
表面検査装置及び表面検査方法

【課題】物体の表面を撮像して生成される画像に基づいてその表面におけるクラックの有無を判定する表面検査装置を提供すること。
【解決手段】匣鉢の表面を検査する表面検査装置100は、その匣鉢の表面を撮像して処理対象画像を生成する処理対象画像生成部10と、その処理対象画像に対して画像処理を施し、その処理対象画像において所定方向に延びる線状オブジェクトを顕在化させた顕在化画像を生成する顕在化画像生成部11と、その顕在化画像における線状オブジェクトによって形成されるクラック候補の端部位置に基づいてその匣鉢の表面におけるクラックの有無を判定するクラック有無判定部12と、を備える。
【解決手段】匣鉢の表面を検査する表面検査装置100は、その匣鉢の表面を撮像して処理対象画像を生成する処理対象画像生成部10と、その処理対象画像に対して画像処理を施し、その処理対象画像において所定方向に延びる線状オブジェクトを顕在化させた顕在化画像を生成する顕在化画像生成部11と、その顕在化画像における線状オブジェクトによって形成されるクラック候補の端部位置に基づいてその匣鉢の表面におけるクラックの有無を判定するクラック有無判定部12と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、物体の表面を検査する装置及びその検査方法に関し、特に、その物体の表面を撮像して生成される処理対象画像に基づいて物体の表面を検査する表面検査装置及び表面検査方法に関する。
【背景技術】
【0002】
従来、電子工業用の粉体材料を匣鉢と呼ばれる升状の容器に入れ、ローラーコンベア等を用いてその匣鉢をトンネル炉等の連続焼成炉内に搬送し、その匣鉢内の粉体材料を焼成する方法が知られている(例えば、特許文献1参照。)。
【0003】
一般的に、匣鉢は、耐熱性に優れた緻密なセラミックスで形成され、その粉体材料の焼成工程を通じて、加熱され或いは冷却されることとなる。また、その加熱及び冷却の過程において、その匣鉢は、その本体内で局所的な温度差(温度勾配)を生じさせ、機械的な或いは熱的な応力差によるクラックをその表面に発生させる場合がある。なお、そのクラックは、その匣鉢の構造(上面が開放された升状の容器構造)に起因して、その側壁の上縁部から鉛直下方又は斜め下方に向かって延びる傾向がある。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2000−203947号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
クラックを発生させた匣鉢は、受け容れた粉体材料が焼成される際にそのクラックからその粉体材料を漏出させることとなり、製品製造コストを増大させる結果をもたらすこととなる。そのため、クラックを早期に発見することが求められている。
【0006】
上述の点に鑑み、本発明は、物体の表面を撮像して生成される画像に基づいてその表面におけるクラックの有無を判定する表面検査装置及び表面検査方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
上述の目的を達成するために、本発明の実施例に係る表面検査装置は、物体の表面を検査する表面検査装置であって、前記物体の表面を撮像して処理対象画像を生成する処理対象画像生成部と、前記処理対象画像に対して画像処理を施し、前記処理対象画像において所定方向に延びる線状オブジェクトを顕在化させた顕在化画像を生成する顕在化画像生成部と、前記顕在化画像における線状オブジェクトによって形成されるクラック候補の端部位置に基づいて前記物体の表面におけるクラックの有無を判定するクラック有無判定部と、を備えることを特徴とする。
【0008】
また、本発明の実施例に係る表面検査方法は、物体の表面を検査する表面検査方法であって、前記物体の表面を撮像して処理対象画像を生成する処理対象画像生成ステップ、前記処理対象画像に対して画像処理を施し、前記処理対象画像における所定方向に延びる線状オブジェクトを顕在化させた顕在化画像を生成する顕在化画像生成ステップ、前記顕在化画像における線状オブジェクトによって形成されるクラック候補の端部位置に基づいて前記物体の表面におけるクラックの有無を判定するクラック有無判定ステップ、を有することを特徴とする。
【発明の効果】
【0009】
上述の手段により、本発明は、物体の表面を撮像して生成される画像に基づいてその表面におけるクラックの有無を判定する表面検査装置及び表面検査方法を提供することができる。
【図面の簡単な説明】
【0010】
【図1】本発明の実施例に係る表面検査装置の構成例を示すブロック図である。
【図2】線状オブジェクトを顕在化させるための画像処理の内容を説明するための図である。
【図3】処理対象画像、45度線顕在化画像、90度線顕在化画像、135度線顕在化画像、及び線状オブジェクト顕在化画像のそれぞれの違いを示す図である。
【図4】線状オブジェクトとクラック候補との間の関係を説明するための図である。
【図5】表面検査処理の流れを示すフローチャートである。
【発明を実施するための形態】
【0011】
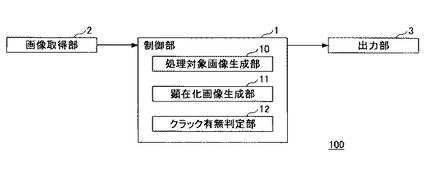
図1は、本発明の実施例に係る表面検査装置100の構成例を示すブロック図であり、表面検査装置100は、例えば、匣鉢の側壁の外表面を検査するための装置であって、その搬送経路の一部がトンネル炉内を通るローラーコンベアのそのトンネル炉外にある搬送経路の側に設置され、主に、制御部1、画像取得部2、及び出力部3を有する。
【0012】
制御部1は、CPU(Central Processing Unit)、RAM(Random Access Memory)、ROM(Read Only Memory)等を備えたコンピュータであって、例えば、処理対象画像生成部10、顕在化画像生成部11、及びクラック有無判定部12のそれぞれに対応するプログラムをROMに記憶し、各プログラムをRAM上に展開しながら各プログラムに対応する処理をCPUに実行させる。なお、処理対象画像生成部10、顕在化画像生成部11、及びクラック有無判定部12のそれぞれは、電子回路等のハードウェアで構成されていてもよい。
【0013】
画像取得部2は、制御部1で処理される画像を取得する装置であり、例えば、CMOS(Complementary Metal Oxide Semiconductor)やCCD(Charge Coupled Device)等の撮像素子を備えたカメラであって、そのカメラの前を通過するようにローラーコンベアによって搬送される匣鉢の側壁の外表面の一部又は全部を撮像し、撮像したその側壁の外表面の画像(以下、「表面画像」とする。)を制御部1に対して出力する。なお、表面画像は、好適には、その匣鉢の側壁の上縁部の画像を含むものとする。
【0014】
出力部3は、各種情報を出力するための装置であり、例えば、制御部1による匣鉢の側壁の外表面におけるクラックの検査結果を表示するためのディスプレイやLED、又は、その検査結果を音声出力するためのスピーカ等である。
【0015】
次に、制御部1が有する各機能要素について説明する。
【0016】
処理対象画像生成部10は、画像取得部2が取得した表面画像から処理対象画像を生成するための機能要素であり、例えば、その表面画像に対してその輝度に基づくグレースケール化処理を施すようにする。この場合、グレースケール化された表面画像の各画素の輝度は、例えば、256階調で表現され、値が大きい程明るいものとする。
【0017】
更に、処理対象画像生成部10は、グレースケール化された表面画像にネガポジ反転処理を施して処理対象画像を生成する。その処理対象画像に対するフィルタ処理(後述)の適用を容易にするためである。この場合、処理対象画像の各画素の輝度は、ネガポジ反転処理前の表面画像と同様に256階調で表現されるが、値が小さい程明るい状態を表すこととなる(具体的には輝度値0、1、・・・、254、255のそれぞれが輝度値255、254、・・・、1、0に変換されることとなる。)。
【0018】
なお、処理対象画像のサイズは、表面画像の全部に対応するものであってもよく、表面画像の一部に対応するものであってもよいが、その匣鉢の側壁の上縁部の画像を含むものとする。
【0019】
また、処理対象画像における単位画素のサイズは、その表面画像における単位画素のサイズと同じであってもよく、その表面画像における複数の単位画素(例えば、縦3画素×横3画素の9画素である。)を一纏めにしたサイズであってもよい。例えば、処理対象画像における単位画素のサイズが表面画像における単位画素の9画素分のサイズに相当する場合、その表面画像における9画素のそれぞれの輝度の統計値(例えば、平均値、最大値、最小値、中間値等である。)又はその9画素の中心画素の輝度がその処理対象画像における単位画素の輝度として採用されるものとする。
【0020】
顕在化画像生成部11は、処理対象画像に対して画像処理を施し、その処理対象画像において所定方向に延びる線状オブジェクトを顕在化させた線状オブジェクト顕在化画像を生成する機能要素である。
【0021】
「線状オブジェクト」は、縦方向、横方向、又は斜め方向に連続する所定数以上の画素によって形成される線状の画素の纏まりであり、直線状のオブジェクト、曲線状のオブジェクト、並びに、直線及び曲線が混在するオブジェクトを含む。
【0022】
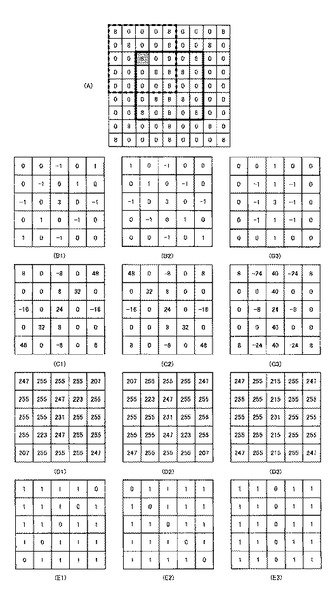
図2は、線状オブジェクトを顕在化させるための画像処理(例えば、フィルタ処理、二回目のネガポジ反転処理及び二値化処理である。)の内容を説明するための図であり、図2(A)が処理対象画像を示し、図2(B1)〜図2(B3)がそのフィルタ処理に用いるフィルタを示し、図2(C1)〜(C3)がフィルタ処理後の処理対象画像の一部を示し、図2(D1)〜(D3)がフィルタ処理及び二回目のネガポジ反転処理を施した後の処理対象画像の一部を示し、図2(E1)〜(E3)がフィルタ処理、二回目のネガポジ反転処理、及び二値化処理を施した後の処理対象画像の一部を示す。なお、図2(A)及び図2(C1)〜(C3)内の数字は、一回目のネガポジ反転処理を施した後の各画素の輝度(すなわち、値が小さい程明るい)を示すものとし、図2(D1)〜(D3)及び図2(E1)〜(E3)内の数字は、二回目のネガポジ反転処理を施した後の各画素の輝度(すなわち、値が大きい程明るい)を示すものとする。
【0023】
図2(A)は、縦9画素、横9画素の大きさの処理対象画像であり、この処理対象画像は、輝度「8」の中心画素(第5行、第5列の画素であり、以下、「画素(5,5)」のように表現される。他の画素も同様に表現されるものとする。)を通って上下方向(90度の方向)に並ぶ輝度「8」の画素群(5,1)〜(5,9)と、中心画素(5,5)を通って45度の方向に並ぶ輝度「8」の画素群(1,9)、(2,8)、(3,7)、(4,6)、(6,4)、(7,3)、(8,2)、(9,1)と、中心画素(5,5)を通って135度の方向に並ぶ輝度「8」の画素群(1,1)、(2,2)、(3,3)、(4,4)、(5,5)、(6,6)、(7,7)、(8,8)、(9,9)とを含むものとする。
【0024】
最初に、顕在化画像生成部11は、図2(A)における灰色で塗り潰された画素(3,3)を注目画素とし、図2(B1)のフィルタを適用して、その注目画素のフィルタ処理後の輝度を算出する。
【0025】
