
被検体情報取得装置および被検体情報取得装置の制御方法
【課題】測定深度に適した音響波データの取得方法を提供できる被検体情報取得装置を提供する。
【解決手段】被検体情報を取得する被検体情報取得装置であって、複数の音響素子が、少なくとも第一の方向に沿って配列され、前記複数の音響素子により、音響波ビームの送信および被検体内部で反射した音響波の受信を、前記第一の方向に沿って順次行う音響波探触子と、前記第一の方向に交差する第二の方向を主走査方向とし、前記主走査方向に前記音響波探触子を所定の速度で移動させる走査手段と、前記音響波ビームの送信方向における被検体情報を取得するための測定深度の情報を取得し、前記測定深度と前記被検体情報の主走査方向の分解能と前記音響波探触子の移動速度に応じて、前記音響波ビームの前記第一の方向に沿った本数を決定する送信音響波調整手段と、を有することを特徴とする。
【解決手段】被検体情報を取得する被検体情報取得装置であって、複数の音響素子が、少なくとも第一の方向に沿って配列され、前記複数の音響素子により、音響波ビームの送信および被検体内部で反射した音響波の受信を、前記第一の方向に沿って順次行う音響波探触子と、前記第一の方向に交差する第二の方向を主走査方向とし、前記主走査方向に前記音響波探触子を所定の速度で移動させる走査手段と、前記音響波ビームの送信方向における被検体情報を取得するための測定深度の情報を取得し、前記測定深度と前記被検体情報の主走査方向の分解能と前記音響波探触子の移動速度に応じて、前記音響波ビームの前記第一の方向に沿った本数を決定する送信音響波調整手段と、を有することを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、被検体情報取得装置および被検体情報取得装置の制御方法に関する。
【背景技術】
【0002】
超音波を生体に対して送波し、反射してきた超音波を解析することで生体内の構造を画像化する超音波測定装置が医療現場で運用されている。超音波を生体に送波すると、生体内の音響インピーダンスの異なる境界面で超音波の反射が起こる。超音波測定装置は、この反射波を受信、解析することで被検体内の組織情報を得ることができる。
【0003】
超音波測定装置は、腫瘤の深さ方向(超音波ビームの送信方向)の位置や大きさを画像で認識できるという利点がある。また、超音波による音響的な測定を行うため、生体内の組織を非侵襲で測定することができ、患者への身体的負担の面でも大きな優位性を有している。
【0004】
希望する測定深度を設定し、フォーカシングを行う機能を有する超音波診断装置において、フレームレートを可及的に高くする技術が特許文献1に開示されている。特許文献1に開示されている超音波診断装置は、異なるフォーカス間での信号合成時の境界位置の深さに応じて、超音波送受信間隔を決定したうえで超音波の送受信を制御する。これにより、最適な超音波送受信間隔を設定することが可能となり、測定深度を一律とした場合と比べてフレームレートを向上させることができる。
【0005】
また、決まった一定の超音波送信周期で超音波の送受信を行う装置において、その送信周期の時間を有効に活用する技術が特許文献2に開示されている。特許文献2に開示されている技術によれば、超音波の送信周期が、測定に必要な超音波送受信時間の2倍以上ある場合に、送信周期の中で空いている時間を用いてインタリーブ走査を行う。これにより、測定時間を有効に使い、フレームレートを向上させることができる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2010−94171号公報
【特許文献2】特開平3−126442号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
従来の超音波測定装置には、被検体の測定に時間を要するという問題がある。例えば、乳がんの検診を行うマンモグラフィでは、測定のために被検部位である乳房を圧迫固定するが、被検者に圧迫による負担をかける時間は短い方が好ましい。
【0008】
一定間隔で整列した複数の断層画像により構成される3次元超音波画像の生成を行う超音波測定装置は、目的とする超音波画像のボクセルピッチに従って断層画像を一枚ずつ生成する必要がある。つまり、探触子を連続的に移動させながら、断層画像の生成に必要な超音波信号を順次取得しなければならないため、探触子が次の断層画像を取得する位置に達するまでに、断層画像一枚分の超音波信号を取得しなければならない。従って、測定時の探触子の移動速度は、上記の条件を満たす最高速度より速くすることができない。
【0009】
また、超音波信号の取得時間は、目的とする測定深度が深いほど、超音波の伝播に時間を要するため長くなる。つまり、測定深度が深くなるほど探触子の移動速度は遅くなる。
逆に、一定の移動速度を確保しようとした場合は、測定深度は制限されることになる。近年、超音波画像の高解像度化の要求が増しているが、これに対応して超音波信号をより細かいピッチで取得しようとした場合、断層画像一枚の処理に割り当てられる時間は短くなるため、測定ができる最大深度はより制限される。
【0010】
ここで探触子の移動速度について考える。画像の解像度から計算できる超音波信号の取得ピッチを、測定深度から計算できる超音波信号の取得に必要な時間で除したものが、探触子の移動速度となる。つまり、従来の被検体情報取得装置では、画像解像度が一定である場合、測定可能な深度を深く設定すれば探触子の移動が遅くなり、浅く設定すれば探触子の移動が速くなる。
【0011】
ここから、次のような問題点を導くことができる。
第一の問題は、測定可能な深度を深くすることで探触子の移動速度を遅く設定すると、超音波信号の取得時間が短い場合に無駄な時間が生じてしまうという点である。すなわち、3次元超音波画像の測定深さが浅い場合、処理を行わない冗長な時間が発生してしまう。
【0012】
第二の問題は、測定可能な深度を浅くすることで探触子の移動速度を速く設定すると、冗長な時間は無くなるが、超音波信号の取得に時間のかかる箇所の測定ができなくなるという点である。すなわち、3次元超音波画像の測定深さが深い場合、処理を行う時間が足りなくなる。
【0013】
この問題は、超音波信号の取得時間に応じて探触子の移動速度を可変とする、つまり、信号の取得に時間がかかる箇所は移動速度を遅く、時間がかからない箇所は移動速度を速くすることで解決するようにも思える。しかし、被検体情報取得装置は、超音波信号の取得ピッチが細かいため、探触子を加減速するための距離と時間を得ることが難しく、速度制御を容易に行うことができない。
また、探触子を連続的に移動させながら超音波ビームを送受信する場合、探触子の移動
速度を測定中に変更すると、断面方向の傾きが変化し、画像が歪んでしまうため、超音波画像ごとの比較が困難になる。このため、探触子の移動速度は、測定中は常に一定であることが好ましい。
【0014】
特許文献1および2に記載の発明は、ともにリアルタイム性を向上させ、画像取得時のフレームレートを改善することができるが、全体の走査時間について考慮されたものではないため、上記課題を解決することはできない。
【0015】
本発明は、上記課題を鑑み、測定深度に適した音響波データの取得方法を提供できる被検体情報取得装置を提供することを目的とする。
【課題を解決するための手段】
【0016】
上記課題を解決するために、本発明に係る被検体情報取得装置は、被検体情報を取得する被検体情報取得装置であって、複数の音響素子が、少なくとも第一の方向に沿って配列され、前記複数の音響素子により、音響波ビームの送信および被検体内部で反射した音響波の受信を、前記第一の方向に沿って順次行う音響波探触子と、前記第一の方向に交差する第二の方向を主走査方向とし、前記主走査方向に前記音響波探触子を所定の速度で移動させる走査手段と、前記音響波ビームの送信方向における被検体情報を取得するための測定深度の情報を取得し、前記測定深度と前記被検体情報の主走査方向の分解能と前記音響波探触子の移動速度に応じて、前記音響波ビームの前記第一の方向に沿った本数を決定する送信音響波調整手段と、を有することを特徴とする。
【0017】
また、本発明に係る被検体情報取得装置の制御方法は、複数の音響素子が、少なくとも第一の方向に沿って配列され、前記複数の音響素子により、音響波ビームの送信および被検体内部で反射した音響波の受信を、前記第一の方向に沿って順次行う音響波探触子を有し、前記第一の方向に交差する第二の方向を主走査方向とし、前記主走査方向に前記音響波探触子を所定の速度で移動させて被検体情報を取得する被検体情報取得装置の制御方法であって、前記音響波ビームの送信方向における被検体情報を取得するための測定深度の情報を取得するステップと、前記測定深度と前記被検体情報の主走査方向の分解能と前記音響波探触子の移動速度に応じて、前記音響波ビームの前記第一の方向に沿った本数を決定するステップと、を含むことを特徴とする。
【発明の効果】
【0018】
本発明によれば、測定深度に適した音響波データの取得方法を提供できる被検体情報取得装置を提供することができる。
【図面の簡単な説明】
【0019】
【図1】第一の実施形態における超音波測定装置のシステム構成図。
【図2】第一の実施形態における超音波測定の方法を説明する概念図。
【図3】第一の実施形態における最大深度での電子走査と信号取得時間の関係図。
【図4】第一の実施形態における電子走査の方法を詳細に説明する概念図。
【図5】第一の実施形態における最大深度での超音波データの取得方法説明図。
【図6】第一の実施形態における深度が深い場合の電子走査と信号取得時間の関係図。
【図7】第一の実施形態における深度が深い場合の超音波データ取得方法説明図。
【図8】第一の実施形態における超音波データの取得の流れを示すフローチャート。
【図9】第二の実施形態における深度が浅い場合の電子走査と信号取得時間の関係図。
【図10】第二の実施形態における深度が浅い場合の超音波データ取得方法説明図。
【発明を実施するための形態】
【0020】
(第一の実施形態)
以下に、本発明の第一の実施形態について図面を参照しながら説明する。
第一の実施形態に係る被検体情報取得装置は、被検体に音響波ビーム、すなわち超音波ビームを送信し、被検体内部で反射した反射波を受信して、被検体情報を画像データとして取得する超音波エコー技術を利用した超音波測定装置である。取得される被検体情報とは、被検体内部の組織の音響インピーダンスの違いを反映した情報である。
【0021】
なお、実施形態の説明において、主走査方向とは、探触子が移動しながら超音波信号を取得する方向を示す言葉とし、副走査方向とは、主走査方向に交差する方向を示す言葉とする。また、超音波データとは、測定対象の領域から取得される、3次元超音波画像を生成するために必要な全てのデータを示す言葉とする。また、超音波信号とは、一つまたは複数の音響素子が反射波を受信することで生成する信号を示す言葉とする。また、超音波ビームとは、複数の音響素子が、特定の一点に収束するように位相をずらして送信した超音波の集合を示す言葉とする。また、電子走査幅とは、測定のための超音波ビームが送信される、副走査方向に沿った幅を示す言葉とする。
【0022】
また、被検体情報取得装置が行う走査には、探触子を二次元平面上で機械的に移動させる機械走査と、複数の音響素子によって生成した超音波ビームを副走査方向にずらしながら送受信する電子走査の二種類がある。実施形態の説明においては、前者を探触子走査、後者を超音波走査と称する。
【0023】
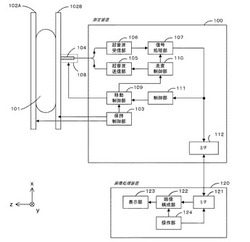
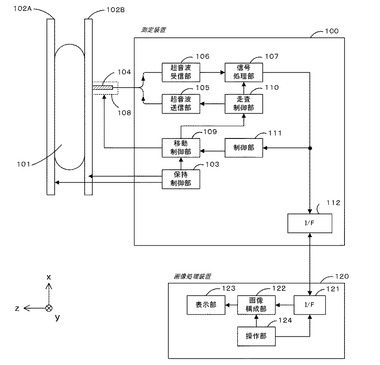
図1は、第一の実施形態における超音波測定装置のシステム構成を表す図である。
第一の実施形態における超音波測定装置は、大きく分類して、測定装置100および画像処理装置120で構成される。測定装置100は、超音波によって被検体の測定を行う装置であり、画像処理装置120は測定装置100を操作し、測定されたデータを可視化するための装置である。測定装置100は、保持板102、保持制御部103、探触子104、超音波送信部105、超音波受信部106、信号処理部107、移動機構108、移動制御部109、走査制御部110、インタフェース112から構成される。
【0024】
