
被検体情報取得装置およびその制御方法
【課題】画像表示速度と画像分解能を両立させる被検体情報取得装置を提供する。
【解決手段】被検体からの音響波を電気信号に変換する素子が第1の方向に配列された探触子と、探触子を第1の方向と交差する第2の方向に移動させる走査手段と、複数の電気信号を用いて求めた被検体内の各位置における音響波の強度に基づく音響信号を複数用いて、被検体の断層に対応する第1の画像データを第2の方向に沿って複数生成するとともに、複数の音響信号を用いて第2の画像データを生成する生成手段と、第1と第2の画像データに基づく画像を表示部に表示させる表示制御手段を有し、表示制御手段は、表示部に第1の画像データに基づく表示をさせ、被検体の同じ位置における第2の画像データが入力されると、第2の画像データに基づく表示に切り替える被検体情報取得装置を用いる。
【解決手段】被検体からの音響波を電気信号に変換する素子が第1の方向に配列された探触子と、探触子を第1の方向と交差する第2の方向に移動させる走査手段と、複数の電気信号を用いて求めた被検体内の各位置における音響波の強度に基づく音響信号を複数用いて、被検体の断層に対応する第1の画像データを第2の方向に沿って複数生成するとともに、複数の音響信号を用いて第2の画像データを生成する生成手段と、第1と第2の画像データに基づく画像を表示部に表示させる表示制御手段を有し、表示制御手段は、表示部に第1の画像データに基づく表示をさせ、被検体の同じ位置における第2の画像データが入力されると、第2の画像データに基づく表示に切り替える被検体情報取得装置を用いる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、被検体情報取得装置およびその制御方法に関する。
【背景技術】
【0002】
従来、医療画像診断に用いられる超音波診断装置において、超音波の送受信機能を有するトランスデューサを含んだ超音波探触子(プローブ)が用いられている。この超音波探触子から、超音波の合成波によって形成される超音波ビームを被検体に向けて送信すると、超音波ビームは被検体内部における音響インピーダンスが異なる領域、即ち、組織の境界において反射が起こる。この反射によって生じたエコー信号を受信して、エコー信号の強度に基づいて画像を再構成することにより、被検体内部の組織状況を超音波エコー画像として画面に再現することができる。
【0003】
特許文献1には、超音波探触子を機械的に走査して広い領域の3次元超音波画像を取得する方法が開示されている。すなわち、1次元配列探触子を素子の配列方向(以下ラテラル方向と言う)と直交ないし交差する方向(以下エレベーション方向と言う)に連続移動させながら超音波画像を取得する方法である。1次元配列探触子は超音波ビームの電子走査によって一つの断層スライス像を再構成することが出来る。従って、エレベーション方向の各位置において作成された断層スライス像を積み重ねることによって、機械走査領域全体の3次元超音波画像を取得することが出来る。この3次元画像取得法は速度的にもコスト的にも有利な方法である。
【0004】
一方、特許文献2では適応型信号処理により超音波イメージングの解像度を向上させる手段が開示されている。例えば、レーダーの分野で用いられている空間平均法を用いた適応型信号処理であるCAPON法がある。また、周波数領域干渉計法(FDI法:Frequency Domain Interferometry)と前述の適応型信号処理であるCAPON法とを組み合わせた手法もある。適応型信号処理を用いた場合、超音波イメージングにおける受信信号の周波数スペクトルを精度良く平坦化し、従来よりも飛躍的に空間分解能を向上させた超音波画像を取得することが出来る。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2009−28366号公報
【特許文献2】特開2010−183979号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、特許文献1に記載の従来例では、1次元配列探触子を用いた超音波ビームの電子走査によって画像再構成された一つの断層スライス像において、ラテラル方向の画像分解能に比較してエレベーション方向の画像分解能が大幅に低下するという問題があった。
【0007】
その第1の理由は、エレベーション方向の画素密度をある程度粗くせざるを得ないからである。なぜなら、探触子の機械走査を遅くして断層スライス面の走査ピッチを細かくすることで、エレベーション方向の画素密度を上げることはできるが、その場合には被検者の肉体的負担時間を増加させることになる。また第2の理由は、1次元配列探触子のエレベーション方向の実効的開口角が配列方向に比べて小さく、エレベーション方向の再構成分解能が劣化するからである。2次元配列探触子を用いればこれらの問題はある程度改善できるが、送受信素子数の増加により必要な電気回路規模が大きくなり、コスト的に実用
化が難しいという新たな問題が発生する。
【0008】
また、上記特許文献2に記載の従来例では、一つの断層スライス像(2次元超音波画像)に対してラテラル方向の画像分解能を向上させる手段を説明しているが、エレベーション方向に適用する場合にはより一層計算量が増えてしまうことが問題となる。すなわち、必要となる信号処理回路と画像メモリの規模が大きくなることでコスト的に装置への実装が困難となり、信号処理回路を実装した場合にも処理時間の大幅な遅延が考えられるので、リアルタイムで画像表示することは困難という問題が発生する。
【0009】
本発明は上記問題に鑑みてなされたものであり、その目的は、画像表示速度と画像分解能を両立させる被検体情報取得装置を提供することである。
【課題を解決するための手段】
【0010】
本発明は以下の構成を採用する。すなわち、被検体から伝播した音響波を受信して電気信号に変換する複数の素子が少なくとも第1の方向に配列された探触子と、前記探触子を、前記第1の方向と交差する第2の方向に移動させる走査手段と、複数の前記電気信号を用いて求めた被検体内の各位置における音響波の強度に基づく音響信号を複数用いて、被検体の断層に対応する第1の画像データを前記第2の方向に沿って複数生成するとともに、複数の前記音響信号を用いて第2の画像データを生成する、生成手段と、前記第1の画像データと前記第2の画像データとが入力され、被検体内の情報を示す画像を表示部に表示させる表示制御手段とを有し、前記表示制御手段は、前記表示部に前記第1の画像データに基づく表示をさせ、被検体の同じ位置における前記第2の画像データが入力されると、前記第1の画像データに基づく表示から前記第2の画像データに基づく表示に切り替えることを特徴とする被検体情報取得装置である。
【0011】
本発明はまた、以下の構成を採用する。すなわち、被検体から伝播した音響波を受信して電気信号に変換する複数の素子が少なくとも第1の方向に配列された探触子と、前記探触子を、前記第1の方向と交差する第2の方向に移動させる走査手段と、複数の前記電気信号を用いて求めた被検体内の各位置における音響波の強度に基づく音響信号を複数用いて、被検体の断層に対応する第1の画像データを前記第2の方向に沿って複数生成するとともに、複数の前記音響信号を用いて第2の画像データ及び第3の画像データを生成する生成手段と、前記第1、第2、及び第3の画像データが入力され、被検体内の情報を示す画像を表示部に表示させる表示制御手段と、を有し、前記表示制御手段は、前記表示部に前記第2の画像データに基づく表示をさせ、被検体の同じ位置における前記第3の画像データが入力されると、前記第2の画像データに基づく表示から前記第3の画像データに基づく表示に切り替えることを特徴とする被検体情報取得装置である。
【0012】
本発明はまた、以下の構成を採用する。すなわち、被検体から伝播した音響波を受信して電気信号に変換する複数の素子が少なくとも第1の方向に配列された探触子と、前記探触子を前記第1の方向と交差する第2の方向に移動させる走査手段と、複数の前記電気信号から求めた被検体内の各位置における音響波の強度に基づく音響信号を複数用いて画像データを生成する生成手段と、画像データに基づき被検体の画像を表示する表示部を有する被検体情報取得装置の制御方法であって、前記生成手段が、被検体の断層に対応する第1の画像データを前記第2の方向に沿って複数生成するステップと、前記表示部が、前記第1の画像データに基づく表示を行うステップと、前記生成手段が、複数の前記音響信号を用いて第2の画像データを生成するステップと、前記表示部が、前記第1の画像データに基づく表示から被検体の同じ位置における前記第2の画像データに基づく表示に切り替えるステップと、を有することを特徴とする被検体情報取得装置の制御方法である。
【発明の効果】
【0013】
本発明によれば、画像表示速度と画像分解能を両立させる被検体情報取得装置を提供することができる。
【図面の簡単な説明】
【0014】
【図1】本発明の超音波診断装置の全体構成を示す図。
【図2】従来例に係る、画像生成部の構成を示す図。
【図3】第1の実施例に係る、画像生成部と画像記憶部の構成を示す図。
【図4】整相加算回路の構成を示す図。
【図5】画像記憶部の構成を示す図。
【図6】加算演算回路の構成を示す図。
【図7】超音波探触子の機械的走査を示す図。
【図8】合成開口法の原理を示す図。
【図9】スライス面の合成開口法を示す図。
【図10】スライス像の出力タイミングを示す図。
【図11】3次元超音波画像の生成方法を示す図。
【図12】第2の実施例に係る、画像生成部と画像記憶部の構成を示す図。
【図13】適応型演算回路の制御フローを示す図。
【図14】参照信号合成ブロックの制御フローを示す図。
【図15】第2の実施例に係る、3次元超音波画像の生成方法を示す図。
【図16】第3の実施例に係る、3次元超音波画像の生成方法を示す図。
【発明を実施するための形態】
【0015】
以下、図面を参照しつつ、本発明の各構成をより詳細に説明する。
本発明の被検体情報取得装置とは、被検体に音響波を送信し、被検体内部で反射した音響波(エコー信号)を受信して、被検体情報を画像データとして取得する技術を利用した装置である。音響波とは一種の弾性波で、典型的には超音波であり、音波、超音波と呼ばれる弾性波を含む。探触子は、被検体内から伝播した音響波を受信する。取得される被検体内の情報とは、上述したように、被検体内部の組織の音響インピーダンスの違いを反映した情報である。
以下の説明では、代表的な被検体情報取得装置として、生体等の被検体を対象として診断を行う超音波診断装置を例にあげて記述を行う。
【0016】
<実施例1>
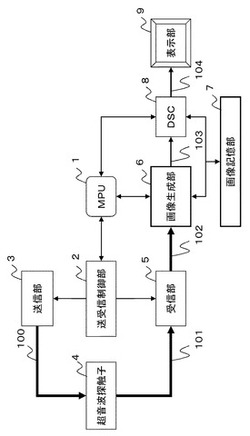
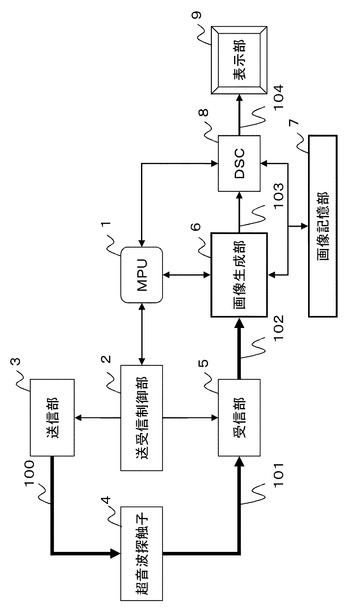