図2(B1)は、45度の方向に延びる線状オブジェクトを強調するための縦5×横5のフィルタ(行列)であり、中心座標(3,3)の値を「3」とし、その中心座標(3,3)を通って45度の方向に並ぶ座標群(1,5)、(2,4)、(4,2)、(5,1)のそれぞれの値を「1」とし、これら座標群に平行に45度の方向に並ぶ座標群(1,3)、(2,2)、(3,1)、(3,5)、(4,4)、(5,3)の値を「−1」とする。以下、このフィルタを「45度線強調フィルタ」と称する。
【0026】
ここで、顕在化画像生成部11は、図2(A)の破線で囲まれた縦5画素、横5画素の大きさを有する処理対象画像の一部を行列Mと見立て、その行列Mの各成分と45度線強調フィルタ(行列)の対応する各成分との積のそれぞれを加算した値((8×0)+(0×0)+(0×(−1))+(0×0)+(8×1)+(0×0)+(8×(−1))+(0×0)+(0×1)+(8×0)+(0×(−1))+(0×0)+(8×3)+(0×0)+(8×(−1))+(0×0)+(0×1)+(0×0)+(8×(−1))+(8×0)+(0×1)+(0×0)+(0×(−1))+(0×0)+(8×0)=「8」)を、図2(A)の注目画素(3,3)のフィルタ処理後の輝度として算出する。
【0027】
その後、顕在化画像生成部11は、注目画素の位置を変えながら処理対象画像における他の画素群のそれぞれのフィルタ処理後の輝度を同様に算出する。
【0028】
図2(C1)は、このようにして算出されるフィルタ処理後の輝度で書き換えられた処理対象画像の一部(画像部分)を示し、その画像部分は、図2(A)の太線で囲まれた縦5画素、横5画素の大きさを有する画像部分に対応する。例えば、図2(A)の注目画素(3,3)は、図2(C1)の左上隅の画素に対応し、図2(A)の画素(7,7)は、図2(C1)の右下隅の画素に対応する。
【0029】
また、図2(D1)は、45度線強調フィルタを用いたフィルタ処理後の処理対象画像に二回目のネガポジ反転処理を施した後の処理対象画像の一部(画像部分)を示し、その画像部分は、図2(C1)で示される画像部分と同様、図2(A)の太線で囲まれた縦5画素、横5画素の大きさを有する画像部分に対応する。
【0030】
この二回目のネガポジ反転処理は、一回目のネガポジ反転処理とは反対に、例えば、輝度値255、254、・・・、1、0のそれぞれを輝度値0、1、・・・、254、255に変換する。なお、この二回目のネガポジ反転処理は、値255を超える輝度値を値255に制限するものとする(図2(C1)におけるマイナスの値を値0として扱うことを意味する。)。
【0031】
また、図2(E1)は、輝度閾値「245」を用いて、二回目のネガポジ反転処理を施した後の処理対象画像を二値化した後の処理対象画像の一部(画像部分)を示し、その画像部分は、図2(C1)及び図2(D1)で示される画像部分と同様、図2(A)の太線で囲まれた縦5画素、横5画素の大きさを有する画像部分に対応する。
【0032】
このように、図2(B1)の45度線強調フィルタは、図2(C1)で示されるように、45度の方向に並ぶ画素群の輝度を選択的に増大させ(図2(D1)では45度の方向に並ぶ画素群の輝度を選択的に低減させることとなる。)、また、図2(E1)で示されるように、適切な輝度閾値(この場合、「245」である。)を用いた二値化処理との組み合わせにより、45度の方向に並ぶ画素群を選択的に顕在化させる機能を果たす。
【0033】
このようにして、顕在化画像生成部11は、処理対象画像における45度の方向に並ぶ画素群で形成された線状オブジェクトを選択的に顕在化させた45度線顕在化画像を生成することができる。
【0034】
また、顕在化画像生成部11は、45度線強調フィルタ以外の他のフィルタを用いて他の方向に延びる線状オブジェクトを顕在化させるようにする。
【0035】
例えば、顕在化画像生成部11は、図2(A)の処理対象画像に対し、図2(B2)のフィルタを適用して、その処理対象画像における画素群のそれぞれのフィルタ処理後の輝度を算出する。
【0036】
図2(B2)は、135度の方向に延びる線状オブジェクトを強調するための縦5×横5のフィルタ(行列)であり、中心座標(3,3)の値を「3」とし、その中心座標(3,3)を通って135度の方向に並ぶ座標群(1,1)、(2,2)、(4,4)、(5,5)のそれぞれの値を「1」とし、これら座標群に平行に135度の方向に並ぶ座標群(1,3)、(2,4)、(3,1)、(3,5)、(4,2)、(5,3)の値を「−1」とする。以下、このフィルタを「135度線強調フィルタ」と称する。
【0037】
図2(C2)は、135度線強調フィルタを用いたフィルタ処理後の処理対象画像の一部(画像部分)を示し、その画像部分は、図2(A)の太線で囲まれた縦5画素、横5画素の大きさを有する画像部分に対応する。
【0038】
また、図2(D2)は、135度線強調フィルタを用いたフィルタ処理後の処理対象画像に二回目のネガポジ反転処理を施した後の処理対象画像の一部(画像部分)を示し、その画像部分は、図2(C2)で示される画像部分と同様、図2(A)の太線で囲まれた縦5画素、横5画素の大きさを有する画像部分に対応する。
【0039】
また、図2(E2)は、輝度閾値「245」を用いて、二回目のネガポジ反転処理を施した後の処理対象画像を二値化した後の処理対象画像の一部(画像部分)を示し、その画像部分は、図2(C2)及び図2(D2)で示される画像部分と同様、図2(A)の太線で囲まれた縦5画素、横5画素の大きさを有する画像部分に対応する。
【0040】
このように、図2(B2)の135度線強調フィルタは、図2(C2)で示されるように、135度の方向に並ぶ画素群の輝度を選択的に増大させ(図2(D2)では135度の方向に並ぶ画素群の輝度を選択的に低減させることとなる。)、また、図2(E2)で示されるように、適切な輝度閾値(この場合、「245」である。)を用いた二値化処理との組み合わせにより、135度の方向に並ぶ画素群を選択的に顕在化させる機能を果たす。
【0041】
このようにして、顕在化画像生成部11は、処理対象画像における135度の方向に並ぶ画素群で形成された線状オブジェクトを選択的に顕在化させた135度線顕在化画像を生成することができる。
【0042】
更に、顕在化画像生成部11は、45度線強調フィルタ及び135度線強調フィルタ以外の他のフィルタを用いて他の方向に延びる線状オブジェクトを顕在化させるようにする。
【0043】
例えば、顕在化画像生成部11は、図2(A)の処理対象画像に対して、図2(B3)のフィルタを適用して、その処理対象画像における画素群のそれぞれのフィルタ処理後の輝度を算出する。
【0044】
図2(B3)は、上下方向に延びる線状オブジェクトを強調するための縦5×横5のフィルタ(行列)であり、中心座標(3,3)の値を「3」とし、その中心座標(3,3)を通って上下方向(90度の方向)に並ぶ座標群(1,3)、(2,3)、(4,3)、(5,3)のそれぞれの値を「1」とし、これら座標群に平行に上下方向に並ぶ座標群(2,2)、(2,4)、(3,2)、(3,4)、(4,2)、(4,4)の値を「−1」とする。以下、このフィルタを「90度線強調フィルタ」と称する。
【0045】
図2(C3)は、90度線強調フィルタを用いたフィルタ処理後の処理対象画像の一部(画像部分)を示し、その画像部分は、図2(A)の太線で囲まれた縦5画素、横5画素の大きさを有する画像部分に対応する。
【0046】
また、図2(D3)は、90度線強調フィルタを用いたフィルタ処理後の処理対象画像に二回目のネガポジ反転処理を施した後の処理対象画像の一部(画像部分)を示し、その画像部分は、図2(C3)で示される画像部分と同様、図2(A)の太線で囲まれた縦5画素、横5画素の大きさを有する画像部分に対応する。
【0047】
また、図2(E3)は、輝度閾値「245」を用いて、二回目のネガポジ反転処理を施した後の処理対象画像を二値化した後の処理対象画像の一部(画像部分)を示し、その画像部分は、図2(C3)及び図2(D3)で示される画像部分と同様、図2(A)の太線で囲まれた縦5画素、横5画素の大きさを有する画像部分に対応する。
【0048】
このように、図2(B3)の90度線強調フィルタは、図2(C3)で示されるように、上下方向に並ぶ画素群の輝度を選択的に増大させ(図2(D3)では90度の方向に並ぶ画素群の輝度を選択的に低減させることとなる。)、また、図2(E3)で示されるように、適切な輝度閾値(この場合、「245」である。)を用いた二値化処理との組み合わせにより、上下方向に並ぶ画素群を選択的に顕在化させる機能を果たす。
【0049】
このようにして、顕在化画像生成部11は、処理対象画像における上下方向に並ぶ画素群で形成された線状オブジェクトを選択的に顕在化させた90度線顕在化画像を生成することができる。
【0050】
その後、顕在化画像生成部11は、45度線強調フィルタ、90度線強調フィルタ、及び135度線強調フィルタのそれぞれを用いて生成された45度線顕在化画像、90度線顕在化画像、及び135度線顕在化画像のそれぞれを重ね合わせて一つの最終的な線状オブジェクト顕在化画像を生成する。
【0051】
なお、顕在化画像生成部11は、45度線強調フィルタ、90度線強調フィルタ、及び135度線強調フィルタのうちの何れか一つを用いて単一の顕在化画像を生成し、その単一の顕在化画像をそのまま最終的な線状オブジェクト顕在化画像としてもよく、45度線強調フィルタ、90度線強調フィルタ、及び135度線強調フィルタのうちの何れか二つを用いて二つの顕在化画像を生成し、それら二つの顕在化画像を重ね合わせて一つの最終的な線状オブジェクト顕在化画像を生成するようにしてもよい。
【0052】
また、顕在化画像生成部11は、45度、90度及び135度以外の他の方向に延びる線状オブジェクトを強調するためのフィルタを用いて顕在化画像を生成するようにしてもよく、四つ以上のフィルタを用いて生成された四つ以上の顕在化画像のそれぞれを重ね合わせて一つの最終的な線状オブジェクト顕在化画像を生成するようにしてもよい。
【0053】
また、顕在化画像生成部11は、二値化処理を施した45度線顕在化画像、135度線顕在化画像、及び90度線顕在化画像を重ね合わせて線状オブジェクト顕在化画像を生成するが、二値化処理を施す前の45度線顕在化画像、135度線顕在化画像、及び90度線顕在化画像を重ね合わせた後に二値化処理を施して線状オブジェクト顕在化画像を生成するようにしてもよい。
【0054】
また、45度線強調フィルタ、90度線強調フィルタ、及び135度線強調フィルタは、それぞれ、縦5×横5の行列で表現されているが、縦7×横7の行列、縦9×横9の行列、又は、縦11×横11の行列等の他の行列で表現されてもよく、また、行列の成分(各座標の値)を、所望の強調度合いに応じて任意に設定できるものとする。
【0055】
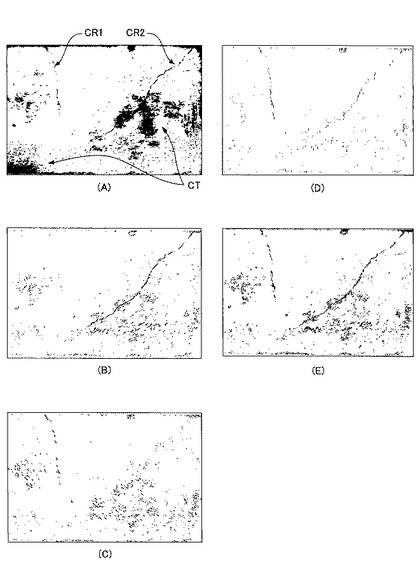
図3は、処理対象画像、45度線顕在化画像、90度線顕在化画像、135度線顕在化画像、及び線状オブジェクト顕在化画像のそれぞれの違いを示す図であり、図3(A)が処理対象画像を示し、図3(B)が45度線顕在化画像を示し、図3(C)が135度線顕在化画像を示し、図3(D)が90度線顕在化画像を示し、図3(E)が線状オブジェクト顕在化画像を示す。
【0056】
具体的には、図3(A)の処理対象画像は、多くの汚れCTが付着した匣鉢の側壁の外表面に二つのクラックCR1、CR2が発生した状態を示し、その上縁がその匣鉢の側壁の上縁部に対応する。
【0057】
また、図3(B)の45度線顕在化画像は、略45度の方向に延びるクラックCR2を顕著に顕在化させ、略110度の方向に延びるクラックCR1及び汚れCTをほぼ消失させた状態を示す。
【0058】
