
装入装置およびその制御方法
【課題】駆動系統を簡略化しつつシュートの傾斜角度を常時検出できる装入装置を提供すること。
【解決手段】フレームに支持されて旋回軸を中心に回転自在な旋回部分であるロータと、ロータに支持されたシュートと、ロータに対する回転角度に応じてシュートの傾斜角度を変化させる調整機構であるホルダと、ロータを回転させる旋回駆動モータと、ホルダを回転させる調整駆動モータとを有するとともに、ロータに、シュートの傾斜角度を検出する調整角度センサ89と、調整角度センサ89の検出信号を制御装置に送信する送信装置92と、調整角度センサ89に電力を供給する機上電源装置93とを設け、機上電源装置93として蓄電池およびこれに充電する充電器を設ける。
【解決手段】フレームに支持されて旋回軸を中心に回転自在な旋回部分であるロータと、ロータに支持されたシュートと、ロータに対する回転角度に応じてシュートの傾斜角度を変化させる調整機構であるホルダと、ロータを回転させる旋回駆動モータと、ホルダを回転させる調整駆動モータとを有するとともに、ロータに、シュートの傾斜角度を検出する調整角度センサ89と、調整角度センサ89の検出信号を制御装置に送信する送信装置92と、調整角度センサ89に電力を供給する機上電源装置93とを設け、機上電源装置93として蓄電池およびこれに充電する充電器を設ける。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、装入装置およびその制御方法に関し、高炉などの容器内部に装入物を装入する装置に関する。
【背景技術】
【0002】
従来、製銑用の高炉においては、炉内に装入物を装入する設備として装入装置が用いられている。同様な装入装置は、他の反応炉や反応塔、触媒容器など、容器内部に内容物を充填する際にも用いられている。
このような装入装置においては、容器内における装入物の平面分布を均一にする等、装入物を所望の状態とすることが要求される。このために、装入装置においては、装入物の散布方向や散布状態を自由に制御することが求められ、様々な散布機構が開発されている。
【0003】
特許文献1の装置は、装入物を送り出す円筒状または樋状のシュートを旋回部分に傾斜して設置し、この旋回部分をシュートとともに鉛直な旋回軸まわりに旋回させることで、シュートの先端から放出される装入物をドーナツ状に散布する。さらに、旋回軸に対するシュートの傾斜角度を調整することで、シュートから放出される装入物の到達領域を変更し、これにより散布状態の制御を実現している。
【0004】
特許文献1の装置では、シュートは傾斜角度の調整機構を介して旋回部分に支持されている。旋回部分を旋回駆動するために旋回駆動モータが用いられ、旋回駆動モータの出力は調整機構にも伝達されている。調整機構と旋回駆動モータとの間には差動機構(遊星歯車)が介在され、差動機構の3つめの軸には調整駆動モータが接続されている。このような構成において、中間歯車の減速比を正しく選択すれば、旋回駆動モータにより調整機構と旋回部分とが一体に回転するようにできる。また、調整駆動モータを作動させることで、差動機構から旋回動作に対する相対回転(相対角度、位相差の変化)が調整機構に伝達され、調整機構においては伝達された相対回転に応じてシュートの傾斜角度の調整動作が行われる。
【0005】
前述した特許文献1では、シュートの傾斜角度の調整機構と旋回部分を旋回駆動モータの駆動により一体的に旋回させ、調整駆動モータの駆動により調整機構を駆動させるために、差動機構を介在させている。このような差動機構があると、装置としての構造が複雑化し、設備コストも上昇する。さらに、複雑な機構の旋回を維持するために保守点検が煩雑になる。
【0006】
これに対し、本願の出願人により、シュートの旋回軸まわりに回転するロータと、旋回機構に支持されて旋回軸に対して傾斜した調整軸まわりに回転するホルダとを設置し、このホルダにシュートを支持した構成が提案されている(特許文献2参照)。
特許文献2では、通常はこれらのロータおよびホルダを同期回転させることでシュートを一定の傾斜角度で旋回させるとともに、ロータに対してホルダを相対回転させることにより、シュートの傾斜角度を調整することができる。
【0007】
このような構成の駆動には、特許文献1と同様に、差動機構と旋回駆動モータおよび調整駆動モータとを用い、通常は旋回駆動モータだけでロータとホルダとを同期回転させ、シュート角度の調整時には調整駆動モータと差動機構とによりロータとホルダとを相対回転させる(特許文献2の段落0048〜0049および図16参照)。
また、ロータおよびホルダに対して個別の駆動モータを用い、各々の回転を個別に制御することで、差動機構を用いずに旋回動作および傾斜角度調整を行うことができる。つまり、ロータおよびホルダを同期回転させることで、シュートを現状角度のまま旋回動作させることができ、あるいはロータとホルダとを相対回転させることでシュートの傾斜角度調整を行うことができる(特許文献2の段落0038および図1、段落0047および図15参照)。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開昭49−41205号公報
【特許文献2】国際公開第2011/043454号
【発明の概要】
【発明が解決しようとする課題】
【0009】
ところで、前述したロータおよびホルダを有する構成において、例示した二つの駆動方式には次のような問題がある。
前述した駆動系統に差動機構を用いる方式では、駆動力の伝達に耐えられる大型の差動機構が必要になり、装入装置としての軽量化、小型化に適さないという問題がある。
前述した個別の駆動モータを用いる方式では、個々の駆動モータの回転速度および位相により旋回軸に対するシュートの傾斜角度を制御する。この際、旋回軸に対するシュートの傾斜角度は、各駆動モータの回転角度から演算が可能であるが、停電後の復旧など初期位置を設定する必要があり、ロータに設置した角度センサによりホルダおよびシュートの角度を実測することが求められる。
しかし、ロータは固定側のフレーム等に対して旋回するものであるため、角度センサの検出信号の配線あるいは検出回路用の電源配線などの処理が難しいという問題があった。
【0010】
本発明の主な目的は、駆動系統および検出機構の構造を簡略化しつつシュート角度調整を含む動作制御を適切に行える装入装置およびその制御方法を提供することである。
【課題を解決するための手段】
【0011】
本発明の装入装置は、フレームに支持されて旋回軸を中心に回転自在な旋回部分と、前記旋回部分に支持されたシュートと、前記旋回部分に対する回転角度に応じて前記シュートの傾斜角度を変化させる調整機構と、前記旋回部分を回転させる旋回駆動モータと、前記調整機構を回転させる調整駆動モータとを有するとともに、前記旋回部分に、前記シュートの傾斜角度を検出する調整角度センサと、前記調整角度センサに電力を供給する蓄電池と、前記蓄電池に充電する充電器とを有することを特徴とする。
【0012】
本発明において、前記充電器は、前記旋回部分の外周に設置された誘導コイルと、前記フレームに設置されて前記誘導コイルに対向する磁性体とを有し、前記旋回部分の回転により前記誘導コイルに発生する起電力で前記蓄電池を充電する発電機を備えるものが利用できる。
本発明において、前記充電器は、一方が前記旋回部分の外周に設置されかつ他方が前記フレームに設置された電磁カップリングを有し、前記電磁カップリングを介して外部から供給される電力で前記蓄電池を充電する電力線を備えるものでもよい。
さらに、本発明では、これらの発電機および電力線を両方備えたものとしてもよい。
【0013】
このような本発明においては、調整角度センサが旋回部分に設置され、シュートの傾斜角度を直接的に検出することができる。このため、調整角度センサがフレーム側に設置され、シュートの傾斜角度を旋回部分の外部から間接的に検出する場合に比べ、検出精度を高めることができるとともに、検出機構の構造を簡略化することができる。
そして、調整角度センサは、旋回部分に設置されてフレームに対して常に移動するが、本発明に基づく蓄電池および充電器により、固定側のフレーム等に対して非接触のまま電力を確実に得ることができる。
【0014】
本発明において、充電器として発電機を採用するならば、高炉の装入装置など常時旋回する部分に適用された際には定常的に安定した電力が確保できる。
また、充電器として電力線を採用するならば、所定位置で停止した状態で電力供給を受けて充電器に充電することができる。このような電力線では、旋回状態では電力供給が受けられないが、機器構成を簡略化することができる。
これらの発電機および電力線は、スリップリングのような摺動式の電気的接続を用いないため、高炉の装入装置のような塵埃の大量に生じる部分にも使用しても確実な動作が得られる。
【0015】
本発明において、調整角度センサとしては、旋回部分に対するシュートの傾斜角度を直接検出するもの、調整機構における回転動作等を検出してシュートの傾斜角度を演算するもの等が利用できる。このような調整角度センサにより、シュートの傾斜角度を検出し、調整機構に所望の調整動作を行わせるべく旋回駆動モータと協調するように、調整駆動モータを制御することができる。
本発明において、旋回部分の旋回軸まわりの角度位置を検出するために、旋回角度センサを設置することが望ましい。旋回角度センサとしては、フレームに対する旋回部分の回転を直接検出するもの、旋回駆動モータの回転を検出するもの、あるいは制御装置から旋回駆動モータの動作情報を取得して旋回角度を演算するもの等が利用できる。このような旋回角度センサにより、シュートおよび旋回部分の旋回状態を検出し、旋回部分に所望の旋回動作を行わせるべく、旋回駆動モータを制御することができる。
