
被検査体の欠陥検査方法及びその装置
【課題】温度場におけるインテリジェントハイブリッド法の適用を可能とした検査方法及びその装置を提供する。
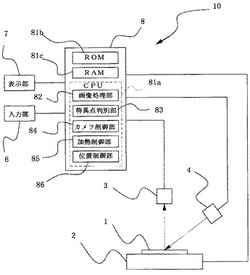
【解決手段】被検査体1の欠陥検査方法を適用可能な装置10は、被検査体1の表面を加熱するヒータ4と、加熱された被検査体1の表面から放射された赤外線で形成される赤外線像を撮像する赤外線カメラ3と、コンピュータ8とを備え、このコンピュータ8は、さらに非定常温度場における誤差最小化変分原理を用いたインテリジェントハイブリッド法を適用することにより前記赤外線像を修正する画像処理部82と、修正された赤外線像に基づいて被検査体1の亀裂部分を判別する特異点判別部83とを備えている。
【解決手段】被検査体1の欠陥検査方法を適用可能な装置10は、被検査体1の表面を加熱するヒータ4と、加熱された被検査体1の表面から放射された赤外線で形成される赤外線像を撮像する赤外線カメラ3と、コンピュータ8とを備え、このコンピュータ8は、さらに非定常温度場における誤差最小化変分原理を用いたインテリジェントハイブリッド法を適用することにより前記赤外線像を修正する画像処理部82と、修正された赤外線像に基づいて被検査体1の亀裂部分を判別する特異点判別部83とを備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えば赤外線サーモグラフィを用いて被検査体の欠陥を検査する方法及びその装置に関するものである。
【背景技術】
【0002】
赤外線サーモグラフィなどによる広域的な温度場の計測は、工業機器における安全性評価などの目的で広く行われている。
【0003】
例えば特許文献1では、被検査体の表面または表面近傍に在る欠陥を検査する検査装置であって、被検査体の表面の所定領域を実質的に一様に加熱する加熱手段と、前記領域から放射された赤外線で形成される赤外線像を撮像する撮像手段と、前記赤外線像を画像解析してその赤外線像における特異部分を判別する画像処理手段とを有するものが開示されている。
【0004】
また特許文献2では、被験体に温度場を与えて赤外線サーモグラフィによる材料の欠陥検出を行うに際し、被験体を、温度制御装置により制御される電子冷熱プレートの表面に密接して加熱・冷却し、真空チャンバにより赤外線カメラと被験体との間を真空状態に保持して、その赤外線カメラで得られる熱画像から材料の欠陥検出を行う技術が開示されている。
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、いずれの技術についても、その計測値は、高次な量である熱流束分布、さらには熱応力分布などを得るのに十分な精度があるとはいえない。一般に、誤差やノイズ、計測不能な領域の存在は、高次な量を得る際に少なからぬ悪影響を及ぼすからである。
【0006】
このため、従来の技術では、いずれも被検査体(或いは被験体)の微小な亀裂を検出することができないおそれがあり、その逆に誤差等を亀裂として誤って検出するおそれさえもあった。
【0007】
本発明は、このような状況に鑑みてなされたものであって、測定値に含まれる誤差等の悪影響をまったくなくして、被検査体の亀裂部分を正確に検出することのできる被検査体の欠陥検査方法及びその装置を提供することを目的としている。
【課題を解決するための手段】
【0008】
本発明(方法)は、被検査体の表面を加熱する加熱工程と、前記加熱された被検査体の表面から放射された赤外線で形成される赤外線像を赤外線カメラで撮像する撮像工程とを備えた被検査体の欠陥検査方法であって、温度場における誤差最小化変分原理を用いたインテリジェントハイブリッド法を適用することにより前記赤外線像を修正する修正工程と、前記修正された赤外線像に基づいて前記被検査体の亀裂部分を判別する判別工程とを備えたことを特徴とするものである。
【0009】
本発明(装置)は、被検査体の表面を加熱する加熱手段と、前記加熱された被検査体の表面から放射された赤外線で形成される赤外線像を撮像する赤外線カメラとを備えた被検査体の欠陥検査装置であって、温度場における誤差最小化変分原理を用いたインテリジェントハイブリッド法を適用することにより前記赤外線像を修正する修正手段と、前記修正された赤外線像に基づいて前記被検査体の亀裂部分を判別する判別手段とを備えたことを特徴とするものである。
【0010】
本発明によれば、温度場における誤差最小化変分原理を用いたインテリジェントハイブリッド法を適用することにより前記赤外線像が修正されるので、その修正された赤外線像には、高次な量である熱流束分布、さらには熱応力分布などを得るのに十分な精度がある。
【0011】
一般には、誤差やノイズ、計測不能な領域の存在は、高次な量を得る際に少なからぬ悪影響を及ぼすのであるが、本発明では、前記修正された赤外線像に基づいて前記被検査体の亀裂部分が判別されるので、これらの影響をまったくなくして、被検査体の亀裂部分を正確に検出することができる。したがって、本発明では、従来技術のような被検査体の亀裂部分の検出もれや、誤検出のおそれが非常に少なくなる。
【0012】
ところで、物体が加熱されたり、冷却されたりする過程、または加熱と冷却とが周期的に繰り返される場合などのように温度が時間によって変化する温度場を非定常温度場という。そこで、請求項2記載の発明のように、前記インテリジェントハイブリッド法は、非定常温度場における誤差最小化変分原理を用いたものであることが好ましい。
【0013】
請求項2記載の発明によれば、前記インテリジェントハイブリッド法は、非定常温度場における誤差最小化変分原理を用いたものであるので、非定常温度場が適用可能な被検査体の亀裂部分を正確に検出することができる。
【0014】
一方、熱がいつも同じ状態で移動する場合のように温度が時間によって変化しないときの温度場を定常温度場という。そこで、請求項3記載の発明のように、前記インテリジェントハイブリッド法は、定常温度場における誤差最小化変分原理を用いたものであることが好ましい。
【0015】
請求項3記載の発明によれば、前記インテリジェントハイブリッド法は、定常温度場における誤差最小化変分原理を用いたものであるので、定常温度場が適用可能な被検査体の亀裂部分を正確に検出することができる。
【0016】
請求項4記載の発明のように、前記判別工程は、前記亀裂部分を画面上に表示する表示工程をさらに備えることが好ましい。
【0017】
請求項4記載の発明によれば、前記判別工程は、前記亀裂部分を画面上に表示する表示工程をさらに備えたので、被検査体の亀裂部分を視覚でもって容易に把握することができる。
【0018】
請求項5記載の発明のように、前記表示工程は、前記亀裂部分の周りの熱流束ベクトルの大きさの変化を、前記画面上に複数の色彩の変化で表示するものであることが好ましい。
【0019】
請求項5記載の発明によれば、前記表示工程は、前記亀裂部分の周りの熱流束ベクトルの大きさの変化を、前記画面上に複数の色彩の変化で表示するものであるので、被検査体の亀裂部分を視覚でもってさらに容易に把握することができる。
【発明の効果】
【0020】
本発明によれば、温度場における誤差最小化変分原理を用いたインテリジェントハイブリッド法を適用することにより前記赤外線像が修正されるので、その修正された赤外線像には、高次な量である熱流束分布、さらには熱応力分布などを得るのに十分な精度がある。
【0021】
一般には、誤差やノイズ、計測不能な領域の存在は、高次な量を得る際に少なからぬ悪影響を及ぼすのであるが、本発明では、前記修正された赤外線像に基づいて前記被検査体の亀裂部分が判別されるので、これらの影響をまったくなくして、被検査体の亀裂部分を正確に検出することができる。したがって、本発明では、従来技術のような被検査体の亀裂部分の検出もれや、誤検出のおそれが非常に少なくなる。
【図面の簡単な説明】
【0022】
【図1】本発明の一実施形態に係る欠陥検査装置の全体構成を示すブロック図である。
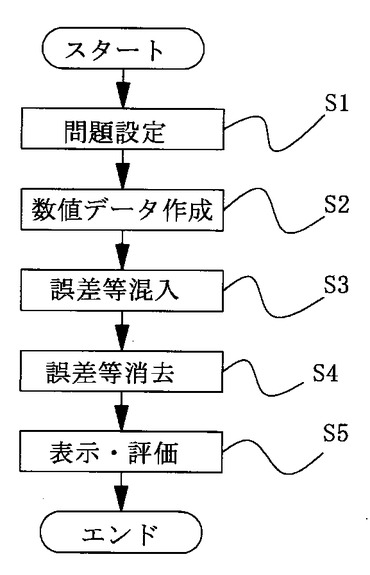
【図2】数値シミュレーションによる検証の手順を示すフローチャートである。
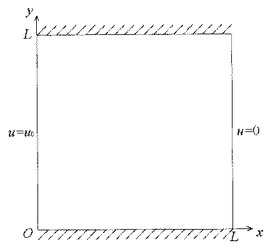
【図3】非定常問題の解析用の2次元正方形領域を示す図である。
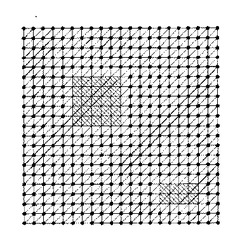
【図4】正方形領域をメッシュ分割した様子を示す図である。
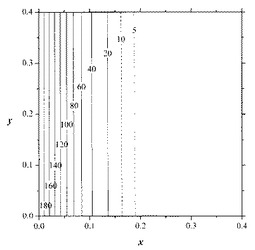
【図5】数値シミュレーション結果を示す図のうちの、時刻t=100(sec)における実験計測温度場の数値データによる等高線図である。
【図6】数値シミュレーション結果を示す図のうちの、図5の実験計測温度場に基づく熱流束ベクトル図である。
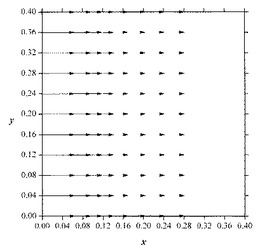
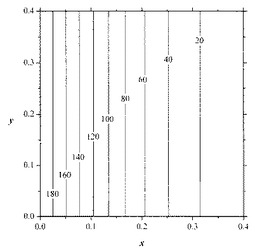
