
表面検査装置
【課題】検査ヘッドの回転速度が変動した場合でも検査を実行することができ、検査精度を悪化せずに検査時間を短縮できる表面検査装置を提供する。
【解決手段】本発明の表面検査装置1は、被検査物100の穴100aに挿入可能で、かつ長手方向に延びる軸線AX回りに回転可能な検査ヘッド16と、検査ヘッド16が被検査物100に対して軸線AX方向に相対移動するように検査ヘッド16を直線移動させる直線駆動機構30と、検査ヘッド16の回転位置を検出するロータリーエンコーダ43と、を備え、検査ヘッド16の一回転あたりの軸線AX方向に関する移動量が回転速度に拘わらず一定となるように、ロータリーエンコーダ43の出力信号に基づいて直線駆動機構30の動作を制御する。
【解決手段】本発明の表面検査装置1は、被検査物100の穴100aに挿入可能で、かつ長手方向に延びる軸線AX回りに回転可能な検査ヘッド16と、検査ヘッド16が被検査物100に対して軸線AX方向に相対移動するように検査ヘッド16を直線移動させる直線駆動機構30と、検査ヘッド16の回転位置を検出するロータリーエンコーダ43と、を備え、検査ヘッド16の一回転あたりの軸線AX方向に関する移動量が回転速度に拘わらず一定となるように、ロータリーエンコーダ43の出力信号に基づいて直線駆動機構30の動作を制御する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、穴が形成された被検査物の穴の内周面に存在する異物、巣、傷等の欠陥を検査する表面検査装置に関する。
【背景技術】
【0002】
穴が形成された被検査物、例えば内燃機関のシリンダライナやシリンダボア等の内周面を検査する表面検査装置として、その内周面に検査光を投光し、かつ内周面からの反射光を受け入れるように構成した棒状の検査ヘッドを穴に挿入し、その上で検査ヘッドを長手方向に延びる軸線回りに回転させつつ被検査物に対して相対的に軸線方向に進退させることにより、穴の内周面を検査できるようにしたものがある(例えば、特許文献1参照)。
【0003】
【特許文献1】特開平11−281582号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
このような表面検査装置では、被検査物の穴の内周面をムラ無く連続的に検査するために検査ヘッドの一回転あたりの軸線方向への移動量を一定に保持する必要がある。例えば、その移動量を一定に保持するために検査ヘッドの回転速度と軸線方向への移動速度とを個別に制御することが考えられる。しかし、その場合には、検査ヘッドの回転速度が一定になってからでないと検査ヘッドの軸線方向への移動を開始できない。そのため、検査ヘッドの回転速度が一定でない加速中や減速中には検査を実行することができず、その分だけ一つの被検査物に対する検査時間が長くなる。また、検査ヘッドの回転速度の変動が許容範囲内であれば検査を実施することができるが、厳密に言えばその回転速度の変動が検査結果に影響を与えるので、検査精度を悪化させる。特許文献1には、検査ヘッドを回転させて穴の内周面を環状に検査しつつ検査ヘッドを徐々に軸線方向に移動させる旨の記載があるが、検査ヘッドの回転と軸線方向への移動との関係について具体的な記載はない。
【0005】
そこで、本発明は、検査ヘッドの回転速度が変動した場合でも検査を実行することができ、検査精度を悪化せずに検査時間を短縮できる表面検査装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の表面検査装置(1)は、穴(100a)が形成された被検査物(100)の前記穴に挿入可能で、かつ長手方向に延びる軸線(AX)回りに回転可能な検査ヘッド(16)と、前記検査ヘッドが前記被検査物に対して前記軸線方向に相対移動するように前記検査ヘッド又は前記被検査物を直線移動させる移動手段(30)と、前記検査ヘッドを前記軸線の回りに回転駆動する回転駆動手段(40、71、73〜75)と、前記検査ヘッドの回転位置を検出する回転位置検出手段(43)と、前記検査ヘッドの一回転あたりの前記軸線方向に関する移動量が回転速度に拘わらず一定となるように、前記回転位置検出手段の検出結果に基づいて前記移動手段の動作を制御する移動制御手段(61)と、を備えることにより、上述した課題を解決する。
【0007】
この検査装置によれば、検査ヘッドの回転速度が一定でない加速中や減速中においても検査ヘッド一回転あたりの軸線方向に関する移動量が一定となる。そのため、検査ヘッドが加速中や減速中であっても検査ヘッドを軸線方向へ移動させて検査を実行することができるので、一つの被検査物の検査に要する検査時間を短縮することができる。そのような場合でも検査ヘッド一回転あたりの軸線方向に関する移動量は一定に保持されるので検査精度を悪化させることはない。また、検査精度を確保するために検査ヘッドの回転速度が一定保持されるように正確に制御する必要はなく検査ヘッドを回転できれば十分である。従って、検査ヘッドを回転駆動する回転駆動手段の構成に対する制約が緩和されるので、その選定の幅が拡大する。
【0008】
本発明の表面検査装置の一態様においては、前記移動手段は、入力されたパルス信号のパルスの数に回転角度が比例するように構成された電動モータ(35)と、前記電動モータの回転運動を前記検査ヘッドの前記軸線方向に関する直線運動に変換する変換機構(34、36)と、を備えており、前記回転位置検出手段は、前記検査ヘッドの回転位置に応じたパルス信号(Psa)を生成するように構成されており、かつ、前記移動制御手段は、前記回転位置検出手段が生成したパルス信号の周波数を所定倍率に変換する信号処理手段(612)を備えるとともに、前記信号処理手段にて処理されたパルス信号(Psd2)を前記電動モータに供給して前記電動モータを駆動してもよい。このように構成した場合でも、検査ヘッド一回転あたりの軸線方向に関する移動量が回転速度に拘わらず一定となる。そのため、検査ヘッドが加速中や減速中であっても検査ヘッドを軸線方向へ移動させて検査を実行することができる。
【0009】
検査ヘッドを回転駆動する回転駆動手段は種々の態様で実現できるが、その一態様として、前記回転駆動手段は、空気の流れを利用して前記検査ヘッドを前記軸線回りに回転させることができるように構成されてもよい。この場合、回転駆動手段は吹き付けられた空気を利用して前記検査ヘッドを前記軸線回りに回転させる回転力を発生させる回転力発生手段(71)と、前記回転力発生手段に対して空気を吹き付ける送風手段(73〜75)とを備えていてもよい。このような回転駆動手段は、検査ヘッドを空気を利用して回転させるものであるため、その空気の流れを利用して被検査物の内周面に付着した異物などを検査開始前に吹き飛ばすことが容易に実現できる利点を有しているが、電動モータ等で検査ヘッドを回転させる場合よりも検査ヘッドの回転速度を一定に保持することが困難である欠点を有している。