【0016】
本発明の装入装置では、旋回部分および調整機構に対して個別に駆動モータが設置されており、旋回部分を旋回駆動モータにより駆動し、調整機構を調整駆動モータにより駆動することで、所期の旋回動作および調整動作を実行することができる。
この際、旋回部分の旋回角度を旋回角度センサ等により検出しつつ、前述した調整角度センサによりシュートの傾斜角度を検出することで、所期の旋回動作および調整動作となるように個々の駆動モータを制御する。
すなわち、旋回駆動モータによる旋回部分の回転と調整駆動モータによる調整機構の旋回軸を中心とした回転とが同じ回転速度である時(相対回転が0の時)、旋回部分と調整機構とは同期して回転され、シュートを含めて一体に旋回する。この状態では、調整機構における旋回部分に対する相対回転が0であるため、シュートの傾斜角度は変化しない(通常の旋回動作)。
【0017】
一方、旋回駆動モータによる旋回部分の回転速度と調整駆動モータによる調整機構の旋回軸を中心とした回転速度との同期を解除し、互いに異なる回転速度にすると、調整機構においては旋回部分に対する相対回転に応じてシュートの傾斜角度が変化する。すなわち、旋回駆動モータを停止させて調整駆動モータだけ作動させることで、基本的な旋回動作は停止され、シュートの傾斜角度が調整される。あるいは、旋回駆動モータと調整駆動モータとを異なる速度で回転させることで、シュートおよび旋回部分の旋回を行いつつ、相対回転に応じて傾斜角度が調整される(傾斜角度の調整動作)。
従って、本発明では、旋回駆動モータから旋回部分に至る駆動経路および調整駆動モータから調整機構に至る駆動経路は何れも差動機構(特許文献1の駆動機構、特許文献2の段落0048〜0049および図16参照)を必要とせず、これらの大きな駆動力が要求される駆動経路の途中に複雑な遊星歯車等を設置しないでよいため、駆動機構を簡略化することができ、駆動経路中の差動機構に起因する装置の大型化や高コスト化を回避することができる。
【0018】
本発明において、旋回動作および調整動作を行うための旋回部分および調整機構としては、前述した特許文献1の構造、つまり、旋回部分にシュートを回動自在に支持し、このシュートの回動軸に扇形歯車を接続し、この扇形歯車を調整駆動モータで駆動する構成を用いてもよい。
ただし、本発明において、旋回部分および調整機構としては、前述した特許文献2と同様なロータおよびホルダを有する構成を採用することが望ましい。
【0019】
本発明の装入装置において、前記フレームに支持されて前記旋回軸を中心に回転可能なロータと、前記ロータに設定されて前記旋回軸に第1角度で交差する調整軸と、前記ロータに支持されて前記調整軸を中心に回転可能なホルダと、前記ホルダに固定されて前記調整軸に第2角度で交差する方向へ延びるシュートと、前記フレームに固定されて前記ロータを前記フレームに対して回転させる旋回駆動モータと、前記フレームに支持されて前記旋回軸を中心に回転可能な伝達側傘歯歯車と、前記ホルダに固定されて前記伝達側傘歯歯車に噛み合うホルダ側傘歯歯車と、前記フレームに固定されて前記伝達側傘歯歯車を回転させることで前記ホルダを前記ロータに対して回転させる調整駆動モータと、を有するとともに、前記調整角度センサは、前記ホルダおよび前記ロータの前記調整軸まわりの相対角度から前記旋回軸に対する前記シュートの傾斜角度を検出するものであり、前記蓄電池および前記充電器は、前記ロータまたは前記ホルダに設置されている構成とすることができる。
【0020】
このような本発明では、フレームにロータが支持され、ロータにホルダが支持され、ホルダにシュートが固定される。旋回駆動モータによりロータを回転させることで、基本的な旋回動作が行われるとともに、調整駆動モータによりホルダをロータに対して回転させることで、シュートの角度を変更できる。
【0021】
すなわち、調整軸は旋回軸に対して第1角度で交差し、シュートは調整軸に対して第2角度で交差するため、ホルダとロータとが相対回転すると、旋回軸に対するシュートの角度は、第1角度と第2角度との差(最小値)から第1角度と第2角度との和(最大値)までの間で変化する。その結果、フレームおよびロータに対するシュートの角度が前述した最大値から最小値までの範囲で任意に選択することができる。
【0022】
ここで、本発明では、ホルダ側傘歯歯車と伝達側傘歯歯車とは、ロータが旋回軸を中心に回転しても常に噛み合っており、旋回軸を中心に伝達側傘歯歯車を回転させることにより、ホルダをロータに対して調整軸を中心に回転させることができる。伝達側傘歯歯車は旋回軸を中心に回転するため、歯車列等の伝達経路を介してフレームに固定された調整駆動モータから駆動力を伝達することができる。
【0023】
本発明では、旋回駆動モータがロータを単独で回転させ、調整駆動モータが伝達側傘歯歯車を単独で回転させ、つまり旋回駆動モータによるロータの駆動と調整駆動モータによる傘歯歯車の駆動とが各々独立している。
このため、通常時は、ロータと伝達側傘歯歯車とを同期回転させることで、シュートの角度が一定の状態でこれらのロータおよびホルダ、シュートを旋回させることができる。一方、調整時には、ロータと伝達側傘歯歯車が異なる回転数で回転するように、調整駆動モータの回転数を制御することで、ロータに対する伝達側傘歯歯車の位相が変更され、ホルダ側傘歯歯車に駆動力が伝達され、ロータに対してホルダが調整軸を中心に回転し、その結果シュートの角度が変更される。
【0024】
このように、本発明においては、旋回駆動モータでシュートを旋回させることにより基本的な散布動作を行うとともに、調整駆動モータによりロータと伝達側傘歯歯車の位相を調整することで、旋回軸に対するシュートの角度、つまりフレームおよびロータに対するホルダおよびシュートの角度を調整することができ、旋回による散布の半径を調整することができる。
【0025】
このような本発明では、基本的な旋回動作を継続しつつ、シュートの角度調整を行うことができるため、制御は非常に簡略化される。さらに、電気的に各駆動モータの差分を検出する方式では、信頼性向上ため、シュート傾斜角度のプリセット用センサをシュートに設けるなどの工夫が必要になるところ、本発明では、このような工夫が不要となる。また、ロータやホルダおよびその支持構造、旋回駆動モータからロータに至る伝達経路については機能的にも単純であり、構造の複雑化を回避することができる。調整駆動モータからホルダに至る伝達経路についても、前述の傘歯歯車を利用した簡単な構成で実現することができ、構造の複雑化を回避することができる。
【0026】
上述のような本発明の装入装置においては、さらに下記のような構成とし、あるいは下記のような制御方法を採用することで、装入動作を高精度に行わせることができる。
【0027】
本発明の装入装置において、前記シュートの傾斜角度を所定の角度とする際に、前記調整角度センサで検出される角度を参照しつつ前記調整駆動モータを制御する制御装置を備え、前記制御装置は、
入力操作に対応する指令を出力可能な入力部と、この入力部から入力される、前記旋回駆動モータに対して設定された回転速度を表す指令に基づいて、前記旋回駆動モータを回転させる第1モータコントローラと、前記入力部から入力される前記所定の角度と前記調整角度センサで検出された前記シュートの傾斜角度との偏差を演算する偏差演算手段と、前記偏差演算手段で演算された偏差に基づいて、前記調整駆動モータの回転速度を変更するための補正速度を演算する補正速度演算手段と、前記入力部からの指令に基づく回転速度と前記補正速度演算手段で演算された補正速度とを加算する加算器と、前記加算器における加算で得られた回転速度で、前記調整駆動モータを回転させる第2モータコントローラと、を備え、前記補正速度演算手段は、前記調整駆動モータの回転速度の変更後に前記偏差演算手段で新たに演算される偏差が、回転速度の変更前に演算された偏差よりも小さくなるような補正速度を演算することが望ましい。
【0028】
本発明の装入装置の制御方法は、前述した本発明の装入装置の制御を行う方法であって、入力操作に対応する指令を出力可能な入力部から入力される、前記旋回駆動モータに対して設定された回転速度を表す指令に基づいて、前記旋回駆動モータを回転させる第1モータコントロール工程と、前記入力部から入力される前記所定の角度と前記調整角度センサで検出された前記シュートの傾斜角度との偏差を演算する偏差演算工程と、前記偏差演算工程で演算された偏差に基づいて、前記調整駆動モータの回転速度を変更するための補正速度を演算する補正速度演算工程と、前記入力部からの指令に基づく回転速度と前記補正速度演算工程で演算された補正速度とを加算する加算工程と、
前記加算工程における加算で得られた回転速度で、前記調整駆動モータを回転させる第2モータコントロール工程と、を備え、前記補正速度演算工程は、前記調整駆動モータの回転速度の変更後に前記偏差演算工程で新たに演算される偏差が、回転速度の変更前に演算された偏差よりも小さくなるような補正速度を演算することが望ましい。
【0029】
このような本発明の装入装置および装入装置の制御方法では、入力部から入力される所定の角度と、調整角度センサで検出されたシュートの傾斜角度との偏差を、調整駆動モータの回転速度変更前よりも小さくするような補正速度を演算し、この補正速度と旋回駆動モータの回転速度とを加算した回転速度で、調整駆動モータを回転させるため、精度よくシュートの傾斜角度を一定の角度に制御できる。また、補正速度を旋回駆動モータの回転速度に加算するだけの簡単な演算で、調整駆動モータの回転速度を決定することができ、安価な構成でも対応できる。
【0030】
