
被験者の体内の放射線源の位置標定
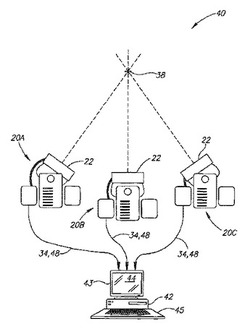
装置を位置標定するためのコンピュータ化システム40。システム40は、センサモジュール20とCPU42とを備える。医療装置に関連付けられた放射線源38は、放射性崩壊の形態で信号を生成する。モジュール20は装置に取り付けられた線源38からの信号を受けとることができる放射線検出器22を備える。モジュール20は出力信号34を生成する。CPU42は出力信号34を受けとり、出力34を線源38の位置に関する方向情報に変換する。
【発明の詳細な説明】
【技術分野】
【0001】
関連出願
本願は、米国特許法第119条(e)項に基づき、「Medical Navigation System Base on Differential Sensor」と称する2004年8月12日出願の米国特許仮出願第60/600725号、「Using a Catheter or Guidewire Tracking System」と称する2004年10月19日出願の第60/619792号、および「Using a Radioactive Source as the Tracked......」と称する2004年10月19日出願の第60/619897号の特典を主張し、それらの開示内容を参照によって本書に援用する。
【0002】
発明の分野
本発明は、例えば被験者の体内の電離放射線源の位置標定および追跡に関する。
【背景技術】
【0003】
体内追跡のための既存の技術は、腹腔鏡を使用する直接ビデオ撮像、蛍光X線透視法(連続または周期的X線撮像法による処置の実行)、電磁追跡、光学追跡、コンピュータ断層撮影(CT)追跡および超音波画像支援追跡を含む。これらの技術の一部は、電離放射線を明示的に回避する。蛍光X線透視法およびCTのような電離放射線を使用する技術は、充分な量の電離放射線を必要とするため、被験者および医療スタッフの放射線被曝が懸念される。
【0004】
心臓カテーテル法のような体内追跡を必要とする一部の用途は、追跡される医療装置がその中をナビゲートされる組織が頻繁に動くため、同時取得画像を必要とする。頭蓋内処置のような体内追跡を必要とする他の用途は、関連組織が比較的静止しているため、事前に取得した画像を使用するのにより適している。
【発明の開示】
【0005】
本発明の一部の実施形態の態様は、画像を生成することなく、任意選択的に被験者の身体の内部または付近のその位置を検出するために、線源からの電離放射線を使用することに関する。任意選択的に、線源は医療装置と一体的に形成されるか、あるいはそれに取り付けられる。医療装置は、器具、インプラント、ナビゲーション装置、および導管を含むが、それらに限定されない。
【0006】
本発明の例示的実施形態では、線源の位置は非撮像データ取得によって決定される。この明細書および付属の特許請求の範囲を目的として、語句「非撮像」とは、線源および解剖学的または他の非線源特徴を同一画像内に含む画像取得プロセスとは独立して取得されるデータを指す。
【0007】
任意選択的に、位置は、線源からの実効入射角に応じて放射線検出から結果的に得られる出力の検出可能な変化を生じる角感度を有するセンサを使用して決定される。実効入射角の感度が高ければ高いほど、速度および精度に関して位置決定の高い効率が達成される。±100ミリラジアン未満、任意選択的に±50ミリラジアン未満の角度範囲の実施形態を開示する。本発明の例示的実施形態では、放射線検出器および/またはシールドを移動させることによって、実効入射角に対するより高い感度を達成することができる。
【0008】
任意選択的に、電離放射線源は、0.01mCiないし0.5mCiの範囲の放射能を有する。任意選択的に、電離放射線源は0.1mCi未満の放射能を有する。任意選択的に、電離放射線源は約0.05mCiの放射能を有する。本発明の例示的実施形態では、患者(つまり短期被曝)および/または医療担当者(つまり長期被曝)に著しい健康リスクをもたらさない放射線源を使用することができる。
【0009】
任意選択的に、位置データのリフレッシュ速度は、位置情報が一時的に追跡される物体(例えば医療装置)の実際の位置によく相関することを確実にする。推薦リフレッシュ速度は、追跡される物体が移動する速度に応じて、かつ追跡される物体が移動する環境に応じて変動する。本発明の例示的実施形態では、脳または消化管のようなより静的な身体部分における医療装置の追跡の場合、より低いリフレッシュ速度、例えば10回/秒が適しているかもしれない。心臓のような頻繁に動く身体部分における医療装置を追跡する場合の実施形態では、より高いリフレッシュ速度、例えば20回/秒が望ましいかもしれない。任意選択的に、選択された心周期位相から位置がプロットされるように、ECG出力のゲーティングを実現することができる。
【0010】
任意選択的に、電離放射線源の算出された位置のRMS誤差は10mm未満であり、任意選択的に5mm未満であり、任意選択的に2mm未満であり、任意選択的に1mm未満であり、任意選択的に0.5ないし0.8mmまたはそれ以下である。
【0011】
決定される位置の精度に影響を及ぼす変数として、DPM単位の線源の放射能、検出に使用される放射線センサの精度および/または応答時間、ならびに植え込まれた医療装置の速度が挙げられる。これらの変数の1つまたはそれ以上の改善は、1つまたはそれ以上の他の変数を補償することがある。任意選択的に、追跡される医療装置の速度の低下は、他の変数を補償するために使用することができる。任意選択的に、解剖学的撮像データを背景にして位置情報が表示される。任意選択的に、関連する解剖学的特徴をハイライトして、医療担当者による医療装置のナビゲーションを容易にする。任意選択的に、決定された位置は、別個に取得された画像を背景にして表示することができる。
【0012】
任意選択的に、2つまたはそれ以上の線源を同時に追跡することができる。任意選択的に、非対称医療装置の向きを決定するのに、多重線源追跡が使用される。任意選択的に、多重線源追跡は、2つまたはそれ以上の医療装置の放射能を医療処置のために調整するのに使用される。
【0013】
本発明の一部の実施形態の態様は、電離放射線源の方向を検出する角感度を持つセンサの使用に関係する。任意選択的に、方向の交点を算出することによって位置を決定することができるように、2つまたは3つの方向が同時にまたは逐次的に決定される。3つまたはそれ以上の方向を使用する場合、位置は3次元位置として表現することができる。任意選択的に、方向は、線源が存在する平面を決定するために使用される。
【0014】
任意選択的に、線源からの放射線を検出するためのセンサは、軸を中心とする回転角のセンサの少なくとも一部分の回転によって所望の角感度を達成する。例えば、検出器または放射線シールドを回転させることができる。代替的にまたは追加的に、センサは並進運動によって所望の角感度を達成することができる。
【0015】
本発明の一部の実施形態の態様は、検出器と線源との間の実効入射角に応答して少なくとも1つの放射線検出器からの出力信号の変化を引き起こす角感度を持つセンサに関する。出力信号の目標値は、線源の方向を示す角度で達成される。該方向は任意選択的に、線源が存在する面を決定するために使用される。
【0016】
任意選択的に、センサは、各々が別個の出力信号を有する放射線検出器を2つ以上含むことができる。任意選択的に、放射線検出器の少なくとも1つの少なくとも一部分を入射放射線から遮蔽または遮断するために、1つまたはそれ以上の放射線シールドを使用することができる。線源の方向を示す角度からの偏差が生じるにつれて、遮蔽度は変化し、出力信号は遮蔽度に応じて変化する。
【0017】
任意選択的に、コリメータを形成するように複数の放射線シールドが連携して使用される。放射線シールドは相互に平行であるか、または内向きに傾斜することができる。任意選択的に、平行であるか傾斜しているかにかかわらず、複数の放射線シールドを回転させることができる。
【0018】
任意選択的に、目標出力からの偏差は、線源の方向を示す角度からの角変位1ミリラジアン当たり出力範囲の1%である。任意選択的に、出力の偏差は偏差の方向のみならず偏差の大きさをも示す。本発明の様々な実施形態では、放射線検出器および/または放射線シールドは、角感度を与えるように変位させることができる。この変位は回転および/または並進とすることができる。
【0019】
本発明の一部の実施形態の態様は、センサモジュールの角感度を使用して方向を決定することによって、任意選択的に被験者の体内にある、医療装置を位置標定するためのコンピュータ化システムに関する。センサモジュールは、1つまたはそれ以上の放射線検出器に入射する放射線を測定する。入射放射線は出力信号を生成し、それはシステムによって方向情報に変換される。
【0020】
本発明の一部の実施形態の態様は、任意選択的に医療装置が医療処置中に被験者の身体の内部または付近をナビゲートされるときに、電離放射線源と医療装置とを関連付けて、装置の位置の決定を促進することに関する。任意選択的に、電離放射線源は0.01mCiから0.5mCiの範囲の放射能を有する。任意選択的に、電離放射線源は0.1mCi未満の放射能を有する。任意選択的に、電離放射線源は約0.05mCiの放射能を有する。関連付けは、線源および装置を単一のユニットとして一体的に形成することを含む。関連付けはまた、線源を装置に取り付けることを含む。任意選択的に、線源は10mm未満、任意選択的に5mm未満、任意選択的に2.5mm未満、任意選択的に1mm未満の最大寸法を有する領域に集中する。
【0021】
本発明の一部の実施形態の態様は、任意選択的に医療の文脈で、非撮像位置標定または追跡のための標的として、0.1mCi以下の放射能を持つ電離放射線源を使用することに関する。電離放射線源は、患者および/または医療担当者への生物学的影響を低減するように選択される。この選択は、放射線の強度、放射線の種類、および/または被曝時間の量(例えば処置を受ける患者の体内にある時間)についての考慮を含む。代替的にまたは追加的に、生体適合性材料から構成され、かつ/または生体適合性コーティングを被覆された放射線源を使用することができる。
【0022】
本発明の例示的実施形態では、電離放射線源を追跡および位置標定するためのコンピュータ化システムを提供する。該システムは、
(a)放射線源から電離放射線を受け取って出力信号を生成することのできる少なくとも1つの放射線検出器を備えた、少なくとも1つの非撮像センサモジュールと、
(b)出力信号を受け取って出力信号を方向情報に変換するように設計および構成されたCPUと、
を備える。
【0023】
任意選択的に、放射線源は医療装置と一体的に形成されるか、あるいは医療装置に取り付けられる。
【0024】
任意選択的に、少なくとも1つのセンサモジュールは少なくとも2つのセンサモジュールを含む。
【0025】
任意選択的に、少なくとも2つのセンサモジュールは少なくとも3つのセンサモジュールを含む。
【0026】
任意選択的に、少なくとも1つのセンサモジュールのうちの少なくとも1つは、センサモジュールを新しい位置に移動させるようにセンサモジュールに並進運動をもたらすことのできる推進装置をさらに備える。
【0027】
任意選択的に、推進装置はCPUからの並進運動信号によって動作可能である。
【0028】
任意選択的に、システムは追加的に、画像信号をCPUに提供することのできる撮像モジュールを備え、CPUは画像信号を被験者の身体の一部分の画像に変換することができる。
【0029】
任意選択的に、システムはさらに表示装置を備える。
【0030】
任意選択的に、表示装置は、被験者の身体の一部分の画像を、その上に医療装置の決定された位置を重ね合わせた状態で、表示することができる。
【0031】
任意選択的に、CPUは出力信号の少なくとも2つを受け取り、出力信号に基づいて放射線源の位置を算出する。
【0032】
任意選択的に、CPUは出力信号の少なくとも3つを受け取り、少なくとも3つの出力信号に基づいて放射線源の位置を算出する。
【0033】
任意選択的に、CPUは、放射線源位置が時間の関数としてプロットされるように、間隔をおいて位置を繰返し算出する。
【0034】
任意選択的に、放射線源は6ヶ月から18ヶ月の範囲の半減期を持つ同位元素を使用する。
【0035】
任意選択的に、システムは放射線を提供することのできる放射線源をさらに備える。
【0036】
任意選択的に、線源が0.01mCiから0.5mCiの範囲の放射能を有するときに、方向情報が生成される。
【0037】
本発明の例示的実施形態では、電離放射線源を方向的に位置標定するためのセンサを提供する。該センサは、
(a)少なくとも1つの機能構成部品と、
(b)少なくとも1つの機能構成部品を移動させることによって、センサに角感度を与える変位機構と、
を備える。
【0038】
任意選択的に、少なくとも1つの機能構成部品は、放射線源からの放射線を受け取りかつ出力信号を生成することのできる少なくとも1つの放射線検出器を備え、
変位機構は、出力信号が回転角により変化するように、少なくとも1つの放射線検出器を回転角だけ回転させることができる。
【0039】
任意選択的に、少なくとも1つの放射線検出器は少なくとも1つの第1放射線検出器および少なくとも1つの第2放射線検出器を備え、出力信号は、少なくとも1つの第1放射線検出器からの少なくとも1つの第1出力信号、および少なくとも1つの第2放射線検出器からの少なくとも1つの第2出力信号を含む。
【0040】
任意選択的に、センサは、少なくとも1つの第1放射線検出器からの第1出力信号の大きさおよび第2放射線検出器からの第2出力信号の大きさが回転角により変化するように、少なくとも1つの第1放射線検出器および少なくとも1つの第2放射線検出器に対して一定の角度に設置された少なくとも1つの放射線シールドを備える。
【0041】
任意選択的に、センサは、
(a)各々が放射線源から放射線を受け取り、少なくとも1つの第1放射線検出器から少なくとも1つの第1出力信号を生成し、かつ少なくとも1つの第2放射線検出器から少なくとも1つの第2出力信号を生成することのできる、少なくとも1つの第1放射線検出器および少なくとも1つの第2放射線検出器と、
(b)少なくとも1つの第1放射線検出器からの第1出力信号の大きさおよび第2放射線検出器からの第2出力信号の大きさが各々シールドの回転角により変化するように、シールドの回転軸を中心にシールド回転角だけ回転可能である少なくとも1つの放射線シールドと、
を備える。
【0042】
任意選択的に、少なくとも1つの放射線シールドは、
(i)少なくとも1つの第1放射線検出器と少なくとも1つの第2放射線検出器との間に配置された一次放射線シールドと、
(ii)少なくとも1つの第1放射線検出器の方向に向けられた入射放射線を妨げるように展開された少なくとも1つの第1の追加放射線シールドと、
(iii)少なくとも1つの第2放射線検出器の方向に向けられた入射放射線を妨げるように展開された少なくとも1つの第2の追加放射線シールドと、
を備える。
【0043】
任意選択的に、少なくとも1つの第1の追加放射線シールドおよび少なくとも1つの第2の追加放射線シールドは各々、一次放射線シールドの方向に傾斜する。
【0044】
任意選択的に、少なくとも1つの第1放射線検出器および少なくとも1つの第2放射線検出器は対として編成され、各対は第1部材および第2部材を有し、一次および追加放射線シールドの各放射線シールドは、出力信号が回転角により変化するように、対の1つの第1部材の1つと第2部材の1つとの間に配置される。
【0045】
任意選択的に、センサは追加的に、回転軸を中心に回転角だけ少なくとも1つの機能構成部品を回転させることができる。
【0046】
本発明の例示的実施形態では、装置の位置を決定する方法を提供する。該方法は、
(a)関連付けられた放射線源を有する装置を提供するステップと、
(b)放射線源に対する方向を決定するステップと、;
(c)放射線源に対する少なくとも第2方向をさらに決定するステップと、
(d)第1の方向と少なくとも第2の方向の交点を算出することによって装置を位置標定するステップと、
を含む。
【0047】
任意選択的に、放射線源に対する少なくとも第2方向をさらに決定するステップが、放射線源に対する第3方向を決定するステップを含み、かつさらに、
(e)第1方向、第2方向、および少なくとも第3方向の交点を算出するステップ、
を含む。
【0048】
本発明の例示的実施形態では、追跡可能な医療装置を製造する方法を提供する。該方法は、検出可能な量の放射性同位元素を医療装置に組み込むか、あるいは固定して取り付けるステップを含む。
【0049】
任意選択的に、検出可能な量は0.01mCiから0.5mCiの範囲内である。
【0050】
任意選択的に、検出可能な量は0.1mCi以下である。
【0051】
任意選択的に、検出可能な量は0.05mCi以下である。
【0052】
任意選択的に、同位元素はイリジウム192である。
【0053】
本発明の一部の実施形態の態様は、非撮像位置標定または追跡の標的として0.1mCi以下の放射能を持つ電離放射線源を使用することに関する。
【0054】
図面の簡単な説明
図では、2つ以上の図に現われる同一の構造、要素、または部品は一般的に、それらが現われる全ての図で、同じ符号で標識される。図に示す構成部品および特徴の寸法は、提示し易く、かつ分かり易いように選択され、必ずしも縮尺通りではない。図を以下に列挙する。
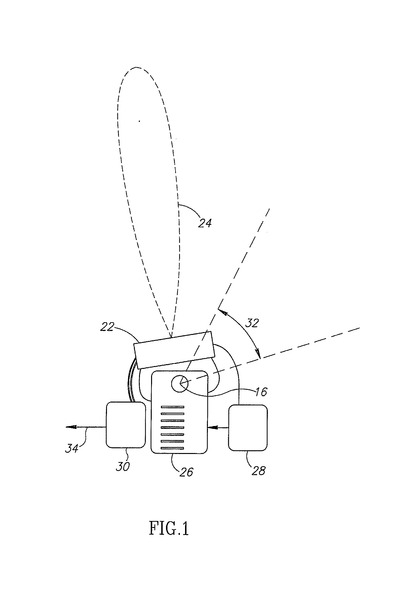
図1は、本発明の例示的実施形態に係るセンサモジュールの1つの実施形態の側面図である。
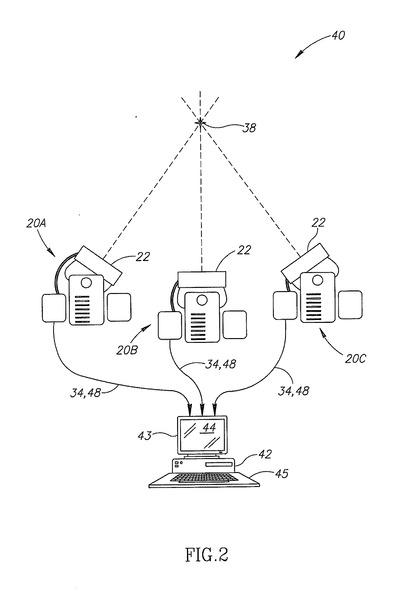
図2は、本発明の例示的実施形態に係るコンピュータ化追跡システムの略図である。
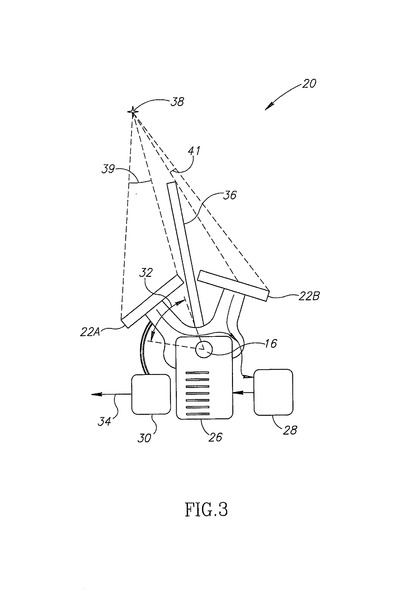
図3は、モジュールによる信号の受信を示す、本発明の例示的実施形態に係るセンサモジュールの追加の実施形態の側面図である。
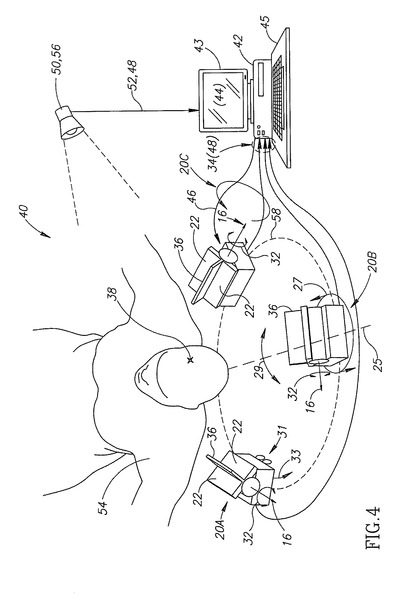
図4は、患者に対するセンサモジュールの1つの可能な配置を示す、本発明の例示的実施形態に係るコンピュータ化追跡システムの斜視図である。
図5は、本発明の例示的実施形態に係るセンサモジュールの追加の実施形態の側面図である。
図6Aおよび6Bは、本発明の例示的実施形態に係るセンサモジュールのさらなる追加の実施形態の側面図である。
図7Aおよび7Bは、本発明の例示的実施形態に係るシステムを使用して、光子の1回の衝突当たりのセンサの回転の関数としてそれぞれプロットされたシミュレーション応答時間およびシミュレーションrms位置のグラフである。
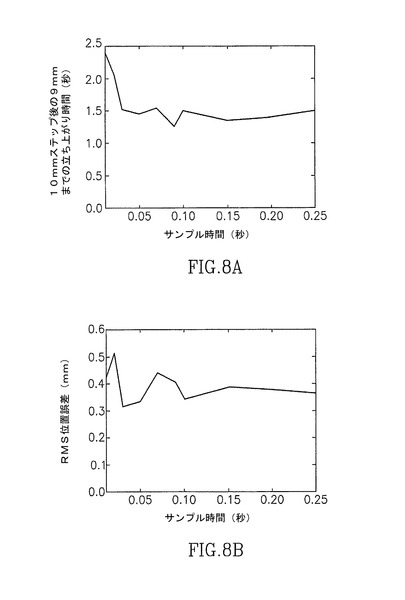
図8Aおよび8Bは、本発明の例示的実施形態に係るシステムを使用して、サンプリング時間の関数としてそれぞれプロットされたシミュレーション応答時間およびシミュレーションrms位置のグラフである。
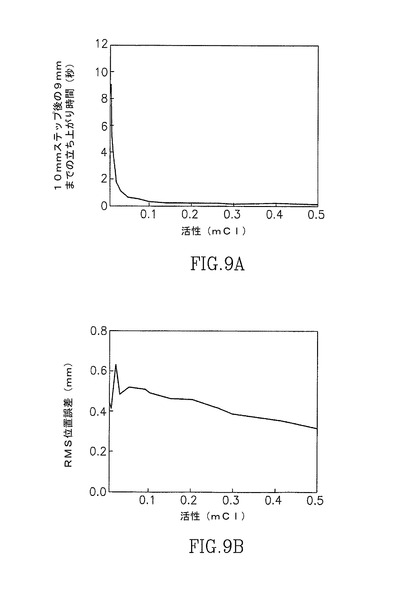
図9Aおよび9Bは、本発明の例示的実施形態に係るシステムを使用して、放射性信号源の比放射能の関数としてそれぞれプロットされたシミュレーション応答時間およびシミュレーションrms位置のグラフである。
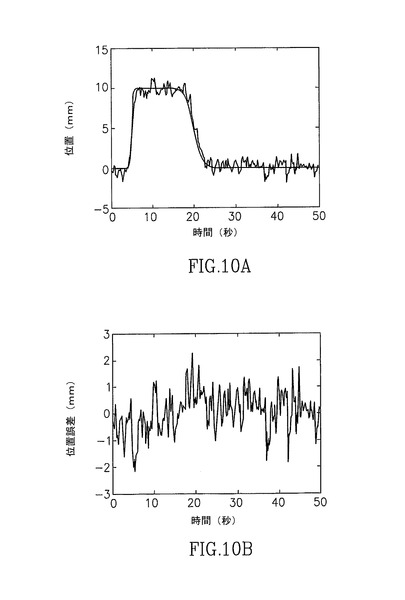
図10Aは、時間の関数としての位置のグラフである。本発明の例示的実施形態に係るシステムから出力されるシミュレーション位置が、シミュレーションの実際の入力位置の上に重ねられる。
図10Bは、図10Aの2つのプロットに基づいて時間の関数としてプロットされたrms位置誤差のグラフである。
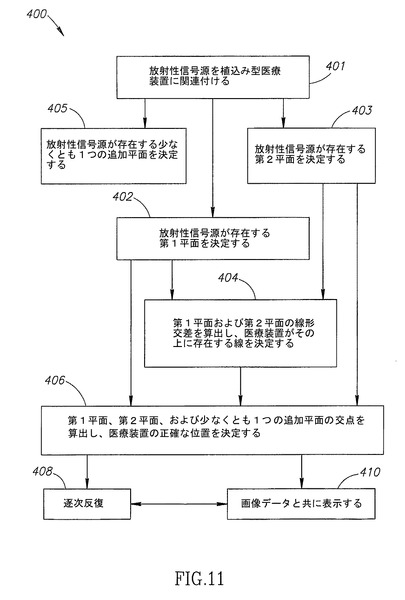
図11は、本発明の例示的実施形態に係る方法の簡易流れ図である。
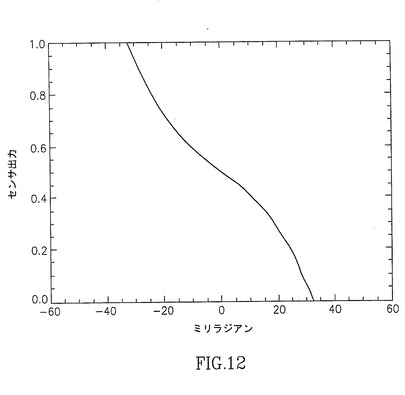
図12は、回転角の関数としてのセンサ出力のグラフである。
【発明を実施するための最良の形態】
【0055】
本発明の1つの実施形態では(図2および4)、コンピュータ化システム40は装置を位置標定および/または追跡する。図4に示す実施形態では、装置は医療装置である。該医療装置は、器具、インプラント、ナビゲーション装置、および導管を含むが、それらに限定されない。器具はカテーテル、カニューレ、トロカール、切断具、把持具、および位置決め具を含むがそれらに限定されない。インプラントは密封小線源シード、ステント、および徐放性薬物治療パケットを含むが、それらに限定されない。ナビゲーション装置はガイドワイヤを含むが、それに限定されない。導管はチューブ類(例えば食道管および気管チューブ)を含むが、それらに限定されない。本発明の例示的実施形態では、1つまたはそれ以上の移動する器具を追跡する。
