
被災者救助支援システム、情報処理方法
【課題】地域や場所の制限無く利用が可能であって、迅速かつ効率的に被災者の位置を特定することのできる被災者救助支援システムを提供する。
【解決手段】被災地には複数のポータブル基地局が設置される。ポータブル基地局は、被災者が所持するRFIDタグとUWB−IRによる通信を行ってタグIDと位置推定のためのパラメータから成る位置パラメータ情報を生成し、これを測位サーバに送信する。測位サーバは、ポータブル基地局から送信された位置パラメータ情報により、RFIDタグ100ごとの位置を推定して記憶する。
【解決手段】被災地には複数のポータブル基地局が設置される。ポータブル基地局は、被災者が所持するRFIDタグとUWB−IRによる通信を行ってタグIDと位置推定のためのパラメータから成る位置パラメータ情報を生成し、これを測位サーバに送信する。測位サーバは、ポータブル基地局から送信された位置パラメータ情報により、RFIDタグ100ごとの位置を推定して記憶する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、被災者の救助活動に際して利用される被災者救助支援システムと、この被災者救助支援システムにおける情報処理方法に関する。
【背景技術】
【0002】
地震、台風、津波などによる家屋の倒壊、土砂崩れや雪崩などによって行方不明になった被災者を救助するにあたり、人手による捜索が行われているのが実情である。つまり、被災者がいる場所を探すためには、例えば捜索者が大声で呼びかけを行い、その呼びかけに応答して帰ってきた声を頼りに被災者を探すというものである。そして、呼びかけを行っても応答がない場合には、捜索者は、被災者がいるかもしれない場所の見当をつけながら、その場所を中心に探していくほかない。
【0003】
このように、これまでの人手に頼った救助活動では、行方不明になっている多くの被災者の位置を明確に特定することが難しい。一般に、被災から72時間以内であれば被災者の生存率は相当に高いとされている。したがって、上記のような制限時間内にできるだけ多くの行方不明者を探し出して救助できるようにするには、行方不明者のいる位置を的確に把握できるようにすることが必要である。
【0004】
そこで、従来技術として、捜索者がまずはアクティブタグの信号を受信することで大まかな位置を把握した後、携帯型のパッシブ型リーダライタを利用してパッシブタグの位置を捜索しようというシステムが提案されている(例えば、非特許文献1参照)。また、他の従来技術として、RFID機能を有する非接触型データ受送信体から情報を情報読出手段により定期的に読み出し、この読み出した情報に基づいて非接触型データ受送信体の所在を定期的に位置情報として保存するという技術が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2006−127111号公報
【非特許文献】
【0006】
【非特許文献1】総務省信越総合通信局 平成22年度 地域における安心安全のためのRFIDの利活用に関する調査検討会 報告書、p.34-38
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかし、上記非特許文献1に記載されている技術では、捜索者の各々が携帯型のリーダライタを所持して移動しながら、パッシブタグと通信ができる場所を探していく必要がある。つまり、人手への依存度が依然として高く、被災者の早期発見に関して効率的であるとはいえない。
【0008】
また、特許文献1に記載されている技術の場合、非接触型データ受送信体から読み出した情報に基づいて位置情報を保存する情報読出手段は、例えば建物の内部や野外設備などに事前に設置されている必要がある。このために、情報読出手段が設置されていない場所や地域で災害が発生した場合には対応できないという問題がある。
【0009】
そこで本発明は、上記した課題を考慮して、地域や場所の制限無く利用が可能であって、迅速かつ効率的に被災者の位置を特定することのできる被災者救助支援システムを提供することを目的としている。
【課題を解決するための手段】
【0010】
本発明は、上述の課題を解決すべくなされたもので、通信タグと、被災地に設置される複数の可搬型の基地局と、測位装置から成り、前記通信タグは、インパルス波形によりデータの送受信が行われる第1の無線通信方式により通信を行うタグ通信部と、前記タグ通信部により通信相手の前記基地局に対してタグ識別子を送信させるタグ制御部を備え、前記基地局は、前記第1の無線通信方式により通信を行う第1通信部と、第2の無線通信方式による無線通信を経由して前記測位装置と通信するための第2通信部と、前記第1通信部による前記通信タグとの通信に応じて、当該通信タグの位置推定に利用する所定のパラメータと当該通信タグから送信されたタグ識別子とを対応付けて生成した位置パラメータ情報を、前記第2通信部により前記測位装置に対して送信させるための制御を行う基地局制御部とを備え、前記測位装置は、前記基地局から当該測位装置に送信された位置パラメータ情報と、当該位置パラメータ情報の送信元基地局の位置に基づいて、通信タグごとの位置を推定し、通信タグごとの推定位置情報を前記記憶部に記憶させる測位制御部を備えることを特徴とする被災者救助支援システムである。
【0011】
また、本発明は、通信タグと、被災地に設置される複数の可搬型の基地局と、測位装置から成る情報処理システムにおける情報処理方法であって、前記通信タグにおいて、インパルス波形によりデータの送受信が行われる第1の無線通信方式により通信を行うタグ通信部により通信相手の前記基地局に対してタグ識別子を送信させるタグ制御ステップと、
前記基地局において、前記第1の無線通信方式により通信を行う第1通信部による前記通信タグとの通信に応じて、当該通信タグの位置推定に利用する所定のパラメータと当該通信タグから送信されたタグ識別子とを対応付けて生成した位置パラメータ情報を、第2の無線通信方式による通信を行う前記第2通信部により前記測位装置に対して送信させるための制御を行う基地局制御ステップと、前記測位装置において、前記基地局から当該測位装置に送信された位置パラメータ情報と、当該位置パラメータ情報の送信元基地局の位置に基づいて、通信タグごとの位置を推定し、通信タグごとの推定位置情報を記憶部に記憶させる測位制御ステップとを備えることを特徴とする情報処理方法である。
【発明の効果】
【0012】
本発明によれば、被災者救助支援システムとして、地域や場所の制限無く利用が可能であり、迅速かつ効率的に被災者の位置を特定することができるという効果が得られる。
【図面の簡単な説明】
【0013】
【図1】本発明の第1の実施形態としての被災者救助支援システムの構成例を示す図である。
【図2】第1の実施形態としてのRFIDタグの位置算出原理の一例を模式的に示す図である。
【図3】第1の実施形態としてのRFIDタグの構成例を示すブロック図である。
【図4】第1の実施形態としてのポータブル基地局の構成例を示すブロック図である。
【図5】第1の実施形態としてのポータブル基地局が送信する位置パラメータ情報の構造例を示す図である。
【図6】第1の実施形態としての測位サーバの構成例を示すブロック図である。
【図7】第1の実施形態としての測位サーバが記憶する、基地局位置データベースおよびRFIDタグ位置データベースの構造例を示す図である。
【図8】第1の実施形態としてのポータブル基地局とRFIDタグの通信プロトコル(第1例)を模式的に示す図である。
【図9】第1例の通信プロトコルに対応してRFIDタグが実行する処理手順例を示すフローチャートである。
【図10】第1の実施形態としてのポータブル基地局とRFIDタグの通信プロトコル(第2例)を模式的に示す図である。
【図11】第2例の通信プロトコルに対応してRFIDタグが実行する処理手順例を示すフローチャートである。
【図12】第1の実施形態において、RFIDタグからの信号の受信に応じてポータブル基地局が実行する処理手順例を示すフローチャートである。
【図13】第1の実施形態としての測位サーバが実行する処理手順例を示すフローチャートである。
【図14】第2の実施形態としてのポータブル基地局の構成例を示すブロック図である。
【図15】第2の実施形態としてのポータブル基地局の自己位置測位の手法例を模式的に示す図である。
【図16】図15の自己位置測位手法に対応してポータブル基地局が実行する処理手順例を示すフローチャートである。
【図17】第3の実施形態としての被災者救助支援システムの構成例を示す図である。
【図18】第3の実施形態における携帯端末装置の構成例を示すブロック図である。
【図19】第4の実施形態としての被災者救助支援システムの構成例を示す図である。
【図20】第4の実施形態におけるポータブル基地局の構成例を示すブロック図である。
【図21】第4の実施形態におけるポータブル基地局が実行する位置パラメータ情報共有のための処理手順例を示すフローチャートである。
【図22】第5の実施形態における被災者救助支援システムの構成例を示す図である。
【図23】第5の実施形態における測位基地局の構成例を示すブロック図である。
【図24】第5の実施形態におけるポータブル基地局が実行する通信部切り替えのための処理手順例を示すフローチャートである。
【発明を実施するための形態】
【0014】
<第1の実施形態>
[被災者救助支援システムの構成]
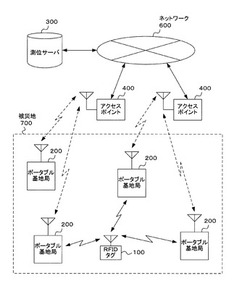
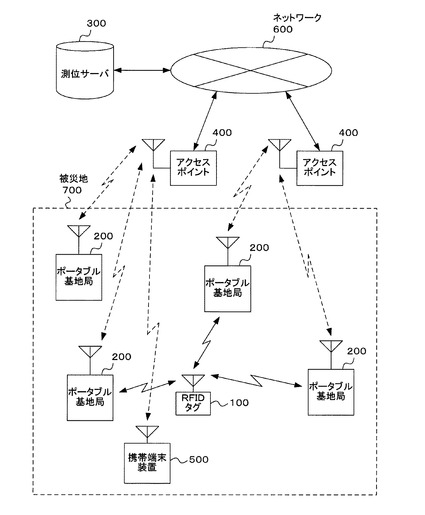
以下、本発明の実施形態による被災者救助支援システムについて説明する。図1は、第1の実施形態としての被災者救助支援システムの構成例を示している。本実施形態の被災者救助支援システムは、RFIDタグ100、ポータブル基地局200および測位サーバ300から成る。また、ポータブル基地局200を無線通信経由でネットワーク600と接続するためのアクセスポイント400を備える。
【0015】
RFID(Radio Frequency IDentification)タグ100は、ポータブル基地局200と第1の無線通信方式により通信を行ってタグIDを送信する。タグIDは、RFIDタグ100を一意に識別するための識別子である。
【0016】
上記第1の無線通信方式には、RFIDタグ100の位置を測定することが求められる。そこで、本実施形態では、このような測位機能に対応して、第1の無線通信方式としてUWB−IR(Ultra-Wideband Impulse radio:超広帯域無線)を採用する。UWB−IRは、例えば数ナノ秒程度のきわめて短時間のインパルス状の信号により通信を行う。この特性を利用して、UWB−IRは、例えば数十センチの精度で測位を行うことが可能である。また、UWB−IRは、1GHz程度の非常に広い帯域に拡散して通信が行われるために、同じ周波数帯域を利用する他の無線機器と混信することがなく、消費電力も少ない。本実施形態では、後述するように、このUWB−IRによる高精度な位置測定機能を利用してRFIDタグ100、すなわち、被災者の位置を特定する。
【0017】
このRFIDタグ100は、災害時においても被災者が所持しているようにするため、個人が平常時から携帯する用途のものに適用される。具体的には、キーホルダー、携帯電話のストラップ、学生証、社員証などとしてその外形形状が形成される。また、携帯電話などの内部に備えることも考えられる。また、RFIDタグ100は、災害時に簡単に破損してしまわないように堅牢性を有することが求められる。このために、RFIDタグ100は、例えば樹脂、ガラス繊維、強化プラスチックなどによりカードや筐体に封入された構造を有する。
【0018】
また、このRFIDタグ100は、例えば上記第1の無線通信方式のもとで一定以上の通信距離を確保するために、パッシブではなく、バッテリにより駆動されるアクティブタイプとして構成する。このバッテリには、例えばコイン電池などの一次電池を採用することがまず考えられるが、例えばリチウムイオンバッテリやリチウムポリマーバッテリなどの2次電池を採用することも考えられる。
【0019】
ポータブル基地局200は、被災地700において複数が配置されるもので、通信可能範囲に存在するRFIDタグ100と上記第1の無線通信方式により通信を行う。そして、その通信に基づいて生成した位置パラメータ情報をネットワーク600経由で測位サーバ300に送信する。つまり、ポータブル基地局200は、通信を行ったRFIDタグ100から送信されるタグIDを受信して取得するとともに、このRFIDタグ100との通信時の状態に基づいて、RFIDタグ100の位置推定に用いられるパラメータを生成する。そして、タグIDにパラメータを対応付け、位置パラメータ情報として送信する。なお、位置パラメータ情報の具体例については後述する。
【0020】
また、ポータブル基地局200は、測位サーバ300と通信を行うにあたり、第2の無線通信方式によってアクセスポイント400と通信を行う。アクセスポイント400は、第2の無線通信方式によって接続された通信装置をネットワーク600に接続するための中継機器である。ポータブル基地局200は、このアクセスポイント400との無線通信によって、ネットワーク600経由で測位サーバ300と通信を行うことができる。この第2の無線通信方式としては、例えば、IEEE802.11a/b/g/n等の無線LANを挙げることができる。また、GSM(登録商標)、W−CDMA(登録商標)、CDMA2000(登録商標)、LTE等のセルラーネットワークや、モバイルWiMAX(登録商標)、IEEE802.20等のMAN(Metropolitan Area Network)などを採用することも考えられる。
【0021】
これらのポータブル基地局200は、被災地700において、被災者救助支援システムを使用する捜索者や捜索隊によって、或る程度の距離を隔てた状態で被災地700の各所に設置される。この際、ポータブル基地局200間を設置する間隔は、厳密に一定である必要はない。具体的に、RFIDタグとの通信距離が数十mから100m程度であると想定した場合には、これに応じて、約数十mから100m程度の間隔を空けて、設置しやすい場所に適当に配置されてよい。
【0022】
また、第1の実施形態においては、このように設置したポータブル基地局200の各位置の情報を取得し、この取得したポータブル基地局200ごとの位置情報を、次に説明する測位サーバ300に記憶させる。具体的には、例えば捜索者が、ポータブル基地局200を設置するごとにGPSなどを利用してその位置を測位しておくようにする。そして、これらの記録された位置を収集し、所定の入力デバイスなどを用いて、測位サーバ300に入力してポータブル基地局200のIDと対応付けて記憶させるようにする。
【0023】
測位サーバ300は、ポータブル基地局200から送信される位置パラメータ情報に基づいて、後述するように、RFIDタグ100の位置を推定する。なお、この位置推定の手法例については後述する。そして、このRFIDタグ100ごとの推定位置の情報をRFIDタグ位置データベースとして記憶する。
【0024】
[位置推定手法]
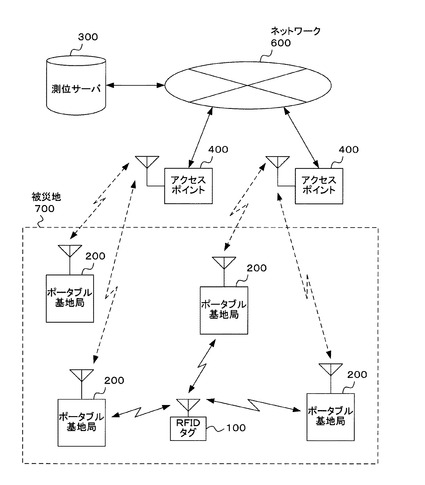
次に、図2を参照して、第1の無線通信方式を利用した位置推定について説明する。図2には、1つのRFIDタグ100と、3つのポータブル基地局200−1〜200−3が示されている。なお、ここでポータブル基地局200−1〜200−3の位置については既知であるとする。
【0025】
まず、RFIDタグ100とポータブル基地局200−1が通信を行うことにより、その通信時間や受信信号強度などに基づいてRFIDタグ100とポータブル基地局200−1の距離d1が算出される。この段階では、RFIDタグ100の位置は、ポータブル基地局200−1を中心とする半径d1の円周C1上であると推定されることになる。
【0026】
次いで、RFIDタグ100とポータブル基地局200−2が通信を行うことにより、RFIDタグ100とポータブル基地局200−2の距離d2も算出されることになる。このように、1つのRFIDタグ100に対する2つのポータブル基地局200−1および200−2の各距離d1、d2が求められた段階で、RFIDタグ100の位置は、ポータブル基地局200−1に対応する円周C1と、ポータブル基地局200−2を中心とする半径d2の円周C2との交点として求められる。円周C1とC2の交点は2つ存在するため、この段階では、RFIDタグ100の位置は、さらに絞り込まれ、この2つの交点のいずれかであるとして推定されることになる。
【0027】
そして、RFIDタグ100とポータブル基地局200−3が通信を行うことにより、RFIDタグ100とポータブル基地局200−3の距離d3も算出されることになる。これにより、RFIDタグ100の位置は、円周C1と、円周C2と、ポータブル基地局200−3を中心とする半径d3の円周C3との交点として推定されることになる。つまり、RFIDタグ100と3つのポータブル基地局200−3の距離が求められることに応じて、1点のRFIDタグ100の位置が推定される。
なお、RFIDタグ100とポータブル基地局200−1〜3との通信は同時に行われてもよい。すなわち、RFIDタグ100が送信した信号をポータブル基地局200−1〜3が同時に受信することで、位置の推定がなされてもよい。
【0028】
このように、RFIDタグ100の位置は、少なくとも3つのポータブル基地局200との距離が既知となることで1点を特定することが可能になる。このように推定されたRFIDタグ100の位置は、前述のようにUWB−IRによる通信を応用して求められるものであり、したがって、数十センチ程度の非常に高い精度を有している。
【0029】
第1の実施形態において、被災地700におけるポータブル基地局200は、その位置にて通信可能なRFIDタグ100のすべてと通信を行い、RFIDタグ100ごとの通信時間、受信信号強度などをはじめとする位置算出に用いられる情報を位置パラメータ情報として測位サーバ300に送信する。具体的に、図2との対応では、ポータブル基地局200−1、200−2および200−3のそれぞれが、測位サーバ300に対して、RFIDタグ100と通信を行って得た位置パラメータ情報を送信する。
【0030】
測位サーバ300は、上記のように送信された位置パラメータ情報のうちから、同じRFIDタグ100の位置パラメータ情報を選択し、これらの選択した位置パラメータ情報を利用して、RFIDタグ100とポータブル基地局200の位置の間の距離を算出する。そして、この算出した距離に基づいて、図2により説明したようにRFIDタグ100の位置を推定する。この場合において、1つのRFIDタグ100に対応する位置パラメータ情報が3つ以上あれば、1点のRFIDタグ100の位置を推定できる。また、位置パラメータ情報が2つであれば、2点のいずれかであるとしてRFIDタグ100の位置を推定できる。さらに位置パラメータ情報が1つであれば、位置パラメータ情報を送信したポータブル基地局200を中心とする所定半径の円周上であることが推定される。
【0031】
測位サーバ300は、上記のように推定したRFIDタグ100ごとの位置をデータベースとして記憶する。例えば、捜索者は、このデータベースの内容を利用することで、被災地700における各RFIDタグ100、すなわち被災者の位置を知ることができる。捜索者は、このように被災者の位置を知るにあたり、被災地700に赴いてポータブル基地局200を設置し、これらのポータブル基地局200の位置を測位して測位サーバ300に記憶させるという作業を行えばよい。つまり、これまでのように捜索者自身が声を出すなどして移動しながら被災者を捜さなくとも、被災地700における被災者の位置を、短時間のうちに効率よく把握することができる。また、本実施形態において、ポータブル基地局200は、捜索者が災害後の被災地700に赴いて設置するものであるために、どの地域で災害が生じても使用できる。
【0032】
[RFIDタグの構成]
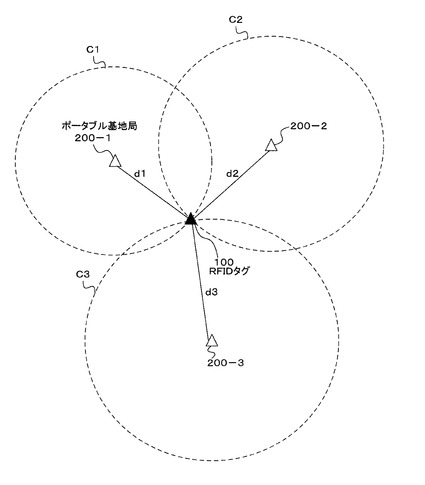
図3は、RFIDタグ100の構成例を示している。RFIDタグ100は、通信部110、制御部120、記憶部130、バッテリ140および電源回路150を備える。
【0033】
通信部110は、第1の無線通信方式(UWB−IR)によりポータブル基地局200と通信を行う部位である。この通信部110は、ベースバンド部111と送受信部112を備える。ベースバンド部111は、ベースバンド形式に対応した送受信信号処理を実行する部位である。送受信部112は、RF信号段階での送受信動作を実行する部位である。ベースバンド部111は、送信時において送信データの変調、拡散等の処理を行い、送受信部112は、ベースバンド部111から入力した送信信号をRF帯域の信号に変換してアンテナ113から電波として送出させる。また、送受信部112は、受信時において、アンテナ113にて受信された信号のフィルタリング処理や増幅などを行い、ベースバンド部111は、送受信部112から入力した信号の逆拡散や復調処理を行って受信データを得る。
【0034】
