複する比率を、前記被検査物の主走査における回転中心から前記照明スポットまでの距離が近いほど小さく、距離が遠いほど大きくなるよう制御することを特徴とする表面検査方法。
【請求項12】
被検査物を主走査として回転移動させ、副走査として並進移動させる披検査物移動手段と、前記被検査物の表面に照明光を照射して、その照明光の照射範囲である照明スポットを形成する照明光照射手段と、前記照明スポットからの散乱・回折・反射光を検出する光検出手段と、前記光検出手段からの検出結果に基づいて前記被検査物の表面上または表面近傍内部に存在する異物を検出する異物検出手段とを備えた表面検査装置を用いる表面検査方法であって、
前記被検査物が前記主走査より1回転する間に前記照明スポットにより走査される前記被検査物の面積が略一定となるように制御することを特徴とすることを特徴とする表面検査方法。
【請求項13】
請求項12記載の表面検方法において、
前記被検査物移動手段の主走査における回転速度を一定としたことを特徴とする表面検査方法。
【請求項14】
被検査物を主走査として回転移動させ、副走査として並進移動させる披検査物移動手段と、前記被検査物の表面に照明光を照射して、その照明光の照射範囲である照明スポットを形成する照明光照射手段と、前記照明スポットからの散乱・回折・反射光を検出する光検出手段と、前記光検出手段からの検出結果に基づいて前記被検査物の表面上または表面近傍内部に存在する異物を検出する異物検出手段とを備えた表面検査装置を用いる表面検査方法であって、
前記光検出手段からの検出結果のデータ量が、前記被検査物の単位面積あたり略一定となるように制御することを特徴とすることを特徴とする表面検査方法。
【請求項15】
請求項14記載の表面検方法において、
前記被検査物移動手段の主走査における回転速度を一定としたことを特徴とする表面検査方法。
【請求項16】
被検査物を主走査として回転移動させ、副走査として並進移動させる披検査物移動手段と、
前記被検査物の表面に照明光を照射して、その照明光の照射範囲である照明スポットを形成する照明光照射手段と、
前記照明スポットからの散乱・回折・反射光を検出する光検出手段と、
前記光検出手段からの検出結果に基づいて前記被検査物の表面上または表面近傍内部に存在する異物を検出する異物検出手段と、
前記被検査物移動手段における副走査の並進移動速度を、前記被検査物の主走査における回転中心から前記照明スポットまでの距離に応じて制御する手段と
を備えたことを特徴とする表面検査装置。
【請求項17】
被検査物を主走査として回転移動させ、副走査として並進移動させる披検査物移動手段と、
前記被検査物の表面に照明光を照射して、その照明光の照射範囲である照明スポットを形成する照明光照射手段と、
前記照明スポットからの散乱・回折・反射光を検出する光検出手段と、
前記光検出手段からの検出結果に基づいて前記被検査物の表面上または表面近傍内部に存在する異物を検出する異物検出手段と、
前記被検査物が前記主走査より1回転する間に前記照明スポットにより走査される前記被検査物の面積が略一定となるように制御する手段と
を備えたことを特徴とする表面検査装置。
【請求項18】
被検査物を主走査として回転移動させ、副走査として並進移動させる披検査物移動手段と、
前記被検査物の表面に照明光を照射して、その照明光の照射範囲である照明スポットを形成する照明光照射手段と、
前記照明スポットからの散乱・回折・反射光を検出する光検出手段と、
前記光検出手段からの検出結果に基づいて前記被検査物の表面上または表面近傍内部に存在する異物を検出する異物検出手段と、
前記光検出手段からの検出結果のデータ量が、前記被検査物の単位面積あたり略一定となるように制御する手段と
を備えたことを特徴とする表面検査装置。
【請求項19】
請求項16記載の表面検装置において、
前記被検査物移動手段の主走査における回転速度を一定とし、
前記被検査物移動手段における副走査の並進移動速度を、前記被検査物の主走査における回転中心から前記照明スポットまでの距離が近いほど大きく、距離が遠いほど小さくなるよう制御する手段と、
前記照明スポットにおける前記主走査方向に直交する方向の径を、前記被検査物の主走査における回転中心から前記照明スポットまでの距離が近いほど大きく、距離が遠いほど小さくなるよう制御する手段と
を備えたことを特徴とする表面検査装置。
【請求項20】
請求項16記載の表面検査装置において、
前記被検査物移動手段の主走査における回転速度を一定とし、
前記被検査物移動手段における副走査の並進移動速度を、前記被検査物の主走査における回転中心から前記照明スポットまでの距離に概略反比例するよう制御する手段と、
前記照明スポットにおける前記主走査方向に直交する方向の径を、前記被検査物の主走査における回転中心から前記照明スポットまでの距離に概略反比例するよう制御する手段と
を備えたことを特徴とする表面検査装置。
【請求項21】
請求項16記載の表面検査方法において、
前記被検査物移動手段の主走査における回転速度を一定とし、
