
被搬送物の移載装置
【課題】 ストッパ等を必要とせず、構造を簡単にすることを可能とする。
【解決手段】 搬入された積層ブロック9をパレット11に乗せ替えて搬出するシート乗替装置1において、パレット11の供給を受ける移載部3と、移載部3の両側に配置され移載部3に対して搬入動作可能な第1,第2コンベアユニット5,7とからなり、第1,第2コンベアユニット5,7を、移載部3の両側から同上側へ各先端部57が相互に近接移動可能となるように可動支持し、搬入された積層ブロック9を近接移動した第1,第2コンベアユニット5,7相互上に位置決めるために搬入動作を停止可能に設け第1,第2コンベアユニット5,7相互を、移載部3上から退避させて積層ブロック9を移載部3上のパレット11に乗せ替えるために離反移動可能に設け、積層ブロック9を乗せたパレット11を搬出可能とすることを特徴とする。
【解決手段】 搬入された積層ブロック9をパレット11に乗せ替えて搬出するシート乗替装置1において、パレット11の供給を受ける移載部3と、移載部3の両側に配置され移載部3に対して搬入動作可能な第1,第2コンベアユニット5,7とからなり、第1,第2コンベアユニット5,7を、移載部3の両側から同上側へ各先端部57が相互に近接移動可能となるように可動支持し、搬入された積層ブロック9を近接移動した第1,第2コンベアユニット5,7相互上に位置決めるために搬入動作を停止可能に設け第1,第2コンベアユニット5,7相互を、移載部3上から退避させて積層ブロック9を移載部3上のパレット11に乗せ替えるために離反移動可能に設け、積層ブロック9を乗せたパレット11を搬出可能とすることを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、段ボールシートの積層ブロックをパレットに乗せ替えて搬送するためなどに供される被搬送物の移載装置に関する。
【背景技術】
【0002】
被搬送物の移載装置は、製紙工場や段ボール工場等において、所定寸法にカットされた紙シート或いは段ボールシートの積層ブロックをパレット等に乗せ替えて搬送する場合に用いられている。この被搬送物の移載装置として、例えば特許第2528251号公報に記載されたようなものがある。
【0003】
従来の被搬送物の移載装置は、パレット待機位置に対し無端チェーンにより循環駆動される薄板と、パレット待機位置の一側に設けられたストッパとを備えている。
【0004】
段ボールシートの積層ブロックは、パレット待機位置の他方側から製品供給ラインにより搬送されて前記薄板上に供給される。積層ブロックは、薄板と共にパレット上へ移行し、ストッパで位置決められる。この状態で、無端チェーンの駆動により薄板が積層ブロックの下から引き抜かれ、積層ブロックがパレット上に移載される。この積層ブロックは、パレットと共に搬出ローラにより搬出される。従って、積層ブロックをパレットに移載して搬送することができる。
【0005】
しかしながら、この従来の移載装置では、ストッパを使用して薄板の引き抜き動作を行わなければ成らず、ストッパや薄板の供給構造が複雑になるという問題があった。
【0006】
【特許文献1】特許第2528251号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
解決しようとする問題点は、ストッパや薄板の供給構造が複雑になる点である。
【課題を解決するための手段】
【0008】
本発明は、構造を簡単にするため、前記第1,第2ユニットを、前記移載部の両側から同上側へ各先端部が相互に近接移動可能となるように可動支持し、前記搬入された被搬送物を前記近接移動した第1,第2ユニット相互上に位置決めるために前記搬入動作を停止可能に設け、前記第1,第2ユニット相互を、前記移載部上から退避させて前記位置決められた被搬送物を移載部上の可動載置体に乗せ替えるために離反移動可能に設け、前記被搬送物を乗せた可動載置体を搬出可能とすることを最も主要な特徴とする。
【発明の効果】
【0009】
本発明の被搬送物の移載装置は、第1,第2ユニットと移載部との協働により被搬送物を可動載置体に乗せ替えるため、従来のようなストッパや薄板を必要とせず、その分構造を簡素化することができる。
【0010】
前記第1,第2ユニットの一方を前記被搬送物の搬入手段として構成すると共に同他方を被搬送物を乗せた可動載置体の搬出手段として構成し、前記移載部は、昇降動作可能に構成されると共に前記可動載置体を載置したとき搬送方向前後両側に該可動載置体が突き出る大きさに形成され、前記第1,第2ユニットを、前記移載部が下降状態にあるとき該移載部の上側で相互に近接移動可能に設け、前記第1,第2ユニットを、前記搬入された被搬送物を近接移動した第1,第2ユニット相互上に位置決めるために動作停止可能に設け、前記第1,第2ユニット相互を、前記移載部上から退避させて前記位置決められた被搬送物を移載部上の可動載置体に乗せ替えるために離反移動可能に設け、前記第1,第2ユニットを、前記被搬送物を乗せた可動載置体を前記移載部により上昇動作させたとき前記移載部の搬送方向前後両側に突き出た可動載置体の下部に臨ませるために移動可能に設け、前記第1,第2ユニットを、前記被搬送物を乗せた可動載置体を前記移載部により下降動作させたとき被搬送物を乗せた可動載置体を第1,第2ユニット相互上に位置決めるために前記移載部の上側でさらに接近移動可能に設け、前記第1,第2ユニットの何れかの搬出手段としての動作により前記被搬送物を乗せた可動載置体を搬出可能とする場合は、搬入された被搬送物の搬入方向と同一方向へ、被搬送物を乗せた可動載置体を搬出することができる。
【0011】
前記移載部が、前記搬入方向に交差する方向から前記可動載置体の供給動作を可能とする載置体搬入部及び前記第1,第2ユニットに対して前記昇降動作が可能であると共に前記載置体搬入部よりも下位へ下降動作可能な昇降テーブルを備えた場合は、載置体搬入部により移載部に搬入された可動載置体を昇降テーブルの上昇動作により上昇させることに基づいて被搬送物を可動載置体へ乗せ替える動作を可能とし、ストッパや薄板を必要とせず、確実に乗せ替えることができる。
【0012】
前記昇降テーブルの上昇位置が、前記第1,第2ユニットとほぼ一致する高さ位置である場合は、被搬送物を乗せた可動載置部を昇降テーブルにより上昇動作させ且つ前記第1,第2ユニットを接近移動させ前記移載部の搬送方向前後両側に突き出た可動載置体の下部に前記第1,第2ユニットを確実に臨ませ、薄板の引き抜きを必要とせずに確実に乗せ替えることができる。
【0013】
前記移載部が、前記搬入方向に交差する方向から前記可動載置体の供給動作及び被搬送物を乗せ替えた可動載置体の搬出動作を可能とする載置体搬入部を備え、前記移載部の側部位置に、前記被搬送物を乗せた可動載置体を前記被搬送物の搬入方向に交差する方向へ搬出可能とする第3ユニットを設けた場合は、搬入された被搬送物の搬入方向と交差する方向へ被搬送物を乗せた可動載置体を搬出することができる。
【0014】
前記第1,第2ユニットが、相互に離反移動するとき逆方向へ搬送動作可能に設けられた場合は、ストッパ及び薄板の引き抜きを必要とせずに確実に乗せ替えることができる。
【0015】
前記前記第1,第2ユニットが、無端体の走行回転により前記搬送動作を行う場合は、重量のある被搬送物であっても無理なく搬送して移載部へ供給すると共に、移載部から無理なく搬出することができる。
【0016】
前記第1,第2ユニットが、前記移載部の上側で相互に接近移動する先端部が、本体部に対して上下に薄く形成されている場合は、前記第1,第2ユニットが、相互に離反移動して被搬送物を可動載置体へ乗せ替えるとき、第1,第2ユニットと可動載置体との間の段差を少なくすることができ、乗せ替え時に被搬送物の荷崩れを抑制することができる。
【0017】
前記第1,第2ユニットは、該第1,第2ユニットから可動載置体への被搬送物の乗せ替えガイドを行う傾斜ガイドを先端部に備えた場合は、第1,第2ユニットから可動載置体への被搬送物の乗せ替え時に、傾斜ガイドの乗せ替えガイドにより徐々に乗せ替えを行わせることができ、乗せ替え時に被搬送物の荷崩れを抑制することができる。
【0018】
前記載置体搬入部を動作させる載置体搬入アクチュエータ及び前記昇降テーブルを動作させる昇降アクチュエータを設け、前記第1,第2ユニットを搬送動作させる搬送アクチュエータ及び第1,第2ユニットを接近離反移動させる接離アクチュエータを設け、前記載置体搬入アクチュエータ及び昇降アクチュエータと搬送アクチュエータ及び接離アクチュエータとを制御する移載制御手段を設けた場合は、移載制御手段による制御で移載部への可動載置体の搬入、被搬送物の搬入、被搬送物の可動載置体への乗せ替え、被搬送物を乗せた可動載置体の被搬送物搬入方向と同方向への搬出動作を自動化することができる。
