
被写体追尾装置およびカメラ
【課題】被写体を正確に追尾できること。
【解決手段】被写体追尾装置は、入力画像内に設定した第1の探索範囲内の画像に対してテンプレートマッチング処理を行い、追尾被写体位置を特定する第1の追尾手段12と、入力画像内に設定した第2の探索範囲内の画像に対してラベリング処理を行い、追尾被写体位置を特定する第2の追尾手段14と、を備え、第1の追尾手段12が特定した追尾被写体位置と、第2の追尾手段14が特定した追尾被写体位置との距離が所定値未満である場合には、第1の追尾手段12または第2の追尾手段14が特定した追尾被写体位置を用いて次回の第1の探索範囲を設定し、第1の追尾手段12が特定した追尾被写体位置と、第2の追尾手段14が特定した追尾被写体位置との距離が所定値以上である場合には、第2の追尾手段14が特定した追尾被写体位置を用いて次回の第1の探索範囲を設定する。
【解決手段】被写体追尾装置は、入力画像内に設定した第1の探索範囲内の画像に対してテンプレートマッチング処理を行い、追尾被写体位置を特定する第1の追尾手段12と、入力画像内に設定した第2の探索範囲内の画像に対してラベリング処理を行い、追尾被写体位置を特定する第2の追尾手段14と、を備え、第1の追尾手段12が特定した追尾被写体位置と、第2の追尾手段14が特定した追尾被写体位置との距離が所定値未満である場合には、第1の追尾手段12または第2の追尾手段14が特定した追尾被写体位置を用いて次回の第1の探索範囲を設定し、第1の追尾手段12が特定した追尾被写体位置と、第2の追尾手段14が特定した追尾被写体位置との距離が所定値以上である場合には、第2の追尾手段14が特定した追尾被写体位置を用いて次回の第1の探索範囲を設定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、被写体追尾装置およびカメラに関する。
【背景技術】
【0002】
背景差分法と、動的2値化法と、テンプレートマッチング法とを用いて移動物体を検出する物体検出認識方法が知られている(特許文献1参照)。この方法では、背景差分法および動的2値化法により検出された物体の画像パターンをテンプレートとし、入力画像に対してこのテンプレートを用いてテンプレートマッチング処理を行うことにより、物体の位置を検出する。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2002−157599号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来技術では、テンプレートマッチング処理において被写体の位置を誤認識して、被写体の位置が探索範囲から外れてしまうと、被写体を正確に追尾できなくなるという問題があった。
【課題を解決するための手段】
【0005】
請求項1に記載の発明による被写体追尾装置は、入力画像内に第1の探索範囲を設定し、第1の探索範囲内の画像に対して、追尾被写体の基準となるテンプレート画像を基にテンプレートマッチング処理を行い、処理結果に基づいて追尾被写体位置を特定する第1の追尾手段と、入力画像内に第2の探索範囲を設定し、第2の探索範囲内の画像に対して、追尾被写体の基準となる輝度情報または色情報に基づいて設定された基準値を用いて2値化処理およびラベリング処理を行い、処理結果に基づいて追尾被写体位置を特定する第2の追尾手段と、を備え、第1の追尾手段は、第1の追尾手段が特定した追尾被写体位置と、第2の追尾手段が特定した追尾被写体位置との距離が所定値未満である場合には、第1の追尾手段または第2の追尾手段が特定した追尾被写体位置を用いて次回の第1の探索範囲を設定し、第1の追尾手段が特定した追尾被写体位置と、第2の追尾手段が特定した追尾被写体位置との距離が所定値以上である場合には、第2の追尾手段が特定した追尾被写体位置を用いて次回の第1の探索範囲を設定することを特徴とする。
請求項7に記載の発明による被写体追尾装置は、入力画像内に第1の探索範囲を設定し、第1の探索範囲内の画像に対して第1の被写体追尾処理を行い、処理結果に基づいて追尾被写体位置を特定する第1の追尾手段と、入力画像内に第2の探索範囲を設定し、第2の探索範囲内の画像に対して、第2の被写体追尾処理を行い、処理結果に基づいて追尾被写体位置を特定する第2の追尾手段と、を備え、第1の被写体追尾処理は、第2の被写体追尾処理よりも高速の処理であり、第2の被写体追尾処理は、第1の被写体追尾処理よりも高精度の処理であり、第1の追尾手段は、第1の追尾手段が特定した追尾被写体位置と、第2の追尾手段が特定した追尾被写体位置との距離が所定値未満である場合には、第1の追尾手段または第2の追尾手段が特定した追尾被写体位置を用いて次回の第1の探索範囲を設定し、第1の追尾手段が特定した追尾被写体位置と、第2の追尾手段が特定した追尾被写体位置との距離が所定値以上である場合には、第2の追尾手段が特定した追尾被写体位置を用いて次回の第1の探索範囲を設定することを特徴とする。
請求項8に記載の発明によるカメラは、請求項1〜7のいずれか一項に記載の被写体追尾装置を備えることを特徴とする。
【発明の効果】
【0006】
本発明によれば、被写体を正確に追尾できる。
【図面の簡単な説明】
【0007】
【図1】本発明の一実施の形態による被写体追尾装置を搭載したデジタルカメラの構成を説明する図である。
【図2】デジタルカメラの概略的な動作の流れを示すフローチャートである。
【図3】テンプレートマッチング追尾処理とラベリング追尾処理の実行タイミングを説明する図である。
【図4】ラベリング追尾処理の流れを示すフローチャートである。
【図5】ラベリング追尾処理を説明する図である。
【図6】テンプレートマッチング追尾処理の流れを示すフローチャートである。
【図7】テンプレートマッチング追尾処理を説明する図である。
【図8】テンプレートマッチング追尾処理を説明する図である。
【図9】テンプレートマッチング追尾処理を説明する図である。
【図10】変形例1によるテンプレートマッチング追尾処理とラベリング追尾処理の実行タイミングを説明する図である。
【図11】変形例2によるテンプレートマッチング追尾処理とラベリング追尾処理の実行タイミングを説明する図である。
【発明を実施するための形態】
【0008】
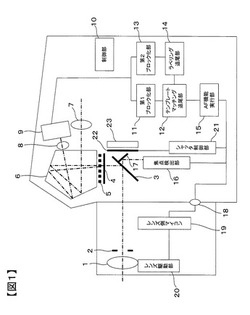
以下、図面を参照して本発明を実施するための形態について説明する。図1は、本発明の一実施の形態による被写体追尾装置を搭載したデジタルカメラの概略的な構成を示す側面図である。
【0009】
撮影レンズ1および絞り2を介して入射した撮影光束は、図1に例示するミラーダウン状態にある一部半透過のクイックリターンミラー3によって上方へ折り曲げられ、焦点板4へ導かれる。焦点板4へ入射された撮影光束は、撮影レンズ1によって焦点板4の拡散面に結像する。焦点板4で拡散された撮影光束は、ペンタプリズム6へ入射される。ペンタプリズム6は、拡散された被写体光を接眼レンズ7へ導く。ユーザは、不図示の接眼部から接眼レンズ7を通して被写体像を観察可能である。
【0010】
また、焦点板4で拡散された撮影光束の一部は、測光レンズ8を介して第1撮像素子9の受光面に再結像する。第1撮像素子9は、撮影光束を受光して、測光用の画像信号を出力する。この画像信号は、不図示の画像処理回路を介して第1ブロック化部11および第2ブロック化部13に入力される。
【0011】
また、クイックリターンミラー3を透過した一部の撮影光束は、サブミラー17によって下方へ折り曲げられ、位相差検出方式の焦点検出部16へ導かれる。焦点検出部16は、撮影光束を受光して得られる受光信号に基づいて撮影レンズ1のデフォーカス量を求める。なお、焦点検出部16は、撮影画面内の複数位置を測距点とし、各測距点に関するデフォーカス量を検出可能となっている。
【0012】
第1ブロック化部11は、第1撮像素子9で得られた画像信号を所定数のブロックに分割し、ブロックごとに画像情報(色情報や輝度情報など)を平均化することにより、第1ブロック化画像を生成する。なお、以下の説明では、第1ブロック化画像における1つのブロックを、第1ブロック化画像における1つの画素として説明する。第1ブロック化部11は、生成した第1ブロック化画像をテンプレートマッチング追尾部12へ出力する。
【0013】
テンプレートマッチング追尾部12は、第1ブロック化部11から入力された第1ブロック化画像を用いてテンプレートマッチング追尾処理を行う。テンプレートマッチング追尾処理は、公知のテンプレートマッチング処理を行うことにより、撮影画像内における追尾対象の被写体(追尾被写体)の位置を特定する処理である(詳しくは後述する)。テンプレートマッチング追尾部12は、特定した追尾被写体の位置をAF機能実行部15へ出力する。
【0014】
第2ブロック化部13は、第1撮像素子9で得られた画像信号を、第1ブロック化部11で分割するブロック数よりも多いブロック数で分割し、ブロックごとに画像情報(色情報や輝度情報など)を平均化することにより、第2ブロック化画像を生成する。なお、以下の説明では、第2ブロック化画像における1つのブロックを、第2ブロック化画像における1つの画素として説明する。第2ブロック化部13は、生成した第2ブロック化画像をラベリング追尾部14へ出力する。
【0015】
ラベリング追尾部14は、第2ブロック化部13から入力された第2ブロック化画像を用いてラベリング追尾処理を行う。ラベリング追尾処理は、公知の2値化処理およびラベリング処理を行うことにより、撮影画像内における追尾被写体の位置を特定する処理である(詳しくは後述する)。ラベリング追尾部14は、特定した追尾被写体の位置をテンプレートマッチング追尾部12へ出力する。テンプレートマッチング追尾部12は、ラベリング追尾部14から出力された追尾被写体の位置を、テンプレートマッチング追尾処理に反映するよう構成されている(詳しくは後述する)。
【0016】
AF機能実行部15は、テンプレートマッチング追尾部12から出力された追尾被写体の位置に基づいて焦点検出部16の測距点(AFエリア)を選択し、選択した測距点に関するデフォーカス量を焦点検出部16から取得する。AF機能実行部15は、取得したデフォーカス量を基にレンズ駆動量を演算し、信号接点18を介してレンズ側マイコン19へ出力する。レンズ側マイコン19は、AF機能実行部15からのレンズ駆動量を基にレンズ駆動部20に駆動信号を送り、撮影レンズ1を駆動させる。この結果、追尾被写体の位置に焦点が調節される。
【0017】
制御部10は、第1撮像素子9、第1ブロック化部11、テンプレートマッチング追尾部12、第2ブロック化部13、ラベリング追尾部14、AF機能実行部15、および焦点検出部16などのデジタルカメラの各機能の動作を制御する。
【0018】
また、デジタルカメラにはユーザが操作する操作部材(不図示)が配置される。操作部材は、ユーザにより操作されると、各操作に応じた操作信号を制御部10へ送出する。操作部材には、シャッターボタンの半押し時にオンする半押しスイッチ、シャッターボタンの全押し時オンする全押しスイッチ、AFエリアの移動を行うためのエリア移動スイッチなどが含まれる。ユーザは、例えば、エリア移動スイッチを操作することにより、所望のAFエリアを選択することができる。AFエリア表示部5は、焦点板4上の被写体像にAFエリアを重畳表示する。
【0019】
シャッターレリーズ後は、クイックリターンミラー3が上方へ回動し、全ての撮影光束はシャッター制御部21の制御のもと開駆動されるシャッター22を介して第2撮像素子23へ導かれ、その撮像面上に被写体像を結像する。第2撮像素子23は、被写体像を撮像して、撮影用の画像信号を出力する。撮像が終了するとシャッター22が閉駆動され、クイックリターンミラー3がミラーダウン状態へ戻る。
【0020】
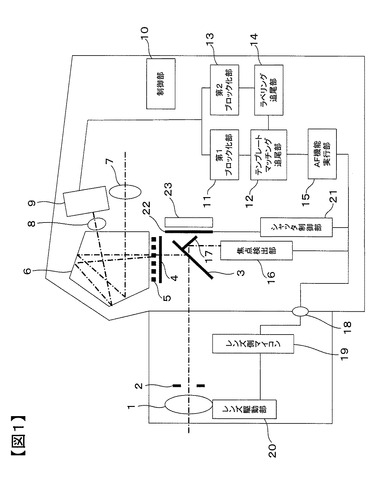
図2は、本実施形態によるデジタルカメラの概略的な動作を示すフローチャートである。制御部10は、デジタルカメラの電源がオンされると、図2に例示する処理を起動する。ステップS001において制御部10は、第1撮像素子9を制御して画像信号を取得させ、ステップS002へ進む。
【0021】
ステップS002において制御部10は、追尾動作を行う。すなわち、テンプレートマッチング追尾部12およびラベリング追尾部14を制御して、第1撮像素子9からの画像信号を基に、テンプレートマッチング追尾処理およびラベリング追尾処理を行わせ、ステップS003へ進む。
【0022】
ステップS003において制御部10は、AF動作を行う。すなわち、AF機能実行部15および焦点検出部16を制御して、ステップS002のテンプレートマッチング追尾処理の結果を基に測距点を選択させ、選択した測距点に関するデフォーカス量を演算させる。そして、このデフォーカス量に基づいてレンズ駆動量を演算させ、レンズ側マイコン19に出力させる。この結果、撮影レンズ1が駆動させ、追尾被写体の位置に焦点が調節される。制御部10は、上記ステップS001からステップS003までの処理を繰り返し行うことにより、デジタルカメラ全体として被写体を追尾してオートフォーカスを行うことができる。
【0023】
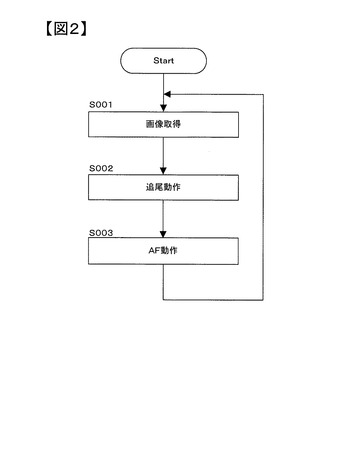
なお、制御部10は、上記テンプレートマッチング追尾処理およびラベリング追尾処理を並列的に行わせる。図3は、テンプレートマッチング追尾処理およびラベリング追尾処理の実行タイミングを説明する図である。図3の白帯は、処理の実行中であることを示す。テンプレートマッチング追尾部12およびラベリング追尾部14は、1つのマイコンで構成される。この1つのマイコンが、テンプレートマッチング追尾処理およびラベリング追尾処理を非同期で実行する。