画像処理装置120は、インタフェース121、画像構成部222、表示部223、操作部124から構成される。一般にパソコンやワークステーション等の高性能な演算処理機能やグラフィック表示機能を備える装置を用いる。以下、それぞれの構成を説明しながら、被検体の計測方法について説明する。
【0025】
まず、測定装置100の構成を説明する。
被検体101は、人体、具体的には人体や動物の乳房や指、手足などの診断の対象部位が想定される。検査部を両側から挟む形で装置に固定する保持板102A、102Bに固定される。
【0026】
保持板102は、被検体の少なくとも一部の形状を一定に保ち、被検体と探触子との間に設けられる保持部材であり、102Aと102Bの2枚1対で構成される。保持部材で両側から被検体を挟持すると、測定中での位置が固定され、体動などによる位置誤差を低減することができる。また、保持により被検体の深部まで超音波を効率よく到達させることができる。
【0027】
保持部材としては、超音波の伝播効率が高く、かつ、被検体や探触子との音響整合性が高い部材を用いることが好ましい。特に保持板102Bは、超音波の伝播経路に位置するため、超音波探触子との音響整合性が高い部材であることが好ましい。音響整合性を高めることを目的に、保持板と被検体、保持板と探触子との間にジェルなどの音響整合材を介在させてもよい。保持板は、保持制御部103により、測定に好適な保持間隔に制御される。保持板102Aと102Bを区別する必要がない場合はまとめて保持板102と表記する。
【0028】
保持制御部103は、被検者への負担や測定深度に合わせて、被検体101の保持状態を超音波測定に好適な保持間隔と保持圧力に調整する。また、超音波測定中は、被検体の保持状態を一定に保つように制御する。また、超音波測定時に被検体の保持情報(保持距離と保持圧力)を移動制御部109に出力する。本発明において測定深度とは、被検体情報を取得するための深さ方向(超音波ビームの送信方向)の距離である。第一の実施形態では、この保持距離と保持板102Bの厚さを加えたものを超音波測定の測定深度と定義する。
【0029】
探触子104は、超音波源および複数の音響素子が配列して構成され、被検体に対して超音波ビームの送信を行い、被検体内部において反射された超音波エコーを受信して電気信号に変換する手段である。一般的な超音波探触子は、圧電セラミックス(PZT)を利用した変換素子や、マイクロフォン静電容量型の変換素子などが使用される。
また、静電容量型のCMUT(Capacitive Micromachined Ultrasonic Transducer)、磁性膜を用いるMMUT(Magnetic MUT)なども用いることができる。また、圧電薄膜を用いるPMUT(Piezoelectric MUT)など、超音波探触子にはどのような方式のものを
用いてもよい。
【0030】
また、2次元平面状の保持板102Bに探触子を接触させ、移動しながら測定を行う超
音波測定装置では、平行な超音波ビームで均一な画質の断層画像を生成できるリニア走査型の探触子が一般的に使用される。第一の実施形態では、説明のため音響素子を直線状に一列に配列した一次元探触子を使用する例について説明する。ただし、本発明を適用することができる被検体情報取得装置では、2次元上に配列されたアレイ型探触子(1.5D探触子も含む)を使用して測定を行う構成でもよい。なお、実施形態の説明では、超音波ビームの移動を電子スイッチ等を切り替えることによって実現するため、超音波走査のことを電子走査という言葉を用いて説明する。
【0031】
走査制御部110は、探触子104を構成する各々の音響素子に印加する駆動信号を生成して、送信される超音波の周波数及び音圧を制御する。また、超音波ビームの送信方向を設定して、送信方向に対応して送信遅延パターンを選択する送信制御機能と、超音波信号の受信方向を設定して、受信方向に対応して受信遅延パターンを選択する受信制御機能とを備えている。送信遅延パターンとは、複数の音響素子から送信される超音波によって所定の方向に超音波ビームを形成するために、複数の駆動信号に与えられる遅延時間のパターンである。また、受信遅延パターンとは、複数の音響素子によって検出される超音波信号に対して任意の方向からの超音波信号を抽出するために、複数の受信信号に与えられる遅延時間のパターンである。これらの送信遅延パターンと受信遅延パターンは別途記憶手段(不図示)に記憶されている。
【0032】
超音波送信部105は、走査制御部110によって生成された駆動信号を、探触子104を構成する個々の音響素子に対して印加する。
【0033】
超音波受信部106は、探触子104を構成する複数の音響素子が検出したアナログ信号を増幅する信号増幅部と、アナログ信号をデジタル信号に変換するA/D変換部から構成され、受信した信号をデジタル信号に変換する。
【0034】
信号処理部107は、走査制御部110により選択された受信遅延パターンに基づいて、超音波受信部106により生成された信号に対してそれぞれの遅延時間に対応させて、各々の信号を加算することにより受信フォーカス処理を行う。この処理により、焦点が絞り込まれた超音波信号が生成される。また、信号処理部107は、測定深度によらずに均一なコントラストをもつ断層画像を生成するために、超音波の反射位置の深度に応じて増幅利得を増減するTGC(Time Gain Control)制御などを行う。
なお、第一の実施形態における超音波信号は、最終的にBモードの断層画像を生成できるような信号であれば、どのような形態であってもよい。例えば、ローパスフィルタなどで包絡線検波処理を施した包絡線データや、その包絡線データに対して、対数圧縮やゲイン調整などの処理を行ったデータなどであってもよい。
【0035】
移動機構108は、モータなどの駆動部とその駆動力を伝達する機械部品から構成されており、移動制御部109の指示を受け、保持板102B上で探触子104を移動させるための駆動機構である。また、探触子104の位置情報を検出して移動制御部109へ出力する。
【0036】
移動制御部109は、探触子104を保持板上で2次元的に移動させるように移動機構108を制御する。また、探触子104が超音波信号の取得開始位置に達すると、走査制御部110に対して超音波信号の取得指示命令を発行する。探触子104を2次元的に移動させることで、広い測定領域を得ることができ、例えば乳がん診断ではフルブレストでの超音波データの取得が可能となる。また、移動制御部109は、保持制御部103から受けた保持情報に基づいて、測定深度および超音波送受信時間を算出し、超音波ビームの電子走査幅および探触子走査の移動量調整を行う。詳細な動作については後述する。
【0037】
制御部111は、画像処理装置120からの測定開始指示や各種要求を受け付け、超音波測定装置全体を管理、制御する。走査制御部110への測定開始の伝達の他にも、装置個体を識別する識別情報や個体固有に設定される情報の管理、装置の状態の監視、それらの情報を画像処理装置120へ伝送する役割などを持っている。
【0038】
インタフェース112は、超音波データと装置情報を画像処理装置120に送信し、画像処理装置120から各種指示を受信するための入出力手段である。インタフェース112は、画像処理装置120のインタフェース121と共に、測定装置100と画像処理装置120との間のデータ通信を行う役割を有する。リアルタイム性を確保でき、かつ大容量の伝送が可能な通信規格を採用することが好ましい。
【0039】
次に、画像処理装置120の構成を説明する。
インタフェース121は、超音波測定装置のインタフェース112と同等の機能を有し、インタフェース112と連携して超音波データや装置への各種指示などを双方向に伝送する。
【0040】
画像構成部222は、伝送された超音波データに基づいて、被検体内の組織情報を画像化し、3次元超音波画像を構成する。また、構成した超音波画像に対して、輝度の調整や歪補正、注目領域の切り出しなどの各種補正処理を適用して、より診断に好ましい形態にする機能を有していてもよい。
また、ユーザによる操作部224の操作に従って、超音波画像の構成に関するパラメータや表示画像の調整などを行う役割も持つ。なお、表示すべき超音波画像のボクセルピッチ(解像度)は、超音波信号の取得ピッチと一致させることが好ましい。余分な補間処理などを省くことができ、取得した超音波信号を最も有効に利用できるためである。
【0041】
表示部223は、画像構成部222により構成された3次元超音波画像を表示する表示装置である。また、操作部224は、超音波測定装置の操作ソフトウェア(不図示)上で、ユーザが測定位置の指定、測定の調整など装置の操作や超音波画像に対する画像処理操作を行うための入力装置である。
【0042】
本実施形態に係る超音波装置は、以上の構成を有することで、測定深度に適した超音波データを取得し、3次元超音波画像を利用者に提示することができる。なお、図1では画像処理装置120を外部装置として、超音波測定装置と画像処理装置を別々のハードウェア構成としているが、それぞれが有する機能を集約して一体化した構成であってもよい。
【0043】
(探触子による走査方法の詳細)
次に、探触子により被検体の走査を行う方法を説明する。
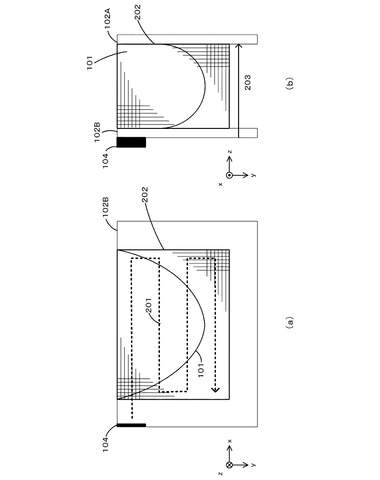
図2は、第一の実施形態における超音波探触子の、2次元平面での測定方法を説明する概念図である。図2(a)は保持された被検体101を、探触子が接する保持板102B側から見た正面図、図2(b)はその側面図をそれぞれ示している。破線で示した201は超音波探触子の移動軌跡を示しており、この2次元走査によって得られる測定データの範囲を202で表す。データの取得領域はユーザが任意に設定することができる。
【0044】
測定データの取得は、移動軌跡201に沿って、探触子をx軸方向に移動させながら超音波信号の取得ピッチに従って超音波信号を取得する主走査と、探触子をy軸正方向に一定の距離だけ移動する副走査を繰り返して行われる。なお、主走査方向(x軸方向)が本発明における第二の方向、主走査方向に交差する副走査方向(y軸方向)が本発明における第一の方向である。なお、以降の説明において、一回の電子走査で取得することができる、図2におけるy−z軸平面から取得できる平面画像を、断層画像と称する。
【0045】
主走査方向(x軸方向)に探触子を走査させ、複数枚の断層画像を取得し、取得した断層画像をx軸に沿って並べることで、電子走査幅をy軸方向の幅とする3次元超音波画像を取得することができる。探触子を一定の距離ずつy軸方向に移動させて繰り返し走査を行い、取得した複数の超音波画像を結合することで、目的とするサイズの3次元超音波画像が生成される。
【0046】
測定データ範囲202から取得される測定データは、画像診断に好適なボクセルピッチで整列したデータで構成される。x軸、y軸、z軸の各軸のデータピッチは、例えば、x軸方向のピッチは超音波画像の解像度の逆数、y軸のピッチは探触子104から送信される隣り合った超音波ビーム間の距離、そしてz軸方向のデータピッチは超音波信号のサンプリング周期に比例した値となる。
【0047】
第一の実施形態では、図2(b)のように、測定深度203を、被検体101の保持距離と保持板102Bの厚さの距離の和と定義する。
【0048】
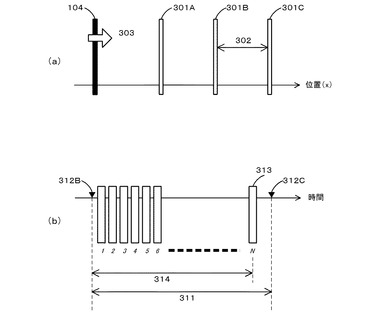
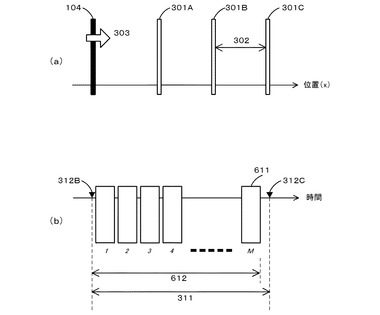
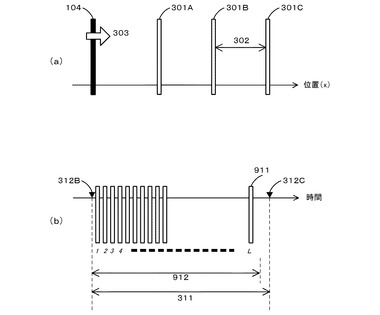
超音波信号の取得ピッチと電子走査に係る信号取得時間の関係を、図3を用いて説明する。図3(a)は、探触子104の主走査方向の移動と超音波信号の取得ピッチの位置関係を、図3(b)は探触子の移動と超音波信号の取得時間の時間関係を示している。
【0049】
301A、301B、301Cは、超音波信号の取得開始位置を示しており、301A〜Cの間隔は、一つの断層画像に対応する超音波信号のx軸方向の取得ピッチ302である。超音波信号の取得開始位置を、以降、信号取得開始位置と称する。探触子104は、一定の移動速度303で主走査方向に移動しながら、301A〜301Cの位置で電子走査を開始する。探触子104は、301A〜301Cの各ポイントにおいて、副走査方向に配置されている複数の音響素子を用いて、既定の本数の超音波ビームを送信し、次のポイントまでに、送信した全ての超音波ビームに対する反射波を取得する。
【0050】
