
被写地物の位置特定方法とそのプログラム、及び表示地図、並びに撮影位置取得方法とそのプログラム、及び撮影位置取得装置
【課題】本願発明の課題は、測量技師など人が被災地に立ち入ることなく地物位置(例えば、被災位置)や地物形状(例えば、被災規模)を把握する方法とそのプログラムを提供するとともに、撮影した写真によって写真撮影位置を特定できる方法と装置とそのプログラムを提供することにある。
【解決手段】本願発明の被写地物の位置特定方法は、被写地物の形状から4点以上の特徴点を選出するとともに、これら特徴点に対して座標を付与し、地表モデルを投影したモデル形状から特徴点に相当する点を4点以上選出するとともに座標を付与し、被写地物の特徴点とモデル形状の特徴点に相当する点とを対応させることで、写真平面内の任意座標系とモデル形状を表す平面内の任意座標系とを関連づけ、数値標高モデルに基づいて、被写地物に空間情報を付与し、当該被写地物の位置又は/及び形状を特定する方法である。
【解決手段】本願発明の被写地物の位置特定方法は、被写地物の形状から4点以上の特徴点を選出するとともに、これら特徴点に対して座標を付与し、地表モデルを投影したモデル形状から特徴点に相当する点を4点以上選出するとともに座標を付与し、被写地物の特徴点とモデル形状の特徴点に相当する点とを対応させることで、写真平面内の任意座標系とモデル形状を表す平面内の任意座標系とを関連づけ、数値標高モデルに基づいて、被写地物に空間情報を付与し、当該被写地物の位置又は/及び形状を特定する方法である。
【発明の詳細な説明】
【技術分野】
【0001】
本願発明は、撮影した写真に写る被写地物の位置を特定する方法とプログラム、表示地図、及び写真を撮影した地点を特定する方法とそのプログラムと装置に関するものである。
【背景技術】
【0002】
我が国は地震が頻発する国として知られ、近年でも兵庫県南部地震や、新潟県中越地震など大きな地震が発生し、そのたびに甚大な被害を被っている。また、台風による被害もほぼ毎年のように発生しており、さらに昨今では、突発的に生ずる豪雨によって種々の被害を受けることがある。これら自然災害は、斜面崩壊を引き起こすことが多く、場合によっては地すべりの誘因となることもある。
【0003】
斜面崩壊や地すべり(以下、「斜面崩壊等」という。)は、直下にある集落、道路、河川、砂防施設に対して被害を与えるものであり、植林や樹木を倒し森林資源を滅失させるとともに自然環境に対して影響を与えるものである。斜面崩壊等の災害によって集落や道路などが被害を受けると、これらの機能を復旧すべく速やかに対策が施される。
【0004】
対策工の計画、設計を実施するためには、斜面崩壊等による被災位置や被災規模(崩壊した形状や大きさなど)をできるだけ正確に把握する必要がある。一方で、斜面崩壊等は2次災害のおそれもあり、災害後直ちに被災地に近寄ることはできない。従来では、安全の確認を待ったうえで、測量技師がトータルステーションなどの測量機器を携えて被災地に入り、被災位置や被災規模を計測していた。被災規模が大きな場合や、その被害による社会的影響が大きい場合など、航空機によるステレオ写真撮影を用いて被災位置や被災規模を把握することもあるが、写真撮影のための飛行は天候に左右されることもあり、機動性に欠けるうえその手間や費用も大掛かりとなってしまう。
【0005】
前述のとおり、斜面崩壊等の災害に対しては迅速に復旧対策を実施する必要があり、そのためには可能な限り速やかに被災位置や被災規模を把握しなければならない。しかしながら、トータルステーションなど測量機器による計測方法は、被災地の安全確認のため計測までに所定期間を要し迅速性に欠けるうえ、被災地に進入する危険と機器等の運搬のための過酷な労力を測量技師に要求していた。また、航空機によるステレオ写真撮影を用いる方法は、天候に左右されるなど機動性に欠けるとともに手間や費用がかかるうえ、被災地周辺に計測点を設置する必要があることから、やはり被災地の安全確認のための期間を要し迅速性にも欠けるものである。
【0006】
このように、被災位置や被災規模を把握する従来手法は種々問題を抱えていることから、測量技師など人が被災地に立ち入ることなく、しかも斜面崩壊等の災害発生後速やかに被災位置や被災規模を把握する手法が待望されていた。本願発明は、この期待に応えるべくなされたもので、デジタルカメラ等で撮影した写真と数値標高モデルを利用した発明である。
【0007】
撮影写真と数値標高モデルを用いて被災地などの位置を特定する技術に関してはこれまで提案されていないものの、本願発明でも一部利用している「数値標高モデルを任意視点から見た地形を用いた技術」についてはいくつか提案されている。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】国際公開公報WO2006/134962
【特許文献2】特開平05−46080
【発明の概要】
【発明が解決しようとする課題】
【0009】
特許文献1の投影図生成システムは、カーナビゲーションなどに利用されるもので、ある視点から3次元地形モデルを見たときの2次元投影面を表示するとともに、進行先の道路が遮蔽物によって隠れる場合にはこの遮蔽物を取り除いて表示するものである。
【0010】
特許文献2の透視図作成装置は、任意視点から3次元のデジタル位置データを見た投影面を透視図として表示するものであり、航行中の飛行機に搭載した場合など高速で視点位置が移動しても、その速度に対応した処理を行いリアルタイムで透視図を表示するものである。
【0011】
特許文献1や特許文献2のように、数値標高モデル(3次元の地形モデル)を任意の視点から見た投影面(あるいは透視面、以下「投影面」で統一する)を作成し、この投影面を利用する技術は、従来から様々な分野で利用されている。本願発明もこの任意視点からの投影面を利用するものであり、撮影された写真と照らし合わせることで写真中の地物位置が特定できることに着目してなされた発明である。
【0012】
さらに、投影面と写真中の地物を照合させると、その投影面の視点位置である写真撮影位置も特定できる。過去に撮影した写真がどこで撮影したものかを確認したい場合、あるいは観光地など不案内な場所で現在位置を把握したい場合など、撮影した写真によって、あるいは写真を撮影することによって写真撮影位置を特定できる技術はこれまで提案されることがなかった。
【0013】
本願発明の課題は、測量技師など人が被災地に立ち入ることなく地物位置(例えば、被災位置)や地物形状(例えば、被災規模)を把握する方法とそのプログラム及びその位置を表示した地図を提供するとともに、撮影した写真によって写真撮影位置を特定できる方法と装置とそのプログラムを提供することにある。
【課題を解決するための手段】
【0014】
本願発明の被写地物の位置特定方法は、数地標高モデルに基づいて、写真に写された被写地物の位置又は/及び形状を特定する方法であって、前記被写地物の形状から4点以上の特徴点を選出するとともに、これら特徴点に対して、写真平面内の任意座標系による座標を付与し、前記数値標高モデルに基づく地表モデルを投影したモデル形状から前記特徴点に相当する点を4点以上選出するとともに、これら特徴点に相当する点に対して、モデル形状を表す平面内の任意座標系の座標を付与し、前記被写地物の特徴点と、前記モデル形状の特徴点に相当する点とを対応させることで、写真平面内の任意座標系と、モデル形状を表す平面内の任意座標系とを関連づけ、前記数値標高モデルに基づいて、前記被写地物に空間情報を付与し、当該被写地物の位置又は/及び形状を特定する方法である。
【0015】
本願発明の被写地物の位置特定方法は、数値標高モデルに基づいて、写真に写された被写地物の位置又は/及び形状を特定する方法であって、前記被写地物の一部又は全部の形状に基づいて2次元の基準形状を作成するとともに、写真平面内の任意座標系により基準形状に座標を付与し、前記数値標高モデルに基づく地表モデルを投影した2次元のモデル形状を作成するとともに、このモデル形状を表す平面内の任意座標系によりモデル形状に座標を付与し、前記基準形状の構成要素と、前記モデル形状の構成要素とを対応させることで、写真平面内の任意座標系と、モデル形状を表す平面内の任意座標系と、を関連づけ、前記数値標高モデルに基づいて、前記被写地物に空間情報を付与し、当該被写地物の位置又は/及び形状を特定する方法とすることもできる。
【0016】
本願発明の被写地物の位置特定方法は、数値標高モデルに基づいて、写真に写された被写地物の位置又は/及び形状を特定する方法であって、前記被写地物の一部又は全部の画像に基づいて2次元の基準形状を作成するとともに、写真平面内の任意座標系により基準形状を構成する画素に座標を付与し、画像が付与された数値標高モデルに基づく地表モデルを投影した投影画像から、2次元のモデル形状を作成するとともに、このモデル形状を表す平面内の任意座標系によりモデル形状を構成する画素に座標を付与し、前記基準形状の画素と、前記モデル形状の画素とを対応させることで、写真平面内の任意座標系と、モデル形状を表す平面内の任意座標系とを関連づけ、前記数値標高モデルに基づいて、前記被写地物に空間情報を付与し、当該被写地物の位置又は/及び形状を特定する方法とすることもできる。
【0017】
本願発明の被写地物の位置特定方法は、請求項2又は請求項3記載の被写地物の位置特定方法において、地表モデルを投影するための視点及び視角を変えることによって、複数の地表モデルを投影した形状をモデル形状候補として作成し、前記モデル形状候補と基準形状を照合することによって、複数のモデル形状候補の中から基準形状に相当するものをモデル形状とすることもできる。
【0018】
本願発明の被写地物の表示地図は、数値標高モデルに基づいて、写真に写された被写地物の位置又は/及び形状が表示された地図であって、請求項1乃至請求項4記載の被写地物の位置特定方法によって、位置又は/及び形状が特定された被写地物が、表示されたものである。
【0019】
本願発明の被写地物の位置特定プログラムは、写真に写された被写地物の位置又は/及び形状を、数値標高モデルに基づいて特定するプログラムであって、請求項1乃至請求項4記載の被写地物の位置特定方法を、電子計算機(以下、「コンピュータ」という。)に実行させるものである。
【0020】
本願発明の撮影位置取得方法は、写真に写された被写地物、及び数値標高モデルに基づいて、被写地物を撮影した地点を取得する方法であって、前記被写地物の一部又は全部の形状に基づいて2次元の基準形状を作成するとともに、写真平面内の任意座標系により基準形状に座標を付与し、前記数値標高モデルに基づく地表モデルを投影するための視点及び視角を変えることによって、複数の地表モデルを投影した2次元の形状をモデル形状候補として作成するとともに、これらモデル形状候補を表す平面内の任意座標系によりモデル形状候補に座標を付与し、前記モデル形状候補と基準形状を照合することによって、複数のモデル形状候補の中から基準形状に相当するものをモデル形状として抽出し、前記抽出されたモデル形状に対応する視点を被写地物の撮影地点とする方法である。
【0021】
本願発明の撮影位置取得方法は、写真に写された被写地物、及び数値標高モデルに基づいて、被写地物を撮影した地点を取得する方法であって、前記被写地物の一部又は全部の画像に基づいて2次元の基準形状を作成するとともに、写真平面内の任意座標系により基準形状を構成する画素に座標を付与し、前記数値標高モデルに基づく地表モデルを投影するための視点及び視角を変えることによって、複数の地表モデルを投影した投影画像から、複数の2次元の形状をモデル形状候補として作成するとともに、これらモデル形状候補を表す平面内の任意座標系によりモデル形状を構成する画素に座標を付与し、前記モデル形状候補と基準形状を照合することによって、複数のモデル形状候補の中から基準形状に相当するものをモデル形状として抽出し、前記抽出されたモデル形状に対応する視点を被写地物の撮影地点とする方法とすることもできる。
【0022】
本願発明の撮影位置取得プログラムは、写真に写された被写地物、及び数値標高モデルに基づいて、被写地物を撮影した地点の位置情報を取得するプログラムであって、請求項7又は請求項8記載の撮影位置取得方法を、コンピュータに実行させるものである。
【0023】
本願発明の被写地物の撮影位置取得装置は、写真に写された被写地物、及び数値標高モデルに基づいて、被写地物を撮影した地点の位置情報を取得する装置であって、被写地物を撮影し、この画像データを取得する手段と、前記画像データから、請求項7又は請求項8記載の基準形状を作成する手段と、請求項7又は請求項8記載の複数のモデル形状候補を作成する手段と、前記モデル形状と基準形状を照合することによって、複数のモデル形状の中から基準形状に相当するものをモデル形状として抽出する手段と、前記抽出されたモデル形状に対応する視点を被写地物の撮影地点とする手段と、を備えたものである。
【発明の効果】
【0024】
本願発明の被写地物の位置特定方法とそのプログラム、及び表示地図には、次のような効果がある。
(1)現地で実施するのは被写地物の撮影だけであり、極めて容易に被写地物の位置や形状を把握することができる。
(2)例えば斜面崩壊等の位置や形状を把握する場合、被災地に人が立ち入ることがないので安全であり、しかも災害後直ちに位置や形状を把握できるので速やかに対策工を実施することができる。
【0025】
本願発明の撮影位置取得方法とそのプログラム、及び撮影位置取得装置には、次のような効果がある。
(1)過去に撮影した写真についてその撮影場所を特定することができるので、その写真の情報価値が高まる。
(2)写真を撮影するだけで現在位置を特定することができるので、観光地など不案内な場所でも的確に目的地へ移動することができる。
【図面の簡単な説明】
【0026】
【図1】航空レーザー計測を説明する説明図。
【図2】斜面の崩壊を撮影している状況を説明するための説明図。
【図3】(a)は「被写地物を撮影している状況」を側方から見たモデル図、(b)はカメラ画像面に映し出された画像を示す説明図。
【図4】(a)は数値標高モデルをモデル画像面に投影させた状況を示す説明図、(b)はモデル画像面に投影された画像を示す説明図。
【図5】2次元の射影変換によって基準形状とモデル形状を対応させる場合の実施フロー図。
【図6】(a)は被写地物から抽出される基準形状を説明するモデル図、(b)は数値標高モデルを基に作成されるモデル形状を説明するモデル図、(c)は基準形状とモデル形状を照らし合わせた状態を説明するモデル図。
【図7】モデル形状を作成する概念を示す説明図。
【図8】基準形状の構成点とモデル形状の構成点との対応を図る概念を示す説明図。
【図9】照合判断を行わずに基準形状に対して空間情報を付与する場合の実施フロー図。
【図10】「被写地物の位置特定システム」を構成する機器の配置を示す説明図。
【図11】照合判断を行ったうえで基準形状に対して空間情報を付与する場合の実施フロー図。
【図12】画像を基に基準形状とモデル形状を作成する場合であって、照合判断を伴う場合の実施フロー図。
【図13】撮影位置取得装置を用いて、撮影している位置を取得している状況を示す説明図。
【図14】写真の撮影位置情報を取得する場合の実施フロー図。
【図15】(a)は「撮影位置取得装置」を構成する機能を示すもので、全ての機能を一体型とした場合の説明図、(b)は「撮影位置取得装置」を構成する機能を示すもので、機能を分散型とした場合の説明図。
【発明を実施するための形態】
【0027】
本願発明の被写地物の位置特定方法とそのプログラム、及び表示地図、並びに撮影位置取得方法とそのプログラム、及び撮影位置取得装置の実施形態の例を図に基づいて説明する。
【0028】
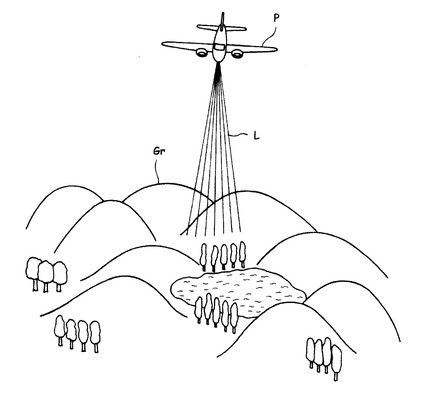
昨今、航空レーザー計測などの出現によって地形情報を大量に取得する計測手法が著しく高度化し、また、コンピュータの進化に伴い地形情報を扱う技術も飛躍的に進歩してきた。航空レーザー計測は、図1に示すように、計測したい地形Grの上空を航空機Pで飛行し、飛行中に地形Grに対して照射したレーザーLの反射を受けて計測するものである。この航空レーザー計測によれば、地形をあらわす情報として無数の3次元点群データ(X,Y,Z)を密に取得することが可能となり、さらにこの点群データをコンピュータで処理すれば、地形を立体的にモデル化することもできる。
【0029】
(数値標高モデルM)
3次元点群データにより構成されたモデルは「数値標高モデルM」(図4(a)、(b))と呼ばれ、代表的なものとしてはDEM(Digital Elevation Model)やDSM(Digital Surface Model)が挙げられる。もちろん、本願発明ではこれに限らず従来から用いられる種々の数値標高モデルMを利用することができる。また、本願発明の実施に当たっては、既存の数値標高モデルMを利用することが望ましいが、既存のものがなければ新たに数値標高モデルMを作成しこれを利用することができる。
【0030】
ここで、代表的な数値標高モデルMであるDEMについて簡単に説明する。DEMとは、地表面の形状である地形を数値モデル化したもので一般的には格子モデルである。DEMは、地表面の平面座標(X,Y)と標高値(Z)を有する点の集合であるいわゆる点群データに基づいて形成され、点群データが密であるほど正確に原地形を再現することができる。この点群データは、航空レーザー計測によって取得することが一般的である。もちろん、航空レーザー計測によるほか、ステレオの航空写真や衛星写真を基に三次元の空間情報をもつ点群データを生成してもよいし、直接現地を測量して三次元の空間情報をもつ点群データを取得してもよい。なお航空レーザー計測によって点群データを取得する場合、樹木頂部など地表面ではない計測データを取り除くいわゆるフィルタリング処理を施して、地表面の点群データとするのが一般的である。
【0031】
航空レーザー計測によって取得される点群データは、ランダムに計測されたレーザー計測点の集合にすぎず、DEMは以下の手順で作成される。すなわち、レーザー計測点が配点された上に、所定間隔(例えば2m)に配置された複数のグリッド(例えば正方格子)を被せる。この正方格子で区切られることにより格子点が生成され、多数の四角形(メッシュ)が形成される。メッシュには一つの代表点が設けられるが、その代表点の位置はメッシュの中心としたり、メッシュのうち右上隅の格子点としたり、状況に応じて適宜設定される。
【0032】
レーザー計測点の三次元座標(X,Y,Z)を基に、メッシュ代表点の平面座標(X,Y)と標高値(Z)を算出し、DEMを完成させる。この算出方法は、レーザー計測点から不整三角網より高さを求めるTIN(Triangulated Irregular Network)による補間法のほか、最も近いレーザー計測点を採用する最近隣法(Nearest Neibor)や、逆距離加重法(IWD)、Kriging法、平均法など種々の方法が採用される。
【0033】
数値標高モデルMは、国をはじめ各地方自治体では所管地域における数値標高モデルMの整備が推し進められている。また民間事業者のなかではライブラリ形式で数値標高モデルMを保有しているところもあって、近年では数値標高モデルMが身近で利用しやすいものとなっている。本願発明は、上記のように我が国全体で数値標高モデルMが蓄積されてきたことを背景になされたものであり、『写真に写された物の形状と、数値標高モデルMから計算されたモデル形状(2次元)とを照らし合わせることによって、必要な空間情報を取得する』、という技術的特徴を備えたものである。以下に説明する種々の実施形態は、共通してこの技術的特徴を備えるものであるが、便宜上、「被写地物の位置特定方法とそのプログラム、及び被写地物の表示地図」の実施形態と、「撮影位置取得方法とそのプログラム、及び撮影位置取得装置」の実施形態を分けて説明する。
【0034】
[被写地物の位置特定方法とそのプログラム、及び被写地物の表示地図の実施形態]
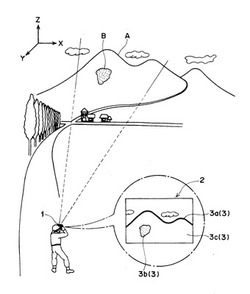
本実施形態は、本願発明の「被写地物の位置特定方法とそのプログラム、及び被写地物の表示地図」について説明するものである。なおここでは、「写真に写された物」を山の稜線A(以下、「スカイラインA」という。)や崩壊部B(図2)といった地物として説明しているが、これはあくまで説明のための一例であり、「写真に写された物」が他のあらゆる物(地物)であっても本願発明を実施できることはいうまでもない。
【0035】
図2は、斜面の崩壊を撮影している状況を説明するための説明図である。この図に示すように、この山の斜面には崩壊による被害が生じており、その崩壊部Bは目視により確認することができる。この被災地(斜面が崩壊した現場)から少し離れた位置に立った撮影者がカメラ1によって撮影したものが写真2であり、写真2にはスカイラインAと崩壊部Bを含む地物が収められている。ここでは、写真2に写されたスカイラインAを「被写スカイライン3a」、写真2に写された崩壊部Bを「被写崩壊部3b」と呼ぶこととし、これら「被写スカイライン3a」や「被写崩壊部3b」など写真2に写された地物の総称を「被写地物3」という。なお写真2は、地上から人が撮影して取得したものに限らず、航空機などの移動体で移動しながら撮影したものでもよい。
