
被検体内挿入装置
【課題】螺旋構造部の螺旋形状を適正に維持して安定した推進力が得られるようにした被検体内挿入装置を実現する。
【解決手段】被検体内挿入装置としてのカプセル型医療装置誘導システムは、被検体内に挿入する挿入部本体としてのカプセル型医療装置3と、このカプセル型医療装置3を回転させる回転機構としてのマグネットと、このマグネットによるカプセル型医療装置3の回転運動を推進力に変換する、カプセル型医療装置3の外表面42aに対して径方向に分離して設けた螺旋構造部44と、カプセル型医療装置3の外表面42aに対して径方向に分離して設けた螺旋構造部44の螺旋外径を変化させる螺旋外径変化手段としてのモータ30とを具備して構成されている。
【解決手段】被検体内挿入装置としてのカプセル型医療装置誘導システムは、被検体内に挿入する挿入部本体としてのカプセル型医療装置3と、このカプセル型医療装置3を回転させる回転機構としてのマグネットと、このマグネットによるカプセル型医療装置3の回転運動を推進力に変換する、カプセル型医療装置3の外表面42aに対して径方向に分離して設けた螺旋構造部44と、カプセル型医療装置3の外表面42aに対して径方向に分離して設けた螺旋構造部44の螺旋外径を変化させる螺旋外径変化手段としてのモータ30とを具備して構成されている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、体腔内に挿入して回転しながら推進する被検体内挿入装置に関する。
【背景技術】
【0002】
体腔内に挿入して回転しながら推進する被検体内挿入装置の従来例としては、例えば特公昭60−56488号公報に記載されている。この特公昭60−56488号公報には、内視鏡先端部に設けた回動部材の外表面に螺旋構造部として膨張・収縮自在な膜部材を形成した体腔内誘導装置が記載されている。この体腔内誘導装置は、前記回転部材の回転中心に対して斜走する向きに前記膜部材が巻回され、前記回転部材を回転することにより前記膜部材が管腔内壁との間でねじ作用により推進力を得て前記内視鏡先端部を推進させる。
【特許文献1】特公昭60−56488号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、前記体腔内誘導装置は、前記膜部材の膨張圧が高くなると、隣り合う螺旋の間隔が狭くなり、螺旋と螺旋との間に腸壁などの管腔内壁が入り込み難くなる。このため、前記体腔内誘導装置は、前記膜部材と管腔内壁との接触状態が悪くなり、前記ねじ作用による推進力が著しく低下してしまう。一方、前記体腔内誘導装置は、前記膜部材の膨張圧が低くなると螺旋形状を維持することが困難となり、前記ねじ作用による推進力が得られ難くなる。
【0004】
本発明は上述した点に鑑みてなされたもので、螺旋構造部の螺旋形状を適正に維持して安定した推進力が得られるようにした被検体内挿入装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
上記課題を解決するために本発明の一態様による被検体内挿入装置は、被検体内に挿入する挿入部本体と、前記挿入部本体を回転させる回転機構と、前記回転機構による前記挿入部本体の回転運動を推進力に変換する、前記挿入部本体の外表面に対して径方向に分離して設けた螺旋構造部と、前記挿入部本体の外表面に対して径方向に分離して設けた前記螺旋構造部の螺旋外径を変化させる螺旋外径変化手段と、を具備している。
【発明の効果】
【0006】
本発明の被検体内挿入装置は、螺旋構造部の螺旋形状を適正に維持して安定した推進力を得ることができるという効果がある。
【発明を実施するための最良の形態】
【0007】
以下、図面を参照して本発明の実施例を説明する。
【実施例1】
【0008】
図1ないし図8は本発明の実施例1に係り、図1は本発明の実施例1を備えたカプセル医療装置誘導システムの概略の構成を示す全体構成図、図2は図1のより詳細な構成を示すブロック図、図3は磁場発生装置の構成を示す概略図、図4はカプセル型医療装置の外観を示す側面図、図5はカプセル型医療装置の構成を示す概略図、図6はカプセル後端部の回転に伴って螺旋構造部の螺旋外径が変化される様子を示す説明図、図7は図5のカプセル型医療装置の第1変形例を示す概略図、図8は図5のカプセル型医療装置の第2変形例を示す概略図である。
【0009】
図1、図2及び図3に示すように被検体内挿入装置としてのカプセル型医療装置誘導システム(以下、カプセル誘導システムと略記)1は、挿入部本体としてのカプセル型医療装置(以下、単にカプセルと略記)3と、カプセル制御装置(以下、単に制御装置と略記)4と、磁場発生装置5と、交流電源装置6とを有している。
【0010】
前記カプセル3は、(図1に示す)患者2の体腔内に挿入され、体腔内を検査するためのカプセル形状に形成される。前記制御装置4は、患者2の外部に配置され、前記カプセル3と電波を送受信して、このカプセル3の動作を制御したり、カプセル3から送信される情報を受信するパソコン等で構成される。前記磁場発生装置5は、前記カプセル3に印加する回転磁場の方向等を制御してカプセル3を推進させたい方向に誘導する(図1では模式的に示す)。前記交流電源装置6は、前記磁場発生装置5に回転する磁場(より広義には電磁場)を発生させるための交流電源を供給する。
【0011】
図2に示すように前記磁場発生装置5は、例えば3つの電磁石5a,5b,5cで形成されている。この磁場発生装置5は、前記交流電源装置6から供給される交流電源を前記制御装置4により制御されることにより、3軸方向に回転磁場を発生できるようにしている。なお、図3では、磁場発生装置5を3軸方向に形成した(中空の立方体形状の)3軸ヘルムホルツコイルで模式的に示している。
【0012】
前記カプセル3は、前記磁場発生装置5により形成される回転磁場に応答して力が作用する磁場応答部であるマグネット8を有している。このマグネット8は、例えばカプセル3の長手中心軸上でこの中心軸と直交する方向と、マグネット8の磁化方向が一致するように配置され、図示しない接着剤等で固定されている。これにより、前記カプセル3は、前記磁場発生装置5で発生される回転磁場がマグネット8に作用し、このマグネット8が受ける回転力によりカプセル3が回転するようになっている。すなわち、前記マグネット8は、回転機構を構成している。
【0013】
なお、前記マグネット8は、ネオジウム磁石、サマリウムコバルト磁石、フェライト磁石、鉄・クロム・コバルト磁石、プラチナ磁石、アルニコ(AlNiCo)磁石などの永久磁石である。ネオジウム磁石、サマリウムコバルト磁石などの希土類系磁石は、磁力が強く、カプセルに内蔵する磁石を小さくできるメリットがある。一方、フェライト磁石は、安価であるというメリットがある。更に、プラチナ磁石は、耐腐食性が優れている。
【0014】
また、このマグネット8は、永久磁石に限らず、コイルで形成されるものでも良い。この場合、マグネット8は、内蔵電池等の電源からの電流によってコイルに磁力を発生させても良いし、内蔵コンデンサなどに一次的に蓄積した電力でコイルを磁石化させる方法でも良い。更に、マグネット8は、内蔵電源でなく、内部コイルによって発電させ、この電力をコンデンサに蓄えて別のコイルを磁石化させる方法でも良い。この場合、マグネット8は、内蔵電池の容量制限が無くなり、長時間の稼動が可能になる。なお、発電用のコイルと磁石用のコイルとは、兼用しても良い。
【0015】
前記磁場発生装置5は、患者2の周囲に配置される(図2参照)。前記交流電源装置6は、前記制御装置4により交流電源を制御され、前記マグネット8に対して前記カプセル3を推進する方向に前記磁場発生装置5に回転磁場を形成させる。これにより、患者2の体腔内管路内に挿入されたカプセル3は、円滑にかつ効率良く推進(誘導)させることができるようにしている。前記磁場発生装置5による回転磁場の方向は、前記制御装置4に接続された操作入力装置9を操作することにより、制御できる。
【0016】
図1に示すように前記制御装置4は、パソコン本体11と、キーボード12と、モニタ13と、体外アンテナ14と、操作入力装置9とを有する。前記パソコン本体11は、前記カプセル3及び前記磁場発生装置5(の交流電源)を制御する機能を備えている。前記キーボード12は、前記パソコン本体11に接続され、コマンド、データ等の入力を行う。前記モニタ13は、前記パソコン本体11に接続され、画像等を表示する。前記体外アンテナ14は、前記パソコン本体11に接続され、カプセル3を制御する制御信号の発信及びカプセル3からの信号を受信する。前記操作入力装置9は、前記パソコン本体11に接続され、回転磁場の方向等を入力操作する。
【0017】
前記制御装置4は、図2に示すようにCPU15を内蔵している。このCPU15は、前記カプセル3及び前記磁場発生装置5を制御する制御信号をキーボード12及び操作入力装置9からの入力或いはパソコン本体11内のハードディスク16(図2参照)等に格納された制御プログラムに基づいて生成する。
【0018】
前記磁場発生装置5を制御する制御信号は、パソコン本体11から接続ケーブルを介して交流電源装置6へ伝達される。その制御信号に基づいて、前記磁場発生装置5は、回転磁場を発生する。その回転磁場によりカプセル3は、磁場発生装置5で発生された回転磁場により内部のマグネット8に対して磁気的に作用され回転されることで、後述の螺旋構造部により推進するための動力を得られるようにしている。
【0019】
前記カプセル3を制御する制御信号は、パソコン本体11内の発振回路を経て所定の周波数の搬送波で変調され、体外アンテナ14から電波として発振されるようになっている。前記カプセル3は、後述のアンテナ27で電波を受信し、制御信号が復調され、各構成回路等へ出力するようになっている。また、前記制御装置4は、カプセル3の無線アンテナ27から送信される映像信号等の情報(データ)信号を体外アンテナ14で受信して、モニタ13上に表示するようになっている。
【0020】
図2に示すようにカプセル3内には、前記マグネット8の他に、光学像を結ぶ対物光学系21と、その結像位置に配置される撮像素子22と、対物光学系21の周囲に配置された照明素子23とを有している。また、カプセル3内には、信号処理回路24と、メモリ25と、無線回路26と、アンテナ27と、カプセル制御回路28と、バッテリ29とが収納されている。
【0021】
前記信号処理回路24は、前記撮像素子22で撮像された信号に対する信号処理を行う。前記メモリ25は、前記信号処理回路24により生成されたデジタル映像信号を一時記憶する。前記無線回路26は、前記メモリ25から読み出した映像信号を高周波信号で変調して無線送信する信号に変換したり、制御装置4から送信される制御信号を復調等する。前記アンテナ27は、前記体外アンテナ14と電波の送受信を行う。前記カプセル制御回路28は、前記信号処理回路24等のカプセル3を制御する。前記バッテリ29は、前記信号処理回路24等カプセル3内部の電気系に動作用の電源を供給する。なお、前記カプセル3内には、後述するように螺旋外径変化手段を構成しているモータ30が設けられている。
【0022】
また、前記制御装置4を構成するパソコン本体11は、無線回路31と、データ処理回路32と、CPU15と、ハードディスク16とを有している。無線回路31は、前記体外アンテナ14に接続され、(カプセル3側の)無線回路26と無線通信を行う。データ処理回路32は、前記無線回路31と接続され、カプセル3から送られた画像データに対する画像表示等のデータ処理等を行う。CPU15は、前記データ処理回路32や前記交流電源装置6等を制御する制御手段である。ハードディスク16は、プログラムやデータ等を格納する。
【0023】
前記CPU15には、回転磁場の方向を設定する操作をする操作入力装置9やコマンド及びデータ入力を行うキーボード12が接続されている。前記データ処理回路32には、モニタ13が接続されている。このモニタ13には、前記撮像素子22で撮像され、無線回路26、31を経てデータ処理回路32により処理された画像等が表示される。また、このデータ処理回路32は、カプセル3が回転されながら画像を撮像するので、モニタ13に表示される際の画像の向きを一定の方向に補正する処理を行い、術者が見易い画像を表示できるように画像処理を行う。
【0024】
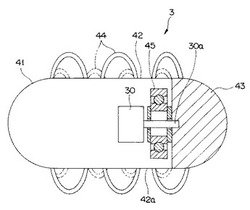
図4に示すように前記カプセル3は、略半球形状の先端カバー41と、略円筒状のカプセル本体42と、略半球状のカプセル後端部43とを有して構成されている。前記先端カバー41は、透明部材により形成されており、前記カプセル本体42に気密に接続されている。前記カプセル本体42は、前記先端カバー41と一体に気密に構成されている。前記カプセル後端部43は、前記カプセル本体42に対して所定角度回転自在に構成され、気密に構成されている。
【0025】
前記カプセル本体42の外表面42aには、管腔内壁に接触して回転することにより回転運動を推進力に変換する推進発生用の螺旋構造部44が設けられている。この螺旋構造部44は、前記カプセル本体42の外表面42aに対して径方向に分離して螺旋状に巻回されている。
【0026】
前記螺旋構造部44は、その先端側がカプセル本体42の円筒外周面を経て前記先端カバー41まで延出され、その先端44aは前記先端カバー41の途中部分、具体的には対物レンズ21による視野角内に入らない位置に固定されている。また、この螺旋構造部44の後端44bは、前記カプセル後端部43の境界付近まで延出され固定されている。なお、前記螺旋構造部44は、一方の螺旋構造部44の中間位置にさらに螺旋構造部44を設けて二重(2条)に形成されている。
【0027】
図5に示すように前記カプセル本体42と前記カプセル後端部43とは、ベアリング45を介在させて回転自在に接続されている。前記カプセル本体42には、前記カプセル後端部43を回転自在に所定角度回転させるモータ30が設けられている。なお、このモータ30は、例えばパルスモータである。このモータ30の駆動軸30aは、前記ベアリング45内を挿通して前記カプセル後端部43に接続されている。したがって、カプセル3は、前記モータ30を所定角度回転することにより、前記カプセル本体42に対して前記カプセル後端部43が所定角度回転される。
【0028】
これにより、前記カプセル3は、体腔内管路の管路径に応じて図6に示すように前記カプセル後端部43が所定角度回転されることにより、前記螺旋構造部44の先端44aの固定位置に対して前記螺旋構造部44の後端44bの固定位置が所定角度回転する。これにより、前記カプセル3は、外周方向に移動し、前記螺旋構造部44の螺旋外径を変化させることができる。なお、前記モータ30は、図示しないモータ制御回路に接続されており、このモータ制御回路は、前記制御装置4から送信される制御信号に基づいて前記モータ30を制御駆動するようになっている。
【0029】
次にカプセル誘導システム1による動作を以下に説明する。
術者は、図1に示すように、患者2の例えば十二指腸51側或いは小腸側等の体腔内管路内を観察する必要がある場合、カプセル3を患者2に飲み込ませる。なお、カプセル3は、予め飲み込み易いように螺旋構造部44の螺旋外径が最小径となるように設定される。
【0030】
また、術者は、患者2に飲み込ませる直前に、カプセル3の図示しないスイッチをオンにし、バッテリ29の電力が照明素子23等伝達されるようにする。同時に、術者は、磁場発生装置5を起動(オン)し、この磁場発生装置5により発生する回転磁場により体腔内管路内においてカプセル3が目的部位側に到達し易いよう磁気的に制御する。
【0031】
上述したようにカプセル3は、磁場発生装置5により発生される回転磁場にマグネット8が作用すると、このマグネット8が受ける作用によりカプセル本体42が回転する。
カプセル3は、前記カプセル本体42の回転によって、体腔内管路において前記螺旋構造部44と管腔内壁との接触部分に雄ねじが雌ねじに対して移動するような、カプセル本体42を前進させる推進力が発生して前進する。また、カプセル3は、回転磁場の回転に伴い、マグネット8の回転平面と回転磁場の回転平面とが一致するようにカプセル本体42が回転しながら進行方向(向き)が変更される。このとき、カプセル3は、カプセル本体42が偏芯運動等の無駄な動きをすることなく、体腔内管路内をスムーズに目的部位側に向けて推進することができる。
【0032】
カプセル3は、口腔52から食道53を通過し、胃54内部へ到達する。術者は、胃54内部を観察する必要がある場合、制御装置4の例えばキーボード12から観察開始のコマンドに対応するキー入力を行う。すると、このキー入力による制御信号は、制御装置4の体外アンテナ14を経て電波で放射されてカプセル3側に送信される。
【0033】
カプセル3は、アンテナ27で受信した信号により、動作開始の信号を検出し、照明素子23、撮像素子22、信号処理回路24等が駆動状態となる。カプセル3は、照明素子23からの照明光が体腔内管路の目的部位を照明する。照明された目的部位の反射光は、対物レンズ21を介して光学像として取り込まれ撮像素子22に結像されて光電変換される。撮像素子22からの撮像信号は、信号処理回路24によりA/D変換されてデジタル信号処理された後、圧縮処理される。圧縮処理されたデジタル信号は、メモリ25に格納された後、無線回路26で変調され、アンテナ27から電波で放射される。
【0034】
この電波は、制御装置4の体外アンテナ14で受信され、パソコン本体11内の無線回路31で復調される。復調された信号は、さらにA/D変換されてデータ処理回路32によりデジタル映像信号に変換され、データ処理回路32のメモリやハードディスク16に格納されると共に、所定の速度で読み出されてモニタ13に出力される。モニタ13には、カプセル3で取得した光学画像がカラー表示される。
【0035】
術者は、このモニタ画像を観察することにより、患者2の胃54内部等を観察することができる。術者は、操作入力装置9のジョイスティックなどの操作手段を用いて、胃54内全域の観察が行えるように外部磁力のかけ方を容易にコントロールできる。術者は、胃54内の観察が終了した後、カプセル3に対して磁場発生装置5で発生される回転磁場の向きを制御することにより、磁気的に誘導して胃54から十二指腸51側に移動させることができる。
【0036】
術者は、十二指腸51においても、その管腔の向きに進行させるように回転磁場の向きを制御することにより円滑にカプセル3を推進させることができる。また、術者は、小腸のように屈曲した管路内を進行させる場合においても螺旋状突起44がカプセル本体42の球面状の端部付近にまで形成してあるので、カプセル3を屈曲した管路内でも円滑に進行させることができる。
【0037】
このとき、術者は、モニタ画像により体腔内管路の管路径に応じて操作入力装置9やキーボード12を操作してカプセル3の螺旋構造部44を所望の螺旋外径となるように指示することができ、所望の推進力を得ることができる。さらに具体的に説明すると、術者は、螺旋構造部44の螺旋外径よりも体腔内管路の管路径が大きくてこの管腔内壁と螺旋構造部44との接触状態が良好でなく、十分な推進力を得られない場合、螺旋構造部44の螺旋外径を大きくするよう指示する。
【0038】
術者は、制御装置4の例えばキーボード12からコマンドに対応するキー入力を行う。このキー入力による制御信号は、制御装置4の体外アンテナ14を経て電波で放射されてカプセル3側に送信される。カプセル3は、アンテナ27で受信した信号からモータ制御信号を検出し、このモータ制御信号に基づいてモータ制御回路がモータ30を制御駆動する。カプセル3は、螺旋構造部44の螺旋外径を大きくするようモータ30が所定角度回転してカプセル本体42に対してカプセル後端部43が所定角度回転する。
【0039】
このカプセル後端部43の回転に伴って、螺旋構造部44は、先端44aの固定位置に対して後端44bの固定位置が近づいて螺旋外径が大きくなる。これにより、カプセル3は、体腔内管路の管路径が大きいとき、管腔内壁と螺旋構造部44との接触状態が良好になり、十分な推進力を得ることができる。
【0040】
その後、螺旋構造部44の螺旋外径が体腔内管路の管路径以上となる場合、術者は、螺旋構造部44の螺旋外径を小さくするよう指示する。上述したように術者のキー入力による制御信号は、制御装置4の体外アンテナ14を経て電波で放射されてカプセル3側に送信され、カプセル3は、アンテナ27で受信した信号から検出したモータ制御信号に基づいてモータ制御回路がモータ30を制御駆動する。
【0041】
カプセル3は、螺旋構造部44の螺旋外径を小さくするようモータ30が所定角度逆回転してカプセル本体42に対してカプセル後端部43が所定角度逆回転する。このカプセル後端部43の逆回転に伴って、螺旋構造部44は、先端44aの固定位置に対して後端44bの固定位置が遠ざかり、螺旋外径を小さくする。
【0042】
これにより、カプセル3は、体腔内管路の管路径が小さいとき、螺旋構造部44の螺旋外径を小さくすることができるので、管腔内壁と螺旋構造部44との接触状態が良好になり、十分な推進力を得ることができる。したがって、カプセル3は、体腔内管路の管路径に応じて螺旋構造部44の螺旋外径を変化させることができる。
【0043】
このように本実施例によれば、体腔内管路の管路径に応じて螺旋構造部44の螺旋外径を変化させることができるので、螺旋構造部44の螺旋形状を適正に維持して安定した推進力が得られる。また、本実施例のカプセル3は、螺旋構造部44の先端44aと後端44bとの相対位置を変化させることで螺旋外径を変化するようにしているので、構造が簡単で小型化できる。また、本実施例のカプセル3は、カプセル後端部43による周方向の回転動作で螺旋構造部44の螺旋外径を変化させるので、螺旋外径の変化が推進力を得るための回転動作の邪魔にならず、体腔内管路の深部方向への挿入性が向上する。
【0044】
なお、前記カプセル3は、前記螺旋構造部44の先端44aの固定位置に対して後端44bの固定位置を変化させるように構成しているが、本発明はこれに限定されず、前記螺旋構造部44の先端44aの固定位置を変化させるように構成してもよいし、また、先端44a及び後端44bの両方とも固定位置を変化させるように構成してもよい。
【0045】
なお、カプセルは、モータ30の代わりにマグネット8を用いてカプセル後端部43を回転するようにしてもよい。図7に示すようにカプセル3Bは、カプセル本体42とベアリング45によって回転自在に構成されているカプセル後端部43に回転機構としてのマグネット8を配置固定している。
【0046】
このカプセル3Bは、前記マグネット8の回転によりカプセル本体42に対してカプセル後端部43を回転させるとともに、カプセル本体42とカプセル後端部43とを一体的に回転させて体腔内管路への推進力を得るようにしている。
【0047】
さらに具体的に説明すると、前記カプセル3Bは、前記磁場発生装置5による回転磁場に前記マグネット8が作用して常に螺旋構造部44の螺旋外径を大きくする方向にカプセル後端部43が回転するようになっている。前記カプセル3Bは、螺旋構造部44と管腔内壁とが接触すると、この管腔内壁に接触している螺旋構造部44の負荷に応じてカプセル後端部43が所定角度回転した後停止し、以降このカプセル後端部43とカプセル本体42とが一体的に回転し始めて体腔内管路への推進力が生じる。
【0048】
これにより、前記カプセル3Bは、管腔内壁との接触状態に応じて螺旋構造部44が最適な螺旋外径となり、螺旋構造部44の螺旋形状を適正に維持して安定した推進力が得られる。本変形例によれば、回転機構としてのマグネット8により、螺旋構造部44を最適な螺旋外径にすることができるとともに、推進力も得られるので構造が単純化され、小型化できる。また、本変形例のカプセル3Bは、回転時に管腔内壁と螺旋構造部44とが接触する方向に常に力が加わるので、安定した推進力が得られ、体腔内管路の深部方向への挿入性が向上する。