本発明の装入装置において、前記補正速度演算手段は、前記偏差演算手段で演算された偏差が予め設定された閾角度以上の場合には、固定された値である最大補正速度を前記補正速度として演算し、前記閾角度未満の場合には、前記偏差の大きさに応じて異なり、かつ、前記最大補正速度未満の値である偏差対応補正速度を前記補正速度として演算することが望ましい。
本発明の装入装置の制御方法において、前記補正速度演算工程では、
前記偏差演算工程で演算された偏差が予め設定された閾角度以上の場合には、固定された値である最大補正速度を前記補正速度として演算し、
前記閾角度未満の場合には、前記偏差の大きさに応じて異なり、かつ、前記最大補正速度未満の値である偏差対応補正速度を前記補正速度として演算することが望ましい。
【0031】
このような本発明の装入装置、および装入装置の制御方法では、偏差の絶対値が閾角度以上の場合には、固定値である最大補正速度を補正速度として演算するので、調整駆動モータの回転速度の最大値を所定速度以下に設定することができ、調整駆動モータの負荷を抑制できる。一方、閾角度未満の場合には、偏差の絶対値の大きさに応じて異なる偏差対応補正速度を補正速度として演算するので、偏差をほぼ0にすることができる。
【0032】
本発明の装入装置において、前記制御装置は、前記加算器と前記偏差演算手段との間に設けられ、前記加算器に前記補正速度を入力可能なオン状態と入力不可能なオフ状態とを切り替え可能な第1スイッチと、前記加算器と前記入力部との間に設けられ、前記加算器に前記入力部からの指令を入力可能なオン状態と入力不可能なオフ状態とを切り替え可能な第2スイッチと、を備え、前記加算器は、
前記第1スイッチによりオフ状態に設定され、かつ、前記第2スイッチによりオン状態に設定された場合、前記入力部からそれぞれ入力される、前記旋回駆動モータに対して設定された回転速度と、前記傾斜角度を変更するための回転速度とを加算して、その結果を前記第2モータコントローラに出力し、前記第1スイッチによりオン状態に設定され、かつ、前記第2スイッチによりオフ状態に設定された場合、前記入力部から入力される前記旋回駆動モータに対して設定された回転速度と、前記補正速度演算手段で演算された補正速度とを加算して、その結果を前記第2モータコントローラに出力することが望ましい。
【0033】
このような本発明では、第1スイッチによりオフ状態に設定し、第2スイッチによりオン状態に設定することにより、シュートの傾斜角度を作業者の所望の傾斜角度に短時間で変更することができる。さらに、第1スイッチによりオン状態に設定し、第2スイッチによりオフ状態に設定した場合には、シュートの傾斜角度をほぼ一定の角度に制御できる。
【図面の簡単な説明】
【0034】
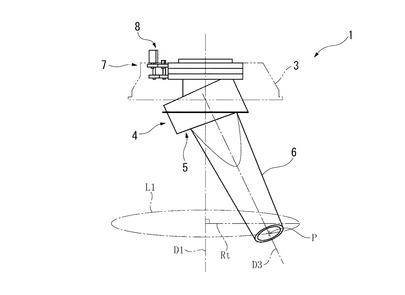
【図1】本発明の第1実施形態を示す部分破断した斜視図。
【図2】前記図1のA−A断面を示す縦断面図。
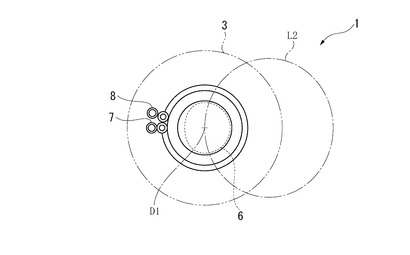
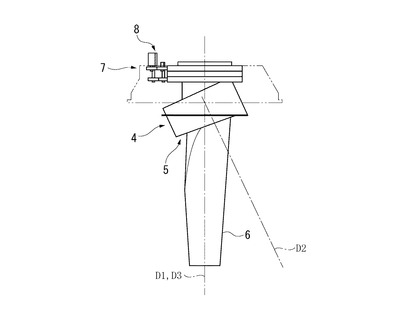
【図3】前記図1のB−B断面を示す縦断面図。
【図4】前記第1実施形態の駆動系を示す斜視図。
【図5】前記第1実施形態の最大散布角での旋回動作を示す平面図。
【図6】前記第1実施形態の最大散布角での旋回動作を示す側面図。
【図7】前記第1実施形態の中間的な散布角での旋回動作を示す平面図。
【図8】前記第1実施形態の中間的な散布角での旋回動作を示す側面図。
【図9】前記第1実施形態の最小散布角での旋回動作を示す平面図。
【図10】前記第1実施形態の最小散布角での旋回動作を示す側面図。
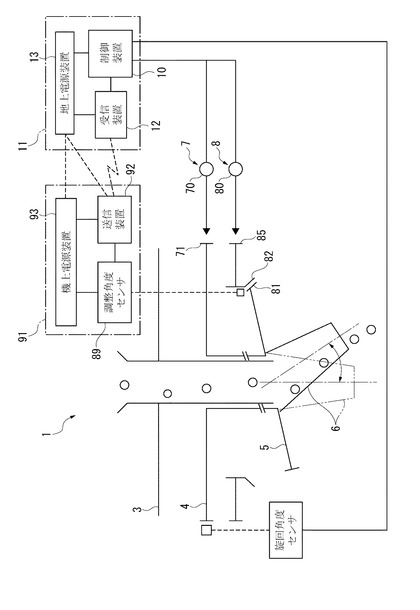
【図11】前記第1実施形態の電源装置および制御装置を示すブロック図。
【図12】前記第1実施形態の電源装置を示すブロック図。
【図13】前記第1実施形態の発電機および電力線を示す模式平面図。
【図14】本発明の第2実施形態の電源装置を示すブロック図。
【図15】本発明の第3実施形態の電源装置を示すブロック図。
【図16】本発明の第4実施形態の電源装置を示すブロック図。
【図17】本発明の第5実施形態の制御装置を示すブロック図。
【図18】前記第5実施形態の同期補正速度と増幅角度偏差との関係を示すグラフ。
【図19】本発明の第6実施形態の制御装置を示すブロック図。
【図20】前記第6実施形態の位置決め補正速度と角度偏差との関係を示すグラフ。
【図21】前記第6実施例の制御装置における制御状態を表すタイムチャート。
【図22】本発明の第7実施形態を示す斜視図。
【図23】前記第7実施形態の電源装置および制御装置を示すブロック図。
【発明を実施するための形態】
【0035】
以下、本発明の実施形態を図面に基づいて説明する。
〔第1実施形態〕
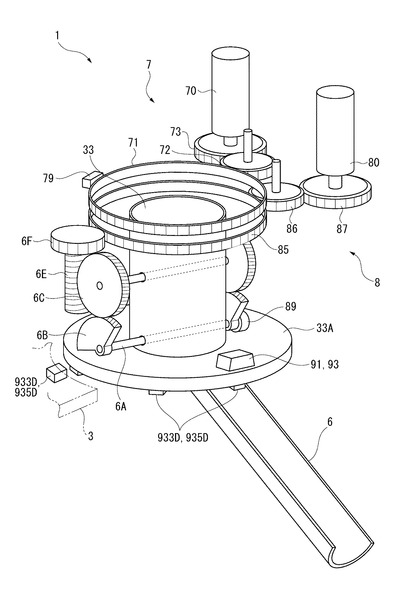
図1から図13には本発明の第1実施形態が示されている。
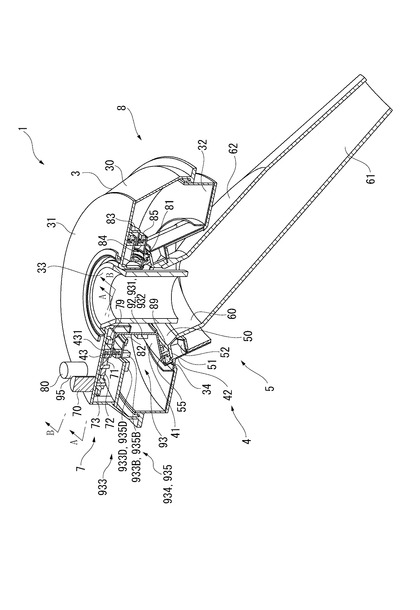
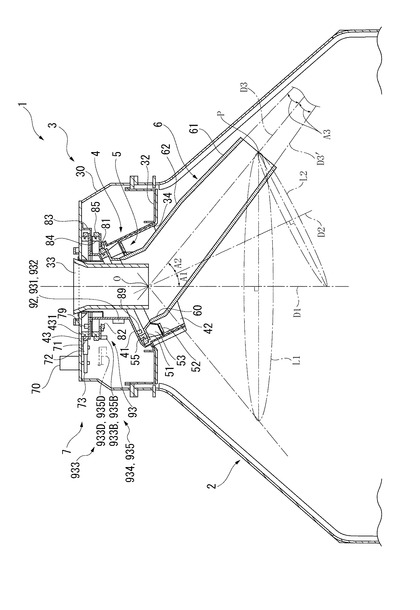
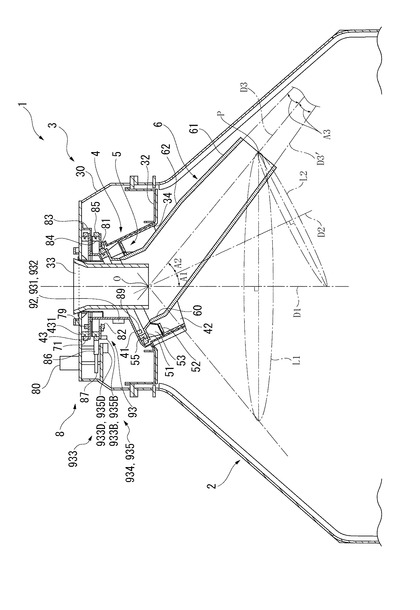
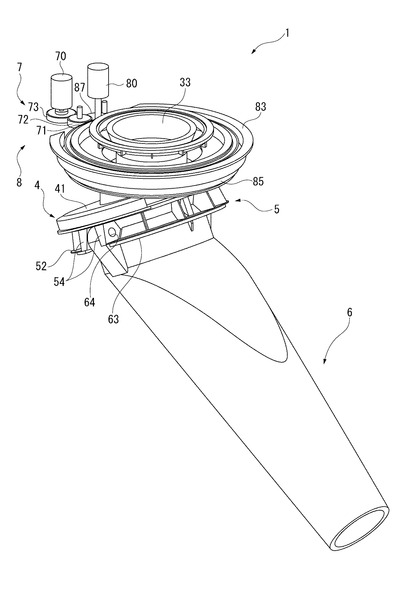
このうち、図1から図4は、本実施形態の装入装置1の基本構造を示し、図1は本実施形態の装入装置1を示す部分破断した斜視図、図2は図1のA−A断面(後述する旋回駆動モータ70を通る断面)を示す縦断面図、図3は図1のB−B断面(後述する調整駆動モータ80を通る断面)を示す縦断面図、図4は本実施形態の駆動系を示す斜視図である。図5から図10は、本実施形態の装入装置1の動作を示し、図5、図7、図9は異なるシュート角度での旋回動作を示す平面図であり、図6、図8、図10はシュート角度の調整動作を示す側面図である。図11から図13は、本実施形態の装入装置1における電源装置および制御装置の構成を示す。
【0036】
(基本構造)
本実施形態の装入装置1は、高炉2の炉頂部に設置されて炉内に鉄鉱石および石炭を主体とする装入物を散布するものである。
高炉2の炉頂部は円錐台状に形成され、その上部開口にはフレーム3が設置されている。フレーム3には旋回部分としてのロータ4が支持され、ロータ4には調整機構としてのホルダ5が支持され、ホルダ5にはシュート6が支持されている。
【0037】
本実施形態の装入装置1においては、旋回軸D1、調整軸D2、シュート中心軸D3が設定され、前述したフレーム3、ロータ4、ホルダ5およびシュート6はこれらの各軸に従って設置される(図2および図3参照)。
旋回軸D1は、鉛直方向の軸線であり、高炉2の中心軸線と一致する。
調整軸D2は、交点Oにおいて旋回軸D1と交差しており、互いの交差角度は第1角度A1とされている。
シュート中心軸D3は、前述した交点Oにおいて調整軸D2と交差しており、互いの交差角度は第2角度A2とされている。
【0038】
シュート中心軸D3は、シュート6から散布される装入物が炉内に散布される方向を規定するものであり、通常はシュート6の円錐台形状の底面方向とされる。
【0039】
詳細は後述するが、ホルダ5はロータ4に対して調整軸D2まわりに回転する。このようなロータ4に対するホルダ5の回転に伴い、シュート中心軸D3は調整軸D2に対する第2角度A2を保ったまま調整軸D2まわりに回転する。この回転により、シュート6の先端開口における点Pは、軌跡L2に沿って円形に移動する。
【0040】
このような回転により、シュート中心軸D3の旋回軸D1に対する方向(つまりフレーム3に対する方向)が変化し、図2および図3におけるシュート中心軸D3は、図中一点鎖線で示す状態から交点Oを中心に図中左側へと振れることになる。
【0041】
詳細は後述するが、ホルダ5およびロータ4はフレーム3に対して旋回軸D1まわりに回転する(旋回部分)。このようなロータ4およびホルダ5の回転に伴い、シュート6の先端の点Pは軌跡L1に沿って旋回する。図2および図3の状態では、シュート中心軸D3は旋回軸D1に対して最大角度をなしており、軌跡L1は最大である。
【0042】
ここで、ホルダ5をロータ4に対して回転させ、シュート中心軸D3を調整軸D2まわりに回転させることで、シュート中心軸D3の旋回軸D1に対する角度が小さくなってゆき、軌跡L1は徐々に小さくなる。これにより旋回散布および散布半径の調整が可能となる(調整機構)。
【0043】
本実施形態では、旋回軸D1と調整軸D2とが交差する第1角度A1が例えば20度とされ、調整軸D2とシュート中心軸D3とが交差する第2角度A2が例えば20度とされ、つまり第1角度A1と同じとされている。このため、ホルダ5の回転によりシュート中心軸D3が図2および図3の最も左寄りにある状態では、シュート中心軸D3は旋回軸D1に一致し、軌跡L1の半径が0となる。
【0044】
(旋回部分と調整機構)
装入装置1は、前述した旋回軸D1、調整軸D2、シュート中心軸D3を基準として、固定部分であるフレーム3に対し、旋回部分および調整機構であるロータ4、ホルダ5およびシュート6を旋回させる。
【0045】
フレーム3は、扁平な円筒状のケース30と、その上面を覆う上面板31と、下面を覆う下面板32とを有する。上面板31の中央には供給管33が設置され、この供給管33から供給される装入物がシュート6へと引き渡され、シュート6から高炉2内へと散布される。下面板32の中央には開口34が形成され、この開口34内にはロータ4が保持される。
【0046】