図1は、本発明の超音波診断装置の全体構成を示した図である。まず初めに、超音波診断装置の全体構成について説明すると、MPU(マイクロプロセッサユニット)1により装置全体の主制御が行われ、送受信制御部2でコントロールされる送信部3と受信部5に繋がった超音波探触子4によって、一連の送受信動作が行われる。超音波探触子4は、被検体や被検体を保持する保持部材等に接触させるように用いられ、被検体に向けて超音波を送信し受信する。超音波探触子4は、印加される駆動信号である送信アナログ信号100に基づいて超音波を送信すると共に、伝搬する超音波を受信して受信アナログ信号101を出力する複数のトランスデューサで構成されている。超音波探触子4は、1次元配列、或いは2次元配列で構成されたNチャンネルのトランスデューサアレイとなっている。トランスデューサアレイとは、超音波ビームが断層スライス面上を電子走査し、通常のBモードの超音波画像を作成されるものであればよい。具体的には1D、1.5D、1.75Dのトランスデューサアレイを用いることができる。また、2D構成のトランスデューサアレイであっても、画像を生成するために電子走査により二次元断面を走査できるものであればよい。超音波探触子4の電子走査としては、略平行移動で超音波ビームを平面上に電子走査するリニア走査などが用いられる。リニア走査は、電子走査による撮像幅が一定であり、超音波探触子4の近接部分でも広い撮像域を得られること、横方向分解能が撮像深度(プローブ・撮像対象接合面より測った深さ)によらないことなど利点がある。
【0017】
超音波探触子4は、例えばPZTに代表される圧電セラミックや、PVDFに代表される高分子圧電素子等の圧電性を有する材料(圧電体)の両端に電極を形成した振動子によって構成されている。なお、PZTとはチタン酸ジルコン酸鉛(lead zirconium titanate)であり、PVDFとはポリフッ化ビニリデン(PolyVinylidine DiFluoride)である。このような振動子の電極に、パルス状又は連続波の送信アナログ信号100を印加すると、圧電体は伸縮する。この伸縮により、それぞれのトランスデューサからパルス状又は連続波の超音波が発生し、これらの超音波の合成によって送信ビームが形成される。また、それぞれのトランスデューサは、伝播する超音波を受信することによって伸縮し、電気信号を発生する。これらの電気信号は、超音波の受信アナログ信号101として出力される。ここで、トランスデューサとして変換方式の異なる素子を用いても良い。例えば超音波を送信する素子として上記の振動子を用い、超音波を受信する素子として光検出方式のトランスデューサを用いることも可能である。光検出方式のトランスデューサとは、超音波を光信号に変換して検出するものであり、例えばファブリーペロー共振器やファイバブラッググレーティングによって構成されるものである。
【0018】
送受信制御部2は、MPU1のソフトウェアによってコントロールされ、入力操作部からの命令や情報に基づいて、送信部3、受信部5を各々制御する。送信部3は、超音波探触子4を構成するNチャンネルのトランスデューサに対して、それぞれNチャンネル分の送信アナログ信号100を供給する、パルサ駆動回路によって構成されている。受信部5は、まず、Nチャンネルのトランスデューサから出力された微弱な受信アナログ信号101に、初段のLNA増幅器でアナログ増幅処理を施す。受信部5は、続いて、TGC(Time Gain Compensation:時間利得補償)増幅器において更にアナログ増幅処理を施す。この増幅器の出力に対して、AAF(Anti Aliasing
Filter)で不要な周波数帯域の信号をカットし、高速サンプリング(CLOCK)のA/Dコンバータを用いてそれぞれのチャンネル毎にA/D変換処理を行う。その結果、受信デジタル信号に変換されたNチャンネルのエコー検出データ102が出力される。
【0019】
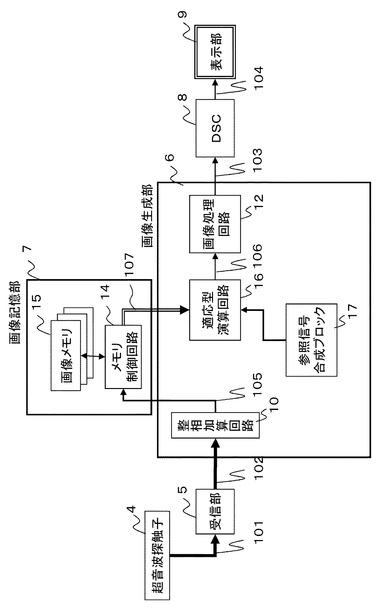
画像生成部6は、入力されたエコー検出データ102を位相整合処理、信号処理、画像生成を実行することでBモード画像と呼ばれる2次元画像データ103を出力する。DSC(デジタルスキャンコンバータ)8は、入力された2次元画像データ103(第1の画像データや第2の画像データ等)を画像記憶部7に一時書込み、水平同期周波数のタイミングに合わせてビデオ信号104として出力する表示制御手段である。表示部9は、ビデオ信号104が入力されることでBモード画像を表示する。
【0020】
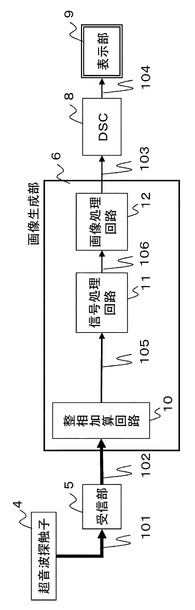
図2は、従来例に係る画像生成部6の構成を示す図である。受信部5から出力されたNチャンネルのエコー検出データ102は、受信フォーカス処理の基本機能であるラテラル方向の位相整合処理を整相加算回路10により実行し、加算されたRAWデータ105が出力される。つまり、整相加算回路10は、RAWデータ105は、複数の電気信号(エコー検出データ)を用いて整相加算処理を行い複数の音響信号を出力する。ラテラル方向は複数の素子を用いて電子走査を行う方向であり、1次元配列探触子においては、複数の素子の配列方向である。このラテラル方向が、本発明の第1の方向に相当する。信号処理回路11で、このRAWデータ105に包絡線検波やSTC(センシティビティ・タイム・ゲイン・コントロール)等の信号処理を施すことで、1次元表示データ106が生成される。1次元表示データ106はAモード画像と呼ばれる一走査線単位の表示データとなる。画像処理回路12が、Aモード画像を走査線(ライン)単位で順次保存しながら2次元データとなる断層スライス像に変換することで、Bモード画像と呼ばれる2次元画像データ103が出力される。この断層像である2次元画像データは、本発明の第1の画像デ
ータに相当する。つまり、音響信号を複数用いて、第1の画像データが第2の方向にそって複数生成される。
【0021】
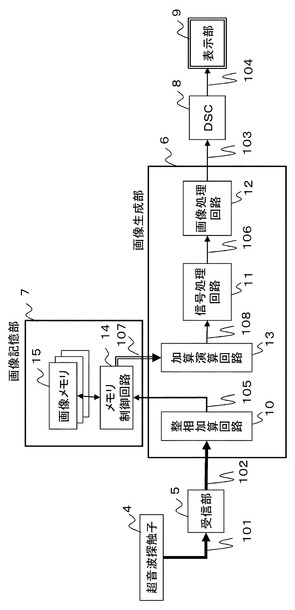
図3は、本発明の実施例1に係る画像生成部6と画像記憶部7の内部構成を示す図である。図2の従来例の構成と比較すると、画像メモリ15、メモリ制御回路14、加算演算回路13のブロックが新たに加わっている。画像メモリ15は複数RAWデータ107を一時保存しておく場所であり、メモリ制御回路14は、画像メモリ15に対する読み出し/書き込みメモリ領域をコントロールする。これらを備えていることにより、整相加算回路10で生成されたRAWデータ105の処理方法が異なっている。すなわち、保存された複数RAWデータ107を同時に参照するように加算演算回路13が動作する。第1の画像データとしての断層スライス像のデータは、図2と同様の処理、つまり、加算演算回路13は介さずに(スルーして)、RAWデータ105を用いて生成される。
【0022】
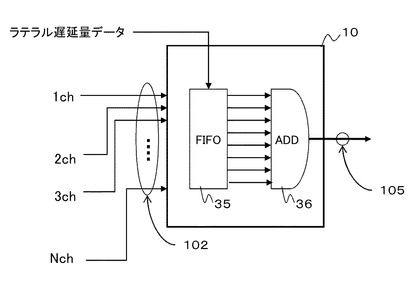
更に、各構成要素の動作について詳しく説明する。図4は、ラテラル方向に対する整相加算回路10の内部構成を示す図である。この回路は、A/Dコンバータ34から出力されたエコー検出データ102の位相整合するための遅延加算処理、即ち受信ビームフォーカスの加算処理を行う。MPU1から与えられるラテラル遅延量データに適応したフォーカス遅延時間を得るために、FIFOメモリ35を利用してNチャンネルのエコー検出データ102に所望のフォーカス遅延を与えた後、加算演算器36によってNチャンネル全ての加算演算を行う。その結果、所望の走査線に沿った複数の音響信号(被検体内の各位置における音響波の強度に対応する信号)を表す、位相整合した後のRAWデータ105が生成される。つまり、整相加算回路10は、RAWデータ105は、複数の電気信号(エコー検出データ)を用いて整相加算処理を行い複数の音響信号を出力する。
【0023】
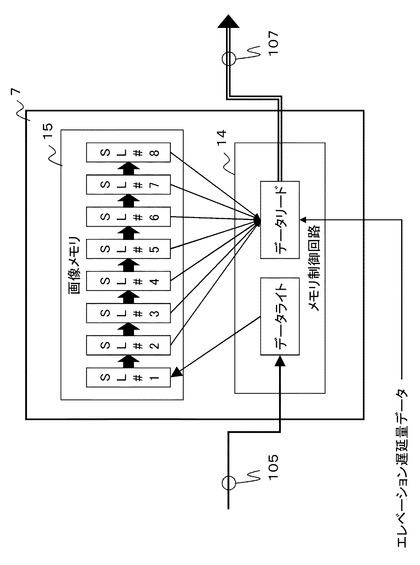
図5は、画像記憶部7の内部構成の一例を示した図で、本実施例の画像メモリ15は、8スライス分のデータが保存できるように構成されている。まず初めにSL#1に1スライス分のRAWデータが書き込まれたタイミングで、SL#1のスライスデータはSL#2に移動し、SL#2のスライスデータはSL#3に移動し、というように、順次データのシフト操作がスライス単位で行われる。最終的にはSL#1からSL#8までの8スライス分のデータを同時に保存しておくことができる。この中でSL#1については書き込み専用のメモリ領域として動作し、SL#2からSL#8までは読み出し専用のメモリ領域として動作している。一方、メモリ制御回路14は、ライトアドレス制御とリードアドレス制御を、各々非同期でコントロールする制御回路である。ここで、ライトアドレス制御は、画像メモリ15のSL#1へ対応したメモリアドレスにRAWデータ105を書き込む。また、リードアドレス制御は、SL#2からSL#8までに保存された7スライス分のデータから、MPU1で指示されたエレベーション遅延量データに対応したメモリアドレスの複数RAWデータ107を画像メモリ15から同時に読み出す。
【0024】
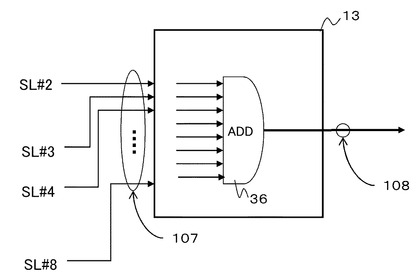
図6は、加算演算回路13の内部構成を示した図で、MPU1で指定したエレベーション遅延量データに応じて出力された複数RAWデータ107を加算処理することで、エレベーション方向に合成開口法を行った加算RAWデータ108を出力する回路である。エレベーション方向はラテラル方向と直交ないし交差する方向であり、本発明の第2の方向に相当する。ラテラル方向の位相整合処理を行う整相加算回路10と異なる点は、エレベーション方向の位相制御をメモリ制御回路14で行っているので、FIFOを持つことなくデータの加算処理だけを加算演算回路13で行っている点である。
【0025】
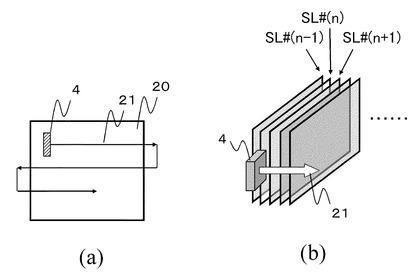
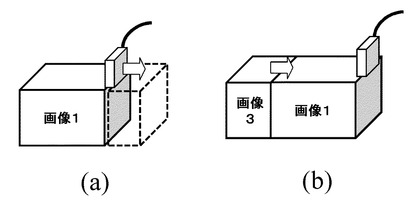
図7(a)は、1次元配列の超音波探触子4をエレベーション方向の移動経路21に沿って機械的に移動させ、広い検査領域20の3次元超音波画像を取得する動作を示した図である。超音波探触子1を等速で移動し、移動経路21上の各位置において前述の断層スライス像を繰り返し取得すれば、取得した断層スライス像を密に並べることにより検査領
域全体の3次元超音波画像とすることが出来る。
【0026】
図7(b)は、1次元配列探触子4がエレベーション方向の移動経路21に沿って連続移動しながら、断層スライス像を順に、SL#(n−1)、SL#(n)、SL#(n+1)と取得する時の走査手順を示したものである。各断層スライス像を構成する2次元画像データは、エレベーション方向に対して一定周期の間隔で出力される。この時、超音波探触子4は間欠的に移動するものであっても良いし、連続的に移動するものであっても良い。連続的に移動する場合、断層スライス像は厳密には移動方向と直交しないが、説明をわかりやすくするためにここでは直交しているものとする。
【0027】
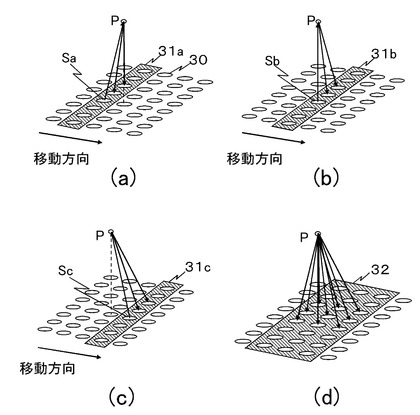