【0024】
具体的に、テンプレートマッチング追尾部12は、所定時間間隔ごとに繰り返しテンプレートマッチング追尾処理を実行する。ラベリング追尾部14も繰り返しラベリング追尾処理を実行するが、テンプレートマッチング追尾部12が演算を行っていない間にラベリング追尾処理を実行する。したがって、ラベリング追尾処理の実行中に、テンプレートマッチング追尾処理が開始される際にはラベリング追尾処理を一時中断し、テンプレートマッチング追尾処理が終了するとラベリング追尾処理を再開する。
【0025】
このようにテンプレートマッチング追尾処理をラベリング追尾処理よりも優先するのは、以下の理由による。テンプレートマッチング処理は、ラベリング処理よりも演算負荷が軽く演算速度が速い。また、上述したように、テンプレートマッチング追尾処理で用いる第1ブロック化画像は、ラベリング追尾処理で用いる第2ブロック化画像よりも画素数(ブロック数)が少ない。したがってテンプレートマッチング追尾処理の処理時間をラベリング追尾処理の処理時間よりも短くできるため、テンプレートマッチング追尾処理では、追尾被写体位置をリアルタイムに特定することができる。ゆえにテンプレートマッチング追尾処理を優先して、リアルタイム性を保持させている。
【0026】
一方、ラベリング処理は、テンプレートマッチング処理よりも演算速度が遅く処理時間が長くなるが、テンプレートマッチング処理よりも被写体形状の変化などに強い。またラベリング追尾処理では、画素数(ブロック数)の多い第2ブロック化画像を用いる。したがって、ラベリング追尾処理は、テンプレートマッチング追尾処理よりも追尾被写体位置を精度よく特定できる。そこで、本実施形態では、テンプレートマッチング追尾処理が行われていない間にラベリング追尾処理を行い、ラベリング追尾処理の結果をテンプレートマッチング追尾処理に反映させることで、テンプレートマッチング追尾処理の精度を向上するようになっている(詳しくは後述する)。
【0027】
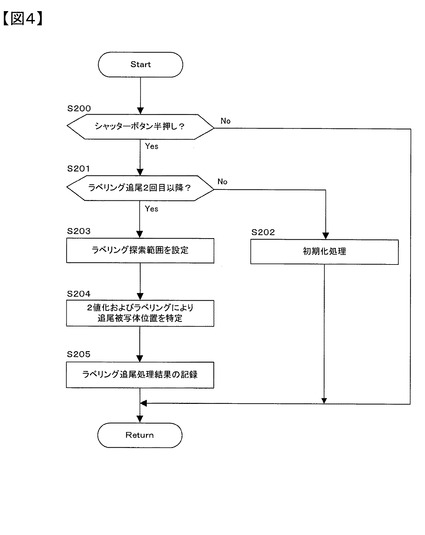
図4は、ラベリング追尾部14が行うラベリング追尾処理を示すフローチャートである。ステップS200においてラベリング追尾部14は、シャッターボタンが半押し状態か否かを判定する。シャッターボタンが半押し状態である場合には、ラベリング追尾部14は、ステップS200を肯定判定し、ステップS201へ進む。一方、シャッターボタンが半押し状態ではない場合には、ラベリング追尾部14は、ステップS200を否定判定して図4の処理を終了し、図2のステップS002へ戻る。
【0028】
ステップS201においてラベリング追尾部14は、ラベリング追尾処理が2回目以降であるか否かを判定する。ここで、ラベリング追尾処理の回数は、シャッターボタンが半押しされた後、最初に行ったラベリング追尾処理を1回目として数える。なお、シャッターボタンの半押し操作が解除された場合は、この回数をリセットする。ラベリング追尾処理が2回目以降である場合には、ラベリング追尾部14は、ステップS201を肯定判定してステップS203へ進む。一方、ラベリング追尾処理が2回目以降ではない(すなわち1回目である)場合には、ラベリング追尾部14は、ステップS201を否定判定してステップS202へ進む。
【0029】
ステップS202においてラベリング追尾部14は、ラベリング追尾処理における初期化処理を行う。この初期化処理では、追尾被写体情報の初期化と各変数の初期化とを行う。まず、追尾被写体情報の初期化について説明する。ラベリング追尾部14は、第2ブロック化部13から入力された第2ブロック化画像において、ユーザにより選択されたAFエリアに対応する画素(例えばAFエリアを含む画素、以下AFエリア画素と呼ぶ)の画像情報(色情報または輝度情報)を、仮の追尾被写体情報として設定する。一般的に、ユーザは、ユーザ自身で選択したAFエリアに撮影したい被写体が入るようにデジタルカメラを構えるからである。
【0030】
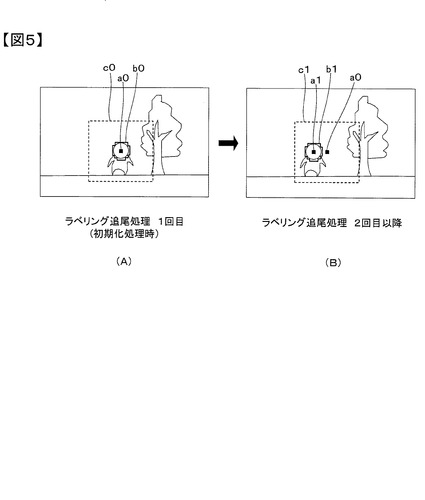
次にラベリング追尾部14は、図5(A)に示すように、第2ブロック化部13から入力される第2ブロック化画像において、上記AFエリア画素a0の位置を中心とした所定サイズの探索範囲c0を設定し、この探索範囲c0内の画像に対して2値化処理を行う。なお、ラベリング追尾処理において設定する探索範囲を、以下ラベリング探索範囲と呼ぶ。この2値化処理では、上記仮の追尾被写体情報を基に閾値を設定し、この閾値を用いて2値化を行うことにより、上記仮の追尾被写体情報と類似する色情報または輝度情報を有する画素を抽出する。
【0031】
そしてラベリング追尾部14は、公知のラベリング処理により、上記2値化処理で抽出された画素の連続している部分をグループ化する。ラベリング追尾部14は、ラベリングにより生成した複数のグループの中から、上記AFエリア画素a0を含むグループb0を追尾被写体領域として推定する。ラベリング追尾部14は、追尾被写体領域として推定したグループb0に含まれる画素の色情報または輝度情報の平均値を算出し、算出結果を追尾被写体情報として設定する。
【0032】
なお、上記2値化処理およびラベリング処理では、AFエリア画素a0の色情報または輝度情報と類似する色情報または輝度情報を有する画素の領域を抽出してグループ化するようにしたが、周辺領域(例えばAFエリアの周囲の領域)の色情報または輝度情報と異なる色情報または輝度情報を有する画素の領域を抽出してグループ化するようにしてもよい。
【0033】
次に各変数の初期化について説明する。ラベリング追尾処理における変数としては、追尾被写体位置、演算時刻および追尾被写体の大きさ情報が設けられている。各変数の初期化では、AFエリア画素a0の位置を追尾被写体位置とし、シャッターボタンの半押し開始時刻を演算時刻とし、追尾被写体領域として推定したグループb0の連結画素数を追尾被写体の大きさ情報とする。
【0034】
以上のように追尾被写体情報の初期化と各変数の初期化とを行うと、ラベリング追尾部14は、初期化した追尾被写体情報と各変数(追尾被写体位置、演算時刻、追尾被写体の大きさ情報)を、不図示のメモリに記録する。その後、ラベリング追尾部14は、図4の処理を終了し、図2のステップS002に戻る。
【0035】
一方、ラベリング追尾処理が2回目以降である場合にステップS201を肯定判定して進むステップS203において、ラベリング追尾部14は、前回(1回目を含む)のラベリング追尾処理の際に記録した追尾被写体位置a0をメモリから読み出す。そしてラベリング追尾部14は、図5(B)に示すように、第2ブロック化部13から入力された第2ブロック化画像において、前回の追尾被写体位置a0を中心とする所定サイズの範囲を今回のラベリング探索範囲c1として設定し、ステップS204へ進む。
【0036】
ステップS204においてラベリング追尾部14は、ステップS203で設定したラベリング探索範囲c1内の画像に対して2値化処理を行う。この2値化処理では、初期化処理(ステップS202)で設定した追尾被写体情報を基に閾値を設定し、この閾値を用いて2値化を行うことにより、上記追尾被写体情報と類似する色情報または輝度情報を有する画素を抽出する。
【0037】
ラベリング追尾部14は、公知のラベリング処理により、上記2値化処理で抽出された画素の連続している部分をグループ化する。ラベリング追尾部14は、ラベリング処理により生成した複数のグループの中から、例えば前回の追尾被写体位置a0に最も近い位置にあるグループb1を、追尾被写体領域として推定する。なお、連結画素数が前回の追尾被写体の大きさ情報に最も近いグループb1を追尾被写体領域として推定するようにしてもよい。ラベリング追尾部14は、追尾被写体領域として推定したグループb1の重心位置を、今回の追尾被写体位置a1として特定する。
【0038】
また、ラベリング追尾部14は、追尾被写体領域として推定したグループb1の連結画素数を今回の追尾被写体の大きさ情報とし、今回のラベリング追尾処理における演算開始時刻(ステップS201の半押し判定を開始した時刻)を今回の演算時刻とする。このようにしてラベリング追尾部14は、2値化処理およびラベリング処理により追尾被写体位置を特定すると、ステップS205へ進む。ステップS205において、ラベリング追尾部14は、ステップS204で更新した各変数(追尾被写体位置、追尾被写体の大きさ情報、演算時刻)を不図示のメモリに記録する。これらの情報は、ラベリング追尾処理を行うたびに毎回記録されるので、時系列的に複数記録される。
【0039】
このようにラベリング追尾処理では、前回の追尾被写体位置を用いて今回のラベリング探索範囲を決定する。そして、今回のラベリング探索範囲内の画像に対して2値化処理およびラベリング処理を行うことにより、今回の追尾被写体領域(ラベリング処理によるグループ)、および追尾被写体位置を特定することができる。
【0040】
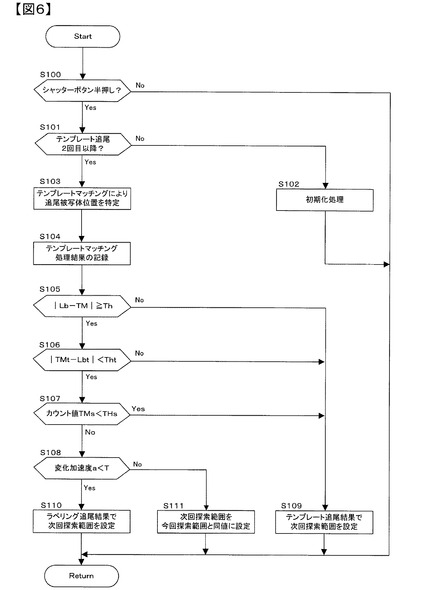
図6は、テンプレートマッチング追尾部12が行うテンプレートマッチング追尾処理を示すフローチャートである。ステップS100においてテンプレートマッチング追尾部12は、シャッターボタンが半押し状態か否かを判定する。シャッターボタンが半押し状態である場合には、テンプレートマッチング追尾部12は、ステップS100を肯定判定し、ステップS101へ進む。一方、シャッターボタンが半押し状態ではない場合には、テンプレートマッチング追尾部12は、ステップS100を否定判定して図6の処理を終了し、図2のステップS002へ戻る。
【0041】
ステップS101においてテンプレートマッチング追尾部12は、テンプレートマッチング追尾処理が2回目以降であるか否かを判定する。ここで、テンプレートマッチング追尾処理の回数は、シャッターボタンが半押しされた後、最初に行ったテンプレートマッチング追尾処理を1回目として数える。なお、シャッターボタンの半押し操作が解除された場合は、この回数をリセットする。テンプレートマッチング追尾処理が2回目以降である場合には、テンプレートマッチング追尾部12は、ステップS101を肯定判定してステップS103へ進む。一方、テンプレートマッチング追尾処理が2回目以降ではない(すなわち1回目である)場合には、テンプレートマッチング追尾部12は、ステップS101を否定判定してステップS102へ進む。
【0042】
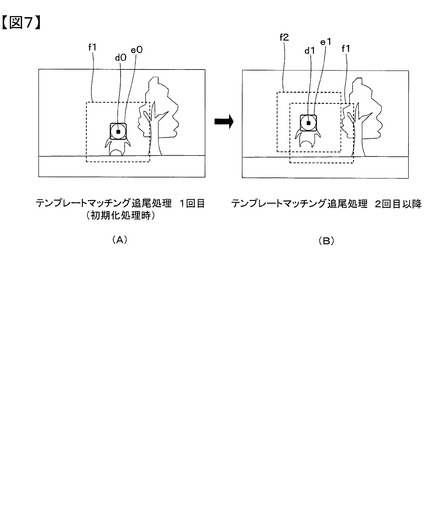
ステップS102においてテンプレートマッチング追尾部12は、テンプレートマッチング追尾処理における初期化処理を行う。この初期化処理では、第1ブロック化部11から入力された第1ブロック化画像において、図7(A)に示すように、ユーザにより選択されたAFエリアに対応する位置(例えばAFエリアの中心位置、以下AEエリア位置と呼ぶ)d0を中心とした所定サイズの範囲e0をテンプレート画像として設定する。
【0043】
またテンプレートマッチング追尾部12は、上記AFエリア位置d0を中心とした所定サイズの探索範囲を、次回のテンプレートマッチング追尾処理における探索範囲f1として設定する。なお、テンプレートマッチング追尾処理において設定する探索範囲を、以下テンプレート探索範囲と呼ぶ。その後、テンプレートマッチング追尾部12は、図6の処理を終了し、図2のステップS002に戻る。
【0044】
一方、テンプレートマッチング追尾処理が2回目以降である場合にステップS101を肯定判定して進むステップS103において、テンプレートマッチング追尾部12は、図7(B)に示すように、第1ブロック化部11から入力された第1ブロック化画像から、前回(1回目を含む)のテンプレートマッチング追尾処理において設定したテンプレート探索範囲(すなわち今回のテンプレート探索範囲)f1内の画像を切り出す。
【0045】
テンプレートマッチング追尾部12は、切り出した画像に対して、初期化処理(ステップS102)で設定したテンプレート画像を用いて公知のテンプレートマッチング処理を行う。具体的には、テンプレート探索範囲f1内の画像に対してテンプレート画像を1画素ずつ動かしながら、これらの画像の画像情報(色情報または輝度情報など)の差分演算を行い、テンプレート探索範囲f1内の画像においてテンプレート画像との差分値が最も小さい領域e1を追尾被写体領域として推定する。そして、追尾被写体領域e1の中心位置を、追尾被写体位置d1として特定する。
【0046】
なお、追尾被写体領域e1における上記差分値、すなわち最小差分値は、追尾被写体領域e1の画像とテンプレート画像との類似度を示す値である。この最小差分値が小さいほど、追尾被写体領域e1の画像とテンプレート画像との類似度が高く、追尾被写体領域e1の画像が追尾被写体に類似していると判断できる。
【0047】
また、テンプレートマッチング追尾部12は、テンプレート探索範囲f1内において、テンプレート画像との差分値が上記最小差分値に近い(すなわち上記最小差分値との差分が所定の判定閾値以下である)領域をカウントする。このカウント値は、上記特定した追尾被写体位置d1の信頼度を示す値である。カウント値が小さいほど、追尾被写体領域e1以外ではテンプレート画像と類似する領域が少ないため、追尾被写体領域e1が追尾被写体を正確に捉えている可能性が高く、追尾被写体位置d1の信頼度が高いと判断できる。
