
被覆材料噴霧器およびそうした噴霧器に被覆材料を再供給する方法
本発明のスプレーガン(1)は本体(11)を備えておりかつ本体(11)の近位部(11.1)に収容されており、タンク(10)が主軸線(X10)に沿って延在している。またスプレーガンは、本体(11)の遠位部(11.2)において、通常、噴霧方向(Y50)に被覆材料をスプレーするよう構成された噴霧部材(51)を有する噴霧手段(5)を備える。噴霧方向(Y50)とタンクの主軸線(X10)とは収束するようになっている。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、被覆される物品へ向けて被覆材料をスプレーするためにロボットによって移動させられるよう構成された噴霧器に関するものである。本発明は、また、被覆材料をそうした噴霧器に再供給するための方法に関するものである。「被覆材料」との語は、下塗り剤、塗料またはニスなどの液体材料を意味するよう使用される。
【背景技術】
【0002】
特許文献1には、被覆される物品に対して噴霧器を移動させる多軸ロボットの関節に固定された本体を備える噴霧器が開示されている。当該文献に開示された被覆される物品は、コンベヤによって運ばれる車体である。当該噴霧器はまた本体の近位部に収容される被覆材料貯留部を有する。貯留部は噴霧器の軸線と一致する主軸線に沿って延在する円筒形状を有する。ベルカップの形態のタービンおよび噴霧部材が本体内に取り付けられている。特許文献1の図1および図2を比較すると明らかなように、噴霧部材は、被覆材料を噴霧器およびその貯留部の主軸線が延在するスプレー方向に被覆材料を実質的にスプレーする。言い換えると、貯留部の主軸線は、スプレー方向と同一直線上にある。
【0003】
ゆえに上記噴霧器は、その機敏性(つまりそのアクセスが困難な、特に車両の内側における領域への到達に関する性質)を制限する細長形状を有する。
【0004】
加えて、接続ダクトの長さおよび細さならびに供給ダクトの長さおよび細さは、溶剤の流量を低減し得る大きなヘッド損失をもたらし、それによってクリーニング工程が鈍化する。明らかにヘッド損失の低いダクトが、噴霧器をクリーニングする際の排出物を集めるために必要とされている。したがって従来の塗料スプレー設備においてクリーニング工程は約20秒かかり、約25センチメートルの三乗(cm3)の塗料損失のためにリンスを行うようになっている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】仏国特許出願公開第2 887 474号明細書
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明の特有の課題は、ロボットを用いて、機敏であり、コンパクトでありかつ操作が簡単な噴霧器を提供することによって上記問題点を解消することである。
【課題を解決するための手段】
【0007】
このため、本発明は、被覆される物品に向けて被覆材料をスプレーするための噴霧器を提供する。当該噴霧器は:
・噴霧器をロボットに固定するためのフランジを備える本体であって、ロボットおよび/またはフランジが、その周囲で噴霧器が被覆される物品に対して移動するよう構成された端部軸線を規定する本体と;
・本体の近位部内に収容されかつ主軸線に沿って延在する被覆材料貯留部と;
・被覆材料をスプレーするための噴霧手段であって、この手段は本体の遠位部に配置されており、実質的にスプレー方向に被覆材料をスプレーするよう構成された噴霧部材を有する、噴霧手段と;
を備える。
【0008】
当該噴霧器は、スプレー方向と貯留部の主軸線とが収束していることを特徴とする。
【0009】
本発明の他の有利な、ただし付加的な特徴部によれば、以下の単独のあるいは以下の技術的に可能な組み合わせられたものが得られる:
・貯留部の主軸線とスプレー方向との間の角度は、50°から100°の範囲内にあり、好ましくは90°に等しい。
・端部軸線は、スプレー方向とともに、110°から130°の範囲内にありかつ好ましくは120°に等しい角度を形成する。
・噴霧器の重心と端部軸線との間の距離は、80ミリメータ(mm)未満となるよう、好ましくは20mm未満となるように選択されている。
・スプレー方向に測定した噴霧器の高さは、450mm未満、好ましくは400mm未満となるよう選択されている。
・噴霧器は、被覆材料サーキットへの接続のための少なくとも1つのオリフィスを有しており、オリフィスは、噴霧器のドッキング面上に配置されている。
・噴霧器は、また、オリフィスを貯留部に接続するための接続ダクトを有しており、接続ダクトは50mm以下の長さを有する。
・噴霧器は、噴霧器を通る被覆材料の流れおよびクリーニング材料の流れを制御するためにバルブをさらに有しており、バルブは接続ダクトの一部を形成している。
・噴霧手段は、噴霧部材への供給のための供給ダクトを有しており、供給ダクトは、貯留部から噴霧部材へ延在しており、供給ダクトは、300mm以下の長さと、5mm以下の、好ましくは4mm以下の最大直径とを有する。
・貯留部は、噴霧手段へ向かって被覆材料を押し出すためのピストンを有しており、かつ噴霧器はまた、主軸線に沿ってピストンを移動させるためのアクチュエータを有しており、アクチュエータは、貯留部とフランジとの間で本体内に収容されている。
・貯留部は、円状基部を有する円筒部の形状でありかつ200cm3から1000cm3の範囲にある容積のものであり、かつ貯留部の円筒部の直径は、50mmから120mmの範囲内にあり、好ましくは101mmと等しい。
・噴霧手段は、スプレー方向と実質的に一致する回転軸線の周囲で回転するよう噴霧部材を駆動するための回転駆動手段を有する。
【0010】
本発明は、上述したように規定された噴霧器に噴霧材料を再供給する方法も提供する。この方法は、以下のステップ、すなわち、
a)供給ダクトを通してかつ噴霧部材を通して、貯留部内に残る被覆材料をすべて除去するステップと;
b)クリーニング材料を貯留部へかつクリーニング用ダクトへ流入させるようバルブを開放し、すべてのクリーニング材料を、噴霧部材を介して貯留部から下流へ流動させるステップと;
c)貯留部が新しい被覆材料で満たされる様式で、接続ダクトへ被覆材料を流入させるようバルブを開放するステップと;
を含む。