【0019】
前記載置体搬入部を動作させる載置体搬入アクチュエータを設け、前記第1,第2ユニットを搬送動作させる搬送アクチュエータ及び第1,第2ユニットを接近離反移動させる接離アクチュエータを設け、前記第3ユニットを動作させる搬出アクチュエータを設け、前記載置体搬入アクチュエータ、前記搬送アクチュエータ及び接離アクチュエータ、前記搬出アクチュエータを制御する移載制御手段を設けた場合は、移載制御手段による制御で移載部への可動載置体の搬入、被搬送物の搬入、被搬送物の可動載置体への乗せ替え、被搬送物を乗せた可動載置体の被搬送物搬入方向と交差する方向への搬出動作を自動化することができる。
【発明を実施するための最良の形態】
【0020】
第1,第2ユニットと移載部との協働により被搬送物を可動載置体に乗せ替えるという目的を、簡単な構造で実現した。
【実施例1】
【0021】
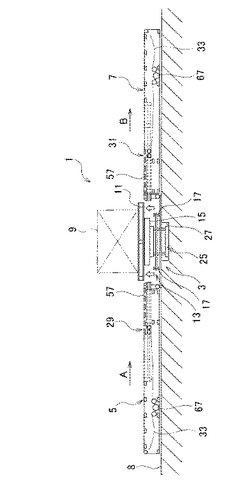
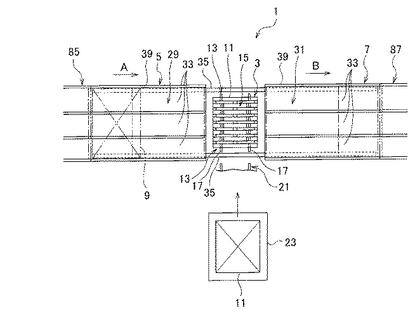
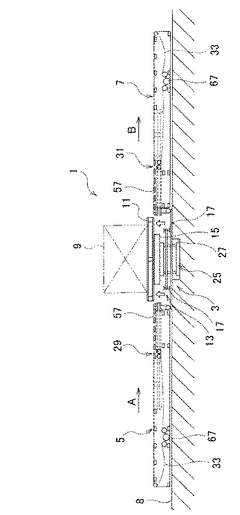
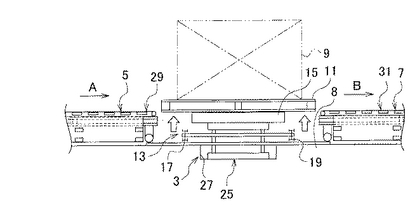
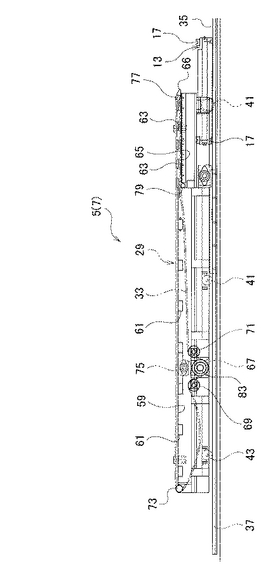
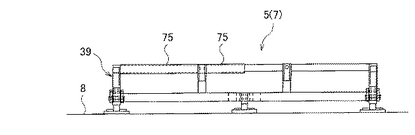
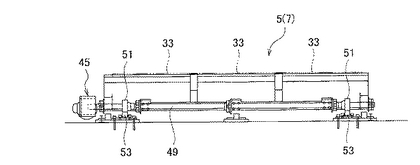
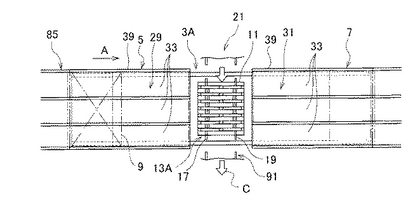
図1,図2は、本発明の実施例1に係り、図1は被搬送物の移載装置として、シート乗替装置1の平面図、図2は同側面図を示している。図1,図2のように、シート乗替装置1は、移載部3と、第1,第2ユニットとしての第1,第2コンベアユニット5,7とからなっている。前記移載部3及び第1,第2コンベアユニット5,7は、工場内のベースフロア8上に設置されている。このシート乗替装置1は、搬送された被搬送物、例えば段ボールシートの積層ブロック9を可動載置体、例えばパレット11に乗せ替えて搬送するものである。
【0022】
前記移載部3は、前記パレット11の供給を受けるもので、昇降動作可能に構成されると共に、前記パレット11を載置したとき図1,図2の矢印A,Bで示す搬送方向の前後両側に、該パレット11が突き出る大きさに形成されている。
【0023】
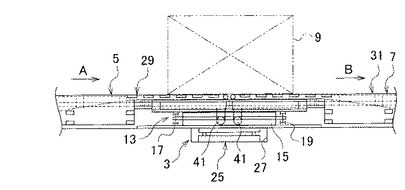
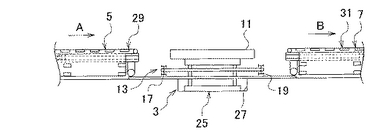
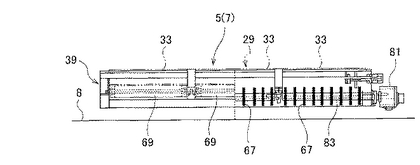
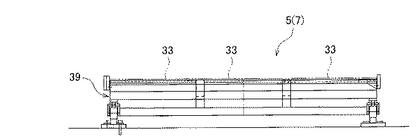
図3,図4,図5は、前記移載部3を拡大して示し、図3は第1,第2コンベアユニット5,7の近接状態での要部側面図、図4は同離反状態での要部側面図、図5は積層ブロック搬出後の要部側面図である。これら図3〜図5をも参照して説明すると、図1〜図5のように、前記移載部3は、載置体搬入部13及び昇降テーブル15を備えている。
【0024】
前記載置体搬入部13は、一対の無端チェーン17,19を備えている。無端チェーン17,19は、前記積層ブロック9の搬入方向(矢印A方向)に交差する方向へ走行駆動されるようになっている。無端チェーン17,19の駆動は、載置体搬入部13を動作させる載置体搬入アクチュエータである載置体搬入モータ(図示せず)によって行われるようになっている。
【0025】
前記積層ブロック9の搬入方向に対し移載部3の側方には、無端チェーンで構成された載置体搬送部21が設けられ、載置体搬送部21の端部に、パレット供給部23が備えられている。従って、パレット供給部23から載置体搬送部21、載置体搬入部13を介し移載部3へのパレット11の供給動作を可能とする。この供給動作は、前記積層ブロック9の搬入方向である矢印A方向に交差する方向となっている。
【0026】
前記昇降テーブル15は、前記第1,第2コンベアユニット5,7に対して昇降動作が可能であると共に、前記載置対搬入部13の無端チェーン17,19よりも下位へ下降動作可能となっている。昇降テーブル15は、昇降アクチュエータである昇降シリンダ装置25上に支持されている。昇降シリンダ装置25は、ベースフロア8に設けられた凹部27内に設置されている。昇降シリンダ装置25は、例えば油圧が作動流体として用いられている。昇降テーブル15の上昇位置は、前記第1,第2コンベアユニット5の後述する搬送作用部とほぼ一致する高さ位置となっている。
【0027】
前記第1,第2コンベアユニット5,7は、前記移載部3の両側に配置され、少なくとも一方に積載ブロック9の搬入動作が可能な搬送作用部29が設けられている。本実施例では、第2コンベアユニット7にも搬送作用部31を設けている。すなわち、第1コンベアユニット5を積載ブロック9の搬入手段として構成し、第2コンベアユニット7を積載ブロック9を乗せたパレット11の搬出手段として構成している。
【0028】
前記第1,第2コンベアユニット5は、本実施例においてほぼ同一構造に形成されている。従って、第1コンベアユニット5について説明し、第2コンベアユニット7については対応する構成部分に同符号を付し、適宜引用し、その詳細な説明は省略する。
【0029】
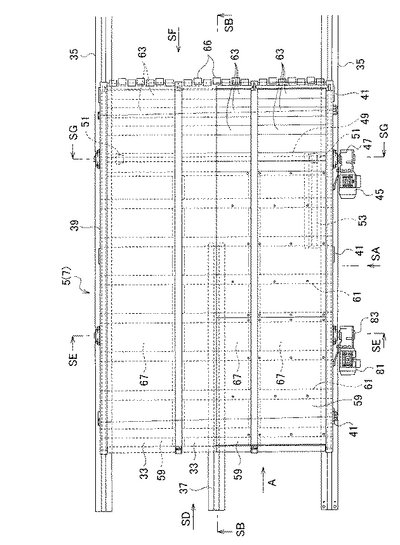
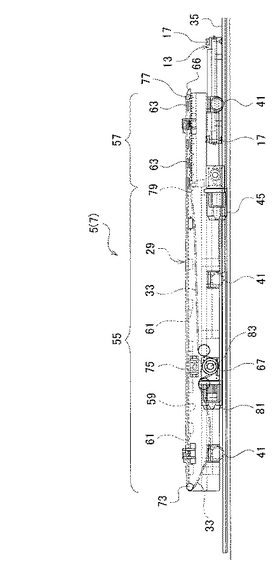
図6は、第1コンベアユニット5の一部を省略した平面図、図7は図6のSA矢視の側面図、図8は図6のSB−SB矢視断面図、図9は図6のSD矢視の側面図、図10は図6のSE−SE矢視断面図、図11は図6のSF矢視の側面図、図12は図6のSG−SG矢視断面図である。これら図6〜図12をも用いて第1コンベアユニット5をさらに説明する。
【0030】
図1〜図12のように、第1コンベアユニット5は、無単体としてのベルト33が用いられ、ベルト33の搬送作用部29での走行回転により前記搬送動作を行うたものである。各ベルト33は、例えばプラスチック等で形成された複数のコマをチェーン状に連結して無端体状に形成したものである。但し、ベルト33の構成は任意である。
【0031】
前記第1コンベアユニット5は、レール35,37上を走行可能となっている。両側の一対のレール35は、第1,第2コンベアユニット5,7間に渡って連続して長く形成され、レール35間に配置されたレール37はレール35の中央において搬送方向端部側に短く備えられている。
【0032】
前記第1コンベアユニット5の本体は、前記レール35,37上を走行移動可能なフレーム39で構成されている。フレーム39には、幅方向両側に前記レール35上を転動する車輪41がそれぞれ3個設けられている。第1コンベアユニット5の幅方向中央端部側には、前記レール37上を転動する車輪43が設けられている。
【0033】
前記レール35,37に対するフレーム39の走行は、接離アクチュエータとしての接離モータ45で行われるようになっている。接離モータ45は、前記フレーム39の側面に取り付けられている。接離モータ45には、連動部47を介して駆動軸49が連動連結されている。駆動軸49は、前記フレーム39に回転可能に支持されている。駆動軸49には、一対のピニオン51が設けられている。ピニオン51は、ラック53に噛み合っている。ラック53は、レール35に沿った方向に配置され、ベースフロア8側に固定されている。従って、接離モータ45の駆動により駆動軸49が回転駆動されると、ピニオン51がラック53に対して回転し、該ピニオン51がラック53に沿って移動する。このピニオン51の回転移動に伴って、フレーム39がレール35,37に対する車輪41,43の転動を介し、搬入方向前後へ移動することができる。第2コンベアユニット7は、搬出方向(矢印B方向)前後へ移動することができる。
【0034】
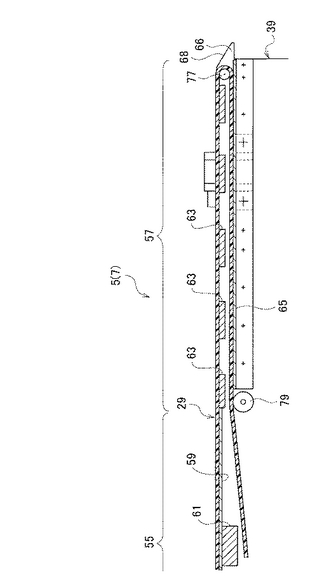
前記フレーム39は、第1コンベアユニット5の本体部55と先端部57とで構成されている。
【0035】
前記本体部55には、3本のベルト33に対応してそれぞれ支持パネル59が設けられている。支持パネル59の下面には、前記フレーム39に所定間隔で設けられた補強部材61が設けられている。支持パネル59は、補強部材61に固定されている。前記フレーム39の先端部57側には、各ベルト33に対応した位置でそれぞれに所定間隔で補強部材63が設けられている。