【0049】
また、カプセルは、渦巻ばねを用いてカプセル後端部43を所定角度回転するようにしてもよい。図8に示すようにカプセル3Cは、カプセル本体42とカプセル後端部43とを回転機構として渦巻ばね46によって回転自在に接続している。
【0050】
前記渦巻ばね46は、一端が前記カプセル本体42に固定され他端が前記カプセル後端部43に固定されており、前記螺旋構造部44の螺旋外径が常時大きくなる方向に付勢力を有する。これにより、カプセル3Cは、前記渦巻ばね46の付勢力に抗して前記螺旋構造部44が管腔内壁と接触して所定角度回転することにより、管腔内壁との接触状態に応じて螺旋構造部44が最適な螺旋外径となり、螺旋構造部44の螺旋形状を適正に維持して安定した推進力が得られる。
【0051】
本変形例によれば、体腔内管路の管路径に応じて自動的に螺旋構造部44の螺旋外径の径変化が可能となる。また、本変形例のカプセル3Cは、螺旋構造部44の螺旋外径の制御のためにエネルギを必要とせず、構造もシンプルなため、小型化できる。また、本変形例のカプセル3Cは、常に螺旋外径を広げる方向に力が発生するため、管腔内壁と螺旋構造部44との接触状態が保たれ、安定した推進力が得られ、体腔内管路の深部方向への挿入性が向上する。
【0052】
尚、本実施例は、体腔内を撮像するカプセル型内視鏡として機能するカプセルに本発明を適用して構成しているが、本発明はこれに限定されず、生体組織を採取する採取手段を有する組織採取型カプセル、薬剤を放出する薬剤放出型カプセル、生体組織を焼灼する焼治療型カプセルに本発明を適用しても構わない。
【実施例2】
【0053】
図9及び図10は本発明の実施例2に係り、図9は本発明の実施例2のカプセル型医療装置を示す説明図、図10は図9のカプセル型医療装置の構成を示す概略図である。
上記実施例1は螺旋外径変化手段として螺旋構造部44の先端44aと後端44bとのいずれか一方の固定位置をカプセル3の外周方向に移動させることにより螺旋外径を変化するように構成しているが、実施例2は螺旋外径変化手段としてカプセル本体42の外表面42aから離間している螺旋構造部44を膨張・収縮することで螺旋外径を変化させるように構成する。それ以外の構成は上記実施例1とほぼ同様なので、同じ構成には同じ符号を付して説明を省略する。
【0054】
図9及び図10に示すように実施例2のカプセル3Dは、形状記憶合金(以下、SMAと略記)コイル47を用いて螺旋構造部44を構成している。なお、本実施例2のカプセル3Dは、上記実施例1のカプセルと異なり、カプセル後端部43が回転することなくカプセル本体42と一体的に構成されている。
【0055】
前記螺旋構造部44は、弾性を有する伸縮自在な外装チューブ48内を前記SMAコイル47が挿通している。前記外装チューブ48は、先端48aが前記先端カバー41の途中部分、具体的には対物レンズ21による視野角内に入らない位置に固定され、後端48bが前記カプセル後端部43の境界付近まで延出され固定されている。
【0056】
前記SMAコイル47は、その両端が前記カプセル本体42内部に延出して前記バッテリ29とスイッチ29bとにより閉回路を構成している。前記スイッチ29bは、例えば前記制御装置4から送信される制御信号によりオンオフし、バッテリ29からの電力を前記SMAコイル47に供給または供給停止するようになっている。
【0057】
これにより、前記螺旋構造部44は、前記スイッチ29bがオンして前記バッテリ29から前記SMAコイル47に通電し、前記SMAコイル47が縮むとともに前記外装チューブ49が縮むことにより、結果として螺旋構造部44の全長が縮み螺旋外径が小さくなる。一方、前記螺旋構造部44は、通電を停止すると、前記外装チューブ48の弾性力により螺旋構造部44の全長が元に戻り(伸び)、螺旋外径が大きくなる。すなわち、SMAコイル47及び外装チューブ49、スイッチ29b、バッテリ29は、螺旋外径変化手段を構成している。
【0058】
したがって、前記カプセル3Dは、カプセル本体42の外表面42aから離間している螺旋構造部44を螺旋方向に膨張・収縮することで螺旋外径を変化させることができる。本実施例によれば、上記実施例1と同様な効果を得ることに加え、螺旋構造部44を螺旋方向に膨張・収縮することで螺旋外径を変化させることができ、螺旋形状に歪みを発生させること無く確実な螺旋外径の径変化を行える。
【実施例3】
【0059】
図11ないし図16は本発明の実施例3に係り、図11は本発明の実施例3のカプセル型医療装置を示す説明図、図12はバルーンの膨張・収縮に伴って螺旋構造部の螺旋外径が変化される様子を示す説明図、図13はバルーンが膨張したときのカプセル型医療装置を示す説明図、図14は図11のカプセル型医療装置の第1変形例を示す概略図、図15は図11のカプセル型医療装置の第2変形例を示す概略図、図16は図11のカプセル型医療装置の第3変形例を示す概略図である。
【0060】
上記実施例1は螺旋外径変化手段として螺旋構造部44の先端44aと後端44bとのいずれか一方の固定位置をカプセル3の外周方向に移動させることにより螺旋外径を変化するように構成しているが、実施例3はカプセル本体42と螺旋構造部との間にバルーンを設け、このバルーンを膨張・収縮することにより螺旋構造部の螺旋外径を変化させるように構成する。それ以外の構成は上記実施例1とほぼ同様なので、同じ構成には同じ符号を付して説明を省略する。
【0061】
図11ないし図13に示すように実施例3のカプセル3Eは、カプセル本体42を被覆するバルーン(弾性膜)61を設け、このバルーン61の外周面上に例えば、エラスティックチューブ、ゴム等の伸縮可能な弾性体または樹脂等のチューブ62により形成される螺旋構造部44Eを設けている。
【0062】
前記カプセル本体42の内部には、前記バルーン61に対して気体または液体等の流体を供給吸引するためのバルーン膨張・収縮手段としてのシリンダ部63が設けられている。前記バルーン61は、前記カプセル本体42に形成された貫通孔64を介して接続管路65に連通し、この接続管路65は前記シリンダ部63のシリンダ壁に形成された貫通孔67に連通している。
【0063】
前記シリンダ部63は、ピストンロッドとしてのSMAワイヤ68aの一端にピストン68bが設けられ、他端はシリンダ内壁に固定されている。また、前記シリンダ部63は、前記バルーン61を膨張させる方向に前記ピストン68bを常時付勢するコイルスプリング68cが前記SMAワイヤ68aの配置側に設けられている。
【0064】
前記SMAワイヤ68aは、上記実施例2のSMAコイル47と同様に図示しないバッテリ及びスイッチにより閉回路を構成し、例えば前記制御装置4から送信される制御信号によりスイッチがオンオフし、バッテリからの電力が供給または供給停止されるようになっている。前記SMAワイヤ68aは、スイッチがオンしてバッテリから通電されると、前記コイルスプリング68cの付勢力に抗して縮むことにより、前記バルーン61を収縮する方向にピストン68bをシリンダ内壁に摺動させるようになっている。
【0065】
したがって、前記シリンダ部63は、前記螺旋構造部44Eの螺旋外径が常に大きくなる方向に前記コイルスプリング68cが付勢して前記ピストン68bを摺動させて流体を供給し、前記バルーン61を膨張させる。一方、前記シリンダ部63は、前記SMAワイヤ68aが通電されることにより、このSMAワイヤ68aが前記コイルスプリング68cの付勢力に抗して縮み、前記螺旋構造部44Eの螺旋外径が小さくなる方向に前記ピストン68bをシリンダ内壁に摺動させて流体を吸引し、前記バルーン61を収縮させる。すなわち、シリンダ部63は、螺旋外径変化手段を構成している。
【0066】
これにより、カプセル3Eは、カプセル本体42と螺旋構造部44Eとの間にバルーン61を設け、このバルーン61を膨張・収縮することにより、螺旋構造部44Eの螺旋外径を変化させることができる。なお、前記カプセル3Eは、飲み込み易くするために予め糖衣等の生体適合性のある水溶性物質により前記バルーン61が固められて小型化されてもよい。
【0067】
本実施例によれば、上記実施例1と同様な効果を得ることに加え、カプセル本体42と螺旋構造部44Eとの間にバルーン61を設け、このバルーン61を膨張・収縮することにより螺旋構造部44Eの螺旋外径を変化させることができ、螺旋形状に歪みを発生させること無く確実な螺旋外径の径変化を行える。
【0068】
なお、カプセルは、SMAワイヤ68aの代わりにアクチュエータを用いてシリンダ部を構成してもよい。図14に示すようにカプセル3Fに設けられているシリンダ部63Fは、ピストンロッド69aを進退動させるためのアクチュエータ69を有して構成している。
【0069】
前記ピストンロッド69aは、シリンダ内壁の貫通孔69bを挿通して前記アクチュエータ69に噛合している。前記アクチュエータ69は、前記ピストンロッド69aを噛合する図示しないピニオンを有し、このピニオンを図示しないモータにより回転させて前記ピストンロッド69aを軸方向に進退させる軸方向移動アクチュエータである。このアクチュエータ69は、図示しない制御回路に接続されており、この制御回路は、前記制御装置4から送信される制御信号に基づいて前記アクチュエータ69を制御駆動するようになっている。
【0070】
したがって、前記シリンダ部63Fは、前記アクチュエータ69により前記ピストンロッド69aを軸方向に前進させることにより、前記螺旋構造部44Eの螺旋外径が大きくなる方向に前記ピストン68bを摺動させて流体を供給し、前記バルーン61を膨張させる。一方、前記シリンダ部63Fは、前記アクチュエータ69により前記ピストンロッド69aを軸方向に後退させることにより、前記螺旋構造部44Eの螺旋外径が小さくなる方向に前記ピストン68bをシリンダ内壁に摺動させて流体を吸引し、前記バルーン61を収縮させる。これにより、カプセル3Fは、上記実施例3と同様に螺旋構造部44Eの螺旋外径を変化させることができる。
【0071】
また、カプセルは、コイルスプリング68c及びピストン68bのみでシリンダ部を構成してもよい。図15に示すようにカプセル3Gに設けられているシリンダ部63Gは、コイルスプリング68c及びピストン68bのみで構成している。
【0072】
前記コイルスプリング68cは、前記バルーン61を膨張させる方向に前記ピストン68bを常時付勢している。これにより、カプセル3Gは、前記コイルスプリング68cの付勢力に抗して前記螺旋構造部44Eが管腔内壁と接触して外力がかかることにより、管腔内壁との接触状態に応じて螺旋構造部44Eが最適な螺旋外径となり、螺旋構造部44Eの螺旋形状を適正に維持して安定した推進力が得られる。
【0073】
本変形例によれば、体腔内管路の管路径に応じて自動的に螺旋構造部44Eの螺旋外径の径変化が可能となる。また、本変形例のカプセル3Gは、螺旋構造部44Eの螺旋外径の制御のためにエネルギを必要とせず、構造もシンプルなため、小型化できる。また、本変形例のカプセル3Gは、常に螺旋外径を広げる方向に力が発生するため、管腔内壁と螺旋構造部44Eとの接触状態が保たれ、安定した推進力が得られ、体腔内管路の深部方向への挿入性が向上する。
【0074】
また、カプセルは、発泡剤を用いてバルーン61を膨張させるように構成してもよい。図16に示すようにカプセル3Hは、カプセル本体42内にバルーン膨張・収縮手段として発泡剤収納部71と、ポンプ72と、水槽73とを有している。
【0075】
前記発泡剤収納部71は、収納室71a内に収納した複数の発泡剤タブレット74をコイルスプリング75により収納室71aの壁面に付勢するように構成している。この収納室71aには、前記接続管路65に連通する貫通孔72aと、前記ポンプ72との接続管路76に連通する貫通孔71cとが形成されている。なお、前記貫通孔71cは、前記コイルスプリング75の付勢により最先端に位置する発泡剤タブレット74に前記ポンプ72から送水された前記水槽73の水がかかる位置に形成されている。
【0076】
前記ポンプ72は、前記水槽73との接続管路77を介して前記水槽73に貯留されている水を吸引して前記貫通孔71cを介して前記発泡剤収納部71の前記発泡剤タブレット74に送水するようになっている。なお、前記ポンプ72は、図示しないポンプ制御回路に接続されており、このポンプ制御回路は、前記制御装置4から送信される制御信号に基づいて前記ポンプ72を制御駆動するようになっている。
【0077】
これにより、前記発泡剤収納部71は、前記ポンプ72から前記水槽73の水を送水され、この送水された水により最先端の発泡剤タブレット74を反応させて気化させることにより、前記バルーン61を膨張させる。なお、前記発泡剤タブレット74は、主成分が例えば炭酸水素ナトリウム、酒石酸であり、反応することにより二酸化炭素が発生する。
【0078】
前記バルーン61は、図示しない圧力開放弁が設けられており、圧力が所定値を超えると自動的にガスを開放するようにしている。なお、圧力開放弁は、圧力制御弁でもよく、これにより能動的に前記バルーン61の膨張量を制御できるようにしてもよい。さらにこのバルーン61を膨張させる場合は、前記コイルスプリング75により付勢されて次に最先端となる発泡剤タブレット74を反応させる。
【0079】
これにより、カプセル3Hは、上記実施例3と同様に螺旋構造部44Eの螺旋外径を変化させることができる。本変形例によれば、前記バルーン61を膨張させる圧力を化学的に発生することができるので、バルーン61を膨張させるためのエネルギが少なくてすみ、省エネ、バッテリサイズ縮小が可能である。なお、カプセル3Hは、前記水槽73をカプセル本体42内に設けず、被検体内の体液をカプセル本体42内に吸引し、発泡剤タブレット74を反応させてもよい。
【実施例4】
【0080】
図17ないし図20は本発明の実施例4に係り、図17は本発明の実施例4のカプセル型医療装置を示す説明図、図18は図17のカプセル型医療装置の構成を示す概略図、図19は図17のカプセル型医療装置の変形例を示す説明図、図20は図19のカプセル型医療装置の構成を示す概略図である。
【0081】
上記実施例1〜3は患者の周囲に設けた磁場発生装置により発生させた回転磁場によりカプセル内に設けたマグネットを作用させてカプセルを回転させるように構成しているが、実施例4はカプセルにモータを設けてこのカプセルが自発的に回転するように構成する。それ以外の構成は上記実施例1とほぼ同様なので、同じ構成には同じ符号を付して説明を省略する。
【0082】
図17及び図18に示すように実施例4のカプセル100は、カプセル本体101と、このカプセル本体101を回転させる回転ベース部102とを有して構成している。
前記カプセル本体101には、図示しないが上記実施例1と同様な対物光学系21、撮像素子22、及び照明素子23の他に、信号処理回路24、メモリ25、無線回路26、アンテナ27、カプセル制御回路28及びバッテリ29等の内蔵物が収納されている。また、前記カプセル本体101は、上記実施例3と同様にカプセル本体101を被覆するバルーン61を設け、このバルーン61の外周面上に弾性体のチューブ62により形成される螺旋構造部44Eを設けている。前記カプセル本体101は、上記実施例3またはその変形例と同様に前記バルーン61を膨張・収縮させるバルーン膨張・収縮手段を備えている。また、前記カプセル100は、飲み込み易くするために予め糖衣等の生体適合性のある水溶性物質により前記バルーン61が固められて小型化されてもよい。
【0083】
前記回転ベース部102は、前記カプセル本体101を回転させるための回転機構であるモータ103を配置している。このモータ103は、例えば回転モータである。前記モータ103のモータ軸103aは、前記カプセル本体101の後端部に嵌合固定され、前記回転ベース部102に対して前記カプセル本体101を相対的に回転させる。
【0084】
これにより、前記カプセル本体101は、前記モータ103の回転力により前記回転ベース部102に対し相対的に回転し、この回転を前記螺旋構造部44Eが推力(推進力)に変換して螺旋軸方向(螺旋軸104の方向)に推進力を発生する。なお、前記モータ103は、前記回転ベース部102に設けた第2バッテリ105から電源電力が供給される。
【0085】
また、前記回転ベース部102には、外表面に長手軸と平行に複数の溝部106が形成されている。これにより、前記カプセル100は、前記回転ベース部102が推進を妨げずに管腔内壁に対し回転することを防止している。なお、前記回転ベース部102には、前記モータ103に画像を角度補正するための図示しない角度検出手段を設けてもよい。この場合、カプセル100からは、角度検出手段からの角度情報を映像信号等の情報(データ)信号に関係付けて体外に送信する。
【0086】
このように構成されているカプセル100は、患者が飲み込むことにより体腔内管路に挿入される。カプセル100は、前記第2バッテリ105からの電源電力を供給されて前記モータ103が駆動し、前記カプセル本体101が回転する。前記カプセル本体101は、前記モータ103のモータ軸103aから回転力を伝達され、このモータ103の回転力により前記回転ベース部102に対し相対的に回転する。このとき、上述したように前記回転ベース部102は、外表面に形成した溝部106により推進を妨げずに管腔内壁に対して回転することを防止している。
【0087】
前記カプセル100は、前記カプセル本体101の回転によって、螺旋構造部44Eと管腔内壁との接触部分に雄ねじが雌ねじに対して移動するような、カプセル本体101を前進させる推進力が発生する。これにより、カプセル100は、前記カプセル本体101が螺旋軸方向(螺旋軸104の方向)に推進力を発生し、前進することができる。
【0088】
本実施例によれば、上記実施例1と同様な効果を得ることに加え、カプセル100が回転機構としてモータ103を内蔵しているので自走でき、磁場発生装置5及び交流電源装置6等の磁気誘導のような体外装置が不要であり、システム全体を小型化できる。
【0089】
なお、本実施例のカプセル100は、上記実施例3と同様にカプセル本体101と螺旋構造部44Eとの間にバルーン61を設け、このバルーン61を膨張・収縮することにより螺旋構造部44Eの螺旋外径を変化させるように構成しているが、本発明はこれに限定されず、上記実施例1または実施例2と同様な機構を設けて螺旋構造部44の螺旋外径を変化させるように構成しても構わない。
【0090】
なお、カプセルは、前記回転ベース部102を中心に前記カプセル本体101を2つ設けて構成してもよい。図19及び図20に示すように、カプセル100Bは、回転ベース部102を中心に前記カプセル本体101を2つ設けて構成されている。
【0091】
更に具体的に説明すると、前記カプセル100Bは、回転ベース部102と、この回転ベース部102に取り付けられた第1モータ106a,第2モータ106bにより前記回転ベース部102に対して相対的に回転する前方側カプセル本体101a及び後方側カプセル本体101bとを有して構成されている。これら前方側カプセル本体101aと後方側カプセル本体101bとは、前記バルーン61に形成される前記螺旋構造部44Eが互いに逆向きとなるように形成されている。尚、前方とは、撮像素子22の向いている方向と定義する。
【0092】
前記回転ベース部102には、前記前方側カプセル本体101aを回転させる第1モータ106aと、前記後方側カプセル本体101bを回転させる第2モータ106bと、これら第1モータ106a,第2モータ106bを駆動するための電源電力を供給する第2バッテリ105が設けられている。
これにより、前記カプセル100Bは、一方のカプセル本体101(前方側カプセル本体101a又は後方側カプセル本体101b)が管腔内壁に接触せずに推進できない場合でも、他方のカプセル本体101(後方側カプセル本体101b又は前方側カプセル本体101a)が管腔内壁に接触するよう補助して推進し続けることができる。
【0093】
なお、前記カプセル100Bは、前記前方側カプセル本体101aと前記後方側カプセル本体101bとに設けた螺旋構造部44Eが互いに逆向きに巻回されているが、本発明はこれに限定されず、同じ向きに巻回してもよい。この場合、前記前方側カプセル本体101aと前記後方側カプセル本体101bとは同じ推進方向となるように回転する。
【実施例5】
【0094】
図21及び図22は本発明の実施例5に係り、図21は本発明の実施例5の内視鏡挿入部を示す説明図、図22は図21の内視鏡挿入部の構成を示す概略図である。
上記実施例1〜4は被検体内挿入装置として体腔内管路を独立に移動可能なカプセルに本発明を適用して構成しているが、実施例5は被検体内挿入装置としてカプセル状部を先端に有する内視鏡挿入部に本発明を適用して構成する。それ以外の構成は上記実施例1とほぼ同様なので、同じ構成には同じ符号を付して説明を省略する。
【0095】
図21及び図22に示すように実施例5の被検体内挿入装置としての内視鏡挿入部110は、体腔内管路に挿入する細長で可撓性を有する挿入チューブ111の先端にカプセル状部112を設けて構成している。
【0096】
前記カプセル状部112は、上記実施例3と同様にカプセル状部112の外表面112aにバルーン61を設け、このバルーン61の外周面上に弾性体のチューブ62により形成される螺旋構造部44Eを設けている。前記カプセル状部112は、飲み込み易くするために予め糖衣等の生体適合性のある水溶性物質により前記バルーン61が固められて小型化されてもよい。前記カプセル状部112は、先端側容器113と後端側容器114とが接着剤で接着固定されて一体的に構成されている。前記先端側容器113には、図示しないが上記実施例1と同様な対物光学系21、撮像素子22、及び照明素子23等の内蔵物が収納されている。
【0097】
前記後端側容器114には、前記挿入チューブ111の先端側が取り付けられており、この挿入チューブ111に対してベアリング115にて回転自在となっている。尚、前記後端側容器114と前記挿入チューブ111との間には、Oリング116にて気密に構成されている。これにより、前記カプセル本体112は、前記挿入チューブ111に対して前記先端側容器113と後端側容器114とが一体的に回転自在となっている。
【0098】
前記挿入チューブ111の先端側には、前記先端側容器113と後端側容器114とを一体的に回転させるモータ117が取り付けられている。前記先端側容器113には、前記モータ117を収納するモータ収納室118が設けられている。前記モータ117のモータ軸117aは、前記モータ収納室118の収納壁に嵌合固定されている。これにより、前記モータ117は、前記挿入チューブ111に対して前記カプセル状部112を回転させることができる。
【0099】
前記先端側容器113には、前記モータ収納室118から外周表面へ向けて貫通孔119が形成され、前記モータ収納室118を介して前記バルーン61へエアを供給可能である。前記挿入チューブ111には、前記バルーン61へエアを供給するための管路120が形成されている。なお、この管路には、撮像素子22から得た映像信号を伝達する信号線、前記モータ117の電源線等の信号線が配設される。
【0100】
前記挿入チューブ111の後端側は、図示しない制御装置に接続されている。この制御装置は、前記モータ117を制御駆動するモータ制御回路、映像信号等を信号処理するデータ処理回路の他に、前記バルーン61にエアを供給するコンプレッサを設けている。