【0048】
このようにテンプレートマッチング処理を用いて追尾被写体位置d1を特定すると、テンプレートマッチング追尾部12は、ステップS104へ進む。ステップS104においてテンプレートマッチング追尾部12は、上記最小差分値(テンプレート画像との類似度を示す値)、上記カウント値(追尾被写体位置の信頼度を示す値)、および今回のテンプレートマッチング追尾処理における演算開始時刻(ステップS101の半押し判定を開始した時刻)をメモリに記録する。なお、これらの情報は、テンプレートマッチング追尾処理を行うたびに毎回記録されるので、時系列的に複数記録される。その後、テンプレートマッチング追尾部12は、ステップS105へ進む。
【0049】
ステップS105においてテンプレートマッチング追尾部12は、最新のラベリング追尾処理により特定された追尾被写体位置Lbをメモリから読み出す。そして、ステップS104で特定した(すなわちテンプレートマッチングによる)追尾被写体位置TMと、ラベリングによる追尾被写体位置Lbとの距離を算出し、これらの距離が所定の判定閾値Th以上であるか否かを判定する。
【0050】
上記距離が判定閾値Th以上であることは、テンプレートマッチング追尾処理の結果とラベリング追尾処理の結果とが異なることを意味する。この場合、これらの処理のいずれかが誤認識である可能性がある。上述したように、通常、テンプレートマッチング追尾処理よりもラベリング追尾処理の方が追尾精度が高いため、特にテンプレートマッチング処理において追尾被写体位置TMを誤認識している可能性が高い。この場合のテンプレートマッチング追尾部12は、ステップS105を肯定判定してステップS106へ進む。
【0051】
一方、上記距離が判定閾値Th未満であることは、テンプレートマッチング追尾処理の結果とラベリング追尾処理の結果とがほぼ同一であることを意味する。この場合には、テンプレートマッチングによる追尾被写体位置TMおよびラベリングによる追尾被写体位置Lbの双方が正確である可能性が高い。この場合のテンプレートマッチング追尾部12は、ステップS105を否定判定してステップS109へ進む。ステップS109において、テンプレートマッチング追尾部12は、図7(B)に示すように、テンプレートマッチングによる追尾被写体位置d1を中心とした所定サイズの範囲を、次回のテンプレート探索範囲f2として設定して、図6の処理を終了する。
【0052】
ステップS105を肯定判定して進むステップS106において、テンプレートマッチング追尾部12は、テンプレートマッチングによる追尾被写体位置TMの演算時刻TMtと、ラベリングによる追尾被写体位置Lbの演算時刻Lbtとの差分を算出し、この差分の絶対値が所定の判定閾値Tht未満であるか否かを判定する。
【0053】
上述したように、テンプレートマッチング追尾処理とラベリング追尾処理とは、それぞれ処理にかかる時間が異なるため、処理結果が得られる時間が異なる。ラベリングによる追尾被写体位置Lbの演算時刻Lbtがテンプレートマッチングによる追尾被写体位置TMの演算時刻TMtから離れ過ぎている場合、ラベリング処理結果が古く現在の追尾被写体位置を捉えていない可能性が高い。そこで、テンプレートマッチング追尾部12は、上記差分の絶対値が判定閾値Tht以上である場合、ステップS106を否定判定して上述したステップS103へ進む。そして、テンプレートマッチングによる追尾被写体位置TMを用いて次回のテンプレート探索範囲f2を設定して、図6の処理を終了する。
【0054】
一方、上記差分の絶対値が判定閾値Tht未満である場合は、ラベリングによる追尾被写体位置Lbが現在の追尾被写体位置を捉えている可能性が高い。この場合のテンプレートマッチング追尾部12は、ステップS106を肯定判定してステップS107へ進む。
【0055】
ステップS107において、テンプレートマッチング追尾部12は、テンプレートマッチングによる追尾被写体位置TMの信頼度が高いか否かを判定する。具体的には、テンプレートマッチングによる追尾被写体位置TMの信頼度を示す値(上記カウント値)TMsが所定の判定閾値THs未満であるか否かを判定する。テンプレートマッチング追尾部12は、上記カウント値TMsが判定閾値THs未満である場合、テンプレートマッチングによる追尾被写体位置TMの信頼度が高いと判定する。この信頼度が高い場合には、ラベリングによる追尾被写体位置Lbよりもテンプレートマッチングによる追尾被写体位置TMの方が現在の追尾被写体位置を正確に捉えていることが推測される。そこで、この場合のテンプレートマッチング追尾部12は、ステップS107を肯定判定し、ステップS103へ進む。そして、テンプレートマッチングによる追尾被写体位置TMを用いて次回のテンプレート探索範囲f2を設定して、図6の処理を終了する。
【0056】
一方、テンプレートマッチング追尾部12は、上記カウント値TMsが判定閾値THs以上である場合、追尾被写体位置TMの信頼度が低いと判定してステップS107を否定判定し、ステップS108へ進む。
【0057】
なお、上記カウント値TMsが判定閾値THs未満であっても、上記最小差分値が大きい場合には、追尾被写体領域e1の画像とテンプレート画像との類似度が低く、追尾被写体位置TMが追尾被写体位置を捉えていない可能性が高い。そこで上記カウント値TMsが判定閾値THs未満であっても、上記最小差分値が所定の判定閾値以上である場合には、追尾被写体位置TMの信頼度が低いと判定してステップS107を否定判定し、ステップS108へ進むようにしてもよい。
【0058】
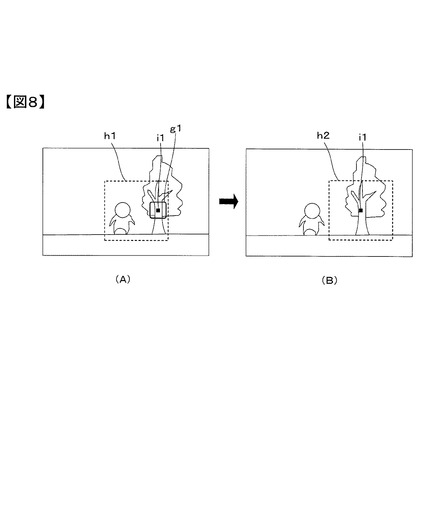
ステップS105からステップS107の判定を経てステップS108に達したことは、テンプレートマッチングによる追尾被写体位置TMが誤認識である可能性が高いことを意味する。例えば、図8(A)に示すように、テンプレート探索範囲h1内においてテンプレートマッチング処理を行って推定した追尾被写体領域g1が誤っていた場合、追尾被写体領域g1を基に特定する追尾被写体位置i1も誤った位置となる。図8(B)に示すように、誤った追尾被写体位置i1を中心とした所定サイズの範囲を次回のテンプレート探索範囲h2として設定した場合、追尾被写体がテンプレート探索範囲h2から外れてしまう。この場合、テンプレートマッチング処理を行っても、正確に追尾被写体位置を特定することができない。そこで、ステップS105からステップS107の判定を経てステップS108に達した場合には、以下に述べるとおり、テンプレートマッチングによる追尾被写体位置TMを用いずに次回のテンプレート探索範囲を設定する。
【0059】
ステップS108においてテンプレートマッチング追尾部12は、ラベリング追尾部14で推定した追尾被写体の大きさ情報の変化度合いを基にラベリングによる追尾被写体位置Lbの信頼度が高いか否かを判定する。具体的には、ラベリング追尾処理における最新(今回)の追尾被写体の大きさ情報S1および演算時刻t1と、前回の追尾被写体の大きさ情報S2および演算時刻t2と、前々回の追尾被写体の大きさ情報S3および演算時刻t3とをメモリから読み出す。そして、読み出したこれらの情報を、追尾被写体の大きさ情報Sを演算時刻tの2次関数で表した次式(1)に代入する。なお、次式(1)におけるa、b、cは係数である。
S=f(t)=at2+bt+c … (1)
【0060】
上記代入の結果、3元一次の連立方程式である次式(2)〜(4)を得る。
S1=a(t1)2+b(t1)+c … (2)
S2=a(t2)2+b(t2)+c … (3)
S3=a(t3)2+b(t3)+c … (4)
【0061】
そして、次式(5)を用いて、上記式(2)〜(4)をtの二次の係数aについて解くことにより、追尾被写体の大きさ情報の変化加速度aを算出する。
【数1】

【0062】
追尾被写体の大きさ情報の変化加速度aの絶対値が大きい場合、追尾被写体領域として推定したグループの大きさが急激に変化したことを意味する。実際上、追尾被写体がデジタルカメラに対して近づいたり遠ざかったりする場合には、撮影画像内において追尾被写体の大きさが徐々に変化することが多いが、追尾被写体の大きさが急激に変化する可能性は低い。したがって、追尾被写体領域と推定したグループの大きさが急激に変化した場合は、ラベリング追尾部14が誤認識した可能性が高い。
【0063】
そこで、テンプレートマッチング追尾部12は、上記変化加速度aが所定の判定閾値T未満である場合は、ラベリングによる追尾被写体位置Lbの信頼度が高いと判定してステップS108を肯定判定し、ステップS110へ進む。一方、テンプレートマッチング追尾部12は、上記変化加速度aが判定閾値T以上である場合は、ラベリングによる追尾被写体位置Lbの信頼度が低いと判定してステップS108を否定判定し、ステップS111へ進む。
【0064】
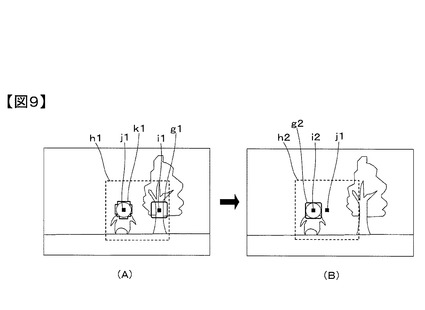
ステップS110へ進むことは、テンプレートマッチングによる追尾被写体位置TMは誤認識の可能性が高いが、ラベリングによる追尾被写体位置Lbは信頼できることを意味する。例えば、図9(A)に示すように、テンプレート探索範囲h1内においてテンプレートマッチング処理を行って推定した追尾被写体領域g1が誤認識であった場合、追尾被写体領域g1を基に特定する追尾被写体位置i1も誤った位置となる。しかしながら、ラベリング処理により推定した追尾被写体領域k1が正確であった場合、追尾被写体領域k1を基に特定する追尾被写体位置j1も正確な位置となる。そこで、図9(B)に示すように、この正確な追尾被写体位置j1を中心とした所定サイズの範囲を次回のテンプレート探索範囲h2として設定すれば、テンプレート探索範囲h2から追尾被写体が外れず、次回のテンプレートマッチング追尾処理において、追尾被写体領域g2および追尾被写体位置i2を正確に特定できる。
【0065】
そこでステップS110において、テンプレートマッチング追尾部12は、ラベリングによる追尾被写体位置Lbを中心とした所定サイズの範囲を次回のテンプレート探索範囲として設定する。その後、図6の処理を終了し、図2のステップS002に戻る。
【0066】
一方、ステップS111へ進むことは、テンプレートマッチングによる追尾被写体位置TMとラベリングによる追尾被写体位置Lbの双方が信頼できないことを意味する。そこでステップS111においてテンプレートマッチング追尾部12は、今回のテンプレート探索範囲と同様の範囲を、次回のテンプレート探索範囲として設定する。すなわち、テンプレート探索範囲を変更しない。その後、図6の処理を終了し、図2のステップS002に戻る。
【0067】
以上説明した実施形態によれば、次の作用効果が得られる。
(1)被写体追尾装置は、第1ブロック化画像内にテンプレート探索範囲を設定し、テンプレート探索範囲内の画像に対して、追尾被写体の基準となるテンプレート画像を基にテンプレートマッチング処理を行い、当該処理結果に基づいて追尾被写体位置TMを特定するテンプレートマッチング追尾部12と、第2ブロック化画像内にラベリング探索範囲を設定し、ラベリング探索範囲内の画像に対して、追尾被写体の基準となる輝度情報または色情報(追尾被写体情報)に基づいて設定された基準値(閾値)を用いて2値化処理およびラベリング処理を行い、当該処理結果に基づいて追尾被写体位置Lbを特定するラベリング追尾部14と、を備え、テンプレートマッチング追尾部12は、テンプレートマッチング追尾部12が特定した追尾被写体位置TMと、ラベリング追尾部14が特定した追尾被写体位置Lbとの距離が所定の判定閾値Th未満である場合には、テンプレートマッチング追尾部12が特定した追尾被写体位置TMを用いて次回のテンプレート探索範囲を設定し、テンプレートマッチング追尾部12が特定した追尾被写体位置TMと、ラベリング追尾部14が特定した追尾被写体位置Lbとの距離が所定の判定閾値Th以上である場合には、ラベリング追尾部14が特定した追尾被写体位置Lbを用いて次回のテンプレート探索範囲を設定するように構成したので、被写体を正確に追尾できる。例えば、被写体の形状が変化した場合やテンプレート画像に背景成分を含んだ場合にテンプレートマッチング追尾部12が追尾被写体位置TMを誤認識した場合に、ラベリング追尾部14が特定した追尾被写体位置Lbを用いて次回のテンプレート探索範囲を設定できるので、追尾被写体位置がテンプレート探索範囲から外れることなく、被写体の追尾を精度よく継続することができる。
【0068】
(2)上記(1)の被写体追尾装置において、テンプレートマッチング追尾部12は、テンプレートマッチング追尾部12が特定した追尾被写体位置TMと、ラベリング追尾部14が特定した追尾被写体位置Lbとの距離が所定の判定閾値Th以上であっても、ラベリング追尾部14が特定した追尾被写体位置TMの演算時刻がテンプレートマッチング追尾部12が特定した追尾被写体位置Lbの演算時刻から所定時間Tht以上離れている場合には、テンプレートマッチング追尾部12が特定した追尾被写体位置TMを用いて次回のテンプレート探索範囲を設定するように構成したので、古いラベリング追尾処理の結果を用いてしまうのを防止できる。
【0069】
(3)上記(1)または(2)の被写体追尾装置において、テンプレートマッチング追尾部12は、テンプレートマッチング追尾部12が特定した追尾被写体位置TMの信頼度を判定し、テンプレートマッチング追尾部12が特定した追尾被写体位置TMと、ラベリング追尾部14が特定した追尾被写体位置Lbとの距離が所定の判定閾値Th以上であっても、上記信頼度が高いと判定した場合には、テンプレートマッチング追尾部12が特定した追尾被写体位置TMを用いて次回のテンプレート探索範囲を設定するように構成したので、2つの被写体追尾処理のうち追尾被写体位置を正確に捉えている方の処理結果を用いて適切に次回のテンプレート探索範囲を設定できる。