【図7】数値シミュレーション結果を示す図のうちの、各時間ステップの実験計測温度場の数値データを取り込んで、インテリジェントハイブリッド法により10ステップ進行した同時刻の実験計測温度場の等高線図である。
【図8】数値シミュレーション結果を示す図のうちの、図7の実験計測温度場に基づく熱流束ベクトル図である。
【図9】数値シミュレーション結果を示す図のうちの、時刻t=600(sec)における実験計測温度場の数値データによる等高線図である。
【図10】数値シミュレーション結果を示す図のうちの、図9の実験計測温度場に基づく熱流束ベクトル図である。
【図11】数値シミュレーション結果を示す図のうちの、インテリジェントハイブリッド法により60ステップ進行した同時刻の実験計測温度場の等高線図である。
【図12】数値シミュレーション結果を示す図のうちの、図11の実験計測温度場に基づく熱流束ベクトル図である。
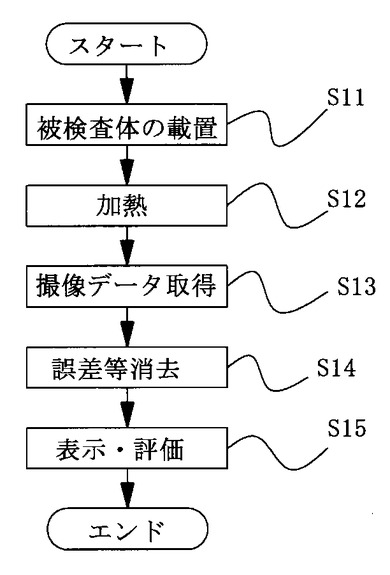
【図13】被検査体の亀裂の検査の手順を示すフローチャートである。
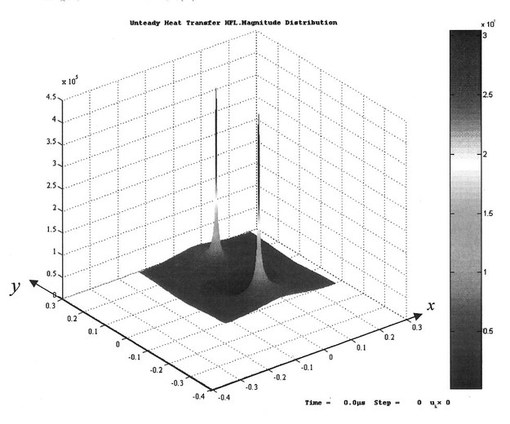
【図14】亀裂がある場合の表示部の表示例を示す図である。
【発明を実施するための形態】
【0023】
図1は本発明の一実施形態に係る欠陥検査装置10の全体構成を示すブロック図である。図1に示すように、本実施形態に係る欠陥検査装置10は、例えばステンレス鋼の薄板である被検査体1をx,y方向に移動可能に載置する載置台2と、載置台2上に載置した被検査体1の表面を加熱するヒータ(加熱手段に相当する。)4と、前記加熱された被検査体1の表面から放射された赤外線で形成される赤外線像を撮像する赤外線カメラ3と、コンピュータ8とを備えている。これらの載置台2、ヒータ4、赤外線カメラ3及びコンピュータ8のハードウエア自体は、いずれも市販のものを使用することができる。
【0024】
例えばコンピュータ8は、各種演算等を実行するCPU(Central processing unit)81aと、各種プログラム等を予め記憶しておくROM(Read−only memory)81bと、各種データ等を一時的に記憶するRAM(Randam−access memory)81cとを備えたパーソナルコンピュータであり、これにキーボードやマウスなどの入力部6と、CRTや液晶などの表示部7とがそれぞれ電気的に接続されている。
【0025】
そして、前記ROM81bに記憶しておいた各種プログラム等を前記CPU81aに読み込んで実行することで、前記赤外線像を画像分析する画像処理部82と、前記赤外線像における特異点を判別する特異点判別部83と、赤外線カメラ3の動作を制御するカメラ制御部84と、ヒータ4の動作を制御する加熱制御部85と、載置台2の動作を制御する位置制御部86とがそれぞれ構築されるようになっている。
【0026】
画像処理部82は、赤外線カメラ3で取り込まれた被検査体1の赤外線像と、x,y座標の位置情報とを用いて画像処理を行うものであって、ここでは温度場における誤差最小化変分原理を用いたインテリジェントハイブリッド法を利用して誤差等の修正をする機能をも有するものである(修正手段に相当する)。
【0027】
特異点判別部83は、画像処理部82での修正画像における特異点を抽出し、この特異点を亀裂部分として判別するものである(判別手段に相当する)。
【0028】
カメラ制御部84は、赤外線カメラ3による赤外線像の取り込みタイミングなどを制御し、加熱制御部85は、ヒータ4による被検査体1の加熱温度などを制御し、位置制御部86は、載置台2上に載置された被検査体1のx、y座標位置を制御するものである。なお、各制御部84〜86は、コンピュータ8の外付けのコントローラとして別途設けることとしてもよい。
【0029】
以下、温度場における誤差最小化変分原理を用いたインテリジェントハイブリッド法のうちの非定常温度場における誤差最小化変分原理を用いたインテリジェントハイブリッド法について詳述する。なお、定常温度場における誤差最小化変分原理を用いたインテリジェントハイブリッド法については、本発明者らによる「定常温度場のインテリジェントハイブリッド計測法に関する基礎研究」、日本実験力学会誌、Vol.6、No.4、2006、pp.457−463において詳述しているので、その詳細な説明は割愛する(ただし、同誌においては、被検査体1における亀裂部分の検査への適用可能性については開示も示唆もしていない)。
【0030】
いま、2次元の非定常温度場u(x,y,t)を考える。なお、x,yはそれぞれx,y方向の位置情報であり、tは時間情報である。支配方程式である非定常熱伝導方程式は、熱伝導係数κ が等方かつ一定な場合には次式で記述される。
【0031】
【数1】

ここで,ρ は密度、cは比熱、Qは単位体積・単位時間あたりの発熱量、V は対象領域を表す。初期条件は、既知関数f(x,y)により与えられるものとする。
【0032】
【数2】
また境界条件は、
【数3】
【数4】
ここで、u0は基本境界S1上で与えられた既知温度、qは単位面積あたりの熱流束で、q0は自然境界S2上で与えられた単位面積あたりの既知熱流束、nは自然境界上の外向きが正の法線座標である。これに対応する汎関数I(u) は次式で表される。
【0033】
【数5】
I(u+δu)−I(u)から(δu)2の項を無視して得られる、I(u)の第1変分δI(u)は、各時刻tについて温度場の解uに対してδI(u)=0を満たす。
【0034】
【数6】
この式(数6)にGreenの定理を適用して、S1上で温度は既知ゆえにδu=0に留意すると、解uに対してδI(u)=0が明確な形の式となる。
【0035】
【数7】
すなわち、解uが方程式(数1)や境界条件(数4)を満足することから、任意のδuに対しても、被積分関数ひいては積分値は0となり、δI(u)=0を満たすのである。
【0036】
いま、実験計測による温度場(以下、「実験計測温度場」という。)をuexpとすると、一般に実験計測温度場uexpには実験計測誤差や何らかのノイズが含まれており、そのままでは支配方程式(数1)を満足しない。そこで、修正のための温度場(以下、「修正温度場」という。)umodを加えて正しい温度場uを構成する。すなわち、
【数8】
ただし、計測不能な領域では実験計測温度場uexp=0として、修正温度場umodの値のみが寄与する。また、実験計測温度場uexpは既知だから、δu=δumodである。
【0037】
式(数8)を式(数6)に代入すると、修正温度場umodに対しての、非定常温度場における実験計測誤差を最小化する次の変分原理の式が得られる。
【0038】
【数9】
この式(数9)はGreenの定理を適用して次の形にも書ける。なお、qmodは修正熱流束である。
【0039】
【数10】
これにより、もしも実験計測温度場uexpが正確ならば、修正温度場umodと修正熱流束qmodが0になることがわかる。すなわち、実験計測温度場uexpが支配方程式(数1)と境界条件(数4)を満たすならば右辺は0となり、実験計測温度場uexpがさらに初期条件(数2)を満たすならば修正温度場umodの初期値は0となる。任意のδumodに対して左辺の積分が0となるために、修正温度場umodは発熱項の無い非定常熱伝導方程式に従って0のままであり、修正熱流束qmodも0でなければならないのである。
【0040】
他方、実験計測温度場uexpが正確でない場合には、一般に実験計測温度場uexpは支配方程式(数1)と境界条件(数4)を満たさないから右辺は常には0とならず、修正温度場umodは一般に0でない。この場合、式(数9)または式(数10)を満たす修正温度場umodを求めれば、式(数8)から正しい解uを得ることができる。このとき、式(数9)および式(数10)の右辺は、実験計測温度場uexpの誤差を自己修復する自己修復発熱量と解釈できる。
【0041】
ついで、非定常温度場での実験計測誤差を最小化する変分原理の式(数9)を基にインテリジェントハイブリッド法を定式化する。実験と数値的手法を組み合わせた実験・数値ハイブリッド法で、個数も位置も大きさもわからない誤差を自動的に検出して自動的に消去する“賢い”手法ということで「インテリジェント」と称しているのである。
【0042】
有限要素法における3角形要素の1つの要素nにおける形状関数をNj(x,y)、節点温度をuj(t)(i=1,2,3)として、この要素内の温度uは、
【数11】
と表すことができる。ここで、{u}nは要素nの節点温度の列ベクトル、上付き添え字Tはベクトルや行列の転置を表す。節点温度uiも式(数8)を満たすから、式(数11)は式中の文字uの右肩にすべてexp、またはすべてmodを付しても成り立つ。
【0043】
同様に、節点iでのδuの値をδuiとして、
【数12】
と表せる。δu=δumodゆえ、式(数12)の式中の文字uはすべて修正温度場umodと同一視できる。
【0044】
温度勾配の列ベクトル{g},{δg}を
【数13】
【数14】
と定義すると、式(数11)と式(数12)のxおよびyによる偏微分により、{g},{δg}は、形状関数の勾配から成る行列[B]を用いて,次のように表される。