【0011】
図面を参照して非限定的な例示として与えられる以下の説明から本発明はよりよく理解されかつその利点も明らかとなる。
【図面の簡単な説明】
【0012】
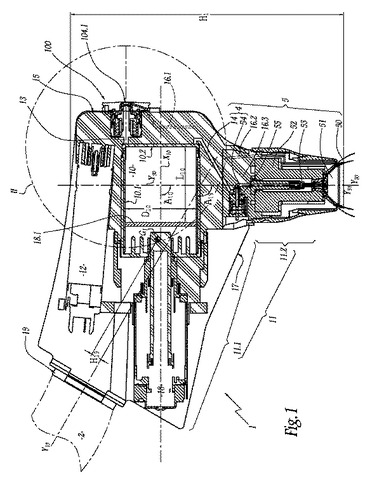
【図1】本発明の噴霧器の断面図である。
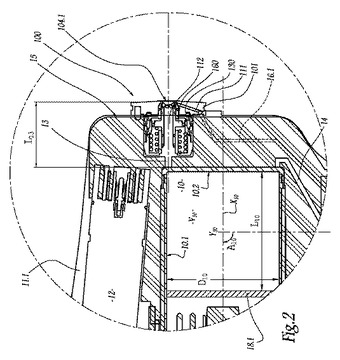
【図2】図1の細部IIの断面図である。
【発明を実施するための形態】
【0013】
図1には、本体11、貯留部10、および噴霧手段5を含む噴霧器1を示す。噴霧器1は、塗料、下塗り剤、またはニスなどの液体材料を車体などの被覆される物品に向けてスプレーするよう構成されている。貯留部10の機能は、スプレーされる材料を収容することである。
【0014】
本体11は、多軸線タイプのロボット2に固定するための手段を備える。ロボット2のケーシングが図1において一点鎖線で示されている。ロボット2は、被覆される物品に対して噴霧器1を移動させるよう構成されている。噴霧器1をロボット2に取り付けるために、本体11はこの例においてはカラー形状のフランジ19を備える。噴霧器1をロボット2に固定するための手段は、フランジ19で終端をなすネジのセットを備える。フランジ19はロボット2と噴霧器1との間の境界に存在する。特にフランジは、本体をロボットに連結でき、それによって噴霧器のための基部としての機能を発揮できる限りにおいては、さまざまな形状を有することができる。
【0015】
フランジ19は、その周囲で噴霧器1が被覆される物品に対して移動する端部軸線Y19を規定する。端部軸線Y19は、噴霧器1の手前でロボット2の終端の軸線と一致するため「端部」と記載される。ロボット2が多軸線ロボットである場合、ロボット2は、噴霧器1の移動のために端部軸線Y19を含む少なくとも6つの軸線を有する。それゆえ図1および図2に示される実施形態においては端部軸線Y19はフランジ19およびロボット2によって規定されている。代替的には、端部軸線は、フランジのみではなくロボットのみによって規定されてもよい。
【0016】
本体11は、近位部11.1および遠位部11.2から形成される。貯留部10は近位部11.1を収容する、つまりそれは、本体11のケーシング17によって規定される容積内に組み込まれている。本件出願においては、「近位」および「遠位」との語はフランジ19に関連して使用されている。「近位」はフランジ19に相対的に近接した要素を示しており、これに対して「遠位」はフランジ19からより離れた要素を示す。
【0017】
貯留部10は、円筒状面10.1によってかつ円状基部10.2によって規定された円形円筒部の全体形状のものである。貯留部10は、図1において水平方向にある主軸線X10に沿って延在する。本明細書において示される容積V10は、貯留部10の最大容積に対応する。貯留部10は、100mmの直径D10と50mmから100mmの範囲内にある長さL10とを有する。貯留部10の容積V10は、約0.8リットル(l)、つまり約800cm3である。実際に直径D10は50mmから120mmの範囲内にあり、かつ容積V10は200cm3から10000cm3の範囲内にある。
【0018】
ディスク形状のピストン18.1が、後述するように貯留部10から噴霧手段5へ向かって被覆材料を放出するために、貯留部10内に配置されている。ピストン18.1は、主軸線X10に沿って並進移動するよう取り付けられている。さらに噴霧器1は、ピストン18.1を主軸線X10に沿って並進移動させるためのアクチュエータ18を含む。アクチュエータ18は、電気モータまたは他の同等のアクチュエータによって個性されていてもよい。アクチュエータ18は本体11の近位部11.1内において、第一に貯留部10によってかつ第二にフランジ19によって規定される空間内に収容されている。
【0019】
噴霧手段5は、噴霧部材を構成するベルカップ51と、回転軸線Y51の周囲でベルカップ51を回転させるための手段を形成するタービン52とを備える。噴霧手段5は、供給ダクト4の下流部54においてタービン52の中央キャビティ内に取り付けられた噴射部53と、噴射部53を介した、ひいてはベルカップ51にわたる流体の流れを制御する噴霧バルブ55とをさらに備える。
【0020】
塗料のスプレー中、噴霧バルブ55は供給ダクト4の下流部54を開放しており、それによって噴射部53を通してかつベルカップ51にわたって塗料を流出できるようになる。タービン52は、高速での回転状態でベルカップ51を駆動する。それ自体が公知なように、ベルカップ51は、微小な液滴となるよう塗料を噴射し、それゆえ霧状体50を形成する。霧状体50は、実質的に被覆される物品に到達するようスプレー方向Y50に従う。ベルカップ51は、実質的にスプレー方向Y50に塗料をスプレーするよう構成されている。ベルカップ1が円形に対称的なものであるため、霧状体50は、スプレー方向Y50の周囲で円形に対称的な放物面(paraboloid)の形状またはバレットの形状となっている。スプレー方向Y50は、実質的にベルカップ51の回転軸線Y51と一致している。
【0021】
スプレー手段5は、本体11の遠位部11.2に配置されている。遠位部11.2は、噴霧手段5を収容するケーシングを形成する。遠位部11.2は、貯留部10の位置において遠位部11.2に対して突出している。
【0022】
貯留部10の主軸線X10は、スプレー方向Y50に対して直交している、つまりそれはスプレー方向Y50と90°の角度A10を形成している。実際に、角度A10は50°から100°の範囲内にある。したがって主軸線X10とスプレー方向Y50は収束するようになる。
【0023】
本発明において、「収束する」との語は、同一直線上にもなく、一致もしておらず、平行でもない二つの方向を意味する。言い換えると主軸線X10とスプレー方向Y50とは、同一平面上にあり、「収束する」との語は、主軸線X10とスプレー方向Y50とが他の線と交わる直線であることを意味している。主軸線X10とスプレー方向Y50とは同一平面上にないときは、「収束する」との語は、スプレー方向Y50を含む主軸線X10に平行な平面における主軸線X10の直交突出部が、スプレー方向Y50に対して交わる直線であることを意味している。