【0070】
(4)上記(1)〜(3)の被写体追尾装置において、テンプレートマッチング追尾部12は、ラベリング追尾部14が特定した追尾被写体位置Lbの信頼度を判定し、テンプレートマッチング追尾部12が特定した追尾被写体位置TMと、ラベリング追尾部14が特定した追尾被写体位置Lbとの距離が所定の判定閾値Th以上であっても、上記信頼度が低いと判定した場合には、今回と同様のテンプレート探索範囲を次回のテンプレート探索範囲として設定するように構成したので、テンプレートマッチング追尾処理およびラベリング追尾処理の双方が誤認識した場合でも、追尾被写体がテンプレート探索範囲から外れるのを防止できる。
【0071】
(5)上記(1)〜(4)の被写体追尾装置において、入力画像(第1撮像素子9からの画像)を、第1の数のブロックに分割する第1ブロック化部11と、入力画像を、第1の数よりも多い第2の数のブロックに分割する第2ブロック化部13と、をさらに備え、テンプレートマッチング追尾部12は、第1の数のブロックに分割された入力画像を用いてテンプレートマッチング処理を行い、ラベリング追尾部14は、第2の数のブロックに分割された入力画像を用いて2値化処理およびラベリング処理を行うように構成したので、テンプレートマッチング追尾処理においては演算負荷を軽くしてリアルタイム性を保持でき、ラベリング追尾処理においては被写体の大きさが小さい場合でも精度よく追尾被写体位置を特定できる。
【0072】
(変形例1)
上述した実施の形態では、1つのマイコンがテンプレートマッチング追尾処理およびラベリング追尾処理を非同期で演算する場合について説明したが、テンプレートマッチング追尾処理をM回行う間にラベリング追尾処理をN回行うようにするなど、これらの処理を同期で演算するようにしてもよい。
【0073】
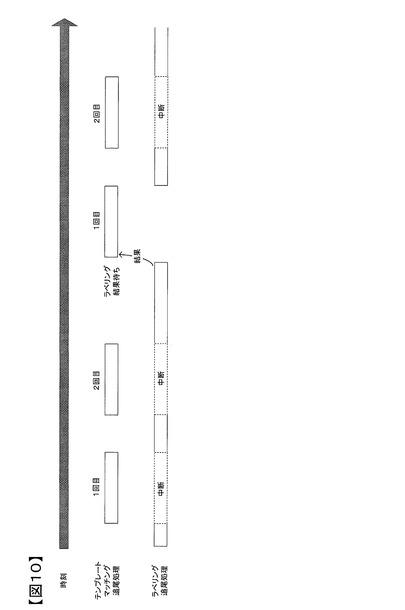
図10は、変形例1によるテンプレートマッチング追尾処理とラベリング追尾処理の実行タイミングを説明する図である。図10では、テンプレートマッチング追尾処理を2回実行する間に、ラベリング追尾処理を1回実行するように構成した場合を示している。この場合のテンプレートマッチング追尾部12は、テンプレートマッチング追尾処理を2回分演算したときに、ラベリング追尾処理の1回分の演算が終わっていない場合、次のテンプレートマッチング追尾処理を開始せず、ラベリング追尾処理の結果が出るまで待機する。
【0074】
(変形例2)
上述した実施の形態では、1つのマイコンでテンプレートマッチング追尾処理およびラベリング追尾処理を演算する場合について説明したが、2つのマイコンを設け、それぞれの処理を独立して実行するようにしてもよい。
【0075】
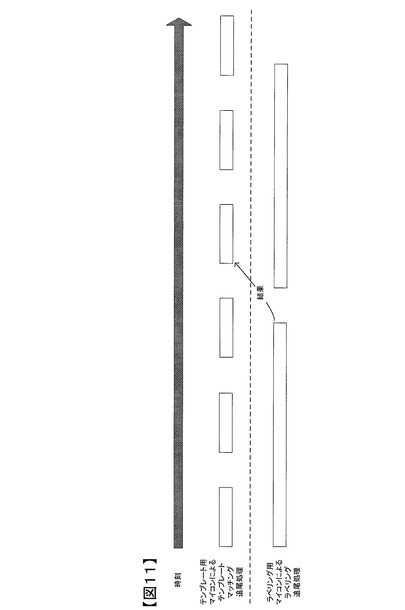
図11は、変形例2によるテンプレートマッチング追尾処理とラベリング追尾処理の実行タイミングを説明する図である。例えば、テンプレートマッチング用マイコンが、所定時間間隔ごとに繰り返しテンプレートマッチング追尾処理を行う。ラベリング用マイコンは、テンプレートマッチング追尾処理の実行タイミングによらず、独立して繰り返しラベリング追尾処理を行う。なお、図11では、テンプレートマッチング追尾処理およびラベリング追尾処理を非同期で演算する場合を示したが、テンプレートマッチング追尾処理をM回行う間にラベリング追尾処理をN回行うようにするなど、これらの処理を同期で演算するようにしてもよい。
【0076】
(変形例3)
上述した実施の形態では、シャッターボタンが半押しされている間、テンプレートマッチング追尾処理およびラベリング追尾処理を実行する場合について説明した。これに限らず、連写撮影などの演算負荷が重い処理を実行している際には、ラベリング追尾処理を停止し、テンプレートマッチング追尾処理のみを実行するようにしてもよい。こうすることにより、演算負荷が重い処理を実行している際にも、被写体追尾のリアルタイム性を保持できる。
【0077】
(変形例4)
上述した実施の形態では、シャッターボタンが半押しされると、テンプレートマッチング追尾処理およびラベリング追尾処理を開始する場合について説明した。これに限らず、半押し開始時にはテンプレートマッチング追尾処理のみを開始し、テンプレートマッチング追尾処理の信頼度が低くなってきたと判定した場合にラベリング追尾処理を開始するようにしてもよい。この場合、上記カウント値が所定の判定閾値以上となった場合に、信頼度が低いと判定する。
【0078】
またテンプレート画像との類似度が低くなってきたと判定した場合にラベリング追尾処理を開始するようにしてもよい。この場合、上記最小差分値が所定の判定閾値以上となった場合に、類似度が低いと判定する。
【0079】
このように構成することにより、被写体追尾処理全体の処理負荷を軽減して高速演算を行うことができ、さらに追従性を向上することができる。
【0080】
(変形例5)
上述した実施の形態では、第1ブロック化画像を用いてテンプレートマッチング追尾処理を行い、第2ブロック化画像を用いてラベリング追尾処理を行う場合について説明した。これに限らず、テンプレートマッチング追尾処理においては第1撮像素子9からの入力画像をブロック化して用いるようにし、ラベリング追尾処理においては第1撮像素子9からの入力画像をブロック化せずに用いるようにしてもよい。こうすることでも、テンプレートマッチング追尾処理においては演算負荷を軽くしてリアルタイム性を保持でき、ラベリング追尾処理においては被写体の大きさが小さい場合でも精度よく追尾被写体位置を特定できる。
【0081】
またこれに限らず、画像処理能力が高性能である場合や、追尾被写体が小さく且つ大きな移動はないと判定したため高速演算が不要である場合など、高画素数であっても対応できる場合には、テンプレートマッチング追尾処理およびラベリング追尾処理の双方において、第1撮像素子9からの入力画像をブロック化せずに用いるようにしてもよい。
【0082】
(変形例6)
上述した実施の形態では、テンプレートマッチングによる追尾被写体位置TMとラベリングによる追尾被写体位置Lbとの距離が判定閾値Th未満である場合には、テンプレートマッチングによる追尾被写体位置TMを用いて次回のテンプレート探索範囲を設定するようにした。これに限らず、上記距離が判定閾値Th未満である場合に、ラベリングによる追尾被写体位置Lbを用いて次回のテンプレート探索範囲を設定するようにしてもよい。
【0083】
(変形例7)
上述した実施の形態では、ステップS105からステップS108の判定を経てステップS110へ進む場合に、ラベリングによる被写体追尾位置Lbを用いて次回のテンプレート探索範囲を設定するようにした。これに限らず、例えば、ステップS105で肯定判定を得た(すなわちテンプレートマッチングによる追尾被写体位置TMと、ラベリングによる追尾被写体位置Lbとの距離が判定閾値Th以上である)場合には、ステップS106〜108の判定を省略して、ステップS110へ進むようにしてもよい。また、ステップS106〜108の判定のうち、いずれか1つまたは2つを省略するようにしてもよい。
【0084】
(変形例8)
上述した実施の形態では、テンプレートマッチング追尾処理およびラベリング追尾処理を実行する場合について説明したが、この他の被写体追尾処理を実行するようにしてもよい。
【0085】
具体的には、2つの被写体追尾処理(第1の被写体追尾処理および第2の被写体追尾処理)を実行するデジタルカメラにおいて、第1の被写体追尾処理が第2の被写体追尾処理よりも高速の処理であり、第2の被写体追尾処理が第1の被写体追尾処理よりも高精度の処理であるように構成する。そして、第1の被写体追尾処理により特定した追尾被写体位置と、第2の被写体追尾処理により特定した追尾被写体位置との距離が所定値未満である場合には、第1の被写体追尾処理または第2の被写体追尾処理により特定した追尾被写体位置を用いて次回の第1の被写体追尾処理による探索範囲を設定する。一方、上記距離が所定値以上である場合には、第2の被写体追尾処理により特定した追尾被写体位置を用いて次回の第1の被写体追尾処理による探索範囲を設定する。こうすることにより、上述した実施の形態と同様に、高速の処理である第1の被写体追尾処理を用いてリアルタイムに被写体を追尾できると共に、高精度の処理である第2の被写体追尾処理を用いて第1の被写体追尾処理の追尾性能を向上できる。
【0086】
なお、第1または第2の被写体追尾処理としては、上記テンプレートマッチング追尾処理およびラベリング追尾処理以外にも、例えば、背景差分法を用いた被写体追尾処理など種々の被写体追尾処理を用いることができる。
【0087】
(変形例9)
上述した実施の形態では、本発明をデジタルカメラに適用する場合について説明した。しかしながら、本発明は、動画データを読み込んで、動画中の被写体をフレーム間で追尾するための被写体追尾装置として、たとえばパソコンや携帯端末などに適用することも可能である。
【0088】
以上の説明はあくまで一例であり、上記の実施形態の構成に何ら限定されるものではない。
【符号の説明】
【0089】
1…撮影レンズ
9…第1撮像素子
10…制御部
11…第1ブロック化部
12…テンプレートマッチング追尾部
13…第2ブロック化部
14…ラベリング追尾部
15…AF機能実行部
【技術分野】
【0001】
本発明は、被写体追尾装置およびカメラに関する。
【背景技術】
【0002】
背景差分法と、動的2値化法と、テンプレートマッチング法とを用いて移動物体を検出する物体検出認識方法が知られている(特許文献1参照)。この方法では、背景差分法および動的2値化法により検出された物体の画像パターンをテンプレートとし、入力画像に対してこのテンプレートを用いてテンプレートマッチング処理を行うことにより、物体の位置を検出する。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2002−157599号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来技術では、テンプレートマッチング処理において被写体の位置を誤認識して、被写体の位置が探索範囲から外れてしまうと、被写体を正確に追尾できなくなるという問題があった。
【課題を解決するための手段】
【0005】
請求項1に記載の発明による被写体追尾装置は、入力画像内に第1の探索範囲を設定し、第1の探索範囲内の画像に対して、追尾被写体の基準となるテンプレート画像を基にテンプレートマッチング処理を行い、処理結果に基づいて追尾被写体位置を特定する第1の追尾手段と、入力画像内に第2の探索範囲を設定し、第2の探索範囲内の画像に対して、追尾被写体の基準となる輝度情報または色情報に基づいて設定された基準値を用いて2値化処理およびラベリング処理を行い、処理結果に基づいて追尾被写体位置を特定する第2の追尾手段と、を備え、第1の追尾手段は、第1の追尾手段が特定した追尾被写体位置と、第2の追尾手段が特定した追尾被写体位置との距離が所定値未満である場合には、第1の追尾手段または第2の追尾手段が特定した追尾被写体位置を用いて次回の第1の探索範囲を設定し、第1の追尾手段が特定した追尾被写体位置と、第2の追尾手段が特定した追尾被写体位置との距離が所定値以上である場合には、第2の追尾手段が特定した追尾被写体位置を用いて次回の第1の探索範囲を設定することを特徴とする。
請求項7に記載の発明による被写体追尾装置は、入力画像内に第1の探索範囲を設定し、第1の探索範囲内の画像に対して第1の被写体追尾処理を行い、処理結果に基づいて追尾被写体位置を特定する第1の追尾手段と、入力画像内に第2の探索範囲を設定し、第2の探索範囲内の画像に対して、第2の被写体追尾処理を行い、処理結果に基づいて追尾被写体位置を特定する第2の追尾手段と、を備え、第1の被写体追尾処理は、第2の被写体追尾処理よりも高速の処理であり、第2の被写体追尾処理は、第1の被写体追尾処理よりも高精度の処理であり、第1の追尾手段は、第1の追尾手段が特定した追尾被写体位置と、第2の追尾手段が特定した追尾被写体位置との距離が所定値未満である場合には、第1の追尾手段または第2の追尾手段が特定した追尾被写体位置を用いて次回の第1の探索範囲を設定し、第1の追尾手段が特定した追尾被写体位置と、第2の追尾手段が特定した追尾被写体位置との距離が所定値以上である場合には、第2の追尾手段が特定した追尾被写体位置を用いて次回の第1の探索範囲を設定することを特徴とする。
請求項8に記載の発明によるカメラは、請求項1〜7のいずれか一項に記載の被写体追尾装置を備えることを特徴とする。
【発明の効果】
【0006】
本発明によれば、被写体を正確に追尾できる。
【図面の簡単な説明】
【0007】
【図1】本発明の一実施の形態による被写体追尾装置を搭載したデジタルカメラの構成を説明する図である。
【図2】デジタルカメラの概略的な動作の流れを示すフローチャートである。
【図3】テンプレートマッチング追尾処理とラベリング追尾処理の実行タイミングを説明する図である。
【図4】ラベリング追尾処理の流れを示すフローチャートである。
【図5】ラベリング追尾処理を説明する図である。
【図6】テンプレートマッチング追尾処理の流れを示すフローチャートである。