【0036】
(実施形態1)
ここでは、「被写地物の位置特定方法とそのプログラム、及び被写地物の表示地図」の第1の実施形態について説明する。本実施形態は、写真画像内の被写地物3から基準形状を作成し、これとは別に数値標高モデルMを基にモデル形状を作成し、基準形状を構成する点から4点以上の特徴点を抽出するとともに、これら特徴点とモデル形状の構成点とを対応させることによって、基準形状とモデル形状を照らし合わせる、という手法について説明するものである。つまり、一枚の写真2(単写真)と一つのモデル形状5を対応させることで地物に座標を付与できるのが本願発明の特徴であり、2枚1組の写真を用いて座標を付与する従来方式(ステレオマッチング方式)とは、この点において著しく異なる。
【0037】
(基準形状)
図3(a)は、図2に示す「被写地物3を撮影している状況」を側方から見たモデル図であり、カメラ1で山の正面からの像を写し取った状況を示す説明図である。また、図2に示すように実空間の座標軸をX軸、Y軸、Z軸とすると、図2をY−Z面で切り取ったものが図3(a)である。図3(a)に示すように、いま対象物である山をカメラ1で撮影しており、その撮影した画像がカメラ画像面Phに写し出されている。このカメラ1の中心位置(以下、「視点」という。)の座標は、実空間座標系で(X0,Y0,Z0)で表され、カメラ1の傾き(以下、「撮影姿勢」という。)は、それぞれX軸回りの傾きがω(ピッチ)、Y軸回りの傾きがφ(ロール)、Z軸回りの傾きがκ(ヨー)となっている。なお、カメラ1の空間的な配置を決定する(X0,Y0,Z0)及び(ω,φ,κ)は、外部標定要素と呼ばれる。
【0038】
図3(b)は、図3(a)に示すカメラ画像面Phに映し出された画像であって、写真2に写された画像である。この画像内にある地物(物)の中から抽出されるのが基準形状4である。この場合、写真2の中に収められた全ての被写地物3に基づいて基準形状4を作成してもよいが、後に説明するモデル形状5(図6(b))と対応させるため、モデル形状5と対応させやすい(つまり数値標高モデルMで表現可能な)地物を抽出して基準形状4を作成することもできる。本実施形態では、写真2に写された被写地物3の中から被写スカイライン3aを基準形状4として抽出している。
【0039】
基準形状4は、CADなどの作図アプリケーションを利用して被写スカイライン3aをトレースするように作図することができる。あるいは、写真2の画像データを利用し、画像データ内の空と山の輝度(あるいは色相や彩度や明度)の違いから、スカイラインAをエッジとしてコンピュータで自動生成させ、このエッジを利用して基準形状4を作成することもできる。このように作成された基準形状4は2次元の形状であり、この形状を構成する幾何学的要素(点、線分、面など)には、カメラ画像面Ph(写真2)内における任意の座標系(xa,ya)の座標で表すことができる。以下、このカメラ画像面Ph内における任意座標系を写真座標系という。また、基準形状4を構成する点の中から、その形状を特徴づける構成点を4点以上選出してこれらを特徴点とする。図3(b)では、特徴点A1〜特徴点A5の5点が抽出されている。
【0040】
(モデル形状)
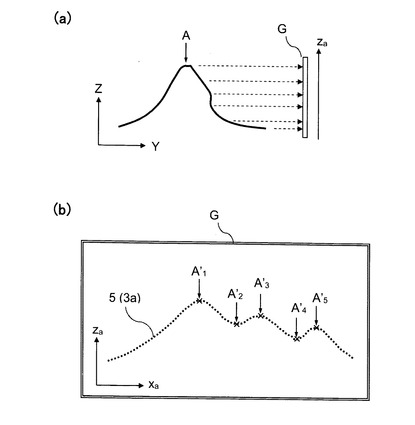
図4(a)は、数値標高モデルMをモデル画像面Gに投影させた状況を示す説明図である。なおこの図は、数値標高モデルMを基に立体的な地形モデルを作成し、さらにその断面図を示したものであり、図3(a)と同様、図2を実空間座標系のY−Z面で切り取ったものである。この数値標高モデルMによる立体的な地形モデルを、2次元に投影するための平面が図4(a)に示すモデル画像面Gである。なおこの図では便宜上、モデル画像面Gを、Z軸に平行(つまり鉛直面)で、かつX軸に平行に配置しているが、これに限らず任意の方向にモデル画像面Gを傾けても構わない。
【0041】
図4(b)は、図4(a)に示すモデル画像面Gに投影された画像である。この画像内にある地物(物)の中から抽出されるのがモデル形状5である。モデル形状5は2次元の形状であり、この形状を構成する幾何学的要素(点、線分、面など)には、モデル画像面G内における任意の座標系(xb,yb)の座標で表すことができる。以下、このモデル画像面G内における任意座標系をモデル座標系という。
【0042】
モデル形状5を抽出する際は、基準形状4の構成点から選出した特徴点に相当する点が少なくとも4点以上含まれるように抽出する(図4(b)ではA’1〜A’5)。これは、後に説明するように基準形状4の特徴点と、モデル形状5の特徴点(に相当する点)とを対応させる必要があるからである。そのため、カメラ1の視点(X0,Y0,Z0)と、カメラ1のZ軸回りの傾きκ(つまり方位)は、既知であることが望ましい。通常、数値標高モデルMは広範囲に作成されていることが多く、その中から何ら手がかりもない状態で基準形状4の特徴点を含むモデル形状5を抽出することは、著しく時間と手間を要するからである。なお、基準形状4の特徴点に相当する点を選出するには、例えば目視等によって判断することができる。
【0043】
(基準形状とモデル形状との対応)
図4(b)に示すように、モデル画像面G内におけるモデル形状5の構成要素(構成点など)はモデル座標系(xb,yb)によって2次元の座標が付与され、図4(a)から分かるように、モデル形状5の各構成要素は数値標高モデルMの空間座標と対応している。すなわち、モデル形状5の構成要素は数値標高モデルMの空間座標と紐づいており、言い換えればモデル形状5の構成要素は実空間における3次元座標を有している。
【0044】
一方、カメラ画像面Ph内の基準形状4は、数値標高モデルMなど既知の空間座標を有するものと対応していないので、カメラ1で撮影しただけでは基準形状4の構成要素を実空間の3次元座標で表すことができない。そこで、基準形状4の特徴点A1〜A5とモデル形状5の特徴点に相当する点A’1〜A’5とを対応させることによって、基準形状4の構成要素に実空間の3次元座標を付与する。
【0045】
基準形状4は同一平面上に表された2次元の形状であり、モデル形状5も同様に同一平面上に表された2次元の形状であるから、2次元の射影変換式を用いることができる。すなわち、基準形状4の特徴点を射影変換したものが、モデル形状5の特徴点に相当する点とすれば、両者の座標系、つまり「写真座標系(xa,ya)」と「モデル座標系(xb,yb)」は空間的に関連付けることができる。なお、2次元の射影変換式は次式で与えられる。
【0046】
【数1】

ここで、
xa : 写真座標系における特徴点のx座標
ya : 写真座標系における特徴点のy座標
xb : モデル座標系における特徴点のx座標
yb : モデル座標系における特徴点のy座標
【0047】
この2式には8つの未知数b1〜b8があり、これら未知数の解を得るためには計8つの式が必要となる。つまり基準形状4の特徴点が4点、モデル形状5の特徴点に相当する点が4点、既知でなければならない。基準形状4とモデル形状5それぞれに、特徴点(特徴点に相当する点)を4点以上必要としたのは、2次元の射影変換式の未知数の解を得るためである。なお、既知点がちょうど4点のときは8元1次方程式を解くことで一の解が得られるが、5点以上既知である場合は最小次乗法によって解を得ることができる。
【0048】
このようにして8つの未知数b1〜b8が求められると、「写真座標系(xa,ya)」と「モデル座標系(xb,yb)」は空間的に関連付けられる。つまり、前記した2次元の射影変換式を用いれば、カメラ画像面Ph内に配置された任意の点(つまり写真座標系で座標があてられる任意点)を、モデル画像面G内に配置することができる。このことは、カメラ画像面Ph内の任意点が、モデル座標系の2次元座標を得ることであり、つまり、数値標高モデルMの空間座標(3次元座標)と紐づけられることを意味する。換言すれば、写真座標系で表される基準形状4をモデル座標系で表現することによって、基準形状4に実空間の3次元座標を付与することができる。なお、カメラ画像面Phに基づく基準形状4をモデル画像で表現した形状は、理論上は、モデル画像面G内に表現されたモデル形状5(図4(b)内の破線形状)と一致するはずであるが、数値標高モデルMの作成精度等の理由から必ずしも一致するとは限らない。
【0049】
また基準形状4と同様、図3(b)に示す被写崩壊部3bに関しても、3次元の空間座標を付与することができる。その手順を以下に示す。カメラ画像面Ph内に表示された被写崩壊部3bを、基準形状4と同様の手法によって出力形状6として作成する。この出力形状6の構成要素(構成点など)は、写真座標系(xa,ya)によって2次元の座標が付与され、2次元の射影変換式を用いればモデル座標系(xb,yb)に変換することができる。このようにして出力形状6の構成要素は、モデル座標系の座標と関連づき、その結果、実空間の3次元座標を付与することができる。すなわち、現実に存在する崩壊部Bの位置や形状、大きさを特定することができる。
【0050】
(地図の作成)
崩壊部Bの位置や形状を特定することができると、既存の地図に記載して表示することが可能となり、崩壊部Bの情報を記した新たな地図を作成することができる。もちろん既存の地図に表示する場合に限らず、他の空間情報も加えて、崩壊部Bの位置や形状を記した新たな地図を作成することもできる。このように、崩壊部Bから十分離れて撮影するだけで地図上にプロットすることができるので、容易かつ安全に崩壊部Bを表示した地図を得ることができる。
【0051】
(実施フロー)
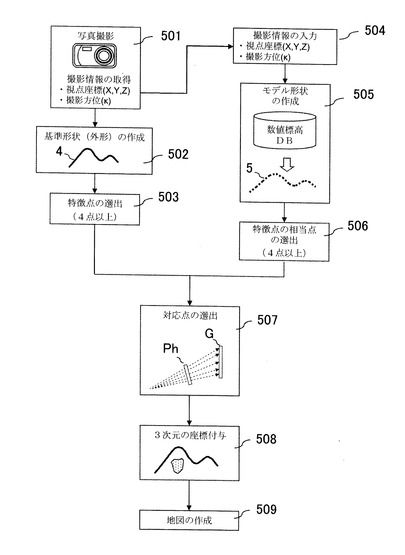
本実施形態を実施する手順の例を、図5に示す実施フローについて説明する。
【0052】
その位置や形状を特定したい地物(ここでは崩壊部Bとする)を含む画像(写真2)を、デジタルカメラなどのカメラ1によって取得する(501)。このとき、写真撮影したときの撮影情報(視点座標、撮影方位)を、GPSや電子コンパスなどの計測器を用いて計測しておく。
【0053】
写真2(つまりカメラ画像面Ph)の中に収められた被写地物3の中から、特徴ある部分を有する被写地物3(ここでは被写スカイライン3aとする)を抽出する。写真2の画像データ内における山と空の輝度の違いから被写スカイライン3aの境界(エッジ)をコンピュータで自動生成させ、このエッジを利用して基準形状4を作成する(502)。次に、基準形状4を構成する点の中からその形状を特徴づける特徴点を4点以上選出し、これらに写真座標系(xa,ya)の座標を付与する(503)。
【0054】
モデル形状5を作成するための撮影情報(視点座標、撮影方位)を入力する(504)。この入力値と既存の数値標高モデルMに基づいて、モデル画像面Gに平面投影させてモデル形状5を作成する(505)。次に、モデル形状5の中から、基準形状4の特徴点に相当する点を4点以上抽出する(506)。なお、ここで特徴点に相当する点を4点以上抽出できない場合は、作成範囲を変えて再度モデル形状5を作成する。
【0055】
基準形状4の特徴点(4点以上)と、モデル形状5の特徴点相当点(4点以上)に基づいて、2次元の射影変換を行い「写真座標系(xa,ya)」と「モデル座標系(xb,yb)」を関連付ける(507)。これにより、基準形状4(被写スカイライン3a)と被写崩壊部3bをモデル座標系(xb,yb)に変換することが可能となり、数値標高モデルMの空間座標と関連付けることが可能となる(508)。崩壊部Bが実空間上で特定できると、既存の地図にこれを記載し、崩壊部Bの情報を記した地図を作成する(509)。
【0056】
(実施形態2)
ここでは、「被写地物の位置特定方法とそのプログラム、及び被写地物の表示地図」の第2の実施形態について説明する。本実施形態は、実施形態1の特徴点の抽出による射影変換に代えて、直接的に基準形状4とモデル形状5との対応を図る場合について説明するものであり、実施形態1と共通する技術内容に関する説明は省略する。
【0057】
(基準形状)
図6(a)は被写地物3から抽出される基準形状4を説明するモデル図、図6(b)は数値標高モデルMを基に作成されるモデル形状5を説明するモデル図、図6(c)は基準形状4とモデル形状5を照らし合わせた状態を説明するモデル図である。図2で撮影した写真2の中に収められた被写地物3は、数値標高モデルMを基に作成されるモデル形状5と直接対応させることによって空間情報を付与することができる。つまり、一枚の写真2(単写真)と一つのモデル形状5を対応させることで地物に座標を付与できるのが本願発明の特徴であり、2枚1組の写真を用いて座標を付与する従来方式(ステレオマッチング方式)とは、この点において著しく異なる。
【0058】
被写地物3とモデル形状5を対応させる場合、直接的に(例えば目視により)行うのではなく、被写地物3をコンピュータで処理できる基準形状4としたうえでモデル形状5と対応させることが望ましい。また、モデル形状5と対応させる基準形状4は、写真2の中に収められた全ての被写地物3に基づいて作成してもよいが、モデル形状5と対応させやすい(つまり数値標高モデルMで表現可能な)地物を被写地物3の中から抽出して作成する方が好適である。本実施形態では、写真2に写された被写地物3の中から被写スカイライン3aを抽出している。
【0059】
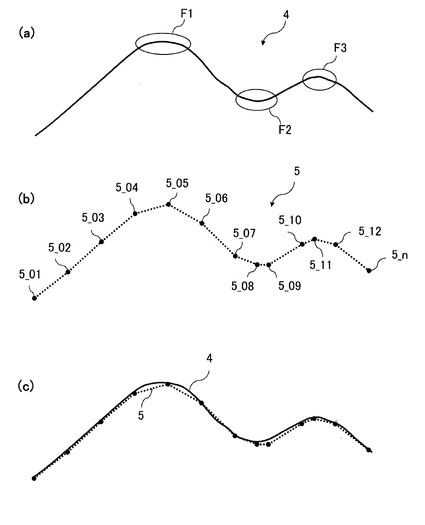
基準形状4は、CADなどの作図アプリケーションを利用して被写スカイライン3aをトレースするように作図することができる。あるいは、写真2の画像データを利用し、画像データ内の空と山の輝度(あるいは色相や彩度や明度)の違いから、スカイラインAをエッジとしてコンピュータで自動生成させ、このエッジを利用して基準形状4を作成することもできる。このように作成された基準形状4は2次元の形状であり、この形状を構成する幾何学的要素(点、線分、面など)は、写真2内における任意の座標系(xa,ya)の座標で表すことができる。以下、この写真2内における任意座標系を写真座標系という。また、基準形状4を構成する点の中から、その形状を特徴づける部分(以下、「特徴部」という。)を選出しておくこともできる。この特徴部としては、特徴ある点(例えば、山の頂点や谷部の変化点)に限らず、線分の曲率といった局所的に特徴を持つ部分を選出することができる。なお、図6(a)では特徴部として尾根部F1、谷部F2、尾根部F3の3箇所が選出されている。
【0060】
(モデル形状)
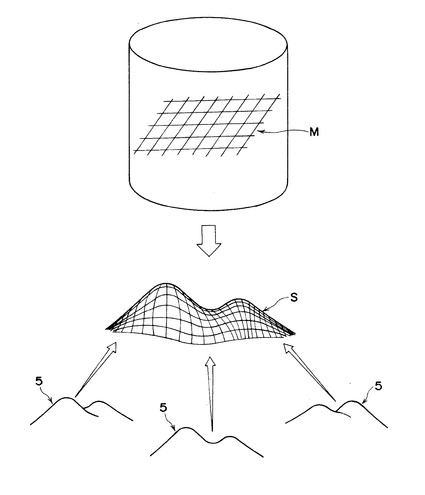
図7は、モデル形状5を作成する概念を示す説明図である。モデル形状5は、数値標高モデルMを基に空間演算することで作成される2次元の形状であり、基準形状4と対応させるものである。前記のとおり数値標高モデルMは3次元の空間座標を備えているため、図7に示すように、立体的な地形モデルを作成することが可能であり、換言すれば仮想の地形表面(以下、「地表モデルS」という。)を再現することができる。この地表モデルSを任意地点から投影して作成される投影地形(2次元形状)が、モデル形状5である。つまり、仮に地表モデルSを任意地点からカメラ撮影したとすれば得られるはずの地形が、モデル形状5となる。
【0061】
具体的には、数値標高モデルMに「視点」情報と「視角」情報を与えて空間演算処理すると、投影地形すなわちモデル形状5が作成される。図7では、異なる3地点から投影して、3つの異なるモデル形状5を作成している。なおここでいう「視点」とは、投影する実空間上の3次元座標(X,Y,Z)であって、カメラ中心位置に該当する概念である。また、「視角」とは、投影方向及び視野角のことで、この投影方向はカメラ撮影する場合の撮影姿勢(X軸回りの傾きω(ピッチ)、Y軸回りの傾きφ(ロール)、Z軸回りの傾きκ(ヨー))に該当する概念であり、視野角は画面距離などで規定されるカメラ撮影範囲に該当するものである。
【0062】
視角(投影方向と視野角)及び視点を決め、数値標高モデルMを基に空間演算すれば、投影される地表モデルS上の範囲が特定されるとともに、その特定された範囲内の地形を同一平面(以下この平面を、「モデル画像面G」という。)上で、2次元の形状として表現することができる。ここで表現される2次元の形状が「モデル形状5」であり、この形状を構成する幾何学的要素(点、線分、面など)は、モデル画像面G内における任意の座標系(xb,yb)の座標で表すことができる。以下、このモデル画像面G内における任意座標系をモデル座標系という。なお、このような技術は、前記した特許文献1や特許文献2でも紹介されているとおり従来から用いられているものであり、これを実行するアプリケーションプログラムも市販されている。
【0063】
(基準形状とモデル形状との対応)
図6(a)に示す基準形状4を作成し、図6(b)に示すモデル形状5を作成すると、次に図6(c)に示すように基準形状4とモデル形状5を照らし合わせてそれぞれの構成要素同士の対応を図る。
【0064】
モデル形状5を作成する際に入力する視点及び視角(投影方向と視野角)を、基準形状4作成のために撮影したときの実際の撮影条件値(カメラ中心位置の座標、撮影姿勢、撮影範囲)とすれば、理論的には基準形状4とモデル形状5は完全に一致する。つまり、カメラ中心位置の座標(X,Y,Z)を「視点」とし、撮影姿勢(ω,φ,κ)を「視角」のうちの投影方向とし、撮影した撮影範囲を「視角」のうちの視野角として作成されたモデル形状5は、基準形状4と完全に一致する。なお、カメラ中心位置の座標やカメラ撮影姿勢を計測するには、トータルステーションや方位計(磁石、電子コンパス等)を利用することができるし、とくに飛行中に撮影する場合はGPSとIMUを利用することができる。また、撮影した撮影範囲を得るためには、カメラ1の諸元(画角、画面距離など)から求めることができる。
【0065】
基準形状4とモデル形状5が完全に一致すれば、これらを照らし合わせてそれぞれの構成要素同士の対応を図ることは容易である。しかしながら、実際には撮影条件値の計測精度や数値標高モデルMの位置精度の影響により、基準形状4とモデル形状5が完全に一致しないこともある(図6(c))。このような場合、基準形状4とモデル形状5をできる限り重なり合うように配置(以下、この状態を「最接近配置」という。)し、双方の近接している構成要素同士を対応させる。
【0066】
例えば、基準形状4とモデル形状5を同一の座標系(写真座標系もしくはモデル座標系)に配置し、さらに最小二乗法などによって基準形状4の構成点とモデル形状5の構成点との誤差(絶対値)が最小となるように両形状を最接近配置することができる。あるいは、基準形状4に反映させた特徴部(図6(a)の尾根部F1、谷部F2、尾根部F3)に着目し、この特徴部に相当するモデル形状5の特徴的な形状を抽出して、これと基準形状4の特徴部が合致するように最接近配置することもできる。
【0067】
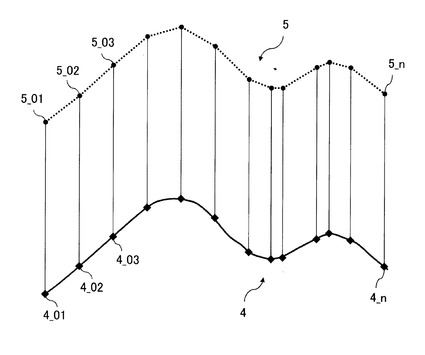
最接近配置の状態で基準形状4とモデル形状5それぞれの構成要素を対応させる方法としては、次のような手法が例示できる。すなわち、最接近配置とした状態で、基準形状4の構成点とモデル形状5の構成点で最も接近している構成点同士を対応させる方法、所定ピッチのX座標で基準形状4とモデル形状5それぞれの構成点を算出して同じX座標の構成点同士を対応させる方法(図8)、あるいは、基準形状4をモデル形状5の形状(構成要素)に置き換える方法などが挙げられる。
【0068】
基準形状4とモデル形状5の構成要素の対応させる概念は、例えば、図8のように示すことができる。この図では、モデル形状5の構成点5_01、構成点5_02、構成点5_03、・・・構成点5_nを、それぞれ基準形状4の構成点4_01、構成点4_02、構成点4_03、・・・構成点4_nに対応させ、関連付けている。このように、基準形状4の構成点とモデル形状5の構成点との対応付けができれば、基準形状4の構成点4_01、構成点4_02、構成点4_03、・・・構成点4_nに、空間情報を与えることができる。すなわち、モデル形状5の構成点5_01、構成点5_02、構成点5_03、・・・構成点5_nは、本来、数値標高モデルMに基づいて作成されたものであるから、それぞれモデル形状5の構成点は実空間における3次元座標を含む空間情報(属性情報を含む場合もある)に紐づいており(つまり有しており)、このモデル形状5の構成点が有する空間情報を、それぞれ対応する基準形状4の構成点に付与すれば、基準形状4の構成点は空間情報を得ることができるわけである。なお、ここでは構成要素として構成点を対応させているが、これに限らず線分や線分の組み合わせ、あるいは面を用いて対応させてもよく、要は基準形状4とモデル形状5を構成する要素同士を対応させればよい。上記のように、基準形状4とモデル形状5の双方の構成要素同士を関連付けて、モデル形状5の構成要素の空間情報を、関連付けられた基準形状4の構成要素に与えてもよいし、これに代えて、基準形状4をモデル形状5に置き換えて基準形状4に空間情報を付与(モデル形状5の空間情報をそのまま利用)してもよい。