【0024】
加えて、遠位部11.2は実質的にスプレー方向Y50に延在している。図1の平面における突出部において、端部軸線Y19はスプレー方向Y50と約120°の角度A19を形成する。実際に、角度A19は、110°から130°の間にある。そうした角度A19は、噴霧器1に対してより高いコンパクトさをもたらし、それゆえロボット2に対して良好な機敏性をもたらす。
【0025】
図2に示されるように、噴霧器1は、再供給ステーションの一部である塗料サーキット(図示せず)に接続するためのオリフィス104.1を有する。オリフィス104.1は、遠位部11.1のドッキング面15に配置されている。塗料および溶剤は、貯留部10の充填工程中および噴霧器1のクリーニング工程中のそれぞれにおいてオリフィス104.1を介して噴霧器1内へ流入する。
【0026】
また噴霧器1は、貯留部10に、より詳細にはその基部10.2にオリフィス104.1を接続するための接続ダクト13を含む。接続ダクト13は、基部10.2に対してかつドッキング面15に対して直線方向となりかつ垂直方向となる様式で遠位部11.1内に延在している。接続ダクト13は、主軸線X10に平行に測定した長さL13を有する。長さL13は約50mmである。実際に長さL13は100mm未満となっている。
【0027】
接続ダクト13は、噴霧器1内の塗料および溶剤の流れを制御するバルブ100の一部内に形成されている。より詳細には第2のダクト12が接続ダクト13の上流部を規定する。
【0028】
バルブ100は、本体101と、第1のダクト111と、別個の第2のダクト112とを有する。本体内およびダクト内を貯留部10の充填工程、スプレー工程およびクリーニング工程の間に使用される、塗料、溶剤および加圧空気から構成される流体が流動する。バルブ100は、また、第1の針130と第2の針160とを有する。これら針は、流体の流動を可能にするか、あるいは流体の流動を遮断するよう機能する。本体101は、第1の針130および第2の針160を収容する。加えて、第1の針130は第2の針160の実質的な部分を受容するよう適合された凹部を規定する。
【0029】
さらに、この例においては、供給ダクト4は、上流部14および下流部54からなり、かつ貯留部10の基部10.2からベルカップ51へ延在しており、上記供給ダクト4は、最小化が必要な約260mmの長さと、約4mmの最大直径とを有する。実際に供給ダクト4の長さは300mm以下でありかつその最大直径は5mm以下である。噴射部53は、3mmと同じくらいの直径を有する。噴射部53は、限定的なヘッドロス損失しかもたらさないよう、相対的に短い長さを有する。
【0030】
また噴霧器1は、バルブ100と噴霧手段5との間に延在するクリーニング用ダクト16.1を有する。クリーニング用ダクト16.1は、図1および図2に破線で概略的に示されている。クリーニング用ダクトは第1の下流部分16.2に対して、かつ第2の下流部分16.3に対して接続されている。第1の下流部分16.2は、ベルカップ51へ向かって開放されている。第2の下流部分16.3は、噴射部53へ向かって開放されている。
【0031】
クリーニング用ダクト16.1および下流部分16.2および16.3は、噴射部53およびベルカップ51の面をクリーニングしかつすすぐために、噴霧手段5に向かってかつその中に溶剤を流動させる。より詳細には、クリーニング工程は、汚損された表面上にある塗料の除去のために加圧空気流および溶剤流を用いる。
【0032】
バルブ100は特にコンパクトなものである。ダクト13の長さL13は相対的に短く、それによって、貯留部10のクリーニングおよび再供給工程の間の、廃棄される塗料および溶剤の消費量を最小化できる。
【0033】
噴霧器1に被覆材料、例えば塗料を再供給する方法は、まず貯留部10内に残存する塗料をすべて除去するステップからなる。そうした残存する塗料は第2の供給ダクト4を介してかつベルカップ51を介して除去される。
【0034】
続いてすべての溶剤を貯留部10内へ、クリーニング用ダクト16.1内へ、かつ下流部分16.2および16.3内へ向かって、溶剤が集められるベルキャップ51を介して貯留部10から下流へ流動させるためにバルブ100が開放される。そしてバルブ100は、貯留部10が新しい色調の塗料で満たされるように接続ダクト13へ塗料を流動させるために開放される。言い換えると、噴霧器1は、廃棄される塗料および廃棄される溶剤を集めるためのサーキットから解放可能である。
【0035】
加えて、噴霧器1の高さH1は、スプレー方向Y50に測定すると約390mmである。実際に噴霧器1の高さH1は、450mm以下、好ましくは400mm以下となるよう選択される。
【0036】
そうした高さH1は、噴霧器1およびロボット2についてアクセスが困難な領域へのアクセスを容易にしかつそこからの除去を容易にする。それは、ベルカップ51と被覆される物品との間の最小距離が静電気スプレーの間は約200mmとなるため有意義なものとなる。したがって、その主軸線X10がスプレー方向Y50に平行な状態の貯留部10の構成は、噴霧器1に良好なコンパクトさをもたらし、それゆえロボット2に良好な機敏性がもたらされる。「機敏性(agility)」との語は、アクセスが困難な領域(特に車体の内側)への到達に関する噴霧器1の性質およびロボット2の性質を意味するよう使用されている。
【0037】
等量に関して、噴霧器1の重心G1は、従来の噴霧器の重心に比べて端部軸線Y19により近接して位置する。図1に示される重心G1は、貯留部10が充填されたときの、実際にはスプレー工程中の噴霧器1の重心G1である。貯留部10が空の場合の重心は、相対的に重心G1に隣接している。なぜなら、貯留部10内に収容されると量の重量が噴霧器1の重量と比較しても無視できるものからである。
【0038】
重心G1と端部軸線Y19との間の距離H19は約10mmである。距離H19は、「最短距離にして」、つまり端部軸線Y19に対して直交した状態で測定したものである。実際に距離H19は、80mm未満、好ましくは20mm未満となるよう選択される。従来の噴霧器の重心は、通常、端部軸線から100mm以上離れて位置させられている。
【0039】
距離H19を伴うそうした重心G1のポジションは、端部軸線Y19の周囲での噴霧器1の内部のモーメントを最小化できる。