【0036】
前記先端部57は、移載部3の両側から上側へ相互に近接移動する部分となっている。図13は、前記先端部59側の拡大断面図を示している。図13をも参照すると、先端部57側には、前記補強部材63の下面側に、各ベルト33に対応して下部パネル65が設けられている。この構成により、前記第1コンベアユニット5は、先端部57が、本体部55に対して上下に薄く形成されている。
【0037】
前記先端部57には、フレーム39側に取り付けられた傾斜ガイド66が設けられたいる。傾斜ガイド66は、例えば樹脂で形成され、先端部57においてベルト33の搬送作用部29の面からベルト33の下面に渡って傾斜するガイド面68を備えている。
【0038】
前記フレーム39には、各ベルト33に対応して、駆動スプロケット67、遊動ローラ69,71,73,75,77,79が設けられている。
【0039】
前記第1コンベアユニット5の各ベルト33は、駆動スプロケット67、遊動ローラ69,71,73,75,77,79に掛け回されている。フレーム39の上部においては、各ベルト33が各支持パネル59、補強部材63上を走行回転するようになっている。第1コンベアユニット5の先端部57では、補強部材63の下側で、ベルト33が下部パネル65上で走行支持されるようになっている。従って、各ベルト33によって、フレーム39の上部に前記搬送作用部29が構成されている。
【0040】
前記駆動スプロケット67の駆動は、搬送アクチュエータである搬送モータ81で行う。搬送モータ81は、前記フレーム39に取り付けられ、搬送駆動軸83に連動連結されている。搬送駆動軸83は、前記フレーム39の幅方向に延設され、前記各駆動スプロケット67を所定間隔で取り付けている。
【0041】
前記搬送モータ81の駆動により搬送駆動軸83を回転駆動すると、各駆動スプロケット67を介して、各ベルト33が走行回転駆動される。このベルト33の走行回転駆動により、ベルト33が搬送作用部29において、例えば搬入方向(矢印A方向)に走行回転する。
【0042】
前記載置体搬入モータ、昇降シリンダ装置25、搬送モータ81、接離モータ45は、移載制御手段である移載コントローラによって制御される構成となっている。移載コントローラは、各種の位置検出センサ等からの信号を受けて制御するようになっている。
【0043】
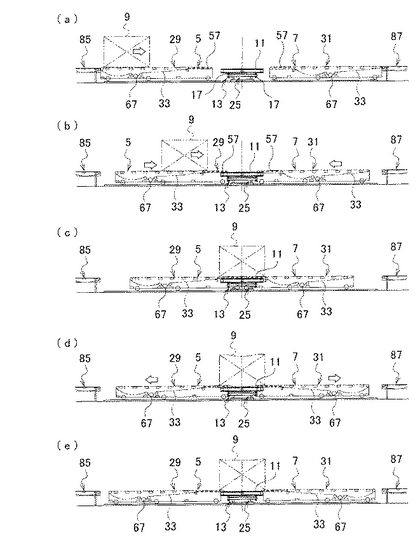
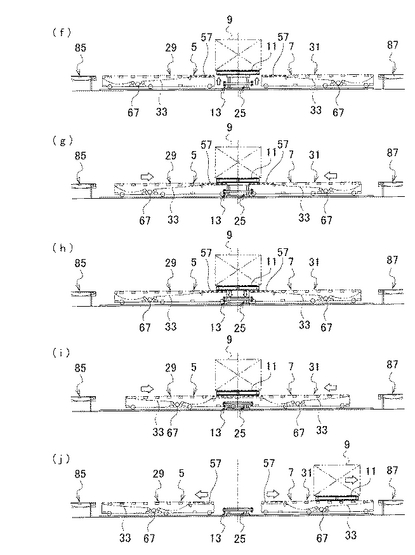
図14,図15は、作用説明図である。図14(a)〜(e)、図15(f)〜(j)は動作を経時的に示したものであり、図14(a)〜(e)は積層ブロックの搬入を示す第1段階から第5段階の説明図、図15(f)〜(j)は積層ブロックの乗せ替えと搬出を示す第6段階〜第10段階の説明図である。
【0044】
まず、パレット供給部23から載置体搬送部21、載置体搬入部13の駆動によって移載部3上にパレット11が搬入され、移載部3において昇降テーブル15の上側にパレット11が配置される(図14(a))。
【0045】
次に、図14(a)のように、上流側のコンベアユニット85から積層ブロック9を第1コンベアユニット5に引き継ぐ。このとき、第1コンベアユニット5はコンベアユニット85側に近接し、第2コンベアユニット7は搬出側のコンベアユニット87に近接している。
【0046】
この状態で、第1コンベアユニット5の搬送モータ81が駆動制御され、駆動スプロケット67を介して各ベルト33が走行回転する。このベルト33の走行回転により積層ブロック9がコンベアユニット85から第1コンベアユニット5上へ搬入される。
【0047】
前記第1コンベアユニット5の各ベルト33の搬入方向への駆動を継続しながら、第2コンベアユニット5,7の接離モータ45が駆動され、第1,第2コンベアユニット5,7が前記のようにしてレール35,37上を走行する。第1,第2コンベアユニット5,7は、移載部3の上側で相互に近接移動する(図14(b)、(c))。第1,第2コンベアユニット5,7が移載部3上で近接移動するとき、移載部3に対し先端部57側の薄い部分が移載部3上に移動する。このとき移載部3の昇降テーブル15は下降位置にあり、載置体搬入部13の無端チェーン17,19よりも下降している。
【0048】
図14(c)のように、第1,第2コンベアユニット5,7が近接移動すると、移載コントローラにより、第1,第2コンベアユニット5,7の接離モータ45、搬送モータ81が停止制御され、積層ブロック9の搬入動作が停止制御されて、積層ブロック9が第1,第2コンベアユニット5,7相互上に位置決められる。
【0049】
次いで、第1,第2コンベアユニット5,7の接離モータ45が逆転駆動され、図14(d)のように第1,第2コンベアユニット5,7が離反移動し、積載部3上から退避する。このとき第1,第2コンベアユニット5,7の各搬送モータ81は、相互に逆方向に駆動され、搬送作用部29,31においてベルト33が逆方向へ走行駆動される。
【0050】
前記第1,第2コンベアユニット5,7が移載部3上から退避するとき、前記ベルト33の逆転走行回転により積層ブロック9はそのままの位置を保持する。従って、第1,第2コンベアユニット5,7の移載部3上からの退避により図14(e)のように積層ブロック9がパレット11上に乗せ替えられる。
【0051】
前記第1,第2コンベアユニット5,7は、先端部57が、本体部55に対して上下に薄く形成されているため、第1,第2コンベアユニット5,7が、相互に離反移動して積載ブロック9をパレット11へ乗せ替えるとき、第1,第2コンベアユニット5,7とパレット11との間の段差を少なくすることができ、乗せ替え時に積載ブロック9の荷崩れを抑制することができる。
【0052】
また、前記第1,第2コンベアユニット5,7からパレット11への積載ブロック9の乗せ替え時に、傾斜ガイド66のガイド面68による乗せ替えガイドにより徐々に乗せ替えを行わせることができ、乗せ替え時に積載ブロック9の荷崩れを抑制することができる。特に、第1,第2コンベアユニット5,7の先端部57が積載ブロック9に完全に同期して作用すれば良いが、作用状況が第1,第2コンベアユニット5,7相互間で相違することもある。このような状況でも、両傾斜ガイドの乗せ替えガイドにより積載ブロック9の確実な乗せ替えを行わせることができる。積層ブロック9の搬送方向の幅がより狭いものであっても、荷崩れを確実に抑制することができる。
【0053】
次に、移載コントローラにより、昇降シリンダ装置25が制御され、図15(f)のように、昇降テーブル15を上昇させる。昇降テーブル15はその上面が第1,第2コンベアユニット5,7の搬送作用部29,31上面とほぼ一致する高さまで上昇する。
【0054】
次に、第1,第2コンベアユニット5,7の接離モータ45が逆転制御され、第1,第2コンベアユニット5,7の先端部57が再び近接する方向へ移動し、先端部57が移載部3の搬送方向前後両側に突き出たパレット11の下部に臨む。この位置で、接離モータ45が停止制御され、且つ昇降シリンダ装置25の駆動によって、昇降テーブル15が下降する(図15(f))。
【0055】
次いで、接離モータ45の駆動により、第1,第2コンベアユニット5,7が図15(i)のように近接移動し、積層ブロック9を乗せたパレット11が第1,第2コンベアユニット5,7相互上に位置決められる。
【0056】
次いで、第1,第2コンベアユニット5,7の搬送モータ81の駆動により、積層ブロック9を乗せたパレット11を第2コンベアユニット7の搬送作用部31上へ移動させる。
【0057】
次いで、接離モータ45が再び逆転駆動制御され、第1,第2コンベアユニット5,7が図15(j)のように離反移動する。
【0058】
前記第2コンベアユニット7が搬出側のコンベアユニット87に近接すると、積層ブロック9を乗せたパレット11は、コンベアユニット87に引き継がれ搬出が行われる。
【0059】
このように、第1,第2コンベアユニット5,7と移載部3との協働により積層ブロック9をパレット11に乗せ替えるため、従来のようなストッパや薄板を必要とせず、その分構造を簡素化することができる。
【実施例2】
【0060】
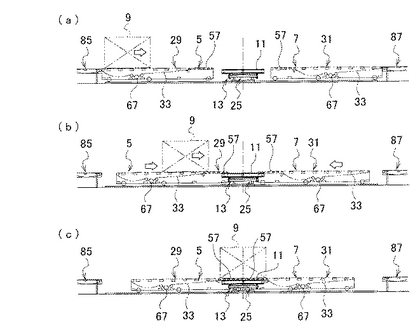
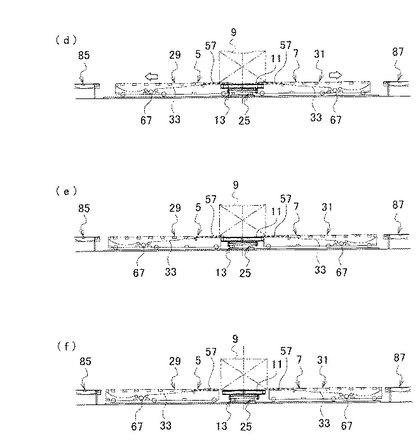