【0069】
基準形状4の構成点が空間情報を得たことによって、被写地物3のうち基準形状4の対象とならなかった被写地物3に対しても空間情報を付与することができる。つまり、本実施形態でいえば、被写地物3のうち「被写スカイライン3a」を基準形状4の対象としており、被写崩壊部3bは基準形状4の対象としていないが、この被写崩壊部3bに対しても空間情報を付与することができる。
【0070】
空間情報を付与したい被写地物(ここでは、被写崩壊部3bとする)について、基準形状4を作成したのと同様に、2次元の形状(以下、「出力形状6」という。)を作成する。出力形状6は、写真座標系(xa,ya)に配置することができるので、写真座標系の座標で表すことができる。また、基準形状4とモデル形状5を最接近配置とした状態は、両者が同一平面上に配置されているので、写真座標系のxa軸とモデル座標系のxb軸との較差(ずれ)、写真座標系のya軸とモデル座標系のyb軸との較差(ずれ)が分かる。従って、写真座標系(xa,ya)に配置された任意の点は、モデル座標系(xb,yb)へ変換することが可能で、出力形状6もモデル座標系の座標で表すことができて、その結果、実空間の3次元座標を付与することができる。つまり、現実に存在する崩壊部Bの位置や形状、大きさを特定することができる。
【0071】
(地図の作成)
崩壊部Bの位置や形状を特定することができると、既存の地図に記載して表示することが可能となり、崩壊部Bの情報を記した新たな地図を作成することができる。もちろん既存の地図に表示する場合に限らず、他の空間情報も加えて、崩壊部Bの位置や形状を記した新たな地図を作成することもできる。このように、崩壊部Bから十分離れて撮影するだけで地図上にプロットすることができるので、容易かつ安全に崩壊部Bを表示した地図を得ることができる。
【0072】
(実施フロー)
本実施形態を実施する手順の例を、図9に示す実施フローについて説明する。
【0073】
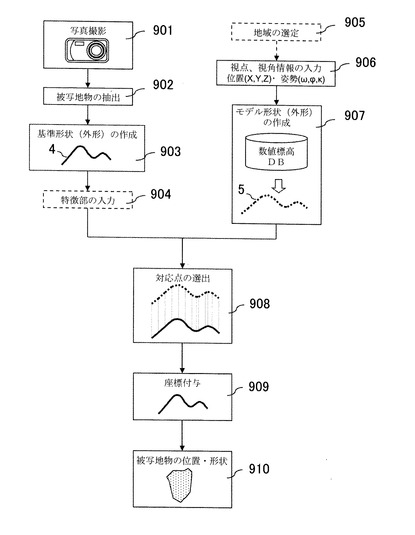
その位置や形状を特定したい被写地物(ここでは被写崩壊部3bとする)を含む画像(写真2)を、デジタルカメラなどのカメラ1によって取得する(901)。このとき、写真撮影したときの撮影条件値(カメラ中心位置の座標、撮影姿勢、撮影範囲)を、GPSやIMUなどの計測器を用いて計測しておく。
【0074】
写真2の中に収められた被写地物3の中から、モデル形状5と対応させやすい被写地物3(ここでは被写スカイライン3aとする)を抽出する(902)。写真2の画像データ内における山と空の輝度の違いから被写スカイライン3aの境界(エッジ)をコンピュータで自動生成させ、このエッジを構成する構成点に写真座標系の座標を付与し、これを基準形状4とする(903)。このとき、尾根部F1、谷部F2、尾根部F3を特徴部として基準形状4に反映させる(904)こともできる。
【0075】
既存の数値標高モデルMのうち、被写地物3を含む地域を選定する(905)。数値標高モデルMが広範にわたる場合は、ある程度その範囲を限定することで演算処理にかかる負荷を軽減させることができるからであり、数値標高モデルMの範囲が比較的限定的であれば必ずしも地域を選定する必要はない。
【0076】
撮影条件値(カメラ中心位置の座標、撮影姿勢、撮影範囲)を、モデル形状5を作成するための視点及び視角(投影方向と視野角)として入力する(906)。このうち、カメラ中心位置の座標と撮影姿勢については撮影時に計測した値を、撮影範囲についてはカメラ1の諸元(焦点距離や画面距離など)から求めた値を用いる。ここで入力された視点及び視角と、地域選定された数値標高モデルMと、に基づいて空間演算処理が行われ、2次元の形状であるモデル形状5が作成される(907)。
【0077】
基準形状4とモデル形状5を同一の座標系(2次元)に配置し、さらに基準形状4とモデル形状5とができるだけ一致するように両形状を最接近配置の状態に置く。このとき、基準形状4に反映させた特徴部に着目しながら、基準形状4とモデル形状5とを照らし合わせるとよい。また、最小二乗法などによって基準形状4の構成点とモデル形状5の構成点との誤差(絶対値)が最小となるような最接近配置としてもよい。この最接近配置の状態で、基準形状4の構成点とモデル形状5の構成点で最も接近している構成点同士(あるいは同一のX座標を持つもの同士(図8)など)、両構成点の関連付けを行う。又は、基準形状4をモデル形状5の形状とする(908)。
【0078】
基準形状4の構成点とモデル形状5の構成点との関連付け(若しくはモデル形状5の形状への置き換え)ができると、モデル形状5の構成点が有する3次元座標を、これに関連する基準形状4の構成点に付与する(909)。被写崩壊部3bについて、CADなどの作図アプリケーションを利用して出力形状6を作成する。この出力形状6を写真座標系の座標で表し、写真座標系とモデル座標系との空間的な関連からモデル座標系における出力形状6の座標を求める。さらに、数値標高モデルMを基に、出力形状6に空間情報を付与し、被写崩壊部3bの位置や形状を特定する(910)。必要に応じて、既存の地図に崩壊部Bの位置や形状を記載して表示し、崩壊部Bの情報を記した地図を作成する。
【0079】
(システムの機器構成)
図10は、「被写地物の位置特定システム」を構成する機器の配置を示す説明図であり、この図に基づいて、本実施形態における「被写地物の位置特定システム」の機器構成の一例を説明する。
【0080】
図10に示すように、ホストコンピュータ7と、端末コンピュータ8と、数値標高モデルデータベース9が、有線又は無線のネットワークで接続されている。端末コンピュータ8は、カメラ1(デジタルカメラ)から写真2の画像データを読取り、実際に撮影したときの撮影条件値を記憶する。さらに、画像データ内における輝度の違いから被写地物3の境界(エッジ)を自動生成させ、このエッジの構成点に対して同一平面上で2次元座標を付与することで基準形状4を作成する。また、特徴部を入力し、これを基準形状4に反映させることもできる。
【0081】
ホストコンピュータ7は、通信によって端末コンピュータ8から基準形状4や撮影条件値を受け取るとともに、数値標高モデルデータベース9から数値標高モデルMを受け取る。このとき、必要な地域を指定して、当該範囲に限定した数値標高モデルMを数値標高モデルデータベース9から受け取ることもできる。さらにホストコンピュータ7は、図9の実施フローに示す907〜910のステップ(又は、実施形態3で説明する図11の実施フローの1107〜1113ステップ)を実行する。
【0082】
なお図10では、ホストコンピュータ7、端末コンピュータ8、数値標高モデルデータベース9がネットワークで接続されているが、これに限らずホストコンピュータ7と端末コンピュータ8を一体のものとしたり、ホストコンピュータ7と数値標高モデルデータベース9を一体のものとしたり、ホストコンピュータ7と端末コンピュータ8と数値標高モデルデータベース9すべてを一体のものとすることもできる。
【0083】
(実施形態3)
ここでは、「被写地物の位置特定方法とそのプログラム、及び被写地物の表示地図」の第3の実施形態について説明する。本実施形態は、実施形態2においてモデル形状5を作成するための視点及び視角のうちいずれかあるいは全てが未知である場合について説明するものであり、実施形態1や実施形態2と共通する技術内容に関する説明は省略する。
【0084】
被写地物3を撮影した際、カメラ中心位置の座標のみを計測し、撮影姿勢については計測しないこともある。あるいは、撮影姿勢についてのみ計測する場合や、カメラ中心位置の座標と撮影姿勢の両方を計測しない場合も考えられる。このような場合、次のような手順に沿って照合判断を行ってモデル形状5を作成するとよい。すなわち、未知である視点や視角(投影方向と視野角)の値を変数として取り扱い、これらの値を初期値(任意値)から徐々に変化させ、それぞれの視点や視角で計算される形状を「モデル形状候補5’」として作成する。例えば、カメラ中心位置の座標が既知で撮影姿勢が未知の場合には、視点(座標値)を固定して視角を変数として初期値から変化させてそれぞれモデル形状候補5’を作成する。また、カメラ中心位置の座標も撮影姿勢も未知の場合には、視点(座標値)、視角をともに変数として初期値から変化させてそれぞれモデル形状候補5’を作成する。作成されたモデル形状候補5’を基準形状4に照らし合わせ、所定の近似条件に基づいて照合判断を行う。このモデル形状候補5’の算出及び基準形状4との照合判断は、照合したと判断されるまで繰り返し行われ、照合したと判断されたモデル形状候補5’がモデル形状5として抽出される。
【0085】
モデル形状候補5’と基準形状4との照合判断は、両者を重ね合わせる等によって両形状の一致性を判断するものであり、もちろん両形状が完全に一致(合同となる)する場合に限らず、一致と判断し得る程度に両形状が近似している場合も同様に一致した、つまり照合したと判断することができる。一致性の判断(照合判断)を行う場合、次のような手法を例示することができる。すなわち、モデル形状候補5’と基準形状4を最接近配置(実施形態2での説明と同様)において、所定の条件(近似条件)を満足した場合は照合したと、満足しない場合は照合しないと判断する。この近似条件としては、例えば、最接近配置における誤差(絶対値)の総計を閾値以下とする条件や、最接近配置において許容誤差(事前に設定)外にある構成点の点数を閾値以下とする条件、などが挙げられる。あるいは、特徴部(実施形態2の説明と同様で、例えば、図6(a)の尾根部F1、谷部F2、尾根部F3)のみに着目して、その特徴部が前記のような近似条件を満足する場合に照合したとすることもできるし、近似条件を設けずに(無条件として)、最接近配置とした時点で基準形状4とモデル形状候補5’が照合したものとすることもできる。
【0086】
モデル形状候補5’が基準形状4と照合したと判断され、そのモデル形状候補5’がモデル形状5として抽出されると、実施形態2と同様、基準形状4とモデル形状5の構成要素の対応付けが行われ、基準形状4の構成要素に対して数値標高モデルMによる実空間の空間情報が与えられる。さらに、基準形状4の構成点が空間情報を得たことによって、被写地物3のうち基準形状4の対象とならなかった被写地物3(例えば、被写崩壊部3b)に対しても空間情報を付与することができるので、その位置や形状を既存の地図に記載して表示することが可能となるのも実施形態2と同様である。
【0087】
(実施フロー)
本実施形態を実施する手順の例を、図11に示す実施フローについて説明する。
【0088】
その位置や形状を特定したい被写地物(ここでは被写崩壊部3bとする)を含む画像(写真2)を、デジタルカメラなどのカメラ1によって取得する(1101)。このとき、写真撮影したときの撮影条件値(カメラ中心位置の座標)を、トータルステーションなどの計測器を用いて計測しておく。
【0089】
写真2の中に収められた被写地物3の中から、モデル形状5と対応させやすい被写地物3(ここでは被写スカイライン3aとする)を抽出する(1102)。写真2の画像データ内における山と空の輝度の違いから被写スカイライン3aの境界(エッジ)をコンピュータで自動生成させ、このエッジを構成する構成点に対して同一平面上の2次元座標を付与して基準形状4を作成する(1103)。このとき、尾根部F1、谷部F2、尾根部F3、(図6(a))を特徴部として基準形状4に反映させる(1104)こともできる。
【0090】
既存の数値標高モデルMのうち、被写地物3を含む地域を選定する(1105)。数値標高モデルMが広範にわたる場合は、ある程度その範囲を限定することで演算処理にかかる負荷を軽減させることができるからであり、数値標高モデルMの範囲が比較的限定的であれば必ずしも地域を選定する必要はない。
【0091】
モデル形状5を作成するための視点及び視角(投影方向と視野角)を入力する(1106)。なおここでは、撮影条件値のうちカメラ中心位置の座標が既知であるとして、これを視点として入力し、視角については任意の初期値を入力する。
【0092】
地域選定された数値標高モデルMと、入力された視点及び視角と、に基づいて空間演算処理が行われ、2次元の形状であるモデル形状5の候補(つまりモデル形状候補5’)が作成される(1107)。基準形状4とモデル形状候補5’を同一の座標系(2次元)に配置し、さらに最小二乗法などによって基準形状4の構成点とモデル形状5の構成点との誤差(絶対値)が最小となるように両形状を最接近配置の状態とする(1108)。この状態で、近似条件に基づいて照合判断を行い(1109)、近似条件を満たす場合、つまり照合したと判断できる場合は次のステップ(1110)に進む。近似条件を満たさない場合、つまり照合しないと判断される場合は、再度、視点・視角の入力(1106)を行う。ただしこのときは、視点の値はそのままとし、前回の視角の入力値は変更して入力する。このように、基準形状4とモデル形状候補5’が照合するまで、視角の入力(1106)〜照合判断(1109)が繰り返し実施される。
【0093】
基準形状4とモデル形状候補5’が照合すると判断されると、当該モデル形状候補5’をモデル形状5として抽出し(1110)、基準形状4の構成点とモデル形状5の構成点との関連付け(若しくはモデル形状5の形状への置き換え)を行う(1111)。基準形状4の構成点とモデル形状5の構成点との関連付け(若しくはモデル形状5の形状への置き換え)ができると、モデル形状5の構成点が有する3次元座標を、これに関連する基準形状4の構成点に付与する(1112)。次に、被写崩壊部3bについて、CADなどの作図アプリケーションを利用して出力形状6を作成する。この出力形状6を写真座標系の座標で表し、写真座標系とモデル座標系との空間的な関連からモデル座標系における出力形状6の座標を求める。さらに、数値標高モデルMを基に、出力形状6に空間情報を付与し、被写崩壊部3bの位置や形状を特定する(1113)。必要に応じて、既存の地図に崩壊部Bの位置や形状を記載して表示し、崩壊部Bの情報を記した地図を作成する。
【0094】
(システムの機器構成)
本実施形態における「被写地物の位置特定システム」を構成する機器の配置も、実施形態1と同様に図10に示す機器構成とすることができる。
【0095】
(実施形態4)
ここでは、「被写地物の位置特定方法とそのプログラム、及び被写地物の表示地図」の第4の実施形態について説明する。本実施形態は、実施形態2〜3において画像に基づいて基準形状4とモデル形状5を作成する場合について説明するものであり、実施形態1〜3と共通する技術内容に関する説明は省略する。
【0096】
(基準形状)
被写地物3とモデル形状5を対応させるためには、被写地物3をコンピュータで処理できる基準形状4としたうえでモデル形状5と対応させることが望ましく、本実施形態では画像に基づいて基準形状4を作成する。実施形態1〜3と同様、基準形状4は写真2の中に収められた全ての被写地物3に基づいて作成してもよいが、モデル形状5と対応させやすい(つまり数値標高モデルMで表現可能な)地物を被写地物3の中から抽出して作成する方が好適である。本実施形態では、写真2に写された被写地物3の中から被写山部3c(写真2内に写る山の形状、図2)を抽出している。
【0097】
基準形状4は、写真2内のうち被写山部3cを構成する画像(画素の集合)を抽出し、この画像を基準形状4とする。この場合、写真2をモニタで表示して目視で確認しながら被写山部3cの画像を切り出して基準形状4を作成することができる。または、写真2の画像データ内の輝度(あるいは彩度や明度)の違いに基づいて、地物の境界(エッジ)をコンピュータで自動的に認識し、このエッジ内を構成する画素の集合を基準形状4として作成することもできる。
【0098】
(モデル形状)
モデル形状5は、数値標高モデルMとこれに付与されたテクスチャに基づいて作成される。2枚1組のステレオ航空写真や衛星写真を用いてステレオマッチングを行えば、数値標高モデルMに対してその地形に応じた画像(画素の集合)、すなわちテクスチャを与えることができる。あるいは、数値標高モデルMにおける各メッシュの地形量(標高値や傾斜角など)を計算し、その傾斜量に応じた色(色相、彩度、明度)を各メッシュに与えた地形量図を、テクスチャとして数値標高モデルMに付与することもできる。この地形量図としては、光源を与えて作成される陰影図(陰と影を付けた図)や水系図など、種々のものが挙げられる。このようにしてテクスチャ(航空写真や地形量図など)が付与された数値標高モデルMと、実施形態2、3で説明した視点及び視角(投影方向と視野角)に基づいて空間演算を行えば、視点と視角によって投影される地表モデルS上の範囲が特定され、その特定された範囲内の画像を表現することが可能であり、この画像をモデル形状5とする。
【0099】
(基準形状とモデル形状との対応)
画像による基準形状4と、画像によるモデル形状5を作成したら、これらを照らし合わせてそれぞれの画素同士の対応を図る。具体的には、基準形状4とモデル形状5のそれぞれの画素配列に基づいて、基準形状4の画素とモデル形状5の画素を対応させる。このとき、実施形態2、3で説明した手法(被写地物3の外形や特徴部を用いる手法)を組み合わせて行うこともできる。対応する画素同士を照らし合わせて、一致性の判断(照合判断)を行ったうえで、基準形状4の画素に空間情報を付与することもできるが、視点と視角に実際の撮影条件値(カメラ中心位置の座標、撮影姿勢、撮影範囲)を採用した場合など、ある程度基準形状4に近似した状態でモデル形状5を作成することができる場合は、照合判断を省略してそのまま基準形状4の画素に空間情報を付与することもできる。
【0100】
本実施形態における照合判断は、対応する画素同士の属性に基づいて行う。この場合の属性とは色属性のことであるが、本来、色は人の視覚で認識するものであり、個人差が伴うものである。しかしながら、近年この色をコンピュータで扱うべく色属性を数値化させる技術が定着してきた。色属性を数値化する手法にも種々あり、赤(Red)・緑(Green)・青(Blue)の3色を基本色とするRGB、シアン(Cyan)・マゼンタ(Magenta)・イエロー(Yellow)・ブラック(Keycolor)の4色を基本色とするCMYK、黄・赤・青・緑・黒・白の6色を基本色とするNCSやオストワルト表色系などが知られている。本実施形態では、以下、RGBで色属性を数値化した場合について説明するが、本願発明を実施するには他の手法を採用してもよい。
【0101】
ここで、RGBについて簡単に説明する。色は、色相、彩度、明度からなる3つの属性を備えており、RGBは赤・緑・青を基本色としてこの3原色を混ぜ合わせる加法混色により、様々な色の3属性を表現するものである。具体的には、RGBは赤・緑・青をそれぞれの明度で表現するものであって、赤の明度をr、緑の明度をg、青の明度をbとすると、RGBは(r、g、b)で表され、rとgとbの値の組み合わせによって色の3属性を表現することができる。
【0102】
本実施形態における照合判断を具体的に説明すると、以下のとおりである。すなわち、基準形状4とモデル形状5に関して、それぞれ対応する画素ごとにRGBを比較し、事前に設定した近似条件に従って照合の有無を判断する。この近似条件としては、例えば、双方のRGBの較差が許容値内である画素数の比率(前画素数に対する比率)を閾値以上とする条件や、RGBの較差の最大値を閾値以下とする条件、などが挙げられる。このような近似条件の下、基準形状4とモデル形状5を照らし合わせて、この条件を満足した場合は照合したと、満足しない場合は照合しないと判断する。
【0103】
基準形状4とモデル形状5の照合判断を行う場合、視点及び視角の値を初期値(例えば、撮影条件値)から徐々に変化させて繰り返し計算を行う。つまり、それぞれの視点及び視角で計算される形状を「モデル形状候補5’」とし、これを基準形状4と照らし合わせて所定の近似条件に基づき照合判断を行う。この照合判断は、基準形状4とモデル形状候補5’が照合したと判断されるまで繰り返し行われ、照合したと判断されたモデル形状候補5’をモデル形状5として抽出する。
【0104】