【0040】
したがって、ロボット2を作動させるのに必要な力を制限でき、それによって従来の噴霧器を備えるロボットに比べてロボット2をより高い加速性をもって作動させることができる。
【0041】
1 噴霧器
2 ロボット
4 供給ダクト
5 噴霧手段
10 貯留部
10.1 円筒部
10.2 円状基部
11 本体
11.1 近位部
11.2 遠位部
12 第2のダクト
13 接続ダクト
14 上流部
15 ドッキング面
16.1 クリーニング用ダクト
16.2 第1の下流部分
16.3 第2の下流部分
17 ケーシング
18 アクチュエータ
18.1 ピストン
19 フランジ
50 スプレー
51 ベルカップ
52 タービン
53 噴射部
54 下流部
55 噴霧バルブ
100 バルブ
101 バルブ本体
104.1 オリフィス
111 第1のダクト
112 第2のダクト
130 第1の針
160 第2の針
【技術分野】
【0001】
本発明は、被覆される物品へ向けて被覆材料をスプレーするためにロボットによって移動させられるよう構成された噴霧器に関するものである。本発明は、また、被覆材料をそうした噴霧器に再供給するための方法に関するものである。「被覆材料」との語は、下塗り剤、塗料またはニスなどの液体材料を意味するよう使用される。
【背景技術】
【0002】
特許文献1には、被覆される物品に対して噴霧器を移動させる多軸ロボットの関節に固定された本体を備える噴霧器が開示されている。当該文献に開示された被覆される物品は、コンベヤによって運ばれる車体である。当該噴霧器はまた本体の近位部に収容される被覆材料貯留部を有する。貯留部は噴霧器の軸線と一致する主軸線に沿って延在する円筒形状を有する。ベルカップの形態のタービンおよび噴霧部材が本体内に取り付けられている。特許文献1の図1および図2を比較すると明らかなように、噴霧部材は、被覆材料を噴霧器およびその貯留部の主軸線が延在するスプレー方向に被覆材料を実質的にスプレーする。言い換えると、貯留部の主軸線は、スプレー方向と同一直線上にある。
【0003】
ゆえに上記噴霧器は、その機敏性(つまりそのアクセスが困難な、特に車両の内側における領域への到達に関する性質)を制限する細長形状を有する。
【0004】
加えて、接続ダクトの長さおよび細さならびに供給ダクトの長さおよび細さは、溶剤の流量を低減し得る大きなヘッド損失をもたらし、それによってクリーニング工程が鈍化する。明らかにヘッド損失の低いダクトが、噴霧器をクリーニングする際の排出物を集めるために必要とされている。したがって従来の塗料スプレー設備においてクリーニング工程は約20秒かかり、約25センチメートルの三乗(cm3)の塗料損失のためにリンスを行うようになっている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】仏国特許出願公開第2 887 474号明細書
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明の特有の課題は、ロボットを用いて、機敏であり、コンパクトでありかつ操作が簡単な噴霧器を提供することによって上記問題点を解消することである。
【課題を解決するための手段】
【0007】
このため、本発明は、被覆される物品に向けて被覆材料をスプレーするための噴霧器を提供する。当該噴霧器は:
・噴霧器をロボットに固定するためのフランジを備える本体であって、ロボットおよび/またはフランジが、その周囲で噴霧器が被覆される物品に対して移動するよう構成された端部軸線を規定する本体と;
・本体の近位部内に収容されかつ主軸線に沿って延在する被覆材料貯留部と;
・被覆材料をスプレーするための噴霧手段であって、この手段は本体の遠位部に配置されており、実質的にスプレー方向に被覆材料をスプレーするよう構成された噴霧部材を有する、噴霧手段と;
を備える。
【0008】
当該噴霧器は、スプレー方向と貯留部の主軸線とが収束していることを特徴とする。
【0009】
本発明の他の有利な、ただし付加的な特徴部によれば、以下の単独のあるいは以下の技術的に可能な組み合わせられたものが得られる:
・貯留部の主軸線とスプレー方向との間の角度は、50°から100°の範囲内にあり、好ましくは90°に等しい。
・端部軸線は、スプレー方向とともに、110°から130°の範囲内にありかつ好ましくは120°に等しい角度を形成する。
・噴霧器の重心と端部軸線との間の距離は、80ミリメータ(mm)未満となるよう、好ましくは20mm未満となるように選択されている。
・スプレー方向に測定した噴霧器の高さは、450mm未満、好ましくは400mm未満となるよう選択されている。
・噴霧器は、被覆材料サーキットへの接続のための少なくとも1つのオリフィスを有しており、オリフィスは、噴霧器のドッキング面上に配置されている。
・噴霧器は、また、オリフィスを貯留部に接続するための接続ダクトを有しており、接続ダクトは50mm以下の長さを有する。
・噴霧器は、噴霧器を通る被覆材料の流れおよびクリーニング材料の流れを制御するためにバルブをさらに有しており、バルブは接続ダクトの一部を形成している。
・噴霧手段は、噴霧部材への供給のための供給ダクトを有しており、供給ダクトは、貯留部から噴霧部材へ延在しており、供給ダクトは、300mm以下の長さと、5mm以下の、好ましくは4mm以下の最大直径とを有する。
・貯留部は、噴霧手段へ向かって被覆材料を押し出すためのピストンを有しており、かつ噴霧器はまた、主軸線に沿ってピストンを移動させるためのアクチュエータを有しており、アクチュエータは、貯留部とフランジとの間で本体内に収容されている。
・貯留部は、円状基部を有する円筒部の形状でありかつ200cm3から1000cm3の範囲にある容積のものであり、かつ貯留部の円筒部の直径は、50mmから120mmの範囲内にあり、好ましくは101mmと等しい。
・噴霧手段は、スプレー方向と実質的に一致する回転軸線の周囲で回転するよう噴霧部材を駆動するための回転駆動手段を有する。
【0010】
本発明は、上述したように規定された噴霧器に噴霧材料を再供給する方法も提供する。この方法は、以下のステップ、すなわち、
a)供給ダクトを通してかつ噴霧部材を通して、貯留部内に残る被覆材料をすべて除去するステップと;