制御部120は、通信部110および記憶部130に対する制御および各種の処理を実行することにより、RFIDタグ100としての動作を実現する部位である。このような制御の1つとして、例えば制御部120は、後述する通信プロトコルに従った通信動作となるように通信部110を制御する。そして、制御部120は、通信部110によりポータブル基地局200と通信の間で通信が行われる際、次に説明する記憶部130に記憶されるタグID131をポータブル基地局200に対して送信するように制御する。なお、制御部120は、例えばCPU(Central Processing Unit)やRAM(Random Access Memory)などを備えて構成され、記憶部130に記憶されるプログラムを実行することにより、その動作が実現される。
【0035】
記憶部130は、例えば制御部120が実行するプログラムや各種データが記憶される部位である。特に、本実施形態の位置推定に対応して、記憶部130にはタグID131が記憶される。タグIDは、RFIDタグ100を一意に識別するための識別子である。なお、記憶部130に対応するハードウェアには、例えばフラッシュメモリなどの半導体記憶素子を採用することができる。
【0036】
バッテリ140は、RFIDタグ100の内部回路を駆動するための電力を供給する部位であり、前述のように、一次電池または二次電池が採用される。電源回路150は、例えばバッテリ140から供給される電力を入力して、所定値の電源電圧VddをRFIDタグ100内の回路に供給する。
【0037】
[ポータブル基地局の構成]
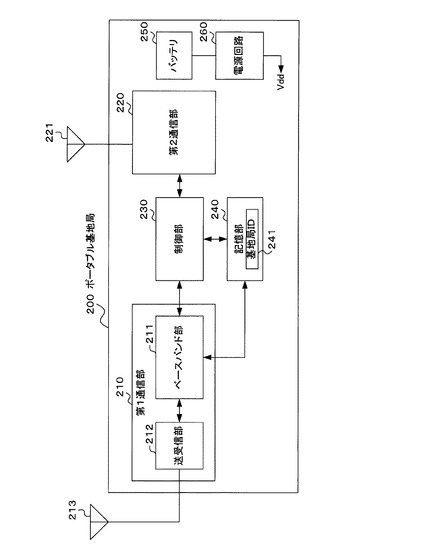
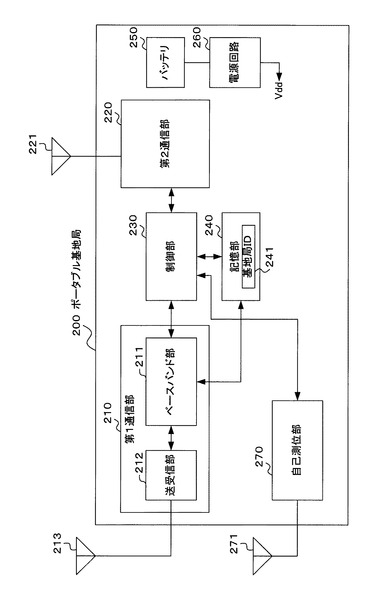
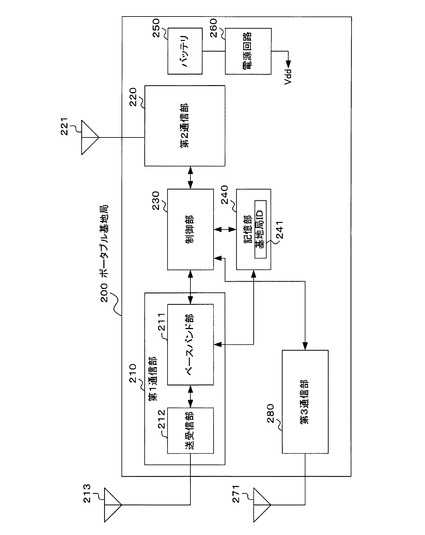
図4は、ポータブル基地局200の構成例を示している。この図に示すポータブル基地局200は、第1通信部210、第2通信部220、制御部230、記憶部240、バッテリ250および電源回路260を備える。
第1通信部210は、第1の無線通信方式により通信を行う部位であり、これにより、RFIDタグ100との通信が可能になる。この第1通信部210は、ベースバンド部211と送受信部212を備えて構成される。なお、これらベースバンド部211と送受信部212の機能および動作については、図3に示したベースバンド部111と送受信部112と同様となるので、ここでの説明は省略する。
【0038】
第2通信部220は、第2の無線通信方式により通信を行う部位である。第2通信部220は、例えば制御部230から転送された送信信号について変調を行い、アンテナ221から電波として送出する。また、第2通信部220は、アンテナ221により受信された受信信号を復調し、これにより得られたデータを制御部230に転送する。この第2通信部220によりアクセスポイント400と接続され、ネットワーク600経由で測位サーバ300と通信を行うことが可能になる。
【0039】
制御部230は、ポータブル基地局200内の各部を制御および各種処理を実行することにより、ポータブル基地局200としての動作を実現する部位である。例えば制御部230は、第1通信部210を制御して所定の通信プロトコルに従ってRFIDタグ100との通信を実行させる。そして、制御部230は、RFIDタグ100との通信により、RFIDタグ100から送信されるタグIDを受信して取得するとともに、通信時の状態に基づいて位置パラメータを生成する。そして、この位置パラメータに、上記タグIDと、後述する記憶部240に記憶される基地局ID241を対応付けた構造の位置パラメータ情報を生成し、第2通信部220により測位サーバ300に対して送信させる。なお、位置パラメータ情報の具体例については後述する。また、制御部230は、例えばCPUやRAMなどを備えて構成され、記憶部240に記憶されるプログラムを実行することにより、その動作が実現される。
【0040】
記憶部240は、制御部230におけるCPUが実行するプログラムのほか各種データを記憶する部位である。記憶部240は、記憶データの1つとして、図示するように基地局ID241を記憶している。基地局ID241は、対応のポータブル基地局200を一意に特定する識別子となる。なお、記憶部240に対応するハードウェアとしては、例えばHDD(Hard Disc Drive)、フラッシュメモリなどを採用することができる。
【0041】
バッテリ250は、RFIDタグ100の内部回路を駆動するための電力を供給する部位であり、例えばリチウムイオンバッテリなどの二次電池を採用することができる。電源回路260は、バッテリ250から供給される電力を入力して、所定値の電源電圧Vddをポータブル基地局200内の回路に供給する。
【0042】
図5は、第2通信部220から測位サーバ300に対して送信される位置パラメータ情報の構造例を示している。この図に示すように、位置パラメータ情報は、基地局ID、タグIDおよび位置パラメータから成る。基地局IDは、位置パラメータ情報の送信元のポータブル基地局200を示すものであり、記憶部240に格納された基地局ID241が格納される。タグIDは、位置パラメータを取得する際に通信していたRFIDタグ100を示すものであり、RFIDタグ100との通信時に取得したタグID131が格納される。
【0043】
位置パラメータは、格納されたタグIDのRFIDタグ100の位置推定のために測位サーバ300が利用するデータであり、ここでは、TOA(Time Of Arrival:到来時間)、TDOA(Time Difference Of Arrival:到来時間差)、RSS(Received Signal Strength:受信信号強度)、AOA(Angle Of Arrival:到来角度)となる。なお、これはあくまでも一例であり、測位サーバ300が採用する位置推定アルゴリズムに応じて適宜変更されてよい。
【0044】
[測位サーバの構成]
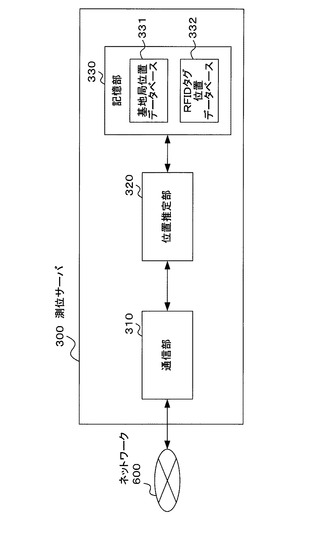
図6は、測位サーバ300の構成例を示している。この図の測位サーバ300は、通信部310、位置推定部320および記憶部330を備える。通信部310は、ネットワーク600と通信を行うための部位である。この通信部310により、ネットワーク600経由からアクセスポイント400経由で複数のポータブル基地局200と通信を行い、ポータブル基地局200から送信される位置パラメータ情報を受信することが可能になる。
【0045】
位置推定部320は、RFIDタグの位置を推定する部位である。このために、位置推定部320は、通信部310により受信された位置パラメータ情報を保持したうえで、この保持した位置パラメータ情報を利用して、RFIDタグごとの位置推定を行う。そして、このRFIDタグごとの位置推定結果を、記憶部330に対してRFIDタグ位置データベース332として記憶する。なお、この位置推定処理については後述する。
【0046】
記憶部330は、位置推定部320に関連したデータを記憶する部位であり、ここでは、基地局位置データベース331およびRFIDタグ位置データベース332を記憶することとしている。基地局位置データベース331は、位置推定部320が位置推定に利用するデータベースであり、被災地700に設置されたポータブル基地局200ごとの位置情報が格納される。また、RFIDタグ位置データベース332は、位置推定部320の位置推定結果を記録するデータベースであり、ポータブル基地局200と通信を行ったRFIDタグ100ごとの推定位置情報が格納される。
【0047】
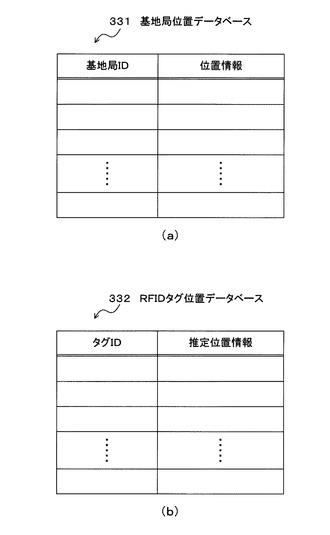
図7(a)は、基地局位置データベース331の構造例を示している。この図に示すように、基地局位置データベース331は、基地局IDごとに位置情報を対応付けた構造を有する。基地局IDは、それぞれ、被災地700に設置されたポータブル基地局200に対応しており、位置情報は、対応の基地局IDが付されたポータブル基地局200が設置された位置を示す。第1の実施形態において、この基地局位置データベース331は、前述のように、捜索者が、被災地700に設置したポータブル基地局200について測位した位置情報をその基地局IDと対応付けて入力することにより、記憶部330に記憶させる。
【0048】
図7(b)は、RFIDタグ位置データベース332の構造例を示している。この図に示すように、RFIDタグ位置データベース332は、タグIDごとに推定位置情報を対応付けた構造を有する。このRFIDタグ位置データベース332には、ポータブル基地局200から受信したすべての位置パラメータ情報に基づいて位置が推定されたすべてのRFIDタグ100ごとに対応するタグIDとの組み合わせが格納される。また、推定位置情報は、対応のタグIDが示すRFIDタグ100について推定された位置を示す。
【0049】
[RFIDタグとポータブル基地局間の通信プロトコル(第1例)]
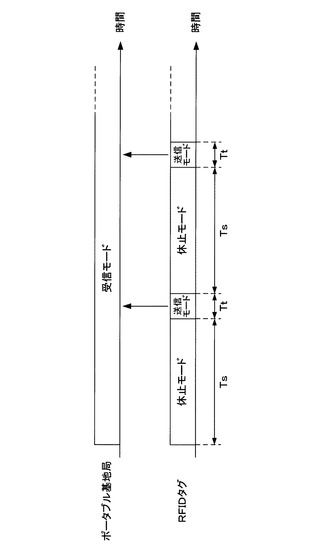
次に、図8を参照して、RFIDタグ100とポータブル基地局200間の通信プロトコル例について説明する。この通信プロトコルは、第1の無線通信方式による通信におけるRFIDタグ100とポータブル基地局200間の送受信タイミングについて規定したものとなる。
【0050】
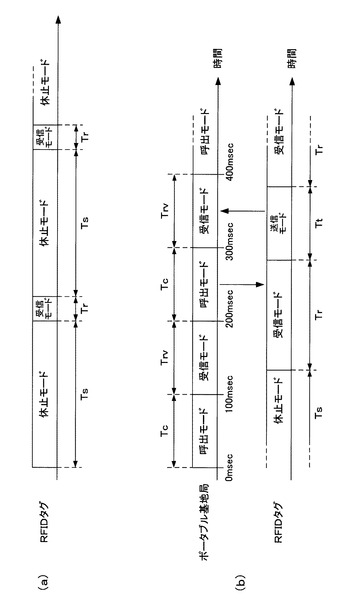
この通信プロトコルにおいて、ポータブル基地局200は、図8に示すように、継続して受信モードを設定している。一方、RFIDタグ100は、時間Tsによる休止モードと、これに続く時間Ttによる送信モードを時間経過に従って繰り返すというものになる。休止モードにおいてRFIDタグ100は、例えば通信部110や記憶部130などに対して電力供給を停止した状態(電源停止状態)として、制御部120が必要最小限の電力供給を受けている状態とする。一方、通信モードにおいては、通信部110や記憶部130に対して電力供給を行い、通信部110からタグID131を送信させる。
【0051】
そして、送信モードの時間Ttは、休止モードの時間Tsに対して相当に短い時間を設定する。一具体例として、休止モードの時間Tsを1時間程度に設定し、送信モードの時間Ttを100msec程度に設定する。本実施形態において第1の無線通信方式として採用されるUWB−IRは低消費電力であり、したがって、このように短時間の送信モードと長時間の休止モードとを組み合わせることで、バッテリ140の容量を数年以上持続させることが可能になる。
【0052】
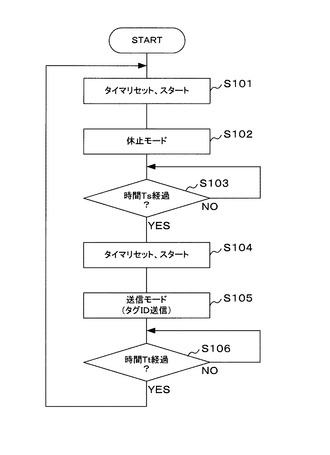
図9は、上記図8に示した通信プロトコルに対応してRFIDタグ100が実行する処理手順例を示すフローチャートである。この図に示す処理は、例えば制御部120(CPU)が実行するものとしてみることができる。
【0053】
まず、制御部120は、内部のタイマをリセットしたうえでスタートさせ、(ステップS101)、休止モードを開始させる(ステップS102)。制御部120は、例えば通信部110および記憶部130に対する電源電圧Vddの供給を停止させ、自身をスタンバイモードとすることで休止モードを設定する。そして、時間Tsが経過するのを待機し(ステップS103−NO)、時間Tsが経過すると(ステップS103−YES)、タイマを再度リセットしたうえでスタートさせる(ステップS104)。
【0054】
次に、制御部120は、これまでの休止モードから送信モードに切り替える(ステップS105)。この際、制御部120は、通信部110と記憶部130に対して電源を供給し、自身もスタンバイモードから復帰する。そして、送信モードにおいて、制御部120は、記憶部130からタグID131を読み出して、通信部110から送信させるための制御を実行する。制御部120は、送信モードに切り替えた後、時間Ttが経過するのを待機しており(ステップS106−NO)、時間Ttが経過したことを判定すると(ステップS106−YES)、ステップS101に戻る。
【0055】
[RFIDタグとポータブル基地局間の通信プロトコル(第2例)]
また、上記第1例の通信プロトコルに代えて、次の第2例としての通信プロトコルとすることも考えられる。そこで、図10を参照して、第2例としての通信プロトコルについて説明する。
【0056】
まず、図10(a)を参照して、RFIDタグ100がポータブル基地局200と通信不可の状態にある場合のRFIDタグ100の通信動作について説明する。この状態は、RFIDタグ100を所持している人の周囲にポータブル基地局200が存在しない平常時に相当する。
【0057】
RFIDタグ100は、時間Tsによる休止モードの後、時間Trによる受信モードを設定する。受信モードでは、通信部110にてポータブル基地局200から送信される呼出信号を受信可能な状態が設定される。
【0058】
そして、RFIDタグ100と通信可能なポータブル基地局200は存在しないことから、この受信モードにおいてポータブル基地局200からの呼出信号は受信されない。このように受信モードにおいてポータブル基地局200からの呼出信号を受信できなかった場合には、時間Trの経過後、再び時間Tsによる休止モードに戻り、さらにこの後、時間Trによる受信モードを設定する。このように、ポータブル基地局200との通信が行われない場合、RFIDタグ100は、休止モードとこれに続く受信モードを繰り返す。なお、一例として、休止モードの時間Tsについては1時間程度を設定し、受信モードの時間Trについては100msec程度を設定することが考えられる。
【0059】
次に、図10(b)を参照して、RFIDタグ100がポータブル基地局200と通信が可能な状態にある場合のRFIDタグ100の通信動作について説明する。この状態は、例えば災害が発生して、RFIDタグ100を所持している人の周囲にポータブル基地局200が配置された状態に相当する。
【0060】
ポータブル基地局200は、時間Tcによる呼出モードとこれに続く時間Trvによる受信モード(タグ信号受信モード)を継続して繰り返す。呼出モードの時間Tcにおいて、ポータブル基地局200の制御部230は、第1通信部210から呼出信号を送信させている。また、受信モードの時間Trvにおいて、制御部230は、第1通信部210について、呼出信号に応答してRFIDタグ100から送信されてくる信号を受信可能な状態を設定する。
【0061】
なお、この図では、一例として、時間Tcと時間Trvについて、それぞれ100msecとしている。時間Tcと時間Trvは、このように同じ時間長が設定されていてもよいし、異なる時間長が設定されてもよい。例えば、呼出モードの時間Tcについては100msec程度を設定することとしたうえで、受信モードTrvについては、例えば1秒程度とするなど、時間Tcより長い時間を設定することも考えられる。
【0062】
一方、RFIDタグ100は、図10(a)にて説明したように、時間Tsによる休止モードに続いて、時間Trによる受信モード(呼出信号受信モード)を設定して呼出信号の受信を待機する。なお、受信モードの時間Trは、例えば呼出モードの時間Tcよりも長い時間が設定される。例えば時間Tcが100msec程度であるとすると、受信モードの時間Trは、150msec〜200msec程度を設定すればよい。これにより、図示するように受信モードと呼出モードで重複する期間が存在することになり、ポータブル基地局200が送信した呼出信号が、RFIDタグ100側にて受信できることになる。
【0063】
上記のように受信モードにおいて呼出信号が受信できた場合、RFIDタグ100は、時間Trが経過すると時間Tt(例えば100msec程度)による送信モードを設定する。そして、この送信モードにより、RFIDタグ100は、呼出信号の送信元のポータブル基地局200に対してタグID131を送信する。このように送信されたタグID131は、ポータブル基地局200において呼出モードの時間Tc経過後に設定された受信モードにおいて受信される。なお、RFIDタグ100は、送信モードの時間Ttを経過した後は時間Trによる受信モードが再度設定される。このように受信モードが設定されることで、例えば直前の送信モードで送信エラーが生じていたとしても、再度、呼出信号に応答してタグIDを送信することが可能になる。また、新たに他のポータブル基地局200から呼出信号が送信された場合にも、これに応答してタグIDを送信することが可能になる。
【0064】
このような通信プロトコルの場合、周囲にポータブル基地局200が配置されていない平常時の状況では、RFIDタグ100は、例えば一時間に一回程度の頻度で100msec程度の期間により受信モードが設定されて起動するが、これ以外の期間は休止状態であることから、バッテリ140の寿命を長く保たせることが可能になる。また、この第2例の通信プロトコルでは、ポータブル基地局200からの呼出信号が受信されない限り、送信モードが設定されないようになっているため、平常時において送信モードによりタグIDが送信されることがない。これにより、平常時においてタグIDが傍受されることもなくなるため、セキュリティを確保することができる。
【0065】
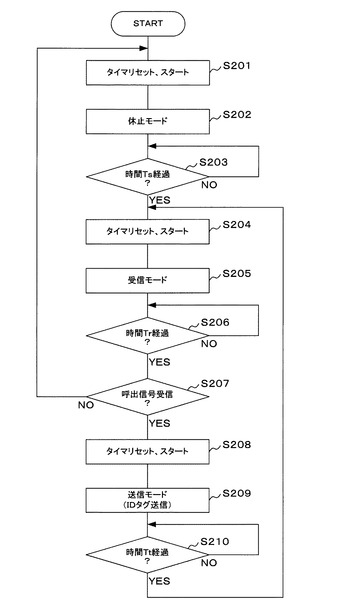
図11は、上記図10に示した第2例の通信プロトコルに対応してRFIDタグ100が実行する処理手順例を示している。この図に示す処理も、制御部120(CPU)が実行するものとしてみることができる。
【0066】
制御部120は、内部のタイマをリセットしたうえでスタートさせ(ステップS201)、休止モードを設定する(ステップS202)、時間Tsが経過するのを待機している(ステップS203−NO)。そして、時間Tsが経過すると(ステップS203−YES)、再度、タイマをリセットしたうえでスタートさせ(ステップS204)、受信モードを設定する(ステップS205)。つまり、制御部120は、スタンバイモードから復帰し、通信部110と記憶部130に対して電源供給を再開するとともに、通信部110についてポータブル基地局200からの呼出信号を受信可能な状態に設定する。
【0067】
制御部120は、上記の状態のもとで、時間Trが経過するのを待機しており(ステップS206−NO)、時間Trが経過すると(ステップS206−YES)、今回設定した受信モードの期間内において呼出信号が受信されたか否かについて判定する(ステップS207)。
【0068】
上記呼出信号が受信されなかったと判定した場合(ステップS207−NO)、制御部120はステップS201に戻る。これに対して呼出信号が受信されたと判定した場合(ステップS207−YES)、制御部120は、タイマのリセット、スタートを行ったうえで(ステップS208)、送信モードを設定する(ステップS209)。送信モードにおいて、制御部120は、記憶部130からタグID131を読み出し、通信部110により、このタグID131を呼出信号の送信元のポータブル基地局200に対して送信する。そして、制御部120は、送信モードを開始させた状態のもとで、時間Ttが経過するのを待機しており(ステップS210−NO)、時間Ttが経過すると(ステップS210−YES)ステップS204に戻り、受信モードを再開させる。
【0069】
[ポータブル基地局の処理手順例]
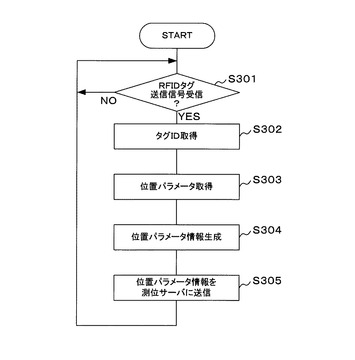
次に、図12のフローチャートを参照して、第1の実施形態におけるポータブル基地局200が実行するタグIDの受信および位置パラメータ情報送信のための処理手順例について説明する。なお、この図に示す処理は、制御部230が実行するものとしてみることができる。
【0070】
制御部230は、先に図8または図10により説明した受信モードにおいて、RFIDタグ100からの送信信号が受信されるのを待機している(ステップS301−NO)。そして、RFIDタグ100からの送信信号が受信されたことを判定すると(ステップS301−YES)、例えば第1通信部210によりその受信信号の復調処理等を実行させて、その受信信号に含まれているタグIDを取得する(ステップS302)。
【0071】
また、制御部230は、今回のRFIDタグ100との通信時において第1通信部210により検出させたTOA、TDOA、RSS、AOAの各値を位置パラメータとして取得する(ステップS303)。
【0072】
次に、制御部230は、ステップS302により取得したタグIDと、記憶部240から読み出した基地局IDと、ステップS303により取得した位置パラメータにより、位置パラメータ情報(図5参照)を生成する(ステップS304)。そして、制御部230は、この位置パラメータ情報を、第2通信部220から測位サーバ300に対して送信させる(ステップS305)。このように、ポータブル基地局200は、通信可能な1つ以上のRFIDタグと通信を行い、この通信を行ったRFIDタグ100ごとに、位置推定に利用する情報(位置パラメータ情報)を測位サーバ300に送信するものである。
【0073】
[測位サーバの処理手順例]
次に、図13のフローチャートを参照して、測位サーバ300の位置推定部320が実行する位置推定のための処理手順例について説明する。なお、この図に示されている処理が実行される段階では、例えば、被災地700に設置されたすべてのポータブル基地局200から送信された位置パラメータ情報を保持している場合を想定する。
【0074】
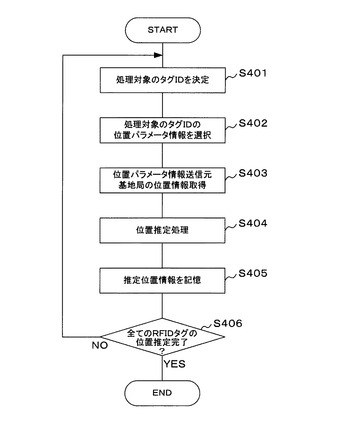
