
被搬送オブジェクトの間隔制御装置および方法
一実施形態において、オブジェクト・コンベヤによって運ばれるオブジェクトの間隔を制御するための装置は、退避状態から伸張状態に作動させることができるフライト(30)を備え、当該フライトが、伸張状態において、オブジェクト・コンベヤ(12)を横切って伸張するとともに、当該フライトがオブジェクト(O)の進行を制限してそれらオブジェクトの相対的な間隔を制御する。また、退避したフライトが、本来なら伸張することとなる空間を占有する直ぐ隣のオブジェクトと接触したときに、伸張しないように、相対的に小さな力でフライトが作動する。
【発明の詳細な説明】
【技術分野】
【0001】
本願は、発明の名称を“Systems And Methods For Providing An Improved Timing Conveyor”とする2006年12月14日に出願された同時係属中の米国特許出願第11/610,737号の一部継続出願であり、この米国特許出願第11/610,737号は、発明の名称を“Systems and Methods for Providing An Improved Timing Conveyor”とする2005年8月15日に出願された米国特許出願第11/203,711号の一部継続出願であり、両出願は、参照により本明細書に完全に援用されるものである。
【背景技術】
【0002】
多くの場合、コンベヤベルトの進行方向に沿って予め決定された間隔を有するように被搬送オブジェクトを配置することが望ましい。上記間隔によって、複数の搬送レーンから単一レーンへのオブジェクトの合流などの後処理プロセスが可能となる。
【0003】
被搬送オブジェクトの間隔を制御するための様々なシステムが知られている。そのようなシステムの幾つかは、センサと、このセンサによって検出された情報に応答して制御される選択的に作動可能な止め具(stop)とを使用する。しかしながら、それらシステムは比較的複雑であり、オブジェクトの搬送速度を大幅に制限する可能性がある。
【0004】
その他の知られたシステムは、センサで制御されない止め具を使用する。センサ制御されるシステムより複雑ではないが、それらシステムの止め具は、少なくとも断続的に、被搬送オブジェクトに損傷を与える可能性が高い。例えば、被搬送オブジェクトは、部分的に伸張された止め具と衝突したときや、搬送路に既に存在するオブジェクトに対して止め具が無理矢理に開けられたときに、破裂または変形する可能性がある。
【図面の簡単な説明】
【0005】
開示される装置および方法は、以下の図面を参照することにより、より良く理解することができる。図面中の構成要素は必ずしも同じ縮尺で描かれてはいない。
【0006】
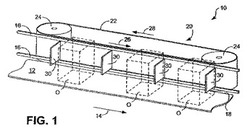
【図1】図1は、被搬送オブジェクトの間隔を制御するシステムの第1実施形態の概略斜視図である。
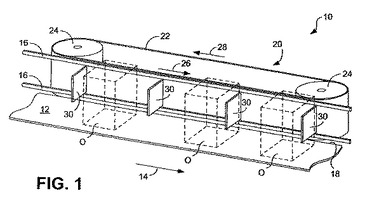
【図2】図2は、図1に示すオブジェクト間隔制御装置の一実施形態の平面図である。
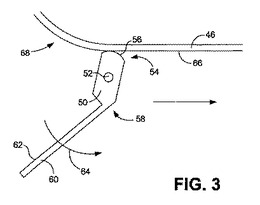
【図3】図3は、図2の装置のフライトの動作を示す詳細図である。
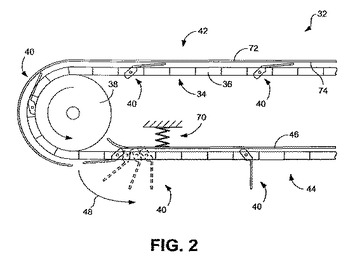
【図4】図4は、図2の装置の概略平面図であり、被搬送オブジェクトの間隔の制御における装置の使用を示している。
【図5】図5は、被搬送オブジェクトの存在下で、図2の装置のフライトの制限された動作を示す詳細図である。
【図6】図6は、オブジェクト間隔制御装置を実装する搬送システムの概略平面図である。
【図7】図7は、被搬送オブジェクトの間隔を制御するシステムの第2実施形態の概略側面図である。
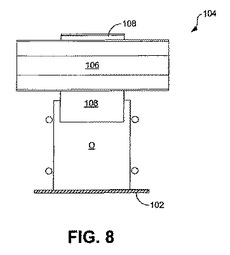
【図8】図8は、図7のシステムの概略端面図である。
【0007】
[詳細な説明]
以下に、コンベヤにより移送されるオブジェクトの間隔を制御するフライト(flights)を用いた装置および方法を記載する。少なくとも幾つかの実施形態において、フライトは、ベルトからポップアップする(飛び出す)ように設計されており、それらは、オブジェクト間隔を制御するのに必要なときに取り付けられるものである。そのような場合、フライトは、ベルトの平面に対してほぼ平行となる退避状態から、ベルトの平面に対してほぼ垂直となる伸張状態へと移行することができる。フライトが常に伸張状態にあるわけではないので、被搬送オブジェクトがフライトに衝突する可能性は減少する。少なくとも幾つかの実施形態において、フライトは、“低トルク”フライトであり、それは、それらフライトが相対的に小さい力で開き、そのため、フライトが本来なら開く空間内にオブジェクトが占有するときにフライトが開くことはなく、それにより、被搬送オブジェクトに損傷を与える可能性をさらに低減することを意味している。
【0008】
以下に、装置および方法の様々な実施形態を開示する。特定の実施形態が提示されるが、それら実施形態は、開示の装置および方法の単なる実施例であり、その他の実施形態も可能であることに留意されたい。そのような実施形態のすべては、本開示の範囲内に入ることが意図されている。
【0009】
図面において、同様の符号は対応する構成要素を特定しており、その図面を参照すると、図1は、搬送される様々なオブジェクトの間隔を制御するのに使用できるオブジェクト間隔形成システム10の一実施形態を概略的に示している。図1に示すように、システム10は、矢印14により示されるベルトの進行方向にオブジェクトOを移送および支持する、水平方向に向けられたコンベヤベルト12を備える。コンベヤベルト12の具体的構成は比較的重要ではない。しかしながら、コンベヤベルト12の表面の材料は、オブジェクトOがコンベヤベルト表面の上を滑って、互いの間隔を相対的に調整できるように、選択するのが望ましい。ある実施形態において、コンベヤベルト12は、連続的なゴム製のコンベヤベルトまたはその同等物を備える。他の実施形態において、ベルト12は、複数のプラスチックおよび/または金属の部分またはリンクを有し、それらが互いに連結されて連続ベルトを形成するチェーン型のベルトを備える。
【0010】
図1にさらに示すように、システム10は、コンベヤベルト12の外側縁18に隣接して配置される1またはそれ以上のガイドレール16を備えることができる。そのようなレール16を設けた場合、当該レール16は、オブジェクトOの横方向の位置を保持するとともに、コンベヤベルト12からオブジェクトOが倒れるのを防止する。コンベヤベルト12の一方の縁に沿ってのみガイドレール16を設けるものとして示したが、必要な場合には、同様のガイドレールをベルトの他方に沿って設けることも可能である。しかしながら、システム10のその他の細部構造を遮ることを避けるために、そのような追加的なガイドレールは図1には示されていない。
【0011】
また、コンベヤベルト12の縁18に隣接する位置には、オブジェクト間隔制御装置20も配置されている。オブジェクト間隔制御装置20は、通常は、コンベヤベルト12によって搬送されるオブジェクトOの間隔を制御する働きをする。そのような間隔制御は、複数のコンベヤラインの1つのコンベヤラインへの合流など、様々な用途のタイミングの観点から非常に重要であることから、オブジェクト間隔制御装置20はタイミング装置とみなすこともできる。