b)クリーニング材料を貯留部へかつクリーニング用ダクトへ流入させるようバルブを開放し、すべてのクリーニング材料を、噴霧部材を介して貯留部から下流へ流動させるステップと;
c)貯留部が新しい被覆材料で満たされる様式で、接続ダクトへ被覆材料を流入させるようバルブを開放するステップと;
を含む。
【0011】
図面を参照して非限定的な例示として与えられる以下の説明から本発明はよりよく理解されかつその利点も明らかとなる。
【図面の簡単な説明】
【0012】
【図1】本発明の噴霧器の断面図である。
【図2】図1の細部IIの断面図である。
【発明を実施するための形態】
【0013】
図1には、本体11、貯留部10、および噴霧手段5を含む噴霧器1を示す。噴霧器1は、塗料、下塗り剤、またはニスなどの液体材料を車体などの被覆される物品に向けてスプレーするよう構成されている。貯留部10の機能は、スプレーされる材料を収容することである。
【0014】
本体11は、多軸線タイプのロボット2に固定するための手段を備える。ロボット2のケーシングが図1において一点鎖線で示されている。ロボット2は、被覆される物品に対して噴霧器1を移動させるよう構成されている。噴霧器1をロボット2に取り付けるために、本体11はこの例においてはカラー形状のフランジ19を備える。噴霧器1をロボット2に固定するための手段は、フランジ19で終端をなすネジのセットを備える。フランジ19はロボット2と噴霧器1との間の境界に存在する。特にフランジは、本体をロボットに連結でき、それによって噴霧器のための基部としての機能を発揮できる限りにおいては、さまざまな形状を有することができる。
【0015】
フランジ19は、その周囲で噴霧器1が被覆される物品に対して移動する端部軸線Y19を規定する。端部軸線Y19は、噴霧器1の手前でロボット2の終端の軸線と一致するため「端部」と記載される。ロボット2が多軸線ロボットである場合、ロボット2は、噴霧器1の移動のために端部軸線Y19を含む少なくとも6つの軸線を有する。それゆえ図1および図2に示される実施形態においては端部軸線Y19はフランジ19およびロボット2によって規定されている。代替的には、端部軸線は、フランジのみではなくロボットのみによって規定されてもよい。
【0016】
本体11は、近位部11.1および遠位部11.2から形成される。貯留部10は近位部11.1を収容する、つまりそれは、本体11のケーシング17によって規定される容積内に組み込まれている。本件出願においては、「近位」および「遠位」との語はフランジ19に関連して使用されている。「近位」はフランジ19に相対的に近接した要素を示しており、これに対して「遠位」はフランジ19からより離れた要素を示す。
【0017】
貯留部10は、円筒状面10.1によってかつ円状基部10.2によって規定された円形円筒部の全体形状のものである。貯留部10は、図1において水平方向にある主軸線X10に沿って延在する。本明細書において示される容積V10は、貯留部10の最大容積に対応する。貯留部10は、100mmの直径D10と50mmから100mmの範囲内にある長さL10とを有する。貯留部10の容積V10は、約0.8リットル(l)、つまり約800cm3である。実際に直径D10は50mmから120mmの範囲内にあり、かつ容積V10は200cm3から10000cm3の範囲内にある。
【0018】
ディスク形状のピストン18.1が、後述するように貯留部10から噴霧手段5へ向かって被覆材料を放出するために、貯留部10内に配置されている。ピストン18.1は、主軸線X10に沿って並進移動するよう取り付けられている。さらに噴霧器1は、ピストン18.1を主軸線X10に沿って並進移動させるためのアクチュエータ18を含む。アクチュエータ18は、電気モータまたは他の同等のアクチュエータによって個性されていてもよい。アクチュエータ18は本体11の近位部11.1内において、第一に貯留部10によってかつ第二にフランジ19によって規定される空間内に収容されている。
【0019】
噴霧手段5は、噴霧部材を構成するベルカップ51と、回転軸線Y51の周囲でベルカップ51を回転させるための手段を形成するタービン52とを備える。噴霧手段5は、供給ダクト4の下流部54においてタービン52の中央キャビティ内に取り付けられた噴射部53と、噴射部53を介した、ひいてはベルカップ51にわたる流体の流れを制御する噴霧バルブ55とをさらに備える。
【0020】
塗料のスプレー中、噴霧バルブ55は供給ダクト4の下流部54を開放しており、それによって噴射部53を通してかつベルカップ51にわたって塗料を流出できるようになる。タービン52は、高速での回転状態でベルカップ51を駆動する。それ自体が公知なように、ベルカップ51は、微小な液滴となるよう塗料を噴射し、それゆえ霧状体50を形成する。霧状体50は、実質的に被覆される物品に到達するようスプレー方向Y50に従う。ベルカップ51は、実質的にスプレー方向Y50に塗料をスプレーするよう構成されている。ベルカップ1が円形に対称的なものであるため、霧状体50は、スプレー方向Y50の周囲で円形に対称的な放物面(paraboloid)の形状またはバレットの形状となっている。スプレー方向Y50は、実質的にベルカップ51の回転軸線Y51と一致している。
【0021】
スプレー手段5は、本体11の遠位部11.2に配置されている。遠位部11.2は、噴霧手段5を収容するケーシングを形成する。遠位部11.2は、貯留部10の位置において遠位部11.2に対して突出している。
【0022】
貯留部10の主軸線X10は、スプレー方向Y50に対して直交している、つまりそれはスプレー方向Y50と90°の角度A10を形成している。実際に、角度A10は50°から100°の範囲内にある。したがって主軸線X10とスプレー方向Y50は収束するようになる。
【0023】
本発明において、「収束する」との語は、同一直線上にもなく、一致もしておらず、平行でもない二つの方向を意味する。言い換えると主軸線X10とスプレー方向Y50とは、同一平面上にあり、「収束する」との語は、主軸線X10とスプレー方向Y50とが他の線と交わる直線であることを意味している。主軸線X10とスプレー方向Y50とは同一平面上にないときは、「収束する」との語は、スプレー方向Y50を含む主軸線X10に平行な平面における主軸線X10の直交突出部が、スプレー方向Y50に対して交わる直線であることを意味している。