【図7】テンプレートマッチング追尾処理を説明する図である。
【図8】テンプレートマッチング追尾処理を説明する図である。
【図9】テンプレートマッチング追尾処理を説明する図である。
【図10】変形例1によるテンプレートマッチング追尾処理とラベリング追尾処理の実行タイミングを説明する図である。
【図11】変形例2によるテンプレートマッチング追尾処理とラベリング追尾処理の実行タイミングを説明する図である。
【発明を実施するための形態】
【0008】
以下、図面を参照して本発明を実施するための形態について説明する。図1は、本発明の一実施の形態による被写体追尾装置を搭載したデジタルカメラの概略的な構成を示す側面図である。
【0009】
撮影レンズ1および絞り2を介して入射した撮影光束は、図1に例示するミラーダウン状態にある一部半透過のクイックリターンミラー3によって上方へ折り曲げられ、焦点板4へ導かれる。焦点板4へ入射された撮影光束は、撮影レンズ1によって焦点板4の拡散面に結像する。焦点板4で拡散された撮影光束は、ペンタプリズム6へ入射される。ペンタプリズム6は、拡散された被写体光を接眼レンズ7へ導く。ユーザは、不図示の接眼部から接眼レンズ7を通して被写体像を観察可能である。
【0010】
また、焦点板4で拡散された撮影光束の一部は、測光レンズ8を介して第1撮像素子9の受光面に再結像する。第1撮像素子9は、撮影光束を受光して、測光用の画像信号を出力する。この画像信号は、不図示の画像処理回路を介して第1ブロック化部11および第2ブロック化部13に入力される。
【0011】
また、クイックリターンミラー3を透過した一部の撮影光束は、サブミラー17によって下方へ折り曲げられ、位相差検出方式の焦点検出部16へ導かれる。焦点検出部16は、撮影光束を受光して得られる受光信号に基づいて撮影レンズ1のデフォーカス量を求める。なお、焦点検出部16は、撮影画面内の複数位置を測距点とし、各測距点に関するデフォーカス量を検出可能となっている。
【0012】
第1ブロック化部11は、第1撮像素子9で得られた画像信号を所定数のブロックに分割し、ブロックごとに画像情報(色情報や輝度情報など)を平均化することにより、第1ブロック化画像を生成する。なお、以下の説明では、第1ブロック化画像における1つのブロックを、第1ブロック化画像における1つの画素として説明する。第1ブロック化部11は、生成した第1ブロック化画像をテンプレートマッチング追尾部12へ出力する。
【0013】
テンプレートマッチング追尾部12は、第1ブロック化部11から入力された第1ブロック化画像を用いてテンプレートマッチング追尾処理を行う。テンプレートマッチング追尾処理は、公知のテンプレートマッチング処理を行うことにより、撮影画像内における追尾対象の被写体(追尾被写体)の位置を特定する処理である(詳しくは後述する)。テンプレートマッチング追尾部12は、特定した追尾被写体の位置をAF機能実行部15へ出力する。
【0014】
第2ブロック化部13は、第1撮像素子9で得られた画像信号を、第1ブロック化部11で分割するブロック数よりも多いブロック数で分割し、ブロックごとに画像情報(色情報や輝度情報など)を平均化することにより、第2ブロック化画像を生成する。なお、以下の説明では、第2ブロック化画像における1つのブロックを、第2ブロック化画像における1つの画素として説明する。第2ブロック化部13は、生成した第2ブロック化画像をラベリング追尾部14へ出力する。
【0015】
ラベリング追尾部14は、第2ブロック化部13から入力された第2ブロック化画像を用いてラベリング追尾処理を行う。ラベリング追尾処理は、公知の2値化処理およびラベリング処理を行うことにより、撮影画像内における追尾被写体の位置を特定する処理である(詳しくは後述する)。ラベリング追尾部14は、特定した追尾被写体の位置をテンプレートマッチング追尾部12へ出力する。テンプレートマッチング追尾部12は、ラベリング追尾部14から出力された追尾被写体の位置を、テンプレートマッチング追尾処理に反映するよう構成されている(詳しくは後述する)。
【0016】
AF機能実行部15は、テンプレートマッチング追尾部12から出力された追尾被写体の位置に基づいて焦点検出部16の測距点(AFエリア)を選択し、選択した測距点に関するデフォーカス量を焦点検出部16から取得する。AF機能実行部15は、取得したデフォーカス量を基にレンズ駆動量を演算し、信号接点18を介してレンズ側マイコン19へ出力する。レンズ側マイコン19は、AF機能実行部15からのレンズ駆動量を基にレンズ駆動部20に駆動信号を送り、撮影レンズ1を駆動させる。この結果、追尾被写体の位置に焦点が調節される。
【0017】
制御部10は、第1撮像素子9、第1ブロック化部11、テンプレートマッチング追尾部12、第2ブロック化部13、ラベリング追尾部14、AF機能実行部15、および焦点検出部16などのデジタルカメラの各機能の動作を制御する。
【0018】
また、デジタルカメラにはユーザが操作する操作部材(不図示)が配置される。操作部材は、ユーザにより操作されると、各操作に応じた操作信号を制御部10へ送出する。操作部材には、シャッターボタンの半押し時にオンする半押しスイッチ、シャッターボタンの全押し時オンする全押しスイッチ、AFエリアの移動を行うためのエリア移動スイッチなどが含まれる。ユーザは、例えば、エリア移動スイッチを操作することにより、所望のAFエリアを選択することができる。AFエリア表示部5は、焦点板4上の被写体像にAFエリアを重畳表示する。
【0019】
シャッターレリーズ後は、クイックリターンミラー3が上方へ回動し、全ての撮影光束はシャッター制御部21の制御のもと開駆動されるシャッター22を介して第2撮像素子23へ導かれ、その撮像面上に被写体像を結像する。第2撮像素子23は、被写体像を撮像して、撮影用の画像信号を出力する。撮像が終了するとシャッター22が閉駆動され、クイックリターンミラー3がミラーダウン状態へ戻る。
【0020】
図2は、本実施形態によるデジタルカメラの概略的な動作を示すフローチャートである。制御部10は、デジタルカメラの電源がオンされると、図2に例示する処理を起動する。ステップS001において制御部10は、第1撮像素子9を制御して画像信号を取得させ、ステップS002へ進む。
【0021】
ステップS002において制御部10は、追尾動作を行う。すなわち、テンプレートマッチング追尾部12およびラベリング追尾部14を制御して、第1撮像素子9からの画像信号を基に、テンプレートマッチング追尾処理およびラベリング追尾処理を行わせ、ステップS003へ進む。
【0022】
ステップS003において制御部10は、AF動作を行う。すなわち、AF機能実行部15および焦点検出部16を制御して、ステップS002のテンプレートマッチング追尾処理の結果を基に測距点を選択させ、選択した測距点に関するデフォーカス量を演算させる。そして、このデフォーカス量に基づいてレンズ駆動量を演算させ、レンズ側マイコン19に出力させる。この結果、撮影レンズ1が駆動させ、追尾被写体の位置に焦点が調節される。制御部10は、上記ステップS001からステップS003までの処理を繰り返し行うことにより、デジタルカメラ全体として被写体を追尾してオートフォーカスを行うことができる。
【0023】
なお、制御部10は、上記テンプレートマッチング追尾処理およびラベリング追尾処理を並列的に行わせる。図3は、テンプレートマッチング追尾処理およびラベリング追尾処理の実行タイミングを説明する図である。図3の白帯は、処理の実行中であることを示す。テンプレートマッチング追尾部12およびラベリング追尾部14は、1つのマイコンで構成される。この1つのマイコンが、テンプレートマッチング追尾処理およびラベリング追尾処理を非同期で実行する。
【0024】
具体的に、テンプレートマッチング追尾部12は、所定時間間隔ごとに繰り返しテンプレートマッチング追尾処理を実行する。ラベリング追尾部14も繰り返しラベリング追尾処理を実行するが、テンプレートマッチング追尾部12が演算を行っていない間にラベリング追尾処理を実行する。したがって、ラベリング追尾処理の実行中に、テンプレートマッチング追尾処理が開始される際にはラベリング追尾処理を一時中断し、テンプレートマッチング追尾処理が終了するとラベリング追尾処理を再開する。
【0025】
このようにテンプレートマッチング追尾処理をラベリング追尾処理よりも優先するのは、以下の理由による。テンプレートマッチング処理は、ラベリング処理よりも演算負荷が軽く演算速度が速い。また、上述したように、テンプレートマッチング追尾処理で用いる第1ブロック化画像は、ラベリング追尾処理で用いる第2ブロック化画像よりも画素数(ブロック数)が少ない。したがってテンプレートマッチング追尾処理の処理時間をラベリング追尾処理の処理時間よりも短くできるため、テンプレートマッチング追尾処理では、追尾被写体位置をリアルタイムに特定することができる。ゆえにテンプレートマッチング追尾処理を優先して、リアルタイム性を保持させている。
【0026】
一方、ラベリング処理は、テンプレートマッチング処理よりも演算速度が遅く処理時間が長くなるが、テンプレートマッチング処理よりも被写体形状の変化などに強い。またラベリング追尾処理では、画素数(ブロック数)の多い第2ブロック化画像を用いる。したがって、ラベリング追尾処理は、テンプレートマッチング追尾処理よりも追尾被写体位置を精度よく特定できる。そこで、本実施形態では、テンプレートマッチング追尾処理が行われていない間にラベリング追尾処理を行い、ラベリング追尾処理の結果をテンプレートマッチング追尾処理に反映させることで、テンプレートマッチング追尾処理の精度を向上するようになっている(詳しくは後述する)。
【0027】
図4は、ラベリング追尾部14が行うラベリング追尾処理を示すフローチャートである。ステップS200においてラベリング追尾部14は、シャッターボタンが半押し状態か否かを判定する。シャッターボタンが半押し状態である場合には、ラベリング追尾部14は、ステップS200を肯定判定し、ステップS201へ進む。一方、シャッターボタンが半押し状態ではない場合には、ラベリング追尾部14は、ステップS200を否定判定して図4の処理を終了し、図2のステップS002へ戻る。
【0028】
ステップS201においてラベリング追尾部14は、ラベリング追尾処理が2回目以降であるか否かを判定する。ここで、ラベリング追尾処理の回数は、シャッターボタンが半押しされた後、最初に行ったラベリング追尾処理を1回目として数える。なお、シャッターボタンの半押し操作が解除された場合は、この回数をリセットする。ラベリング追尾処理が2回目以降である場合には、ラベリング追尾部14は、ステップS201を肯定判定してステップS203へ進む。一方、ラベリング追尾処理が2回目以降ではない(すなわち1回目である)場合には、ラベリング追尾部14は、ステップS201を否定判定してステップS202へ進む。
【0029】
ステップS202においてラベリング追尾部14は、ラベリング追尾処理における初期化処理を行う。この初期化処理では、追尾被写体情報の初期化と各変数の初期化とを行う。まず、追尾被写体情報の初期化について説明する。ラベリング追尾部14は、第2ブロック化部13から入力された第2ブロック化画像において、ユーザにより選択されたAFエリアに対応する画素(例えばAFエリアを含む画素、以下AFエリア画素と呼ぶ)の画像情報(色情報または輝度情報)を、仮の追尾被写体情報として設定する。一般的に、ユーザは、ユーザ自身で選択したAFエリアに撮影したい被写体が入るようにデジタルカメラを構えるからである。
【0030】
次にラベリング追尾部14は、図5(A)に示すように、第2ブロック化部13から入力される第2ブロック化画像において、上記AFエリア画素a0の位置を中心とした所定サイズの探索範囲c0を設定し、この探索範囲c0内の画像に対して2値化処理を行う。なお、ラベリング追尾処理において設定する探索範囲を、以下ラベリング探索範囲と呼ぶ。この2値化処理では、上記仮の追尾被写体情報を基に閾値を設定し、この閾値を用いて2値化を行うことにより、上記仮の追尾被写体情報と類似する色情報または輝度情報を有する画素を抽出する。
【0031】
そしてラベリング追尾部14は、公知のラベリング処理により、上記2値化処理で抽出された画素の連続している部分をグループ化する。ラベリング追尾部14は、ラベリングにより生成した複数のグループの中から、上記AFエリア画素a0を含むグループb0を追尾被写体領域として推定する。ラベリング追尾部14は、追尾被写体領域として推定したグループb0に含まれる画素の色情報または輝度情報の平均値を算出し、算出結果を追尾被写体情報として設定する。
【0032】
なお、上記2値化処理およびラベリング処理では、AFエリア画素a0の色情報または輝度情報と類似する色情報または輝度情報を有する画素の領域を抽出してグループ化するようにしたが、周辺領域(例えばAFエリアの周囲の領域)の色情報または輝度情報と異なる色情報または輝度情報を有する画素の領域を抽出してグループ化するようにしてもよい。
【0033】
次に各変数の初期化について説明する。ラベリング追尾処理における変数としては、追尾被写体位置、演算時刻および追尾被写体の大きさ情報が設けられている。各変数の初期化では、AFエリア画素a0の位置を追尾被写体位置とし、シャッターボタンの半押し開始時刻を演算時刻とし、追尾被写体領域として推定したグループb0の連結画素数を追尾被写体の大きさ情報とする。
【0034】