【0101】
このように構成されている内視鏡挿入部110は、体腔内管路に挿入される。内視鏡挿入部110は、制御装置からの電源電力を供給されて前記モータ117が駆動され、前記カプセル状部112が回転する。前記内視鏡挿入部110は、前記カプセル状部112の回転によって、前記螺旋構造部44Eと管腔内壁との接触部分に雄ねじが雌ねじに対して移動するような、カプセル状部112を前進させる推進力が発生して前進する。
【0102】
このとき、術者は、螺旋構造部44Eの螺旋外径よりも体腔内管路の管路径が大きくてこの管腔内壁と螺旋構造部44Eとの接触状態が良好でなく、十分な推進力を得られない場合、螺旋構造部44Eの螺旋外径を大きくするよう制御装置を操作する。制御装置は、コンプレッサを駆動して前記内視鏡挿入部110にエアを供給する。
【0103】
前記内視鏡挿入部110は、前記挿入チューブ111の管路120からエアを供給され、このエアは前記カプセル状部112のモータ収納室118から貫通孔119を介して前記バルーン61に導かれる。前記バルーン61は、膨張して前記螺旋構造部44Eの螺旋外径を大きくする。これにより、内視鏡挿入部110は、螺旋構造部44Eの螺旋外径を大きくすることができるので、管腔内壁と螺旋構造部44Eとの接触状態を良好にして、十分な推進力を得ることができる。
【0104】
その後、逆に螺旋構造部44Eの螺旋外径が体腔内管路の管路径以上となる場合、術者は、螺旋構造部44Eの螺旋外径を小さくするよう制御装置を操作する。制御装置は、コンプレッサを駆動して前記内視鏡挿入部110からエアを吸引する。この場合、前記内視鏡挿入部110は、上記したエア供給と逆の経路により、前記バルーン61からエアが吸引される。前記バルーン61は、収縮して前記螺旋構造部44Eの螺旋外径を小さくする。
【0105】
これにより、内視鏡挿入部110は、螺旋構造部44Eの螺旋外径を小さくすることができるので、管腔内壁と螺旋構造部44Eとの接触状態を良好にして、十分な推進力を得ることができる。したがって、内視鏡挿入部110は、体腔内管路の管路径に応じて螺旋構造部44Eの螺旋外径を変化させることができる。
【0106】
このように本実施例によれば、体腔内管路の管路径に応じて螺旋構造部44Eの螺旋外径を変化させることができるので、螺旋構造部44Eの螺旋形状を適正に維持して安定した推進力が得られる。また、本実施例の内視鏡挿入部110は、挿入チューブ111からエアを供給するので、カプセル状部112にポンプ等を設ける必要がなく、カプセル状部112を小型化できる。さらに、本実施例の内視鏡挿入部は、バルーン61に対してエア供給排出が手元側の制御装置により直接操作指示できるので、操作性がよい。なお、前記内視鏡挿入部110は、前記カプセル状部112が前記挿入チューブ111から着脱自在に取り付け可能に構成してもよい。
【0107】
また、本実施例の内視鏡挿入部110は、上記実施例3と同様にカプセル状部112と螺旋構造部44Eとの間にバルーン61を設け、このバルーン61を膨張・収縮することにより螺旋構造部44Eの螺旋外径を変化させるように構成しているが、本発明はこれに限定されず、上記実施例1または実施例2と同様な機構を設けて螺旋構造部44の螺旋外径を変化させるように構成しても構わない。
【0108】
さらに、前記内視鏡挿入部110は、先端部のカプセル状部112にバルーン61を設け、このバルーン61上に螺旋構造部44Eを形成して構成しているが、本発明はこれに限定されず、挿入チューブ111の複数個所にバルーン61を設け、このバルーン61上に螺旋構造部44Eを形成して構成してもよい。
【0109】
また、本実施例は、内視鏡挿入部110に本発明を適用して構成しているが、本発明はこれに限定されず、カプセル状部を先端に有するプローブ、内視鏡挿入部を体腔内管路の深部へ導く挿入補助具等に本発明を適用して構成しても構わない。
【実施例6】
【0110】
図23ないし図25は本発明の実施例6に係り、図23は本発明の実施例6のカプセル型医療装置の構成を示す概略図、図24は図23のカプセル型医療装置の第1変形例を示す概略図、図25は図23のカプセル型医療装置の第2変形例を示す概略図である。
【0111】
上記実施例1は螺旋外径変化手段として螺旋構造部44の先端44aと後端44bとのいずれか一方の固定位置をカプセル3の外周方向に移動させることにより螺旋外径を変化するように構成しているが、実施例6は螺旋外径変化手段として前記カプセル本体42の外表面42aから離間している螺旋構造部44の長さを螺旋方向に変更することで螺旋外径を変化させるように構成する。それ以外の構成は上記実施例1とほぼ同様なので、同じ構成には同じ符号を付して説明を省略する。
【0112】
図23に示すように実施例6のカプセル3Iは、カプセル後端部43に前記螺旋構造部44の後端44bが固定されている。前記螺旋構造部44は、先端44aが前記カプセル本体42に形成された貫通路42cを挿通して前記カプセル本体42内部に配設されたアクチュエータ121に接続されている。前記カプセル本体42の貫通路42cには、水密を確保するためのOリング122が設けられている。
【0113】
前記アクチュエータ121は、前記螺旋構造部44を巻き取り、送り出すために回転運動を行うロータリーアクチュエータである。このアクチュエータ121は、図示しない制御回路に接続されている。この制御回路は、前記制御装置4から送信される制御信号に基づいて前記アクチュエータ121を制御駆動するようになっている。
【0114】
前記アクチュエータ121は、正逆自在に回転することにより前記螺旋構造部44の先端44aを巻き取り、送り出して、前記カプセル本体42の外表面42aから離間している前記螺旋構造部44の長さを変更することで螺旋外径を変化させるようになっている。さらに具体的に説明すると、前記アクチュエータ121は、前記螺旋構造部44の先端44aを送り出す方向に回転することにより、前記カプセル本体42の外表面42aから離間している螺旋構造部44を長くすることで螺旋外径を大きくする。一方、前記アクチュエータ121は、前記螺旋構造部44の先端44aを巻き取る方向に回転することにより、前記カプセル本体42の外表面42aから離間している螺旋構造部44を短くすることで螺旋外径を小さくする。
【0115】
したがって、前記カプセル3Iは、カプセル本体42の外表面42aから離間している螺旋構造部44を螺旋方向に巻き取り、送り出すことで螺旋全長を変更し、螺旋外径を変化させることができる。本実施例によれば、上記実施例1と同様な効果を得ることに加え、カプセル本体42の外表面42aから離間している螺旋構造部44の螺旋全長を変更して螺旋外径を変化させることができるので、螺旋形状に歪みを発生させること無く確実な螺旋外径の径変化を行える。また、本実施例によれば、前記螺旋構造部44の長さを前記アクチュエータ121により制御しているので、より確実な制御が可能となる。なお、前記カプセル3Iは、前記螺旋構造部44の先端44aを固定して後端44bが巻き取り、送り出される構成でも構わない。
【0116】
また、前記カプセル3Iは、前記アクチュエータ121の代わりに図示しない回転ばねを用いて構成してもよい。この回転ばねは、前記螺旋構造部44に加わる外力に応じてこの螺旋構造部44の先端44aの巻き取り、送り出しを行う。
【0117】
さらに具体的に説明すると、前記回転ばねは、前記螺旋構造部44の螺旋外径が常時大きくなる方向に付勢力を有し、この付勢力に抗して前記螺旋構造部44が管腔内壁と接触することにより、前記螺旋構造部44の先端44aの巻き取り、送り出しを行う。
【0118】
したがって、前記カプセル3Iは、前記カプセル本体42の外表面42aから離間している前記螺旋構造部44と管腔内壁との接触状態に応じてこの螺旋構造部44が最適な螺旋外径となり、螺旋構造部44の螺旋形状を適正に維持して安定した推進力が得られる。
【0119】
本変形例によれば、体腔内管路の管路径に応じて自動的に螺旋構造部44の螺旋外径の径変化が可能となる。また、本変形例によれば、螺旋構造部44の螺旋外径の制御のためにエネルギを必要とせず、構造もシンプルなため、小型化できる。また、本変形例によれば、常に螺旋外径を広げる方向に力が発生するため、管腔内壁と螺旋構造部44との接触状態が保たれて安定した推進力が得られ、体腔内管路の深部方向への挿入性が向上する。
【0120】
さらに、カプセルは、SMAコイルを用いて前記螺旋構造部44の巻き取りを行うように構成してもよい。
図24に示すようにカプセル3Jは、回転ばね123と、SMAコイル124とを設けて構成している。前記SMAコイル124は、前記回転ばね123から延出する前記螺旋構造部44の先端44aが一端に接続されている。また、前記SMAコイル124は、他端が固定板125に接続固定されている。
【0121】
前記SMAコイル124は、図示しないバッテリ及びスイッチにより閉回路を構成し、例えば前記制御装置4から送信される制御信号によりスイッチがオンオフし、バッテリからの電力が供給または供給停止されるようになっている。前記SMAコイル124は、通常伸びている状態であり、スイッチがオンしてバッテリから通電されると縮み、前記螺旋構造部44の先端44aを巻き取るようになっている。これにより、前記カプセル3Jは、前記SMAコイル124に通電して前記螺旋構造部44の先端44aの巻き取りを行うことにより、前記螺旋構造部44の螺旋外径を最小にすることができる。
【0122】
したがって、前記カプセル3Jは、前記回転ばね123の付勢力により前記螺旋構造部44と管腔内壁との接触状態に応じてこの螺旋構造部44が最適な螺旋外径となり、螺旋構造部44の螺旋形状を適正に維持して安定した推進力が得られる。また、前記カプセル3Jは、前記SMAコイル124に通電して前記螺旋構造部44の螺旋外径を最小にすることにより比較的狭い管腔内を移動できる。
【0123】
本実施例によれば、前記螺旋構造部44の螺旋外径を小さくする場合のみ通電するので、比較的広い管腔内を移動する場合、省エネルギ化が可能である。特に、本実施例によれば、腸等の管腔内の気体、液体量が多い場合、又は送気、送水等により広げられた管腔内を移動する場合に有効である。
【0124】
また、カプセルは、前記SMAコイル124により送り出しを行い、前記回転ばね123により巻き取りを行うように構成してもよい。
図25に示すようにカプセル3Kは、前記カプセル3Jとは逆方向に前記螺旋構造部44が前記回転ばね123から延出している。このため、前記カプセル3Kは、通電すると前記SMAコイル124が縮んで前記螺旋構造部44の先端44aを引っ張ることにより前記回転ばね123を逆回転させ、前記螺旋構造部44が送り出されるようになっている。
【0125】
これにより、前記カプセル3Jは、前記SMAコイル124に通電して前記螺旋構造部44の先端44aを引っ張ることにより、前記螺旋構造部44の螺旋外径を大きくすることができる。
【0126】
したがって、前記カプセル3Kは、前記SMAコイル124に通電して前記螺旋構造部44の螺旋外径を大きくすることにより比較的広い管腔内において前記螺旋構造部44が管腔内壁に接触し、良好な接触状態を維持できる。また、前記カプセル3Kは、前記SMAコイル124が非通電状態のとき、前記回転ばね123の付勢力により前記螺旋構造部44と管腔内壁との接触状態に応じてこの螺旋構造部44が最適な螺旋外径となり、螺旋構造部44の螺旋形状を適正に維持して安定した推進力が得られる。
【0127】
本実施例によれば、前記螺旋構造部44の螺旋外径を大きくする場合のみ通電するので、比較的狭い管腔内を移動する場合、省エネルギ化が可能である。
【実施例7】
【0128】
図26及び図27は本発明の実施例7に係り、図26は本発明の実施例7のカプセル型医療装置の構成を示す概略図、図27は図26の螺旋構造部及び弾性体の動作を示す概略図である。
実施例7は上記実施例1の内部構成に加え、カプセル本体42の外表面42aと螺旋構造部44との間の距離を螺旋全長に亘って均一に保持可能に構成する。それ以外の構成は上記実施例1とほぼ同様なので、同じ構成には同じ符号を付して説明を省略する。
【0129】
図26に示すように実施例7のカプセル3Lは、上記実施例1の内部構成に加え、カプセル本体42の外表面42aと螺旋構造部44との間の距離を螺旋全長に亘って均一に保持可能に構成している。
【0130】
さらに具体的に説明すると、前記カプセル3Lは、前記実施例1と同様に前記螺旋構造部44の先端44a及び後端44bがカプセル本体42の外表面42aに固定配置されるとともに、前記カプセル本体42に対して前記カプセル後端部43が所定角度回転自在に構成されている。
【0131】
したがって、前記カプセル3Lは、前記実施例1と同様に前記カプセル後端部43が所定角度回転されることにより、前記螺旋構造部44の先端44aの固定位置に対して前記螺旋構造部44の後端44bの固定位置が前記カプセル本体42の外周方向に移動し、前記螺旋構造部44の螺旋外径を変化させることができる。
【0132】
さらに、前記カプセル3Lは、前記カプセル本体42の外表面42aと螺旋構造部44との間の距離を螺旋全長に亘って均一に保持可能な柱状の弾性体(以下、柱状弾性体)126を前記螺旋構造部44の複数個所に設けている。また、前記カプセル3Lは、前記カプセル本体42の外表面42aに前記柱状弾性体126が摺動可能な周溝127を複数個所形成している。前記柱状弾性体126は、前記螺旋構造部44に一端が固定され、他端が前記周溝127を摺動可能となっている。この柱状弾性体126は、例えば樹脂、シリコーンにより形成されている。
【0133】
このような構成のカプセル3Lは、体腔内管路の管路径に応じてカプセル後端部43が回転して螺旋構造部44の螺旋外径を変化させる。と同時に、図27に示すように前記柱状弾性体126は、前記螺旋外径の変化に伴って曲がりつつ、前記周溝127を摺動して螺旋形状の変化を吸収することができる。したがって、前記カプセル3Lは、前記カプセル本体42の外表面42aと前記螺旋構造部44との間の距離を螺旋全長に亘って均一に保持することができる。
【0134】
本実施例によれば、前記カプセル本体42の外表面42aから離間している前記螺旋構造部44の螺旋形状を螺旋全長に亘って均一に保持できるため、安定した推進力が得られ体腔内管路の深部方向への挿入性が向上する。
【実施例8】
【0135】
図28ないし図31は本発明の実施例8に係り、図28は本発明の実施例8のカプセル型医療装置の構成を示す概略図、図29は図28のカプセル型医療装置の第1変形例を示す概略図、図30は図28のカプセル型医療装置の第2変形例を示す概略図、図31は図28のカプセル型医療装置の第3変形例を示す概略図である。
実施例8は、螺旋外径変化手段として螺旋構造部44の先端44aと後端44bとのいずれか一方の固定位置を長手軸方向に移動させることにより螺旋外径を変化するよう構成する。それ以外の構成は上記実施例1とほぼ同様なので、同じ構成には同じ符号を付して説明を省略する。
【0136】
図28に示すように実施例8のカプセル3Mは、カプセル本体42の中央部後端とカプセル後端部43との間に細径部128が形成されている。この細径部128には、移動部材129が前記カプセル本体42の長手軸方向に進退動可能に設けられている。前記移動部材129には、カプセル本体42に先端44aが固定された螺旋構造部44の後端44bが固定されている。この移動部材129は、前記細径部128に配設されたコイルスプリング130により前記細径部128の端部側に付勢されている。
【0137】
すなわち、前記移動部材129は、前記螺旋構造部44の螺旋外径が広がる方向に付勢している前記コイルスプリング130の付勢力に抗して前記螺旋構造部44の螺旋外径を小さくする方向に移動するようになっている。
【0138】
これにより、前記カプセル3Mは、前記螺旋構造部44と管腔内壁との接触部分に発生する推進力の反力、及び前記螺旋構造部44と管腔内壁との接触部分で生じる径方向への圧縮力によって前記螺旋構造部44に外力が加わると、移動部材129が前記コイルスプリング130の付勢力に抗して長手軸方向に移動し、螺旋構造部44の螺旋外径が小さくなる。したがって、本実施例によれば、腸等の管腔径が小さくなっている部分でも、前記外力によって容易に螺旋構造部44の螺旋外径が変化するため、体腔内管路の深部方向への挿入性が向上する。
【0139】
さらに、カプセルは、上記実施例7と同様に前記柱状弾性体126を設けて構成してもよい。
図29に示すようにカプセル3Nは、前記螺旋構造部44に前記柱状弾性体126を複数箇所設けるとともに、これらの柱状弾性体126が長手軸方向に摺動可能な軸方向溝131を前記カプセル外表面42aに複数個所形成している。
【0140】
これにより、前記カプセル3Nは、前記柱状弾性体126が前記螺旋構造部44の螺旋外径の変化に伴って曲がりつつ、前記軸方向溝131を摺動して螺旋形状の変化を吸収することができる。したがって、前記カプセル3Nは、前記カプセル本体42の外表面42aと前記螺旋構造部44との間の距離を螺旋全長に亘って均一に保持することができる。
【0141】
したがって、本変形例によれば、前記実施例8と同様な効果を得ることに加え、実施例7と同様に前記螺旋構造部44の螺旋形状を螺旋全長に亘って均一に保持できるため、安定した推進力が得られ体腔内管路の深部方向への挿入性が向上する。
【0142】
また、カプセルは、前記カプセル後端部43を長手軸方向に進退自在に構成してもよい。
図30に示すようにカプセル3Pは、カプセル後端部43を進退自在に構成してこのカプセル後端部43に固定されている前記螺旋構造部44の後端44bの固定位置を進退動するように構成している。さらに具体的に説明すると、前記カプセル3Pは、前記細径部128が長手軸方向に進退自在に前記カプセル本体42に内蔵されている。
【0143】
前記細径部128には、ロッド132a先端が連結されている。このロッド132aは、アクチュエータ132に噛合している。前記アクチュエータ132は、前記ロッド132aを噛合する図示しないピニオンを有し、このピニオンを図示しないモータにより回転させて前記ロッド132aを軸方向に進退させる軸方向移動アクチュエータである。このアクチュエータ132は、図示しない制御回路に接続されており、この制御回路は、前記制御装置4から送信される制御信号に基づいて前記アクチュエータ132を制御駆動するようになっている。
【0144】
前記アクチュエータ132は、前記ロッド132aを進退動することにより前記細径部128を長手軸方向に進退動し、結果として前記カプセル後端部43を長手軸方向に進退させるようになっている。
【0145】
これにより、カプセル3Pは、前記実施例8と同様な効果を得ることに加え、螺旋構造部44の螺旋外径が大きいときには、カプセル全長が短くなるので方向転換等し易くなるとともに確実な螺旋外径の制御が可能となり、体腔内管路の深部方向への挿入性が向上する。
【0146】
なお、カプセルは、カプセル本体42の全長を変えずに、前記螺旋構造部44の後端44bの固定位置を長手軸方向に移動可能に構成してもよい。
図31に示すようにカプセル3Qは、螺旋構造部44の後端44bの固定位置を長手軸方向に進退させる移動部133を設けて構成している。前記移動部133は、前記螺旋構造部44の後端44bを固定配置している固定部133aを長手軸方向に進退動させるようになっている。前記固定部133aは、前記カプセル本体42の外表面42aに露出されている。前記移動部133は、前記固定部133aを長手軸方向に進退動させる機構が前記カプセル本体42内部に設けられている。
【0147】
さらに具体的に説明すると、前記移動部133は、前記固定部133aの背面側を収納する収納室133bを有し、この収納室133bの端部側に前記固定部133aを付勢する板ばね133cが配設されている。前記板ばね133cは、前記螺旋構造部44の螺旋外径が広がる方向に付勢している。すなわち、前記移動部133は、前記板ばね133cの付勢力に抗して前記螺旋構造部44の螺旋外径を小さくする方向に前記固定部133aを移動させるようになっている。
【0148】
また、カプセル3Qは、前記カプセル3Nと同様に前記螺旋構造部44に前記柱状弾性体126を複数箇所設けるとともに、これらの柱状弾性体126が長手軸方向に摺動可能な軸方向溝131Qを前記カプセル外表面42aに複数個所形成している。なお、前記軸方向溝131Qは、前記軸方向溝131に比べてカプセル本体42の外表面42aの全長に亘って形成され、当該長手軸方向に位置する前記柱状弾性体126を複数摺動可能となっている。
【0149】
これにより、前記カプセル3Qは、前記柱状弾性体126が前記螺旋構造部44の螺旋外径の変化に伴って曲がりつつ、前記軸方向溝131を摺動して螺旋形状の変化を吸収することができる。したがって、前記カプセル3Qは、前記カプセル本体42の外表面42aと前記螺旋構造部44との間の距離を螺旋全長に亘って均一に保持することができる。
【0150】
したがって、本変形例によれば、前記実施例8と同様な効果を得ることに加え、実施例7と同様に前記螺旋構造部44の螺旋形状を螺旋全長に亘って均一に保持できるため、安定した推進力が得られ体腔内管路の深部方向への挿入性が向上する。
【実施例9】
【0151】
図32ないし図37は本発明の実施例9に係り、図32は本発明の実施例9のカプセル型医療装置の構成を示す概略図、図33は図32の螺旋構造部の螺旋外径変化を示すカプセル型医療装置の正面図、図34は断面二次モーメントをカプセル本体の長手軸方向に最小となるように形成した柱状弾性体の動作を示す説明図、図35は図32のカプセル型医療装置の第1変形例を示す概略図、図36は図32のカプセル型医療装置の第2変形例を示す概略図、図37は図32のカプセル型医療装置の第3変形例を示す概略図、図38は図37の螺旋構造部の螺旋外径変化を示すカプセル型医療装置の正面図である。
【0152】
実施例9は、螺旋外径変化手段として螺旋構造部44とカプセル本体42の外表面42aとの間を前記柱状弾性体126により連結して構成する。それ以外の構成は上記実施例1とほぼ同様なので、同じ構成には同じ符号を付して説明を省略する。
【0153】
図32に示すように実施例9のカプセル3Rは、前記螺旋構造部44が切断され、隣り合う螺旋同士の間隔を所定距離離間して前記カプセル本体42の外表面42aに複数配置されて構成している。前記複数の螺旋構造部44は、それぞれカプセル本体42の外表面42aとの間を前記柱状弾性体126により連結されている。
【0154】
さらに具体的に説明すると、前記複数の螺旋構造部44は、それぞれの両端部に前記柱状弾性体126を設けている。これら柱状弾性体126は、前記カプセル本体42の外表面42aに接着等により固定され、当該螺旋構造部44を前記カプセル本体42の外表面42aに支持固定している。なお、前記柱状弾性体126は、前記螺旋構造部44の螺旋方向に曲がり易いように断面二次モーメントを螺旋方向に最小となるように形成されている。
【0155】
このような構成のカプセル3Rは、前記螺旋構造部44と管腔内壁との接触部分に発生する推進力の反力、及び前記螺旋構造部44と管腔内壁との接触部分で生じる径方向への圧縮力によって前記螺旋構造部44に外力が加わると、図33に示すように前記柱状弾性体126が螺旋方向に広がるように曲がることにより、前記螺旋構造部44の螺旋外径が小さくなる。前記螺旋構造部44は、隣り合う螺旋同士の間隔を所定距離離間して前記カプセル本体42の外表面42aに配置されているが、螺旋外径が小さくなることにより螺旋全長の短縮を吸収するようになっている。
【0156】