【0056】
本発明の例示的実施形態では、線源の位置は、非撮像データ取得によって決定される。この明細書および付属の特許請求の範囲を目的として、語句「非撮像」とは、線源および解剖学的または他の非線源特徴を同一画像内に含む画像取得プロセスの一部として取得されないデータを指す。任意選択的に、撮像回路に適さず、それに接続されないセンサを使用する。撮像は、少なくとも1つの関心点を含む多数の点に関する情報に依存し、情報の画像解析により、関心点の特徴、例えば物体に関連する位置を決定する。本発明の例示的実施形態では、位置感知により線源のみに関する情報を提供する。これは検出能および/または精度を改善することができる。
【0057】
任意選択的に、医療装置は、その位置が決定される経路の少なくとも一部分にあるときに、少なくとも部分的に被験者54の体内にある。図4には、システム40が頭蓋内医療処置中に被験者54の頭内の装置を追跡するように構成された、例示的実施形態が示されている。この図面は純粋に例示であって、本発明の範囲の限定と解釈すべきではない。
【0058】
図2は、連携して作動する角度検出に依存して放射線源38の位置を決定する3つのセンサモジュール20を含む、システム40の実施形態を示す。図示した実施形態では、センサ20の各々は、線源38の方向を示す回転角32を決定する。この回転角32(図1)は、線源38が存在する平面であって放射線検出器22と交わる平面を画定する。回転角32は出力信号34として提供され、それはコンピュータ化処理装置(CPU)42に中継される。CPU42は、点で表わされる3つの方向(平面)の交差部を決定する。
【0059】
本発明の一部の実施形態では、センサモジュール20の放射線検出器22が一連の回転角32だけ回転するときに、センサ20の検出の境界24(図1)内に位置する線源38をシステム40によって正確に位置標定することができる。境界24の外に位置する線源38は正確に位置標定されない。この理由から、一部の実施形態では、線源38の予想経路が境界24内に位置するように、センサ20の各々を展開することが望ましい。本発明の一部の実施形態では、線源38を境界24内に維持するように、センサ20を動かすことができる。境界24のサイズおよび形状は、センサ20の構成によって変化する。
【0060】
目標回転角32の決定の精度は、システム40によって決定される線源38の位置標定の精度に貢献する。感度を回転角32の小さい差に高めることのできるセンサモジュール20の様々な変形を、図3、5、6A、および6Bに例示的実施形態として図示し、以下でさらに詳しく説明する。
【0061】
図4は、角度検出を使用し、円58の外周上に分散された3つのセンサモジュール20を含む、例示的システム40の斜視図を提示する。図示した実施形態では、モジュール20は放射線シールド36を特徴とする。図示した実施形態で、各モジュール20は円58に接する軸を中心に回転する。この回転により、以下でさらに詳述するように医療装置の追跡が可能になる。本発明の様々な実施形態では、所望の角度検出を促進するために、回転運動または並進運動を使用することができる。図4に示した実施形態では、センサモジュール20の平面と頭内の関心領域との間の垂直距離が円58の半径にほぼ等しくなるように、センサモジュール20は被験者54の頭の下に配置される。この配置は、線源38の予測経路が境界24内に位置するように、センサ20の各々が展開されることを確実にする。この配置は、円58の中心に高くなったヘッドレストを装備したボード上に設けられた3つのセンサ20を提供することによって、反復可能にかつ容易に達成することができる。これは任意選択的に、広範囲に及ぶ測定手順無しに、被験者54がセンサ20に対して正しく配置されるように、リクライニングチェアまたは調整可能な診察台を容易に配置することを可能にする。
【0062】
システム40の位置標定ボリュームは、線源38の位置を決定することのできる空間座標の組である。システム40の位置標定ボリュームは、センサ20の位置、それらの設計、および/またはそれらの性能特性に依存するサイズおよび/または形状を有する。任意選択的に、システム40の位置標定ボリュームは、センサ20の検出の境界24の交差として表わすことができる。任意選択的に、複数の組のセンサ20を使用することによって、2つまたはそれ以上の位置標定ボリュームを形成することができる。任意選択的に、これらの位置標定ボリュームを重ね合わせることができる。
【0063】
放射線源38の質量の中心の3次元位置は、各々のモジュール20の既知の位置および回転角を前提として、各々のセンサモジュール20によって測定された角度32から、CPU42によって算出される。本発明の一部の実施形態では、線源38は1ないし10mmの長さの1本のワイヤである。この長さ範囲は、有用な直径を持つワイヤとして供給され、システム40の効率的な動作を可能にする充分なDPM数を提供することのできる、現在利用可能な固体同位元素源38を反映している。システム40は、このワイヤ片38の真ん中の位置を決定し、決定された位置を任意選択的に誤差限界を示す単一点まで分解する。
【0064】
センサモジュール20は少なくとも1つの放射線検出器22を含む。放射線検出器22は、医療装置に取り付けられた放射線源38から放射線を受け取り、出力信号34を生成することができる。放射線検出器22は、入射放射線をCPU42に中継することのできる信号に変換する任意の技術を使用することができる。線源38がガンマ放射線源である場合、放射線検出器22は例えば、電離箱、ガイガー・ミューラー計数管、シンチレーション検出器、半導体ダイオード検出器、比例計数管、またはマイクロチャネルプレートに基づく検出器とすることができる。様々な種類の放射線検出器22が、例えばEVproducts(米国ペンシルベニア州サクソンバーグ)、浜松ホトニクス(日本国静岡県浜松市)、Constellation Technology(米国フロリダ州ラーゴ)、Soltec Corporation(米国カリフォルニア州サンフェルナンド)、Thermo Electron Corporation(米国マサチューセッツ州ウォルサム)、Bruker‐biosciences(米国マサチューセッツ州ビルリカ)、Saint Gobain crystals(米国オハイオ州ニューベリ)、およびSilicon Sensor GMBH(ドイツ国)から市販されている。適切な市販の放射線検出器22を、センサ20の一部としてシステム40の文脈に組み込むことができる。少数のDPMを生成する線源38および優れた感度(つまりCPMとDPMとの間の高い比率)をもたらすS型の検出器22に依存する本発明の実施形態は、センサモジュール20の性能を改善する。センサ20と線源38との間の距離が増大すると、この考慮事項はいっそう意味を持つようになる。より高いDPM出力を持つ線源38に依存する本発明の実施形態は、あまり高感度でない放射線検出器22の使用を可能にする。
【0065】
様々な種類のセンサモジュール20について以下でさらに詳細に記述する。
【0066】
システム40は、医療装置によって実行される処置に悪影響を及ぼさない率で位置標定および/または追跡を行うために、充分な量の放射線を提供することのできる放射線源38をさらに含む。ほとんどの医療処置で、毎秒10回の位置標定は、システム40のオペレータが医療装置を所望の位置まで快適にナビゲートすることを可能にするのに充分である。以下でさらに詳述するコンピュータによるシミュレーションからの結果に基づいて、体内で線源38による数時間の処置を受ける患者に有意のリスクをもたらさないように、これらの基準を満たす放射線の量を充分に低くすることができる。代替的にまたは追加的に、該量は、システム40のオペレータが下述するように長時間の放射線曝露から有意のリスクに曝されないように、充分に低くすることができる。
【0067】
例えば、イリジウム192を使用して放射線源38の放射能を0.01mCiから0.5mCiに増大した場合、精度は2倍に改善されるだけである(図9B)。しかし、0.1mCi未満の放射能レベルは、応答時間に悪影響を及ぼす(図9A)。0.1mCiより大きい放射能は、応答時間を有意に改善しない。0.05mCiの放射能は、以下でさらに詳述するようにレイテンシと精度との間の受け入れられるトレードオフを提供し、性能と放射線量との間の優れた妥協をもたらす。
【0068】
0.05mCiの線源38は、発生する放射線量がグローブ無しに安全に取り扱うことができるほど低い状態で、システム40が適切な速度および精度を達成することを可能にする。0.05mCiの線源38からの患者の放射線被曝は、米国における平均吸収背景放射より8倍高いだけである。従前より利用可能な代替物と比較する目的で、0.05mCiの線源38は、患者に0.0022mSv/時の実効線量当量(EDE)を被曝させる。典型的な蛍光X線透視法誘導処置は1回の処置当たり1〜35mSVのEDEを有し、典型的な核医学処置は5mSvのEDEを有する。したがって、本発明の一部の実施形態は、患者の放射線被曝を著しく低減するために使用することができる。
【0069】
医療担当者は任意選択的にさらにいっそう低い放射線を被曝し、被爆レベルは介在距離の2乗に比例して低下する。例えば、0.05mCiの線源38から1メートルの位置で、1日6時間、週5日、年52週、処置を実行する医師は、0.22mSvの年間総EDEを蓄積する。これは、被曝監視が一般的に実行される放射線被曝レベルの約5%である。この被曝レベルは1.4e−4mSv/時に対応し、それは蛍光X線透視術による一般的線量に関連する1〜12mSv/時より数桁低い。
【0070】
イリジウム192は、医療用途における使用がすでに容認されており、かつ一般的に被験者の体内に導入しても安全であるとみなされているため、実施例として使用した。しかし、この同位元素は適切な線源38の単なる例証としての実施例であって、システム40の制限と解釈すべきではない。システム40の文脈で使用するための同位元素を選択する場合、放射能(DPM)、放射線の種類、および/または半減期を考慮することができる。放射能については上述した。加えて、例えば20〜50cmの関連距離で適正な効率で壊変事象を検出できることが一般的に望ましい。長い半減期は、在庫管理を容易にし、かつ無駄を減らすことによって長期的な総コストを低減するため、好ましいかもしれない。しかし、短い半減期は放射性物質に対する懸念を軽減することができ、かつ/またはより小さい線源を使用することを可能にする。
【0071】
本発明の一部の実施形態では、線源38は陽電子放出源である。これらの実施形態では、センサ20は、陽電子/電子衝突の結果放出される光子がやって来る方向を決定する。陽電子が電子と出会う前に線源38から移動する距離は一般的に非常に小さいため、この相違は任意選択的に、決定される位置の精度になんら有意の影響を及ぼさない。線源38に陽電子を使用すると、検出に利用可能な全電離放射線放出を効果的に増幅することができる。任意選択的に、多重検出器を使用すると、陽電子対消滅事象の検出が可能になる。他の線源の種類の例として、ガンマ線源、アルファ線源、電子線源、および中性子線源が挙げられる。
【0072】
同位元素に関係なく、線源38は、追跡される医療装置(例えばガイドワイヤまたはカテーテル)内に組み込むことができる。組込みは例えばガイドワイヤ先端付近、および/またはカテーテル内またはインプラント内の異なる位置に行うことができる。電離放射線源は、ガイドワイヤの一部分、または医療装置の一部分と一体的に形成するか、あるいはそれに取り付けることができる。取付けは、例えば装置の専用受容器内に線源を接着、溶接、または挿着することによって達成することができる。取付けはまた、医療装置に貼付される粘着タグ(例えばクラックアンドピールステッカ(crack and peel sticker))、塗布可能な塗料または接着剤のような線源を供給することによっても達成することができる。任意選択的に、電離放射線源は固体として、例えば放射性同位元素を含む1本のワイヤとして供給される。所望の同位元素を含有する短いワイヤは、ガイドワイヤまたは医療装置に固着することができる。この結果、医療装置および放射線源が共局在する。固着は例えば、ガイドワイヤの製造中に、固体線源のガイドワイヤとの同時押出しによって達成することができる。代替的にまたは追加的に、電離放射線源は、医療装置および/またはガイドワイヤに塗布することのできる放射性塗料として供給することができる。電離放射線源がガイドワイヤまたは医療装置に供給または固着される厳密な形態に関係なく、医療処置の最後に体内から取り出された後に、被験者の体内に有意の放射性残渣が残ってはならない。
【0073】
分かり易くするために、線源38は単一の品目として図示されているが、2つまたはそれ以上の線源38をシステム40によって同時に追跡することができる。システム40は、離散位置または経路、放射線の周波数、放射線のエネルギ、または放射線の種類を含め、それらに限らず、多種多様の手段によって複数の線源38を識別することができる。本発明の一部の実施形態では、2つまたはそれ以上の分解可能な線源38を使用して、追跡される品目に関する方位情報がもたらされる。換言すると、これらの実施形態は、座標X、Y、およびZによって画定される3次元位置だけでなく、画定された位置における追跡対象物体の方位に関する情報をも決定することができる。この特徴は、非対称な器具を使用する場合の医療文脈に関連する。
【0074】
システム40は、1つまたはそれ以上のセンサモジュール20とコンピュータ処理装置(CPU)42との間でデータ信号を伝達することのできる通信チャネル48を含むことができる。通信チャネルは有線または無線またはそれらの組合せとすることができる。有線通信チャネルは直接ケーブル接続、公衆交換電話網(PSTN)を介する電話接続、光ファイバ接続、および外部に明白なワイヤを持たない統合物理ユニットとしてのシステム40の構造を含むが、それらに限定されない。無線通信チャネルは赤外線伝送、高周波伝送、セルラ電話伝送、および衛星媒介通信を含むが、それらに限定されない。信号伝送が所望のリフレッシュ速度を達成可能である限り、通信チャネル48の厳密な性質はシステム40の動作の中心ではない。通信チャネル48は任意選択的に、システム40を遠隔医療の文脈で動作させることを可能にする。代替的にまたは追加的に、通信チャネル48は、医療担当者の放射線被曝を所望の程度まで低減する手段として、線源38と医療担当者との間の距離を増大させるのに役立つかもしれない。
【0075】
CPU42は、通信チャネル48を介して出力信号34を受け取り、かつ出力信号34を放射線源38に関する方向情報に変換するように設計および構成される。この方向情報は、例えば放射線源38が存在する平面として表わすことができる。出力信号34は少なくとも回転角32を含む。任意選択的に、出力信号34は、線源38からの信号の受取りを示す成分を示す信号強度を含むことができる。線源38からの信号の受取りは、2進信号(はい/いいえ)または信号の大きさ(例えば毎分カウント数)のいずれかとして示すことができる。本発明の様々な実施形態では、出力信号34はデジタルまたはアナログのいずれかとすることができる。アナログ信号からデジタル信号への変換は、センサモジュール20またはCPU42のいずれかによって実行することができる。場合によっては、単一の平面内における放射線源38の位置標定で充分である。しかし、本発明の多くの実施形態では、CPU42が出力信号34の2つを受け取り、交差を算出することが望ましい。出力信号34が平面として表現される場合、これは2つの平面の線形交差44を生成する。これは、線形交差44上の放射線源38を位置標定する。任意選択的に、この計算の結果44は、さらに詳しく上述するように、表示装置43に表示される。本発明の追加の実施形態では、CPU42は出力信号34の少なくとも3つを受け取り、それらの交差を算出する。出力信号34が平面として表わされ、センサ20が円58の外周上に配置される場合、これは少なくとも3つの平面の交点44を生成し、それらによって算出された交点44に放射線源38が位置標定される。
【0076】
システム40は医療処置中に医療機器を追跡するために最も頻繁に使用されるため、CPU42はしばしば、放射線源38の位置を時間の関数としてプロットすることができるように、交点を所定の間隔で繰返し算出するために使用される(図10A参照)。各プロット位置およびプロット全体の精度は、線源38の放射能、センサ20の応答時間の精度、および植え込まれる医療装置が被験者54の体内を移動する速度によって影響されることがある。医療処置は一般的に速度より精度を重視するため、システム40のオペレータは、処置に使用される医療装置の移動の速度を低減することによって、線源38の不足、またはセンサ20の精度もしくは応答時間を補うことができる。図10Bは、±2mmの範囲の追跡精度でシミュレートしたシステム40の出力を示す。CPU42はまた任意選択的に通信チャネル48を使用して、後で詳述するように様々な信号をセンサモジュール20に送信することもできる。代替的にまたは追加的に、CPU42は任意選択的に通信チャネル48を使用して、医療装置に様々な信号を送信することもできる。本発明の様々な実施形態では、システム40は、血管形成術(例えばバルーン血管形成術)、展開処置(例えばステント配置または密封小線源治療用の放射性シードの植込み)、生検処置、切除処置、および焼灼処置をはじめとする処置の文脈で使用することができるが、それらに限定されない。
【0077】
CPU42は単一の物理的ユニットとして図示されているが、本発明の一部の実施形態では、実際には多数の物理的に離散したCPUを使用することができる。例えばCPU42に属するとみなされる一部の機能または機能の一部分は、センサモジュール20に設置されたプロセッサによって実行することができる。この明細書および付属の特許請求の範囲を目的として、本書で記述するように線源38を位置標定するように連携して働く複数のプロセッサは、まとめてCPU42とみなされる。
【0078】
本発明の一部の実施形態では、システム40は、3つまたはそれ以上の出力信号34を同時に受け取って信号源38を示す3つまたはそれ以上の方向を算出するために、3つまたはそれ以上のセンサモジュール20を同時に使用する。方向が平面として表わされる場合、3つまたはそれ以上の平面は単一の点で交差する。しかし、システム40は、2つまたは1つのセンサモジュール20を使用して線源38を単一点に位置標定する代替実施形態を含む。これは、後述するように幾つかの異なる方法で達成することができる。
【0079】
システム40の一部の実施形態では、センサモジュール20の少なくとも1つが一連の位置を通過するように少なくとも1つの放射線検出器22を回転させることができる。検出器22における線源38からの放射線の受取りが回転角32により変化するように、各位置は回転角32によって画定される。この回転は多種多様な方法で達成することができる。例えば回転機構26は、受け取る放射線の量を変数とする規則に従って、放射線検出器22からのフィードバックによって動作することができる。代替的に、回転機構26は、受け取る放射線の量および/または時間を変数として含む規則に従って、CPU42からの信号によって動作することができる。代替的に、回転機構26は、特定の回転角32で放射線がどれだけ放射線検出器22に衝突するかに関係なく、固定したスケジュールに従って放射線検出器22を回転させることができる。回転機構26は、回転角32を達成するために多種多様な異なる機構を使用することができる。これらの機構は機械的機構、油圧機構、電気的機構、電子的機構、および圧電機構を含むが、それらに限定されない。任意選択的に、独立角度測定要素30を使用して、実際の回転角32をより正確に確認することができる。角度測定要素30は図1、2、および3に物理的に離散した部品として図示されるが、システム40の性能に有意の影響を及ぼすことなく、回転機構26に物理的に一体化することもできる。厳密な動作の詳細に関係なく、目的は、センサモジュール20が線源38の方向を直接指し示す回転角を検出することである。この角度を目標回転角32と呼ぶ。
【0080】
システム40の一部の実施形態では、放射線検出器22(図3、5、6A、および6B)は、少なくとも1つの第1放射線検出器22Aおよび少なくとも1つの第2放射線検出器22Bを含む。システム40のこれらの実施形態は、各回転角32に対する放射線検出器22Aおよび22Bからの出力信号34の比較に依存する。既知の関係を持つ放射線検出器22Aおよび22Bから出力信号34を生成する目標回転角32は、放射線検出器22Aおよび22Bが両方とも同じ程度に線源38を向くことを示す。放射線検出器22Aおよび22Bが同一受領領域を持つ場合、既知の関係は同等である。この目標回転角32を使用して、線源38が存在する平面を決定する。
【0081】