【0012】
図1の実施形態において、間隔制御装置20は、鉛直方向に向けられたコンベヤベルト22を作動する、鉛直方向に向けられたコンベヤを備える。この開示の記載において、“鉛直方向に向けられた”という表現は、コンベヤがコンベヤベルト12のように水平方向を向く場合にオブジェクトを搬送するのに本来使用されることとなるコンベヤベルト22の表面が、鉛直であることを意味している。より具体的には、コンベヤベルト22の外面が実質的に鉛直平面内に位置するといえる。その鉛直の方向付けのため、図1において符号20により特定されるコンベヤは、この点から言うと、コンベヤベルト12に対して一般に直交し、そのため、コンベヤベルト22の表面が、コンベヤベルト12の表面から約90度変位されている。
【0013】
図1をさらに参照すると、コンベヤベルト22は駆動されるとともに、少なくとも部分的に、スプロケット24によって支持される。図示のように、スプロケット24は、矢印26,28によって示される方向にコンベヤベルト22を駆動し、その結果、オブジェクトOに隣接するコンベヤベルトの一部が、コンベヤベルト12と同じ方向、すなわちオブジェクトと同じ方向に移動する。しかしながら、少なくとも幾つかの実施形態において、コンベヤベルト22は、コンベヤベルト12よりも遅い線速度で作動されて、それにより間隔制御機能を可能としている。
【0014】
図1にさらに示すように、コンベヤベルト22は、オブジェクトOの進行を制限してそれらの相対的な間隔を制御する“止め具”として働く複数のフライト30を備える。少なくとも幾つかの実施形態において、フライト30はポップアップ形式のフライトであり、これは、それらフライトがコンベヤベルト22の面と実質的に平行または同一平面に位置する退避位置から、コンベヤベルト22の面と実質的に垂直に位置する伸張位置まで移行できることを意味している。図1に示されるフライト30の各々は、伸張状態にある。このため、ベルトコンベヤ12に隣接して配置されるフライト30の各々が、ベルト進行方向14に対して垂直なコンベヤベルト12の幅方向に横切って伸びている。図1に示すように、フライト30は、コンベヤベルト12の全幅を横切って延びる必要はない。その代わりに、フライト30は、例えばベルト12の幅の約半分など、幅の一部のみを横切って延びるものであってもよい。図1に示す実施形態において、フライト30は、支持レール16の間においてコンベヤベルト12を横切って延びる。より詳細には、フライト30は、レールを含む任意の潜在的な障害物を避けるように向けられ、構成されている。
【0015】
以下に詳述するように、コンベヤ20は、コンベヤベルト12によって運ばれるオブジェクトOの間隔を制御する働きをする。特に、コンベヤベルト12の長手方向に沿って不規則な間隔を有するオブジェクトは、フライト30により“止められる”ことが可能であり、それらフライトは、コンベヤベルトの速度よりも遅い速度、すなわちオブジェクトの速度よりも遅い速度で進行する。各オブジェクトOはフライト30で途切れることとなるため、各オブジェクトは、フライトの相対的間隔と等しい相対的間隔を有するようにコンベヤベルト12上に配置される。
【0016】
図2は、図1の間隔制御装置20の可能性のある構成を反映した間隔制御装置32を示している。図2に示すように、装置32はコンベヤベルト34を備える。この実施形態において、コンベヤベルト34は、チェーン式のコンベヤベルトであり、これは、複数の部分またはリンク36からなり、それらが互いに結合されて連続的なベルトを形成するようになっている。コンベヤベルト34はスプロケット38(図2にはスプロケットが1つのみ示される)によって駆動される。コンベヤベルト34の長手方向に沿って予め設定された位置、例えば予め設定されたリンク36内に、ポップアップフライト40が設けられている。図2に示すように、ポップアップフライト40は、装置32の背面42に沿う退避状態と、間隔が制御されることとなるオブジェクトを運ぶコンベヤベルトを向く装置の前面44に沿う伸張状態とに向けられる。背面42と前面44との間の装置32内には、フライト作動機構46が配置され、当該機構が、フライト40を作動させて、それらを退避状態から伸張状態に移行させるために使用される。図2の実施形態において、作動機構46は、装置32の前面44にフライト40が接近したときにフライト40が接触する接触面を与えるプレート部材を備える。フライト作動の順序は、装置32の前面44の左端に位置するフライト40により、図2に示されている。図示のように、フライト40は最初は退避状態から始まる。そして、フライト40が作動機構46との接触を持つと、フライトと作動機構との間の摩擦力により、矢印48によって示される方向に、フライトが回動する。フライト40は、フライトが伸張状態に配置されるまで回動を続け、伸張状態において、フライトの作動面が、コンベヤベルト34の外面およびオブジェクトの進行方向に対してほぼ垂直となる。特に、フライト40および/またはコンベヤベルト34は、フライトの更なる回動を制限するように構成されている。このため、少なくとも幾つかの実施形態においては、フライト40を、その作動面が垂直な向きを越えて配置される位置まで回動させることはできない。
【0017】
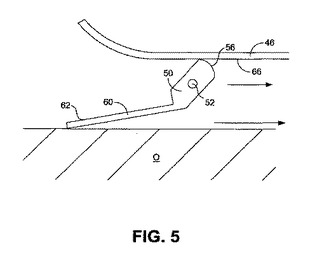
図3は、フライト40の構成例を示すとともに、フライトの動作を示している。図3に示すように、フライト40は、本体50を備えるようにしてもよく、当該本体は、略矩形の断面を有するとともに、開口部52を備え、当該開口部がフライトの幅方向に延び、フライトの回動軸を規定している。開口部52は、フライト40をコンベヤベルト34、例えば、コンベヤベルトの1またはそれ以上のリンク36に取り付けるために使用される1またはそれ以上のシャフトまたはロッド(図示省略)を受け入れるように構成されている。本体50の第1端部54は、作動機構46と相互作用するように構成されたカム面56を備える。ある実施形態において、カム面56は、一定の曲率半径を有する曲面である。他の実施形態において、カム面56は、変化する曲率半径を有する曲面である。さらに別の実施形態において、カム面56は、1またはそれ以上の平坦面を備えることができる。本体50は、第2端部58をさらに備え、そこからほぼ平面的な止め部材60が延びている。止め部材60は、典型的には、フライト40が使用されてオブジェクトの進行を制限するときにオブジェクトを途切れさせるほぼ平坦な作動面62を備える。図3に示すように、止め部材60は、ある角度、例えば約45度の角度で、本体50から延びるものであってもよい。
【0018】
ある実施形態において、フライト40は、単一の材料から一体に作られている。他の実施形態において、フライト40は、例えば本体50と止め部材60のように、別個のパーツを備え、それらが互いに結合されて一体的な構成要素を形成するものとなっている。何れの場合にも、カム面56の材料は、フライト40が相対的に小さな力で(矢印64の方向に)回転するように、比較的低摩擦な材料となっている。開示目的のために、用語“相対的に小さな力”とは、フライトが本来なら開くこととなる空間にオブジェクトが存在しないときだけフライト40を開くのに十分な力を意味する。よって、フライトは、すぐ隣のオブジェクトに遭遇するときに開くことはなく、それによりオブジェクトの損傷を回避することができる。かかる結果は、作動機構46の接触面66に比較的底摩擦の材料を選択することによっても促進することができる。ある実施形態において、カム面56と接触面66との間の摩擦力は、フライト40を退避状態に維持する摩擦および/または重力を乗り越えるのに必要なだけの大きさである。一例として、カム面56と接触面66の一方または両方は、金属またはプラスチック材料を備える。ある実施形態において、カム面56と接触面66の一方または両方は、UHMW、アセタール、Delrin(登録商標)樹脂またはその他の滑らかなプラスチックを備えることができる。