また、図3(C)の135度線顕在化画像は、略110度の方向に延びるクラックCR1を僅かに顕在化させ、略45度の方向に延びるクラックCR2及び汚れCTをほぼ消失させた状態を示す。
【0059】
また、図3(D)の90度線顕在化画像は、略110度の方向に延びるクラックCR1を僅かに顕在化させ、略45度の方向に延びるクラックCR2及び汚れCTをほぼ消失させた状態を示す。
【0060】
また、図3(E)の線形オブジェクト顕在化画像は、図3(B)の45度線顕在化画像、図3(C)の135度線顕在化画像、及び図3(D)の90度線顕在化画像を重ね合わせた画像であり、略110度の方向に延びるクラックCR1と、略45度の方向に延びるクラックCR2とを顕在化させ、汚れCTをほぼ消失させた状態を示す。
【0061】
このように、顕在化画像生成部11は、匣鉢の側壁で発生するクラックがその匣鉢の側壁の上縁部から鉛直下方又は斜め下方に向かって延びるという傾向を利用して(すなわち、45度線強調フィルタ、90度線強調フィルタ、及び135度線強調フィルタを利用して)、クラックCR1、CR2と汚れCTとが混在した匣鉢の側壁の外表面を表す処理対象画像から、クラックCR1、CR2を顕在化させ且つ汚れCTをほぼ消失させた線状オブジェクト顕在化画像を生成することができる。
【0062】
クラック有無判定部12は、顕在化画像生成部11が生成した線状オブジェクト顕在化画像における線状オブジェクト(例えば、線状オブジェクト顕在化画像における二値化処理後の輝度「0」の画素によって形成されるオブジェクトである。)によって形成されるクラック候補の端部位置に基づいて匣鉢の側壁の外表面におけるクラックの有無を判定する機能要素である。
【0063】
具体的には、クラック有無判定部12は、例えば、所定数以上の画素群で形成される線状オブジェクトの最大フェレ径及び最小フェレ径の一方である第一フェレ径と、その第一フェレ径の方向に垂直な方向におけるフェレ径である第二フェレ径とに基づいてクラック候補を設定する。
【0064】
「フェレ径」は、線状オブジェクトを二本の平行線で挟んだときのそれら二本の平行線の間の距離であり、「最大フェレ径」は、その線状オブジェクトに関するフェレ径のうち最も値が大きいものを意味し、「最小フェレ径」は、その線状オブジェクトに関するフェレ径のうち最も値が小さいものを意味する。
【0065】
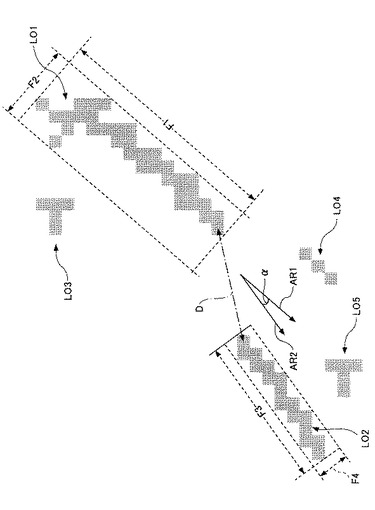
ここで、図4を参照しながら、線状オブジェクトとクラック候補との間の関係について説明する。
【0066】
図4は、線状オブジェクト顕在化画像の一部を示す図であり、五つの線状オブジェクトLO1〜LO5を含む。
【0067】
クラック有無判定部12は、それら五つの線状オブジェクトLO1〜LO5のうち、所定数以上の画素群で形成される線状オブジェクトLO1、LO2を、フェレ径を導出する対象として抽出する。一定の大きさを有する線状オブジェクトのみをクラックであると判定できるようにするためであり、一定の大きさを持たない線状オブジェクトを判定対象から除外することにより無駄な演算を省略できるようにするためである。但し、クラック有無判定部12は、線状オブジェクト顕在化画像における全ての線状オブジェクトを判定対象としてもよい。
【0068】
その後、クラック有無判定部12は、線状オブジェクトLO1の最大フェレ径F1を導き出し、その最大フェレ径F1が所定値以上であれば、その最大フェレ径F1の方向に垂直な方向におけるフェレ径F2を導き出した上で、フェレ径比(最大フェレ径F1をフェレ径F2で除した値である。)を算出し、そのフェレ径比が所定値以上であれば、線状オブジェクトLO1をクラック候補として設定する。一定の細長さを有する線状オブジェクトのみをクラックであると判定できるようにするためである。
【0069】
同様に、クラック有無判定部12は、線状オブジェクトLO2の最大フェレ径F3を導き出し、その最大フェレ径F3が所定値以上であれば、その最大フェレ径F3の方向に垂直な方向におけるフェレ径F4を導き出した上で、フェレ径比(最大フェレ径F3をフェレ径F4で除した値である。)を算出し、そのフェレ径比が所定値以上であれば、線状オブジェクトLO2をクラック候補として設定する。
【0070】
なお、クラック有無判定部12は、最大フェレ径の方向に垂直な方向におけるフェレ径を導出する代わりに最小フェレ径を導出した上で、フェレ径比(最大フェレ径を最小フェレ径で除した値である。)を算出するようにしてもよい。これは、最小フェレ径の方向が最大フェレ径の方向に対してほぼ垂直となる場合が多いという考えに基づくものであり、最大フェレ径の方向に垂直な方向におけるフェレ径を導出する処理を省略して演算負荷を低減させることができる。
【0071】
また、クラック有無判定部12は、最初に線状オブジェクトの最小フェレ径とその最小フェレ径の方向に垂直な方向におけるフェレ径とを導き出した上で、フェレ径比(その垂直な方向におけるフェレ径を最小フェレ径で除した値である。)を算出し、そのフェレ径比が所定値以上である場合に、その線状オブジェクトをクラック候補として設定するようにしてもよい。
【0072】
なお、この場合においても、クラック有無判定部12は、最小フェレ径の方向に垂直な方向におけるフェレ径を導出する代わりに最大フェレ径を導出した上で、フェレ径比(最大フェレ径を最小フェレ径で除した値である。)を算出するようにしてもよい。
【0073】
その後、クラック有無判定部12は、線状オブジェクト顕在化画像における、その設定したクラック候補(線状オブジェクト)の上端とその匣鉢の側壁の上縁部との間の距離を導き出し、その導き出した距離が所定値(例えば、その匣鉢の側壁の高さの20%である。)未満の場合に、そのクラック候補がクラックであると判定する。この判定は、匣鉢の側壁の外表面に発生するクラックがその匣鉢の側壁の上縁部から始まるという見解に基づくものである。
【0074】
なお、線状オブジェクト顕在化画像におけるその匣鉢の側壁の上縁部の位置は、画像取得部2の設置位置を調節することによって、その線状オブジェクト顕在化画像の上縁と一致するように設定されており、クラック候補の上端とその匣鉢の側壁の上縁部との間の距離は、クラック候補の上端からその線状オブジェクト顕在化画像の上縁までの距離に相当するものとする。但し、線状オブジェクト顕在化画像におけるその匣鉢の側壁の上縁部の位置は、各種画像処理によってその都度導き出されるものであってもよい。
【0075】
その後、クラック有無判定部12は、その匣鉢の側壁の外表面にクラックが存在すると判定した場合に、出力部3に対して制御信号を送信し、クラックが存在すること、及び、そのクラックに関する情報(例えば、クラックの深さ(匣鉢の側壁の上縁部からそのクラックの下端までの距離)やクラックの長さである。)をディスプレイ上に表示させ或いはスピーカから音声出力させる。
【0076】
また、クラック有無判定部12は、所定の位置関係にある二つのクラック候補を一つのクラック候補グループに纏めるようにしてもよく、例えば、二つのクラック候補のそれぞれの端点の間の距離が所定値未満であり、且つ、それら二つのクラック候補のそれぞれの延在方向の間の角度が所定値未満である場合に、それら二つのクラック候補を一つのクラック候補グループに纏めるようにする。
【0077】
具体的には、クラック有無判定部12は、図4で示されるように、既にクラック候補として設定された線状オブジェクトLO1の下端部にある画素と、既にクラック候補として設定された線状オブジェクトLO2の上端部にある画素との間の距離Dを導き出し、その距離Dが所定値(例えば、10ミリメートルである。)未満であるか否かを判定する。
【0078】
その後、クラック有無判定部12は、その距離Dが所定値未満であれば、図4の矢印AR1で示される線状オブジェクト(クラック候補)LO1の延在方向(最大フェレ径F1の方向)と、図4の矢印AR2で示される線状オブジェクトLO2(クラック候補)の延在方向(最大フェレ径F3の方向)との間に形成される角度αが所定値(例えば、45度である。)未満であるか否かを判定する。
【0079】
その後、クラック有無判定部12は、その角度αが所定値未満であれば、線状オブジェクト(クラック候補)LO1と線状オブジェクト(クラック候補)LO2とが同じクラックに属するものであると推定して、一つのクラック候補グループに纏めるようにラベリングする。
【0080】
これにより、クラック有無判定部12は、そのクラック候補グループに含まれる線状オブジェクト(クラック候補)LO1、LO2のうち、その匣鉢の側壁の上縁部に最も近い線状オブジェクト(クラック候補)である線状オブジェクト(クラック候補)LO1の上端とその匣鉢の側壁の上縁部との間の距離を導き出し、その導き出した距離が所定値(例えば、その匣鉢の側壁の高さの20%である。)未満の場合に、そのクラック候補グループに含まれる全ての線状オブジェクト(クラック候補)LO1、LO2が同じ一つのクラックを構成するものであると判定する。
【0081】
その結果、クラック有無判定部12は、線状オブジェクト(クラック候補)LO2の上端とその匣鉢の側壁の上縁部との間の距離の導出を省略することができ、その処理に関する負荷を低減させることができる。
【0082】
また、クラック有無判定部12は、途切れ途切れの不連続な状態で撮像された線状オブジェクト顕在化画像におけるクラックを複数のクラック候補に分断された状態で認識している場合であっても、それら複数のクラック候補を一つのクラック候補グループに纏めることができ、その匣鉢の側壁の外表面にあるクラックの本数やそのクラックの深さをより正確に認識することができる。
【0083】
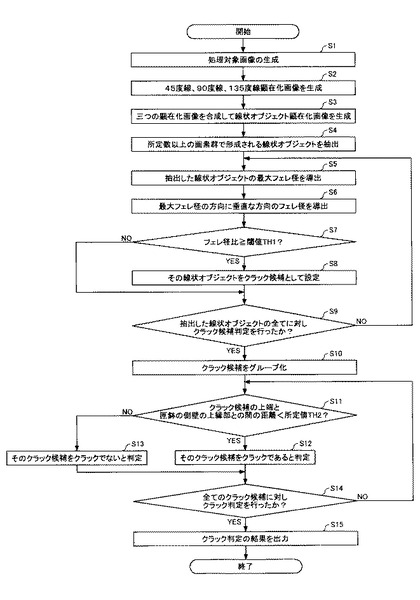
次に、図5を参照しながら、表面検査装置100が匣鉢の側壁の外表面にクラックが存在するか否かを検査する処理(以下、「表面検査処理」とする。)の流れについて説明する。なお、図5は、その表面検査処理の流れを示すフローチャートであり、表面検査装置100は、画像取得部2から表面画像を取得する毎にこの表面検査処理を実行するものとする。
【0084】
最初に、表面検査装置100の制御部1は、処理対象画像生成部10により、画像取得部2が取得した表面画像から処理対象画像を生成する(ステップS1)。
【0085】
その後、制御部1は、顕在化画像生成部11により、処理対象画像に対し、45度線強調フィルタ(図2(B1)参照。)、90度線強調フィルタ(図2(B3)参照。)、及び135度線強調フィルタ(図2(B2)参照。)をそれぞれ個別に適用した上で、所定の輝度閾値を用いて二値化し、45度線顕在化画像(図3(B)参照。)、90度線顕在化画像(図3(D)参照。)、及び135度線顕在化画像(図3(C)参照。)を個別に生成する(ステップS2)。
【0086】
その後、制御部1は、顕在化画像生成部11により、それら三つの顕在化画像を重ね合わせて合成し、線状オブジェクト顕在化画像(図3(E)参照。)を生成する(ステップS3)。
【0087】
その後、制御部1は、クラック有無判定部12により、その線状オブジェクト顕在化画像における、所定数以上の画素群で形成される線状オブジェクトを、以降の処理の対象として抽出する(ステップS4)。
【0088】
その後、制御部1は、クラック有無判定部12により、抽出した複数の線状オブジェクトのうちの一つの最大フェレ径を導き出し(ステップS5)、その最大フェレ径が所定値以上であれば、その最大フェレ径の方向に垂直な方向におけるフェレ径を導き出すようにする(ステップS6)。
【0089】
その後、制御部1は、クラック有無判定部12により、フェレ径比(最大フェレ径をその垂直なフェレ径で除した値である。)を算出し、そのフェレ径比と所定の閾値TH1とを比較する(ステップS7)。以下、この比較処理を「クラック候補判定」とする。