図16〜図18は、本発明の実施例2を示し、図16は平面図、図17,図18は作用を説明する側面図であり、図17(a)〜(c)は積層ブロックの搬入を示す第1段階から第3段階の説明図、図18(d)〜(e)は、積層ブロックの乗せ替えを示す第4段階から第6段階の説明図である。尚、基本的な構成は、実施例1と同一であり、対応する構成部分には同符号を付して説明する。
【0061】
本実施例では、実施例1が積層ブロック9を搬入方向に沿った方向へ直線的に搬出するのに対し、本実施例では積層ブロック9を搬入方向に対し直交する方向へ搬出する例を示した。
【0062】
本実施例の移載部3Aには、その側部位置に第3ユニットとして第3コンベアユニット91が設けられている。第3コンベアユニット91は、例えば左右の無端体チェーンで構成され、積層ブロック9を乗せたパレット11を積層ブロック9の搬入方向である矢印A方向に対し交差する方向である直交方向(矢印C方向)へ搬出可能としている。
【0063】
そして、上記実施例と同様に、積層ブロック9が図17(a),(b),(c)のように搬入されて、第1,第2コンベアユニット5,7相互上に位置決められ、図18(d),(e),(f)のように第1,第2コンベアユニット5が離反移動して、積層ブロック9が移載部3A上のパレット11に乗せ替えられる。
【0064】
次いで、移載コントローラにより載置体搬入部13Aの無端チェーン17,19が前記と同方向に走行駆動制御され、積層ブロック9を乗せたパレット11が第3コンベアユニット91側へ移動する。第3コンベアユニット91の走行駆動によって積層ブロック9を乗せたパレット11が搬出される。
【0065】
従って、本実施例では、積層ブロック9をパレット11に乗せ替えた後、積層ブロック9の搬入方向(矢印A方向)に対し直交方向(矢印C方向)へ搬出することができる。
【0066】
尚、上記実施例では、第2コンベアユニット7を第1コンベアユニット5と同一構造に形成したが、第2コンベアユニット7をレールによって上記のように移動可能な単なる支持板あるいはローラコンベア等で第2ユニットとして構成することもできる。ローラコンベアで構成する場合には、ローラが単に遊動する構造のものを用いることができる。この場合、第1,第2コンベアユニット5,7が離反移動するとき、第1コンベアユニット5側の走行回転を適宜制御することによって、上記同様な乗せ替え作業を得ることができる。
【0067】
前記先端部57で第1,第2コンベアユニット5,7を薄く形成したが、高さ方向に余裕がある場合には、本体部55などと同様に厚く形成することも可能である。
【0068】
第1,第2コンベアユニット5,7は、モータによって駆動されるローラによって構成したコンベアユニットとすることも可能である。載置体搬入部13,13A、載置体搬送作用部21、第3コンベアユニット91は、ローラコンベア、ベルトコンベア等によって構成することも可能である。
【図面の簡単な説明】
【0069】
【図1】シート乗替装置の平面図である(実施例1)。
【図2】シート乗替装置の側面図である(実施例1)。
【図3】第1,第2コンベアユニットの近接状態での要部側面図である(実施例1)。
【図4】第1,第2コンベアユニットの離反状態での要部側面図である(実施例1)。
【図5】積層ブロック搬出後の第1,第2コンベアユニットの要部側面図である(実施例1)。
【図6】第1コンベアユニットの一部を省略した平面図である(実施例1)。
【図7】図6のSA矢視の側面図である(実施例1)。
【図8】図6のSB−SB矢視断面図である(実施例1)。
【図9】図6のSD矢視の側面図である(実施例1)。
【図10】図6のSE−SE矢視断面図である(実施例1)。
【図11】図6のSF矢視の側面図である(実施例1)。
【図12】図6のSG−SG矢視断面図である(実施例1)。
【図13】第1コンベアユニットの先端部側の拡大断面図である(実施例1)。
【図14】積層ブロックの搬入を示すシート乗替装置の第1段階(a)から第5段階(e)の説明図である(実施例1)。
【図15】積層ブロックの乗せ替えと搬出を示すシート乗替装置の第6段階(f)〜第10段階(j)の説明図である(実施例1)。
【図16】シート乗替装置の平面図である(実施例2)。
【図17】積層ブロックの搬入を示す第1段階(a)から第3段階(c)の説明図である(実施例2)。
【図18】積層ブロックの乗せ替えを示す第4段階(d)から第6段階(f)の説明図である(実施例2)。
【符号の説明】
【0070】
1 シート乗替装置(被搬送物の移載装置)
3,3A 移載部
5 第1コンベアユニット(第1ユニット)
7 第2コンベアユニット(第2ユニット)
9 積層ブロック(被搬送物)
11 パレット(可動載置体)
13,13A 載置体搬入部
15 昇降テーブル
17,19 無端チェーン
25 昇降シリンダ装置(昇降アクチュエータ)
29,31 搬送作用部
45 接離モータ(接離アクチュエータ)
81 搬送モータ(搬送アクチュエータ)
91 第3コンベアユニット(第3ユニット)
【技術分野】
【0001】
本発明は、段ボールシートの積層ブロックをパレットに乗せ替えて搬送するためなどに供される被搬送物の移載装置に関する。
【背景技術】
【0002】
被搬送物の移載装置は、製紙工場や段ボール工場等において、所定寸法にカットされた紙シート或いは段ボールシートの積層ブロックをパレット等に乗せ替えて搬送する場合に用いられている。この被搬送物の移載装置として、例えば特許第2528251号公報に記載されたようなものがある。
【0003】
従来の被搬送物の移載装置は、パレット待機位置に対し無端チェーンにより循環駆動される薄板と、パレット待機位置の一側に設けられたストッパとを備えている。
【0004】
段ボールシートの積層ブロックは、パレット待機位置の他方側から製品供給ラインにより搬送されて前記薄板上に供給される。積層ブロックは、薄板と共にパレット上へ移行し、ストッパで位置決められる。この状態で、無端チェーンの駆動により薄板が積層ブロックの下から引き抜かれ、積層ブロックがパレット上に移載される。この積層ブロックは、パレットと共に搬出ローラにより搬出される。従って、積層ブロックをパレットに移載して搬送することができる。
【0005】
しかしながら、この従来の移載装置では、ストッパを使用して薄板の引き抜き動作を行わなければ成らず、ストッパや薄板の供給構造が複雑になるという問題があった。
【0006】
【特許文献1】特許第2528251号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
解決しようとする問題点は、ストッパや薄板の供給構造が複雑になる点である。
【課題を解決するための手段】
【0008】
本発明は、構造を簡単にするため、前記第1,第2ユニットを、前記移載部の両側から同上側へ各先端部が相互に近接移動可能となるように可動支持し、前記搬入された被搬送物を前記近接移動した第1,第2ユニット相互上に位置決めるために前記搬入動作を停止可能に設け、前記第1,第2ユニット相互を、前記移載部上から退避させて前記位置決められた被搬送物を移載部上の可動載置体に乗せ替えるために離反移動可能に設け、前記被搬送物を乗せた可動載置体を搬出可能とすることを最も主要な特徴とする。
【発明の効果】
【0009】
本発明の被搬送物の移載装置は、第1,第2ユニットと移載部との協働により被搬送物を可動載置体に乗せ替えるため、従来のようなストッパや薄板を必要とせず、その分構造を簡素化することができる。
【0010】
前記第1,第2ユニットの一方を前記被搬送物の搬入手段として構成すると共に同他方を被搬送物を乗せた可動載置体の搬出手段として構成し、前記移載部は、昇降動作可能に構成されると共に前記可動載置体を載置したとき搬送方向前後両側に該可動載置体が突き出る大きさに形成され、前記第1,第2ユニットを、前記移載部が下降状態にあるとき該移載部の上側で相互に近接移動可能に設け、前記第1,第2ユニットを、前記搬入された被搬送物を近接移動した第1,第2ユニット相互上に位置決めるために動作停止可能に設け、前記第1,第2ユニット相互を、前記移載部上から退避させて前記位置決められた被搬送物を移載部上の可動載置体に乗せ替えるために離反移動可能に設け、前記第1,第2ユニットを、前記被搬送物を乗せた可動載置体を前記移載部により上昇動作させたとき前記移載部の搬送方向前後両側に突き出た可動載置体の下部に臨ませるために移動可能に設け、前記第1,第2ユニットを、前記被搬送物を乗せた可動載置体を前記移載部により下降動作させたとき被搬送物を乗せた可動載置体を第1,第2ユニット相互上に位置決めるために前記移載部の上側でさらに接近移動可能に設け、前記第1,第2ユニットの何れかの搬出手段としての動作により前記被搬送物を乗せた可動載置体を搬出可能とする場合は、搬入された被搬送物の搬入方向と同一方向へ、被搬送物を乗せた可動載置体を搬出することができる。