図8は、本発明の背景となる画像再構成の手法である合成開口法の原理を説明した図である。配列された小さな楕円図形30は各スライス面を走査するときの各送受信素子の位置を示し、点Pは3次元空間内の任意の注目点を示す。図8(a)は四角図形31aで囲った送受信素子群が(n−1)番目のスライス面を走査する時点を示したもので、中心部Saから発信した超音波ビームの一部がP点の方向にも伝播し、その反射波が四角図形31aの位置にある送受信素子によって受信される。図8(b)は探触子がn番目のスライス位置に移動して四角図形31bで囲った送受信素子群が中心部Sbから再び超音波ビームを発信し、その一部がP点の方向へも伝播してその反射波を四角図形31bの位置にある送受信素子群が受信する様子を示している。図8(c)は探触子が(n+1)番目のスライス位置に移動して四角図形31cで囲った送受信素子群が中心部Scから再び超音波ビームを発信し、その一部がP点の方向へも伝播してその反射波を四角図形31cの位置にある送受信素子群が受信する様子を示す。
【0028】
各スライス面での送受信時点はそれぞれ異なっているが、ここで送信から受信までの時間を伝播距離と音速から計算し、受信素子ごとに加算すべき信号の受信時刻を調整して同一のP点からの反射信号を加算するようにする。そうすれば、図8(d)のように四角図形32の位置にある送受信素子群からなる仮想的2次元探触子で受信した信号を2次元整相加算で計算した場合と等価な結果を得ることが出来る。このようにすると、1次元配列の超音波探触子を用いているにもかかわらず、2次元配列の超音波探触子を用いた場合に近い解像度の超音波画像を取得することができ、特にエレベーション方向の解像度を向上させることが可能になる。このような超音波発信時刻の異なる受信信号を合成して受信開口を実質的に大きくした場合と同等な解像度を得る方法は合成開口法として知られている。合成開口により得られたデータは、本実施例においては、第2の画像データに相当する。
【0029】
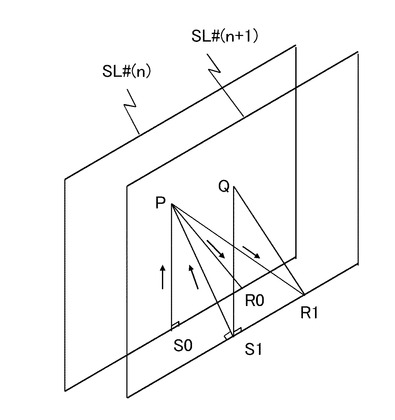
図9は、第1の実施例における画像再構成として、スライス面の合成開口法を説明する図である。説明を簡単にするために、注目点Pはスライス面SL#(n)の面内にあるものとする。送受信素子群の中心S0から垂直に発した超音波ビームはP点において反射し、R0位置の送受信素子で受信される。次に探触子はスライス面SL#(n+1)の位置に移動し、S0に対応する位置S1から再び超音波ビームを発信する。超音波ビームは垂直方向に発信されるが、その一部が断層スライス面SL#(n)内のP点の方向にも伝播し、P点で反射された超音波がR0点に対応する点R1で受信される。前述の合成開口法の整相加算は、R0での受信信号とR1での受信信号とを、それぞれ発信からP点で反射して受信するまでの伝播時間に相当する受信時間のずれを調整して加算すれば実現できる。
【0030】
次に、点S1からスライス面SL#(n+1)内の垂直方向にPまでと同じ距離の点Qを考える。この場合、点S1,P,R1からなる三角形と点S1,Q,R1からなる三角形とは明らかに合同なので、S1からP点を経由してR1に到達する時間とS1からQ点を経由してR1に到達する時間は同じになる。この関係はR1位置の送受信素子だけでな
く同じ送受信素子群の他の受信素子に関しても全く同じになるから、スライス面SL#(n+1)の位置においてP点を焦点とした1次元整相加算結果とQ点を焦点とした整相加算結果とは全く同じ加算信号となる。したがって、P点に対する2次元整相加算は、一旦スライス面ごとに1次元整相加算を行って点Pと点Qの整相加算信号を求め、次にエレベーション方向に適切な1次元整相加算を行って点Pと点Qの整相加算信号を加算すれば良いことがわかる。
【0031】
すなわち、図3で示した第1の実施例における画像生成部6は、この原理をリアルタイム処理で実現するもので、整相加算回路10から出力されるRAWデータ105はメモリ制御回路14を介して画像メモリ15に一時保存する。加算演算回路13では、保存された複数RAWデータ107の中から対応する遅延量のRAWデータを、メモリ制御回路14を介して参照し、合成開口法に基づくエレベーション方向の整相加算を実行する。これにより、図8に示した2次元整相加算を実行した場合と比べて少ない回路規模で等価な効果を得ている。
【0032】
図9に示した合成開口法を用いた場合に、基本原理としては参照するスライス面数が多くなるほど、整相加算後のデータ精度を向上させることは明白である。すなわち、解像度を向上させるための必要条件としては、まず、整相加算回路10から出力されるRAWデータ105を保存する画像メモリ15の領域を画像記憶部7の中でなるべく多く確保する事がある。さらに、加算演算回路13が同時に多くの複数RAWデータ107を使って合成開口処理を行えるよう速度を向上させる事がある。そこで、双方の回路規模の兼ね合いが必要となってくる。
【0033】
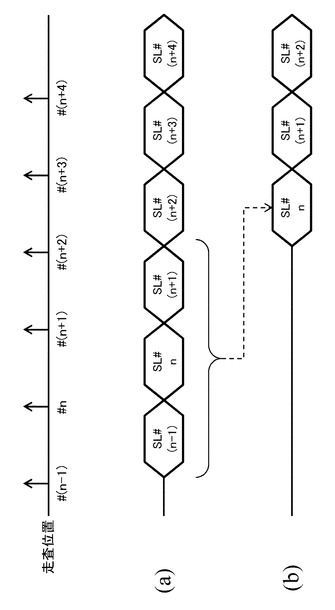
図10は、画像生成部6で生成される2次元画像データ103が、超音波探触子4の走査位置に対して出力されるタイミングを示した図である。従来の画像生成部6では図10(a)に示した出力タイミングのように、エコー検出データ102を取得してから2次元画像データ103を生成するまでの画像生成に時間遅延が無かった。そのため、断層スライス像のSL#(n−1)からSL#(n+4)は、超音波探触子4の走査位置の#(n−1)から#(n+4)に対してリアルタイムに出力されている。
【0034】
一方、第1の実施例を示した図10(b)の出力タイミングでは、画像記憶部7に3枚の断層スライス像を一時保存し、3枚の断層スライス像を使った合成開口による加算演算を実施して2次元画像データ103を生成している。そのため、合成開口に必要となる複数の断層スライス像が集まるまでの待ち時間が生じてしまう。すなわち(b)の例では、4スライス目のSL#(n+2)が取り込まれる際に、保持されているSL#(n−1)、SL#n、SL#(n+1)の断層スライス像を使って合成開口を実施する。そのため、超音波探触子4の走査位置が#(n+2)になった段階でSL#1の2次元画像データ103が生成されるといった出力タイミングのずれが発生する。
【0035】
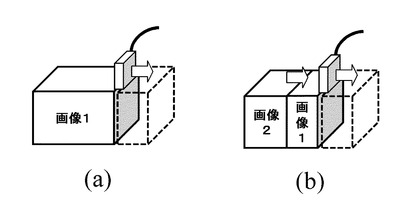
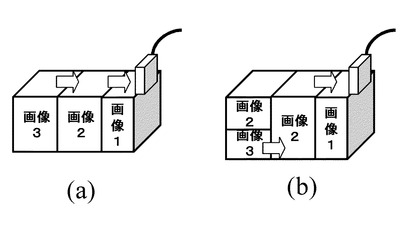
図11は、画像表示部9でリアルタイム表示される超音波画像の様子を示した図であるが、前記の出力タイミングずれがどのように影響するかを説明する。図11(a)の従来の出力タイミングでは超音波探触子4の走査位置に合わせて断層スライス像が生成され、スライス像を重ねて表示される3次元超音波画像1の領域も探触子の動きに同期して生成されている。
図11(b)の本実施例の出力タイミングでは、超音波探触子4の走査位置に対して合成開口を行うための時間遅延が発生するため、走査している位置から遅れて画像2が表示される。この時、従来の断層スライス像である画像1は走査位置に合わせてリアルタイムに表示しておき、合成開口の画像生成が終わった段階で画像2に切り替えていくことができる。これにより、走査の直後から待ち時間なく断層スライス像を提示できるとともに、合成開口の演算が終わってからより高精細な画像を提示できるので、リアルタイムな画像
表示と高精細な画像表示をともに達成することが可能になる。すなわち、画像表示速度と画像分解能を両立できる。
【0036】
<実施例2>
図12は、本発明の実施例2に係る画像生成部6と画像記憶部7の内部構成を示す図である。図3の第1の実施例の構成と比較すると、加算演算回路13と信号処理回路11の代わりに適応型演算回路16と参照信号合成ブロック17のブロックが新たに加わり、保存された複数RAWデータ107を参照して適応型信号処理を実行する構成となっている。ただし、第1の画像データとしての断層スライス像のデータは、図2と同様の処理、つまり、適応型演算回路16は介さずに(スルーして)、RAWデータ105を用いて生成される。
【0037】
ここで、適応型信号処理の概略動作について説明する。レーダーの分野においては、目標距離を高精度に推定する手法として、適応型信号処理が知られている。Proc.Acoustics,Speech Signal Process.,pp.489−492(Mar.2005)には、このような適応型信号処理を超音波エコー画像データを生成する際に用いて解像度を向上させた手法が記載されている。また、深さ方向の空間分解能を向上する技術として、周波数領域干渉計法(FDI法:Frequency Domain Interferometry)と適応型信号処理との両方を行う手法も知られている。Conf Proc IEEE Eng Med Biol Soc.2010;1:5298−5301.や特許文献2には、探触子から出力される電気信号を用いて、FDI法と、適応型信号処理であるCAPON法と、を行い、血管壁の層構造を画像化した結果が示されている。
【0038】
適応型信号処理は、受信信号に応じて、その処理パラメータを適応的に変化させる。適応型信号処理の一つであるCAPON法は、複数の入力信号に対して、注目位置に関する感度を固定した状態で電力を最小化するように処理する方法である。
FDI法は受信信号(探触子から出力される電気信号)を周波数ごとに分解し、複数の周波数成分の位相情報を使用して注目位置における受信電力を推定する方法である。ある基準位置で位相が揃っている複数の周波数を考えた場合、その基準位置からの距離と波数との積が位相の変化量と比例することが分かる。つまりある注目距離を設定した時に、基準位置から注目距離までの距離と、周波数つまり波数とが既知であれば、どれだけ位相が変化するかを算出できることになる。この変化する位相分をそれぞれの周波数の受信信号に与え、足し合わせることで注目距離における受信電力を推定できる。
FDI法と適応型信号処理とを組み合わせることは、各周波数成分に分解された受信信号に対して、あらかじめ決定された位相変化量・重みではなく、適応型信号処理によって信号に応じて算出された位相変化量・重みを用いて、注目位置における受信電力を推定することになる。
本発明においては、適応型信号処理としてCAPON法だけでなく、MUSIC法やESPRIT法などを用いても良い。
【0039】
一般的な超音波診断装置は先述したように、受信波形の包絡線を取得することで画像を形成する。ここにFDI法及びCAPON法を適用することでさらに解像度を上げる場合、FDIの処理レンジ内において複数の反射層が存在することが想定される。大気観測用レーダーでは観測時間を十分長くすることにより複数の反射層からの複数の反射波間の相関を抑圧可能であるが、医用超音波イメージングにおいては1処理レンジの観測時間が短く、複数の反射波間の相関を抑圧することができない。そのため、近接した反射層からの複数の反射波は高い相関性を有していることが考えられる。
【0040】