【0010】
これらの態様では、仮に検査ヘッドの回転速度が不安定であるとしても検査ヘッドの一回転あたりの軸線方向に関する移動量が一定に保持される。従って、上述した回転駆動手段の利点を生かしつつその欠点を補うことができ十分な検査精度を確保できる。回転力発生手段は種々の態様で実現できるが、例えば、前記回転力発生手段として、前記検査ヘッドに取り付けられたインペラー(71)が設けられていてもよい。
【0011】
なお、以上の説明では本発明の理解を容易にするために添付図面の参照符号を括弧書きにて付記したが、それにより本発明が図示の形態に限定されるものではない。
【発明の効果】
【0012】
以上に説明したように、本発明によれば、検査ヘッドの一回転あたりの軸線方向に関する移動量が回転速度に拘わらず一定となるので、検査ヘッドの回転速度が変動しても検査精度を悪化させることはない。そのため、検査ヘッドが加速中や減速中であっても検査を実行でき、一つの被検査物の検査に要する検査時間を短縮することができる。
【発明を実施するための最良の形態】
【0013】
(第1の形態)
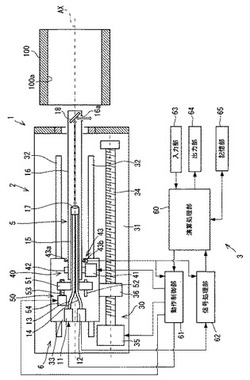
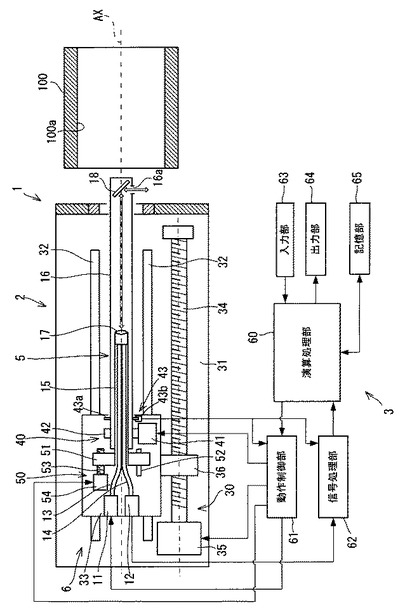
図1は、本発明の一形態に係る表面検査装置の概略構成を示している。表面検査装置1は、内燃機関のシリンダライナやシリンダボア等の被検査物100の穴100aの内周面の表面検査に適した装置である。表面検査装置1は、そのような検査を実行して穴100aの内周面に関する情報を出力する検査機構2と、検査機構2の各部の動作を制御するとともに、検査機構2が出力した情報を処理する制御部3とを備えている。更に、検査機構2は被検査物100に対して検査光を投光し、かつ被検査物100からの反射光を受光するための検出ユニット5と、その検出ユニット5に所定の動作を与えるための駆動ユニット6とを備えている。
【0014】
検出ユニット5は、検査光の光源としてのレーザダイオード(以下、LDと呼ぶ。)11と、被検査物100からの反射光を受光し、その反射光の単位時間当たりの光量(反射光強度)に応じた電流又は電圧の電気信号を出力するフォトディテクタ(以下、PDと呼ぶ。)12と、LD11から射出される検査光を被検査物100に向かって導く投光ファイバ13と、被検査物100からの反射光をPD12に導くための受光ファイバ14と、そららのファイバ13、14を束ねた状態で保持する保持筒15と、その保持筒15の外側に同軸的に設けられる中空軸状の検査ヘッド16とを備えている。保持筒15の先端には、投光ファイバ13を介して導かれた検査光を検査ヘッド16の軸線AXの方向(以下、軸線方向と呼ぶ。)に沿ってビーム状に射出させ、かつ検査ヘッド16の軸線方向に沿って検査光とは逆向きに進む反射光を受光ファイバ14に集光するレンズ17が設けられている。検査ヘッド16の先端部(図1において右端部)には、光路変更手段としてのミラー18が固定され、検査ヘッド16の外周にはそのミラー18と対向するようにして透光窓16aが設けられている。ミラー18は、レンズ17から射出された検査光の光路を透光窓16aに向けて変更し、かつ透光窓16aから検査ヘッド16内に入射した反射光の光路をレンズ17に向かって進む方向に変更する。
【0015】
駆動ユニット6は、直線駆動機構30と、回転駆動機構40と、焦点調整機構50とを備えている。直線駆動機構30は検査ヘッド16をその軸線方向に移動させる移動手段として設けられている。このような機能を実現するため、直線駆動機構30は、ベース31と、そのベース31に固定された一対のレール32と、レール32に沿って検査ヘッド16の軸線方向に移動可能なスライダ33と、そのスライダ33の側方に検査ヘッド16の軸線AXと平行に配置された送りねじ34と、その送りねじ34を回転駆動する電動モータ35とを備えている。スライダ33は検出ユニット5の全体を支持する手段として機能する。即ち、LD11及びPDはスライダ33に固定され、検査ヘッド16は回転駆動機構40を介してスライダ33に取り付けられ、保持筒15は焦点調節機構50を介してスライダ33に取り付けられている。更に、送りねじ34は、スライダ33に固定されたナット36にねじ込まれている。従って、電動モータ35にて送りねじ34を回転駆動することにより、スライダ33がレール32に沿って検査ヘッド16の軸線方向に移動し、それに伴ってスライダ33に支持された検出ユニット5の全体が検査ヘッド16の軸線方向に移動する。直線駆動機構30を用いた検出ユニット5の駆動により、被検査物100の穴100aの内周面に対する検査光の照射位置を検査ヘッド16の軸線方向に関して変化させることができる。電動モータ35はその回転軸の回転角度が入力されるパルスの数に比例するように動作する例えばステッピングモータとして構成されている。
【0016】
回転駆動機構40は検査ヘッド16を軸線AXの回りに回転させる回転駆動手段として設けられている。そのような機能を実現するため、回転駆動機構40は、検査ヘッド16を軸線AXの回りに回転自在に支持する軸受(不図示)と、回転駆動源としての電動モータ41と、その電動モータ41の回転を検査ヘッド16に伝達する伝達機構42とを備えている。伝達機構42には、ベルト伝達装置、歯車列との公知の回転伝達機構を利用してよい。電動モータ41の回転を伝達機構42を介して検査ヘッド16に伝達することにより、検査ヘッド16がその内部に固定されたミラー18を伴って軸線AXの回りに回転する。回転駆動機構40を用いた検査ヘッド16の回転により、被検査物100の穴100aの内周面に対する検査光の照射位置を周方向に関して変化させることができる。そして、検査ヘッド16の軸線方向への移動と軸線AXの回りの回転とを組合わせることにより、被検査物100の穴100aの内周面をその全面に亘って検査光で走査することが可能となる。なお、検査ヘッド16の回転時において、保持筒15は回転しない。更に、回転駆動機構40には、検査ヘッド16の回転位置に応じたパルス信号を出力するロータリーエンコーダ43が設けられている。ロータリーエンコーダ43は、検査ヘッド16に取り付けられて一体に回転し、かつ周方向に沿って所定間隔で並ぶ複数の検知孔(不図示)が形成された円板43aと、その円板43aの検知孔の位置に応じたパルスを生成するパルス生成部43bとを備える。ロータリーエンコーダ43からのパルス信号は制御部3にて利用される。
【0017】