このようにして抽出されたモデル形状5(照合判断しない場合も含む)の画素を用いて、これに対応する基準形状4の画素に対して空間情報を付与する。あるいは、実施形態2、3で説明したように、基準形状4の画像(画素の集合)をモデル形状5の画像(画素の集合)に置き換える。モデル形状5を構成する画素は、数値標高モデルMに関連づいたものであるから、それぞれの画素は3次元の座標を含む空間情報(属性情報を含む場合もある)を有しており、このモデル形状5の画素が有する空間情報を、それぞれ対応する基準形状4の画素に付与すれば、基準形状4の画素は空間情報を得ることができる。
【0105】
さらに、基準形状4の画素が空間情報を得たことによって、被写地物3のうち基準形状4の対象とならなかった被写地物3に対しても空間情報を付与することができる。本実施形態でいえば、被写地物3のうち「被写山部3c」を基準形状4の対象としており、被写崩壊部3bは基準形状4の対象としていないが、この被写崩壊部3bに対しても空間情報を付与することができる。
【0106】
空間情報を付与したい被写崩壊部3bについて、基準形状4を作成したのと同様に、画像に基づいて2次元の形状(以下、「出力形状6」という。)を作成する。実施形態2、3と同様に、被写崩壊部3bと被写山部3cの配置関係、さらには被写山部3cとモデル形状5の配置関係から、被写崩壊部3bとモデル形状5の関連付けが行われ、この結果、被写崩壊部3bに対して数値標高モデルMによる実空間の空間情報を付与することができる。つまり、被写崩壊部3bに空間情報が付与され、崩壊部Bの位置や形状を特定することができる。
【0107】
(実施フロー)
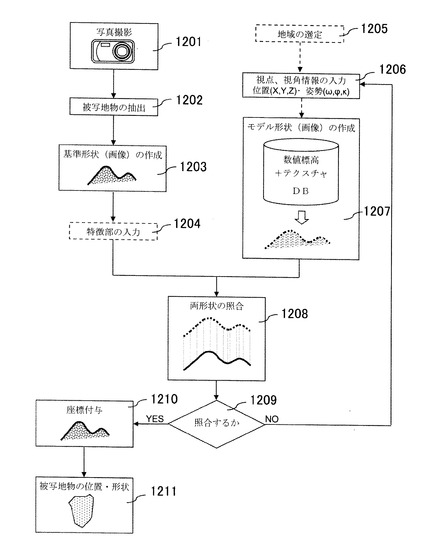
本実施形態を実施する手順は、基準形状4とモデル形状5を作成する手法を除けば実施形態2、3と同様である。ここでは、図12に基づいて、照合判断する場合の実施フローについて説明する。なお、照合判断しない場合の実施フローは図9と同様であるので省略する。
【0108】
その位置や形状を特定したい被写崩壊部3bを含む画像(写真2)を、デジタルカメラなどのカメラ1によって取得する(1201)。このとき、写真撮影したときの撮影条件値(カメラ中心位置の座標、撮影姿勢、撮影範囲)を、GPSやIMUなどの計測器を用いて計測しておく。
【0109】
写真2の中に収められた被写地物3の中から、モデル形状5と対応させやすい被写山部3cを抽出する(1202)。写真2の画像データ内における山と空の輝度の違いから被写スカイライン3aの境界(エッジ)をコンピュータで自動的に認識し、このエッジ内を構成する画素の集合を基準形状4として作成する。(1203)。このとき、尾根部F1、谷部F2、尾根部F3、(図6(a))を特徴部として基準形状4に反映させる(1204)こともできる。
【0110】
既存の数値標高モデルMのうち、被写地物3を含む地域を選定する(1205)。数値標高モデルMが広範にわたる場合は、ある程度その範囲を限定することで演算処理にかかる負荷を軽減させることができるからであり、数値標高モデルMの範囲が比較的限定的であれば必ずしも地域を選定する必要はない。
【0111】
モデル形状5を作成するための視点及び視角(投影方向と視野角)を、撮影条件値(カメラ中心位置の座標、撮影姿勢、撮影範囲)として入力する(1206)。このうち、カメラ中心位置の座標と撮影姿勢については撮影時に計測した値を、撮影範囲についてはカメラ1の諸元(焦点距離や画面距離など)から求めた値を用いる。ここで入力された視点及び視角と、テクスチャが付与された数値標高モデルMと、に基づいて空間演算処理が行われ、視点と視角によって投影される地表モデルS上の範囲が特定され、その特定された範囲内の画像によりモデル形状5の候補(つまりモデル形状候補5’)が作成される(1207)。
【0112】
基準形状4とモデル形状候補5’のそれぞれの画素配列に基づいて、基準形状4の画素とモデル形状候補5’の画素を対応させ(1208)、所定の近似条件に基づいて照合判断を行い(1209)、近似条件を満たす場合、つまり照合したと判断できる場合は次のステップ(1210)に進む。近似条件を満たさない場合、つまり照合しないと判断される場合は、再度、視点・視角の入力(1206)を行う。ただしこのときは、前回値とは変えて視点・視角を入力する。このように、基準形状4とモデル形状候補5’が照合するまで、視点・視角の入力(1206)〜照合判断(1209)が繰り返し実施される。
【0113】
モデル形状5の画素を用いて、これに対応する基準形状4の画素に対して空間情報を付与する(1210)。被写崩壊部3bについても、基準形状の作成(1206)と同様に、出力形状6を作成する。被写崩壊部3bと被写山部3cの配置関係、さらには被写山部3cとモデル形状5の配置関係から、被写崩壊部3bとモデル形状5の関連付けが行われ、この結果、被写崩壊部3bに対して数値標高モデルMによる実空間の空間情報を付与することができる。つまり、被写崩壊部3bに空間情報が付与され、崩壊部Bの位置や形状を特定することができる(1211)。必要に応じて、既存の地図に崩壊部Bの位置や形状を記載して表示し、崩壊部Bの情報を記した地図を作成する。
【0114】
[撮影位置取得方法とそのプログラム、及び撮影位置取得装置の実施形態]
本実施形態は、本願発明の「撮影位置取得方法とそのプログラム、及び撮影位置取得装置」について説明するものである。なお本実施形態は、[被写地物の位置特定方法とそのプログラム、及び被写地物の表示地図の実施形態](実施形態1〜4)において実施する被写地物3への空間情報付与(位置と形状の特定)に代えて、モデル形状5を作成する際の視点及び視角を求める場合について説明するものである。従って、被写地物3への空間情報付与に関すること以外、すなわち[被写地物の位置特定方法とそのプログラム、及び被写地物の表示地図の実施形態]の実施形態1〜4で説明した、単写真2の撮影、被写地物3の抽出、基準形状4の作成、モデル形状5の作成、基準形状4とモデル形状5の照合(照合判断含む)などに関することは、本実施形態でも同様であり、ここでの説明は省略する。なお、本実施形態における基準形状4の作成とモデル形状5の作成は、[被写地物の位置特定方法とそのプログラム、及び被写地物の表示地図の実施形態]の実施形態1〜3で説明した手法(外形に基づく手法)でも、実施形態4で説明した手法(画像に基づく手法)でも構わない。
【0115】
図13は、本願発明の撮影位置取得装置10を用いて、現在撮影している位置を取得している状況を示す説明図である。撮影位置取得装置10はデジタルカメラのような画像取得手段を備えており、図に示す撮影者は市街地の風景を撮影している。ここで撮影した写真2にはホテルDとマンションEが収められており、それぞれ被写ホテル3dと被写マンション3eとして被写地物3を取得している。
【0116】
図13に示す写真2の被写地物3のうち被写ホテル3dと被写マンション3eを抽出し、被写ホテル3dと被写マンション3eについて基準形状4を作成する。この場合における基準形状4の作成は、前記したとおり、[被写地物の位置特定方法とそのプログラム、及び被写地物の表示地図の実施形態]の実施形態1〜3で説明した手法でも、実施形態4で説明した手法でも構わない。
【0117】
ホテルDとマンションEを含む当該市街地は、既に数値標高モデルM(あるいはテクスチャが付与された数値標高モデルM)が作成されており、この数値標高モデルM(あるいはテクスチャが付与された数値標高モデルM)に基づいてモデル形状5を作成する。このときの視点及び視角は不明であるので、所定の初期値(デフォルト値)を採用する。視点及び視角を初期値から徐々に変えながらモデル形状候補5’を計算し、それぞれ基準形状4と照合する。モデル形状候補5’の計算と基準形状4との照合を、近似条件が満足されるまで繰り返し行い、照合判断されたモデル形状候補5’をモデル形状5として抽出する。なおこの場合もモデル形状5の作成は、[被写地物の位置特定方法とそのプログラム、及び被写地物の表示地図の実施形態]の実施形態2、3で説明した手法でも、実施形態4で説明した手法でも構わない。
【0118】
このようにして抽出されたモデル形状5を計算したときに採用された視点及び視角が、写真2を撮影したときの撮影条件値、つまり(カメラ中心位置の座標、撮影姿勢、撮影範囲)と判断することができる。
【0119】
撮影したときに(つまりリアルタイムで)撮影した座標が分かれば、観光旅行者などその土地に不案内な者にとっては極めて便利であり、道に迷うことなく目的地にたどり着くことができる。あるいは、撮影位置取得装置10によって取得した撮影位置情報と連動して、観光案内(例えば、撮影したホテルDの解説)の音声を発生させることもできる。
【0120】
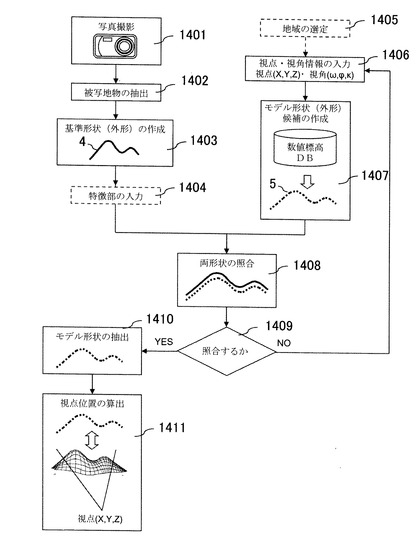
また本実施形態は、撮影したときにリアルタイムで撮影位置情報を取得する場合に限らず、過去に撮影した写真2の撮影位置情報を取得するためにも利用することができる。図14は、写真2の撮影位置情報を取得する場合の実施フローである。
【0121】
過去に撮影された写真2(1401)があり、この写真2にはホテルDとマンションEが収められているものの、どこで撮影されたものかは現在では不明である。写真2の中に収められた被写地物3の中から、被写ホテル3dと被写マンション3eを抽出する(1402)。写真2の画像データ内における建物(ホテルD、マンションE)と空の輝度の違いから被写ホテル3dと被写マンション3eの境界(エッジ)をコンピュータで自動生成させ、このエッジの構成点に対して同一平面上の2次元座標を付与して基準形状4を作成する(1403)。このとき、ホテルDやマンションEの特徴部を基準形状4に反映させる(1404)こともできる。
【0122】
写真2を撮影した概ねの地域が分かる場合は、既存の数値標高モデルMのうち、被写地物3を含む地域を選定する(1405)。数値標高モデルMが広範にわたる場合は、ある程度その範囲を限定することで演算処理にかかる負荷を軽減させることができるからであり、数値標高モデルMの範囲が比較的限定的であれば必ずしも地域を選定する必要はない。
【0123】
モデル形状5を作成するための視点及び視角は不明なので、所定の初期値(デフォルト値)を入力する(1406)。地域選定された数値標高モデルMと、初期値が入力された視点及び視角と、に基づいて空間演算処理が行われ、2次元の形状であるモデル形状5の候補(つまりモデル形状候補5’)が作成される(1407)。基準形状4とモデル形状候補5’を同一の座標系(2次元)に配置し、さらに最小二乗法などによって基準形状4の構成点とモデル形状5の構成点との誤差(絶対値)が最小となるように両形状を最接近配置の状態とする(1408)。この状態で、近似条件に基づいて照合判断を行い(1409)、近似条件を満たす場合、つまり照合したと判断できる場合は次のステップ(1410)に進む。近似条件を満たさない場合、つまり照合しないと判断される場合は、再度、視点・視角の入力(1406)を行う。ただしこのときは、前回値とは変えて視点・視角を入力する。このように、基準形状4とモデル形状候補5’が照合するまで、視点・視角の入力(1406)〜照合判断(1409)が繰り返し実施される。
【0124】
基準形状4とモデル形状候補5’が照合すると判断されると、当該モデル形状候補5’をモデル形状5として抽出する(1410)。ここで抽出されたモデル形状5に対応する視点及び視角、すなわちモデル形状5を計算したときに採用した視点及び視角が、写真2を撮影したときの撮影条件値(カメラ中心位置の座標、撮影姿勢、撮影範囲)であり、これから撮影した位置を特定することができる(1411)。
【0125】
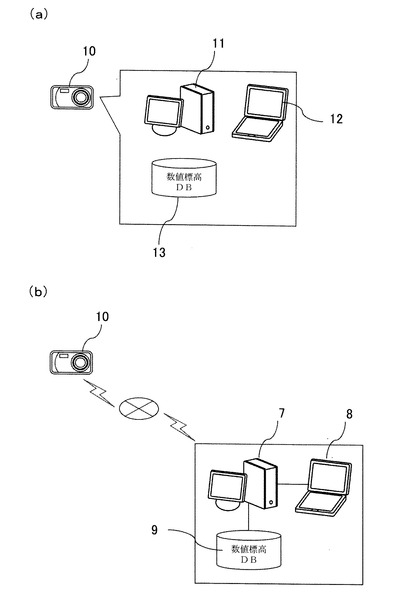
(システムの機器構成)
図15は、「撮影位置取得装置」を構成する機能を示す説明図であり、(a)は全ての機能を一体型とした場合の撮影位置取得装置の説明図であり、(b)は機能を分散型とした場合の撮影位置取得装置の説明図である。
【0126】
図15(a)に示すように、撮影位置取得装置10には、主演算機能11と、基準形状演算機能12と、数値標高モデルデータベース13が、格納されており、さらに写真2を取得し記憶するカメラ機能も備えている。基準形状演算機能12は、カメラ機能で取得した写真2の画像データを読取り、画像データ内における輝度の違いから被写地物3の境界(エッジ)を自動生成させ、このエッジの構成点に対して同一平面上の2次元座標を付与することで基準形状4を作成する。また、特徴部を入力し、これを基準形状4に反映させることもできる。
【0127】
主演算機能11は、基準形状演算機能12で計算した基準形状4を受け取るとともに、数値標高モデルデータベース13から数値標高モデルMを受け取る。このとき、必要な地域を指定して、当該範囲に限定した数値標高モデルMを数値標高モデルデータベース13から受け取ることもできる。さらに主演算機能11は、図14の実施フローに示す1406〜1411のステップを実行する機能を有し、これらを実行することにより写真2の撮影地点を特定する。
【0128】
撮影位置取得装置10は、図15(b)に示すように、カメラ機能と通信機能を有するものとし、無線(あるいは有線)による通信手段によって、ホストコンピュータ7、端末コンピュータ8、数値標高モデルデータベース9と接続する構成とすることもできる。ホストコンピュータ7と、端末コンピュータ8と、数値標高モデルデータベース9もまた、有線又は無線のネットワークで接続されており、これらは撮影現場から離れた場所に設置することもできる。
【0129】
端末コンピュータ8は、通信手段を介して撮影位置取得装置10から写真2の画像データを受け取り、基準形状演算機能12を実行して基準形状4を作成する。ホストコンピュータ7は、ネットワークを介して端末コンピュータ8から基準形状4を受け取り、さらに数値標高モデルデータベース9から数値標高モデルMを受け取る。このとき、必要な地域を指定して、当該範囲に限定した数値標高モデルMを数値標高モデルデータベース9から受け取ることもできる。さらにホストコンピュータ7は、主演算機能11、すなわち図14の実施フローに示す1406〜1411のステップを実行する機能を有し、これらを実行することにより写真2の撮影地点を特定する。
【産業上の利用可能性】
【0130】
被写地物の位置特定方法、撮影位置取得方法、撮影位置取得装置、被写地物の位置特定プログラム、及び被写地物の撮影位置取得プログラムは、人が直接その場所に立ち入ることなく被写地物の位置や形状を把握できるので、特に、被災地のなど人が立ち入ることのできない地物に対して利用するとより効果的である。また、災害に対して迅速に対策を講じることができるので、集落や道路などの機能が速やかに回復させ、産業上利用できるばかりでなく社会的にも大きな貢献を期待し得る発明である。
【符号の説明】
【0131】
1 カメラ
2 写真
3 被写地物
3a 被写スカイライン
3b 被写崩壊部
3c 被写山部
3d 被写ホテル
3e 被写マンション3e
4 基準形状
4_n基準形状の構成点
5 モデル形状
5’ モデル形状候補
5_nモデル形状の構成点
6 出力形状
7 ホストコンピュータ
8 端末コンピュータ
9 数値標高モデルデータベース
10 撮影位置取得装置
11 主演算機能
12 基準形状演算機能
13 数値標高モデルデータベース
A 山の稜線(スカイライン)
B 崩壊部
D ホテル
E マンション
F1 特徴部(尾根部)
F2 特徴部(谷部)
F3 特徴部(尾根部)
G モデル画像面
Gr 地形
L レーザー
M 数値標高モデル
P 航空機
Ph カメラ画像面
S 地表モデル
X 実空間におけるx軸
Y 実空間におけるy軸
Z 実空間におけるz軸
xa 写真座標系におけるx軸
ya 写真座標系におけるy軸
xa モデル座標系におけるx軸
ya モデル座標系におけるy軸
【技術分野】
【0001】
本願発明は、撮影した写真に写る被写地物の位置を特定する方法とプログラム、表示地図、及び写真を撮影した地点を特定する方法とそのプログラムと装置に関するものである。
【背景技術】
【0002】
我が国は地震が頻発する国として知られ、近年でも兵庫県南部地震や、新潟県中越地震など大きな地震が発生し、そのたびに甚大な被害を被っている。また、台風による被害もほぼ毎年のように発生しており、さらに昨今では、突発的に生ずる豪雨によって種々の被害を受けることがある。これら自然災害は、斜面崩壊を引き起こすことが多く、場合によっては地すべりの誘因となることもある。
【0003】
斜面崩壊や地すべり(以下、「斜面崩壊等」という。)は、直下にある集落、道路、河川、砂防施設に対して被害を与えるものであり、植林や樹木を倒し森林資源を滅失させるとともに自然環境に対して影響を与えるものである。斜面崩壊等の災害によって集落や道路などが被害を受けると、これらの機能を復旧すべく速やかに対策が施される。
【0004】
対策工の計画、設計を実施するためには、斜面崩壊等による被災位置や被災規模(崩壊した形状や大きさなど)をできるだけ正確に把握する必要がある。一方で、斜面崩壊等は2次災害のおそれもあり、災害後直ちに被災地に近寄ることはできない。従来では、安全の確認を待ったうえで、測量技師がトータルステーションなどの測量機器を携えて被災地に入り、被災位置や被災規模を計測していた。被災規模が大きな場合や、その被害による社会的影響が大きい場合など、航空機によるステレオ写真撮影を用いて被災位置や被災規模を把握することもあるが、写真撮影のための飛行は天候に左右されることもあり、機動性に欠けるうえその手間や費用も大掛かりとなってしまう。
【0005】
前述のとおり、斜面崩壊等の災害に対しては迅速に復旧対策を実施する必要があり、そのためには可能な限り速やかに被災位置や被災規模を把握しなければならない。しかしながら、トータルステーションなど測量機器による計測方法は、被災地の安全確認のため計測までに所定期間を要し迅速性に欠けるうえ、被災地に進入する危険と機器等の運搬のための過酷な労力を測量技師に要求していた。また、航空機によるステレオ写真撮影を用いる方法は、天候に左右されるなど機動性に欠けるとともに手間や費用がかかるうえ、被災地周辺に計測点を設置する必要があることから、やはり被災地の安全確認のための期間を要し迅速性にも欠けるものである。
【0006】
このように、被災位置や被災規模を把握する従来手法は種々問題を抱えていることから、測量技師など人が被災地に立ち入ることなく、しかも斜面崩壊等の災害発生後速やかに被災位置や被災規模を把握する手法が待望されていた。本願発明は、この期待に応えるべくなされたもので、デジタルカメラ等で撮影した写真と数値標高モデルを利用した発明である。
【0007】
撮影写真と数値標高モデルを用いて被災地などの位置を特定する技術に関してはこれまで提案されていないものの、本願発明でも一部利用している「数値標高モデルを任意視点から見た地形を用いた技術」についてはいくつか提案されている。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】国際公開公報WO2006/134962
【特許文献2】特開平05−46080
【発明の概要】
【発明が解決しようとする課題】
【0009】
特許文献1の投影図生成システムは、カーナビゲーションなどに利用されるもので、ある視点から3次元地形モデルを見たときの2次元投影面を表示するとともに、進行先の道路が遮蔽物によって隠れる場合にはこの遮蔽物を取り除いて表示するものである。
【0010】
特許文献2の透視図作成装置は、任意視点から3次元のデジタル位置データを見た投影面を透視図として表示するものであり、航行中の飛行機に搭載した場合など高速で視点位置が移動しても、その速度に対応した処理を行いリアルタイムで透視図を表示するものである。
【0011】
特許文献1や特許文献2のように、数値標高モデル(3次元の地形モデル)を任意の視点から見た投影面(あるいは透視面、以下「投影面」で統一する)を作成し、この投影面を利用する技術は、従来から様々な分野で利用されている。本願発明もこの任意視点からの投影面を利用するものであり、撮影された写真と照らし合わせることで写真中の地物位置が特定できることに着目してなされた発明である。
【0012】
さらに、投影面と写真中の地物を照合させると、その投影面の視点位置である写真撮影位置も特定できる。過去に撮影した写真がどこで撮影したものかを確認したい場合、あるいは観光地など不案内な場所で現在位置を把握したい場合など、撮影した写真によって、あるいは写真を撮影することによって写真撮影位置を特定できる技術はこれまで提案されることがなかった。
【0013】
本願発明の課題は、測量技師など人が被災地に立ち入ることなく地物位置(例えば、被災位置)や地物形状(例えば、被災規模)を把握する方法とそのプログラム及びその位置を表示した地図を提供するとともに、撮影した写真によって写真撮影位置を特定できる方法と装置とそのプログラムを提供することにある。
【課題を解決するための手段】
【0014】
