
表面検査装置
【課題】欠陥の種類等に応じて様々な感度特性を作り出すことができる表面検査装置を提供する。
【解決手段】表面検査装置1は、レーザダイオード11から投光ファイバ13を介して被検査物100の内周面100aに検査光を照射し、その検査光の反射光の強度を検出する検出ユニット5を有する。検出ユニットは、投光ファイバ13の周囲に配置された第1受光ファイバ群14Aと、それよりも外側に配置された第2受光ファイバ群14Bと、これらのファイバ群のそれぞれに接続されたフォトディテクタ12A、12Bとを備える。
【解決手段】表面検査装置1は、レーザダイオード11から投光ファイバ13を介して被検査物100の内周面100aに検査光を照射し、その検査光の反射光の強度を検出する検出ユニット5を有する。検出ユニットは、投光ファイバ13の周囲に配置された第1受光ファイバ群14Aと、それよりも外側に配置された第2受光ファイバ群14Bと、これらのファイバ群のそれぞれに接続されたフォトディテクタ12A、12Bとを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、被検査物の表面に照射した検査光の反射光の強度を検出し、検出された反射光の強度に基づいて被検査物の表面を検査する表面検査装置装置に関する。
【背景技術】
【0002】
円筒状の被検査物の内周面を検査する装置として、軸状の検査ヘッドをその軸線の回りに回転させつつ軸線方向に送り出して被検査物の内部に検査ヘッドを挿入し、その検査ヘッドの外周から検査光を被検査物に照射してその被検査物の内周面をその軸線方向の一旦から他端まで逐次走査し、その走査に対応した被検査物からの反射光を検査ヘッドを介して受光し、その受光した反射光の強度に基づいて被検査物の状態、例えば欠陥等の有無を判別する表面検査装置が知られている(例えば、特許文献1参照)。
【0003】
【特許文献1】特開平11−281582号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
特許文献1の表面検査装置は、検査光を投光する投光ファイバの回りに反射光を受光する複数の受光ファイバを隣接させてこれらの光ファイバをファイバ保持筒で保持するようにした検出手段を有している。この検出手段は投光ファイバと受光ファイバとの距離等の位置関係が固定されているので、反射光の方向や強さ等の反射光の性状変化に対する検出手段の感度特性も固定される。反射光の性状は被検査物に存在する欠陥の種類に応じて特徴付けられるので、従来の表面検査装置では、被検査物から発見すべき欠陥を検知できる感度特性を検出手段が持つように受光ファイバの位置等が設定される。
【0005】
このように、従来の表面検査装置では検出手段の感度特性が発見すべき欠陥を検知できる感度特性に固定されているので、例えば、発見すべき欠陥の種類が変わった場合にその欠陥を十分に検知できないことや、欠陥と区別すべき箇所が新たに設定された場合にその箇所を欠陥として誤検出する等の問題がある。
【0006】
そこで、本発明は、欠陥の種類等に応じて様々な感度特性を作り出すことができる表面検査装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の表面検査装置(1)は、光源(11)から投光ファイバ(13)を介して被検査物(100)の表面(100a)に検査光を照射し、その検査光の反射光の強度を検出する検出手段(5)を有し、前記検出手段の検出結果に基づいて前記被検査物の表面を検査する表面検査装置において、前記検出手段は、前記投光ファイバの周囲に配置されて前記反射光を導くことができる複数の受光ファイバ(14)からなる第1の受光ファイバ群(14A)と、前記投光ファイバから見て前記第1の受光ファイバ群よりも外側に配置されて前記反射光を導くことができる複数の受光ファイバ(14)からなる第2の受光ファイバ群(14B)と、前記第1の受光ファイバ群にて導かれた反射光の強度に対応した信号を出力する第1の光電変換手段(12A)と、前記第2の受光ファイバ群にて導かれた反射光の強度に対応した信号を出力する第2の光電変換手段(12B)と、を備えることにより上述した課題を解決する。
【0008】
この検査装置によれば、第1の受光ファイバ群の外側に第2の受光ファイバ群が配置されており、これらのファイバ群は投光ファイバとの位置関係が互いに相違する。そのため、一つの検出手段が互いに相違する複数の感度特性を有することになる。従って、検知すべき欠陥の種類に応じて第1の光電変換手段の信号と第2の光電変換手段の信号とを使い分けたり、あるいはこれらの信号を組合わせることにより、様々な感度特性を作り出すことが可能となる。
【0009】
本発明の検査装置の一態様においては、前記第1の光電変換手段から出力された第1の信号(Ps1)と前記第2の光電変換手段から出力された第2の信号(Ps2)とを所定の演算則に基づいて組み合わせる合成処理手段(601)と、前記検出手段の感度が所定の感度特性となるように前記所定の演算則を設定する演算則設定手段(602)と、を更に備えてもよい。演算則設定手段が設定する演算則に制限はない。また演算則設定手段が複数種類の演算則を予め保持しておきそれらの中から適当な演算則を選択して設定してもよい。例えば、第1の信号と第2の信号とを単純に加算する演算則を設定することにより、それぞれのファイバ群の受光面積を合計した受光面積を持つ受光ファイバ群を設けた場合、つまり受光ファイバの径を拡大した場合と略同等な感度特性を得ることができる。
【0010】
ところで、被検査物が鋳造品でかつ検査する表面が切削加工されている場合には、鋳造品の表面に現れる鋳巣を欠陥として検知すると同時に、切削加工によって表面に形成されるわずかな窪みを欠陥たる鋳巣と区別することが要請される。表面に鋳巣が存在する場合には、鋳巣に検査光を照射しても殆ど反射しないため反射光の強度は下がる。一方、表面に形成される窪みは反射光の方向を変化させる。そのため反射光の角度変化に関する検出手段の感度が敏感であると、つまり反射光の角度範囲に対して許容範囲が狭い感度特性であると、検出手段は表面の窪みで反射した反射光を受光できない場合がある。これにより、受光する反射光の強度が下がり鋳巣と窪みとの区別が付きにくくなる。
【0011】
そこで、本発明の検査装置の一態様においては、前記演算則設定手段は、前記被検査物の表面からの反射光の角度変化に関する前記検出手段の感度が所定範囲内の角度変化に対して略平坦な感度特性となるように前記所定の演算則を設定してもよい。この場合、窪みからの反射光の角度変化幅に対応して所定範囲を設定すれば、その範囲内の感度特性が略平坦であるので、窪みからの反射光を窪みのない表面からの反射光と同等の強度で受光できるようになる。従って、鋳巣と窪みとの区別が明確になり検査精度が向上する。
【0012】
第1及び第2の受光ファイバ群のそれぞれの反射光の角度変化に関する感度特性は、これらの光ファイバ群の間隔、各ファイバ群と投光ファイバとの距離、これらのファイバ群を構成する受光ファイバの径の大きさ等の物理的構成に依存する。従って、このような平坦な感度特性を得るための演算則は、反射光の角度変化に関する第1の受光ファイバ群の感度特性と第2の受光ファイバ群の感度特性とを考慮して適宜に設定される。例えば、前記演算則設定手段は、前記所定の演算則として、前記第2の信号に所定値を乗じたものを前記第1の信号に加算する演算則を設定してもよい。このような演算則によっても略平坦な感度特性を得ることができる。
【0013】
ところで、被検査物の表面が切削加工されたものである場合、その切削加工による切粉が表面に付着することがあり、その切粉の存在を欠陥として検知する要請がある。切粉に照射された検査光が殆ど反射しない場合や反射光の方向が大きく外れる場合などには、受光される反射光の強度が低下するので切粉の検出が可能である。しかし、切粉は一様な形状でないので、切粉に照射された検査光が正常な表面と同様に反射する場合には、切粉の存在を見過ごすおそれがある。
【0014】
そこで、本発明の検査装置の一態様においては、前記演算則設定手段は、前記被検査物の反射位置までの距離変化に関する前記検出手段の感度が所定の距離だけ反射位置が近くなった場合に負のピークを持つ感度特性となるように前記所定の演算則を設定してもよい。これによれば、例えば所定の距離を切粉の平均的寸法に設定することにより、切粉の存在により受光される反射光の強度が負の値となって切粉の検知が可能となるので、切粉の存在を見過ごす危険性が減じられる。このような感度特性を得るための演算則は、上述のように検出手段の物理的構成に依存するので、被検査物の反射位置までの距離変化に関する第1の受光ファイバ群による感度特性と第2の受光ファイバ群の感度特性とを考慮して適宜に設定される。例えば、前記演算則設定手段は、前記所定の演算則として、前記第1の信号から前記第2の信号を減算する演算則を設定してもよい。このような演算則によっても所定の距離だけ反射位置が近くなった場合に負のピークを持つ感度特性を得ることができる。
【0015】