【0019】
図3にさらに示すように、作動機構46は、フライト40と作動機構との間の緩やかな接触を容易にする遷移領域68を備える。作動機構46がプレート部材を備える実施形態において、遷移領域68は、プレート部材の丸みを帯びた部分または角の付いた部分を備えることができる。
【0020】
図2に戻ると、作動機構46は、フライト40と作動機構との間に軽い接触のみが行われて、相対的に小さな力でフライトがさらに確実に作動できるように、装置32内に配置および/または設置されている。図2に示すように、装置32は、作動機構46がフライト40によって伝達される力の下で“付勢(give)”することを可能にする1またはそれ以上のバネ70を含むことができる。他の実施形態において、バネは設けられていないが、作動機構46自体が、フライト40によって伝達される力の下で付勢を可能にするバネのような性質を備える。例えば、作動機構46がプレート部材を備える実施形態において、プレート部材は、フライト40を受け入れるために内側に曲がるように、比較的薄くして、例えば金属またはプラスチックのような柔軟材料で構成することができる。
【0021】
図2にさらに示すように、間隔制御装置32は、フライト退避機構72をさらに備えることができる。図2の実施形態において、退避機構72は、レールを備えることができ、当該レールが、装置32の少なくとも一部に付随するとともに、内面74を有し、当該内面が、フライト40を退避状態に押し戻してフライトが伸張状態に移行するのを防止するようになっている。退避機構72により、フライト40は、それらが装置32の前面44に達するまで退避状態のまま維持され、その結果、接近して来るオブジェクトが部分的に伸張するフライトに衝突するという状況を避けることができる。図2に示すように、退避機構72は、かかる衝突を確実に回避するように、装置32の上流側の端部に配置することができる。
【0022】
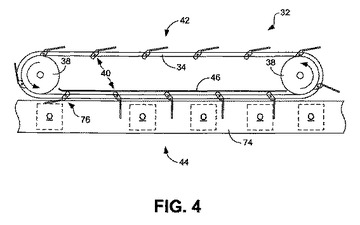
オブジェクトの存在に関係なくフライトが伸張する状況は、回避することができる。図4および5は、その原理を示している。図4から始めると、相対的に速く動くコンベヤベルト74により支持されたオブジェクトOの進行を制限するために、間隔制御装置32のフライト40が作動されることが分かる。そのようにオブジェクトOの進行を制限することによって、フライト40が互いに離して配置されるのと同じ距離、オブジェクトは互いに離して配置される。しかしながら、フライト40の作動は、オブジェクトOがフライトと直ぐに隣接するときには、起こらない。その機能は、図4の最も左のオブジェクトOにより示されている。この図に示すように、直ぐ隣のフライト76は、オブジェクトOの存在により完全に開かない。図5は、フライト76と隣接オブジェクトOとの間の相互作用の詳細図であるが、この図に示すように、フライトは作動機構46と接触しているかどうかに関わらず開かないことに留意されたい。その代わりに、フライト76のカム面56は、少なくとも一部の理由として、カム面と接触面の少なくとも一方に比較的低摩擦の材料が使用されることにより、作動機構46の接触面66に沿って単に摺動する。作動機構を装置32内に取り付けるために使用される構成要素または作動機構46内に組み込まれる任意の“付勢”によって、フライトの開放防止をさらに促進することができる。オブジェクトOの存在下でフライト76が開放しないため、オブジェクトは損傷を受けない。再び図4を参照すると、オブジェクトがフライトよりも大きい速度で進行するため、オブジェクトOは結局、フライト76を通り越すこととなる。オブジェクトOが通り過ぎると、フライト76は伸張状態に開いて、ベルト74により運ばれる次のオブジェクトの進行を制限する準備が整うこととなる。
【0023】
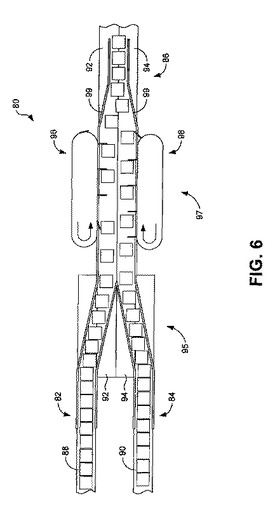
図6は、上述した種類の間隔制御装置についての適用例を示している。より詳細には、図6は、2本のコンベヤライン82,84を単一のコンベヤライン86に集約または統合するコンベヤシステム80を示している。このようなマージ処理において、各ライン82,84のオブジェクトは、先ず、進行方向に沿って予め設定された距離分、間隔を空けて配置されるとともに、互いに相対的にずらして配置される。以下に、システム80によって運ばれるオブジェクトのフローを、上流(左)から下流(右)へと記載することとする。
【0024】
オブジェクト(正方形によって示される)は、先ず、コンベヤベルト88および90によってそれぞれライン82,84に沿って移送され、その後、移行領域95において、それぞれコンベヤベルト92および94上に徐々に移行される。コンベヤベルト92,94は、コンベヤベルト88,90よりも非常に速い速度で進行する。一例として、コンベヤベルト92,94は、コンベヤベルト88,90の2.5倍の速さで進行する。
【0025】
移行領域95を離れると、オブジェクトは、間隔制御領域97に進入し、そこには、2つの間隔制御装置96および98が設けられ、それぞれがオブジェクトの各ライン82,84用とされている。装置96,98は、上述したように、オブジェクトの進行を制限して、それらの相対的な間隔を制御する。特に、装置96,98のフライトは、互いに相対的にずらして配置され、その結果、各ライン82,84のオブジェクトが同様に、互いに相対的にずらして配置されることとなる。オブジェクトが間隔を空けてずらして配置されると、各ライン82,84からのオブジェクトが、オブジェクトを中央に移すガイドレール99の使用により、ライン86内に合流される。
【0026】
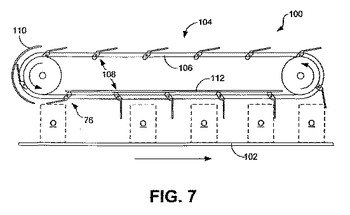
図7および8は、搬送されたオブジェクトの間隔を制御するためのシステム100の第2実施形態を示している。このシステム100は、図2および4に示されるシステム10と幾つかの点で類似している。例えば、システム100は、間隔が制御されることとなるオブジェクトOを搬送するコンベヤベルト102と、オブジェクト間隔制御装置32とデザインおよび機能において類似するオブジェクト間隔制御装置104とを備える。すなわち、装置104は、退避状態から伸張状態に移行可能な複数のフライト108を支持する独自のコンベヤベルト106を備える。さらに、装置104は、フライトを伸張するのが望ましくなるまで、退避状態でフライト108を少なくとも維持する退避機構110を備える。しかしながら、このシステム100において、装置104は、水平方向に向けられるとともに、コンベヤベルト102の上方に配置され、それにより、フライト108が下方に延びてオブジェクトOの上端部と相互作用してその進行を制限するようになっている。
【0027】