【0024】
加えて、遠位部11.2は実質的にスプレー方向Y50に延在している。図1の平面における突出部において、端部軸線Y19はスプレー方向Y50と約120°の角度A19を形成する。実際に、角度A19は、110°から130°の間にある。そうした角度A19は、噴霧器1に対してより高いコンパクトさをもたらし、それゆえロボット2に対して良好な機敏性をもたらす。
【0025】
図2に示されるように、噴霧器1は、再供給ステーションの一部である塗料サーキット(図示せず)に接続するためのオリフィス104.1を有する。オリフィス104.1は、遠位部11.1のドッキング面15に配置されている。塗料および溶剤は、貯留部10の充填工程中および噴霧器1のクリーニング工程中のそれぞれにおいてオリフィス104.1を介して噴霧器1内へ流入する。
【0026】
また噴霧器1は、貯留部10に、より詳細にはその基部10.2にオリフィス104.1を接続するための接続ダクト13を含む。接続ダクト13は、基部10.2に対してかつドッキング面15に対して直線方向となりかつ垂直方向となる様式で遠位部11.1内に延在している。接続ダクト13は、主軸線X10に平行に測定した長さL13を有する。長さL13は約50mmである。実際に長さL13は100mm未満となっている。
【0027】
接続ダクト13は、噴霧器1内の塗料および溶剤の流れを制御するバルブ100の一部内に形成されている。より詳細には第2のダクト12が接続ダクト13の上流部を規定する。
【0028】
バルブ100は、本体101と、第1のダクト111と、別個の第2のダクト112とを有する。本体内およびダクト内を貯留部10の充填工程、スプレー工程およびクリーニング工程の間に使用される、塗料、溶剤および加圧空気から構成される流体が流動する。バルブ100は、また、第1の針130と第2の針160とを有する。これら針は、流体の流動を可能にするか、あるいは流体の流動を遮断するよう機能する。本体101は、第1の針130および第2の針160を収容する。加えて、第1の針130は第2の針160の実質的な部分を受容するよう適合された凹部を規定する。
【0029】
さらに、この例においては、供給ダクト4は、上流部14および下流部54からなり、かつ貯留部10の基部10.2からベルカップ51へ延在しており、上記供給ダクト4は、最小化が必要な約260mmの長さと、約4mmの最大直径とを有する。実際に供給ダクト4の長さは300mm以下でありかつその最大直径は5mm以下である。噴射部53は、3mmと同じくらいの直径を有する。噴射部53は、限定的なヘッドロス損失しかもたらさないよう、相対的に短い長さを有する。
【0030】
また噴霧器1は、バルブ100と噴霧手段5との間に延在するクリーニング用ダクト16.1を有する。クリーニング用ダクト16.1は、図1および図2に破線で概略的に示されている。クリーニング用ダクトは第1の下流部分16.2に対して、かつ第2の下流部分16.3に対して接続されている。第1の下流部分16.2は、ベルカップ51へ向かって開放されている。第2の下流部分16.3は、噴射部53へ向かって開放されている。
【0031】
クリーニング用ダクト16.1および下流部分16.2および16.3は、噴射部53およびベルカップ51の面をクリーニングしかつすすぐために、噴霧手段5に向かってかつその中に溶剤を流動させる。より詳細には、クリーニング工程は、汚損された表面上にある塗料の除去のために加圧空気流および溶剤流を用いる。
【0032】
バルブ100は特にコンパクトなものである。ダクト13の長さL13は相対的に短く、それによって、貯留部10のクリーニングおよび再供給工程の間の、廃棄される塗料および溶剤の消費量を最小化できる。
【0033】
噴霧器1に被覆材料、例えば塗料を再供給する方法は、まず貯留部10内に残存する塗料をすべて除去するステップからなる。そうした残存する塗料は第2の供給ダクト4を介してかつベルカップ51を介して除去される。
【0034】
続いてすべての溶剤を貯留部10内へ、クリーニング用ダクト16.1内へ、かつ下流部分16.2および16.3内へ向かって、溶剤が集められるベルキャップ51を介して貯留部10から下流へ流動させるためにバルブ100が開放される。そしてバルブ100は、貯留部10が新しい色調の塗料で満たされるように接続ダクト13へ塗料を流動させるために開放される。言い換えると、噴霧器1は、廃棄される塗料および廃棄される溶剤を集めるためのサーキットから解放可能である。
【0035】
加えて、噴霧器1の高さH1は、スプレー方向Y50に測定すると約390mmである。実際に噴霧器1の高さH1は、450mm以下、好ましくは400mm以下となるよう選択される。
【0036】
そうした高さH1は、噴霧器1およびロボット2についてアクセスが困難な領域へのアクセスを容易にしかつそこからの除去を容易にする。それは、ベルカップ51と被覆される物品との間の最小距離が静電気スプレーの間は約200mmとなるため有意義なものとなる。したがって、その主軸線X10がスプレー方向Y50に平行な状態の貯留部10の構成は、噴霧器1に良好なコンパクトさをもたらし、それゆえロボット2に良好な機敏性がもたらされる。「機敏性(agility)」との語は、アクセスが困難な領域(特に車体の内側)への到達に関する噴霧器1の性質およびロボット2の性質を意味するよう使用されている。
【0037】
等量に関して、噴霧器1の重心G1は、従来の噴霧器の重心に比べて端部軸線Y19により近接して位置する。図1に示される重心G1は、貯留部10が充填されたときの、実際にはスプレー工程中の噴霧器1の重心G1である。貯留部10が空の場合の重心は、相対的に重心G1に隣接している。なぜなら、貯留部10内に収容されると量の重量が噴霧器1の重量と比較しても無視できるものからである。
【0038】
重心G1と端部軸線Y19との間の距離H19は約10mmである。距離H19は、「最短距離にして」、つまり端部軸線Y19に対して直交した状態で測定したものである。実際に距離H19は、80mm未満、好ましくは20mm未満となるよう選択される。従来の噴霧器の重心は、通常、端部軸線から100mm以上離れて位置させられている。