副走査方向に超音波ビームの送受信を順次行うことにより、301A〜301Cの各ポイントにおいて、2次元の断層画像が一枚ずつ取得される。取得ピッチ302は、取得すべき被検体情報の分解能、つまり超音波画像の解像度の逆数をとることにより求めることができる。超音波ビームの本数は、装置ごとに既定の本数が定まっており、必要に応じて増減させることができる。当該既定の本数が、本発明における基準音響波ビーム数である。詳細については後述する。
【0051】
312Bと312Cは、それぞれ信号取得開始位置301Bと301Cに対応した、時間軸上の超音波信号の取得開始時刻を表している。ピッチ302を移動速度303で除することによって、ピッチ302を得るための超音波信号の取得周期311が決まる。この311の時間内に電子走査を完了、つまり送信した全ての超音波ビームについて反射波を取得しなければならない。取得周期311が、本発明における第一の時間である。
【0052】
送受信時間313は、測定深度203を測定する1回の超音波ビームの送信と超音波信号の受信にかかる時間を示しており、横幅がその送受信時間に相当する。電子走査によって一枚の断層画像を取得するためには、複数の超音波ビームを送信し、送信した超音波ビームに対応する反射波を受信しなければならないため、一回の電子走査に必要な時間は信号取得時間314で表される。信号取得時間314は第一の時間内、つまり周期311よりも短くなければならず、また、次の超音波信号の取得に備えた装置の動作時間として若干の余裕時間を設けておくことが好ましい。
超音波ビームの本数をNとし、超音波ビームを1本送信してから、当該超音波ビームに対応する反射波を得るまでの時間をtとすると、信号取得時間314は、tの合計であるためN×tと表すことができる。信号取得時間314が、本発明における第二の時間であ
る。
【0053】
より具体的に例を挙げる。超音波ビームの本数をN、生体内の音速をvb、測定深度をdとすると、t=2d/vbであるため、信号取得時間314は、N×(2d/vb)…式(1)と表すことができる。
また、画像解像度の逆数である超音波信号の取得ピッチをL、探触子の移動速度をuとすると、周期311は、L/u…式(2)と表すことができる。
つまり、電子走査を行う際は、N×(2d/vb)≦(L/u)…式(3)という関係を満たす必要がある。
【0054】
ここで、基準測定深度について説明する。基準測定深度とは、装置に既定の副走査方向に沿った超音波ビームの本数、画像解像度、および探触子の移動速度を両立させることができる最大の深度を表す値であり、測定装置に固有な値である。すなわち、式(3)を満たす最大の測定深度dが基準測定深度である。
なお、基準測定深度は、装置として好適な最大測定深度を表すものであり、装置設計上の最大深度ではない。乳房内の嚢腫の大きさや硬さなどの被検体の状態や、被検者の負担を考慮し、保持制御部103は、被検体の保持間隔を、前述した基準測定深度以上にすることも可能である。以降、測定深度203が、基準測定深度であるものとして説明を続ける。
【0055】
ここで、基準測定深度203を超える深度を測定しようとした場合、超音波ビームの送受信時間313が長くなるため、超音波信号の取得時間314が周期311を上回る可能性が出てくる。また、測定深度はそのままに超音波ビームの数を増やそうとした場合も同様である。この場合、ピッチ302に従って次の超音波信号を取得することができなくなるため、超音波画像の解像度を維持できなくなってしまう。
【0056】
以上のように、画像解像度と、探触子の移動速度が固定である場合、測定深度と、副走査方向に沿った超音波ビームの本数(電子走査幅)との間には制約関係があり、互いに条件を満たす必要があることがわかる。
【0057】
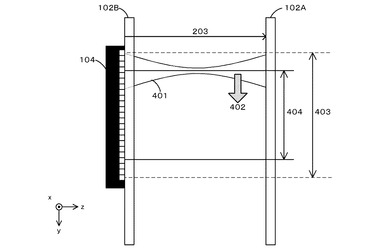
次に、超音波信号の取得方法を、装置を側方から見た図である図4を参照しながら説明する。図4は、第一の実施形態における測定データを構成する、一つの超音波信号の取得方法を説明する概念図である。
【0058】
探触子104は、直線状に整列された複数の音響素子により構成される。その中の、連続して並んだ一部の複数の音響素子群を用いて超音波ビーム401を形成し、超音波ビーム401を、副走査方向402に沿って移動させていくことにより電子走査を行う。一回の電子走査により、探触子104の幅とほぼ一致する幅403の断層画像を生成するのに必要な超音波信号を取得することができる。
【0059】
ただし、探触子104の端部では超音波ビームを形成するのに十分な開口(音響素子群の幅)が得られないため、十分な開口を得られる場合に比べて、取得される被検体情報の信頼性が劣るという性質がある。そのため、探触子端部を使用した電子走査が避けられない場合を除いて、通常は十分な開口が得られる幅404の中で超音波信号を取得することが好ましい。保持板により乳房を保持して診断を行う乳がん診断では、乳房の身体側である基底部の測定が探触子端部を使用する領域に相当する。
【0060】
例えば、全128素子、素子ピッチが0.25mmで配列された探触子を用いた場合、32素子を使用して超音波ビーム401を形成して電子走査を行うと、幅403は32mm、幅404は24mmとなる。探触子両端から16素子分ずつ、すなわち両端から4m
mずつが十分な開口を得られない領域になる。よって、電子走査を行う幅は、超音波ビームを形成するのに十分な開口を得られる24mmを上限とすることが好ましい。
【0061】
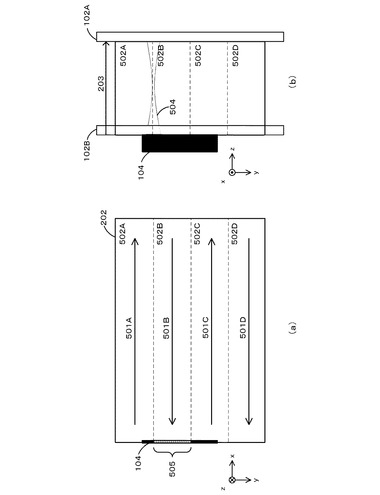
続いて、基準測定深度における超音波信号の取得方法を、図5を用いて説明する。図5(a)は、図2(a)と同様に、保持された被検体101を探触子が接する保持板102B側から見た正面図、図5(b)はその側面図をそれぞれ示している。なお、被検体101は図示していない。
【0062】
501A、501B、501C、501Dは、各y軸位置(探触子の副走査位置)における探触子の移動軌跡(主走査)を、502A、502B、502C、502Dは、各y軸位置で取得される超音波画像の領域を示している。
【0063】
電子走査幅505は、領域502A〜502Dを取得するための超音波ビームの電子走査幅を示している。この電子走査幅505は、前述したように、測定深度(本例においては基準測定深度203と同値)と探触子104の移動速度303、そして超音波信号の取得ピッチ302との関係で決めることができる。
【0064】
本例では、測定深度が基準測定深度を超えていないため、超音波ビームの数および電子走査幅の調整は行わない。信号取得時間314が、周期311を超えないようにあらかじめ設定された超音波ビームの本数を用いて電子走査を行う。
【0065】
移動制御部109が、走査制御部110に対して、決定した電子走査幅での走査を指示することで、電子走査を実行する。また、同時に移動制御部109が、移動機構108に対して探触子104をx軸方向およびy軸方向に移動させる指示を行う。詳細な処理フローについては後述する。
【0066】
図5の例では、決定された電子走査幅が、走査領域が持つy軸方向の長さの1/4であるため、超音波データを取得するためにはx軸方向の探触子の走査(主走査)を4回繰り返すことになる。
【0067】
以上、説明してきたように、本実施形態に係る超音波測定装置は、超音波信号の取得周期を守るように超音波ビームを送信し、対応する超音波信号を取得していく。これを、探触子を動かしながら複数の信号取得開始位置で繰り返すことで、超音波データを生成する。
【0068】
(基準測定深度を超える場合の対応例)
次に、測定対象の深さが基準測定深度を超える場合の例を説明する。
図6は、第一の実施形態における、基準測定深度を超える被検体深部を測定する場合の超音波信号の取得ピッチと、電子走査に係る信号取得開始時間の関係を説明する概念図である。
【0069】
基準測定深度203より深い測定深度に対して測定を行いたい場合であっても、超音波信号の取得は、図3の場合と同じように、超音波信号取得周期311の時間内で完了させなければならない。
【0070】
送受信時間611は、基準測定深度より深い領域を測定する1回の超音波ビームの送信と超音波信号の受信にかかる時間を示しており、横幅がその送受信時間に相当する。つまり、被検体深部を測定するための送受信時間が、図3(b)に比べて長くかかることがわかる。
【0071】
そのため、超音波信号の取得周期311の時間内で超音波信号の取得を完了させるためには、走査を行うための超音波ビームの数を、本来の超音波ビームの数であるN個よりも少なく制限して、周期311に収める必要がある。超音波ビーム数の計算法は前述の方法と同様である。本例の場合、超音波ビームの数を、本来の超音波ビームの数であるN個より少ないM個に制限するものとする。
すなわち、測定深度をDとして式(3)を適用すると、副走査方向に沿った超音波ビームの数であるMは、M≦(L/u)/(2D/vb)を満たす最大の整数となる。
【0072】
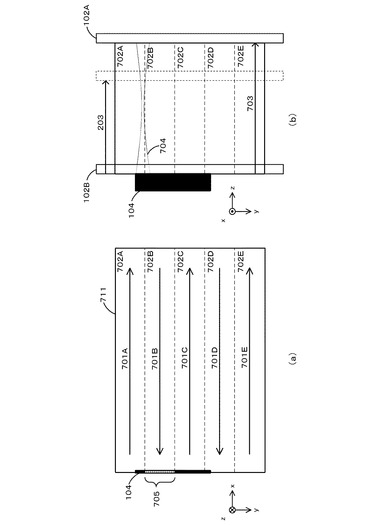
続いて、基準測定深度を超える被検体深部を測定する場合の超音波信号の取得方法を、図7を用いて説明する。図5と同様に、図7(a)は保持された被検体101を探触子が接する保持板102B側から見た正面図、図7(b)はその側面図をそれぞれ示している。
【0073】
701A、701B、701C、701D、701Eは各y軸位置(探触子の副走査位置)における探触子の移動軌跡を、702A、702B、702C、702D、702Eは各y軸位置で取得される超音波画像の領域を示している。
【0074】
測定深度703は、基準測定深度203を超える被検体深部を測定するための深度を示しており、測定深度703を測定可能なようにビーム形状を制御された超音波ビーム704により測定を行う。
【0075】
本例においては、移動制御部109が、式(1)と式(2)の関係から超音波ビームの本数を決定し、超音波ビームの本数に、探触子104が有する音響素子の間隔を乗ずることで電子走査幅を算出する。
電子走査幅705は、領域702A〜702Eから超音波画像を取得するための電子走査幅を示している。本例では超音波ビームの数が制限されるため、電子走査幅705は、図5における電子走査幅505に対して狭くなる。
【0076】
つまり、探触子のy軸方向へのシフト量が小さくなるため、基準測定深度203を超える測定深度703の超音波測定を行い、超音波データ711を取得するためには、x軸方向の探触子の走査回数を多くしなければならない。本例では、決定された電子走査幅が、走査領域が持つy軸方向の長さの1/5であるため、x軸方向の探触子の走査(主走査)を5回繰り返すことになる。
【0077】
以上、説明したように、基準測定深度を超える測定深度を得たい場合、1回の電子走査における超音波ビームの数を減らすことによって処理時間を確保するのが第一の実施形態である。
【0078】
(処理フローチャート)
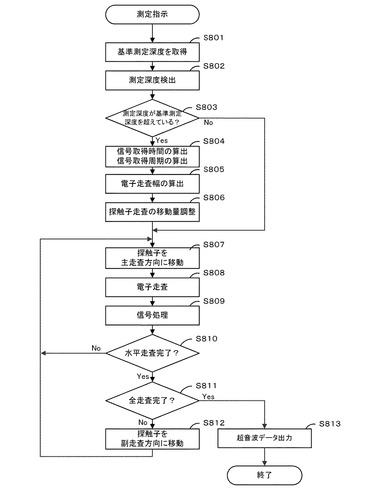
第一の実施形態に係る超音波測定装置の動作を、測定装置100の処理フローチャートである図8を参照しながら詳細に説明する。なお、検査者による被検体の保持などの測定準備作業は、本フローチャートの開始前に完了しているものとする。
【0079】
まず、検査者が操作部124により超音波データの取得を指示すると、指示を受けた制御部111が、移動制御部109に対して超音波データの取得開始を指示する。
【0080】
画像処理装置120からの超音波測定の開始指示と共に、目的とする3次元超音波画像に必要な超音波信号の取得ピッチなど、超音波画像の取得に必要なパラメータが、画像処理装置120から制御部111へ送信される。なお、当該パラメータは検査者により指定されてもよいし、目的とする3次元超音波画像のボクセルピッチから決定されてもよい。
【0081】
移動制御部109は、取得開始指示を受信すると、装置に固有な基準測定深度を取得し(S801)、続いて保持制御部103から出力される、被検体の保持距離を含む情報を受信して測定深度の情報を取得する(S802)。
【0082】
続いて、移動制御部109は、測定深度が基準測定深度を超えているかどうかを判定する(S803)。超えている場合は、ステップ804へ処理を移行し、電子調査幅の調整および探触子走査の移動量調整を行う。超えていない場合は、ステップ807へ処理を移行して、電子走査幅の調整および探触子走査の移動量調整を行わずに、既定の本数の超音波ビームを使用して超音波データの取得を行う。
【0083】