本願発明の被写地物の位置特定方法は、数地標高モデルに基づいて、写真に写された被写地物の位置又は/及び形状を特定する方法であって、前記被写地物の形状から4点以上の特徴点を選出するとともに、これら特徴点に対して、写真平面内の任意座標系による座標を付与し、前記数値標高モデルに基づく地表モデルを投影したモデル形状から前記特徴点に相当する点を4点以上選出するとともに、これら特徴点に相当する点に対して、モデル形状を表す平面内の任意座標系の座標を付与し、前記被写地物の特徴点と、前記モデル形状の特徴点に相当する点とを対応させることで、写真平面内の任意座標系と、モデル形状を表す平面内の任意座標系とを関連づけ、前記数値標高モデルに基づいて、前記被写地物に空間情報を付与し、当該被写地物の位置又は/及び形状を特定する方法である。
【0015】
本願発明の被写地物の位置特定方法は、数値標高モデルに基づいて、写真に写された被写地物の位置又は/及び形状を特定する方法であって、前記被写地物の一部又は全部の形状に基づいて2次元の基準形状を作成するとともに、写真平面内の任意座標系により基準形状に座標を付与し、前記数値標高モデルに基づく地表モデルを投影した2次元のモデル形状を作成するとともに、このモデル形状を表す平面内の任意座標系によりモデル形状に座標を付与し、前記基準形状の構成要素と、前記モデル形状の構成要素とを対応させることで、写真平面内の任意座標系と、モデル形状を表す平面内の任意座標系と、を関連づけ、前記数値標高モデルに基づいて、前記被写地物に空間情報を付与し、当該被写地物の位置又は/及び形状を特定する方法とすることもできる。
【0016】
本願発明の被写地物の位置特定方法は、数値標高モデルに基づいて、写真に写された被写地物の位置又は/及び形状を特定する方法であって、前記被写地物の一部又は全部の画像に基づいて2次元の基準形状を作成するとともに、写真平面内の任意座標系により基準形状を構成する画素に座標を付与し、画像が付与された数値標高モデルに基づく地表モデルを投影した投影画像から、2次元のモデル形状を作成するとともに、このモデル形状を表す平面内の任意座標系によりモデル形状を構成する画素に座標を付与し、前記基準形状の画素と、前記モデル形状の画素とを対応させることで、写真平面内の任意座標系と、モデル形状を表す平面内の任意座標系とを関連づけ、前記数値標高モデルに基づいて、前記被写地物に空間情報を付与し、当該被写地物の位置又は/及び形状を特定する方法とすることもできる。
【0017】
本願発明の被写地物の位置特定方法は、請求項2又は請求項3記載の被写地物の位置特定方法において、地表モデルを投影するための視点及び視角を変えることによって、複数の地表モデルを投影した形状をモデル形状候補として作成し、前記モデル形状候補と基準形状を照合することによって、複数のモデル形状候補の中から基準形状に相当するものをモデル形状とすることもできる。
【0018】
本願発明の被写地物の表示地図は、数値標高モデルに基づいて、写真に写された被写地物の位置又は/及び形状が表示された地図であって、請求項1乃至請求項4記載の被写地物の位置特定方法によって、位置又は/及び形状が特定された被写地物が、表示されたものである。
【0019】
本願発明の被写地物の位置特定プログラムは、写真に写された被写地物の位置又は/及び形状を、数値標高モデルに基づいて特定するプログラムであって、請求項1乃至請求項4記載の被写地物の位置特定方法を、電子計算機(以下、「コンピュータ」という。)に実行させるものである。
【0020】
本願発明の撮影位置取得方法は、写真に写された被写地物、及び数値標高モデルに基づいて、被写地物を撮影した地点を取得する方法であって、前記被写地物の一部又は全部の形状に基づいて2次元の基準形状を作成するとともに、写真平面内の任意座標系により基準形状に座標を付与し、前記数値標高モデルに基づく地表モデルを投影するための視点及び視角を変えることによって、複数の地表モデルを投影した2次元の形状をモデル形状候補として作成するとともに、これらモデル形状候補を表す平面内の任意座標系によりモデル形状候補に座標を付与し、前記モデル形状候補と基準形状を照合することによって、複数のモデル形状候補の中から基準形状に相当するものをモデル形状として抽出し、前記抽出されたモデル形状に対応する視点を被写地物の撮影地点とする方法である。
【0021】
本願発明の撮影位置取得方法は、写真に写された被写地物、及び数値標高モデルに基づいて、被写地物を撮影した地点を取得する方法であって、前記被写地物の一部又は全部の画像に基づいて2次元の基準形状を作成するとともに、写真平面内の任意座標系により基準形状を構成する画素に座標を付与し、前記数値標高モデルに基づく地表モデルを投影するための視点及び視角を変えることによって、複数の地表モデルを投影した投影画像から、複数の2次元の形状をモデル形状候補として作成するとともに、これらモデル形状候補を表す平面内の任意座標系によりモデル形状を構成する画素に座標を付与し、前記モデル形状候補と基準形状を照合することによって、複数のモデル形状候補の中から基準形状に相当するものをモデル形状として抽出し、前記抽出されたモデル形状に対応する視点を被写地物の撮影地点とする方法とすることもできる。
【0022】
本願発明の撮影位置取得プログラムは、写真に写された被写地物、及び数値標高モデルに基づいて、被写地物を撮影した地点の位置情報を取得するプログラムであって、請求項7又は請求項8記載の撮影位置取得方法を、コンピュータに実行させるものである。
【0023】
本願発明の被写地物の撮影位置取得装置は、写真に写された被写地物、及び数値標高モデルに基づいて、被写地物を撮影した地点の位置情報を取得する装置であって、被写地物を撮影し、この画像データを取得する手段と、前記画像データから、請求項7又は請求項8記載の基準形状を作成する手段と、請求項7又は請求項8記載の複数のモデル形状候補を作成する手段と、前記モデル形状と基準形状を照合することによって、複数のモデル形状の中から基準形状に相当するものをモデル形状として抽出する手段と、前記抽出されたモデル形状に対応する視点を被写地物の撮影地点とする手段と、を備えたものである。
【発明の効果】
【0024】
本願発明の被写地物の位置特定方法とそのプログラム、及び表示地図には、次のような効果がある。
(1)現地で実施するのは被写地物の撮影だけであり、極めて容易に被写地物の位置や形状を把握することができる。
(2)例えば斜面崩壊等の位置や形状を把握する場合、被災地に人が立ち入ることがないので安全であり、しかも災害後直ちに位置や形状を把握できるので速やかに対策工を実施することができる。
【0025】
本願発明の撮影位置取得方法とそのプログラム、及び撮影位置取得装置には、次のような効果がある。
(1)過去に撮影した写真についてその撮影場所を特定することができるので、その写真の情報価値が高まる。
(2)写真を撮影するだけで現在位置を特定することができるので、観光地など不案内な場所でも的確に目的地へ移動することができる。
【図面の簡単な説明】
【0026】
【図1】航空レーザー計測を説明する説明図。
【図2】斜面の崩壊を撮影している状況を説明するための説明図。
【図3】(a)は「被写地物を撮影している状況」を側方から見たモデル図、(b)はカメラ画像面に映し出された画像を示す説明図。
【図4】(a)は数値標高モデルをモデル画像面に投影させた状況を示す説明図、(b)はモデル画像面に投影された画像を示す説明図。
【図5】2次元の射影変換によって基準形状とモデル形状を対応させる場合の実施フロー図。
【図6】(a)は被写地物から抽出される基準形状を説明するモデル図、(b)は数値標高モデルを基に作成されるモデル形状を説明するモデル図、(c)は基準形状とモデル形状を照らし合わせた状態を説明するモデル図。
【図7】モデル形状を作成する概念を示す説明図。
【図8】基準形状の構成点とモデル形状の構成点との対応を図る概念を示す説明図。
【図9】照合判断を行わずに基準形状に対して空間情報を付与する場合の実施フロー図。
【図10】「被写地物の位置特定システム」を構成する機器の配置を示す説明図。
【図11】照合判断を行ったうえで基準形状に対して空間情報を付与する場合の実施フロー図。
【図12】画像を基に基準形状とモデル形状を作成する場合であって、照合判断を伴う場合の実施フロー図。
【図13】撮影位置取得装置を用いて、撮影している位置を取得している状況を示す説明図。
【図14】写真の撮影位置情報を取得する場合の実施フロー図。
【図15】(a)は「撮影位置取得装置」を構成する機能を示すもので、全ての機能を一体型とした場合の説明図、(b)は「撮影位置取得装置」を構成する機能を示すもので、機能を分散型とした場合の説明図。
【発明を実施するための形態】
【0027】
本願発明の被写地物の位置特定方法とそのプログラム、及び表示地図、並びに撮影位置取得方法とそのプログラム、及び撮影位置取得装置の実施形態の例を図に基づいて説明する。
【0028】
昨今、航空レーザー計測などの出現によって地形情報を大量に取得する計測手法が著しく高度化し、また、コンピュータの進化に伴い地形情報を扱う技術も飛躍的に進歩してきた。航空レーザー計測は、図1に示すように、計測したい地形Grの上空を航空機Pで飛行し、飛行中に地形Grに対して照射したレーザーLの反射を受けて計測するものである。この航空レーザー計測によれば、地形をあらわす情報として無数の3次元点群データ(X,Y,Z)を密に取得することが可能となり、さらにこの点群データをコンピュータで処理すれば、地形を立体的にモデル化することもできる。
【0029】
(数値標高モデルM)
3次元点群データにより構成されたモデルは「数値標高モデルM」(図4(a)、(b))と呼ばれ、代表的なものとしてはDEM(Digital Elevation Model)やDSM(Digital Surface Model)が挙げられる。もちろん、本願発明ではこれに限らず従来から用いられる種々の数値標高モデルMを利用することができる。また、本願発明の実施に当たっては、既存の数値標高モデルMを利用することが望ましいが、既存のものがなければ新たに数値標高モデルMを作成しこれを利用することができる。
【0030】
ここで、代表的な数値標高モデルMであるDEMについて簡単に説明する。DEMとは、地表面の形状である地形を数値モデル化したもので一般的には格子モデルである。DEMは、地表面の平面座標(X,Y)と標高値(Z)を有する点の集合であるいわゆる点群データに基づいて形成され、点群データが密であるほど正確に原地形を再現することができる。この点群データは、航空レーザー計測によって取得することが一般的である。もちろん、航空レーザー計測によるほか、ステレオの航空写真や衛星写真を基に三次元の空間情報をもつ点群データを生成してもよいし、直接現地を測量して三次元の空間情報をもつ点群データを取得してもよい。なお航空レーザー計測によって点群データを取得する場合、樹木頂部など地表面ではない計測データを取り除くいわゆるフィルタリング処理を施して、地表面の点群データとするのが一般的である。
【0031】
航空レーザー計測によって取得される点群データは、ランダムに計測されたレーザー計測点の集合にすぎず、DEMは以下の手順で作成される。すなわち、レーザー計測点が配点された上に、所定間隔(例えば2m)に配置された複数のグリッド(例えば正方格子)を被せる。この正方格子で区切られることにより格子点が生成され、多数の四角形(メッシュ)が形成される。メッシュには一つの代表点が設けられるが、その代表点の位置はメッシュの中心としたり、メッシュのうち右上隅の格子点としたり、状況に応じて適宜設定される。
【0032】
レーザー計測点の三次元座標(X,Y,Z)を基に、メッシュ代表点の平面座標(X,Y)と標高値(Z)を算出し、DEMを完成させる。この算出方法は、レーザー計測点から不整三角網より高さを求めるTIN(Triangulated Irregular Network)による補間法のほか、最も近いレーザー計測点を採用する最近隣法(Nearest Neibor)や、逆距離加重法(IWD)、Kriging法、平均法など種々の方法が採用される。
【0033】
数値標高モデルMは、国をはじめ各地方自治体では所管地域における数値標高モデルMの整備が推し進められている。また民間事業者のなかではライブラリ形式で数値標高モデルMを保有しているところもあって、近年では数値標高モデルMが身近で利用しやすいものとなっている。本願発明は、上記のように我が国全体で数値標高モデルMが蓄積されてきたことを背景になされたものであり、『写真に写された物の形状と、数値標高モデルMから計算されたモデル形状(2次元)とを照らし合わせることによって、必要な空間情報を取得する』、という技術的特徴を備えたものである。以下に説明する種々の実施形態は、共通してこの技術的特徴を備えるものであるが、便宜上、「被写地物の位置特定方法とそのプログラム、及び被写地物の表示地図」の実施形態と、「撮影位置取得方法とそのプログラム、及び撮影位置取得装置」の実施形態を分けて説明する。
【0034】
[被写地物の位置特定方法とそのプログラム、及び被写地物の表示地図の実施形態]
本実施形態は、本願発明の「被写地物の位置特定方法とそのプログラム、及び被写地物の表示地図」について説明するものである。なおここでは、「写真に写された物」を山の稜線A(以下、「スカイラインA」という。)や崩壊部B(図2)といった地物として説明しているが、これはあくまで説明のための一例であり、「写真に写された物」が他のあらゆる物(地物)であっても本願発明を実施できることはいうまでもない。
【0035】
図2は、斜面の崩壊を撮影している状況を説明するための説明図である。この図に示すように、この山の斜面には崩壊による被害が生じており、その崩壊部Bは目視により確認することができる。この被災地(斜面が崩壊した現場)から少し離れた位置に立った撮影者がカメラ1によって撮影したものが写真2であり、写真2にはスカイラインAと崩壊部Bを含む地物が収められている。ここでは、写真2に写されたスカイラインAを「被写スカイライン3a」、写真2に写された崩壊部Bを「被写崩壊部3b」と呼ぶこととし、これら「被写スカイライン3a」や「被写崩壊部3b」など写真2に写された地物の総称を「被写地物3」という。なお写真2は、地上から人が撮影して取得したものに限らず、航空機などの移動体で移動しながら撮影したものでもよい。
【0036】
(実施形態1)
ここでは、「被写地物の位置特定方法とそのプログラム、及び被写地物の表示地図」の第1の実施形態について説明する。本実施形態は、写真画像内の被写地物3から基準形状を作成し、これとは別に数値標高モデルMを基にモデル形状を作成し、基準形状を構成する点から4点以上の特徴点を抽出するとともに、これら特徴点とモデル形状の構成点とを対応させることによって、基準形状とモデル形状を照らし合わせる、という手法について説明するものである。つまり、一枚の写真2(単写真)と一つのモデル形状5を対応させることで地物に座標を付与できるのが本願発明の特徴であり、2枚1組の写真を用いて座標を付与する従来方式(ステレオマッチング方式)とは、この点において著しく異なる。
【0037】
(基準形状)
図3(a)は、図2に示す「被写地物3を撮影している状況」を側方から見たモデル図であり、カメラ1で山の正面からの像を写し取った状況を示す説明図である。また、図2に示すように実空間の座標軸をX軸、Y軸、Z軸とすると、図2をY−Z面で切り取ったものが図3(a)である。図3(a)に示すように、いま対象物である山をカメラ1で撮影しており、その撮影した画像がカメラ画像面Phに写し出されている。このカメラ1の中心位置(以下、「視点」という。)の座標は、実空間座標系で(X0,Y0,Z0)で表され、カメラ1の傾き(以下、「撮影姿勢」という。)は、それぞれX軸回りの傾きがω(ピッチ)、Y軸回りの傾きがφ(ロール)、Z軸回りの傾きがκ(ヨー)となっている。なお、カメラ1の空間的な配置を決定する(X0,Y0,Z0)及び(ω,φ,κ)は、外部標定要素と呼ばれる。
【0038】
図3(b)は、図3(a)に示すカメラ画像面Phに映し出された画像であって、写真2に写された画像である。この画像内にある地物(物)の中から抽出されるのが基準形状4である。この場合、写真2の中に収められた全ての被写地物3に基づいて基準形状4を作成してもよいが、後に説明するモデル形状5(図6(b))と対応させるため、モデル形状5と対応させやすい(つまり数値標高モデルMで表現可能な)地物を抽出して基準形状4を作成することもできる。本実施形態では、写真2に写された被写地物3の中から被写スカイライン3aを基準形状4として抽出している。
【0039】
基準形状4は、CADなどの作図アプリケーションを利用して被写スカイライン3aをトレースするように作図することができる。あるいは、写真2の画像データを利用し、画像データ内の空と山の輝度(あるいは色相や彩度や明度)の違いから、スカイラインAをエッジとしてコンピュータで自動生成させ、このエッジを利用して基準形状4を作成することもできる。このように作成された基準形状4は2次元の形状であり、この形状を構成する幾何学的要素(点、線分、面など)には、カメラ画像面Ph(写真2)内における任意の座標系(xa,ya)の座標で表すことができる。以下、このカメラ画像面Ph内における任意座標系を写真座標系という。また、基準形状4を構成する点の中から、その形状を特徴づける構成点を4点以上選出してこれらを特徴点とする。図3(b)では、特徴点A1〜特徴点A5の5点が抽出されている。
【0040】
(モデル形状)
図4(a)は、数値標高モデルMをモデル画像面Gに投影させた状況を示す説明図である。なおこの図は、数値標高モデルMを基に立体的な地形モデルを作成し、さらにその断面図を示したものであり、図3(a)と同様、図2を実空間座標系のY−Z面で切り取ったものである。この数値標高モデルMによる立体的な地形モデルを、2次元に投影するための平面が図4(a)に示すモデル画像面Gである。なおこの図では便宜上、モデル画像面Gを、Z軸に平行(つまり鉛直面)で、かつX軸に平行に配置しているが、これに限らず任意の方向にモデル画像面Gを傾けても構わない。
【0041】
図4(b)は、図4(a)に示すモデル画像面Gに投影された画像である。この画像内にある地物(物)の中から抽出されるのがモデル形状5である。モデル形状5は2次元の形状であり、この形状を構成する幾何学的要素(点、線分、面など)には、モデル画像面G内における任意の座標系(xb,yb)の座標で表すことができる。以下、このモデル画像面G内における任意座標系をモデル座標系という。
【0042】
モデル形状5を抽出する際は、基準形状4の構成点から選出した特徴点に相当する点が少なくとも4点以上含まれるように抽出する(図4(b)ではA’1〜A’5)。これは、後に説明するように基準形状4の特徴点と、モデル形状5の特徴点(に相当する点)とを対応させる必要があるからである。そのため、カメラ1の視点(X0,Y0,Z0)と、カメラ1のZ軸回りの傾きκ(つまり方位)は、既知であることが望ましい。通常、数値標高モデルMは広範囲に作成されていることが多く、その中から何ら手がかりもない状態で基準形状4の特徴点を含むモデル形状5を抽出することは、著しく時間と手間を要するからである。なお、基準形状4の特徴点に相当する点を選出するには、例えば目視等によって判断することができる。
【0043】
(基準形状とモデル形状との対応)
図4(b)に示すように、モデル画像面G内におけるモデル形状5の構成要素(構成点など)はモデル座標系(xb,yb)によって2次元の座標が付与され、図4(a)から分かるように、モデル形状5の各構成要素は数値標高モデルMの空間座標と対応している。すなわち、モデル形状5の構成要素は数値標高モデルMの空間座標と紐づいており、言い換えればモデル形状5の構成要素は実空間における3次元座標を有している。
【0044】
一方、カメラ画像面Ph内の基準形状4は、数値標高モデルMなど既知の空間座標を有するものと対応していないので、カメラ1で撮影しただけでは基準形状4の構成要素を実空間の3次元座標で表すことができない。そこで、基準形状4の特徴点A1〜A5とモデル形状5の特徴点に相当する点A’1〜A’5とを対応させることによって、基準形状4の構成要素に実空間の3次元座標を付与する。
【0045】
基準形状4は同一平面上に表された2次元の形状であり、モデル形状5も同様に同一平面上に表された2次元の形状であるから、2次元の射影変換式を用いることができる。すなわち、基準形状4の特徴点を射影変換したものが、モデル形状5の特徴点に相当する点とすれば、両者の座標系、つまり「写真座標系(xa,ya)」と「モデル座標系(xb,yb)」は空間的に関連付けることができる。なお、2次元の射影変換式は次式で与えられる。
【0046】
【数1】
ここで、
xa : 写真座標系における特徴点のx座標
ya : 写真座標系における特徴点のy座標
xb : モデル座標系における特徴点のx座標
yb : モデル座標系における特徴点のy座標