前記被検査物移動手段における副走査の並進移動速度を、前記被検査物の主走査における回転中心から前記照明スポットまでの距離の1/2乗に概略反比例するよう制御する手段と、
前記照明スポットにおける前記主走査方向に直交する方向の径を、前記被検査物の主走査における回転中心から前記照明スポットまでの距離の1/2乗に概略反比例するよう制御する手段と
を備えたことを特徴とする表面検査装置。
【請求項1】
被検査物を主走査として回転移動させ、副走査として並進移動させる披検査物移動手段と、前記被検査物の表面に照明光を照射して、その照明光の照射範囲である照明スポットを形成する照明光照射手段と、前記照明スポットからの散乱・回折・反射光を検出する光検出手段と、前記光検出手段からの検出結果に基づいて前記被検査物の表面上または表面近傍内部に存在する異物を検出する異物検出手段とを備えた表面検査装置を用いる表面検査方法であって、
前記被検査物移動手段における副走査の並進移動速度を、前記被検査物の主走査における回転中心から前記照明スポットまでの距離に応じて制御することを特徴とする表面検査方法。
【請求項2】
請求項1記載の表面検方法において、
前記被検査物移動手段の主走査における回転速度を一定としたことを特徴とする表面検査方法。
【請求項3】
請求項1記載の表面検査方法において、
前記被検査物移動手段における副走査の並進移動速度を、前記被検査物の主走査における回転中心から前記照明スポットまでの距離が近いほど大きく、距離が遠いほど小さくなるよう制御することを特徴とする表面検査方法。
【請求項4】
請求項1記載の表面検査方法において、
前記照明スポットにおける前記主走査方向に直交する方向の径を、前記被検査物の主走査における回転中心から前記照明スポットまでの距離が近いほど大きく、距離が遠いほど小さくなるよう制御することを特徴とする表面検査方法。
【請求項5】
請求項1記載の表面検査方法において、
前記被検査物移動手段における副走査の並進移動速度を、前記被検査物の主走査における回転中心から前記照明スポットまでの距離に概略反比例するよう制御することを特徴とする表面検査方法。
【請求項6】
請求項1記載の表面検査方法において、
前記照明スポットにおける前記主走査方向に直交する方向の径を、前記被検査物の主走査における回転中心から前記照明スポットまでの距離に概略反比例するよう制御することを特徴とする表面検査方法。
【請求項7】
請求項1記載の表面検査方法において、
前記被検査物移動手段における副走査の並進移動速度を、前記被検査物の主走査における回転中心から前記照明スポットまでの距離の1/2乗に概略反比例するよう制御することを特徴とする表面検査方法。
【請求項8】
請求項1記載の表面検査方法において、
前記照明スポットにおける前記主走査方向に直交する方向の径を、前記被検査物の主走査における回転中心から前記照明スポットまでの距離の1/2乗に概略反比例するよう制御することを特徴とする表面検査方法。
【請求項9】
請求項1記載の表面検査方法において、
前記照明スポットは楕円形状であることを特徴とする表面検査方法。
【請求項10】
請求項1記載の表面検査方法において、
前記照明スポットは、前記被検査物の主走査により該照明スポットにより走査される前記被検査物表面の軌跡の少なくとも一部が重複するように配置された複数の照明スポットから成り、前記複数の照明スポットの数を、前記被検査物の主走査における回転中心から前記照明スポットまでの距離が近いほど多く、距離が遠いほど少なくなるよう制御することを特徴とする表面検査方法。
【請求項11】
請求項1記載の表面検査方法において、
前記照明スポットは、前記被検査物の主走査方向に直行する方向にずらして配置され、かつ、前記主走査により各照明スポットにより走査される前記被検査物表面の軌跡の少なくとも一部が重複するように配置された複数の照明スポットから成り、前記複数の照明スポットの重複する比率を、前記被検査物の主走査における回転中心から前記照明スポットまでの距離が近いほど小さく、距離が遠いほど大きくなるよう制御することを特徴とする表面検査方法。
【請求項12】
被検査物を主走査として回転移動させ、副走査として並進移動させる披検査物移動手段と、前記被検査物の表面に照明光を照射して、その照明光の照射範囲である照明スポットを形成する照明光照射手段と、前記照明スポットからの散乱・回折・反射光を検出する光検出手段と、前記光検出手段からの検出結果に基づいて前記被検査物の表面上または表面近傍内部に存在する異物を検出する異物検出手段とを備えた表面検査装置を用いる表面検査方法であって、
前記被検査物が前記主走査より1回転する間に前記照明スポットにより走査される前記被検査物の面積が略一定となるように制御することを特徴とすることを特徴とする表面検査方法。
【請求項13】
請求項12記載の表面検方法において、
前記被検査物移動手段の主走査における回転速度を一定としたことを特徴とする表面検査方法。
【請求項14】