【0045】
【数15】
【数16】
ここで、
【数17】
である。なお、式(数16)の両辺を転置すると、
【数18】
である。
【0046】
式(数11)を時間tで偏微分して、時間微分はドットを付して表すことにすると、
【数19】
要素nの領域をVnと表し、その自然境界をS2nと表して、領域Vの要素分割を考える。すると、誤差最小化変分原理の式(数9)は,ベクトル表記を用いるなどして,
【数20】
と表せる。ここで、Σは全要素にわたる和を表す。
【0047】
式(数11)〜式(数19)に適宜expまたはmodを付して式(数20)に代入し、次式を得る。
【0048】
【数21】
空間座標に依存しない部分は積分の外に出せて、
【数22】
{δumod}nは任意であるから、以下のように、インテリジェントハイブリッド法の方程式を得る。
【0049】
【数23】
【数24】
【数25】
【数26】
ここで、[K]は全体の熱伝導マトリックス、[C]は全体の熱容量マトリックス、[k]nは要素nの熱伝導マトリックス、[c]nは要素nの熱容量マトリックス、{umod}は修正温度場の全体節点温度場ベクトルである。また,右辺の{R}は実験計測温度場の誤差を自己修復する自己修復発熱量の全体節点ベクトルと解釈できる。
【0050】
式(数23)を解いて修正温度場{umod}を求め、実験計測温度場{uexp}に加えることにより、実験計測誤差が自動的に検出・消去された正しい温度場を得ることができる。
【0051】
以下、計算スキーム例を示す。時間ステップ幅をΔtとして、時間ステップm→m+1の素過程を考える。
【0052】
時間微分は差分近似により、
【数27】
と表せる。また、パラメータθ(0≦θ≦1)を用いて、
【数28】
とする。パラメータθ=0の場合が前進差分法、パラメータθ=1の場合が後退差分法、パラメータθ=1/2の場合がCrank−Nicholson法である。
【0053】
さて、インテリジェントハイブリッド法を用いるべき状況は種々想定されるが、ここでは簡単な場合を例にとる。
【0054】
まず、計算のための時間ステップ幅Δtが一定かつ実験計測温度場(値)uexpの測定時間間隔と等しいと仮定する。この場合、実験計測温度場uexpと修正温度場umodとで時間ステップ幅Δtと時間ステップmとは共通となり、式(数27),式(数28)は式中のuの右肩にすべてexp、またはすべてmodを付しても成り立つ。さらに、発熱量Q、自然境界S2上の熱流束q0が時間に依らないと仮定すると、式(数23),式(数26)より、
【数29】
を得る。
【0055】
上式は、m+1ステップの実験計測温度場{uexp}m+1に対する修正温度場{umod}m+1を求めるために、当該実験計測温度場{uexp}m+1と前ステップの正しい温度場{u}mを使用する形になっている。前ステップの正しい温度場{u}mは、前ステップでの計算で得た修正温度場{umod}mを同ステップの実験計測温度場{uexp}mに加えて得られるのであり、計算の開始時点において既知の初期条件を想定すれば、以降の計算は順次行えることになる。
【0056】
また、式(数29)を非定常2次元温度場における通常の有限要素法のスキームと比較すると、求められるものが修正温度場{umod}であることと、右辺下段の2つの項において実験計測温度場{uexp}を組み入れていることが相違する点である。したがって、実験計測温度場{uexp}が既に満たしている境界条件に配慮しつつ、非定常2次元温度場の有限要素法のプログラムを適切に改造すれば、非定常2次元温度場に対するインテリジェントハイブリッド法のためのプログラムを得ることができる。
【0057】
引き続いて、インテリジェントハイブリッド法による誤差の自動検出・自動消去の効果を検証するための数値シミュレーション例を示す。図2は検証の手順を示すフローチャート、図3は非定常問題の解析用の2次元正方形領域を示す図、図4は正方形領域をメッシュ分割した様子を示す図、図5〜図12は数値シミュレーション結果を示す図である。
【0058】
この数値シミュレーションは、図1に示す欠陥検査装置10の載置台2と、赤外線カメラ3と、ヒータ4と、コンピュータ8の各制御部84〜86の機能とを使用せず、全てのデータを入力部6から入力する場合に相当する。
【0059】
まず図2において、入力部6を用いてコンピュータ8のRAM81cに解析解のある非定常問題を設定する(ステップS1)。ついで、解析解に基づき、時間発展の各ステップに対応する数値データを作成する(ステップS2)。ついで、実験計測温度場{uexp}を想定して、前記ステップS2のデータに計測不能領域や誤差を人為的に混入した数値データを作成する(ステップS3)。ついで、
画像処理部82で、計算スキーム(数29)に従って、前記ステップS3のデータを実験計測温度場{uexp}として用いて計算を実行して、求めた修正温度場{umod}を、前記ステップS3のデータに加えて誤差が自動的に検出・消去された温度場を得る(ステップS4)。そして、特異点判別部83で、表示部7に結果をグラフ表示し、前記ステップS2と前記ステップS4との数値データの比較によって評価する(ステップS5)。
【0060】
図3に示すような辺の長さLの2次元正方形領域の上辺と下辺とが断熱(qy=0)、右辺が基準温度(u=0)に保たれるとする。時刻t=0に左辺の温度が0からu0に突然昇温(以後一定)した場合の、初期温度u(x,y,0)=0からの時間発展を考える。
【0061】
式(数1)の解析解は、変数分離とFourier展開により、
【数30】
と得られる。時刻t→∞では、総和Σの項は0となり、定常解u=u0[1−(x/L)]に至る。なお、数値データを作る際の総和Σの項数は1024とした。
【0062】
ついで、図4に示すように、正方形領域を縦横各20分割して、20×20×2=800個の3角形要素を配置した。総節点数は、21×21=441個である。
【0063】
今回の例では、計測不能領域の個数・位置・大きさが時間変化しない場合を想定した。計測不能領域として、大(L/4×L/4)・小(L/5×L/10)各1個の矩形領域を設定し、対応する6×6=36個および5×3=15個の計51節点上で計測値を0として扱った(図4中の斜線部分で示すL/4≦x≦L/2,L/2≦y≦3L/4の矩形領域と、7L/10≦x≦9L/10,L/10≦y≦L/5の矩形領域である)。
【0064】
誤差を混入する節点の数と相対誤差の最大値も時間に依らず固定したが、誤差を加える節点の選択(計測不能領域を除く。)と加える誤差の大きさは、時間ステップごとに乱数を用いて決定した。乱数で選択された節点iでは、ξ を一様乱数(0≦ξ≦1)として、
【数31】
により誤差を加えた。相対誤差の最大値は1/2÷4より12.5%となる。また、今回の例では誤差を混入する節点の数は50個に設定した。
【0065】
計算の際の寸法や物性値は、図3における辺の長さL=0.4(m)、基準温度u=0(℃)、左辺での昇温温度u0=200(℃)、熱伝導率κ=100(W/mK)、単位体積あたりの熱容量ρc=3×106(J/m3K)である。よって、定常状態に至る過程を特徴づける代表時間t0=L2ρc/κ=4800(sec)である。
【0066】
時間発展に関しては、時間ステップ幅Δt=10(sec)、パラメータθ=1(後退差分法)で、時刻t=0(sec)の初期温度場u(x,y,0)=0から60ステップ後の時刻t=600(sec)までおこなった。
【0067】
計算結果の中から、温度上昇がまだ図3における右半分には明瞭に現れていない時刻t=100(sec)と、温度上昇が図3におけるほぼ全域にわたった時刻t=600(sec)とを示す。
【0068】
時刻t=100(sec)における実験計測温度場{uexp}の数値データによる等高線図が図5である。等高線は、式(数31)に従い、乱数を使って混入した誤差によりがたつき、計測不能領域により大きく歪められている。そして、その温度場{uexp}に基づく熱流束ベクトル図が図6である。熱流束ベクトルの大きさや向きが乱されているのがわかる。
【0069】
これに対して、各時間ステップの実験計測温度場{uexp}の数値データを取り込んで、インテリジェントハイブリッド法により10ステップ進行した同時刻の温度場{uexp}の等高線図が図7である。そして、その温度場{uexp}に基づく熱流束ベクトル図が図8である。また、その左辺上の熱流束ベクトルの大きさはq=1.9877×105(W/m2)である。誤差や計測不能領域による乱れは自動的に検出・消去されており、解の1次元性が明確に現れている。
【0070】
解析解からの温度差の絶対値の最大は、x=0.06(m)、y=0.36(m)の節点で生じ、そこでは解析解温度92.4865(℃)から1.7789(℃)減少となっている。これは、率にして1.9234%の違いであり、現象を特徴づける代表温度u0=200(℃)に対する比率では0.88945%としかならない。なお、相対的な差(=解析解からの温度差÷解析解の温度)の絶対値の最大としては、9.4375倍の増加となるところがあるが、それは解析解温度が5.9721×10−4(℃)と実質的にまだ0(℃)と見なせる節点x=0.38(m)、y=0(m)上のことである。したがって、全体としては解析解と良い一致を示していると言え、誤差の自動検出・自動消去は良好におこなわれていることがわかる。