焦点調節機構50は、検査光が被検査物100の穴100aの内周面にて焦点を結ぶように保持筒15を軸線AXの方向に駆動する焦点調節手段として設けられている。その機能を実現するため、焦点調節機構50は保持筒50の基端部に固定された支持板51と、直線駆動機構30のスライダ33と支持板51との間に配置されて支持板51を検査ヘッド16の軸線方向に案内するレール52と、検査ヘッド16の軸線AXと平行に配置されて支持板51にねじ込まれた送りねじ53と、その送りねじ53を回転駆動する電動モータ54とを備えている。電動モータ54にて送りねじ53を回転駆動することにより、支持板51がレール52に沿って移動して保持筒15が検査ヘッド16の軸線方向に移動する。これにより、検査光が被検査物100の穴100aの内周面上で焦点を結ぶようにレンズ17からミラー18を経て穴100aの内周面に至る光路の長さを調節することができる。
【0018】
制御部3は、表面検査装置1による検査工程の管理、測定結果の処理等を実行するコンピュータユニットとしての演算処理部60と、その演算処理部60の指示に従って検査機構2の各部の動作を制御する動作制御部61と、PD12の出力信号に対して所定の処理を実行する信号処理部62と、演算処理部60に対してユーザが指示を入力するための入力部63と、演算処理部60における測定結果等をユーザに提示するための出力部64と、演算処理部60にて実行すべきコンピュータプログラム、及び測定されたデータ等を記憶する記憶部65とを備えている。演算処理部60、入力部63、出力部64及び記憶部65はパーソナルコンピュータ等の汎用のコンピュータ機器を利用してこれらを構成することができる。この場合、入力部63にはキーボード、マウス等の入力機器が設けられ、出力部64にはモニタ装置が設けられる。プリンタ等の出力機器が出力部64に追加されてもよい。記憶部65には、ハードディスク記憶装置、あるいは記憶保持が可能な半導体記憶素子等の記憶装置が用いられる。
【0019】
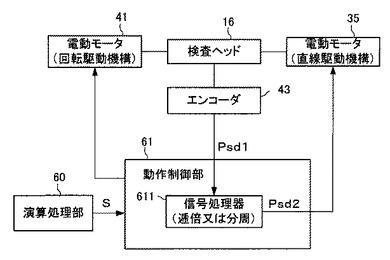
動作制御部61は、演算処理部60からの種々の制御信号に基づいて、検出ユニット5のLD11、直線駆動機構30の電動モータ35、回転駆動機構40の電動モータ41及び焦点調節機構50の電動モータ54のそれぞれの動作を制御する。なお、LD11及び電動モータ54に対する制御については、本発明の要旨ではないので詳細な説明を省略する。図2は、動作制御部61の詳細を説明する説明図である。動作制御部61は演算処理部60が出力した所定の検査開始信号Sを受信すると、LD11を所定の強度で発光させるとともに回転駆動機構40の電動モータ41を作動させて検査ヘッド16を軸線AXの回りに回転させる。その回転によって、ロータリーエンコーダ43はパルス信号Psd1を生成する。動作制御部61はそのパルス信号Psd1の周波数を信号処理器611にて所定倍率に変換、つまり逓倍又は分周する。そして、動作制御部61は所定倍率に変換された信号Psd2を直線駆動機構30の電動モータ35に供給することにより電動モータ35を駆動し、検査ヘッド16を軸線方向に直線移動させる。電動モータ35は、上述したように入力されたパルスの数に回転角度が比例するように構成されているので、検査ヘッド16の一回転あたりの直線移動量は検査ヘッド16の回転速度に拘わらず一定になる。言い換えれば、検査ヘッド16の回転速度と、直線駆動機構30による検査ヘッド16の軸線方向への移動速度(送り速度)との比が一定となる。検査ヘッド16の一回転あたりの直線移動量は、信号処理器611が逓倍又は分周する倍率を適宜に調整することで自由に設定できる。
【0020】
信号処理部62は検査ヘッド16が一回転する毎にPD12から出力される信号を所定数サンプリングするため、ロータリーエンコーダ43からのパルス信号を逓倍又は分周してサンプリングクロックとして利用する。信号処理部62にてサンプリングされた信号は演算処理部60に送られる。演算処理部60はその信号に基づいて被検査物100の穴100aの内周面に関する二次元画像を生成して鋳巣等の欠陥の有無を判定する。この判定は欠陥に対応する暗部が二次元画像に存在するか否かを判定することにより行われるが、その処理の詳細や演算処理部60が実行するその他の具体的な処理の詳細については本発明の要旨と関連性が薄いため説明を省略する。
【0021】
以上の表面検査装置1によれば、検査ヘッド16の一回転あたりの直線移動量が検査ヘッド16の回転速度に拘わらず一定になるので、検査ヘッド16の回転速度が一定しない加速中又は減速中であっても要求された検査精度で表面検査を実施できる。つまり、検査ヘッド16の回転速度と、直線駆動機構30による検査ヘッド21の送り速度とを別々に制御する形態のように、検査ヘッド16の回転速度の変動が許容範囲内に収まるまで検査ヘッド16の直線移動を止めておく必要がない。従って、その分だけ一つの被検査物100の検査に要する検査時間を短縮できる。また、検査ヘッド16の回転速度の変動が検査結果に影響しないので、検査精度を確保するために検査ヘッド16の回転速度の正確な制御が不要になる。そのため、回転駆動機構40に用いる電動モータ41として、少なくとも回転と停止とを切替えることができる簡易かつ低廉な電動モータを採用できるので、装置の小型化や低価格化を容易に実現できる。
【0022】
(第2の形態)
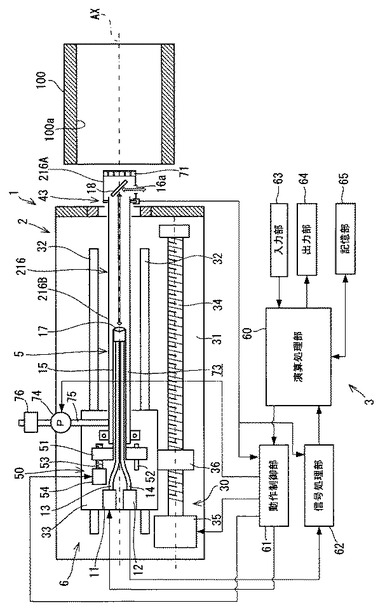
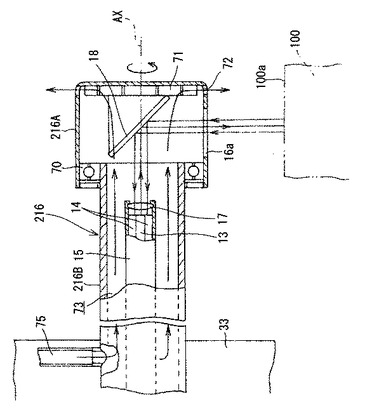
次に、本発明の第2の形態を図3〜図6を参照して説明する。この形態は、検査ヘッドの構成及び検査ヘッドを回転駆動させる構成が図1の形態と相違する。以下、図1の形態と同一の構成については各図に同一の符号を付して説明を省略する。図3及び図4に示すように、この形態の検査ヘッド216はその全体が回転するのではなく、先端に位置する回転部216Aのみが軸線AXの回りに回転するようになっている。検査ヘッド216のうち回転しない残りの部分である基部216Bはスライダ33に固定されている。図4に示すように、回転部216Aはベアリング70を介在させた状態で基部216Bに取り付けられており、回転部216Aの内部空間にはミラー18が第1の形態と同様に固定され、回転部216Aの外周にはそのミラー18と対向するようにして透光窓16aが設けられている。また、図3及び図4に示すように、この形態ではロータリーエンコーダ43が回転部216Aの回転位置に対応したパルス信号を出力するように設けられている。
【0023】
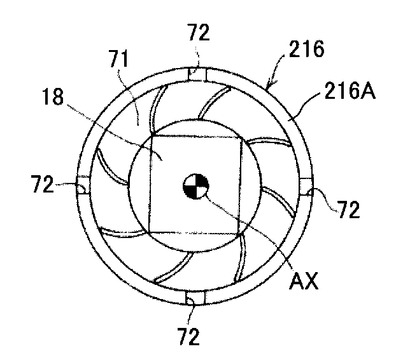