以上のように追尾被写体情報の初期化と各変数の初期化とを行うと、ラベリング追尾部14は、初期化した追尾被写体情報と各変数(追尾被写体位置、演算時刻、追尾被写体の大きさ情報)を、不図示のメモリに記録する。その後、ラベリング追尾部14は、図4の処理を終了し、図2のステップS002に戻る。
【0035】
一方、ラベリング追尾処理が2回目以降である場合にステップS201を肯定判定して進むステップS203において、ラベリング追尾部14は、前回(1回目を含む)のラベリング追尾処理の際に記録した追尾被写体位置a0をメモリから読み出す。そしてラベリング追尾部14は、図5(B)に示すように、第2ブロック化部13から入力された第2ブロック化画像において、前回の追尾被写体位置a0を中心とする所定サイズの範囲を今回のラベリング探索範囲c1として設定し、ステップS204へ進む。
【0036】
ステップS204においてラベリング追尾部14は、ステップS203で設定したラベリング探索範囲c1内の画像に対して2値化処理を行う。この2値化処理では、初期化処理(ステップS202)で設定した追尾被写体情報を基に閾値を設定し、この閾値を用いて2値化を行うことにより、上記追尾被写体情報と類似する色情報または輝度情報を有する画素を抽出する。
【0037】
ラベリング追尾部14は、公知のラベリング処理により、上記2値化処理で抽出された画素の連続している部分をグループ化する。ラベリング追尾部14は、ラベリング処理により生成した複数のグループの中から、例えば前回の追尾被写体位置a0に最も近い位置にあるグループb1を、追尾被写体領域として推定する。なお、連結画素数が前回の追尾被写体の大きさ情報に最も近いグループb1を追尾被写体領域として推定するようにしてもよい。ラベリング追尾部14は、追尾被写体領域として推定したグループb1の重心位置を、今回の追尾被写体位置a1として特定する。
【0038】
また、ラベリング追尾部14は、追尾被写体領域として推定したグループb1の連結画素数を今回の追尾被写体の大きさ情報とし、今回のラベリング追尾処理における演算開始時刻(ステップS201の半押し判定を開始した時刻)を今回の演算時刻とする。このようにしてラベリング追尾部14は、2値化処理およびラベリング処理により追尾被写体位置を特定すると、ステップS205へ進む。ステップS205において、ラベリング追尾部14は、ステップS204で更新した各変数(追尾被写体位置、追尾被写体の大きさ情報、演算時刻)を不図示のメモリに記録する。これらの情報は、ラベリング追尾処理を行うたびに毎回記録されるので、時系列的に複数記録される。
【0039】
このようにラベリング追尾処理では、前回の追尾被写体位置を用いて今回のラベリング探索範囲を決定する。そして、今回のラベリング探索範囲内の画像に対して2値化処理およびラベリング処理を行うことにより、今回の追尾被写体領域(ラベリング処理によるグループ)、および追尾被写体位置を特定することができる。
【0040】
図6は、テンプレートマッチング追尾部12が行うテンプレートマッチング追尾処理を示すフローチャートである。ステップS100においてテンプレートマッチング追尾部12は、シャッターボタンが半押し状態か否かを判定する。シャッターボタンが半押し状態である場合には、テンプレートマッチング追尾部12は、ステップS100を肯定判定し、ステップS101へ進む。一方、シャッターボタンが半押し状態ではない場合には、テンプレートマッチング追尾部12は、ステップS100を否定判定して図6の処理を終了し、図2のステップS002へ戻る。
【0041】
ステップS101においてテンプレートマッチング追尾部12は、テンプレートマッチング追尾処理が2回目以降であるか否かを判定する。ここで、テンプレートマッチング追尾処理の回数は、シャッターボタンが半押しされた後、最初に行ったテンプレートマッチング追尾処理を1回目として数える。なお、シャッターボタンの半押し操作が解除された場合は、この回数をリセットする。テンプレートマッチング追尾処理が2回目以降である場合には、テンプレートマッチング追尾部12は、ステップS101を肯定判定してステップS103へ進む。一方、テンプレートマッチング追尾処理が2回目以降ではない(すなわち1回目である)場合には、テンプレートマッチング追尾部12は、ステップS101を否定判定してステップS102へ進む。
【0042】
ステップS102においてテンプレートマッチング追尾部12は、テンプレートマッチング追尾処理における初期化処理を行う。この初期化処理では、第1ブロック化部11から入力された第1ブロック化画像において、図7(A)に示すように、ユーザにより選択されたAFエリアに対応する位置(例えばAFエリアの中心位置、以下AEエリア位置と呼ぶ)d0を中心とした所定サイズの範囲e0をテンプレート画像として設定する。
【0043】
またテンプレートマッチング追尾部12は、上記AFエリア位置d0を中心とした所定サイズの探索範囲を、次回のテンプレートマッチング追尾処理における探索範囲f1として設定する。なお、テンプレートマッチング追尾処理において設定する探索範囲を、以下テンプレート探索範囲と呼ぶ。その後、テンプレートマッチング追尾部12は、図6の処理を終了し、図2のステップS002に戻る。
【0044】
一方、テンプレートマッチング追尾処理が2回目以降である場合にステップS101を肯定判定して進むステップS103において、テンプレートマッチング追尾部12は、図7(B)に示すように、第1ブロック化部11から入力された第1ブロック化画像から、前回(1回目を含む)のテンプレートマッチング追尾処理において設定したテンプレート探索範囲(すなわち今回のテンプレート探索範囲)f1内の画像を切り出す。
【0045】
テンプレートマッチング追尾部12は、切り出した画像に対して、初期化処理(ステップS102)で設定したテンプレート画像を用いて公知のテンプレートマッチング処理を行う。具体的には、テンプレート探索範囲f1内の画像に対してテンプレート画像を1画素ずつ動かしながら、これらの画像の画像情報(色情報または輝度情報など)の差分演算を行い、テンプレート探索範囲f1内の画像においてテンプレート画像との差分値が最も小さい領域e1を追尾被写体領域として推定する。そして、追尾被写体領域e1の中心位置を、追尾被写体位置d1として特定する。
【0046】
なお、追尾被写体領域e1における上記差分値、すなわち最小差分値は、追尾被写体領域e1の画像とテンプレート画像との類似度を示す値である。この最小差分値が小さいほど、追尾被写体領域e1の画像とテンプレート画像との類似度が高く、追尾被写体領域e1の画像が追尾被写体に類似していると判断できる。
【0047】
また、テンプレートマッチング追尾部12は、テンプレート探索範囲f1内において、テンプレート画像との差分値が上記最小差分値に近い(すなわち上記最小差分値との差分が所定の判定閾値以下である)領域をカウントする。このカウント値は、上記特定した追尾被写体位置d1の信頼度を示す値である。カウント値が小さいほど、追尾被写体領域e1以外ではテンプレート画像と類似する領域が少ないため、追尾被写体領域e1が追尾被写体を正確に捉えている可能性が高く、追尾被写体位置d1の信頼度が高いと判断できる。
【0048】
このようにテンプレートマッチング処理を用いて追尾被写体位置d1を特定すると、テンプレートマッチング追尾部12は、ステップS104へ進む。ステップS104においてテンプレートマッチング追尾部12は、上記最小差分値(テンプレート画像との類似度を示す値)、上記カウント値(追尾被写体位置の信頼度を示す値)、および今回のテンプレートマッチング追尾処理における演算開始時刻(ステップS101の半押し判定を開始した時刻)をメモリに記録する。なお、これらの情報は、テンプレートマッチング追尾処理を行うたびに毎回記録されるので、時系列的に複数記録される。その後、テンプレートマッチング追尾部12は、ステップS105へ進む。
【0049】
ステップS105においてテンプレートマッチング追尾部12は、最新のラベリング追尾処理により特定された追尾被写体位置Lbをメモリから読み出す。そして、ステップS104で特定した(すなわちテンプレートマッチングによる)追尾被写体位置TMと、ラベリングによる追尾被写体位置Lbとの距離を算出し、これらの距離が所定の判定閾値Th以上であるか否かを判定する。
【0050】
上記距離が判定閾値Th以上であることは、テンプレートマッチング追尾処理の結果とラベリング追尾処理の結果とが異なることを意味する。この場合、これらの処理のいずれかが誤認識である可能性がある。上述したように、通常、テンプレートマッチング追尾処理よりもラベリング追尾処理の方が追尾精度が高いため、特にテンプレートマッチング処理において追尾被写体位置TMを誤認識している可能性が高い。この場合のテンプレートマッチング追尾部12は、ステップS105を肯定判定してステップS106へ進む。
【0051】
一方、上記距離が判定閾値Th未満であることは、テンプレートマッチング追尾処理の結果とラベリング追尾処理の結果とがほぼ同一であることを意味する。この場合には、テンプレートマッチングによる追尾被写体位置TMおよびラベリングによる追尾被写体位置Lbの双方が正確である可能性が高い。この場合のテンプレートマッチング追尾部12は、ステップS105を否定判定してステップS109へ進む。ステップS109において、テンプレートマッチング追尾部12は、図7(B)に示すように、テンプレートマッチングによる追尾被写体位置d1を中心とした所定サイズの範囲を、次回のテンプレート探索範囲f2として設定して、図6の処理を終了する。
【0052】
ステップS105を肯定判定して進むステップS106において、テンプレートマッチング追尾部12は、テンプレートマッチングによる追尾被写体位置TMの演算時刻TMtと、ラベリングによる追尾被写体位置Lbの演算時刻Lbtとの差分を算出し、この差分の絶対値が所定の判定閾値Tht未満であるか否かを判定する。
【0053】
上述したように、テンプレートマッチング追尾処理とラベリング追尾処理とは、それぞれ処理にかかる時間が異なるため、処理結果が得られる時間が異なる。ラベリングによる追尾被写体位置Lbの演算時刻Lbtがテンプレートマッチングによる追尾被写体位置TMの演算時刻TMtから離れ過ぎている場合、ラベリング処理結果が古く現在の追尾被写体位置を捉えていない可能性が高い。そこで、テンプレートマッチング追尾部12は、上記差分の絶対値が判定閾値Tht以上である場合、ステップS106を否定判定して上述したステップS103へ進む。そして、テンプレートマッチングによる追尾被写体位置TMを用いて次回のテンプレート探索範囲f2を設定して、図6の処理を終了する。
【0054】
一方、上記差分の絶対値が判定閾値Tht未満である場合は、ラベリングによる追尾被写体位置Lbが現在の追尾被写体位置を捉えている可能性が高い。この場合のテンプレートマッチング追尾部12は、ステップS106を肯定判定してステップS107へ進む。
【0055】
ステップS107において、テンプレートマッチング追尾部12は、テンプレートマッチングによる追尾被写体位置TMの信頼度が高いか否かを判定する。具体的には、テンプレートマッチングによる追尾被写体位置TMの信頼度を示す値(上記カウント値)TMsが所定の判定閾値THs未満であるか否かを判定する。テンプレートマッチング追尾部12は、上記カウント値TMsが判定閾値THs未満である場合、テンプレートマッチングによる追尾被写体位置TMの信頼度が高いと判定する。この信頼度が高い場合には、ラベリングによる追尾被写体位置Lbよりもテンプレートマッチングによる追尾被写体位置TMの方が現在の追尾被写体位置を正確に捉えていることが推測される。そこで、この場合のテンプレートマッチング追尾部12は、ステップS107を肯定判定し、ステップS103へ進む。そして、テンプレートマッチングによる追尾被写体位置TMを用いて次回のテンプレート探索範囲f2を設定して、図6の処理を終了する。
【0056】
一方、テンプレートマッチング追尾部12は、上記カウント値TMsが判定閾値THs以上である場合、追尾被写体位置TMの信頼度が低いと判定してステップS107を否定判定し、ステップS108へ進む。
【0057】
なお、上記カウント値TMsが判定閾値THs未満であっても、上記最小差分値が大きい場合には、追尾被写体領域e1の画像とテンプレート画像との類似度が低く、追尾被写体位置TMが追尾被写体位置を捉えていない可能性が高い。そこで上記カウント値TMsが判定閾値THs未満であっても、上記最小差分値が所定の判定閾値以上である場合には、追尾被写体位置TMの信頼度が低いと判定してステップS107を否定判定し、ステップS108へ進むようにしてもよい。
【0058】
ステップS105からステップS107の判定を経てステップS108に達したことは、テンプレートマッチングによる追尾被写体位置TMが誤認識である可能性が高いことを意味する。例えば、図8(A)に示すように、テンプレート探索範囲h1内においてテンプレートマッチング処理を行って推定した追尾被写体領域g1が誤っていた場合、追尾被写体領域g1を基に特定する追尾被写体位置i1も誤った位置となる。図8(B)に示すように、誤った追尾被写体位置i1を中心とした所定サイズの範囲を次回のテンプレート探索範囲h2として設定した場合、追尾被写体がテンプレート探索範囲h2から外れてしまう。この場合、テンプレートマッチング処理を行っても、正確に追尾被写体位置を特定することができない。そこで、ステップS105からステップS107の判定を経てステップS108に達した場合には、以下に述べるとおり、テンプレートマッチングによる追尾被写体位置TMを用いずに次回のテンプレート探索範囲を設定する。