【0090】
そのフェレ径比が閾値TH1以上である場合(ステップS7のYES)、制御部1は、クラック有無判定部12により、その線状オブジェクトをクラック候補として設定する(ステップS8)。
【0091】
一方、そのフェレ径比が閾値TH1未満である場合(ステップS7のNO)、制御部1は、その線状オブジェクトをクラック候補として設定することなく、ステップS9の処理に移行する。
【0092】
その後、制御部1は、クラック有無判定部12により、ステップS4で抽出した線状オブジェクトの全てに対してクラック候補判定を行ったか否かを判断し(ステップS9)、ステップS4で抽出した線状オブジェクトの一部に対して未だクラック候補判定を行っていないと判断した場合には(ステップS9のNO)、ステップS5〜ステップS9の処理を再度実行するようにする。
【0093】
一方、ステップS4で抽出した線状オブジェクトの全てに対してクラック候補判定を行ったと判断した場合(ステップS9のYES)、制御部1は、クラック有無判定部12により、ステップS8で設定された複数のクラック候補を一又は複数のクラック候補グループにグループ化する(ステップS10)。
【0094】
具体的には、制御部1は、クラック有無判定部12により、隣り合う二つのクラック候補(線状オブジェクト)の間の距離が所定値未満であり、且つ、それら二つのクラック候補のそれぞれの延在方向の間に形成される角度が所定値未満であれば、それら二つのクラック候補が同じクラック候補グループに属するものとしてラベリングする。
【0095】
その後、制御部1は、クラック有無判定部12により、ステップS8で設定された複数のクラック候補のうちの一つのクラック候補の上端と匣鉢の側壁の上端部との間の距離を、所定の閾値TH2と比較する(ステップS11)。以下、この比較処理を「クラック判定」とする。
【0096】
その距離が所定の閾値TH2未満であると判断した場合(ステップS11のYES)、制御部1は、クラック有無判定部12により、そのクラック候補がクラックであると判定する(ステップS12)。
【0097】
一方、その距離が所定の閾値TH2以上であると判断した場合(ステップS11のNO)、制御部1は、そのクラック候補がクラック候補でないと判定する(ステップS13)。
【0098】
なお、その一つのクラック候補がクラック候補グループに属するものである場合、制御部1は、その一つのクラック候補が、そのクラック候補グループに属する全てのクラック候補のうちで最も上部に存在するもの(匣鉢の側壁の上端部に最も近い位置にあるもの)である場合に限り、その一つのクラック候補に対しクラック判定を行うようにし、それ以外の場合には、その一つのクラック候補に対しクラック判定を行うことなく、ステップS13の処理に移行する。
【0099】
その後、制御部1は、クラック有無判定部12により、ステップS8で設定したクラック候補の全てに対してクラック判定を行ったか否かを判断し(ステップS13)、ステップS8で設定したクラック候補の一部に対して未だクラック判定を行っていないと判断した場合には(ステップS13のNO)、ステップS11〜ステップS13の処理を再度実行するようにする。
【0100】
一方、ステップS8で設定したクラック候補の全てに対してクラック判定を行ったと判断した場合(ステップS13のYES)、制御部1は、クラック判定の結果を出力部3に出力して今回の表面検査処理を終了させるようにする。
【0101】
なお、制御部1は、クラックがないと判断した場合には、クラックがない旨を表すクラック判定の結果を出力部3に出力することなく、今回の表面検査処理を終了させるようにしてもよい。
【0102】
以上の構成により、表面検査装置100は、匣鉢の側壁で発生するクラックがその匣鉢の側壁の上縁部から鉛直下方又は斜め下方に向かって延びるという傾向を利用して(すなわち、45度線強調フィルタ、90度線強調フィルタ、及び135度線強調フィルタを利用して)、クラックと汚れとが混在した匣鉢の側壁の外表面を表す処理対象画像から、クラックを顕在化させ且つ汚れをほぼ消失させた線状オブジェクト顕在化画像を生成した上でクラック候補判定を行うことにより、匣鉢の側壁の外表面に汚れが多く付着している場合であっても、その匣鉢の側壁の外表面におけるクラックの有無を正確に判定することができる。
【0103】
また、表面検査装置100は、フェレ径比に基づいて、一定の細長さを持つ線状オブジェクトを選択的にクラック候補として設定し、一定の細長さを持たない線状オブジェクトをクラック候補から除外することにより、匣鉢の側壁の外表面に汚れが多く付着している場合であっても、その匣鉢の側壁の外表面におけるクラックの有無を正確に判定することができる。
【0104】
また、表面検査装置100は、匣鉢の側壁の外表面に発生するクラックがその匣鉢の側壁の上縁部から始まるという見解に基づいてクラック判定を行うことにより、その匣鉢の側壁の外表面におけるクラックの有無を正確に判定することができる。
【0105】
また、表面検査装置100は、二つのクラック候補間の距離及びそれら二つのクラック候補のそれぞれの延在方向の間に形成される角度が所定条件を満たす場合に、それら二つのクラック候補を一つのクラック候補グループに纏めることにより、汚れ等の影響により途切れ途切れの不連続なものとして認識され得るクラックの状態(例えば、本数、深さ、又は長さ等である。)をより正確に認識することができる。
【0106】
以上、本発明の好ましい実施例について詳説したが、本発明は、上述した実施例に制限されることはなく、本発明の範囲を逸脱することなしに上述した実施例に種々の変形及び置換を加えることができる。
【0107】
例えば、上述の実施例において、表面検査装置100は、匣鉢の側壁の外表面におけるクラックの有無を判定するが、匣鉢の側壁の内表面若しくは頂面、又は匣鉢の内底面等の他の表面におけるクラックの有無を判定するようにしてもよく、焼成される粉体材料を受け容れ或いは支持する皿状や板状の他の焼成セッターの表面(外表面、内表面、内底面、外頂面等を含む。)におけるクラックの有無を判定するようにしてもよい。なお、その表面の縁部は、鉛直上方にある上縁部である必要はなく、何れの方向にある縁部であってもよい。
【0108】
また、上述の実施例において、処理対象画像生成部10は、表面画像にグレースケール化処理及びネガポジ反転処理を施すことによって処理対象画像を生成するが、グレースケール化処理のみを施すことによって処理対象画像を生成するようにしてもよい。
【0109】
この場合、顕在化画像生成部11は、その処理対象画像にネガポジ反転処理を施した上でフィルタ処理、二回目のネガポジ反転処理、及び二値化処理を施すようにする。
【符号の説明】
【0110】
1 制御部
2 画像取得部
3 出力部
10 処理対象画像生成部
11 顕在化画像生成部
12 クラック有無判定部
100 表面検査装置
CR1、CR2 クラック
CT 汚れ
F1、F3 最大フェレ径
F2、F4 最小フェレ径
LO1〜LO5 線状オブジェクト
【技術分野】
【0001】
本発明は、物体の表面を検査する装置及びその検査方法に関し、特に、その物体の表面を撮像して生成される処理対象画像に基づいて物体の表面を検査する表面検査装置及び表面検査方法に関する。
【背景技術】
【0002】
従来、電子工業用の粉体材料を匣鉢と呼ばれる升状の容器に入れ、ローラーコンベア等を用いてその匣鉢をトンネル炉等の連続焼成炉内に搬送し、その匣鉢内の粉体材料を焼成する方法が知られている(例えば、特許文献1参照。)。
【0003】
一般的に、匣鉢は、耐熱性に優れた緻密なセラミックスで形成され、その粉体材料の焼成工程を通じて、加熱され或いは冷却されることとなる。また、その加熱及び冷却の過程において、その匣鉢は、その本体内で局所的な温度差(温度勾配)を生じさせ、機械的な或いは熱的な応力差によるクラックをその表面に発生させる場合がある。なお、そのクラックは、その匣鉢の構造(上面が開放された升状の容器構造)に起因して、その側壁の上縁部から鉛直下方又は斜め下方に向かって延びる傾向がある。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2000−203947号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
クラックを発生させた匣鉢は、受け容れた粉体材料が焼成される際にそのクラックからその粉体材料を漏出させることとなり、製品製造コストを増大させる結果をもたらすこととなる。そのため、クラックを早期に発見することが求められている。
【0006】
上述の点に鑑み、本発明は、物体の表面を撮像して生成される画像に基づいてその表面におけるクラックの有無を判定する表面検査装置及び表面検査方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
上述の目的を達成するために、本発明の実施例に係る表面検査装置は、物体の表面を検査する表面検査装置であって、前記物体の表面を撮像して処理対象画像を生成する処理対象画像生成部と、前記処理対象画像に対して画像処理を施し、前記処理対象画像において所定方向に延びる線状オブジェクトを顕在化させた顕在化画像を生成する顕在化画像生成部と、前記顕在化画像における線状オブジェクトによって形成されるクラック候補の端部位置に基づいて前記物体の表面におけるクラックの有無を判定するクラック有無判定部と、を備えることを特徴とする。
【0008】
また、本発明の実施例に係る表面検査方法は、物体の表面を検査する表面検査方法であって、前記物体の表面を撮像して処理対象画像を生成する処理対象画像生成ステップ、前記処理対象画像に対して画像処理を施し、前記処理対象画像における所定方向に延びる線状オブジェクトを顕在化させた顕在化画像を生成する顕在化画像生成ステップ、前記顕在化画像における線状オブジェクトによって形成されるクラック候補の端部位置に基づいて前記物体の表面におけるクラックの有無を判定するクラック有無判定ステップ、を有することを特徴とする。
【発明の効果】
【0009】
上述の手段により、本発明は、物体の表面を撮像して生成される画像に基づいてその表面におけるクラックの有無を判定する表面検査装置及び表面検査方法を提供することができる。
【図面の簡単な説明】
【0010】
【図1】本発明の実施例に係る表面検査装置の構成例を示すブロック図である。
【図2】線状オブジェクトを顕在化させるための画像処理の内容を説明するための図である。
【図3】処理対象画像、45度線顕在化画像、90度線顕在化画像、135度線顕在化画像、及び線状オブジェクト顕在化画像のそれぞれの違いを示す図である。
【図4】線状オブジェクトとクラック候補との間の関係を説明するための図である。
【図5】表面検査処理の流れを示すフローチャートである。
【発明を実施するための形態】
【0011】
図1は、本発明の実施例に係る表面検査装置100の構成例を示すブロック図であり、表面検査装置100は、例えば、匣鉢の側壁の外表面を検査するための装置であって、その搬送経路の一部がトンネル炉内を通るローラーコンベアのそのトンネル炉外にある搬送経路の側に設置され、主に、制御部1、画像取得部2、及び出力部3を有する。
【0012】
制御部1は、CPU(Central Processing Unit)、RAM(Random Access Memory)、ROM(Read Only Memory)等を備えたコンピュータであって、例えば、処理対象画像生成部10、顕在化画像生成部11、及びクラック有無判定部12のそれぞれに対応するプログラムをROMに記憶し、各プログラムをRAM上に展開しながら各プログラムに対応する処理をCPUに実行させる。なお、処理対象画像生成部10、顕在化画像生成部11、及びクラック有無判定部12のそれぞれは、電子回路等のハードウェアで構成されていてもよい。