【0071】
同様に、時刻t=600(sec)における実験計測温度場{uexp}の数値データによる等高線図が図9である。そして、その温度場{uexp}に基づく熱流束ベクトル図が図10である。インテリジェントハイブリッド法によって60ステップ進行した同時刻の温度場{uexp}の等高線図が図11である。そして、その温度場{uexp}に基づく熱流束ベクトル図が図12であり、その左辺上の熱流束ベクトルの大きさはq=0.8014×105(W/m2)である。これらにおいても、インテリジェントハイブリッド法によって誤差や計測不能領域による乱れが除去されていることが明瞭に示されている。
【0072】
解析解からの温度差の絶対値の最大は、x=0.16(m)、y=0.34(m)の節点で生じ、そこでは解析解温度84.4676(℃)から0.3394(℃)減少となっている。これは、率にして0.4018%の違いであり、代表温度に対する比率では0.1697%となる。相対的な差の絶対値の最大は、x=0.38(m)、y=0.4(m)の節点で生じ、そこでは解析解温度4.3409(℃)から1.0589%減少となっている。したがって、全節点において解析解と良い一致を示しており、誤差の自動検出・自動消去が良好におこなわれていることがわかる。
【0073】
これら2つの時刻において代表されるように、各時刻における解析解との比較の結果は、誤差の自動検出・自動消去が良好におこなわれている。
【0074】
ここでは,非定常な2次元温度場に対する誤差最小化変分原理を導出した。そして,それに基づき、インテリジェントハイブリッド法を定式化した。さらに、その計算スキームの例を提示して検討し、非定常な2次元温度場の有限要素法による計算プログラムからの改造のポイントを指摘した。そして、簡単な解析解がある場合の数値シミュレーション例により、本手法の有効性を示した。なお、定常な2次元温度場に対する誤差最小化変分原理を用いたインテリジェントハイブリッド法についても、同様に、その手法についての有効性を示すことができる。
【0075】
引き続いて、本欠陥検査装置10の全ての機能を使用して、被検査体1の亀裂の検査を行うものとした。なお、図13は被検査体1の亀裂の検査を行うときの手順を示すフローチャート、図14は亀裂がある場合の表示部7の表示例を示す図である。厳密に言えば、図14に示す表示例は、上記シミュレーションと同様の数値データから導出したものであり、その数値は無次元化しているが、本欠陥検査装置10の全ての機能を使用して、被検査体1の亀裂の検査を行ったときの表示部7の画面上においても、同様の表示が得られることは容易に理解される。
【0076】
まず、図13に示すように、本欠陥検出装置10の載置台2上に被検査体1を載置する。すると、この被検査体11は、コンピュータ8の位置制御部86の制御の下に、載置台2上で、x、y方向に所定ピッチで移動される(ステップS11)。ついで、この移動する被検査体1の表面は、加熱制御部85の制御の下に、ヒータ4で加熱される(ステップS12:加熱工程に相当する)。ついで、被検査体1の表面から放射される赤外線が、カメラ制御部84の制御の下に、赤外線カメラ3で撮像され、その撮像データがコンピュータ8のRAM81cに一時的に記憶される(ステップS13:撮像工程に相当する)。
【0077】
ついで、計算スキーム(数29)に従って、前記ステップS13でRAM81cに一時的に記憶された撮像データを読み出し、画像処理部82で、実験計測温度場{uexp}mとして用いて計算を実行して、求めた修正温度場{umod}を、前記ステップS13の撮像データに加えて誤差が自動的に検出・消去された温度場を得る(ステップS14:修正工程に相当する)。そして、特異点判別部83で、表示部7に結果をグラフ表示し、亀裂部分が有るか否かを評価する(ステップS15:判別工程、表示工程に相当する)。
【0078】
表示部7は、図14に示すように、亀裂部分周りの熱流束ベクトルの大きさの変化を画面上に複数の色彩の変化で表示する。例えば、温度の比較的低い所を青色で、比較的高い所を赤色で示すものとするが、図14中ではグレースケールとなっているので、いずれも黒色となっており、その中間部が白色となっている。そして、x=0.1、y=−0.05の位置と、x=0.1、y=0.25の位置とで、それぞれ熱流束ベクトルの大きさはq=3.5×105程度となっており、その周囲では、熱流束ベクトルの大きさはq=0〜0.3×105程度となっていることから、明らかに2箇所のピークが(特異点)見られる。これらのピークは、被検査体1の亀裂の端部を示すものであるから、両ピーク間に被検査体1の亀裂が存在することがわかる。この亀裂は、従来の赤外線サーモグラフィなどでは見つからなかったほど微小なものである。このように、画面上で色付けをすることにより、被検査体1の亀裂部分を視覚的に容易に把握することができるようになる。
【0079】
以上説明したように、本実施形態によれば、非定常温度場における誤差最小化変分原理を用いたインテリジェントハイブリッド法を適用することにより、赤外線カメラ3で撮像された赤外線から形成される赤外線像が修正されるので、その修正された赤外線像には、高次な量である熱流束分布、さらには熱応力分布などを得るのに十分な精度がある。
【0080】
一般には、誤差やノイズ、計測不能な領域の存在は、高次な量を得る際に少なからぬ悪影響を及ぼすのであるが、本実施形態では、前記修正された赤外線像に基づいて被検査体1の亀裂部分が判別されるので、これらの影響をまったくなくして、被検査体1の亀裂部分を正確に検出することができる。したがって、本実施形態では、従来技術のような被検査体1の亀裂部分の検出もれや、誤検出のおそれが非常に少なくなる。
【0081】
なお、上記実施形態では、被検査体1の亀裂部分の検査において、非定常温度場における誤差最小化変分原理を用いたインテリジェントハイブリッド法を適用して、良好な結果を得ることができたが、定常温度場における誤差最小化変分原理を用いたインテリジェントハイブリッド法を適用しても、同様に、良好な結果を得ることができる。
【0082】
また、上記実施形態では、欠陥検査装置10の被検査体1に対して、いずれも2次元の非定常温度場を与えているが、3次元の非定常温度場を与えることとしてもよい。その場合には、亀裂の深さ等のより詳細な検査を行える可能性がある。定常温度場についても同様である。
【0083】
また、上記実施形態では、被検査体1をx、y方向に移動可能な載置台2に載置しているが、被検査体1が原子炉容器などのように大型のものであれば、その被検査体1を固定したままで、赤外線カメラ3を走査させることにより、同様の検査を行うことができる。
【0084】
また、上記実施形態では、加熱手段として、ヒータ4を使用しているが、レーザやランプなど他の加熱手段を使用してもよい。
【符号の説明】
【0085】
10 検査装置
1 被検査体
2 載置台
3 赤外線カメラ
4 ヒータ(加熱手段に相当する。)
6 入力部
7 表示部
8 コンピュータ
81a CPU
81b ROM
81c RAM
82 画像処理部(修正手段に相当する。)
83 特異点判別部(判別手段に相当する。)
84 カメラ制御部
85 加熱制御部
86 位置制御部
【先行技術文献】
【特許文献】
【0086】
【特許文献1】特開2006−90801号公報
【特許文献2】特開平9−138205号公報
【技術分野】
【0001】
本発明は、例えば赤外線サーモグラフィを用いて被検査体の欠陥を検査する方法及びその装置に関するものである。
【背景技術】
【0002】
赤外線サーモグラフィなどによる広域的な温度場の計測は、工業機器における安全性評価などの目的で広く行われている。
【0003】
例えば特許文献1では、被検査体の表面または表面近傍に在る欠陥を検査する検査装置であって、被検査体の表面の所定領域を実質的に一様に加熱する加熱手段と、前記領域から放射された赤外線で形成される赤外線像を撮像する撮像手段と、前記赤外線像を画像解析してその赤外線像における特異部分を判別する画像処理手段とを有するものが開示されている。
【0004】
また特許文献2では、被験体に温度場を与えて赤外線サーモグラフィによる材料の欠陥検出を行うに際し、被験体を、温度制御装置により制御される電子冷熱プレートの表面に密接して加熱・冷却し、真空チャンバにより赤外線カメラと被験体との間を真空状態に保持して、その赤外線カメラで得られる熱画像から材料の欠陥検出を行う技術が開示されている。
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、いずれの技術についても、その計測値は、高次な量である熱流束分布、さらには熱応力分布などを得るのに十分な精度があるとはいえない。一般に、誤差やノイズ、計測不能な領域の存在は、高次な量を得る際に少なからぬ悪影響を及ぼすからである。