このような高い相関性を有する複数の反射波形に対してCAPON法やMUSIC法な
どの適応型信号処理をそのまま適用すると、所望の信号を打ち消すなどの予期しない動作を行うことが知られている。このような状況に対して、周波数平均法を適用することで、FDI法及びCAPON法が動作することが確認されているので、医用超音波イメージングにFDI及びCAPON法を適用する場合には、周波数平均法を使用するのが望ましい。
【0041】
このように特許文献2によれば、周波数特性の違う観察対象物が存在する場合であっても、基準信号を合成することによって対象物の周波数特性を考慮した演算用参照信号を生成することができる。その結果、適応型信号処理による深さ方向の空間分解能の向上が可能となる。
【0042】
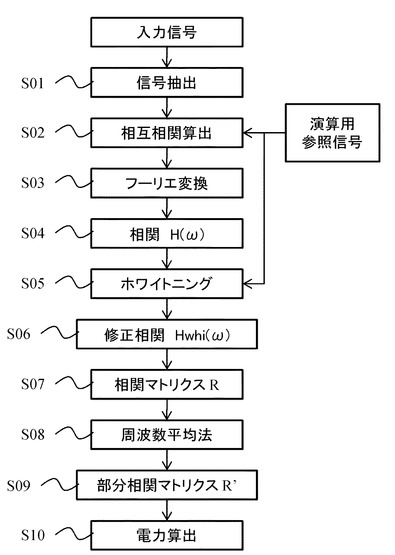
図13は、適応型演算回路16の処理について説明するフローチャートである。適応型演算回路16は、画像記憶部7から入力された画像信号から1回で処理する時間分、つまり処理レンジ分の信号を抽出する(S01)。その後、参照信号合成ブロック17から入力された複数の演算用参照信号との相互相関を算出する(S02)。ここでは複数の演算用参照信号のうち1種類に対する処理を例示的に示すが、実際には入力された複数の演算用参照信号に関して同様の処理を行う。相互相関をフーリエ変換することで周波数ごとの相関H(ω)が求まる(S03、S04)。
【0043】
次に、数式1によって演算用参照信号を用いてホワイトニング処理を行う(S05)。参照信号をg(t)、そのフーリエ変換をG(ω)とすると、数式(1)により、ホワイトニングされ、周波数スペクトルが平坦化された信号である修正相関Hwhi(ω)が算出できる(S06)。ただし、ηは雑音電力である。
【数1】

【0044】
次に、平坦化された信号に対して周波数領域干渉計法および周波数平均法を適用する。すなわち、数式(2)で表せるi、j成分を有する相関マトリクスRを形成する(S07)。
【数2】
【0045】
次に、数式(3)で周波数平均法を用いて部分相関マトリクスR’を算出する(S08、S09)。そして、このようにして求めた部分相関マトリクスR’を用いて深さ方向の電力分布P(r)を推定する(S10)。ここでCは注目深さrに対する拘束ベクトルであり、knはn番目の周波数に対応する波数である。以上の処理によって、複数の演算用参照信号に対応した深さ方向に関する複数の電力分布が算出される。
【数3】
【0046】
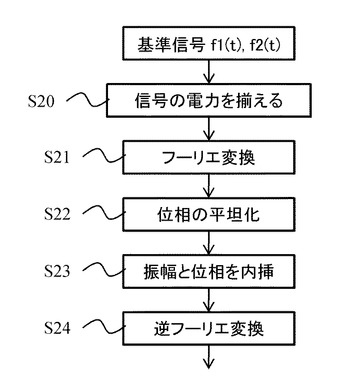
図14は、参照信号合成ブロック17における処理を説明するフローチャートである。ここでは2種類の基準信号f1(t)、f2(t)を内挿(合成)することで演算用参照
信号を作成する例を説明する。なお演算用参照信号の作成に用いられる基準信号は、予め装置内のメモリに格納されている。まず参照信号合成ブロック17は、基準信号f1(t)、f2(t)の電力を揃える(S20)。
【0047】
次に2種類の基準信号をフーリエ変換し位相φ1(f)、φ2(f)を求める(S21)。φ’(f)=φ(f)−afとした時のΣ(φ’(f))2を最小にするaoptをそれぞれの基準信号に対して探索する。それぞれのaoptの場合の基準信号のφ’(f)を求めることで、位相を平坦化する(S22)。
【0048】
次に、数式(4)で所定の内挿率(内挿係数ともいう。)αを用いて振幅と位相とを内挿し、合成したREF3(f)を算出する(S23)。なお内挿率αは、0≦α≦1を満たす任意の値である。ここでREF1(f)、REF2(f)はそれぞれ電力補正、位相補正後のf1(t)、f2(t)の周波数成分である。
【数4】
【0049】
最後に、REF3(f)を逆フーリエ変換して演算用参照信号の波形を求める(S24)。なお、この際に信号電力が一定になるよう振幅補正を行うことが望ましい。参照信号合成ブロック17は、内挿率αを変化させることで、複数の内挿率αに対応する複数の演算用参照信号を求め、適応型演算回路16へ出力する。内挿率αの値やその変化のステップについては適宜設定することができる。
【0050】
以上のような適応型信号処理を行う場合は画像生成までのプロセスが複雑になる。その結果、第1の実施例で用いた合成開口処理の整相加算に比べると画像が生成されるまでの処理時間が更に長くなるため、出力タイミングのずれが更に増加する。適応型信号処理により得られたデータは、本実施例においては、第2の画像データに相当する。
【0051】
図15は、第2の実施例において画像表示部9でリアルタイム表示される超音波画像の様子を示した図であり、前記の出力タイミングずれがどのように影響するかを説明する。図15(a)の出力タイミングでは超音波探触子4の走査位置に合わせて断層スライス像が生成され、スライス像を重ねて表示される画像1の領域も探触子の動きに同期して生成されている。
図15(b)の出力タイミングでは、超音波探触子4の走査位置に対して適応型信号処理を行うための時間遅延が発生するため、走査が完了した後に遅れて適応型信号処理の画像3が表示される状況もある。この時、従来の断層スライス像の画像1は走査位置に合わせてリアルタイムに表示し、適応型信号処理の画像3が生成された段階で画像を切り替えていくことも可能である。これにより、走査の直後から待ち時間なく断層スライス像を提示できるとともに、適応型信号処理の演算が終わってからより高精細な画像を提示できるので、リアルタイムな画像表示と高精細な画像表示をともに達成することが可能になる。すなわち、画像表示速度と画像分解能を両立できる。
【0052】
<実施例3>
第3の実施例では、第1と第2の実施例で説明した合成開口処理と適応型信号処理の2系統の演算回路を同時に実装した場合について説明する。上記2系統の演算回路における出力タイミングについては、予め取り込む断層スライス像のデータ量で決まる合成開口処理の演算回路に比べて、適応型信号処理を使った演算回路の方が処理に時間がかかるので
、画像生成に対する時間ずれが発生する。
【0053】
図16は、第3の実施例において画像表示部9でリアルタイム表示される超音波画像の様子を示した図である。前記2系統の出力タイミングずれがどのように影響するかを説明すると、図16(a)の出力タイミングでは、超音波探触子4の走査位置に合わせて断層スライス像が生成され、画像1の領域も探触子の動きに同期して表示される。その後、合成開口処理によって生成された画像2に置き換えられて表示され、更に遅れて適応型信号処理で生成された画像3に置き換えられて表示される。
【0054】
また図16(b)の出力タイミングでは、画像1と画像2の出力タイミングは図16(a)と同じだが、画像3を表示する場合に3次元データの位置を領域限定した場合を示している。例えば、適応型信号処理を用いた方法は距離方向の解像度を向上させることはできるが、探触子からの距離が近い部分などでは単純な開口制御による画像2の方が高解像の場合もある。そのような場合は浅い部分(所定の深度以浅の部分)は画像2のまま続行し、深い部分だけを画像3に切り替えて表示する方が、3次元の超音波画像として優れたものとなる。このとき、画像2と画像3を切り替える所定の深度は、実験により得られた所定の値を用いることができる。すなわち、表示する画像の切換え方法は、時系列に切り替えるだけでなく領域別に切り替えていくことも可能であり、表示の組み合わせ方法については本実施例での制限はない。本実施例においては、合成開口により得られたデータが第2の画像データに、適応型信号処理により得られたデータが第3の画像データに相当する。
【0055】
以上のように本実施例に従えば、1次元配列探触子をエレベーション方向に連続移動させながら取得した断層スライス像を使って3次元超音波画像を生成する超音波診断装置において、画像表示速度を損なわずに段階的な画像生成を行える。同時に、エレベーション方向の画像分解能を向上させることができる。
【符号の説明】
【0056】
1:MPU(マイクロプロセッサユニット)、4:超音波探触子、6:画像生成部、9:表示部
【技術分野】
【0001】
本発明は、被検体情報取得装置およびその制御方法に関する。
【背景技術】
【0002】
従来、医療画像診断に用いられる超音波診断装置において、超音波の送受信機能を有するトランスデューサを含んだ超音波探触子(プローブ)が用いられている。この超音波探触子から、超音波の合成波によって形成される超音波ビームを被検体に向けて送信すると、超音波ビームは被検体内部における音響インピーダンスが異なる領域、即ち、組織の境界において反射が起こる。この反射によって生じたエコー信号を受信して、エコー信号の強度に基づいて画像を再構成することにより、被検体内部の組織状況を超音波エコー画像として画面に再現することができる。
【0003】
特許文献1には、超音波探触子を機械的に走査して広い領域の3次元超音波画像を取得する方法が開示されている。すなわち、1次元配列探触子を素子の配列方向(以下ラテラル方向と言う)と直交ないし交差する方向(以下エレベーション方向と言う)に連続移動させながら超音波画像を取得する方法である。1次元配列探触子は超音波ビームの電子走査によって一つの断層スライス像を再構成することが出来る。従って、エレベーション方向の各位置において作成された断層スライス像を積み重ねることによって、機械走査領域全体の3次元超音波画像を取得することが出来る。この3次元画像取得法は速度的にもコスト的にも有利な方法である。
【0004】
一方、特許文献2では適応型信号処理により超音波イメージングの解像度を向上させる手段が開示されている。例えば、レーダーの分野で用いられている空間平均法を用いた適応型信号処理であるCAPON法がある。また、周波数領域干渉計法(FDI法:Frequency Domain Interferometry)と前述の適応型信号処理であるCAPON法とを組み合わせた手法もある。適応型信号処理を用いた場合、超音波イメージングにおける受信信号の周波数スペクトルを精度良く平坦化し、従来よりも飛躍的に空間分解能を向上させた超音波画像を取得することが出来る。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2009−28366号公報
【特許文献2】特開2010−183979号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、特許文献1に記載の従来例では、1次元配列探触子を用いた超音波ビームの電子走査によって画像再構成された一つの断層スライス像において、ラテラル方向の画像分解能に比較してエレベーション方向の画像分解能が大幅に低下するという問題があった。
【0007】