放射線検出器22Aおよび22Bからの出力信号34間の小さい差にシステム40の感度を高めるために、放射線検出器22Aおよび22Bに対して一定角度に1つまたはそれ以上の放射線シールド36を導入することが可能である。放射線シールド36は、第1放射線検出器22Aからの出力信号34の成分の大きさおよび第2放射線検出器22Bからの出力信号34の成分の大きさを各々、回転角32により変化させる(図3参照)。放射線シールド36は、入射角39および41の間の関係に応じて、放射線検出器22Aまたは22Bのいずれかを差別的に遮蔽する。ある回転角32では、放射線検出器22Aおよび22Bのどちらも放射線シールド36によって遮蔽されない。この回転角32を使用して、線源38が存在する平面を決定する。この構成は、シャドー効果のため、この目標回転角32からの小さい変分が放射線検出器22Aおよび22Bからの出力信号34に比較的大きい差を生じることを確実にする。したがって、センサモジュール20における放射線シールド36の使用は、システム40の感度を増大させる。この増大した感度は、検出可能な放射線計数が低くても、センサモジュール20が効果的に機能することを可能にする。
【0082】
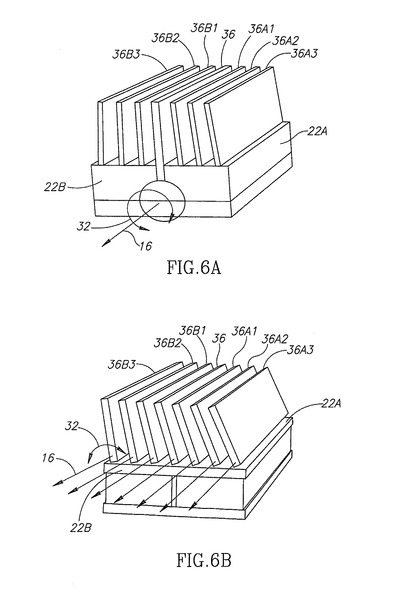
図6Aは、放射線シールドが第1放射線検出器22Aおよび第2放射線検出器22Bの間に配置された一次放射線シールド36を含む、センサモジュール20の追加の実施形態を示す。この図の実施形態はまた、第1放射線検出器22Aを一連の第1放射線検出器に分割して第1放射線検出器22Aの方向に向けられた入射放射線を妨げる、一連の第1の追加放射線シールド(36A1、36A2、および36A3)をも含む。図示された実施形態はまた、第2放射線検出器22Bを一連の第2放射線検出器に分割して第2放射線検出器22Bの方向に向けられた入射放射線を妨げる、一連の第2の追加放射線シールド(36B1、36B2、および36B3)をも含む。この構成は、目標回転角32からのずっと小さい変分でも、追加放射線シールド(図示した実施形態では36A1、36A2、36A3、36B1、36B2、および36B3)の個数に比例してシャドー効果を高めることによって、放射線検出器22Aおよび22Bからの出力信号34の比較的大きい差を生じることを確実にすることができる。したがって、センサモジュール20における追加放射線シールド(例えば36A1、36A2、36A3、36B1、36B2、および36B3)の使用は、システム40の感度の追加的増大を達成するのに役立つことができる。任意選択的に、二次放射線シールド(図示した実施形態では36A1、36A2、36A3、36B1、36B2、および36B3)は一次放射線シールド36の方向に傾斜する。二次放射線シールド36A1、36A2、36A、36B1、36B2、および36B3の一次シールド36の方向への角度は、焦点を改善するため、かつ/または撮像ボリュームを画定するために、例えばモータを用いて変化させることができる。
【0083】
同様の効果は、放射線検出器22Aおよび22Bを一定角度に保持し、放射線シールド36(図6B)を角変位にさらすことによって達成することができる。したがって、システム40はまた、放射線検出器22が少なくとも1つの第1放射線検出器22Aおよび少なくとも1つの第2放射線検出器22Bを含み、かつ検出器22Aおよび22Bからの出力信号34の離散成分の大きさが各々シールド回転角32の関数として変化するように、少なくとも1つの放射線シールド36がシールド回転軸を中心にシールド回転角32だけ回転可能な状態で、出力信号34が検出器22Aおよび22Bからの離散成分を含む、実施形態をも含む。
【0084】
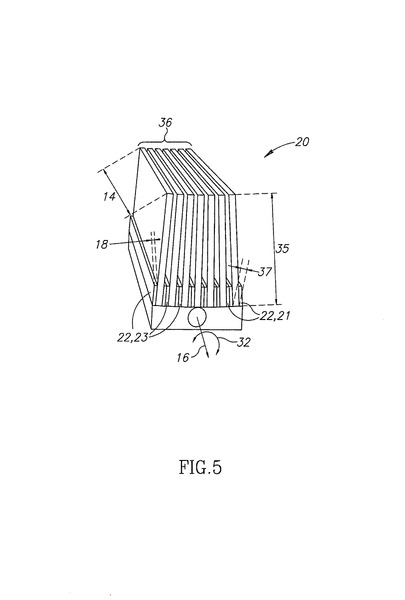
今、図5を参照すると、システム40のセンサモジュール20の代替的実施形態は、放射線検出器22が複数の放射線検出器22、および複数の放射線検出器22の間に分散された複数の突出放射線シールド36を含むように構成されている。これらの実施形態では、複数の放射線検出器22は対として編成され、各対は第1部材21および第2部材23を有し、複数の突出放射線シールドの各突出放射線シールド36は、対の放射線検出器22の第1部材21と第2部材23との間に配置される。この実施形態では、センサモジュール20は、放射線検出器22における放射線源38からの放射線の受取りが回転角32により変化するように、一連の回転角32だけ放射線検出器22を回転させることができる。各放射線検出器は出力信号34を生成する。CPU42は全ての第1部材21からの出力信号34を合計して第1和を生成し、かつ全ての第2部材23からの出力信号34を合計して第2和を生成する。全ての放射線検出器22が同一であることを前提として、センサが線源38の質量の中心に直接向けられたときに(目標回転角32)、第1和および第2和は等しい。この実施形態は、回転角32がいずれかの方向に非常にわずかに変化するだけでも、モジュール20全体の総出力が急激に増加することを確実にする。代替的にまたは追加的に、モジュール20全体の総出力の符号は、モジュール20全体のその総出力で所望の回転角32に達するために必要な回転の方向を示す。したがって、この構成は、システム40の動作速度および全体的精度の両方を高めるように働く。この型のセンサモジュール20は、(例えば)ある期間の線源38からのガンマ線の衝撃を合計する第1アルゴリズムを実現し、かつモジュール20全体の総出力の符号に基づいて、所望の回転角32を達成するためにどの方向にどの程度放射線検出器22を回転させるかをCPU42に決定させることによって、動作することができる。代替的に、CPU42は(例えば)第2アルゴリズムを実装し、各検出計数に応答して非常に少量だけ放射線検出器22を回転させる。本書に提示する性能データは第2アルゴリズムのシミュレーションに基づいているが、第1アルゴリズムも同様に有用であると信じられる。
【0085】
システム40の追加の実施形態では、単一センサモジュール20を使用して、線源38が存在する2つの交差する平面を決定することができる。これは、例えばセンサモジュール20の回転によって、またはセンサモジュール20を新しい位置に移動させることによって達成することができる。
【0086】
本発明の一部の実施形態では、センサモジュール20は追加的に、回転軸25を中心に回転角29だけ放射線検出器22を回転させることができる。回転は、回転機構26について上述したように多種多様な方法で機能することのできる、回転機構27によって生成される。本発明のこれらの実施形態では、回転角29はセンサモジュール20の方位の成分として含まれ、出力信号34に含まれる。回転は、上述しかつ下述するセンサモジュール20の構成のいずれかまたは全ての文脈で使用することができる。回転は、例えばCPU42から通信チャネル48を介してセンサモジュール20に伝送される回転信号46に応答して発生することができる。
【0087】
本発明の追加の実施形態では、センサモジュール20は、モジュール20の位置が変更されるように、モジュール20に並進運動33をもたらすことのできる推進装置31を含む。推進は、CPU42から通信チャネル48を介してセンサモジュール20に伝送される、例えば並進運動信号46に応答して開始することができる。本発明の様々な実施形態では、推進は、単一のセンサモジュール20が複数の位置から動作することを可能にするか、あるいはセンサモジュール20に角感度を提供するために使用することができる。換言すると、並進運動は、特に少なくとも1つの放射線シールド36を使用する実施形態で、角変位の代替物として使用することができる。並進運動を使用する実施形態では、第1次元における単一センサ20の並進は、第1組の方向情報の取得を可能にする。例えば図4に示すシステム40の実施形態では、センサ20Aの逐次垂直変位を使用して、線源38が存在する第1平面を決定することができる。センサ20Bの逐次水平変位は、線源38が存在する第2平面を決定するために使用することができる。代替的にまたは追加的に、単一センサ20は垂直および水平変位の両方を受ける。逐次垂直および水平変位は、単一センサ20が線源38の存在する2つの非平行平面を決定することを可能にする。単一の線に沿った同時垂直および水平変位は、センサ20が線源38の存在する単一の平面を決定することを可能にする。2つまたは3つまたはそれ以上の平面の交差の決定は、上述の通りである。任意選択的に、本発明の同一実施形態に推進および回転を使用することができる。
【0088】
任意選択的に、システム40は、画像信号52をCPU42に提供することのできる画像取得装置56を含む、撮像モジュール50をさらに含む。撮像モジュール50は任意選択的に、CPU42との通信を促進するためにインターフェースを含む。CPU42は、画像信号52を被験者54の身体の一部分の画像に変換することができる。本発明の様々な実施形態では、撮像モジュール50は蛍光X線透視法、MRI、CT、または2Dもしくは多平面もしくは3D血管造影法に依存することができる。頭蓋内処置の場合、撮像は一般的に処置と同時に実行する必要はない。これは、脳が頭蓋内であまり移動しないからである。処置の1日またはそれ以上前、または処置の数時間前、または処置の直前に取得された画像を使用することができる。本発明の代替的実施形態では、画像データは別個に(つまりシステム40の外部で)取得して、アラインメントのためにCPU42に提供される。
【0089】
解剖学的画像表示および追跡情報のオーバレイのためのアラインメント方法およびアルゴリズムは、Jolesz(1997)Radiology 204(3):601‐12に考察されている。Joleszの論文は、そこに引用されている参考文献と共に、当業熟練者が画像データおよび追跡データの同時表示およびアラインメントを達成する実施可能性を提示している。Jolesz文献はそこに引用された参考文献と共に、個々の各参考文献が個々に引用されかつ参照によって援用されているかのように、参照によって完全に本書に援用する。
【0090】
本発明の例示的実施形態では、システム40によって決定された位置は、画像に対して登録される。これは、例えばシステム40および/またはセンサ20を画像取得装置56に登録することによって達成することができる。
【0091】
どの種類のセンサモジュール20を使用するかに関係なく、システム40は、CPU42と通信する表示装置43を含むことができる。表示装置43は被験者の身体の部分の画像を表示し、医療装置の決定位置(線源38の位置に対応する)を被験者の身体の部分の画像に重ね合わせることができる。重ね合わされた決定位置は任意選択的に、表示画面43上に点として表現される。任意選択的に、点は、CPU42によって決定された所望の信頼区間の標識によって取り囲まれる。信頼区間は、例えば円として、2つまたはそれ以上の交線として、あるいは1つまたはそれ以上の角括弧の対として表示することができる。代替的にまたは追加的に、表示装置43は、医療装置の決定位置(例えばガイドワイヤの先端における線源38の位置に対応する)の位置座標を表示することができる。
【0092】
表示装置43に、処置中または処置前のいずれかに撮像されたCT、MRI、または3D血管造影からの3次元血管造影データセットを提供することができる。適切なソフトウェアを使用して、血管造影データセットから脈管構造の3Dモデルを抽出し、3Dモデル視覚化の標準モードを使用してこのモデルを表示することができる。ガイドワイヤまたはカテーテルの3次元グラフ表現を脈管構造の3Dモデルに組み込み、システム40によって提供される位置情報に基づいて最小限の時間遅延で更新して、脈管構造内のガイドワイヤまたはカテーテルの位置を示すことができる。脈管構造およびカテーテルを含む3Dモデル全体を、最良可能な視覚化を達成するために処置の実行中に、ユーザがズームさせ、回転させ、かつその他対話により操作することができる。
【0093】
任意選択的に、システム40はさらに、1つまたはそれ以上のユーザ入力装置45(例えばキーボード、マウス、タッチスクリーン、トラックパッド、トラックボール、マイクロフォン、ジョイスティック、またはスタイラス)を含むことができる。入力装置45は、表示装置43上の画像を上述したように調整し、かつ/または回転機構26、回転機構27、推進装置31、または画像取得装置56のようなシステム40の様々な構成部品にコマンド信号を発行するために使用することができる。
【0094】
本発明は任意選択的に、図3に示しかつ上述したように、放射線源が存在する平面を決定するためのセンサ20を含む。簡単に言うと、センサ20は少なくとも1つの放射線検出器22を含み、少なくとも1つの放射線検出器は放射線源38からの放射線を受け取り、出力信号34を生成することができる。放射線検出器22における放射線源38からの放射線の受取りが回転角32により変化するように、センサ20は、各位置が回転角32によって画定される一連の位置を通過するように放射線検出器22を回転させることができる。回転は任意選択的に上述したように達成される。最大出力信号を生成する回転角32は、放射線源38が存在する平面を示す。
【0095】
センサ20の一部の実施形態では、放射線検出器22は少なくとも1つの第1放射線検出器22Aおよび少なくとも1つの第2放射線検出器22Bを含み、出力信号34は、第1放射線検出器22Aからの第1出力信号および放射線検出器22Bからの第2出力信号を含む。
【0096】
センサ20の一部の実施形態では、少なくとも1つの放射線シールド36はさらに、検出器22Aおよび22Bに対して一定の角度に設置される。その結果、少なくとも1つの第1放射線検出器からの第1出力信号34の大きさおよび放射線検出器22Bからの第2出力信号34の大きさは各々、上述したように回転角32により変化する。
【0097】
上に詳述したようにシールド回転軸を中心にシールド回転角32だけ回転可能な少なくとも1つの放射線シールド36を特徴とする、放射線源が存在する平面を決定するためのセンサ20(図6B)は、本発明の追加の実施形態である。
【0098】
図5に示し且つ上述したように、放射線源が存在する平面を決定するためのセンサ20は、本発明の追加の実施形態である。
【0099】
本発明の代替的実施形態では、被験者の体内の医療装置の位置を決定する方法400(図11)を提供する。方法400は、放射性信号源38と医療装置を共局在化させるステップ401を含む。共局在化は、例えば装置に関連付けられる放射線源を有する装置を提供することにより、または放射線源を装置と関連付けることにより達成することができる。
【0100】
方法400はさらに、全方向信号発生器が存在する第1平面を決定するステップ402と、全方向信号発生器が存在する第2平面をさらに決定するステップ403と、医療装置がその上に存在する線を決定する手段として、第1平面および第2平面の線形交差を算出するステップ404とを含む。
【0101】
方法400は任意選択的に、線源38が存在する少なくとも1つの追加平面をさらに決定するステップ405を含む。
【0102】
方法400は任意選択的に、医療装置の位置を決定する手段として、第1平面、第2平面、および少なくとも1つの追加の平面の交点を算出するステップ406を含む。
【0103】
任意選択的に、方法400は、移動する植込み医療装置を追跡するために一連の位置が生成されるように、逐次反復される408。算出された位置は、希望するならば解剖学的撮像データと共に表示することができる410。
【0104】
上に詳述したシステム40および/またはセンサ20の様々な態様および特徴は、方法400の実行を可能にするため、または改善するために使用することができる。
【0105】
システム40および方法400は様々な数学的アルゴリズムを使用して、線源38の位置を算出することができる。本発明の一部の実施形態の文脈で使用するのに適したアルゴリズムの1例は、次のように3つのセンサのセンサ出力信号34、センサ位置、およびセンサ方位(つまり回転角32)から線源38の位置を算出する。
1)各センサモジュール20によって画定される平面は、次の形の方程式を使用して算出される。

2)係数A、B、C、およびDは次の通り計算される。
a.3つの非共線点がセンサ20の内部基準フレーム内に画定される。
b.これらの3つの点は次いでセンサ20の位置によって変移され、センサの方位によって回転される。これにより、出力信号34が零であった場合、線源38が存在する平面が画定される。
c.これらの3つの点は次いで、センサ20の回転角32の軸を中心に、出力信号34によって示される回転角32だけ回転される。これにより、特定のセンサ20によって測定される通り線源38が存在する平面が画定される。
d.次の方程式で3つの点のx,y,z座標x1,y1,z1,x2,y2,z2,x3,y3,z3を使用して、A、B、C、およびDは次のように計算される。
3)3つのセンサ20の各々についてA、B、C、およびDを計算することにより、3つの3元方程式系が生成される。
この方程式系を解いて、(x,y,z)(またはベクトルの部分)、線源38の位置である3つの平面の交点の正確な解を得ることができる。
【0106】
追加センサ20の使用により、個々のセンサの誤差を平均することによって精度が改善され、また、センサが相互に合致する程度を示すことによって位置測定の精度を推定する手段ももたらされる。
【0107】
4個以上のセンサを使用する場合、アルゴリズムは次の通りである。
上記ステップ1および2は変わらない。各センサによって示される平面の方程式が計算される。ステップ3は次のように変更される。
3)各々のセンサに対してA、B、C、およびDが計算されると、次のような4つ以上の3元方程式の優決定系が得られる。
この優決定系は、追跡される要素の最尤位置である(x,y,z)の最適解を得るために当業者が精通している方法を用いて、最小2乗の意味で解くことができる。センサ出力の誤差のため、一般的に正確な解は無く、全ての平面が通過する単一の点は無いかもしれない。
最小2乗解が、各平面と(x,y,z)の解との間のユークリッド距離によって画定される誤差に基づくために、各平面を画定する全ての係数をそれらのそれぞれの法線ベクトル(法線ベクトルは(A,B,C)によって定義される)の長さによってスケーリングする必要がある。これは、少なくとも最小2乗解を計算する前に、A、B、C、およびDを平方根(A^2+B^2+C^2)で除算することによって行われる。
4)各々の平面と算出された位置との間のユークリッド距離は、位置測定の精度の尺度として使用することができる。ひとたび係数が法線ベクトルの長さによってスケーリングされると、各センサについてこの距離をAx+By+Cz−Dとして算出することができる。各平面から算出された位置までの距離の平均値は、全てのセンサが算出された位置で合致する程度の尺度をもたらす。
【0108】
方程式の優決定系は、最小2乗解アルゴリズムを用いて解くことができる。適切な最小2乗アルゴリズムは、市販の数学ソフトウェアパッケージの構成要素として入手可能である。
【0109】
任意選択的に、当業界で公知の方程式の組を解く他の方法を使用する。任意選択的に、1組の方程式の代わりに、他の計算方法、例えばニューラルネットワーク、ルールベース方法、およびセンサからの信号を使用して結果的に得られる位置を探索または推定するテーブルルックアップ方法を使用する。センサが線形的に移動するシステムでは、他の解決方法、例えばセンサの線形位置を線源の空間座標に変換する方法を使用することができる。
【0110】
システム40および方法400の精度および性能を高めるために、任意選択的に事前較正を実行することができる。システムの機械的製造に基づく値に依存するのではなく、各々のセンサモジュール20の位置および方位を較正することができる。較正手順は、システム40を使用して、高精度に画定された多数の既知の位置で線源38の3次元位置を測定することを含む。線源38の位置は既知であるため、これらの値を解くためにセンサの位置および方位を未知数として位置を計算するために、通常使用される方程式(上述)を使用することができる。様々な最小化手順が当業界で公知である。そのような較正を実行するために必要な測定の回数は、未知数より多数の方程式を提供するのに充分な測定を行うのに有用であるため、システム40におけるセンサモジュール20の個数に依存するかもしれない。この較正手順はまた、システム40が線源の位置を測定するときの基準の原点およびフレームをも画定し、したがって追跡システムと、蛍光X線透視システムまたは他の撮像システムのようなそれが永久に取り付けられる別のシステムとの間のアラインメントを達成することができる。
【0111】