ロータ4は、供給管33の外周を囲う筒状の部分を有する上ケース41と、上ケース41の下側に接続されて内部にホルダ5を収容する下ケース42と、上ケース41の上側に接続されて、旋回用軸受431に支持されているマウント43とを備えている。
【0047】
マウント43は、上ケース41の上側に接続され、旋回用軸受431に支持され、ロータ4をフレーム3に回転自在に支持するものである。
旋回用軸受431は供給管33の周囲のフレーム3の上面板31の下面側に固定され、これによりロータ4の全体が旋回軸D1を中心に回転自在に支持されている。
ロータ4の内部には調整用軸受55が固定され、これにホルダ5が支持されている。これにより、ホルダ5は、ロータ4に対して調整軸D2を中心に回転自在に支持されている。
【0048】
図2、図3および図4に示すように、シュート6は、それぞれ円筒状の基端部60、本体61、接続部62を備えている。
基端部60は、上端がホルダ5に接続され、中心軸がホルダ5と同様に調整軸D2に一致されている。本体61は、基端部60の下端に接続され、中心軸がシュート中心軸D3に一致されている。接続部62は、前述した本体61と開口34が干渉するために切り欠いた部分で基端部60と本体61を接続させている。
【0049】
シュート6は、基端部60がホルダ5に接続され、ホルダ5がロータ4内に収容されることにより、基端部60に供給管33の先端が導入された状態とされる。この状態では、供給管33から装入物が供給されると、この装入物はシュート6を通ってその先端から高炉2内へと散布される。この際、高炉2内へ放出された時点の装入物の方向はシュート6の底面の方向D3´に沿ったものとされ、シュート6の方向を調整することで高炉2内への散布状態を制御することができる。
【0050】
より詳しくは、高炉2内へ放出される装入物は、シュート6の底面の方向D3´に沿って先端へ送られる。従って、高炉2内へ放出される装入物の方向は、シュート6の内面に沿った方向となる。ここで、シュート6の中心軸とシュート6の内面とがなす角度を第3角度A3として、第1角度A1と第2角度A2と第3角度A3との和は、シュート6に要求される最大傾斜角度となるように設定されている。なお、本実施形態では、角度A1と角度A2が同一角度とされている。
【0051】
本実施形態の装入装置1は、前述のようにシュート6から装入物を散布するにあたり、旋回部分であるロータ4とホルダ5ないしシュート6を一体に旋回させることで、装入物を高炉2内に所定半径の円周状に散布するとともに(旋回動作)、調整機構であるロータ4とホルダ5とを相対回転させることでシュート6の傾きを調整し(調整動作)、これにより散布半径を変化させて高炉2内の全域に装入物を散布できるようにしている。
これらの旋回動作および調整動作を行うために、装入装置1は、ロータ4を回転駆動する旋回駆動機構7と、ホルダ5を回転駆動する調整駆動機構8とを備えている。
【0052】
(旋回駆動機構と調整駆動機構)
旋回用軸受431の外周には歯車71が形成され、この歯車71には歯車72が噛み合わせられ、この歯車72には歯車73がかみ合わせられ、この歯車73はフレーム3の上面板31の上面に設置された旋回駆動モータ70により回転駆動される。
これらの旋回駆動モータ70、歯車71、72、73により旋回駆動機構7が構成されている。
【0053】
調整用軸受55の外周にはホルダ側傘歯歯車81が形成され、このホルダ側傘歯歯車81には伝達側傘歯歯車82が噛み合わせられている。
伝達側傘歯歯車82はフレーム3の上面板31の下面から延びる支持部材83により、フレーム3に固定されている調整用動力伝達軸受84に支持され、旋回軸D1を中心として回転自在である。ホルダ側傘歯歯車81はホルダ5と一体に調整軸D2まわりに回転するが、傘歯歯車とすることで、ホルダ側傘歯歯車81と伝達側傘歯歯車82は互いに回転力を伝達可能である。
【0054】
ホルダ側傘歯歯車81はロータ4内に収容され、伝達側傘歯歯車82はロータ4の外部に設置されるが、ロータ4の上ケース41には伝達用開口が形成されているため、相互の噛み合わせが確保されている。
【0055】
調整用動力伝達軸受84の外周には歯車85が形成され、この歯車85には歯車86が噛み合わせられ、この歯車86には歯車87が噛み合わせられ、この歯車87はフレーム3の上面板31の上面に設置された調整駆動モータ80により回転駆動される。
これらの調整駆動モータ80、ホルダ側傘歯歯車81、伝達側傘歯歯車82、歯車85、86及び87により調整駆動機構8が構成されている。
【0056】
(旋回角度センサと調整角度センサ)
装入装置1は、散布にあたってシュート6の旋回角度および傾斜角度を把握するために、旋回角度センサ79および調整角度センサ89を備えている。
【0057】
旋回角度センサ79は、フレーム3のロータ4に対向する部位に設置された変位センサで構成され、フレーム3に対するロータ4の回転を検出し、旋回部分であるロータ4、ホルダ5およびシュート6の旋回軸D1まわりの旋回角度を検出するものである。
他の構成として、旋回駆動モータ70に内蔵されたロータリーエンコーダを用い、旋回駆動モータ70の駆動軸の回転角度から旋回駆動機構7によるロータ4の旋回状態を演算してもよい。
【0058】
調整角度センサ89は、ロータ4のホルダ5に対向する部位に設置された変位センサで構成され、ロータ4に対するホルダ5の回転を検出し、調整機構としてのロータ4に対するホルダ5の調整軸D2まわりの回転角度を検出するものである。
【0059】
従って、旋回角度センサ79で検出される回転角度から、シュート6を含む旋回部分の旋回軸D1を中心とした回転角度を割り出すことができる。
また、調整角度センサ89で検出される回転角度から、ロータ4に対するホルダ5の調整軸D2を中心とした回転角度を割り出すことができ、このホルダ5の回転角度からシュート6の傾斜角度(角度A1−A2〜角度A1+A2)を演算して取得することができる。
【0060】
(旋回動作と調整動作)
本実施形態の装入装置1は、旋回駆動モータ70および調整駆動モータ80を動作させ、旋回駆動機構7および調整駆動機構8を協調動作させることにより、旋回軸D1まわりの旋回散布を行う。
そして、調整軸D2まわりにロータ4とホルダ5とを相対回転させることにより、シュート6の傾斜角度の調整により装入物の散布半径を調整し、複数の同心円状に旋回散布を繰り返してゆく。
この際、前述した旋回駆動機構7および調整駆動機構8の協調動作にあたっては、旋回角度センサ79により旋回状態を検出するとともに、調整角度センサ89によりシュート6の傾斜角度を検出し、シュート6が散布に必要な傾斜角度となるように制御を行う。
【0061】
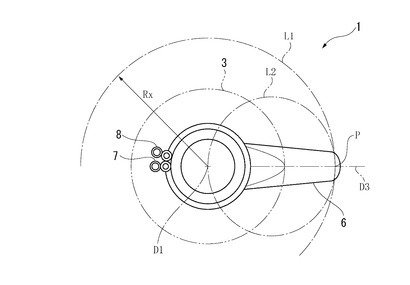
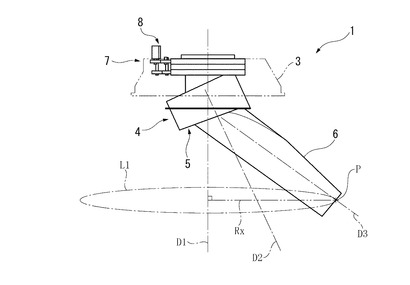
図5および図6において、シュート6を旋回軸D1に対して最も傾いた状態(角度A1+A2)では、シュート6の先端Pは旋回軸D1から最も離れた状態(半径Rx)となる。この状態でロータ4およびホルダ5を一体に回転させると、シュート6の先端Pは半径Rxの軌跡L1に沿って旋回する。
ロータ4およびホルダ5を一体に回転させるためには、調整角度センサ89で検出される角度が一定となるように調整駆動モータ80を制御して、旋回駆動機構7と調整駆動機構8とを同期させ、ロータ4およびホルダ5を同じ速度で回転させればよい。
【0062】
ロータ4に対してホルダ5を相対回転させるためには、旋回駆動機構7と調整駆動機構8との同期をずらし、例えばホルダ5の回転速度をロータ4の回転速度よりも遅くする、あるいは一時的に停止させる等とすればよい。逆にホルダ5の回転速度をロータ4の回転速度よりも速くしてもよい。この際、調整角度センサ89で検出される角度が所望の角度まで変化するように調整駆動モータ80を制御する。
シュート6を、旋回軸を中心とした回転の特定の回転角度で停止するときはシュート6が旋回角度センサ79の特定の角度で停止するように旋回駆動モータ70を制御する。
【0063】
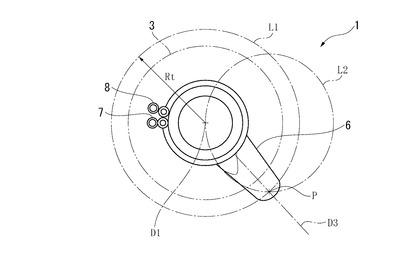
図7および図8において、シュート6の先端Pを軌跡L2に沿って移動させ、シュート6と旋回軸D1との傾き角度を小さくすることで、シュート6の先端Pの旋回軸D1からの距離(半径Rt)も小さくなる。この状態でロータ4およびホルダ5を一体に回転させることで、シュート6の先端Pは半径Rtの軌跡L1に沿って旋回する。
【0064】
図9および図10において、シュート6の先端Pを軌跡L2に沿って更に移動させ、シュート6と旋回軸D1とを一致させることで、互いの傾き角度が0となり、シュート6の先端Pの旋回軸D1からの距離(半径)も0となる。この状態では、シュート6の先端Pは旋回軸D1位置で旋回する。
このようにしてシュート6の先端Pの旋回半径を調整することができ、各旋回半径において旋回しつつ装入物を散布することで、高炉2内に均一にあるいは任意の分布で装入物を散布することができる。
【0065】
(制御装置と電源装置)
前述した通り、装入装置1は、フレーム3に支持されて旋回軸D1を中心に回転自在なロータ4およびホルダ5と、ホルダ5に支持されたシュート6とを有し、ロータ4に対するホルダ5の回転角度に応じてシュート6の傾斜角度を変化させる構成とされ、ロータ4を旋回軸D1まわりに回転させる旋回駆動モータ70と、ホルダ5を調整軸D2まわりに回転させる調整駆動モータ80とを有する。
これらの旋回駆動モータ70および調整駆動モータ80を制御するために、装入装置1は制御装置10(図11参照)を備えている。
【0066】
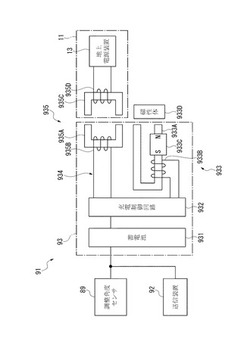