測定深度が基準測定深度を超えている場合、移動制御部109は、ステップS802で算出した測定深度を測定するのに必要な信号取得時間を、式(1)によって算出する(S804)。なお、信号取得時間は測定深度と被検体101や保持板102B内の音速を考慮して算出されるが、保持圧力によって被検体101内での音速を補正することで、超音波送受信時間を調整してもよい。
【0084】
同時に、移動制御部109は、生成すべき超音波画像の解像度と、音響波探触子の移動速度に基づいて、制約時間、すなわち超音波信号の取得周期311を取得する。制約時間は、式(2)によって、すなわち装置仕様として決められている探触子104の主走査方向の移動速度303と、取得する超音波信号の取得ピッチ302によって定められる。
【0085】
続いて、移動制御部109は、取得した制約時間と、算出した信号取得時間を比較し、式(3)を満たすように超音波ビームの数を決定し、電子走査幅を決定する(S805)。ステップS802〜S805の処理が、本発明を適用することができる被検体情報取得装置における送信音響波調整手段に相当する。
【0086】
続いて、移動制御部109は、ステップ805で調整した電子走査幅から、図7のように探触子104の探触子走査における副走査方向の繰り返し数を調整する(S806)。もし、超音波データの取得領域と、探触子104の副走査方向のシフト量とが一致しない場合、最後の副走査位置における電子走査幅を調整してもよい。また、最後の副走査位置における電子走査幅の調整量を、全ての副走査位置に均等に配分することで全ての電子走査幅が同じなるように調整してもよい。ステップS806が完了すると、移動制御部109は探触子104による2次元走査を開始する。
【0087】
ステップS807では、移動制御部109が移動機構108を介して、探触子104を主走査方向に移動制御し、次の信号取得開始位置に移動させる。
【0088】
次の信号取得開始位置に到達すると、移動制御部109が走査制御部110に対して、ステップS805で決定した電子走査幅での電子走査を指示する(S808)。
【0089】
電子走査が終了すると、信号処理部107が、受信した超音波信号に対して受信フォーカス処理を行い記録する(S809)。この信号処理を行うことにより、一つの断層画像を生成するのに必要な情報が収集されたことになる。
【0090】
信号処理が完了すると、続いて移動制御部109が、探触子104の主走査方向の走査が完了したかを判定する(S810)。走査の完了は、ユーザに指定された超音波データの取得領域に対して主走査方向の移動が完了したかどうかで判定する。移動が完了した場合には、ステップ811へ処理を移行する。そうでない場合には、ステップ807へ処理を移行し、次の信号取得開始位置で超音波信号の取得を繰り返す。
【0091】
主走査方向の走査が完了すると、移動制御部109が、指定された超音波データ取得領域に対して全ての走査が完了したかどうかを判定する(S811)。全ての走査が完了した場合には、ステップ813へ処理を移行する。完了していない場合には、ステップS812へ処理を移行する。
【0092】
全ての走査が完了していない場合、移動制御部109が移動機構108を制御して、探触子104を副走査方向に一定の距離だけ移動させ、超音波データの取得動作を継続する(S812)。このように、ステップS807〜S812の処理を繰り返すことによって走査を行う。
【0093】
全ての走査が完了すると、制御部111が、取得した超音波データを画像処理装置120に対して出力する(S813)。
【0094】
以上の処理を行うことにより、基準測定深度を超えた超音波データの取得を実施できる。なお、ステップS806〜S813が、本発明を適用することができる被検体情報取得装置における走査手段に相当する。
【0095】
本実施形態によれば、超音波データを取得するために超音波探触子を2次元走査しながら超音波の測定を行う超音波測定装置において、基準測定深度を超える被検体深部の超音波データを取得することが可能となる。すなわち、信号処理を行う時間が不足するという問題を解決することができる。
【0096】
(第二の実施形態)
本発明の第二の実施形態を、図に従って説明する。
第二の実施形態の特徴は、基準測定深度よりも浅い領域から超音波データを取得する場合に、超音波信号の取得が早く完了することで生じる冗長な時間を活用する点にある。
【0097】
なお、第二の実施形態における超音波測定装置の構成(図1)と、超音波探触子の走査方法(図2)、電子走査方法の詳細(図4)は、第一の実施形態と同様であり、説明を省略する。
【0098】
図9は、基準測定深度よりも浅い領域の被検体を測定する場合の超音波信号の取得ピッチと、電子走査に係る信号取得時間の関係を説明する概念図である。
【0099】
測定深度が、基準測定深度203より浅い場合であっても、探触子104の移動速度303、および、x軸方向の超音波信号取得ピッチ302は同一である。そのため、信号取得開始位置312Bから超音波信号の取得を開始した場合、第一の実施形態と同様に、超音波信号の取得周期である311までに電子走査を完了できればよい。
【0100】
送受信時間911は、基準測定深度よりも浅い領域を測定する1回の超音波ビームの送信と超音波信号の受信にかかる時間を示しており、横幅がその送受信時間に相当する。浅い領域を測定する場合、超音波信号の送受信時間が短くなるため、同じ数の超音波ビームを送受信した場合、所要時間は送受信時間313を下回る。
つまり、超音波信号の取得周期311内で、基準測定深度を測定する場合よりも多くの超音波ビームを送受信することができる。超音波ビーム数の計算法は前述の方法と同様である。第二の実施形態の場合、超音波ビームの数を、本来の超音波ビームの数であるN個より多いL個にすることができる。
【0101】
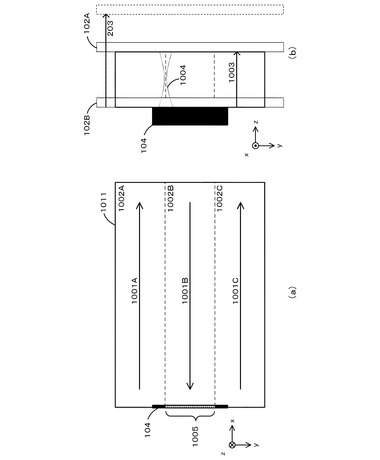
続いて、第二の実施形態における超音波データの取得方法を、図10を用いて説明する
。図10(a)は、保持された被検体101を探触子が接する保持板102Bの側から見た正面図、図10(b)はその側面図をそれぞれ示している。
【0102】
1001A、1001B、1001Cは探触子の副走査位置(y軸位置)における、探触子の移動軌跡を、1002A、1002B、1002Cは各副走査位置で取得される超音波画像の領域を示している。
【0103】
1003は、基準測定深度203より浅い深度を示しており、好適なビーム形状に制御された超音波ビーム1004により測定を行う。
【0104】
本例においても、移動制御部109が、式(1)と式(2)の関係から超音波ビームの本数を決定し、超音波ビームの本数に、探触子104が有する音響素子の間隔を乗ずることで電子走査幅を算出する。電子走査幅1005は、領域702A〜702Eを取得するための超音波ビームの電子走査幅である。本例では、基準測定深度を測定する場合と比較して超音波ビームの数を増やすことができるため、図5における電子走査幅505に対して電子走査幅は広くなる。
【0105】
したがって、基準測定深度203よりも浅い測定深度1003の超音波測定を行う場合、y軸方向の電子走査幅が広くなるため、x軸方向の走査はより少ない回数で済む。本例では、決定された電子走査幅が、走査領域が持つy軸方向の長さの1/3であるため、x軸方向の探触子の走査(主走査)を3回繰り返すことになる。
【0106】
第二の実施形態に係る超音波測定装置の動作を、図8のフローチャートに当てはめて説明する。ステップS802までの処理は、第一の実施形態と同様である。
第二の実施形態においては、ステップS803での比較判定を行わずにステップ804へ処理を移行し、電子走査幅の決定、および探触子走査における副走査方向の繰り返し数の調整を行う。
ステップS804以降の処理は、第一の実施形態と同様である。
【0107】
以上、図9と図10で説明したように、測定深度が浅い場合、電子走査幅を標準より広げ、探触子の走査軌道を調整することにより、超音波信号の取得周期311の時間を最大限に活用することができ、全体として超音波データの取得時間を短縮できる。
【0108】
なお、第一の実施形態においては、基準測定深度を測定する際に電子走査幅が最大となるように構成したが、本実施形態においては、音響素子を増やし、基準測定深度を測定する際よりも電子走査幅を大きくできるようにしておくことが望ましい。
【0109】
本実施形態によれば、超音波探触子を2次元走査しながら超音波の測定を行う超音波測定装置において、測定深度が想定よりも浅い場合、電子走査幅を広げることができる。その結果として、走査一回あたりの読み取り幅を広くすることが可能となり、超音波データの全体の取得時間を短縮することができる。
【0110】
なお、本実施形態では、測定深度が想定より浅い場合の作用および効果のみを説明したが、測定深度が想定より深い場合であってもよい。いずれの場合も、基準測定深度を用いることなく、常に式(3)を用いて超音波ビームの数を決定することができる。
【0111】
上記の実施形態はあくまでも一例であって、本発明はその要旨を逸脱しない範囲内で適宜変更して実施しうるものである。
たとえば、例示した実施形態では、電子走査幅を変化させることで超音波ビームの数を調整したが、例えば超音波ビームを間引く、すなわち、超音波画像の解像度を落とす等の
方法によって、電子走査幅を維持してもよい。
【0112】
また、本発明を適用することができる被検体情報取得装置は、前述した実施形態の機能を実現するために、中央演算処理装置(CPU)および主記憶装置(RAM)、補助記憶装置(記憶媒体)を有していてもよい。このように構成した場合、先に説明したフローチャートに対応するプログラムコードが補助記憶装置に格納され、当該プログラムコードをCPUが読み出して実行することにより、前述した実施形態の機能が実現される。この場合、コンピュータ上で稼働しているオペレーティングシステム(OS)などが処理の一部または全部を行い、前述した実施形態の機能を実現してもよい。
【符号の説明】
【0113】
101・・・被検体、103・・・保持制御部、104・・・超音波探触子、107・・・信号処理部、108・・・移動機構、109・・・移動制御部、110・・・走査制御部、111・・・制御部
【技術分野】
【0001】
本発明は、被検体情報取得装置および被検体情報取得装置の制御方法に関する。
【背景技術】
【0002】
超音波を生体に対して送波し、反射してきた超音波を解析することで生体内の構造を画像化する超音波測定装置が医療現場で運用されている。超音波を生体に送波すると、生体内の音響インピーダンスの異なる境界面で超音波の反射が起こる。超音波測定装置は、この反射波を受信、解析することで被検体内の組織情報を得ることができる。
【0003】
超音波測定装置は、腫瘤の深さ方向(超音波ビームの送信方向)の位置や大きさを画像で認識できるという利点がある。また、超音波による音響的な測定を行うため、生体内の組織を非侵襲で測定することができ、患者への身体的負担の面でも大きな優位性を有している。
【0004】
希望する測定深度を設定し、フォーカシングを行う機能を有する超音波診断装置において、フレームレートを可及的に高くする技術が特許文献1に開示されている。特許文献1に開示されている超音波診断装置は、異なるフォーカス間での信号合成時の境界位置の深さに応じて、超音波送受信間隔を決定したうえで超音波の送受信を制御する。これにより、最適な超音波送受信間隔を設定することが可能となり、測定深度を一律とした場合と比べてフレームレートを向上させることができる。
【0005】
また、決まった一定の超音波送信周期で超音波の送受信を行う装置において、その送信周期の時間を有効に活用する技術が特許文献2に開示されている。特許文献2に開示されている技術によれば、超音波の送信周期が、測定に必要な超音波送受信時間の2倍以上ある場合に、送信周期の中で空いている時間を用いてインタリーブ走査を行う。これにより、測定時間を有効に使い、フレームレートを向上させることができる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2010−94171号公報
【特許文献2】特開平3−126442号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
従来の超音波測定装置には、被検体の測定に時間を要するという問題がある。例えば、乳がんの検診を行うマンモグラフィでは、測定のために被検部位である乳房を圧迫固定するが、被検者に圧迫による負担をかける時間は短い方が好ましい。