これにより、カプセル3Rは、上記実施例3及び実施例6と同様な効果を得ることに加え、前記柱状弾性体126が螺旋方向に曲がるので、前記螺旋構造部44が径方向にのみ変化することにより体腔内管路の深部方向への挿入性が向上する。
【0157】
なお、カプセル3Rは、前記柱状弾性体126が前記カプセル本体42の長手軸方向に倒れるように形成して前記螺旋構造部44の螺旋外径を変化するように構成してもよい。 図34に示すように前記柱状弾性体126は、断面二次モーメントが前記カプセル本体42の長手軸方向に対して最小となるように形成している。
【0158】
これにより、カプセル3Rは、前記螺旋構造部44と管腔内壁との接触部分に発生する推進力の反力、及び前記螺旋構造部44と管腔内壁との接触部分で生じる径方向への圧縮力によって前記螺旋構造部44に外力が加わると、前記柱状弾性体126が前記カプセル本体42の長手軸方向に倒れることにより、前記螺旋構造部44の螺旋外径が小さくなる。したがって、カプセル3Rは、前記螺旋構造部44が前記カプセル本体42の長手軸方向に倒れるので、腸等の細い管腔に挿入していく螺旋外径変化が起こり易くなり、体腔内管路の深部方向への挿入性が向上する。
【0159】
また、カプセルは、外周方向に隣り合う螺旋構造部44を連結して構成してもよい。
図35に示すようにカプセル3Sは、外周方向に隣り合う螺旋構造部44を弾性部材134により連結して構成している。これにより、前記カプセル3Sは、螺旋構造部44の繋ぎ目がなだらかに形成されるので、カプセル本体42の回転時の抵抗が小さくなり、効率よく回転、推進が可能となり、よって体腔内管路の深部方向への挿入性が向上する。
【0160】
また、カプセルは、前記複数の螺旋構造部44をカプセル本体42の長手軸方向に互い違いに配置して構成してもよい。
図36に示すようにカプセル3Tは、複数の螺旋構造部44が重なるようにカプセル本体42の長手軸方向に互い違いに配置して構成している。
【0161】
これにより、前記カプセル3Tは、複数の螺旋構造部44がカプセル本体42の長手軸方向に互い違いに位置しているので、螺旋外径が小さくなったとき、長手軸方向に隣り合う螺旋構造部44が重なるようにして螺旋全長の短縮を吸収することができる。また、前記カプセル3Tは、略連続的に螺旋構造部44を設けることができるので、効率的に推進力が得られ、体腔内管路の深部方向への挿入性が向上する。
【0162】
また、カプセルは、カプセル本体42の長手軸方向に略アーチ状に設けた複数の弾性部材に前記複数の螺旋構造部44を外周方向に互い違いに連結して構成してもよい。
図37に示すようにカプセル3Uは、カプセル本体42の長手軸方向に複数の弾性部材135を略アーチ状に設け、これらのアーチ状弾性部材135に前記複数の螺旋構造部44を外周方向に互い違いに連結して構成している。
【0163】
さらに具体的に説明すると、カプセル3Uは、2本一組のアーチ状弾性部材135をカプセル本体42の長手軸方向にカプセル先端側と後端側とに両端を固定して複数設けている。カプセル3Uは、前記2本一組のアーチ状弾性部材135に対して前記複数の螺旋構造部44が重なるようにカプセル本体42の長手軸方向に互い違いに連結している。
【0164】
このような構成のカプセル3Uは、前記螺旋構造部44と管腔内壁との接触部分に発生する推進力の反力、及び前記螺旋構造部44と管腔内壁との接触部分で生じる径方向への圧縮力によって前記螺旋構造部44に外力が加わると、図38に示すように隣り合うアーチ状弾性部材135が外周方向に撓んで広がることにより、前記螺旋構造部44の螺旋外径が小さくなる。
【0165】
これにより、前記カプセル3Uは、上記実施例9と同様な効果を得ることに加え、前記アーチ状弾性部材135を前記柱状弾性体126に比べて長く形成しているので柔らかい構造が製作可能である。したがって、前記カプセル3Uは、腸壁からの小さな力でも敏感に螺旋構造部44の螺旋外径を変化させることができるので、体腔内管路の深部方向への挿入性が向上する。
【実施例10】
【0166】
図39ないし図41は本発明の実施例10に係り、図39は本発明の実施例10のカプセル型医療装置の構成を示す概略図、図40は図39の螺旋構造部の螺旋外径変化を示すカプセル型医療装置の正面図、図41は図39のカプセル型医療装置の第2変形例を示す概略図である。
実施例10は、螺旋外径変化手段として複数の弾性部材により螺旋構造部44を形成して構成する。それ以外の構成は上記実施例1とほぼ同様なので、同じ構成には同じ符号を付して説明を省略する。
【0167】
図39に示すように実施例10のカプセル3Vは、複数の弾性部材136により螺旋構造部44を形成して構成している。さらに具体的に説明すると、前記複数の弾性部材136は、前記カプセル本体42の外表面42aに両端を接着等に固定して外周方向に互い違いに重なるように配置される。
【0168】
このような構成のカプセル3Vは、前記螺旋構造部44を形成している複数の弾性部材136と管腔内壁との接触部分に発生する推進力の反力、及び前記複数の弾性部材136と管腔内壁との接触部分で生じる径方向への圧縮力によって前記複数の弾性部材136に外力が加わると、図40に示すように隣り合う弾性部材136が外周方向に撓んで広がることにより、螺旋外径が小さくなる。このとき、カプセル3Vは、長手軸方向に隣り合う弾性部材136が重なるようにして螺旋全長の短縮を吸収することができる。
【0169】
これにより、前記カプセル3Vは、上記実施例9と同様な効果を得ることに加え、略連続的に螺旋構造部44を設けることができるので、効率的に推進力が得られる。また、カプセル3Vは、前記複数の弾性部材136を前記柱状弾性体126に比べて長く形成しているので柔らかい構造が製作可能であり、腸壁からの小さな力でも敏感に螺旋外径を変化させることができる。したがって、前記カプセル3Vは、体腔内管路の深部方向への挿入性が向上する。
【0170】
なお、カプセルは、前記複数の弾性部材136をそれぞれ独立に設けて構成してもよい。
図41に示すようにカプセル3Wは、前記複数の弾性部材136を離間してそれぞれ独立に前記カプセル本体42の外表面42aに配置して構成している。
【0171】
これにより、カプセル3Wは、前記実施例10と同様な効果を得ることに加え、実施例7と同様に前記螺旋構造部44の螺旋形状を螺旋全長に亘って均一に保持できるため、安定した推進力が得られ体腔内管路の深部方向への挿入性が向上する。
【実施例11】
【0172】
図42及び図43は本発明の実施例11に係り、図42は本発明の実施例11のカプセル型医療装置の構成を示す概略図、図43はカプセル本体の外周方向に断面二次モーメントが小さくなる形状に形成した柱状弾性体の動作を示すカプセル型医療装置の正面図である。
実施例11は、複数の柱状弾性体を螺旋状に連続的に配置して螺旋構造部44を形成して構成する。それ以外の構成は上記実施例1とほぼ同様なので、同じ構成には同じ符号を付して説明を省略する。
【0173】
図42に示すように実施例11のカプセル3Xは、複数の柱状弾性体137をカプセル本体42の外表面42aに連続的に螺旋状に配置固定して螺旋構造部44を形成して構成している。前記柱状弾性体137は、球状に形成した頭部137aを有して管腔内壁に滑らかに接触可能に構成されている。なお、前記頭部137aは、管腔内壁に滑らかに接触可能であれば球状でなくともよく、半球状、円錐上等に形成してもよい。
【0174】
また、前記柱状弾性体137は、それぞれ互いに独立して前記カプセル本体42の外表面42aに配置しているので、柔らかく、均一な螺旋構造部44が形成可能である。これにより、前記カプセル3Xは、推進力の均一性が保たれ、体腔内管路の深部方向への挿入性が向上する。
【0175】
なお、前記柱状弾性体137は、断面二次モーメントが前記カプセル本体42の長手軸方向に対して最小となるように形成している。これにより、前記カプセル3Xは、前記柱状弾性体137と管腔内壁との接触部分に発生する推進力の反力、及び前記柱状弾性体137と管腔内壁との接触部分で生じる径方向への圧縮力によって前記柱状弾性体137に外力が加わると、前記カプセル本体42の長手軸方向に撓むことにより、前記螺旋構造部44の螺旋外径が小さくなる。
【0176】
したがって、本実施例によれば、腸等の管腔径が小さくなっている部分(閉じた部分)でも、前記外力によって容易に螺旋構造部44の螺旋外径が変化するため、体腔内管路の深部方向への挿入性が向上する。
【0177】
なお、前記柱状弾性体137は、螺旋方向に断面二次モーメントが小さくなる形状に形成してもよい。これにより、前記カプセル3Xは、前記柱状弾性体137が螺旋方向に撓むので、螺旋外径変化時に螺旋構造部44に垂直方向への変化がない。したがって、前記カプセル3Xは、螺旋構造部44の外径変化が効率的に可能となり、推進性が向上する。
【0178】
また、前記柱状弾性体137は、前記カプセル本体42の外周方向に断面二次モーメントが小さくなる形状に形成してもよい。これにより、前記カプセル3Xは、図43に示すように前記柱状弾性体137がカプセル本体42の外周方向に撓むので、カプセル本体42の回転動作方向に螺旋構造部44が変化する。したがって、前記カプセル3Xは、螺旋外径変化がカプセル本体42の回転動作の抵抗にならないので、効率的な回転動作ができ、挿入性が向上する。
【実施例12】
【0179】
図44ないし図48は本発明の実施例12に係り、図44は本発明の実施例12のカプセル型医療装置の構成を示す概略図、図45は図44のカプセル型医療装置の第1変形例を示す概略図、図46は図44のカプセル型医療装置の第2変形例を示す概略図、図47は図44のカプセル型医療装置の第3変形例を示す概略図、図48は図47の螺旋構造部の螺旋外径変化を示すカプセル型医療装置の正面図である。
【0180】
上記実施例9〜11は螺旋外径変化手段として柱状弾性体または弾性部材を用いて構成しているが、実施例12は螺旋外径変化手段として上記実施例9〜11の構成に加え、前記柱状弾性体または弾性部材を機械的に傾けさせるように構成する。それ以外の構成は上記実施例9〜11とほぼ同様なので、同じ構成には同じ符号を付して説明を省略する。
【0181】
なお、実施例12は、上記実施例11の柱状弾性体137を代表例として説明する。
【0182】
図44に示すように実施例12のカプセル3Yは、カプセル内部構造体138と、このカプセル内部構造体138を収納するカプセルシース139と有して構成している。前記カプセル内部構造体138には、上記実施例1で説明したマグネット8、対物光学系21、撮像素子22、照明素子23等が収納されている。前記カプセル内部構造体138は、外周面に前記柱状弾性体137を複数固定配置して螺旋構造部44を設けている。
【0183】
前記カプセルシース139は、前記先端カバー41と、前記カプセル内部構造体138を収納する収納部139aと、前記カプセル後端部43とを有して構成している。前記カプセルシース139は、前記収納部139aに前記カプセル内部構造体138を収納している。また、前記カプセルシース139は、前記複数の柱状弾性体137を貫通孔139bを介してシース外表面139cに突出させている。この場合、前記シース外表面は、カプセル本体42の外表面42aとなる。
【0184】
前記カプセルシース139は、前記カプセル内部構造体138を長手軸方向に進退動させるためのアクチュエータ140が前記カプセル後端部43に収納配置されている。
【0185】
前記アクチュエータ140は、ロッド140aを噛合している。前記アクチュエータ140は、ロッド140aを進退動させる。この進退動されるロッド140aの先端には、前記カプセル内部構造体138が連結されている。
【0186】
前記アクチュエータ140は、前記ロッド140aを進退動させることにより前記カプセルシース139に対して前記カプセル内部構造体138を長手軸方向に相対的に進退動させる。すると、前記カプセルシース139は、前記貫通孔139bの壁面により前記柱状弾性体137を押圧してこの柱状弾性体137をカプセル長手軸方向に傾けさせる。
【0187】
これにより、前記カプセル3Yは、前記柱状弾性体137により形成される螺旋構造部44の螺旋外径を小さくすることができ、上記実施例11と同様な効果を得ることができる。また、前記カプセル3Yは、前記貫通孔139b分の小さな動きで螺旋構造部44の螺旋外径を変化させることができるので、前記アクチュエータ140によるロッド140aのストロークを小さくして小型化できる。
【0188】
なお、前記カプセル3Yは、上記実施例11で説明した柱状弾性体137を用いて説明しているが、上記実施例9〜10までの柱状弾性体または弾性部材を用いて構成しても同様な効果を得る。
【0189】
また、カプセルは、前記アクチュエータ140の代わりにコイルスプリング及びSMAワイヤを用いて構成してもよい。
図45に示すようにカプセル3Zは、前記アクチュエータ140の代わりにコイルスプリング141及びSMAワイヤ142を前記カプセル後端部43に収納配置して構成している。
【0190】
前記SMAワイヤ142の一端は、前記カプセル内部構造体138に連結され、他端は前記カプセル後端部43の内壁に固定されている。また、前記コイルスプリング141は、前記カプセル内部構造体138をカプセル先端側に常時付勢している。
【0191】
前記SMAワイヤ142は、図示しないスイッチがオンして通電されることにより、前記コイルスプリング141の付勢力に抗して縮み、前記カプセル内部構造体138をカプセル後端側へ退かせるようになっている。これにより、前記SMAワイヤ142は、通電により前記柱状弾性体137を傾けさせてこの柱状弾性体137により形成される螺旋構造部44の螺旋外径を小さくすることができる。
【0192】
したがって、カプセル3Zは、前記柱状弾性体137により形成される螺旋構造部44の螺旋外径を小さくすることができ、上記実施例12と同様な効果を得ることができる。
【0193】
また、図46に示すように前記カプセル3Zは、前記貫通孔139bの位置を変更することにより、前記柱状弾性体137をカプセル先端側に傾けさせた状態から垂直に立たせた状態すなわち、螺旋構造部44の螺旋外径が小さくなる状態から大きくなる状態にすることも可能である。
【0194】
また、カプセルは、前記アクチュエータ140の代わりにモータを用いて構成してもよい。
図47に示すようにカプセル3αは、前記アクチュエータ140の代わりにモータ143を前記カプセル後端部43に収納配置して構成している。
【0195】
前記モータ143は、駆動軸143aが前記カプセル内部構造体138に接続され、このカプセル内部構造体138を回転自在に所定角度回転させるようになっている。なお、このモータ143は、パルスモータである。
【0196】
これにより、前記カプセル3αは、前記モータ143を所定角度回転することにより、前記カプセルシース139に対して前記カプセル内部構造体138が相対的に所定角度回転される。したがって、前記カプセル3αは、図48に示すように前記貫通孔139bの壁面により前記柱状弾性体137を押圧してこの柱状弾性体137をカプセル外周方向に傾けさせ、この柱状弾性体137により形成される螺旋構造部44の螺旋外径を小さくすることができる。この結果、前記カプセル3αは、上記実施例12と同様な効果を得ることができる。
【0197】
なお、上述した各実施例等を部分的に組み合わせる等して構成される実施例も本発明に属する。
【産業上の利用可能性】
【0198】
本発明の被検体内挿入装置は、螺旋構造部の螺旋形状を適正に維持して安定した推進力が得られるようにしたので、被検体内で検査、治療又は処置などの医療行為に好適に利用することができる。
【図面の簡単な説明】
【0199】
【図1】本発明の実施例1を備えたカプセル医療装置誘導システムの概略の構成を示す全体構成図である。
【図2】図1のより詳細な構成を示すブロック図である。
【図3】磁場発生装置の構成を示す概略図である。
【図4】カプセル型医療装置の外観を示す側面図である。
【図5】カプセル型医療装置の構成を示す概略図である。
【図6】カプセル後端部の回転に伴って螺旋構造部の螺旋外径が変化される様子を示す説明図である。
【図7】図5のカプセル型医療装置の第1変形例を示す概略図である。
【図8】図5のカプセル型医療装置の第2変形例を示す概略図である。
【図9】本発明の実施例2のカプセル型医療装置を示す説明図である。
【図10】図9のカプセル型医療装置の構成を示す概略図である。
【図11】本発明の実施例3のカプセル型医療装置を示す説明図である。
【図12】バルーンの膨張・収縮に伴って螺旋構造部の螺旋外径が変化される様子を示す説明図である。
【図13】バルーンが膨張したときのカプセル型医療装置を示す説明図である。
【図14】図11のカプセル型医療装置の第1変形例を示す概略図である。
【図15】図11のカプセル型医療装置の第2変形例を示す概略図である。
【図16】図11のカプセル型医療装置の第3変形例を示す概略図である。
【図17】本発明の実施例4のカプセル型医療装置を示す説明図である。
【図18】図17のカプセル型医療装置の構成を示す概略図である。
【図19】図17のカプセル型医療装置の変形例を示す説明図である。
【図20】図19のカプセル型医療装置の構成を示す概略図である。
【図21】本発明の実施例5の内視鏡挿入部を示す説明図である。
【図22】図21の内視鏡挿入部の構成を示す概略図である。
【図23】本発明の実施例6のカプセル型医療装置の構成を示す概略図である。
【図24】図23のカプセル型医療装置の第1変形例を示す概略図である。
【図25】図23のカプセル型医療装置の第2変形例を示す概略図である。
【図26】本発明の実施例7のカプセル型医療装置の構成を示す概略図である。
【図27】図26の螺旋構造部及び弾性体の動作を示す概略図である。
【図28】本発明の実施例8のカプセル型医療装置の構成を示す概略図である。
【図29】図28のカプセル型医療装置の第1変形例を示す概略図である。
【図30】図28のカプセル型医療装置の第2変形例を示す概略図である。
【図31】図28のカプセル型医療装置の第3変形例を示す概略図である。
【図32】本発明の実施例9のカプセル型医療装置の構成を示す概略図である。
【図33】図32の螺旋構造部の螺旋外径変化を示すカプセル型医療装置の正面図である。
【図34】断面二次モーメントをカプセル本体の長手軸方向に最小となるように形成した柱状弾性体の動作を示す説明図である。
【図35】図32のカプセル型医療装置の第1変形例を示す概略図である。
【図36】図32のカプセル型医療装置の第2変形例を示す概略図である。
【図37】図32のカプセル型医療装置の第3変形例を示す概略図である。
【図38】図37の螺旋構造部の螺旋外径変化を示すカプセル型医療装置の正面図である。
【図39】本発明の実施例10のカプセル型医療装置の構成を示す概略図である。
【図40】図39の螺旋構造部の螺旋外径変化を示すカプセル型医療装置の正面図である。
【図41】図39のカプセル型医療装置の第2変形例を示す概略図である。
【図42】本発明の実施例11のカプセル型医療装置の構成を示す概略図である。
【図43】カプセル本体の外周方向に断面二次モーメントが小さくなる形状に形成した柱状弾性体の動作を示すカプセル型医療装置の正面図である。
【図44】本発明の実施例12のカプセル型医療装置の構成を示す概略図である。
【図45】図44のカプセル型医療装置の第1変形例を示す概略図である。
【図46】図44のカプセル型医療装置の第2変形例を示す概略図である。
【図47】図44のカプセル型医療装置の第3変形例を示す概略図である。
【図48】図47の螺旋構造部の螺旋外径変化を示すカプセル型医療装置の正面図である。
【符号の説明】
【0200】
1 カプセル型医療装置誘導システム
3 カプセル型医療装置
4 カプセル制御装置
5 磁場発生装置
6 交流電源装置
8 マグネット
22 撮像素子
23 照明素子
30 モータ
41 先端カバー
42 カプセル本体
43 カプセル後端部
44 螺旋構造部
45 ベアリング
【技術分野】
【0001】
本発明は、体腔内に挿入して回転しながら推進する被検体内挿入装置に関する。
【背景技術】
【0002】
体腔内に挿入して回転しながら推進する被検体内挿入装置の従来例としては、例えば特公昭60−56488号公報に記載されている。この特公昭60−56488号公報には、内視鏡先端部に設けた回動部材の外表面に螺旋構造部として膨張・収縮自在な膜部材を形成した体腔内誘導装置が記載されている。この体腔内誘導装置は、前記回転部材の回転中心に対して斜走する向きに前記膜部材が巻回され、前記回転部材を回転することにより前記膜部材が管腔内壁との間でねじ作用により推進力を得て前記内視鏡先端部を推進させる。
【特許文献1】特公昭60−56488号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、前記体腔内誘導装置は、前記膜部材の膨張圧が高くなると、隣り合う螺旋の間隔が狭くなり、螺旋と螺旋との間に腸壁などの管腔内壁が入り込み難くなる。このため、前記体腔内誘導装置は、前記膜部材と管腔内壁との接触状態が悪くなり、前記ねじ作用による推進力が著しく低下してしまう。一方、前記体腔内誘導装置は、前記膜部材の膨張圧が低くなると螺旋形状を維持することが困難となり、前記ねじ作用による推進力が得られ難くなる。
【0004】
本発明は上述した点に鑑みてなされたもので、螺旋構造部の螺旋形状を適正に維持して安定した推進力が得られるようにした被検体内挿入装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
上記課題を解決するために本発明の一態様による被検体内挿入装置は、被検体内に挿入する挿入部本体と、前記挿入部本体を回転させる回転機構と、前記回転機構による前記挿入部本体の回転運動を推進力に変換する、前記挿入部本体の外表面に対して径方向に分離して設けた螺旋構造部と、前記挿入部本体の外表面に対して径方向に分離して設けた前記螺旋構造部の螺旋外径を変化させる螺旋外径変化手段と、を具備している。
【発明の効果】
【0006】
本発明の被検体内挿入装置は、螺旋構造部の螺旋形状を適正に維持して安定した推進力を得ることができるという効果がある。
【発明を実施するための最良の形態】
【0007】
以下、図面を参照して本発明の実施例を説明する。
【実施例1】
【0008】
図1ないし図8は本発明の実施例1に係り、図1は本発明の実施例1を備えたカプセル医療装置誘導システムの概略の構成を示す全体構成図、図2は図1のより詳細な構成を示すブロック図、図3は磁場発生装置の構成を示す概略図、図4はカプセル型医療装置の外観を示す側面図、図5はカプセル型医療装置の構成を示す概略図、図6はカプセル後端部の回転に伴って螺旋構造部の螺旋外径が変化される様子を示す説明図、図7は図5のカプセル型医療装置の第1変形例を示す概略図、図8は図5のカプセル型医療装置の第2変形例を示す概略図である。
【0009】
図1、図2及び図3に示すように被検体内挿入装置としてのカプセル型医療装置誘導システム(以下、カプセル誘導システムと略記)1は、挿入部本体としてのカプセル型医療装置(以下、単にカプセルと略記)3と、カプセル制御装置(以下、単に制御装置と略記)4と、磁場発生装置5と、交流電源装置6とを有している。
【0010】
前記カプセル3は、(図1に示す)患者2の体腔内に挿入され、体腔内を検査するためのカプセル形状に形成される。前記制御装置4は、患者2の外部に配置され、前記カプセル3と電波を送受信して、このカプセル3の動作を制御したり、カプセル3から送信される情報を受信するパソコン等で構成される。前記磁場発生装置5は、前記カプセル3に印加する回転磁場の方向等を制御してカプセル3を推進させたい方向に誘導する(図1では模式的に示す)。前記交流電源装置6は、前記磁場発生装置5に回転する磁場(より広義には電磁場)を発生させるための交流電源を供給する。