本発明の例示的実施形態では、ひとたび線源の位置が分かると、センサは線源に向けたままに維持し、それらの方位を変えないでおくことができる。任意選択的に、例えば検出される放射線の有意の変化(例えば30%、50%、70%、90%、もしくはそれ以上の降下、または中間的降下)によって決定されるように、線源が移動する場合、線源が存在すると予想される角度範囲を走査するようにセンサを動かす。任意選択的に、センサは、例えば下述するように、線源がセンサのどちら側に位置するかを示す信号を生成する。任意選択的に、走査の範囲は、例えば履歴に基づく手順、および/またはユーザ閾値に基づく手順に基づいて、線源の予想される角速度によって異なる。範囲内の走査が失敗した場合、任意選択的に範囲を増大する。
【0112】
任意選択的に、複数の目標線源(例えば異なる計数レートおよび/または異なる放出エネルギを持つもの)が設けられた場合、センサは目標角度間をジャンプする。任意選択的に、2つ(またはそれ以上)の線源を包含する角度間の定常掃引を行う。任意選択的に、掃引は、例えば1秒の1倍、5倍、10倍、20倍、50倍またはそれ以上の倍数の角度範囲を含む、超音波またはセンサまたはその一部分の音波振動によって行われる。任意選択的に、振動の振幅が角度範囲を決定する。任意選択的に、センサまたはセンサ部分が1つまたはそれ以上の振動周波数と共振する。
【0113】
任意選択的に、10度未満または5度未満または1度未満のような少なくとも小さい角度範囲のセンサの走査は、センサが目標線源上に固定されている場合でも行われる。
【0114】
上述したようにイリジウム192を線源38として使用するシステム40の追跡精度を、コンピュータシミュレーションのみによって評価した。シミュレーションは、モデルの頭部内の線源38によって放出され、かつ図5に示した型の複合差分センサユニット20内の光子感受性要素22によって吸収される、ガンマ光子のランダム分布のモデルである。シミュレーションによると、光子が検出器22によって吸収されるたびに新しい回転角32が画定されるように、センサモジュール20の放射線検出器22は回転する。光子が正の放射線検出器21によって吸収される場合には、センサモジュール20の放射線検出器22は正の方向に回転し、それが負のセンサ23によって吸収される場合には、センサモジュール20の放射線検出器22は負の方向に回転する。センサモジュール20の総出力信号34は、サンプル時間中のその平均方位である。
【0115】
シミュレーションでは、性能は2つのパラメータによって定義されるが、実際のシステムでは他のパラメータを使用することができる。
1)目標が静止している場合、2乗平均平方根(RMS)誤差
2)線源38の実際の位置が10mm変化した後、計算位置の9mmの変化を示すまでの時間
【0116】
以下のパラメータ値はシミュレーションでは一定であった。
1)線源からセンサまでの距離=25cm(最悪の場合の距離)
2)センサが幾何学的に最適化される場合の線源の距離=25cm
3)各サブセンサの光子感受性表面の幅=2mm(図5の18)
4)センサの長さ=10cm(図5の14)
5)センサ間の分割壁の高さ=5cm(図5の35)
6)分割壁の基部の幅=4mm(図5の37)
7)複合センサの壁によって画定されるサブセンサの個数=7(図5の36)
8)センサ感度(入射するガンマ線のうち検出される分)=0.3
【0117】
シミュレーションは、以下のパラメータを性能に対する影響に関して評価し、最適化した。
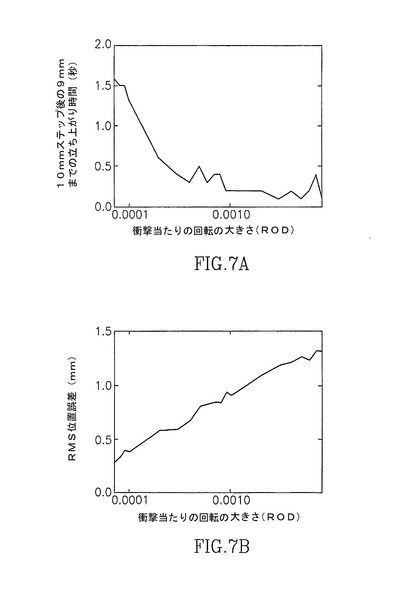
1)吸収される光子1個当たりの回転の大きさ(図7Aおよび7B)
2)サンプル時間(図8Aおよび8B)
3)1秒当たりの光子数(線源の放射能レベル)(図9Aおよび9B)
4)総合追跡精度(図10Aおよび10B)
【0118】
シミュレーションから、光子の1回の衝突当たりの回転が大きくなると、応答時間が改善されることが決定された(図7A)。しかし、光子の1回の衝突当たりの回転が増大すると、RMS位置誤差も増大する(図7B)。明らかに、レイテンシと精度との間にトレードオフがある。このパラメータは、下述する移動検出アルゴリズムを用いてトレードオフを最適化するために、実時間で変更することができる。
【0119】
シミュレーションは、サンプル時間がレイテンシにも精度にも有意の影響を及ぼさないことを決定した(図8Aおよび8B)。これは、1回の衝突当たりの回転が小さい値である場合、サンプル当たりの衝突の回数も精度に最小限の影響を持ち、レイテンシ(1サンプル当たりの回転の総量)を決定するだけであることによる。しかし、サンプル時間の低減の結果、サンプル当たりの衝撃の回数が減少すると、サンプル時間の低減はレイテンシを変化させずに、サンプル当たりの低減される応答を正確に補償する。
【0120】
放射能(毎秒放出される光子の数)は精度に非常にわずかな効果を持ち、放射能が0.01mCiから0.5mCiに増大したときに、精度は2倍に改善するだけである(図9B)。急激な回転を誘発するだけの充分な光子が単に無いだけの低い放射能レベルでは、それは応答時間に劇的な効果を有する(図9A)が、0.1mCiより高い放射能レベルでは、放射能レベルの増加により最小限の改善がある。レイテンシと精度との間のこのトレードオフの最適化は(以下参照)は、0.05mCiで達成される。この特定の放射能は性能と放射線量との間の適正な妥協をもたらし、患者または医師に安全上のリスクを課すことなく、一般的な医療用途に適した性能を達成する。
【0121】
精度とレイテンシとの間のトレードオフを最適化するために、移動検出アルゴリズムを使用して、追跡される線源38の移動中は光子当たりの回転を増大させた。これはレイテンシ時間を低減させ、かつ精度を増大させた。シミュレーションでは、正21と分類される受容要素22に衝突する光子の負23と分類されるものに対する百分率を、追跡される線源38の移動の標識として使用した。百分率が50%から遠くに離れるにつれて、光子当たりの回転は増大し、移動中は精度を犠牲にしてレイテンシを低減した。換言すると、システム40は最初、推定される目標回転角32に向かって大きい間隔で移動する。推定される目標回転角32に近づくにつれて、間隔の大きさは低減される。目標回転角32を通過すると、反対方向の小さい補償間隔が使用される。結果を図10Aおよび10Bにグラフで要約する。簡単に言うと、移動する線源38を追跡するシステム40のRMS誤差は平均0.71mmである。静止線源38のシステム40による位置標定は0.62mmのrms誤差を生じる。
【0122】
要約すると、シミュレーション結果は、192イリジウムの0.05mCiの放射能、図5に示した型の複合差分センサ、およびレイテンシと精度との間のトレードオフを行う移動検出アルゴリズムにより、システム40が約1mmRMSの総合精度を達成することができることを示している。
【0123】
回転角32の変化に対するセンサモジュール20のシミュレーション感度を、図12に示す。それは、図5に示した型のセンサの目標回転角32に対する回転の関数として出力信号34のプロットである。このグラフは次式を用いて生成された。
総出力34=A/(A+B)
ここでAは全ての右側センサ21の和であり、Bは全ての左側のセンサ23およびBの和である。
【0124】
センサ20からの出力34の全範囲(Y軸)は随意に0から1の範囲であると定義した。X軸上で、0は線源38の方向を指す回転角32を示す。センサ20の全回転範囲は、目標回転角32から±32ミリラジアンであった。目標回転角32から32ミリラジアン以上逸脱すると、目標回転角32に到達するための回転の量ではなく、目標回転角32に戻るための回転の方向を示す、0または1のいずれかの出力34を生じる。出力34が0または1である場合、目標回転角32からの逸脱に関して引き出すことのできる唯一の結論は、それが示された方向に32ミリラジアンより大きいことである。
【0125】
図12のグラフは、目標回転角32の出力34を動的範囲の中間として(0.5)として表わす。したがって、出力34が0.6である場合、目標回転角32を達成するためにプラス方向に10ミリラジアンの補正回転を示している。0.6の出力34は、同じ大きさ(10ミリラジアン)であるが、マイナス方向の補正回転を示す。同じ情報を表わす別の方法は、+0.5から−0.5の全動的範囲をY軸上に示すことである。この範囲の中間は零とすることができ、1つの方向は正、もう1つは負であり、あるいは1つの方向がより高く、他の方向がより低い、随意の数字とすることができる。
【0126】
図12に示すように、目標角32で回転に対するセンサ20のシミュレーション感度は、1ミリラジアンの回転当たり動的範囲の約1%である。
【0127】
1ミリラジアン当たりのこの1%の感度は、放射線検出器22の間に分散され0.05mCiの放射能を持つ線源38から25cm離して配置された5cmの高さ35を有するシールド36付きの5cm×10cmのセンサモジュール20を用いて、所望の精度(1mm rms)を達成するのに充分である。精度パラメータを調整し、検出器22のサイズを増大し、センサ20と線源38との間の距離を低減し、線源38の放射能を増大することは各々、センサ20に望ましい方向感度のレベルを低減するように働くことができる。
【0128】
図6Aに示した種類のセンサ20を使用したシミュレーション結果(図示せず)は、本書で上述したものと同様であった。
【0129】
システム40および/またはセンサ20は、様々なコマンドの実行、ならびに様々なデータ入力の解析および変換に依存する。これらのコマンド、解析、または変換は、様々な代替的実施形態に従って、ソフトウェア、ハードウェア、またはファームウェアによって達成することができる。本発明の例示的実施形態では、機械可読媒体は、任意選択的に方法400に従って、1つまたはそれ以上のセンサモジュール20からの出力信号34を線源38の位置座標に変換するための命令を含む。本発明の例示的実施形態では、CPU42は、任意選択的に方法400に従って、1つまたはそれ以上のセンサモジュール20からの出力信号34を線源38の位置座標に変換するための命令を実行する。
【0130】
本発明の例示的実施形態では、追跡可能な医療装置は、検出可能な量の放射性同位元素を医療装置に組み込むかあるいは固着することによって製造される。放射性同位元素は、様々な実施形態に従って医療機能を持っても持たなくてもよい。任意選択的に、同位元素の放射能は医療機能を持たない。任意選択的に、放射性同位元素は、保護コーティング無しで、組織との有害な反応を生じることなく、体内で使用することができるように選択することができる。本発明の例示的実施形態では、同位元素の検出可能な量は、0.5mCiから0.001mCiの範囲内である。この範囲の下部の放射能を持つ同位元素線源38の使用は、装置の低い速度、検出器22の感度、センサ20からの距離に依存するかもしれない。任意選択的に、少なくとも1、任意選択的に少なくとも5、任意選択的に少なくとも10、任意選択的に少なくとも100の検出可能な1秒当たりの計数が、組み込まれた放射性同位元素によって生成される。
【0131】
本願の説明および請求の範囲において、動詞「備える(comprise)」、「含む(include)」、および「有する(have)」の各々は、それらの活用形も含めて、動詞の目的語が必ずしも動詞の主語の構成員、構成要素、要素、または部分の完全なリストではないことを示すために使用される。
【0132】
本発明をその実施形態の詳細な説明を用いて説明したが、それは単なる実施例として提示したものであって、必ずしも本発明の範囲を限定するように意図されていない。説明された実施形態は様々な特徴を備えるが、それらの全てが本発明の全ての実施形態に必要なわけではない。本発明の一部の実施形態は、特徴の一部または特徴の可能な組合せだけを利用する。説明した本発明の実施形態の変形、および記述した実施形態に示した特徴の異なる組合せを含む本発明の実施形態は、1つの実施形態で述べた特徴をいずれかの他の実施形態の文脈で使用することを含め、それに限らず、全ての可能な組合せに結合することができる。本発明の範囲は、付属する特許請求の範囲によってのみ限定される。
【図面の簡単な説明】
【0133】
【図1】本発明の例示的実施形態に係るセンサモジュールの1つの実施形態の側面図である。
【図2】本発明の例示的実施形態に係るコンピュータ化追跡システムの略図である。
【図3】モジュールによる信号の受信を示す、本発明の例示的実施形態に係るセンサモジュールの追加の実施形態の側面図である。
【図4】患者に対するセンサモジュールの1つの可能な配置を示す、本発明の例示的実施形態に係るコンピュータ化追跡システムの斜視図である。
【図5】本発明の例示的実施形態に係るセンサモジュールの追加の実施形態の側面図である。
【図6】本発明の例示的実施形態に係るセンサモジュールのさらなる追加の実施形態の側面図である。
【図7】本発明の例示的実施形態に係るシステムを使用して、光子の1回の衝突当たりのセンサの回転の関数としてそれぞれプロットされたシミュレーション応答時間およびシミュレーションrms位置のグラフである。
【図8】本発明の例示的実施形態に係るシステムを使用して、サンプリング時間の関数としてそれぞれプロットされたシミュレーション応答時間およびシミュレーションrms位置のグラフである。
【図9】本発明の例示的実施形態に係るシステムを使用して、放射性信号源の比放射能の関数としてそれぞれプロットされたシミュレーション応答時間およびシミュレーションrms位置のグラフである。
【図10】図10Aは、時間の関数としての位置のグラフである。図10Bは、図10Aの2つのプロットに基づいて時間の関数としてプロットされたrms位置誤差のグラフである。
【図11】本発明の例示的実施形態に係る方法の簡易流れ図である。
【図12】回転角の関数としてのセンサ出力のグラフである。
【技術分野】
【0001】
関連出願
本願は、米国特許法第119条(e)項に基づき、「Medical Navigation System Base on Differential Sensor」と称する2004年8月12日出願の米国特許仮出願第60/600725号、「Using a Catheter or Guidewire Tracking System」と称する2004年10月19日出願の第60/619792号、および「Using a Radioactive Source as the Tracked......」と称する2004年10月19日出願の第60/619897号の特典を主張し、それらの開示内容を参照によって本書に援用する。
【0002】
発明の分野
本発明は、例えば被験者の体内の電離放射線源の位置標定および追跡に関する。
【背景技術】
【0003】
体内追跡のための既存の技術は、腹腔鏡を使用する直接ビデオ撮像、蛍光X線透視法(連続または周期的X線撮像法による処置の実行)、電磁追跡、光学追跡、コンピュータ断層撮影(CT)追跡および超音波画像支援追跡を含む。これらの技術の一部は、電離放射線を明示的に回避する。蛍光X線透視法およびCTのような電離放射線を使用する技術は、充分な量の電離放射線を必要とするため、被験者および医療スタッフの放射線被曝が懸念される。
【0004】
心臓カテーテル法のような体内追跡を必要とする一部の用途は、追跡される医療装置がその中をナビゲートされる組織が頻繁に動くため、同時取得画像を必要とする。頭蓋内処置のような体内追跡を必要とする他の用途は、関連組織が比較的静止しているため、事前に取得した画像を使用するのにより適している。
【発明の開示】
【0005】
本発明の一部の実施形態の態様は、画像を生成することなく、任意選択的に被験者の身体の内部または付近のその位置を検出するために、線源からの電離放射線を使用することに関する。任意選択的に、線源は医療装置と一体的に形成されるか、あるいはそれに取り付けられる。医療装置は、器具、インプラント、ナビゲーション装置、および導管を含むが、それらに限定されない。
【0006】
本発明の例示的実施形態では、線源の位置は非撮像データ取得によって決定される。この明細書および付属の特許請求の範囲を目的として、語句「非撮像」とは、線源および解剖学的または他の非線源特徴を同一画像内に含む画像取得プロセスとは独立して取得されるデータを指す。
【0007】
任意選択的に、位置は、線源からの実効入射角に応じて放射線検出から結果的に得られる出力の検出可能な変化を生じる角感度を有するセンサを使用して決定される。実効入射角の感度が高ければ高いほど、速度および精度に関して位置決定の高い効率が達成される。±100ミリラジアン未満、任意選択的に±50ミリラジアン未満の角度範囲の実施形態を開示する。本発明の例示的実施形態では、放射線検出器および/またはシールドを移動させることによって、実効入射角に対するより高い感度を達成することができる。
【0008】
任意選択的に、電離放射線源は、0.01mCiないし0.5mCiの範囲の放射能を有する。任意選択的に、電離放射線源は0.1mCi未満の放射能を有する。任意選択的に、電離放射線源は約0.05mCiの放射能を有する。本発明の例示的実施形態では、患者(つまり短期被曝)および/または医療担当者(つまり長期被曝)に著しい健康リスクをもたらさない放射線源を使用することができる。
【0009】
任意選択的に、位置データのリフレッシュ速度は、位置情報が一時的に追跡される物体(例えば医療装置)の実際の位置によく相関することを確実にする。推薦リフレッシュ速度は、追跡される物体が移動する速度に応じて、かつ追跡される物体が移動する環境に応じて変動する。本発明の例示的実施形態では、脳または消化管のようなより静的な身体部分における医療装置の追跡の場合、より低いリフレッシュ速度、例えば10回/秒が適しているかもしれない。心臓のような頻繁に動く身体部分における医療装置を追跡する場合の実施形態では、より高いリフレッシュ速度、例えば20回/秒が望ましいかもしれない。任意選択的に、選択された心周期位相から位置がプロットされるように、ECG出力のゲーティングを実現することができる。
【0010】
任意選択的に、電離放射線源の算出された位置のRMS誤差は10mm未満であり、任意選択的に5mm未満であり、任意選択的に2mm未満であり、任意選択的に1mm未満であり、任意選択的に0.5ないし0.8mmまたはそれ以下である。
【0011】
決定される位置の精度に影響を及ぼす変数として、DPM単位の線源の放射能、検出に使用される放射線センサの精度および/または応答時間、ならびに植え込まれた医療装置の速度が挙げられる。これらの変数の1つまたはそれ以上の改善は、1つまたはそれ以上の他の変数を補償することがある。任意選択的に、追跡される医療装置の速度の低下は、他の変数を補償するために使用することができる。任意選択的に、解剖学的撮像データを背景にして位置情報が表示される。任意選択的に、関連する解剖学的特徴をハイライトして、医療担当者による医療装置のナビゲーションを容易にする。任意選択的に、決定された位置は、別個に取得された画像を背景にして表示することができる。
【0012】
任意選択的に、2つまたはそれ以上の線源を同時に追跡することができる。任意選択的に、非対称医療装置の向きを決定するのに、多重線源追跡が使用される。任意選択的に、多重線源追跡は、2つまたはそれ以上の医療装置の放射能を医療処置のために調整するのに使用される。
【0013】
本発明の一部の実施形態の態様は、電離放射線源の方向を検出する角感度を持つセンサの使用に関係する。任意選択的に、方向の交点を算出することによって位置を決定することができるように、2つまたは3つの方向が同時にまたは逐次的に決定される。3つまたはそれ以上の方向を使用する場合、位置は3次元位置として表現することができる。任意選択的に、方向は、線源が存在する平面を決定するために使用される。
【0014】
任意選択的に、線源からの放射線を検出するためのセンサは、軸を中心とする回転角のセンサの少なくとも一部分の回転によって所望の角感度を達成する。例えば、検出器または放射線シールドを回転させることができる。代替的にまたは追加的に、センサは並進運動によって所望の角感度を達成することができる。
【0015】
本発明の一部の実施形態の態様は、検出器と線源との間の実効入射角に応答して少なくとも1つの放射線検出器からの出力信号の変化を引き起こす角感度を持つセンサに関する。出力信号の目標値は、線源の方向を示す角度で達成される。該方向は任意選択的に、線源が存在する面を決定するために使用される。
【0016】
任意選択的に、センサは、各々が別個の出力信号を有する放射線検出器を2つ以上含むことができる。任意選択的に、放射線検出器の少なくとも1つの少なくとも一部分を入射放射線から遮蔽または遮断するために、1つまたはそれ以上の放射線シールドを使用することができる。線源の方向を示す角度からの偏差が生じるにつれて、遮蔽度は変化し、出力信号は遮蔽度に応じて変化する。
【0017】
任意選択的に、コリメータを形成するように複数の放射線シールドが連携して使用される。放射線シールドは相互に平行であるか、または内向きに傾斜することができる。任意選択的に、平行であるか傾斜しているかにかかわらず、複数の放射線シールドを回転させることができる。
【0018】