位置推定部320は、例えば自身が保持している位置パラメータ情報に格納されているタグIDのうちから、1つのタグIDを位置推定の処理対象として決定する(ステップS401)。そして、自身が保持している位置パラメータ情報のうちから、上記処理対象として決定されたタグIDを格納するすべての位置パラメータ情報を選択する(ステップS402)。このように選択される位置パラメータ情報の数は、処理対象のタグIDに対応するRFIDタグ100と通信を行ってタグID131を受信することのできたポータブル基地局200の数に対応する。
【0075】
次に、位置推定部320は、上記ステップS402により選択した位置パラメータ情報の送信元であるポータブル基地局200ごとの位置情報を取得する(ステップS403)。このために、位置推定部320は、ステップS402により選択された位置パラメータ情報の各々に格納されている基地局IDごとに対応する位置情報を、記憶部330の基地局位置データベース331から検索して取得する。これにより、RFIDタグ100の位置推定のために必要なポータブル基地局200の位置が既知となる。
【0076】
次に位置推定部320は、位置推定処理を実行する(ステップS404)。この際、位置推定部320は、位置パラメータ情報における位置パラメータ(TOA、RSSおよびAOA)を用いて、その位置パラメータ情報送信元のポータブル基地局200の位置から処理対象のRFIDタグ100までの距離を算出する。そして、このようにして得られた距離の情報を利用して、例えば図2により説明した手法に基づいてRFIDタグ100の位置を推定する。なお、このような位置推定にあっては、上記TOA、RSSおよびAOAに加えて、TDOA(Time Difference Of Arrival:到来時間差)を利用する手法も知られているが、このTDOAは、ステップS402により複数の位置パラメータ情報が選択された場合に、これらの位置パラメータ情報において格納されるTOAを利用して求めることも可能である。
【0077】
そして、位置推定部320は、上記ステップS404によって推定された位置情報(推定位置情報)を、ステップS401により選択したタグIDに対応付けて、RFIDタグ位置データベース332に対して新規登録するように記憶させる(ステップS405)。
【0078】
次に位置推定部320は、自己が保持するすべての位置パラメータ情報が格納するタグIDに対応するすべてのRFIDタグ100についての位置推定が完了したか否かについて判定する(ステップS406)。ここで、まだ位置推定されていないRFIDタグ100が残っている場合(ステップS406−NO)、位置推定部320は、ステップS401に戻り、次の処理対象のタグIDを決定したうえで、以降の位置推定のための処理を実行する。そして、すべてのRFIDタグ100の位置推定が完了したことを判定すると(ステップS406−YES)、位置推定部320は、これまでの処理を終了させる。この図に示す処理が終了した段階では、RFIDタグ位置データベース332の内容として、被災地700に設置されたポータブル基地局200と通信を行ったすべてのRFIDタグ100についての位置情報が得られていることになる。
【0079】
<第2の実施形態>
[ポータブル基地局の構成例]
続いて、第2の実施形態について説明する。図14は、第2の実施形態におけるポータブル基地局200の構成例を示している。なお、この図において、図4と同一部分には同一符号を付して説明を省略する。また、第2の実施形態に対応する被災者救助支援システムの全体構成は、図1と同様でよい。
【0080】
図14におけるポータブル基地局200は、図4に示した構成に対して自己測位部270が付加された構成となっている。自己測位部270は、自己の位置を測定する部位である。この自己測位部270により測定された自己の位置情報は、制御部230の制御によって、記憶部240に記憶される基地局ID241と対応付けられたうえで、第2通信部220から測位サーバ300に対して送信される。
【0081】
測位サーバ300は、受信したポータブル基地局200の基地局ID241と位置情報とを対応付けて、記憶部330の基地局位置データベース331に対して新規登録するように記憶させる。
【0082】
このように、第2の実施形態では、ポータブル基地局200の各々が自己の位置を測定して測位サーバ300に送信し、測位サーバ300は、この送信された位置の情報を記憶するように構成されている。つまり、第2の実施形態において、測位サーバ300は、ポータブル基地局200からその位置情報を収集して基地局位置データベース331を構築することができる。これにより、捜索者は、設置したポータブル基地局200ごとの位置を測定し、その測定した情報を測位サーバ300に入力するという作業を行う必要がなくなり、さらに効率のよい被災者救助作業が行えることになる。
【0083】
[自己測位部の具体例]
自己測位部270の具体例として、1つには、GPSに対応した測位デバイスを採用することが考えられる。
【0084】
また、1つには、自己測位部270に第1の無線通信方式に対応する通信機能を与えたうえで、以下に説明するようにポータブル基地局200の各々が自己位置を測定させるように構成することが考えられる。なお、図2においては、3つ以上の基地局(すなわち既知の座標)とRFIDタグ100との距離が既知とされることによってRFIDタグ100の位置が一点で求められるものと説明したが、1つの既知の座標(基地局)に基づいて位置を推定する技術も知られている。そこで、以下においては、説明を簡単なものとするために、1つの既知の座標(基地局)に基づいて位置を推定することを前提とする。
【0085】
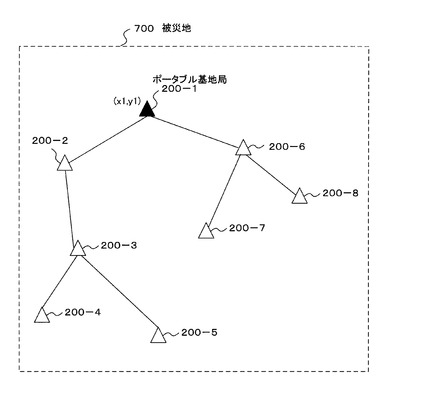
図15は、被災地において配置される8個のポータブル基地局200(200−1〜200−8)を模式的に示している。これらポータブル基地局200−1〜200−8のうち、ポータブル基地局200−1については、その配置された位置の座標(x1,y1)が測定されており、その位置を示すデータが記憶部240に記憶されているものとする。
【0086】
なお、ポータブル基地局200−1については、GPSに対応した測位デバイスを設けることで、その位置を取得することができる。また、例えば捜索者がポータブル基地局200−1の設置時に測位を行って、その絶対位置の座標を入力して記憶させることとしてもよい。このように記憶された座標は、被災地700における基準位置として設定される。
【0087】
ここで、ポータブル基地局200−1に対して、ポータブル基地局200−2およびポータブル基地局200−6が通信可能であるとする。すると、ポータブル基地局200−2およびポータブル基地局200−6は、それぞれ、ポータブル基地局200−1から受信した位置を基準座標とすることで、自己の位置(座標)を求めることができる。
【0088】
次に、ポータブル基地局200−2に対しては、ポータブル基地局200−3が通信可能とされている。これにより、ポータブル基地局200−3は、ポータブル基地局200−2から受信したポータブル基地局200−2の位置情報を基準座標として自己の位置を求めることができる。以降は、同様に、ポータブル基地局200−4および200−5の各々は、ポータブル基地局200−3から受信した位置情報を基準座標として自己の位置を求める。また、ポータブル基地局200−7および200−8も、それぞれ、ポータブル基地局200−6から受信した位置情報を基準座標として自己の位置を求める。
【0089】
このように、例えばポータブル基地局200−1を基点とするポータブル基地局200間の通信により求められる距離の情報を共有することによって、ポータブル基地局200ごとの位置を連鎖的に求めていくことが可能である。
【0090】
そして、上記の手法では、第1の無線通信方式を利用して位置を求めている。前述のように、第1の無線通信方式による位置推定は、例えばGPSよりも高い精度を有するものであり、したがって、この手法であれば、非常に高い精度のポータブル基地局200の位置情報を自動的に得ることが可能になる。
【0091】
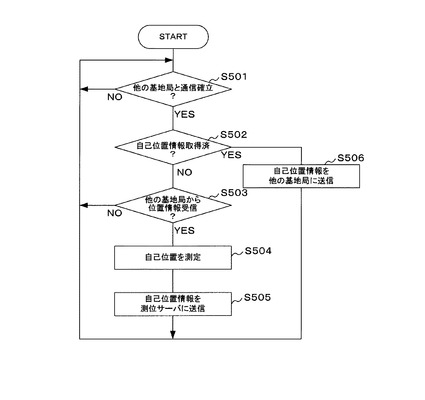
図16のフローチャートは、上記図15により説明した手法に対応した自己測位のための処理手順例を示している。この図に示す処理は、図14における自己測位部270が実行するものとする。また、この場合の自己測位部270は、例えば制御部230と同様に、CPUがプログラムを実行することにより実現される機能としてみることができる。
【0092】
自己測位部270は、他の1つのポータブル基地局200との通信が確立されるのを待機しており(ステップS501−NO)、通信が確立されると(ステップS501−YES)、既に自己の位置情報を取得済みであるか否かについて判定する(ステップS502)。ここで、自己の位置情報を取得済みであると判定した場合(ステップS502−YES)、自己測位部270は、自己の位置情報を、通信が確立されている他のポータブル基地局200に送信する(ステップS506)。
【0093】
一方、自己の位置情報が取得済みではないと判定した場合(ステップS502−NO)、自己測位部270は、通信が確立されている他のポータブル基地局200から位置情報が受信されたか否かについて判定する(ステップS503)。他のポータブル基地局200は、自己の位置情報を取得済みであれば、その位置情報を送信してくるが、取得済みでなければ送信を行わない。
【0094】
他のポータブル基地局200からの位置情報が受信されなかったと判定した場合(ステップS503−NO)、自己測位部270はステップS501に戻り、これまでとは異なる他のポータブル基地局200との通信が確立されるのを待機する。これに対して、位置情報が受信されたと判定した場合(ステップS503−YES)、自己測位部270は、受信した位置情報を基準として自己の位置を測定する(ステップS504)。そして、測定された位置情報を測位サーバ300に送信する(ステップS505)。
【0095】
なお、上記図15および図16により説明した自己測位のための手法にあっては、自己測位部270における第1の無線通信方式に対応する通信機能を、第1通信部210を共用することにより実現することが可能である。これにより、RFIDタグ100との通信および他のポータブル基地局200との通信に利用する通信部が共通化されることとなり、例えばハードウェア資源およびソフトウェア資源を削減することが可能になる。
【0096】
<第3の実施形態>
図17は、第3の実施形態としての被災者救助支援システムの構成例を示している。この図において、図1と同一部分は同一符号を付して説明を省略する。この第3の実施形態の被災者救助支援システムは、第1の実施形態の構成に対して、携帯端末装置500が追加される。
【0097】
携帯端末装置500は、被災地700の現場において捜索者が所持する。そして、携帯端末装置500は、測位サーバ300から受信したRFIDタグ位置データベース332のデータに基づいて、例えば画像表示によって被災地700の地域におけるRFIDタグ100の位置を提示する。このために、携帯端末装置500は、測位サーバ300とアクセスポイント400経由で通信するための第2の無線通信方式に対応する通信機能と、表示機能を備える。また、携帯端末装置500は、捜索者が携帯可能なようにサイズや形状が設定されており、また、例えば二次電池などのバッテリを内蔵し、このバッテリを電源として動作可能なように構成されている。
【0098】
被災地700の現場にいる捜索者は、携帯端末装置500にRFIDタグ100の位置を表示させることにより、自分の周囲に存在しているRFIDタグ100の位置を把握することができる。そして、このRFIDタグ100の位置へとすぐに赴くことで、被災者を迅速に発見することができる。
【0099】
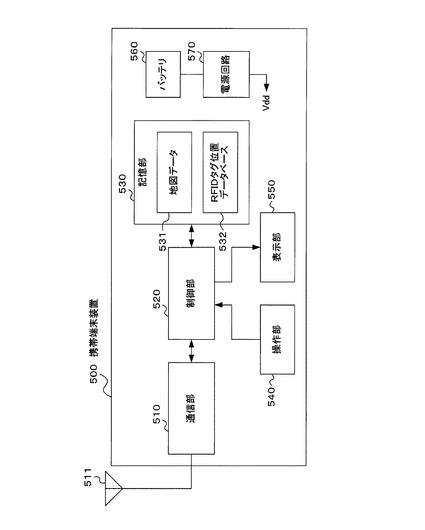
図18は、携帯端末装置500の構成例を示している。この図に示す携帯端末装置500は、通信部510、制御部520、記憶部530、操作部540、表示部550、バッテリ560および電源回路570を備える。
【0100】
通信部510は、第2の無線通信方式に対応して通信を行う部位であり、例えばポータブル基地局200の第2通信部220と同様の構成を採る。これにより、携帯端末装置500は、アクセスポイント400と接続して、ネットワーク600経由で測位サーバ300と通信することが可能となる。
【0101】
制御部520は、例えばCPUおよびRAMなどを備えて構成され、各種の制御および処理を実行することにより、携帯端末装置500としての動作を実現する部位である。
【0102】
記憶部530は、制御部520におけるCPUが実行するプログラムのほか、各種必要なデータを記憶する。この図では、記憶部530に記憶されるデータのうち、RFIDタグ100の位置表示に対応して利用されるデータとして、地図データ531およびRFIDタグ位置データベース532が示される。
【0103】
地図データ531は、少なくとも被災地700の地域を含む地図データである。また、RFIDタグ位置データベース532は、被災地700に存在するRFIDタグ100ごとの位置を示すデータである。このRFIDタグ位置データベース532は、携帯端末装置500が測位サーバ300から受信したRFIDタグ位置データベース332を記憶部530に記憶させたものである。
【0104】
操作部540は、携帯端末装置500に対して備えられる各種の操作子を一括して示したものである。なお、例えば表示部550がタッチパネルとして構成される場合には、このタッチパネルのセンサも操作部540に含められることになる。この操作部540における操作子は、操作が行われるのに応じて操作信号を制御部520に対して出力する。制御部520は、入力した操作信号に応じて所定の処理を実行する。これにより、操作に応じた携帯端末装置500の動作が実現される。
【0105】
表示部550は、例えば液晶ディスプレイデバイスなどとされ、制御部520の制御に応じて画像を表示する部位である。
【0106】
バッテリ560は、携帯端末装置500の電源となるもので、例えば二次電池などとされる。電源回路570は、バッテリ560から供給される電力を受けて所定値の電源電圧Vddとして内部回路に出力する。
【0107】
上記構成による携帯端末装置500によるRFIDタグ100の位置表示のための動作例について説明する。捜索者は、例えば、RFIDタグ位置データベース332のダウンロードを指示するための操作を操作部540に対して行う。この操作に応じて制御部520には、通信部510により、測位サーバ300に対してRFIDタグ位置データベース332のダウンロード要求を送信する。この要求に応じて送信されてきたRFIDタグ位置データベース332が通信部510にて受信されると、制御部520は、受信したRFIDタグ位置データベース332を記憶部530に転送し、RFIDタグ位置データベース532として記憶させる。このように、携帯端末装置500は、通信によって測位サーバ300から被災地700に存在するRFIDタグ100の位置を示す情報を取得する。
【0108】
このようにRFIDタグ位置データベース532を記憶する携帯端末装置500の操作部540に対して、捜索者は、RFIDタグ100の位置の表示を指示するための操作を行う。この操作に応じて制御部520は、記憶部530において記憶される地図データ531を読み出して表示部550に地図画像として表示させる。また、これとともに、RFIDタグ位置データベース532を読み出して、このRFIDタグ位置データベースにより示されるRFIDタグ100の位置を、表示された地図データの位置と対応させて重畳表示させる。これにより、表示部550には、地図上にRFIDタグ100の存在する位置が示されるように画像の表示が行われる。捜索者は、この画像を見ることにより、自分の近辺におけるRFIDタグ100の位置を知ることができる。このように、捜索者は、携帯端末装置500を所持することにより、測位サーバ300からRFIDタグ100の位置情報を即座に取得してその位置を知ることができる。これにより、捜索作業を、さらに迅速かつ効率的に行うことが可能になる。
【0109】
なお、図示は省略しているが、携帯端末装置500に対してGPSに対応した測位機能を与えるなどして自己の位置を測位できるようにして、表示部550に表示される地図上に対して、RFIDタグ100の位置とともに、自己の位置を表示させるようにしてもよい。これにより、捜索者は、自己の位置と周囲のRFIDタグ100との位置関係を容易に把握することが可能となり、さらに効率的に捜索作業を行うことが可能になる。
【0110】
<第4の実施形態>
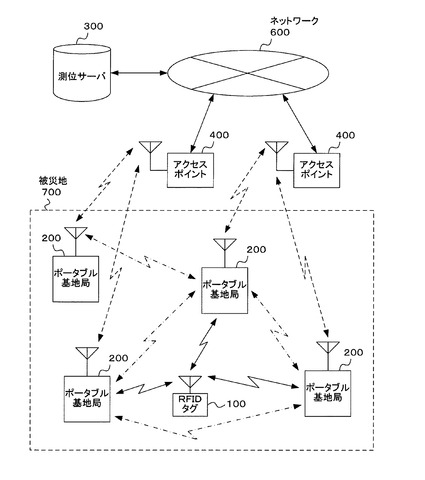
図19は、第4の実施形態における被災者救助支援システムの構成例をしている。なお、この図において、図1と同一部分には同一符号を付して説明を省略する。この第4の実施形態における被災者救助支援システムが備える装置としては、第1の実施の形態と同様である。そのうえで、第4の実施形態においては、ポータブル基地局200間で所定の無線通信方式による通信を行うように構成される。
【0111】
そして、この第4の実施形態においては、このポータブル基地局200間の通信により、1つのポータブル基地局200がRFIDタグ100と通信することにより生成した位置情報パラメータ(図5)を、他のポータブル基地局200にも送信する。そして、ポータブル基地局200の各々は、自己が生成した位置パラメータ情報の送信だけではなく、他のポータブル基地局200から受信した位置パラメータ情報も測位サーバ300に対して送信する。
【0112】
なお、上記のような動作をポータブル基地局200が一斉に行っている状態では、多数の同一の位置パラメータ情報がループするようにしてポータブル基地局200間で送受信され、これが輻輳などの原因となる。また、測位サーバ300に対しても多数の同一の位置情報パラメータ情報が同時に送信されることとなり、同じく輻輳やトラフィックの著しい増加を招く可能性がある。そこで、例えばポータブル基地局200において過去に一度受信した位置パラメータ情報は送信しないようにして、輻輳を回避できるように構成することが好ましい。
【0113】
被災地700の現場では、必ずしもすべてのポータブル基地局200がアクセスポイント400と通信が可能であるとは限らず、一部のポータブル基地局200がアクセスポイント400と通信が行えない状態となる場合が想定される。この原因として、1つにはアクセスポイント400とポータブル基地局200間の距離や障害物などの影響で電波が到達しない状態を挙げることができる。また、何らかの要因で干渉やフェージングなどの電波障害が生じる状態を挙げることができる。
【0114】
そこで、第4の実施形態では、前述のように、ポータブル基地局200間で位置パラメータ情報を授受するように通信を行い、受信した位置パラメータ情報を測位サーバ300に送信させるようにする。これにより、アクセスポイント400と直接通信を行えない状態のポータブル基地局200が生成した位置パラメータ情報も、他のポータブル基地局200によって測位サーバ300に送信される。この結果、測位サーバ300は、被災地700に設置されたすべてのポータブル基地局200により生成された位置パラメータ情報を収集することができる。このように、第4の実施形態は、ポータブル基地局200とアクセスポイント400間の通信に関してロバストな被災者救助支援システムを構築することが可能になる。
【0115】
図20は、第4の実施形態におけるポータブル基地局200の構成例を示している。なお、この図において、図4と同一部分には同一符号を付して説明を省略する。この図に示すポータブル基地局200は、図4の構成に対して第3通信部280をさらに備えて構成される。
【0116】
第3通信部280は、所定の第3の無線通信方式により他のポータブル基地局200との通信を実行する部位である。第3通信部280は、制御部230の制御に応じて、送信データについて無線通信方式に対応した変調処理や増幅などを施してアンテナ271より電波として送出させる。また、第3通信部280は、アンテナ271にて受信した他のポータブル基地局200からの信号を入力して増幅や復調処理などを施して受信データを得る。
【0117】
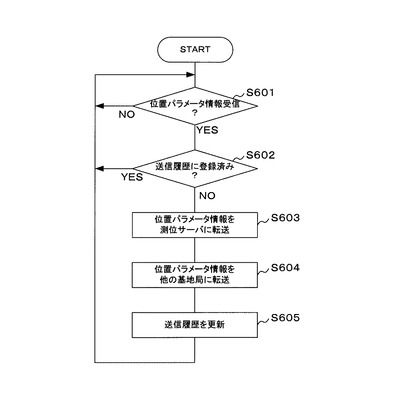
図21は、第3の実施の形態に対応してポータブル基地局200が実行する位置パラメータ情報の送受信に関する処理手順例を示している。この図に示す処理は制御部230が実行するものとしてみることができる。
【0118】
制御部230は、他のポータブル基地局200からの位置パラメータ情報が第3通信部280にて受信されるのを待機している(ステップS601−NO)。そして、位置パラメータ情報が受信されると(ステップS601−YES)、この受信した位置パラメータ情報が送信履歴に登録されているか否かについて判定する(ステップS602)。
【0119】
なお、送信履歴は、当該ポータブル基地局200が既に一度受信して測位サーバ300および他のポータブル基地局200に対して送信した位置情報パラメータ情報を示す情報であり、制御部230の内部のRAMに保持される。また、図示は省略するが、送信履歴の構造としては、いくつか考えることができる。1つには、これまでに送信した位置パラメータ情報のデータを格納した構造とすることが考えられる。また、位置パラメータ情報の同一性は、格納される基地局IDとタグIDの組み合わせによって一意に特定できるので、これまでに送信した位置パラメータ情報の基地局IDとタグIDの組み合わせを格納した構造とすることが考えられる。