【0011】
図2に示すように前記磁場発生装置5は、例えば3つの電磁石5a,5b,5cで形成されている。この磁場発生装置5は、前記交流電源装置6から供給される交流電源を前記制御装置4により制御されることにより、3軸方向に回転磁場を発生できるようにしている。なお、図3では、磁場発生装置5を3軸方向に形成した(中空の立方体形状の)3軸ヘルムホルツコイルで模式的に示している。
【0012】
前記カプセル3は、前記磁場発生装置5により形成される回転磁場に応答して力が作用する磁場応答部であるマグネット8を有している。このマグネット8は、例えばカプセル3の長手中心軸上でこの中心軸と直交する方向と、マグネット8の磁化方向が一致するように配置され、図示しない接着剤等で固定されている。これにより、前記カプセル3は、前記磁場発生装置5で発生される回転磁場がマグネット8に作用し、このマグネット8が受ける回転力によりカプセル3が回転するようになっている。すなわち、前記マグネット8は、回転機構を構成している。
【0013】
なお、前記マグネット8は、ネオジウム磁石、サマリウムコバルト磁石、フェライト磁石、鉄・クロム・コバルト磁石、プラチナ磁石、アルニコ(AlNiCo)磁石などの永久磁石である。ネオジウム磁石、サマリウムコバルト磁石などの希土類系磁石は、磁力が強く、カプセルに内蔵する磁石を小さくできるメリットがある。一方、フェライト磁石は、安価であるというメリットがある。更に、プラチナ磁石は、耐腐食性が優れている。
【0014】
また、このマグネット8は、永久磁石に限らず、コイルで形成されるものでも良い。この場合、マグネット8は、内蔵電池等の電源からの電流によってコイルに磁力を発生させても良いし、内蔵コンデンサなどに一次的に蓄積した電力でコイルを磁石化させる方法でも良い。更に、マグネット8は、内蔵電源でなく、内部コイルによって発電させ、この電力をコンデンサに蓄えて別のコイルを磁石化させる方法でも良い。この場合、マグネット8は、内蔵電池の容量制限が無くなり、長時間の稼動が可能になる。なお、発電用のコイルと磁石用のコイルとは、兼用しても良い。
【0015】
前記磁場発生装置5は、患者2の周囲に配置される(図2参照)。前記交流電源装置6は、前記制御装置4により交流電源を制御され、前記マグネット8に対して前記カプセル3を推進する方向に前記磁場発生装置5に回転磁場を形成させる。これにより、患者2の体腔内管路内に挿入されたカプセル3は、円滑にかつ効率良く推進(誘導)させることができるようにしている。前記磁場発生装置5による回転磁場の方向は、前記制御装置4に接続された操作入力装置9を操作することにより、制御できる。
【0016】
図1に示すように前記制御装置4は、パソコン本体11と、キーボード12と、モニタ13と、体外アンテナ14と、操作入力装置9とを有する。前記パソコン本体11は、前記カプセル3及び前記磁場発生装置5(の交流電源)を制御する機能を備えている。前記キーボード12は、前記パソコン本体11に接続され、コマンド、データ等の入力を行う。前記モニタ13は、前記パソコン本体11に接続され、画像等を表示する。前記体外アンテナ14は、前記パソコン本体11に接続され、カプセル3を制御する制御信号の発信及びカプセル3からの信号を受信する。前記操作入力装置9は、前記パソコン本体11に接続され、回転磁場の方向等を入力操作する。
【0017】
前記制御装置4は、図2に示すようにCPU15を内蔵している。このCPU15は、前記カプセル3及び前記磁場発生装置5を制御する制御信号をキーボード12及び操作入力装置9からの入力或いはパソコン本体11内のハードディスク16(図2参照)等に格納された制御プログラムに基づいて生成する。
【0018】
前記磁場発生装置5を制御する制御信号は、パソコン本体11から接続ケーブルを介して交流電源装置6へ伝達される。その制御信号に基づいて、前記磁場発生装置5は、回転磁場を発生する。その回転磁場によりカプセル3は、磁場発生装置5で発生された回転磁場により内部のマグネット8に対して磁気的に作用され回転されることで、後述の螺旋構造部により推進するための動力を得られるようにしている。
【0019】
前記カプセル3を制御する制御信号は、パソコン本体11内の発振回路を経て所定の周波数の搬送波で変調され、体外アンテナ14から電波として発振されるようになっている。前記カプセル3は、後述のアンテナ27で電波を受信し、制御信号が復調され、各構成回路等へ出力するようになっている。また、前記制御装置4は、カプセル3の無線アンテナ27から送信される映像信号等の情報(データ)信号を体外アンテナ14で受信して、モニタ13上に表示するようになっている。
【0020】
図2に示すようにカプセル3内には、前記マグネット8の他に、光学像を結ぶ対物光学系21と、その結像位置に配置される撮像素子22と、対物光学系21の周囲に配置された照明素子23とを有している。また、カプセル3内には、信号処理回路24と、メモリ25と、無線回路26と、アンテナ27と、カプセル制御回路28と、バッテリ29とが収納されている。
【0021】
前記信号処理回路24は、前記撮像素子22で撮像された信号に対する信号処理を行う。前記メモリ25は、前記信号処理回路24により生成されたデジタル映像信号を一時記憶する。前記無線回路26は、前記メモリ25から読み出した映像信号を高周波信号で変調して無線送信する信号に変換したり、制御装置4から送信される制御信号を復調等する。前記アンテナ27は、前記体外アンテナ14と電波の送受信を行う。前記カプセル制御回路28は、前記信号処理回路24等のカプセル3を制御する。前記バッテリ29は、前記信号処理回路24等カプセル3内部の電気系に動作用の電源を供給する。なお、前記カプセル3内には、後述するように螺旋外径変化手段を構成しているモータ30が設けられている。
【0022】
また、前記制御装置4を構成するパソコン本体11は、無線回路31と、データ処理回路32と、CPU15と、ハードディスク16とを有している。無線回路31は、前記体外アンテナ14に接続され、(カプセル3側の)無線回路26と無線通信を行う。データ処理回路32は、前記無線回路31と接続され、カプセル3から送られた画像データに対する画像表示等のデータ処理等を行う。CPU15は、前記データ処理回路32や前記交流電源装置6等を制御する制御手段である。ハードディスク16は、プログラムやデータ等を格納する。
【0023】
前記CPU15には、回転磁場の方向を設定する操作をする操作入力装置9やコマンド及びデータ入力を行うキーボード12が接続されている。前記データ処理回路32には、モニタ13が接続されている。このモニタ13には、前記撮像素子22で撮像され、無線回路26、31を経てデータ処理回路32により処理された画像等が表示される。また、このデータ処理回路32は、カプセル3が回転されながら画像を撮像するので、モニタ13に表示される際の画像の向きを一定の方向に補正する処理を行い、術者が見易い画像を表示できるように画像処理を行う。
【0024】
図4に示すように前記カプセル3は、略半球形状の先端カバー41と、略円筒状のカプセル本体42と、略半球状のカプセル後端部43とを有して構成されている。前記先端カバー41は、透明部材により形成されており、前記カプセル本体42に気密に接続されている。前記カプセル本体42は、前記先端カバー41と一体に気密に構成されている。前記カプセル後端部43は、前記カプセル本体42に対して所定角度回転自在に構成され、気密に構成されている。
【0025】
前記カプセル本体42の外表面42aには、管腔内壁に接触して回転することにより回転運動を推進力に変換する推進発生用の螺旋構造部44が設けられている。この螺旋構造部44は、前記カプセル本体42の外表面42aに対して径方向に分離して螺旋状に巻回されている。
【0026】
前記螺旋構造部44は、その先端側がカプセル本体42の円筒外周面を経て前記先端カバー41まで延出され、その先端44aは前記先端カバー41の途中部分、具体的には対物レンズ21による視野角内に入らない位置に固定されている。また、この螺旋構造部44の後端44bは、前記カプセル後端部43の境界付近まで延出され固定されている。なお、前記螺旋構造部44は、一方の螺旋構造部44の中間位置にさらに螺旋構造部44を設けて二重(2条)に形成されている。
【0027】
図5に示すように前記カプセル本体42と前記カプセル後端部43とは、ベアリング45を介在させて回転自在に接続されている。前記カプセル本体42には、前記カプセル後端部43を回転自在に所定角度回転させるモータ30が設けられている。なお、このモータ30は、例えばパルスモータである。このモータ30の駆動軸30aは、前記ベアリング45内を挿通して前記カプセル後端部43に接続されている。したがって、カプセル3は、前記モータ30を所定角度回転することにより、前記カプセル本体42に対して前記カプセル後端部43が所定角度回転される。
【0028】
これにより、前記カプセル3は、体腔内管路の管路径に応じて図6に示すように前記カプセル後端部43が所定角度回転されることにより、前記螺旋構造部44の先端44aの固定位置に対して前記螺旋構造部44の後端44bの固定位置が所定角度回転する。これにより、前記カプセル3は、外周方向に移動し、前記螺旋構造部44の螺旋外径を変化させることができる。なお、前記モータ30は、図示しないモータ制御回路に接続されており、このモータ制御回路は、前記制御装置4から送信される制御信号に基づいて前記モータ30を制御駆動するようになっている。
【0029】
次にカプセル誘導システム1による動作を以下に説明する。
術者は、図1に示すように、患者2の例えば十二指腸51側或いは小腸側等の体腔内管路内を観察する必要がある場合、カプセル3を患者2に飲み込ませる。なお、カプセル3は、予め飲み込み易いように螺旋構造部44の螺旋外径が最小径となるように設定される。
【0030】
また、術者は、患者2に飲み込ませる直前に、カプセル3の図示しないスイッチをオンにし、バッテリ29の電力が照明素子23等伝達されるようにする。同時に、術者は、磁場発生装置5を起動(オン)し、この磁場発生装置5により発生する回転磁場により体腔内管路内においてカプセル3が目的部位側に到達し易いよう磁気的に制御する。
【0031】
上述したようにカプセル3は、磁場発生装置5により発生される回転磁場にマグネット8が作用すると、このマグネット8が受ける作用によりカプセル本体42が回転する。
カプセル3は、前記カプセル本体42の回転によって、体腔内管路において前記螺旋構造部44と管腔内壁との接触部分に雄ねじが雌ねじに対して移動するような、カプセル本体42を前進させる推進力が発生して前進する。また、カプセル3は、回転磁場の回転に伴い、マグネット8の回転平面と回転磁場の回転平面とが一致するようにカプセル本体42が回転しながら進行方向(向き)が変更される。このとき、カプセル3は、カプセル本体42が偏芯運動等の無駄な動きをすることなく、体腔内管路内をスムーズに目的部位側に向けて推進することができる。
【0032】
カプセル3は、口腔52から食道53を通過し、胃54内部へ到達する。術者は、胃54内部を観察する必要がある場合、制御装置4の例えばキーボード12から観察開始のコマンドに対応するキー入力を行う。すると、このキー入力による制御信号は、制御装置4の体外アンテナ14を経て電波で放射されてカプセル3側に送信される。
【0033】
カプセル3は、アンテナ27で受信した信号により、動作開始の信号を検出し、照明素子23、撮像素子22、信号処理回路24等が駆動状態となる。カプセル3は、照明素子23からの照明光が体腔内管路の目的部位を照明する。照明された目的部位の反射光は、対物レンズ21を介して光学像として取り込まれ撮像素子22に結像されて光電変換される。撮像素子22からの撮像信号は、信号処理回路24によりA/D変換されてデジタル信号処理された後、圧縮処理される。圧縮処理されたデジタル信号は、メモリ25に格納された後、無線回路26で変調され、アンテナ27から電波で放射される。
【0034】
この電波は、制御装置4の体外アンテナ14で受信され、パソコン本体11内の無線回路31で復調される。復調された信号は、さらにA/D変換されてデータ処理回路32によりデジタル映像信号に変換され、データ処理回路32のメモリやハードディスク16に格納されると共に、所定の速度で読み出されてモニタ13に出力される。モニタ13には、カプセル3で取得した光学画像がカラー表示される。
【0035】
術者は、このモニタ画像を観察することにより、患者2の胃54内部等を観察することができる。術者は、操作入力装置9のジョイスティックなどの操作手段を用いて、胃54内全域の観察が行えるように外部磁力のかけ方を容易にコントロールできる。術者は、胃54内の観察が終了した後、カプセル3に対して磁場発生装置5で発生される回転磁場の向きを制御することにより、磁気的に誘導して胃54から十二指腸51側に移動させることができる。
【0036】
術者は、十二指腸51においても、その管腔の向きに進行させるように回転磁場の向きを制御することにより円滑にカプセル3を推進させることができる。また、術者は、小腸のように屈曲した管路内を進行させる場合においても螺旋状突起44がカプセル本体42の球面状の端部付近にまで形成してあるので、カプセル3を屈曲した管路内でも円滑に進行させることができる。
【0037】
このとき、術者は、モニタ画像により体腔内管路の管路径に応じて操作入力装置9やキーボード12を操作してカプセル3の螺旋構造部44を所望の螺旋外径となるように指示することができ、所望の推進力を得ることができる。さらに具体的に説明すると、術者は、螺旋構造部44の螺旋外径よりも体腔内管路の管路径が大きくてこの管腔内壁と螺旋構造部44との接触状態が良好でなく、十分な推進力を得られない場合、螺旋構造部44の螺旋外径を大きくするよう指示する。
【0038】
術者は、制御装置4の例えばキーボード12からコマンドに対応するキー入力を行う。このキー入力による制御信号は、制御装置4の体外アンテナ14を経て電波で放射されてカプセル3側に送信される。カプセル3は、アンテナ27で受信した信号からモータ制御信号を検出し、このモータ制御信号に基づいてモータ制御回路がモータ30を制御駆動する。カプセル3は、螺旋構造部44の螺旋外径を大きくするようモータ30が所定角度回転してカプセル本体42に対してカプセル後端部43が所定角度回転する。
【0039】
このカプセル後端部43の回転に伴って、螺旋構造部44は、先端44aの固定位置に対して後端44bの固定位置が近づいて螺旋外径が大きくなる。これにより、カプセル3は、体腔内管路の管路径が大きいとき、管腔内壁と螺旋構造部44との接触状態が良好になり、十分な推進力を得ることができる。
【0040】
その後、螺旋構造部44の螺旋外径が体腔内管路の管路径以上となる場合、術者は、螺旋構造部44の螺旋外径を小さくするよう指示する。上述したように術者のキー入力による制御信号は、制御装置4の体外アンテナ14を経て電波で放射されてカプセル3側に送信され、カプセル3は、アンテナ27で受信した信号から検出したモータ制御信号に基づいてモータ制御回路がモータ30を制御駆動する。
【0041】
カプセル3は、螺旋構造部44の螺旋外径を小さくするようモータ30が所定角度逆回転してカプセル本体42に対してカプセル後端部43が所定角度逆回転する。このカプセル後端部43の逆回転に伴って、螺旋構造部44は、先端44aの固定位置に対して後端44bの固定位置が遠ざかり、螺旋外径を小さくする。
【0042】
これにより、カプセル3は、体腔内管路の管路径が小さいとき、螺旋構造部44の螺旋外径を小さくすることができるので、管腔内壁と螺旋構造部44との接触状態が良好になり、十分な推進力を得ることができる。したがって、カプセル3は、体腔内管路の管路径に応じて螺旋構造部44の螺旋外径を変化させることができる。
【0043】
このように本実施例によれば、体腔内管路の管路径に応じて螺旋構造部44の螺旋外径を変化させることができるので、螺旋構造部44の螺旋形状を適正に維持して安定した推進力が得られる。また、本実施例のカプセル3は、螺旋構造部44の先端44aと後端44bとの相対位置を変化させることで螺旋外径を変化するようにしているので、構造が簡単で小型化できる。また、本実施例のカプセル3は、カプセル後端部43による周方向の回転動作で螺旋構造部44の螺旋外径を変化させるので、螺旋外径の変化が推進力を得るための回転動作の邪魔にならず、体腔内管路の深部方向への挿入性が向上する。
【0044】
なお、前記カプセル3は、前記螺旋構造部44の先端44aの固定位置に対して後端44bの固定位置を変化させるように構成しているが、本発明はこれに限定されず、前記螺旋構造部44の先端44aの固定位置を変化させるように構成してもよいし、また、先端44a及び後端44bの両方とも固定位置を変化させるように構成してもよい。
【0045】
なお、カプセルは、モータ30の代わりにマグネット8を用いてカプセル後端部43を回転するようにしてもよい。図7に示すようにカプセル3Bは、カプセル本体42とベアリング45によって回転自在に構成されているカプセル後端部43に回転機構としてのマグネット8を配置固定している。
【0046】
このカプセル3Bは、前記マグネット8の回転によりカプセル本体42に対してカプセル後端部43を回転させるとともに、カプセル本体42とカプセル後端部43とを一体的に回転させて体腔内管路への推進力を得るようにしている。
【0047】
さらに具体的に説明すると、前記カプセル3Bは、前記磁場発生装置5による回転磁場に前記マグネット8が作用して常に螺旋構造部44の螺旋外径を大きくする方向にカプセル後端部43が回転するようになっている。前記カプセル3Bは、螺旋構造部44と管腔内壁とが接触すると、この管腔内壁に接触している螺旋構造部44の負荷に応じてカプセル後端部43が所定角度回転した後停止し、以降このカプセル後端部43とカプセル本体42とが一体的に回転し始めて体腔内管路への推進力が生じる。
【0048】
これにより、前記カプセル3Bは、管腔内壁との接触状態に応じて螺旋構造部44が最適な螺旋外径となり、螺旋構造部44の螺旋形状を適正に維持して安定した推進力が得られる。本変形例によれば、回転機構としてのマグネット8により、螺旋構造部44を最適な螺旋外径にすることができるとともに、推進力も得られるので構造が単純化され、小型化できる。また、本変形例のカプセル3Bは、回転時に管腔内壁と螺旋構造部44とが接触する方向に常に力が加わるので、安定した推進力が得られ、体腔内管路の深部方向への挿入性が向上する。
【0049】
また、カプセルは、渦巻ばねを用いてカプセル後端部43を所定角度回転するようにしてもよい。図8に示すようにカプセル3Cは、カプセル本体42とカプセル後端部43とを回転機構として渦巻ばね46によって回転自在に接続している。
【0050】
前記渦巻ばね46は、一端が前記カプセル本体42に固定され他端が前記カプセル後端部43に固定されており、前記螺旋構造部44の螺旋外径が常時大きくなる方向に付勢力を有する。これにより、カプセル3Cは、前記渦巻ばね46の付勢力に抗して前記螺旋構造部44が管腔内壁と接触して所定角度回転することにより、管腔内壁との接触状態に応じて螺旋構造部44が最適な螺旋外径となり、螺旋構造部44の螺旋形状を適正に維持して安定した推進力が得られる。
【0051】
本変形例によれば、体腔内管路の管路径に応じて自動的に螺旋構造部44の螺旋外径の径変化が可能となる。また、本変形例のカプセル3Cは、螺旋構造部44の螺旋外径の制御のためにエネルギを必要とせず、構造もシンプルなため、小型化できる。また、本変形例のカプセル3Cは、常に螺旋外径を広げる方向に力が発生するため、管腔内壁と螺旋構造部44との接触状態が保たれ、安定した推進力が得られ、体腔内管路の深部方向への挿入性が向上する。
【0052】
尚、本実施例は、体腔内を撮像するカプセル型内視鏡として機能するカプセルに本発明を適用して構成しているが、本発明はこれに限定されず、生体組織を採取する採取手段を有する組織採取型カプセル、薬剤を放出する薬剤放出型カプセル、生体組織を焼灼する焼治療型カプセルに本発明を適用しても構わない。
【実施例2】
【0053】
図9及び図10は本発明の実施例2に係り、図9は本発明の実施例2のカプセル型医療装置を示す説明図、図10は図9のカプセル型医療装置の構成を示す概略図である。
上記実施例1は螺旋外径変化手段として螺旋構造部44の先端44aと後端44bとのいずれか一方の固定位置をカプセル3の外周方向に移動させることにより螺旋外径を変化するように構成しているが、実施例2は螺旋外径変化手段としてカプセル本体42の外表面42aから離間している螺旋構造部44を膨張・収縮することで螺旋外径を変化させるように構成する。それ以外の構成は上記実施例1とほぼ同様なので、同じ構成には同じ符号を付して説明を省略する。
【0054】
図9及び図10に示すように実施例2のカプセル3Dは、形状記憶合金(以下、SMAと略記)コイル47を用いて螺旋構造部44を構成している。なお、本実施例2のカプセル3Dは、上記実施例1のカプセルと異なり、カプセル後端部43が回転することなくカプセル本体42と一体的に構成されている。
【0055】
前記螺旋構造部44は、弾性を有する伸縮自在な外装チューブ48内を前記SMAコイル47が挿通している。前記外装チューブ48は、先端48aが前記先端カバー41の途中部分、具体的には対物レンズ21による視野角内に入らない位置に固定され、後端48bが前記カプセル後端部43の境界付近まで延出され固定されている。
【0056】
前記SMAコイル47は、その両端が前記カプセル本体42内部に延出して前記バッテリ29とスイッチ29bとにより閉回路を構成している。前記スイッチ29bは、例えば前記制御装置4から送信される制御信号によりオンオフし、バッテリ29からの電力を前記SMAコイル47に供給または供給停止するようになっている。
【0057】
これにより、前記螺旋構造部44は、前記スイッチ29bがオンして前記バッテリ29から前記SMAコイル47に通電し、前記SMAコイル47が縮むとともに前記外装チューブ49が縮むことにより、結果として螺旋構造部44の全長が縮み螺旋外径が小さくなる。一方、前記螺旋構造部44は、通電を停止すると、前記外装チューブ48の弾性力により螺旋構造部44の全長が元に戻り(伸び)、螺旋外径が大きくなる。すなわち、SMAコイル47及び外装チューブ49、スイッチ29b、バッテリ29は、螺旋外径変化手段を構成している。
【0058】
したがって、前記カプセル3Dは、カプセル本体42の外表面42aから離間している螺旋構造部44を螺旋方向に膨張・収縮することで螺旋外径を変化させることができる。本実施例によれば、上記実施例1と同様な効果を得ることに加え、螺旋構造部44を螺旋方向に膨張・収縮することで螺旋外径を変化させることができ、螺旋形状に歪みを発生させること無く確実な螺旋外径の径変化を行える。
【実施例3】
【0059】
図11ないし図16は本発明の実施例3に係り、図11は本発明の実施例3のカプセル型医療装置を示す説明図、図12はバルーンの膨張・収縮に伴って螺旋構造部の螺旋外径が変化される様子を示す説明図、図13はバルーンが膨張したときのカプセル型医療装置を示す説明図、図14は図11のカプセル型医療装置の第1変形例を示す概略図、図15は図11のカプセル型医療装置の第2変形例を示す概略図、図16は図11のカプセル型医療装置の第3変形例を示す概略図である。