【0039】
距離H19を伴うそうした重心G1のポジションは、端部軸線Y19の周囲での噴霧器1の内部のモーメントを最小化できる。
【0040】
したがって、ロボット2を作動させるのに必要な力を制限でき、それによって従来の噴霧器を備えるロボットに比べてロボット2をより高い加速性をもって作動させることができる。
【0041】
1 噴霧器
2 ロボット
4 供給ダクト
5 噴霧手段
10 貯留部
10.1 円筒部
10.2 円状基部
11 本体
11.1 近位部
11.2 遠位部
12 第2のダクト
13 接続ダクト
14 上流部
15 ドッキング面
16.1 クリーニング用ダクト
16.2 第1の下流部分
16.3 第2の下流部分
17 ケーシング
18 アクチュエータ
18.1 ピストン
19 フランジ
50 スプレー
51 ベルカップ
52 タービン
53 噴射部
54 下流部
55 噴霧バルブ
100 バルブ
101 バルブ本体
104.1 オリフィス
111 第1のダクト
112 第2のダクト
130 第1の針
160 第2の針
【特許請求の範囲】
【請求項1】
被覆される物品に向けて被覆材料をスプレーするための噴霧器(1)であって、
前記噴霧器は:
・前記噴霧器(1)をロボット(2)に固定するためのフランジ(19)を備える本体(11)であって、前記ロボット(2)および/またはフランジ(19)が、その周囲で前記噴霧器(1)が被覆される物品に対して移動するよう構成された端部軸線(Y19)を規定する、本体(11)と;
・前記本体(11)の近位部(11.1)内に収容されかつ主軸線(X10)に沿って延在する被覆材料貯留部(10)と;
・被覆材料をスプレーするための噴霧手段(5)であって、前記手段は前記本体(11)の遠位部(11.2)に配置されており、実質的にスプレー方向(Y50)に被覆材料をスプレーするよう構成された噴霧部材(51)を有する、噴霧手段(5)と;
を具備してなり、
前記スプレー方向(Y50)と前記貯留部(10)の前記主軸線(X10)とが収束していることを特徴とする噴霧器(1)。
【請求項2】
前記貯留部(10)の前記主軸線(X10)と前記スプレー方向(Y50)との間の角度(A10)は、50°から100°の範囲内にあり、好ましくは90°に等しいことを特徴とする請求項1に記載の噴霧器(1)。
【請求項3】
前記端部軸線(Y19)は、前記スプレー方向(Y50)とともに、110°から130°の範囲内にありかつ好ましくは120°に等しい角度(A19)を形成することを特徴とする請求項2に記載の噴霧器(1)。
【請求項4】
前記噴霧器(1)の重心(G1)と前記端部軸線(Y19)との間の距離(H19)は、80mm未満となるよう、好ましくは20mm未満となるように選択されていることを特徴とする請求項1ないし請求項3のいずれか一項に記載の噴霧器(1)。
【請求項5】
前記スプレー方向(Y50)に測定した前記噴霧器(1)の高さ(H1)は、450mm未満、好ましくは400mm未満となるよう選択されていることを特徴とする請求項1ないし請求項4のいずれか一項に記載の噴霧器(1)。
【請求項6】
被覆材料サーキットへの接続のための少なくとも1つのオリフィス(104.1)を有しており、前記オリフィス(104.1)は、前記噴霧器(1)のドッキング面(15)上に配置されており、かつ、
前記オリフィス(104.1)を前記貯留部(10)に接続するための接続ダクト(13)を有しており、前記接続ダクト(13)が50mm以下の長さ(L13)を有していることを特徴とする請求項1ないし請求項5のいずれか一項に記載の噴霧器(1)。
【請求項7】
前記噴霧器(1)を通る被覆材料の流れおよびクリーニング材料の流れを制御するためにバルブ(100)をさらに有しており、前記バルブ(100)は前記接続ダクト(13)の一部を形成していることを特徴とする請求項6に記載の噴霧器(1)。
【請求項8】
前記噴霧手段(5)は、前記噴霧部材(51)への供給のための供給ダクト(4)を有しており、前記供給ダクト(4)は、前記貯留部(10)から前記噴霧部材(51)へ延在しており、前記供給ダクトは、300mm以下の長さと、5mm以下の、好ましくは4mm以下の最大直径とを有することを特徴とする請求項1ないし請求項7のいずれか一項に記載の噴霧器(1)。
【請求項9】
前記貯留部(10)は、前記噴霧手段(5)へ向かって被覆材料を押し出すためのピストン(18.1)を有しており、かつ前記噴霧器(1)はまた、前記主軸線(X10)に沿って前記ピストン(18.1)を作動させるためのアクチュエータ(18)を有しており、前記アクチュエータ(18)は、前記貯留部(10)と前記フランジ(19)との間で前記本体(11)内に収容されていることを特徴とする請求項1ないし請求項8のいずれか一項に記載の噴霧器(1)。
【請求項10】
前記貯留部(10)は、円状基部(10.2)を有する円筒部(10.1)の形状でありかつ200cm3から1000cm3の範囲にある容積(V10)のものであり、かつ前記貯留部の前記円筒部(10.1)の直径(D10)は、50mmから120mmの範囲内にあり、好ましくは101mmに等しいことを特徴とする請求項1ないし請求項9のいずれか一項に記載の噴霧器(1)。
【請求項11】
前記噴霧手段(5)は、前記スプレー方向(Y50)と実質的に一致する回転軸線(Y51)の周囲で回転するよう前記噴霧部材(51)を駆動するための回転駆動手段(52)を有していることを特徴とする請求項1ないし請求項10のいずれか一項に記載の噴霧器(1)。
【請求項12】
請求項7に記載の噴霧器(1)に噴霧材料を再供給する方法であって、
前記方法は、
a)前記供給ダクト(4)を通してかつ前記噴霧部材(51)を通して、前記貯留部(10)内に残る被覆材料をすべて除去するステップと;
b)クリーニング材料を前記貯留部(10)へかつクリーニング用ダクト(16.1)へ流入させるよう前記バルブ(100)を開放し、すべてのクリーニング材料を前記噴霧部材(51)を介して前記貯留部(10)から下流へ流動させるステップと;
c)前記貯留部(10)が新しい被覆材料で満たされる様式で、前記接続ダクト(13)へ被覆材料を流入させるよう前記バルブ(100)を開放するステップと;