【0008】
一定間隔で整列した複数の断層画像により構成される3次元超音波画像の生成を行う超音波測定装置は、目的とする超音波画像のボクセルピッチに従って断層画像を一枚ずつ生成する必要がある。つまり、探触子を連続的に移動させながら、断層画像の生成に必要な超音波信号を順次取得しなければならないため、探触子が次の断層画像を取得する位置に達するまでに、断層画像一枚分の超音波信号を取得しなければならない。従って、測定時の探触子の移動速度は、上記の条件を満たす最高速度より速くすることができない。
【0009】
また、超音波信号の取得時間は、目的とする測定深度が深いほど、超音波の伝播に時間を要するため長くなる。つまり、測定深度が深くなるほど探触子の移動速度は遅くなる。
逆に、一定の移動速度を確保しようとした場合は、測定深度は制限されることになる。近年、超音波画像の高解像度化の要求が増しているが、これに対応して超音波信号をより細かいピッチで取得しようとした場合、断層画像一枚の処理に割り当てられる時間は短くなるため、測定ができる最大深度はより制限される。
【0010】
ここで探触子の移動速度について考える。画像の解像度から計算できる超音波信号の取得ピッチを、測定深度から計算できる超音波信号の取得に必要な時間で除したものが、探触子の移動速度となる。つまり、従来の被検体情報取得装置では、画像解像度が一定である場合、測定可能な深度を深く設定すれば探触子の移動が遅くなり、浅く設定すれば探触子の移動が速くなる。
【0011】
ここから、次のような問題点を導くことができる。
第一の問題は、測定可能な深度を深くすることで探触子の移動速度を遅く設定すると、超音波信号の取得時間が短い場合に無駄な時間が生じてしまうという点である。すなわち、3次元超音波画像の測定深さが浅い場合、処理を行わない冗長な時間が発生してしまう。
【0012】
第二の問題は、測定可能な深度を浅くすることで探触子の移動速度を速く設定すると、冗長な時間は無くなるが、超音波信号の取得に時間のかかる箇所の測定ができなくなるという点である。すなわち、3次元超音波画像の測定深さが深い場合、処理を行う時間が足りなくなる。
【0013】
この問題は、超音波信号の取得時間に応じて探触子の移動速度を可変とする、つまり、信号の取得に時間がかかる箇所は移動速度を遅く、時間がかからない箇所は移動速度を速くすることで解決するようにも思える。しかし、被検体情報取得装置は、超音波信号の取得ピッチが細かいため、探触子を加減速するための距離と時間を得ることが難しく、速度制御を容易に行うことができない。
また、探触子を連続的に移動させながら超音波ビームを送受信する場合、探触子の移動
速度を測定中に変更すると、断面方向の傾きが変化し、画像が歪んでしまうため、超音波画像ごとの比較が困難になる。このため、探触子の移動速度は、測定中は常に一定であることが好ましい。
【0014】
特許文献1および2に記載の発明は、ともにリアルタイム性を向上させ、画像取得時のフレームレートを改善することができるが、全体の走査時間について考慮されたものではないため、上記課題を解決することはできない。
【0015】
本発明は、上記課題を鑑み、測定深度に適した音響波データの取得方法を提供できる被検体情報取得装置を提供することを目的とする。
【課題を解決するための手段】
【0016】
上記課題を解決するために、本発明に係る被検体情報取得装置は、被検体情報を取得する被検体情報取得装置であって、複数の音響素子が、少なくとも第一の方向に沿って配列され、前記複数の音響素子により、音響波ビームの送信および被検体内部で反射した音響波の受信を、前記第一の方向に沿って順次行う音響波探触子と、前記第一の方向に交差する第二の方向を主走査方向とし、前記主走査方向に前記音響波探触子を所定の速度で移動させる走査手段と、前記音響波ビームの送信方向における被検体情報を取得するための測定深度の情報を取得し、前記測定深度と前記被検体情報の主走査方向の分解能と前記音響波探触子の移動速度に応じて、前記音響波ビームの前記第一の方向に沿った本数を決定する送信音響波調整手段と、を有することを特徴とする。
【0017】
また、本発明に係る被検体情報取得装置の制御方法は、複数の音響素子が、少なくとも第一の方向に沿って配列され、前記複数の音響素子により、音響波ビームの送信および被検体内部で反射した音響波の受信を、前記第一の方向に沿って順次行う音響波探触子を有し、前記第一の方向に交差する第二の方向を主走査方向とし、前記主走査方向に前記音響波探触子を所定の速度で移動させて被検体情報を取得する被検体情報取得装置の制御方法であって、前記音響波ビームの送信方向における被検体情報を取得するための測定深度の情報を取得するステップと、前記測定深度と前記被検体情報の主走査方向の分解能と前記音響波探触子の移動速度に応じて、前記音響波ビームの前記第一の方向に沿った本数を決定するステップと、を含むことを特徴とする。
【発明の効果】
【0018】
本発明によれば、測定深度に適した音響波データの取得方法を提供できる被検体情報取得装置を提供することができる。
【図面の簡単な説明】
【0019】
【図1】第一の実施形態における超音波測定装置のシステム構成図。
【図2】第一の実施形態における超音波測定の方法を説明する概念図。
【図3】第一の実施形態における最大深度での電子走査と信号取得時間の関係図。
【図4】第一の実施形態における電子走査の方法を詳細に説明する概念図。
【図5】第一の実施形態における最大深度での超音波データの取得方法説明図。
【図6】第一の実施形態における深度が深い場合の電子走査と信号取得時間の関係図。
【図7】第一の実施形態における深度が深い場合の超音波データ取得方法説明図。
【図8】第一の実施形態における超音波データの取得の流れを示すフローチャート。
【図9】第二の実施形態における深度が浅い場合の電子走査と信号取得時間の関係図。
【図10】第二の実施形態における深度が浅い場合の超音波データ取得方法説明図。
【発明を実施するための形態】
【0020】
(第一の実施形態)
以下に、本発明の第一の実施形態について図面を参照しながら説明する。
第一の実施形態に係る被検体情報取得装置は、被検体に音響波ビーム、すなわち超音波ビームを送信し、被検体内部で反射した反射波を受信して、被検体情報を画像データとして取得する超音波エコー技術を利用した超音波測定装置である。取得される被検体情報とは、被検体内部の組織の音響インピーダンスの違いを反映した情報である。
【0021】
なお、実施形態の説明において、主走査方向とは、探触子が移動しながら超音波信号を取得する方向を示す言葉とし、副走査方向とは、主走査方向に交差する方向を示す言葉とする。また、超音波データとは、測定対象の領域から取得される、3次元超音波画像を生成するために必要な全てのデータを示す言葉とする。また、超音波信号とは、一つまたは複数の音響素子が反射波を受信することで生成する信号を示す言葉とする。また、超音波ビームとは、複数の音響素子が、特定の一点に収束するように位相をずらして送信した超音波の集合を示す言葉とする。また、電子走査幅とは、測定のための超音波ビームが送信される、副走査方向に沿った幅を示す言葉とする。
【0022】
また、被検体情報取得装置が行う走査には、探触子を二次元平面上で機械的に移動させる機械走査と、複数の音響素子によって生成した超音波ビームを副走査方向にずらしながら送受信する電子走査の二種類がある。実施形態の説明においては、前者を探触子走査、後者を超音波走査と称する。
【0023】
図1は、第一の実施形態における超音波測定装置のシステム構成を表す図である。
第一の実施形態における超音波測定装置は、大きく分類して、測定装置100および画像処理装置120で構成される。測定装置100は、超音波によって被検体の測定を行う装置であり、画像処理装置120は測定装置100を操作し、測定されたデータを可視化するための装置である。測定装置100は、保持板102、保持制御部103、探触子104、超音波送信部105、超音波受信部106、信号処理部107、移動機構108、移動制御部109、走査制御部110、インタフェース112から構成される。
【0024】
画像処理装置120は、インタフェース121、画像構成部222、表示部223、操作部124から構成される。一般にパソコンやワークステーション等の高性能な演算処理機能やグラフィック表示機能を備える装置を用いる。以下、それぞれの構成を説明しながら、被検体の計測方法について説明する。
【0025】
まず、測定装置100の構成を説明する。
被検体101は、人体、具体的には人体や動物の乳房や指、手足などの診断の対象部位が想定される。検査部を両側から挟む形で装置に固定する保持板102A、102Bに固定される。
【0026】
保持板102は、被検体の少なくとも一部の形状を一定に保ち、被検体と探触子との間に設けられる保持部材であり、102Aと102Bの2枚1対で構成される。保持部材で両側から被検体を挟持すると、測定中での位置が固定され、体動などによる位置誤差を低減することができる。また、保持により被検体の深部まで超音波を効率よく到達させることができる。
【0027】
保持部材としては、超音波の伝播効率が高く、かつ、被検体や探触子との音響整合性が高い部材を用いることが好ましい。特に保持板102Bは、超音波の伝播経路に位置するため、超音波探触子との音響整合性が高い部材であることが好ましい。音響整合性を高めることを目的に、保持板と被検体、保持板と探触子との間にジェルなどの音響整合材を介在させてもよい。保持板は、保持制御部103により、測定に好適な保持間隔に制御される。保持板102Aと102Bを区別する必要がない場合はまとめて保持板102と表記する。
【0028】
保持制御部103は、被検者への負担や測定深度に合わせて、被検体101の保持状態を超音波測定に好適な保持間隔と保持圧力に調整する。また、超音波測定中は、被検体の保持状態を一定に保つように制御する。また、超音波測定時に被検体の保持情報(保持距離と保持圧力)を移動制御部109に出力する。本発明において測定深度とは、被検体情報を取得するための深さ方向(超音波ビームの送信方向)の距離である。第一の実施形態では、この保持距離と保持板102Bの厚さを加えたものを超音波測定の測定深度と定義する。
【0029】
探触子104は、超音波源および複数の音響素子が配列して構成され、被検体に対して超音波ビームの送信を行い、被検体内部において反射された超音波エコーを受信して電気信号に変換する手段である。一般的な超音波探触子は、圧電セラミックス(PZT)を利用した変換素子や、マイクロフォン静電容量型の変換素子などが使用される。
また、静電容量型のCMUT(Capacitive Micromachined Ultrasonic Transducer)、磁性膜を用いるMMUT(Magnetic MUT)なども用いることができる。また、圧電薄膜を用いるPMUT(Piezoelectric MUT)など、超音波探触子にはどのような方式のものを
用いてもよい。
【0030】
また、2次元平面状の保持板102Bに探触子を接触させ、移動しながら測定を行う超
音波測定装置では、平行な超音波ビームで均一な画質の断層画像を生成できるリニア走査型の探触子が一般的に使用される。第一の実施形態では、説明のため音響素子を直線状に一列に配列した一次元探触子を使用する例について説明する。ただし、本発明を適用することができる被検体情報取得装置では、2次元上に配列されたアレイ型探触子(1.5D探触子も含む)を使用して測定を行う構成でもよい。なお、実施形態の説明では、超音波ビームの移動を電子スイッチ等を切り替えることによって実現するため、超音波走査のことを電子走査という言葉を用いて説明する。
【0031】
走査制御部110は、探触子104を構成する各々の音響素子に印加する駆動信号を生成して、送信される超音波の周波数及び音圧を制御する。また、超音波ビームの送信方向を設定して、送信方向に対応して送信遅延パターンを選択する送信制御機能と、超音波信号の受信方向を設定して、受信方向に対応して受信遅延パターンを選択する受信制御機能とを備えている。送信遅延パターンとは、複数の音響素子から送信される超音波によって所定の方向に超音波ビームを形成するために、複数の駆動信号に与えられる遅延時間のパターンである。また、受信遅延パターンとは、複数の音響素子によって検出される超音波信号に対して任意の方向からの超音波信号を抽出するために、複数の受信信号に与えられる遅延時間のパターンである。これらの送信遅延パターンと受信遅延パターンは別途記憶手段(不図示)に記憶されている。