【0120】
そして、制御部230は、受信した位置パラメータ情報が送信履歴に登録済みである場合には(ステップS602−YES)、この受信した位置パラメータ情報を送信することなく廃棄してステップS601に戻る。一方、送信履歴に登録済みでない場合(ステップS602−NO)、制御部230は、受信した位置パラメータ情報を第2通信部220から測位サーバ300に対して送信させる(ステップS603)。また、第3通信部280により例えばブロードキャストによって他のポータブル基地局200に対して送信させる(ステップS604)。そして、制御部230は、上記ステップS603およびS604により送信した位置パラメータ情報を新規登録するように送信履歴の更新を実行する(ステップS605)。
【0121】
第4の実施形態において、第3通信部280に採用される第3の無線通信方式としてはIEEE802.11a/b/g/n等の無線LANを挙げることができる。また、GSM(登録商標)、W−CDMA(登録商標)、CDMA2000(登録商標)、LTE等のセルラーネットワークや、モバイルWiMAX(登録商標)、IEEE802.20等のMAN(Metropolitan Area Network)などを採用することも考えられる。また、第1の通信方式を採用することも考えられる。
【0122】
そのうえで、第3通信部280が対応する第3の無線通信方式と、第2通信部220が対応する第2の無線通信方式とが同じであってもよい。このように第3の無線通信方式と第2の無線通信方式が同じである場合、第3通信部280を省略して、第2通信部220をアクセスポイント400との通信と他のポータブル基地局200との通信とで共用するように構成することができる。このように第2通信部220を共用することで、アクセスポイント400との通信と他のポータブル基地局200との通信を実行するにあたり、ハードウェアやリソースを削減することが可能となる。
【0123】
また、第3通信部280が対応する第3の無線通信方式について、第1通信部220が対応する第1の無線通信方式とを同じとすることもできる。このように第3の無線通信方式と第1の無線通信方式が同じである場合にも、第3通信部280を省略して、第1通信部210をRFIDタグ100との通信と他のポータブル基地局200との通信とで共用するように構成することができる。この場合にも、ハードウェアやリソースの削減が図られる。
【0124】
<第5の実施形態>
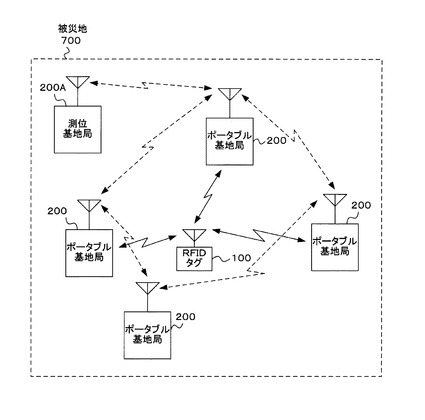
図22は、第5の実施形態としての被災者救助支援システムの構成例を示している。なお、この図において図1と同一部分には同一符号を付して説明を省略する。この第5の実施形態としての被災者救助支援システムでは測位サーバ300が省略される。また、これに伴って、測位サーバ300とポータブル基地局200とをネットワーク600経由で接続するためのアクセスポイント400もシステム構成から省略される。つまり、第5の実施形態における被災者救助支援システムは、被災地700において設置されるポータブル基地局200と、被災地700に存在するRFIDタグ100から成る。
【0125】
そのうえで、被災地700におけるポータブル基地局200のうち、少なくとも1つは測位サーバ300に相当する測位機能が与えられた測位基地局200Aが設置される。測位基地局200Aは、ポータブル基地局200の構成にRFIDの測位機能を付加して構成したものである。
【0126】
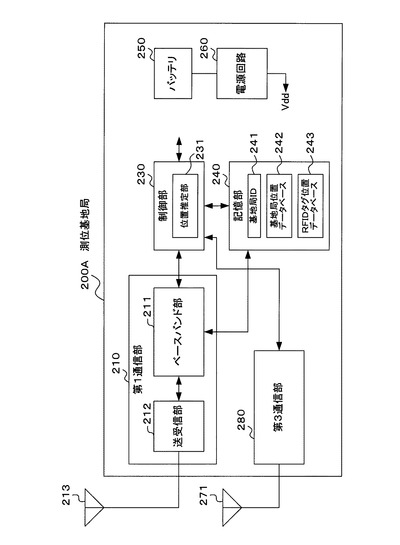
図23は、測位基地局200Aの構成例を示している。なお、この図において、図20のポータブル基地局200と同一部分には同一符号を付して説明を省略する。この図に示す測位基地局200Aは、例えば図20のポータブル基地局200において備えられていた第2通信部220が省略されている。なお、図23における第3通信部280は、特許請求の範囲に記載の測位通信部に相当する。また、制御部230は、例えば自身の処理機能として位置推定部231を備える。この位置推定部231は、第3通信部280により受信した位置パラメータ情報に基づいてRFIDタグ100の位置推定を行う部位であり、その動作は、図6の測位サーバ300の位置推定部320と同様となる。また、位置推定部320を備えることに対応して、記憶部240には、基地局位置データベース242およびRFIDタグ位置データベース243が記憶される。これら基地局位置データベース242およびRFIDタグ位置データベース243は、図7に示した基地局位置データベース331およびRFIDタグ位置データベース332と同様の構造を有する。
【0127】
また、第5の実施形態におけるポータブル基地局200は、図示は省略するが、先の図20に示す構成から第2通信部220を省略した構成とされてよい。第5の実施形態において、ポータブル基地局200は、第3通信部280により他のポータブル基地局200または測位基地局200Aと通信を行う。これにより、ポータブル基地局200および測位基地局200A間で通信網が形成される。そして、ポータブル基地局200は、自己が生成した位置パラメータ情報または他のポータブル基地局200から受信した位置パラメータ情報を、測位基地局200Aを送信先として上記通信網を経由して送信する。
【0128】
上記構成において、RFIDタグ100と通信可能なポータブル基地局200は、通信相手のRFIDタグ100に対応する位置パラメータ情報を生成し、測位基地局200Aに送信する。
【0129】
この際、位置パラメータ情報送信元のポータブル基地局200と測位基地局200Aとの距離が通信可能範囲外であるなどの理由で直接通信できない場合には、他の1つ以上のポータブル基地局200を順次中継して測位基地局200Aに到達させるようにすればよい。なお、このためには、第3通信部280にルーティング機能を与えることとすればよい。
【0130】
上記の通信により、測位基地局200Aにおいては、第3通信部280により位置パラメータ情報が受信される。位置推定部320はこのように受信される位置パラメータ情報を収集し、RFIDタグ100ごとの位置を推定し、その推定結果をRFIDタグ位置データベース243として記憶させる。
【0131】
なお、測位基地局200Aの記憶部240において記憶される基地局位置データベース242は、第1の実施形態と同様に、捜索者がポータブル基地局200ごとに測定した位置を入力することで記憶させることができる。
【0132】
または、第2の実施形態と同様に、ポータブル基地局200に自己測位部270を備え、ポータブル基地局200の各々が自己測位部270により自己位置を測定する。そのうえで、ポータブル基地局200間で形成される通信網を介して、測定した自己の位置情報を、基地局IDとともに測位基地局200Aに対して送信する。そして、測位基地局200Aが、受信した位置情報と基地局IDにより基地局位置データベース242を構築して記憶部240に記憶させるようにしてもよい。このような被災者救助支援システムの構成であれば測位サーバ300が不要となるので、システム構成がより簡易で扱いやすくなる。
【0133】
また、この第5の実施の形態においては、第3の実施の形態に準じて、被災者救助支援システムに携帯端末装置500を追加して備えることができる。この場合の携帯端末装置500の通信部510は、ポータブル基地局200との通信が可能なように、第3の無線通信方式に対応する構成を採る。
【0134】
そのうえで、ポータブル基地局200間の通信網を利用して、測位基地局200Aが記憶するRFIDタグ位置データベース243を、ポータブル基地局200の各々にも伝送して記憶させる。つまり、ポータブル基地局200間でRFIDタグ位置データベース243を共有する。
【0135】
このためには、測位基地局200Aの第3通信部280からブロードキャストでRFIDタグ位置データベース243を送信させる。そして、このRFIDタグ位置データベース243を受信したポータブル基地局200は、受信したRFIDタグ位置データベース243を記憶部240に記憶するとともに、他のポータブル基地局200に対して第3通信部280からブロードキャストで送信する。これにより、被災地700におけるポータブル基地局200の各々が同一内容のRFIDタグ位置データベース243を共有することができる。
【0136】
そして、携帯端末装置500は、通信可能なポータブル基地局200からRFIDタグ位置データベース243を受信し、記憶部530にRFIDタグ位置データベース532として記憶させる。以降、携帯端末装置500は、このRFIDタグ位置データベース532に基づいてRFIDタグ100の位置を表示部550に表示させることができる。
【0137】
先の第4の実施形態においても説明したように、第3通信部280によるポータブル基地局200間の無線通信方式には、第1の無線通信方式を採用することも可能であり、また、この場合には、第3通信部280と第1通信部210を共通化した構成とすることができる。
【0138】
第1の無線通信方式は低消費電力であり、また、第1の無線通信方式を採用すれば、第5の実施形態においても、図15および図16に準じてポータブル基地局200ごとの絶対位置座標を算出することが可能となるという利点がある。ただし、第1の無線通信方式は、例えば輻輳制御やコリジョン制御が行われないことから、RFIDタグ100との通信も同時に行われている場合には、ポータブル基地局200間の通信がRFIDタグ100との通信の障害になる場合がある。このようにRFIDタグ100との通信が良好でなくなくなるような状況では、ポータブル基地局200間の通信は、無線LANをはじめとして、第1の無線通信方式以外の方式による通信を行ったほうがよいことになる。
【0139】
このような観点からすると、現在の動作モードや通信状況などに応じて、ポータブル基地局200間の通信に際して、無線通信方式を第1の無線通信方式と、これ以外の所定の無線通信方式との間で動的に切り替えるように構成することが考えられる。以降、このための構成について説明する。このように無線通信方式を切り替える場合、ポータブル基地局200の第3通信部280は、第1の無線通信方式とこれ以外の所定の無線通信方式とで切り替え可能なように構成することになるが、第1の無線通信方式については第1通信部210を利用できる。そこで、以降の説明においてポータブル基地局200が第1の無線通信方式により通信を行う場合には、第1通信部210を利用することとする。そのうえで、第3通信部280の通信方式には無線LANを採用することとする。また、ポータブル基地局200は、図14の自己測位部270を備える。この自己測位部270は、第1通信部210による他のポータブル基地局200との通信を利用して、図15および図16の手法により自己の絶対値座標を算出する。
【0140】
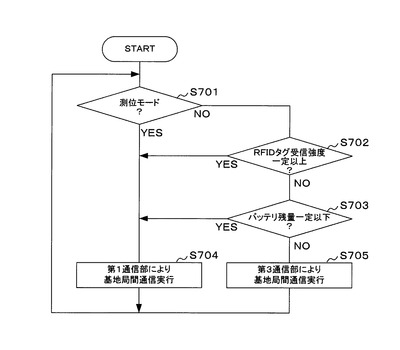
図24のフローチャートは、ポータブル基地局200が実行する、ポータブル基地局200間通信における通信方式切り替えのための処理手順例を示している。この図に示す処理は、制御部230が実行するものとしてみることができる。
【0141】
制御部230は、現在において自己の絶対値座標を求める測位モード中であるか否かについて判定する(ステップS701)。そして、測位モード中である場合(ステップS701−YES)、制御部230は、第1通信部210(第1の無線通信方式)により他のポータブル基地局200との通信を実行させる(ステップS704)。
【0142】
これに対して、測位モード中でない場合(ステップS701−NO)、制御部230は、現在において第1通信部210により受信されるRFIDタグ100の受信信号強度が一定以上であるか否かについて判定する(ステップS702)。ここで、受信信号強度が一定以上である場合(ステップS702―YES)、制御部230は、ステップS704に進む。一方、受信信号強度が一定未満である場合(ステップS702−NO)、制御部230は、さらにバッテリ250の残量が一定以下であるか否かについて判定する(ステップS703)。
【0143】
バッテリ250の残量が一定以下であると判定した場合(ステップS703−YES)、制御部230はステップS704に進む。つまり、消費電力が少ない第1の無線通信方式に切り替えることで、バッテリ250の残量をより長時間持続させるようにする。これに対して、バッテリ250の残量が一定より大きいと判定した場合(ステップS703−NO)、制御部230は、第3通信部280(無線LAN)によって他のポータブル基地局200との通信を実行させる(ステップS705)。
【0144】
このように無線通信方式の切り替えを行うことで、測位モード中やバッテリ250の残量が少ない状況のときには第1の無線通信方式によりポータブル基地局200間の通信が行われる。また、RFIDタグ100の受信状態が良好でないときには、バッテリ残量に余裕がありさえすれば、第3の無線通信方式によりポータブル基地局200間の通信を行わせることができる。
【0145】
なお、本実施形態の被災者救助支援システムにおける各装置は、内部にコンピュータシステムを有させることができる。そして、動作の過程は、プログラムの形式でコンピュータ読み取り可能な記録媒体に記憶されており、このプログラムをコンピュータシステムが読み出して実行することによって、上記処理が行われる。ここでいう「コンピュータシステム」とは、CPU及び各種メモリやOS、周辺機器等のハードウェアを含むものである。
また、「コンピュータシステム」は、WWWシステムを利用している場合であれば、ホームページ提供環境(あるいは表示環境)も含むものとする。
【0146】
また、各ステップを実現するためのプログラムをコンピュータ読み取り可能な記録媒体に記録して、また、この機能を実現するためのプログラムをコンピュータ読み取り可能な記録媒体に記録して、この記録媒体に記録されたプログラムをコンピュータシステムに読み込ませ、実行することにより、検出対象物の位置情報の推定値を算出する処理を行ってもよい。また、「コンピュータ読み取り可能な記録媒体」とは、フレキシブルディスク、光磁気ディスク、ROM、フラッシュメモリ等の書き込み可能な不揮発性メモリ、CD−ROM等の可搬媒体、コンピュータシステムに内蔵されるハードディスク等の記憶装置のことをいう。
【0147】
さらに「コンピュータ読み取り可能な記録媒体」とは、インターネット等のネットワークや電話回線等の通信回線を介してプログラムが送信された場合のサーバやクライアントとなるコンピュータシステム内部の揮発性メモリ(例えばDRAM(Dynamic Random Access Memory))のように、一定時間プログラムを保持しているものも含むものとする。
【0148】
また、上記プログラムは、このプログラムを記憶装置等に格納したコンピュータシステムから、伝送媒体を介して、あるいは、伝送媒体中の伝送波により他のコンピュータシステムに伝送されてもよい。ここで、プログラムを伝送する「伝送媒体」は、インターネット等のネットワーク(通信網)や電話回線等の通信回線(通信線)のように情報を伝送する機能を有する媒体のことをいう。また、上記プログラムは、前述した機能の一部を実現するためのものであっても良い。さらに、前述した機能をコンピュータシステムに既に記録されているプログラムとの組合せで実現できるもの、いわゆる差分ファイル(差分プログラム)であっても良い。
【符号の説明】
【0149】
100 RFIDタグ
113 アンテナ
120、230、520 制御部
130、240、330、530 記憶部
200 ポータブル基地局
200A 測位基地局
210 第1通信部
220 第2通信部
231 位置推定部
242、331 基地局位置データベース
243、332、532 タグ位置データベース
270 自己測位部
280 第3通信部
300 測位サーバ
310 通信部
320 位置推定部
400 アクセスポイント
500 携帯端末装置
510 通信部
531 地図データ
540 操作部
550 表示部
600 ネットワーク
700 被災地
【技術分野】
【0001】
本発明は、被災者の救助活動に際して利用される被災者救助支援システムと、この被災者救助支援システムにおける情報処理方法に関する。
【背景技術】
【0002】
地震、台風、津波などによる家屋の倒壊、土砂崩れや雪崩などによって行方不明になった被災者を救助するにあたり、人手による捜索が行われているのが実情である。つまり、被災者がいる場所を探すためには、例えば捜索者が大声で呼びかけを行い、その呼びかけに応答して帰ってきた声を頼りに被災者を探すというものである。そして、呼びかけを行っても応答がない場合には、捜索者は、被災者がいるかもしれない場所の見当をつけながら、その場所を中心に探していくほかない。
【0003】
このように、これまでの人手に頼った救助活動では、行方不明になっている多くの被災者の位置を明確に特定することが難しい。一般に、被災から72時間以内であれば被災者の生存率は相当に高いとされている。したがって、上記のような制限時間内にできるだけ多くの行方不明者を探し出して救助できるようにするには、行方不明者のいる位置を的確に把握できるようにすることが必要である。
【0004】
そこで、従来技術として、捜索者がまずはアクティブタグの信号を受信することで大まかな位置を把握した後、携帯型のパッシブ型リーダライタを利用してパッシブタグの位置を捜索しようというシステムが提案されている(例えば、非特許文献1参照)。また、他の従来技術として、RFID機能を有する非接触型データ受送信体から情報を情報読出手段により定期的に読み出し、この読み出した情報に基づいて非接触型データ受送信体の所在を定期的に位置情報として保存するという技術が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2006−127111号公報
【非特許文献】
【0006】
【非特許文献1】総務省信越総合通信局 平成22年度 地域における安心安全のためのRFIDの利活用に関する調査検討会 報告書、p.34-38
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかし、上記非特許文献1に記載されている技術では、捜索者の各々が携帯型のリーダライタを所持して移動しながら、パッシブタグと通信ができる場所を探していく必要がある。つまり、人手への依存度が依然として高く、被災者の早期発見に関して効率的であるとはいえない。
【0008】
また、特許文献1に記載されている技術の場合、非接触型データ受送信体から読み出した情報に基づいて位置情報を保存する情報読出手段は、例えば建物の内部や野外設備などに事前に設置されている必要がある。このために、情報読出手段が設置されていない場所や地域で災害が発生した場合には対応できないという問題がある。
【0009】
そこで本発明は、上記した課題を考慮して、地域や場所の制限無く利用が可能であって、迅速かつ効率的に被災者の位置を特定することのできる被災者救助支援システムを提供することを目的としている。
【課題を解決するための手段】
【0010】
本発明は、上述の課題を解決すべくなされたもので、通信タグと、被災地に設置される複数の可搬型の基地局と、測位装置から成り、前記通信タグは、インパルス波形によりデータの送受信が行われる第1の無線通信方式により通信を行うタグ通信部と、前記タグ通信部により通信相手の前記基地局に対してタグ識別子を送信させるタグ制御部を備え、前記基地局は、前記第1の無線通信方式により通信を行う第1通信部と、第2の無線通信方式による無線通信を経由して前記測位装置と通信するための第2通信部と、前記第1通信部による前記通信タグとの通信に応じて、当該通信タグの位置推定に利用する所定のパラメータと当該通信タグから送信されたタグ識別子とを対応付けて生成した位置パラメータ情報を、前記第2通信部により前記測位装置に対して送信させるための制御を行う基地局制御部とを備え、前記測位装置は、前記基地局から当該測位装置に送信された位置パラメータ情報と、当該位置パラメータ情報の送信元基地局の位置に基づいて、通信タグごとの位置を推定し、通信タグごとの推定位置情報を前記記憶部に記憶させる測位制御部を備えることを特徴とする被災者救助支援システムである。
【0011】
また、本発明は、通信タグと、被災地に設置される複数の可搬型の基地局と、測位装置から成る情報処理システムにおける情報処理方法であって、前記通信タグにおいて、インパルス波形によりデータの送受信が行われる第1の無線通信方式により通信を行うタグ通信部により通信相手の前記基地局に対してタグ識別子を送信させるタグ制御ステップと、
前記基地局において、前記第1の無線通信方式により通信を行う第1通信部による前記通信タグとの通信に応じて、当該通信タグの位置推定に利用する所定のパラメータと当該通信タグから送信されたタグ識別子とを対応付けて生成した位置パラメータ情報を、第2の無線通信方式による通信を行う前記第2通信部により前記測位装置に対して送信させるための制御を行う基地局制御ステップと、前記測位装置において、前記基地局から当該測位装置に送信された位置パラメータ情報と、当該位置パラメータ情報の送信元基地局の位置に基づいて、通信タグごとの位置を推定し、通信タグごとの推定位置情報を記憶部に記憶させる測位制御ステップとを備えることを特徴とする情報処理方法である。