少なくとも幾つかの実施形態において、フライト108は、重力によって少なくとも部分的に作動される。すなわち、フライト108は、退避機構110を通過すると、自由に下方に反転して、それらがコンベヤベルト106およびコンベヤベルト102の双方と実質的に垂直となる位置に至る。かかる場合、フライト108を開く力は、フライトの質量に比例し、相対的に軽量のフライトの場合、その力が相対的に弱くなる。そのため、オブジェクトOが、未だ完全に伸張していないフライト108の直ぐ下に配置されるとき、フライトは、オブジェクトとの接触を持つ地点を越えて伸張することはなく、オブジェクトに損傷を与えるのに十分な程度の力をオブジェクト上に及ぼすことはない。しかしながら、オブジェクトOがフライト108を通過すると、フライトは自由に降下して伸張状態となる。
【0028】
図7に示すように、重力がフライト108を確実に開くには十分に大きくない場合において、装置104は任意には、フライト作動機構112を含むようにしてもよい。
【技術分野】
【0001】
本願は、発明の名称を“Systems And Methods For Providing An Improved Timing Conveyor”とする2006年12月14日に出願された同時係属中の米国特許出願第11/610,737号の一部継続出願であり、この米国特許出願第11/610,737号は、発明の名称を“Systems and Methods for Providing An Improved Timing Conveyor”とする2005年8月15日に出願された米国特許出願第11/203,711号の一部継続出願であり、両出願は、参照により本明細書に完全に援用されるものである。
【背景技術】
【0002】
多くの場合、コンベヤベルトの進行方向に沿って予め決定された間隔を有するように被搬送オブジェクトを配置することが望ましい。上記間隔によって、複数の搬送レーンから単一レーンへのオブジェクトの合流などの後処理プロセスが可能となる。
【0003】
被搬送オブジェクトの間隔を制御するための様々なシステムが知られている。そのようなシステムの幾つかは、センサと、このセンサによって検出された情報に応答して制御される選択的に作動可能な止め具(stop)とを使用する。しかしながら、それらシステムは比較的複雑であり、オブジェクトの搬送速度を大幅に制限する可能性がある。
【0004】
その他の知られたシステムは、センサで制御されない止め具を使用する。センサ制御されるシステムより複雑ではないが、それらシステムの止め具は、少なくとも断続的に、被搬送オブジェクトに損傷を与える可能性が高い。例えば、被搬送オブジェクトは、部分的に伸張された止め具と衝突したときや、搬送路に既に存在するオブジェクトに対して止め具が無理矢理に開けられたときに、破裂または変形する可能性がある。
【図面の簡単な説明】
【0005】
開示される装置および方法は、以下の図面を参照することにより、より良く理解することができる。図面中の構成要素は必ずしも同じ縮尺で描かれてはいない。
【0006】
【図1】図1は、被搬送オブジェクトの間隔を制御するシステムの第1実施形態の概略斜視図である。
【図2】図2は、図1に示すオブジェクト間隔制御装置の一実施形態の平面図である。
【図3】図3は、図2の装置のフライトの動作を示す詳細図である。
【図4】図4は、図2の装置の概略平面図であり、被搬送オブジェクトの間隔の制御における装置の使用を示している。
【図5】図5は、被搬送オブジェクトの存在下で、図2の装置のフライトの制限された動作を示す詳細図である。
【図6】図6は、オブジェクト間隔制御装置を実装する搬送システムの概略平面図である。
【図7】図7は、被搬送オブジェクトの間隔を制御するシステムの第2実施形態の概略側面図である。
【図8】図8は、図7のシステムの概略端面図である。
【0007】
[詳細な説明]
以下に、コンベヤにより移送されるオブジェクトの間隔を制御するフライト(flights)を用いた装置および方法を記載する。少なくとも幾つかの実施形態において、フライトは、ベルトからポップアップする(飛び出す)ように設計されており、それらは、オブジェクト間隔を制御するのに必要なときに取り付けられるものである。そのような場合、フライトは、ベルトの平面に対してほぼ平行となる退避状態から、ベルトの平面に対してほぼ垂直となる伸張状態へと移行することができる。フライトが常に伸張状態にあるわけではないので、被搬送オブジェクトがフライトに衝突する可能性は減少する。少なくとも幾つかの実施形態において、フライトは、“低トルク”フライトであり、それは、それらフライトが相対的に小さい力で開き、そのため、フライトが本来なら開く空間内にオブジェクトが占有するときにフライトが開くことはなく、それにより、被搬送オブジェクトに損傷を与える可能性をさらに低減することを意味している。
【0008】
以下に、装置および方法の様々な実施形態を開示する。特定の実施形態が提示されるが、それら実施形態は、開示の装置および方法の単なる実施例であり、その他の実施形態も可能であることに留意されたい。そのような実施形態のすべては、本開示の範囲内に入ることが意図されている。
【0009】
図面において、同様の符号は対応する構成要素を特定しており、その図面を参照すると、図1は、搬送される様々なオブジェクトの間隔を制御するのに使用できるオブジェクト間隔形成システム10の一実施形態を概略的に示している。図1に示すように、システム10は、矢印14により示されるベルトの進行方向にオブジェクトOを移送および支持する、水平方向に向けられたコンベヤベルト12を備える。コンベヤベルト12の具体的構成は比較的重要ではない。しかしながら、コンベヤベルト12の表面の材料は、オブジェクトOがコンベヤベルト表面の上を滑って、互いの間隔を相対的に調整できるように、選択するのが望ましい。ある実施形態において、コンベヤベルト12は、連続的なゴム製のコンベヤベルトまたはその同等物を備える。他の実施形態において、ベルト12は、複数のプラスチックおよび/または金属の部分またはリンクを有し、それらが互いに連結されて連続ベルトを形成するチェーン型のベルトを備える。
【0010】
図1にさらに示すように、システム10は、コンベヤベルト12の外側縁18に隣接して配置される1またはそれ以上のガイドレール16を備えることができる。そのようなレール16を設けた場合、当該レール16は、オブジェクトOの横方向の位置を保持するとともに、コンベヤベルト12からオブジェクトOが倒れるのを防止する。コンベヤベルト12の一方の縁に沿ってのみガイドレール16を設けるものとして示したが、必要な場合には、同様のガイドレールをベルトの他方に沿って設けることも可能である。しかしながら、システム10のその他の細部構造を遮ることを避けるために、そのような追加的なガイドレールは図1には示されていない。
【0011】
また、コンベヤベルト12の縁18に隣接する位置には、オブジェクト間隔制御装置20も配置されている。オブジェクト間隔制御装置20は、通常は、コンベヤベルト12によって搬送されるオブジェクトOの間隔を制御する働きをする。そのような間隔制御は、複数のコンベヤラインの1つのコンベヤラインへの合流など、様々な用途のタイミングの観点から非常に重要であることから、オブジェクト間隔制御装置20はタイミング装置とみなすこともできる。
【0012】