【0013】
画像取得部2は、制御部1で処理される画像を取得する装置であり、例えば、CMOS(Complementary Metal Oxide Semiconductor)やCCD(Charge Coupled Device)等の撮像素子を備えたカメラであって、そのカメラの前を通過するようにローラーコンベアによって搬送される匣鉢の側壁の外表面の一部又は全部を撮像し、撮像したその側壁の外表面の画像(以下、「表面画像」とする。)を制御部1に対して出力する。なお、表面画像は、好適には、その匣鉢の側壁の上縁部の画像を含むものとする。
【0014】
出力部3は、各種情報を出力するための装置であり、例えば、制御部1による匣鉢の側壁の外表面におけるクラックの検査結果を表示するためのディスプレイやLED、又は、その検査結果を音声出力するためのスピーカ等である。
【0015】
次に、制御部1が有する各機能要素について説明する。
【0016】
処理対象画像生成部10は、画像取得部2が取得した表面画像から処理対象画像を生成するための機能要素であり、例えば、その表面画像に対してその輝度に基づくグレースケール化処理を施すようにする。この場合、グレースケール化された表面画像の各画素の輝度は、例えば、256階調で表現され、値が大きい程明るいものとする。
【0017】
更に、処理対象画像生成部10は、グレースケール化された表面画像にネガポジ反転処理を施して処理対象画像を生成する。その処理対象画像に対するフィルタ処理(後述)の適用を容易にするためである。この場合、処理対象画像の各画素の輝度は、ネガポジ反転処理前の表面画像と同様に256階調で表現されるが、値が小さい程明るい状態を表すこととなる(具体的には輝度値0、1、・・・、254、255のそれぞれが輝度値255、254、・・・、1、0に変換されることとなる。)。
【0018】
なお、処理対象画像のサイズは、表面画像の全部に対応するものであってもよく、表面画像の一部に対応するものであってもよいが、その匣鉢の側壁の上縁部の画像を含むものとする。
【0019】
また、処理対象画像における単位画素のサイズは、その表面画像における単位画素のサイズと同じであってもよく、その表面画像における複数の単位画素(例えば、縦3画素×横3画素の9画素である。)を一纏めにしたサイズであってもよい。例えば、処理対象画像における単位画素のサイズが表面画像における単位画素の9画素分のサイズに相当する場合、その表面画像における9画素のそれぞれの輝度の統計値(例えば、平均値、最大値、最小値、中間値等である。)又はその9画素の中心画素の輝度がその処理対象画像における単位画素の輝度として採用されるものとする。
【0020】
顕在化画像生成部11は、処理対象画像に対して画像処理を施し、その処理対象画像において所定方向に延びる線状オブジェクトを顕在化させた線状オブジェクト顕在化画像を生成する機能要素である。
【0021】
「線状オブジェクト」は、縦方向、横方向、又は斜め方向に連続する所定数以上の画素によって形成される線状の画素の纏まりであり、直線状のオブジェクト、曲線状のオブジェクト、並びに、直線及び曲線が混在するオブジェクトを含む。
【0022】
図2は、線状オブジェクトを顕在化させるための画像処理(例えば、フィルタ処理、二回目のネガポジ反転処理及び二値化処理である。)の内容を説明するための図であり、図2(A)が処理対象画像を示し、図2(B1)〜図2(B3)がそのフィルタ処理に用いるフィルタを示し、図2(C1)〜(C3)がフィルタ処理後の処理対象画像の一部を示し、図2(D1)〜(D3)がフィルタ処理及び二回目のネガポジ反転処理を施した後の処理対象画像の一部を示し、図2(E1)〜(E3)がフィルタ処理、二回目のネガポジ反転処理、及び二値化処理を施した後の処理対象画像の一部を示す。なお、図2(A)及び図2(C1)〜(C3)内の数字は、一回目のネガポジ反転処理を施した後の各画素の輝度(すなわち、値が小さい程明るい)を示すものとし、図2(D1)〜(D3)及び図2(E1)〜(E3)内の数字は、二回目のネガポジ反転処理を施した後の各画素の輝度(すなわち、値が大きい程明るい)を示すものとする。
【0023】
図2(A)は、縦9画素、横9画素の大きさの処理対象画像であり、この処理対象画像は、輝度「8」の中心画素(第5行、第5列の画素であり、以下、「画素(5,5)」のように表現される。他の画素も同様に表現されるものとする。)を通って上下方向(90度の方向)に並ぶ輝度「8」の画素群(5,1)〜(5,9)と、中心画素(5,5)を通って45度の方向に並ぶ輝度「8」の画素群(1,9)、(2,8)、(3,7)、(4,6)、(6,4)、(7,3)、(8,2)、(9,1)と、中心画素(5,5)を通って135度の方向に並ぶ輝度「8」の画素群(1,1)、(2,2)、(3,3)、(4,4)、(5,5)、(6,6)、(7,7)、(8,8)、(9,9)とを含むものとする。
【0024】
最初に、顕在化画像生成部11は、図2(A)における灰色で塗り潰された画素(3,3)を注目画素とし、図2(B1)のフィルタを適用して、その注目画素のフィルタ処理後の輝度を算出する。
【0025】
図2(B1)は、45度の方向に延びる線状オブジェクトを強調するための縦5×横5のフィルタ(行列)であり、中心座標(3,3)の値を「3」とし、その中心座標(3,3)を通って45度の方向に並ぶ座標群(1,5)、(2,4)、(4,2)、(5,1)のそれぞれの値を「1」とし、これら座標群に平行に45度の方向に並ぶ座標群(1,3)、(2,2)、(3,1)、(3,5)、(4,4)、(5,3)の値を「−1」とする。以下、このフィルタを「45度線強調フィルタ」と称する。
【0026】
ここで、顕在化画像生成部11は、図2(A)の破線で囲まれた縦5画素、横5画素の大きさを有する処理対象画像の一部を行列Mと見立て、その行列Mの各成分と45度線強調フィルタ(行列)の対応する各成分との積のそれぞれを加算した値((8×0)+(0×0)+(0×(−1))+(0×0)+(8×1)+(0×0)+(8×(−1))+(0×0)+(0×1)+(8×0)+(0×(−1))+(0×0)+(8×3)+(0×0)+(8×(−1))+(0×0)+(0×1)+(0×0)+(8×(−1))+(8×0)+(0×1)+(0×0)+(0×(−1))+(0×0)+(8×0)=「8」)を、図2(A)の注目画素(3,3)のフィルタ処理後の輝度として算出する。
【0027】
その後、顕在化画像生成部11は、注目画素の位置を変えながら処理対象画像における他の画素群のそれぞれのフィルタ処理後の輝度を同様に算出する。
【0028】
図2(C1)は、このようにして算出されるフィルタ処理後の輝度で書き換えられた処理対象画像の一部(画像部分)を示し、その画像部分は、図2(A)の太線で囲まれた縦5画素、横5画素の大きさを有する画像部分に対応する。例えば、図2(A)の注目画素(3,3)は、図2(C1)の左上隅の画素に対応し、図2(A)の画素(7,7)は、図2(C1)の右下隅の画素に対応する。
【0029】
また、図2(D1)は、45度線強調フィルタを用いたフィルタ処理後の処理対象画像に二回目のネガポジ反転処理を施した後の処理対象画像の一部(画像部分)を示し、その画像部分は、図2(C1)で示される画像部分と同様、図2(A)の太線で囲まれた縦5画素、横5画素の大きさを有する画像部分に対応する。
【0030】
この二回目のネガポジ反転処理は、一回目のネガポジ反転処理とは反対に、例えば、輝度値255、254、・・・、1、0のそれぞれを輝度値0、1、・・・、254、255に変換する。なお、この二回目のネガポジ反転処理は、値255を超える輝度値を値255に制限するものとする(図2(C1)におけるマイナスの値を値0として扱うことを意味する。)。
【0031】
また、図2(E1)は、輝度閾値「245」を用いて、二回目のネガポジ反転処理を施した後の処理対象画像を二値化した後の処理対象画像の一部(画像部分)を示し、その画像部分は、図2(C1)及び図2(D1)で示される画像部分と同様、図2(A)の太線で囲まれた縦5画素、横5画素の大きさを有する画像部分に対応する。
【0032】
このように、図2(B1)の45度線強調フィルタは、図2(C1)で示されるように、45度の方向に並ぶ画素群の輝度を選択的に増大させ(図2(D1)では45度の方向に並ぶ画素群の輝度を選択的に低減させることとなる。)、また、図2(E1)で示されるように、適切な輝度閾値(この場合、「245」である。)を用いた二値化処理との組み合わせにより、45度の方向に並ぶ画素群を選択的に顕在化させる機能を果たす。
【0033】
このようにして、顕在化画像生成部11は、処理対象画像における45度の方向に並ぶ画素群で形成された線状オブジェクトを選択的に顕在化させた45度線顕在化画像を生成することができる。
【0034】
また、顕在化画像生成部11は、45度線強調フィルタ以外の他のフィルタを用いて他の方向に延びる線状オブジェクトを顕在化させるようにする。
【0035】
例えば、顕在化画像生成部11は、図2(A)の処理対象画像に対し、図2(B2)のフィルタを適用して、その処理対象画像における画素群のそれぞれのフィルタ処理後の輝度を算出する。
【0036】
図2(B2)は、135度の方向に延びる線状オブジェクトを強調するための縦5×横5のフィルタ(行列)であり、中心座標(3,3)の値を「3」とし、その中心座標(3,3)を通って135度の方向に並ぶ座標群(1,1)、(2,2)、(4,4)、(5,5)のそれぞれの値を「1」とし、これら座標群に平行に135度の方向に並ぶ座標群(1,3)、(2,4)、(3,1)、(3,5)、(4,2)、(5,3)の値を「−1」とする。以下、このフィルタを「135度線強調フィルタ」と称する。
【0037】
図2(C2)は、135度線強調フィルタを用いたフィルタ処理後の処理対象画像の一部(画像部分)を示し、その画像部分は、図2(A)の太線で囲まれた縦5画素、横5画素の大きさを有する画像部分に対応する。
【0038】
また、図2(D2)は、135度線強調フィルタを用いたフィルタ処理後の処理対象画像に二回目のネガポジ反転処理を施した後の処理対象画像の一部(画像部分)を示し、その画像部分は、図2(C2)で示される画像部分と同様、図2(A)の太線で囲まれた縦5画素、横5画素の大きさを有する画像部分に対応する。
【0039】
また、図2(E2)は、輝度閾値「245」を用いて、二回目のネガポジ反転処理を施した後の処理対象画像を二値化した後の処理対象画像の一部(画像部分)を示し、その画像部分は、図2(C2)及び図2(D2)で示される画像部分と同様、図2(A)の太線で囲まれた縦5画素、横5画素の大きさを有する画像部分に対応する。
【0040】
このように、図2(B2)の135度線強調フィルタは、図2(C2)で示されるように、135度の方向に並ぶ画素群の輝度を選択的に増大させ(図2(D2)では135度の方向に並ぶ画素群の輝度を選択的に低減させることとなる。)、また、図2(E2)で示されるように、適切な輝度閾値(この場合、「245」である。)を用いた二値化処理との組み合わせにより、135度の方向に並ぶ画素群を選択的に顕在化させる機能を果たす。
【0041】
このようにして、顕在化画像生成部11は、処理対象画像における135度の方向に並ぶ画素群で形成された線状オブジェクトを選択的に顕在化させた135度線顕在化画像を生成することができる。