【0047】
この2式には8つの未知数b1〜b8があり、これら未知数の解を得るためには計8つの式が必要となる。つまり基準形状4の特徴点が4点、モデル形状5の特徴点に相当する点が4点、既知でなければならない。基準形状4とモデル形状5それぞれに、特徴点(特徴点に相当する点)を4点以上必要としたのは、2次元の射影変換式の未知数の解を得るためである。なお、既知点がちょうど4点のときは8元1次方程式を解くことで一の解が得られるが、5点以上既知である場合は最小次乗法によって解を得ることができる。
【0048】
このようにして8つの未知数b1〜b8が求められると、「写真座標系(xa,ya)」と「モデル座標系(xb,yb)」は空間的に関連付けられる。つまり、前記した2次元の射影変換式を用いれば、カメラ画像面Ph内に配置された任意の点(つまり写真座標系で座標があてられる任意点)を、モデル画像面G内に配置することができる。このことは、カメラ画像面Ph内の任意点が、モデル座標系の2次元座標を得ることであり、つまり、数値標高モデルMの空間座標(3次元座標)と紐づけられることを意味する。換言すれば、写真座標系で表される基準形状4をモデル座標系で表現することによって、基準形状4に実空間の3次元座標を付与することができる。なお、カメラ画像面Phに基づく基準形状4をモデル画像で表現した形状は、理論上は、モデル画像面G内に表現されたモデル形状5(図4(b)内の破線形状)と一致するはずであるが、数値標高モデルMの作成精度等の理由から必ずしも一致するとは限らない。
【0049】
また基準形状4と同様、図3(b)に示す被写崩壊部3bに関しても、3次元の空間座標を付与することができる。その手順を以下に示す。カメラ画像面Ph内に表示された被写崩壊部3bを、基準形状4と同様の手法によって出力形状6として作成する。この出力形状6の構成要素(構成点など)は、写真座標系(xa,ya)によって2次元の座標が付与され、2次元の射影変換式を用いればモデル座標系(xb,yb)に変換することができる。このようにして出力形状6の構成要素は、モデル座標系の座標と関連づき、その結果、実空間の3次元座標を付与することができる。すなわち、現実に存在する崩壊部Bの位置や形状、大きさを特定することができる。
【0050】
(地図の作成)
崩壊部Bの位置や形状を特定することができると、既存の地図に記載して表示することが可能となり、崩壊部Bの情報を記した新たな地図を作成することができる。もちろん既存の地図に表示する場合に限らず、他の空間情報も加えて、崩壊部Bの位置や形状を記した新たな地図を作成することもできる。このように、崩壊部Bから十分離れて撮影するだけで地図上にプロットすることができるので、容易かつ安全に崩壊部Bを表示した地図を得ることができる。
【0051】
(実施フロー)
本実施形態を実施する手順の例を、図5に示す実施フローについて説明する。
【0052】
その位置や形状を特定したい地物(ここでは崩壊部Bとする)を含む画像(写真2)を、デジタルカメラなどのカメラ1によって取得する(501)。このとき、写真撮影したときの撮影情報(視点座標、撮影方位)を、GPSや電子コンパスなどの計測器を用いて計測しておく。
【0053】
写真2(つまりカメラ画像面Ph)の中に収められた被写地物3の中から、特徴ある部分を有する被写地物3(ここでは被写スカイライン3aとする)を抽出する。写真2の画像データ内における山と空の輝度の違いから被写スカイライン3aの境界(エッジ)をコンピュータで自動生成させ、このエッジを利用して基準形状4を作成する(502)。次に、基準形状4を構成する点の中からその形状を特徴づける特徴点を4点以上選出し、これらに写真座標系(xa,ya)の座標を付与する(503)。
【0054】
モデル形状5を作成するための撮影情報(視点座標、撮影方位)を入力する(504)。この入力値と既存の数値標高モデルMに基づいて、モデル画像面Gに平面投影させてモデル形状5を作成する(505)。次に、モデル形状5の中から、基準形状4の特徴点に相当する点を4点以上抽出する(506)。なお、ここで特徴点に相当する点を4点以上抽出できない場合は、作成範囲を変えて再度モデル形状5を作成する。
【0055】
基準形状4の特徴点(4点以上)と、モデル形状5の特徴点相当点(4点以上)に基づいて、2次元の射影変換を行い「写真座標系(xa,ya)」と「モデル座標系(xb,yb)」を関連付ける(507)。これにより、基準形状4(被写スカイライン3a)と被写崩壊部3bをモデル座標系(xb,yb)に変換することが可能となり、数値標高モデルMの空間座標と関連付けることが可能となる(508)。崩壊部Bが実空間上で特定できると、既存の地図にこれを記載し、崩壊部Bの情報を記した地図を作成する(509)。
【0056】
(実施形態2)
ここでは、「被写地物の位置特定方法とそのプログラム、及び被写地物の表示地図」の第2の実施形態について説明する。本実施形態は、実施形態1の特徴点の抽出による射影変換に代えて、直接的に基準形状4とモデル形状5との対応を図る場合について説明するものであり、実施形態1と共通する技術内容に関する説明は省略する。
【0057】
(基準形状)
図6(a)は被写地物3から抽出される基準形状4を説明するモデル図、図6(b)は数値標高モデルMを基に作成されるモデル形状5を説明するモデル図、図6(c)は基準形状4とモデル形状5を照らし合わせた状態を説明するモデル図である。図2で撮影した写真2の中に収められた被写地物3は、数値標高モデルMを基に作成されるモデル形状5と直接対応させることによって空間情報を付与することができる。つまり、一枚の写真2(単写真)と一つのモデル形状5を対応させることで地物に座標を付与できるのが本願発明の特徴であり、2枚1組の写真を用いて座標を付与する従来方式(ステレオマッチング方式)とは、この点において著しく異なる。
【0058】
被写地物3とモデル形状5を対応させる場合、直接的に(例えば目視により)行うのではなく、被写地物3をコンピュータで処理できる基準形状4としたうえでモデル形状5と対応させることが望ましい。また、モデル形状5と対応させる基準形状4は、写真2の中に収められた全ての被写地物3に基づいて作成してもよいが、モデル形状5と対応させやすい(つまり数値標高モデルMで表現可能な)地物を被写地物3の中から抽出して作成する方が好適である。本実施形態では、写真2に写された被写地物3の中から被写スカイライン3aを抽出している。
【0059】
基準形状4は、CADなどの作図アプリケーションを利用して被写スカイライン3aをトレースするように作図することができる。あるいは、写真2の画像データを利用し、画像データ内の空と山の輝度(あるいは色相や彩度や明度)の違いから、スカイラインAをエッジとしてコンピュータで自動生成させ、このエッジを利用して基準形状4を作成することもできる。このように作成された基準形状4は2次元の形状であり、この形状を構成する幾何学的要素(点、線分、面など)は、写真2内における任意の座標系(xa,ya)の座標で表すことができる。以下、この写真2内における任意座標系を写真座標系という。また、基準形状4を構成する点の中から、その形状を特徴づける部分(以下、「特徴部」という。)を選出しておくこともできる。この特徴部としては、特徴ある点(例えば、山の頂点や谷部の変化点)に限らず、線分の曲率といった局所的に特徴を持つ部分を選出することができる。なお、図6(a)では特徴部として尾根部F1、谷部F2、尾根部F3の3箇所が選出されている。
【0060】
(モデル形状)
図7は、モデル形状5を作成する概念を示す説明図である。モデル形状5は、数値標高モデルMを基に空間演算することで作成される2次元の形状であり、基準形状4と対応させるものである。前記のとおり数値標高モデルMは3次元の空間座標を備えているため、図7に示すように、立体的な地形モデルを作成することが可能であり、換言すれば仮想の地形表面(以下、「地表モデルS」という。)を再現することができる。この地表モデルSを任意地点から投影して作成される投影地形(2次元形状)が、モデル形状5である。つまり、仮に地表モデルSを任意地点からカメラ撮影したとすれば得られるはずの地形が、モデル形状5となる。
【0061】
具体的には、数値標高モデルMに「視点」情報と「視角」情報を与えて空間演算処理すると、投影地形すなわちモデル形状5が作成される。図7では、異なる3地点から投影して、3つの異なるモデル形状5を作成している。なおここでいう「視点」とは、投影する実空間上の3次元座標(X,Y,Z)であって、カメラ中心位置に該当する概念である。また、「視角」とは、投影方向及び視野角のことで、この投影方向はカメラ撮影する場合の撮影姿勢(X軸回りの傾きω(ピッチ)、Y軸回りの傾きφ(ロール)、Z軸回りの傾きκ(ヨー))に該当する概念であり、視野角は画面距離などで規定されるカメラ撮影範囲に該当するものである。
【0062】
視角(投影方向と視野角)及び視点を決め、数値標高モデルMを基に空間演算すれば、投影される地表モデルS上の範囲が特定されるとともに、その特定された範囲内の地形を同一平面(以下この平面を、「モデル画像面G」という。)上で、2次元の形状として表現することができる。ここで表現される2次元の形状が「モデル形状5」であり、この形状を構成する幾何学的要素(点、線分、面など)は、モデル画像面G内における任意の座標系(xb,yb)の座標で表すことができる。以下、このモデル画像面G内における任意座標系をモデル座標系という。なお、このような技術は、前記した特許文献1や特許文献2でも紹介されているとおり従来から用いられているものであり、これを実行するアプリケーションプログラムも市販されている。
【0063】
(基準形状とモデル形状との対応)
図6(a)に示す基準形状4を作成し、図6(b)に示すモデル形状5を作成すると、次に図6(c)に示すように基準形状4とモデル形状5を照らし合わせてそれぞれの構成要素同士の対応を図る。
【0064】
モデル形状5を作成する際に入力する視点及び視角(投影方向と視野角)を、基準形状4作成のために撮影したときの実際の撮影条件値(カメラ中心位置の座標、撮影姿勢、撮影範囲)とすれば、理論的には基準形状4とモデル形状5は完全に一致する。つまり、カメラ中心位置の座標(X,Y,Z)を「視点」とし、撮影姿勢(ω,φ,κ)を「視角」のうちの投影方向とし、撮影した撮影範囲を「視角」のうちの視野角として作成されたモデル形状5は、基準形状4と完全に一致する。なお、カメラ中心位置の座標やカメラ撮影姿勢を計測するには、トータルステーションや方位計(磁石、電子コンパス等)を利用することができるし、とくに飛行中に撮影する場合はGPSとIMUを利用することができる。また、撮影した撮影範囲を得るためには、カメラ1の諸元(画角、画面距離など)から求めることができる。
【0065】
基準形状4とモデル形状5が完全に一致すれば、これらを照らし合わせてそれぞれの構成要素同士の対応を図ることは容易である。しかしながら、実際には撮影条件値の計測精度や数値標高モデルMの位置精度の影響により、基準形状4とモデル形状5が完全に一致しないこともある(図6(c))。このような場合、基準形状4とモデル形状5をできる限り重なり合うように配置(以下、この状態を「最接近配置」という。)し、双方の近接している構成要素同士を対応させる。
【0066】
例えば、基準形状4とモデル形状5を同一の座標系(写真座標系もしくはモデル座標系)に配置し、さらに最小二乗法などによって基準形状4の構成点とモデル形状5の構成点との誤差(絶対値)が最小となるように両形状を最接近配置することができる。あるいは、基準形状4に反映させた特徴部(図6(a)の尾根部F1、谷部F2、尾根部F3)に着目し、この特徴部に相当するモデル形状5の特徴的な形状を抽出して、これと基準形状4の特徴部が合致するように最接近配置することもできる。
【0067】
最接近配置の状態で基準形状4とモデル形状5それぞれの構成要素を対応させる方法としては、次のような手法が例示できる。すなわち、最接近配置とした状態で、基準形状4の構成点とモデル形状5の構成点で最も接近している構成点同士を対応させる方法、所定ピッチのX座標で基準形状4とモデル形状5それぞれの構成点を算出して同じX座標の構成点同士を対応させる方法(図8)、あるいは、基準形状4をモデル形状5の形状(構成要素)に置き換える方法などが挙げられる。
【0068】
基準形状4とモデル形状5の構成要素の対応させる概念は、例えば、図8のように示すことができる。この図では、モデル形状5の構成点5_01、構成点5_02、構成点5_03、・・・構成点5_nを、それぞれ基準形状4の構成点4_01、構成点4_02、構成点4_03、・・・構成点4_nに対応させ、関連付けている。このように、基準形状4の構成点とモデル形状5の構成点との対応付けができれば、基準形状4の構成点4_01、構成点4_02、構成点4_03、・・・構成点4_nに、空間情報を与えることができる。すなわち、モデル形状5の構成点5_01、構成点5_02、構成点5_03、・・・構成点5_nは、本来、数値標高モデルMに基づいて作成されたものであるから、それぞれモデル形状5の構成点は実空間における3次元座標を含む空間情報(属性情報を含む場合もある)に紐づいており(つまり有しており)、このモデル形状5の構成点が有する空間情報を、それぞれ対応する基準形状4の構成点に付与すれば、基準形状4の構成点は空間情報を得ることができるわけである。なお、ここでは構成要素として構成点を対応させているが、これに限らず線分や線分の組み合わせ、あるいは面を用いて対応させてもよく、要は基準形状4とモデル形状5を構成する要素同士を対応させればよい。上記のように、基準形状4とモデル形状5の双方の構成要素同士を関連付けて、モデル形状5の構成要素の空間情報を、関連付けられた基準形状4の構成要素に与えてもよいし、これに代えて、基準形状4をモデル形状5に置き換えて基準形状4に空間情報を付与(モデル形状5の空間情報をそのまま利用)してもよい。
【0069】
基準形状4の構成点が空間情報を得たことによって、被写地物3のうち基準形状4の対象とならなかった被写地物3に対しても空間情報を付与することができる。つまり、本実施形態でいえば、被写地物3のうち「被写スカイライン3a」を基準形状4の対象としており、被写崩壊部3bは基準形状4の対象としていないが、この被写崩壊部3bに対しても空間情報を付与することができる。
【0070】
空間情報を付与したい被写地物(ここでは、被写崩壊部3bとする)について、基準形状4を作成したのと同様に、2次元の形状(以下、「出力形状6」という。)を作成する。出力形状6は、写真座標系(xa,ya)に配置することができるので、写真座標系の座標で表すことができる。また、基準形状4とモデル形状5を最接近配置とした状態は、両者が同一平面上に配置されているので、写真座標系のxa軸とモデル座標系のxb軸との較差(ずれ)、写真座標系のya軸とモデル座標系のyb軸との較差(ずれ)が分かる。従って、写真座標系(xa,ya)に配置された任意の点は、モデル座標系(xb,yb)へ変換することが可能で、出力形状6もモデル座標系の座標で表すことができて、その結果、実空間の3次元座標を付与することができる。つまり、現実に存在する崩壊部Bの位置や形状、大きさを特定することができる。
【0071】
(地図の作成)
崩壊部Bの位置や形状を特定することができると、既存の地図に記載して表示することが可能となり、崩壊部Bの情報を記した新たな地図を作成することができる。もちろん既存の地図に表示する場合に限らず、他の空間情報も加えて、崩壊部Bの位置や形状を記した新たな地図を作成することもできる。このように、崩壊部Bから十分離れて撮影するだけで地図上にプロットすることができるので、容易かつ安全に崩壊部Bを表示した地図を得ることができる。
【0072】
(実施フロー)
本実施形態を実施する手順の例を、図9に示す実施フローについて説明する。
【0073】
その位置や形状を特定したい被写地物(ここでは被写崩壊部3bとする)を含む画像(写真2)を、デジタルカメラなどのカメラ1によって取得する(901)。このとき、写真撮影したときの撮影条件値(カメラ中心位置の座標、撮影姿勢、撮影範囲)を、GPSやIMUなどの計測器を用いて計測しておく。
【0074】
写真2の中に収められた被写地物3の中から、モデル形状5と対応させやすい被写地物3(ここでは被写スカイライン3aとする)を抽出する(902)。写真2の画像データ内における山と空の輝度の違いから被写スカイライン3aの境界(エッジ)をコンピュータで自動生成させ、このエッジを構成する構成点に写真座標系の座標を付与し、これを基準形状4とする(903)。このとき、尾根部F1、谷部F2、尾根部F3を特徴部として基準形状4に反映させる(904)こともできる。
【0075】
既存の数値標高モデルMのうち、被写地物3を含む地域を選定する(905)。数値標高モデルMが広範にわたる場合は、ある程度その範囲を限定することで演算処理にかかる負荷を軽減させることができるからであり、数値標高モデルMの範囲が比較的限定的であれば必ずしも地域を選定する必要はない。
【0076】
撮影条件値(カメラ中心位置の座標、撮影姿勢、撮影範囲)を、モデル形状5を作成するための視点及び視角(投影方向と視野角)として入力する(906)。このうち、カメラ中心位置の座標と撮影姿勢については撮影時に計測した値を、撮影範囲についてはカメラ1の諸元(焦点距離や画面距離など)から求めた値を用いる。ここで入力された視点及び視角と、地域選定された数値標高モデルMと、に基づいて空間演算処理が行われ、2次元の形状であるモデル形状5が作成される(907)。
【0077】
基準形状4とモデル形状5を同一の座標系(2次元)に配置し、さらに基準形状4とモデル形状5とができるだけ一致するように両形状を最接近配置の状態に置く。このとき、基準形状4に反映させた特徴部に着目しながら、基準形状4とモデル形状5とを照らし合わせるとよい。また、最小二乗法などによって基準形状4の構成点とモデル形状5の構成点との誤差(絶対値)が最小となるような最接近配置としてもよい。この最接近配置の状態で、基準形状4の構成点とモデル形状5の構成点で最も接近している構成点同士(あるいは同一のX座標を持つもの同士(図8)など)、両構成点の関連付けを行う。又は、基準形状4をモデル形状5の形状とする(908)。
【0078】
基準形状4の構成点とモデル形状5の構成点との関連付け(若しくはモデル形状5の形状への置き換え)ができると、モデル形状5の構成点が有する3次元座標を、これに関連する基準形状4の構成点に付与する(909)。被写崩壊部3bについて、CADなどの作図アプリケーションを利用して出力形状6を作成する。この出力形状6を写真座標系の座標で表し、写真座標系とモデル座標系との空間的な関連からモデル座標系における出力形状6の座標を求める。さらに、数値標高モデルMを基に、出力形状6に空間情報を付与し、被写崩壊部3bの位置や形状を特定する(910)。必要に応じて、既存の地図に崩壊部Bの位置や形状を記載して表示し、崩壊部Bの情報を記した地図を作成する。
【0079】
(システムの機器構成)
図10は、「被写地物の位置特定システム」を構成する機器の配置を示す説明図であり、この図に基づいて、本実施形態における「被写地物の位置特定システム」の機器構成の一例を説明する。
【0080】
図10に示すように、ホストコンピュータ7と、端末コンピュータ8と、数値標高モデルデータベース9が、有線又は無線のネットワークで接続されている。端末コンピュータ8は、カメラ1(デジタルカメラ)から写真2の画像データを読取り、実際に撮影したときの撮影条件値を記憶する。さらに、画像データ内における輝度の違いから被写地物3の境界(エッジ)を自動生成させ、このエッジの構成点に対して同一平面上で2次元座標を付与することで基準形状4を作成する。また、特徴部を入力し、これを基準形状4に反映させることもできる。
【0081】
ホストコンピュータ7は、通信によって端末コンピュータ8から基準形状4や撮影条件値を受け取るとともに、数値標高モデルデータベース9から数値標高モデルMを受け取る。このとき、必要な地域を指定して、当該範囲に限定した数値標高モデルMを数値標高モデルデータベース9から受け取ることもできる。さらにホストコンピュータ7は、図9の実施フローに示す907〜910のステップ(又は、実施形態3で説明する図11の実施フローの1107〜1113ステップ)を実行する。
【0082】
なお図10では、ホストコンピュータ7、端末コンピュータ8、数値標高モデルデータベース9がネットワークで接続されているが、これに限らずホストコンピュータ7と端末コンピュータ8を一体のものとしたり、ホストコンピュータ7と数値標高モデルデータベース9を一体のものとしたり、ホストコンピュータ7と端末コンピュータ8と数値標高モデルデータベース9すべてを一体のものとすることもできる。
【0083】
(実施形態3)