図5に詳しく示すように、第2の形態では、回転部216Aを軸線AXの回りに回転させる回転力を発生させるインペラー71が設けられている。インペラー71はミラー18の周囲を取り囲むように回転部216Aの天井部に取り付けられている。回転部216Aの外周には複数の空気噴出口72がインペラー71の周方向に並ぶようにしてそれぞれ開口している。図4に示すように、基部216Bの内周面と保持筒15の外周面との間にはインペラー71に向かって開口する送風通路73が形成されている。その送風通路73には図3にも示すようにエアポンプ74で加圧された空気を導入するための供給通路75が接続されている。エアポンプ74にはエアフィルタ76で濾過された空気が供給される。従って、エアポンプ74が作動すると、図4の矢印で示すように送風通路73にて導かれた空気がインペラー71に対して吹き付けられ、その空気は空気噴出口72から排出される。これにより、回転部216Aは軸線AX回りに回転駆動される。なお、第2の形態では、基部216Bの外周側に回転部216Aが取り付けられているが、基部216Bの内周側に回転部216Aを取り付ける形態で実施しても構わない。
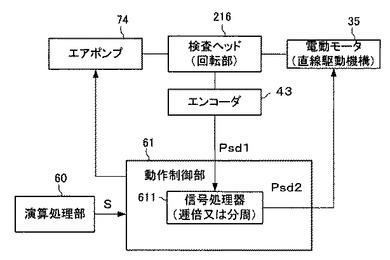
【0024】
図6は第2の形態に係る動作制御部61の動作を説明する説明図である。この図から明らかなように、動作制御部61が行う制御は、エアポンプ74を作動させて回転部216Aを回転させる点を除き、第1の形態と同一である。即ち、動作制御部61は演算処理部60が出力した所定の検査開始信号Sを受信すると、LD11を所定の強度で発光させるとともに、エアポンプ74を作動させてインペラー71に向かって空気を吹き付けることにより検査ヘッド216の回転部216Aを軸線AXの回りに回転させる。その回転によって、ロータリーエンコーダ43はパルス信号Psd1を生成する。動作制御部61はそのパルス信号Psd1の周波数を信号処理器611にて所定倍率に変換、つまり逓倍又は分周する。そして、動作制御部61は所定倍率に変換された信号Psd2を直線駆動機構30の電動モータ35に供給することにより電動モータ35を駆動し、検査ヘッド216を軸線方向に直線移動させる。これにより、第1の形態と同様の効果を奏することができる。
【0025】
特に、第2の形態に係る表面検査装置1は回転部216Aを空気の流れを利用して回転駆動するため、空気の流量を操作して回転速度を正確に制御することが不可能ではないが比較的困難である。しかし、このような制御を実行することにより、回転部216Aの回転速度を正確に制御しなくても、つまり回転部216Aが回転してさえいれば検査を実行することができ、しかも要求された検査精度を十分に確保することができる。従って、動作制御部61が実行する制御は第2の形態に係る表面検査装置1に適している。
【0026】
以上の各形態においては、ロータリーエンコーダ43が本発明に係る回転位置検出手段に、動作制御部61が本発明に係る移動制御手段に、信号処理器611が本発明に係る信号処理手段にそれぞれ相当する。そして、送りねじ34と、その送りねじ34がねじ込まれるナット36とにより本発明に係る変換機構が構成される。また、第2の形態においては、インペラー71が本発明の回転力発生手段に相当する。そして、送風通路73、エアポンプ74及び供給通路75にて本発明に係る送風手段が構成され、これらとインペラー71とにより本発明に係る回転駆動手段が構成される。
【0027】
但し、本発明は上述した各形態に限定されず、本発明の要旨の範囲内で種々の形態にて実施できる。上記の各形態では、検査ヘッド16(又は216)が支持されたスライダ33を直線駆動機構30にて移動させて、静止した被検査物100の検査を実行しているが、これとは逆に検査ヘッド16(又は216)を静止させて被検査物100を軸線方向に移動させて、被検査物100の検査を実行するようにしてもよい。被検査物100を移動させる機構は、直線駆動機構30と同様の公知の移動手段を用いればよい。
【0028】
また、上述した検査ヘッドの回転と直線移動との連動が必要でない場合には、その連動を解除して、検査ヘッドの回転速度に関わりなく自由に直線移動できるように動作制御部が直線駆動機構を制御してもよい。
【0029】
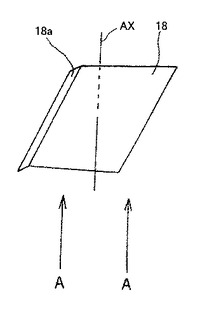
第2の形態では、回転力発生手段としてインペラー71を設けたが、例えば、図7に示すように、ミラー18のエッジから斜め方向に延びるフラップ18aを形成することによりミラー18を回転力発生手段として機能させてもよい。図7の場合、ミラー18に空気Aが吹き付けられることにより、軸線AX回りの回転力が生じ、回転部216Aを一方向に回転させることができる。
【図面の簡単な説明】
【0030】
【図1】本発明の一形態に係る表面検査装置の概略構成を示した図。
【図2】図1の動作制御部の動作を説明する説明図。
【図3】本発明の第2の形態に係る表面検査装置の概略構成を示した図。
【図4】図3の表面検査装置を部分的に拡大した拡大断面模式図。
【図5】第2の形態に係る回転部の内部を軸線方向に関して示した模式図。
【図6】第2の形態に係る動作制御部の動作を説明する説明図。
【図7】ミラーを回転力発生手段として機能させる形態を示した模式図。
【符号の説明】
【0031】
1 表面検査装置
16、216 検査ヘッド
30 直線駆動機構(移動手段)
34 送りねじ
35 電動モータ
36 ナット
40 回転駆動機構(回転駆動手段)
43 ロータリーエンコーダ(回転位置検出手段)
61 動作制御部(移動制御手段)
71 インペラー(回転力発生手段)
73 送風通路
74 エアポンプ
75 供給通路
100 被検査物
100a 穴
611 信号処理器(信号処理手段)
AX 軸線
Psa、Psd2 パルス信号
【技術分野】
【0001】
本発明は、穴が形成された被検査物の穴の内周面に存在する異物、巣、傷等の欠陥を検査する表面検査装置に関する。
【背景技術】
【0002】
穴が形成された被検査物、例えば内燃機関のシリンダライナやシリンダボア等の内周面を検査する表面検査装置として、その内周面に検査光を投光し、かつ内周面からの反射光を受け入れるように構成した棒状の検査ヘッドを穴に挿入し、その上で検査ヘッドを長手方向に延びる軸線回りに回転させつつ被検査物に対して相対的に軸線方向に進退させることにより、穴の内周面を検査できるようにしたものがある(例えば、特許文献1参照)。
【0003】
【特許文献1】特開平11−281582号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
このような表面検査装置では、被検査物の穴の内周面をムラ無く連続的に検査するために検査ヘッドの一回転あたりの軸線方向への移動量を一定に保持する必要がある。例えば、その移動量を一定に保持するために検査ヘッドの回転速度と軸線方向への移動速度とを個別に制御することが考えられる。しかし、その場合には、検査ヘッドの回転速度が一定になってからでないと検査ヘッドの軸線方向への移動を開始できない。そのため、検査ヘッドの回転速度が一定でない加速中や減速中には検査を実行することができず、その分だけ一つの被検査物に対する検査時間が長くなる。また、検査ヘッドの回転速度の変動が許容範囲内であれば検査を実施することができるが、厳密に言えばその回転速度の変動が検査結果に影響を与えるので、検査精度を悪化させる。特許文献1には、検査ヘッドを回転させて穴の内周面を環状に検査しつつ検査ヘッドを徐々に軸線方向に移動させる旨の記載があるが、検査ヘッドの回転と軸線方向への移動との関係について具体的な記載はない。