本発明の検査装置は、被検査物の平面状の表面を検査する装置として構成してもよいし、非平面状の表面を検査する装置として構成してもよい。例えば、前記被検査物の前記表面として円筒状の内周面(100a)が設けられ、前記検出手段は、軸状に延びる検査ヘッド(16)の外周から前記円筒体の内周面に向かって検査光を照射するとともに、前記検査ヘッドを軸線方向に移動させる直線駆動手段(30)と、前記検査ヘッドをその軸線の回りに回転させる回転駆動手段(40)とを更に備えてもよい。
【0016】
なお、以上の説明では本発明の理解を容易にするために添付図面の参照符号を括弧書きにて付記したが、それにより本発明が図示の形態に限定されるものではない。
【発明の効果】
【0017】
以上に説明したように、本発明によれば、第1の受光ファイバ群の外側に第2の受光ファイバ群が配置されており、これらのファイバ群は投光ファイバとの位置関係が互いに相違するため、一つの検出手段が互いに相違する複数の感度特性を有することになる。従って、検知すべき欠陥の種類に応じて第1の光電変換手段の信号と第2の光電変換手段の信号とを使い分けたり、あるいはこれらの信号を組合わせることにより、様々な感度特性を作り出すことが可能となる。
【発明を実施するための最良の形態】
【0018】
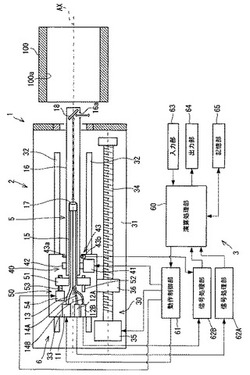
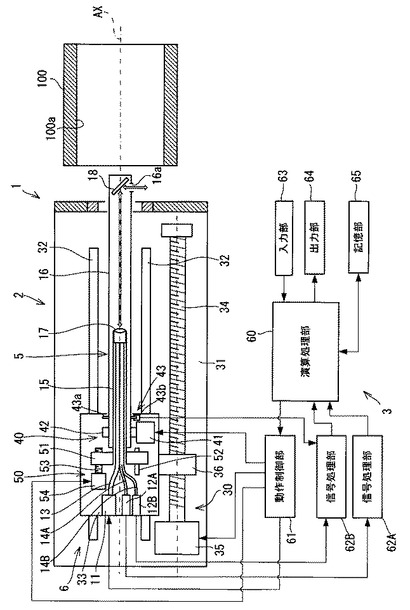
図1は、本発明の一形態に係る表面検査装置の概略構成を示している。表面検査装置1は、被検査物100の円筒体の内周面100aの検査に適した装置である。表面検査装置1は、そのような検査を実行して被検査物100の内周面100aに関する情報を出力する検査機構2と、検査機構2の各部の動作を制御するとともに、検査機構2が出力した情報を処理する制御部3とを備えている。更に、検査機構2は被検査物100に対して検査光を投光し、かつ被検査物100からの反射光を受光するための検出ユニット5と、その検出ユニット5に所定の動作を与えるための駆動ユニット6とを備えている。
【0019】
検出ユニット5は、検査光の光源としてのレーザダイオード(以下、LDと呼ぶ。)11と、被検査物100からの反射光を受光し、その反射光の単位時間当たりの光量(反射光強度)に応じた電流又は電圧の電気信号を出力する二つのフォトディテクタ(以下、PDと呼ぶ。)12A、12Bと、LD11から射出される検査光を被検査物100に向かって導く投光ファイバ13と、被検査物100からの反射光をPD12Aに導くための第1受光ファイバ群14Aと、被検査物100からの反射光をPD12Bに導くための第2受光ファイバ群14Bと、そららの投光ファイバ13及び受光ファイバ群14A、14Bを束ねた状態で保持する保持筒15と、その保持筒15の外側に同軸的に設けられる中空軸状の検査ヘッド16とを備えている。
【0020】
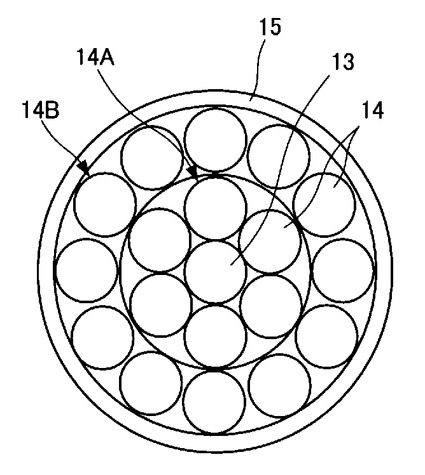
図2は、保持筒15にて保持された投光ファイバ13及び受光ファイバ群14A、14Bの先端部(図1において右端部)を示している。投光ファイバ13は保持筒15の中心線上に配置されており、第1受光ファイバ群14Aはその投光ファイバ13の周囲に配置された6本の受光ファイバ14からなる。また第2受光ファイバ群14Bは投光ファイバ13から見て第1受光ファイバ群14Aの外側に配置された12本の受光ファイバ14からなる。投光ファイバ13と各受光ファイバ群14A、14Bを構成する受光ファイバ14とは、図示しない樹脂系接着剤等の接合手段で互いに固定されており、位置ずれが防止されている。なお、第1受光ファイバ群14A及び第2受光ファイバ群14Bをそれぞれ構成する受光ファイバ14の本数に制限はなく、適宜の本数を採用してよい。
【0021】
図1に示すように、保持筒15の先端には、投光ファイバ13を介して導かれた検査光を検査ヘッド16の軸線AXの方向(以下、軸線方向と呼ぶ。)に沿ってビーム状に射出させ、かつ検査ヘッド16の軸線方向に沿って検査光とは逆向きに進む反射光を受光ファイバ14に集光するレンズ17が設けられている。検査ヘッド16の先端部(図1において右端部)には、光路変更手段としてのミラー18が固定され、検査ヘッド16の外周にはそのミラー18と対向するようにして透光窓16aが設けられている。ミラー18は、レンズ17から射出された検査光の光路を透光窓16aに向けて変更し、かつ透光窓16aから検査ヘッド16内に入射した反射光の光路をレンズ17に向かって進む方向に変更する。
【0022】
駆動ユニット6は、直線駆動機構30と、回転駆動機構40と、焦点調整機構50とを備えている。直線駆動機構30は検査ヘッド16をその軸線方向に移動させる移動手段として設けられている。このような機能を実現するため、直線駆動機構30は、ベース31と、そのベース31に固定された一対のレール32と、レール32に沿って検査ヘッド16の軸線方向に移動可能なスライダ33と、そのスライダ33の側方に検査ヘッド16の軸線AXと平行に配置された送りねじ34と、その送りねじ34を回転駆動する電動モータ35とを備えている。スライダ33は検出ユニット5の全体を支持する手段として機能する。即ち、LD11及びPD12A、12Bはスライダ33に固定され、検査ヘッド16は回転駆動機構40を介してスライダ33に取り付けられ、保持筒15は焦点調節機構50を介してスライダ33に取り付けられている。更に、送りねじ34は、スライダ33に固定されたナット36にねじ込まれている。従って、電動モータ35にて送りねじ34を回転駆動することにより、スライダ33がレール32に沿って検査ヘッド16の軸線方向に移動し、それに伴ってスライダ33に支持された検出ユニット5の全体が検査ヘッド16の軸線方向に移動する。直線駆動機構30を用いた検出ユニット5の駆動により、被検査物100の内周面100aに対する検査光の照射位置を検査ヘッド16の軸線方向に関して変化させることができる。
【0023】
回転駆動機構40は検査ヘッド16を軸線AXの回りに回転させる回転駆動手段として設けられている。そのような機能を実現するため、回転駆動機構40は、検査ヘッド16を軸線AXの回りに回転自在に支持する軸受(不図示)と、回転駆動源としての電動モータ41と、その電動モータ41の回転を検査ヘッド16に伝達する伝達機構42とを備えている。伝達機構42には、ベルト伝達装置、歯車列との公知の回転伝達機構を利用してよい。電動モータ41の回転を伝達機構42を介して検査ヘッド16に伝達することにより、検査ヘッド16がその内部に固定されたミラー18を伴って軸線AXの回りに回転する。回転駆動機構40を用いた検査ヘッド16の回転により、被検査物100の内周面100aに対する検査光の照射位置を周方向に関して変化させることができる。そして、検査ヘッド16の軸線方向への移動と軸線AXの回りの回転とを組合わせることにより、被検査物100の内周面100aをその全面に亘って検査光で走査することが可能となる。なお、検査ヘッド16の回転時において、保持筒15は回転しない。更に、回転駆動機構40には、検査ヘッド16の回転位置に応じたパルス信号を出力するロータリーエンコーダ43が設けられている。ロータリーエンコーダ43は、検査ヘッド16に取り付けられて一体に回転し、かつ周方向に沿って所定間隔で並ぶ複数の検知孔(不図示)が形成された円板43aと、その円板43aの検知孔の位置に応じたパルスを生成するパルス生成部43bとを備える。ロータリーエンコーダ43からのパルス信号は制御部3にて利用される。
【0024】
焦点調節機構50は、検査光が被検査物100の内周面100aにて焦点を結び、かつ内周面100aからの反射光が第1受光ファイバ群14A又は第2受光ファイバ群14のいずれか一方で焦点を結ぶように保持筒15を軸線AXの方向に駆動する焦点調節手段として設けられている。その機能を実現するため、焦点調節機構50は保持筒50の基端部に固定された支持板51と、直線駆動機構30のスライダ33と支持板51との間に配置されて支持板51を検査ヘッド16の軸線方向に案内するレール52と、検査ヘッド16の軸線AXと平行に配置されて支持板51にねじ込まれた送りねじ53と、その送りねじ53を回転駆動する電動モータ54とを備えている。電動モータ54にて送りねじ53を回転駆動することにより、支持板51がレール52に沿って移動して保持筒15が検査ヘッド16の軸線方向に移動する。これにより、検査光が被検査物100の内周面100a上で焦点を結び、かつ内周面100aからの反射光が第1受光ファイバ群14A又は第2受光ファイバ群14Bのいずれか一方で焦点を結ぶようにレンズ17からミラー18を経て内周面100aに至る光路の長さを調節することができる。
【0025】
次に制御部3について説明する。制御部3は、表面検査装置1による検査工程の管理、測定結果の処理等を実行するコンピュータユニットとしての演算処理部60と、その演算処理部60の指示に従って検査機構2の各部の動作を制御する動作制御部61と、PD12Aの出力信号に対して所定の処理を実行する信号処理部62Aと、PD12Aの出力信号に対して所定の処理を実行する信号処理部62Bと、演算処理部60に対してユーザが指示を入力するための入力部63と、演算処理部60における測定結果等をユーザに提示するための出力部64と、演算処理部60にて実行すべきコンピュータプログラム、及び測定されたデータ等を記憶する記憶部65とを備えている。演算処理部60、入力部63、出力部64及び記憶部65はパーソナルコンピュータ等の汎用のコンピュータ機器を利用してこれらを構成することができる。この場合、入力部63にはキーボード、マウス等の入力機器が設けられ、出力部64にはモニタ装置が設けられる。プリンタ等の出力機器が出力部64に追加されてもよい。記憶部65には、ハードディスク記憶装置、あるいは記憶保持が可能な半導体記憶素子等の記憶装置が用いられる。動作制御部61及び信号処理部62A、62Bはハードウエア制御回路によって実現されてもよいし、コンピュータユニットによって実現されてもよい。