図1の実施形態において、間隔制御装置20は、鉛直方向に向けられたコンベヤベルト22を作動する、鉛直方向に向けられたコンベヤを備える。この開示の記載において、“鉛直方向に向けられた”という表現は、コンベヤがコンベヤベルト12のように水平方向を向く場合にオブジェクトを搬送するのに本来使用されることとなるコンベヤベルト22の表面が、鉛直であることを意味している。より具体的には、コンベヤベルト22の外面が実質的に鉛直平面内に位置するといえる。その鉛直の方向付けのため、図1において符号20により特定されるコンベヤは、この点から言うと、コンベヤベルト12に対して一般に直交し、そのため、コンベヤベルト22の表面が、コンベヤベルト12の表面から約90度変位されている。
【0013】
図1をさらに参照すると、コンベヤベルト22は駆動されるとともに、少なくとも部分的に、スプロケット24によって支持される。図示のように、スプロケット24は、矢印26,28によって示される方向にコンベヤベルト22を駆動し、その結果、オブジェクトOに隣接するコンベヤベルトの一部が、コンベヤベルト12と同じ方向、すなわちオブジェクトと同じ方向に移動する。しかしながら、少なくとも幾つかの実施形態において、コンベヤベルト22は、コンベヤベルト12よりも遅い線速度で作動されて、それにより間隔制御機能を可能としている。
【0014】
図1にさらに示すように、コンベヤベルト22は、オブジェクトOの進行を制限してそれらの相対的な間隔を制御する“止め具”として働く複数のフライト30を備える。少なくとも幾つかの実施形態において、フライト30はポップアップ形式のフライトであり、これは、それらフライトがコンベヤベルト22の面と実質的に平行または同一平面に位置する退避位置から、コンベヤベルト22の面と実質的に垂直に位置する伸張位置まで移行できることを意味している。図1に示されるフライト30の各々は、伸張状態にある。このため、ベルトコンベヤ12に隣接して配置されるフライト30の各々が、ベルト進行方向14に対して垂直なコンベヤベルト12の幅方向に横切って伸びている。図1に示すように、フライト30は、コンベヤベルト12の全幅を横切って延びる必要はない。その代わりに、フライト30は、例えばベルト12の幅の約半分など、幅の一部のみを横切って延びるものであってもよい。図1に示す実施形態において、フライト30は、支持レール16の間においてコンベヤベルト12を横切って延びる。より詳細には、フライト30は、レールを含む任意の潜在的な障害物を避けるように向けられ、構成されている。
【0015】
以下に詳述するように、コンベヤ20は、コンベヤベルト12によって運ばれるオブジェクトOの間隔を制御する働きをする。特に、コンベヤベルト12の長手方向に沿って不規則な間隔を有するオブジェクトは、フライト30により“止められる”ことが可能であり、それらフライトは、コンベヤベルトの速度よりも遅い速度、すなわちオブジェクトの速度よりも遅い速度で進行する。各オブジェクトOはフライト30で途切れることとなるため、各オブジェクトは、フライトの相対的間隔と等しい相対的間隔を有するようにコンベヤベルト12上に配置される。
【0016】
図2は、図1の間隔制御装置20の可能性のある構成を反映した間隔制御装置32を示している。図2に示すように、装置32はコンベヤベルト34を備える。この実施形態において、コンベヤベルト34は、チェーン式のコンベヤベルトであり、これは、複数の部分またはリンク36からなり、それらが互いに結合されて連続的なベルトを形成するようになっている。コンベヤベルト34はスプロケット38(図2にはスプロケットが1つのみ示される)によって駆動される。コンベヤベルト34の長手方向に沿って予め設定された位置、例えば予め設定されたリンク36内に、ポップアップフライト40が設けられている。図2に示すように、ポップアップフライト40は、装置32の背面42に沿う退避状態と、間隔が制御されることとなるオブジェクトを運ぶコンベヤベルトを向く装置の前面44に沿う伸張状態とに向けられる。背面42と前面44との間の装置32内には、フライト作動機構46が配置され、当該機構が、フライト40を作動させて、それらを退避状態から伸張状態に移行させるために使用される。図2の実施形態において、作動機構46は、装置32の前面44にフライト40が接近したときにフライト40が接触する接触面を与えるプレート部材を備える。フライト作動の順序は、装置32の前面44の左端に位置するフライト40により、図2に示されている。図示のように、フライト40は最初は退避状態から始まる。そして、フライト40が作動機構46との接触を持つと、フライトと作動機構との間の摩擦力により、矢印48によって示される方向に、フライトが回動する。フライト40は、フライトが伸張状態に配置されるまで回動を続け、伸張状態において、フライトの作動面が、コンベヤベルト34の外面およびオブジェクトの進行方向に対してほぼ垂直となる。特に、フライト40および/またはコンベヤベルト34は、フライトの更なる回動を制限するように構成されている。このため、少なくとも幾つかの実施形態においては、フライト40を、その作動面が垂直な向きを越えて配置される位置まで回動させることはできない。
【0017】
図3は、フライト40の構成例を示すとともに、フライトの動作を示している。図3に示すように、フライト40は、本体50を備えるようにしてもよく、当該本体は、略矩形の断面を有するとともに、開口部52を備え、当該開口部がフライトの幅方向に延び、フライトの回動軸を規定している。開口部52は、フライト40をコンベヤベルト34、例えば、コンベヤベルトの1またはそれ以上のリンク36に取り付けるために使用される1またはそれ以上のシャフトまたはロッド(図示省略)を受け入れるように構成されている。本体50の第1端部54は、作動機構46と相互作用するように構成されたカム面56を備える。ある実施形態において、カム面56は、一定の曲率半径を有する曲面である。他の実施形態において、カム面56は、変化する曲率半径を有する曲面である。さらに別の実施形態において、カム面56は、1またはそれ以上の平坦面を備えることができる。本体50は、第2端部58をさらに備え、そこからほぼ平面的な止め部材60が延びている。止め部材60は、典型的には、フライト40が使用されてオブジェクトの進行を制限するときにオブジェクトを途切れさせるほぼ平坦な作動面62を備える。図3に示すように、止め部材60は、ある角度、例えば約45度の角度で、本体50から延びるものであってもよい。
【0018】
ある実施形態において、フライト40は、単一の材料から一体に作られている。他の実施形態において、フライト40は、例えば本体50と止め部材60のように、別個のパーツを備え、それらが互いに結合されて一体的な構成要素を形成するものとなっている。何れの場合にも、カム面56の材料は、フライト40が相対的に小さな力で(矢印64の方向に)回転するように、比較的低摩擦な材料となっている。開示目的のために、用語“相対的に小さな力”とは、フライトが本来なら開くこととなる空間にオブジェクトが存在しないときだけフライト40を開くのに十分な力を意味する。よって、フライトは、すぐ隣のオブジェクトに遭遇するときに開くことはなく、それによりオブジェクトの損傷を回避することができる。かかる結果は、作動機構46の接触面66に比較的底摩擦の材料を選択することによっても促進することができる。ある実施形態において、カム面56と接触面66との間の摩擦力は、フライト40を退避状態に維持する摩擦および/または重力を乗り越えるのに必要なだけの大きさである。一例として、カム面56と接触面66の一方または両方は、金属またはプラスチック材料を備える。ある実施形態において、カム面56と接触面66の一方または両方は、UHMW、アセタール、Delrin(登録商標)樹脂またはその他の滑らかなプラスチックを備えることができる。