任意選択的に、目標出力からの偏差は、線源の方向を示す角度からの角変位1ミリラジアン当たり出力範囲の1%である。任意選択的に、出力の偏差は偏差の方向のみならず偏差の大きさをも示す。本発明の様々な実施形態では、放射線検出器および/または放射線シールドは、角感度を与えるように変位させることができる。この変位は回転および/または並進とすることができる。
【0019】
本発明の一部の実施形態の態様は、センサモジュールの角感度を使用して方向を決定することによって、任意選択的に被験者の体内にある、医療装置を位置標定するためのコンピュータ化システムに関する。センサモジュールは、1つまたはそれ以上の放射線検出器に入射する放射線を測定する。入射放射線は出力信号を生成し、それはシステムによって方向情報に変換される。
【0020】
本発明の一部の実施形態の態様は、任意選択的に医療装置が医療処置中に被験者の身体の内部または付近をナビゲートされるときに、電離放射線源と医療装置とを関連付けて、装置の位置の決定を促進することに関する。任意選択的に、電離放射線源は0.01mCiから0.5mCiの範囲の放射能を有する。任意選択的に、電離放射線源は0.1mCi未満の放射能を有する。任意選択的に、電離放射線源は約0.05mCiの放射能を有する。関連付けは、線源および装置を単一のユニットとして一体的に形成することを含む。関連付けはまた、線源を装置に取り付けることを含む。任意選択的に、線源は10mm未満、任意選択的に5mm未満、任意選択的に2.5mm未満、任意選択的に1mm未満の最大寸法を有する領域に集中する。
【0021】
本発明の一部の実施形態の態様は、任意選択的に医療の文脈で、非撮像位置標定または追跡のための標的として、0.1mCi以下の放射能を持つ電離放射線源を使用することに関する。電離放射線源は、患者および/または医療担当者への生物学的影響を低減するように選択される。この選択は、放射線の強度、放射線の種類、および/または被曝時間の量(例えば処置を受ける患者の体内にある時間)についての考慮を含む。代替的にまたは追加的に、生体適合性材料から構成され、かつ/または生体適合性コーティングを被覆された放射線源を使用することができる。
【0022】
本発明の例示的実施形態では、電離放射線源を追跡および位置標定するためのコンピュータ化システムを提供する。該システムは、
(a)放射線源から電離放射線を受け取って出力信号を生成することのできる少なくとも1つの放射線検出器を備えた、少なくとも1つの非撮像センサモジュールと、
(b)出力信号を受け取って出力信号を方向情報に変換するように設計および構成されたCPUと、
を備える。
【0023】
任意選択的に、放射線源は医療装置と一体的に形成されるか、あるいは医療装置に取り付けられる。
【0024】
任意選択的に、少なくとも1つのセンサモジュールは少なくとも2つのセンサモジュールを含む。
【0025】
任意選択的に、少なくとも2つのセンサモジュールは少なくとも3つのセンサモジュールを含む。
【0026】
任意選択的に、少なくとも1つのセンサモジュールのうちの少なくとも1つは、センサモジュールを新しい位置に移動させるようにセンサモジュールに並進運動をもたらすことのできる推進装置をさらに備える。
【0027】
任意選択的に、推進装置はCPUからの並進運動信号によって動作可能である。
【0028】
任意選択的に、システムは追加的に、画像信号をCPUに提供することのできる撮像モジュールを備え、CPUは画像信号を被験者の身体の一部分の画像に変換することができる。
【0029】
任意選択的に、システムはさらに表示装置を備える。
【0030】
任意選択的に、表示装置は、被験者の身体の一部分の画像を、その上に医療装置の決定された位置を重ね合わせた状態で、表示することができる。
【0031】
任意選択的に、CPUは出力信号の少なくとも2つを受け取り、出力信号に基づいて放射線源の位置を算出する。
【0032】
任意選択的に、CPUは出力信号の少なくとも3つを受け取り、少なくとも3つの出力信号に基づいて放射線源の位置を算出する。
【0033】
任意選択的に、CPUは、放射線源位置が時間の関数としてプロットされるように、間隔をおいて位置を繰返し算出する。
【0034】
任意選択的に、放射線源は6ヶ月から18ヶ月の範囲の半減期を持つ同位元素を使用する。
【0035】
任意選択的に、システムは放射線を提供することのできる放射線源をさらに備える。
【0036】
任意選択的に、線源が0.01mCiから0.5mCiの範囲の放射能を有するときに、方向情報が生成される。
【0037】
本発明の例示的実施形態では、電離放射線源を方向的に位置標定するためのセンサを提供する。該センサは、
(a)少なくとも1つの機能構成部品と、
(b)少なくとも1つの機能構成部品を移動させることによって、センサに角感度を与える変位機構と、
を備える。
【0038】
任意選択的に、少なくとも1つの機能構成部品は、放射線源からの放射線を受け取りかつ出力信号を生成することのできる少なくとも1つの放射線検出器を備え、
変位機構は、出力信号が回転角により変化するように、少なくとも1つの放射線検出器を回転角だけ回転させることができる。
【0039】
任意選択的に、少なくとも1つの放射線検出器は少なくとも1つの第1放射線検出器および少なくとも1つの第2放射線検出器を備え、出力信号は、少なくとも1つの第1放射線検出器からの少なくとも1つの第1出力信号、および少なくとも1つの第2放射線検出器からの少なくとも1つの第2出力信号を含む。
【0040】
任意選択的に、センサは、少なくとも1つの第1放射線検出器からの第1出力信号の大きさおよび第2放射線検出器からの第2出力信号の大きさが回転角により変化するように、少なくとも1つの第1放射線検出器および少なくとも1つの第2放射線検出器に対して一定の角度に設置された少なくとも1つの放射線シールドを備える。
【0041】
任意選択的に、センサは、
(a)各々が放射線源から放射線を受け取り、少なくとも1つの第1放射線検出器から少なくとも1つの第1出力信号を生成し、かつ少なくとも1つの第2放射線検出器から少なくとも1つの第2出力信号を生成することのできる、少なくとも1つの第1放射線検出器および少なくとも1つの第2放射線検出器と、
(b)少なくとも1つの第1放射線検出器からの第1出力信号の大きさおよび第2放射線検出器からの第2出力信号の大きさが各々シールドの回転角により変化するように、シールドの回転軸を中心にシールド回転角だけ回転可能である少なくとも1つの放射線シールドと、
を備える。
【0042】
任意選択的に、少なくとも1つの放射線シールドは、
(i)少なくとも1つの第1放射線検出器と少なくとも1つの第2放射線検出器との間に配置された一次放射線シールドと、
(ii)少なくとも1つの第1放射線検出器の方向に向けられた入射放射線を妨げるように展開された少なくとも1つの第1の追加放射線シールドと、
(iii)少なくとも1つの第2放射線検出器の方向に向けられた入射放射線を妨げるように展開された少なくとも1つの第2の追加放射線シールドと、
を備える。
【0043】
任意選択的に、少なくとも1つの第1の追加放射線シールドおよび少なくとも1つの第2の追加放射線シールドは各々、一次放射線シールドの方向に傾斜する。
【0044】
任意選択的に、少なくとも1つの第1放射線検出器および少なくとも1つの第2放射線検出器は対として編成され、各対は第1部材および第2部材を有し、一次および追加放射線シールドの各放射線シールドは、出力信号が回転角により変化するように、対の1つの第1部材の1つと第2部材の1つとの間に配置される。
【0045】
任意選択的に、センサは追加的に、回転軸を中心に回転角だけ少なくとも1つの機能構成部品を回転させることができる。
【0046】
本発明の例示的実施形態では、装置の位置を決定する方法を提供する。該方法は、
(a)関連付けられた放射線源を有する装置を提供するステップと、
(b)放射線源に対する方向を決定するステップと、;
(c)放射線源に対する少なくとも第2方向をさらに決定するステップと、
(d)第1の方向と少なくとも第2の方向の交点を算出することによって装置を位置標定するステップと、
を含む。
【0047】
任意選択的に、放射線源に対する少なくとも第2方向をさらに決定するステップが、放射線源に対する第3方向を決定するステップを含み、かつさらに、
(e)第1方向、第2方向、および少なくとも第3方向の交点を算出するステップ、
を含む。
【0048】
本発明の例示的実施形態では、追跡可能な医療装置を製造する方法を提供する。該方法は、検出可能な量の放射性同位元素を医療装置に組み込むか、あるいは固定して取り付けるステップを含む。
【0049】
任意選択的に、検出可能な量は0.01mCiから0.5mCiの範囲内である。
【0050】
任意選択的に、検出可能な量は0.1mCi以下である。
【0051】
任意選択的に、検出可能な量は0.05mCi以下である。
【0052】
任意選択的に、同位元素はイリジウム192である。
【0053】
本発明の一部の実施形態の態様は、非撮像位置標定または追跡の標的として0.1mCi以下の放射能を持つ電離放射線源を使用することに関する。
【0054】
図面の簡単な説明
図では、2つ以上の図に現われる同一の構造、要素、または部品は一般的に、それらが現われる全ての図で、同じ符号で標識される。図に示す構成部品および特徴の寸法は、提示し易く、かつ分かり易いように選択され、必ずしも縮尺通りではない。図を以下に列挙する。
図1は、本発明の例示的実施形態に係るセンサモジュールの1つの実施形態の側面図である。
図2は、本発明の例示的実施形態に係るコンピュータ化追跡システムの略図である。
図3は、モジュールによる信号の受信を示す、本発明の例示的実施形態に係るセンサモジュールの追加の実施形態の側面図である。
図4は、患者に対するセンサモジュールの1つの可能な配置を示す、本発明の例示的実施形態に係るコンピュータ化追跡システムの斜視図である。
図5は、本発明の例示的実施形態に係るセンサモジュールの追加の実施形態の側面図である。
図6Aおよび6Bは、本発明の例示的実施形態に係るセンサモジュールのさらなる追加の実施形態の側面図である。
図7Aおよび7Bは、本発明の例示的実施形態に係るシステムを使用して、光子の1回の衝突当たりのセンサの回転の関数としてそれぞれプロットされたシミュレーション応答時間およびシミュレーションrms位置のグラフである。
図8Aおよび8Bは、本発明の例示的実施形態に係るシステムを使用して、サンプリング時間の関数としてそれぞれプロットされたシミュレーション応答時間およびシミュレーションrms位置のグラフである。
図9Aおよび9Bは、本発明の例示的実施形態に係るシステムを使用して、放射性信号源の比放射能の関数としてそれぞれプロットされたシミュレーション応答時間およびシミュレーションrms位置のグラフである。
図10Aは、時間の関数としての位置のグラフである。本発明の例示的実施形態に係るシステムから出力されるシミュレーション位置が、シミュレーションの実際の入力位置の上に重ねられる。
図10Bは、図10Aの2つのプロットに基づいて時間の関数としてプロットされたrms位置誤差のグラフである。
図11は、本発明の例示的実施形態に係る方法の簡易流れ図である。
図12は、回転角の関数としてのセンサ出力のグラフである。
【発明を実施するための最良の形態】
【0055】
本発明の1つの実施形態では(図2および4)、コンピュータ化システム40は装置を位置標定および/または追跡する。図4に示す実施形態では、装置は医療装置である。該医療装置は、器具、インプラント、ナビゲーション装置、および導管を含むが、それらに限定されない。器具はカテーテル、カニューレ、トロカール、切断具、把持具、および位置決め具を含むがそれらに限定されない。インプラントは密封小線源シード、ステント、および徐放性薬物治療パケットを含むが、それらに限定されない。ナビゲーション装置はガイドワイヤを含むが、それに限定されない。導管はチューブ類(例えば食道管および気管チューブ)を含むが、それらに限定されない。本発明の例示的実施形態では、1つまたはそれ以上の移動する器具を追跡する。
【0056】
本発明の例示的実施形態では、線源の位置は、非撮像データ取得によって決定される。この明細書および付属の特許請求の範囲を目的として、語句「非撮像」とは、線源および解剖学的または他の非線源特徴を同一画像内に含む画像取得プロセスの一部として取得されないデータを指す。任意選択的に、撮像回路に適さず、それに接続されないセンサを使用する。撮像は、少なくとも1つの関心点を含む多数の点に関する情報に依存し、情報の画像解析により、関心点の特徴、例えば物体に関連する位置を決定する。本発明の例示的実施形態では、位置感知により線源のみに関する情報を提供する。これは検出能および/または精度を改善することができる。
【0057】
任意選択的に、医療装置は、その位置が決定される経路の少なくとも一部分にあるときに、少なくとも部分的に被験者54の体内にある。図4には、システム40が頭蓋内医療処置中に被験者54の頭内の装置を追跡するように構成された、例示的実施形態が示されている。この図面は純粋に例示であって、本発明の範囲の限定と解釈すべきではない。
【0058】
図2は、連携して作動する角度検出に依存して放射線源38の位置を決定する3つのセンサモジュール20を含む、システム40の実施形態を示す。図示した実施形態では、センサ20の各々は、線源38の方向を示す回転角32を決定する。この回転角32(図1)は、線源38が存在する平面であって放射線検出器22と交わる平面を画定する。回転角32は出力信号34として提供され、それはコンピュータ化処理装置(CPU)42に中継される。CPU42は、点で表わされる3つの方向(平面)の交差部を決定する。
【0059】
本発明の一部の実施形態では、センサモジュール20の放射線検出器22が一連の回転角32だけ回転するときに、センサ20の検出の境界24(図1)内に位置する線源38をシステム40によって正確に位置標定することができる。境界24の外に位置する線源38は正確に位置標定されない。この理由から、一部の実施形態では、線源38の予想経路が境界24内に位置するように、センサ20の各々を展開することが望ましい。本発明の一部の実施形態では、線源38を境界24内に維持するように、センサ20を動かすことができる。境界24のサイズおよび形状は、センサ20の構成によって変化する。
【0060】
目標回転角32の決定の精度は、システム40によって決定される線源38の位置標定の精度に貢献する。感度を回転角32の小さい差に高めることのできるセンサモジュール20の様々な変形を、図3、5、6A、および6Bに例示的実施形態として図示し、以下でさらに詳しく説明する。
【0061】
図4は、角度検出を使用し、円58の外周上に分散された3つのセンサモジュール20を含む、例示的システム40の斜視図を提示する。図示した実施形態では、モジュール20は放射線シールド36を特徴とする。図示した実施形態で、各モジュール20は円58に接する軸を中心に回転する。この回転により、以下でさらに詳述するように医療装置の追跡が可能になる。本発明の様々な実施形態では、所望の角度検出を促進するために、回転運動または並進運動を使用することができる。図4に示した実施形態では、センサモジュール20の平面と頭内の関心領域との間の垂直距離が円58の半径にほぼ等しくなるように、センサモジュール20は被験者54の頭の下に配置される。この配置は、線源38の予測経路が境界24内に位置するように、センサ20の各々が展開されることを確実にする。この配置は、円58の中心に高くなったヘッドレストを装備したボード上に設けられた3つのセンサ20を提供することによって、反復可能にかつ容易に達成することができる。これは任意選択的に、広範囲に及ぶ測定手順無しに、被験者54がセンサ20に対して正しく配置されるように、リクライニングチェアまたは調整可能な診察台を容易に配置することを可能にする。
【0062】
システム40の位置標定ボリュームは、線源38の位置を決定することのできる空間座標の組である。システム40の位置標定ボリュームは、センサ20の位置、それらの設計、および/またはそれらの性能特性に依存するサイズおよび/または形状を有する。任意選択的に、システム40の位置標定ボリュームは、センサ20の検出の境界24の交差として表わすことができる。任意選択的に、複数の組のセンサ20を使用することによって、2つまたはそれ以上の位置標定ボリュームを形成することができる。任意選択的に、これらの位置標定ボリュームを重ね合わせることができる。
【0063】
放射線源38の質量の中心の3次元位置は、各々のモジュール20の既知の位置および回転角を前提として、各々のセンサモジュール20によって測定された角度32から、CPU42によって算出される。本発明の一部の実施形態では、線源38は1ないし10mmの長さの1本のワイヤである。この長さ範囲は、有用な直径を持つワイヤとして供給され、システム40の効率的な動作を可能にする充分なDPM数を提供することのできる、現在利用可能な固体同位元素源38を反映している。システム40は、このワイヤ片38の真ん中の位置を決定し、決定された位置を任意選択的に誤差限界を示す単一点まで分解する。
【0064】
センサモジュール20は少なくとも1つの放射線検出器22を含む。放射線検出器22は、医療装置に取り付けられた放射線源38から放射線を受け取り、出力信号34を生成することができる。放射線検出器22は、入射放射線をCPU42に中継することのできる信号に変換する任意の技術を使用することができる。線源38がガンマ放射線源である場合、放射線検出器22は例えば、電離箱、ガイガー・ミューラー計数管、シンチレーション検出器、半導体ダイオード検出器、比例計数管、またはマイクロチャネルプレートに基づく検出器とすることができる。様々な種類の放射線検出器22が、例えばEVproducts(米国ペンシルベニア州サクソンバーグ)、浜松ホトニクス(日本国静岡県浜松市)、Constellation Technology(米国フロリダ州ラーゴ)、Soltec Corporation(米国カリフォルニア州サンフェルナンド)、Thermo Electron Corporation(米国マサチューセッツ州ウォルサム)、Bruker‐biosciences(米国マサチューセッツ州ビルリカ)、Saint Gobain crystals(米国オハイオ州ニューベリ)、およびSilicon Sensor GMBH(ドイツ国)から市販されている。適切な市販の放射線検出器22を、センサ20の一部としてシステム40の文脈に組み込むことができる。少数のDPMを生成する線源38および優れた感度(つまりCPMとDPMとの間の高い比率)をもたらすS型の検出器22に依存する本発明の実施形態は、センサモジュール20の性能を改善する。センサ20と線源38との間の距離が増大すると、この考慮事項はいっそう意味を持つようになる。より高いDPM出力を持つ線源38に依存する本発明の実施形態は、あまり高感度でない放射線検出器22の使用を可能にする。
【0065】
様々な種類のセンサモジュール20について以下でさらに詳細に記述する。
【0066】
システム40は、医療装置によって実行される処置に悪影響を及ぼさない率で位置標定および/または追跡を行うために、充分な量の放射線を提供することのできる放射線源38をさらに含む。ほとんどの医療処置で、毎秒10回の位置標定は、システム40のオペレータが医療装置を所望の位置まで快適にナビゲートすることを可能にするのに充分である。以下でさらに詳述するコンピュータによるシミュレーションからの結果に基づいて、体内で線源38による数時間の処置を受ける患者に有意のリスクをもたらさないように、これらの基準を満たす放射線の量を充分に低くすることができる。代替的にまたは追加的に、該量は、システム40のオペレータが下述するように長時間の放射線曝露から有意のリスクに曝されないように、充分に低くすることができる。
【0067】
例えば、イリジウム192を使用して放射線源38の放射能を0.01mCiから0.5mCiに増大した場合、精度は2倍に改善されるだけである(図9B)。しかし、0.1mCi未満の放射能レベルは、応答時間に悪影響を及ぼす(図9A)。0.1mCiより大きい放射能は、応答時間を有意に改善しない。0.05mCiの放射能は、以下でさらに詳述するようにレイテンシと精度との間の受け入れられるトレードオフを提供し、性能と放射線量との間の優れた妥協をもたらす。
【0068】
0.05mCiの線源38は、発生する放射線量がグローブ無しに安全に取り扱うことができるほど低い状態で、システム40が適切な速度および精度を達成することを可能にする。0.05mCiの線源38からの患者の放射線被曝は、米国における平均吸収背景放射より8倍高いだけである。従前より利用可能な代替物と比較する目的で、0.05mCiの線源38は、患者に0.0022mSv/時の実効線量当量(EDE)を被曝させる。典型的な蛍光X線透視法誘導処置は1回の処置当たり1〜35mSVのEDEを有し、典型的な核医学処置は5mSvのEDEを有する。したがって、本発明の一部の実施形態は、患者の放射線被曝を著しく低減するために使用することができる。