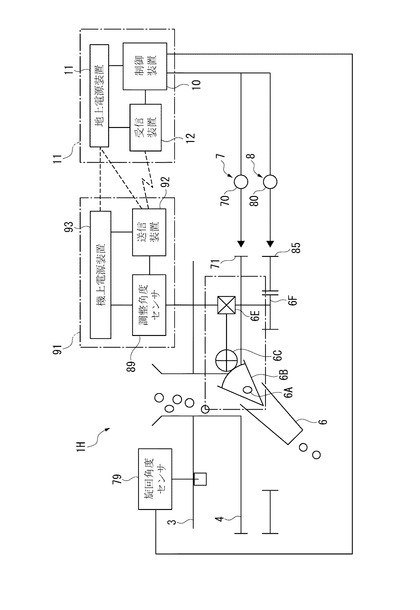
図11において、装入装置1はフレーム3の外部、例えば装入装置1が設置される高炉から離れた制御室などに設置された地上装置11と、フレーム3の内部のロータ4上に設置された機上装置91とを備えている。
地上装置11は、前述した制御装置10と、外部からの通信を受信して制御装置10に伝達する受信装置12と、これらの受信装置12および制御装置10に電力を供給する地上電源装置13とを備えている。
制御装置10は、別途登録された所定の動作プログラムに基づいて、前述した旋回角度センサ79および調整角度センサ89からの検出出力を参照しつつ、旋回駆動モータ70および調整駆動モータ80を制御することにより、装入装置1に所期の旋回動作および調整動作(後述)を実行させるものである。
【0067】
図11および図1〜図3にも示すように、旋回角度センサ79、旋回駆動モータ70および調整駆動モータ80は、それぞれ固定側であるフレーム3に設置されており、制御装置10との間の制御信号および電力供給用の配線はフレーム3を経由して適宜設置される(図示省略)。
しかし、調整角度センサ89は、ロータ4に設置されており、ロータ4がフレーム3に対して回転するため、制御装置10に直接接続することができない。このため、ロータ4に設置された機上装置91を介して制御装置10に、一部非接触の状態で接続される。
【0068】
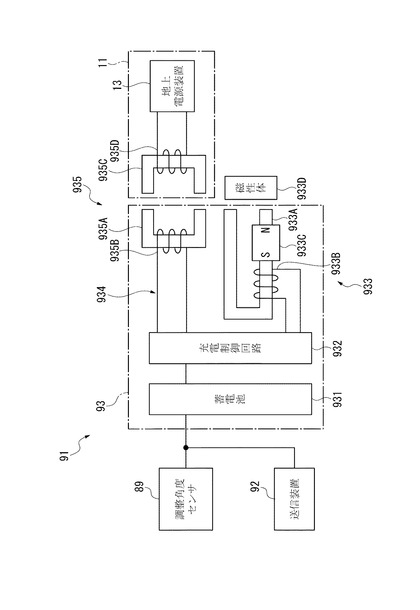
図11において、機上装置91は、前述した調整角度センサ89を含むとともに、調整角度センサ89の検出信号を地上装置11の受信装置12に送信する送信装置92と、これらの送信装置92および調整角度センサ89に電力を供給する機上電源装置93とを備えている。
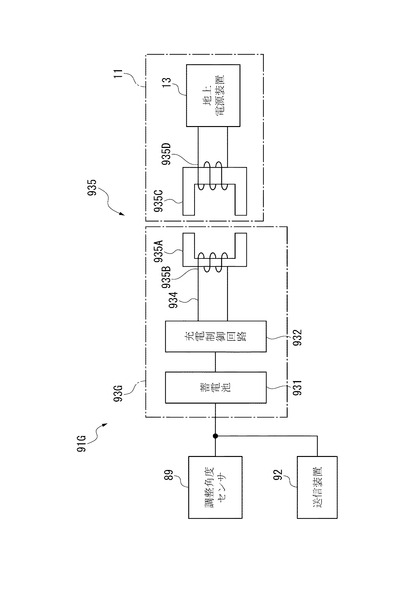
図12において、機上電源装置93は、充電可能な蓄電池931を有するとともに、この蓄電池931に充電する充電器として、充電制御回路932と、この充電制御回路932に充電用の電力を供給する発電機933および電力線934とを備えている。
【0069】
蓄電池931は、市販されている充電式の二次電池を適宜利用することができる。ただし、本実施形態の装入装置1は高炉に用いられてロータ4が高温に曝されるので、高温のもとでも十分な起電力が得られる形式のものを用いることが望ましい。
充電制御回路932は、発電機933および電力線934からの電力を利用して蓄電池931に充電を行うものであり、市販されている充電制御回路等であって、交流を適宜整流したうえで、蓄電池931の形式に適した充電用の電流に調整できるものが望ましい。
【0070】
発電機933は、ロータ4に設置される誘導コイル933Bと、フレーム3に設置されて誘導コイル933Bに対向する磁性体933Dとを有する。誘導コイル933Bにはコア933Aが貫通され、コア933Aは永久磁石933Cにより励磁されており、ロータ4の回転により磁性体933Dが接近し、コア933Aの端部に生じる磁束を通過することで、誘導コイル933Bに起電力を発生させることができる。
【0071】
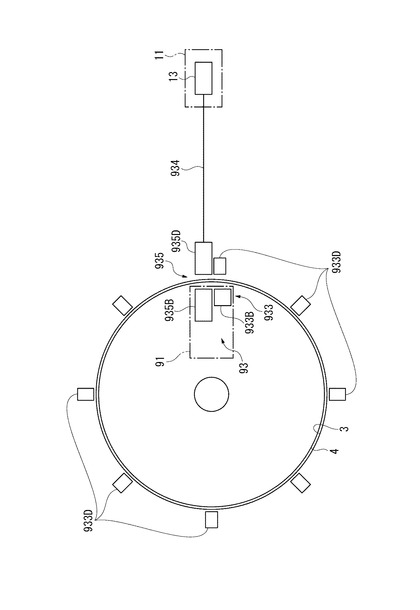
図13および図1〜図3に示すように、誘導コイル933Bは、ロータ4の歯車85が設けられたフランジ状部分の歯車85の裏側に径方向外向きに設置される。磁性体933Dは、強磁性の鉄製ブロック等であり、フレーム3の内部に設置されたデッキ部分の、歯車85に臨む内周辺縁に沿って間欠的に複数が配列されている。このような構成により、ロータ4の回転に伴って誘導コイル933Bが複数の磁性体933Dを順次廻ってそれぞれ近接離隔することで、誘導コイル933Bに起電力を発生させ、充電制御回路932に供給することができる。
【0072】
図12に戻って、電力線934は、地上装置11の地上電源装置13と機上装置91の充電制御回路932とを結ぶ配線であり、フレーム3に対するロータ4の回転を許容するために、途中には非接触式の電磁カップリング935を有する。
電磁カップリング935は、機上装置91側にコア935Aに巻かれた誘導コイル935Bを有し、地上装置11側にコア935Cに巻かれた誘導コイル935Dを有し、誘導コイル935Dに地上電源装置13からの交流を通電されることで、誘導コイル935Bに対応する交流を発生させることができる。
【0073】
図13および図1〜図3に示すように、誘導コイル935Bは、ロータ4の歯車85が設けられたフランジ状部分の歯車85の裏側に、前述した発電機933の誘導コイル933Bと並べて径方向外向きに設置される。誘導コイル935Dは、フレーム3の内部に設置されたデッキ部分の、歯車85に臨む内周辺縁に沿って設置され、前述した磁性体933Dの一つと並べて設置されている。このような構成では、ロータ4の回転角度を調節し、誘導コイル935Bと誘導コイル933Dとが対向する位置で停止させることで、電磁カップリング935が導通状態とされ、地上電源装置13からの交流を充電制御回路932に供給することができる。
【0074】
(本実施形態の効果)
本実施形態によれば、旋回駆動機構7と調整駆動機構8とを協調動作させ、ホルダ5とロータ4とを一体的に同期回転させることで、装入物を旋回散布すること(旋回動作)ができるとともに、ホルダ5とロータ4との相対回転により相対角度を調整することで、旋回軸D1に対するシュート6の傾きを任意に調整することができ、高炉2内における装入物の散布半径を自由に調整すること(調整動作)ができる。
本実施形態においては、旋回動作において、シュート6の傾きを調整する調整動作を行いたい場合、旋回駆動機構7と調整駆動機構8との速度制御により、ロータ4とホルダ5とを同期回転状態から相対回転状態に切り替えることで簡単に行うことができる。
【0075】
そして、本実施形態では、ロータ4、ホルダ5、シュート6に対する前述した傾斜設定(旋回軸D1と調整軸D2との第1角度A1および調整軸D2とシュート中心軸D3との第2角度A2)により、シュート6の傾きを調整するようにしたため、回転方向別の複雑な支持機構などを設ける必要がなく、構成を簡略にすることができる。
さらに、旋回駆動機構7と調整駆動機構8との速度制御で旋回および角度調整が自由に行えるため、制御装置10における制御プログラムの設計により、多様な動作を自由に設定することができる。
【0076】
本実施形態においては、旋回角度センサ79および調整角度センサ89により、旋回駆動機構7および調整駆動機構8の制御に必要となる情報を適切に検出することができる。具体的には、旋回角度センサ79ではシュート6の旋回軸D1を中心とした回転の回転角度が検出できる。調整角度センサ89では、ホルダ5の調整軸D2を中心とした回転の回転角度が検出できる。
これによりシュート6の傾斜角度(角度A1−A2〜角度A1+A2)を読み取ることができ、シュート6の傾斜角度を精度よく制御しながら旋回軸D1を中心にシュート6を旋回させることができる。
【0077】
本実施形態では、調整角度センサ89が旋回部分であるロータ4に設置され、ホルダ5とロータ4との相対回転からシュート6の傾斜角度を直接的に検出することができる。このため、調整角度センサがフレーム3側に設置され、シュート6の傾斜角度を旋回部分の外部から間接的に検出する場合に比べ、検出精度を高めることができるとともに、シュート6からホルダ5、ロータ4、フレーム3に及ぶ複雑な検出機構を必要とせず、装置構造を簡略化することができる。
そして、調整角度センサ89は、ロータ4に設置されてフレーム3に対して常に移動するが、蓄電池931と、充電器である充電制御回路932、発電機933、電力線934とにより、固定側のフレーム3等に対して非接触のまま電力を確実に得ることができる。
【0078】
そして、充電器として発電機933を備えているため、高炉の装入装置1として常時旋回する部分に適用されることで、この旋回動作を利用して定常的に安定した電力が確保できる。
また、充電器として電力線934を備えているため、電磁カップリング935が機能する所定位置で停止させることで、発電機933が発電できない旋回停止状態であっても、地上電源装置13から電力供給を受けて充電器に充電することができる。
これらの発電機933および電力線934は、スリップリングのような摺動式の電気的接続を用いないため、高炉の装入装置1のような塵埃の大量に生じる部分にも使用しても確実な動作が得られる。
【0079】
さらに、本実施形態では、旋回駆動モータ70からロータ4に至る旋回駆動機構7および調整駆動モータ80からホルダ5に至る調整駆動機構8の何れにも差動機構を必要とせず、これらの大きな駆動力が要求される駆動経路の途中に複雑な遊星歯車等を設置しないでよいため、駆動経路中の差動機構に起因する装置の大型化や高コスト化を回避することができる。
また、旋回角度センサ79および調整角度センサ89の周辺等においても、遊星歯車等の差動機構を用いる必要はなく、装置の小型化や低コスト化を図ることができる。
【0080】
〔第2実施形態〕
図14には、本発明の第2実施形態が示されている。
本実施形態は、前述した第1実施形態と同様な構成を備えており、共通の部分については重複する説明を省略し、以下には異なる部分について説明する。
前述した第1実施形態では、機上電源装置93(図12参照)として、蓄電池931を有するとともに、充電器として充電制御回路932、発電機933および電力線934を備えていた。そして、発電機933として、ロータ4にコア933A、誘導コイル933B、永久磁石933Cを設置し、フレーム3に磁性体933Dを配列していた。