【0059】
ステップS108においてテンプレートマッチング追尾部12は、ラベリング追尾部14で推定した追尾被写体の大きさ情報の変化度合いを基にラベリングによる追尾被写体位置Lbの信頼度が高いか否かを判定する。具体的には、ラベリング追尾処理における最新(今回)の追尾被写体の大きさ情報S1および演算時刻t1と、前回の追尾被写体の大きさ情報S2および演算時刻t2と、前々回の追尾被写体の大きさ情報S3および演算時刻t3とをメモリから読み出す。そして、読み出したこれらの情報を、追尾被写体の大きさ情報Sを演算時刻tの2次関数で表した次式(1)に代入する。なお、次式(1)におけるa、b、cは係数である。
S=f(t)=at2+bt+c … (1)
【0060】
上記代入の結果、3元一次の連立方程式である次式(2)〜(4)を得る。
S1=a(t1)2+b(t1)+c … (2)
S2=a(t2)2+b(t2)+c … (3)
S3=a(t3)2+b(t3)+c … (4)
【0061】
そして、次式(5)を用いて、上記式(2)〜(4)をtの二次の係数aについて解くことにより、追尾被写体の大きさ情報の変化加速度aを算出する。
【数1】
【0062】
追尾被写体の大きさ情報の変化加速度aの絶対値が大きい場合、追尾被写体領域として推定したグループの大きさが急激に変化したことを意味する。実際上、追尾被写体がデジタルカメラに対して近づいたり遠ざかったりする場合には、撮影画像内において追尾被写体の大きさが徐々に変化することが多いが、追尾被写体の大きさが急激に変化する可能性は低い。したがって、追尾被写体領域と推定したグループの大きさが急激に変化した場合は、ラベリング追尾部14が誤認識した可能性が高い。
【0063】
そこで、テンプレートマッチング追尾部12は、上記変化加速度aが所定の判定閾値T未満である場合は、ラベリングによる追尾被写体位置Lbの信頼度が高いと判定してステップS108を肯定判定し、ステップS110へ進む。一方、テンプレートマッチング追尾部12は、上記変化加速度aが判定閾値T以上である場合は、ラベリングによる追尾被写体位置Lbの信頼度が低いと判定してステップS108を否定判定し、ステップS111へ進む。
【0064】
ステップS110へ進むことは、テンプレートマッチングによる追尾被写体位置TMは誤認識の可能性が高いが、ラベリングによる追尾被写体位置Lbは信頼できることを意味する。例えば、図9(A)に示すように、テンプレート探索範囲h1内においてテンプレートマッチング処理を行って推定した追尾被写体領域g1が誤認識であった場合、追尾被写体領域g1を基に特定する追尾被写体位置i1も誤った位置となる。しかしながら、ラベリング処理により推定した追尾被写体領域k1が正確であった場合、追尾被写体領域k1を基に特定する追尾被写体位置j1も正確な位置となる。そこで、図9(B)に示すように、この正確な追尾被写体位置j1を中心とした所定サイズの範囲を次回のテンプレート探索範囲h2として設定すれば、テンプレート探索範囲h2から追尾被写体が外れず、次回のテンプレートマッチング追尾処理において、追尾被写体領域g2および追尾被写体位置i2を正確に特定できる。
【0065】
そこでステップS110において、テンプレートマッチング追尾部12は、ラベリングによる追尾被写体位置Lbを中心とした所定サイズの範囲を次回のテンプレート探索範囲として設定する。その後、図6の処理を終了し、図2のステップS002に戻る。
【0066】
一方、ステップS111へ進むことは、テンプレートマッチングによる追尾被写体位置TMとラベリングによる追尾被写体位置Lbの双方が信頼できないことを意味する。そこでステップS111においてテンプレートマッチング追尾部12は、今回のテンプレート探索範囲と同様の範囲を、次回のテンプレート探索範囲として設定する。すなわち、テンプレート探索範囲を変更しない。その後、図6の処理を終了し、図2のステップS002に戻る。
【0067】
以上説明した実施形態によれば、次の作用効果が得られる。
(1)被写体追尾装置は、第1ブロック化画像内にテンプレート探索範囲を設定し、テンプレート探索範囲内の画像に対して、追尾被写体の基準となるテンプレート画像を基にテンプレートマッチング処理を行い、当該処理結果に基づいて追尾被写体位置TMを特定するテンプレートマッチング追尾部12と、第2ブロック化画像内にラベリング探索範囲を設定し、ラベリング探索範囲内の画像に対して、追尾被写体の基準となる輝度情報または色情報(追尾被写体情報)に基づいて設定された基準値(閾値)を用いて2値化処理およびラベリング処理を行い、当該処理結果に基づいて追尾被写体位置Lbを特定するラベリング追尾部14と、を備え、テンプレートマッチング追尾部12は、テンプレートマッチング追尾部12が特定した追尾被写体位置TMと、ラベリング追尾部14が特定した追尾被写体位置Lbとの距離が所定の判定閾値Th未満である場合には、テンプレートマッチング追尾部12が特定した追尾被写体位置TMを用いて次回のテンプレート探索範囲を設定し、テンプレートマッチング追尾部12が特定した追尾被写体位置TMと、ラベリング追尾部14が特定した追尾被写体位置Lbとの距離が所定の判定閾値Th以上である場合には、ラベリング追尾部14が特定した追尾被写体位置Lbを用いて次回のテンプレート探索範囲を設定するように構成したので、被写体を正確に追尾できる。例えば、被写体の形状が変化した場合やテンプレート画像に背景成分を含んだ場合にテンプレートマッチング追尾部12が追尾被写体位置TMを誤認識した場合に、ラベリング追尾部14が特定した追尾被写体位置Lbを用いて次回のテンプレート探索範囲を設定できるので、追尾被写体位置がテンプレート探索範囲から外れることなく、被写体の追尾を精度よく継続することができる。
【0068】
(2)上記(1)の被写体追尾装置において、テンプレートマッチング追尾部12は、テンプレートマッチング追尾部12が特定した追尾被写体位置TMと、ラベリング追尾部14が特定した追尾被写体位置Lbとの距離が所定の判定閾値Th以上であっても、ラベリング追尾部14が特定した追尾被写体位置TMの演算時刻がテンプレートマッチング追尾部12が特定した追尾被写体位置Lbの演算時刻から所定時間Tht以上離れている場合には、テンプレートマッチング追尾部12が特定した追尾被写体位置TMを用いて次回のテンプレート探索範囲を設定するように構成したので、古いラベリング追尾処理の結果を用いてしまうのを防止できる。
【0069】
(3)上記(1)または(2)の被写体追尾装置において、テンプレートマッチング追尾部12は、テンプレートマッチング追尾部12が特定した追尾被写体位置TMの信頼度を判定し、テンプレートマッチング追尾部12が特定した追尾被写体位置TMと、ラベリング追尾部14が特定した追尾被写体位置Lbとの距離が所定の判定閾値Th以上であっても、上記信頼度が高いと判定した場合には、テンプレートマッチング追尾部12が特定した追尾被写体位置TMを用いて次回のテンプレート探索範囲を設定するように構成したので、2つの被写体追尾処理のうち追尾被写体位置を正確に捉えている方の処理結果を用いて適切に次回のテンプレート探索範囲を設定できる。
【0070】
(4)上記(1)〜(3)の被写体追尾装置において、テンプレートマッチング追尾部12は、ラベリング追尾部14が特定した追尾被写体位置Lbの信頼度を判定し、テンプレートマッチング追尾部12が特定した追尾被写体位置TMと、ラベリング追尾部14が特定した追尾被写体位置Lbとの距離が所定の判定閾値Th以上であっても、上記信頼度が低いと判定した場合には、今回と同様のテンプレート探索範囲を次回のテンプレート探索範囲として設定するように構成したので、テンプレートマッチング追尾処理およびラベリング追尾処理の双方が誤認識した場合でも、追尾被写体がテンプレート探索範囲から外れるのを防止できる。
【0071】
(5)上記(1)〜(4)の被写体追尾装置において、入力画像(第1撮像素子9からの画像)を、第1の数のブロックに分割する第1ブロック化部11と、入力画像を、第1の数よりも多い第2の数のブロックに分割する第2ブロック化部13と、をさらに備え、テンプレートマッチング追尾部12は、第1の数のブロックに分割された入力画像を用いてテンプレートマッチング処理を行い、ラベリング追尾部14は、第2の数のブロックに分割された入力画像を用いて2値化処理およびラベリング処理を行うように構成したので、テンプレートマッチング追尾処理においては演算負荷を軽くしてリアルタイム性を保持でき、ラベリング追尾処理においては被写体の大きさが小さい場合でも精度よく追尾被写体位置を特定できる。
【0072】
(変形例1)
上述した実施の形態では、1つのマイコンがテンプレートマッチング追尾処理およびラベリング追尾処理を非同期で演算する場合について説明したが、テンプレートマッチング追尾処理をM回行う間にラベリング追尾処理をN回行うようにするなど、これらの処理を同期で演算するようにしてもよい。
【0073】
図10は、変形例1によるテンプレートマッチング追尾処理とラベリング追尾処理の実行タイミングを説明する図である。図10では、テンプレートマッチング追尾処理を2回実行する間に、ラベリング追尾処理を1回実行するように構成した場合を示している。この場合のテンプレートマッチング追尾部12は、テンプレートマッチング追尾処理を2回分演算したときに、ラベリング追尾処理の1回分の演算が終わっていない場合、次のテンプレートマッチング追尾処理を開始せず、ラベリング追尾処理の結果が出るまで待機する。
【0074】
(変形例2)
上述した実施の形態では、1つのマイコンでテンプレートマッチング追尾処理およびラベリング追尾処理を演算する場合について説明したが、2つのマイコンを設け、それぞれの処理を独立して実行するようにしてもよい。
【0075】
図11は、変形例2によるテンプレートマッチング追尾処理とラベリング追尾処理の実行タイミングを説明する図である。例えば、テンプレートマッチング用マイコンが、所定時間間隔ごとに繰り返しテンプレートマッチング追尾処理を行う。ラベリング用マイコンは、テンプレートマッチング追尾処理の実行タイミングによらず、独立して繰り返しラベリング追尾処理を行う。なお、図11では、テンプレートマッチング追尾処理およびラベリング追尾処理を非同期で演算する場合を示したが、テンプレートマッチング追尾処理をM回行う間にラベリング追尾処理をN回行うようにするなど、これらの処理を同期で演算するようにしてもよい。
【0076】
(変形例3)
上述した実施の形態では、シャッターボタンが半押しされている間、テンプレートマッチング追尾処理およびラベリング追尾処理を実行する場合について説明した。これに限らず、連写撮影などの演算負荷が重い処理を実行している際には、ラベリング追尾処理を停止し、テンプレートマッチング追尾処理のみを実行するようにしてもよい。こうすることにより、演算負荷が重い処理を実行している際にも、被写体追尾のリアルタイム性を保持できる。
【0077】
(変形例4)
上述した実施の形態では、シャッターボタンが半押しされると、テンプレートマッチング追尾処理およびラベリング追尾処理を開始する場合について説明した。これに限らず、半押し開始時にはテンプレートマッチング追尾処理のみを開始し、テンプレートマッチング追尾処理の信頼度が低くなってきたと判定した場合にラベリング追尾処理を開始するようにしてもよい。この場合、上記カウント値が所定の判定閾値以上となった場合に、信頼度が低いと判定する。
【0078】
またテンプレート画像との類似度が低くなってきたと判定した場合にラベリング追尾処理を開始するようにしてもよい。この場合、上記最小差分値が所定の判定閾値以上となった場合に、類似度が低いと判定する。
【0079】
このように構成することにより、被写体追尾処理全体の処理負荷を軽減して高速演算を行うことができ、さらに追従性を向上することができる。
【0080】
(変形例5)
上述した実施の形態では、第1ブロック化画像を用いてテンプレートマッチング追尾処理を行い、第2ブロック化画像を用いてラベリング追尾処理を行う場合について説明した。これに限らず、テンプレートマッチング追尾処理においては第1撮像素子9からの入力画像をブロック化して用いるようにし、ラベリング追尾処理においては第1撮像素子9からの入力画像をブロック化せずに用いるようにしてもよい。こうすることでも、テンプレートマッチング追尾処理においては演算負荷を軽くしてリアルタイム性を保持でき、ラベリング追尾処理においては被写体の大きさが小さい場合でも精度よく追尾被写体位置を特定できる。
【0081】
またこれに限らず、画像処理能力が高性能である場合や、追尾被写体が小さく且つ大きな移動はないと判定したため高速演算が不要である場合など、高画素数であっても対応できる場合には、テンプレートマッチング追尾処理およびラベリング追尾処理の双方において、第1撮像素子9からの入力画像をブロック化せずに用いるようにしてもよい。
【0082】
(変形例6)
上述した実施の形態では、テンプレートマッチングによる追尾被写体位置TMとラベリングによる追尾被写体位置Lbとの距離が判定閾値Th未満である場合には、テンプレートマッチングによる追尾被写体位置TMを用いて次回のテンプレート探索範囲を設定するようにした。これに限らず、上記距離が判定閾値Th未満である場合に、ラベリングによる追尾被写体位置Lbを用いて次回のテンプレート探索範囲を設定するようにしてもよい。
【0083】