【0060】
上記実施例1は螺旋外径変化手段として螺旋構造部44の先端44aと後端44bとのいずれか一方の固定位置をカプセル3の外周方向に移動させることにより螺旋外径を変化するように構成しているが、実施例3はカプセル本体42と螺旋構造部との間にバルーンを設け、このバルーンを膨張・収縮することにより螺旋構造部の螺旋外径を変化させるように構成する。それ以外の構成は上記実施例1とほぼ同様なので、同じ構成には同じ符号を付して説明を省略する。
【0061】
図11ないし図13に示すように実施例3のカプセル3Eは、カプセル本体42を被覆するバルーン(弾性膜)61を設け、このバルーン61の外周面上に例えば、エラスティックチューブ、ゴム等の伸縮可能な弾性体または樹脂等のチューブ62により形成される螺旋構造部44Eを設けている。
【0062】
前記カプセル本体42の内部には、前記バルーン61に対して気体または液体等の流体を供給吸引するためのバルーン膨張・収縮手段としてのシリンダ部63が設けられている。前記バルーン61は、前記カプセル本体42に形成された貫通孔64を介して接続管路65に連通し、この接続管路65は前記シリンダ部63のシリンダ壁に形成された貫通孔67に連通している。
【0063】
前記シリンダ部63は、ピストンロッドとしてのSMAワイヤ68aの一端にピストン68bが設けられ、他端はシリンダ内壁に固定されている。また、前記シリンダ部63は、前記バルーン61を膨張させる方向に前記ピストン68bを常時付勢するコイルスプリング68cが前記SMAワイヤ68aの配置側に設けられている。
【0064】
前記SMAワイヤ68aは、上記実施例2のSMAコイル47と同様に図示しないバッテリ及びスイッチにより閉回路を構成し、例えば前記制御装置4から送信される制御信号によりスイッチがオンオフし、バッテリからの電力が供給または供給停止されるようになっている。前記SMAワイヤ68aは、スイッチがオンしてバッテリから通電されると、前記コイルスプリング68cの付勢力に抗して縮むことにより、前記バルーン61を収縮する方向にピストン68bをシリンダ内壁に摺動させるようになっている。
【0065】
したがって、前記シリンダ部63は、前記螺旋構造部44Eの螺旋外径が常に大きくなる方向に前記コイルスプリング68cが付勢して前記ピストン68bを摺動させて流体を供給し、前記バルーン61を膨張させる。一方、前記シリンダ部63は、前記SMAワイヤ68aが通電されることにより、このSMAワイヤ68aが前記コイルスプリング68cの付勢力に抗して縮み、前記螺旋構造部44Eの螺旋外径が小さくなる方向に前記ピストン68bをシリンダ内壁に摺動させて流体を吸引し、前記バルーン61を収縮させる。すなわち、シリンダ部63は、螺旋外径変化手段を構成している。
【0066】
これにより、カプセル3Eは、カプセル本体42と螺旋構造部44Eとの間にバルーン61を設け、このバルーン61を膨張・収縮することにより、螺旋構造部44Eの螺旋外径を変化させることができる。なお、前記カプセル3Eは、飲み込み易くするために予め糖衣等の生体適合性のある水溶性物質により前記バルーン61が固められて小型化されてもよい。
【0067】
本実施例によれば、上記実施例1と同様な効果を得ることに加え、カプセル本体42と螺旋構造部44Eとの間にバルーン61を設け、このバルーン61を膨張・収縮することにより螺旋構造部44Eの螺旋外径を変化させることができ、螺旋形状に歪みを発生させること無く確実な螺旋外径の径変化を行える。
【0068】
なお、カプセルは、SMAワイヤ68aの代わりにアクチュエータを用いてシリンダ部を構成してもよい。図14に示すようにカプセル3Fに設けられているシリンダ部63Fは、ピストンロッド69aを進退動させるためのアクチュエータ69を有して構成している。
【0069】
前記ピストンロッド69aは、シリンダ内壁の貫通孔69bを挿通して前記アクチュエータ69に噛合している。前記アクチュエータ69は、前記ピストンロッド69aを噛合する図示しないピニオンを有し、このピニオンを図示しないモータにより回転させて前記ピストンロッド69aを軸方向に進退させる軸方向移動アクチュエータである。このアクチュエータ69は、図示しない制御回路に接続されており、この制御回路は、前記制御装置4から送信される制御信号に基づいて前記アクチュエータ69を制御駆動するようになっている。
【0070】
したがって、前記シリンダ部63Fは、前記アクチュエータ69により前記ピストンロッド69aを軸方向に前進させることにより、前記螺旋構造部44Eの螺旋外径が大きくなる方向に前記ピストン68bを摺動させて流体を供給し、前記バルーン61を膨張させる。一方、前記シリンダ部63Fは、前記アクチュエータ69により前記ピストンロッド69aを軸方向に後退させることにより、前記螺旋構造部44Eの螺旋外径が小さくなる方向に前記ピストン68bをシリンダ内壁に摺動させて流体を吸引し、前記バルーン61を収縮させる。これにより、カプセル3Fは、上記実施例3と同様に螺旋構造部44Eの螺旋外径を変化させることができる。
【0071】
また、カプセルは、コイルスプリング68c及びピストン68bのみでシリンダ部を構成してもよい。図15に示すようにカプセル3Gに設けられているシリンダ部63Gは、コイルスプリング68c及びピストン68bのみで構成している。
【0072】
前記コイルスプリング68cは、前記バルーン61を膨張させる方向に前記ピストン68bを常時付勢している。これにより、カプセル3Gは、前記コイルスプリング68cの付勢力に抗して前記螺旋構造部44Eが管腔内壁と接触して外力がかかることにより、管腔内壁との接触状態に応じて螺旋構造部44Eが最適な螺旋外径となり、螺旋構造部44Eの螺旋形状を適正に維持して安定した推進力が得られる。
【0073】
本変形例によれば、体腔内管路の管路径に応じて自動的に螺旋構造部44Eの螺旋外径の径変化が可能となる。また、本変形例のカプセル3Gは、螺旋構造部44Eの螺旋外径の制御のためにエネルギを必要とせず、構造もシンプルなため、小型化できる。また、本変形例のカプセル3Gは、常に螺旋外径を広げる方向に力が発生するため、管腔内壁と螺旋構造部44Eとの接触状態が保たれ、安定した推進力が得られ、体腔内管路の深部方向への挿入性が向上する。
【0074】
また、カプセルは、発泡剤を用いてバルーン61を膨張させるように構成してもよい。図16に示すようにカプセル3Hは、カプセル本体42内にバルーン膨張・収縮手段として発泡剤収納部71と、ポンプ72と、水槽73とを有している。
【0075】
前記発泡剤収納部71は、収納室71a内に収納した複数の発泡剤タブレット74をコイルスプリング75により収納室71aの壁面に付勢するように構成している。この収納室71aには、前記接続管路65に連通する貫通孔72aと、前記ポンプ72との接続管路76に連通する貫通孔71cとが形成されている。なお、前記貫通孔71cは、前記コイルスプリング75の付勢により最先端に位置する発泡剤タブレット74に前記ポンプ72から送水された前記水槽73の水がかかる位置に形成されている。
【0076】
前記ポンプ72は、前記水槽73との接続管路77を介して前記水槽73に貯留されている水を吸引して前記貫通孔71cを介して前記発泡剤収納部71の前記発泡剤タブレット74に送水するようになっている。なお、前記ポンプ72は、図示しないポンプ制御回路に接続されており、このポンプ制御回路は、前記制御装置4から送信される制御信号に基づいて前記ポンプ72を制御駆動するようになっている。
【0077】
これにより、前記発泡剤収納部71は、前記ポンプ72から前記水槽73の水を送水され、この送水された水により最先端の発泡剤タブレット74を反応させて気化させることにより、前記バルーン61を膨張させる。なお、前記発泡剤タブレット74は、主成分が例えば炭酸水素ナトリウム、酒石酸であり、反応することにより二酸化炭素が発生する。
【0078】
前記バルーン61は、図示しない圧力開放弁が設けられており、圧力が所定値を超えると自動的にガスを開放するようにしている。なお、圧力開放弁は、圧力制御弁でもよく、これにより能動的に前記バルーン61の膨張量を制御できるようにしてもよい。さらにこのバルーン61を膨張させる場合は、前記コイルスプリング75により付勢されて次に最先端となる発泡剤タブレット74を反応させる。
【0079】
これにより、カプセル3Hは、上記実施例3と同様に螺旋構造部44Eの螺旋外径を変化させることができる。本変形例によれば、前記バルーン61を膨張させる圧力を化学的に発生することができるので、バルーン61を膨張させるためのエネルギが少なくてすみ、省エネ、バッテリサイズ縮小が可能である。なお、カプセル3Hは、前記水槽73をカプセル本体42内に設けず、被検体内の体液をカプセル本体42内に吸引し、発泡剤タブレット74を反応させてもよい。
【実施例4】
【0080】
図17ないし図20は本発明の実施例4に係り、図17は本発明の実施例4のカプセル型医療装置を示す説明図、図18は図17のカプセル型医療装置の構成を示す概略図、図19は図17のカプセル型医療装置の変形例を示す説明図、図20は図19のカプセル型医療装置の構成を示す概略図である。
【0081】
上記実施例1〜3は患者の周囲に設けた磁場発生装置により発生させた回転磁場によりカプセル内に設けたマグネットを作用させてカプセルを回転させるように構成しているが、実施例4はカプセルにモータを設けてこのカプセルが自発的に回転するように構成する。それ以外の構成は上記実施例1とほぼ同様なので、同じ構成には同じ符号を付して説明を省略する。
【0082】
図17及び図18に示すように実施例4のカプセル100は、カプセル本体101と、このカプセル本体101を回転させる回転ベース部102とを有して構成している。
前記カプセル本体101には、図示しないが上記実施例1と同様な対物光学系21、撮像素子22、及び照明素子23の他に、信号処理回路24、メモリ25、無線回路26、アンテナ27、カプセル制御回路28及びバッテリ29等の内蔵物が収納されている。また、前記カプセル本体101は、上記実施例3と同様にカプセル本体101を被覆するバルーン61を設け、このバルーン61の外周面上に弾性体のチューブ62により形成される螺旋構造部44Eを設けている。前記カプセル本体101は、上記実施例3またはその変形例と同様に前記バルーン61を膨張・収縮させるバルーン膨張・収縮手段を備えている。また、前記カプセル100は、飲み込み易くするために予め糖衣等の生体適合性のある水溶性物質により前記バルーン61が固められて小型化されてもよい。
【0083】
前記回転ベース部102は、前記カプセル本体101を回転させるための回転機構であるモータ103を配置している。このモータ103は、例えば回転モータである。前記モータ103のモータ軸103aは、前記カプセル本体101の後端部に嵌合固定され、前記回転ベース部102に対して前記カプセル本体101を相対的に回転させる。
【0084】
これにより、前記カプセル本体101は、前記モータ103の回転力により前記回転ベース部102に対し相対的に回転し、この回転を前記螺旋構造部44Eが推力(推進力)に変換して螺旋軸方向(螺旋軸104の方向)に推進力を発生する。なお、前記モータ103は、前記回転ベース部102に設けた第2バッテリ105から電源電力が供給される。
【0085】
また、前記回転ベース部102には、外表面に長手軸と平行に複数の溝部106が形成されている。これにより、前記カプセル100は、前記回転ベース部102が推進を妨げずに管腔内壁に対し回転することを防止している。なお、前記回転ベース部102には、前記モータ103に画像を角度補正するための図示しない角度検出手段を設けてもよい。この場合、カプセル100からは、角度検出手段からの角度情報を映像信号等の情報(データ)信号に関係付けて体外に送信する。
【0086】
このように構成されているカプセル100は、患者が飲み込むことにより体腔内管路に挿入される。カプセル100は、前記第2バッテリ105からの電源電力を供給されて前記モータ103が駆動し、前記カプセル本体101が回転する。前記カプセル本体101は、前記モータ103のモータ軸103aから回転力を伝達され、このモータ103の回転力により前記回転ベース部102に対し相対的に回転する。このとき、上述したように前記回転ベース部102は、外表面に形成した溝部106により推進を妨げずに管腔内壁に対して回転することを防止している。
【0087】
前記カプセル100は、前記カプセル本体101の回転によって、螺旋構造部44Eと管腔内壁との接触部分に雄ねじが雌ねじに対して移動するような、カプセル本体101を前進させる推進力が発生する。これにより、カプセル100は、前記カプセル本体101が螺旋軸方向(螺旋軸104の方向)に推進力を発生し、前進することができる。
【0088】
本実施例によれば、上記実施例1と同様な効果を得ることに加え、カプセル100が回転機構としてモータ103を内蔵しているので自走でき、磁場発生装置5及び交流電源装置6等の磁気誘導のような体外装置が不要であり、システム全体を小型化できる。
【0089】
なお、本実施例のカプセル100は、上記実施例3と同様にカプセル本体101と螺旋構造部44Eとの間にバルーン61を設け、このバルーン61を膨張・収縮することにより螺旋構造部44Eの螺旋外径を変化させるように構成しているが、本発明はこれに限定されず、上記実施例1または実施例2と同様な機構を設けて螺旋構造部44の螺旋外径を変化させるように構成しても構わない。
【0090】
なお、カプセルは、前記回転ベース部102を中心に前記カプセル本体101を2つ設けて構成してもよい。図19及び図20に示すように、カプセル100Bは、回転ベース部102を中心に前記カプセル本体101を2つ設けて構成されている。
【0091】
更に具体的に説明すると、前記カプセル100Bは、回転ベース部102と、この回転ベース部102に取り付けられた第1モータ106a,第2モータ106bにより前記回転ベース部102に対して相対的に回転する前方側カプセル本体101a及び後方側カプセル本体101bとを有して構成されている。これら前方側カプセル本体101aと後方側カプセル本体101bとは、前記バルーン61に形成される前記螺旋構造部44Eが互いに逆向きとなるように形成されている。尚、前方とは、撮像素子22の向いている方向と定義する。
【0092】
前記回転ベース部102には、前記前方側カプセル本体101aを回転させる第1モータ106aと、前記後方側カプセル本体101bを回転させる第2モータ106bと、これら第1モータ106a,第2モータ106bを駆動するための電源電力を供給する第2バッテリ105が設けられている。
これにより、前記カプセル100Bは、一方のカプセル本体101(前方側カプセル本体101a又は後方側カプセル本体101b)が管腔内壁に接触せずに推進できない場合でも、他方のカプセル本体101(後方側カプセル本体101b又は前方側カプセル本体101a)が管腔内壁に接触するよう補助して推進し続けることができる。
【0093】
なお、前記カプセル100Bは、前記前方側カプセル本体101aと前記後方側カプセル本体101bとに設けた螺旋構造部44Eが互いに逆向きに巻回されているが、本発明はこれに限定されず、同じ向きに巻回してもよい。この場合、前記前方側カプセル本体101aと前記後方側カプセル本体101bとは同じ推進方向となるように回転する。
【実施例5】
【0094】
図21及び図22は本発明の実施例5に係り、図21は本発明の実施例5の内視鏡挿入部を示す説明図、図22は図21の内視鏡挿入部の構成を示す概略図である。
上記実施例1〜4は被検体内挿入装置として体腔内管路を独立に移動可能なカプセルに本発明を適用して構成しているが、実施例5は被検体内挿入装置としてカプセル状部を先端に有する内視鏡挿入部に本発明を適用して構成する。それ以外の構成は上記実施例1とほぼ同様なので、同じ構成には同じ符号を付して説明を省略する。
【0095】
図21及び図22に示すように実施例5の被検体内挿入装置としての内視鏡挿入部110は、体腔内管路に挿入する細長で可撓性を有する挿入チューブ111の先端にカプセル状部112を設けて構成している。
【0096】
前記カプセル状部112は、上記実施例3と同様にカプセル状部112の外表面112aにバルーン61を設け、このバルーン61の外周面上に弾性体のチューブ62により形成される螺旋構造部44Eを設けている。前記カプセル状部112は、飲み込み易くするために予め糖衣等の生体適合性のある水溶性物質により前記バルーン61が固められて小型化されてもよい。前記カプセル状部112は、先端側容器113と後端側容器114とが接着剤で接着固定されて一体的に構成されている。前記先端側容器113には、図示しないが上記実施例1と同様な対物光学系21、撮像素子22、及び照明素子23等の内蔵物が収納されている。
【0097】
前記後端側容器114には、前記挿入チューブ111の先端側が取り付けられており、この挿入チューブ111に対してベアリング115にて回転自在となっている。尚、前記後端側容器114と前記挿入チューブ111との間には、Oリング116にて気密に構成されている。これにより、前記カプセル本体112は、前記挿入チューブ111に対して前記先端側容器113と後端側容器114とが一体的に回転自在となっている。
【0098】
前記挿入チューブ111の先端側には、前記先端側容器113と後端側容器114とを一体的に回転させるモータ117が取り付けられている。前記先端側容器113には、前記モータ117を収納するモータ収納室118が設けられている。前記モータ117のモータ軸117aは、前記モータ収納室118の収納壁に嵌合固定されている。これにより、前記モータ117は、前記挿入チューブ111に対して前記カプセル状部112を回転させることができる。
【0099】
前記先端側容器113には、前記モータ収納室118から外周表面へ向けて貫通孔119が形成され、前記モータ収納室118を介して前記バルーン61へエアを供給可能である。前記挿入チューブ111には、前記バルーン61へエアを供給するための管路120が形成されている。なお、この管路には、撮像素子22から得た映像信号を伝達する信号線、前記モータ117の電源線等の信号線が配設される。
【0100】
前記挿入チューブ111の後端側は、図示しない制御装置に接続されている。この制御装置は、前記モータ117を制御駆動するモータ制御回路、映像信号等を信号処理するデータ処理回路の他に、前記バルーン61にエアを供給するコンプレッサを設けている。
【0101】
このように構成されている内視鏡挿入部110は、体腔内管路に挿入される。内視鏡挿入部110は、制御装置からの電源電力を供給されて前記モータ117が駆動され、前記カプセル状部112が回転する。前記内視鏡挿入部110は、前記カプセル状部112の回転によって、前記螺旋構造部44Eと管腔内壁との接触部分に雄ねじが雌ねじに対して移動するような、カプセル状部112を前進させる推進力が発生して前進する。
【0102】
このとき、術者は、螺旋構造部44Eの螺旋外径よりも体腔内管路の管路径が大きくてこの管腔内壁と螺旋構造部44Eとの接触状態が良好でなく、十分な推進力を得られない場合、螺旋構造部44Eの螺旋外径を大きくするよう制御装置を操作する。制御装置は、コンプレッサを駆動して前記内視鏡挿入部110にエアを供給する。
【0103】
前記内視鏡挿入部110は、前記挿入チューブ111の管路120からエアを供給され、このエアは前記カプセル状部112のモータ収納室118から貫通孔119を介して前記バルーン61に導かれる。前記バルーン61は、膨張して前記螺旋構造部44Eの螺旋外径を大きくする。これにより、内視鏡挿入部110は、螺旋構造部44Eの螺旋外径を大きくすることができるので、管腔内壁と螺旋構造部44Eとの接触状態を良好にして、十分な推進力を得ることができる。
【0104】
その後、逆に螺旋構造部44Eの螺旋外径が体腔内管路の管路径以上となる場合、術者は、螺旋構造部44Eの螺旋外径を小さくするよう制御装置を操作する。制御装置は、コンプレッサを駆動して前記内視鏡挿入部110からエアを吸引する。この場合、前記内視鏡挿入部110は、上記したエア供給と逆の経路により、前記バルーン61からエアが吸引される。前記バルーン61は、収縮して前記螺旋構造部44Eの螺旋外径を小さくする。
【0105】
これにより、内視鏡挿入部110は、螺旋構造部44Eの螺旋外径を小さくすることができるので、管腔内壁と螺旋構造部44Eとの接触状態を良好にして、十分な推進力を得ることができる。したがって、内視鏡挿入部110は、体腔内管路の管路径に応じて螺旋構造部44Eの螺旋外径を変化させることができる。
【0106】
このように本実施例によれば、体腔内管路の管路径に応じて螺旋構造部44Eの螺旋外径を変化させることができるので、螺旋構造部44Eの螺旋形状を適正に維持して安定した推進力が得られる。また、本実施例の内視鏡挿入部110は、挿入チューブ111からエアを供給するので、カプセル状部112にポンプ等を設ける必要がなく、カプセル状部112を小型化できる。さらに、本実施例の内視鏡挿入部は、バルーン61に対してエア供給排出が手元側の制御装置により直接操作指示できるので、操作性がよい。なお、前記内視鏡挿入部110は、前記カプセル状部112が前記挿入チューブ111から着脱自在に取り付け可能に構成してもよい。
【0107】
また、本実施例の内視鏡挿入部110は、上記実施例3と同様にカプセル状部112と螺旋構造部44Eとの間にバルーン61を設け、このバルーン61を膨張・収縮することにより螺旋構造部44Eの螺旋外径を変化させるように構成しているが、本発明はこれに限定されず、上記実施例1または実施例2と同様な機構を設けて螺旋構造部44の螺旋外径を変化させるように構成しても構わない。
【0108】
さらに、前記内視鏡挿入部110は、先端部のカプセル状部112にバルーン61を設け、このバルーン61上に螺旋構造部44Eを形成して構成しているが、本発明はこれに限定されず、挿入チューブ111の複数個所にバルーン61を設け、このバルーン61上に螺旋構造部44Eを形成して構成してもよい。
【0109】
また、本実施例は、内視鏡挿入部110に本発明を適用して構成しているが、本発明はこれに限定されず、カプセル状部を先端に有するプローブ、内視鏡挿入部を体腔内管路の深部へ導く挿入補助具等に本発明を適用して構成しても構わない。
【実施例6】
【0110】
図23ないし図25は本発明の実施例6に係り、図23は本発明の実施例6のカプセル型医療装置の構成を示す概略図、図24は図23のカプセル型医療装置の第1変形例を示す概略図、図25は図23のカプセル型医療装置の第2変形例を示す概略図である。
【0111】
上記実施例1は螺旋外径変化手段として螺旋構造部44の先端44aと後端44bとのいずれか一方の固定位置をカプセル3の外周方向に移動させることにより螺旋外径を変化するように構成しているが、実施例6は螺旋外径変化手段として前記カプセル本体42の外表面42aから離間している螺旋構造部44の長さを螺旋方向に変更することで螺旋外径を変化させるように構成する。それ以外の構成は上記実施例1とほぼ同様なので、同じ構成には同じ符号を付して説明を省略する。
【0112】
図23に示すように実施例6のカプセル3Iは、カプセル後端部43に前記螺旋構造部44の後端44bが固定されている。前記螺旋構造部44は、先端44aが前記カプセル本体42に形成された貫通路42cを挿通して前記カプセル本体42内部に配設されたアクチュエータ121に接続されている。前記カプセル本体42の貫通路42cには、水密を確保するためのOリング122が設けられている。