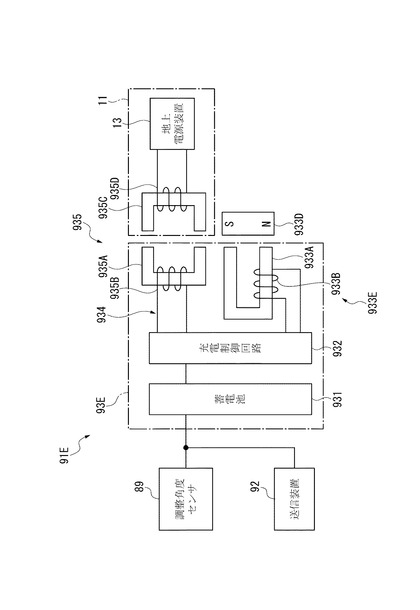
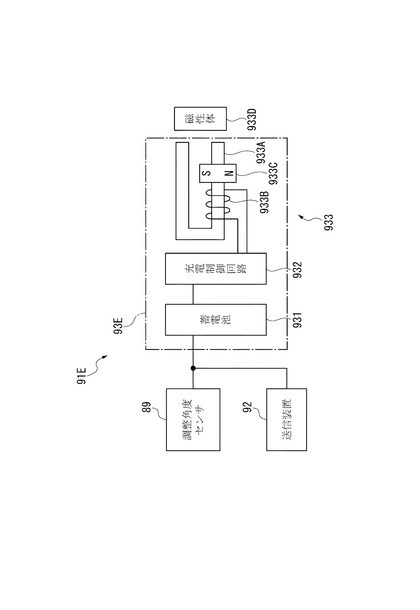
これに対し、本実施形態の機上装置91E(図14参照)において、機上電源装置93Eの発電機933Eでは、ロータ4側の永久磁石933Cが省略され、フレーム3に配列される磁性体933Dとして鉄製ブロックではなく永久磁石が採用されている。
このような本実施形態では、ロータ4が回転した際に、ロータ4側のコア933A、誘導コイル933Bが、ロータ4の回転に伴ってフレーム3側の磁性体933Dに順次近接離隔し、これにより起電力を発生させることができる。
このような本実施形態によっても、前述した第1実施形態と同様な効果を得ることができる。
【0081】
〔第3実施形態〕
図15には、本発明の第3実施形態が示されている。
本実施形態は、前述した第1実施形態と同様な構成を備えており、共通の部分については重複する説明を省略し、以下には異なる部分について説明する。
前述した第1実施形態では、機上電源装置93(図12参照)として、蓄電池931を有するとともに、充電器として充電制御回路932、発電機933および電力線934を備えていた。
これに対し、本実施形態の機上装置91F(図15参照)において、機上電源装置93Fは、電力線934が省略され、発電機933だけで電力供給が行われる構成とされている。発電機933は、前述した第1実施形態と同様な構成である。
このような本実施形態では、ロータ4が回転している間に、発電機933により電力供給を行うことができる。ロータ4が停止している間は発電機933による電力供給は行えず、蓄電池931に充電された電力だけで調整角度センサ89および送信装置92の動作をまかなうことになるため、蓄電池931の容量を大きく確保しておくことが望ましい。
このような本実施形態によっても、電力線934による効果を除き、前述した第1実施形態と同様な効果を得ることができる。
【0082】
〔第4実施形態〕
図16には、本発明の第4実施形態が示されている。
本実施形態は、前述した第1実施形態と同様な構成を備えており、共通の部分については重複する説明を省略し、以下には異なる部分について説明する。
前述した第1実施形態では、機上電源装置93(図12参照)として、蓄電池931を有するとともに、充電器として充電制御回路932、発電機933および電力線934を備えていた。
これに対し、本実施形態の機上装置91G(図16参照)において、機上電源装置93Gは、発電機933が省略され、電力線934だけで電力供給が行われる構成とされている。電力線934は、前述した第1実施形態と同様な構成である。
このような本実施形態では、ロータ4が所定位置で停止している間に、電力線934を介して地上電源装置13から電力供給を行うことができる。ロータ4が回転している間は電力線934による電力供給は行えず、蓄電池931に充電された電力だけで調整角度センサ89および送信装置92の動作をまかなうことになるため、蓄電池931の容量を大きく確保しておくことが望ましい。
このような本実施形態によっても、発電機933による効果を除き、前述した第1実施形態と同様な効果を得ることができる。
【0083】
〔第5実施形態〕
図17には、本発明の第5実施形態が示されている。
本実施形態は、前述した第1実施形態と同様な構成を備えており、共通の部分については重複する説明を省略し、以下には異なる部分について説明する。
本実施形態の装入装置1は、制御装置として同期モードで動作する制御装置10Aを備えたものである。
同期モードとは、シュート傾斜角度(現在のシュート6の旋回軸D1に対する傾斜角度)が所望の角度(シュート傾斜角度リファレンス)からずれている場合(角度偏差(°)が0でない場合)、旋回駆動モータ70と調整駆動モータ80との間に回転速度差を生じさせて、角度偏差を小さくする制御を常時行い、角度偏差を0にすることを目標に調整駆動モータ80を制御することで、旋回駆動モータ70と調整駆動モータ80との間に回転速度差をなくす(旋回駆動モータ70と調整駆動モータ80とを同期させる)フィードバック制御を意味する。
【0084】
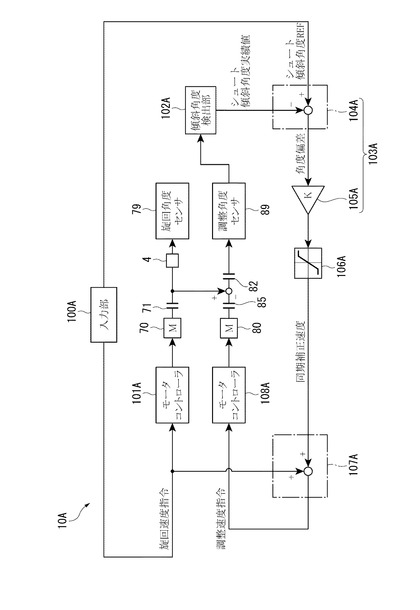
制御装置10Aは、入力部100Aと、第1モータコントローラ101Aと、傾斜角度検出部102Aと、偏差演算手段103Aと、補正速度演算手段としての速度リミッタ106Aと、加算器107Aと、第2モータコントローラ108Aとを備える。
なお、調整角度センサ89、傾斜角度検出部102A、偏差演算手段103A、速度リミッタ106A、加算器107A、第2モータコントローラ108A、調整駆動モータ80は、同期モードでの動作を実現する同期モードループを構成している。
【0085】
第1モータコントローラ101Aには、入力部100Aから、旋回駆動モータ70の回転速度に応じた大きさの旋回速度指令が入力される。そして、第1モータコントローラ101Aは、旋回速度指令に基づく回転速度(指令旋回速度)Gで旋回駆動モータ70を回転させる。
傾斜角度検出部102Aは、調整角度センサ89からの電気的な信号に基づいて、旋回軸D1に対するシュート中心軸D3の傾斜角度をシュート傾斜角度実績値として検出し、このシュート傾斜角度実績値を偏差演算手段103Aへ出力する。
【0086】
偏差演算手段103Aは、減算器104Aと、誤差増幅器105Aとを備える。
減算器104Aには、入力部100Aから、シュート傾斜角度の目標値であるシュート傾斜角度リファレンス(シュート傾斜角度REF)Erが入力され、傾斜角度検出部102Aからシュート傾斜角度実績値が入力される。そして、減算器104Aは、シュート傾斜角度リファレンスからシュート傾斜角度実績値を減じた角度偏差、すなわち、シュート傾斜角度の目標値に対する実績値のずれを演算して、誤差増幅器105Aへ出力する。
誤差増幅器105Aは、減算器104Aから入力される角度偏差に対応する電気信号を増幅して、速度リミッタ106Aへ出力する。具体的に、誤差増幅器105Aは、シュート傾斜角度の角度偏差と、増幅のゲインに対応する値とを乗じて得られる増幅角度偏差(°)に対応する電気信号を出力する。
【0087】
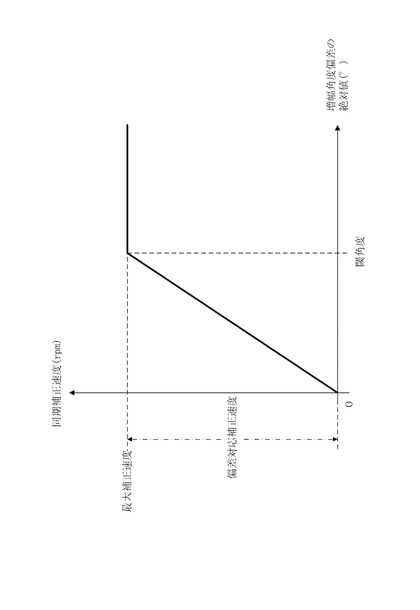
速度リミッタ106Aは、図18に示す関係に基づいて、最大補正速度または偏差対応補正速度を、同期補正速度として、加算器107Aへ出力する。
この同期補正速度は、一般的に制御が乱調しない範囲で大きめの速度に設定され、位置制御誤差が小さくなるような回転速度に対応する。
【0088】
具体的に、速度リミッタ106Aは、増幅角度偏差の絶対値が所定の閾角度以上の場合には、同期補正速度として演算されうる最大の値である最大補正速度を、同期補正速度として出力する。また、増幅角度偏差の絶対値が0よりも大きく、所定の閾角度未満の場合には、増幅角度偏差の大きさに比例する偏差対応補正速度を、同期補正速度として出力する。なお、偏差対応補正速度は、増幅角度偏差が大きくなるにしたがって段階的に大きくなるような速度であってもよい。
なお、増幅角度偏差が正の値の場合には、シュート傾斜角度実績値がシュート傾斜角度リファレンスよりも小さいので、調整駆動モータ80の回転速度を旋回駆動モータ70の回転速度よりも遅くして、シュート傾斜角度を大きくする必要がある。このため、速度リミッタ106Aは、正の同期補正速度を出力する。一方、増幅角度偏差が負の値の場合には、シュート傾斜角度を小さくする必要があるため、負の同期補正速度を出力する。
【0089】
加算器107Aには、入力部100Aから旋回速度指令が入力されるとともに、速度リミッタ106Aから同期補正速度が入力される。そして、加算器107Aは、旋回速度指令の指令旋回速度と同期補正速度とを加えて得られる回転速度(指令調整速度)Gbを、調整速度指令として、第2モータコントローラ108Aへ出力する。このとき、指令調整速度は、同期補正速度が負の値の場合には、指令旋回速度よりも遅くなり、同期補正速度が正の値の場合には、指令旋回速度よりも速くなる。
第2モータコントローラ108Aは、第2加算器107Aからの調整速度指令に基づいて、指令調整速度で調整駆動モータ80を回転させる。
【0090】
以上のような構成により、制御装置10Aは、以下のように動作する。
シュート傾斜角度実績値とシュート傾斜角度リファレンスが異なる場合、制御装置10Aの減算器104Aで演算される角度偏差は、0以外の値となる。このため、同期補正速度として出力される、正または負の最大補正速度、偏差対応補正速度も、0以外の値となる。そして、指令調整速度は、指令旋回速度よりも速く、または、遅くなり、旋回駆動モータ70の回転速度は変化せずに、調整駆動モータ80の回転速度のみが変化する。
その結果、各モータ70,80は、異なる回転速度で回転し、シュート傾斜角度がシュート傾斜角度リファレンスに近づくように、すなわち角度偏差が0に近づくように調整される。
そして、この調整の結果、シュート傾斜角度実績値がシュート傾斜角度リファレンスと等しくならない場合には、このシュート傾斜角度実績値に基づいて、再度、調整駆動モータ80を指令旋回速度と異なる指令調整速度で回転させてシュート傾斜角度を調整する。
一方、シュート傾斜角度実績値がシュート傾斜角度リファレンスと等しくなった場合には、角度偏差が0になるため、指令調整速度と指令旋回速度とが等しくなる。その結果、旋回駆動モータ70と調整駆動モータ80は、同期する。
【0091】