(変形例7)
上述した実施の形態では、ステップS105からステップS108の判定を経てステップS110へ進む場合に、ラベリングによる被写体追尾位置Lbを用いて次回のテンプレート探索範囲を設定するようにした。これに限らず、例えば、ステップS105で肯定判定を得た(すなわちテンプレートマッチングによる追尾被写体位置TMと、ラベリングによる追尾被写体位置Lbとの距離が判定閾値Th以上である)場合には、ステップS106〜108の判定を省略して、ステップS110へ進むようにしてもよい。また、ステップS106〜108の判定のうち、いずれか1つまたは2つを省略するようにしてもよい。
【0084】
(変形例8)
上述した実施の形態では、テンプレートマッチング追尾処理およびラベリング追尾処理を実行する場合について説明したが、この他の被写体追尾処理を実行するようにしてもよい。
【0085】
具体的には、2つの被写体追尾処理(第1の被写体追尾処理および第2の被写体追尾処理)を実行するデジタルカメラにおいて、第1の被写体追尾処理が第2の被写体追尾処理よりも高速の処理であり、第2の被写体追尾処理が第1の被写体追尾処理よりも高精度の処理であるように構成する。そして、第1の被写体追尾処理により特定した追尾被写体位置と、第2の被写体追尾処理により特定した追尾被写体位置との距離が所定値未満である場合には、第1の被写体追尾処理または第2の被写体追尾処理により特定した追尾被写体位置を用いて次回の第1の被写体追尾処理による探索範囲を設定する。一方、上記距離が所定値以上である場合には、第2の被写体追尾処理により特定した追尾被写体位置を用いて次回の第1の被写体追尾処理による探索範囲を設定する。こうすることにより、上述した実施の形態と同様に、高速の処理である第1の被写体追尾処理を用いてリアルタイムに被写体を追尾できると共に、高精度の処理である第2の被写体追尾処理を用いて第1の被写体追尾処理の追尾性能を向上できる。
【0086】
なお、第1または第2の被写体追尾処理としては、上記テンプレートマッチング追尾処理およびラベリング追尾処理以外にも、例えば、背景差分法を用いた被写体追尾処理など種々の被写体追尾処理を用いることができる。
【0087】
(変形例9)
上述した実施の形態では、本発明をデジタルカメラに適用する場合について説明した。しかしながら、本発明は、動画データを読み込んで、動画中の被写体をフレーム間で追尾するための被写体追尾装置として、たとえばパソコンや携帯端末などに適用することも可能である。
【0088】
以上の説明はあくまで一例であり、上記の実施形態の構成に何ら限定されるものではない。
【符号の説明】
【0089】
1…撮影レンズ
9…第1撮像素子
10…制御部
11…第1ブロック化部
12…テンプレートマッチング追尾部
13…第2ブロック化部
14…ラベリング追尾部
15…AF機能実行部
【特許請求の範囲】
【請求項1】
入力画像内に第1の探索範囲を設定し、前記第1の探索範囲内の画像に対して、追尾被写体の基準となるテンプレート画像を基にテンプレートマッチング処理を行い、前記処理結果に基づいて追尾被写体位置を特定する第1の追尾手段と、
前記入力画像内に第2の探索範囲を設定し、前記第2の探索範囲内の画像に対して、追尾被写体の基準となる輝度情報または色情報に基づいて設定された基準値を用いて2値化処理およびラベリング処理を行い、前記処理結果に基づいて追尾被写体位置を特定する第2の追尾手段と、
を備え、
前記第1の追尾手段は、前記第1の追尾手段が特定した追尾被写体位置と、前記第2の追尾手段が特定した追尾被写体位置との距離が所定値未満である場合には、前記第1の追尾手段または前記第2の追尾手段が特定した追尾被写体位置を用いて次回の第1の探索範囲を設定し、前記第1の追尾手段が特定した追尾被写体位置と、前記第2の追尾手段が特定した追尾被写体位置との距離が所定値以上である場合には、前記第2の追尾手段が特定した追尾被写体位置を用いて次回の第1の探索範囲を設定することを特徴とする被写体追尾装置。
【請求項2】
請求項1に記載の被写体追尾装置において、
前記第1の追尾手段は、前記第1の追尾手段が特定した追尾被写体位置と、前記第2の追尾手段が特定した追尾被写体位置との距離が所定値以上であっても、前記第2の追尾手段が特定した追尾被写体位置の演算時刻が前記第1の追尾手段が特定した追尾被写体位置の演算時刻から所定時間以上離れている場合には、前記第1の追尾手段が特定した追尾被写体位置を用いて次回の第1の探索範囲を設定することを特徴とする被写体追尾装置。
【請求項3】
請求項1または2に記載の被写体追尾装置において、
前記第1の追尾手段が特定した追尾被写体位置の信頼度を判定する第1の判定手段をさらに備え、
前記第1の追尾手段は、前記第1の追尾手段が特定した追尾被写体位置と、前記第2の追尾手段が特定した追尾被写体位置との距離が所定値以上であっても、前記第1の判定手段により前記信頼度が高いと判定された場合には、前記第1の追尾手段が特定した追尾被写体位置を用いて次回の第1の探索範囲を設定することを特徴とする被写体追尾装置。
【請求項4】
請求項1〜3のいずれか一項に記載の被写体追尾装置において、
前記第2の追尾手段が特定した追尾被写体位置の信頼度を判定する第2の判定手段をさらに備え、
前記第1の追尾手段は、前記第1の追尾手段が特定した追尾被写体位置と、前記第2の追尾手段が特定した追尾被写体位置との距離が所定値以上であっても、前記第2の判定手段により前記信頼度が低いと判定された場合には、今回と同様の第1の探索範囲を次回の第1の探索範囲として設定することを特徴とする被写体追尾装置。
【請求項5】
請求項1〜4のいずれか一項に記載の被写体追尾装置において、
前記入力画像を、第1の数のブロックに分割する第1の分割手段と、
前記入力画像を、前記第1の数よりも多い第2の数のブロックに分割する第2の分割手段と、
をさらに備え、
前記第1の追尾手段は、前記第1の数のブロックに分割された前記入力画像を用いて前記テンプレートマッチング処理を行い、
前記第2の追尾手段は、前記第2の数のブロックに分割された前記入力画像を用いて前記2値化処理およびラベリング処理を行うことを特徴とする被写体追尾装置。
【請求項6】
請求項1〜5のいずれか一項に記載の被写体追尾装置において、
前記第1の追尾手段は、前記第1の追尾手段が特定した追尾被写体位置と、前記第2の追尾手段が特定した追尾被写体位置との距離が所定値未満である場合には、前記第1の追尾手段が特定した追尾被写体位置を用いて次回の第1の探索範囲を設定することを特徴とする被写体追尾装置。
【請求項7】
入力画像内に第1の探索範囲を設定し、前記第1の探索範囲内の画像に対して第1の被写体追尾処理を行い、前記処理結果に基づいて追尾被写体位置を特定する第1の追尾手段と、
前記入力画像内に第2の探索範囲を設定し、前記第2の探索範囲内の画像に対して、第2の被写体追尾処理を行い、前記処理結果に基づいて追尾被写体位置を特定する第2の追尾手段と、
を備え、
前記第1の被写体追尾処理は、前記第2の被写体追尾処理よりも高速の処理であり、
前記第2の被写体追尾処理は、前記第1の被写体追尾処理よりも高精度の処理であり、
前記第1の追尾手段は、前記第1の追尾手段が特定した追尾被写体位置と、前記第2の追尾手段が特定した追尾被写体位置との距離が所定値未満である場合には、前記第1の追尾手段または前記第2の追尾手段が特定した追尾被写体位置を用いて次回の第1の探索範囲を設定し、前記第1の追尾手段が特定した追尾被写体位置と、前記第2の追尾手段が特定した追尾被写体位置との距離が所定値以上である場合には、前記第2の追尾手段が特定した追尾被写体位置を用いて次回の第1の探索範囲を設定することを特徴とする被写体追尾装置。
【請求項8】
請求項1〜7のいずれか一項に記載の被写体追尾装置を備えることを特徴とするカメラ。
【請求項1】
入力画像内に第1の探索範囲を設定し、前記第1の探索範囲内の画像に対して、追尾被写体の基準となるテンプレート画像を基にテンプレートマッチング処理を行い、前記処理結果に基づいて追尾被写体位置を特定する第1の追尾手段と、
前記入力画像内に第2の探索範囲を設定し、前記第2の探索範囲内の画像に対して、追尾被写体の基準となる輝度情報または色情報に基づいて設定された基準値を用いて2値化処理およびラベリング処理を行い、前記処理結果に基づいて追尾被写体位置を特定する第2の追尾手段と、
を備え、
前記第1の追尾手段は、前記第1の追尾手段が特定した追尾被写体位置と、前記第2の追尾手段が特定した追尾被写体位置との距離が所定値未満である場合には、前記第1の追尾手段または前記第2の追尾手段が特定した追尾被写体位置を用いて次回の第1の探索範囲を設定し、前記第1の追尾手段が特定した追尾被写体位置と、前記第2の追尾手段が特定した追尾被写体位置との距離が所定値以上である場合には、前記第2の追尾手段が特定した追尾被写体位置を用いて次回の第1の探索範囲を設定することを特徴とする被写体追尾装置。
【請求項2】
請求項1に記載の被写体追尾装置において、
前記第1の追尾手段は、前記第1の追尾手段が特定した追尾被写体位置と、前記第2の追尾手段が特定した追尾被写体位置との距離が所定値以上であっても、前記第2の追尾手段が特定した追尾被写体位置の演算時刻が前記第1の追尾手段が特定した追尾被写体位置の演算時刻から所定時間以上離れている場合には、前記第1の追尾手段が特定した追尾被写体位置を用いて次回の第1の探索範囲を設定することを特徴とする被写体追尾装置。
【請求項3】
請求項1または2に記載の被写体追尾装置において、
前記第1の追尾手段が特定した追尾被写体位置の信頼度を判定する第1の判定手段をさらに備え、
前記第1の追尾手段は、前記第1の追尾手段が特定した追尾被写体位置と、前記第2の追尾手段が特定した追尾被写体位置との距離が所定値以上であっても、前記第1の判定手段により前記信頼度が高いと判定された場合には、前記第1の追尾手段が特定した追尾被写体位置を用いて次回の第1の探索範囲を設定することを特徴とする被写体追尾装置。
【請求項4】
請求項1〜3のいずれか一項に記載の被写体追尾装置において、
前記第2の追尾手段が特定した追尾被写体位置の信頼度を判定する第2の判定手段をさらに備え、
前記第1の追尾手段は、前記第1の追尾手段が特定した追尾被写体位置と、前記第2の追尾手段が特定した追尾被写体位置との距離が所定値以上であっても、前記第2の判定手段により前記信頼度が低いと判定された場合には、今回と同様の第1の探索範囲を次回の第1の探索範囲として設定することを特徴とする被写体追尾装置。
【請求項5】
請求項1〜4のいずれか一項に記載の被写体追尾装置において、
前記入力画像を、第1の数のブロックに分割する第1の分割手段と、
前記入力画像を、前記第1の数よりも多い第2の数のブロックに分割する第2の分割手段と、
をさらに備え、
前記第1の追尾手段は、前記第1の数のブロックに分割された前記入力画像を用いて前記テンプレートマッチング処理を行い、
前記第2の追尾手段は、前記第2の数のブロックに分割された前記入力画像を用いて前記2値化処理およびラベリング処理を行うことを特徴とする被写体追尾装置。
【請求項6】
請求項1〜5のいずれか一項に記載の被写体追尾装置において、
前記第1の追尾手段は、前記第1の追尾手段が特定した追尾被写体位置と、前記第2の追尾手段が特定した追尾被写体位置との距離が所定値未満である場合には、前記第1の追尾手段が特定した追尾被写体位置を用いて次回の第1の探索範囲を設定することを特徴とする被写体追尾装置。
【請求項7】
入力画像内に第1の探索範囲を設定し、前記第1の探索範囲内の画像に対して第1の被写体追尾処理を行い、前記処理結果に基づいて追尾被写体位置を特定する第1の追尾手段と、
前記入力画像内に第2の探索範囲を設定し、前記第2の探索範囲内の画像に対して、第2の被写体追尾処理を行い、前記処理結果に基づいて追尾被写体位置を特定する第2の追尾手段と、
を備え、
前記第1の被写体追尾処理は、前記第2の被写体追尾処理よりも高速の処理であり、
前記第2の被写体追尾処理は、前記第1の被写体追尾処理よりも高精度の処理であり、
前記第1の追尾手段は、前記第1の追尾手段が特定した追尾被写体位置と、前記第2の追尾手段が特定した追尾被写体位置との距離が所定値未満である場合には、前記第1の追尾手段または前記第2の追尾手段が特定した追尾被写体位置を用いて次回の第1の探索範囲を設定し、前記第1の追尾手段が特定した追尾被写体位置と、前記第2の追尾手段が特定した追尾被写体位置との距離が所定値以上である場合には、前記第2の追尾手段が特定した追尾被写体位置を用いて次回の第1の探索範囲を設定することを特徴とする被写体追尾装置。
【請求項8】
請求項1〜7のいずれか一項に記載の被写体追尾装置を備えることを特徴とするカメラ。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2013−85089(P2013−85089A)
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願番号】特願2011−223137(P2011−223137)
【出願日】平成23年10月7日(2011.10.7)
【出願人】(000004112)株式会社ニコン (12,601)
【Fターム(参考)】
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願日】平成23年10月7日(2011.10.7)
【出願人】(000004112)株式会社ニコン (12,601)
【Fターム(参考)】
[ Back to top ]