【0006】
このため、従来の技術では、いずれも被検査体(或いは被験体)の微小な亀裂を検出することができないおそれがあり、その逆に誤差等を亀裂として誤って検出するおそれさえもあった。
【0007】
本発明は、このような状況に鑑みてなされたものであって、測定値に含まれる誤差等の悪影響をまったくなくして、被検査体の亀裂部分を正確に検出することのできる被検査体の欠陥検査方法及びその装置を提供することを目的としている。
【課題を解決するための手段】
【0008】
本発明(方法)は、被検査体の表面を加熱する加熱工程と、前記加熱された被検査体の表面から放射された赤外線で形成される赤外線像を赤外線カメラで撮像する撮像工程とを備えた被検査体の欠陥検査方法であって、温度場における誤差最小化変分原理を用いたインテリジェントハイブリッド法を適用することにより前記赤外線像を修正する修正工程と、前記修正された赤外線像に基づいて前記被検査体の亀裂部分を判別する判別工程とを備えたことを特徴とするものである。
【0009】
本発明(装置)は、被検査体の表面を加熱する加熱手段と、前記加熱された被検査体の表面から放射された赤外線で形成される赤外線像を撮像する赤外線カメラとを備えた被検査体の欠陥検査装置であって、温度場における誤差最小化変分原理を用いたインテリジェントハイブリッド法を適用することにより前記赤外線像を修正する修正手段と、前記修正された赤外線像に基づいて前記被検査体の亀裂部分を判別する判別手段とを備えたことを特徴とするものである。
【0010】
本発明によれば、温度場における誤差最小化変分原理を用いたインテリジェントハイブリッド法を適用することにより前記赤外線像が修正されるので、その修正された赤外線像には、高次な量である熱流束分布、さらには熱応力分布などを得るのに十分な精度がある。
【0011】
一般には、誤差やノイズ、計測不能な領域の存在は、高次な量を得る際に少なからぬ悪影響を及ぼすのであるが、本発明では、前記修正された赤外線像に基づいて前記被検査体の亀裂部分が判別されるので、これらの影響をまったくなくして、被検査体の亀裂部分を正確に検出することができる。したがって、本発明では、従来技術のような被検査体の亀裂部分の検出もれや、誤検出のおそれが非常に少なくなる。
【0012】
ところで、物体が加熱されたり、冷却されたりする過程、または加熱と冷却とが周期的に繰り返される場合などのように温度が時間によって変化する温度場を非定常温度場という。そこで、請求項2記載の発明のように、前記インテリジェントハイブリッド法は、非定常温度場における誤差最小化変分原理を用いたものであることが好ましい。
【0013】
請求項2記載の発明によれば、前記インテリジェントハイブリッド法は、非定常温度場における誤差最小化変分原理を用いたものであるので、非定常温度場が適用可能な被検査体の亀裂部分を正確に検出することができる。
【0014】
一方、熱がいつも同じ状態で移動する場合のように温度が時間によって変化しないときの温度場を定常温度場という。そこで、請求項3記載の発明のように、前記インテリジェントハイブリッド法は、定常温度場における誤差最小化変分原理を用いたものであることが好ましい。
【0015】
請求項3記載の発明によれば、前記インテリジェントハイブリッド法は、定常温度場における誤差最小化変分原理を用いたものであるので、定常温度場が適用可能な被検査体の亀裂部分を正確に検出することができる。
【0016】
請求項4記載の発明のように、前記判別工程は、前記亀裂部分を画面上に表示する表示工程をさらに備えることが好ましい。
【0017】
請求項4記載の発明によれば、前記判別工程は、前記亀裂部分を画面上に表示する表示工程をさらに備えたので、被検査体の亀裂部分を視覚でもって容易に把握することができる。
【0018】
請求項5記載の発明のように、前記表示工程は、前記亀裂部分の周りの熱流束ベクトルの大きさの変化を、前記画面上に複数の色彩の変化で表示するものであることが好ましい。
【0019】
請求項5記載の発明によれば、前記表示工程は、前記亀裂部分の周りの熱流束ベクトルの大きさの変化を、前記画面上に複数の色彩の変化で表示するものであるので、被検査体の亀裂部分を視覚でもってさらに容易に把握することができる。
【発明の効果】
【0020】
本発明によれば、温度場における誤差最小化変分原理を用いたインテリジェントハイブリッド法を適用することにより前記赤外線像が修正されるので、その修正された赤外線像には、高次な量である熱流束分布、さらには熱応力分布などを得るのに十分な精度がある。
【0021】
一般には、誤差やノイズ、計測不能な領域の存在は、高次な量を得る際に少なからぬ悪影響を及ぼすのであるが、本発明では、前記修正された赤外線像に基づいて前記被検査体の亀裂部分が判別されるので、これらの影響をまったくなくして、被検査体の亀裂部分を正確に検出することができる。したがって、本発明では、従来技術のような被検査体の亀裂部分の検出もれや、誤検出のおそれが非常に少なくなる。
【図面の簡単な説明】
【0022】
【図1】本発明の一実施形態に係る欠陥検査装置の全体構成を示すブロック図である。
【図2】数値シミュレーションによる検証の手順を示すフローチャートである。
【図3】非定常問題の解析用の2次元正方形領域を示す図である。
【図4】正方形領域をメッシュ分割した様子を示す図である。
【図5】数値シミュレーション結果を示す図のうちの、時刻t=100(sec)における実験計測温度場の数値データによる等高線図である。
【図6】数値シミュレーション結果を示す図のうちの、図5の実験計測温度場に基づく熱流束ベクトル図である。
【図7】数値シミュレーション結果を示す図のうちの、各時間ステップの実験計測温度場の数値データを取り込んで、インテリジェントハイブリッド法により10ステップ進行した同時刻の実験計測温度場の等高線図である。
【図8】数値シミュレーション結果を示す図のうちの、図7の実験計測温度場に基づく熱流束ベクトル図である。
【図9】数値シミュレーション結果を示す図のうちの、時刻t=600(sec)における実験計測温度場の数値データによる等高線図である。
【図10】数値シミュレーション結果を示す図のうちの、図9の実験計測温度場に基づく熱流束ベクトル図である。
【図11】数値シミュレーション結果を示す図のうちの、インテリジェントハイブリッド法により60ステップ進行した同時刻の実験計測温度場の等高線図である。
【図12】数値シミュレーション結果を示す図のうちの、図11の実験計測温度場に基づく熱流束ベクトル図である。
【図13】被検査体の亀裂の検査の手順を示すフローチャートである。
【図14】亀裂がある場合の表示部の表示例を示す図である。
【発明を実施するための形態】
【0023】
図1は本発明の一実施形態に係る欠陥検査装置10の全体構成を示すブロック図である。図1に示すように、本実施形態に係る欠陥検査装置10は、例えばステンレス鋼の薄板である被検査体1をx,y方向に移動可能に載置する載置台2と、載置台2上に載置した被検査体1の表面を加熱するヒータ(加熱手段に相当する。)4と、前記加熱された被検査体1の表面から放射された赤外線で形成される赤外線像を撮像する赤外線カメラ3と、コンピュータ8とを備えている。これらの載置台2、ヒータ4、赤外線カメラ3及びコンピュータ8のハードウエア自体は、いずれも市販のものを使用することができる。
【0024】
例えばコンピュータ8は、各種演算等を実行するCPU(Central processing unit)81aと、各種プログラム等を予め記憶しておくROM(Read−only memory)81bと、各種データ等を一時的に記憶するRAM(Randam−access memory)81cとを備えたパーソナルコンピュータであり、これにキーボードやマウスなどの入力部6と、CRTや液晶などの表示部7とがそれぞれ電気的に接続されている。
【0025】
そして、前記ROM81bに記憶しておいた各種プログラム等を前記CPU81aに読み込んで実行することで、前記赤外線像を画像分析する画像処理部82と、前記赤外線像における特異点を判別する特異点判別部83と、赤外線カメラ3の動作を制御するカメラ制御部84と、ヒータ4の動作を制御する加熱制御部85と、載置台2の動作を制御する位置制御部86とがそれぞれ構築されるようになっている。
【0026】
画像処理部82は、赤外線カメラ3で取り込まれた被検査体1の赤外線像と、x,y座標の位置情報とを用いて画像処理を行うものであって、ここでは温度場における誤差最小化変分原理を用いたインテリジェントハイブリッド法を利用して誤差等の修正をする機能をも有するものである(修正手段に相当する)。
【0027】
特異点判別部83は、画像処理部82での修正画像における特異点を抽出し、この特異点を亀裂部分として判別するものである(判別手段に相当する)。
【0028】