【0113】
前記アクチュエータ121は、前記螺旋構造部44を巻き取り、送り出すために回転運動を行うロータリーアクチュエータである。このアクチュエータ121は、図示しない制御回路に接続されている。この制御回路は、前記制御装置4から送信される制御信号に基づいて前記アクチュエータ121を制御駆動するようになっている。
【0114】
前記アクチュエータ121は、正逆自在に回転することにより前記螺旋構造部44の先端44aを巻き取り、送り出して、前記カプセル本体42の外表面42aから離間している前記螺旋構造部44の長さを変更することで螺旋外径を変化させるようになっている。さらに具体的に説明すると、前記アクチュエータ121は、前記螺旋構造部44の先端44aを送り出す方向に回転することにより、前記カプセル本体42の外表面42aから離間している螺旋構造部44を長くすることで螺旋外径を大きくする。一方、前記アクチュエータ121は、前記螺旋構造部44の先端44aを巻き取る方向に回転することにより、前記カプセル本体42の外表面42aから離間している螺旋構造部44を短くすることで螺旋外径を小さくする。
【0115】
したがって、前記カプセル3Iは、カプセル本体42の外表面42aから離間している螺旋構造部44を螺旋方向に巻き取り、送り出すことで螺旋全長を変更し、螺旋外径を変化させることができる。本実施例によれば、上記実施例1と同様な効果を得ることに加え、カプセル本体42の外表面42aから離間している螺旋構造部44の螺旋全長を変更して螺旋外径を変化させることができるので、螺旋形状に歪みを発生させること無く確実な螺旋外径の径変化を行える。また、本実施例によれば、前記螺旋構造部44の長さを前記アクチュエータ121により制御しているので、より確実な制御が可能となる。なお、前記カプセル3Iは、前記螺旋構造部44の先端44aを固定して後端44bが巻き取り、送り出される構成でも構わない。
【0116】
また、前記カプセル3Iは、前記アクチュエータ121の代わりに図示しない回転ばねを用いて構成してもよい。この回転ばねは、前記螺旋構造部44に加わる外力に応じてこの螺旋構造部44の先端44aの巻き取り、送り出しを行う。
【0117】
さらに具体的に説明すると、前記回転ばねは、前記螺旋構造部44の螺旋外径が常時大きくなる方向に付勢力を有し、この付勢力に抗して前記螺旋構造部44が管腔内壁と接触することにより、前記螺旋構造部44の先端44aの巻き取り、送り出しを行う。
【0118】
したがって、前記カプセル3Iは、前記カプセル本体42の外表面42aから離間している前記螺旋構造部44と管腔内壁との接触状態に応じてこの螺旋構造部44が最適な螺旋外径となり、螺旋構造部44の螺旋形状を適正に維持して安定した推進力が得られる。
【0119】
本変形例によれば、体腔内管路の管路径に応じて自動的に螺旋構造部44の螺旋外径の径変化が可能となる。また、本変形例によれば、螺旋構造部44の螺旋外径の制御のためにエネルギを必要とせず、構造もシンプルなため、小型化できる。また、本変形例によれば、常に螺旋外径を広げる方向に力が発生するため、管腔内壁と螺旋構造部44との接触状態が保たれて安定した推進力が得られ、体腔内管路の深部方向への挿入性が向上する。
【0120】
さらに、カプセルは、SMAコイルを用いて前記螺旋構造部44の巻き取りを行うように構成してもよい。
図24に示すようにカプセル3Jは、回転ばね123と、SMAコイル124とを設けて構成している。前記SMAコイル124は、前記回転ばね123から延出する前記螺旋構造部44の先端44aが一端に接続されている。また、前記SMAコイル124は、他端が固定板125に接続固定されている。
【0121】
前記SMAコイル124は、図示しないバッテリ及びスイッチにより閉回路を構成し、例えば前記制御装置4から送信される制御信号によりスイッチがオンオフし、バッテリからの電力が供給または供給停止されるようになっている。前記SMAコイル124は、通常伸びている状態であり、スイッチがオンしてバッテリから通電されると縮み、前記螺旋構造部44の先端44aを巻き取るようになっている。これにより、前記カプセル3Jは、前記SMAコイル124に通電して前記螺旋構造部44の先端44aの巻き取りを行うことにより、前記螺旋構造部44の螺旋外径を最小にすることができる。
【0122】
したがって、前記カプセル3Jは、前記回転ばね123の付勢力により前記螺旋構造部44と管腔内壁との接触状態に応じてこの螺旋構造部44が最適な螺旋外径となり、螺旋構造部44の螺旋形状を適正に維持して安定した推進力が得られる。また、前記カプセル3Jは、前記SMAコイル124に通電して前記螺旋構造部44の螺旋外径を最小にすることにより比較的狭い管腔内を移動できる。
【0123】
本実施例によれば、前記螺旋構造部44の螺旋外径を小さくする場合のみ通電するので、比較的広い管腔内を移動する場合、省エネルギ化が可能である。特に、本実施例によれば、腸等の管腔内の気体、液体量が多い場合、又は送気、送水等により広げられた管腔内を移動する場合に有効である。
【0124】
また、カプセルは、前記SMAコイル124により送り出しを行い、前記回転ばね123により巻き取りを行うように構成してもよい。
図25に示すようにカプセル3Kは、前記カプセル3Jとは逆方向に前記螺旋構造部44が前記回転ばね123から延出している。このため、前記カプセル3Kは、通電すると前記SMAコイル124が縮んで前記螺旋構造部44の先端44aを引っ張ることにより前記回転ばね123を逆回転させ、前記螺旋構造部44が送り出されるようになっている。
【0125】
これにより、前記カプセル3Jは、前記SMAコイル124に通電して前記螺旋構造部44の先端44aを引っ張ることにより、前記螺旋構造部44の螺旋外径を大きくすることができる。
【0126】
したがって、前記カプセル3Kは、前記SMAコイル124に通電して前記螺旋構造部44の螺旋外径を大きくすることにより比較的広い管腔内において前記螺旋構造部44が管腔内壁に接触し、良好な接触状態を維持できる。また、前記カプセル3Kは、前記SMAコイル124が非通電状態のとき、前記回転ばね123の付勢力により前記螺旋構造部44と管腔内壁との接触状態に応じてこの螺旋構造部44が最適な螺旋外径となり、螺旋構造部44の螺旋形状を適正に維持して安定した推進力が得られる。
【0127】
本実施例によれば、前記螺旋構造部44の螺旋外径を大きくする場合のみ通電するので、比較的狭い管腔内を移動する場合、省エネルギ化が可能である。
【実施例7】
【0128】
図26及び図27は本発明の実施例7に係り、図26は本発明の実施例7のカプセル型医療装置の構成を示す概略図、図27は図26の螺旋構造部及び弾性体の動作を示す概略図である。
実施例7は上記実施例1の内部構成に加え、カプセル本体42の外表面42aと螺旋構造部44との間の距離を螺旋全長に亘って均一に保持可能に構成する。それ以外の構成は上記実施例1とほぼ同様なので、同じ構成には同じ符号を付して説明を省略する。
【0129】
図26に示すように実施例7のカプセル3Lは、上記実施例1の内部構成に加え、カプセル本体42の外表面42aと螺旋構造部44との間の距離を螺旋全長に亘って均一に保持可能に構成している。
【0130】
さらに具体的に説明すると、前記カプセル3Lは、前記実施例1と同様に前記螺旋構造部44の先端44a及び後端44bがカプセル本体42の外表面42aに固定配置されるとともに、前記カプセル本体42に対して前記カプセル後端部43が所定角度回転自在に構成されている。
【0131】
したがって、前記カプセル3Lは、前記実施例1と同様に前記カプセル後端部43が所定角度回転されることにより、前記螺旋構造部44の先端44aの固定位置に対して前記螺旋構造部44の後端44bの固定位置が前記カプセル本体42の外周方向に移動し、前記螺旋構造部44の螺旋外径を変化させることができる。
【0132】
さらに、前記カプセル3Lは、前記カプセル本体42の外表面42aと螺旋構造部44との間の距離を螺旋全長に亘って均一に保持可能な柱状の弾性体(以下、柱状弾性体)126を前記螺旋構造部44の複数個所に設けている。また、前記カプセル3Lは、前記カプセル本体42の外表面42aに前記柱状弾性体126が摺動可能な周溝127を複数個所形成している。前記柱状弾性体126は、前記螺旋構造部44に一端が固定され、他端が前記周溝127を摺動可能となっている。この柱状弾性体126は、例えば樹脂、シリコーンにより形成されている。
【0133】
このような構成のカプセル3Lは、体腔内管路の管路径に応じてカプセル後端部43が回転して螺旋構造部44の螺旋外径を変化させる。と同時に、図27に示すように前記柱状弾性体126は、前記螺旋外径の変化に伴って曲がりつつ、前記周溝127を摺動して螺旋形状の変化を吸収することができる。したがって、前記カプセル3Lは、前記カプセル本体42の外表面42aと前記螺旋構造部44との間の距離を螺旋全長に亘って均一に保持することができる。
【0134】
本実施例によれば、前記カプセル本体42の外表面42aから離間している前記螺旋構造部44の螺旋形状を螺旋全長に亘って均一に保持できるため、安定した推進力が得られ体腔内管路の深部方向への挿入性が向上する。
【実施例8】
【0135】
図28ないし図31は本発明の実施例8に係り、図28は本発明の実施例8のカプセル型医療装置の構成を示す概略図、図29は図28のカプセル型医療装置の第1変形例を示す概略図、図30は図28のカプセル型医療装置の第2変形例を示す概略図、図31は図28のカプセル型医療装置の第3変形例を示す概略図である。
実施例8は、螺旋外径変化手段として螺旋構造部44の先端44aと後端44bとのいずれか一方の固定位置を長手軸方向に移動させることにより螺旋外径を変化するよう構成する。それ以外の構成は上記実施例1とほぼ同様なので、同じ構成には同じ符号を付して説明を省略する。
【0136】
図28に示すように実施例8のカプセル3Mは、カプセル本体42の中央部後端とカプセル後端部43との間に細径部128が形成されている。この細径部128には、移動部材129が前記カプセル本体42の長手軸方向に進退動可能に設けられている。前記移動部材129には、カプセル本体42に先端44aが固定された螺旋構造部44の後端44bが固定されている。この移動部材129は、前記細径部128に配設されたコイルスプリング130により前記細径部128の端部側に付勢されている。
【0137】
すなわち、前記移動部材129は、前記螺旋構造部44の螺旋外径が広がる方向に付勢している前記コイルスプリング130の付勢力に抗して前記螺旋構造部44の螺旋外径を小さくする方向に移動するようになっている。
【0138】
これにより、前記カプセル3Mは、前記螺旋構造部44と管腔内壁との接触部分に発生する推進力の反力、及び前記螺旋構造部44と管腔内壁との接触部分で生じる径方向への圧縮力によって前記螺旋構造部44に外力が加わると、移動部材129が前記コイルスプリング130の付勢力に抗して長手軸方向に移動し、螺旋構造部44の螺旋外径が小さくなる。したがって、本実施例によれば、腸等の管腔径が小さくなっている部分でも、前記外力によって容易に螺旋構造部44の螺旋外径が変化するため、体腔内管路の深部方向への挿入性が向上する。
【0139】
さらに、カプセルは、上記実施例7と同様に前記柱状弾性体126を設けて構成してもよい。
図29に示すようにカプセル3Nは、前記螺旋構造部44に前記柱状弾性体126を複数箇所設けるとともに、これらの柱状弾性体126が長手軸方向に摺動可能な軸方向溝131を前記カプセル外表面42aに複数個所形成している。
【0140】
これにより、前記カプセル3Nは、前記柱状弾性体126が前記螺旋構造部44の螺旋外径の変化に伴って曲がりつつ、前記軸方向溝131を摺動して螺旋形状の変化を吸収することができる。したがって、前記カプセル3Nは、前記カプセル本体42の外表面42aと前記螺旋構造部44との間の距離を螺旋全長に亘って均一に保持することができる。
【0141】
したがって、本変形例によれば、前記実施例8と同様な効果を得ることに加え、実施例7と同様に前記螺旋構造部44の螺旋形状を螺旋全長に亘って均一に保持できるため、安定した推進力が得られ体腔内管路の深部方向への挿入性が向上する。
【0142】
また、カプセルは、前記カプセル後端部43を長手軸方向に進退自在に構成してもよい。
図30に示すようにカプセル3Pは、カプセル後端部43を進退自在に構成してこのカプセル後端部43に固定されている前記螺旋構造部44の後端44bの固定位置を進退動するように構成している。さらに具体的に説明すると、前記カプセル3Pは、前記細径部128が長手軸方向に進退自在に前記カプセル本体42に内蔵されている。
【0143】
前記細径部128には、ロッド132a先端が連結されている。このロッド132aは、アクチュエータ132に噛合している。前記アクチュエータ132は、前記ロッド132aを噛合する図示しないピニオンを有し、このピニオンを図示しないモータにより回転させて前記ロッド132aを軸方向に進退させる軸方向移動アクチュエータである。このアクチュエータ132は、図示しない制御回路に接続されており、この制御回路は、前記制御装置4から送信される制御信号に基づいて前記アクチュエータ132を制御駆動するようになっている。
【0144】
前記アクチュエータ132は、前記ロッド132aを進退動することにより前記細径部128を長手軸方向に進退動し、結果として前記カプセル後端部43を長手軸方向に進退させるようになっている。
【0145】
これにより、カプセル3Pは、前記実施例8と同様な効果を得ることに加え、螺旋構造部44の螺旋外径が大きいときには、カプセル全長が短くなるので方向転換等し易くなるとともに確実な螺旋外径の制御が可能となり、体腔内管路の深部方向への挿入性が向上する。
【0146】
なお、カプセルは、カプセル本体42の全長を変えずに、前記螺旋構造部44の後端44bの固定位置を長手軸方向に移動可能に構成してもよい。
図31に示すようにカプセル3Qは、螺旋構造部44の後端44bの固定位置を長手軸方向に進退させる移動部133を設けて構成している。前記移動部133は、前記螺旋構造部44の後端44bを固定配置している固定部133aを長手軸方向に進退動させるようになっている。前記固定部133aは、前記カプセル本体42の外表面42aに露出されている。前記移動部133は、前記固定部133aを長手軸方向に進退動させる機構が前記カプセル本体42内部に設けられている。
【0147】
さらに具体的に説明すると、前記移動部133は、前記固定部133aの背面側を収納する収納室133bを有し、この収納室133bの端部側に前記固定部133aを付勢する板ばね133cが配設されている。前記板ばね133cは、前記螺旋構造部44の螺旋外径が広がる方向に付勢している。すなわち、前記移動部133は、前記板ばね133cの付勢力に抗して前記螺旋構造部44の螺旋外径を小さくする方向に前記固定部133aを移動させるようになっている。
【0148】
また、カプセル3Qは、前記カプセル3Nと同様に前記螺旋構造部44に前記柱状弾性体126を複数箇所設けるとともに、これらの柱状弾性体126が長手軸方向に摺動可能な軸方向溝131Qを前記カプセル外表面42aに複数個所形成している。なお、前記軸方向溝131Qは、前記軸方向溝131に比べてカプセル本体42の外表面42aの全長に亘って形成され、当該長手軸方向に位置する前記柱状弾性体126を複数摺動可能となっている。
【0149】
これにより、前記カプセル3Qは、前記柱状弾性体126が前記螺旋構造部44の螺旋外径の変化に伴って曲がりつつ、前記軸方向溝131を摺動して螺旋形状の変化を吸収することができる。したがって、前記カプセル3Qは、前記カプセル本体42の外表面42aと前記螺旋構造部44との間の距離を螺旋全長に亘って均一に保持することができる。
【0150】
したがって、本変形例によれば、前記実施例8と同様な効果を得ることに加え、実施例7と同様に前記螺旋構造部44の螺旋形状を螺旋全長に亘って均一に保持できるため、安定した推進力が得られ体腔内管路の深部方向への挿入性が向上する。
【実施例9】
【0151】
図32ないし図37は本発明の実施例9に係り、図32は本発明の実施例9のカプセル型医療装置の構成を示す概略図、図33は図32の螺旋構造部の螺旋外径変化を示すカプセル型医療装置の正面図、図34は断面二次モーメントをカプセル本体の長手軸方向に最小となるように形成した柱状弾性体の動作を示す説明図、図35は図32のカプセル型医療装置の第1変形例を示す概略図、図36は図32のカプセル型医療装置の第2変形例を示す概略図、図37は図32のカプセル型医療装置の第3変形例を示す概略図、図38は図37の螺旋構造部の螺旋外径変化を示すカプセル型医療装置の正面図である。
【0152】
実施例9は、螺旋外径変化手段として螺旋構造部44とカプセル本体42の外表面42aとの間を前記柱状弾性体126により連結して構成する。それ以外の構成は上記実施例1とほぼ同様なので、同じ構成には同じ符号を付して説明を省略する。
【0153】
図32に示すように実施例9のカプセル3Rは、前記螺旋構造部44が切断され、隣り合う螺旋同士の間隔を所定距離離間して前記カプセル本体42の外表面42aに複数配置されて構成している。前記複数の螺旋構造部44は、それぞれカプセル本体42の外表面42aとの間を前記柱状弾性体126により連結されている。
【0154】
さらに具体的に説明すると、前記複数の螺旋構造部44は、それぞれの両端部に前記柱状弾性体126を設けている。これら柱状弾性体126は、前記カプセル本体42の外表面42aに接着等により固定され、当該螺旋構造部44を前記カプセル本体42の外表面42aに支持固定している。なお、前記柱状弾性体126は、前記螺旋構造部44の螺旋方向に曲がり易いように断面二次モーメントを螺旋方向に最小となるように形成されている。
【0155】
このような構成のカプセル3Rは、前記螺旋構造部44と管腔内壁との接触部分に発生する推進力の反力、及び前記螺旋構造部44と管腔内壁との接触部分で生じる径方向への圧縮力によって前記螺旋構造部44に外力が加わると、図33に示すように前記柱状弾性体126が螺旋方向に広がるように曲がることにより、前記螺旋構造部44の螺旋外径が小さくなる。前記螺旋構造部44は、隣り合う螺旋同士の間隔を所定距離離間して前記カプセル本体42の外表面42aに配置されているが、螺旋外径が小さくなることにより螺旋全長の短縮を吸収するようになっている。
【0156】
これにより、カプセル3Rは、上記実施例3及び実施例6と同様な効果を得ることに加え、前記柱状弾性体126が螺旋方向に曲がるので、前記螺旋構造部44が径方向にのみ変化することにより体腔内管路の深部方向への挿入性が向上する。
【0157】
なお、カプセル3Rは、前記柱状弾性体126が前記カプセル本体42の長手軸方向に倒れるように形成して前記螺旋構造部44の螺旋外径を変化するように構成してもよい。 図34に示すように前記柱状弾性体126は、断面二次モーメントが前記カプセル本体42の長手軸方向に対して最小となるように形成している。
【0158】
これにより、カプセル3Rは、前記螺旋構造部44と管腔内壁との接触部分に発生する推進力の反力、及び前記螺旋構造部44と管腔内壁との接触部分で生じる径方向への圧縮力によって前記螺旋構造部44に外力が加わると、前記柱状弾性体126が前記カプセル本体42の長手軸方向に倒れることにより、前記螺旋構造部44の螺旋外径が小さくなる。したがって、カプセル3Rは、前記螺旋構造部44が前記カプセル本体42の長手軸方向に倒れるので、腸等の細い管腔に挿入していく螺旋外径変化が起こり易くなり、体腔内管路の深部方向への挿入性が向上する。
【0159】
また、カプセルは、外周方向に隣り合う螺旋構造部44を連結して構成してもよい。
図35に示すようにカプセル3Sは、外周方向に隣り合う螺旋構造部44を弾性部材134により連結して構成している。これにより、前記カプセル3Sは、螺旋構造部44の繋ぎ目がなだらかに形成されるので、カプセル本体42の回転時の抵抗が小さくなり、効率よく回転、推進が可能となり、よって体腔内管路の深部方向への挿入性が向上する。
【0160】
また、カプセルは、前記複数の螺旋構造部44をカプセル本体42の長手軸方向に互い違いに配置して構成してもよい。
図36に示すようにカプセル3Tは、複数の螺旋構造部44が重なるようにカプセル本体42の長手軸方向に互い違いに配置して構成している。
【0161】
これにより、前記カプセル3Tは、複数の螺旋構造部44がカプセル本体42の長手軸方向に互い違いに位置しているので、螺旋外径が小さくなったとき、長手軸方向に隣り合う螺旋構造部44が重なるようにして螺旋全長の短縮を吸収することができる。また、前記カプセル3Tは、略連続的に螺旋構造部44を設けることができるので、効率的に推進力が得られ、体腔内管路の深部方向への挿入性が向上する。
【0162】
また、カプセルは、カプセル本体42の長手軸方向に略アーチ状に設けた複数の弾性部材に前記複数の螺旋構造部44を外周方向に互い違いに連結して構成してもよい。
図37に示すようにカプセル3Uは、カプセル本体42の長手軸方向に複数の弾性部材135を略アーチ状に設け、これらのアーチ状弾性部材135に前記複数の螺旋構造部44を外周方向に互い違いに連結して構成している。
【0163】
さらに具体的に説明すると、カプセル3Uは、2本一組のアーチ状弾性部材135をカプセル本体42の長手軸方向にカプセル先端側と後端側とに両端を固定して複数設けている。カプセル3Uは、前記2本一組のアーチ状弾性部材135に対して前記複数の螺旋構造部44が重なるようにカプセル本体42の長手軸方向に互い違いに連結している。
【0164】
このような構成のカプセル3Uは、前記螺旋構造部44と管腔内壁との接触部分に発生する推進力の反力、及び前記螺旋構造部44と管腔内壁との接触部分で生じる径方向への圧縮力によって前記螺旋構造部44に外力が加わると、図38に示すように隣り合うアーチ状弾性部材135が外周方向に撓んで広がることにより、前記螺旋構造部44の螺旋外径が小さくなる。
【0165】
これにより、前記カプセル3Uは、上記実施例9と同様な効果を得ることに加え、前記アーチ状弾性部材135を前記柱状弾性体126に比べて長く形成しているので柔らかい構造が製作可能である。したがって、前記カプセル3Uは、腸壁からの小さな力でも敏感に螺旋構造部44の螺旋外径を変化させることができるので、体腔内管路の深部方向への挿入性が向上する。
【実施例10】
【0166】
図39ないし図41は本発明の実施例10に係り、図39は本発明の実施例10のカプセル型医療装置の構成を示す概略図、図40は図39の螺旋構造部の螺旋外径変化を示すカプセル型医療装置の正面図、図41は図39のカプセル型医療装置の第2変形例を示す概略図である。
実施例10は、螺旋外径変化手段として複数の弾性部材により螺旋構造部44を形成して構成する。それ以外の構成は上記実施例1とほぼ同様なので、同じ構成には同じ符号を付して説明を省略する。
【0167】
図39に示すように実施例10のカプセル3Vは、複数の弾性部材136により螺旋構造部44を形成して構成している。さらに具体的に説明すると、前記複数の弾性部材136は、前記カプセル本体42の外表面42aに両端を接着等に固定して外周方向に互い違いに重なるように配置される。
【0168】
このような構成のカプセル3Vは、前記螺旋構造部44を形成している複数の弾性部材136と管腔内壁との接触部分に発生する推進力の反力、及び前記複数の弾性部材136と管腔内壁との接触部分で生じる径方向への圧縮力によって前記複数の弾性部材136に外力が加わると、図40に示すように隣り合う弾性部材136が外周方向に撓んで広がることにより、螺旋外径が小さくなる。このとき、カプセル3Vは、長手軸方向に隣り合う弾性部材136が重なるようにして螺旋全長の短縮を吸収することができる。