【発明の効果】
【0012】
本発明によれば、被災者救助支援システムとして、地域や場所の制限無く利用が可能であり、迅速かつ効率的に被災者の位置を特定することができるという効果が得られる。
【図面の簡単な説明】
【0013】
【図1】本発明の第1の実施形態としての被災者救助支援システムの構成例を示す図である。
【図2】第1の実施形態としてのRFIDタグの位置算出原理の一例を模式的に示す図である。
【図3】第1の実施形態としてのRFIDタグの構成例を示すブロック図である。
【図4】第1の実施形態としてのポータブル基地局の構成例を示すブロック図である。
【図5】第1の実施形態としてのポータブル基地局が送信する位置パラメータ情報の構造例を示す図である。
【図6】第1の実施形態としての測位サーバの構成例を示すブロック図である。
【図7】第1の実施形態としての測位サーバが記憶する、基地局位置データベースおよびRFIDタグ位置データベースの構造例を示す図である。
【図8】第1の実施形態としてのポータブル基地局とRFIDタグの通信プロトコル(第1例)を模式的に示す図である。
【図9】第1例の通信プロトコルに対応してRFIDタグが実行する処理手順例を示すフローチャートである。
【図10】第1の実施形態としてのポータブル基地局とRFIDタグの通信プロトコル(第2例)を模式的に示す図である。
【図11】第2例の通信プロトコルに対応してRFIDタグが実行する処理手順例を示すフローチャートである。
【図12】第1の実施形態において、RFIDタグからの信号の受信に応じてポータブル基地局が実行する処理手順例を示すフローチャートである。
【図13】第1の実施形態としての測位サーバが実行する処理手順例を示すフローチャートである。
【図14】第2の実施形態としてのポータブル基地局の構成例を示すブロック図である。
【図15】第2の実施形態としてのポータブル基地局の自己位置測位の手法例を模式的に示す図である。
【図16】図15の自己位置測位手法に対応してポータブル基地局が実行する処理手順例を示すフローチャートである。
【図17】第3の実施形態としての被災者救助支援システムの構成例を示す図である。
【図18】第3の実施形態における携帯端末装置の構成例を示すブロック図である。
【図19】第4の実施形態としての被災者救助支援システムの構成例を示す図である。
【図20】第4の実施形態におけるポータブル基地局の構成例を示すブロック図である。
【図21】第4の実施形態におけるポータブル基地局が実行する位置パラメータ情報共有のための処理手順例を示すフローチャートである。
【図22】第5の実施形態における被災者救助支援システムの構成例を示す図である。
【図23】第5の実施形態における測位基地局の構成例を示すブロック図である。
【図24】第5の実施形態におけるポータブル基地局が実行する通信部切り替えのための処理手順例を示すフローチャートである。
【発明を実施するための形態】
【0014】
<第1の実施形態>
[被災者救助支援システムの構成]
以下、本発明の実施形態による被災者救助支援システムについて説明する。図1は、第1の実施形態としての被災者救助支援システムの構成例を示している。本実施形態の被災者救助支援システムは、RFIDタグ100、ポータブル基地局200および測位サーバ300から成る。また、ポータブル基地局200を無線通信経由でネットワーク600と接続するためのアクセスポイント400を備える。
【0015】
RFID(Radio Frequency IDentification)タグ100は、ポータブル基地局200と第1の無線通信方式により通信を行ってタグIDを送信する。タグIDは、RFIDタグ100を一意に識別するための識別子である。
【0016】
上記第1の無線通信方式には、RFIDタグ100の位置を測定することが求められる。そこで、本実施形態では、このような測位機能に対応して、第1の無線通信方式としてUWB−IR(Ultra-Wideband Impulse radio:超広帯域無線)を採用する。UWB−IRは、例えば数ナノ秒程度のきわめて短時間のインパルス状の信号により通信を行う。この特性を利用して、UWB−IRは、例えば数十センチの精度で測位を行うことが可能である。また、UWB−IRは、1GHz程度の非常に広い帯域に拡散して通信が行われるために、同じ周波数帯域を利用する他の無線機器と混信することがなく、消費電力も少ない。本実施形態では、後述するように、このUWB−IRによる高精度な位置測定機能を利用してRFIDタグ100、すなわち、被災者の位置を特定する。
【0017】
このRFIDタグ100は、災害時においても被災者が所持しているようにするため、個人が平常時から携帯する用途のものに適用される。具体的には、キーホルダー、携帯電話のストラップ、学生証、社員証などとしてその外形形状が形成される。また、携帯電話などの内部に備えることも考えられる。また、RFIDタグ100は、災害時に簡単に破損してしまわないように堅牢性を有することが求められる。このために、RFIDタグ100は、例えば樹脂、ガラス繊維、強化プラスチックなどによりカードや筐体に封入された構造を有する。
【0018】
また、このRFIDタグ100は、例えば上記第1の無線通信方式のもとで一定以上の通信距離を確保するために、パッシブではなく、バッテリにより駆動されるアクティブタイプとして構成する。このバッテリには、例えばコイン電池などの一次電池を採用することがまず考えられるが、例えばリチウムイオンバッテリやリチウムポリマーバッテリなどの2次電池を採用することも考えられる。
【0019】
ポータブル基地局200は、被災地700において複数が配置されるもので、通信可能範囲に存在するRFIDタグ100と上記第1の無線通信方式により通信を行う。そして、その通信に基づいて生成した位置パラメータ情報をネットワーク600経由で測位サーバ300に送信する。つまり、ポータブル基地局200は、通信を行ったRFIDタグ100から送信されるタグIDを受信して取得するとともに、このRFIDタグ100との通信時の状態に基づいて、RFIDタグ100の位置推定に用いられるパラメータを生成する。そして、タグIDにパラメータを対応付け、位置パラメータ情報として送信する。なお、位置パラメータ情報の具体例については後述する。
【0020】
また、ポータブル基地局200は、測位サーバ300と通信を行うにあたり、第2の無線通信方式によってアクセスポイント400と通信を行う。アクセスポイント400は、第2の無線通信方式によって接続された通信装置をネットワーク600に接続するための中継機器である。ポータブル基地局200は、このアクセスポイント400との無線通信によって、ネットワーク600経由で測位サーバ300と通信を行うことができる。この第2の無線通信方式としては、例えば、IEEE802.11a/b/g/n等の無線LANを挙げることができる。また、GSM(登録商標)、W−CDMA(登録商標)、CDMA2000(登録商標)、LTE等のセルラーネットワークや、モバイルWiMAX(登録商標)、IEEE802.20等のMAN(Metropolitan Area Network)などを採用することも考えられる。
【0021】
これらのポータブル基地局200は、被災地700において、被災者救助支援システムを使用する捜索者や捜索隊によって、或る程度の距離を隔てた状態で被災地700の各所に設置される。この際、ポータブル基地局200間を設置する間隔は、厳密に一定である必要はない。具体的に、RFIDタグとの通信距離が数十mから100m程度であると想定した場合には、これに応じて、約数十mから100m程度の間隔を空けて、設置しやすい場所に適当に配置されてよい。
【0022】
また、第1の実施形態においては、このように設置したポータブル基地局200の各位置の情報を取得し、この取得したポータブル基地局200ごとの位置情報を、次に説明する測位サーバ300に記憶させる。具体的には、例えば捜索者が、ポータブル基地局200を設置するごとにGPSなどを利用してその位置を測位しておくようにする。そして、これらの記録された位置を収集し、所定の入力デバイスなどを用いて、測位サーバ300に入力してポータブル基地局200のIDと対応付けて記憶させるようにする。
【0023】
測位サーバ300は、ポータブル基地局200から送信される位置パラメータ情報に基づいて、後述するように、RFIDタグ100の位置を推定する。なお、この位置推定の手法例については後述する。そして、このRFIDタグ100ごとの推定位置の情報をRFIDタグ位置データベースとして記憶する。
【0024】
[位置推定手法]
次に、図2を参照して、第1の無線通信方式を利用した位置推定について説明する。図2には、1つのRFIDタグ100と、3つのポータブル基地局200−1〜200−3が示されている。なお、ここでポータブル基地局200−1〜200−3の位置については既知であるとする。
【0025】
まず、RFIDタグ100とポータブル基地局200−1が通信を行うことにより、その通信時間や受信信号強度などに基づいてRFIDタグ100とポータブル基地局200−1の距離d1が算出される。この段階では、RFIDタグ100の位置は、ポータブル基地局200−1を中心とする半径d1の円周C1上であると推定されることになる。
【0026】
次いで、RFIDタグ100とポータブル基地局200−2が通信を行うことにより、RFIDタグ100とポータブル基地局200−2の距離d2も算出されることになる。このように、1つのRFIDタグ100に対する2つのポータブル基地局200−1および200−2の各距離d1、d2が求められた段階で、RFIDタグ100の位置は、ポータブル基地局200−1に対応する円周C1と、ポータブル基地局200−2を中心とする半径d2の円周C2との交点として求められる。円周C1とC2の交点は2つ存在するため、この段階では、RFIDタグ100の位置は、さらに絞り込まれ、この2つの交点のいずれかであるとして推定されることになる。
【0027】
そして、RFIDタグ100とポータブル基地局200−3が通信を行うことにより、RFIDタグ100とポータブル基地局200−3の距離d3も算出されることになる。これにより、RFIDタグ100の位置は、円周C1と、円周C2と、ポータブル基地局200−3を中心とする半径d3の円周C3との交点として推定されることになる。つまり、RFIDタグ100と3つのポータブル基地局200−3の距離が求められることに応じて、1点のRFIDタグ100の位置が推定される。
なお、RFIDタグ100とポータブル基地局200−1〜3との通信は同時に行われてもよい。すなわち、RFIDタグ100が送信した信号をポータブル基地局200−1〜3が同時に受信することで、位置の推定がなされてもよい。
【0028】
このように、RFIDタグ100の位置は、少なくとも3つのポータブル基地局200との距離が既知となることで1点を特定することが可能になる。このように推定されたRFIDタグ100の位置は、前述のようにUWB−IRによる通信を応用して求められるものであり、したがって、数十センチ程度の非常に高い精度を有している。
【0029】
第1の実施形態において、被災地700におけるポータブル基地局200は、その位置にて通信可能なRFIDタグ100のすべてと通信を行い、RFIDタグ100ごとの通信時間、受信信号強度などをはじめとする位置算出に用いられる情報を位置パラメータ情報として測位サーバ300に送信する。具体的に、図2との対応では、ポータブル基地局200−1、200−2および200−3のそれぞれが、測位サーバ300に対して、RFIDタグ100と通信を行って得た位置パラメータ情報を送信する。
【0030】
測位サーバ300は、上記のように送信された位置パラメータ情報のうちから、同じRFIDタグ100の位置パラメータ情報を選択し、これらの選択した位置パラメータ情報を利用して、RFIDタグ100とポータブル基地局200の位置の間の距離を算出する。そして、この算出した距離に基づいて、図2により説明したようにRFIDタグ100の位置を推定する。この場合において、1つのRFIDタグ100に対応する位置パラメータ情報が3つ以上あれば、1点のRFIDタグ100の位置を推定できる。また、位置パラメータ情報が2つであれば、2点のいずれかであるとしてRFIDタグ100の位置を推定できる。さらに位置パラメータ情報が1つであれば、位置パラメータ情報を送信したポータブル基地局200を中心とする所定半径の円周上であることが推定される。
【0031】
測位サーバ300は、上記のように推定したRFIDタグ100ごとの位置をデータベースとして記憶する。例えば、捜索者は、このデータベースの内容を利用することで、被災地700における各RFIDタグ100、すなわち被災者の位置を知ることができる。捜索者は、このように被災者の位置を知るにあたり、被災地700に赴いてポータブル基地局200を設置し、これらのポータブル基地局200の位置を測位して測位サーバ300に記憶させるという作業を行えばよい。つまり、これまでのように捜索者自身が声を出すなどして移動しながら被災者を捜さなくとも、被災地700における被災者の位置を、短時間のうちに効率よく把握することができる。また、本実施形態において、ポータブル基地局200は、捜索者が災害後の被災地700に赴いて設置するものであるために、どの地域で災害が生じても使用できる。
【0032】
[RFIDタグの構成]
図3は、RFIDタグ100の構成例を示している。RFIDタグ100は、通信部110、制御部120、記憶部130、バッテリ140および電源回路150を備える。
【0033】
通信部110は、第1の無線通信方式(UWB−IR)によりポータブル基地局200と通信を行う部位である。この通信部110は、ベースバンド部111と送受信部112を備える。ベースバンド部111は、ベースバンド形式に対応した送受信信号処理を実行する部位である。送受信部112は、RF信号段階での送受信動作を実行する部位である。ベースバンド部111は、送信時において送信データの変調、拡散等の処理を行い、送受信部112は、ベースバンド部111から入力した送信信号をRF帯域の信号に変換してアンテナ113から電波として送出させる。また、送受信部112は、受信時において、アンテナ113にて受信された信号のフィルタリング処理や増幅などを行い、ベースバンド部111は、送受信部112から入力した信号の逆拡散や復調処理を行って受信データを得る。
【0034】
制御部120は、通信部110および記憶部130に対する制御および各種の処理を実行することにより、RFIDタグ100としての動作を実現する部位である。このような制御の1つとして、例えば制御部120は、後述する通信プロトコルに従った通信動作となるように通信部110を制御する。そして、制御部120は、通信部110によりポータブル基地局200と通信の間で通信が行われる際、次に説明する記憶部130に記憶されるタグID131をポータブル基地局200に対して送信するように制御する。なお、制御部120は、例えばCPU(Central Processing Unit)やRAM(Random Access Memory)などを備えて構成され、記憶部130に記憶されるプログラムを実行することにより、その動作が実現される。
【0035】
記憶部130は、例えば制御部120が実行するプログラムや各種データが記憶される部位である。特に、本実施形態の位置推定に対応して、記憶部130にはタグID131が記憶される。タグIDは、RFIDタグ100を一意に識別するための識別子である。なお、記憶部130に対応するハードウェアには、例えばフラッシュメモリなどの半導体記憶素子を採用することができる。
【0036】
バッテリ140は、RFIDタグ100の内部回路を駆動するための電力を供給する部位であり、前述のように、一次電池または二次電池が採用される。電源回路150は、例えばバッテリ140から供給される電力を入力して、所定値の電源電圧VddをRFIDタグ100内の回路に供給する。
【0037】
[ポータブル基地局の構成]
図4は、ポータブル基地局200の構成例を示している。この図に示すポータブル基地局200は、第1通信部210、第2通信部220、制御部230、記憶部240、バッテリ250および電源回路260を備える。
第1通信部210は、第1の無線通信方式により通信を行う部位であり、これにより、RFIDタグ100との通信が可能になる。この第1通信部210は、ベースバンド部211と送受信部212を備えて構成される。なお、これらベースバンド部211と送受信部212の機能および動作については、図3に示したベースバンド部111と送受信部112と同様となるので、ここでの説明は省略する。
【0038】
第2通信部220は、第2の無線通信方式により通信を行う部位である。第2通信部220は、例えば制御部230から転送された送信信号について変調を行い、アンテナ221から電波として送出する。また、第2通信部220は、アンテナ221により受信された受信信号を復調し、これにより得られたデータを制御部230に転送する。この第2通信部220によりアクセスポイント400と接続され、ネットワーク600経由で測位サーバ300と通信を行うことが可能になる。
【0039】
制御部230は、ポータブル基地局200内の各部を制御および各種処理を実行することにより、ポータブル基地局200としての動作を実現する部位である。例えば制御部230は、第1通信部210を制御して所定の通信プロトコルに従ってRFIDタグ100との通信を実行させる。そして、制御部230は、RFIDタグ100との通信により、RFIDタグ100から送信されるタグIDを受信して取得するとともに、通信時の状態に基づいて位置パラメータを生成する。そして、この位置パラメータに、上記タグIDと、後述する記憶部240に記憶される基地局ID241を対応付けた構造の位置パラメータ情報を生成し、第2通信部220により測位サーバ300に対して送信させる。なお、位置パラメータ情報の具体例については後述する。また、制御部230は、例えばCPUやRAMなどを備えて構成され、記憶部240に記憶されるプログラムを実行することにより、その動作が実現される。
【0040】
記憶部240は、制御部230におけるCPUが実行するプログラムのほか各種データを記憶する部位である。記憶部240は、記憶データの1つとして、図示するように基地局ID241を記憶している。基地局ID241は、対応のポータブル基地局200を一意に特定する識別子となる。なお、記憶部240に対応するハードウェアとしては、例えばHDD(Hard Disc Drive)、フラッシュメモリなどを採用することができる。
【0041】
バッテリ250は、RFIDタグ100の内部回路を駆動するための電力を供給する部位であり、例えばリチウムイオンバッテリなどの二次電池を採用することができる。電源回路260は、バッテリ250から供給される電力を入力して、所定値の電源電圧Vddをポータブル基地局200内の回路に供給する。
【0042】
図5は、第2通信部220から測位サーバ300に対して送信される位置パラメータ情報の構造例を示している。この図に示すように、位置パラメータ情報は、基地局ID、タグIDおよび位置パラメータから成る。基地局IDは、位置パラメータ情報の送信元のポータブル基地局200を示すものであり、記憶部240に格納された基地局ID241が格納される。タグIDは、位置パラメータを取得する際に通信していたRFIDタグ100を示すものであり、RFIDタグ100との通信時に取得したタグID131が格納される。
【0043】
位置パラメータは、格納されたタグIDのRFIDタグ100の位置推定のために測位サーバ300が利用するデータであり、ここでは、TOA(Time Of Arrival:到来時間)、TDOA(Time Difference Of Arrival:到来時間差)、RSS(Received Signal Strength:受信信号強度)、AOA(Angle Of Arrival:到来角度)となる。なお、これはあくまでも一例であり、測位サーバ300が採用する位置推定アルゴリズムに応じて適宜変更されてよい。
【0044】
[測位サーバの構成]
図6は、測位サーバ300の構成例を示している。この図の測位サーバ300は、通信部310、位置推定部320および記憶部330を備える。通信部310は、ネットワーク600と通信を行うための部位である。この通信部310により、ネットワーク600経由からアクセスポイント400経由で複数のポータブル基地局200と通信を行い、ポータブル基地局200から送信される位置パラメータ情報を受信することが可能になる。
【0045】
位置推定部320は、RFIDタグの位置を推定する部位である。このために、位置推定部320は、通信部310により受信された位置パラメータ情報を保持したうえで、この保持した位置パラメータ情報を利用して、RFIDタグごとの位置推定を行う。そして、このRFIDタグごとの位置推定結果を、記憶部330に対してRFIDタグ位置データベース332として記憶する。なお、この位置推定処理については後述する。
【0046】