ここでは、「被写地物の位置特定方法とそのプログラム、及び被写地物の表示地図」の第3の実施形態について説明する。本実施形態は、実施形態2においてモデル形状5を作成するための視点及び視角のうちいずれかあるいは全てが未知である場合について説明するものであり、実施形態1や実施形態2と共通する技術内容に関する説明は省略する。
【0084】
被写地物3を撮影した際、カメラ中心位置の座標のみを計測し、撮影姿勢については計測しないこともある。あるいは、撮影姿勢についてのみ計測する場合や、カメラ中心位置の座標と撮影姿勢の両方を計測しない場合も考えられる。このような場合、次のような手順に沿って照合判断を行ってモデル形状5を作成するとよい。すなわち、未知である視点や視角(投影方向と視野角)の値を変数として取り扱い、これらの値を初期値(任意値)から徐々に変化させ、それぞれの視点や視角で計算される形状を「モデル形状候補5’」として作成する。例えば、カメラ中心位置の座標が既知で撮影姿勢が未知の場合には、視点(座標値)を固定して視角を変数として初期値から変化させてそれぞれモデル形状候補5’を作成する。また、カメラ中心位置の座標も撮影姿勢も未知の場合には、視点(座標値)、視角をともに変数として初期値から変化させてそれぞれモデル形状候補5’を作成する。作成されたモデル形状候補5’を基準形状4に照らし合わせ、所定の近似条件に基づいて照合判断を行う。このモデル形状候補5’の算出及び基準形状4との照合判断は、照合したと判断されるまで繰り返し行われ、照合したと判断されたモデル形状候補5’がモデル形状5として抽出される。
【0085】
モデル形状候補5’と基準形状4との照合判断は、両者を重ね合わせる等によって両形状の一致性を判断するものであり、もちろん両形状が完全に一致(合同となる)する場合に限らず、一致と判断し得る程度に両形状が近似している場合も同様に一致した、つまり照合したと判断することができる。一致性の判断(照合判断)を行う場合、次のような手法を例示することができる。すなわち、モデル形状候補5’と基準形状4を最接近配置(実施形態2での説明と同様)において、所定の条件(近似条件)を満足した場合は照合したと、満足しない場合は照合しないと判断する。この近似条件としては、例えば、最接近配置における誤差(絶対値)の総計を閾値以下とする条件や、最接近配置において許容誤差(事前に設定)外にある構成点の点数を閾値以下とする条件、などが挙げられる。あるいは、特徴部(実施形態2の説明と同様で、例えば、図6(a)の尾根部F1、谷部F2、尾根部F3)のみに着目して、その特徴部が前記のような近似条件を満足する場合に照合したとすることもできるし、近似条件を設けずに(無条件として)、最接近配置とした時点で基準形状4とモデル形状候補5’が照合したものとすることもできる。
【0086】
モデル形状候補5’が基準形状4と照合したと判断され、そのモデル形状候補5’がモデル形状5として抽出されると、実施形態2と同様、基準形状4とモデル形状5の構成要素の対応付けが行われ、基準形状4の構成要素に対して数値標高モデルMによる実空間の空間情報が与えられる。さらに、基準形状4の構成点が空間情報を得たことによって、被写地物3のうち基準形状4の対象とならなかった被写地物3(例えば、被写崩壊部3b)に対しても空間情報を付与することができるので、その位置や形状を既存の地図に記載して表示することが可能となるのも実施形態2と同様である。
【0087】
(実施フロー)
本実施形態を実施する手順の例を、図11に示す実施フローについて説明する。
【0088】
その位置や形状を特定したい被写地物(ここでは被写崩壊部3bとする)を含む画像(写真2)を、デジタルカメラなどのカメラ1によって取得する(1101)。このとき、写真撮影したときの撮影条件値(カメラ中心位置の座標)を、トータルステーションなどの計測器を用いて計測しておく。
【0089】
写真2の中に収められた被写地物3の中から、モデル形状5と対応させやすい被写地物3(ここでは被写スカイライン3aとする)を抽出する(1102)。写真2の画像データ内における山と空の輝度の違いから被写スカイライン3aの境界(エッジ)をコンピュータで自動生成させ、このエッジを構成する構成点に対して同一平面上の2次元座標を付与して基準形状4を作成する(1103)。このとき、尾根部F1、谷部F2、尾根部F3、(図6(a))を特徴部として基準形状4に反映させる(1104)こともできる。
【0090】
既存の数値標高モデルMのうち、被写地物3を含む地域を選定する(1105)。数値標高モデルMが広範にわたる場合は、ある程度その範囲を限定することで演算処理にかかる負荷を軽減させることができるからであり、数値標高モデルMの範囲が比較的限定的であれば必ずしも地域を選定する必要はない。
【0091】
モデル形状5を作成するための視点及び視角(投影方向と視野角)を入力する(1106)。なおここでは、撮影条件値のうちカメラ中心位置の座標が既知であるとして、これを視点として入力し、視角については任意の初期値を入力する。
【0092】
地域選定された数値標高モデルMと、入力された視点及び視角と、に基づいて空間演算処理が行われ、2次元の形状であるモデル形状5の候補(つまりモデル形状候補5’)が作成される(1107)。基準形状4とモデル形状候補5’を同一の座標系(2次元)に配置し、さらに最小二乗法などによって基準形状4の構成点とモデル形状5の構成点との誤差(絶対値)が最小となるように両形状を最接近配置の状態とする(1108)。この状態で、近似条件に基づいて照合判断を行い(1109)、近似条件を満たす場合、つまり照合したと判断できる場合は次のステップ(1110)に進む。近似条件を満たさない場合、つまり照合しないと判断される場合は、再度、視点・視角の入力(1106)を行う。ただしこのときは、視点の値はそのままとし、前回の視角の入力値は変更して入力する。このように、基準形状4とモデル形状候補5’が照合するまで、視角の入力(1106)〜照合判断(1109)が繰り返し実施される。
【0093】
基準形状4とモデル形状候補5’が照合すると判断されると、当該モデル形状候補5’をモデル形状5として抽出し(1110)、基準形状4の構成点とモデル形状5の構成点との関連付け(若しくはモデル形状5の形状への置き換え)を行う(1111)。基準形状4の構成点とモデル形状5の構成点との関連付け(若しくはモデル形状5の形状への置き換え)ができると、モデル形状5の構成点が有する3次元座標を、これに関連する基準形状4の構成点に付与する(1112)。次に、被写崩壊部3bについて、CADなどの作図アプリケーションを利用して出力形状6を作成する。この出力形状6を写真座標系の座標で表し、写真座標系とモデル座標系との空間的な関連からモデル座標系における出力形状6の座標を求める。さらに、数値標高モデルMを基に、出力形状6に空間情報を付与し、被写崩壊部3bの位置や形状を特定する(1113)。必要に応じて、既存の地図に崩壊部Bの位置や形状を記載して表示し、崩壊部Bの情報を記した地図を作成する。
【0094】
(システムの機器構成)
本実施形態における「被写地物の位置特定システム」を構成する機器の配置も、実施形態1と同様に図10に示す機器構成とすることができる。
【0095】
(実施形態4)
ここでは、「被写地物の位置特定方法とそのプログラム、及び被写地物の表示地図」の第4の実施形態について説明する。本実施形態は、実施形態2〜3において画像に基づいて基準形状4とモデル形状5を作成する場合について説明するものであり、実施形態1〜3と共通する技術内容に関する説明は省略する。
【0096】
(基準形状)
被写地物3とモデル形状5を対応させるためには、被写地物3をコンピュータで処理できる基準形状4としたうえでモデル形状5と対応させることが望ましく、本実施形態では画像に基づいて基準形状4を作成する。実施形態1〜3と同様、基準形状4は写真2の中に収められた全ての被写地物3に基づいて作成してもよいが、モデル形状5と対応させやすい(つまり数値標高モデルMで表現可能な)地物を被写地物3の中から抽出して作成する方が好適である。本実施形態では、写真2に写された被写地物3の中から被写山部3c(写真2内に写る山の形状、図2)を抽出している。
【0097】
基準形状4は、写真2内のうち被写山部3cを構成する画像(画素の集合)を抽出し、この画像を基準形状4とする。この場合、写真2をモニタで表示して目視で確認しながら被写山部3cの画像を切り出して基準形状4を作成することができる。または、写真2の画像データ内の輝度(あるいは彩度や明度)の違いに基づいて、地物の境界(エッジ)をコンピュータで自動的に認識し、このエッジ内を構成する画素の集合を基準形状4として作成することもできる。
【0098】
(モデル形状)
モデル形状5は、数値標高モデルMとこれに付与されたテクスチャに基づいて作成される。2枚1組のステレオ航空写真や衛星写真を用いてステレオマッチングを行えば、数値標高モデルMに対してその地形に応じた画像(画素の集合)、すなわちテクスチャを与えることができる。あるいは、数値標高モデルMにおける各メッシュの地形量(標高値や傾斜角など)を計算し、その傾斜量に応じた色(色相、彩度、明度)を各メッシュに与えた地形量図を、テクスチャとして数値標高モデルMに付与することもできる。この地形量図としては、光源を与えて作成される陰影図(陰と影を付けた図)や水系図など、種々のものが挙げられる。このようにしてテクスチャ(航空写真や地形量図など)が付与された数値標高モデルMと、実施形態2、3で説明した視点及び視角(投影方向と視野角)に基づいて空間演算を行えば、視点と視角によって投影される地表モデルS上の範囲が特定され、その特定された範囲内の画像を表現することが可能であり、この画像をモデル形状5とする。
【0099】
(基準形状とモデル形状との対応)
画像による基準形状4と、画像によるモデル形状5を作成したら、これらを照らし合わせてそれぞれの画素同士の対応を図る。具体的には、基準形状4とモデル形状5のそれぞれの画素配列に基づいて、基準形状4の画素とモデル形状5の画素を対応させる。このとき、実施形態2、3で説明した手法(被写地物3の外形や特徴部を用いる手法)を組み合わせて行うこともできる。対応する画素同士を照らし合わせて、一致性の判断(照合判断)を行ったうえで、基準形状4の画素に空間情報を付与することもできるが、視点と視角に実際の撮影条件値(カメラ中心位置の座標、撮影姿勢、撮影範囲)を採用した場合など、ある程度基準形状4に近似した状態でモデル形状5を作成することができる場合は、照合判断を省略してそのまま基準形状4の画素に空間情報を付与することもできる。
【0100】
本実施形態における照合判断は、対応する画素同士の属性に基づいて行う。この場合の属性とは色属性のことであるが、本来、色は人の視覚で認識するものであり、個人差が伴うものである。しかしながら、近年この色をコンピュータで扱うべく色属性を数値化させる技術が定着してきた。色属性を数値化する手法にも種々あり、赤(Red)・緑(Green)・青(Blue)の3色を基本色とするRGB、シアン(Cyan)・マゼンタ(Magenta)・イエロー(Yellow)・ブラック(Keycolor)の4色を基本色とするCMYK、黄・赤・青・緑・黒・白の6色を基本色とするNCSやオストワルト表色系などが知られている。本実施形態では、以下、RGBで色属性を数値化した場合について説明するが、本願発明を実施するには他の手法を採用してもよい。
【0101】
ここで、RGBについて簡単に説明する。色は、色相、彩度、明度からなる3つの属性を備えており、RGBは赤・緑・青を基本色としてこの3原色を混ぜ合わせる加法混色により、様々な色の3属性を表現するものである。具体的には、RGBは赤・緑・青をそれぞれの明度で表現するものであって、赤の明度をr、緑の明度をg、青の明度をbとすると、RGBは(r、g、b)で表され、rとgとbの値の組み合わせによって色の3属性を表現することができる。
【0102】
本実施形態における照合判断を具体的に説明すると、以下のとおりである。すなわち、基準形状4とモデル形状5に関して、それぞれ対応する画素ごとにRGBを比較し、事前に設定した近似条件に従って照合の有無を判断する。この近似条件としては、例えば、双方のRGBの較差が許容値内である画素数の比率(前画素数に対する比率)を閾値以上とする条件や、RGBの較差の最大値を閾値以下とする条件、などが挙げられる。このような近似条件の下、基準形状4とモデル形状5を照らし合わせて、この条件を満足した場合は照合したと、満足しない場合は照合しないと判断する。
【0103】
基準形状4とモデル形状5の照合判断を行う場合、視点及び視角の値を初期値(例えば、撮影条件値)から徐々に変化させて繰り返し計算を行う。つまり、それぞれの視点及び視角で計算される形状を「モデル形状候補5’」とし、これを基準形状4と照らし合わせて所定の近似条件に基づき照合判断を行う。この照合判断は、基準形状4とモデル形状候補5’が照合したと判断されるまで繰り返し行われ、照合したと判断されたモデル形状候補5’をモデル形状5として抽出する。
【0104】
このようにして抽出されたモデル形状5(照合判断しない場合も含む)の画素を用いて、これに対応する基準形状4の画素に対して空間情報を付与する。あるいは、実施形態2、3で説明したように、基準形状4の画像(画素の集合)をモデル形状5の画像(画素の集合)に置き換える。モデル形状5を構成する画素は、数値標高モデルMに関連づいたものであるから、それぞれの画素は3次元の座標を含む空間情報(属性情報を含む場合もある)を有しており、このモデル形状5の画素が有する空間情報を、それぞれ対応する基準形状4の画素に付与すれば、基準形状4の画素は空間情報を得ることができる。
【0105】
さらに、基準形状4の画素が空間情報を得たことによって、被写地物3のうち基準形状4の対象とならなかった被写地物3に対しても空間情報を付与することができる。本実施形態でいえば、被写地物3のうち「被写山部3c」を基準形状4の対象としており、被写崩壊部3bは基準形状4の対象としていないが、この被写崩壊部3bに対しても空間情報を付与することができる。
【0106】
空間情報を付与したい被写崩壊部3bについて、基準形状4を作成したのと同様に、画像に基づいて2次元の形状(以下、「出力形状6」という。)を作成する。実施形態2、3と同様に、被写崩壊部3bと被写山部3cの配置関係、さらには被写山部3cとモデル形状5の配置関係から、被写崩壊部3bとモデル形状5の関連付けが行われ、この結果、被写崩壊部3bに対して数値標高モデルMによる実空間の空間情報を付与することができる。つまり、被写崩壊部3bに空間情報が付与され、崩壊部Bの位置や形状を特定することができる。
【0107】
(実施フロー)
本実施形態を実施する手順は、基準形状4とモデル形状5を作成する手法を除けば実施形態2、3と同様である。ここでは、図12に基づいて、照合判断する場合の実施フローについて説明する。なお、照合判断しない場合の実施フローは図9と同様であるので省略する。
【0108】
その位置や形状を特定したい被写崩壊部3bを含む画像(写真2)を、デジタルカメラなどのカメラ1によって取得する(1201)。このとき、写真撮影したときの撮影条件値(カメラ中心位置の座標、撮影姿勢、撮影範囲)を、GPSやIMUなどの計測器を用いて計測しておく。
【0109】
写真2の中に収められた被写地物3の中から、モデル形状5と対応させやすい被写山部3cを抽出する(1202)。写真2の画像データ内における山と空の輝度の違いから被写スカイライン3aの境界(エッジ)をコンピュータで自動的に認識し、このエッジ内を構成する画素の集合を基準形状4として作成する。(1203)。このとき、尾根部F1、谷部F2、尾根部F3、(図6(a))を特徴部として基準形状4に反映させる(1204)こともできる。
【0110】
既存の数値標高モデルMのうち、被写地物3を含む地域を選定する(1205)。数値標高モデルMが広範にわたる場合は、ある程度その範囲を限定することで演算処理にかかる負荷を軽減させることができるからであり、数値標高モデルMの範囲が比較的限定的であれば必ずしも地域を選定する必要はない。
【0111】
モデル形状5を作成するための視点及び視角(投影方向と視野角)を、撮影条件値(カメラ中心位置の座標、撮影姿勢、撮影範囲)として入力する(1206)。このうち、カメラ中心位置の座標と撮影姿勢については撮影時に計測した値を、撮影範囲についてはカメラ1の諸元(焦点距離や画面距離など)から求めた値を用いる。ここで入力された視点及び視角と、テクスチャが付与された数値標高モデルMと、に基づいて空間演算処理が行われ、視点と視角によって投影される地表モデルS上の範囲が特定され、その特定された範囲内の画像によりモデル形状5の候補(つまりモデル形状候補5’)が作成される(1207)。
【0112】
基準形状4とモデル形状候補5’のそれぞれの画素配列に基づいて、基準形状4の画素とモデル形状候補5’の画素を対応させ(1208)、所定の近似条件に基づいて照合判断を行い(1209)、近似条件を満たす場合、つまり照合したと判断できる場合は次のステップ(1210)に進む。近似条件を満たさない場合、つまり照合しないと判断される場合は、再度、視点・視角の入力(1206)を行う。ただしこのときは、前回値とは変えて視点・視角を入力する。このように、基準形状4とモデル形状候補5’が照合するまで、視点・視角の入力(1206)〜照合判断(1209)が繰り返し実施される。
【0113】
モデル形状5の画素を用いて、これに対応する基準形状4の画素に対して空間情報を付与する(1210)。被写崩壊部3bについても、基準形状の作成(1206)と同様に、出力形状6を作成する。被写崩壊部3bと被写山部3cの配置関係、さらには被写山部3cとモデル形状5の配置関係から、被写崩壊部3bとモデル形状5の関連付けが行われ、この結果、被写崩壊部3bに対して数値標高モデルMによる実空間の空間情報を付与することができる。つまり、被写崩壊部3bに空間情報が付与され、崩壊部Bの位置や形状を特定することができる(1211)。必要に応じて、既存の地図に崩壊部Bの位置や形状を記載して表示し、崩壊部Bの情報を記した地図を作成する。
【0114】
[撮影位置取得方法とそのプログラム、及び撮影位置取得装置の実施形態]
本実施形態は、本願発明の「撮影位置取得方法とそのプログラム、及び撮影位置取得装置」について説明するものである。なお本実施形態は、[被写地物の位置特定方法とそのプログラム、及び被写地物の表示地図の実施形態](実施形態1〜4)において実施する被写地物3への空間情報付与(位置と形状の特定)に代えて、モデル形状5を作成する際の視点及び視角を求める場合について説明するものである。従って、被写地物3への空間情報付与に関すること以外、すなわち[被写地物の位置特定方法とそのプログラム、及び被写地物の表示地図の実施形態]の実施形態1〜4で説明した、単写真2の撮影、被写地物3の抽出、基準形状4の作成、モデル形状5の作成、基準形状4とモデル形状5の照合(照合判断含む)などに関することは、本実施形態でも同様であり、ここでの説明は省略する。なお、本実施形態における基準形状4の作成とモデル形状5の作成は、[被写地物の位置特定方法とそのプログラム、及び被写地物の表示地図の実施形態]の実施形態1〜3で説明した手法(外形に基づく手法)でも、実施形態4で説明した手法(画像に基づく手法)でも構わない。
【0115】
図13は、本願発明の撮影位置取得装置10を用いて、現在撮影している位置を取得している状況を示す説明図である。撮影位置取得装置10はデジタルカメラのような画像取得手段を備えており、図に示す撮影者は市街地の風景を撮影している。ここで撮影した写真2にはホテルDとマンションEが収められており、それぞれ被写ホテル3dと被写マンション3eとして被写地物3を取得している。
【0116】
図13に示す写真2の被写地物3のうち被写ホテル3dと被写マンション3eを抽出し、被写ホテル3dと被写マンション3eについて基準形状4を作成する。この場合における基準形状4の作成は、前記したとおり、[被写地物の位置特定方法とそのプログラム、及び被写地物の表示地図の実施形態]の実施形態1〜3で説明した手法でも、実施形態4で説明した手法でも構わない。
【0117】
ホテルDとマンションEを含む当該市街地は、既に数値標高モデルM(あるいはテクスチャが付与された数値標高モデルM)が作成されており、この数値標高モデルM(あるいはテクスチャが付与された数値標高モデルM)に基づいてモデル形状5を作成する。このときの視点及び視角は不明であるので、所定の初期値(デフォルト値)を採用する。視点及び視角を初期値から徐々に変えながらモデル形状候補5’を計算し、それぞれ基準形状4と照合する。モデル形状候補5’の計算と基準形状4との照合を、近似条件が満足されるまで繰り返し行い、照合判断されたモデル形状候補5’をモデル形状5として抽出する。なおこの場合もモデル形状5の作成は、[被写地物の位置特定方法とそのプログラム、及び被写地物の表示地図の実施形態]の実施形態2、3で説明した手法でも、実施形態4で説明した手法でも構わない。