【0005】
そこで、本発明は、検査ヘッドの回転速度が変動した場合でも検査を実行することができ、検査精度を悪化せずに検査時間を短縮できる表面検査装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の表面検査装置(1)は、穴(100a)が形成された被検査物(100)の前記穴に挿入可能で、かつ長手方向に延びる軸線(AX)回りに回転可能な検査ヘッド(16)と、前記検査ヘッドが前記被検査物に対して前記軸線方向に相対移動するように前記検査ヘッド又は前記被検査物を直線移動させる移動手段(30)と、前記検査ヘッドを前記軸線の回りに回転駆動する回転駆動手段(40、71、73〜75)と、前記検査ヘッドの回転位置を検出する回転位置検出手段(43)と、前記検査ヘッドの一回転あたりの前記軸線方向に関する移動量が回転速度に拘わらず一定となるように、前記回転位置検出手段の検出結果に基づいて前記移動手段の動作を制御する移動制御手段(61)と、を備えることにより、上述した課題を解決する。
【0007】
この検査装置によれば、検査ヘッドの回転速度が一定でない加速中や減速中においても検査ヘッド一回転あたりの軸線方向に関する移動量が一定となる。そのため、検査ヘッドが加速中や減速中であっても検査ヘッドを軸線方向へ移動させて検査を実行することができるので、一つの被検査物の検査に要する検査時間を短縮することができる。そのような場合でも検査ヘッド一回転あたりの軸線方向に関する移動量は一定に保持されるので検査精度を悪化させることはない。また、検査精度を確保するために検査ヘッドの回転速度が一定保持されるように正確に制御する必要はなく検査ヘッドを回転できれば十分である。従って、検査ヘッドを回転駆動する回転駆動手段の構成に対する制約が緩和されるので、その選定の幅が拡大する。
【0008】
本発明の表面検査装置の一態様においては、前記移動手段は、入力されたパルス信号のパルスの数に回転角度が比例するように構成された電動モータ(35)と、前記電動モータの回転運動を前記検査ヘッドの前記軸線方向に関する直線運動に変換する変換機構(34、36)と、を備えており、前記回転位置検出手段は、前記検査ヘッドの回転位置に応じたパルス信号(Psa)を生成するように構成されており、かつ、前記移動制御手段は、前記回転位置検出手段が生成したパルス信号の周波数を所定倍率に変換する信号処理手段(612)を備えるとともに、前記信号処理手段にて処理されたパルス信号(Psd2)を前記電動モータに供給して前記電動モータを駆動してもよい。このように構成した場合でも、検査ヘッド一回転あたりの軸線方向に関する移動量が回転速度に拘わらず一定となる。そのため、検査ヘッドが加速中や減速中であっても検査ヘッドを軸線方向へ移動させて検査を実行することができる。
【0009】
検査ヘッドを回転駆動する回転駆動手段は種々の態様で実現できるが、その一態様として、前記回転駆動手段は、空気の流れを利用して前記検査ヘッドを前記軸線回りに回転させることができるように構成されてもよい。この場合、回転駆動手段は吹き付けられた空気を利用して前記検査ヘッドを前記軸線回りに回転させる回転力を発生させる回転力発生手段(71)と、前記回転力発生手段に対して空気を吹き付ける送風手段(73〜75)とを備えていてもよい。このような回転駆動手段は、検査ヘッドを空気を利用して回転させるものであるため、その空気の流れを利用して被検査物の内周面に付着した異物などを検査開始前に吹き飛ばすことが容易に実現できる利点を有しているが、電動モータ等で検査ヘッドを回転させる場合よりも検査ヘッドの回転速度を一定に保持することが困難である欠点を有している。
【0010】
これらの態様では、仮に検査ヘッドの回転速度が不安定であるとしても検査ヘッドの一回転あたりの軸線方向に関する移動量が一定に保持される。従って、上述した回転駆動手段の利点を生かしつつその欠点を補うことができ十分な検査精度を確保できる。回転力発生手段は種々の態様で実現できるが、例えば、前記回転力発生手段として、前記検査ヘッドに取り付けられたインペラー(71)が設けられていてもよい。
【0011】
なお、以上の説明では本発明の理解を容易にするために添付図面の参照符号を括弧書きにて付記したが、それにより本発明が図示の形態に限定されるものではない。
【発明の効果】
【0012】
以上に説明したように、本発明によれば、検査ヘッドの一回転あたりの軸線方向に関する移動量が回転速度に拘わらず一定となるので、検査ヘッドの回転速度が変動しても検査精度を悪化させることはない。そのため、検査ヘッドが加速中や減速中であっても検査を実行でき、一つの被検査物の検査に要する検査時間を短縮することができる。
【発明を実施するための最良の形態】
【0013】
(第1の形態)
図1は、本発明の一形態に係る表面検査装置の概略構成を示している。表面検査装置1は、内燃機関のシリンダライナやシリンダボア等の被検査物100の穴100aの内周面の表面検査に適した装置である。表面検査装置1は、そのような検査を実行して穴100aの内周面に関する情報を出力する検査機構2と、検査機構2の各部の動作を制御するとともに、検査機構2が出力した情報を処理する制御部3とを備えている。更に、検査機構2は被検査物100に対して検査光を投光し、かつ被検査物100からの反射光を受光するための検出ユニット5と、その検出ユニット5に所定の動作を与えるための駆動ユニット6とを備えている。
【0014】
検出ユニット5は、検査光の光源としてのレーザダイオード(以下、LDと呼ぶ。)11と、被検査物100からの反射光を受光し、その反射光の単位時間当たりの光量(反射光強度)に応じた電流又は電圧の電気信号を出力するフォトディテクタ(以下、PDと呼ぶ。)12と、LD11から射出される検査光を被検査物100に向かって導く投光ファイバ13と、被検査物100からの反射光をPD12に導くための受光ファイバ14と、そららのファイバ13、14を束ねた状態で保持する保持筒15と、その保持筒15の外側に同軸的に設けられる中空軸状の検査ヘッド16とを備えている。保持筒15の先端には、投光ファイバ13を介して導かれた検査光を検査ヘッド16の軸線AXの方向(以下、軸線方向と呼ぶ。)に沿ってビーム状に射出させ、かつ検査ヘッド16の軸線方向に沿って検査光とは逆向きに進む反射光を受光ファイバ14に集光するレンズ17が設けられている。検査ヘッド16の先端部(図1において右端部)には、光路変更手段としてのミラー18が固定され、検査ヘッド16の外周にはそのミラー18と対向するようにして透光窓16aが設けられている。ミラー18は、レンズ17から射出された検査光の光路を透光窓16aに向けて変更し、かつ透光窓16aから検査ヘッド16内に入射した反射光の光路をレンズ17に向かって進む方向に変更する。