記憶部330は、位置推定部320に関連したデータを記憶する部位であり、ここでは、基地局位置データベース331およびRFIDタグ位置データベース332を記憶することとしている。基地局位置データベース331は、位置推定部320が位置推定に利用するデータベースであり、被災地700に設置されたポータブル基地局200ごとの位置情報が格納される。また、RFIDタグ位置データベース332は、位置推定部320の位置推定結果を記録するデータベースであり、ポータブル基地局200と通信を行ったRFIDタグ100ごとの推定位置情報が格納される。
【0047】
図7(a)は、基地局位置データベース331の構造例を示している。この図に示すように、基地局位置データベース331は、基地局IDごとに位置情報を対応付けた構造を有する。基地局IDは、それぞれ、被災地700に設置されたポータブル基地局200に対応しており、位置情報は、対応の基地局IDが付されたポータブル基地局200が設置された位置を示す。第1の実施形態において、この基地局位置データベース331は、前述のように、捜索者が、被災地700に設置したポータブル基地局200について測位した位置情報をその基地局IDと対応付けて入力することにより、記憶部330に記憶させる。
【0048】
図7(b)は、RFIDタグ位置データベース332の構造例を示している。この図に示すように、RFIDタグ位置データベース332は、タグIDごとに推定位置情報を対応付けた構造を有する。このRFIDタグ位置データベース332には、ポータブル基地局200から受信したすべての位置パラメータ情報に基づいて位置が推定されたすべてのRFIDタグ100ごとに対応するタグIDとの組み合わせが格納される。また、推定位置情報は、対応のタグIDが示すRFIDタグ100について推定された位置を示す。
【0049】
[RFIDタグとポータブル基地局間の通信プロトコル(第1例)]
次に、図8を参照して、RFIDタグ100とポータブル基地局200間の通信プロトコル例について説明する。この通信プロトコルは、第1の無線通信方式による通信におけるRFIDタグ100とポータブル基地局200間の送受信タイミングについて規定したものとなる。
【0050】
この通信プロトコルにおいて、ポータブル基地局200は、図8に示すように、継続して受信モードを設定している。一方、RFIDタグ100は、時間Tsによる休止モードと、これに続く時間Ttによる送信モードを時間経過に従って繰り返すというものになる。休止モードにおいてRFIDタグ100は、例えば通信部110や記憶部130などに対して電力供給を停止した状態(電源停止状態)として、制御部120が必要最小限の電力供給を受けている状態とする。一方、通信モードにおいては、通信部110や記憶部130に対して電力供給を行い、通信部110からタグID131を送信させる。
【0051】
そして、送信モードの時間Ttは、休止モードの時間Tsに対して相当に短い時間を設定する。一具体例として、休止モードの時間Tsを1時間程度に設定し、送信モードの時間Ttを100msec程度に設定する。本実施形態において第1の無線通信方式として採用されるUWB−IRは低消費電力であり、したがって、このように短時間の送信モードと長時間の休止モードとを組み合わせることで、バッテリ140の容量を数年以上持続させることが可能になる。
【0052】
図9は、上記図8に示した通信プロトコルに対応してRFIDタグ100が実行する処理手順例を示すフローチャートである。この図に示す処理は、例えば制御部120(CPU)が実行するものとしてみることができる。
【0053】
まず、制御部120は、内部のタイマをリセットしたうえでスタートさせ、(ステップS101)、休止モードを開始させる(ステップS102)。制御部120は、例えば通信部110および記憶部130に対する電源電圧Vddの供給を停止させ、自身をスタンバイモードとすることで休止モードを設定する。そして、時間Tsが経過するのを待機し(ステップS103−NO)、時間Tsが経過すると(ステップS103−YES)、タイマを再度リセットしたうえでスタートさせる(ステップS104)。
【0054】
次に、制御部120は、これまでの休止モードから送信モードに切り替える(ステップS105)。この際、制御部120は、通信部110と記憶部130に対して電源を供給し、自身もスタンバイモードから復帰する。そして、送信モードにおいて、制御部120は、記憶部130からタグID131を読み出して、通信部110から送信させるための制御を実行する。制御部120は、送信モードに切り替えた後、時間Ttが経過するのを待機しており(ステップS106−NO)、時間Ttが経過したことを判定すると(ステップS106−YES)、ステップS101に戻る。
【0055】
[RFIDタグとポータブル基地局間の通信プロトコル(第2例)]
また、上記第1例の通信プロトコルに代えて、次の第2例としての通信プロトコルとすることも考えられる。そこで、図10を参照して、第2例としての通信プロトコルについて説明する。
【0056】
まず、図10(a)を参照して、RFIDタグ100がポータブル基地局200と通信不可の状態にある場合のRFIDタグ100の通信動作について説明する。この状態は、RFIDタグ100を所持している人の周囲にポータブル基地局200が存在しない平常時に相当する。
【0057】
RFIDタグ100は、時間Tsによる休止モードの後、時間Trによる受信モードを設定する。受信モードでは、通信部110にてポータブル基地局200から送信される呼出信号を受信可能な状態が設定される。
【0058】
そして、RFIDタグ100と通信可能なポータブル基地局200は存在しないことから、この受信モードにおいてポータブル基地局200からの呼出信号は受信されない。このように受信モードにおいてポータブル基地局200からの呼出信号を受信できなかった場合には、時間Trの経過後、再び時間Tsによる休止モードに戻り、さらにこの後、時間Trによる受信モードを設定する。このように、ポータブル基地局200との通信が行われない場合、RFIDタグ100は、休止モードとこれに続く受信モードを繰り返す。なお、一例として、休止モードの時間Tsについては1時間程度を設定し、受信モードの時間Trについては100msec程度を設定することが考えられる。
【0059】
次に、図10(b)を参照して、RFIDタグ100がポータブル基地局200と通信が可能な状態にある場合のRFIDタグ100の通信動作について説明する。この状態は、例えば災害が発生して、RFIDタグ100を所持している人の周囲にポータブル基地局200が配置された状態に相当する。
【0060】
ポータブル基地局200は、時間Tcによる呼出モードとこれに続く時間Trvによる受信モード(タグ信号受信モード)を継続して繰り返す。呼出モードの時間Tcにおいて、ポータブル基地局200の制御部230は、第1通信部210から呼出信号を送信させている。また、受信モードの時間Trvにおいて、制御部230は、第1通信部210について、呼出信号に応答してRFIDタグ100から送信されてくる信号を受信可能な状態を設定する。
【0061】
なお、この図では、一例として、時間Tcと時間Trvについて、それぞれ100msecとしている。時間Tcと時間Trvは、このように同じ時間長が設定されていてもよいし、異なる時間長が設定されてもよい。例えば、呼出モードの時間Tcについては100msec程度を設定することとしたうえで、受信モードTrvについては、例えば1秒程度とするなど、時間Tcより長い時間を設定することも考えられる。
【0062】
一方、RFIDタグ100は、図10(a)にて説明したように、時間Tsによる休止モードに続いて、時間Trによる受信モード(呼出信号受信モード)を設定して呼出信号の受信を待機する。なお、受信モードの時間Trは、例えば呼出モードの時間Tcよりも長い時間が設定される。例えば時間Tcが100msec程度であるとすると、受信モードの時間Trは、150msec〜200msec程度を設定すればよい。これにより、図示するように受信モードと呼出モードで重複する期間が存在することになり、ポータブル基地局200が送信した呼出信号が、RFIDタグ100側にて受信できることになる。
【0063】
上記のように受信モードにおいて呼出信号が受信できた場合、RFIDタグ100は、時間Trが経過すると時間Tt(例えば100msec程度)による送信モードを設定する。そして、この送信モードにより、RFIDタグ100は、呼出信号の送信元のポータブル基地局200に対してタグID131を送信する。このように送信されたタグID131は、ポータブル基地局200において呼出モードの時間Tc経過後に設定された受信モードにおいて受信される。なお、RFIDタグ100は、送信モードの時間Ttを経過した後は時間Trによる受信モードが再度設定される。このように受信モードが設定されることで、例えば直前の送信モードで送信エラーが生じていたとしても、再度、呼出信号に応答してタグIDを送信することが可能になる。また、新たに他のポータブル基地局200から呼出信号が送信された場合にも、これに応答してタグIDを送信することが可能になる。
【0064】
このような通信プロトコルの場合、周囲にポータブル基地局200が配置されていない平常時の状況では、RFIDタグ100は、例えば一時間に一回程度の頻度で100msec程度の期間により受信モードが設定されて起動するが、これ以外の期間は休止状態であることから、バッテリ140の寿命を長く保たせることが可能になる。また、この第2例の通信プロトコルでは、ポータブル基地局200からの呼出信号が受信されない限り、送信モードが設定されないようになっているため、平常時において送信モードによりタグIDが送信されることがない。これにより、平常時においてタグIDが傍受されることもなくなるため、セキュリティを確保することができる。
【0065】
図11は、上記図10に示した第2例の通信プロトコルに対応してRFIDタグ100が実行する処理手順例を示している。この図に示す処理も、制御部120(CPU)が実行するものとしてみることができる。
【0066】
制御部120は、内部のタイマをリセットしたうえでスタートさせ(ステップS201)、休止モードを設定する(ステップS202)、時間Tsが経過するのを待機している(ステップS203−NO)。そして、時間Tsが経過すると(ステップS203−YES)、再度、タイマをリセットしたうえでスタートさせ(ステップS204)、受信モードを設定する(ステップS205)。つまり、制御部120は、スタンバイモードから復帰し、通信部110と記憶部130に対して電源供給を再開するとともに、通信部110についてポータブル基地局200からの呼出信号を受信可能な状態に設定する。
【0067】
制御部120は、上記の状態のもとで、時間Trが経過するのを待機しており(ステップS206−NO)、時間Trが経過すると(ステップS206−YES)、今回設定した受信モードの期間内において呼出信号が受信されたか否かについて判定する(ステップS207)。
【0068】
上記呼出信号が受信されなかったと判定した場合(ステップS207−NO)、制御部120はステップS201に戻る。これに対して呼出信号が受信されたと判定した場合(ステップS207−YES)、制御部120は、タイマのリセット、スタートを行ったうえで(ステップS208)、送信モードを設定する(ステップS209)。送信モードにおいて、制御部120は、記憶部130からタグID131を読み出し、通信部110により、このタグID131を呼出信号の送信元のポータブル基地局200に対して送信する。そして、制御部120は、送信モードを開始させた状態のもとで、時間Ttが経過するのを待機しており(ステップS210−NO)、時間Ttが経過すると(ステップS210−YES)ステップS204に戻り、受信モードを再開させる。
【0069】
[ポータブル基地局の処理手順例]
次に、図12のフローチャートを参照して、第1の実施形態におけるポータブル基地局200が実行するタグIDの受信および位置パラメータ情報送信のための処理手順例について説明する。なお、この図に示す処理は、制御部230が実行するものとしてみることができる。
【0070】
制御部230は、先に図8または図10により説明した受信モードにおいて、RFIDタグ100からの送信信号が受信されるのを待機している(ステップS301−NO)。そして、RFIDタグ100からの送信信号が受信されたことを判定すると(ステップS301−YES)、例えば第1通信部210によりその受信信号の復調処理等を実行させて、その受信信号に含まれているタグIDを取得する(ステップS302)。
【0071】
また、制御部230は、今回のRFIDタグ100との通信時において第1通信部210により検出させたTOA、TDOA、RSS、AOAの各値を位置パラメータとして取得する(ステップS303)。
【0072】
次に、制御部230は、ステップS302により取得したタグIDと、記憶部240から読み出した基地局IDと、ステップS303により取得した位置パラメータにより、位置パラメータ情報(図5参照)を生成する(ステップS304)。そして、制御部230は、この位置パラメータ情報を、第2通信部220から測位サーバ300に対して送信させる(ステップS305)。このように、ポータブル基地局200は、通信可能な1つ以上のRFIDタグと通信を行い、この通信を行ったRFIDタグ100ごとに、位置推定に利用する情報(位置パラメータ情報)を測位サーバ300に送信するものである。
【0073】
[測位サーバの処理手順例]
次に、図13のフローチャートを参照して、測位サーバ300の位置推定部320が実行する位置推定のための処理手順例について説明する。なお、この図に示されている処理が実行される段階では、例えば、被災地700に設置されたすべてのポータブル基地局200から送信された位置パラメータ情報を保持している場合を想定する。
【0074】
位置推定部320は、例えば自身が保持している位置パラメータ情報に格納されているタグIDのうちから、1つのタグIDを位置推定の処理対象として決定する(ステップS401)。そして、自身が保持している位置パラメータ情報のうちから、上記処理対象として決定されたタグIDを格納するすべての位置パラメータ情報を選択する(ステップS402)。このように選択される位置パラメータ情報の数は、処理対象のタグIDに対応するRFIDタグ100と通信を行ってタグID131を受信することのできたポータブル基地局200の数に対応する。
【0075】
次に、位置推定部320は、上記ステップS402により選択した位置パラメータ情報の送信元であるポータブル基地局200ごとの位置情報を取得する(ステップS403)。このために、位置推定部320は、ステップS402により選択された位置パラメータ情報の各々に格納されている基地局IDごとに対応する位置情報を、記憶部330の基地局位置データベース331から検索して取得する。これにより、RFIDタグ100の位置推定のために必要なポータブル基地局200の位置が既知となる。
【0076】
次に位置推定部320は、位置推定処理を実行する(ステップS404)。この際、位置推定部320は、位置パラメータ情報における位置パラメータ(TOA、RSSおよびAOA)を用いて、その位置パラメータ情報送信元のポータブル基地局200の位置から処理対象のRFIDタグ100までの距離を算出する。そして、このようにして得られた距離の情報を利用して、例えば図2により説明した手法に基づいてRFIDタグ100の位置を推定する。なお、このような位置推定にあっては、上記TOA、RSSおよびAOAに加えて、TDOA(Time Difference Of Arrival:到来時間差)を利用する手法も知られているが、このTDOAは、ステップS402により複数の位置パラメータ情報が選択された場合に、これらの位置パラメータ情報において格納されるTOAを利用して求めることも可能である。
【0077】
そして、位置推定部320は、上記ステップS404によって推定された位置情報(推定位置情報)を、ステップS401により選択したタグIDに対応付けて、RFIDタグ位置データベース332に対して新規登録するように記憶させる(ステップS405)。
【0078】
次に位置推定部320は、自己が保持するすべての位置パラメータ情報が格納するタグIDに対応するすべてのRFIDタグ100についての位置推定が完了したか否かについて判定する(ステップS406)。ここで、まだ位置推定されていないRFIDタグ100が残っている場合(ステップS406−NO)、位置推定部320は、ステップS401に戻り、次の処理対象のタグIDを決定したうえで、以降の位置推定のための処理を実行する。そして、すべてのRFIDタグ100の位置推定が完了したことを判定すると(ステップS406−YES)、位置推定部320は、これまでの処理を終了させる。この図に示す処理が終了した段階では、RFIDタグ位置データベース332の内容として、被災地700に設置されたポータブル基地局200と通信を行ったすべてのRFIDタグ100についての位置情報が得られていることになる。
【0079】
<第2の実施形態>
[ポータブル基地局の構成例]
続いて、第2の実施形態について説明する。図14は、第2の実施形態におけるポータブル基地局200の構成例を示している。なお、この図において、図4と同一部分には同一符号を付して説明を省略する。また、第2の実施形態に対応する被災者救助支援システムの全体構成は、図1と同様でよい。
【0080】
図14におけるポータブル基地局200は、図4に示した構成に対して自己測位部270が付加された構成となっている。自己測位部270は、自己の位置を測定する部位である。この自己測位部270により測定された自己の位置情報は、制御部230の制御によって、記憶部240に記憶される基地局ID241と対応付けられたうえで、第2通信部220から測位サーバ300に対して送信される。
【0081】
測位サーバ300は、受信したポータブル基地局200の基地局ID241と位置情報とを対応付けて、記憶部330の基地局位置データベース331に対して新規登録するように記憶させる。
【0082】
このように、第2の実施形態では、ポータブル基地局200の各々が自己の位置を測定して測位サーバ300に送信し、測位サーバ300は、この送信された位置の情報を記憶するように構成されている。つまり、第2の実施形態において、測位サーバ300は、ポータブル基地局200からその位置情報を収集して基地局位置データベース331を構築することができる。これにより、捜索者は、設置したポータブル基地局200ごとの位置を測定し、その測定した情報を測位サーバ300に入力するという作業を行う必要がなくなり、さらに効率のよい被災者救助作業が行えることになる。
【0083】
[自己測位部の具体例]
自己測位部270の具体例として、1つには、GPSに対応した測位デバイスを採用することが考えられる。
【0084】
また、1つには、自己測位部270に第1の無線通信方式に対応する通信機能を与えたうえで、以下に説明するようにポータブル基地局200の各々が自己位置を測定させるように構成することが考えられる。なお、図2においては、3つ以上の基地局(すなわち既知の座標)とRFIDタグ100との距離が既知とされることによってRFIDタグ100の位置が一点で求められるものと説明したが、1つの既知の座標(基地局)に基づいて位置を推定する技術も知られている。そこで、以下においては、説明を簡単なものとするために、1つの既知の座標(基地局)に基づいて位置を推定することを前提とする。
【0085】
図15は、被災地において配置される8個のポータブル基地局200(200−1〜200−8)を模式的に示している。これらポータブル基地局200−1〜200−8のうち、ポータブル基地局200−1については、その配置された位置の座標(x1,y1)が測定されており、その位置を示すデータが記憶部240に記憶されているものとする。
【0086】
なお、ポータブル基地局200−1については、GPSに対応した測位デバイスを設けることで、その位置を取得することができる。また、例えば捜索者がポータブル基地局200−1の設置時に測位を行って、その絶対位置の座標を入力して記憶させることとしてもよい。このように記憶された座標は、被災地700における基準位置として設定される。
【0087】
ここで、ポータブル基地局200−1に対して、ポータブル基地局200−2およびポータブル基地局200−6が通信可能であるとする。すると、ポータブル基地局200−2およびポータブル基地局200−6は、それぞれ、ポータブル基地局200−1から受信した位置を基準座標とすることで、自己の位置(座標)を求めることができる。
【0088】
次に、ポータブル基地局200−2に対しては、ポータブル基地局200−3が通信可能とされている。これにより、ポータブル基地局200−3は、ポータブル基地局200−2から受信したポータブル基地局200−2の位置情報を基準座標として自己の位置を求めることができる。以降は、同様に、ポータブル基地局200−4および200−5の各々は、ポータブル基地局200−3から受信した位置情報を基準座標として自己の位置を求める。また、ポータブル基地局200−7および200−8も、それぞれ、ポータブル基地局200−6から受信した位置情報を基準座標として自己の位置を求める。
【0089】
このように、例えばポータブル基地局200−1を基点とするポータブル基地局200間の通信により求められる距離の情報を共有することによって、ポータブル基地局200ごとの位置を連鎖的に求めていくことが可能である。