【0011】
前記移載部が、前記搬入方向に交差する方向から前記可動載置体の供給動作を可能とする載置体搬入部及び前記第1,第2ユニットに対して前記昇降動作が可能であると共に前記載置体搬入部よりも下位へ下降動作可能な昇降テーブルを備えた場合は、載置体搬入部により移載部に搬入された可動載置体を昇降テーブルの上昇動作により上昇させることに基づいて被搬送物を可動載置体へ乗せ替える動作を可能とし、ストッパや薄板を必要とせず、確実に乗せ替えることができる。
【0012】
前記昇降テーブルの上昇位置が、前記第1,第2ユニットとほぼ一致する高さ位置である場合は、被搬送物を乗せた可動載置部を昇降テーブルにより上昇動作させ且つ前記第1,第2ユニットを接近移動させ前記移載部の搬送方向前後両側に突き出た可動載置体の下部に前記第1,第2ユニットを確実に臨ませ、薄板の引き抜きを必要とせずに確実に乗せ替えることができる。
【0013】
前記移載部が、前記搬入方向に交差する方向から前記可動載置体の供給動作及び被搬送物を乗せ替えた可動載置体の搬出動作を可能とする載置体搬入部を備え、前記移載部の側部位置に、前記被搬送物を乗せた可動載置体を前記被搬送物の搬入方向に交差する方向へ搬出可能とする第3ユニットを設けた場合は、搬入された被搬送物の搬入方向と交差する方向へ被搬送物を乗せた可動載置体を搬出することができる。
【0014】
前記第1,第2ユニットが、相互に離反移動するとき逆方向へ搬送動作可能に設けられた場合は、ストッパ及び薄板の引き抜きを必要とせずに確実に乗せ替えることができる。
【0015】
前記前記第1,第2ユニットが、無端体の走行回転により前記搬送動作を行う場合は、重量のある被搬送物であっても無理なく搬送して移載部へ供給すると共に、移載部から無理なく搬出することができる。
【0016】
前記第1,第2ユニットが、前記移載部の上側で相互に接近移動する先端部が、本体部に対して上下に薄く形成されている場合は、前記第1,第2ユニットが、相互に離反移動して被搬送物を可動載置体へ乗せ替えるとき、第1,第2ユニットと可動載置体との間の段差を少なくすることができ、乗せ替え時に被搬送物の荷崩れを抑制することができる。
【0017】
前記第1,第2ユニットは、該第1,第2ユニットから可動載置体への被搬送物の乗せ替えガイドを行う傾斜ガイドを先端部に備えた場合は、第1,第2ユニットから可動載置体への被搬送物の乗せ替え時に、傾斜ガイドの乗せ替えガイドにより徐々に乗せ替えを行わせることができ、乗せ替え時に被搬送物の荷崩れを抑制することができる。
【0018】
前記載置体搬入部を動作させる載置体搬入アクチュエータ及び前記昇降テーブルを動作させる昇降アクチュエータを設け、前記第1,第2ユニットを搬送動作させる搬送アクチュエータ及び第1,第2ユニットを接近離反移動させる接離アクチュエータを設け、前記載置体搬入アクチュエータ及び昇降アクチュエータと搬送アクチュエータ及び接離アクチュエータとを制御する移載制御手段を設けた場合は、移載制御手段による制御で移載部への可動載置体の搬入、被搬送物の搬入、被搬送物の可動載置体への乗せ替え、被搬送物を乗せた可動載置体の被搬送物搬入方向と同方向への搬出動作を自動化することができる。
【0019】
前記載置体搬入部を動作させる載置体搬入アクチュエータを設け、前記第1,第2ユニットを搬送動作させる搬送アクチュエータ及び第1,第2ユニットを接近離反移動させる接離アクチュエータを設け、前記第3ユニットを動作させる搬出アクチュエータを設け、前記載置体搬入アクチュエータ、前記搬送アクチュエータ及び接離アクチュエータ、前記搬出アクチュエータを制御する移載制御手段を設けた場合は、移載制御手段による制御で移載部への可動載置体の搬入、被搬送物の搬入、被搬送物の可動載置体への乗せ替え、被搬送物を乗せた可動載置体の被搬送物搬入方向と交差する方向への搬出動作を自動化することができる。
【発明を実施するための最良の形態】
【0020】
第1,第2ユニットと移載部との協働により被搬送物を可動載置体に乗せ替えるという目的を、簡単な構造で実現した。
【実施例1】
【0021】
図1,図2は、本発明の実施例1に係り、図1は被搬送物の移載装置として、シート乗替装置1の平面図、図2は同側面図を示している。図1,図2のように、シート乗替装置1は、移載部3と、第1,第2ユニットとしての第1,第2コンベアユニット5,7とからなっている。前記移載部3及び第1,第2コンベアユニット5,7は、工場内のベースフロア8上に設置されている。このシート乗替装置1は、搬送された被搬送物、例えば段ボールシートの積層ブロック9を可動載置体、例えばパレット11に乗せ替えて搬送するものである。
【0022】
前記移載部3は、前記パレット11の供給を受けるもので、昇降動作可能に構成されると共に、前記パレット11を載置したとき図1,図2の矢印A,Bで示す搬送方向の前後両側に、該パレット11が突き出る大きさに形成されている。
【0023】
図3,図4,図5は、前記移載部3を拡大して示し、図3は第1,第2コンベアユニット5,7の近接状態での要部側面図、図4は同離反状態での要部側面図、図5は積層ブロック搬出後の要部側面図である。これら図3〜図5をも参照して説明すると、図1〜図5のように、前記移載部3は、載置体搬入部13及び昇降テーブル15を備えている。
【0024】
前記載置体搬入部13は、一対の無端チェーン17,19を備えている。無端チェーン17,19は、前記積層ブロック9の搬入方向(矢印A方向)に交差する方向へ走行駆動されるようになっている。無端チェーン17,19の駆動は、載置体搬入部13を動作させる載置体搬入アクチュエータである載置体搬入モータ(図示せず)によって行われるようになっている。
【0025】
前記積層ブロック9の搬入方向に対し移載部3の側方には、無端チェーンで構成された載置体搬送部21が設けられ、載置体搬送部21の端部に、パレット供給部23が備えられている。従って、パレット供給部23から載置体搬送部21、載置体搬入部13を介し移載部3へのパレット11の供給動作を可能とする。この供給動作は、前記積層ブロック9の搬入方向である矢印A方向に交差する方向となっている。
【0026】
前記昇降テーブル15は、前記第1,第2コンベアユニット5,7に対して昇降動作が可能であると共に、前記載置対搬入部13の無端チェーン17,19よりも下位へ下降動作可能となっている。昇降テーブル15は、昇降アクチュエータである昇降シリンダ装置25上に支持されている。昇降シリンダ装置25は、ベースフロア8に設けられた凹部27内に設置されている。昇降シリンダ装置25は、例えば油圧が作動流体として用いられている。昇降テーブル15の上昇位置は、前記第1,第2コンベアユニット5の後述する搬送作用部とほぼ一致する高さ位置となっている。
【0027】
前記第1,第2コンベアユニット5,7は、前記移載部3の両側に配置され、少なくとも一方に積載ブロック9の搬入動作が可能な搬送作用部29が設けられている。本実施例では、第2コンベアユニット7にも搬送作用部31を設けている。すなわち、第1コンベアユニット5を積載ブロック9の搬入手段として構成し、第2コンベアユニット7を積載ブロック9を乗せたパレット11の搬出手段として構成している。
【0028】
前記第1,第2コンベアユニット5は、本実施例においてほぼ同一構造に形成されている。従って、第1コンベアユニット5について説明し、第2コンベアユニット7については対応する構成部分に同符号を付し、適宜引用し、その詳細な説明は省略する。
【0029】
図6は、第1コンベアユニット5の一部を省略した平面図、図7は図6のSA矢視の側面図、図8は図6のSB−SB矢視断面図、図9は図6のSD矢視の側面図、図10は図6のSE−SE矢視断面図、図11は図6のSF矢視の側面図、図12は図6のSG−SG矢視断面図である。これら図6〜図12をも用いて第1コンベアユニット5をさらに説明する。
【0030】
図1〜図12のように、第1コンベアユニット5は、無単体としてのベルト33が用いられ、ベルト33の搬送作用部29での走行回転により前記搬送動作を行うたものである。各ベルト33は、例えばプラスチック等で形成された複数のコマをチェーン状に連結して無端体状に形成したものである。但し、ベルト33の構成は任意である。
【0031】
前記第1コンベアユニット5は、レール35,37上を走行可能となっている。両側の一対のレール35は、第1,第2コンベアユニット5,7間に渡って連続して長く形成され、レール35間に配置されたレール37はレール35の中央において搬送方向端部側に短く備えられている。
【0032】