を具備することを特徴とする方法。
【請求項1】
被覆される物品に向けて被覆材料をスプレーするための噴霧器(1)であって、
前記噴霧器は:
・前記噴霧器(1)をロボット(2)に固定するためのフランジ(19)を備える本体(11)であって、前記ロボット(2)および/またはフランジ(19)が、その周囲で前記噴霧器(1)が被覆される物品に対して移動するよう構成された端部軸線(Y19)を規定する、本体(11)と;
・前記本体(11)の近位部(11.1)内に収容されかつ主軸線(X10)に沿って延在する被覆材料貯留部(10)と;
・被覆材料をスプレーするための噴霧手段(5)であって、前記手段は前記本体(11)の遠位部(11.2)に配置されており、実質的にスプレー方向(Y50)に被覆材料をスプレーするよう構成された噴霧部材(51)を有する、噴霧手段(5)と;
を具備してなり、
前記スプレー方向(Y50)と前記貯留部(10)の前記主軸線(X10)とが収束していることを特徴とする噴霧器(1)。
【請求項2】
前記貯留部(10)の前記主軸線(X10)と前記スプレー方向(Y50)との間の角度(A10)は、50°から100°の範囲内にあり、好ましくは90°に等しいことを特徴とする請求項1に記載の噴霧器(1)。
【請求項3】
前記端部軸線(Y19)は、前記スプレー方向(Y50)とともに、110°から130°の範囲内にありかつ好ましくは120°に等しい角度(A19)を形成することを特徴とする請求項2に記載の噴霧器(1)。
【請求項4】
前記噴霧器(1)の重心(G1)と前記端部軸線(Y19)との間の距離(H19)は、80mm未満となるよう、好ましくは20mm未満となるように選択されていることを特徴とする請求項1ないし請求項3のいずれか一項に記載の噴霧器(1)。
【請求項5】
前記スプレー方向(Y50)に測定した前記噴霧器(1)の高さ(H1)は、450mm未満、好ましくは400mm未満となるよう選択されていることを特徴とする請求項1ないし請求項4のいずれか一項に記載の噴霧器(1)。
【請求項6】
被覆材料サーキットへの接続のための少なくとも1つのオリフィス(104.1)を有しており、前記オリフィス(104.1)は、前記噴霧器(1)のドッキング面(15)上に配置されており、かつ、
前記オリフィス(104.1)を前記貯留部(10)に接続するための接続ダクト(13)を有しており、前記接続ダクト(13)が50mm以下の長さ(L13)を有していることを特徴とする請求項1ないし請求項5のいずれか一項に記載の噴霧器(1)。
【請求項7】
前記噴霧器(1)を通る被覆材料の流れおよびクリーニング材料の流れを制御するためにバルブ(100)をさらに有しており、前記バルブ(100)は前記接続ダクト(13)の一部を形成していることを特徴とする請求項6に記載の噴霧器(1)。
【請求項8】
前記噴霧手段(5)は、前記噴霧部材(51)への供給のための供給ダクト(4)を有しており、前記供給ダクト(4)は、前記貯留部(10)から前記噴霧部材(51)へ延在しており、前記供給ダクトは、300mm以下の長さと、5mm以下の、好ましくは4mm以下の最大直径とを有することを特徴とする請求項1ないし請求項7のいずれか一項に記載の噴霧器(1)。
【請求項9】
前記貯留部(10)は、前記噴霧手段(5)へ向かって被覆材料を押し出すためのピストン(18.1)を有しており、かつ前記噴霧器(1)はまた、前記主軸線(X10)に沿って前記ピストン(18.1)を作動させるためのアクチュエータ(18)を有しており、前記アクチュエータ(18)は、前記貯留部(10)と前記フランジ(19)との間で前記本体(11)内に収容されていることを特徴とする請求項1ないし請求項8のいずれか一項に記載の噴霧器(1)。
【請求項10】
前記貯留部(10)は、円状基部(10.2)を有する円筒部(10.1)の形状でありかつ200cm3から1000cm3の範囲にある容積(V10)のものであり、かつ前記貯留部の前記円筒部(10.1)の直径(D10)は、50mmから120mmの範囲内にあり、好ましくは101mmに等しいことを特徴とする請求項1ないし請求項9のいずれか一項に記載の噴霧器(1)。
【請求項11】
前記噴霧手段(5)は、前記スプレー方向(Y50)と実質的に一致する回転軸線(Y51)の周囲で回転するよう前記噴霧部材(51)を駆動するための回転駆動手段(52)を有していることを特徴とする請求項1ないし請求項10のいずれか一項に記載の噴霧器(1)。
【請求項12】
請求項7に記載の噴霧器(1)に噴霧材料を再供給する方法であって、
前記方法は、
a)前記供給ダクト(4)を通してかつ前記噴霧部材(51)を通して、前記貯留部(10)内に残る被覆材料をすべて除去するステップと;
b)クリーニング材料を前記貯留部(10)へかつクリーニング用ダクト(16.1)へ流入させるよう前記バルブ(100)を開放し、すべてのクリーニング材料を前記噴霧部材(51)を介して前記貯留部(10)から下流へ流動させるステップと;
c)前記貯留部(10)が新しい被覆材料で満たされる様式で、前記接続ダクト(13)へ被覆材料を流入させるよう前記バルブ(100)を開放するステップと;
を具備することを特徴とする方法。
【図1】

【図2】
【図2】
【公表番号】特表2012−511418(P2012−511418A)
【公表日】平成24年5月24日(2012.5.24)
【国際特許分類】
【出願番号】特願2011−540166(P2011−540166)
【出願日】平成21年12月8日(2009.12.8)
【国際出願番号】PCT/FR2009/052452
【国際公開番号】WO2010/067014
【国際公開日】平成22年6月17日(2010.6.17)
【出願人】(511080247)サム・テクノロジー (7)
【Fターム(参考)】
【公表日】平成24年5月24日(2012.5.24)
【国際特許分類】
【出願日】平成21年12月8日(2009.12.8)
【国際出願番号】PCT/FR2009/052452
【国際公開番号】WO2010/067014
【国際公開日】平成22年6月17日(2010.6.17)
【出願人】(511080247)サム・テクノロジー (7)
【Fターム(参考)】
[ Back to top ]