【0032】
超音波送信部105は、走査制御部110によって生成された駆動信号を、探触子104を構成する個々の音響素子に対して印加する。
【0033】
超音波受信部106は、探触子104を構成する複数の音響素子が検出したアナログ信号を増幅する信号増幅部と、アナログ信号をデジタル信号に変換するA/D変換部から構成され、受信した信号をデジタル信号に変換する。
【0034】
信号処理部107は、走査制御部110により選択された受信遅延パターンに基づいて、超音波受信部106により生成された信号に対してそれぞれの遅延時間に対応させて、各々の信号を加算することにより受信フォーカス処理を行う。この処理により、焦点が絞り込まれた超音波信号が生成される。また、信号処理部107は、測定深度によらずに均一なコントラストをもつ断層画像を生成するために、超音波の反射位置の深度に応じて増幅利得を増減するTGC(Time Gain Control)制御などを行う。
なお、第一の実施形態における超音波信号は、最終的にBモードの断層画像を生成できるような信号であれば、どのような形態であってもよい。例えば、ローパスフィルタなどで包絡線検波処理を施した包絡線データや、その包絡線データに対して、対数圧縮やゲイン調整などの処理を行ったデータなどであってもよい。
【0035】
移動機構108は、モータなどの駆動部とその駆動力を伝達する機械部品から構成されており、移動制御部109の指示を受け、保持板102B上で探触子104を移動させるための駆動機構である。また、探触子104の位置情報を検出して移動制御部109へ出力する。
【0036】
移動制御部109は、探触子104を保持板上で2次元的に移動させるように移動機構108を制御する。また、探触子104が超音波信号の取得開始位置に達すると、走査制御部110に対して超音波信号の取得指示命令を発行する。探触子104を2次元的に移動させることで、広い測定領域を得ることができ、例えば乳がん診断ではフルブレストでの超音波データの取得が可能となる。また、移動制御部109は、保持制御部103から受けた保持情報に基づいて、測定深度および超音波送受信時間を算出し、超音波ビームの電子走査幅および探触子走査の移動量調整を行う。詳細な動作については後述する。
【0037】
制御部111は、画像処理装置120からの測定開始指示や各種要求を受け付け、超音波測定装置全体を管理、制御する。走査制御部110への測定開始の伝達の他にも、装置個体を識別する識別情報や個体固有に設定される情報の管理、装置の状態の監視、それらの情報を画像処理装置120へ伝送する役割などを持っている。
【0038】
インタフェース112は、超音波データと装置情報を画像処理装置120に送信し、画像処理装置120から各種指示を受信するための入出力手段である。インタフェース112は、画像処理装置120のインタフェース121と共に、測定装置100と画像処理装置120との間のデータ通信を行う役割を有する。リアルタイム性を確保でき、かつ大容量の伝送が可能な通信規格を採用することが好ましい。
【0039】
次に、画像処理装置120の構成を説明する。
インタフェース121は、超音波測定装置のインタフェース112と同等の機能を有し、インタフェース112と連携して超音波データや装置への各種指示などを双方向に伝送する。
【0040】
画像構成部222は、伝送された超音波データに基づいて、被検体内の組織情報を画像化し、3次元超音波画像を構成する。また、構成した超音波画像に対して、輝度の調整や歪補正、注目領域の切り出しなどの各種補正処理を適用して、より診断に好ましい形態にする機能を有していてもよい。
また、ユーザによる操作部224の操作に従って、超音波画像の構成に関するパラメータや表示画像の調整などを行う役割も持つ。なお、表示すべき超音波画像のボクセルピッチ(解像度)は、超音波信号の取得ピッチと一致させることが好ましい。余分な補間処理などを省くことができ、取得した超音波信号を最も有効に利用できるためである。
【0041】
表示部223は、画像構成部222により構成された3次元超音波画像を表示する表示装置である。また、操作部224は、超音波測定装置の操作ソフトウェア(不図示)上で、ユーザが測定位置の指定、測定の調整など装置の操作や超音波画像に対する画像処理操作を行うための入力装置である。
【0042】
本実施形態に係る超音波装置は、以上の構成を有することで、測定深度に適した超音波データを取得し、3次元超音波画像を利用者に提示することができる。なお、図1では画像処理装置120を外部装置として、超音波測定装置と画像処理装置を別々のハードウェア構成としているが、それぞれが有する機能を集約して一体化した構成であってもよい。
【0043】
(探触子による走査方法の詳細)
次に、探触子により被検体の走査を行う方法を説明する。
図2は、第一の実施形態における超音波探触子の、2次元平面での測定方法を説明する概念図である。図2(a)は保持された被検体101を、探触子が接する保持板102B側から見た正面図、図2(b)はその側面図をそれぞれ示している。破線で示した201は超音波探触子の移動軌跡を示しており、この2次元走査によって得られる測定データの範囲を202で表す。データの取得領域はユーザが任意に設定することができる。
【0044】
測定データの取得は、移動軌跡201に沿って、探触子をx軸方向に移動させながら超音波信号の取得ピッチに従って超音波信号を取得する主走査と、探触子をy軸正方向に一定の距離だけ移動する副走査を繰り返して行われる。なお、主走査方向(x軸方向)が本発明における第二の方向、主走査方向に交差する副走査方向(y軸方向)が本発明における第一の方向である。なお、以降の説明において、一回の電子走査で取得することができる、図2におけるy−z軸平面から取得できる平面画像を、断層画像と称する。
【0045】
主走査方向(x軸方向)に探触子を走査させ、複数枚の断層画像を取得し、取得した断層画像をx軸に沿って並べることで、電子走査幅をy軸方向の幅とする3次元超音波画像を取得することができる。探触子を一定の距離ずつy軸方向に移動させて繰り返し走査を行い、取得した複数の超音波画像を結合することで、目的とするサイズの3次元超音波画像が生成される。
【0046】
測定データ範囲202から取得される測定データは、画像診断に好適なボクセルピッチで整列したデータで構成される。x軸、y軸、z軸の各軸のデータピッチは、例えば、x軸方向のピッチは超音波画像の解像度の逆数、y軸のピッチは探触子104から送信される隣り合った超音波ビーム間の距離、そしてz軸方向のデータピッチは超音波信号のサンプリング周期に比例した値となる。
【0047】
第一の実施形態では、図2(b)のように、測定深度203を、被検体101の保持距離と保持板102Bの厚さの距離の和と定義する。
【0048】
超音波信号の取得ピッチと電子走査に係る信号取得時間の関係を、図3を用いて説明する。図3(a)は、探触子104の主走査方向の移動と超音波信号の取得ピッチの位置関係を、図3(b)は探触子の移動と超音波信号の取得時間の時間関係を示している。
【0049】
301A、301B、301Cは、超音波信号の取得開始位置を示しており、301A〜Cの間隔は、一つの断層画像に対応する超音波信号のx軸方向の取得ピッチ302である。超音波信号の取得開始位置を、以降、信号取得開始位置と称する。探触子104は、一定の移動速度303で主走査方向に移動しながら、301A〜301Cの位置で電子走査を開始する。探触子104は、301A〜301Cの各ポイントにおいて、副走査方向に配置されている複数の音響素子を用いて、既定の本数の超音波ビームを送信し、次のポイントまでに、送信した全ての超音波ビームに対する反射波を取得する。
【0050】
副走査方向に超音波ビームの送受信を順次行うことにより、301A〜301Cの各ポイントにおいて、2次元の断層画像が一枚ずつ取得される。取得ピッチ302は、取得すべき被検体情報の分解能、つまり超音波画像の解像度の逆数をとることにより求めることができる。超音波ビームの本数は、装置ごとに既定の本数が定まっており、必要に応じて増減させることができる。当該既定の本数が、本発明における基準音響波ビーム数である。詳細については後述する。
【0051】
312Bと312Cは、それぞれ信号取得開始位置301Bと301Cに対応した、時間軸上の超音波信号の取得開始時刻を表している。ピッチ302を移動速度303で除することによって、ピッチ302を得るための超音波信号の取得周期311が決まる。この311の時間内に電子走査を完了、つまり送信した全ての超音波ビームについて反射波を取得しなければならない。取得周期311が、本発明における第一の時間である。
【0052】
送受信時間313は、測定深度203を測定する1回の超音波ビームの送信と超音波信号の受信にかかる時間を示しており、横幅がその送受信時間に相当する。電子走査によって一枚の断層画像を取得するためには、複数の超音波ビームを送信し、送信した超音波ビームに対応する反射波を受信しなければならないため、一回の電子走査に必要な時間は信号取得時間314で表される。信号取得時間314は第一の時間内、つまり周期311よりも短くなければならず、また、次の超音波信号の取得に備えた装置の動作時間として若干の余裕時間を設けておくことが好ましい。
超音波ビームの本数をNとし、超音波ビームを1本送信してから、当該超音波ビームに対応する反射波を得るまでの時間をtとすると、信号取得時間314は、tの合計であるためN×tと表すことができる。信号取得時間314が、本発明における第二の時間であ
る。
【0053】
より具体的に例を挙げる。超音波ビームの本数をN、生体内の音速をvb、測定深度をdとすると、t=2d/vbであるため、信号取得時間314は、N×(2d/vb)…式(1)と表すことができる。
また、画像解像度の逆数である超音波信号の取得ピッチをL、探触子の移動速度をuとすると、周期311は、L/u…式(2)と表すことができる。
つまり、電子走査を行う際は、N×(2d/vb)≦(L/u)…式(3)という関係を満たす必要がある。
【0054】
ここで、基準測定深度について説明する。基準測定深度とは、装置に既定の副走査方向に沿った超音波ビームの本数、画像解像度、および探触子の移動速度を両立させることができる最大の深度を表す値であり、測定装置に固有な値である。すなわち、式(3)を満たす最大の測定深度dが基準測定深度である。
なお、基準測定深度は、装置として好適な最大測定深度を表すものであり、装置設計上の最大深度ではない。乳房内の嚢腫の大きさや硬さなどの被検体の状態や、被検者の負担を考慮し、保持制御部103は、被検体の保持間隔を、前述した基準測定深度以上にすることも可能である。以降、測定深度203が、基準測定深度であるものとして説明を続ける。
【0055】
ここで、基準測定深度203を超える深度を測定しようとした場合、超音波ビームの送受信時間313が長くなるため、超音波信号の取得時間314が周期311を上回る可能性が出てくる。また、測定深度はそのままに超音波ビームの数を増やそうとした場合も同様である。この場合、ピッチ302に従って次の超音波信号を取得することができなくなるため、超音波画像の解像度を維持できなくなってしまう。
【0056】
以上のように、画像解像度と、探触子の移動速度が固定である場合、測定深度と、副走査方向に沿った超音波ビームの本数(電子走査幅)との間には制約関係があり、互いに条件を満たす必要があることがわかる。
【0057】
次に、超音波信号の取得方法を、装置を側方から見た図である図4を参照しながら説明する。図4は、第一の実施形態における測定データを構成する、一つの超音波信号の取得方法を説明する概念図である。
【0058】
探触子104は、直線状に整列された複数の音響素子により構成される。その中の、連続して並んだ一部の複数の音響素子群を用いて超音波ビーム401を形成し、超音波ビーム401を、副走査方向402に沿って移動させていくことにより電子走査を行う。一回の電子走査により、探触子104の幅とほぼ一致する幅403の断層画像を生成するのに必要な超音波信号を取得することができる。
【0059】
ただし、探触子104の端部では超音波ビームを形成するのに十分な開口(音響素子群の幅)が得られないため、十分な開口を得られる場合に比べて、取得される被検体情報の信頼性が劣るという性質がある。そのため、探触子端部を使用した電子走査が避けられない場合を除いて、通常は十分な開口が得られる幅404の中で超音波信号を取得することが好ましい。保持板により乳房を保持して診断を行う乳がん診断では、乳房の身体側である基底部の測定が探触子端部を使用する領域に相当する。