前記第1コンベアユニット5の本体は、前記レール35,37上を走行移動可能なフレーム39で構成されている。フレーム39には、幅方向両側に前記レール35上を転動する車輪41がそれぞれ3個設けられている。第1コンベアユニット5の幅方向中央端部側には、前記レール37上を転動する車輪43が設けられている。
【0033】
前記レール35,37に対するフレーム39の走行は、接離アクチュエータとしての接離モータ45で行われるようになっている。接離モータ45は、前記フレーム39の側面に取り付けられている。接離モータ45には、連動部47を介して駆動軸49が連動連結されている。駆動軸49は、前記フレーム39に回転可能に支持されている。駆動軸49には、一対のピニオン51が設けられている。ピニオン51は、ラック53に噛み合っている。ラック53は、レール35に沿った方向に配置され、ベースフロア8側に固定されている。従って、接離モータ45の駆動により駆動軸49が回転駆動されると、ピニオン51がラック53に対して回転し、該ピニオン51がラック53に沿って移動する。このピニオン51の回転移動に伴って、フレーム39がレール35,37に対する車輪41,43の転動を介し、搬入方向前後へ移動することができる。第2コンベアユニット7は、搬出方向(矢印B方向)前後へ移動することができる。
【0034】
前記フレーム39は、第1コンベアユニット5の本体部55と先端部57とで構成されている。
【0035】
前記本体部55には、3本のベルト33に対応してそれぞれ支持パネル59が設けられている。支持パネル59の下面には、前記フレーム39に所定間隔で設けられた補強部材61が設けられている。支持パネル59は、補強部材61に固定されている。前記フレーム39の先端部57側には、各ベルト33に対応した位置でそれぞれに所定間隔で補強部材63が設けられている。
【0036】
前記先端部57は、移載部3の両側から上側へ相互に近接移動する部分となっている。図13は、前記先端部59側の拡大断面図を示している。図13をも参照すると、先端部57側には、前記補強部材63の下面側に、各ベルト33に対応して下部パネル65が設けられている。この構成により、前記第1コンベアユニット5は、先端部57が、本体部55に対して上下に薄く形成されている。
【0037】
前記先端部57には、フレーム39側に取り付けられた傾斜ガイド66が設けられたいる。傾斜ガイド66は、例えば樹脂で形成され、先端部57においてベルト33の搬送作用部29の面からベルト33の下面に渡って傾斜するガイド面68を備えている。
【0038】
前記フレーム39には、各ベルト33に対応して、駆動スプロケット67、遊動ローラ69,71,73,75,77,79が設けられている。
【0039】
前記第1コンベアユニット5の各ベルト33は、駆動スプロケット67、遊動ローラ69,71,73,75,77,79に掛け回されている。フレーム39の上部においては、各ベルト33が各支持パネル59、補強部材63上を走行回転するようになっている。第1コンベアユニット5の先端部57では、補強部材63の下側で、ベルト33が下部パネル65上で走行支持されるようになっている。従って、各ベルト33によって、フレーム39の上部に前記搬送作用部29が構成されている。
【0040】
前記駆動スプロケット67の駆動は、搬送アクチュエータである搬送モータ81で行う。搬送モータ81は、前記フレーム39に取り付けられ、搬送駆動軸83に連動連結されている。搬送駆動軸83は、前記フレーム39の幅方向に延設され、前記各駆動スプロケット67を所定間隔で取り付けている。
【0041】
前記搬送モータ81の駆動により搬送駆動軸83を回転駆動すると、各駆動スプロケット67を介して、各ベルト33が走行回転駆動される。このベルト33の走行回転駆動により、ベルト33が搬送作用部29において、例えば搬入方向(矢印A方向)に走行回転する。
【0042】
前記載置体搬入モータ、昇降シリンダ装置25、搬送モータ81、接離モータ45は、移載制御手段である移載コントローラによって制御される構成となっている。移載コントローラは、各種の位置検出センサ等からの信号を受けて制御するようになっている。
【0043】
図14,図15は、作用説明図である。図14(a)〜(e)、図15(f)〜(j)は動作を経時的に示したものであり、図14(a)〜(e)は積層ブロックの搬入を示す第1段階から第5段階の説明図、図15(f)〜(j)は積層ブロックの乗せ替えと搬出を示す第6段階〜第10段階の説明図である。
【0044】
まず、パレット供給部23から載置体搬送部21、載置体搬入部13の駆動によって移載部3上にパレット11が搬入され、移載部3において昇降テーブル15の上側にパレット11が配置される(図14(a))。
【0045】
次に、図14(a)のように、上流側のコンベアユニット85から積層ブロック9を第1コンベアユニット5に引き継ぐ。このとき、第1コンベアユニット5はコンベアユニット85側に近接し、第2コンベアユニット7は搬出側のコンベアユニット87に近接している。
【0046】
この状態で、第1コンベアユニット5の搬送モータ81が駆動制御され、駆動スプロケット67を介して各ベルト33が走行回転する。このベルト33の走行回転により積層ブロック9がコンベアユニット85から第1コンベアユニット5上へ搬入される。
【0047】
前記第1コンベアユニット5の各ベルト33の搬入方向への駆動を継続しながら、第2コンベアユニット5,7の接離モータ45が駆動され、第1,第2コンベアユニット5,7が前記のようにしてレール35,37上を走行する。第1,第2コンベアユニット5,7は、移載部3の上側で相互に近接移動する(図14(b)、(c))。第1,第2コンベアユニット5,7が移載部3上で近接移動するとき、移載部3に対し先端部57側の薄い部分が移載部3上に移動する。このとき移載部3の昇降テーブル15は下降位置にあり、載置体搬入部13の無端チェーン17,19よりも下降している。
【0048】
図14(c)のように、第1,第2コンベアユニット5,7が近接移動すると、移載コントローラにより、第1,第2コンベアユニット5,7の接離モータ45、搬送モータ81が停止制御され、積層ブロック9の搬入動作が停止制御されて、積層ブロック9が第1,第2コンベアユニット5,7相互上に位置決められる。
【0049】
次いで、第1,第2コンベアユニット5,7の接離モータ45が逆転駆動され、図14(d)のように第1,第2コンベアユニット5,7が離反移動し、積載部3上から退避する。このとき第1,第2コンベアユニット5,7の各搬送モータ81は、相互に逆方向に駆動され、搬送作用部29,31においてベルト33が逆方向へ走行駆動される。
【0050】
前記第1,第2コンベアユニット5,7が移載部3上から退避するとき、前記ベルト33の逆転走行回転により積層ブロック9はそのままの位置を保持する。従って、第1,第2コンベアユニット5,7の移載部3上からの退避により図14(e)のように積層ブロック9がパレット11上に乗せ替えられる。
【0051】
前記第1,第2コンベアユニット5,7は、先端部57が、本体部55に対して上下に薄く形成されているため、第1,第2コンベアユニット5,7が、相互に離反移動して積載ブロック9をパレット11へ乗せ替えるとき、第1,第2コンベアユニット5,7とパレット11との間の段差を少なくすることができ、乗せ替え時に積載ブロック9の荷崩れを抑制することができる。
【0052】
また、前記第1,第2コンベアユニット5,7からパレット11への積載ブロック9の乗せ替え時に、傾斜ガイド66のガイド面68による乗せ替えガイドにより徐々に乗せ替えを行わせることができ、乗せ替え時に積載ブロック9の荷崩れを抑制することができる。特に、第1,第2コンベアユニット5,7の先端部57が積載ブロック9に完全に同期して作用すれば良いが、作用状況が第1,第2コンベアユニット5,7相互間で相違することもある。このような状況でも、両傾斜ガイドの乗せ替えガイドにより積載ブロック9の確実な乗せ替えを行わせることができる。積層ブロック9の搬送方向の幅がより狭いものであっても、荷崩れを確実に抑制することができる。
【0053】
次に、移載コントローラにより、昇降シリンダ装置25が制御され、図15(f)のように、昇降テーブル15を上昇させる。昇降テーブル15はその上面が第1,第2コンベアユニット5,7の搬送作用部29,31上面とほぼ一致する高さまで上昇する。
【0054】
次に、第1,第2コンベアユニット5,7の接離モータ45が逆転制御され、第1,第2コンベアユニット5,7の先端部57が再び近接する方向へ移動し、先端部57が移載部3の搬送方向前後両側に突き出たパレット11の下部に臨む。この位置で、接離モータ45が停止制御され、且つ昇降シリンダ装置25の駆動によって、昇降テーブル15が下降する(図15(f))。