【0026】
以下では、内周面100aが切削加工された鋳造品を被検査物100とした場合に好適な形態を例示する。表面検査装置1が実行できる検査モードには、被検査物100の表面としての内周面100aに現れた鋳巣等の表面自体の欠陥を検出する表面欠陥検査モードと、被検査物100の表面に付着した切粉等の異物を欠陥として検出する付着異物検査モードとがそれぞれ設定されており、ユーザによる入力部63からの指示に応じて各検査モードを選択できるように構成されている。なお、これらの検査モードに応じて演算処理部60及び動作制御部61の動作がそれぞれ異なるが、まずは各モードに共通する動作を説明する。
【0027】
被検査物100の内周面100aの表面を検査する場合、被検査物100は検査ヘッド16と同軸上に配置される。検査の開始にあたって、演算処理部60は入力部63からの指示に従って動作制御部61に被検査物100の内周面100aを検査するために必要な動作の開始を指示する。その指示を受けた動作制御部61は、LD11を所定の強度で発光させるとともに、検査ヘッド16が軸線方向に移動し、かつ軸線AXの回りに一定速度で回転するようにモータ35及びモータ41の動作を制御する。そして、ユーザの指示により表面欠陥検査モードが選択された場合には、動作制御部61は検査光が内周面100a上で焦点を結び、かつ内周面100aからの反射光が第2受光ファイバ群14Bに焦点を結ぶようにモータ54の動作を制御する。一方、表面欠陥検査モードが選択された場合には、動作制御部61は検査光が内周面100a上で焦点を結び、かつ内周面100aからの反射光が第1受光ファイバ群14Aに焦点を結ぶようにモータ54の動作を制御する。このような動作制御により、内周面100aがその一端から他端まで検査光によって走査される。
【0028】
その走査に連係して信号処理部62AにはPD12Aの出力信号が、信号処理部62BにはPD12Bの出力信号がそれぞれ順次導かれる。信号処理部62Aは、PD12Aの出力信号を演算処理部60にて処理するために必要なアナログ信号処理を実施し、更にその処理後のアナログ信号を所定のビット数でA/D変換し、得られたデジタル信号を反射光信号として演算処理部60に出力する。信号処理部62Aが行うA/D変換は、ロータリーエンコーダ43から出力されるパルス列をサンプリングクロック信号として利用して行われる。これにより、検査ヘッド16が所定角度回転する間のPD12の受光量(強度)に相関した階調のデジタル信号が生成されて信号処理部62Aから出力される。PD12Bの出力信号が入力される信号処理部62Bも上記と同様に機能する。
【0029】
各信号処理部62A、62Bから反射光信号を受け取った演算処理部60は、信号処理部62Aからの信号と、信号処理部62Bからの信号とを互いに区別できる状態で記憶部65に記憶する。更に、演算処理部60は記憶部65が記憶する反射光信号を利用して被検査物100の内周面100aを平面的に展開した2次元画像を生成し、その2次元画像に基づいて欠陥の有無を判定し、その判定結果としての検査結果を出力部64に出力する。
【0030】
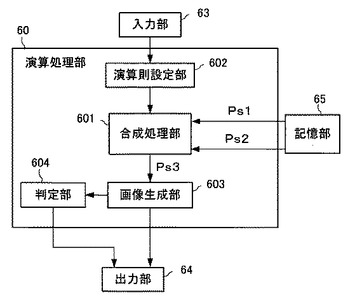
次に、演算処理部60がこのような2次元画像を生成し、その2次元画像に基づいて検査結果を出力するプロセスについて図3を参照して説明する。図3は演算処理部60の機能を説明するブロック図である。演算処理部60は記憶部65が記憶する所定のプログラムを実行することにより、図3に示した合成処理部601、演算則設定部602、画像生成部603及び判定部604としてそれぞれ機能する。まず、演算処理部60は、記憶部65が記憶するPD12Aの出力信号を基礎とした反射光信号Ps1と、PD12Aの出力信号を基礎とした反射光信号Ps2とを合成処理部601にそれぞれ読み込む。次に、その合成処理部601は、これらの信号Ps1、Ps2を演算則設定部602が設定する演算則に従って組合わせ、その合成信号を画像生成部603に出力する。演算則設定部602は、上述した表面欠陥検査モードに対応する演算則と、表面異物検査モードに対応する演算則とをそれぞれ保持しており、入力部63からの指示に基づいて選択された検査モードに対応する演算則を設定する。
【0031】
演算則設定部602が保持する演算則は、被検査物100の内周面100aの性状変化、換言すれば反射光の性状変化に対する各PD12A、12Bの出力信号の特性(感度特性)を考慮して設定されている。まず、表面欠陥検査モードで設定される演算則について説明する。表面欠陥検査モードでは、被検査物100の内周面100aに現れる鋳巣等の欠陥と、欠陥とすべきでない切削加工により形成される内周面100aの窪みとを区別できる感度特性が得られるように演算則が設定される。なお、この窪みは切削加工した場合に不可避なものであり、バイト等の工具を新品に取り替えた場合に表面に現れるいわゆるビビリに近い浅い窪みのことである。被検査物100の内周面100aに形成される窪みは反射光の方向を変化させる。つまり窪みは検査光の照射方向(光軸)に対してある程度の角度を持った表面と考えられる。
【0032】
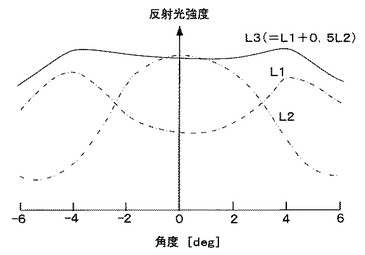
図4は、反射光の角度変化に関する検出ユニット5の感度特性を示している。図4の一点鎖線L1は反射光の角度が変化した場合のPD12Aの出力信号、つまり第1受光ファイバ群14Aの感度特性を示し、二点鎖線L2は、反射光の角度が変化した場合のPD12Bの出力信号、つまり第2受光ファイバ群14Bの感度特性を示し、実線L3はPD12Aの出力信号とPD12Bの出力信号とを合成した場合の感度特性を示している。図4の横軸は角度[deg]を、縦軸は反射光強度をそれぞれ示している。表面欠陥検査モードでは、上述のように第2受光ファイバ群14Bに反射光の焦点を結ぶように検出ユニット5が調整される。このため、二点鎖線L2のように、第2受光ファイバ群14Bの感度特性は反射光の方向にずれがない原点において最大値をとり、反射光のずれが大きくなるに従い強度が低下する感度特性となる。一方、第1受光ファイバ群14Aの感度特性は第2受光ファイバ群14Bに焦点を合わせた関係で、±4deg付近で最大値をとり、原点において最小値となる中央が凹んだ形状の感度特性を示す。これらの感度特性は、光ファイバ群14A、14Bの間隔、各ファイバ群14A、14Bと投光ファイバ13との距離、これらのファイバ群を構成する受光ファイバ14の径の大きさ等の物理的構成に依存するので、検出ユニット5の形態に固有のものである。
【0033】
内周面100aに形成される上記の窪みは、−6〜6deg程度の範囲で反射光を変化させる。従って、検出ユニット5がこの範囲内の角度変化に対して略平坦な感度特性を持つようにすれば、窪みに検査光が照射された場合でも検出ユニット5が受光する反射光の強度は低下せず、窪みと鋳巣とを明確に区別することができる。そこで、この形態の表面欠陥検査モードでは、図4の実線L3で示す如く−6〜6deg程度の範囲内の角度変化に対して略平坦な感度特性となるように、PD12Aの出力信号に所定値としての0.5を乗じたものをPD12Bの出力信号に加算する演算則を設定している。
【0034】
次に、表面異物検査モードで設定される演算則について説明する。表面異物検査モードでは、被検査物100の内周面100aに付着した切粉等の異物に照射された検査光が異物のない正常な表面と同様に反射する場合であっても異物を検知できる感度特性が得られるように演算則が設定される。切粉等の異物が内周面100aに付着している場合と、そうでない場合とを比べると、異物が付着している場合はその異物が存在する分だけ検査光の反射位置が近くなる。言い換えれば、異物が付着している場合はそれがない場合に比べて、レンズ17からミラー18を経て内周面100aに至る光路の長さが短くなる。
【0035】
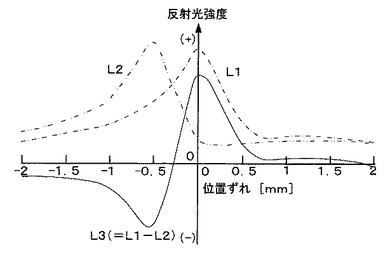
図5は被検査物100の反射位置までの距離変化に関する検出ユニット5の感度特性を示している。図5の一点鎖線L1は反射位置までの距離が変化した場合のPD12Aの出力信号、つまり第1受光ファイバ群14Aの感度特性を示し、二点鎖線L2は、反射位置までの距離が変化した場合のPD12Bの出力信号、つまり第2受光ファイバ群14Bの感度特性を示し、実線L3はPD12Aの出力信号とPD12Bの出力信号とを合成した場合の感度特性を示している。図5の横軸は基準位置を原点とし、その基準位置と反射位置との位置ずれ[mm]を示している。負号は検出ユニット5側に近いことを意味する。図5の縦軸は反射光強度を示している。表面異物検査モードでは、上述のように第1受光ファイバ群14Aに反射光の焦点を結ぶように検出ユニット5が調整される。このため、一点鎖線L1のように、第1受光ファイバ群14Aの感度特性は位置ずれのない原点において最大値をとり、位置ずれが大きくなるに従い強度が低下する感度特性となる。一方、第2受光ファイバ群14Bの感度特性は第1受光ファイバ群14Aに焦点を合わせた関係で、第1受光ファイバ群14Aの感度特性を−0.5mm付近までシフトしたものと同等な感度特性となる。これらの感度特性は、上述の通り検出ユニット5の物理的構成に依存するので、検出ユニット5の形態に固有のものである。