被検査物を主走査として回転移動させ、副走査として並進移動させる披検査物移動手段と、前記被検査物の表面に照明光を照射して、その照明光の照射範囲である照明スポットを形成する照明光照射手段と、前記照明スポットからの散乱・回折・反射光を検出する光検出手段と、前記光検出手段からの検出結果に基づいて前記被検査物の表面上または表面近傍内部に存在する異物を検出する異物検出手段とを備えた表面検査装置を用いる表面検査方法であって、
前記光検出手段からの検出結果のデータ量が、前記被検査物の単位面積あたり略一定となるように制御することを特徴とすることを特徴とする表面検査方法。
【請求項15】
請求項14記載の表面検方法において、
前記被検査物移動手段の主走査における回転速度を一定としたことを特徴とする表面検査方法。
【請求項16】
被検査物を主走査として回転移動させ、副走査として並進移動させる披検査物移動手段と、
前記被検査物の表面に照明光を照射して、その照明光の照射範囲である照明スポットを形成する照明光照射手段と、
前記照明スポットからの散乱・回折・反射光を検出する光検出手段と、
前記光検出手段からの検出結果に基づいて前記被検査物の表面上または表面近傍内部に存在する異物を検出する異物検出手段と、
前記被検査物移動手段における副走査の並進移動速度を、前記被検査物の主走査における回転中心から前記照明スポットまでの距離に応じて制御する手段と
を備えたことを特徴とする表面検査装置。
【請求項17】
被検査物を主走査として回転移動させ、副走査として並進移動させる披検査物移動手段と、
前記被検査物の表面に照明光を照射して、その照明光の照射範囲である照明スポットを形成する照明光照射手段と、
前記照明スポットからの散乱・回折・反射光を検出する光検出手段と、
前記光検出手段からの検出結果に基づいて前記被検査物の表面上または表面近傍内部に存在する異物を検出する異物検出手段と、
前記被検査物が前記主走査より1回転する間に前記照明スポットにより走査される前記被検査物の面積が略一定となるように制御する手段と
を備えたことを特徴とする表面検査装置。
【請求項18】
被検査物を主走査として回転移動させ、副走査として並進移動させる披検査物移動手段と、
前記被検査物の表面に照明光を照射して、その照明光の照射範囲である照明スポットを形成する照明光照射手段と、
前記照明スポットからの散乱・回折・反射光を検出する光検出手段と、
前記光検出手段からの検出結果に基づいて前記被検査物の表面上または表面近傍内部に存在する異物を検出する異物検出手段と、
前記光検出手段からの検出結果のデータ量が、前記被検査物の単位面積あたり略一定となるように制御する手段と
を備えたことを特徴とする表面検査装置。
【請求項19】
請求項16記載の表面検装置において、
前記被検査物移動手段の主走査における回転速度を一定とし、
前記被検査物移動手段における副走査の並進移動速度を、前記被検査物の主走査における回転中心から前記照明スポットまでの距離が近いほど大きく、距離が遠いほど小さくなるよう制御する手段と、
前記照明スポットにおける前記主走査方向に直交する方向の径を、前記被検査物の主走査における回転中心から前記照明スポットまでの距離が近いほど大きく、距離が遠いほど小さくなるよう制御する手段と
を備えたことを特徴とする表面検査装置。
【請求項20】
請求項16記載の表面検査装置において、
前記被検査物移動手段の主走査における回転速度を一定とし、
前記被検査物移動手段における副走査の並進移動速度を、前記被検査物の主走査における回転中心から前記照明スポットまでの距離に概略反比例するよう制御する手段と、
前記照明スポットにおける前記主走査方向に直交する方向の径を、前記被検査物の主走査における回転中心から前記照明スポットまでの距離に概略反比例するよう制御する手段と
を備えたことを特徴とする表面検査装置。
【請求項21】
請求項16記載の表面検査方法において、
前記被検査物移動手段の主走査における回転速度を一定とし、
前記被検査物移動手段における副走査の並進移動速度を、前記被検査物の主走査における回転中心から前記照明スポットまでの距離の1/2乗に概略反比例するよう制御する手段と、
前記照明スポットにおける前記主走査方向に直交する方向の径を、前記被検査物の主走査における回転中心から前記照明スポットまでの距離の1/2乗に概略反比例するよう制御する手段と
を備えたことを特徴とする表面検査装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2010−210279(P2010−210279A)
【公開日】平成22年9月24日(2010.9.24)
【国際特許分類】
【出願番号】特願2009−53921(P2009−53921)
【出願日】平成21年3月6日(2009.3.6)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
【公開日】平成22年9月24日(2010.9.24)
【国際特許分類】
【出願日】平成21年3月6日(2009.3.6)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
[ Back to top ]