【0019】
図3にさらに示すように、作動機構46は、フライト40と作動機構との間の緩やかな接触を容易にする遷移領域68を備える。作動機構46がプレート部材を備える実施形態において、遷移領域68は、プレート部材の丸みを帯びた部分または角の付いた部分を備えることができる。
【0020】
図2に戻ると、作動機構46は、フライト40と作動機構との間に軽い接触のみが行われて、相対的に小さな力でフライトがさらに確実に作動できるように、装置32内に配置および/または設置されている。図2に示すように、装置32は、作動機構46がフライト40によって伝達される力の下で“付勢(give)”することを可能にする1またはそれ以上のバネ70を含むことができる。他の実施形態において、バネは設けられていないが、作動機構46自体が、フライト40によって伝達される力の下で付勢を可能にするバネのような性質を備える。例えば、作動機構46がプレート部材を備える実施形態において、プレート部材は、フライト40を受け入れるために内側に曲がるように、比較的薄くして、例えば金属またはプラスチックのような柔軟材料で構成することができる。
【0021】
図2にさらに示すように、間隔制御装置32は、フライト退避機構72をさらに備えることができる。図2の実施形態において、退避機構72は、レールを備えることができ、当該レールが、装置32の少なくとも一部に付随するとともに、内面74を有し、当該内面が、フライト40を退避状態に押し戻してフライトが伸張状態に移行するのを防止するようになっている。退避機構72により、フライト40は、それらが装置32の前面44に達するまで退避状態のまま維持され、その結果、接近して来るオブジェクトが部分的に伸張するフライトに衝突するという状況を避けることができる。図2に示すように、退避機構72は、かかる衝突を確実に回避するように、装置32の上流側の端部に配置することができる。
【0022】
オブジェクトの存在に関係なくフライトが伸張する状況は、回避することができる。図4および5は、その原理を示している。図4から始めると、相対的に速く動くコンベヤベルト74により支持されたオブジェクトOの進行を制限するために、間隔制御装置32のフライト40が作動されることが分かる。そのようにオブジェクトOの進行を制限することによって、フライト40が互いに離して配置されるのと同じ距離、オブジェクトは互いに離して配置される。しかしながら、フライト40の作動は、オブジェクトOがフライトと直ぐに隣接するときには、起こらない。その機能は、図4の最も左のオブジェクトOにより示されている。この図に示すように、直ぐ隣のフライト76は、オブジェクトOの存在により完全に開かない。図5は、フライト76と隣接オブジェクトOとの間の相互作用の詳細図であるが、この図に示すように、フライトは作動機構46と接触しているかどうかに関わらず開かないことに留意されたい。その代わりに、フライト76のカム面56は、少なくとも一部の理由として、カム面と接触面の少なくとも一方に比較的低摩擦の材料が使用されることにより、作動機構46の接触面66に沿って単に摺動する。作動機構を装置32内に取り付けるために使用される構成要素または作動機構46内に組み込まれる任意の“付勢”によって、フライトの開放防止をさらに促進することができる。オブジェクトOの存在下でフライト76が開放しないため、オブジェクトは損傷を受けない。再び図4を参照すると、オブジェクトがフライトよりも大きい速度で進行するため、オブジェクトOは結局、フライト76を通り越すこととなる。オブジェクトOが通り過ぎると、フライト76は伸張状態に開いて、ベルト74により運ばれる次のオブジェクトの進行を制限する準備が整うこととなる。
【0023】
図6は、上述した種類の間隔制御装置についての適用例を示している。より詳細には、図6は、2本のコンベヤライン82,84を単一のコンベヤライン86に集約または統合するコンベヤシステム80を示している。このようなマージ処理において、各ライン82,84のオブジェクトは、先ず、進行方向に沿って予め設定された距離分、間隔を空けて配置されるとともに、互いに相対的にずらして配置される。以下に、システム80によって運ばれるオブジェクトのフローを、上流(左)から下流(右)へと記載することとする。
【0024】
オブジェクト(正方形によって示される)は、先ず、コンベヤベルト88および90によってそれぞれライン82,84に沿って移送され、その後、移行領域95において、それぞれコンベヤベルト92および94上に徐々に移行される。コンベヤベルト92,94は、コンベヤベルト88,90よりも非常に速い速度で進行する。一例として、コンベヤベルト92,94は、コンベヤベルト88,90の2.5倍の速さで進行する。
【0025】
移行領域95を離れると、オブジェクトは、間隔制御領域97に進入し、そこには、2つの間隔制御装置96および98が設けられ、それぞれがオブジェクトの各ライン82,84用とされている。装置96,98は、上述したように、オブジェクトの進行を制限して、それらの相対的な間隔を制御する。特に、装置96,98のフライトは、互いに相対的にずらして配置され、その結果、各ライン82,84のオブジェクトが同様に、互いに相対的にずらして配置されることとなる。オブジェクトが間隔を空けてずらして配置されると、各ライン82,84からのオブジェクトが、オブジェクトを中央に移すガイドレール99の使用により、ライン86内に合流される。
【0026】
図7および8は、搬送されたオブジェクトの間隔を制御するためのシステム100の第2実施形態を示している。このシステム100は、図2および4に示されるシステム10と幾つかの点で類似している。例えば、システム100は、間隔が制御されることとなるオブジェクトOを搬送するコンベヤベルト102と、オブジェクト間隔制御装置32とデザインおよび機能において類似するオブジェクト間隔制御装置104とを備える。すなわち、装置104は、退避状態から伸張状態に移行可能な複数のフライト108を支持する独自のコンベヤベルト106を備える。さらに、装置104は、フライトを伸張するのが望ましくなるまで、退避状態でフライト108を少なくとも維持する退避機構110を備える。しかしながら、このシステム100において、装置104は、水平方向に向けられるとともに、コンベヤベルト102の上方に配置され、それにより、フライト108が下方に延びてオブジェクトOの上端部と相互作用してその進行を制限するようになっている。
【0027】
少なくとも幾つかの実施形態において、フライト108は、重力によって少なくとも部分的に作動される。すなわち、フライト108は、退避機構110を通過すると、自由に下方に反転して、それらがコンベヤベルト106およびコンベヤベルト102の双方と実質的に垂直となる位置に至る。かかる場合、フライト108を開く力は、フライトの質量に比例し、相対的に軽量のフライトの場合、その力が相対的に弱くなる。そのため、オブジェクトOが、未だ完全に伸張していないフライト108の直ぐ下に配置されるとき、フライトは、オブジェクトとの接触を持つ地点を越えて伸張することはなく、オブジェクトに損傷を与えるのに十分な程度の力をオブジェクト上に及ぼすことはない。しかしながら、オブジェクトOがフライト108を通過すると、フライトは自由に降下して伸張状態となる。