【0060】
例えば、全128素子、素子ピッチが0.25mmで配列された探触子を用いた場合、32素子を使用して超音波ビーム401を形成して電子走査を行うと、幅403は32mm、幅404は24mmとなる。探触子両端から16素子分ずつ、すなわち両端から4m
mずつが十分な開口を得られない領域になる。よって、電子走査を行う幅は、超音波ビームを形成するのに十分な開口を得られる24mmを上限とすることが好ましい。
【0061】
続いて、基準測定深度における超音波信号の取得方法を、図5を用いて説明する。図5(a)は、図2(a)と同様に、保持された被検体101を探触子が接する保持板102B側から見た正面図、図5(b)はその側面図をそれぞれ示している。なお、被検体101は図示していない。
【0062】
501A、501B、501C、501Dは、各y軸位置(探触子の副走査位置)における探触子の移動軌跡(主走査)を、502A、502B、502C、502Dは、各y軸位置で取得される超音波画像の領域を示している。
【0063】
電子走査幅505は、領域502A〜502Dを取得するための超音波ビームの電子走査幅を示している。この電子走査幅505は、前述したように、測定深度(本例においては基準測定深度203と同値)と探触子104の移動速度303、そして超音波信号の取得ピッチ302との関係で決めることができる。
【0064】
本例では、測定深度が基準測定深度を超えていないため、超音波ビームの数および電子走査幅の調整は行わない。信号取得時間314が、周期311を超えないようにあらかじめ設定された超音波ビームの本数を用いて電子走査を行う。
【0065】
移動制御部109が、走査制御部110に対して、決定した電子走査幅での走査を指示することで、電子走査を実行する。また、同時に移動制御部109が、移動機構108に対して探触子104をx軸方向およびy軸方向に移動させる指示を行う。詳細な処理フローについては後述する。
【0066】
図5の例では、決定された電子走査幅が、走査領域が持つy軸方向の長さの1/4であるため、超音波データを取得するためにはx軸方向の探触子の走査(主走査)を4回繰り返すことになる。
【0067】
以上、説明してきたように、本実施形態に係る超音波測定装置は、超音波信号の取得周期を守るように超音波ビームを送信し、対応する超音波信号を取得していく。これを、探触子を動かしながら複数の信号取得開始位置で繰り返すことで、超音波データを生成する。
【0068】
(基準測定深度を超える場合の対応例)
次に、測定対象の深さが基準測定深度を超える場合の例を説明する。
図6は、第一の実施形態における、基準測定深度を超える被検体深部を測定する場合の超音波信号の取得ピッチと、電子走査に係る信号取得開始時間の関係を説明する概念図である。
【0069】
基準測定深度203より深い測定深度に対して測定を行いたい場合であっても、超音波信号の取得は、図3の場合と同じように、超音波信号取得周期311の時間内で完了させなければならない。
【0070】
送受信時間611は、基準測定深度より深い領域を測定する1回の超音波ビームの送信と超音波信号の受信にかかる時間を示しており、横幅がその送受信時間に相当する。つまり、被検体深部を測定するための送受信時間が、図3(b)に比べて長くかかることがわかる。
【0071】
そのため、超音波信号の取得周期311の時間内で超音波信号の取得を完了させるためには、走査を行うための超音波ビームの数を、本来の超音波ビームの数であるN個よりも少なく制限して、周期311に収める必要がある。超音波ビーム数の計算法は前述の方法と同様である。本例の場合、超音波ビームの数を、本来の超音波ビームの数であるN個より少ないM個に制限するものとする。
すなわち、測定深度をDとして式(3)を適用すると、副走査方向に沿った超音波ビームの数であるMは、M≦(L/u)/(2D/vb)を満たす最大の整数となる。
【0072】
続いて、基準測定深度を超える被検体深部を測定する場合の超音波信号の取得方法を、図7を用いて説明する。図5と同様に、図7(a)は保持された被検体101を探触子が接する保持板102B側から見た正面図、図7(b)はその側面図をそれぞれ示している。
【0073】
701A、701B、701C、701D、701Eは各y軸位置(探触子の副走査位置)における探触子の移動軌跡を、702A、702B、702C、702D、702Eは各y軸位置で取得される超音波画像の領域を示している。
【0074】
測定深度703は、基準測定深度203を超える被検体深部を測定するための深度を示しており、測定深度703を測定可能なようにビーム形状を制御された超音波ビーム704により測定を行う。
【0075】
本例においては、移動制御部109が、式(1)と式(2)の関係から超音波ビームの本数を決定し、超音波ビームの本数に、探触子104が有する音響素子の間隔を乗ずることで電子走査幅を算出する。
電子走査幅705は、領域702A〜702Eから超音波画像を取得するための電子走査幅を示している。本例では超音波ビームの数が制限されるため、電子走査幅705は、図5における電子走査幅505に対して狭くなる。
【0076】
つまり、探触子のy軸方向へのシフト量が小さくなるため、基準測定深度203を超える測定深度703の超音波測定を行い、超音波データ711を取得するためには、x軸方向の探触子の走査回数を多くしなければならない。本例では、決定された電子走査幅が、走査領域が持つy軸方向の長さの1/5であるため、x軸方向の探触子の走査(主走査)を5回繰り返すことになる。
【0077】
以上、説明したように、基準測定深度を超える測定深度を得たい場合、1回の電子走査における超音波ビームの数を減らすことによって処理時間を確保するのが第一の実施形態である。
【0078】
(処理フローチャート)
第一の実施形態に係る超音波測定装置の動作を、測定装置100の処理フローチャートである図8を参照しながら詳細に説明する。なお、検査者による被検体の保持などの測定準備作業は、本フローチャートの開始前に完了しているものとする。
【0079】
まず、検査者が操作部124により超音波データの取得を指示すると、指示を受けた制御部111が、移動制御部109に対して超音波データの取得開始を指示する。
【0080】
画像処理装置120からの超音波測定の開始指示と共に、目的とする3次元超音波画像に必要な超音波信号の取得ピッチなど、超音波画像の取得に必要なパラメータが、画像処理装置120から制御部111へ送信される。なお、当該パラメータは検査者により指定されてもよいし、目的とする3次元超音波画像のボクセルピッチから決定されてもよい。
【0081】
移動制御部109は、取得開始指示を受信すると、装置に固有な基準測定深度を取得し(S801)、続いて保持制御部103から出力される、被検体の保持距離を含む情報を受信して測定深度の情報を取得する(S802)。
【0082】
続いて、移動制御部109は、測定深度が基準測定深度を超えているかどうかを判定する(S803)。超えている場合は、ステップ804へ処理を移行し、電子調査幅の調整および探触子走査の移動量調整を行う。超えていない場合は、ステップ807へ処理を移行して、電子走査幅の調整および探触子走査の移動量調整を行わずに、既定の本数の超音波ビームを使用して超音波データの取得を行う。
【0083】
測定深度が基準測定深度を超えている場合、移動制御部109は、ステップS802で算出した測定深度を測定するのに必要な信号取得時間を、式(1)によって算出する(S804)。なお、信号取得時間は測定深度と被検体101や保持板102B内の音速を考慮して算出されるが、保持圧力によって被検体101内での音速を補正することで、超音波送受信時間を調整してもよい。
【0084】
同時に、移動制御部109は、生成すべき超音波画像の解像度と、音響波探触子の移動速度に基づいて、制約時間、すなわち超音波信号の取得周期311を取得する。制約時間は、式(2)によって、すなわち装置仕様として決められている探触子104の主走査方向の移動速度303と、取得する超音波信号の取得ピッチ302によって定められる。
【0085】
続いて、移動制御部109は、取得した制約時間と、算出した信号取得時間を比較し、式(3)を満たすように超音波ビームの数を決定し、電子走査幅を決定する(S805)。ステップS802〜S805の処理が、本発明を適用することができる被検体情報取得装置における送信音響波調整手段に相当する。
【0086】
続いて、移動制御部109は、ステップ805で調整した電子走査幅から、図7のように探触子104の探触子走査における副走査方向の繰り返し数を調整する(S806)。もし、超音波データの取得領域と、探触子104の副走査方向のシフト量とが一致しない場合、最後の副走査位置における電子走査幅を調整してもよい。また、最後の副走査位置における電子走査幅の調整量を、全ての副走査位置に均等に配分することで全ての電子走査幅が同じなるように調整してもよい。ステップS806が完了すると、移動制御部109は探触子104による2次元走査を開始する。
【0087】
ステップS807では、移動制御部109が移動機構108を介して、探触子104を主走査方向に移動制御し、次の信号取得開始位置に移動させる。
【0088】
次の信号取得開始位置に到達すると、移動制御部109が走査制御部110に対して、ステップS805で決定した電子走査幅での電子走査を指示する(S808)。
【0089】
電子走査が終了すると、信号処理部107が、受信した超音波信号に対して受信フォーカス処理を行い記録する(S809)。この信号処理を行うことにより、一つの断層画像を生成するのに必要な情報が収集されたことになる。
【0090】
信号処理が完了すると、続いて移動制御部109が、探触子104の主走査方向の走査が完了したかを判定する(S810)。走査の完了は、ユーザに指定された超音波データの取得領域に対して主走査方向の移動が完了したかどうかで判定する。移動が完了した場合には、ステップ811へ処理を移行する。そうでない場合には、ステップ807へ処理を移行し、次の信号取得開始位置で超音波信号の取得を繰り返す。
【0091】
主走査方向の走査が完了すると、移動制御部109が、指定された超音波データ取得領域に対して全ての走査が完了したかどうかを判定する(S811)。全ての走査が完了した場合には、ステップ813へ処理を移行する。完了していない場合には、ステップS812へ処理を移行する。
【0092】
全ての走査が完了していない場合、移動制御部109が移動機構108を制御して、探触子104を副走査方向に一定の距離だけ移動させ、超音波データの取得動作を継続する(S812)。このように、ステップS807〜S812の処理を繰り返すことによって走査を行う。
【0093】
全ての走査が完了すると、制御部111が、取得した超音波データを画像処理装置120に対して出力する(S813)。
【0094】
以上の処理を行うことにより、基準測定深度を超えた超音波データの取得を実施できる。なお、ステップS806〜S813が、本発明を適用することができる被検体情報取得装置における走査手段に相当する。
【0095】
本実施形態によれば、超音波データを取得するために超音波探触子を2次元走査しながら超音波の測定を行う超音波測定装置において、基準測定深度を超える被検体深部の超音波データを取得することが可能となる。すなわち、信号処理を行う時間が不足するという問題を解決することができる。
【0096】
(第二の実施形態)
本発明の第二の実施形態を、図に従って説明する。
第二の実施形態の特徴は、基準測定深度よりも浅い領域から超音波データを取得する場合に、超音波信号の取得が早く完了することで生じる冗長な時間を活用する点にある。
【0097】
なお、第二の実施形態における超音波測定装置の構成(図1)と、超音波探触子の走査方法(図2)、電子走査方法の詳細(図4)は、第一の実施形態と同様であり、説明を省略する。
【0098】
図9は、基準測定深度よりも浅い領域の被検体を測定する場合の超音波信号の取得ピッチと、電子走査に係る信号取得時間の関係を説明する概念図である。
【0099】