【0036】
内周面100aに付着する切粉の平均的な寸法(例えば厚さ)は、0.5mm程度であるので、内周面100aに付着した切粉に検査光を照射した場合、切粉のない基準位置に比べて反射位置が0.5mm程度近づくことになる。従って、検出ユニット5がその程度の反射位置の近づきを検知できる負のピークを持つ感度特性を持つようにすれば、仮に切粉等の異物に照射された検査光が異物のない正常な表面と同様に反射する場合であっても異物を検知できるようになる。そこで、この形態の表面異物検査モードでは、図5の実線L3で示す如く−0.5mm程度で負のピークを持つ感度特性となるように、PD12Aの出力信号からPD12Bの出力信号を減算する演算則を設定している。
【0037】
以上説明した各演算則は、検出ユニット5の物理的構成、具体的には光ファイバ群14A、14Bの間隔、各ファイバ群14A、14Bと投光ファイバ13との距離、これらのファイバ群を構成する受光ファイバ14の径の大きさ等に適した一例であり、所定の感度特性を得るために他の演算則を使用することもできる。
【0038】
図3に示すように、画像生成部603は、各検査モードに対応した演算則に従って合成された合成信号Ps3を合成処理部601から受けとると、その合成信号Ps3を利用して被検査物100の内周面100aを平面的に展開した2次元画像を生成し、その2次元画像を出力部64及び判定部604にそれぞれ出力する。画像生成部603が生成する2次元画像は、例えば被検査物の周方向をx軸方向、検査ヘッド16の軸線方向をy軸方向とする直交2軸座標系で定義される平面上に内周面100aを展開した画像に相当する。判定部604は、画像生成部603から得た2次元画像を、検査モード毎に用意された所定のアルゴリズムで処理することにより、許容限度を超える欠陥の有無を判定し、その判定結果を出力部64に出力する。
【0039】
以上説明したように、本形態の表面検査装置1によれば、PD12Aの出力信号を基礎とした反射光信号Ps1と、PD12Bの出力信号を基礎とした反射光信号Ps2とが各検査モードに対応した演算則に従って組合わされることにより、各検査モードに適した検出ユニット5の感度特性を作り出すことができる。これにより、一つの検出ユニット5で互いに異なる複数の検査を実行することができ、なおかつ各検査モードでの検査精度が向上する。
【0040】
以上の形態において、LD11が本発明に係る光源に、PD12Aが本発明に係る第1の光電変換手段に、PD12Bが本発明に係る第2の光電変換手段に、第1受光ファイバ群14Aが本発明の第1の受光ファイバ群に、第2受光ファイバ群14Bが本発明の第2の受光ファイバ群に、それぞれ相当する。
【0041】
但し、本発明は以上の形態に限定されず、種々の形態にて実施してよい。上記の形態では、各PD12A、12Bからの出力信号をA/D変換してから、これらのデジタル信号が所定の演算則に従って合成されるように演算処理部60を機能させているが、各PDからの出力信号をアナログ信号の状態で所定の演算則に従って合成されるように、図63に示した合成処理部601及び演算則設定部602のそれぞれをハードウエア回路で実現してもよい。
【0042】
上述の形態では、図2に示すように投光ファイバ13に対する位置関係が互いに相違する二つの受光ファイバ群14A、14Bが設けられているが、第2受光ファイバ群14Bの外周に複数の受光ファイバを配置して、3つの受光ファイバ群を設けてもよい。3つの受光ファイバ群を設けた場合、最も外側の第3の受光ファイバ群から導かれた反射光を受光する第3の光電変換手段を設けてもよい。これにより、各光電変換手段の信号をそれぞれ組合わせるバリエーションが増えるので、より多様な感度特性を検出手段に与えることができるようになる。
【0043】
演算則設定部602が設定する演算則は、種々のものが想定される。例えば、上述した表面異物検査モードでは、PD12Aの信号からPD12Bの信号を減算することとしたが、第2受光ファイバ群12Bに反射光の焦点を合わせた上で、PD12Bの信号からPD12Aの信号を減算してもよい。こうすることにより、図5に示した実線L3を縦軸に関して反転させた感度特性を得ることができる。この場合には、基準位置よりも反射位置が所定距離だけ離れた状態を検知できる。これにより、被検査物の表面に形成された所定距離に相当する寸法の凹部を検出することができるようになる。
【0044】
また、PD12Aの信号とPD12Bとの信号を単純に加算する演算則を設定することにより、それぞれのファイバ群の受光面積を合計した受光面積を持つ受光ファイバ群を設けた場合、つまり受光ファイバの径を拡大した場合と略同等な感度特性を得ることができる。なお、これらの信号を両方とも使用することは必須ではなく、必要に応じてこれらの信号を単独で使用することもできる。
【0045】
上述した検査装置1は、円筒状の内周面の検査に適用したが、検査ヘッド16の回転させずに軸線方向へ移動させつつ、軸線方向と直交する方向へのさせることにより平面状の表面を持つ被検査物の検査装置として用いることもできる。上述した表面異物検査モードでは、反射位置の変化に対して図5に示した感度特性を有しているので、表面検査装置1を所定の分解能で被検査物の真円率を求めることができる回転式距離計測装置として機能させることができる。
【図面の簡単な説明】
【0046】
【図1】本発明の一形態に係る表面検査装置の概略構成を示した図。
【図2】保持筒にて保持された投光ファイバ及び受光ファイバ群の先端部を示した平面模式図。
【図3】演算処理部の機能を説明するブロック図。
【図4】反射光の角度変化に関する検出ユニットの感度特性を示した図。
【図5】被検査物の反射位置までの距離変化に関する検出ユニットの感度特性を示した図。
【符号の説明】
【0047】
1 表面検査装置
5 検出ユニット(検出手段)
11 LD(光源)
12A PD(第1の光電変換手段)
12B PD(第2の光電変換手段)
13 投光ファイバ
14 受光ファイバ
14A 第1受光ファイバ群(第1の受光ファイバ群)
14B 第2受光ファイバ群(第2の受光ファイバ群)
16 検査ヘッド
30 直線駆動機構(直線駆動手段)
40 回転駆動機構(回転駆動手段)
100 被検査物
100a 内周面(表面)
601 合成処理部(合成処理手段)
602 演算則設定部(演算則設定手段)
AX 軸線
Ps1 第1の信号
Ps2 第2の信号
【技術分野】
【0001】
本発明は、被検査物の表面に照射した検査光の反射光の強度を検出し、検出された反射光の強度に基づいて被検査物の表面を検査する表面検査装置装置に関する。
【背景技術】
【0002】
円筒状の被検査物の内周面を検査する装置として、軸状の検査ヘッドをその軸線の回りに回転させつつ軸線方向に送り出して被検査物の内部に検査ヘッドを挿入し、その検査ヘッドの外周から検査光を被検査物に照射してその被検査物の内周面をその軸線方向の一旦から他端まで逐次走査し、その走査に対応した被検査物からの反射光を検査ヘッドを介して受光し、その受光した反射光の強度に基づいて被検査物の状態、例えば欠陥等の有無を判別する表面検査装置が知られている(例えば、特許文献1参照)。
【0003】
【特許文献1】特開平11−281582号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
特許文献1の表面検査装置は、検査光を投光する投光ファイバの回りに反射光を受光する複数の受光ファイバを隣接させてこれらの光ファイバをファイバ保持筒で保持するようにした検出手段を有している。この検出手段は投光ファイバと受光ファイバとの距離等の位置関係が固定されているので、反射光の方向や強さ等の反射光の性状変化に対する検出手段の感度特性も固定される。反射光の性状は被検査物に存在する欠陥の種類に応じて特徴付けられるので、従来の表面検査装置では、被検査物から発見すべき欠陥を検知できる感度特性を検出手段が持つように受光ファイバの位置等が設定される。
【0005】
このように、従来の表面検査装置では検出手段の感度特性が発見すべき欠陥を検知できる感度特性に固定されているので、例えば、発見すべき欠陥の種類が変わった場合にその欠陥を十分に検知できないことや、欠陥と区別すべき箇所が新たに設定された場合にその箇所を欠陥として誤検出する等の問題がある。
【0006】