その第1の理由は、エレベーション方向の画素密度をある程度粗くせざるを得ないからである。なぜなら、探触子の機械走査を遅くして断層スライス面の走査ピッチを細かくすることで、エレベーション方向の画素密度を上げることはできるが、その場合には被検者の肉体的負担時間を増加させることになる。また第2の理由は、1次元配列探触子のエレベーション方向の実効的開口角が配列方向に比べて小さく、エレベーション方向の再構成分解能が劣化するからである。2次元配列探触子を用いればこれらの問題はある程度改善できるが、送受信素子数の増加により必要な電気回路規模が大きくなり、コスト的に実用
化が難しいという新たな問題が発生する。
【0008】
また、上記特許文献2に記載の従来例では、一つの断層スライス像(2次元超音波画像)に対してラテラル方向の画像分解能を向上させる手段を説明しているが、エレベーション方向に適用する場合にはより一層計算量が増えてしまうことが問題となる。すなわち、必要となる信号処理回路と画像メモリの規模が大きくなることでコスト的に装置への実装が困難となり、信号処理回路を実装した場合にも処理時間の大幅な遅延が考えられるので、リアルタイムで画像表示することは困難という問題が発生する。
【0009】
本発明は上記問題に鑑みてなされたものであり、その目的は、画像表示速度と画像分解能を両立させる被検体情報取得装置を提供することである。
【課題を解決するための手段】
【0010】
本発明は以下の構成を採用する。すなわち、被検体から伝播した音響波を受信して電気信号に変換する複数の素子が少なくとも第1の方向に配列された探触子と、前記探触子を、前記第1の方向と交差する第2の方向に移動させる走査手段と、複数の前記電気信号を用いて求めた被検体内の各位置における音響波の強度に基づく音響信号を複数用いて、被検体の断層に対応する第1の画像データを前記第2の方向に沿って複数生成するとともに、複数の前記音響信号を用いて第2の画像データを生成する、生成手段と、前記第1の画像データと前記第2の画像データとが入力され、被検体内の情報を示す画像を表示部に表示させる表示制御手段とを有し、前記表示制御手段は、前記表示部に前記第1の画像データに基づく表示をさせ、被検体の同じ位置における前記第2の画像データが入力されると、前記第1の画像データに基づく表示から前記第2の画像データに基づく表示に切り替えることを特徴とする被検体情報取得装置である。
【0011】
本発明はまた、以下の構成を採用する。すなわち、被検体から伝播した音響波を受信して電気信号に変換する複数の素子が少なくとも第1の方向に配列された探触子と、前記探触子を、前記第1の方向と交差する第2の方向に移動させる走査手段と、複数の前記電気信号を用いて求めた被検体内の各位置における音響波の強度に基づく音響信号を複数用いて、被検体の断層に対応する第1の画像データを前記第2の方向に沿って複数生成するとともに、複数の前記音響信号を用いて第2の画像データ及び第3の画像データを生成する生成手段と、前記第1、第2、及び第3の画像データが入力され、被検体内の情報を示す画像を表示部に表示させる表示制御手段と、を有し、前記表示制御手段は、前記表示部に前記第2の画像データに基づく表示をさせ、被検体の同じ位置における前記第3の画像データが入力されると、前記第2の画像データに基づく表示から前記第3の画像データに基づく表示に切り替えることを特徴とする被検体情報取得装置である。
【0012】
本発明はまた、以下の構成を採用する。すなわち、被検体から伝播した音響波を受信して電気信号に変換する複数の素子が少なくとも第1の方向に配列された探触子と、前記探触子を前記第1の方向と交差する第2の方向に移動させる走査手段と、複数の前記電気信号から求めた被検体内の各位置における音響波の強度に基づく音響信号を複数用いて画像データを生成する生成手段と、画像データに基づき被検体の画像を表示する表示部を有する被検体情報取得装置の制御方法であって、前記生成手段が、被検体の断層に対応する第1の画像データを前記第2の方向に沿って複数生成するステップと、前記表示部が、前記第1の画像データに基づく表示を行うステップと、前記生成手段が、複数の前記音響信号を用いて第2の画像データを生成するステップと、前記表示部が、前記第1の画像データに基づく表示から被検体の同じ位置における前記第2の画像データに基づく表示に切り替えるステップと、を有することを特徴とする被検体情報取得装置の制御方法である。
【発明の効果】
【0013】
本発明によれば、画像表示速度と画像分解能を両立させる被検体情報取得装置を提供することができる。
【図面の簡単な説明】
【0014】
【図1】本発明の超音波診断装置の全体構成を示す図。
【図2】従来例に係る、画像生成部の構成を示す図。
【図3】第1の実施例に係る、画像生成部と画像記憶部の構成を示す図。
【図4】整相加算回路の構成を示す図。
【図5】画像記憶部の構成を示す図。
【図6】加算演算回路の構成を示す図。
【図7】超音波探触子の機械的走査を示す図。
【図8】合成開口法の原理を示す図。
【図9】スライス面の合成開口法を示す図。
【図10】スライス像の出力タイミングを示す図。
【図11】3次元超音波画像の生成方法を示す図。
【図12】第2の実施例に係る、画像生成部と画像記憶部の構成を示す図。
【図13】適応型演算回路の制御フローを示す図。
【図14】参照信号合成ブロックの制御フローを示す図。
【図15】第2の実施例に係る、3次元超音波画像の生成方法を示す図。
【図16】第3の実施例に係る、3次元超音波画像の生成方法を示す図。
【発明を実施するための形態】
【0015】
以下、図面を参照しつつ、本発明の各構成をより詳細に説明する。
本発明の被検体情報取得装置とは、被検体に音響波を送信し、被検体内部で反射した音響波(エコー信号)を受信して、被検体情報を画像データとして取得する技術を利用した装置である。音響波とは一種の弾性波で、典型的には超音波であり、音波、超音波と呼ばれる弾性波を含む。探触子は、被検体内から伝播した音響波を受信する。取得される被検体内の情報とは、上述したように、被検体内部の組織の音響インピーダンスの違いを反映した情報である。
以下の説明では、代表的な被検体情報取得装置として、生体等の被検体を対象として診断を行う超音波診断装置を例にあげて記述を行う。
【0016】
<実施例1>
図1は、本発明の超音波診断装置の全体構成を示した図である。まず初めに、超音波診断装置の全体構成について説明すると、MPU(マイクロプロセッサユニット)1により装置全体の主制御が行われ、送受信制御部2でコントロールされる送信部3と受信部5に繋がった超音波探触子4によって、一連の送受信動作が行われる。超音波探触子4は、被検体や被検体を保持する保持部材等に接触させるように用いられ、被検体に向けて超音波を送信し受信する。超音波探触子4は、印加される駆動信号である送信アナログ信号100に基づいて超音波を送信すると共に、伝搬する超音波を受信して受信アナログ信号101を出力する複数のトランスデューサで構成されている。超音波探触子4は、1次元配列、或いは2次元配列で構成されたNチャンネルのトランスデューサアレイとなっている。トランスデューサアレイとは、超音波ビームが断層スライス面上を電子走査し、通常のBモードの超音波画像を作成されるものであればよい。具体的には1D、1.5D、1.75Dのトランスデューサアレイを用いることができる。また、2D構成のトランスデューサアレイであっても、画像を生成するために電子走査により二次元断面を走査できるものであればよい。超音波探触子4の電子走査としては、略平行移動で超音波ビームを平面上に電子走査するリニア走査などが用いられる。リニア走査は、電子走査による撮像幅が一定であり、超音波探触子4の近接部分でも広い撮像域を得られること、横方向分解能が撮像深度(プローブ・撮像対象接合面より測った深さ)によらないことなど利点がある。
【0017】
超音波探触子4は、例えばPZTに代表される圧電セラミックや、PVDFに代表される高分子圧電素子等の圧電性を有する材料(圧電体)の両端に電極を形成した振動子によって構成されている。なお、PZTとはチタン酸ジルコン酸鉛(lead zirconium titanate)であり、PVDFとはポリフッ化ビニリデン(PolyVinylidine DiFluoride)である。このような振動子の電極に、パルス状又は連続波の送信アナログ信号100を印加すると、圧電体は伸縮する。この伸縮により、それぞれのトランスデューサからパルス状又は連続波の超音波が発生し、これらの超音波の合成によって送信ビームが形成される。また、それぞれのトランスデューサは、伝播する超音波を受信することによって伸縮し、電気信号を発生する。これらの電気信号は、超音波の受信アナログ信号101として出力される。ここで、トランスデューサとして変換方式の異なる素子を用いても良い。例えば超音波を送信する素子として上記の振動子を用い、超音波を受信する素子として光検出方式のトランスデューサを用いることも可能である。光検出方式のトランスデューサとは、超音波を光信号に変換して検出するものであり、例えばファブリーペロー共振器やファイバブラッググレーティングによって構成されるものである。
【0018】
送受信制御部2は、MPU1のソフトウェアによってコントロールされ、入力操作部からの命令や情報に基づいて、送信部3、受信部5を各々制御する。送信部3は、超音波探触子4を構成するNチャンネルのトランスデューサに対して、それぞれNチャンネル分の送信アナログ信号100を供給する、パルサ駆動回路によって構成されている。受信部5は、まず、Nチャンネルのトランスデューサから出力された微弱な受信アナログ信号101に、初段のLNA増幅器でアナログ増幅処理を施す。受信部5は、続いて、TGC(Time Gain Compensation:時間利得補償)増幅器において更にアナログ増幅処理を施す。この増幅器の出力に対して、AAF(Anti Aliasing
Filter)で不要な周波数帯域の信号をカットし、高速サンプリング(CLOCK)のA/Dコンバータを用いてそれぞれのチャンネル毎にA/D変換処理を行う。その結果、受信デジタル信号に変換されたNチャンネルのエコー検出データ102が出力される。
【0019】
画像生成部6は、入力されたエコー検出データ102を位相整合処理、信号処理、画像生成を実行することでBモード画像と呼ばれる2次元画像データ103を出力する。DSC(デジタルスキャンコンバータ)8は、入力された2次元画像データ103(第1の画像データや第2の画像データ等)を画像記憶部7に一時書込み、水平同期周波数のタイミングに合わせてビデオ信号104として出力する表示制御手段である。表示部9は、ビデオ信号104が入力されることでBモード画像を表示する。
【0020】
図2は、従来例に係る画像生成部6の構成を示す図である。受信部5から出力されたNチャンネルのエコー検出データ102は、受信フォーカス処理の基本機能であるラテラル方向の位相整合処理を整相加算回路10により実行し、加算されたRAWデータ105が出力される。つまり、整相加算回路10は、RAWデータ105は、複数の電気信号(エコー検出データ)を用いて整相加算処理を行い複数の音響信号を出力する。ラテラル方向は複数の素子を用いて電子走査を行う方向であり、1次元配列探触子においては、複数の素子の配列方向である。このラテラル方向が、本発明の第1の方向に相当する。信号処理回路11で、このRAWデータ105に包絡線検波やSTC(センシティビティ・タイム・ゲイン・コントロール)等の信号処理を施すことで、1次元表示データ106が生成される。1次元表示データ106はAモード画像と呼ばれる一走査線単位の表示データとなる。画像処理回路12が、Aモード画像を走査線(ライン)単位で順次保存しながら2次元データとなる断層スライス像に変換することで、Bモード画像と呼ばれる2次元画像データ103が出力される。この断層像である2次元画像データは、本発明の第1の画像デ