測定深度が、基準測定深度203より浅い場合であっても、探触子104の移動速度303、および、x軸方向の超音波信号取得ピッチ302は同一である。そのため、信号取得開始位置312Bから超音波信号の取得を開始した場合、第一の実施形態と同様に、超音波信号の取得周期である311までに電子走査を完了できればよい。
【0100】
送受信時間911は、基準測定深度よりも浅い領域を測定する1回の超音波ビームの送信と超音波信号の受信にかかる時間を示しており、横幅がその送受信時間に相当する。浅い領域を測定する場合、超音波信号の送受信時間が短くなるため、同じ数の超音波ビームを送受信した場合、所要時間は送受信時間313を下回る。
つまり、超音波信号の取得周期311内で、基準測定深度を測定する場合よりも多くの超音波ビームを送受信することができる。超音波ビーム数の計算法は前述の方法と同様である。第二の実施形態の場合、超音波ビームの数を、本来の超音波ビームの数であるN個より多いL個にすることができる。
【0101】
続いて、第二の実施形態における超音波データの取得方法を、図10を用いて説明する
。図10(a)は、保持された被検体101を探触子が接する保持板102Bの側から見た正面図、図10(b)はその側面図をそれぞれ示している。
【0102】
1001A、1001B、1001Cは探触子の副走査位置(y軸位置)における、探触子の移動軌跡を、1002A、1002B、1002Cは各副走査位置で取得される超音波画像の領域を示している。
【0103】
1003は、基準測定深度203より浅い深度を示しており、好適なビーム形状に制御された超音波ビーム1004により測定を行う。
【0104】
本例においても、移動制御部109が、式(1)と式(2)の関係から超音波ビームの本数を決定し、超音波ビームの本数に、探触子104が有する音響素子の間隔を乗ずることで電子走査幅を算出する。電子走査幅1005は、領域702A〜702Eを取得するための超音波ビームの電子走査幅である。本例では、基準測定深度を測定する場合と比較して超音波ビームの数を増やすことができるため、図5における電子走査幅505に対して電子走査幅は広くなる。
【0105】
したがって、基準測定深度203よりも浅い測定深度1003の超音波測定を行う場合、y軸方向の電子走査幅が広くなるため、x軸方向の走査はより少ない回数で済む。本例では、決定された電子走査幅が、走査領域が持つy軸方向の長さの1/3であるため、x軸方向の探触子の走査(主走査)を3回繰り返すことになる。
【0106】
第二の実施形態に係る超音波測定装置の動作を、図8のフローチャートに当てはめて説明する。ステップS802までの処理は、第一の実施形態と同様である。
第二の実施形態においては、ステップS803での比較判定を行わずにステップ804へ処理を移行し、電子走査幅の決定、および探触子走査における副走査方向の繰り返し数の調整を行う。
ステップS804以降の処理は、第一の実施形態と同様である。
【0107】
以上、図9と図10で説明したように、測定深度が浅い場合、電子走査幅を標準より広げ、探触子の走査軌道を調整することにより、超音波信号の取得周期311の時間を最大限に活用することができ、全体として超音波データの取得時間を短縮できる。
【0108】
なお、第一の実施形態においては、基準測定深度を測定する際に電子走査幅が最大となるように構成したが、本実施形態においては、音響素子を増やし、基準測定深度を測定する際よりも電子走査幅を大きくできるようにしておくことが望ましい。
【0109】
本実施形態によれば、超音波探触子を2次元走査しながら超音波の測定を行う超音波測定装置において、測定深度が想定よりも浅い場合、電子走査幅を広げることができる。その結果として、走査一回あたりの読み取り幅を広くすることが可能となり、超音波データの全体の取得時間を短縮することができる。
【0110】
なお、本実施形態では、測定深度が想定より浅い場合の作用および効果のみを説明したが、測定深度が想定より深い場合であってもよい。いずれの場合も、基準測定深度を用いることなく、常に式(3)を用いて超音波ビームの数を決定することができる。
【0111】
上記の実施形態はあくまでも一例であって、本発明はその要旨を逸脱しない範囲内で適宜変更して実施しうるものである。
たとえば、例示した実施形態では、電子走査幅を変化させることで超音波ビームの数を調整したが、例えば超音波ビームを間引く、すなわち、超音波画像の解像度を落とす等の
方法によって、電子走査幅を維持してもよい。
【0112】
また、本発明を適用することができる被検体情報取得装置は、前述した実施形態の機能を実現するために、中央演算処理装置(CPU)および主記憶装置(RAM)、補助記憶装置(記憶媒体)を有していてもよい。このように構成した場合、先に説明したフローチャートに対応するプログラムコードが補助記憶装置に格納され、当該プログラムコードをCPUが読み出して実行することにより、前述した実施形態の機能が実現される。この場合、コンピュータ上で稼働しているオペレーティングシステム(OS)などが処理の一部または全部を行い、前述した実施形態の機能を実現してもよい。
【符号の説明】
【0113】
101・・・被検体、103・・・保持制御部、104・・・超音波探触子、107・・・信号処理部、108・・・移動機構、109・・・移動制御部、110・・・走査制御部、111・・・制御部
【特許請求の範囲】
【請求項1】
被検体情報を取得する被検体情報取得装置であって、
複数の音響素子が、少なくとも第一の方向に沿って配列され、前記複数の音響素子により、音響波ビームの送信および被検体内部で反射した音響波の受信を、前記第一の方向に沿って順次行う音響波探触子と、
前記第一の方向に交差する第二の方向を主走査方向とし、前記主走査方向に前記音響波探触子を所定の速度で移動させる走査手段と、
前記音響波ビームの送信方向における被検体情報を取得するための測定深度の情報を取得し、前記測定深度と前記被検体情報の主走査方向の分解能と前記音響波探触子の移動速度に応じて、前記音響波ビームの前記第一の方向に沿った本数を決定する送信音響波調整手段と、
を有することを特徴とする、被検体情報取得装置。
【請求項2】
前記送信音響波調整手段は、生成すべき被検体情報の主走査方向の分解能と前記音響波探触子の移動速度とに基づいて決定される第一の時間内に、音響波ビームを送信してから、前記測定深度にて反射した音響波を受信するまでの時間の、複数の前記音響波ビームについての合計である第二の時間が収まるように、前記音響波ビームの前記第一の方向に沿った本数を決定する
ことを特徴とする、請求項1に記載の被検体情報取得装置。
【請求項3】
前記走査手段は、前記第一の方向を副走査方向とし、前記音響波探触子を前記副走査方向にさらに移動させることができ、前記主走査方向と前記副走査方向に前記音響波探触子を繰り返して移動させながら被検体に対する測定を行う
ことを特徴とする、請求項1または2に記載の被検体情報取得装置。
【請求項4】
基準となる音響波ビームの本数である基準音響波ビーム数を測定に用いた場合に、前記第二の時間が前記第一の時間を上回るときは、
前記送信音響波調整手段は、前記音響波ビームの前記第一の方向に沿った音響波ビームの本数を前記基準音響波ビーム数より少なくし、
前記走査手段は、前記音響波探触子の前記副走査方向へのシフト量を小さくする
ことを特徴とする、請求項3に記載の被検体情報取得装置。
【請求項5】
基準となる音響波ビームの本数である基準音響波ビーム数を測定に用いた場合に、前記第二の時間が前記第一の時間を下回るときは、
前記送信音響波調整手段は、前記音響波ビームの前記第一の方向に沿った音響波ビームの本数を前記基準音響波ビーム数より多くし、
前記走査手段は、前記音響波探触子の前記副走査方向へのシフト量を大きくする
ことを特徴とする、請求項3または4に記載の被検体情報取得装置。
【請求項6】
複数の音響素子が、少なくとも第一の方向に沿って配列され、前記複数の音響素子により、音響波ビームの送信および被検体内部で反射した音響波の受信を、前記第一の方向に沿って順次行う音響波探触子
を有し、
前記第一の方向に交差する第二の方向を主走査方向とし、前記主走査方向に前記音響波探触子を所定の速度で移動させて被検体情報を取得する被検体情報取得装置の制御方法であって、
前記音響波ビームの送信方向における被検体情報を取得するための測定深度の情報を取得するステップと、
前記測定深度と前記被検体情報の主走査方向の分解能と前記音響波探触子の移動速度に
応じて、前記音響波ビームの前記第一の方向に沿った本数を決定するステップと、
を含む
ことを特徴とする、被検体情報取得装置の制御方法。
【請求項1】
被検体情報を取得する被検体情報取得装置であって、
複数の音響素子が、少なくとも第一の方向に沿って配列され、前記複数の音響素子により、音響波ビームの送信および被検体内部で反射した音響波の受信を、前記第一の方向に沿って順次行う音響波探触子と、
前記第一の方向に交差する第二の方向を主走査方向とし、前記主走査方向に前記音響波探触子を所定の速度で移動させる走査手段と、
前記音響波ビームの送信方向における被検体情報を取得するための測定深度の情報を取得し、前記測定深度と前記被検体情報の主走査方向の分解能と前記音響波探触子の移動速度に応じて、前記音響波ビームの前記第一の方向に沿った本数を決定する送信音響波調整手段と、
を有することを特徴とする、被検体情報取得装置。
【請求項2】
前記送信音響波調整手段は、生成すべき被検体情報の主走査方向の分解能と前記音響波探触子の移動速度とに基づいて決定される第一の時間内に、音響波ビームを送信してから、前記測定深度にて反射した音響波を受信するまでの時間の、複数の前記音響波ビームについての合計である第二の時間が収まるように、前記音響波ビームの前記第一の方向に沿った本数を決定する
ことを特徴とする、請求項1に記載の被検体情報取得装置。
【請求項3】
前記走査手段は、前記第一の方向を副走査方向とし、前記音響波探触子を前記副走査方向にさらに移動させることができ、前記主走査方向と前記副走査方向に前記音響波探触子を繰り返して移動させながら被検体に対する測定を行う
ことを特徴とする、請求項1または2に記載の被検体情報取得装置。
【請求項4】
基準となる音響波ビームの本数である基準音響波ビーム数を測定に用いた場合に、前記第二の時間が前記第一の時間を上回るときは、
前記送信音響波調整手段は、前記音響波ビームの前記第一の方向に沿った音響波ビームの本数を前記基準音響波ビーム数より少なくし、
前記走査手段は、前記音響波探触子の前記副走査方向へのシフト量を小さくする
ことを特徴とする、請求項3に記載の被検体情報取得装置。
【請求項5】
基準となる音響波ビームの本数である基準音響波ビーム数を測定に用いた場合に、前記第二の時間が前記第一の時間を下回るときは、
前記送信音響波調整手段は、前記音響波ビームの前記第一の方向に沿った音響波ビームの本数を前記基準音響波ビーム数より多くし、
前記走査手段は、前記音響波探触子の前記副走査方向へのシフト量を大きくする
ことを特徴とする、請求項3または4に記載の被検体情報取得装置。
【請求項6】
複数の音響素子が、少なくとも第一の方向に沿って配列され、前記複数の音響素子により、音響波ビームの送信および被検体内部で反射した音響波の受信を、前記第一の方向に沿って順次行う音響波探触子
を有し、
前記第一の方向に交差する第二の方向を主走査方向とし、前記主走査方向に前記音響波探触子を所定の速度で移動させて被検体情報を取得する被検体情報取得装置の制御方法であって、
前記音響波ビームの送信方向における被検体情報を取得するための測定深度の情報を取得するステップと、
前記測定深度と前記被検体情報の主走査方向の分解能と前記音響波探触子の移動速度に
応じて、前記音響波ビームの前記第一の方向に沿った本数を決定するステップと、
を含む
ことを特徴とする、被検体情報取得装置の制御方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2013−102805(P2013−102805A)
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願番号】特願2011−246414(P2011−246414)
【出願日】平成23年11月10日(2011.11.10)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願日】平成23年11月10日(2011.11.10)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
[ Back to top ]