【0055】
次いで、接離モータ45の駆動により、第1,第2コンベアユニット5,7が図15(i)のように近接移動し、積層ブロック9を乗せたパレット11が第1,第2コンベアユニット5,7相互上に位置決められる。
【0056】
次いで、第1,第2コンベアユニット5,7の搬送モータ81の駆動により、積層ブロック9を乗せたパレット11を第2コンベアユニット7の搬送作用部31上へ移動させる。
【0057】
次いで、接離モータ45が再び逆転駆動制御され、第1,第2コンベアユニット5,7が図15(j)のように離反移動する。
【0058】
前記第2コンベアユニット7が搬出側のコンベアユニット87に近接すると、積層ブロック9を乗せたパレット11は、コンベアユニット87に引き継がれ搬出が行われる。
【0059】
このように、第1,第2コンベアユニット5,7と移載部3との協働により積層ブロック9をパレット11に乗せ替えるため、従来のようなストッパや薄板を必要とせず、その分構造を簡素化することができる。
【実施例2】
【0060】
図16〜図18は、本発明の実施例2を示し、図16は平面図、図17,図18は作用を説明する側面図であり、図17(a)〜(c)は積層ブロックの搬入を示す第1段階から第3段階の説明図、図18(d)〜(e)は、積層ブロックの乗せ替えを示す第4段階から第6段階の説明図である。尚、基本的な構成は、実施例1と同一であり、対応する構成部分には同符号を付して説明する。
【0061】
本実施例では、実施例1が積層ブロック9を搬入方向に沿った方向へ直線的に搬出するのに対し、本実施例では積層ブロック9を搬入方向に対し直交する方向へ搬出する例を示した。
【0062】
本実施例の移載部3Aには、その側部位置に第3ユニットとして第3コンベアユニット91が設けられている。第3コンベアユニット91は、例えば左右の無端体チェーンで構成され、積層ブロック9を乗せたパレット11を積層ブロック9の搬入方向である矢印A方向に対し交差する方向である直交方向(矢印C方向)へ搬出可能としている。
【0063】
そして、上記実施例と同様に、積層ブロック9が図17(a),(b),(c)のように搬入されて、第1,第2コンベアユニット5,7相互上に位置決められ、図18(d),(e),(f)のように第1,第2コンベアユニット5が離反移動して、積層ブロック9が移載部3A上のパレット11に乗せ替えられる。
【0064】
次いで、移載コントローラにより載置体搬入部13Aの無端チェーン17,19が前記と同方向に走行駆動制御され、積層ブロック9を乗せたパレット11が第3コンベアユニット91側へ移動する。第3コンベアユニット91の走行駆動によって積層ブロック9を乗せたパレット11が搬出される。
【0065】
従って、本実施例では、積層ブロック9をパレット11に乗せ替えた後、積層ブロック9の搬入方向(矢印A方向)に対し直交方向(矢印C方向)へ搬出することができる。
【0066】
尚、上記実施例では、第2コンベアユニット7を第1コンベアユニット5と同一構造に形成したが、第2コンベアユニット7をレールによって上記のように移動可能な単なる支持板あるいはローラコンベア等で第2ユニットとして構成することもできる。ローラコンベアで構成する場合には、ローラが単に遊動する構造のものを用いることができる。この場合、第1,第2コンベアユニット5,7が離反移動するとき、第1コンベアユニット5側の走行回転を適宜制御することによって、上記同様な乗せ替え作業を得ることができる。
【0067】
前記先端部57で第1,第2コンベアユニット5,7を薄く形成したが、高さ方向に余裕がある場合には、本体部55などと同様に厚く形成することも可能である。
【0068】
第1,第2コンベアユニット5,7は、モータによって駆動されるローラによって構成したコンベアユニットとすることも可能である。載置体搬入部13,13A、載置体搬送作用部21、第3コンベアユニット91は、ローラコンベア、ベルトコンベア等によって構成することも可能である。
【図面の簡単な説明】
【0069】
【図1】シート乗替装置の平面図である(実施例1)。
【図2】シート乗替装置の側面図である(実施例1)。
【図3】第1,第2コンベアユニットの近接状態での要部側面図である(実施例1)。
【図4】第1,第2コンベアユニットの離反状態での要部側面図である(実施例1)。
【図5】積層ブロック搬出後の第1,第2コンベアユニットの要部側面図である(実施例1)。
【図6】第1コンベアユニットの一部を省略した平面図である(実施例1)。
【図7】図6のSA矢視の側面図である(実施例1)。
【図8】図6のSB−SB矢視断面図である(実施例1)。
【図9】図6のSD矢視の側面図である(実施例1)。
【図10】図6のSE−SE矢視断面図である(実施例1)。
【図11】図6のSF矢視の側面図である(実施例1)。
【図12】図6のSG−SG矢視断面図である(実施例1)。
【図13】第1コンベアユニットの先端部側の拡大断面図である(実施例1)。
【図14】積層ブロックの搬入を示すシート乗替装置の第1段階(a)から第5段階(e)の説明図である(実施例1)。
【図15】積層ブロックの乗せ替えと搬出を示すシート乗替装置の第6段階(f)〜第10段階(j)の説明図である(実施例1)。
【図16】シート乗替装置の平面図である(実施例2)。
【図17】積層ブロックの搬入を示す第1段階(a)から第3段階(c)の説明図である(実施例2)。
【図18】積層ブロックの乗せ替えを示す第4段階(d)から第6段階(f)の説明図である(実施例2)。
【符号の説明】
【0070】
1 シート乗替装置(被搬送物の移載装置)
3,3A 移載部
5 第1コンベアユニット(第1ユニット)
7 第2コンベアユニット(第2ユニット)
9 積層ブロック(被搬送物)
11 パレット(可動載置体)
13,13A 載置体搬入部
15 昇降テーブル
17,19 無端チェーン
25 昇降シリンダ装置(昇降アクチュエータ)
29,31 搬送作用部
45 接離モータ(接離アクチュエータ)
81 搬送モータ(搬送アクチュエータ)
91 第3コンベアユニット(第3ユニット)
【特許請求の範囲】
【請求項1】
搬入された被搬送物を可動載置体に乗せ替えて搬出する被搬送物の移載装置において、
前記可動載置体の供給を受ける移載部と、
前記移載部の両側に配置され該移載部に対して少なくとも一方が搬入動作可能な第1,第2ユニットとからなり、
前記第1,第2ユニットを、前記移載部の両側から同上側へ各先端部が相互に近接移動可能となるように可動支持し、
前記搬入された被搬送物を前記近接移動した第1,第2ユニット相互上に位置決めるために前記搬入動作を停止可能に設け、
前記第1,第2ユニット相互を、前記移載部上から退避させて前記位置決められた被搬送物を移載部上の可動載置体に乗せ替えるために離反移動可能に設け、
前記被搬送物を乗せた可動載置体を搬出可能とすることを特徴とする被搬送物の移載装置。
【請求項2】
請求項1記載の被搬送物の移載装置であって、
前記第1,第2ユニットの一方を前記被搬送物の搬入手段として構成すると共に同他方を被搬送物を乗せた可動載置体の搬出手段として構成し、
前記移載部は、昇降動作可能に構成されると共に前記可動載置体を載置したとき搬送方向前後両側に該可動載置体が突き出る大きさに形成され、
前記第1,第2ユニットを、前記移載部が下降状態にあるとき該移載部の上側で相互に近接移動可能に設け、
前記第1,第2ユニットを、前記搬入された被搬送物を近接移動した第1,第2ユニット相互上に位置決めるために動作停止可能に設け、
前記第1,第2ユニット相互を、前記移載部上から退避させて前記位置決められた被搬送物を移載部上の可動載置体に乗せ替えるために離反移動可能に設け、
前記第1,第2ユニットを、前記被搬送物を乗せた可動載置体を前記移載部により上昇動作させたとき前記移載部の搬送方向前後両側に突き出た可動載置体の下部に臨ませるために移動可能に設け、
前記第1,第2ユニットを、前記被搬送物を乗せた可動載置体を前記移載部により下降動作させたとき被搬送物を乗せた可動載置体を第1,第2ユニット相互上に位置決めるために前記移載部の上側でさらに接近移動可能に設け、
前記第1,第2ユニットの何れかの搬出手段としての動作により前記被搬送物を乗せた可動載置体を搬出可能とすることを特徴とする被搬送物の移載装置。
【請求項3】
請求項2記載の被搬送物の移載装置であって、
前記移載部は、前記搬入方向に交差する方向から前記可動載置体の供給動作を可能とする載置体搬入部及び前記第1,第2ユニットに対して前記昇降動作が可能であると共に前記載置体搬入部よりも下位へ下降動作可能な昇降テーブルを備えたことを特徴とする被搬送物の移載装置。