【0015】
駆動ユニット6は、直線駆動機構30と、回転駆動機構40と、焦点調整機構50とを備えている。直線駆動機構30は検査ヘッド16をその軸線方向に移動させる移動手段として設けられている。このような機能を実現するため、直線駆動機構30は、ベース31と、そのベース31に固定された一対のレール32と、レール32に沿って検査ヘッド16の軸線方向に移動可能なスライダ33と、そのスライダ33の側方に検査ヘッド16の軸線AXと平行に配置された送りねじ34と、その送りねじ34を回転駆動する電動モータ35とを備えている。スライダ33は検出ユニット5の全体を支持する手段として機能する。即ち、LD11及びPDはスライダ33に固定され、検査ヘッド16は回転駆動機構40を介してスライダ33に取り付けられ、保持筒15は焦点調節機構50を介してスライダ33に取り付けられている。更に、送りねじ34は、スライダ33に固定されたナット36にねじ込まれている。従って、電動モータ35にて送りねじ34を回転駆動することにより、スライダ33がレール32に沿って検査ヘッド16の軸線方向に移動し、それに伴ってスライダ33に支持された検出ユニット5の全体が検査ヘッド16の軸線方向に移動する。直線駆動機構30を用いた検出ユニット5の駆動により、被検査物100の穴100aの内周面に対する検査光の照射位置を検査ヘッド16の軸線方向に関して変化させることができる。電動モータ35はその回転軸の回転角度が入力されるパルスの数に比例するように動作する例えばステッピングモータとして構成されている。
【0016】
回転駆動機構40は検査ヘッド16を軸線AXの回りに回転させる回転駆動手段として設けられている。そのような機能を実現するため、回転駆動機構40は、検査ヘッド16を軸線AXの回りに回転自在に支持する軸受(不図示)と、回転駆動源としての電動モータ41と、その電動モータ41の回転を検査ヘッド16に伝達する伝達機構42とを備えている。伝達機構42には、ベルト伝達装置、歯車列との公知の回転伝達機構を利用してよい。電動モータ41の回転を伝達機構42を介して検査ヘッド16に伝達することにより、検査ヘッド16がその内部に固定されたミラー18を伴って軸線AXの回りに回転する。回転駆動機構40を用いた検査ヘッド16の回転により、被検査物100の穴100aの内周面に対する検査光の照射位置を周方向に関して変化させることができる。そして、検査ヘッド16の軸線方向への移動と軸線AXの回りの回転とを組合わせることにより、被検査物100の穴100aの内周面をその全面に亘って検査光で走査することが可能となる。なお、検査ヘッド16の回転時において、保持筒15は回転しない。更に、回転駆動機構40には、検査ヘッド16の回転位置に応じたパルス信号を出力するロータリーエンコーダ43が設けられている。ロータリーエンコーダ43は、検査ヘッド16に取り付けられて一体に回転し、かつ周方向に沿って所定間隔で並ぶ複数の検知孔(不図示)が形成された円板43aと、その円板43aの検知孔の位置に応じたパルスを生成するパルス生成部43bとを備える。ロータリーエンコーダ43からのパルス信号は制御部3にて利用される。
【0017】
焦点調節機構50は、検査光が被検査物100の穴100aの内周面にて焦点を結ぶように保持筒15を軸線AXの方向に駆動する焦点調節手段として設けられている。その機能を実現するため、焦点調節機構50は保持筒50の基端部に固定された支持板51と、直線駆動機構30のスライダ33と支持板51との間に配置されて支持板51を検査ヘッド16の軸線方向に案内するレール52と、検査ヘッド16の軸線AXと平行に配置されて支持板51にねじ込まれた送りねじ53と、その送りねじ53を回転駆動する電動モータ54とを備えている。電動モータ54にて送りねじ53を回転駆動することにより、支持板51がレール52に沿って移動して保持筒15が検査ヘッド16の軸線方向に移動する。これにより、検査光が被検査物100の穴100aの内周面上で焦点を結ぶようにレンズ17からミラー18を経て穴100aの内周面に至る光路の長さを調節することができる。
【0018】
制御部3は、表面検査装置1による検査工程の管理、測定結果の処理等を実行するコンピュータユニットとしての演算処理部60と、その演算処理部60の指示に従って検査機構2の各部の動作を制御する動作制御部61と、PD12の出力信号に対して所定の処理を実行する信号処理部62と、演算処理部60に対してユーザが指示を入力するための入力部63と、演算処理部60における測定結果等をユーザに提示するための出力部64と、演算処理部60にて実行すべきコンピュータプログラム、及び測定されたデータ等を記憶する記憶部65とを備えている。演算処理部60、入力部63、出力部64及び記憶部65はパーソナルコンピュータ等の汎用のコンピュータ機器を利用してこれらを構成することができる。この場合、入力部63にはキーボード、マウス等の入力機器が設けられ、出力部64にはモニタ装置が設けられる。プリンタ等の出力機器が出力部64に追加されてもよい。記憶部65には、ハードディスク記憶装置、あるいは記憶保持が可能な半導体記憶素子等の記憶装置が用いられる。
【0019】
動作制御部61は、演算処理部60からの種々の制御信号に基づいて、検出ユニット5のLD11、直線駆動機構30の電動モータ35、回転駆動機構40の電動モータ41及び焦点調節機構50の電動モータ54のそれぞれの動作を制御する。なお、LD11及び電動モータ54に対する制御については、本発明の要旨ではないので詳細な説明を省略する。図2は、動作制御部61の詳細を説明する説明図である。動作制御部61は演算処理部60が出力した所定の検査開始信号Sを受信すると、LD11を所定の強度で発光させるとともに回転駆動機構40の電動モータ41を作動させて検査ヘッド16を軸線AXの回りに回転させる。その回転によって、ロータリーエンコーダ43はパルス信号Psd1を生成する。動作制御部61はそのパルス信号Psd1の周波数を信号処理器611にて所定倍率に変換、つまり逓倍又は分周する。そして、動作制御部61は所定倍率に変換された信号Psd2を直線駆動機構30の電動モータ35に供給することにより電動モータ35を駆動し、検査ヘッド16を軸線方向に直線移動させる。電動モータ35は、上述したように入力されたパルスの数に回転角度が比例するように構成されているので、検査ヘッド16の一回転あたりの直線移動量は検査ヘッド16の回転速度に拘わらず一定になる。言い換えれば、検査ヘッド16の回転速度と、直線駆動機構30による検査ヘッド16の軸線方向への移動速度(送り速度)との比が一定となる。検査ヘッド16の一回転あたりの直線移動量は、信号処理器611が逓倍又は分周する倍率を適宜に調整することで自由に設定できる。