このような本実施形態によれば、制御装置10Aは、シュート傾斜角度実績値とシュート傾斜角度リファレンスに基づき演算される増幅角度偏差を従前よりも小さくするような同期補正速度を演算し、この同期補正速度と指令旋回速度とを加算した指令調整速度で調整駆動モータ80を回転させる。このため、シュート6を精度よく所望のシュート傾斜角度に制御できる。
特に、同期補正速度を指令旋回速度に加算するだけの簡単な演算で指令調整速度を設定できるので、制御装置10Aを安価に構成できる。
また、制御装置10Aは、図18に示す関係に基づいて、増幅角度偏差の絶対値が所定の閾角度以上の場合には、最大補正速度を同期補正速度として出力するので、指令旋回速度を所定速度以下に設定することができ、調整駆動モータ80の負荷を抑制できる。また、所定の閾角度未満の場合には、偏差対応補正速度を同期補正速度として出力するので、回転速度の変更で角度偏差をほぼ0にすることができる。
そして、偏差演算手段103Aは、減算器104Aで得られた角度偏差を、誤差増幅器105Aで増幅して速度リミッタ106Aに出力する。このため、角度偏差の検出感度を高めることができ、精度よく所望のシュート傾斜角度に制御できる。
【0092】
〔第6実施形態〕
図19には、本発明の第6実施形態が示されている。
本実施形態は、前述した第5実施形態と基本構成が同じであり、共通の部分については重複する説明を省略し、以下には異なる部分について説明する。
制御装置10Bは、第5実施形態と同様の同期モードで動作するとともに、位置決めモードと、手動モードとで動作する。
【0093】
位置決めモードとは、同期モードと同様に、角度偏差が0でない場合、調整駆動モータ80の回転速度を変化させて、角度偏差を小さくする制御を行い、角度偏差が0になった後には旋回駆動モータ70と調整駆動モータ80とを同期させるフィードバック制御を意味する。
また、位置決めモードは、同期モードよりも角度偏差を0にするまでの時間を短くできるという特徴を有している。具体的に、同期モードでは、角度偏差が小さくなってくると、同期補正速度として演算される偏差対応補正速度も小さくなるため、角度偏差が0になるまでの時間が長くなる。そこで、位置決めモードでは、角度偏差が小さい場合でもある程度の大きさの補正速度を調整駆動モータ80に与えることで、角度偏差が0になるまでの時間を短くしている。
手動モードとは、同期モードや位置決めモードのようなフィードバック制御ではなく、作業者の設定入力に基づく所望のシュート傾斜角度となるように、調整駆動モータ80の回転速度を1回だけ変化させる制御を意味する。
【0094】
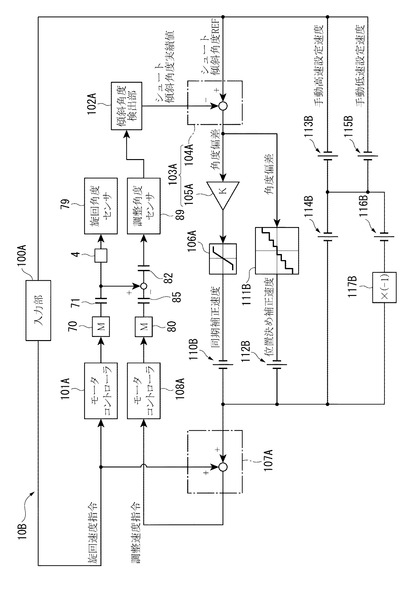
これらの各モードを切り替えるために、制御装置10Bは、第5実施形態の制御装置10Aに設けられた各構成101A〜108Aと、第1スイッチとしての同期モードスイッチ110Bと、多段速位置決め器111Bと、第2スイッチとしての位置決めモードスイッチ112Bと、手動高速スイッチ113Bと、手動正転スイッチ114Bと、手動低速スイッチ115Bと、手動逆転スイッチ116Bと、乗算器117Bとを備える。
同期モードスイッチ110Bは、速度リミッタ106Aと加算器107Aとの間に設けられている。この同期モードスイッチ110Bがオンとなるとともに、各スイッチ112B〜116Bがオフになると、調整角度センサ89、傾斜角度検出部102A、減算器104A、誤差増幅器105A、速度リミッタ106A、加算器107A、第2モータコントローラ108A、調整駆動モータ80から構成される同期モードループが有効となり、同期モードでの制御可能となる。
【0095】
多段速位置決め器111Bは、減算器104Aおよび誤差増幅器105Aの接続点と、加算器107Aおよび同期モードスイッチ110Bの接続点との間に設けられている。この多段速位置決め器111Bは、図20に示す関係に基づいて、高速補正速度、中速補正速度、低速補正速度のうちのいずれか1つを演算して、位置決め補正速度として、加算器107Aへ出力する。
この位置決め補正速度としては、角度偏差が位置決め完了角度以上の場合には、角度偏差の大きさに応じて、高速補正速度、中速補正速度、低速補正速度のいずれかが選択され、位置決め完了角度未満の場合には、0が選択されて位置決め動作が完了する。
【0096】
具体的に、多段速位置決め器111Bは、角度偏差の絶対値が高速閾角度以上の場合には、位置決め補正速度として演算されうる最大の値である高速補正速度を、位置決め補正速度として出力する。
また、角度偏差の絶対値が、高速閾角度未満かつ中速閾角度以上の場合には中速補正速度を、中速閾角度未満かつ位置決め完了角度以上の場合には低速補正速度を、位置決め補正速度として出力する。
なお、多段速位置決め器111Bは、角度偏差が正の値の場合には、シュート傾斜角度を大きくする必要があるため、正の位置決め補正速度を出力する。一方、角度偏差が負の値の場合には、シュート傾斜角度を小さくする必要があるため、負の位置決め補正速度を出力する。
【0097】
位置決めモードスイッチ112Bは、加算器107Aおよび同期モードスイッチ110Bの接続点と、多段速位置決め器111Bとの間に設けられている。この位置決めモードスイッチ112Bがオンとなるとともに、各スイッチ110B,113B〜116Bがオフになると、調整角度センサ89、傾斜角度検出部102A、減算器104A、多段速位置決め器111B、加算器107A、第2モータコントローラ108A、調整駆動モータ80から構成される制御ループ(位置決めモードループ)が有効となり、位置決めモードでの制御可能となる。
手動高速スイッチ113Bおよび手動正転スイッチ114Bは、同期モードスイッチ110Bおよび位置決めモードスイッチ112Bの接続点と、手動高速設定速度を入力可能な入力部100Aとの間に設けられている。手動高速スイッチ113Bは、手動正転スイッチ114Bよりも入力部100A側に設けられている。
【0098】
手動低速スイッチ115B、手動逆転スイッチ116B、および、乗算器117Bは、位置決めモードスイッチ112Bおよび手動正転スイッチ114Bの接続点と、手動低速設定速度を入力可能な入力部100Aとの間に設けられている。手動低速スイッチ115Bは、手動逆転スイッチ116Bよりも入力部100A側に設けられている。また、手動逆転スイッチ116Bは、乗算器117Bよりも手動低速スイッチ115B側に設けられている。さらに、手動高速スイッチ113Bおよび手動正転スイッチ114Bと、手動低速スイッチ115Bおよび手動逆転スイッチ116Bとは、電気的に接続されている。
なお、手動高速設定速度は、手動低速設定速度よりも速く設定される。また、手動高速設定速度および手動低速設定速度は、いずれも正の値として設定される。
【0099】
乗算器117Bは、正の値として入力される手動高速設定速度や手動低速設定速度に「−1」を乗じることで、負の手動高速設定速度や手動低速設定速度を求め、この求めた速度を加算器107Aに出力する。
そして、同期モードスイッチ110Bと位置決めモードスイッチ112Bとがオフの場合における、各スイッチ113B〜116Bのオンオフ状態と手動モードとの関係は、表1に示すようになる。
【0100】
【表1】

【0101】
ここで、高速正転モードおよび低速正転モードとは、調整駆動モータ80の回転速度を速くすることで、シュート傾斜角度を小さくするモードである。高速逆転モードおよび低速逆転モードとは、調整駆動モータ80の回転速度を遅くすることで、シュート傾斜角度を大きくするモードである。
高速正転モードおよび高速逆転モードは、短時間でシュート傾斜角度を変化させたい場合に利用される。また、低速正転モードおよび低速逆転モードは、調整駆動モータ80の負荷を低減するために、多少の時間をかけてシュート傾斜角度を変化させたい場合に利用される。
【0102】
以上のような構成により、制御装置10Bは、以下のように動作する。
なお、同期モードでの動作は、第5実施形態と同じなので説明を省略する。
(位置決めモードでの動作)
シュート傾斜角度実績値とシュート傾斜角度リファレンスが異なり、かつ、制御装置10Bの減算器104Aで演算される角度偏差が位置決め完了角度以上の場合、位置決め補正速度として、角度偏差量に応じて、正または負の高速補正速度、中速補正速度、低速補正速度が選択される。そして、指令調整速度は、指令旋回速度よりも速く、または、遅くなり、調整駆動モータ80の回転速度のみが変化する。
その結果、各モータ70,80は、異なる回転速度で回転し、角度偏差が0に近づくようにシュート6の傾きが調整される。
また、角度偏差が位置決め完了角度未満となった場合には、位置決めモードスイッチ112Bをオフにするとともに、同期モードスイッチ110Bをオンにして、同期モードでの制御を行う。
一方、シュート傾斜角度実績値がシュート傾斜角度リファレンスと等しくなった場合には、角度偏差が0になるため、指令調整速度と指令旋回速度とが等しくなり、旋回駆動モータ70と調整駆動モータ80は、同期する。
【0103】
(手動モードでの動作)
この場合、制御装置10Bの加算器107Aには、正または負の手動高速設定速度あるいは手動低速設定速度が入力される。加算器107Aは、この入力された設定速度と、旋回速度指令の指令旋回速度とを加えて得られる指令調整速度を、調整速度指令として、第2モータコントローラ108Aへ出力する。そして、第2モータコントローラ108Aの制御により、調整駆動モータ80の回転速度が所定時間だけ変化して、シュート傾斜角度が変化する。
この変化後のシュート傾斜角度は、シュート傾斜角度実績値として傾斜角度検出部102Aで検出され、新しいシュート傾斜角度リファレンスとして設定される。
【0104】