【0042】
更に、顕在化画像生成部11は、45度線強調フィルタ及び135度線強調フィルタ以外の他のフィルタを用いて他の方向に延びる線状オブジェクトを顕在化させるようにする。
【0043】
例えば、顕在化画像生成部11は、図2(A)の処理対象画像に対して、図2(B3)のフィルタを適用して、その処理対象画像における画素群のそれぞれのフィルタ処理後の輝度を算出する。
【0044】
図2(B3)は、上下方向に延びる線状オブジェクトを強調するための縦5×横5のフィルタ(行列)であり、中心座標(3,3)の値を「3」とし、その中心座標(3,3)を通って上下方向(90度の方向)に並ぶ座標群(1,3)、(2,3)、(4,3)、(5,3)のそれぞれの値を「1」とし、これら座標群に平行に上下方向に並ぶ座標群(2,2)、(2,4)、(3,2)、(3,4)、(4,2)、(4,4)の値を「−1」とする。以下、このフィルタを「90度線強調フィルタ」と称する。
【0045】
図2(C3)は、90度線強調フィルタを用いたフィルタ処理後の処理対象画像の一部(画像部分)を示し、その画像部分は、図2(A)の太線で囲まれた縦5画素、横5画素の大きさを有する画像部分に対応する。
【0046】
また、図2(D3)は、90度線強調フィルタを用いたフィルタ処理後の処理対象画像に二回目のネガポジ反転処理を施した後の処理対象画像の一部(画像部分)を示し、その画像部分は、図2(C3)で示される画像部分と同様、図2(A)の太線で囲まれた縦5画素、横5画素の大きさを有する画像部分に対応する。
【0047】
また、図2(E3)は、輝度閾値「245」を用いて、二回目のネガポジ反転処理を施した後の処理対象画像を二値化した後の処理対象画像の一部(画像部分)を示し、その画像部分は、図2(C3)及び図2(D3)で示される画像部分と同様、図2(A)の太線で囲まれた縦5画素、横5画素の大きさを有する画像部分に対応する。
【0048】
このように、図2(B3)の90度線強調フィルタは、図2(C3)で示されるように、上下方向に並ぶ画素群の輝度を選択的に増大させ(図2(D3)では90度の方向に並ぶ画素群の輝度を選択的に低減させることとなる。)、また、図2(E3)で示されるように、適切な輝度閾値(この場合、「245」である。)を用いた二値化処理との組み合わせにより、上下方向に並ぶ画素群を選択的に顕在化させる機能を果たす。
【0049】
このようにして、顕在化画像生成部11は、処理対象画像における上下方向に並ぶ画素群で形成された線状オブジェクトを選択的に顕在化させた90度線顕在化画像を生成することができる。
【0050】
その後、顕在化画像生成部11は、45度線強調フィルタ、90度線強調フィルタ、及び135度線強調フィルタのそれぞれを用いて生成された45度線顕在化画像、90度線顕在化画像、及び135度線顕在化画像のそれぞれを重ね合わせて一つの最終的な線状オブジェクト顕在化画像を生成する。
【0051】
なお、顕在化画像生成部11は、45度線強調フィルタ、90度線強調フィルタ、及び135度線強調フィルタのうちの何れか一つを用いて単一の顕在化画像を生成し、その単一の顕在化画像をそのまま最終的な線状オブジェクト顕在化画像としてもよく、45度線強調フィルタ、90度線強調フィルタ、及び135度線強調フィルタのうちの何れか二つを用いて二つの顕在化画像を生成し、それら二つの顕在化画像を重ね合わせて一つの最終的な線状オブジェクト顕在化画像を生成するようにしてもよい。
【0052】
また、顕在化画像生成部11は、45度、90度及び135度以外の他の方向に延びる線状オブジェクトを強調するためのフィルタを用いて顕在化画像を生成するようにしてもよく、四つ以上のフィルタを用いて生成された四つ以上の顕在化画像のそれぞれを重ね合わせて一つの最終的な線状オブジェクト顕在化画像を生成するようにしてもよい。
【0053】
また、顕在化画像生成部11は、二値化処理を施した45度線顕在化画像、135度線顕在化画像、及び90度線顕在化画像を重ね合わせて線状オブジェクト顕在化画像を生成するが、二値化処理を施す前の45度線顕在化画像、135度線顕在化画像、及び90度線顕在化画像を重ね合わせた後に二値化処理を施して線状オブジェクト顕在化画像を生成するようにしてもよい。
【0054】
また、45度線強調フィルタ、90度線強調フィルタ、及び135度線強調フィルタは、それぞれ、縦5×横5の行列で表現されているが、縦7×横7の行列、縦9×横9の行列、又は、縦11×横11の行列等の他の行列で表現されてもよく、また、行列の成分(各座標の値)を、所望の強調度合いに応じて任意に設定できるものとする。
【0055】
図3は、処理対象画像、45度線顕在化画像、90度線顕在化画像、135度線顕在化画像、及び線状オブジェクト顕在化画像のそれぞれの違いを示す図であり、図3(A)が処理対象画像を示し、図3(B)が45度線顕在化画像を示し、図3(C)が135度線顕在化画像を示し、図3(D)が90度線顕在化画像を示し、図3(E)が線状オブジェクト顕在化画像を示す。
【0056】
具体的には、図3(A)の処理対象画像は、多くの汚れCTが付着した匣鉢の側壁の外表面に二つのクラックCR1、CR2が発生した状態を示し、その上縁がその匣鉢の側壁の上縁部に対応する。
【0057】
また、図3(B)の45度線顕在化画像は、略45度の方向に延びるクラックCR2を顕著に顕在化させ、略110度の方向に延びるクラックCR1及び汚れCTをほぼ消失させた状態を示す。
【0058】
また、図3(C)の135度線顕在化画像は、略110度の方向に延びるクラックCR1を僅かに顕在化させ、略45度の方向に延びるクラックCR2及び汚れCTをほぼ消失させた状態を示す。
【0059】
また、図3(D)の90度線顕在化画像は、略110度の方向に延びるクラックCR1を僅かに顕在化させ、略45度の方向に延びるクラックCR2及び汚れCTをほぼ消失させた状態を示す。
【0060】
また、図3(E)の線形オブジェクト顕在化画像は、図3(B)の45度線顕在化画像、図3(C)の135度線顕在化画像、及び図3(D)の90度線顕在化画像を重ね合わせた画像であり、略110度の方向に延びるクラックCR1と、略45度の方向に延びるクラックCR2とを顕在化させ、汚れCTをほぼ消失させた状態を示す。
【0061】
このように、顕在化画像生成部11は、匣鉢の側壁で発生するクラックがその匣鉢の側壁の上縁部から鉛直下方又は斜め下方に向かって延びるという傾向を利用して(すなわち、45度線強調フィルタ、90度線強調フィルタ、及び135度線強調フィルタを利用して)、クラックCR1、CR2と汚れCTとが混在した匣鉢の側壁の外表面を表す処理対象画像から、クラックCR1、CR2を顕在化させ且つ汚れCTをほぼ消失させた線状オブジェクト顕在化画像を生成することができる。
【0062】
クラック有無判定部12は、顕在化画像生成部11が生成した線状オブジェクト顕在化画像における線状オブジェクト(例えば、線状オブジェクト顕在化画像における二値化処理後の輝度「0」の画素によって形成されるオブジェクトである。)によって形成されるクラック候補の端部位置に基づいて匣鉢の側壁の外表面におけるクラックの有無を判定する機能要素である。
【0063】
具体的には、クラック有無判定部12は、例えば、所定数以上の画素群で形成される線状オブジェクトの最大フェレ径及び最小フェレ径の一方である第一フェレ径と、その第一フェレ径の方向に垂直な方向におけるフェレ径である第二フェレ径とに基づいてクラック候補を設定する。
【0064】
「フェレ径」は、線状オブジェクトを二本の平行線で挟んだときのそれら二本の平行線の間の距離であり、「最大フェレ径」は、その線状オブジェクトに関するフェレ径のうち最も値が大きいものを意味し、「最小フェレ径」は、その線状オブジェクトに関するフェレ径のうち最も値が小さいものを意味する。
【0065】
ここで、図4を参照しながら、線状オブジェクトとクラック候補との間の関係について説明する。
【0066】
図4は、線状オブジェクト顕在化画像の一部を示す図であり、五つの線状オブジェクトLO1〜LO5を含む。
【0067】
クラック有無判定部12は、それら五つの線状オブジェクトLO1〜LO5のうち、所定数以上の画素群で形成される線状オブジェクトLO1、LO2を、フェレ径を導出する対象として抽出する。一定の大きさを有する線状オブジェクトのみをクラックであると判定できるようにするためであり、一定の大きさを持たない線状オブジェクトを判定対象から除外することにより無駄な演算を省略できるようにするためである。但し、クラック有無判定部12は、線状オブジェクト顕在化画像における全ての線状オブジェクトを判定対象としてもよい。
【0068】
その後、クラック有無判定部12は、線状オブジェクトLO1の最大フェレ径F1を導き出し、その最大フェレ径F1が所定値以上であれば、その最大フェレ径F1の方向に垂直な方向におけるフェレ径F2を導き出した上で、フェレ径比(最大フェレ径F1をフェレ径F2で除した値である。)を算出し、そのフェレ径比が所定値以上であれば、線状オブジェクトLO1をクラック候補として設定する。一定の細長さを有する線状オブジェクトのみをクラックであると判定できるようにするためである。
【0069】
同様に、クラック有無判定部12は、線状オブジェクトLO2の最大フェレ径F3を導き出し、その最大フェレ径F3が所定値以上であれば、その最大フェレ径F3の方向に垂直な方向におけるフェレ径F4を導き出した上で、フェレ径比(最大フェレ径F3をフェレ径F4で除した値である。)を算出し、そのフェレ径比が所定値以上であれば、線状オブジェクトLO2をクラック候補として設定する。
【0070】
なお、クラック有無判定部12は、最大フェレ径の方向に垂直な方向におけるフェレ径を導出する代わりに最小フェレ径を導出した上で、フェレ径比(最大フェレ径を最小フェレ径で除した値である。)を算出するようにしてもよい。これは、最小フェレ径の方向が最大フェレ径の方向に対してほぼ垂直となる場合が多いという考えに基づくものであり、最大フェレ径の方向に垂直な方向におけるフェレ径を導出する処理を省略して演算負荷を低減させることができる。
【0071】
また、クラック有無判定部12は、最初に線状オブジェクトの最小フェレ径とその最小フェレ径の方向に垂直な方向におけるフェレ径とを導き出した上で、フェレ径比(その垂直な方向におけるフェレ径を最小フェレ径で除した値である。)を算出し、そのフェレ径比が所定値以上である場合に、その線状オブジェクトをクラック候補として設定するようにしてもよい。
【0072】
なお、この場合においても、クラック有無判定部12は、最小フェレ径の方向に垂直な方向におけるフェレ径を導出する代わりに最大フェレ径を導出した上で、フェレ径比(最大フェレ径を最小フェレ径で除した値である。)を算出するようにしてもよい。
【0073】
その後、クラック有無判定部12は、線状オブジェクト顕在化画像における、その設定したクラック候補(線状オブジェクト)の上端とその匣鉢の側壁の上縁部との間の距離を導き出し、その導き出した距離が所定値(例えば、その匣鉢の側壁の高さの20%である。)未満の場合に、そのクラック候補がクラックであると判定する。この判定は、匣鉢の側壁の外表面に発生するクラックがその匣鉢の側壁の上縁部から始まるという見解に基づくものである。
【0074】
なお、線状オブジェクト顕在化画像におけるその匣鉢の側壁の上縁部の位置は、画像取得部2の設置位置を調節することによって、その線状オブジェクト顕在化画像の上縁と一致するように設定されており、クラック候補の上端とその匣鉢の側壁の上縁部との間の距離は、クラック候補の上端からその線状オブジェクト顕在化画像の上縁までの距離に相当するものとする。但し、線状オブジェクト顕在化画像におけるその匣鉢の側壁の上縁部の位置は、各種画像処理によってその都度導き出されるものであってもよい。