【0020】
信号処理部62は検査ヘッド16が一回転する毎にPD12から出力される信号を所定数サンプリングするため、ロータリーエンコーダ43からのパルス信号を逓倍又は分周してサンプリングクロックとして利用する。信号処理部62にてサンプリングされた信号は演算処理部60に送られる。演算処理部60はその信号に基づいて被検査物100の穴100aの内周面に関する二次元画像を生成して鋳巣等の欠陥の有無を判定する。この判定は欠陥に対応する暗部が二次元画像に存在するか否かを判定することにより行われるが、その処理の詳細や演算処理部60が実行するその他の具体的な処理の詳細については本発明の要旨と関連性が薄いため説明を省略する。
【0021】
以上の表面検査装置1によれば、検査ヘッド16の一回転あたりの直線移動量が検査ヘッド16の回転速度に拘わらず一定になるので、検査ヘッド16の回転速度が一定しない加速中又は減速中であっても要求された検査精度で表面検査を実施できる。つまり、検査ヘッド16の回転速度と、直線駆動機構30による検査ヘッド21の送り速度とを別々に制御する形態のように、検査ヘッド16の回転速度の変動が許容範囲内に収まるまで検査ヘッド16の直線移動を止めておく必要がない。従って、その分だけ一つの被検査物100の検査に要する検査時間を短縮できる。また、検査ヘッド16の回転速度の変動が検査結果に影響しないので、検査精度を確保するために検査ヘッド16の回転速度の正確な制御が不要になる。そのため、回転駆動機構40に用いる電動モータ41として、少なくとも回転と停止とを切替えることができる簡易かつ低廉な電動モータを採用できるので、装置の小型化や低価格化を容易に実現できる。
【0022】
(第2の形態)
次に、本発明の第2の形態を図3〜図6を参照して説明する。この形態は、検査ヘッドの構成及び検査ヘッドを回転駆動させる構成が図1の形態と相違する。以下、図1の形態と同一の構成については各図に同一の符号を付して説明を省略する。図3及び図4に示すように、この形態の検査ヘッド216はその全体が回転するのではなく、先端に位置する回転部216Aのみが軸線AXの回りに回転するようになっている。検査ヘッド216のうち回転しない残りの部分である基部216Bはスライダ33に固定されている。図4に示すように、回転部216Aはベアリング70を介在させた状態で基部216Bに取り付けられており、回転部216Aの内部空間にはミラー18が第1の形態と同様に固定され、回転部216Aの外周にはそのミラー18と対向するようにして透光窓16aが設けられている。また、図3及び図4に示すように、この形態ではロータリーエンコーダ43が回転部216Aの回転位置に対応したパルス信号を出力するように設けられている。
【0023】
図5に詳しく示すように、第2の形態では、回転部216Aを軸線AXの回りに回転させる回転力を発生させるインペラー71が設けられている。インペラー71はミラー18の周囲を取り囲むように回転部216Aの天井部に取り付けられている。回転部216Aの外周には複数の空気噴出口72がインペラー71の周方向に並ぶようにしてそれぞれ開口している。図4に示すように、基部216Bの内周面と保持筒15の外周面との間にはインペラー71に向かって開口する送風通路73が形成されている。その送風通路73には図3にも示すようにエアポンプ74で加圧された空気を導入するための供給通路75が接続されている。エアポンプ74にはエアフィルタ76で濾過された空気が供給される。従って、エアポンプ74が作動すると、図4の矢印で示すように送風通路73にて導かれた空気がインペラー71に対して吹き付けられ、その空気は空気噴出口72から排出される。これにより、回転部216Aは軸線AX回りに回転駆動される。なお、第2の形態では、基部216Bの外周側に回転部216Aが取り付けられているが、基部216Bの内周側に回転部216Aを取り付ける形態で実施しても構わない。
【0024】
図6は第2の形態に係る動作制御部61の動作を説明する説明図である。この図から明らかなように、動作制御部61が行う制御は、エアポンプ74を作動させて回転部216Aを回転させる点を除き、第1の形態と同一である。即ち、動作制御部61は演算処理部60が出力した所定の検査開始信号Sを受信すると、LD11を所定の強度で発光させるとともに、エアポンプ74を作動させてインペラー71に向かって空気を吹き付けることにより検査ヘッド216の回転部216Aを軸線AXの回りに回転させる。その回転によって、ロータリーエンコーダ43はパルス信号Psd1を生成する。動作制御部61はそのパルス信号Psd1の周波数を信号処理器611にて所定倍率に変換、つまり逓倍又は分周する。そして、動作制御部61は所定倍率に変換された信号Psd2を直線駆動機構30の電動モータ35に供給することにより電動モータ35を駆動し、検査ヘッド216を軸線方向に直線移動させる。これにより、第1の形態と同様の効果を奏することができる。
【0025】
特に、第2の形態に係る表面検査装置1は回転部216Aを空気の流れを利用して回転駆動するため、空気の流量を操作して回転速度を正確に制御することが不可能ではないが比較的困難である。しかし、このような制御を実行することにより、回転部216Aの回転速度を正確に制御しなくても、つまり回転部216Aが回転してさえいれば検査を実行することができ、しかも要求された検査精度を十分に確保することができる。従って、動作制御部61が実行する制御は第2の形態に係る表面検査装置1に適している。
【0026】
以上の各形態においては、ロータリーエンコーダ43が本発明に係る回転位置検出手段に、動作制御部61が本発明に係る移動制御手段に、信号処理器611が本発明に係る信号処理手段にそれぞれ相当する。そして、送りねじ34と、その送りねじ34がねじ込まれるナット36とにより本発明に係る変換機構が構成される。また、第2の形態においては、インペラー71が本発明の回転力発生手段に相当する。そして、送風通路73、エアポンプ74及び供給通路75にて本発明に係る送風手段が構成され、これらとインペラー71とにより本発明に係る回転駆動手段が構成される。
【0027】
但し、本発明は上述した各形態に限定されず、本発明の要旨の範囲内で種々の形態にて実施できる。上記の各形態では、検査ヘッド16(又は216)が支持されたスライダ33を直線駆動機構30にて移動させて、静止した被検査物100の検査を実行しているが、これとは逆に検査ヘッド16(又は216)を静止させて被検査物100を軸線方向に移動させて、被検査物100の検査を実行するようにしてもよい。被検査物100を移動させる機構は、直線駆動機構30と同様の公知の移動手段を用いればよい。