【0028】
図7に示すように、重力がフライト108を確実に開くには十分に大きくない場合において、装置104は任意には、フライト作動機構112を含むようにしてもよい。
【特許請求の範囲】
【請求項1】
オブジェクト・コンベヤによって搬送されるオブジェクトの間隔を制御するための装置であって、
退避状態から伸張状態に作動させることができるフライトを備え、当該フライトが、前記伸張状態において、前記オブジェクト・コンベヤを横切って伸張するとともに、当該フライトが前記オブジェクトの進行を制限してそれらオブジェクトの相対的な間隔を制御する構成とされ、
退避したフライトが、本来なら伸張することとなる空間を占有する直ぐ隣のオブジェクトと接触したときに、伸張しないように、相対的に小さな力で前記フライトが作動することを特徴とする装置。
【請求項2】
請求項1に記載の装置において、
前記フライトが取り付けられたコンベヤベルトをさらに備え、
前記フライトが、前記退避状態において、前記コンベヤベルトに対してほぼ平行となり、前記伸張状態において、前記コンベヤベルトに対してほぼ垂直となることを特徴とする装置。
【請求項3】
請求項1または2に記載の装置において、
前記コンベヤベルトが、その外面が鉛直面内に入るように鉛直方向に向けられていることを特徴とする装置。
【請求項4】
請求項3に記載の装置において、
前記コンベヤベルトが、前記オブジェクト・コンベヤの外側縁に隣接する位置に配置されていることを特徴とする装置。
【請求項5】
請求項2乃至4の何れか1項に記載の装置において、
前記フライトが前記オブジェクト・コンベヤと隣接する位置に配置されたときに前記フライトを作動させるように構成された作動機構をさらに備えることを特徴とする装置。
【請求項6】
請求項5に記載の装置において、
前記作動機構が、作動中に前記フライトが接触するプレート部材を備えることを特徴とする装置。
【請求項7】
請求項2乃至6の何れか1項に記載の装置において、
前記フライトを前記退避状態に少なくとも維持する退避機構をさらに備えることを特徴とする装置。
【請求項8】
請求項7に記載の装置において、
前記退避機構が、前記フライトを退避させることも行うことを特徴とする装置。
【請求項9】
請求項8に記載の装置において、
前記退避機構が、前記フライトを前記退避状態に押し込めるレールを備えることを特徴とする装置。
【請求項10】
請求項1または2に記載の装置において、
前記コンベヤベルトが水平方向に向けられるとともに、前記オブジェクト・コンベヤの上方に配置され、作動したときに前記フライトが下方に降下して前記オブジェクトの上端部と相互作用してその進行を制限することを特徴とする装置。
【請求項11】
請求項10に記載の装置において、
前記フライトが少なくとも一部分において重力により作動されることを特徴とする装置。
【請求項12】
請求項1に記載の装置において、
前記フライトが、当該フライトを作動させるのに使用されるカム面と、前記オブジェクトの進行を制限するのに使用される止め部材とを備えることを特徴とする装置。
【請求項13】
請求項12に記載の装置において、
前記カム面が、作動機構の接触面と相互作用する曲面を備え、前記止め部材が、前記オブジェクトと相互作用するほぼ平坦な作動面を備えることを特徴とする装置。
【請求項14】
オブジェクト・コンベヤによって運ばれるオブジェクトの間隔を制御するための装置であって、
複数のフライトを含むベルトであって、前記フライトが、前記ベルトに対してほぼ平行な退避状態から、前記ベルトに対してほぼ垂直な伸張状態に作動させることができるとともに、前記フライトが、前記オブジェクトの進行を制限して、前記オブジェクトコンベヤの長手方向に沿ってそれらオブジェクトの相対的な間隔を制御するように構成されたベルトと、
前記フライトが前記オブジェクト・コンベヤに接近したときに前記フライトを作動させて前記フライトを前記退避状態から前記伸張状態に移行させるように構成された作動機構であって、退避したフライトが、本来なら伸張することとなる空間を占有する直ぐ隣のオブジェクトと接触したときに、伸張しないように、相対的に小さな力で前記フライトを作動させるように構成された作動機構と、
前記フライトが作動されて前記伸張状態に配置されるよう意図されるまで、前記フライトを前記退避状態に維持するように少なくとも構成された退避機構とを備えることを特徴とする装置。
【請求項15】
請求項14に記載の装置において、
前記ベルトが、その外面が鉛直面内に入るように鉛直方向に向けられていることを特徴とする装置。
【請求項16】
請求項14または15に記載の装置において、
前記作動機構が、作動中に前記フライトが接触するプレート部材を備えることを特徴とする装置。
【請求項17】
請求項16に記載の装置において、
少なくとも1の前記フライトが、前記プレート部材の表面と相互作用するカム面を備え、当該カム面と前記プレート部材表面との間の摩擦が、前記フライトを前記伸張状態へと軸周りに回動変換することを特徴とする装置。
【請求項18】
請求項14乃至17の何れか1項に記載の装置において、
前記退避機構が、前記フライトを退避させることも行うように構成されていることを特徴とする装置。
【請求項19】
請求項18に記載の装置において、
前記退避機構が、前記フライトを前記退避状態に押し込めるレールを備えることを特徴とする装置。
【請求項20】
請求項14に記載の装置において、
前記コンベヤベルトが水平方向に向けられるとともに、前記オブジェクト・コンベヤの上方に配置され、作動したときに前記フライトが下方に降下して前記オブジェクトの上端部と相互作用してその進行を制限することを特徴とする装置。
【請求項21】
請求項20に記載の装置において、
前記フライトが少なくとも一部分において重力により作動されることを特徴とする装置。
【請求項22】
第1線速度でオブジェクトを運ぶオブジェクト・コンベヤ上に与えられる前記オブジェクトの間隔を制御するための方法であって、
前記第1線速度よりも遅い第2線速度で、前記オブジェクト・コンベヤに隣接するベルトを作動させるステップを備え、前記ベルトが、前記オブジェクトの進行を制限するように構成された複数のフライトを有し、
前記方法がさらに、
個々のフライトが前記オブジェクト・コンベヤと平行に配置されたときに、それらフライトが前記ベルトに対してほぼ平行となる退避状態から、前記ベルトに対してほぼ垂直となる伸張状態に移行するように、それらフライトを伸張させるステップと、
伸張されたフライトによって、前記オブジェクト・コンベヤにより搬送される個々のオブジェクトの進行を制限するステップと、
退避したフライトが本来なら伸張することとなる空間を占有する直ぐ隣のオブジェクトに接触する、退避したフライトを伸張させないようにするステップと、
前記伸張されたフライトを、オブジェクトの進行の制限に使用された後に、退避させるステップとを備えることを特徴とする方法。
【請求項1】
オブジェクト・コンベヤによって搬送されるオブジェクトの間隔を制御するための装置であって、
退避状態から伸張状態に作動させることができるフライトを備え、当該フライトが、前記伸張状態において、前記オブジェクト・コンベヤを横切って伸張するとともに、当該フライトが前記オブジェクトの進行を制限してそれらオブジェクトの相対的な間隔を制御する構成とされ、