そこで、本発明は、欠陥の種類等に応じて様々な感度特性を作り出すことができる表面検査装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の表面検査装置(1)は、光源(11)から投光ファイバ(13)を介して被検査物(100)の表面(100a)に検査光を照射し、その検査光の反射光の強度を検出する検出手段(5)を有し、前記検出手段の検出結果に基づいて前記被検査物の表面を検査する表面検査装置において、前記検出手段は、前記投光ファイバの周囲に配置されて前記反射光を導くことができる複数の受光ファイバ(14)からなる第1の受光ファイバ群(14A)と、前記投光ファイバから見て前記第1の受光ファイバ群よりも外側に配置されて前記反射光を導くことができる複数の受光ファイバ(14)からなる第2の受光ファイバ群(14B)と、前記第1の受光ファイバ群にて導かれた反射光の強度に対応した信号を出力する第1の光電変換手段(12A)と、前記第2の受光ファイバ群にて導かれた反射光の強度に対応した信号を出力する第2の光電変換手段(12B)と、を備えることにより上述した課題を解決する。
【0008】
この検査装置によれば、第1の受光ファイバ群の外側に第2の受光ファイバ群が配置されており、これらのファイバ群は投光ファイバとの位置関係が互いに相違する。そのため、一つの検出手段が互いに相違する複数の感度特性を有することになる。従って、検知すべき欠陥の種類に応じて第1の光電変換手段の信号と第2の光電変換手段の信号とを使い分けたり、あるいはこれらの信号を組合わせることにより、様々な感度特性を作り出すことが可能となる。
【0009】
本発明の検査装置の一態様においては、前記第1の光電変換手段から出力された第1の信号(Ps1)と前記第2の光電変換手段から出力された第2の信号(Ps2)とを所定の演算則に基づいて組み合わせる合成処理手段(601)と、前記検出手段の感度が所定の感度特性となるように前記所定の演算則を設定する演算則設定手段(602)と、を更に備えてもよい。演算則設定手段が設定する演算則に制限はない。また演算則設定手段が複数種類の演算則を予め保持しておきそれらの中から適当な演算則を選択して設定してもよい。例えば、第1の信号と第2の信号とを単純に加算する演算則を設定することにより、それぞれのファイバ群の受光面積を合計した受光面積を持つ受光ファイバ群を設けた場合、つまり受光ファイバの径を拡大した場合と略同等な感度特性を得ることができる。
【0010】
ところで、被検査物が鋳造品でかつ検査する表面が切削加工されている場合には、鋳造品の表面に現れる鋳巣を欠陥として検知すると同時に、切削加工によって表面に形成されるわずかな窪みを欠陥たる鋳巣と区別することが要請される。表面に鋳巣が存在する場合には、鋳巣に検査光を照射しても殆ど反射しないため反射光の強度は下がる。一方、表面に形成される窪みは反射光の方向を変化させる。そのため反射光の角度変化に関する検出手段の感度が敏感であると、つまり反射光の角度範囲に対して許容範囲が狭い感度特性であると、検出手段は表面の窪みで反射した反射光を受光できない場合がある。これにより、受光する反射光の強度が下がり鋳巣と窪みとの区別が付きにくくなる。
【0011】
そこで、本発明の検査装置の一態様においては、前記演算則設定手段は、前記被検査物の表面からの反射光の角度変化に関する前記検出手段の感度が所定範囲内の角度変化に対して略平坦な感度特性となるように前記所定の演算則を設定してもよい。この場合、窪みからの反射光の角度変化幅に対応して所定範囲を設定すれば、その範囲内の感度特性が略平坦であるので、窪みからの反射光を窪みのない表面からの反射光と同等の強度で受光できるようになる。従って、鋳巣と窪みとの区別が明確になり検査精度が向上する。
【0012】
第1及び第2の受光ファイバ群のそれぞれの反射光の角度変化に関する感度特性は、これらの光ファイバ群の間隔、各ファイバ群と投光ファイバとの距離、これらのファイバ群を構成する受光ファイバの径の大きさ等の物理的構成に依存する。従って、このような平坦な感度特性を得るための演算則は、反射光の角度変化に関する第1の受光ファイバ群の感度特性と第2の受光ファイバ群の感度特性とを考慮して適宜に設定される。例えば、前記演算則設定手段は、前記所定の演算則として、前記第2の信号に所定値を乗じたものを前記第1の信号に加算する演算則を設定してもよい。このような演算則によっても略平坦な感度特性を得ることができる。
【0013】
ところで、被検査物の表面が切削加工されたものである場合、その切削加工による切粉が表面に付着することがあり、その切粉の存在を欠陥として検知する要請がある。切粉に照射された検査光が殆ど反射しない場合や反射光の方向が大きく外れる場合などには、受光される反射光の強度が低下するので切粉の検出が可能である。しかし、切粉は一様な形状でないので、切粉に照射された検査光が正常な表面と同様に反射する場合には、切粉の存在を見過ごすおそれがある。
【0014】
そこで、本発明の検査装置の一態様においては、前記演算則設定手段は、前記被検査物の反射位置までの距離変化に関する前記検出手段の感度が所定の距離だけ反射位置が近くなった場合に負のピークを持つ感度特性となるように前記所定の演算則を設定してもよい。これによれば、例えば所定の距離を切粉の平均的寸法に設定することにより、切粉の存在により受光される反射光の強度が負の値となって切粉の検知が可能となるので、切粉の存在を見過ごす危険性が減じられる。このような感度特性を得るための演算則は、上述のように検出手段の物理的構成に依存するので、被検査物の反射位置までの距離変化に関する第1の受光ファイバ群による感度特性と第2の受光ファイバ群の感度特性とを考慮して適宜に設定される。例えば、前記演算則設定手段は、前記所定の演算則として、前記第1の信号から前記第2の信号を減算する演算則を設定してもよい。このような演算則によっても所定の距離だけ反射位置が近くなった場合に負のピークを持つ感度特性を得ることができる。
【0015】
本発明の検査装置は、被検査物の平面状の表面を検査する装置として構成してもよいし、非平面状の表面を検査する装置として構成してもよい。例えば、前記被検査物の前記表面として円筒状の内周面(100a)が設けられ、前記検出手段は、軸状に延びる検査ヘッド(16)の外周から前記円筒体の内周面に向かって検査光を照射するとともに、前記検査ヘッドを軸線方向に移動させる直線駆動手段(30)と、前記検査ヘッドをその軸線の回りに回転させる回転駆動手段(40)とを更に備えてもよい。
【0016】
なお、以上の説明では本発明の理解を容易にするために添付図面の参照符号を括弧書きにて付記したが、それにより本発明が図示の形態に限定されるものではない。
【発明の効果】
【0017】
以上に説明したように、本発明によれば、第1の受光ファイバ群の外側に第2の受光ファイバ群が配置されており、これらのファイバ群は投光ファイバとの位置関係が互いに相違するため、一つの検出手段が互いに相違する複数の感度特性を有することになる。従って、検知すべき欠陥の種類に応じて第1の光電変換手段の信号と第2の光電変換手段の信号とを使い分けたり、あるいはこれらの信号を組合わせることにより、様々な感度特性を作り出すことが可能となる。
【発明を実施するための最良の形態】
【0018】
図1は、本発明の一形態に係る表面検査装置の概略構成を示している。表面検査装置1は、被検査物100の円筒体の内周面100aの検査に適した装置である。表面検査装置1は、そのような検査を実行して被検査物100の内周面100aに関する情報を出力する検査機構2と、検査機構2の各部の動作を制御するとともに、検査機構2が出力した情報を処理する制御部3とを備えている。更に、検査機構2は被検査物100に対して検査光を投光し、かつ被検査物100からの反射光を受光するための検出ユニット5と、その検出ユニット5に所定の動作を与えるための駆動ユニット6とを備えている。
【0019】
検出ユニット5は、検査光の光源としてのレーザダイオード(以下、LDと呼ぶ。)11と、被検査物100からの反射光を受光し、その反射光の単位時間当たりの光量(反射光強度)に応じた電流又は電圧の電気信号を出力する二つのフォトディテクタ(以下、PDと呼ぶ。)12A、12Bと、LD11から射出される検査光を被検査物100に向かって導く投光ファイバ13と、被検査物100からの反射光をPD12Aに導くための第1受光ファイバ群14Aと、被検査物100からの反射光をPD12Bに導くための第2受光ファイバ群14Bと、そららの投光ファイバ13及び受光ファイバ群14A、14Bを束ねた状態で保持する保持筒15と、その保持筒15の外側に同軸的に設けられる中空軸状の検査ヘッド16とを備えている。
【0020】
図2は、保持筒15にて保持された投光ファイバ13及び受光ファイバ群14A、14Bの先端部(図1において右端部)を示している。投光ファイバ13は保持筒15の中心線上に配置されており、第1受光ファイバ群14Aはその投光ファイバ13の周囲に配置された6本の受光ファイバ14からなる。また第2受光ファイバ群14Bは投光ファイバ13から見て第1受光ファイバ群14Aの外側に配置された12本の受光ファイバ14からなる。投光ファイバ13と各受光ファイバ群14A、14Bを構成する受光ファイバ14とは、図示しない樹脂系接着剤等の接合手段で互いに固定されており、位置ずれが防止されている。なお、第1受光ファイバ群14A及び第2受光ファイバ群14Bをそれぞれ構成する受光ファイバ14の本数に制限はなく、適宜の本数を採用してよい。