カメラ制御部84は、赤外線カメラ3による赤外線像の取り込みタイミングなどを制御し、加熱制御部85は、ヒータ4による被検査体1の加熱温度などを制御し、位置制御部86は、載置台2上に載置された被検査体1のx、y座標位置を制御するものである。なお、各制御部84〜86は、コンピュータ8の外付けのコントローラとして別途設けることとしてもよい。
【0029】
以下、温度場における誤差最小化変分原理を用いたインテリジェントハイブリッド法のうちの非定常温度場における誤差最小化変分原理を用いたインテリジェントハイブリッド法について詳述する。なお、定常温度場における誤差最小化変分原理を用いたインテリジェントハイブリッド法については、本発明者らによる「定常温度場のインテリジェントハイブリッド計測法に関する基礎研究」、日本実験力学会誌、Vol.6、No.4、2006、pp.457−463において詳述しているので、その詳細な説明は割愛する(ただし、同誌においては、被検査体1における亀裂部分の検査への適用可能性については開示も示唆もしていない)。
【0030】
いま、2次元の非定常温度場u(x,y,t)を考える。なお、x,yはそれぞれx,y方向の位置情報であり、tは時間情報である。支配方程式である非定常熱伝導方程式は、熱伝導係数κ が等方かつ一定な場合には次式で記述される。
【0031】
【数1】
ここで,ρ は密度、cは比熱、Qは単位体積・単位時間あたりの発熱量、V は対象領域を表す。初期条件は、既知関数f(x,y)により与えられるものとする。
【0032】
【数2】
また境界条件は、
【数3】
【数4】
ここで、u0は基本境界S1上で与えられた既知温度、qは単位面積あたりの熱流束で、q0は自然境界S2上で与えられた単位面積あたりの既知熱流束、nは自然境界上の外向きが正の法線座標である。これに対応する汎関数I(u) は次式で表される。
【0033】
【数5】
I(u+δu)−I(u)から(δu)2の項を無視して得られる、I(u)の第1変分δI(u)は、各時刻tについて温度場の解uに対してδI(u)=0を満たす。
【0034】
【数6】
この式(数6)にGreenの定理を適用して、S1上で温度は既知ゆえにδu=0に留意すると、解uに対してδI(u)=0が明確な形の式となる。
【0035】
【数7】
すなわち、解uが方程式(数1)や境界条件(数4)を満足することから、任意のδuに対しても、被積分関数ひいては積分値は0となり、δI(u)=0を満たすのである。
【0036】
いま、実験計測による温度場(以下、「実験計測温度場」という。)をuexpとすると、一般に実験計測温度場uexpには実験計測誤差や何らかのノイズが含まれており、そのままでは支配方程式(数1)を満足しない。そこで、修正のための温度場(以下、「修正温度場」という。)umodを加えて正しい温度場uを構成する。すなわち、
【数8】
ただし、計測不能な領域では実験計測温度場uexp=0として、修正温度場umodの値のみが寄与する。また、実験計測温度場uexpは既知だから、δu=δumodである。
【0037】
式(数8)を式(数6)に代入すると、修正温度場umodに対しての、非定常温度場における実験計測誤差を最小化する次の変分原理の式が得られる。
【0038】
【数9】
この式(数9)はGreenの定理を適用して次の形にも書ける。なお、qmodは修正熱流束である。
【0039】
【数10】
これにより、もしも実験計測温度場uexpが正確ならば、修正温度場umodと修正熱流束qmodが0になることがわかる。すなわち、実験計測温度場uexpが支配方程式(数1)と境界条件(数4)を満たすならば右辺は0となり、実験計測温度場uexpがさらに初期条件(数2)を満たすならば修正温度場umodの初期値は0となる。任意のδumodに対して左辺の積分が0となるために、修正温度場umodは発熱項の無い非定常熱伝導方程式に従って0のままであり、修正熱流束qmodも0でなければならないのである。
【0040】
他方、実験計測温度場uexpが正確でない場合には、一般に実験計測温度場uexpは支配方程式(数1)と境界条件(数4)を満たさないから右辺は常には0とならず、修正温度場umodは一般に0でない。この場合、式(数9)または式(数10)を満たす修正温度場umodを求めれば、式(数8)から正しい解uを得ることができる。このとき、式(数9)および式(数10)の右辺は、実験計測温度場uexpの誤差を自己修復する自己修復発熱量と解釈できる。
【0041】
ついで、非定常温度場での実験計測誤差を最小化する変分原理の式(数9)を基にインテリジェントハイブリッド法を定式化する。実験と数値的手法を組み合わせた実験・数値ハイブリッド法で、個数も位置も大きさもわからない誤差を自動的に検出して自動的に消去する“賢い”手法ということで「インテリジェント」と称しているのである。
【0042】
有限要素法における3角形要素の1つの要素nにおける形状関数をNj(x,y)、節点温度をuj(t)(i=1,2,3)として、この要素内の温度uは、
【数11】
と表すことができる。ここで、{u}nは要素nの節点温度の列ベクトル、上付き添え字Tはベクトルや行列の転置を表す。節点温度uiも式(数8)を満たすから、式(数11)は式中の文字uの右肩にすべてexp、またはすべてmodを付しても成り立つ。
【0043】
同様に、節点iでのδuの値をδuiとして、
【数12】
と表せる。δu=δumodゆえ、式(数12)の式中の文字uはすべて修正温度場umodと同一視できる。
【0044】
温度勾配の列ベクトル{g},{δg}を
【数13】
【数14】
と定義すると、式(数11)と式(数12)のxおよびyによる偏微分により、{g},{δg}は、形状関数の勾配から成る行列[B]を用いて,次のように表される。
【0045】
【数15】
【数16】
ここで、
【数17】
である。なお、式(数16)の両辺を転置すると、
【数18】
である。
【0046】
式(数11)を時間tで偏微分して、時間微分はドットを付して表すことにすると、
【数19】
要素nの領域をVnと表し、その自然境界をS2nと表して、領域Vの要素分割を考える。すると、誤差最小化変分原理の式(数9)は,ベクトル表記を用いるなどして,
【数20】
と表せる。ここで、Σは全要素にわたる和を表す。
【0047】
式(数11)〜式(数19)に適宜expまたはmodを付して式(数20)に代入し、次式を得る。
【0048】
【数21】
空間座標に依存しない部分は積分の外に出せて、
【数22】
{δumod}nは任意であるから、以下のように、インテリジェントハイブリッド法の方程式を得る。
【0049】
【数23】
【数24】
【数25】
【数26】
ここで、[K]は全体の熱伝導マトリックス、[C]は全体の熱容量マトリックス、[k]nは要素nの熱伝導マトリックス、[c]nは要素nの熱容量マトリックス、{umod}は修正温度場の全体節点温度場ベクトルである。また,右辺の{R}は実験計測温度場の誤差を自己修復する自己修復発熱量の全体節点ベクトルと解釈できる。
【0050】
式(数23)を解いて修正温度場{umod}を求め、実験計測温度場{uexp}に加えることにより、実験計測誤差が自動的に検出・消去された正しい温度場を得ることができる。
【0051】
以下、計算スキーム例を示す。時間ステップ幅をΔtとして、時間ステップm→m+1の素過程を考える。
【0052】
時間微分は差分近似により、
【数27】
と表せる。また、パラメータθ(0≦θ≦1)を用いて、
【数28】
とする。パラメータθ=0の場合が前進差分法、パラメータθ=1の場合が後退差分法、パラメータθ=1/2の場合がCrank−Nicholson法である。
【0053】
さて、インテリジェントハイブリッド法を用いるべき状況は種々想定されるが、ここでは簡単な場合を例にとる。
【0054】
まず、計算のための時間ステップ幅Δtが一定かつ実験計測温度場(値)uexpの測定時間間隔と等しいと仮定する。この場合、実験計測温度場uexpと修正温度場umodとで時間ステップ幅Δtと時間ステップmとは共通となり、式(数27),式(数28)は式中のuの右肩にすべてexp、またはすべてmodを付しても成り立つ。さらに、発熱量Q、自然境界S2上の熱流束q0が時間に依らないと仮定すると、式(数23),式(数26)より、
【数29】
を得る。
【0055】
上式は、m+1ステップの実験計測温度場{uexp}m+1に対する修正温度場{umod}m+1を求めるために、当該実験計測温度場{uexp}m+1と前ステップの正しい温度場{u}mを使用する形になっている。前ステップの正しい温度場{u}mは、前ステップでの計算で得た修正温度場{umod}mを同ステップの実験計測温度場{uexp}mに加えて得られるのであり、計算の開始時点において既知の初期条件を想定すれば、以降の計算は順次行えることになる。
【0056】
また、式(数29)を非定常2次元温度場における通常の有限要素法のスキームと比較すると、求められるものが修正温度場{umod}であることと、右辺下段の2つの項において実験計測温度場{uexp}を組み入れていることが相違する点である。したがって、実験計測温度場{uexp}が既に満たしている境界条件に配慮しつつ、非定常2次元温度場の有限要素法のプログラムを適切に改造すれば、非定常2次元温度場に対するインテリジェントハイブリッド法のためのプログラムを得ることができる。