【0075】
その後、クラック有無判定部12は、その匣鉢の側壁の外表面にクラックが存在すると判定した場合に、出力部3に対して制御信号を送信し、クラックが存在すること、及び、そのクラックに関する情報(例えば、クラックの深さ(匣鉢の側壁の上縁部からそのクラックの下端までの距離)やクラックの長さである。)をディスプレイ上に表示させ或いはスピーカから音声出力させる。
【0076】
また、クラック有無判定部12は、所定の位置関係にある二つのクラック候補を一つのクラック候補グループに纏めるようにしてもよく、例えば、二つのクラック候補のそれぞれの端点の間の距離が所定値未満であり、且つ、それら二つのクラック候補のそれぞれの延在方向の間の角度が所定値未満である場合に、それら二つのクラック候補を一つのクラック候補グループに纏めるようにする。
【0077】
具体的には、クラック有無判定部12は、図4で示されるように、既にクラック候補として設定された線状オブジェクトLO1の下端部にある画素と、既にクラック候補として設定された線状オブジェクトLO2の上端部にある画素との間の距離Dを導き出し、その距離Dが所定値(例えば、10ミリメートルである。)未満であるか否かを判定する。
【0078】
その後、クラック有無判定部12は、その距離Dが所定値未満であれば、図4の矢印AR1で示される線状オブジェクト(クラック候補)LO1の延在方向(最大フェレ径F1の方向)と、図4の矢印AR2で示される線状オブジェクトLO2(クラック候補)の延在方向(最大フェレ径F3の方向)との間に形成される角度αが所定値(例えば、45度である。)未満であるか否かを判定する。
【0079】
その後、クラック有無判定部12は、その角度αが所定値未満であれば、線状オブジェクト(クラック候補)LO1と線状オブジェクト(クラック候補)LO2とが同じクラックに属するものであると推定して、一つのクラック候補グループに纏めるようにラベリングする。
【0080】
これにより、クラック有無判定部12は、そのクラック候補グループに含まれる線状オブジェクト(クラック候補)LO1、LO2のうち、その匣鉢の側壁の上縁部に最も近い線状オブジェクト(クラック候補)である線状オブジェクト(クラック候補)LO1の上端とその匣鉢の側壁の上縁部との間の距離を導き出し、その導き出した距離が所定値(例えば、その匣鉢の側壁の高さの20%である。)未満の場合に、そのクラック候補グループに含まれる全ての線状オブジェクト(クラック候補)LO1、LO2が同じ一つのクラックを構成するものであると判定する。
【0081】
その結果、クラック有無判定部12は、線状オブジェクト(クラック候補)LO2の上端とその匣鉢の側壁の上縁部との間の距離の導出を省略することができ、その処理に関する負荷を低減させることができる。
【0082】
また、クラック有無判定部12は、途切れ途切れの不連続な状態で撮像された線状オブジェクト顕在化画像におけるクラックを複数のクラック候補に分断された状態で認識している場合であっても、それら複数のクラック候補を一つのクラック候補グループに纏めることができ、その匣鉢の側壁の外表面にあるクラックの本数やそのクラックの深さをより正確に認識することができる。
【0083】
次に、図5を参照しながら、表面検査装置100が匣鉢の側壁の外表面にクラックが存在するか否かを検査する処理(以下、「表面検査処理」とする。)の流れについて説明する。なお、図5は、その表面検査処理の流れを示すフローチャートであり、表面検査装置100は、画像取得部2から表面画像を取得する毎にこの表面検査処理を実行するものとする。
【0084】
最初に、表面検査装置100の制御部1は、処理対象画像生成部10により、画像取得部2が取得した表面画像から処理対象画像を生成する(ステップS1)。
【0085】
その後、制御部1は、顕在化画像生成部11により、処理対象画像に対し、45度線強調フィルタ(図2(B1)参照。)、90度線強調フィルタ(図2(B3)参照。)、及び135度線強調フィルタ(図2(B2)参照。)をそれぞれ個別に適用した上で、所定の輝度閾値を用いて二値化し、45度線顕在化画像(図3(B)参照。)、90度線顕在化画像(図3(D)参照。)、及び135度線顕在化画像(図3(C)参照。)を個別に生成する(ステップS2)。
【0086】
その後、制御部1は、顕在化画像生成部11により、それら三つの顕在化画像を重ね合わせて合成し、線状オブジェクト顕在化画像(図3(E)参照。)を生成する(ステップS3)。
【0087】
その後、制御部1は、クラック有無判定部12により、その線状オブジェクト顕在化画像における、所定数以上の画素群で形成される線状オブジェクトを、以降の処理の対象として抽出する(ステップS4)。
【0088】
その後、制御部1は、クラック有無判定部12により、抽出した複数の線状オブジェクトのうちの一つの最大フェレ径を導き出し(ステップS5)、その最大フェレ径が所定値以上であれば、その最大フェレ径の方向に垂直な方向におけるフェレ径を導き出すようにする(ステップS6)。
【0089】
その後、制御部1は、クラック有無判定部12により、フェレ径比(最大フェレ径をその垂直なフェレ径で除した値である。)を算出し、そのフェレ径比と所定の閾値TH1とを比較する(ステップS7)。以下、この比較処理を「クラック候補判定」とする。
【0090】
そのフェレ径比が閾値TH1以上である場合(ステップS7のYES)、制御部1は、クラック有無判定部12により、その線状オブジェクトをクラック候補として設定する(ステップS8)。
【0091】
一方、そのフェレ径比が閾値TH1未満である場合(ステップS7のNO)、制御部1は、その線状オブジェクトをクラック候補として設定することなく、ステップS9の処理に移行する。
【0092】
その後、制御部1は、クラック有無判定部12により、ステップS4で抽出した線状オブジェクトの全てに対してクラック候補判定を行ったか否かを判断し(ステップS9)、ステップS4で抽出した線状オブジェクトの一部に対して未だクラック候補判定を行っていないと判断した場合には(ステップS9のNO)、ステップS5〜ステップS9の処理を再度実行するようにする。
【0093】
一方、ステップS4で抽出した線状オブジェクトの全てに対してクラック候補判定を行ったと判断した場合(ステップS9のYES)、制御部1は、クラック有無判定部12により、ステップS8で設定された複数のクラック候補を一又は複数のクラック候補グループにグループ化する(ステップS10)。
【0094】
具体的には、制御部1は、クラック有無判定部12により、隣り合う二つのクラック候補(線状オブジェクト)の間の距離が所定値未満であり、且つ、それら二つのクラック候補のそれぞれの延在方向の間に形成される角度が所定値未満であれば、それら二つのクラック候補が同じクラック候補グループに属するものとしてラベリングする。
【0095】
その後、制御部1は、クラック有無判定部12により、ステップS8で設定された複数のクラック候補のうちの一つのクラック候補の上端と匣鉢の側壁の上端部との間の距離を、所定の閾値TH2と比較する(ステップS11)。以下、この比較処理を「クラック判定」とする。
【0096】
その距離が所定の閾値TH2未満であると判断した場合(ステップS11のYES)、制御部1は、クラック有無判定部12により、そのクラック候補がクラックであると判定する(ステップS12)。
【0097】
一方、その距離が所定の閾値TH2以上であると判断した場合(ステップS11のNO)、制御部1は、そのクラック候補がクラック候補でないと判定する(ステップS13)。
【0098】
なお、その一つのクラック候補がクラック候補グループに属するものである場合、制御部1は、その一つのクラック候補が、そのクラック候補グループに属する全てのクラック候補のうちで最も上部に存在するもの(匣鉢の側壁の上端部に最も近い位置にあるもの)である場合に限り、その一つのクラック候補に対しクラック判定を行うようにし、それ以外の場合には、その一つのクラック候補に対しクラック判定を行うことなく、ステップS13の処理に移行する。
【0099】
その後、制御部1は、クラック有無判定部12により、ステップS8で設定したクラック候補の全てに対してクラック判定を行ったか否かを判断し(ステップS13)、ステップS8で設定したクラック候補の一部に対して未だクラック判定を行っていないと判断した場合には(ステップS13のNO)、ステップS11〜ステップS13の処理を再度実行するようにする。
【0100】
一方、ステップS8で設定したクラック候補の全てに対してクラック判定を行ったと判断した場合(ステップS13のYES)、制御部1は、クラック判定の結果を出力部3に出力して今回の表面検査処理を終了させるようにする。
【0101】
なお、制御部1は、クラックがないと判断した場合には、クラックがない旨を表すクラック判定の結果を出力部3に出力することなく、今回の表面検査処理を終了させるようにしてもよい。
【0102】
以上の構成により、表面検査装置100は、匣鉢の側壁で発生するクラックがその匣鉢の側壁の上縁部から鉛直下方又は斜め下方に向かって延びるという傾向を利用して(すなわち、45度線強調フィルタ、90度線強調フィルタ、及び135度線強調フィルタを利用して)、クラックと汚れとが混在した匣鉢の側壁の外表面を表す処理対象画像から、クラックを顕在化させ且つ汚れをほぼ消失させた線状オブジェクト顕在化画像を生成した上でクラック候補判定を行うことにより、匣鉢の側壁の外表面に汚れが多く付着している場合であっても、その匣鉢の側壁の外表面におけるクラックの有無を正確に判定することができる。
【0103】
また、表面検査装置100は、フェレ径比に基づいて、一定の細長さを持つ線状オブジェクトを選択的にクラック候補として設定し、一定の細長さを持たない線状オブジェクトをクラック候補から除外することにより、匣鉢の側壁の外表面に汚れが多く付着している場合であっても、その匣鉢の側壁の外表面におけるクラックの有無を正確に判定することができる。
【0104】
また、表面検査装置100は、匣鉢の側壁の外表面に発生するクラックがその匣鉢の側壁の上縁部から始まるという見解に基づいてクラック判定を行うことにより、その匣鉢の側壁の外表面におけるクラックの有無を正確に判定することができる。
【0105】
また、表面検査装置100は、二つのクラック候補間の距離及びそれら二つのクラック候補のそれぞれの延在方向の間に形成される角度が所定条件を満たす場合に、それら二つのクラック候補を一つのクラック候補グループに纏めることにより、汚れ等の影響により途切れ途切れの不連続なものとして認識され得るクラックの状態(例えば、本数、深さ、又は長さ等である。)をより正確に認識することができる。
【0106】
以上、本発明の好ましい実施例について詳説したが、本発明は、上述した実施例に制限されることはなく、本発明の範囲を逸脱することなしに上述した実施例に種々の変形及び置換を加えることができる。
【0107】
例えば、上述の実施例において、表面検査装置100は、匣鉢の側壁の外表面におけるクラックの有無を判定するが、匣鉢の側壁の内表面若しくは頂面、又は匣鉢の内底面等の他の表面におけるクラックの有無を判定するようにしてもよく、焼成される粉体材料を受け容れ或いは支持する皿状や板状の他の焼成セッターの表面(外表面、内表面、内底面、外頂面等を含む。)におけるクラックの有無を判定するようにしてもよい。なお、その表面の縁部は、鉛直上方にある上縁部である必要はなく、何れの方向にある縁部であってもよい。