【0069】
医療担当者は任意選択的にさらにいっそう低い放射線を被曝し、被爆レベルは介在距離の2乗に比例して低下する。例えば、0.05mCiの線源38から1メートルの位置で、1日6時間、週5日、年52週、処置を実行する医師は、0.22mSvの年間総EDEを蓄積する。これは、被曝監視が一般的に実行される放射線被曝レベルの約5%である。この被曝レベルは1.4e−4mSv/時に対応し、それは蛍光X線透視術による一般的線量に関連する1〜12mSv/時より数桁低い。
【0070】
イリジウム192は、医療用途における使用がすでに容認されており、かつ一般的に被験者の体内に導入しても安全であるとみなされているため、実施例として使用した。しかし、この同位元素は適切な線源38の単なる例証としての実施例であって、システム40の制限と解釈すべきではない。システム40の文脈で使用するための同位元素を選択する場合、放射能(DPM)、放射線の種類、および/または半減期を考慮することができる。放射能については上述した。加えて、例えば20〜50cmの関連距離で適正な効率で壊変事象を検出できることが一般的に望ましい。長い半減期は、在庫管理を容易にし、かつ無駄を減らすことによって長期的な総コストを低減するため、好ましいかもしれない。しかし、短い半減期は放射性物質に対する懸念を軽減することができ、かつ/またはより小さい線源を使用することを可能にする。
【0071】
本発明の一部の実施形態では、線源38は陽電子放出源である。これらの実施形態では、センサ20は、陽電子/電子衝突の結果放出される光子がやって来る方向を決定する。陽電子が電子と出会う前に線源38から移動する距離は一般的に非常に小さいため、この相違は任意選択的に、決定される位置の精度になんら有意の影響を及ぼさない。線源38に陽電子を使用すると、検出に利用可能な全電離放射線放出を効果的に増幅することができる。任意選択的に、多重検出器を使用すると、陽電子対消滅事象の検出が可能になる。他の線源の種類の例として、ガンマ線源、アルファ線源、電子線源、および中性子線源が挙げられる。
【0072】
同位元素に関係なく、線源38は、追跡される医療装置(例えばガイドワイヤまたはカテーテル)内に組み込むことができる。組込みは例えばガイドワイヤ先端付近、および/またはカテーテル内またはインプラント内の異なる位置に行うことができる。電離放射線源は、ガイドワイヤの一部分、または医療装置の一部分と一体的に形成するか、あるいはそれに取り付けることができる。取付けは、例えば装置の専用受容器内に線源を接着、溶接、または挿着することによって達成することができる。取付けはまた、医療装置に貼付される粘着タグ(例えばクラックアンドピールステッカ(crack and peel sticker))、塗布可能な塗料または接着剤のような線源を供給することによっても達成することができる。任意選択的に、電離放射線源は固体として、例えば放射性同位元素を含む1本のワイヤとして供給される。所望の同位元素を含有する短いワイヤは、ガイドワイヤまたは医療装置に固着することができる。この結果、医療装置および放射線源が共局在する。固着は例えば、ガイドワイヤの製造中に、固体線源のガイドワイヤとの同時押出しによって達成することができる。代替的にまたは追加的に、電離放射線源は、医療装置および/またはガイドワイヤに塗布することのできる放射性塗料として供給することができる。電離放射線源がガイドワイヤまたは医療装置に供給または固着される厳密な形態に関係なく、医療処置の最後に体内から取り出された後に、被験者の体内に有意の放射性残渣が残ってはならない。
【0073】
分かり易くするために、線源38は単一の品目として図示されているが、2つまたはそれ以上の線源38をシステム40によって同時に追跡することができる。システム40は、離散位置または経路、放射線の周波数、放射線のエネルギ、または放射線の種類を含め、それらに限らず、多種多様の手段によって複数の線源38を識別することができる。本発明の一部の実施形態では、2つまたはそれ以上の分解可能な線源38を使用して、追跡される品目に関する方位情報がもたらされる。換言すると、これらの実施形態は、座標X、Y、およびZによって画定される3次元位置だけでなく、画定された位置における追跡対象物体の方位に関する情報をも決定することができる。この特徴は、非対称な器具を使用する場合の医療文脈に関連する。
【0074】
システム40は、1つまたはそれ以上のセンサモジュール20とコンピュータ処理装置(CPU)42との間でデータ信号を伝達することのできる通信チャネル48を含むことができる。通信チャネルは有線または無線またはそれらの組合せとすることができる。有線通信チャネルは直接ケーブル接続、公衆交換電話網(PSTN)を介する電話接続、光ファイバ接続、および外部に明白なワイヤを持たない統合物理ユニットとしてのシステム40の構造を含むが、それらに限定されない。無線通信チャネルは赤外線伝送、高周波伝送、セルラ電話伝送、および衛星媒介通信を含むが、それらに限定されない。信号伝送が所望のリフレッシュ速度を達成可能である限り、通信チャネル48の厳密な性質はシステム40の動作の中心ではない。通信チャネル48は任意選択的に、システム40を遠隔医療の文脈で動作させることを可能にする。代替的にまたは追加的に、通信チャネル48は、医療担当者の放射線被曝を所望の程度まで低減する手段として、線源38と医療担当者との間の距離を増大させるのに役立つかもしれない。
【0075】
CPU42は、通信チャネル48を介して出力信号34を受け取り、かつ出力信号34を放射線源38に関する方向情報に変換するように設計および構成される。この方向情報は、例えば放射線源38が存在する平面として表わすことができる。出力信号34は少なくとも回転角32を含む。任意選択的に、出力信号34は、線源38からの信号の受取りを示す成分を示す信号強度を含むことができる。線源38からの信号の受取りは、2進信号(はい/いいえ)または信号の大きさ(例えば毎分カウント数)のいずれかとして示すことができる。本発明の様々な実施形態では、出力信号34はデジタルまたはアナログのいずれかとすることができる。アナログ信号からデジタル信号への変換は、センサモジュール20またはCPU42のいずれかによって実行することができる。場合によっては、単一の平面内における放射線源38の位置標定で充分である。しかし、本発明の多くの実施形態では、CPU42が出力信号34の2つを受け取り、交差を算出することが望ましい。出力信号34が平面として表現される場合、これは2つの平面の線形交差44を生成する。これは、線形交差44上の放射線源38を位置標定する。任意選択的に、この計算の結果44は、さらに詳しく上述するように、表示装置43に表示される。本発明の追加の実施形態では、CPU42は出力信号34の少なくとも3つを受け取り、それらの交差を算出する。出力信号34が平面として表わされ、センサ20が円58の外周上に配置される場合、これは少なくとも3つの平面の交点44を生成し、それらによって算出された交点44に放射線源38が位置標定される。
【0076】
システム40は医療処置中に医療機器を追跡するために最も頻繁に使用されるため、CPU42はしばしば、放射線源38の位置を時間の関数としてプロットすることができるように、交点を所定の間隔で繰返し算出するために使用される(図10A参照)。各プロット位置およびプロット全体の精度は、線源38の放射能、センサ20の応答時間の精度、および植え込まれる医療装置が被験者54の体内を移動する速度によって影響されることがある。医療処置は一般的に速度より精度を重視するため、システム40のオペレータは、処置に使用される医療装置の移動の速度を低減することによって、線源38の不足、またはセンサ20の精度もしくは応答時間を補うことができる。図10Bは、±2mmの範囲の追跡精度でシミュレートしたシステム40の出力を示す。CPU42はまた任意選択的に通信チャネル48を使用して、後で詳述するように様々な信号をセンサモジュール20に送信することもできる。代替的にまたは追加的に、CPU42は任意選択的に通信チャネル48を使用して、医療装置に様々な信号を送信することもできる。本発明の様々な実施形態では、システム40は、血管形成術(例えばバルーン血管形成術)、展開処置(例えばステント配置または密封小線源治療用の放射性シードの植込み)、生検処置、切除処置、および焼灼処置をはじめとする処置の文脈で使用することができるが、それらに限定されない。
【0077】
CPU42は単一の物理的ユニットとして図示されているが、本発明の一部の実施形態では、実際には多数の物理的に離散したCPUを使用することができる。例えばCPU42に属するとみなされる一部の機能または機能の一部分は、センサモジュール20に設置されたプロセッサによって実行することができる。この明細書および付属の特許請求の範囲を目的として、本書で記述するように線源38を位置標定するように連携して働く複数のプロセッサは、まとめてCPU42とみなされる。
【0078】
本発明の一部の実施形態では、システム40は、3つまたはそれ以上の出力信号34を同時に受け取って信号源38を示す3つまたはそれ以上の方向を算出するために、3つまたはそれ以上のセンサモジュール20を同時に使用する。方向が平面として表わされる場合、3つまたはそれ以上の平面は単一の点で交差する。しかし、システム40は、2つまたは1つのセンサモジュール20を使用して線源38を単一点に位置標定する代替実施形態を含む。これは、後述するように幾つかの異なる方法で達成することができる。
【0079】
システム40の一部の実施形態では、センサモジュール20の少なくとも1つが一連の位置を通過するように少なくとも1つの放射線検出器22を回転させることができる。検出器22における線源38からの放射線の受取りが回転角32により変化するように、各位置は回転角32によって画定される。この回転は多種多様な方法で達成することができる。例えば回転機構26は、受け取る放射線の量を変数とする規則に従って、放射線検出器22からのフィードバックによって動作することができる。代替的に、回転機構26は、受け取る放射線の量および/または時間を変数として含む規則に従って、CPU42からの信号によって動作することができる。代替的に、回転機構26は、特定の回転角32で放射線がどれだけ放射線検出器22に衝突するかに関係なく、固定したスケジュールに従って放射線検出器22を回転させることができる。回転機構26は、回転角32を達成するために多種多様な異なる機構を使用することができる。これらの機構は機械的機構、油圧機構、電気的機構、電子的機構、および圧電機構を含むが、それらに限定されない。任意選択的に、独立角度測定要素30を使用して、実際の回転角32をより正確に確認することができる。角度測定要素30は図1、2、および3に物理的に離散した部品として図示されるが、システム40の性能に有意の影響を及ぼすことなく、回転機構26に物理的に一体化することもできる。厳密な動作の詳細に関係なく、目的は、センサモジュール20が線源38の方向を直接指し示す回転角を検出することである。この角度を目標回転角32と呼ぶ。
【0080】
システム40の一部の実施形態では、放射線検出器22(図3、5、6A、および6B)は、少なくとも1つの第1放射線検出器22Aおよび少なくとも1つの第2放射線検出器22Bを含む。システム40のこれらの実施形態は、各回転角32に対する放射線検出器22Aおよび22Bからの出力信号34の比較に依存する。既知の関係を持つ放射線検出器22Aおよび22Bから出力信号34を生成する目標回転角32は、放射線検出器22Aおよび22Bが両方とも同じ程度に線源38を向くことを示す。放射線検出器22Aおよび22Bが同一受領領域を持つ場合、既知の関係は同等である。この目標回転角32を使用して、線源38が存在する平面を決定する。
【0081】
放射線検出器22Aおよび22Bからの出力信号34間の小さい差にシステム40の感度を高めるために、放射線検出器22Aおよび22Bに対して一定角度に1つまたはそれ以上の放射線シールド36を導入することが可能である。放射線シールド36は、第1放射線検出器22Aからの出力信号34の成分の大きさおよび第2放射線検出器22Bからの出力信号34の成分の大きさを各々、回転角32により変化させる(図3参照)。放射線シールド36は、入射角39および41の間の関係に応じて、放射線検出器22Aまたは22Bのいずれかを差別的に遮蔽する。ある回転角32では、放射線検出器22Aおよび22Bのどちらも放射線シールド36によって遮蔽されない。この回転角32を使用して、線源38が存在する平面を決定する。この構成は、シャドー効果のため、この目標回転角32からの小さい変分が放射線検出器22Aおよび22Bからの出力信号34に比較的大きい差を生じることを確実にする。したがって、センサモジュール20における放射線シールド36の使用は、システム40の感度を増大させる。この増大した感度は、検出可能な放射線計数が低くても、センサモジュール20が効果的に機能することを可能にする。
【0082】
図6Aは、放射線シールドが第1放射線検出器22Aおよび第2放射線検出器22Bの間に配置された一次放射線シールド36を含む、センサモジュール20の追加の実施形態を示す。この図の実施形態はまた、第1放射線検出器22Aを一連の第1放射線検出器に分割して第1放射線検出器22Aの方向に向けられた入射放射線を妨げる、一連の第1の追加放射線シールド(36A1、36A2、および36A3)をも含む。図示された実施形態はまた、第2放射線検出器22Bを一連の第2放射線検出器に分割して第2放射線検出器22Bの方向に向けられた入射放射線を妨げる、一連の第2の追加放射線シールド(36B1、36B2、および36B3)をも含む。この構成は、目標回転角32からのずっと小さい変分でも、追加放射線シールド(図示した実施形態では36A1、36A2、36A3、36B1、36B2、および36B3)の個数に比例してシャドー効果を高めることによって、放射線検出器22Aおよび22Bからの出力信号34の比較的大きい差を生じることを確実にすることができる。したがって、センサモジュール20における追加放射線シールド(例えば36A1、36A2、36A3、36B1、36B2、および36B3)の使用は、システム40の感度の追加的増大を達成するのに役立つことができる。任意選択的に、二次放射線シールド(図示した実施形態では36A1、36A2、36A3、36B1、36B2、および36B3)は一次放射線シールド36の方向に傾斜する。二次放射線シールド36A1、36A2、36A、36B1、36B2、および36B3の一次シールド36の方向への角度は、焦点を改善するため、かつ/または撮像ボリュームを画定するために、例えばモータを用いて変化させることができる。
【0083】
同様の効果は、放射線検出器22Aおよび22Bを一定角度に保持し、放射線シールド36(図6B)を角変位にさらすことによって達成することができる。したがって、システム40はまた、放射線検出器22が少なくとも1つの第1放射線検出器22Aおよび少なくとも1つの第2放射線検出器22Bを含み、かつ検出器22Aおよび22Bからの出力信号34の離散成分の大きさが各々シールド回転角32の関数として変化するように、少なくとも1つの放射線シールド36がシールド回転軸を中心にシールド回転角32だけ回転可能な状態で、出力信号34が検出器22Aおよび22Bからの離散成分を含む、実施形態をも含む。
【0084】
今、図5を参照すると、システム40のセンサモジュール20の代替的実施形態は、放射線検出器22が複数の放射線検出器22、および複数の放射線検出器22の間に分散された複数の突出放射線シールド36を含むように構成されている。これらの実施形態では、複数の放射線検出器22は対として編成され、各対は第1部材21および第2部材23を有し、複数の突出放射線シールドの各突出放射線シールド36は、対の放射線検出器22の第1部材21と第2部材23との間に配置される。この実施形態では、センサモジュール20は、放射線検出器22における放射線源38からの放射線の受取りが回転角32により変化するように、一連の回転角32だけ放射線検出器22を回転させることができる。各放射線検出器は出力信号34を生成する。CPU42は全ての第1部材21からの出力信号34を合計して第1和を生成し、かつ全ての第2部材23からの出力信号34を合計して第2和を生成する。全ての放射線検出器22が同一であることを前提として、センサが線源38の質量の中心に直接向けられたときに(目標回転角32)、第1和および第2和は等しい。この実施形態は、回転角32がいずれかの方向に非常にわずかに変化するだけでも、モジュール20全体の総出力が急激に増加することを確実にする。代替的にまたは追加的に、モジュール20全体の総出力の符号は、モジュール20全体のその総出力で所望の回転角32に達するために必要な回転の方向を示す。したがって、この構成は、システム40の動作速度および全体的精度の両方を高めるように働く。この型のセンサモジュール20は、(例えば)ある期間の線源38からのガンマ線の衝撃を合計する第1アルゴリズムを実現し、かつモジュール20全体の総出力の符号に基づいて、所望の回転角32を達成するためにどの方向にどの程度放射線検出器22を回転させるかをCPU42に決定させることによって、動作することができる。代替的に、CPU42は(例えば)第2アルゴリズムを実装し、各検出計数に応答して非常に少量だけ放射線検出器22を回転させる。本書に提示する性能データは第2アルゴリズムのシミュレーションに基づいているが、第1アルゴリズムも同様に有用であると信じられる。
【0085】
システム40の追加の実施形態では、単一センサモジュール20を使用して、線源38が存在する2つの交差する平面を決定することができる。これは、例えばセンサモジュール20の回転によって、またはセンサモジュール20を新しい位置に移動させることによって達成することができる。
【0086】
本発明の一部の実施形態では、センサモジュール20は追加的に、回転軸25を中心に回転角29だけ放射線検出器22を回転させることができる。回転は、回転機構26について上述したように多種多様な方法で機能することのできる、回転機構27によって生成される。本発明のこれらの実施形態では、回転角29はセンサモジュール20の方位の成分として含まれ、出力信号34に含まれる。回転は、上述しかつ下述するセンサモジュール20の構成のいずれかまたは全ての文脈で使用することができる。回転は、例えばCPU42から通信チャネル48を介してセンサモジュール20に伝送される回転信号46に応答して発生することができる。
【0087】
本発明の追加の実施形態では、センサモジュール20は、モジュール20の位置が変更されるように、モジュール20に並進運動33をもたらすことのできる推進装置31を含む。推進は、CPU42から通信チャネル48を介してセンサモジュール20に伝送される、例えば並進運動信号46に応答して開始することができる。本発明の様々な実施形態では、推進は、単一のセンサモジュール20が複数の位置から動作することを可能にするか、あるいはセンサモジュール20に角感度を提供するために使用することができる。換言すると、並進運動は、特に少なくとも1つの放射線シールド36を使用する実施形態で、角変位の代替物として使用することができる。並進運動を使用する実施形態では、第1次元における単一センサ20の並進は、第1組の方向情報の取得を可能にする。例えば図4に示すシステム40の実施形態では、センサ20Aの逐次垂直変位を使用して、線源38が存在する第1平面を決定することができる。センサ20Bの逐次水平変位は、線源38が存在する第2平面を決定するために使用することができる。代替的にまたは追加的に、単一センサ20は垂直および水平変位の両方を受ける。逐次垂直および水平変位は、単一センサ20が線源38の存在する2つの非平行平面を決定することを可能にする。単一の線に沿った同時垂直および水平変位は、センサ20が線源38の存在する単一の平面を決定することを可能にする。2つまたは3つまたはそれ以上の平面の交差の決定は、上述の通りである。任意選択的に、本発明の同一実施形態に推進および回転を使用することができる。
【0088】
任意選択的に、システム40は、画像信号52をCPU42に提供することのできる画像取得装置56を含む、撮像モジュール50をさらに含む。撮像モジュール50は任意選択的に、CPU42との通信を促進するためにインターフェースを含む。CPU42は、画像信号52を被験者54の身体の一部分の画像に変換することができる。本発明の様々な実施形態では、撮像モジュール50は蛍光X線透視法、MRI、CT、または2Dもしくは多平面もしくは3D血管造影法に依存することができる。頭蓋内処置の場合、撮像は一般的に処置と同時に実行する必要はない。これは、脳が頭蓋内であまり移動しないからである。処置の1日またはそれ以上前、または処置の数時間前、または処置の直前に取得された画像を使用することができる。本発明の代替的実施形態では、画像データは別個に(つまりシステム40の外部で)取得して、アラインメントのためにCPU42に提供される。