【0021】
図1に示すように、保持筒15の先端には、投光ファイバ13を介して導かれた検査光を検査ヘッド16の軸線AXの方向(以下、軸線方向と呼ぶ。)に沿ってビーム状に射出させ、かつ検査ヘッド16の軸線方向に沿って検査光とは逆向きに進む反射光を受光ファイバ14に集光するレンズ17が設けられている。検査ヘッド16の先端部(図1において右端部)には、光路変更手段としてのミラー18が固定され、検査ヘッド16の外周にはそのミラー18と対向するようにして透光窓16aが設けられている。ミラー18は、レンズ17から射出された検査光の光路を透光窓16aに向けて変更し、かつ透光窓16aから検査ヘッド16内に入射した反射光の光路をレンズ17に向かって進む方向に変更する。
【0022】
駆動ユニット6は、直線駆動機構30と、回転駆動機構40と、焦点調整機構50とを備えている。直線駆動機構30は検査ヘッド16をその軸線方向に移動させる移動手段として設けられている。このような機能を実現するため、直線駆動機構30は、ベース31と、そのベース31に固定された一対のレール32と、レール32に沿って検査ヘッド16の軸線方向に移動可能なスライダ33と、そのスライダ33の側方に検査ヘッド16の軸線AXと平行に配置された送りねじ34と、その送りねじ34を回転駆動する電動モータ35とを備えている。スライダ33は検出ユニット5の全体を支持する手段として機能する。即ち、LD11及びPD12A、12Bはスライダ33に固定され、検査ヘッド16は回転駆動機構40を介してスライダ33に取り付けられ、保持筒15は焦点調節機構50を介してスライダ33に取り付けられている。更に、送りねじ34は、スライダ33に固定されたナット36にねじ込まれている。従って、電動モータ35にて送りねじ34を回転駆動することにより、スライダ33がレール32に沿って検査ヘッド16の軸線方向に移動し、それに伴ってスライダ33に支持された検出ユニット5の全体が検査ヘッド16の軸線方向に移動する。直線駆動機構30を用いた検出ユニット5の駆動により、被検査物100の内周面100aに対する検査光の照射位置を検査ヘッド16の軸線方向に関して変化させることができる。
【0023】
回転駆動機構40は検査ヘッド16を軸線AXの回りに回転させる回転駆動手段として設けられている。そのような機能を実現するため、回転駆動機構40は、検査ヘッド16を軸線AXの回りに回転自在に支持する軸受(不図示)と、回転駆動源としての電動モータ41と、その電動モータ41の回転を検査ヘッド16に伝達する伝達機構42とを備えている。伝達機構42には、ベルト伝達装置、歯車列との公知の回転伝達機構を利用してよい。電動モータ41の回転を伝達機構42を介して検査ヘッド16に伝達することにより、検査ヘッド16がその内部に固定されたミラー18を伴って軸線AXの回りに回転する。回転駆動機構40を用いた検査ヘッド16の回転により、被検査物100の内周面100aに対する検査光の照射位置を周方向に関して変化させることができる。そして、検査ヘッド16の軸線方向への移動と軸線AXの回りの回転とを組合わせることにより、被検査物100の内周面100aをその全面に亘って検査光で走査することが可能となる。なお、検査ヘッド16の回転時において、保持筒15は回転しない。更に、回転駆動機構40には、検査ヘッド16の回転位置に応じたパルス信号を出力するロータリーエンコーダ43が設けられている。ロータリーエンコーダ43は、検査ヘッド16に取り付けられて一体に回転し、かつ周方向に沿って所定間隔で並ぶ複数の検知孔(不図示)が形成された円板43aと、その円板43aの検知孔の位置に応じたパルスを生成するパルス生成部43bとを備える。ロータリーエンコーダ43からのパルス信号は制御部3にて利用される。
【0024】
焦点調節機構50は、検査光が被検査物100の内周面100aにて焦点を結び、かつ内周面100aからの反射光が第1受光ファイバ群14A又は第2受光ファイバ群14のいずれか一方で焦点を結ぶように保持筒15を軸線AXの方向に駆動する焦点調節手段として設けられている。その機能を実現するため、焦点調節機構50は保持筒50の基端部に固定された支持板51と、直線駆動機構30のスライダ33と支持板51との間に配置されて支持板51を検査ヘッド16の軸線方向に案内するレール52と、検査ヘッド16の軸線AXと平行に配置されて支持板51にねじ込まれた送りねじ53と、その送りねじ53を回転駆動する電動モータ54とを備えている。電動モータ54にて送りねじ53を回転駆動することにより、支持板51がレール52に沿って移動して保持筒15が検査ヘッド16の軸線方向に移動する。これにより、検査光が被検査物100の内周面100a上で焦点を結び、かつ内周面100aからの反射光が第1受光ファイバ群14A又は第2受光ファイバ群14Bのいずれか一方で焦点を結ぶようにレンズ17からミラー18を経て内周面100aに至る光路の長さを調節することができる。
【0025】
次に制御部3について説明する。制御部3は、表面検査装置1による検査工程の管理、測定結果の処理等を実行するコンピュータユニットとしての演算処理部60と、その演算処理部60の指示に従って検査機構2の各部の動作を制御する動作制御部61と、PD12Aの出力信号に対して所定の処理を実行する信号処理部62Aと、PD12Aの出力信号に対して所定の処理を実行する信号処理部62Bと、演算処理部60に対してユーザが指示を入力するための入力部63と、演算処理部60における測定結果等をユーザに提示するための出力部64と、演算処理部60にて実行すべきコンピュータプログラム、及び測定されたデータ等を記憶する記憶部65とを備えている。演算処理部60、入力部63、出力部64及び記憶部65はパーソナルコンピュータ等の汎用のコンピュータ機器を利用してこれらを構成することができる。この場合、入力部63にはキーボード、マウス等の入力機器が設けられ、出力部64にはモニタ装置が設けられる。プリンタ等の出力機器が出力部64に追加されてもよい。記憶部65には、ハードディスク記憶装置、あるいは記憶保持が可能な半導体記憶素子等の記憶装置が用いられる。動作制御部61及び信号処理部62A、62Bはハードウエア制御回路によって実現されてもよいし、コンピュータユニットによって実現されてもよい。
【0026】
以下では、内周面100aが切削加工された鋳造品を被検査物100とした場合に好適な形態を例示する。表面検査装置1が実行できる検査モードには、被検査物100の表面としての内周面100aに現れた鋳巣等の表面自体の欠陥を検出する表面欠陥検査モードと、被検査物100の表面に付着した切粉等の異物を欠陥として検出する付着異物検査モードとがそれぞれ設定されており、ユーザによる入力部63からの指示に応じて各検査モードを選択できるように構成されている。なお、これらの検査モードに応じて演算処理部60及び動作制御部61の動作がそれぞれ異なるが、まずは各モードに共通する動作を説明する。
【0027】
被検査物100の内周面100aの表面を検査する場合、被検査物100は検査ヘッド16と同軸上に配置される。検査の開始にあたって、演算処理部60は入力部63からの指示に従って動作制御部61に被検査物100の内周面100aを検査するために必要な動作の開始を指示する。その指示を受けた動作制御部61は、LD11を所定の強度で発光させるとともに、検査ヘッド16が軸線方向に移動し、かつ軸線AXの回りに一定速度で回転するようにモータ35及びモータ41の動作を制御する。そして、ユーザの指示により表面欠陥検査モードが選択された場合には、動作制御部61は検査光が内周面100a上で焦点を結び、かつ内周面100aからの反射光が第2受光ファイバ群14Bに焦点を結ぶようにモータ54の動作を制御する。一方、表面欠陥検査モードが選択された場合には、動作制御部61は検査光が内周面100a上で焦点を結び、かつ内周面100aからの反射光が第1受光ファイバ群14Aに焦点を結ぶようにモータ54の動作を制御する。このような動作制御により、内周面100aがその一端から他端まで検査光によって走査される。
【0028】
その走査に連係して信号処理部62AにはPD12Aの出力信号が、信号処理部62BにはPD12Bの出力信号がそれぞれ順次導かれる。信号処理部62Aは、PD12Aの出力信号を演算処理部60にて処理するために必要なアナログ信号処理を実施し、更にその処理後のアナログ信号を所定のビット数でA/D変換し、得られたデジタル信号を反射光信号として演算処理部60に出力する。信号処理部62Aが行うA/D変換は、ロータリーエンコーダ43から出力されるパルス列をサンプリングクロック信号として利用して行われる。これにより、検査ヘッド16が所定角度回転する間のPD12の受光量(強度)に相関した階調のデジタル信号が生成されて信号処理部62Aから出力される。PD12Bの出力信号が入力される信号処理部62Bも上記と同様に機能する。
【0029】
各信号処理部62A、62Bから反射光信号を受け取った演算処理部60は、信号処理部62Aからの信号と、信号処理部62Bからの信号とを互いに区別できる状態で記憶部65に記憶する。更に、演算処理部60は記憶部65が記憶する反射光信号を利用して被検査物100の内周面100aを平面的に展開した2次元画像を生成し、その2次元画像に基づいて欠陥の有無を判定し、その判定結果としての検査結果を出力部64に出力する。