【0169】
これにより、前記カプセル3Vは、上記実施例9と同様な効果を得ることに加え、略連続的に螺旋構造部44を設けることができるので、効率的に推進力が得られる。また、カプセル3Vは、前記複数の弾性部材136を前記柱状弾性体126に比べて長く形成しているので柔らかい構造が製作可能であり、腸壁からの小さな力でも敏感に螺旋外径を変化させることができる。したがって、前記カプセル3Vは、体腔内管路の深部方向への挿入性が向上する。
【0170】
なお、カプセルは、前記複数の弾性部材136をそれぞれ独立に設けて構成してもよい。
図41に示すようにカプセル3Wは、前記複数の弾性部材136を離間してそれぞれ独立に前記カプセル本体42の外表面42aに配置して構成している。
【0171】
これにより、カプセル3Wは、前記実施例10と同様な効果を得ることに加え、実施例7と同様に前記螺旋構造部44の螺旋形状を螺旋全長に亘って均一に保持できるため、安定した推進力が得られ体腔内管路の深部方向への挿入性が向上する。
【実施例11】
【0172】
図42及び図43は本発明の実施例11に係り、図42は本発明の実施例11のカプセル型医療装置の構成を示す概略図、図43はカプセル本体の外周方向に断面二次モーメントが小さくなる形状に形成した柱状弾性体の動作を示すカプセル型医療装置の正面図である。
実施例11は、複数の柱状弾性体を螺旋状に連続的に配置して螺旋構造部44を形成して構成する。それ以外の構成は上記実施例1とほぼ同様なので、同じ構成には同じ符号を付して説明を省略する。
【0173】
図42に示すように実施例11のカプセル3Xは、複数の柱状弾性体137をカプセル本体42の外表面42aに連続的に螺旋状に配置固定して螺旋構造部44を形成して構成している。前記柱状弾性体137は、球状に形成した頭部137aを有して管腔内壁に滑らかに接触可能に構成されている。なお、前記頭部137aは、管腔内壁に滑らかに接触可能であれば球状でなくともよく、半球状、円錐上等に形成してもよい。
【0174】
また、前記柱状弾性体137は、それぞれ互いに独立して前記カプセル本体42の外表面42aに配置しているので、柔らかく、均一な螺旋構造部44が形成可能である。これにより、前記カプセル3Xは、推進力の均一性が保たれ、体腔内管路の深部方向への挿入性が向上する。
【0175】
なお、前記柱状弾性体137は、断面二次モーメントが前記カプセル本体42の長手軸方向に対して最小となるように形成している。これにより、前記カプセル3Xは、前記柱状弾性体137と管腔内壁との接触部分に発生する推進力の反力、及び前記柱状弾性体137と管腔内壁との接触部分で生じる径方向への圧縮力によって前記柱状弾性体137に外力が加わると、前記カプセル本体42の長手軸方向に撓むことにより、前記螺旋構造部44の螺旋外径が小さくなる。
【0176】
したがって、本実施例によれば、腸等の管腔径が小さくなっている部分(閉じた部分)でも、前記外力によって容易に螺旋構造部44の螺旋外径が変化するため、体腔内管路の深部方向への挿入性が向上する。
【0177】
なお、前記柱状弾性体137は、螺旋方向に断面二次モーメントが小さくなる形状に形成してもよい。これにより、前記カプセル3Xは、前記柱状弾性体137が螺旋方向に撓むので、螺旋外径変化時に螺旋構造部44に垂直方向への変化がない。したがって、前記カプセル3Xは、螺旋構造部44の外径変化が効率的に可能となり、推進性が向上する。
【0178】
また、前記柱状弾性体137は、前記カプセル本体42の外周方向に断面二次モーメントが小さくなる形状に形成してもよい。これにより、前記カプセル3Xは、図43に示すように前記柱状弾性体137がカプセル本体42の外周方向に撓むので、カプセル本体42の回転動作方向に螺旋構造部44が変化する。したがって、前記カプセル3Xは、螺旋外径変化がカプセル本体42の回転動作の抵抗にならないので、効率的な回転動作ができ、挿入性が向上する。
【実施例12】
【0179】
図44ないし図48は本発明の実施例12に係り、図44は本発明の実施例12のカプセル型医療装置の構成を示す概略図、図45は図44のカプセル型医療装置の第1変形例を示す概略図、図46は図44のカプセル型医療装置の第2変形例を示す概略図、図47は図44のカプセル型医療装置の第3変形例を示す概略図、図48は図47の螺旋構造部の螺旋外径変化を示すカプセル型医療装置の正面図である。
【0180】
上記実施例9〜11は螺旋外径変化手段として柱状弾性体または弾性部材を用いて構成しているが、実施例12は螺旋外径変化手段として上記実施例9〜11の構成に加え、前記柱状弾性体または弾性部材を機械的に傾けさせるように構成する。それ以外の構成は上記実施例9〜11とほぼ同様なので、同じ構成には同じ符号を付して説明を省略する。
【0181】
なお、実施例12は、上記実施例11の柱状弾性体137を代表例として説明する。
【0182】
図44に示すように実施例12のカプセル3Yは、カプセル内部構造体138と、このカプセル内部構造体138を収納するカプセルシース139と有して構成している。前記カプセル内部構造体138には、上記実施例1で説明したマグネット8、対物光学系21、撮像素子22、照明素子23等が収納されている。前記カプセル内部構造体138は、外周面に前記柱状弾性体137を複数固定配置して螺旋構造部44を設けている。
【0183】
前記カプセルシース139は、前記先端カバー41と、前記カプセル内部構造体138を収納する収納部139aと、前記カプセル後端部43とを有して構成している。前記カプセルシース139は、前記収納部139aに前記カプセル内部構造体138を収納している。また、前記カプセルシース139は、前記複数の柱状弾性体137を貫通孔139bを介してシース外表面139cに突出させている。この場合、前記シース外表面は、カプセル本体42の外表面42aとなる。
【0184】
前記カプセルシース139は、前記カプセル内部構造体138を長手軸方向に進退動させるためのアクチュエータ140が前記カプセル後端部43に収納配置されている。
【0185】
前記アクチュエータ140は、ロッド140aを噛合している。前記アクチュエータ140は、ロッド140aを進退動させる。この進退動されるロッド140aの先端には、前記カプセル内部構造体138が連結されている。
【0186】
前記アクチュエータ140は、前記ロッド140aを進退動させることにより前記カプセルシース139に対して前記カプセル内部構造体138を長手軸方向に相対的に進退動させる。すると、前記カプセルシース139は、前記貫通孔139bの壁面により前記柱状弾性体137を押圧してこの柱状弾性体137をカプセル長手軸方向に傾けさせる。
【0187】
これにより、前記カプセル3Yは、前記柱状弾性体137により形成される螺旋構造部44の螺旋外径を小さくすることができ、上記実施例11と同様な効果を得ることができる。また、前記カプセル3Yは、前記貫通孔139b分の小さな動きで螺旋構造部44の螺旋外径を変化させることができるので、前記アクチュエータ140によるロッド140aのストロークを小さくして小型化できる。
【0188】
なお、前記カプセル3Yは、上記実施例11で説明した柱状弾性体137を用いて説明しているが、上記実施例9〜10までの柱状弾性体または弾性部材を用いて構成しても同様な効果を得る。
【0189】
また、カプセルは、前記アクチュエータ140の代わりにコイルスプリング及びSMAワイヤを用いて構成してもよい。
図45に示すようにカプセル3Zは、前記アクチュエータ140の代わりにコイルスプリング141及びSMAワイヤ142を前記カプセル後端部43に収納配置して構成している。
【0190】
前記SMAワイヤ142の一端は、前記カプセル内部構造体138に連結され、他端は前記カプセル後端部43の内壁に固定されている。また、前記コイルスプリング141は、前記カプセル内部構造体138をカプセル先端側に常時付勢している。
【0191】
前記SMAワイヤ142は、図示しないスイッチがオンして通電されることにより、前記コイルスプリング141の付勢力に抗して縮み、前記カプセル内部構造体138をカプセル後端側へ退かせるようになっている。これにより、前記SMAワイヤ142は、通電により前記柱状弾性体137を傾けさせてこの柱状弾性体137により形成される螺旋構造部44の螺旋外径を小さくすることができる。
【0192】
したがって、カプセル3Zは、前記柱状弾性体137により形成される螺旋構造部44の螺旋外径を小さくすることができ、上記実施例12と同様な効果を得ることができる。
【0193】
また、図46に示すように前記カプセル3Zは、前記貫通孔139bの位置を変更することにより、前記柱状弾性体137をカプセル先端側に傾けさせた状態から垂直に立たせた状態すなわち、螺旋構造部44の螺旋外径が小さくなる状態から大きくなる状態にすることも可能である。
【0194】
また、カプセルは、前記アクチュエータ140の代わりにモータを用いて構成してもよい。
図47に示すようにカプセル3αは、前記アクチュエータ140の代わりにモータ143を前記カプセル後端部43に収納配置して構成している。
【0195】
前記モータ143は、駆動軸143aが前記カプセル内部構造体138に接続され、このカプセル内部構造体138を回転自在に所定角度回転させるようになっている。なお、このモータ143は、パルスモータである。
【0196】
これにより、前記カプセル3αは、前記モータ143を所定角度回転することにより、前記カプセルシース139に対して前記カプセル内部構造体138が相対的に所定角度回転される。したがって、前記カプセル3αは、図48に示すように前記貫通孔139bの壁面により前記柱状弾性体137を押圧してこの柱状弾性体137をカプセル外周方向に傾けさせ、この柱状弾性体137により形成される螺旋構造部44の螺旋外径を小さくすることができる。この結果、前記カプセル3αは、上記実施例12と同様な効果を得ることができる。
【0197】
なお、上述した各実施例等を部分的に組み合わせる等して構成される実施例も本発明に属する。
【産業上の利用可能性】
【0198】
本発明の被検体内挿入装置は、螺旋構造部の螺旋形状を適正に維持して安定した推進力が得られるようにしたので、被検体内で検査、治療又は処置などの医療行為に好適に利用することができる。
【図面の簡単な説明】
【0199】
【図1】本発明の実施例1を備えたカプセル医療装置誘導システムの概略の構成を示す全体構成図である。
【図2】図1のより詳細な構成を示すブロック図である。
【図3】磁場発生装置の構成を示す概略図である。
【図4】カプセル型医療装置の外観を示す側面図である。
【図5】カプセル型医療装置の構成を示す概略図である。
【図6】カプセル後端部の回転に伴って螺旋構造部の螺旋外径が変化される様子を示す説明図である。
【図7】図5のカプセル型医療装置の第1変形例を示す概略図である。
【図8】図5のカプセル型医療装置の第2変形例を示す概略図である。
【図9】本発明の実施例2のカプセル型医療装置を示す説明図である。
【図10】図9のカプセル型医療装置の構成を示す概略図である。
【図11】本発明の実施例3のカプセル型医療装置を示す説明図である。
【図12】バルーンの膨張・収縮に伴って螺旋構造部の螺旋外径が変化される様子を示す説明図である。
【図13】バルーンが膨張したときのカプセル型医療装置を示す説明図である。
【図14】図11のカプセル型医療装置の第1変形例を示す概略図である。
【図15】図11のカプセル型医療装置の第2変形例を示す概略図である。
【図16】図11のカプセル型医療装置の第3変形例を示す概略図である。
【図17】本発明の実施例4のカプセル型医療装置を示す説明図である。
【図18】図17のカプセル型医療装置の構成を示す概略図である。
【図19】図17のカプセル型医療装置の変形例を示す説明図である。
【図20】図19のカプセル型医療装置の構成を示す概略図である。
【図21】本発明の実施例5の内視鏡挿入部を示す説明図である。
【図22】図21の内視鏡挿入部の構成を示す概略図である。
【図23】本発明の実施例6のカプセル型医療装置の構成を示す概略図である。
【図24】図23のカプセル型医療装置の第1変形例を示す概略図である。
【図25】図23のカプセル型医療装置の第2変形例を示す概略図である。
【図26】本発明の実施例7のカプセル型医療装置の構成を示す概略図である。
【図27】図26の螺旋構造部及び弾性体の動作を示す概略図である。
【図28】本発明の実施例8のカプセル型医療装置の構成を示す概略図である。
【図29】図28のカプセル型医療装置の第1変形例を示す概略図である。
【図30】図28のカプセル型医療装置の第2変形例を示す概略図である。
【図31】図28のカプセル型医療装置の第3変形例を示す概略図である。
【図32】本発明の実施例9のカプセル型医療装置の構成を示す概略図である。
【図33】図32の螺旋構造部の螺旋外径変化を示すカプセル型医療装置の正面図である。
【図34】断面二次モーメントをカプセル本体の長手軸方向に最小となるように形成した柱状弾性体の動作を示す説明図である。
【図35】図32のカプセル型医療装置の第1変形例を示す概略図である。
【図36】図32のカプセル型医療装置の第2変形例を示す概略図である。
【図37】図32のカプセル型医療装置の第3変形例を示す概略図である。
【図38】図37の螺旋構造部の螺旋外径変化を示すカプセル型医療装置の正面図である。
【図39】本発明の実施例10のカプセル型医療装置の構成を示す概略図である。
【図40】図39の螺旋構造部の螺旋外径変化を示すカプセル型医療装置の正面図である。
【図41】図39のカプセル型医療装置の第2変形例を示す概略図である。
【図42】本発明の実施例11のカプセル型医療装置の構成を示す概略図である。
【図43】カプセル本体の外周方向に断面二次モーメントが小さくなる形状に形成した柱状弾性体の動作を示すカプセル型医療装置の正面図である。
【図44】本発明の実施例12のカプセル型医療装置の構成を示す概略図である。
【図45】図44のカプセル型医療装置の第1変形例を示す概略図である。
【図46】図44のカプセル型医療装置の第2変形例を示す概略図である。
【図47】図44のカプセル型医療装置の第3変形例を示す概略図である。
【図48】図47の螺旋構造部の螺旋外径変化を示すカプセル型医療装置の正面図である。
【符号の説明】
【0200】
1 カプセル型医療装置誘導システム
3 カプセル型医療装置
4 カプセル制御装置
5 磁場発生装置
6 交流電源装置
8 マグネット
22 撮像素子
23 照明素子
30 モータ
41 先端カバー
42 カプセル本体
43 カプセル後端部
44 螺旋構造部
45 ベアリング
【特許請求の範囲】
【請求項1】
被検体内に挿入する挿入部本体と、
前記挿入部本体を回転させる回転機構と、
前記回転機構による前記挿入部本体の回転運動を推進力に変換する、前記挿入部本体の外表面に対して径方向に分離して設けた螺旋構造部と、
前記挿入部本体の外表面に対して径方向に分離して設けた前記螺旋構造部の螺旋外径を変化させる螺旋外径変化手段と、
を具備したことを特徴とする被検体内挿入装置。
【請求項2】
前記螺旋外径変化手段は、前記螺旋構造部の一方端と他方端とのいずれか一方を前記挿入部本体の外周方向または長手軸方向に移動可能に固定し、この固定位置を前記挿入部本体の外周方向または長手軸方向に移動させることにより前記螺旋構造部の螺旋外径を変化させることを特徴とする請求項1に記載の被検体内挿入装置。
【請求項3】
前記螺旋外径変化手段は、前記挿入部本体の外表面から離間している前記螺旋構造部の長さを螺旋方向に変更することにより前記螺旋構造部の螺旋外径を変化させることを特徴とする請求項1に記載の被検体内挿入装置。
【請求項4】
前記螺旋外径変化手段は、前記挿入部本体と前記螺旋構造部との間に設け、これら挿入部本体と螺旋構造部との間の距離を変更することにより前記螺旋構造部の螺旋外径を変化させることを特徴とする請求項1に記載の被検体内挿入装置。
【請求項1】
被検体内に挿入する挿入部本体と、
前記挿入部本体を回転させる回転機構と、
前記回転機構による前記挿入部本体の回転運動を推進力に変換する、前記挿入部本体の外表面に対して径方向に分離して設けた螺旋構造部と、
前記挿入部本体の外表面に対して径方向に分離して設けた前記螺旋構造部の螺旋外径を変化させる螺旋外径変化手段と、
を具備したことを特徴とする被検体内挿入装置。
【請求項2】
前記螺旋外径変化手段は、前記螺旋構造部の一方端と他方端とのいずれか一方を前記挿入部本体の外周方向または長手軸方向に移動可能に固定し、この固定位置を前記挿入部本体の外周方向または長手軸方向に移動させることにより前記螺旋構造部の螺旋外径を変化させることを特徴とする請求項1に記載の被検体内挿入装置。
【請求項3】
前記螺旋外径変化手段は、前記挿入部本体の外表面から離間している前記螺旋構造部の長さを螺旋方向に変更することにより前記螺旋構造部の螺旋外径を変化させることを特徴とする請求項1に記載の被検体内挿入装置。
【請求項4】
前記螺旋外径変化手段は、前記挿入部本体と前記螺旋構造部との間に設け、これら挿入部本体と螺旋構造部との間の距離を変更することにより前記螺旋構造部の螺旋外径を変化させることを特徴とする請求項1に記載の被検体内挿入装置。
【図1】


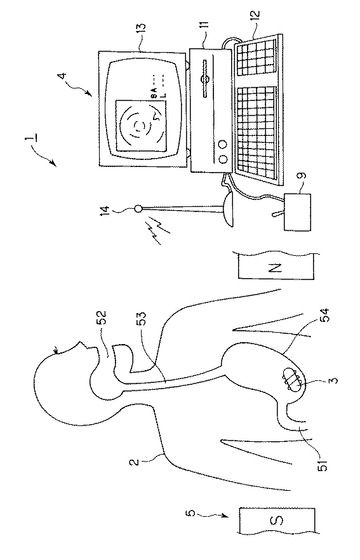
【図2】
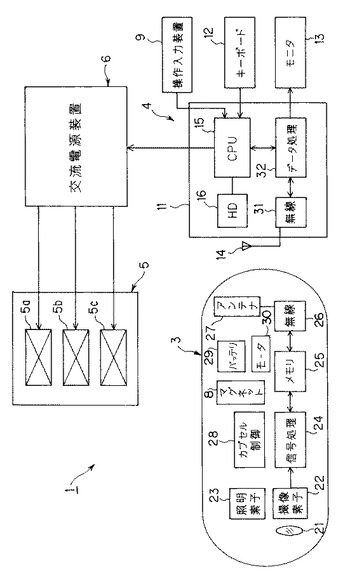
【図3】
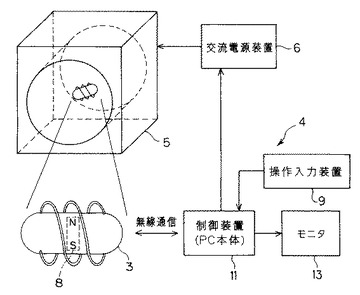
【図4】
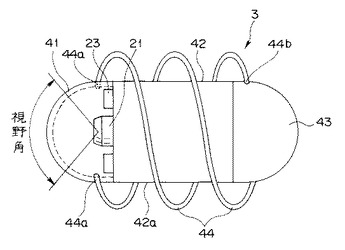
【図5】
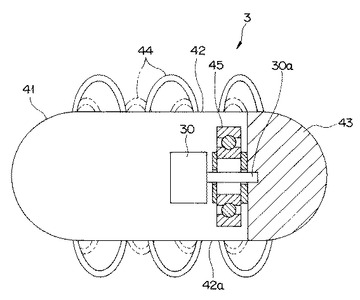
【図6】
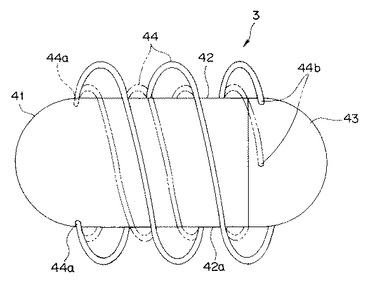
【図7】
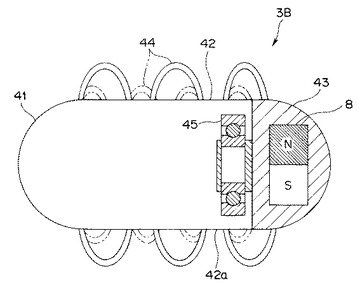
【図8】
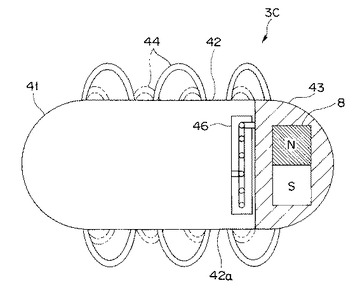
【図9】
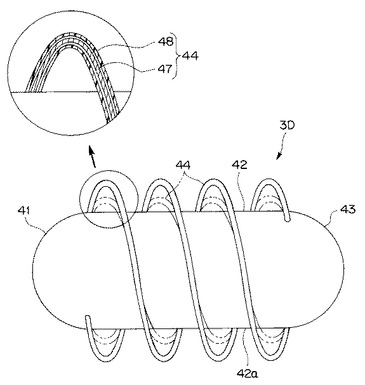
【図10】
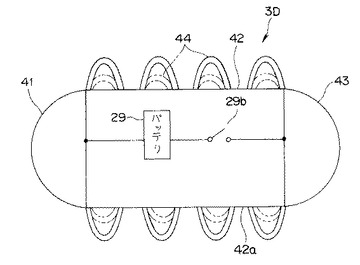
【図11】
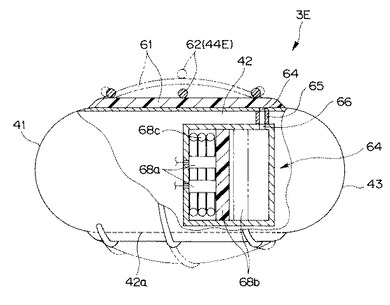
【図12】
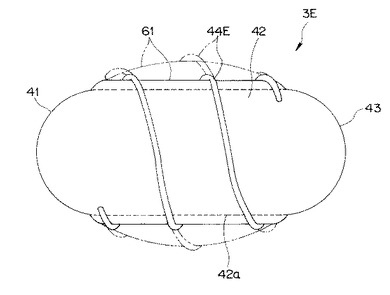
【図13】
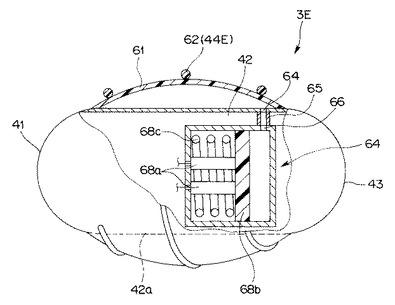
【図14】
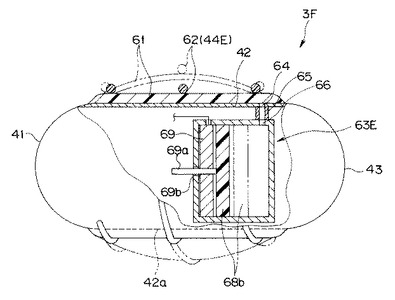
【図15】
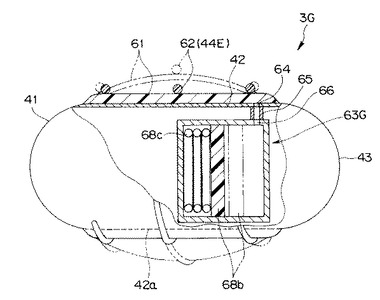
【図16】
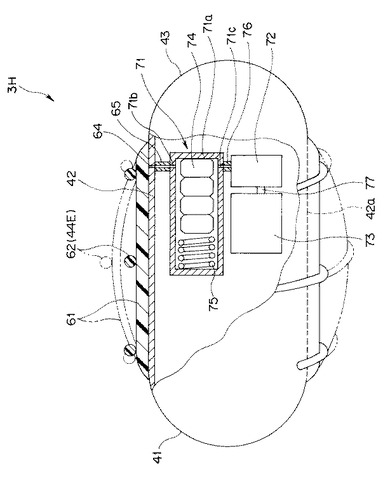
【図17】
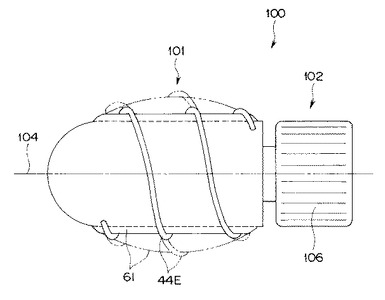
【図18】
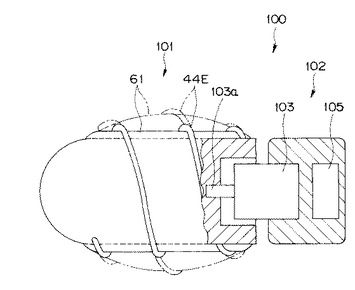
【図19】
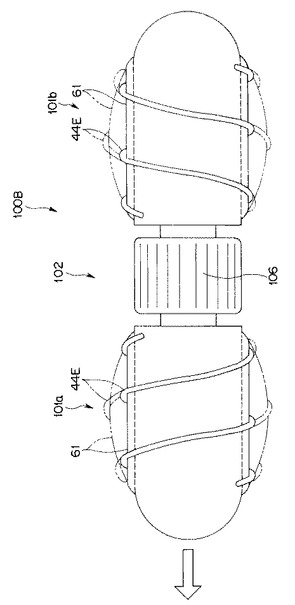
【図20】
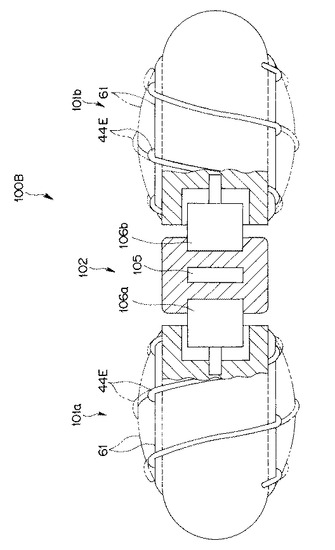
【図21】
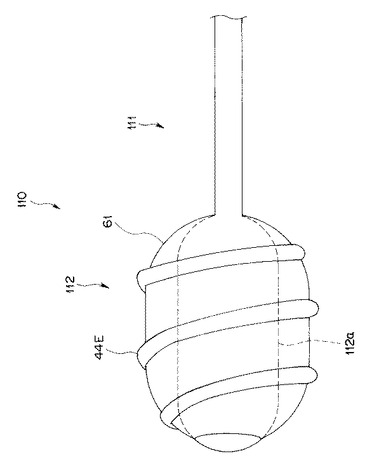
【図22】
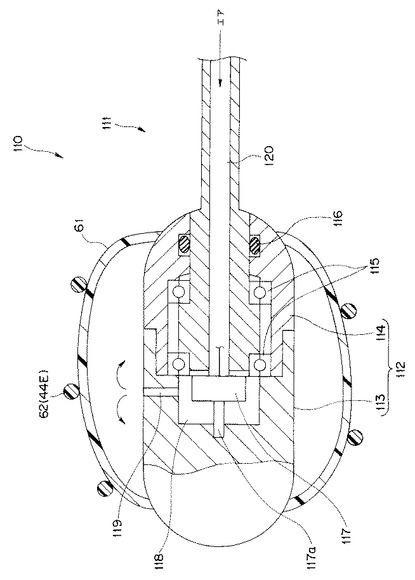
【図23】
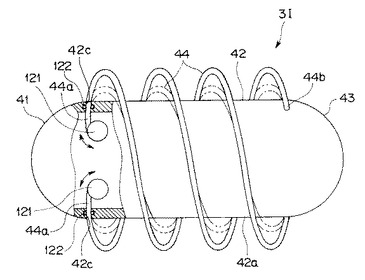
【図24】
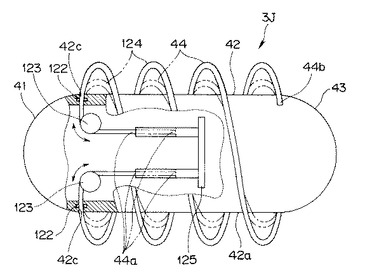
【図25】
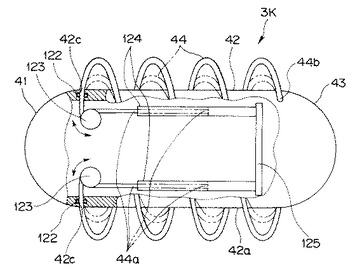
【図26】
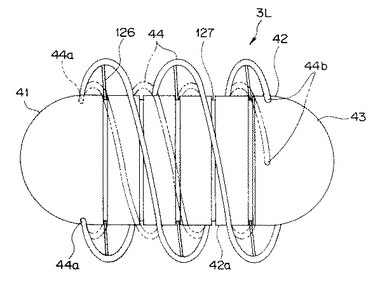
【図27】
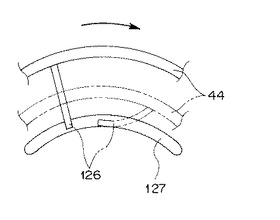
【図28】
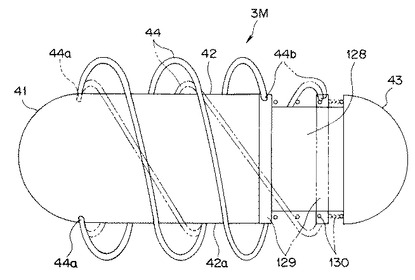
【図29】
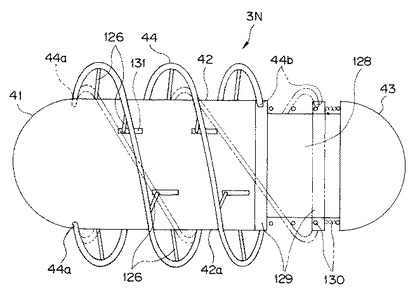
【図30】
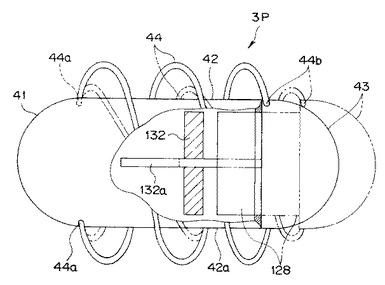
【図31】
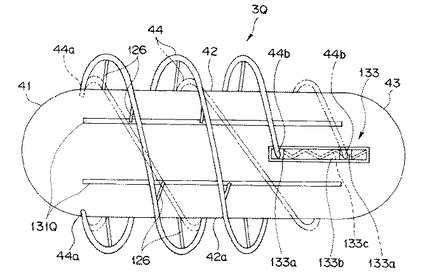
【図32】
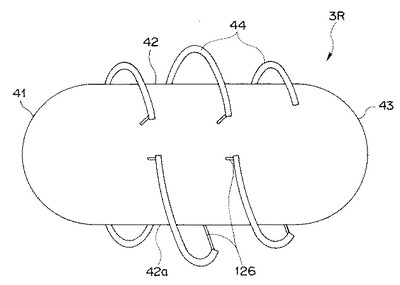
【図33】
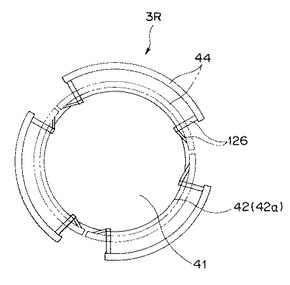
【図34】
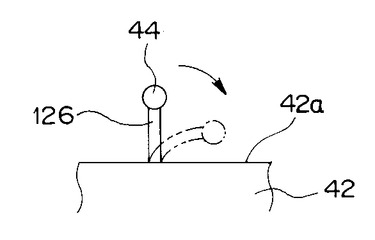
【図35】
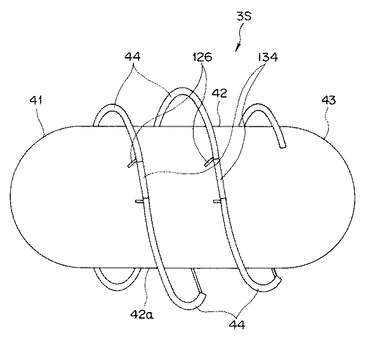
【図36】
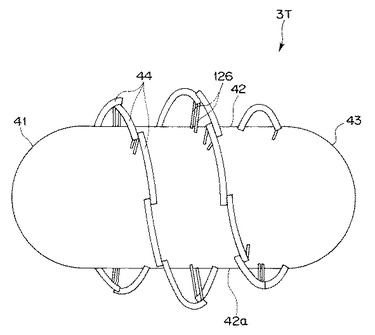
【図37】
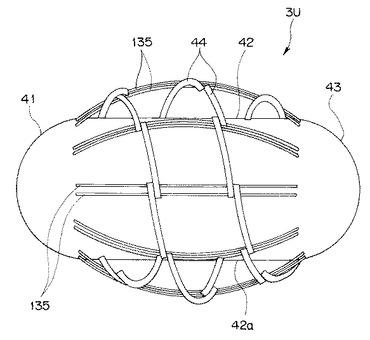
【図38】
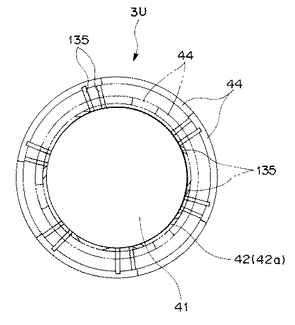
【図39】
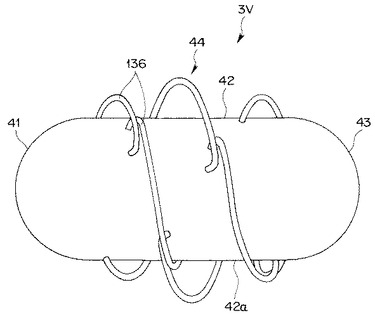
【図40】
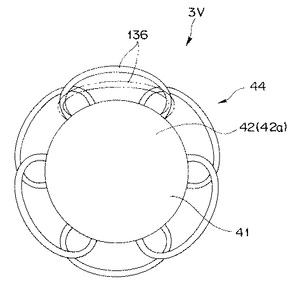
【図41】
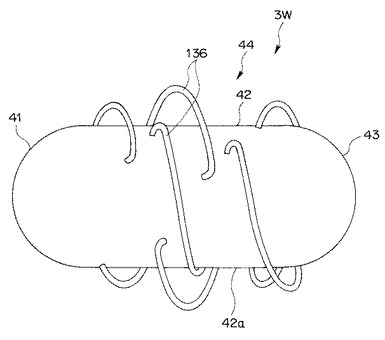
【図42】
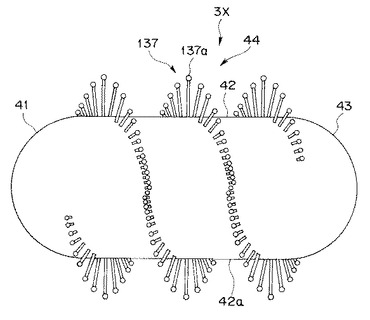
【図43】
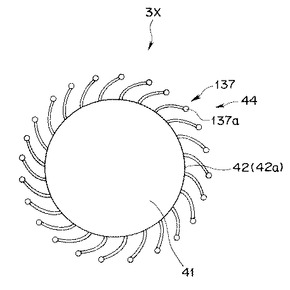
【図44】
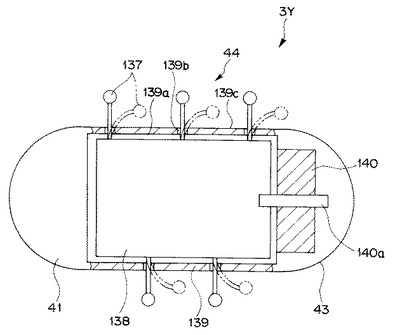
【図45】
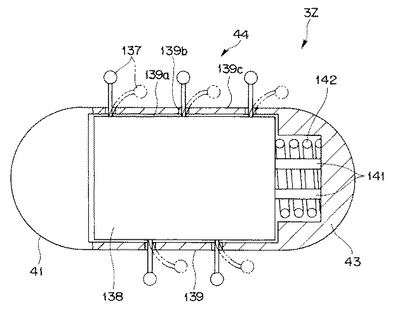
【図46】
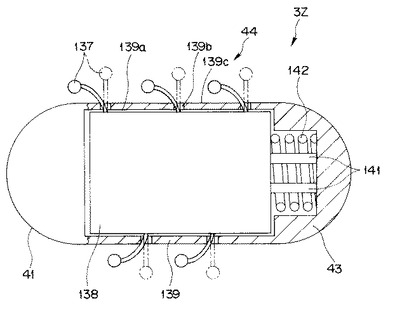
【図47】
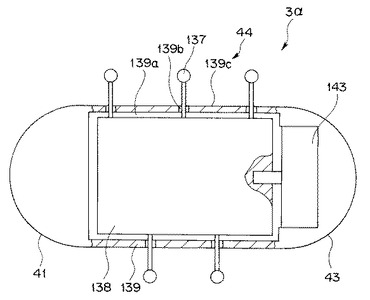
【図48】
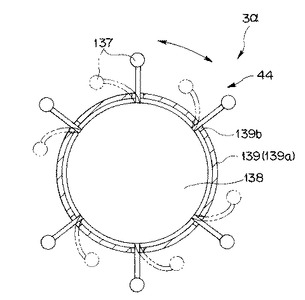
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32】
【図33】
【図34】
【図35】
【図36】
【図37】
【図38】
【図39】
【図40】
【図41】
【図42】
【図43】
【図44】
【図45】
【図46】
【図47】
【図48】
【公開番号】特開2007−125356(P2007−125356A)
【公開日】平成19年5月24日(2007.5.24)
【国際特許分類】
【出願番号】特願2006−15611(P2006−15611)
【出願日】平成18年1月24日(2006.1.24)
【出願人】(000000376)オリンパス株式会社 (11,466)
【Fターム(参考)】
【公開日】平成19年5月24日(2007.5.24)
【国際特許分類】
【出願日】平成18年1月24日(2006.1.24)
【出願人】(000000376)オリンパス株式会社 (11,466)
【Fターム(参考)】
[ Back to top ]