【請求項4】
請求項3記載の被搬送物の移載装置であって、
前記昇降テーブルの上昇位置は、前記第1,第2ユニットとほぼ一致する高さ位置であることを特徴とする被搬送物の移載装置。
【請求項5】
請求項1記載の被搬送物の移載装置であって、
前記移載部は、前記搬入方向に交差する方向から前記可動載置体の供給動作及び被搬送物を乗せ替えた可動載置体の搬出動作を可能とする載置体搬入部を備え、
前記移載部の側部位置に、前記被搬送物を乗せた可動載置体を前記被搬送物の搬入方向に交差する方向へ搬出可能とする第3ユニットを設けたことを特徴とする被搬送物の移載装置。
【請求項6】
請求項1〜5の何れかに記載の被搬送物の移載装置であって、
前記第1,第2ユニットは、相互に離反移動するとき逆方向へ搬送動作可能に設けたことを特徴とする被搬送物の移載装置。
【請求項7】
請求項1〜6の何れかに記載の被搬送物の移載装置であって、
前記前記第1,第2ユニットは、無端体の走行回転により前記搬送動作を行うことを特徴とする被搬送物の移載装置。
【請求項8】
請求項1〜7の何れかに記載の被搬送物の移載装置であって、
前記第1,第2ユニットは、前記移載部の上側で相互に接近移動する先端部が、本体部に対して上下に薄く形成されていることを特徴とする被搬送物の移載装置。
【請求項9】
請求項1〜8の何れかに記載の被搬送物の移載装置であって、
前記第1,第2ユニットは、該第1,第2ユニットから可動載置体への被搬送物の乗せ替えガイドを行う傾斜ガイドを先端部に備えたことを特徴とする被搬送物の移載装置。
【請求項10】
請求項2〜4の何れかに記載の被搬送物の移載装置にであって、
前記載置体搬入部を動作させる載置体搬入アクチュエータ及び前記昇降テーブルを動作させる昇降アクチュエータを設け、
前記第1,第2ユニットを搬送動作させる搬送アクチュエータ及び第1,第2ユニットを接近離反移動させる接離アクチュエータを設け、
前記載置体搬入アクチュエータ及び昇降アクチュエータと搬送アクチュエータ及び接離アクチュエータとを制御する移載制御手段を設けたことを特徴とする被搬送物の移載装置。
【請求項11】
請求項5記載の被搬送物の移載装置にであって、
前記載置体搬入部を動作させる載置体搬入アクチュエータを設け、
前記第1,第2ユニットを搬送動作させる搬送アクチュエータ及び第1,第2ユニットを接近離反移動させる接離アクチュエータを設け、
前記第3ユニットを動作させる搬出アクチュエータを設け、
前記載置体搬入アクチュエータ、前記搬送アクチュエータ及び接離アクチュエータ、前記搬出アクチュエータを制御する移載制御手段を設けたことを特徴とする被搬送物の移載装置。
【請求項1】
搬入された被搬送物を可動載置体に乗せ替えて搬出する被搬送物の移載装置において、
前記可動載置体の供給を受ける移載部と、
前記移載部の両側に配置され該移載部に対して少なくとも一方が搬入動作可能な第1,第2ユニットとからなり、
前記第1,第2ユニットを、前記移載部の両側から同上側へ各先端部が相互に近接移動可能となるように可動支持し、
前記搬入された被搬送物を前記近接移動した第1,第2ユニット相互上に位置決めるために前記搬入動作を停止可能に設け、
前記第1,第2ユニット相互を、前記移載部上から退避させて前記位置決められた被搬送物を移載部上の可動載置体に乗せ替えるために離反移動可能に設け、
前記被搬送物を乗せた可動載置体を搬出可能とすることを特徴とする被搬送物の移載装置。
【請求項2】
請求項1記載の被搬送物の移載装置であって、
前記第1,第2ユニットの一方を前記被搬送物の搬入手段として構成すると共に同他方を被搬送物を乗せた可動載置体の搬出手段として構成し、
前記移載部は、昇降動作可能に構成されると共に前記可動載置体を載置したとき搬送方向前後両側に該可動載置体が突き出る大きさに形成され、
前記第1,第2ユニットを、前記移載部が下降状態にあるとき該移載部の上側で相互に近接移動可能に設け、
前記第1,第2ユニットを、前記搬入された被搬送物を近接移動した第1,第2ユニット相互上に位置決めるために動作停止可能に設け、
前記第1,第2ユニット相互を、前記移載部上から退避させて前記位置決められた被搬送物を移載部上の可動載置体に乗せ替えるために離反移動可能に設け、
前記第1,第2ユニットを、前記被搬送物を乗せた可動載置体を前記移載部により上昇動作させたとき前記移載部の搬送方向前後両側に突き出た可動載置体の下部に臨ませるために移動可能に設け、
前記第1,第2ユニットを、前記被搬送物を乗せた可動載置体を前記移載部により下降動作させたとき被搬送物を乗せた可動載置体を第1,第2ユニット相互上に位置決めるために前記移載部の上側でさらに接近移動可能に設け、
前記第1,第2ユニットの何れかの搬出手段としての動作により前記被搬送物を乗せた可動載置体を搬出可能とすることを特徴とする被搬送物の移載装置。
【請求項3】
請求項2記載の被搬送物の移載装置であって、
前記移載部は、前記搬入方向に交差する方向から前記可動載置体の供給動作を可能とする載置体搬入部及び前記第1,第2ユニットに対して前記昇降動作が可能であると共に前記載置体搬入部よりも下位へ下降動作可能な昇降テーブルを備えたことを特徴とする被搬送物の移載装置。
【請求項4】
請求項3記載の被搬送物の移載装置であって、
前記昇降テーブルの上昇位置は、前記第1,第2ユニットとほぼ一致する高さ位置であることを特徴とする被搬送物の移載装置。
【請求項5】
請求項1記載の被搬送物の移載装置であって、
前記移載部は、前記搬入方向に交差する方向から前記可動載置体の供給動作及び被搬送物を乗せ替えた可動載置体の搬出動作を可能とする載置体搬入部を備え、
前記移載部の側部位置に、前記被搬送物を乗せた可動載置体を前記被搬送物の搬入方向に交差する方向へ搬出可能とする第3ユニットを設けたことを特徴とする被搬送物の移載装置。
【請求項6】
請求項1〜5の何れかに記載の被搬送物の移載装置であって、
前記第1,第2ユニットは、相互に離反移動するとき逆方向へ搬送動作可能に設けたことを特徴とする被搬送物の移載装置。
【請求項7】
請求項1〜6の何れかに記載の被搬送物の移載装置であって、
前記前記第1,第2ユニットは、無端体の走行回転により前記搬送動作を行うことを特徴とする被搬送物の移載装置。
【請求項8】
請求項1〜7の何れかに記載の被搬送物の移載装置であって、
前記第1,第2ユニットは、前記移載部の上側で相互に接近移動する先端部が、本体部に対して上下に薄く形成されていることを特徴とする被搬送物の移載装置。
【請求項9】
請求項1〜8の何れかに記載の被搬送物の移載装置であって、
前記第1,第2ユニットは、該第1,第2ユニットから可動載置体への被搬送物の乗せ替えガイドを行う傾斜ガイドを先端部に備えたことを特徴とする被搬送物の移載装置。
【請求項10】
請求項2〜4の何れかに記載の被搬送物の移載装置にであって、
前記載置体搬入部を動作させる載置体搬入アクチュエータ及び前記昇降テーブルを動作させる昇降アクチュエータを設け、
前記第1,第2ユニットを搬送動作させる搬送アクチュエータ及び第1,第2ユニットを接近離反移動させる接離アクチュエータを設け、
前記載置体搬入アクチュエータ及び昇降アクチュエータと搬送アクチュエータ及び接離アクチュエータとを制御する移載制御手段を設けたことを特徴とする被搬送物の移載装置。
【請求項11】
請求項5記載の被搬送物の移載装置にであって、
前記載置体搬入部を動作させる載置体搬入アクチュエータを設け、
前記第1,第2ユニットを搬送動作させる搬送アクチュエータ及び第1,第2ユニットを接近離反移動させる接離アクチュエータを設け、
前記第3ユニットを動作させる搬出アクチュエータを設け、
前記載置体搬入アクチュエータ、前記搬送アクチュエータ及び接離アクチュエータ、前記搬出アクチュエータを制御する移載制御手段を設けたことを特徴とする被搬送物の移載装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公開番号】特開2006−1723(P2006−1723A)
【公開日】平成18年1月5日(2006.1.5)
【国際特許分類】
【出願番号】特願2004−182150(P2004−182150)
【出願日】平成16年6月21日(2004.6.21)
【出願人】(592247595)株式会社神戸製作所 (19)
【Fターム(参考)】
【公開日】平成18年1月5日(2006.1.5)
【国際特許分類】
【出願日】平成16年6月21日(2004.6.21)
【出願人】(592247595)株式会社神戸製作所 (19)
【Fターム(参考)】
[ Back to top ]