【0028】
また、上述した検査ヘッドの回転と直線移動との連動が必要でない場合には、その連動を解除して、検査ヘッドの回転速度に関わりなく自由に直線移動できるように動作制御部が直線駆動機構を制御してもよい。
【0029】
第2の形態では、回転力発生手段としてインペラー71を設けたが、例えば、図7に示すように、ミラー18のエッジから斜め方向に延びるフラップ18aを形成することによりミラー18を回転力発生手段として機能させてもよい。図7の場合、ミラー18に空気Aが吹き付けられることにより、軸線AX回りの回転力が生じ、回転部216Aを一方向に回転させることができる。
【図面の簡単な説明】
【0030】
【図1】本発明の一形態に係る表面検査装置の概略構成を示した図。
【図2】図1の動作制御部の動作を説明する説明図。
【図3】本発明の第2の形態に係る表面検査装置の概略構成を示した図。
【図4】図3の表面検査装置を部分的に拡大した拡大断面模式図。
【図5】第2の形態に係る回転部の内部を軸線方向に関して示した模式図。
【図6】第2の形態に係る動作制御部の動作を説明する説明図。
【図7】ミラーを回転力発生手段として機能させる形態を示した模式図。
【符号の説明】
【0031】
1 表面検査装置
16、216 検査ヘッド
30 直線駆動機構(移動手段)
34 送りねじ
35 電動モータ
36 ナット
40 回転駆動機構(回転駆動手段)
43 ロータリーエンコーダ(回転位置検出手段)
61 動作制御部(移動制御手段)
71 インペラー(回転力発生手段)
73 送風通路
74 エアポンプ
75 供給通路
100 被検査物
100a 穴
611 信号処理器(信号処理手段)
AX 軸線
Psa、Psd2 パルス信号
【特許請求の範囲】
【請求項1】
穴が形成された被検査物の前記穴に挿入可能で、かつ長手方向に延びる軸線回りに回転可能な検査ヘッドと、前記検査ヘッドが前記被検査物に対して前記軸線方向に相対移動するように前記検査ヘッド又は前記被検査物を直線移動させる移動手段と、前記検査ヘッドを前記軸線の回りに回転駆動する回転駆動手段と、前記検査ヘッドの回転位置を検出する回転位置検出手段と、前記検査ヘッドの一回転あたりの前記軸線方向に関する移動量が回転速度に拘わらず一定となるように、前記回転位置検出手段の検出結果に基づいて前記移動手段の動作を制御する移動制御手段と、を備えることを特徴とする表面検査装置。
【請求項2】
前記移動手段は、入力されたパルス信号のパルスの数に回転角度が比例するように構成された電動モータと、前記電動モータの回転運動を前記検査ヘッドの前記軸線方向に関する直線運動に変換する変換機構と、を備えており、
前記回転位置検出手段は、前記検査ヘッドの回転位置に応じたパルス信号を生成するように構成されており、かつ、
前記移動制御手段は、前記回転位置検出手段が生成したパルス信号の周波数を所定倍率に変換する信号処理手段を備えるとともに、前記信号処理手段にて処理されたパルス信号を前記電動モータに供給して前記電動モータを駆動することを特徴とする請求項1に記載の表面検査装置。
【請求項3】
前記回転駆動手段は、空気の流れを利用して前記検査ヘッドを前記軸線回りに回転させることができるように構成されていることを特徴とする請求項1又は2に記載の表面検査装置。
【請求項4】
前記回転駆動手段は、吹き付けられた空気を利用して前記検査ヘッドを前記軸線回りに回転させる回転力を発生させる回転力発生手段と、前記回転力発生手段に対して空気を吹き付ける送風手段とを備えることを特徴とする請求項3に記載の表面検査装置。
【請求項5】
前記回転力発生手段として、前記検査ヘッドに取り付けられたインペラーが設けられていることを特徴とする請求項4に記載の表面検査装置。
【請求項1】
穴が形成された被検査物の前記穴に挿入可能で、かつ長手方向に延びる軸線回りに回転可能な検査ヘッドと、前記検査ヘッドが前記被検査物に対して前記軸線方向に相対移動するように前記検査ヘッド又は前記被検査物を直線移動させる移動手段と、前記検査ヘッドを前記軸線の回りに回転駆動する回転駆動手段と、前記検査ヘッドの回転位置を検出する回転位置検出手段と、前記検査ヘッドの一回転あたりの前記軸線方向に関する移動量が回転速度に拘わらず一定となるように、前記回転位置検出手段の検出結果に基づいて前記移動手段の動作を制御する移動制御手段と、を備えることを特徴とする表面検査装置。
【請求項2】
前記移動手段は、入力されたパルス信号のパルスの数に回転角度が比例するように構成された電動モータと、前記電動モータの回転運動を前記検査ヘッドの前記軸線方向に関する直線運動に変換する変換機構と、を備えており、
前記回転位置検出手段は、前記検査ヘッドの回転位置に応じたパルス信号を生成するように構成されており、かつ、
前記移動制御手段は、前記回転位置検出手段が生成したパルス信号の周波数を所定倍率に変換する信号処理手段を備えるとともに、前記信号処理手段にて処理されたパルス信号を前記電動モータに供給して前記電動モータを駆動することを特徴とする請求項1に記載の表面検査装置。
【請求項3】
前記回転駆動手段は、空気の流れを利用して前記検査ヘッドを前記軸線回りに回転させることができるように構成されていることを特徴とする請求項1又は2に記載の表面検査装置。
【請求項4】
前記回転駆動手段は、吹き付けられた空気を利用して前記検査ヘッドを前記軸線回りに回転させる回転力を発生させる回転力発生手段と、前記回転力発生手段に対して空気を吹き付ける送風手段とを備えることを特徴とする請求項3に記載の表面検査装置。
【請求項5】
前記回転力発生手段として、前記検査ヘッドに取り付けられたインペラーが設けられていることを特徴とする請求項4に記載の表面検査装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2007−315804(P2007−315804A)
【公開日】平成19年12月6日(2007.12.6)
【国際特許分類】
【出願番号】特願2006−143188(P2006−143188)
【出願日】平成18年5月23日(2006.5.23)
【出願人】(390014661)キリンテクノシステム株式会社 (126)
【出願人】(505216449)株式会社 KTSオプティクス (17)
【Fターム(参考)】
【公開日】平成19年12月6日(2007.12.6)
【国際特許分類】
【出願日】平成18年5月23日(2006.5.23)
【出願人】(390014661)キリンテクノシステム株式会社 (126)
【出願人】(505216449)株式会社 KTSオプティクス (17)
【Fターム(参考)】
[ Back to top ]