【0108】
また、上述の実施例において、処理対象画像生成部10は、表面画像にグレースケール化処理及びネガポジ反転処理を施すことによって処理対象画像を生成するが、グレースケール化処理のみを施すことによって処理対象画像を生成するようにしてもよい。
【0109】
この場合、顕在化画像生成部11は、その処理対象画像にネガポジ反転処理を施した上でフィルタ処理、二回目のネガポジ反転処理、及び二値化処理を施すようにする。
【符号の説明】
【0110】
1 制御部
2 画像取得部
3 出力部
10 処理対象画像生成部
11 顕在化画像生成部
12 クラック有無判定部
100 表面検査装置
CR1、CR2 クラック
CT 汚れ
F1、F3 最大フェレ径
F2、F4 最小フェレ径
LO1〜LO5 線状オブジェクト
【特許請求の範囲】
【請求項1】
物体の表面を検査する表面検査装置であって、
前記物体の表面を撮像して処理対象画像を生成する処理対象画像生成部と、
前記処理対象画像に対して画像処理を施し、前記処理対象画像において所定方向に延びる線状オブジェクトを顕在化させた顕在化画像を生成する顕在化画像生成部と、
前記顕在化画像における線状オブジェクトによって形成されるクラック候補の端部位置に基づいて前記物体の表面におけるクラックの有無を判定するクラック有無判定部と、
を備えることを特徴とする表面検査装置。
【請求項2】
前記処理対象画像生成部は、前記物体の表面の縁部を含む処理対象画像を生成し、
前記顕在化画像生成部は、前記縁部に垂直な第一方向に延びる線状オブジェクトを顕在化させた第一顕在化画像と、該第一方向に対して傾斜する第二方向に延びる線状オブジェクトを顕在化させた第二顕在化画像と、該第一方向に対して該第二方向とは反対側に傾斜する第三方向に延びる線状オブジェクトを顕在化させた第三顕在化画像とを生成し、該第一顕在化画像、該第二顕在化画像、及び該第三顕在化画像を合成して前記顕在化画像を生成する、
ことを特徴とする請求項1に記載の表面検査装置。
【請求項3】
前記クラック有無判定部は、前記線状オブジェクトの、最大フェレ径及び最小フェレ径の一方である第一フェレ径と、該第一フェレ径の方向に垂直な方向におけるフェレ径である第二フェレ径とに基づいてクラック候補を設定し、該設定されたクラック候補の端部位置に基づいて前記物体の表面におけるクラックの有無を判定する、
ことを特徴とする請求項1又は2に記載の表面検査装置。
【請求項4】
前記処理対象画像生成部は、前記物体の表面の縁部を含む処理対象画像を生成し、
前記クラック有無判定部は、前記クラック候補の端部位置が、前記物体の表面の縁部から所定距離内にあると判断した場合に、前記物体の表面にクラックが存在すると判定する、
ことを特徴とする請求項1乃至3の何れか一項に記載の表面検査装置。
【請求項5】
前記クラック有無判定部は、二つのクラック候補のそれぞれの端点の間の距離が所定値未満であり、且つ、該二つのクラック候補のそれぞれの延在方向の間の角度が所定値未満である場合に、該二つのクラック候補を一つのクラック候補グループに纏め、該クラック候補グループに含まれるクラック候補のうちの最端にあるクラック候補の端部位置に基づいて前記物体の表面におけるクラックの有無を判定する、
ことを特徴とする請求項1乃至4の何れか一項に記載の表面検査装置。
【請求項6】
物体の表面を検査する表面検査方法であって、
前記物体の表面を撮像して処理対象画像を生成する処理対象画像生成ステップ、
前記処理対象画像に対して画像処理を施し、前記処理対象画像における所定方向に延びる線状オブジェクトを顕在化させた顕在化画像を生成する顕在化画像生成ステップ、
前記顕在化画像における線状オブジェクトによって形成されるクラック候補の端部位置に基づいて前記物体の表面におけるクラックの有無を判定するクラック有無判定ステップ、
を有することを特徴とする表面検査方法。
【請求項7】
前記処理対象画像生成ステップにおいて、前記物体の表面の縁部を含む処理対象画像を生成し、
前記顕在化画像生成ステップにおいて、前記縁部に垂直な第一方向に延びる線状オブジェクトを顕在化させた第一顕在化画像と、該第一方向に対して傾斜する第二方向に延びる線状オブジェクトを顕在化させた第二顕在化画像と、該第一方向に対して該第二方向とは反対側に傾斜する第三方向に延びる線状オブジェクトを顕在化させた第三顕在化画像とを生成し、該第一顕在化画像、該第二顕在化画像、及び該第三顕在化画像を合成して前記顕在化画像を生成する、
ことを特徴とする請求項6に記載の表面検査方法。
【請求項8】
前記クラック有無判定ステップにおいて、前記線状オブジェクトの、最大フェレ径及び最小フェレ径の一方である第一フェレ径と、該第一フェレ径の方向に垂直な方向におけるフェレ径である第二フェレ径とに基づいてクラック候補を設定し、該設定されたクラック候補の端部位置に基づいて前記物体の表面におけるクラックの有無を判定する、
ことを特徴とする請求項6又は7に記載の表面検査方法。
【請求項9】
前記処理対象画像生成ステップにおいて、前記物体の表面の縁部を含む処理対象画像を生成し、
前記クラック有無判定ステップにおいて、前記クラック候補の端部位置が、前記物体の表面の縁部から所定距離内にあると判断した場合に、前記物体の表面にクラックが存在すると判定する、
ことを特徴とする請求項6乃至8の何れか一項に記載の表面検査方法。
【請求項10】
前記クラック有無判定ステップにおいて、二つのクラック候補のそれぞれの端点の間の距離が所定値未満であり、且つ、該二つのクラック候補のそれぞれの延在方向の間の角度が所定値未満である場合に、該二つのクラック候補を一つのクラック候補グループに纏め、該クラック候補グループに含まれるクラック候補のうちの最端にあるクラック候補の端部位置に基づいて前記物体の表面におけるクラックの有無を判定する、
ことを特徴とする請求項6乃至9の何れか一項に記載の表面検査方法。
【請求項1】
物体の表面を検査する表面検査装置であって、
前記物体の表面を撮像して処理対象画像を生成する処理対象画像生成部と、
前記処理対象画像に対して画像処理を施し、前記処理対象画像において所定方向に延びる線状オブジェクトを顕在化させた顕在化画像を生成する顕在化画像生成部と、
前記顕在化画像における線状オブジェクトによって形成されるクラック候補の端部位置に基づいて前記物体の表面におけるクラックの有無を判定するクラック有無判定部と、
を備えることを特徴とする表面検査装置。
【請求項2】
前記処理対象画像生成部は、前記物体の表面の縁部を含む処理対象画像を生成し、
前記顕在化画像生成部は、前記縁部に垂直な第一方向に延びる線状オブジェクトを顕在化させた第一顕在化画像と、該第一方向に対して傾斜する第二方向に延びる線状オブジェクトを顕在化させた第二顕在化画像と、該第一方向に対して該第二方向とは反対側に傾斜する第三方向に延びる線状オブジェクトを顕在化させた第三顕在化画像とを生成し、該第一顕在化画像、該第二顕在化画像、及び該第三顕在化画像を合成して前記顕在化画像を生成する、
ことを特徴とする請求項1に記載の表面検査装置。
【請求項3】
前記クラック有無判定部は、前記線状オブジェクトの、最大フェレ径及び最小フェレ径の一方である第一フェレ径と、該第一フェレ径の方向に垂直な方向におけるフェレ径である第二フェレ径とに基づいてクラック候補を設定し、該設定されたクラック候補の端部位置に基づいて前記物体の表面におけるクラックの有無を判定する、
ことを特徴とする請求項1又は2に記載の表面検査装置。
【請求項4】
前記処理対象画像生成部は、前記物体の表面の縁部を含む処理対象画像を生成し、
前記クラック有無判定部は、前記クラック候補の端部位置が、前記物体の表面の縁部から所定距離内にあると判断した場合に、前記物体の表面にクラックが存在すると判定する、
ことを特徴とする請求項1乃至3の何れか一項に記載の表面検査装置。
【請求項5】
前記クラック有無判定部は、二つのクラック候補のそれぞれの端点の間の距離が所定値未満であり、且つ、該二つのクラック候補のそれぞれの延在方向の間の角度が所定値未満である場合に、該二つのクラック候補を一つのクラック候補グループに纏め、該クラック候補グループに含まれるクラック候補のうちの最端にあるクラック候補の端部位置に基づいて前記物体の表面におけるクラックの有無を判定する、
ことを特徴とする請求項1乃至4の何れか一項に記載の表面検査装置。
【請求項6】
物体の表面を検査する表面検査方法であって、
前記物体の表面を撮像して処理対象画像を生成する処理対象画像生成ステップ、
前記処理対象画像に対して画像処理を施し、前記処理対象画像における所定方向に延びる線状オブジェクトを顕在化させた顕在化画像を生成する顕在化画像生成ステップ、
前記顕在化画像における線状オブジェクトによって形成されるクラック候補の端部位置に基づいて前記物体の表面におけるクラックの有無を判定するクラック有無判定ステップ、
を有することを特徴とする表面検査方法。
【請求項7】
前記処理対象画像生成ステップにおいて、前記物体の表面の縁部を含む処理対象画像を生成し、
前記顕在化画像生成ステップにおいて、前記縁部に垂直な第一方向に延びる線状オブジェクトを顕在化させた第一顕在化画像と、該第一方向に対して傾斜する第二方向に延びる線状オブジェクトを顕在化させた第二顕在化画像と、該第一方向に対して該第二方向とは反対側に傾斜する第三方向に延びる線状オブジェクトを顕在化させた第三顕在化画像とを生成し、該第一顕在化画像、該第二顕在化画像、及び該第三顕在化画像を合成して前記顕在化画像を生成する、
ことを特徴とする請求項6に記載の表面検査方法。
【請求項8】
前記クラック有無判定ステップにおいて、前記線状オブジェクトの、最大フェレ径及び最小フェレ径の一方である第一フェレ径と、該第一フェレ径の方向に垂直な方向におけるフェレ径である第二フェレ径とに基づいてクラック候補を設定し、該設定されたクラック候補の端部位置に基づいて前記物体の表面におけるクラックの有無を判定する、
ことを特徴とする請求項6又は7に記載の表面検査方法。
【請求項9】
前記処理対象画像生成ステップにおいて、前記物体の表面の縁部を含む処理対象画像を生成し、
前記クラック有無判定ステップにおいて、前記クラック候補の端部位置が、前記物体の表面の縁部から所定距離内にあると判断した場合に、前記物体の表面にクラックが存在すると判定する、
ことを特徴とする請求項6乃至8の何れか一項に記載の表面検査方法。
【請求項10】
前記クラック有無判定ステップにおいて、二つのクラック候補のそれぞれの端点の間の距離が所定値未満であり、且つ、該二つのクラック候補のそれぞれの延在方向の間の角度が所定値未満である場合に、該二つのクラック候補を一つのクラック候補グループに纏め、該クラック候補グループに含まれるクラック候補のうちの最端にあるクラック候補の端部位置に基づいて前記物体の表面におけるクラックの有無を判定する、
ことを特徴とする請求項6乃至9の何れか一項に記載の表面検査方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−137424(P2012−137424A)
【公開日】平成24年7月19日(2012.7.19)
【国際特許分類】
【出願番号】特願2010−290964(P2010−290964)
【出願日】平成22年12月27日(2010.12.27)
【出願人】(000183303)住友金属鉱山株式会社 (2,015)
【Fターム(参考)】
【公開日】平成24年7月19日(2012.7.19)
【国際特許分類】
【出願日】平成22年12月27日(2010.12.27)
【出願人】(000183303)住友金属鉱山株式会社 (2,015)
【Fターム(参考)】
[ Back to top ]