【0057】
引き続いて、インテリジェントハイブリッド法による誤差の自動検出・自動消去の効果を検証するための数値シミュレーション例を示す。図2は検証の手順を示すフローチャート、図3は非定常問題の解析用の2次元正方形領域を示す図、図4は正方形領域をメッシュ分割した様子を示す図、図5〜図12は数値シミュレーション結果を示す図である。
【0058】
この数値シミュレーションは、図1に示す欠陥検査装置10の載置台2と、赤外線カメラ3と、ヒータ4と、コンピュータ8の各制御部84〜86の機能とを使用せず、全てのデータを入力部6から入力する場合に相当する。
【0059】
まず図2において、入力部6を用いてコンピュータ8のRAM81cに解析解のある非定常問題を設定する(ステップS1)。ついで、解析解に基づき、時間発展の各ステップに対応する数値データを作成する(ステップS2)。ついで、実験計測温度場{uexp}を想定して、前記ステップS2のデータに計測不能領域や誤差を人為的に混入した数値データを作成する(ステップS3)。ついで、
画像処理部82で、計算スキーム(数29)に従って、前記ステップS3のデータを実験計測温度場{uexp}として用いて計算を実行して、求めた修正温度場{umod}を、前記ステップS3のデータに加えて誤差が自動的に検出・消去された温度場を得る(ステップS4)。そして、特異点判別部83で、表示部7に結果をグラフ表示し、前記ステップS2と前記ステップS4との数値データの比較によって評価する(ステップS5)。
【0060】
図3に示すような辺の長さLの2次元正方形領域の上辺と下辺とが断熱(qy=0)、右辺が基準温度(u=0)に保たれるとする。時刻t=0に左辺の温度が0からu0に突然昇温(以後一定)した場合の、初期温度u(x,y,0)=0からの時間発展を考える。
【0061】
式(数1)の解析解は、変数分離とFourier展開により、
【数30】
と得られる。時刻t→∞では、総和Σの項は0となり、定常解u=u0[1−(x/L)]に至る。なお、数値データを作る際の総和Σの項数は1024とした。
【0062】
ついで、図4に示すように、正方形領域を縦横各20分割して、20×20×2=800個の3角形要素を配置した。総節点数は、21×21=441個である。
【0063】
今回の例では、計測不能領域の個数・位置・大きさが時間変化しない場合を想定した。計測不能領域として、大(L/4×L/4)・小(L/5×L/10)各1個の矩形領域を設定し、対応する6×6=36個および5×3=15個の計51節点上で計測値を0として扱った(図4中の斜線部分で示すL/4≦x≦L/2,L/2≦y≦3L/4の矩形領域と、7L/10≦x≦9L/10,L/10≦y≦L/5の矩形領域である)。
【0064】
誤差を混入する節点の数と相対誤差の最大値も時間に依らず固定したが、誤差を加える節点の選択(計測不能領域を除く。)と加える誤差の大きさは、時間ステップごとに乱数を用いて決定した。乱数で選択された節点iでは、ξ を一様乱数(0≦ξ≦1)として、
【数31】
により誤差を加えた。相対誤差の最大値は1/2÷4より12.5%となる。また、今回の例では誤差を混入する節点の数は50個に設定した。
【0065】
計算の際の寸法や物性値は、図3における辺の長さL=0.4(m)、基準温度u=0(℃)、左辺での昇温温度u0=200(℃)、熱伝導率κ=100(W/mK)、単位体積あたりの熱容量ρc=3×106(J/m3K)である。よって、定常状態に至る過程を特徴づける代表時間t0=L2ρc/κ=4800(sec)である。
【0066】
時間発展に関しては、時間ステップ幅Δt=10(sec)、パラメータθ=1(後退差分法)で、時刻t=0(sec)の初期温度場u(x,y,0)=0から60ステップ後の時刻t=600(sec)までおこなった。
【0067】
計算結果の中から、温度上昇がまだ図3における右半分には明瞭に現れていない時刻t=100(sec)と、温度上昇が図3におけるほぼ全域にわたった時刻t=600(sec)とを示す。
【0068】
時刻t=100(sec)における実験計測温度場{uexp}の数値データによる等高線図が図5である。等高線は、式(数31)に従い、乱数を使って混入した誤差によりがたつき、計測不能領域により大きく歪められている。そして、その温度場{uexp}に基づく熱流束ベクトル図が図6である。熱流束ベクトルの大きさや向きが乱されているのがわかる。
【0069】
これに対して、各時間ステップの実験計測温度場{uexp}の数値データを取り込んで、インテリジェントハイブリッド法により10ステップ進行した同時刻の温度場{uexp}の等高線図が図7である。そして、その温度場{uexp}に基づく熱流束ベクトル図が図8である。また、その左辺上の熱流束ベクトルの大きさはq=1.9877×105(W/m2)である。誤差や計測不能領域による乱れは自動的に検出・消去されており、解の1次元性が明確に現れている。
【0070】
解析解からの温度差の絶対値の最大は、x=0.06(m)、y=0.36(m)の節点で生じ、そこでは解析解温度92.4865(℃)から1.7789(℃)減少となっている。これは、率にして1.9234%の違いであり、現象を特徴づける代表温度u0=200(℃)に対する比率では0.88945%としかならない。なお、相対的な差(=解析解からの温度差÷解析解の温度)の絶対値の最大としては、9.4375倍の増加となるところがあるが、それは解析解温度が5.9721×10−4(℃)と実質的にまだ0(℃)と見なせる節点x=0.38(m)、y=0(m)上のことである。したがって、全体としては解析解と良い一致を示していると言え、誤差の自動検出・自動消去は良好におこなわれていることがわかる。
【0071】
同様に、時刻t=600(sec)における実験計測温度場{uexp}の数値データによる等高線図が図9である。そして、その温度場{uexp}に基づく熱流束ベクトル図が図10である。インテリジェントハイブリッド法によって60ステップ進行した同時刻の温度場{uexp}の等高線図が図11である。そして、その温度場{uexp}に基づく熱流束ベクトル図が図12であり、その左辺上の熱流束ベクトルの大きさはq=0.8014×105(W/m2)である。これらにおいても、インテリジェントハイブリッド法によって誤差や計測不能領域による乱れが除去されていることが明瞭に示されている。
【0072】
解析解からの温度差の絶対値の最大は、x=0.16(m)、y=0.34(m)の節点で生じ、そこでは解析解温度84.4676(℃)から0.3394(℃)減少となっている。これは、率にして0.4018%の違いであり、代表温度に対する比率では0.1697%となる。相対的な差の絶対値の最大は、x=0.38(m)、y=0.4(m)の節点で生じ、そこでは解析解温度4.3409(℃)から1.0589%減少となっている。したがって、全節点において解析解と良い一致を示しており、誤差の自動検出・自動消去が良好におこなわれていることがわかる。
【0073】
これら2つの時刻において代表されるように、各時刻における解析解との比較の結果は、誤差の自動検出・自動消去が良好におこなわれている。
【0074】
ここでは,非定常な2次元温度場に対する誤差最小化変分原理を導出した。そして,それに基づき、インテリジェントハイブリッド法を定式化した。さらに、その計算スキームの例を提示して検討し、非定常な2次元温度場の有限要素法による計算プログラムからの改造のポイントを指摘した。そして、簡単な解析解がある場合の数値シミュレーション例により、本手法の有効性を示した。なお、定常な2次元温度場に対する誤差最小化変分原理を用いたインテリジェントハイブリッド法についても、同様に、その手法についての有効性を示すことができる。
【0075】
引き続いて、本欠陥検査装置10の全ての機能を使用して、被検査体1の亀裂の検査を行うものとした。なお、図13は被検査体1の亀裂の検査を行うときの手順を示すフローチャート、図14は亀裂がある場合の表示部7の表示例を示す図である。厳密に言えば、図14に示す表示例は、上記シミュレーションと同様の数値データから導出したものであり、その数値は無次元化しているが、本欠陥検査装置10の全ての機能を使用して、被検査体1の亀裂の検査を行ったときの表示部7の画面上においても、同様の表示が得られることは容易に理解される。
【0076】
まず、図13に示すように、本欠陥検出装置10の載置台2上に被検査体1を載置する。すると、この被検査体11は、コンピュータ8の位置制御部86の制御の下に、載置台2上で、x、y方向に所定ピッチで移動される(ステップS11)。ついで、この移動する被検査体1の表面は、加熱制御部85の制御の下に、ヒータ4で加熱される(ステップS12:加熱工程に相当する)。ついで、被検査体1の表面から放射される赤外線が、カメラ制御部84の制御の下に、赤外線カメラ3で撮像され、その撮像データがコンピュータ8のRAM81cに一時的に記憶される(ステップS13:撮像工程に相当する)。