退避したフライトが、本来なら伸張することとなる空間を占有する直ぐ隣のオブジェクトと接触したときに、伸張しないように、相対的に小さな力で前記フライトが作動することを特徴とする装置。
【請求項2】
請求項1に記載の装置において、
前記フライトが取り付けられたコンベヤベルトをさらに備え、
前記フライトが、前記退避状態において、前記コンベヤベルトに対してほぼ平行となり、前記伸張状態において、前記コンベヤベルトに対してほぼ垂直となることを特徴とする装置。
【請求項3】
請求項1または2に記載の装置において、
前記コンベヤベルトが、その外面が鉛直面内に入るように鉛直方向に向けられていることを特徴とする装置。
【請求項4】
請求項3に記載の装置において、
前記コンベヤベルトが、前記オブジェクト・コンベヤの外側縁に隣接する位置に配置されていることを特徴とする装置。
【請求項5】
請求項2乃至4の何れか1項に記載の装置において、
前記フライトが前記オブジェクト・コンベヤと隣接する位置に配置されたときに前記フライトを作動させるように構成された作動機構をさらに備えることを特徴とする装置。
【請求項6】
請求項5に記載の装置において、
前記作動機構が、作動中に前記フライトが接触するプレート部材を備えることを特徴とする装置。
【請求項7】
請求項2乃至6の何れか1項に記載の装置において、
前記フライトを前記退避状態に少なくとも維持する退避機構をさらに備えることを特徴とする装置。
【請求項8】
請求項7に記載の装置において、
前記退避機構が、前記フライトを退避させることも行うことを特徴とする装置。
【請求項9】
請求項8に記載の装置において、
前記退避機構が、前記フライトを前記退避状態に押し込めるレールを備えることを特徴とする装置。
【請求項10】
請求項1または2に記載の装置において、
前記コンベヤベルトが水平方向に向けられるとともに、前記オブジェクト・コンベヤの上方に配置され、作動したときに前記フライトが下方に降下して前記オブジェクトの上端部と相互作用してその進行を制限することを特徴とする装置。
【請求項11】
請求項10に記載の装置において、
前記フライトが少なくとも一部分において重力により作動されることを特徴とする装置。
【請求項12】
請求項1に記載の装置において、
前記フライトが、当該フライトを作動させるのに使用されるカム面と、前記オブジェクトの進行を制限するのに使用される止め部材とを備えることを特徴とする装置。
【請求項13】
請求項12に記載の装置において、
前記カム面が、作動機構の接触面と相互作用する曲面を備え、前記止め部材が、前記オブジェクトと相互作用するほぼ平坦な作動面を備えることを特徴とする装置。
【請求項14】
オブジェクト・コンベヤによって運ばれるオブジェクトの間隔を制御するための装置であって、
複数のフライトを含むベルトであって、前記フライトが、前記ベルトに対してほぼ平行な退避状態から、前記ベルトに対してほぼ垂直な伸張状態に作動させることができるとともに、前記フライトが、前記オブジェクトの進行を制限して、前記オブジェクトコンベヤの長手方向に沿ってそれらオブジェクトの相対的な間隔を制御するように構成されたベルトと、
前記フライトが前記オブジェクト・コンベヤに接近したときに前記フライトを作動させて前記フライトを前記退避状態から前記伸張状態に移行させるように構成された作動機構であって、退避したフライトが、本来なら伸張することとなる空間を占有する直ぐ隣のオブジェクトと接触したときに、伸張しないように、相対的に小さな力で前記フライトを作動させるように構成された作動機構と、
前記フライトが作動されて前記伸張状態に配置されるよう意図されるまで、前記フライトを前記退避状態に維持するように少なくとも構成された退避機構とを備えることを特徴とする装置。
【請求項15】
請求項14に記載の装置において、
前記ベルトが、その外面が鉛直面内に入るように鉛直方向に向けられていることを特徴とする装置。
【請求項16】
請求項14または15に記載の装置において、
前記作動機構が、作動中に前記フライトが接触するプレート部材を備えることを特徴とする装置。
【請求項17】
請求項16に記載の装置において、
少なくとも1の前記フライトが、前記プレート部材の表面と相互作用するカム面を備え、当該カム面と前記プレート部材表面との間の摩擦が、前記フライトを前記伸張状態へと軸周りに回動変換することを特徴とする装置。
【請求項18】
請求項14乃至17の何れか1項に記載の装置において、
前記退避機構が、前記フライトを退避させることも行うように構成されていることを特徴とする装置。
【請求項19】
請求項18に記載の装置において、
前記退避機構が、前記フライトを前記退避状態に押し込めるレールを備えることを特徴とする装置。
【請求項20】
請求項14に記載の装置において、
前記コンベヤベルトが水平方向に向けられるとともに、前記オブジェクト・コンベヤの上方に配置され、作動したときに前記フライトが下方に降下して前記オブジェクトの上端部と相互作用してその進行を制限することを特徴とする装置。
【請求項21】
請求項20に記載の装置において、
前記フライトが少なくとも一部分において重力により作動されることを特徴とする装置。
【請求項22】
第1線速度でオブジェクトを運ぶオブジェクト・コンベヤ上に与えられる前記オブジェクトの間隔を制御するための方法であって、
前記第1線速度よりも遅い第2線速度で、前記オブジェクト・コンベヤに隣接するベルトを作動させるステップを備え、前記ベルトが、前記オブジェクトの進行を制限するように構成された複数のフライトを有し、
前記方法がさらに、
個々のフライトが前記オブジェクト・コンベヤと平行に配置されたときに、それらフライトが前記ベルトに対してほぼ平行となる退避状態から、前記ベルトに対してほぼ垂直となる伸張状態に移行するように、それらフライトを伸張させるステップと、
伸張されたフライトによって、前記オブジェクト・コンベヤにより搬送される個々のオブジェクトの進行を制限するステップと、
退避したフライトが本来なら伸張することとなる空間を占有する直ぐ隣のオブジェクトに接触する、退避したフライトを伸張させないようにするステップと、
前記伸張されたフライトを、オブジェクトの進行の制限に使用された後に、退避させるステップとを備えることを特徴とする方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公表番号】特表2010−527315(P2010−527315A)
【公表日】平成22年8月12日(2010.8.12)
【国際特許分類】
【出願番号】特願2010−508506(P2010−508506)
【出願日】平成20年5月9日(2008.5.9)
【国際出願番号】PCT/US2008/063138
【国際公開番号】WO2008/144245
【国際公開日】平成20年11月27日(2008.11.27)
【出願人】(508181663)レイトラム,エル.エル.シー. (43)
【Fターム(参考)】
【公表日】平成22年8月12日(2010.8.12)
【国際特許分類】
【出願日】平成20年5月9日(2008.5.9)
【国際出願番号】PCT/US2008/063138
【国際公開番号】WO2008/144245
【国際公開日】平成20年11月27日(2008.11.27)
【出願人】(508181663)レイトラム,エル.エル.シー. (43)
【Fターム(参考)】
[ Back to top ]