【0118】
このようにして抽出されたモデル形状5を計算したときに採用された視点及び視角が、写真2を撮影したときの撮影条件値、つまり(カメラ中心位置の座標、撮影姿勢、撮影範囲)と判断することができる。
【0119】
撮影したときに(つまりリアルタイムで)撮影した座標が分かれば、観光旅行者などその土地に不案内な者にとっては極めて便利であり、道に迷うことなく目的地にたどり着くことができる。あるいは、撮影位置取得装置10によって取得した撮影位置情報と連動して、観光案内(例えば、撮影したホテルDの解説)の音声を発生させることもできる。
【0120】
また本実施形態は、撮影したときにリアルタイムで撮影位置情報を取得する場合に限らず、過去に撮影した写真2の撮影位置情報を取得するためにも利用することができる。図14は、写真2の撮影位置情報を取得する場合の実施フローである。
【0121】
過去に撮影された写真2(1401)があり、この写真2にはホテルDとマンションEが収められているものの、どこで撮影されたものかは現在では不明である。写真2の中に収められた被写地物3の中から、被写ホテル3dと被写マンション3eを抽出する(1402)。写真2の画像データ内における建物(ホテルD、マンションE)と空の輝度の違いから被写ホテル3dと被写マンション3eの境界(エッジ)をコンピュータで自動生成させ、このエッジの構成点に対して同一平面上の2次元座標を付与して基準形状4を作成する(1403)。このとき、ホテルDやマンションEの特徴部を基準形状4に反映させる(1404)こともできる。
【0122】
写真2を撮影した概ねの地域が分かる場合は、既存の数値標高モデルMのうち、被写地物3を含む地域を選定する(1405)。数値標高モデルMが広範にわたる場合は、ある程度その範囲を限定することで演算処理にかかる負荷を軽減させることができるからであり、数値標高モデルMの範囲が比較的限定的であれば必ずしも地域を選定する必要はない。
【0123】
モデル形状5を作成するための視点及び視角は不明なので、所定の初期値(デフォルト値)を入力する(1406)。地域選定された数値標高モデルMと、初期値が入力された視点及び視角と、に基づいて空間演算処理が行われ、2次元の形状であるモデル形状5の候補(つまりモデル形状候補5’)が作成される(1407)。基準形状4とモデル形状候補5’を同一の座標系(2次元)に配置し、さらに最小二乗法などによって基準形状4の構成点とモデル形状5の構成点との誤差(絶対値)が最小となるように両形状を最接近配置の状態とする(1408)。この状態で、近似条件に基づいて照合判断を行い(1409)、近似条件を満たす場合、つまり照合したと判断できる場合は次のステップ(1410)に進む。近似条件を満たさない場合、つまり照合しないと判断される場合は、再度、視点・視角の入力(1406)を行う。ただしこのときは、前回値とは変えて視点・視角を入力する。このように、基準形状4とモデル形状候補5’が照合するまで、視点・視角の入力(1406)〜照合判断(1409)が繰り返し実施される。
【0124】
基準形状4とモデル形状候補5’が照合すると判断されると、当該モデル形状候補5’をモデル形状5として抽出する(1410)。ここで抽出されたモデル形状5に対応する視点及び視角、すなわちモデル形状5を計算したときに採用した視点及び視角が、写真2を撮影したときの撮影条件値(カメラ中心位置の座標、撮影姿勢、撮影範囲)であり、これから撮影した位置を特定することができる(1411)。
【0125】
(システムの機器構成)
図15は、「撮影位置取得装置」を構成する機能を示す説明図であり、(a)は全ての機能を一体型とした場合の撮影位置取得装置の説明図であり、(b)は機能を分散型とした場合の撮影位置取得装置の説明図である。
【0126】
図15(a)に示すように、撮影位置取得装置10には、主演算機能11と、基準形状演算機能12と、数値標高モデルデータベース13が、格納されており、さらに写真2を取得し記憶するカメラ機能も備えている。基準形状演算機能12は、カメラ機能で取得した写真2の画像データを読取り、画像データ内における輝度の違いから被写地物3の境界(エッジ)を自動生成させ、このエッジの構成点に対して同一平面上の2次元座標を付与することで基準形状4を作成する。また、特徴部を入力し、これを基準形状4に反映させることもできる。
【0127】
主演算機能11は、基準形状演算機能12で計算した基準形状4を受け取るとともに、数値標高モデルデータベース13から数値標高モデルMを受け取る。このとき、必要な地域を指定して、当該範囲に限定した数値標高モデルMを数値標高モデルデータベース13から受け取ることもできる。さらに主演算機能11は、図14の実施フローに示す1406〜1411のステップを実行する機能を有し、これらを実行することにより写真2の撮影地点を特定する。
【0128】
撮影位置取得装置10は、図15(b)に示すように、カメラ機能と通信機能を有するものとし、無線(あるいは有線)による通信手段によって、ホストコンピュータ7、端末コンピュータ8、数値標高モデルデータベース9と接続する構成とすることもできる。ホストコンピュータ7と、端末コンピュータ8と、数値標高モデルデータベース9もまた、有線又は無線のネットワークで接続されており、これらは撮影現場から離れた場所に設置することもできる。
【0129】
端末コンピュータ8は、通信手段を介して撮影位置取得装置10から写真2の画像データを受け取り、基準形状演算機能12を実行して基準形状4を作成する。ホストコンピュータ7は、ネットワークを介して端末コンピュータ8から基準形状4を受け取り、さらに数値標高モデルデータベース9から数値標高モデルMを受け取る。このとき、必要な地域を指定して、当該範囲に限定した数値標高モデルMを数値標高モデルデータベース9から受け取ることもできる。さらにホストコンピュータ7は、主演算機能11、すなわち図14の実施フローに示す1406〜1411のステップを実行する機能を有し、これらを実行することにより写真2の撮影地点を特定する。
【産業上の利用可能性】
【0130】
被写地物の位置特定方法、撮影位置取得方法、撮影位置取得装置、被写地物の位置特定プログラム、及び被写地物の撮影位置取得プログラムは、人が直接その場所に立ち入ることなく被写地物の位置や形状を把握できるので、特に、被災地のなど人が立ち入ることのできない地物に対して利用するとより効果的である。また、災害に対して迅速に対策を講じることができるので、集落や道路などの機能が速やかに回復させ、産業上利用できるばかりでなく社会的にも大きな貢献を期待し得る発明である。
【符号の説明】
【0131】
1 カメラ
2 写真
3 被写地物
3a 被写スカイライン
3b 被写崩壊部
3c 被写山部
3d 被写ホテル
3e 被写マンション3e
4 基準形状
4_n基準形状の構成点
5 モデル形状
5’ モデル形状候補
5_nモデル形状の構成点
6 出力形状
7 ホストコンピュータ
8 端末コンピュータ
9 数値標高モデルデータベース
10 撮影位置取得装置
11 主演算機能
12 基準形状演算機能
13 数値標高モデルデータベース
A 山の稜線(スカイライン)
B 崩壊部
D ホテル
E マンション
F1 特徴部(尾根部)
F2 特徴部(谷部)
F3 特徴部(尾根部)
G モデル画像面
Gr 地形
L レーザー
M 数値標高モデル
P 航空機
Ph カメラ画像面
S 地表モデル
X 実空間におけるx軸
Y 実空間におけるy軸
Z 実空間におけるz軸
xa 写真座標系におけるx軸
ya 写真座標系におけるy軸
xa モデル座標系におけるx軸
ya モデル座標系におけるy軸
【特許請求の範囲】
【請求項1】
数値標高モデルに基づいて、写真に写された被写地物の位置又は/及び形状を特定する方法であって、
前記被写地物の形状から4点以上の特徴点を選出するとともに、これら特徴点に対して、写真平面内の任意座標系による座標を付与し、
前記数値標高モデルに基づく地表モデルを投影したモデル形状から前記特徴点に相当する点を4点以上選出するとともに、これら特徴点に相当する点に対して、モデル形状を表す平面内の任意座標系の座標を付与し、
前記被写地物の特徴点と、前記モデル形状の特徴点に相当する点とを対応させることで、写真平面内の任意座標系と、モデル形状を表す平面内の任意座標系とを関連づけ、
前記数値標高モデルに基づいて、前記被写地物に空間情報を付与し、当該被写地物の位置又は/及び形状を特定することを特徴とする被写地物の位置特定方法。
【請求項2】
数値標高モデルに基づいて、写真に写された被写地物の位置又は/及び形状を特定する方法であって、
前記被写地物の一部又は全部の形状に基づいて2次元の基準形状を作成するとともに、写真平面内の任意座標系により基準形状に座標を付与し、
前記数値標高モデルに基づく地表モデルを投影した2次元のモデル形状を作成するとともに、このモデル形状を表す平面内の任意座標系によりモデル形状に座標を付与し、
前記基準形状の構成要素と、前記モデル形状の構成要素とを対応させることで、写真平面内の任意座標系と、モデル形状を表す平面内の任意座標系とを関連づけ、
前記数値標高モデルに基づいて、前記被写地物に空間情報を付与し、当該被写地物の位置又は/及び形状を特定することを特徴とする被写地物の位置特定方法。
【請求項3】
数値標高モデルに基づいて、写真に写された被写地物の位置又は/及び形状を特定する方法であって、
前記被写地物の一部又は全部の画像に基づいて2次元の基準形状を作成するとともに、写真平面内の任意座標系により基準形状を構成する画素に座標を付与し、
画像が付与された数値標高モデルに基づく地表モデルを投影した投影画像から、2次元のモデル形状を作成するとともに、このモデル形状を表す平面内の任意座標系によりモデル形状を構成する画素に座標を付与し、
前記基準形状の画素と、前記モデル形状の画素とを対応させることで、写真平面内の任意座標系と、モデル形状を表す平面内の任意座標系とを関連づけ、
前記数値標高モデルに基づいて、前記被写地物に空間情報を付与し、当該被写地物の位置又は/及び形状を特定することを特徴とする被写地物の位置特定方法。
【請求項4】
請求項2又は請求項3記載の被写地物の位置特定方法において、
地表モデルを投影するための視点及び視角を変えることによって、複数の地表モデルを投影した形状をモデル形状候補として作成し、
前記モデル形状候補と基準形状を照合することによって、複数のモデル形状候補の中から基準形状に相当するものをモデル形状とすることを特徴とする被写地物の位置特定方法。
【請求項5】
数値標高モデルに基づいて、写真に写された被写地物の位置又は/及び形状が表示された地図であって、
請求項1乃至請求項4記載の被写地物の位置特定方法によって、位置又は/及び形状が特定された被写地物が、表示されたことを特徴とする被写地物の表示地図。
【請求項6】
写真に写された被写地物の位置又は/及び形状を、数値標高モデルに基づいて特定するプログラムであって、
請求項1乃至請求項4記載の被写地物の位置特定方法を、コンピュータに実行させることを特徴とする被写地物の位置特定プログラム。
【請求項7】
写真に写された被写地物、及び数値標高モデルに基づいて、被写地物を撮影した地点を取得する方法であって、
前記被写地物の一部又は全部の形状に基づいて2次元の基準形状を作成するとともに、写真平面内の任意座標系により基準形状に座標を付与し、
前記数値標高モデルに基づく地表モデルを投影するための視点及び視角を変えることによって、複数の地表モデルを投影した2次元の形状をモデル形状候補として作成するとともに、これらモデル形状候補を表す平面内の任意座標系によりモデル形状候補に座標を付与し、
前記モデル形状候補と基準形状を照合することによって、複数のモデル形状候補の中から基準形状に相当するものをモデル形状として抽出し、
前記抽出されたモデル形状に対応する視点を被写地物の撮影地点とすることを特徴とする撮影位置取得方法。
【請求項8】
写真に写された被写地物、及び数値標高モデルに基づいて、被写地物を撮影した地点を取得する方法であって、
前記被写地物の一部又は全部の画像に基づいて2次元の基準形状を作成するとともに、写真平面内の任意座標系により基準形状を構成する画素に座標を付与し、
前記数値標高モデルに基づく地表モデルを投影するための視点及び視角を変えることによって、複数の地表モデルを投影した投影画像から、複数の2次元の形状をモデル形状候補として作成するとともに、これらモデル形状候補を表す平面内の任意座標系によりモデル形状を構成する画素に座標を付与し、
前記モデル形状候補と基準形状を照合することによって、複数のモデル形状候補の中から基準形状に相当するものをモデル形状として抽出し、
前記抽出されたモデル形状に対応する視点を被写地物の撮影地点とすることを特徴とする撮影位置取得方法。
【請求項9】
写真に写された被写地物、及び数値標高モデルに基づいて、被写地物を撮影した地点の位置情報を取得するプログラムであって、
請求項7又は請求項8記載の撮影位置取得方法を、コンピュータに実行させることを特徴とする撮影位置取得プログラム。
【請求項10】
写真に写された被写地物、及び数値標高モデルに基づいて、被写地物を撮影した地点の位置情報を取得する装置であって、
被写地物を撮影し、この画像データを取得する手段と、
前記画像データから、請求項7又は請求項8記載の基準形状を作成する手段と、
請求項7又は請求項8記載の複数のモデル形状候補を作成する手段と、
前記モデル形状と基準形状を照合することによって、複数のモデル形状の中から基準形状に相当するものをモデル形状として抽出する手段と、
前記抽出されたモデル形状に対応する視点を被写地物の撮影地点とする手段と、を備えたことを特徴とする被写地物の撮影位置取得装置。
【請求項1】
数値標高モデルに基づいて、写真に写された被写地物の位置又は/及び形状を特定する方法であって、
前記被写地物の形状から4点以上の特徴点を選出するとともに、これら特徴点に対して、写真平面内の任意座標系による座標を付与し、
前記数値標高モデルに基づく地表モデルを投影したモデル形状から前記特徴点に相当する点を4点以上選出するとともに、これら特徴点に相当する点に対して、モデル形状を表す平面内の任意座標系の座標を付与し、
前記被写地物の特徴点と、前記モデル形状の特徴点に相当する点とを対応させることで、写真平面内の任意座標系と、モデル形状を表す平面内の任意座標系とを関連づけ、
前記数値標高モデルに基づいて、前記被写地物に空間情報を付与し、当該被写地物の位置又は/及び形状を特定することを特徴とする被写地物の位置特定方法。
【請求項2】
数値標高モデルに基づいて、写真に写された被写地物の位置又は/及び形状を特定する方法であって、
前記被写地物の一部又は全部の形状に基づいて2次元の基準形状を作成するとともに、写真平面内の任意座標系により基準形状に座標を付与し、
前記数値標高モデルに基づく地表モデルを投影した2次元のモデル形状を作成するとともに、このモデル形状を表す平面内の任意座標系によりモデル形状に座標を付与し、
前記基準形状の構成要素と、前記モデル形状の構成要素とを対応させることで、写真平面内の任意座標系と、モデル形状を表す平面内の任意座標系とを関連づけ、
前記数値標高モデルに基づいて、前記被写地物に空間情報を付与し、当該被写地物の位置又は/及び形状を特定することを特徴とする被写地物の位置特定方法。
【請求項3】
数値標高モデルに基づいて、写真に写された被写地物の位置又は/及び形状を特定する方法であって、
前記被写地物の一部又は全部の画像に基づいて2次元の基準形状を作成するとともに、写真平面内の任意座標系により基準形状を構成する画素に座標を付与し、
画像が付与された数値標高モデルに基づく地表モデルを投影した投影画像から、2次元のモデル形状を作成するとともに、このモデル形状を表す平面内の任意座標系によりモデル形状を構成する画素に座標を付与し、
前記基準形状の画素と、前記モデル形状の画素とを対応させることで、写真平面内の任意座標系と、モデル形状を表す平面内の任意座標系とを関連づけ、
前記数値標高モデルに基づいて、前記被写地物に空間情報を付与し、当該被写地物の位置又は/及び形状を特定することを特徴とする被写地物の位置特定方法。
【請求項4】
請求項2又は請求項3記載の被写地物の位置特定方法において、
地表モデルを投影するための視点及び視角を変えることによって、複数の地表モデルを投影した形状をモデル形状候補として作成し、
前記モデル形状候補と基準形状を照合することによって、複数のモデル形状候補の中から基準形状に相当するものをモデル形状とすることを特徴とする被写地物の位置特定方法。
【請求項5】
数値標高モデルに基づいて、写真に写された被写地物の位置又は/及び形状が表示された地図であって、
請求項1乃至請求項4記載の被写地物の位置特定方法によって、位置又は/及び形状が特定された被写地物が、表示されたことを特徴とする被写地物の表示地図。
【請求項6】
写真に写された被写地物の位置又は/及び形状を、数値標高モデルに基づいて特定するプログラムであって、
請求項1乃至請求項4記載の被写地物の位置特定方法を、コンピュータに実行させることを特徴とする被写地物の位置特定プログラム。
【請求項7】
写真に写された被写地物、及び数値標高モデルに基づいて、被写地物を撮影した地点を取得する方法であって、
前記被写地物の一部又は全部の形状に基づいて2次元の基準形状を作成するとともに、写真平面内の任意座標系により基準形状に座標を付与し、
前記数値標高モデルに基づく地表モデルを投影するための視点及び視角を変えることによって、複数の地表モデルを投影した2次元の形状をモデル形状候補として作成するとともに、これらモデル形状候補を表す平面内の任意座標系によりモデル形状候補に座標を付与し、
前記モデル形状候補と基準形状を照合することによって、複数のモデル形状候補の中から基準形状に相当するものをモデル形状として抽出し、
前記抽出されたモデル形状に対応する視点を被写地物の撮影地点とすることを特徴とする撮影位置取得方法。
【請求項8】
写真に写された被写地物、及び数値標高モデルに基づいて、被写地物を撮影した地点を取得する方法であって、
前記被写地物の一部又は全部の画像に基づいて2次元の基準形状を作成するとともに、写真平面内の任意座標系により基準形状を構成する画素に座標を付与し、
前記数値標高モデルに基づく地表モデルを投影するための視点及び視角を変えることによって、複数の地表モデルを投影した投影画像から、複数の2次元の形状をモデル形状候補として作成するとともに、これらモデル形状候補を表す平面内の任意座標系によりモデル形状を構成する画素に座標を付与し、
前記モデル形状候補と基準形状を照合することによって、複数のモデル形状候補の中から基準形状に相当するものをモデル形状として抽出し、
前記抽出されたモデル形状に対応する視点を被写地物の撮影地点とすることを特徴とする撮影位置取得方法。
【請求項9】
写真に写された被写地物、及び数値標高モデルに基づいて、被写地物を撮影した地点の位置情報を取得するプログラムであって、
請求項7又は請求項8記載の撮影位置取得方法を、コンピュータに実行させることを特徴とする撮影位置取得プログラム。
【請求項10】
写真に写された被写地物、及び数値標高モデルに基づいて、被写地物を撮影した地点の位置情報を取得する装置であって、
被写地物を撮影し、この画像データを取得する手段と、
前記画像データから、請求項7又は請求項8記載の基準形状を作成する手段と、
請求項7又は請求項8記載の複数のモデル形状候補を作成する手段と、
前記モデル形状と基準形状を照合することによって、複数のモデル形状の中から基準形状に相当するものをモデル形状として抽出する手段と、
前記抽出されたモデル形状に対応する視点を被写地物の撮影地点とする手段と、を備えたことを特徴とする被写地物の撮影位置取得装置。
【図1】

【図2】

【図3】

【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】

【図11】

【図12】
【図13】

【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2012−137933(P2012−137933A)
【公開日】平成24年7月19日(2012.7.19)
【国際特許分類】
【出願番号】特願2010−289847(P2010−289847)
【出願日】平成22年12月27日(2010.12.27)
【出願人】(390023249)国際航業株式会社 (55)
【Fターム(参考)】
【公開日】平成24年7月19日(2012.7.19)
【国際特許分類】
【出願日】平成22年12月27日(2010.12.27)
【出願人】(390023249)国際航業株式会社 (55)
【Fターム(参考)】
[ Back to top ]