【0089】
解剖学的画像表示および追跡情報のオーバレイのためのアラインメント方法およびアルゴリズムは、Jolesz(1997)Radiology 204(3):601‐12に考察されている。Joleszの論文は、そこに引用されている参考文献と共に、当業熟練者が画像データおよび追跡データの同時表示およびアラインメントを達成する実施可能性を提示している。Jolesz文献はそこに引用された参考文献と共に、個々の各参考文献が個々に引用されかつ参照によって援用されているかのように、参照によって完全に本書に援用する。
【0090】
本発明の例示的実施形態では、システム40によって決定された位置は、画像に対して登録される。これは、例えばシステム40および/またはセンサ20を画像取得装置56に登録することによって達成することができる。
【0091】
どの種類のセンサモジュール20を使用するかに関係なく、システム40は、CPU42と通信する表示装置43を含むことができる。表示装置43は被験者の身体の部分の画像を表示し、医療装置の決定位置(線源38の位置に対応する)を被験者の身体の部分の画像に重ね合わせることができる。重ね合わされた決定位置は任意選択的に、表示画面43上に点として表現される。任意選択的に、点は、CPU42によって決定された所望の信頼区間の標識によって取り囲まれる。信頼区間は、例えば円として、2つまたはそれ以上の交線として、あるいは1つまたはそれ以上の角括弧の対として表示することができる。代替的にまたは追加的に、表示装置43は、医療装置の決定位置(例えばガイドワイヤの先端における線源38の位置に対応する)の位置座標を表示することができる。
【0092】
表示装置43に、処置中または処置前のいずれかに撮像されたCT、MRI、または3D血管造影からの3次元血管造影データセットを提供することができる。適切なソフトウェアを使用して、血管造影データセットから脈管構造の3Dモデルを抽出し、3Dモデル視覚化の標準モードを使用してこのモデルを表示することができる。ガイドワイヤまたはカテーテルの3次元グラフ表現を脈管構造の3Dモデルに組み込み、システム40によって提供される位置情報に基づいて最小限の時間遅延で更新して、脈管構造内のガイドワイヤまたはカテーテルの位置を示すことができる。脈管構造およびカテーテルを含む3Dモデル全体を、最良可能な視覚化を達成するために処置の実行中に、ユーザがズームさせ、回転させ、かつその他対話により操作することができる。
【0093】
任意選択的に、システム40はさらに、1つまたはそれ以上のユーザ入力装置45(例えばキーボード、マウス、タッチスクリーン、トラックパッド、トラックボール、マイクロフォン、ジョイスティック、またはスタイラス)を含むことができる。入力装置45は、表示装置43上の画像を上述したように調整し、かつ/または回転機構26、回転機構27、推進装置31、または画像取得装置56のようなシステム40の様々な構成部品にコマンド信号を発行するために使用することができる。
【0094】
本発明は任意選択的に、図3に示しかつ上述したように、放射線源が存在する平面を決定するためのセンサ20を含む。簡単に言うと、センサ20は少なくとも1つの放射線検出器22を含み、少なくとも1つの放射線検出器は放射線源38からの放射線を受け取り、出力信号34を生成することができる。放射線検出器22における放射線源38からの放射線の受取りが回転角32により変化するように、センサ20は、各位置が回転角32によって画定される一連の位置を通過するように放射線検出器22を回転させることができる。回転は任意選択的に上述したように達成される。最大出力信号を生成する回転角32は、放射線源38が存在する平面を示す。
【0095】
センサ20の一部の実施形態では、放射線検出器22は少なくとも1つの第1放射線検出器22Aおよび少なくとも1つの第2放射線検出器22Bを含み、出力信号34は、第1放射線検出器22Aからの第1出力信号および放射線検出器22Bからの第2出力信号を含む。
【0096】
センサ20の一部の実施形態では、少なくとも1つの放射線シールド36はさらに、検出器22Aおよび22Bに対して一定の角度に設置される。その結果、少なくとも1つの第1放射線検出器からの第1出力信号34の大きさおよび放射線検出器22Bからの第2出力信号34の大きさは各々、上述したように回転角32により変化する。
【0097】
上に詳述したようにシールド回転軸を中心にシールド回転角32だけ回転可能な少なくとも1つの放射線シールド36を特徴とする、放射線源が存在する平面を決定するためのセンサ20(図6B)は、本発明の追加の実施形態である。
【0098】
図5に示し且つ上述したように、放射線源が存在する平面を決定するためのセンサ20は、本発明の追加の実施形態である。
【0099】
本発明の代替的実施形態では、被験者の体内の医療装置の位置を決定する方法400(図11)を提供する。方法400は、放射性信号源38と医療装置を共局在化させるステップ401を含む。共局在化は、例えば装置に関連付けられる放射線源を有する装置を提供することにより、または放射線源を装置と関連付けることにより達成することができる。
【0100】
方法400はさらに、全方向信号発生器が存在する第1平面を決定するステップ402と、全方向信号発生器が存在する第2平面をさらに決定するステップ403と、医療装置がその上に存在する線を決定する手段として、第1平面および第2平面の線形交差を算出するステップ404とを含む。
【0101】
方法400は任意選択的に、線源38が存在する少なくとも1つの追加平面をさらに決定するステップ405を含む。
【0102】
方法400は任意選択的に、医療装置の位置を決定する手段として、第1平面、第2平面、および少なくとも1つの追加の平面の交点を算出するステップ406を含む。
【0103】
任意選択的に、方法400は、移動する植込み医療装置を追跡するために一連の位置が生成されるように、逐次反復される408。算出された位置は、希望するならば解剖学的撮像データと共に表示することができる410。
【0104】
上に詳述したシステム40および/またはセンサ20の様々な態様および特徴は、方法400の実行を可能にするため、または改善するために使用することができる。
【0105】
システム40および方法400は様々な数学的アルゴリズムを使用して、線源38の位置を算出することができる。本発明の一部の実施形態の文脈で使用するのに適したアルゴリズムの1例は、次のように3つのセンサのセンサ出力信号34、センサ位置、およびセンサ方位(つまり回転角32)から線源38の位置を算出する。
1)各センサモジュール20によって画定される平面は、次の形の方程式を使用して算出される。
2)係数A、B、C、およびDは次の通り計算される。
a.3つの非共線点がセンサ20の内部基準フレーム内に画定される。
b.これらの3つの点は次いでセンサ20の位置によって変移され、センサの方位によって回転される。これにより、出力信号34が零であった場合、線源38が存在する平面が画定される。
c.これらの3つの点は次いで、センサ20の回転角32の軸を中心に、出力信号34によって示される回転角32だけ回転される。これにより、特定のセンサ20によって測定される通り線源38が存在する平面が画定される。
d.次の方程式で3つの点のx,y,z座標x1,y1,z1,x2,y2,z2,x3,y3,z3を使用して、A、B、C、およびDは次のように計算される。
3)3つのセンサ20の各々についてA、B、C、およびDを計算することにより、3つの3元方程式系が生成される。
この方程式系を解いて、(x,y,z)(またはベクトルの部分)、線源38の位置である3つの平面の交点の正確な解を得ることができる。
【0106】
追加センサ20の使用により、個々のセンサの誤差を平均することによって精度が改善され、また、センサが相互に合致する程度を示すことによって位置測定の精度を推定する手段ももたらされる。
【0107】
4個以上のセンサを使用する場合、アルゴリズムは次の通りである。
上記ステップ1および2は変わらない。各センサによって示される平面の方程式が計算される。ステップ3は次のように変更される。
3)各々のセンサに対してA、B、C、およびDが計算されると、次のような4つ以上の3元方程式の優決定系が得られる。
この優決定系は、追跡される要素の最尤位置である(x,y,z)の最適解を得るために当業者が精通している方法を用いて、最小2乗の意味で解くことができる。センサ出力の誤差のため、一般的に正確な解は無く、全ての平面が通過する単一の点は無いかもしれない。
最小2乗解が、各平面と(x,y,z)の解との間のユークリッド距離によって画定される誤差に基づくために、各平面を画定する全ての係数をそれらのそれぞれの法線ベクトル(法線ベクトルは(A,B,C)によって定義される)の長さによってスケーリングする必要がある。これは、少なくとも最小2乗解を計算する前に、A、B、C、およびDを平方根(A^2+B^2+C^2)で除算することによって行われる。
4)各々の平面と算出された位置との間のユークリッド距離は、位置測定の精度の尺度として使用することができる。ひとたび係数が法線ベクトルの長さによってスケーリングされると、各センサについてこの距離をAx+By+Cz−Dとして算出することができる。各平面から算出された位置までの距離の平均値は、全てのセンサが算出された位置で合致する程度の尺度をもたらす。
【0108】
方程式の優決定系は、最小2乗解アルゴリズムを用いて解くことができる。適切な最小2乗アルゴリズムは、市販の数学ソフトウェアパッケージの構成要素として入手可能である。
【0109】
任意選択的に、当業界で公知の方程式の組を解く他の方法を使用する。任意選択的に、1組の方程式の代わりに、他の計算方法、例えばニューラルネットワーク、ルールベース方法、およびセンサからの信号を使用して結果的に得られる位置を探索または推定するテーブルルックアップ方法を使用する。センサが線形的に移動するシステムでは、他の解決方法、例えばセンサの線形位置を線源の空間座標に変換する方法を使用することができる。
【0110】
システム40および方法400の精度および性能を高めるために、任意選択的に事前較正を実行することができる。システムの機械的製造に基づく値に依存するのではなく、各々のセンサモジュール20の位置および方位を較正することができる。較正手順は、システム40を使用して、高精度に画定された多数の既知の位置で線源38の3次元位置を測定することを含む。線源38の位置は既知であるため、これらの値を解くためにセンサの位置および方位を未知数として位置を計算するために、通常使用される方程式(上述)を使用することができる。様々な最小化手順が当業界で公知である。そのような較正を実行するために必要な測定の回数は、未知数より多数の方程式を提供するのに充分な測定を行うのに有用であるため、システム40におけるセンサモジュール20の個数に依存するかもしれない。この較正手順はまた、システム40が線源の位置を測定するときの基準の原点およびフレームをも画定し、したがって追跡システムと、蛍光X線透視システムまたは他の撮像システムのようなそれが永久に取り付けられる別のシステムとの間のアラインメントを達成することができる。
【0111】
本発明の例示的実施形態では、ひとたび線源の位置が分かると、センサは線源に向けたままに維持し、それらの方位を変えないでおくことができる。任意選択的に、例えば検出される放射線の有意の変化(例えば30%、50%、70%、90%、もしくはそれ以上の降下、または中間的降下)によって決定されるように、線源が移動する場合、線源が存在すると予想される角度範囲を走査するようにセンサを動かす。任意選択的に、センサは、例えば下述するように、線源がセンサのどちら側に位置するかを示す信号を生成する。任意選択的に、走査の範囲は、例えば履歴に基づく手順、および/またはユーザ閾値に基づく手順に基づいて、線源の予想される角速度によって異なる。範囲内の走査が失敗した場合、任意選択的に範囲を増大する。
【0112】
任意選択的に、複数の目標線源(例えば異なる計数レートおよび/または異なる放出エネルギを持つもの)が設けられた場合、センサは目標角度間をジャンプする。任意選択的に、2つ(またはそれ以上)の線源を包含する角度間の定常掃引を行う。任意選択的に、掃引は、例えば1秒の1倍、5倍、10倍、20倍、50倍またはそれ以上の倍数の角度範囲を含む、超音波またはセンサまたはその一部分の音波振動によって行われる。任意選択的に、振動の振幅が角度範囲を決定する。任意選択的に、センサまたはセンサ部分が1つまたはそれ以上の振動周波数と共振する。
【0113】
任意選択的に、10度未満または5度未満または1度未満のような少なくとも小さい角度範囲のセンサの走査は、センサが目標線源上に固定されている場合でも行われる。
【0114】
上述したようにイリジウム192を線源38として使用するシステム40の追跡精度を、コンピュータシミュレーションのみによって評価した。シミュレーションは、モデルの頭部内の線源38によって放出され、かつ図5に示した型の複合差分センサユニット20内の光子感受性要素22によって吸収される、ガンマ光子のランダム分布のモデルである。シミュレーションによると、光子が検出器22によって吸収されるたびに新しい回転角32が画定されるように、センサモジュール20の放射線検出器22は回転する。光子が正の放射線検出器21によって吸収される場合には、センサモジュール20の放射線検出器22は正の方向に回転し、それが負のセンサ23によって吸収される場合には、センサモジュール20の放射線検出器22は負の方向に回転する。センサモジュール20の総出力信号34は、サンプル時間中のその平均方位である。
【0115】
シミュレーションでは、性能は2つのパラメータによって定義されるが、実際のシステムでは他のパラメータを使用することができる。
1)目標が静止している場合、2乗平均平方根(RMS)誤差
2)線源38の実際の位置が10mm変化した後、計算位置の9mmの変化を示すまでの時間
【0116】
以下のパラメータ値はシミュレーションでは一定であった。
1)線源からセンサまでの距離=25cm(最悪の場合の距離)
2)センサが幾何学的に最適化される場合の線源の距離=25cm
3)各サブセンサの光子感受性表面の幅=2mm(図5の18)
4)センサの長さ=10cm(図5の14)
5)センサ間の分割壁の高さ=5cm(図5の35)
6)分割壁の基部の幅=4mm(図5の37)
7)複合センサの壁によって画定されるサブセンサの個数=7(図5の36)
8)センサ感度(入射するガンマ線のうち検出される分)=0.3
【0117】
シミュレーションは、以下のパラメータを性能に対する影響に関して評価し、最適化した。
1)吸収される光子1個当たりの回転の大きさ(図7Aおよび7B)
2)サンプル時間(図8Aおよび8B)
3)1秒当たりの光子数(線源の放射能レベル)(図9Aおよび9B)
4)総合追跡精度(図10Aおよび10B)
【0118】
シミュレーションから、光子の1回の衝突当たりの回転が大きくなると、応答時間が改善されることが決定された(図7A)。しかし、光子の1回の衝突当たりの回転が増大すると、RMS位置誤差も増大する(図7B)。明らかに、レイテンシと精度との間にトレードオフがある。このパラメータは、下述する移動検出アルゴリズムを用いてトレードオフを最適化するために、実時間で変更することができる。
【0119】
シミュレーションは、サンプル時間がレイテンシにも精度にも有意の影響を及ぼさないことを決定した(図8Aおよび8B)。これは、1回の衝突当たりの回転が小さい値である場合、サンプル当たりの衝突の回数も精度に最小限の影響を持ち、レイテンシ(1サンプル当たりの回転の総量)を決定するだけであることによる。しかし、サンプル時間の低減の結果、サンプル当たりの衝撃の回数が減少すると、サンプル時間の低減はレイテンシを変化させずに、サンプル当たりの低減される応答を正確に補償する。
【0120】
放射能(毎秒放出される光子の数)は精度に非常にわずかな効果を持ち、放射能が0.01mCiから0.5mCiに増大したときに、精度は2倍に改善するだけである(図9B)。急激な回転を誘発するだけの充分な光子が単に無いだけの低い放射能レベルでは、それは応答時間に劇的な効果を有する(図9A)が、0.1mCiより高い放射能レベルでは、放射能レベルの増加により最小限の改善がある。レイテンシと精度との間のこのトレードオフの最適化は(以下参照)は、0.05mCiで達成される。この特定の放射能は性能と放射線量との間の適正な妥協をもたらし、患者または医師に安全上のリスクを課すことなく、一般的な医療用途に適した性能を達成する。
【0121】
精度とレイテンシとの間のトレードオフを最適化するために、移動検出アルゴリズムを使用して、追跡される線源38の移動中は光子当たりの回転を増大させた。これはレイテンシ時間を低減させ、かつ精度を増大させた。シミュレーションでは、正21と分類される受容要素22に衝突する光子の負23と分類されるものに対する百分率を、追跡される線源38の移動の標識として使用した。百分率が50%から遠くに離れるにつれて、光子当たりの回転は増大し、移動中は精度を犠牲にしてレイテンシを低減した。換言すると、システム40は最初、推定される目標回転角32に向かって大きい間隔で移動する。推定される目標回転角32に近づくにつれて、間隔の大きさは低減される。目標回転角32を通過すると、反対方向の小さい補償間隔が使用される。結果を図10Aおよび10Bにグラフで要約する。簡単に言うと、移動する線源38を追跡するシステム40のRMS誤差は平均0.71mmである。静止線源38のシステム40による位置標定は0.62mmのrms誤差を生じる。
【0122】
要約すると、シミュレーション結果は、192イリジウムの0.05mCiの放射能、図5に示した型の複合差分センサ、およびレイテンシと精度との間のトレードオフを行う移動検出アルゴリズムにより、システム40が約1mmRMSの総合精度を達成することができることを示している。
【0123】
回転角32の変化に対するセンサモジュール20のシミュレーション感度を、図12に示す。それは、図5に示した型のセンサの目標回転角32に対する回転の関数として出力信号34のプロットである。このグラフは次式を用いて生成された。
総出力34=A/(A+B)
ここでAは全ての右側センサ21の和であり、Bは全ての左側のセンサ23およびBの和である。
【0124】
センサ20からの出力34の全範囲(Y軸)は随意に0から1の範囲であると定義した。X軸上で、0は線源38の方向を指す回転角32を示す。センサ20の全回転範囲は、目標回転角32から±32ミリラジアンであった。目標回転角32から32ミリラジアン以上逸脱すると、目標回転角32に到達するための回転の量ではなく、目標回転角32に戻るための回転の方向を示す、0または1のいずれかの出力34を生じる。出力34が0または1である場合、目標回転角32からの逸脱に関して引き出すことのできる唯一の結論は、それが示された方向に32ミリラジアンより大きいことである。
【0125】
図12のグラフは、目標回転角32の出力34を動的範囲の中間として(0.5)として表わす。したがって、出力34が0.6である場合、目標回転角32を達成するためにプラス方向に10ミリラジアンの補正回転を示している。0.6の出力34は、同じ大きさ(10ミリラジアン)であるが、マイナス方向の補正回転を示す。同じ情報を表わす別の方法は、+0.5から−0.5の全動的範囲をY軸上に示すことである。この範囲の中間は零とすることができ、1つの方向は正、もう1つは負であり、あるいは1つの方向がより高く、他の方向がより低い、随意の数字とすることができる。
【0126】
図12に示すように、目標角32で回転に対するセンサ20のシミュレーション感度は、1ミリラジアンの回転当たり動的範囲の約1%である。
【0127】
1ミリラジアン当たりのこの1%の感度は、放射線検出器22の間に分散され0.05mCiの放射能を持つ線源38から25cm離して配置された5cmの高さ35を有するシールド36付きの5cm×10cmのセンサモジュール20を用いて、所望の精度(1mm rms)を達成するのに充分である。精度パラメータを調整し、検出器22のサイズを増大し、センサ20と線源38との間の距離を低減し、線源38の放射能を増大することは各々、センサ20に望ましい方向感度のレベルを低減するように働くことができる。
【0128】
図6Aに示した種類のセンサ20を使用したシミュレーション結果(図示せず)は、本書で上述したものと同様であった。
【0129】