【0077】
ついで、計算スキーム(数29)に従って、前記ステップS13でRAM81cに一時的に記憶された撮像データを読み出し、画像処理部82で、実験計測温度場{uexp}mとして用いて計算を実行して、求めた修正温度場{umod}を、前記ステップS13の撮像データに加えて誤差が自動的に検出・消去された温度場を得る(ステップS14:修正工程に相当する)。そして、特異点判別部83で、表示部7に結果をグラフ表示し、亀裂部分が有るか否かを評価する(ステップS15:判別工程、表示工程に相当する)。
【0078】
表示部7は、図14に示すように、亀裂部分周りの熱流束ベクトルの大きさの変化を画面上に複数の色彩の変化で表示する。例えば、温度の比較的低い所を青色で、比較的高い所を赤色で示すものとするが、図14中ではグレースケールとなっているので、いずれも黒色となっており、その中間部が白色となっている。そして、x=0.1、y=−0.05の位置と、x=0.1、y=0.25の位置とで、それぞれ熱流束ベクトルの大きさはq=3.5×105程度となっており、その周囲では、熱流束ベクトルの大きさはq=0〜0.3×105程度となっていることから、明らかに2箇所のピークが(特異点)見られる。これらのピークは、被検査体1の亀裂の端部を示すものであるから、両ピーク間に被検査体1の亀裂が存在することがわかる。この亀裂は、従来の赤外線サーモグラフィなどでは見つからなかったほど微小なものである。このように、画面上で色付けをすることにより、被検査体1の亀裂部分を視覚的に容易に把握することができるようになる。
【0079】
以上説明したように、本実施形態によれば、非定常温度場における誤差最小化変分原理を用いたインテリジェントハイブリッド法を適用することにより、赤外線カメラ3で撮像された赤外線から形成される赤外線像が修正されるので、その修正された赤外線像には、高次な量である熱流束分布、さらには熱応力分布などを得るのに十分な精度がある。
【0080】
一般には、誤差やノイズ、計測不能な領域の存在は、高次な量を得る際に少なからぬ悪影響を及ぼすのであるが、本実施形態では、前記修正された赤外線像に基づいて被検査体1の亀裂部分が判別されるので、これらの影響をまったくなくして、被検査体1の亀裂部分を正確に検出することができる。したがって、本実施形態では、従来技術のような被検査体1の亀裂部分の検出もれや、誤検出のおそれが非常に少なくなる。
【0081】
なお、上記実施形態では、被検査体1の亀裂部分の検査において、非定常温度場における誤差最小化変分原理を用いたインテリジェントハイブリッド法を適用して、良好な結果を得ることができたが、定常温度場における誤差最小化変分原理を用いたインテリジェントハイブリッド法を適用しても、同様に、良好な結果を得ることができる。
【0082】
また、上記実施形態では、欠陥検査装置10の被検査体1に対して、いずれも2次元の非定常温度場を与えているが、3次元の非定常温度場を与えることとしてもよい。その場合には、亀裂の深さ等のより詳細な検査を行える可能性がある。定常温度場についても同様である。
【0083】
また、上記実施形態では、被検査体1をx、y方向に移動可能な載置台2に載置しているが、被検査体1が原子炉容器などのように大型のものであれば、その被検査体1を固定したままで、赤外線カメラ3を走査させることにより、同様の検査を行うことができる。
【0084】
また、上記実施形態では、加熱手段として、ヒータ4を使用しているが、レーザやランプなど他の加熱手段を使用してもよい。
【符号の説明】
【0085】
10 検査装置
1 被検査体
2 載置台
3 赤外線カメラ
4 ヒータ(加熱手段に相当する。)
6 入力部
7 表示部
8 コンピュータ
81a CPU
81b ROM
81c RAM
82 画像処理部(修正手段に相当する。)
83 特異点判別部(判別手段に相当する。)
84 カメラ制御部
85 加熱制御部
86 位置制御部
【先行技術文献】
【特許文献】
【0086】
【特許文献1】特開2006−90801号公報
【特許文献2】特開平9−138205号公報
【特許請求の範囲】
【請求項1】
被検査体の表面を加熱する加熱工程と、前記加熱された被検査体の表面から放射された赤外線で形成される赤外線像を赤外線カメラで撮像する撮像工程とを備えた被検査体の欠陥検査方法であって、
温度場における誤差最小化変分原理を用いたインテリジェントハイブリッド法を適用することにより前記赤外線像を修正する修正工程と、
前記修正された赤外線像に基づいて前記被検査体の亀裂部分を判別する判別工程とを備えたことを特徴とする被検査体の欠陥検査方法。
【請求項2】
前記インテリジェントハイブリッド法は、非定常温度場における誤差最小化変分原理を用いたものであることを特徴とする請求項1記載の被検査体の欠陥検査方法。
【請求項3】
前記インテリジェントハイブリッド法は、定常温度場における誤差最小化変分原理を用いたものであることを特徴とする請求項1記載の被検査体の欠陥検査方法。
【請求項4】
前記判別工程は、前記亀裂部分を画面上に表示する表示工程をさらに備えたことを特徴とする請求項1〜3のいずれか1項に記載の被検査体の欠陥検査方法。
【請求項5】
前記表示工程は、前記亀裂部分の周りの熱流束ベクトルの大きさの変化を、前記画面上に複数の色彩の変化で表示するものであることを特徴とする請求項4記載の被検査体の欠陥検査方法。
【請求項6】
被検査体の表面を加熱する加熱手段と、前記加熱された被検査体の表面から放射された赤外線で形成される赤外線像を撮像する赤外線カメラとを備えた被検査体の欠陥検査装置であって、
温度場における誤差最小化変分原理を用いたインテリジェントハイブリッド法を適用することにより前記赤外線像を修正する修正手段と、
前記修正された赤外線像に基づいて前記被検査体の亀裂部分を判別する判別手段とを備えたことを特徴とする被検査体の欠陥検査装置。
【請求項1】
被検査体の表面を加熱する加熱工程と、前記加熱された被検査体の表面から放射された赤外線で形成される赤外線像を赤外線カメラで撮像する撮像工程とを備えた被検査体の欠陥検査方法であって、
温度場における誤差最小化変分原理を用いたインテリジェントハイブリッド法を適用することにより前記赤外線像を修正する修正工程と、
前記修正された赤外線像に基づいて前記被検査体の亀裂部分を判別する判別工程とを備えたことを特徴とする被検査体の欠陥検査方法。
【請求項2】
前記インテリジェントハイブリッド法は、非定常温度場における誤差最小化変分原理を用いたものであることを特徴とする請求項1記載の被検査体の欠陥検査方法。
【請求項3】
前記インテリジェントハイブリッド法は、定常温度場における誤差最小化変分原理を用いたものであることを特徴とする請求項1記載の被検査体の欠陥検査方法。
【請求項4】
前記判別工程は、前記亀裂部分を画面上に表示する表示工程をさらに備えたことを特徴とする請求項1〜3のいずれか1項に記載の被検査体の欠陥検査方法。
【請求項5】
前記表示工程は、前記亀裂部分の周りの熱流束ベクトルの大きさの変化を、前記画面上に複数の色彩の変化で表示するものであることを特徴とする請求項4記載の被検査体の欠陥検査方法。
【請求項6】
被検査体の表面を加熱する加熱手段と、前記加熱された被検査体の表面から放射された赤外線で形成される赤外線像を撮像する赤外線カメラとを備えた被検査体の欠陥検査装置であって、
温度場における誤差最小化変分原理を用いたインテリジェントハイブリッド法を適用することにより前記赤外線像を修正する修正手段と、
前記修正された赤外線像に基づいて前記被検査体の亀裂部分を判別する判別手段とを備えたことを特徴とする被検査体の欠陥検査装置。
【図1】


【図2】
【図3】
【図4】
【図5】

【図6】

【図7】
【図8】
【図9】

【図10】

【図11】
【図12】

【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2010−160122(P2010−160122A)
【公開日】平成22年7月22日(2010.7.22)
【国際特許分類】
【出願番号】特願2009−4154(P2009−4154)
【出願日】平成21年1月12日(2009.1.12)
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り 平成20年9月 日本応用数理学会発行の「2008年度年会 講演予稿集」に発表
【出願人】(504150450)国立大学法人神戸大学 (421)
【Fターム(参考)】
【公開日】平成22年7月22日(2010.7.22)
【国際特許分類】
【出願日】平成21年1月12日(2009.1.12)
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り 平成20年9月 日本応用数理学会発行の「2008年度年会 講演予稿集」に発表
【出願人】(504150450)国立大学法人神戸大学 (421)
【Fターム(参考)】
[ Back to top ]