ータに相当する。つまり、音響信号を複数用いて、第1の画像データが第2の方向にそって複数生成される。
【0021】
図3は、本発明の実施例1に係る画像生成部6と画像記憶部7の内部構成を示す図である。図2の従来例の構成と比較すると、画像メモリ15、メモリ制御回路14、加算演算回路13のブロックが新たに加わっている。画像メモリ15は複数RAWデータ107を一時保存しておく場所であり、メモリ制御回路14は、画像メモリ15に対する読み出し/書き込みメモリ領域をコントロールする。これらを備えていることにより、整相加算回路10で生成されたRAWデータ105の処理方法が異なっている。すなわち、保存された複数RAWデータ107を同時に参照するように加算演算回路13が動作する。第1の画像データとしての断層スライス像のデータは、図2と同様の処理、つまり、加算演算回路13は介さずに(スルーして)、RAWデータ105を用いて生成される。
【0022】
更に、各構成要素の動作について詳しく説明する。図4は、ラテラル方向に対する整相加算回路10の内部構成を示す図である。この回路は、A/Dコンバータ34から出力されたエコー検出データ102の位相整合するための遅延加算処理、即ち受信ビームフォーカスの加算処理を行う。MPU1から与えられるラテラル遅延量データに適応したフォーカス遅延時間を得るために、FIFOメモリ35を利用してNチャンネルのエコー検出データ102に所望のフォーカス遅延を与えた後、加算演算器36によってNチャンネル全ての加算演算を行う。その結果、所望の走査線に沿った複数の音響信号(被検体内の各位置における音響波の強度に対応する信号)を表す、位相整合した後のRAWデータ105が生成される。つまり、整相加算回路10は、RAWデータ105は、複数の電気信号(エコー検出データ)を用いて整相加算処理を行い複数の音響信号を出力する。
【0023】
図5は、画像記憶部7の内部構成の一例を示した図で、本実施例の画像メモリ15は、8スライス分のデータが保存できるように構成されている。まず初めにSL#1に1スライス分のRAWデータが書き込まれたタイミングで、SL#1のスライスデータはSL#2に移動し、SL#2のスライスデータはSL#3に移動し、というように、順次データのシフト操作がスライス単位で行われる。最終的にはSL#1からSL#8までの8スライス分のデータを同時に保存しておくことができる。この中でSL#1については書き込み専用のメモリ領域として動作し、SL#2からSL#8までは読み出し専用のメモリ領域として動作している。一方、メモリ制御回路14は、ライトアドレス制御とリードアドレス制御を、各々非同期でコントロールする制御回路である。ここで、ライトアドレス制御は、画像メモリ15のSL#1へ対応したメモリアドレスにRAWデータ105を書き込む。また、リードアドレス制御は、SL#2からSL#8までに保存された7スライス分のデータから、MPU1で指示されたエレベーション遅延量データに対応したメモリアドレスの複数RAWデータ107を画像メモリ15から同時に読み出す。
【0024】
図6は、加算演算回路13の内部構成を示した図で、MPU1で指定したエレベーション遅延量データに応じて出力された複数RAWデータ107を加算処理することで、エレベーション方向に合成開口法を行った加算RAWデータ108を出力する回路である。エレベーション方向はラテラル方向と直交ないし交差する方向であり、本発明の第2の方向に相当する。ラテラル方向の位相整合処理を行う整相加算回路10と異なる点は、エレベーション方向の位相制御をメモリ制御回路14で行っているので、FIFOを持つことなくデータの加算処理だけを加算演算回路13で行っている点である。
【0025】
図7(a)は、1次元配列の超音波探触子4をエレベーション方向の移動経路21に沿って機械的に移動させ、広い検査領域20の3次元超音波画像を取得する動作を示した図である。超音波探触子1を等速で移動し、移動経路21上の各位置において前述の断層スライス像を繰り返し取得すれば、取得した断層スライス像を密に並べることにより検査領
域全体の3次元超音波画像とすることが出来る。
【0026】
図7(b)は、1次元配列探触子4がエレベーション方向の移動経路21に沿って連続移動しながら、断層スライス像を順に、SL#(n−1)、SL#(n)、SL#(n+1)と取得する時の走査手順を示したものである。各断層スライス像を構成する2次元画像データは、エレベーション方向に対して一定周期の間隔で出力される。この時、超音波探触子4は間欠的に移動するものであっても良いし、連続的に移動するものであっても良い。連続的に移動する場合、断層スライス像は厳密には移動方向と直交しないが、説明をわかりやすくするためにここでは直交しているものとする。
【0027】
図8は、本発明の背景となる画像再構成の手法である合成開口法の原理を説明した図である。配列された小さな楕円図形30は各スライス面を走査するときの各送受信素子の位置を示し、点Pは3次元空間内の任意の注目点を示す。図8(a)は四角図形31aで囲った送受信素子群が(n−1)番目のスライス面を走査する時点を示したもので、中心部Saから発信した超音波ビームの一部がP点の方向にも伝播し、その反射波が四角図形31aの位置にある送受信素子によって受信される。図8(b)は探触子がn番目のスライス位置に移動して四角図形31bで囲った送受信素子群が中心部Sbから再び超音波ビームを発信し、その一部がP点の方向へも伝播してその反射波を四角図形31bの位置にある送受信素子群が受信する様子を示している。図8(c)は探触子が(n+1)番目のスライス位置に移動して四角図形31cで囲った送受信素子群が中心部Scから再び超音波ビームを発信し、その一部がP点の方向へも伝播してその反射波を四角図形31cの位置にある送受信素子群が受信する様子を示す。
【0028】
各スライス面での送受信時点はそれぞれ異なっているが、ここで送信から受信までの時間を伝播距離と音速から計算し、受信素子ごとに加算すべき信号の受信時刻を調整して同一のP点からの反射信号を加算するようにする。そうすれば、図8(d)のように四角図形32の位置にある送受信素子群からなる仮想的2次元探触子で受信した信号を2次元整相加算で計算した場合と等価な結果を得ることが出来る。このようにすると、1次元配列の超音波探触子を用いているにもかかわらず、2次元配列の超音波探触子を用いた場合に近い解像度の超音波画像を取得することができ、特にエレベーション方向の解像度を向上させることが可能になる。このような超音波発信時刻の異なる受信信号を合成して受信開口を実質的に大きくした場合と同等な解像度を得る方法は合成開口法として知られている。合成開口により得られたデータは、本実施例においては、第2の画像データに相当する。
【0029】
図9は、第1の実施例における画像再構成として、スライス面の合成開口法を説明する図である。説明を簡単にするために、注目点Pはスライス面SL#(n)の面内にあるものとする。送受信素子群の中心S0から垂直に発した超音波ビームはP点において反射し、R0位置の送受信素子で受信される。次に探触子はスライス面SL#(n+1)の位置に移動し、S0に対応する位置S1から再び超音波ビームを発信する。超音波ビームは垂直方向に発信されるが、その一部が断層スライス面SL#(n)内のP点の方向にも伝播し、P点で反射された超音波がR0点に対応する点R1で受信される。前述の合成開口法の整相加算は、R0での受信信号とR1での受信信号とを、それぞれ発信からP点で反射して受信するまでの伝播時間に相当する受信時間のずれを調整して加算すれば実現できる。
【0030】
次に、点S1からスライス面SL#(n+1)内の垂直方向にPまでと同じ距離の点Qを考える。この場合、点S1,P,R1からなる三角形と点S1,Q,R1からなる三角形とは明らかに合同なので、S1からP点を経由してR1に到達する時間とS1からQ点を経由してR1に到達する時間は同じになる。この関係はR1位置の送受信素子だけでな
く同じ送受信素子群の他の受信素子に関しても全く同じになるから、スライス面SL#(n+1)の位置においてP点を焦点とした1次元整相加算結果とQ点を焦点とした整相加算結果とは全く同じ加算信号となる。したがって、P点に対する2次元整相加算は、一旦スライス面ごとに1次元整相加算を行って点Pと点Qの整相加算信号を求め、次にエレベーション方向に適切な1次元整相加算を行って点Pと点Qの整相加算信号を加算すれば良いことがわかる。
【0031】
すなわち、図3で示した第1の実施例における画像生成部6は、この原理をリアルタイム処理で実現するもので、整相加算回路10から出力されるRAWデータ105はメモリ制御回路14を介して画像メモリ15に一時保存する。加算演算回路13では、保存された複数RAWデータ107の中から対応する遅延量のRAWデータを、メモリ制御回路14を介して参照し、合成開口法に基づくエレベーション方向の整相加算を実行する。これにより、図8に示した2次元整相加算を実行した場合と比べて少ない回路規模で等価な効果を得ている。
【0032】
図9に示した合成開口法を用いた場合に、基本原理としては参照するスライス面数が多くなるほど、整相加算後のデータ精度を向上させることは明白である。すなわち、解像度を向上させるための必要条件としては、まず、整相加算回路10から出力されるRAWデータ105を保存する画像メモリ15の領域を画像記憶部7の中でなるべく多く確保する事がある。さらに、加算演算回路13が同時に多くの複数RAWデータ107を使って合成開口処理を行えるよう速度を向上させる事がある。そこで、双方の回路規模の兼ね合いが必要となってくる。
【0033】
図10は、画像生成部6で生成される2次元画像データ103が、超音波探触子4の走査位置に対して出力されるタイミングを示した図である。従来の画像生成部6では図10(a)に示した出力タイミングのように、エコー検出データ102を取得してから2次元画像データ103を生成するまでの画像生成に時間遅延が無かった。そのため、断層スライス像のSL#(n−1)からSL#(n+4)は、超音波探触子4の走査位置の#(n−1)から#(n+4)に対してリアルタイムに出力されている。
【0034】