【0030】
次に、演算処理部60がこのような2次元画像を生成し、その2次元画像に基づいて検査結果を出力するプロセスについて図3を参照して説明する。図3は演算処理部60の機能を説明するブロック図である。演算処理部60は記憶部65が記憶する所定のプログラムを実行することにより、図3に示した合成処理部601、演算則設定部602、画像生成部603及び判定部604としてそれぞれ機能する。まず、演算処理部60は、記憶部65が記憶するPD12Aの出力信号を基礎とした反射光信号Ps1と、PD12Aの出力信号を基礎とした反射光信号Ps2とを合成処理部601にそれぞれ読み込む。次に、その合成処理部601は、これらの信号Ps1、Ps2を演算則設定部602が設定する演算則に従って組合わせ、その合成信号を画像生成部603に出力する。演算則設定部602は、上述した表面欠陥検査モードに対応する演算則と、表面異物検査モードに対応する演算則とをそれぞれ保持しており、入力部63からの指示に基づいて選択された検査モードに対応する演算則を設定する。
【0031】
演算則設定部602が保持する演算則は、被検査物100の内周面100aの性状変化、換言すれば反射光の性状変化に対する各PD12A、12Bの出力信号の特性(感度特性)を考慮して設定されている。まず、表面欠陥検査モードで設定される演算則について説明する。表面欠陥検査モードでは、被検査物100の内周面100aに現れる鋳巣等の欠陥と、欠陥とすべきでない切削加工により形成される内周面100aの窪みとを区別できる感度特性が得られるように演算則が設定される。なお、この窪みは切削加工した場合に不可避なものであり、バイト等の工具を新品に取り替えた場合に表面に現れるいわゆるビビリに近い浅い窪みのことである。被検査物100の内周面100aに形成される窪みは反射光の方向を変化させる。つまり窪みは検査光の照射方向(光軸)に対してある程度の角度を持った表面と考えられる。
【0032】
図4は、反射光の角度変化に関する検出ユニット5の感度特性を示している。図4の一点鎖線L1は反射光の角度が変化した場合のPD12Aの出力信号、つまり第1受光ファイバ群14Aの感度特性を示し、二点鎖線L2は、反射光の角度が変化した場合のPD12Bの出力信号、つまり第2受光ファイバ群14Bの感度特性を示し、実線L3はPD12Aの出力信号とPD12Bの出力信号とを合成した場合の感度特性を示している。図4の横軸は角度[deg]を、縦軸は反射光強度をそれぞれ示している。表面欠陥検査モードでは、上述のように第2受光ファイバ群14Bに反射光の焦点を結ぶように検出ユニット5が調整される。このため、二点鎖線L2のように、第2受光ファイバ群14Bの感度特性は反射光の方向にずれがない原点において最大値をとり、反射光のずれが大きくなるに従い強度が低下する感度特性となる。一方、第1受光ファイバ群14Aの感度特性は第2受光ファイバ群14Bに焦点を合わせた関係で、±4deg付近で最大値をとり、原点において最小値となる中央が凹んだ形状の感度特性を示す。これらの感度特性は、光ファイバ群14A、14Bの間隔、各ファイバ群14A、14Bと投光ファイバ13との距離、これらのファイバ群を構成する受光ファイバ14の径の大きさ等の物理的構成に依存するので、検出ユニット5の形態に固有のものである。
【0033】
内周面100aに形成される上記の窪みは、−6〜6deg程度の範囲で反射光を変化させる。従って、検出ユニット5がこの範囲内の角度変化に対して略平坦な感度特性を持つようにすれば、窪みに検査光が照射された場合でも検出ユニット5が受光する反射光の強度は低下せず、窪みと鋳巣とを明確に区別することができる。そこで、この形態の表面欠陥検査モードでは、図4の実線L3で示す如く−6〜6deg程度の範囲内の角度変化に対して略平坦な感度特性となるように、PD12Aの出力信号に所定値としての0.5を乗じたものをPD12Bの出力信号に加算する演算則を設定している。
【0034】
次に、表面異物検査モードで設定される演算則について説明する。表面異物検査モードでは、被検査物100の内周面100aに付着した切粉等の異物に照射された検査光が異物のない正常な表面と同様に反射する場合であっても異物を検知できる感度特性が得られるように演算則が設定される。切粉等の異物が内周面100aに付着している場合と、そうでない場合とを比べると、異物が付着している場合はその異物が存在する分だけ検査光の反射位置が近くなる。言い換えれば、異物が付着している場合はそれがない場合に比べて、レンズ17からミラー18を経て内周面100aに至る光路の長さが短くなる。
【0035】
図5は被検査物100の反射位置までの距離変化に関する検出ユニット5の感度特性を示している。図5の一点鎖線L1は反射位置までの距離が変化した場合のPD12Aの出力信号、つまり第1受光ファイバ群14Aの感度特性を示し、二点鎖線L2は、反射位置までの距離が変化した場合のPD12Bの出力信号、つまり第2受光ファイバ群14Bの感度特性を示し、実線L3はPD12Aの出力信号とPD12Bの出力信号とを合成した場合の感度特性を示している。図5の横軸は基準位置を原点とし、その基準位置と反射位置との位置ずれ[mm]を示している。負号は検出ユニット5側に近いことを意味する。図5の縦軸は反射光強度を示している。表面異物検査モードでは、上述のように第1受光ファイバ群14Aに反射光の焦点を結ぶように検出ユニット5が調整される。このため、一点鎖線L1のように、第1受光ファイバ群14Aの感度特性は位置ずれのない原点において最大値をとり、位置ずれが大きくなるに従い強度が低下する感度特性となる。一方、第2受光ファイバ群14Bの感度特性は第1受光ファイバ群14Aに焦点を合わせた関係で、第1受光ファイバ群14Aの感度特性を−0.5mm付近までシフトしたものと同等な感度特性となる。これらの感度特性は、上述の通り検出ユニット5の物理的構成に依存するので、検出ユニット5の形態に固有のものである。
【0036】
内周面100aに付着する切粉の平均的な寸法(例えば厚さ)は、0.5mm程度であるので、内周面100aに付着した切粉に検査光を照射した場合、切粉のない基準位置に比べて反射位置が0.5mm程度近づくことになる。従って、検出ユニット5がその程度の反射位置の近づきを検知できる負のピークを持つ感度特性を持つようにすれば、仮に切粉等の異物に照射された検査光が異物のない正常な表面と同様に反射する場合であっても異物を検知できるようになる。そこで、この形態の表面異物検査モードでは、図5の実線L3で示す如く−0.5mm程度で負のピークを持つ感度特性となるように、PD12Aの出力信号からPD12Bの出力信号を減算する演算則を設定している。
【0037】
以上説明した各演算則は、検出ユニット5の物理的構成、具体的には光ファイバ群14A、14Bの間隔、各ファイバ群14A、14Bと投光ファイバ13との距離、これらのファイバ群を構成する受光ファイバ14の径の大きさ等に適した一例であり、所定の感度特性を得るために他の演算則を使用することもできる。
【0038】
図3に示すように、画像生成部603は、各検査モードに対応した演算則に従って合成された合成信号Ps3を合成処理部601から受けとると、その合成信号Ps3を利用して被検査物100の内周面100aを平面的に展開した2次元画像を生成し、その2次元画像を出力部64及び判定部604にそれぞれ出力する。画像生成部603が生成する2次元画像は、例えば被検査物の周方向をx軸方向、検査ヘッド16の軸線方向をy軸方向とする直交2軸座標系で定義される平面上に内周面100aを展開した画像に相当する。判定部604は、画像生成部603から得た2次元画像を、検査モード毎に用意された所定のアルゴリズムで処理することにより、許容限度を超える欠陥の有無を判定し、その判定結果を出力部64に出力する。
【0039】
以上説明したように、本形態の表面検査装置1によれば、PD12Aの出力信号を基礎とした反射光信号Ps1と、PD12Bの出力信号を基礎とした反射光信号Ps2とが各検査モードに対応した演算則に従って組合わされることにより、各検査モードに適した検出ユニット5の感度特性を作り出すことができる。これにより、一つの検出ユニット5で互いに異なる複数の検査を実行することができ、なおかつ各検査モードでの検査精度が向上する。
【0040】
以上の形態において、LD11が本発明に係る光源に、PD12Aが本発明に係る第1の光電変換手段に、PD12Bが本発明に係る第2の光電変換手段に、第1受光ファイバ群14Aが本発明の第1の受光ファイバ群に、第2受光ファイバ群14Bが本発明の第2の受光ファイバ群に、それぞれ相当する。
【0041】
但し、本発明は以上の形態に限定されず、種々の形態にて実施してよい。上記の形態では、各PD12A、12Bからの出力信号をA/D変換してから、これらのデジタル信号が所定の演算則に従って合成されるように演算処理部60を機能させているが、各PDからの出力信号をアナログ信号の状態で所定の演算則に従って合成されるように、図63に示した合成処理部601及び演算則設定部602のそれぞれをハードウエア回路で実現してもよい。
【0042】