【0090】
そして、上記の手法では、第1の無線通信方式を利用して位置を求めている。前述のように、第1の無線通信方式による位置推定は、例えばGPSよりも高い精度を有するものであり、したがって、この手法であれば、非常に高い精度のポータブル基地局200の位置情報を自動的に得ることが可能になる。
【0091】
図16のフローチャートは、上記図15により説明した手法に対応した自己測位のための処理手順例を示している。この図に示す処理は、図14における自己測位部270が実行するものとする。また、この場合の自己測位部270は、例えば制御部230と同様に、CPUがプログラムを実行することにより実現される機能としてみることができる。
【0092】
自己測位部270は、他の1つのポータブル基地局200との通信が確立されるのを待機しており(ステップS501−NO)、通信が確立されると(ステップS501−YES)、既に自己の位置情報を取得済みであるか否かについて判定する(ステップS502)。ここで、自己の位置情報を取得済みであると判定した場合(ステップS502−YES)、自己測位部270は、自己の位置情報を、通信が確立されている他のポータブル基地局200に送信する(ステップS506)。
【0093】
一方、自己の位置情報が取得済みではないと判定した場合(ステップS502−NO)、自己測位部270は、通信が確立されている他のポータブル基地局200から位置情報が受信されたか否かについて判定する(ステップS503)。他のポータブル基地局200は、自己の位置情報を取得済みであれば、その位置情報を送信してくるが、取得済みでなければ送信を行わない。
【0094】
他のポータブル基地局200からの位置情報が受信されなかったと判定した場合(ステップS503−NO)、自己測位部270はステップS501に戻り、これまでとは異なる他のポータブル基地局200との通信が確立されるのを待機する。これに対して、位置情報が受信されたと判定した場合(ステップS503−YES)、自己測位部270は、受信した位置情報を基準として自己の位置を測定する(ステップS504)。そして、測定された位置情報を測位サーバ300に送信する(ステップS505)。
【0095】
なお、上記図15および図16により説明した自己測位のための手法にあっては、自己測位部270における第1の無線通信方式に対応する通信機能を、第1通信部210を共用することにより実現することが可能である。これにより、RFIDタグ100との通信および他のポータブル基地局200との通信に利用する通信部が共通化されることとなり、例えばハードウェア資源およびソフトウェア資源を削減することが可能になる。
【0096】
<第3の実施形態>
図17は、第3の実施形態としての被災者救助支援システムの構成例を示している。この図において、図1と同一部分は同一符号を付して説明を省略する。この第3の実施形態の被災者救助支援システムは、第1の実施形態の構成に対して、携帯端末装置500が追加される。
【0097】
携帯端末装置500は、被災地700の現場において捜索者が所持する。そして、携帯端末装置500は、測位サーバ300から受信したRFIDタグ位置データベース332のデータに基づいて、例えば画像表示によって被災地700の地域におけるRFIDタグ100の位置を提示する。このために、携帯端末装置500は、測位サーバ300とアクセスポイント400経由で通信するための第2の無線通信方式に対応する通信機能と、表示機能を備える。また、携帯端末装置500は、捜索者が携帯可能なようにサイズや形状が設定されており、また、例えば二次電池などのバッテリを内蔵し、このバッテリを電源として動作可能なように構成されている。
【0098】
被災地700の現場にいる捜索者は、携帯端末装置500にRFIDタグ100の位置を表示させることにより、自分の周囲に存在しているRFIDタグ100の位置を把握することができる。そして、このRFIDタグ100の位置へとすぐに赴くことで、被災者を迅速に発見することができる。
【0099】
図18は、携帯端末装置500の構成例を示している。この図に示す携帯端末装置500は、通信部510、制御部520、記憶部530、操作部540、表示部550、バッテリ560および電源回路570を備える。
【0100】
通信部510は、第2の無線通信方式に対応して通信を行う部位であり、例えばポータブル基地局200の第2通信部220と同様の構成を採る。これにより、携帯端末装置500は、アクセスポイント400と接続して、ネットワーク600経由で測位サーバ300と通信することが可能となる。
【0101】
制御部520は、例えばCPUおよびRAMなどを備えて構成され、各種の制御および処理を実行することにより、携帯端末装置500としての動作を実現する部位である。
【0102】
記憶部530は、制御部520におけるCPUが実行するプログラムのほか、各種必要なデータを記憶する。この図では、記憶部530に記憶されるデータのうち、RFIDタグ100の位置表示に対応して利用されるデータとして、地図データ531およびRFIDタグ位置データベース532が示される。
【0103】
地図データ531は、少なくとも被災地700の地域を含む地図データである。また、RFIDタグ位置データベース532は、被災地700に存在するRFIDタグ100ごとの位置を示すデータである。このRFIDタグ位置データベース532は、携帯端末装置500が測位サーバ300から受信したRFIDタグ位置データベース332を記憶部530に記憶させたものである。
【0104】
操作部540は、携帯端末装置500に対して備えられる各種の操作子を一括して示したものである。なお、例えば表示部550がタッチパネルとして構成される場合には、このタッチパネルのセンサも操作部540に含められることになる。この操作部540における操作子は、操作が行われるのに応じて操作信号を制御部520に対して出力する。制御部520は、入力した操作信号に応じて所定の処理を実行する。これにより、操作に応じた携帯端末装置500の動作が実現される。
【0105】
表示部550は、例えば液晶ディスプレイデバイスなどとされ、制御部520の制御に応じて画像を表示する部位である。
【0106】
バッテリ560は、携帯端末装置500の電源となるもので、例えば二次電池などとされる。電源回路570は、バッテリ560から供給される電力を受けて所定値の電源電圧Vddとして内部回路に出力する。
【0107】
上記構成による携帯端末装置500によるRFIDタグ100の位置表示のための動作例について説明する。捜索者は、例えば、RFIDタグ位置データベース332のダウンロードを指示するための操作を操作部540に対して行う。この操作に応じて制御部520には、通信部510により、測位サーバ300に対してRFIDタグ位置データベース332のダウンロード要求を送信する。この要求に応じて送信されてきたRFIDタグ位置データベース332が通信部510にて受信されると、制御部520は、受信したRFIDタグ位置データベース332を記憶部530に転送し、RFIDタグ位置データベース532として記憶させる。このように、携帯端末装置500は、通信によって測位サーバ300から被災地700に存在するRFIDタグ100の位置を示す情報を取得する。
【0108】
このようにRFIDタグ位置データベース532を記憶する携帯端末装置500の操作部540に対して、捜索者は、RFIDタグ100の位置の表示を指示するための操作を行う。この操作に応じて制御部520は、記憶部530において記憶される地図データ531を読み出して表示部550に地図画像として表示させる。また、これとともに、RFIDタグ位置データベース532を読み出して、このRFIDタグ位置データベースにより示されるRFIDタグ100の位置を、表示された地図データの位置と対応させて重畳表示させる。これにより、表示部550には、地図上にRFIDタグ100の存在する位置が示されるように画像の表示が行われる。捜索者は、この画像を見ることにより、自分の近辺におけるRFIDタグ100の位置を知ることができる。このように、捜索者は、携帯端末装置500を所持することにより、測位サーバ300からRFIDタグ100の位置情報を即座に取得してその位置を知ることができる。これにより、捜索作業を、さらに迅速かつ効率的に行うことが可能になる。
【0109】
なお、図示は省略しているが、携帯端末装置500に対してGPSに対応した測位機能を与えるなどして自己の位置を測位できるようにして、表示部550に表示される地図上に対して、RFIDタグ100の位置とともに、自己の位置を表示させるようにしてもよい。これにより、捜索者は、自己の位置と周囲のRFIDタグ100との位置関係を容易に把握することが可能となり、さらに効率的に捜索作業を行うことが可能になる。
【0110】
<第4の実施形態>
図19は、第4の実施形態における被災者救助支援システムの構成例をしている。なお、この図において、図1と同一部分には同一符号を付して説明を省略する。この第4の実施形態における被災者救助支援システムが備える装置としては、第1の実施の形態と同様である。そのうえで、第4の実施形態においては、ポータブル基地局200間で所定の無線通信方式による通信を行うように構成される。
【0111】
そして、この第4の実施形態においては、このポータブル基地局200間の通信により、1つのポータブル基地局200がRFIDタグ100と通信することにより生成した位置情報パラメータ(図5)を、他のポータブル基地局200にも送信する。そして、ポータブル基地局200の各々は、自己が生成した位置パラメータ情報の送信だけではなく、他のポータブル基地局200から受信した位置パラメータ情報も測位サーバ300に対して送信する。
【0112】
なお、上記のような動作をポータブル基地局200が一斉に行っている状態では、多数の同一の位置パラメータ情報がループするようにしてポータブル基地局200間で送受信され、これが輻輳などの原因となる。また、測位サーバ300に対しても多数の同一の位置情報パラメータ情報が同時に送信されることとなり、同じく輻輳やトラフィックの著しい増加を招く可能性がある。そこで、例えばポータブル基地局200において過去に一度受信した位置パラメータ情報は送信しないようにして、輻輳を回避できるように構成することが好ましい。
【0113】
被災地700の現場では、必ずしもすべてのポータブル基地局200がアクセスポイント400と通信が可能であるとは限らず、一部のポータブル基地局200がアクセスポイント400と通信が行えない状態となる場合が想定される。この原因として、1つにはアクセスポイント400とポータブル基地局200間の距離や障害物などの影響で電波が到達しない状態を挙げることができる。また、何らかの要因で干渉やフェージングなどの電波障害が生じる状態を挙げることができる。
【0114】
そこで、第4の実施形態では、前述のように、ポータブル基地局200間で位置パラメータ情報を授受するように通信を行い、受信した位置パラメータ情報を測位サーバ300に送信させるようにする。これにより、アクセスポイント400と直接通信を行えない状態のポータブル基地局200が生成した位置パラメータ情報も、他のポータブル基地局200によって測位サーバ300に送信される。この結果、測位サーバ300は、被災地700に設置されたすべてのポータブル基地局200により生成された位置パラメータ情報を収集することができる。このように、第4の実施形態は、ポータブル基地局200とアクセスポイント400間の通信に関してロバストな被災者救助支援システムを構築することが可能になる。
【0115】
図20は、第4の実施形態におけるポータブル基地局200の構成例を示している。なお、この図において、図4と同一部分には同一符号を付して説明を省略する。この図に示すポータブル基地局200は、図4の構成に対して第3通信部280をさらに備えて構成される。
【0116】
第3通信部280は、所定の第3の無線通信方式により他のポータブル基地局200との通信を実行する部位である。第3通信部280は、制御部230の制御に応じて、送信データについて無線通信方式に対応した変調処理や増幅などを施してアンテナ271より電波として送出させる。また、第3通信部280は、アンテナ271にて受信した他のポータブル基地局200からの信号を入力して増幅や復調処理などを施して受信データを得る。
【0117】
図21は、第3の実施の形態に対応してポータブル基地局200が実行する位置パラメータ情報の送受信に関する処理手順例を示している。この図に示す処理は制御部230が実行するものとしてみることができる。
【0118】
制御部230は、他のポータブル基地局200からの位置パラメータ情報が第3通信部280にて受信されるのを待機している(ステップS601−NO)。そして、位置パラメータ情報が受信されると(ステップS601−YES)、この受信した位置パラメータ情報が送信履歴に登録されているか否かについて判定する(ステップS602)。
【0119】
なお、送信履歴は、当該ポータブル基地局200が既に一度受信して測位サーバ300および他のポータブル基地局200に対して送信した位置情報パラメータ情報を示す情報であり、制御部230の内部のRAMに保持される。また、図示は省略するが、送信履歴の構造としては、いくつか考えることができる。1つには、これまでに送信した位置パラメータ情報のデータを格納した構造とすることが考えられる。また、位置パラメータ情報の同一性は、格納される基地局IDとタグIDの組み合わせによって一意に特定できるので、これまでに送信した位置パラメータ情報の基地局IDとタグIDの組み合わせを格納した構造とすることが考えられる。
【0120】
そして、制御部230は、受信した位置パラメータ情報が送信履歴に登録済みである場合には(ステップS602−YES)、この受信した位置パラメータ情報を送信することなく廃棄してステップS601に戻る。一方、送信履歴に登録済みでない場合(ステップS602−NO)、制御部230は、受信した位置パラメータ情報を第2通信部220から測位サーバ300に対して送信させる(ステップS603)。また、第3通信部280により例えばブロードキャストによって他のポータブル基地局200に対して送信させる(ステップS604)。そして、制御部230は、上記ステップS603およびS604により送信した位置パラメータ情報を新規登録するように送信履歴の更新を実行する(ステップS605)。
【0121】
第4の実施形態において、第3通信部280に採用される第3の無線通信方式としてはIEEE802.11a/b/g/n等の無線LANを挙げることができる。また、GSM(登録商標)、W−CDMA(登録商標)、CDMA2000(登録商標)、LTE等のセルラーネットワークや、モバイルWiMAX(登録商標)、IEEE802.20等のMAN(Metropolitan Area Network)などを採用することも考えられる。また、第1の通信方式を採用することも考えられる。
【0122】
そのうえで、第3通信部280が対応する第3の無線通信方式と、第2通信部220が対応する第2の無線通信方式とが同じであってもよい。このように第3の無線通信方式と第2の無線通信方式が同じである場合、第3通信部280を省略して、第2通信部220をアクセスポイント400との通信と他のポータブル基地局200との通信とで共用するように構成することができる。このように第2通信部220を共用することで、アクセスポイント400との通信と他のポータブル基地局200との通信を実行するにあたり、ハードウェアやリソースを削減することが可能となる。
【0123】
また、第3通信部280が対応する第3の無線通信方式について、第1通信部220が対応する第1の無線通信方式とを同じとすることもできる。このように第3の無線通信方式と第1の無線通信方式が同じである場合にも、第3通信部280を省略して、第1通信部210をRFIDタグ100との通信と他のポータブル基地局200との通信とで共用するように構成することができる。この場合にも、ハードウェアやリソースの削減が図られる。
【0124】
<第5の実施形態>
図22は、第5の実施形態としての被災者救助支援システムの構成例を示している。なお、この図において図1と同一部分には同一符号を付して説明を省略する。この第5の実施形態としての被災者救助支援システムでは測位サーバ300が省略される。また、これに伴って、測位サーバ300とポータブル基地局200とをネットワーク600経由で接続するためのアクセスポイント400もシステム構成から省略される。つまり、第5の実施形態における被災者救助支援システムは、被災地700において設置されるポータブル基地局200と、被災地700に存在するRFIDタグ100から成る。
【0125】
そのうえで、被災地700におけるポータブル基地局200のうち、少なくとも1つは測位サーバ300に相当する測位機能が与えられた測位基地局200Aが設置される。測位基地局200Aは、ポータブル基地局200の構成にRFIDの測位機能を付加して構成したものである。
【0126】
図23は、測位基地局200Aの構成例を示している。なお、この図において、図20のポータブル基地局200と同一部分には同一符号を付して説明を省略する。この図に示す測位基地局200Aは、例えば図20のポータブル基地局200において備えられていた第2通信部220が省略されている。なお、図23における第3通信部280は、特許請求の範囲に記載の測位通信部に相当する。また、制御部230は、例えば自身の処理機能として位置推定部231を備える。この位置推定部231は、第3通信部280により受信した位置パラメータ情報に基づいてRFIDタグ100の位置推定を行う部位であり、その動作は、図6の測位サーバ300の位置推定部320と同様となる。また、位置推定部320を備えることに対応して、記憶部240には、基地局位置データベース242およびRFIDタグ位置データベース243が記憶される。これら基地局位置データベース242およびRFIDタグ位置データベース243は、図7に示した基地局位置データベース331およびRFIDタグ位置データベース332と同様の構造を有する。
【0127】
また、第5の実施形態におけるポータブル基地局200は、図示は省略するが、先の図20に示す構成から第2通信部220を省略した構成とされてよい。第5の実施形態において、ポータブル基地局200は、第3通信部280により他のポータブル基地局200または測位基地局200Aと通信を行う。これにより、ポータブル基地局200および測位基地局200A間で通信網が形成される。そして、ポータブル基地局200は、自己が生成した位置パラメータ情報または他のポータブル基地局200から受信した位置パラメータ情報を、測位基地局200Aを送信先として上記通信網を経由して送信する。
【0128】
上記構成において、RFIDタグ100と通信可能なポータブル基地局200は、通信相手のRFIDタグ100に対応する位置パラメータ情報を生成し、測位基地局200Aに送信する。
【0129】
この際、位置パラメータ情報送信元のポータブル基地局200と測位基地局200Aとの距離が通信可能範囲外であるなどの理由で直接通信できない場合には、他の1つ以上のポータブル基地局200を順次中継して測位基地局200Aに到達させるようにすればよい。なお、このためには、第3通信部280にルーティング機能を与えることとすればよい。
【0130】
上記の通信により、測位基地局200Aにおいては、第3通信部280により位置パラメータ情報が受信される。位置推定部320はこのように受信される位置パラメータ情報を収集し、RFIDタグ100ごとの位置を推定し、その推定結果をRFIDタグ位置データベース243として記憶させる。
【0131】
なお、測位基地局200Aの記憶部240において記憶される基地局位置データベース242は、第1の実施形態と同様に、捜索者がポータブル基地局200ごとに測定した位置を入力することで記憶させることができる。
【0132】
または、第2の実施形態と同様に、ポータブル基地局200に自己測位部270を備え、ポータブル基地局200の各々が自己測位部270により自己位置を測定する。そのうえで、ポータブル基地局200間で形成される通信網を介して、測定した自己の位置情報を、基地局IDとともに測位基地局200Aに対して送信する。そして、測位基地局200Aが、受信した位置情報と基地局IDにより基地局位置データベース242を構築して記憶部240に記憶させるようにしてもよい。このような被災者救助支援システムの構成であれば測位サーバ300が不要となるので、システム構成がより簡易で扱いやすくなる。
【0133】
また、この第5の実施の形態においては、第3の実施の形態に準じて、被災者救助支援システムに携帯端末装置500を追加して備えることができる。この場合の携帯端末装置500の通信部510は、ポータブル基地局200との通信が可能なように、第3の無線通信方式に対応する構成を採る。
【0134】
そのうえで、ポータブル基地局200間の通信網を利用して、測位基地局200Aが記憶するRFIDタグ位置データベース243を、ポータブル基地局200の各々にも伝送して記憶させる。つまり、ポータブル基地局200間でRFIDタグ位置データベース243を共有する。
【0135】