一方、第1の実施例を示した図10(b)の出力タイミングでは、画像記憶部7に3枚の断層スライス像を一時保存し、3枚の断層スライス像を使った合成開口による加算演算を実施して2次元画像データ103を生成している。そのため、合成開口に必要となる複数の断層スライス像が集まるまでの待ち時間が生じてしまう。すなわち(b)の例では、4スライス目のSL#(n+2)が取り込まれる際に、保持されているSL#(n−1)、SL#n、SL#(n+1)の断層スライス像を使って合成開口を実施する。そのため、超音波探触子4の走査位置が#(n+2)になった段階でSL#1の2次元画像データ103が生成されるといった出力タイミングのずれが発生する。
【0035】
図11は、画像表示部9でリアルタイム表示される超音波画像の様子を示した図であるが、前記の出力タイミングずれがどのように影響するかを説明する。図11(a)の従来の出力タイミングでは超音波探触子4の走査位置に合わせて断層スライス像が生成され、スライス像を重ねて表示される3次元超音波画像1の領域も探触子の動きに同期して生成されている。
図11(b)の本実施例の出力タイミングでは、超音波探触子4の走査位置に対して合成開口を行うための時間遅延が発生するため、走査している位置から遅れて画像2が表示される。この時、従来の断層スライス像である画像1は走査位置に合わせてリアルタイムに表示しておき、合成開口の画像生成が終わった段階で画像2に切り替えていくことができる。これにより、走査の直後から待ち時間なく断層スライス像を提示できるとともに、合成開口の演算が終わってからより高精細な画像を提示できるので、リアルタイムな画像
表示と高精細な画像表示をともに達成することが可能になる。すなわち、画像表示速度と画像分解能を両立できる。
【0036】
<実施例2>
図12は、本発明の実施例2に係る画像生成部6と画像記憶部7の内部構成を示す図である。図3の第1の実施例の構成と比較すると、加算演算回路13と信号処理回路11の代わりに適応型演算回路16と参照信号合成ブロック17のブロックが新たに加わり、保存された複数RAWデータ107を参照して適応型信号処理を実行する構成となっている。ただし、第1の画像データとしての断層スライス像のデータは、図2と同様の処理、つまり、適応型演算回路16は介さずに(スルーして)、RAWデータ105を用いて生成される。
【0037】
ここで、適応型信号処理の概略動作について説明する。レーダーの分野においては、目標距離を高精度に推定する手法として、適応型信号処理が知られている。Proc.Acoustics,Speech Signal Process.,pp.489−492(Mar.2005)には、このような適応型信号処理を超音波エコー画像データを生成する際に用いて解像度を向上させた手法が記載されている。また、深さ方向の空間分解能を向上する技術として、周波数領域干渉計法(FDI法:Frequency Domain Interferometry)と適応型信号処理との両方を行う手法も知られている。Conf Proc IEEE Eng Med Biol Soc.2010;1:5298−5301.や特許文献2には、探触子から出力される電気信号を用いて、FDI法と、適応型信号処理であるCAPON法と、を行い、血管壁の層構造を画像化した結果が示されている。
【0038】
適応型信号処理は、受信信号に応じて、その処理パラメータを適応的に変化させる。適応型信号処理の一つであるCAPON法は、複数の入力信号に対して、注目位置に関する感度を固定した状態で電力を最小化するように処理する方法である。
FDI法は受信信号(探触子から出力される電気信号)を周波数ごとに分解し、複数の周波数成分の位相情報を使用して注目位置における受信電力を推定する方法である。ある基準位置で位相が揃っている複数の周波数を考えた場合、その基準位置からの距離と波数との積が位相の変化量と比例することが分かる。つまりある注目距離を設定した時に、基準位置から注目距離までの距離と、周波数つまり波数とが既知であれば、どれだけ位相が変化するかを算出できることになる。この変化する位相分をそれぞれの周波数の受信信号に与え、足し合わせることで注目距離における受信電力を推定できる。
FDI法と適応型信号処理とを組み合わせることは、各周波数成分に分解された受信信号に対して、あらかじめ決定された位相変化量・重みではなく、適応型信号処理によって信号に応じて算出された位相変化量・重みを用いて、注目位置における受信電力を推定することになる。
本発明においては、適応型信号処理としてCAPON法だけでなく、MUSIC法やESPRIT法などを用いても良い。
【0039】
一般的な超音波診断装置は先述したように、受信波形の包絡線を取得することで画像を形成する。ここにFDI法及びCAPON法を適用することでさらに解像度を上げる場合、FDIの処理レンジ内において複数の反射層が存在することが想定される。大気観測用レーダーでは観測時間を十分長くすることにより複数の反射層からの複数の反射波間の相関を抑圧可能であるが、医用超音波イメージングにおいては1処理レンジの観測時間が短く、複数の反射波間の相関を抑圧することができない。そのため、近接した反射層からの複数の反射波は高い相関性を有していることが考えられる。
【0040】
このような高い相関性を有する複数の反射波形に対してCAPON法やMUSIC法な
どの適応型信号処理をそのまま適用すると、所望の信号を打ち消すなどの予期しない動作を行うことが知られている。このような状況に対して、周波数平均法を適用することで、FDI法及びCAPON法が動作することが確認されているので、医用超音波イメージングにFDI及びCAPON法を適用する場合には、周波数平均法を使用するのが望ましい。
【0041】
このように特許文献2によれば、周波数特性の違う観察対象物が存在する場合であっても、基準信号を合成することによって対象物の周波数特性を考慮した演算用参照信号を生成することができる。その結果、適応型信号処理による深さ方向の空間分解能の向上が可能となる。
【0042】
図13は、適応型演算回路16の処理について説明するフローチャートである。適応型演算回路16は、画像記憶部7から入力された画像信号から1回で処理する時間分、つまり処理レンジ分の信号を抽出する(S01)。その後、参照信号合成ブロック17から入力された複数の演算用参照信号との相互相関を算出する(S02)。ここでは複数の演算用参照信号のうち1種類に対する処理を例示的に示すが、実際には入力された複数の演算用参照信号に関して同様の処理を行う。相互相関をフーリエ変換することで周波数ごとの相関H(ω)が求まる(S03、S04)。
【0043】
次に、数式1によって演算用参照信号を用いてホワイトニング処理を行う(S05)。参照信号をg(t)、そのフーリエ変換をG(ω)とすると、数式(1)により、ホワイトニングされ、周波数スペクトルが平坦化された信号である修正相関Hwhi(ω)が算出できる(S06)。ただし、ηは雑音電力である。
【数1】
【0044】
次に、平坦化された信号に対して周波数領域干渉計法および周波数平均法を適用する。すなわち、数式(2)で表せるi、j成分を有する相関マトリクスRを形成する(S07)。
【数2】
【0045】
次に、数式(3)で周波数平均法を用いて部分相関マトリクスR’を算出する(S08、S09)。そして、このようにして求めた部分相関マトリクスR’を用いて深さ方向の電力分布P(r)を推定する(S10)。ここでCは注目深さrに対する拘束ベクトルであり、knはn番目の周波数に対応する波数である。以上の処理によって、複数の演算用参照信号に対応した深さ方向に関する複数の電力分布が算出される。
【数3】
【0046】
図14は、参照信号合成ブロック17における処理を説明するフローチャートである。ここでは2種類の基準信号f1(t)、f2(t)を内挿(合成)することで演算用参照
信号を作成する例を説明する。なお演算用参照信号の作成に用いられる基準信号は、予め装置内のメモリに格納されている。まず参照信号合成ブロック17は、基準信号f1(t)、f2(t)の電力を揃える(S20)。
【0047】
次に2種類の基準信号をフーリエ変換し位相φ1(f)、φ2(f)を求める(S21)。φ’(f)=φ(f)−afとした時のΣ(φ’(f))2を最小にするaoptをそれぞれの基準信号に対して探索する。それぞれのaoptの場合の基準信号のφ’(f)を求めることで、位相を平坦化する(S22)。
【0048】
次に、数式(4)で所定の内挿率(内挿係数ともいう。)αを用いて振幅と位相とを内挿し、合成したREF3(f)を算出する(S23)。なお内挿率αは、0≦α≦1を満たす任意の値である。ここでREF1(f)、REF2(f)はそれぞれ電力補正、位相補正後のf1(t)、f2(t)の周波数成分である。
【数4】
【0049】
最後に、REF3(f)を逆フーリエ変換して演算用参照信号の波形を求める(S24)。なお、この際に信号電力が一定になるよう振幅補正を行うことが望ましい。参照信号合成ブロック17は、内挿率αを変化させることで、複数の内挿率αに対応する複数の演算用参照信号を求め、適応型演算回路16へ出力する。内挿率αの値やその変化のステップについては適宜設定することができる。
【0050】
以上のような適応型信号処理を行う場合は画像生成までのプロセスが複雑になる。その結果、第1の実施例で用いた合成開口処理の整相加算に比べると画像が生成されるまでの処理時間が更に長くなるため、出力タイミングのずれが更に増加する。適応型信号処理により得られたデータは、本実施例においては、第2の画像データに相当する。
【0051】
図15は、第2の実施例において画像表示部9でリアルタイム表示される超音波画像の様子を示した図であり、前記の出力タイミングずれがどのように影響するかを説明する。図15(a)の出力タイミングでは超音波探触子4の走査位置に合わせて断層スライス像が生成され、スライス像を重ねて表示される画像1の領域も探触子の動きに同期して生成されている。
図15(b)の出力タイミングでは、超音波探触子4の走査位置に対して適応型信号処理を行うための時間遅延が発生するため、走査が完了した後に遅れて適応型信号処理の画像3が表示される状況もある。この時、従来の断層スライス像の画像1は走査位置に合わせてリアルタイムに表示し、適応型信号処理の画像3が生成された段階で画像を切り替えていくことも可能である。これにより、走査の直後から待ち時間なく断層スライス像を提示できるとともに、適応型信号処理の演算が終わってからより高精細な画像を提示できるので、リアルタイムな画像表示と高精細な画像表示をともに達成することが可能になる。すなわち、画像表示速度と画像分解能を両立できる。
【0052】
<実施例3>
第3の実施例では、第1と第2の実施例で説明した合成開口処理と適応型信号処理の2系統の演算回路を同時に実装した場合について説明する。上記2系統の演算回路における出力タイミングについては、予め取り込む断層スライス像のデータ量で決まる合成開口処理の演算回路に比べて、適応型信号処理を使った演算回路の方が処理に時間がかかるので
、画像生成に対する時間ずれが発生する。
【0053】