上述の形態では、図2に示すように投光ファイバ13に対する位置関係が互いに相違する二つの受光ファイバ群14A、14Bが設けられているが、第2受光ファイバ群14Bの外周に複数の受光ファイバを配置して、3つの受光ファイバ群を設けてもよい。3つの受光ファイバ群を設けた場合、最も外側の第3の受光ファイバ群から導かれた反射光を受光する第3の光電変換手段を設けてもよい。これにより、各光電変換手段の信号をそれぞれ組合わせるバリエーションが増えるので、より多様な感度特性を検出手段に与えることができるようになる。
【0043】
演算則設定部602が設定する演算則は、種々のものが想定される。例えば、上述した表面異物検査モードでは、PD12Aの信号からPD12Bの信号を減算することとしたが、第2受光ファイバ群12Bに反射光の焦点を合わせた上で、PD12Bの信号からPD12Aの信号を減算してもよい。こうすることにより、図5に示した実線L3を縦軸に関して反転させた感度特性を得ることができる。この場合には、基準位置よりも反射位置が所定距離だけ離れた状態を検知できる。これにより、被検査物の表面に形成された所定距離に相当する寸法の凹部を検出することができるようになる。
【0044】
また、PD12Aの信号とPD12Bとの信号を単純に加算する演算則を設定することにより、それぞれのファイバ群の受光面積を合計した受光面積を持つ受光ファイバ群を設けた場合、つまり受光ファイバの径を拡大した場合と略同等な感度特性を得ることができる。なお、これらの信号を両方とも使用することは必須ではなく、必要に応じてこれらの信号を単独で使用することもできる。
【0045】
上述した検査装置1は、円筒状の内周面の検査に適用したが、検査ヘッド16の回転させずに軸線方向へ移動させつつ、軸線方向と直交する方向へのさせることにより平面状の表面を持つ被検査物の検査装置として用いることもできる。上述した表面異物検査モードでは、反射位置の変化に対して図5に示した感度特性を有しているので、表面検査装置1を所定の分解能で被検査物の真円率を求めることができる回転式距離計測装置として機能させることができる。
【図面の簡単な説明】
【0046】
【図1】本発明の一形態に係る表面検査装置の概略構成を示した図。
【図2】保持筒にて保持された投光ファイバ及び受光ファイバ群の先端部を示した平面模式図。
【図3】演算処理部の機能を説明するブロック図。
【図4】反射光の角度変化に関する検出ユニットの感度特性を示した図。
【図5】被検査物の反射位置までの距離変化に関する検出ユニットの感度特性を示した図。
【符号の説明】
【0047】
1 表面検査装置
5 検出ユニット(検出手段)
11 LD(光源)
12A PD(第1の光電変換手段)
12B PD(第2の光電変換手段)
13 投光ファイバ
14 受光ファイバ
14A 第1受光ファイバ群(第1の受光ファイバ群)
14B 第2受光ファイバ群(第2の受光ファイバ群)
16 検査ヘッド
30 直線駆動機構(直線駆動手段)
40 回転駆動機構(回転駆動手段)
100 被検査物
100a 内周面(表面)
601 合成処理部(合成処理手段)
602 演算則設定部(演算則設定手段)
AX 軸線
Ps1 第1の信号
Ps2 第2の信号
【特許請求の範囲】
【請求項1】
光源から投光ファイバを介して被検査物の表面に検査光を照射し、その検査光の反射光の強度を検出する検出手段を有し、前記検出手段の検出結果に基づいて前記被検査物の表面を検査する表面検査装置において、
前記検出手段は、前記投光ファイバの周囲に配置されて前記反射光を導くことができる複数の受光ファイバからなる第1の受光ファイバ群と、前記投光ファイバから見て前記第1の受光ファイバ群よりも外側に配置されて前記反射光を導くことができる複数の受光ファイバからなる第2の受光ファイバ群と、前記第1の受光ファイバ群にて導かれた反射光の強度に対応した信号を出力する第1の光電変換手段と、前記第2の受光ファイバ群にて導かれた反射光の強度に対応した信号を出力する第2の光電変換手段と、を備えることを特徴とする表面検査装置。
【請求項2】
前記第1の光電変換手段から出力された第1の信号と前記第2の光電変換手段から出力された第2の信号とを所定の演算則に基づいて組み合わせる合成処理手段と、前記検出手段の感度が所定の感度特性となるように前記所定の演算則を設定する演算則設定手段と、を更に備えることを特徴とする請求項1に記載の表面検査装置。
【請求項3】
前記演算則設定手段は、前記被検査物の表面からの反射光の角度変化に関する前記検出手段の感度が所定範囲内の角度変化に対して略平坦な感度特性となるように前記所定の演算則を設定することを特徴とする請求項2に記載の表面検査装置。
【請求項4】
前記演算則設定手段は、前記所定の演算則として、前記第2の信号に所定値を乗じたものを前記第1の信号に加算する演算則を設定することを特徴とする請求項3に記載の表面検査装置。
【請求項5】
前記演算則設定手段は、前記被検査物の反射位置までの距離変化に関する前記検出手段の感度が所定の距離だけ反射位置が近くなった場合に負のピークを持つ感度特性となるように前記所定の演算則を設定することを特徴とする請求項2に記載の表面検査装置。
【請求項6】
前記演算則設定手段は、前記所定の演算則として、前記第1の信号から前記第2の信号を減算する演算則を設定することを特徴とする請求項5に記載の表面検査装置。
【請求項7】
前記被検査物の前記表面として円筒状の内周面が設けられ、
前記検出手段は、軸状に延びる検査ヘッドの外周から前記円筒体の内周面に向かって検査光を照射するとともに、前記検査ヘッドを軸線方向に移動させる直線駆動手段と、前記検査ヘッドをその軸線の回りに回転させる回転駆動手段とを更に備えることを特徴とする請求項1〜6のいずれか一項に記載の表面検査装置。
【請求項1】
光源から投光ファイバを介して被検査物の表面に検査光を照射し、その検査光の反射光の強度を検出する検出手段を有し、前記検出手段の検出結果に基づいて前記被検査物の表面を検査する表面検査装置において、
前記検出手段は、前記投光ファイバの周囲に配置されて前記反射光を導くことができる複数の受光ファイバからなる第1の受光ファイバ群と、前記投光ファイバから見て前記第1の受光ファイバ群よりも外側に配置されて前記反射光を導くことができる複数の受光ファイバからなる第2の受光ファイバ群と、前記第1の受光ファイバ群にて導かれた反射光の強度に対応した信号を出力する第1の光電変換手段と、前記第2の受光ファイバ群にて導かれた反射光の強度に対応した信号を出力する第2の光電変換手段と、を備えることを特徴とする表面検査装置。
【請求項2】
前記第1の光電変換手段から出力された第1の信号と前記第2の光電変換手段から出力された第2の信号とを所定の演算則に基づいて組み合わせる合成処理手段と、前記検出手段の感度が所定の感度特性となるように前記所定の演算則を設定する演算則設定手段と、を更に備えることを特徴とする請求項1に記載の表面検査装置。
【請求項3】
前記演算則設定手段は、前記被検査物の表面からの反射光の角度変化に関する前記検出手段の感度が所定範囲内の角度変化に対して略平坦な感度特性となるように前記所定の演算則を設定することを特徴とする請求項2に記載の表面検査装置。
【請求項4】
前記演算則設定手段は、前記所定の演算則として、前記第2の信号に所定値を乗じたものを前記第1の信号に加算する演算則を設定することを特徴とする請求項3に記載の表面検査装置。
【請求項5】
前記演算則設定手段は、前記被検査物の反射位置までの距離変化に関する前記検出手段の感度が所定の距離だけ反射位置が近くなった場合に負のピークを持つ感度特性となるように前記所定の演算則を設定することを特徴とする請求項2に記載の表面検査装置。
【請求項6】
前記演算則設定手段は、前記所定の演算則として、前記第1の信号から前記第2の信号を減算する演算則を設定することを特徴とする請求項5に記載の表面検査装置。
【請求項7】
前記被検査物の前記表面として円筒状の内周面が設けられ、
前記検出手段は、軸状に延びる検査ヘッドの外周から前記円筒体の内周面に向かって検査光を照射するとともに、前記検査ヘッドを軸線方向に移動させる直線駆動手段と、前記検査ヘッドをその軸線の回りに回転させる回転駆動手段とを更に備えることを特徴とする請求項1〜6のいずれか一項に記載の表面検査装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2007−315825(P2007−315825A)
【公開日】平成19年12月6日(2007.12.6)
【国際特許分類】
【出願番号】特願2006−143420(P2006−143420)
【出願日】平成18年5月23日(2006.5.23)
【出願人】(390014661)キリンテクノシステム株式会社 (126)
【出願人】(505216449)株式会社 KTSオプティクス (17)
【Fターム(参考)】
【公開日】平成19年12月6日(2007.12.6)
【国際特許分類】
【出願日】平成18年5月23日(2006.5.23)
【出願人】(390014661)キリンテクノシステム株式会社 (126)
【出願人】(505216449)株式会社 KTSオプティクス (17)
【Fターム(参考)】
[ Back to top ]