システム40および/またはセンサ20は、様々なコマンドの実行、ならびに様々なデータ入力の解析および変換に依存する。これらのコマンド、解析、または変換は、様々な代替的実施形態に従って、ソフトウェア、ハードウェア、またはファームウェアによって達成することができる。本発明の例示的実施形態では、機械可読媒体は、任意選択的に方法400に従って、1つまたはそれ以上のセンサモジュール20からの出力信号34を線源38の位置座標に変換するための命令を含む。本発明の例示的実施形態では、CPU42は、任意選択的に方法400に従って、1つまたはそれ以上のセンサモジュール20からの出力信号34を線源38の位置座標に変換するための命令を実行する。
【0130】
本発明の例示的実施形態では、追跡可能な医療装置は、検出可能な量の放射性同位元素を医療装置に組み込むかあるいは固着することによって製造される。放射性同位元素は、様々な実施形態に従って医療機能を持っても持たなくてもよい。任意選択的に、同位元素の放射能は医療機能を持たない。任意選択的に、放射性同位元素は、保護コーティング無しで、組織との有害な反応を生じることなく、体内で使用することができるように選択することができる。本発明の例示的実施形態では、同位元素の検出可能な量は、0.5mCiから0.001mCiの範囲内である。この範囲の下部の放射能を持つ同位元素線源38の使用は、装置の低い速度、検出器22の感度、センサ20からの距離に依存するかもしれない。任意選択的に、少なくとも1、任意選択的に少なくとも5、任意選択的に少なくとも10、任意選択的に少なくとも100の検出可能な1秒当たりの計数が、組み込まれた放射性同位元素によって生成される。
【0131】
本願の説明および請求の範囲において、動詞「備える(comprise)」、「含む(include)」、および「有する(have)」の各々は、それらの活用形も含めて、動詞の目的語が必ずしも動詞の主語の構成員、構成要素、要素、または部分の完全なリストではないことを示すために使用される。
【0132】
本発明をその実施形態の詳細な説明を用いて説明したが、それは単なる実施例として提示したものであって、必ずしも本発明の範囲を限定するように意図されていない。説明された実施形態は様々な特徴を備えるが、それらの全てが本発明の全ての実施形態に必要なわけではない。本発明の一部の実施形態は、特徴の一部または特徴の可能な組合せだけを利用する。説明した本発明の実施形態の変形、および記述した実施形態に示した特徴の異なる組合せを含む本発明の実施形態は、1つの実施形態で述べた特徴をいずれかの他の実施形態の文脈で使用することを含め、それに限らず、全ての可能な組合せに結合することができる。本発明の範囲は、付属する特許請求の範囲によってのみ限定される。
【図面の簡単な説明】
【0133】
【図1】本発明の例示的実施形態に係るセンサモジュールの1つの実施形態の側面図である。
【図2】本発明の例示的実施形態に係るコンピュータ化追跡システムの略図である。
【図3】モジュールによる信号の受信を示す、本発明の例示的実施形態に係るセンサモジュールの追加の実施形態の側面図である。
【図4】患者に対するセンサモジュールの1つの可能な配置を示す、本発明の例示的実施形態に係るコンピュータ化追跡システムの斜視図である。
【図5】本発明の例示的実施形態に係るセンサモジュールの追加の実施形態の側面図である。
【図6】本発明の例示的実施形態に係るセンサモジュールのさらなる追加の実施形態の側面図である。
【図7】本発明の例示的実施形態に係るシステムを使用して、光子の1回の衝突当たりのセンサの回転の関数としてそれぞれプロットされたシミュレーション応答時間およびシミュレーションrms位置のグラフである。
【図8】本発明の例示的実施形態に係るシステムを使用して、サンプリング時間の関数としてそれぞれプロットされたシミュレーション応答時間およびシミュレーションrms位置のグラフである。
【図9】本発明の例示的実施形態に係るシステムを使用して、放射性信号源の比放射能の関数としてそれぞれプロットされたシミュレーション応答時間およびシミュレーションrms位置のグラフである。
【図10】図10Aは、時間の関数としての位置のグラフである。図10Bは、図10Aの2つのプロットに基づいて時間の関数としてプロットされたrms位置誤差のグラフである。
【図11】本発明の例示的実施形態に係る方法の簡易流れ図である。
【図12】回転角の関数としてのセンサ出力のグラフである。
【特許請求の範囲】
【請求項1】
電離放射線源を追跡および位置標定するためのコンピュータ化システムであって、
(a)放射線源から電離放射線を受け取って出力信号を生成することのできる少なくとも1つの放射線検出器を備えた、少なくとも1つの非撮像センサモジュールと、
(b)前記出力信号を受け取って前記出力信号を方向情報に変換するように設計および構成されたCPUと、
を備える、システム。
【請求項2】
放射線源は医療装置と一体的に形成されるか、または医療装置に取り付けられる、請求項1に記載のシステム。
【請求項3】
前記少なくとも1つのセンサモジュールは少なくとも2つのセンサモジュールを含む、請求項1に記載のシステム。
【請求項4】
前記少なくとも2つのセンサモジュールは少なくとも3つのセンサモジュールを含む、請求項3に記載のシステム。
【請求項5】
前記少なくとも1つのセンサモジュールのうちの少なくとも1つは、前記センサモジュールを新しい位置に移動させるように前記センサモジュールに並進運動をもたらすことのできる推進装置をさらに備える、請求項1に記載のシステム。
【請求項6】
前記推進装置は前記CPUからの並進運動信号によって動作可能である、請求項5に記載のシステム。
【請求項7】
前記システムは、(c)画像信号を前記CPUに提供することのできる撮像モジュールをさらに備え、前記CPUは前記画像信号を被験者の身体の一部分の画像に変換することができる、請求項1に記載のシステム。
【請求項8】
表示装置をさらに備える、請求項1に記載のシステム。
【請求項9】
表示装置をさらに備える、請求項7に記載のシステム。
【請求項10】
前記表示装置は、被験者の身体の前記一部分の前記画像を、被験者の身体の前記一部分の前記画像の上に医療装置の決定された位置を重ね合わせた状態で表示することができる、請求項9に記載のシステム。
【請求項11】
前記CPUは前記出力信号の少なくとも2つを受け取り、前記出力信号に基づいて前記放射線源の位置を算出する、請求項1に記載のシステム。
【請求項12】
前記CPUは前記出力信号の少なくとも3つを受け取り、前記少なくとも3つの出力信号に基づいて前記放射線源の位置を算出する、請求項1に記載のシステム。
【請求項13】
前記CPUは、前記放射線源の位置が時間の関数としてプロットされるように、間隔をおいて位置を繰返し算出する、請求項12に記載のシステム。
【請求項14】
前記放射線源は6ヶ月から18ヶ月の範囲の半減期を持つ同位元素を使用する、請求項1に記載のシステム。
【請求項15】
前記放射線を提供することができる前記放射線源をさらに備える、請求項1に記載のシステム。
【請求項16】
前記方向情報は、前記放射線源が0.01mCiから0.5mCiの範囲の放射能を有するときに生成される、請求項1に記載のシステム。
【請求項17】
電離放射線源を方向的に位置標定するためのセンサであって、
(a)少なくとも1つの機能構成部品と、
(b)前記少なくとも1つの機能構成部品を移動させることによって、センサに角感度を与える変位機構と、
を備える、センサ。
【請求項18】
前記少なくとも1つの機能構成部品は、放射線源からの放射線を受け取りかつ出力信号を生成することのできる少なくとも1つの放射線検出器を備え、
前記変位機構は、前記出力信号が回転角により変化するように、前記少なくとも1つの放射線検出器を回転角だけ回転させることができる、請求項17に記載のセンサ。
【請求項19】
前記少なくとも1つの放射線検出器は、少なくとも1つの第1放射線検出器および少なくとも1つの第2放射線検出器を備え、前記出力信号は、前記少なくとも1つの第1放射線検出器からの少なくとも1つの第1出力信号、および前記少なくとも1つの第2放射線検出器からの少なくとも1つの第2出力信号を含む、請求項18に記載のセンサ。
【請求項20】
前記少なくとも1つの第1放射線検出器からの前記第1出力信号の大きさおよび前記第2放射線検出器からの前記第2出力信号の大きさが前記回転角により変化するように、前記少なくとも1つの第1放射線検出器および前記少なくとも1つの第2放射線検出器に対して一定の角度に設置された少なくとも1つの放射線シールドをさらに備える、請求項19に記載のセンサ。
【請求項21】
(a)少なくとも1つの第1放射線検出器および少なくとも1つの第2放射線検出器であって、その各々が放射線源から放射線を受け取り、前記少なくとも1つの第1放射線検出器から少なくとも1つの第1出力信号を生成し、かつ前記少なくとも1つの第2放射線検出器から少なくとも1つの第2出力信号を生成することのできる、少なくとも1つの第1放射線検出器および少なくとも1つの第2放射線検出器と、
(b)前記少なくとも1つの第1放射線検出器からの前記第1出力信号の大きさおよび前記第2放射線検出器からの前記第2出力信号の大きさが各々シールドの回転角により変化するように、シールドの回転軸を中心にシールド回転角だけ回転可能である少なくとも1つの放射線シールドと、
を備える、請求項17に記載のセンサ。
【請求項22】
前記少なくとも1つの放射線シールドは、
(i)前記少なくとも1つの第1放射線検出器と前記少なくとも1つの第2放射線検出器との間に配置された一次放射線シールドと、
(ii)前記少なくとも1つの第1放射線検出器の方向に向けられた入射放射線を妨げるように展開された少なくとも1つの第1の追加放射線シールドと、
(iii)前記少なくとも1つの第2放射線検出器の方向に向けられた入射放射線を妨げるように展開された少なくとも1つの第2の追加放射線シールドと、
を備える、請求項20に記載のセンサ。
【請求項23】
前記少なくとも1つの第1の追加放射線シールドおよび前記少なくとも1つの第2の追加放射線シールドは各々、前記一次放射線シールドの方向に傾斜される、請求項22に記載のセンサ。
【請求項24】
前記少なくとも1つの第1放射線検出器および前記少なくとも1つの第2放射線検出器は対として編成され、各対は第1部材および第2部材を有し、前記一次および追加放射線シールドの各放射線シールドは、前記出力信号が前記回転角により変化するように、前記対の1つの前記第1部材の1つと前記第2部材の1つとの間に配置される、請求項22に記載のセンサ。
【請求項25】
さらに、回転軸を中心に回転角だけ前記少なくとも1つの機能構成部品を回転させることができる、請求項17に記載のセンサ。
【請求項26】
装置の位置を決定する方法であって、
(a)関連付けられた放射線源を有する装置を提供するステップと、
(b)前記放射線源に対する方向を決定するステップと、
(c)前記放射線源に対する少なくとも第2方向をさらに決定するステップと、
(d)前記第1の方向と前記少なくとも第2の方向の交点を算出することによって前記装置を位置標定するステップと、
を含む、方法。
【請求項27】
前記放射線源に対する少なくとも第2方向をさらに決定するステップが、前記放射線源に対する少なくとも第3方向を決定するステップを含み、
(e)前記第1方向、前記第2方向、および前記少なくとも第3方向の交点を算出するステップ、
をさらに含む、請求項26に記載の方法。
【請求項28】
追跡可能な医療装置を製造する方法であって、検出可能な量の放射性同位元素を医療装置に組み込むか、あるいは固定して取り付けるステップを含む、方法。
【請求項29】
前記検出可能な量は0.01mCiから0.5mCiの範囲内である、請求項28に記載の方法。
【請求項30】
前記検出可能な量は0.1mCi以下である、請求項28に記載の方法。
【請求項31】
前記検出可能な量は0.05mCi以下である、請求項28に記載の方法。
【請求項32】
前記同位元素はイリジウム192である、請求項28に記載の方法。
【請求項33】
非撮像位置標定または追跡のための標的としての0.1mCi以下の放射能を持つ電離放射線源の使用。
【請求項1】
電離放射線源を追跡および位置標定するためのコンピュータ化システムであって、
(a)放射線源から電離放射線を受け取って出力信号を生成することのできる少なくとも1つの放射線検出器を備えた、少なくとも1つの非撮像センサモジュールと、
(b)前記出力信号を受け取って前記出力信号を方向情報に変換するように設計および構成されたCPUと、
を備える、システム。
【請求項2】
放射線源は医療装置と一体的に形成されるか、または医療装置に取り付けられる、請求項1に記載のシステム。
【請求項3】
前記少なくとも1つのセンサモジュールは少なくとも2つのセンサモジュールを含む、請求項1に記載のシステム。
【請求項4】
前記少なくとも2つのセンサモジュールは少なくとも3つのセンサモジュールを含む、請求項3に記載のシステム。
【請求項5】
前記少なくとも1つのセンサモジュールのうちの少なくとも1つは、前記センサモジュールを新しい位置に移動させるように前記センサモジュールに並進運動をもたらすことのできる推進装置をさらに備える、請求項1に記載のシステム。
【請求項6】
前記推進装置は前記CPUからの並進運動信号によって動作可能である、請求項5に記載のシステム。
【請求項7】
前記システムは、(c)画像信号を前記CPUに提供することのできる撮像モジュールをさらに備え、前記CPUは前記画像信号を被験者の身体の一部分の画像に変換することができる、請求項1に記載のシステム。
【請求項8】
表示装置をさらに備える、請求項1に記載のシステム。
【請求項9】
表示装置をさらに備える、請求項7に記載のシステム。
【請求項10】
前記表示装置は、被験者の身体の前記一部分の前記画像を、被験者の身体の前記一部分の前記画像の上に医療装置の決定された位置を重ね合わせた状態で表示することができる、請求項9に記載のシステム。
【請求項11】
前記CPUは前記出力信号の少なくとも2つを受け取り、前記出力信号に基づいて前記放射線源の位置を算出する、請求項1に記載のシステム。
【請求項12】
前記CPUは前記出力信号の少なくとも3つを受け取り、前記少なくとも3つの出力信号に基づいて前記放射線源の位置を算出する、請求項1に記載のシステム。
【請求項13】
前記CPUは、前記放射線源の位置が時間の関数としてプロットされるように、間隔をおいて位置を繰返し算出する、請求項12に記載のシステム。
【請求項14】
前記放射線源は6ヶ月から18ヶ月の範囲の半減期を持つ同位元素を使用する、請求項1に記載のシステム。
【請求項15】
前記放射線を提供することができる前記放射線源をさらに備える、請求項1に記載のシステム。
【請求項16】
前記方向情報は、前記放射線源が0.01mCiから0.5mCiの範囲の放射能を有するときに生成される、請求項1に記載のシステム。
【請求項17】
電離放射線源を方向的に位置標定するためのセンサであって、
(a)少なくとも1つの機能構成部品と、
(b)前記少なくとも1つの機能構成部品を移動させることによって、センサに角感度を与える変位機構と、
を備える、センサ。
【請求項18】
前記少なくとも1つの機能構成部品は、放射線源からの放射線を受け取りかつ出力信号を生成することのできる少なくとも1つの放射線検出器を備え、
前記変位機構は、前記出力信号が回転角により変化するように、前記少なくとも1つの放射線検出器を回転角だけ回転させることができる、請求項17に記載のセンサ。
【請求項19】
前記少なくとも1つの放射線検出器は、少なくとも1つの第1放射線検出器および少なくとも1つの第2放射線検出器を備え、前記出力信号は、前記少なくとも1つの第1放射線検出器からの少なくとも1つの第1出力信号、および前記少なくとも1つの第2放射線検出器からの少なくとも1つの第2出力信号を含む、請求項18に記載のセンサ。
【請求項20】
前記少なくとも1つの第1放射線検出器からの前記第1出力信号の大きさおよび前記第2放射線検出器からの前記第2出力信号の大きさが前記回転角により変化するように、前記少なくとも1つの第1放射線検出器および前記少なくとも1つの第2放射線検出器に対して一定の角度に設置された少なくとも1つの放射線シールドをさらに備える、請求項19に記載のセンサ。
【請求項21】
(a)少なくとも1つの第1放射線検出器および少なくとも1つの第2放射線検出器であって、その各々が放射線源から放射線を受け取り、前記少なくとも1つの第1放射線検出器から少なくとも1つの第1出力信号を生成し、かつ前記少なくとも1つの第2放射線検出器から少なくとも1つの第2出力信号を生成することのできる、少なくとも1つの第1放射線検出器および少なくとも1つの第2放射線検出器と、
(b)前記少なくとも1つの第1放射線検出器からの前記第1出力信号の大きさおよび前記第2放射線検出器からの前記第2出力信号の大きさが各々シールドの回転角により変化するように、シールドの回転軸を中心にシールド回転角だけ回転可能である少なくとも1つの放射線シールドと、
を備える、請求項17に記載のセンサ。
【請求項22】
前記少なくとも1つの放射線シールドは、
(i)前記少なくとも1つの第1放射線検出器と前記少なくとも1つの第2放射線検出器との間に配置された一次放射線シールドと、
(ii)前記少なくとも1つの第1放射線検出器の方向に向けられた入射放射線を妨げるように展開された少なくとも1つの第1の追加放射線シールドと、
(iii)前記少なくとも1つの第2放射線検出器の方向に向けられた入射放射線を妨げるように展開された少なくとも1つの第2の追加放射線シールドと、
を備える、請求項20に記載のセンサ。
【請求項23】
前記少なくとも1つの第1の追加放射線シールドおよび前記少なくとも1つの第2の追加放射線シールドは各々、前記一次放射線シールドの方向に傾斜される、請求項22に記載のセンサ。
【請求項24】
前記少なくとも1つの第1放射線検出器および前記少なくとも1つの第2放射線検出器は対として編成され、各対は第1部材および第2部材を有し、前記一次および追加放射線シールドの各放射線シールドは、前記出力信号が前記回転角により変化するように、前記対の1つの前記第1部材の1つと前記第2部材の1つとの間に配置される、請求項22に記載のセンサ。
【請求項25】
さらに、回転軸を中心に回転角だけ前記少なくとも1つの機能構成部品を回転させることができる、請求項17に記載のセンサ。
【請求項26】
装置の位置を決定する方法であって、
(a)関連付けられた放射線源を有する装置を提供するステップと、
(b)前記放射線源に対する方向を決定するステップと、
(c)前記放射線源に対する少なくとも第2方向をさらに決定するステップと、
(d)前記第1の方向と前記少なくとも第2の方向の交点を算出することによって前記装置を位置標定するステップと、
を含む、方法。
【請求項27】
前記放射線源に対する少なくとも第2方向をさらに決定するステップが、前記放射線源に対する少なくとも第3方向を決定するステップを含み、
(e)前記第1方向、前記第2方向、および前記少なくとも第3方向の交点を算出するステップ、
をさらに含む、請求項26に記載の方法。
【請求項28】
追跡可能な医療装置を製造する方法であって、検出可能な量の放射性同位元素を医療装置に組み込むか、あるいは固定して取り付けるステップを含む、方法。
【請求項29】
前記検出可能な量は0.01mCiから0.5mCiの範囲内である、請求項28に記載の方法。
【請求項30】
前記検出可能な量は0.1mCi以下である、請求項28に記載の方法。
【請求項31】
前記検出可能な量は0.05mCi以下である、請求項28に記載の方法。
【請求項32】
前記同位元素はイリジウム192である、請求項28に記載の方法。
【請求項33】
非撮像位置標定または追跡のための標的としての0.1mCi以下の放射能を持つ電離放射線源の使用。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公表番号】特表2008−510136(P2008−510136A)
【公表日】平成20年4月3日(2008.4.3)
【国際特許分類】
【出願番号】特願2007−525451(P2007−525451)
【出願日】平成17年8月11日(2005.8.11)
【国際出願番号】PCT/IL2005/000871
【国際公開番号】WO2006/016368
【国際公開日】平成18年2月16日(2006.2.16)
【出願人】(507046934)ナヴォテック メディカル リミテッド (2)
【Fターム(参考)】
【公表日】平成20年4月3日(2008.4.3)
【国際特許分類】
【出願日】平成17年8月11日(2005.8.11)
【国際出願番号】PCT/IL2005/000871
【国際公開番号】WO2006/016368
【国際公開日】平成18年2月16日(2006.2.16)
【出願人】(507046934)ナヴォテック メディカル リミテッド (2)
【Fターム(参考)】
[ Back to top ]