図16は、第3の実施例において画像表示部9でリアルタイム表示される超音波画像の様子を示した図である。前記2系統の出力タイミングずれがどのように影響するかを説明すると、図16(a)の出力タイミングでは、超音波探触子4の走査位置に合わせて断層スライス像が生成され、画像1の領域も探触子の動きに同期して表示される。その後、合成開口処理によって生成された画像2に置き換えられて表示され、更に遅れて適応型信号処理で生成された画像3に置き換えられて表示される。
【0054】
また図16(b)の出力タイミングでは、画像1と画像2の出力タイミングは図16(a)と同じだが、画像3を表示する場合に3次元データの位置を領域限定した場合を示している。例えば、適応型信号処理を用いた方法は距離方向の解像度を向上させることはできるが、探触子からの距離が近い部分などでは単純な開口制御による画像2の方が高解像の場合もある。そのような場合は浅い部分(所定の深度以浅の部分)は画像2のまま続行し、深い部分だけを画像3に切り替えて表示する方が、3次元の超音波画像として優れたものとなる。このとき、画像2と画像3を切り替える所定の深度は、実験により得られた所定の値を用いることができる。すなわち、表示する画像の切換え方法は、時系列に切り替えるだけでなく領域別に切り替えていくことも可能であり、表示の組み合わせ方法については本実施例での制限はない。本実施例においては、合成開口により得られたデータが第2の画像データに、適応型信号処理により得られたデータが第3の画像データに相当する。
【0055】
以上のように本実施例に従えば、1次元配列探触子をエレベーション方向に連続移動させながら取得した断層スライス像を使って3次元超音波画像を生成する超音波診断装置において、画像表示速度を損なわずに段階的な画像生成を行える。同時に、エレベーション方向の画像分解能を向上させることができる。
【符号の説明】
【0056】
1:MPU(マイクロプロセッサユニット)、4:超音波探触子、6:画像生成部、9:表示部
【特許請求の範囲】
【請求項1】
被検体から伝播した音響波を受信して電気信号に変換する複数の素子が少なくとも第1の方向に配列された探触子と、
前記探触子を、前記第1の方向と交差する第2の方向に移動させる走査手段と、
複数の前記電気信号を用いて求めた被検体内の各位置における音響波の強度に基づく音響信号を複数用いて、被検体の断層に対応する第1の画像データを前記第2の方向に沿って複数生成するとともに、複数の前記音響信号を用いて第2の画像データを生成する、生成手段と、
前記第1の画像データと前記第2の画像データとが入力され、被検体内の情報を示す画像を表示部に表示させる表示制御手段と
を有し、
前記表示制御手段は、
前記表示部に前記第1の画像データに基づく表示をさせ、
被検体の同じ位置における前記第2の画像データが入力されると、前記第1の画像データに基づく表示から前記第2の画像データに基づく表示に切り替える
ことを特徴とする被検体情報取得装置。
【請求項2】
前記生成手段は、
前記複数の電気信号を用いた整相加算処理により前記複数の音響信号を取得し、
前記複数の音響信号を用いた合成開口処理により前記第2の画像データを生成する
ことを特徴とする請求項1に記載の被検体情報取得装置。
【請求項3】
前記生成手段は、
前記複数の電気信号を用いた整相加算処理により前記複数の音響信号を取得し、
前記複数の音響信号を用いた適応型信号処理により前記第2の画像データを生成することを特徴とする請求項1に記載の被検体情報取得装置。
【請求項4】
被検体から伝播した音響波を受信して電気信号に変換する複数の素子が少なくとも第1の方向に配列された探触子と、
前記探触子を、前記第1の方向と交差する第2の方向に移動させる走査手段と、
複数の前記電気信号を用いて求めた被検体内の各位置における音響波の強度に基づく音響信号を複数用いて、被検体の断層に対応する第1の画像データを前記第2の方向に沿って複数生成するとともに、複数の前記音響信号を用いて第2の画像データ及び第3の画像データを生成する生成手段と、
前記第1、第2、及び第3の画像データが入力され、被検体内の情報を示す画像を表示部に表示させる表示制御手段と、
を有し、
前記表示制御手段は、
前記表示部に前記第2の画像データに基づく表示をさせ、
被検体の同じ位置における前記第3の画像データが入力されると、前記第2の画像データに基づく表示から前記第3の画像データに基づく表示に切り替える
ことを特徴とする被検体情報取得装置。
【請求項5】
前記生成手段は、
前記複数の電気信号を用いた整相加算処理により前記複数の音響信号を取得し、
前記複数の音響信号を用いた合成開口処理により前記第2の画像データを生成し、
前記複数の音響信号を用いた適応型信号処理により前記第3の画像データを生成することを特徴とする請求項4に記載の被検体情報取得装置。
【請求項6】
前記表示部に前記第2の画像データに基づく表示を行い、被検体の同じ位置における前記第3の画像データを生成して、被検体の所定の深度以浅の部分では前記第2の画像データに基づく表示を行い、所定の深度より深い部分では前記第2の画像データに基づく表示から前記第3の画像データに基づく表示に切り替える
ことを特徴とする請求項4に記載の被検体情報取得装置。
【請求項7】
被検体から伝播した音響波を受信して電気信号に変換する複数の素子が少なくとも第1の方向に配列された探触子と、前記探触子を前記第1の方向と交差する第2の方向に移動させる走査手段と、複数の前記電気信号から求めた被検体内の各位置における音響波の強度に基づく音響信号を複数用いて画像データを生成する生成手段と、画像データに基づき被検体の画像を表示する表示部を有する被検体情報取得装置の制御方法であって、
前記生成手段が、被検体の断層に対応する第1の画像データを前記第2の方向に沿って複数生成するステップと、
前記表示部が、前記第1の画像データに基づく表示を行うステップと、
前記生成手段が、複数の前記音響信号を用いて第2の画像データを生成するステップと、
前記表示部が、前記第1の画像データに基づく表示から被検体の同じ位置における前記第2の画像データに基づく表示に切り替えるステップと、
を有することを特徴とする被検体情報取得装置の制御方法。
【請求項1】
被検体から伝播した音響波を受信して電気信号に変換する複数の素子が少なくとも第1の方向に配列された探触子と、
前記探触子を、前記第1の方向と交差する第2の方向に移動させる走査手段と、
複数の前記電気信号を用いて求めた被検体内の各位置における音響波の強度に基づく音響信号を複数用いて、被検体の断層に対応する第1の画像データを前記第2の方向に沿って複数生成するとともに、複数の前記音響信号を用いて第2の画像データを生成する、生成手段と、
前記第1の画像データと前記第2の画像データとが入力され、被検体内の情報を示す画像を表示部に表示させる表示制御手段と
を有し、
前記表示制御手段は、
前記表示部に前記第1の画像データに基づく表示をさせ、
被検体の同じ位置における前記第2の画像データが入力されると、前記第1の画像データに基づく表示から前記第2の画像データに基づく表示に切り替える
ことを特徴とする被検体情報取得装置。
【請求項2】
前記生成手段は、
前記複数の電気信号を用いた整相加算処理により前記複数の音響信号を取得し、
前記複数の音響信号を用いた合成開口処理により前記第2の画像データを生成する
ことを特徴とする請求項1に記載の被検体情報取得装置。
【請求項3】
前記生成手段は、
前記複数の電気信号を用いた整相加算処理により前記複数の音響信号を取得し、
前記複数の音響信号を用いた適応型信号処理により前記第2の画像データを生成することを特徴とする請求項1に記載の被検体情報取得装置。
【請求項4】
被検体から伝播した音響波を受信して電気信号に変換する複数の素子が少なくとも第1の方向に配列された探触子と、
前記探触子を、前記第1の方向と交差する第2の方向に移動させる走査手段と、
複数の前記電気信号を用いて求めた被検体内の各位置における音響波の強度に基づく音響信号を複数用いて、被検体の断層に対応する第1の画像データを前記第2の方向に沿って複数生成するとともに、複数の前記音響信号を用いて第2の画像データ及び第3の画像データを生成する生成手段と、
前記第1、第2、及び第3の画像データが入力され、被検体内の情報を示す画像を表示部に表示させる表示制御手段と、
を有し、
前記表示制御手段は、
前記表示部に前記第2の画像データに基づく表示をさせ、
被検体の同じ位置における前記第3の画像データが入力されると、前記第2の画像データに基づく表示から前記第3の画像データに基づく表示に切り替える
ことを特徴とする被検体情報取得装置。
【請求項5】
前記生成手段は、
前記複数の電気信号を用いた整相加算処理により前記複数の音響信号を取得し、
前記複数の音響信号を用いた合成開口処理により前記第2の画像データを生成し、
前記複数の音響信号を用いた適応型信号処理により前記第3の画像データを生成することを特徴とする請求項4に記載の被検体情報取得装置。
【請求項6】
前記表示部に前記第2の画像データに基づく表示を行い、被検体の同じ位置における前記第3の画像データを生成して、被検体の所定の深度以浅の部分では前記第2の画像データに基づく表示を行い、所定の深度より深い部分では前記第2の画像データに基づく表示から前記第3の画像データに基づく表示に切り替える
ことを特徴とする請求項4に記載の被検体情報取得装置。
【請求項7】
被検体から伝播した音響波を受信して電気信号に変換する複数の素子が少なくとも第1の方向に配列された探触子と、前記探触子を前記第1の方向と交差する第2の方向に移動させる走査手段と、複数の前記電気信号から求めた被検体内の各位置における音響波の強度に基づく音響信号を複数用いて画像データを生成する生成手段と、画像データに基づき被検体の画像を表示する表示部を有する被検体情報取得装置の制御方法であって、
前記生成手段が、被検体の断層に対応する第1の画像データを前記第2の方向に沿って複数生成するステップと、
前記表示部が、前記第1の画像データに基づく表示を行うステップと、
前記生成手段が、複数の前記音響信号を用いて第2の画像データを生成するステップと、
前記表示部が、前記第1の画像データに基づく表示から被検体の同じ位置における前記第2の画像データに基づく表示に切り替えるステップと、
を有することを特徴とする被検体情報取得装置の制御方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2013−75150(P2013−75150A)
【公開日】平成25年4月25日(2013.4.25)
【国際特許分類】
【出願番号】特願2012−175738(P2012−175738)
【出願日】平成24年8月8日(2012.8.8)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
【公開日】平成25年4月25日(2013.4.25)
【国際特許分類】
【出願日】平成24年8月8日(2012.8.8)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
[ Back to top ]