このためには、測位基地局200Aの第3通信部280からブロードキャストでRFIDタグ位置データベース243を送信させる。そして、このRFIDタグ位置データベース243を受信したポータブル基地局200は、受信したRFIDタグ位置データベース243を記憶部240に記憶するとともに、他のポータブル基地局200に対して第3通信部280からブロードキャストで送信する。これにより、被災地700におけるポータブル基地局200の各々が同一内容のRFIDタグ位置データベース243を共有することができる。
【0136】
そして、携帯端末装置500は、通信可能なポータブル基地局200からRFIDタグ位置データベース243を受信し、記憶部530にRFIDタグ位置データベース532として記憶させる。以降、携帯端末装置500は、このRFIDタグ位置データベース532に基づいてRFIDタグ100の位置を表示部550に表示させることができる。
【0137】
先の第4の実施形態においても説明したように、第3通信部280によるポータブル基地局200間の無線通信方式には、第1の無線通信方式を採用することも可能であり、また、この場合には、第3通信部280と第1通信部210を共通化した構成とすることができる。
【0138】
第1の無線通信方式は低消費電力であり、また、第1の無線通信方式を採用すれば、第5の実施形態においても、図15および図16に準じてポータブル基地局200ごとの絶対位置座標を算出することが可能となるという利点がある。ただし、第1の無線通信方式は、例えば輻輳制御やコリジョン制御が行われないことから、RFIDタグ100との通信も同時に行われている場合には、ポータブル基地局200間の通信がRFIDタグ100との通信の障害になる場合がある。このようにRFIDタグ100との通信が良好でなくなくなるような状況では、ポータブル基地局200間の通信は、無線LANをはじめとして、第1の無線通信方式以外の方式による通信を行ったほうがよいことになる。
【0139】
このような観点からすると、現在の動作モードや通信状況などに応じて、ポータブル基地局200間の通信に際して、無線通信方式を第1の無線通信方式と、これ以外の所定の無線通信方式との間で動的に切り替えるように構成することが考えられる。以降、このための構成について説明する。このように無線通信方式を切り替える場合、ポータブル基地局200の第3通信部280は、第1の無線通信方式とこれ以外の所定の無線通信方式とで切り替え可能なように構成することになるが、第1の無線通信方式については第1通信部210を利用できる。そこで、以降の説明においてポータブル基地局200が第1の無線通信方式により通信を行う場合には、第1通信部210を利用することとする。そのうえで、第3通信部280の通信方式には無線LANを採用することとする。また、ポータブル基地局200は、図14の自己測位部270を備える。この自己測位部270は、第1通信部210による他のポータブル基地局200との通信を利用して、図15および図16の手法により自己の絶対値座標を算出する。
【0140】
図24のフローチャートは、ポータブル基地局200が実行する、ポータブル基地局200間通信における通信方式切り替えのための処理手順例を示している。この図に示す処理は、制御部230が実行するものとしてみることができる。
【0141】
制御部230は、現在において自己の絶対値座標を求める測位モード中であるか否かについて判定する(ステップS701)。そして、測位モード中である場合(ステップS701−YES)、制御部230は、第1通信部210(第1の無線通信方式)により他のポータブル基地局200との通信を実行させる(ステップS704)。
【0142】
これに対して、測位モード中でない場合(ステップS701−NO)、制御部230は、現在において第1通信部210により受信されるRFIDタグ100の受信信号強度が一定以上であるか否かについて判定する(ステップS702)。ここで、受信信号強度が一定以上である場合(ステップS702―YES)、制御部230は、ステップS704に進む。一方、受信信号強度が一定未満である場合(ステップS702−NO)、制御部230は、さらにバッテリ250の残量が一定以下であるか否かについて判定する(ステップS703)。
【0143】
バッテリ250の残量が一定以下であると判定した場合(ステップS703−YES)、制御部230はステップS704に進む。つまり、消費電力が少ない第1の無線通信方式に切り替えることで、バッテリ250の残量をより長時間持続させるようにする。これに対して、バッテリ250の残量が一定より大きいと判定した場合(ステップS703−NO)、制御部230は、第3通信部280(無線LAN)によって他のポータブル基地局200との通信を実行させる(ステップS705)。
【0144】
このように無線通信方式の切り替えを行うことで、測位モード中やバッテリ250の残量が少ない状況のときには第1の無線通信方式によりポータブル基地局200間の通信が行われる。また、RFIDタグ100の受信状態が良好でないときには、バッテリ残量に余裕がありさえすれば、第3の無線通信方式によりポータブル基地局200間の通信を行わせることができる。
【0145】
なお、本実施形態の被災者救助支援システムにおける各装置は、内部にコンピュータシステムを有させることができる。そして、動作の過程は、プログラムの形式でコンピュータ読み取り可能な記録媒体に記憶されており、このプログラムをコンピュータシステムが読み出して実行することによって、上記処理が行われる。ここでいう「コンピュータシステム」とは、CPU及び各種メモリやOS、周辺機器等のハードウェアを含むものである。
また、「コンピュータシステム」は、WWWシステムを利用している場合であれば、ホームページ提供環境(あるいは表示環境)も含むものとする。
【0146】
また、各ステップを実現するためのプログラムをコンピュータ読み取り可能な記録媒体に記録して、また、この機能を実現するためのプログラムをコンピュータ読み取り可能な記録媒体に記録して、この記録媒体に記録されたプログラムをコンピュータシステムに読み込ませ、実行することにより、検出対象物の位置情報の推定値を算出する処理を行ってもよい。また、「コンピュータ読み取り可能な記録媒体」とは、フレキシブルディスク、光磁気ディスク、ROM、フラッシュメモリ等の書き込み可能な不揮発性メモリ、CD−ROM等の可搬媒体、コンピュータシステムに内蔵されるハードディスク等の記憶装置のことをいう。
【0147】
さらに「コンピュータ読み取り可能な記録媒体」とは、インターネット等のネットワークや電話回線等の通信回線を介してプログラムが送信された場合のサーバやクライアントとなるコンピュータシステム内部の揮発性メモリ(例えばDRAM(Dynamic Random Access Memory))のように、一定時間プログラムを保持しているものも含むものとする。
【0148】
また、上記プログラムは、このプログラムを記憶装置等に格納したコンピュータシステムから、伝送媒体を介して、あるいは、伝送媒体中の伝送波により他のコンピュータシステムに伝送されてもよい。ここで、プログラムを伝送する「伝送媒体」は、インターネット等のネットワーク(通信網)や電話回線等の通信回線(通信線)のように情報を伝送する機能を有する媒体のことをいう。また、上記プログラムは、前述した機能の一部を実現するためのものであっても良い。さらに、前述した機能をコンピュータシステムに既に記録されているプログラムとの組合せで実現できるもの、いわゆる差分ファイル(差分プログラム)であっても良い。
【符号の説明】
【0149】
100 RFIDタグ
113 アンテナ
120、230、520 制御部
130、240、330、530 記憶部
200 ポータブル基地局
200A 測位基地局
210 第1通信部
220 第2通信部
231 位置推定部
242、331 基地局位置データベース
243、332、532 タグ位置データベース
270 自己測位部
280 第3通信部
300 測位サーバ
310 通信部
320 位置推定部
400 アクセスポイント
500 携帯端末装置
510 通信部
531 地図データ
540 操作部
550 表示部
600 ネットワーク
700 被災地
【特許請求の範囲】
【請求項1】
通信タグと、被災地に設置される複数の可搬型の基地局と、測位装置から成り、
前記通信タグは、
インパルス波形によりデータの送受信が行われる第1の無線通信方式により通信を行うタグ通信部と、
前記タグ通信部により通信相手の前記基地局に対してタグ識別子を送信させるタグ制御部を備え、
前記基地局は、
前記第1の無線通信方式により通信を行う第1通信部と、
第2の無線通信方式による無線通信を経由して前記測位装置と通信するための第2通信部と、
前記第1通信部による前記通信タグとの通信に応じて、当該通信タグの位置推定に利用する所定のパラメータと当該通信タグから送信されたタグ識別子とを対応付けて生成した位置パラメータ情報を、前記第2通信部により前記測位装置に対して送信させるための制御を行う基地局制御部とを備え、
前記測位装置は、
前記基地局から当該測位装置に送信された位置パラメータ情報と、当該位置パラメータ情報の送信元基地局の位置に基づいて、通信タグごとの位置を推定し、通信タグごとの推定位置情報を記憶部に記憶させる測位制御部を備える
ことを特徴とする被災者救助支援システム。
【請求項2】
前記基地局は、自己の位置を測定する自己測位部をさらに備え、
前記基地局制御部は、前記自己位置測位部により測定された自己の位置を、前記第2通信部により前記測位装置に送信させる
ことを特徴とする請求項1に記載の被災者救助支援システム。
【請求項3】
1以上の携帯端末装置をさらに備え、
当該携帯端末装置は、
無線通信を経由して前記測位装置と通信する端末通信部と、
前記端末通信部により前記測位装置の記憶部に記憶される前記通信タグごとの推定位置情報を受信させ、当該受信された推定位置情報が示す前記通信タグの位置を表示させる端末制御部とを備える
ことを特徴とする請求項1または請求項2に記載の被災者救助支援システム。
【請求項4】
前記基地局は、他の基地局と第3の無線通信方式により通信を行う第3通信部をさらに備え、
前記基地局制御部は、自己が生成した前記位置パラメータ情報と前記第3通信部により他の基地局から受信した前記位置パラメータ情報を、前記第2通信部により前記測位装置に対して送信させるとともに、前記第3通信部により他の基地局に対して送信させるための制御を行う
ことを特徴とする請求項1乃至請求項3のいずれかに記載の被災者救助支援システム。
【請求項5】
前記基地局制御部は、自己が生成した前記位置パラメータ情報と前記第3通信部により他の基地局から受信した前記位置パラメータ情報を、前記測位装置を送信先として指定して前記第3通信部により送信させ、
前記測位装置は、前記第3の無線通信方式に対応する測位通信部を備えるとともに、前記測位制御部は、前記基地局から送信された位置パラメータ情報を前記測位通信部により受信させる
ことを特徴とする請求項1乃至請求項4のいずれかに記載の被災者救助支援システム。
【請求項6】
前記測位制御部は、前記記憶部に記憶される通信タグごとの推定位置情報を前記測位通信部により前記基地局に送信させ、
前記基地局制御部は、前記第3通信部により受信した通信タグごとの推定位置情報を保持するとともに、前記第3通信部により他の基地局に送信させ、
前記携帯端末装置は、前記基地局と通信を行う基地局対応通信部をさらに備え、前記端末制御部は、当該基地局対応通信部により基地局に保持されている前記通信タグごとの推定位置情報を受信させ、当該受信された推定位置情報が示す前記通信タグの位置を表示させることを特徴とする請求項3および請求項5に記載の被災者救助支援システム。
【請求項7】
前記基地局制御部は、前記第3通信部に実行させる他の基地局との通信と、当該第3通信部に代えて前記第1通信部に実行させる他の基地局との通信とで切り替えを行う
ことを特徴とする請求項4乃至請求項6に記載の被災者救助支援システム。
【請求項8】
前記基地局制御部は、
前記第1通信部による通信について、所定時間により前記通信タグに対して呼出信号を送信する呼出モードと、当該呼出モードに続けて所定時間により前記通信タグからの送信信号を受信するタグ信号受信モードを繰り返し実行させ、
前記タグ制御部は、前記タグ通信部による通信について、所定時間により上記呼出信号を受信するための呼出信号受信モードにおいて呼出信号が受信されない場合には、当該呼出信号受信モードに続けて設定した所定時間により通信動作を休止させる休止モードの後に上記呼出信号受信モードを再度設定し、上記呼出信号受信モードにおいて呼出信号が受信された場合には、当該呼出信号受信モードに続けて、所定時間により前記タグ識別子を送信する送信モードの後に上記呼出信号受信モードを設定する
ことを特徴とする請求項1乃至請求項7のいずれかに記載の被災者救助支援システム。
【請求項9】
前記基地局制御部は、
前記第1通信部による通信について、前記通信タグからの送信信号を受信する受信モードを継続して設定し、
前記タグ制御部は、
前記タグ通信部による通信について、所定時間により通信動作を休止させる休止モードと、当該休止モードに続けて所定時間により前記タグ識別子を送信する送信モードを繰り返し実行させる
ことを特徴とする請求項1乃至請求項7のいずれかに記載の被災者救助支援システム。
【請求項10】
通信タグと、被災地に設置される複数の可搬型の基地局と、測位装置から成る情報処理システムにおける情報処理方法であって、
前記通信タグにおいて、インパルス波形によりデータの送受信が行われる第1の無線通信方式により通信を行うタグ通信部により通信相手の前記基地局に対してタグ識別子を送信させるタグ制御ステップと、
前記基地局において、前記第1の無線通信方式により通信を行う第1通信部による前記通信タグとの通信に応じて、当該通信タグの位置推定に利用する所定のパラメータと当該通信タグから送信されたタグ識別子とを対応付けて生成した位置パラメータ情報を、第2の無線通信方式による通信を行う前記第2通信部により前記測位装置に対して送信させるための制御を行う基地局制御ステップと、
前記測位装置において、前記基地局から当該測位装置に送信された位置パラメータ情報と、当該位置パラメータ情報の送信元基地局の位置に基づいて、通信タグごとの位置を推定し、通信タグごとの推定位置情報を記憶部に記憶させる測位制御ステップとを備える
ことを特徴とする情報処理方法。
【請求項1】
通信タグと、被災地に設置される複数の可搬型の基地局と、測位装置から成り、
前記通信タグは、
インパルス波形によりデータの送受信が行われる第1の無線通信方式により通信を行うタグ通信部と、
前記タグ通信部により通信相手の前記基地局に対してタグ識別子を送信させるタグ制御部を備え、
前記基地局は、
前記第1の無線通信方式により通信を行う第1通信部と、
第2の無線通信方式による無線通信を経由して前記測位装置と通信するための第2通信部と、
前記第1通信部による前記通信タグとの通信に応じて、当該通信タグの位置推定に利用する所定のパラメータと当該通信タグから送信されたタグ識別子とを対応付けて生成した位置パラメータ情報を、前記第2通信部により前記測位装置に対して送信させるための制御を行う基地局制御部とを備え、
前記測位装置は、
前記基地局から当該測位装置に送信された位置パラメータ情報と、当該位置パラメータ情報の送信元基地局の位置に基づいて、通信タグごとの位置を推定し、通信タグごとの推定位置情報を記憶部に記憶させる測位制御部を備える
ことを特徴とする被災者救助支援システム。
【請求項2】
前記基地局は、自己の位置を測定する自己測位部をさらに備え、
前記基地局制御部は、前記自己位置測位部により測定された自己の位置を、前記第2通信部により前記測位装置に送信させる
ことを特徴とする請求項1に記載の被災者救助支援システム。
【請求項3】
1以上の携帯端末装置をさらに備え、
当該携帯端末装置は、
無線通信を経由して前記測位装置と通信する端末通信部と、
前記端末通信部により前記測位装置の記憶部に記憶される前記通信タグごとの推定位置情報を受信させ、当該受信された推定位置情報が示す前記通信タグの位置を表示させる端末制御部とを備える
ことを特徴とする請求項1または請求項2に記載の被災者救助支援システム。
【請求項4】
前記基地局は、他の基地局と第3の無線通信方式により通信を行う第3通信部をさらに備え、
前記基地局制御部は、自己が生成した前記位置パラメータ情報と前記第3通信部により他の基地局から受信した前記位置パラメータ情報を、前記第2通信部により前記測位装置に対して送信させるとともに、前記第3通信部により他の基地局に対して送信させるための制御を行う
ことを特徴とする請求項1乃至請求項3のいずれかに記載の被災者救助支援システム。
【請求項5】
前記基地局制御部は、自己が生成した前記位置パラメータ情報と前記第3通信部により他の基地局から受信した前記位置パラメータ情報を、前記測位装置を送信先として指定して前記第3通信部により送信させ、
前記測位装置は、前記第3の無線通信方式に対応する測位通信部を備えるとともに、前記測位制御部は、前記基地局から送信された位置パラメータ情報を前記測位通信部により受信させる
ことを特徴とする請求項1乃至請求項4のいずれかに記載の被災者救助支援システム。
【請求項6】
前記測位制御部は、前記記憶部に記憶される通信タグごとの推定位置情報を前記測位通信部により前記基地局に送信させ、
前記基地局制御部は、前記第3通信部により受信した通信タグごとの推定位置情報を保持するとともに、前記第3通信部により他の基地局に送信させ、
前記携帯端末装置は、前記基地局と通信を行う基地局対応通信部をさらに備え、前記端末制御部は、当該基地局対応通信部により基地局に保持されている前記通信タグごとの推定位置情報を受信させ、当該受信された推定位置情報が示す前記通信タグの位置を表示させることを特徴とする請求項3および請求項5に記載の被災者救助支援システム。
【請求項7】
前記基地局制御部は、前記第3通信部に実行させる他の基地局との通信と、当該第3通信部に代えて前記第1通信部に実行させる他の基地局との通信とで切り替えを行う
ことを特徴とする請求項4乃至請求項6に記載の被災者救助支援システム。
【請求項8】
前記基地局制御部は、
前記第1通信部による通信について、所定時間により前記通信タグに対して呼出信号を送信する呼出モードと、当該呼出モードに続けて所定時間により前記通信タグからの送信信号を受信するタグ信号受信モードを繰り返し実行させ、
前記タグ制御部は、前記タグ通信部による通信について、所定時間により上記呼出信号を受信するための呼出信号受信モードにおいて呼出信号が受信されない場合には、当該呼出信号受信モードに続けて設定した所定時間により通信動作を休止させる休止モードの後に上記呼出信号受信モードを再度設定し、上記呼出信号受信モードにおいて呼出信号が受信された場合には、当該呼出信号受信モードに続けて、所定時間により前記タグ識別子を送信する送信モードの後に上記呼出信号受信モードを設定する
ことを特徴とする請求項1乃至請求項7のいずれかに記載の被災者救助支援システム。
【請求項9】
前記基地局制御部は、
前記第1通信部による通信について、前記通信タグからの送信信号を受信する受信モードを継続して設定し、
前記タグ制御部は、
前記タグ通信部による通信について、所定時間により通信動作を休止させる休止モードと、当該休止モードに続けて所定時間により前記タグ識別子を送信する送信モードを繰り返し実行させる
ことを特徴とする請求項1乃至請求項7のいずれかに記載の被災者救助支援システム。
【請求項10】
通信タグと、被災地に設置される複数の可搬型の基地局と、測位装置から成る情報処理システムにおける情報処理方法であって、
前記通信タグにおいて、インパルス波形によりデータの送受信が行われる第1の無線通信方式により通信を行うタグ通信部により通信相手の前記基地局に対してタグ識別子を送信させるタグ制御ステップと、
前記基地局において、前記第1の無線通信方式により通信を行う第1通信部による前記通信タグとの通信に応じて、当該通信タグの位置推定に利用する所定のパラメータと当該通信タグから送信されたタグ識別子とを対応付けて生成した位置パラメータ情報を、第2の無線通信方式による通信を行う前記第2通信部により前記測位装置に対して送信させるための制御を行う基地局制御ステップと、
前記測位装置において、前記基地局から当該測位装置に送信された位置パラメータ情報と、当該位置パラメータ情報の送信元基地局の位置に基づいて、通信タグごとの位置を推定し、通信タグごとの推定位置情報を記憶部に記憶させる測位制御ステップとを備える
ことを特徴とする情報処理方法。
【図1】


【図2】
【図3】
【図4】
【図5】

【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【公開番号】特開2013−3047(P2013−3047A)
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願番号】特願2011−136482(P2011−136482)
【出願日】平成23年6月20日(2011.6.20)
【出願人】(397065136)株式会社横須賀テレコムリサーチパーク (28)
【Fターム(参考)】
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願日】平成23年6月20日(2011.6.20)
【出願人】(397065136)株式会社横須賀テレコムリサーチパーク (28)
【Fターム(参考)】
[ Back to top ]