このような本実施形態によれば、制御装置10Bは、高速補正速度、中速補正速度、低速補正速度を位置決め補正速度として演算する位置決めモードで動作するので、同期モードよりも角度偏差を0にするまでの時間を短くできる。
また、制御装置10Bは、手動モードでも動作するので、シュート傾斜角度を大きく変化させたい場合には、迅速に対応できる。
【0105】
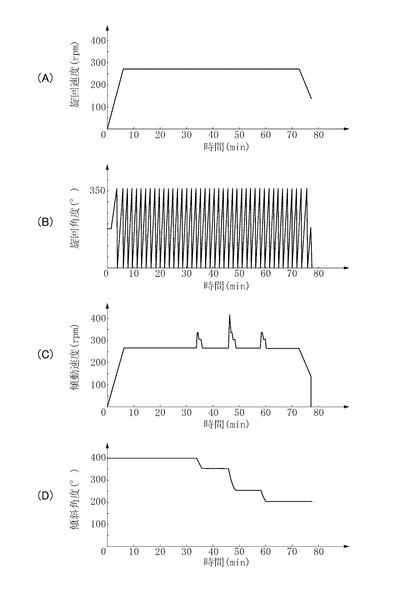
本実施形態の制御装置における制御状態の具体例について説明する。
図21は、第6実施形態の制御装置における制御状態を表すタイムチャートであり、(A)は旋回駆動モータ70の旋回速度、(B)はシュート6の旋回角度、(C)は調整駆動モータ80の調整速度、(D)はシュート6の傾斜角度を示す。なお、図23(B)において、旋回角度が0°のときと360°のときには、シュート6は同じ場所に位置している。
本具体例では各種パラメータを以下の通り設定した。
・高速補正速度 :150rpm
・中速補正速度 : 70rpm
・低速補正速度 : 40rpm
・初期の傾斜角度: 40°
そして、以下の表2に示す状態でシュート傾斜角度の制御を行った。なお、表2中の経過時間は、おおよその時間を表している。
【0106】
【表2】
【0107】
その結果、図21に示すように、制御装置10Bにおける同期モードおよび位置決めモードの切り替えにより、シュート傾斜角度を精度よく所望の角度に変更できることが確認できた。
【0108】
〔第7実施形態〕
図22および図23には、本発明の第7実施形態が示されている。
前述した第1実施形態ないし第6実施形態は、それぞれ旋回部分としてロータ4、ホルダ5およびシュート6を設け、シュート6の傾斜角度を調整するための調整機構として、ロータ4とホルダ5とを傾斜面に対して相対回転させることでシュート6の傾斜角度を調整する方式であったが、本発明は前述した特許文献1に記載された調整機構、すなわちシュート6を水平な回動軸で支持し、歯車で伝達される回転により傾斜角度を調整するものである。
【0109】
図22および図23において、フレーム3および供給管33は前述した第1実施形態と同様であり、供給管33は図示省略した構成を介して歯車71と一体に旋回可能である。
供給管33の下端には円盤状のプレート33Aが固定されるとともに、その上面側には供給管33を直径方向に貫通する回動軸6Aが配置され、シュート6は基端部をこの回動軸6Aに固定されて傾斜角度が調整可能である。
回動軸6Aの端部には扇形の部分歯車6Bが固定され、この部分歯車6Bには歯車6Cが噛み合わせられ、この歯車6Cにはウォーム歯車6Eが噛み合わせられている。ウォーム歯車6Eは供給管33に回転自在に支持されるとともに、ウォーム歯車6Eには歯車6Fが固定され、この歯車6Fは歯車85に噛み合わせられている。
【0110】
歯車71には、前記第1実施形態と同様な旋回駆動機構7が接続されており、旋回駆動モータ70の駆動力により歯車71および供給管33が旋回駆動され、これによりシュート6が旋回する。
歯車85には、前記第1実施形態と同様な調整駆動機構8が接続されており、調整駆動モータ80の駆動力により歯車85が回転駆動され、歯車71との相対回転がウォーム歯車6Eに取り出され、回動軸6Aの回動として伝達され、シュート6の傾斜が変更される。
旋回駆動機構7の回転を検出するために、歯車71の外周に沿って旋回角度センサ79が設置されている。この旋回角度センサ79はフレーム3に支持されている。
調整駆動機構8の回転を検出するために、回動軸6Aの端部には調整角度センサ89が設置されている。
【0111】
プレート33Aの上面には機上装置91が設置され、その内部には機上電源装置93が設置されている。プレート33Aの下面には機上電源装置93の誘導コイル933B,935Bが設置され、対向するフレーム3の部分には磁性体933Dおよび誘導コイル935Dが配列されている。
これらの機上装置91、機上電源装置93、誘導コイル933B,935B、935Dおよび磁性体933Dは、それぞれ前記第1実施形態と同様なものである。
【0112】
このような本実施形態においても、旋回駆動機構7および調整駆動機構8の同期回転動作によりシュート6の旋回が行われるとともに、旋回駆動機構7と調整駆動機構8との相対回転によりシュート6の傾斜角度の調整が行われ、この点で前述した第1実施形態と共通である。
また、本実施形態においても、旋回角度センサ79および調整角度センサ89により、旋回駆動機構7および調整駆動機構8の制御に必要となる状態量を適切に検出することができる。特に、本実施形態では、旋回部分に設置された調整角度センサ89により、シュート6の傾斜角度を直接検出することができる。
さらに、前記第1実施形態と同様に、機上装置91および地上装置11により、調整角度センサ89を旋回部分であるプレート33Aに設置しつつ、調整角度センサ89からの信号を地上の制御装置10に接続し、あるいは調整角度センサ89の電源を供給することができる。
【0113】
〔変形例〕
なお、本発明は前記各実施形態に限定されるものではなく、具体的な各部構成などは実施にあたって適宜変形することができる。
前述した各実施形態では、図1あるいは図4に示すように、旋回駆動モータ70および調整駆動モータ80を隣接して設置したが、旋回駆動モータ70および調整駆動モータ80を離して設置してもよい。
また、ホルダ側傘歯歯車81を外歯歯車とし、伝達側傘歯歯車82を内歯歯車としたが、これらの他の歯車であってもよい。
例えば、ホルダ側傘歯歯車81を内歯歯車、伝達側傘歯歯車82を外歯歯車としてもよく、このような構成でも、前述した図1の実施形態と同様な効果を得ることができる。
【0114】
また、前述した第5,第6実施形態において、誤差増幅器105Aを設けずに、減算器104Aで演算された角度偏差を、直接、速度リミッタ106Aに入力し、速度リミッタ106Aにおいて、角度偏差に基づいて、同期補正速度を演算してもよい。
さらに、前述した第5,第6実施形態において、誤差増幅器105Aとして、ゲインを変更できるような増幅器を設けてもよい。
【0115】
その他、前述した各実施形態の細部構成などは適宜変更してよく、前述した傾斜設定(旋回軸D1と調整軸D2との第1角度A1および調整軸D2とシュート中心軸D3との第2角度A2)が得られる構成であれば本発明に適宜利用することができる。
【産業上の利用可能性】
【0116】
本発明は、装入装置およびその制御方法に関し、高炉などの容器内部に装入物を装入する装置として利用できる。
【符号の説明】
【0117】
1…装入装置
2…高炉
3…フレーム
4…旋回部分および調整機構であるロータ
5…旋回部分および調整機構であるホルダ
6…旋回部分であるシュート
7…旋回駆動機構
8…調整駆動機構
10,10A,10B…制御装置
11…地上装置
12…受信装置
13…地上電源装置
70…旋回駆動モータ
79…旋回角度センサ
80…調整駆動モータ
89…調整角度センサ
91,91E,91F,91G…機上装置
92…送信装置
93,93E,93F,93G…機上電源装置
931…蓄電池
932…充電器である充電制御回路
933…発電機
933B…誘導コイル
933D…磁性体
934…電力線
935…電磁カップリング
935B,935D…誘導コイル
100A…入力部
101A…第1モータコントローラ
102A…傾斜角度検出部
103A…偏差演算手段
106A…補正速度演算手段としての速度リミッタ
107A…加算器
108A…第2モータコントローラ
110B…第1スイッチとしての同期モードスイッチ
112B…第2スイッチとしての位置決めモードスイッチ
A1…第1角度
A2…第2角度
A3…第3角度
D1…旋回軸
D2…調整軸
D3…シュート中心軸
【技術分野】
【0001】
本発明は、装入装置およびその制御方法に関し、高炉などの容器内部に装入物を装入する装置に関する。
【背景技術】
【0002】
従来、製銑用の高炉においては、炉内に装入物を装入する設備として装入装置が用いられている。同様な装入装置は、他の反応炉や反応塔、触媒容器など、容器内部に内容物を充填する際にも用いられている。
このような装入装置においては、容器内における装入物の平面分布を均一にする等、装入物を所望の状態とすることが要求される。このために、装入装置においては、装入物の散布方向や散布状態を自由に制御することが求められ、様々な散布機構が開発されている。
【0003】
特許文献1の装置は、装入物を送り出す円筒状または樋状のシュートを旋回部分に傾斜して設置し、この旋回部分をシュートとともに鉛直な旋回軸まわりに旋回させることで、シュートの先端から放出される装入物をドーナツ状に散布する。さらに、旋回軸に対するシュートの傾斜角度を調整することで、シュートから放出される装入物の到達領域を変更し、これにより散布状態の制御を実現している。
【0004】
特許文献1の装置では、シュートは傾斜角度の調整機構を介して旋回部分に支持されている。旋回部分を旋回駆動するために旋回駆動モータが用いられ、旋回駆動モータの出力は調整機構にも伝達されている。調整機構と旋回駆動モータとの間には差動機構(遊星歯車)が介在され、差動機構の3つめの軸には調整駆動モータが接続されている。このような構成において、中間歯車の減速比を正しく選択すれば、旋回駆動モータにより調整機構と旋回部分とが一体に回転するようにできる。また、調整駆動モータを作動させることで、差動機構から旋回動作に対する相対回転(相対角度、位相差の変化)が調整機構に伝達され、調整機構においては伝達された相対回転に応じてシュートの傾斜角度の調整動作が行われる。
【0005】
前述した特許文献1では、シュートの傾斜角度の調整機構と旋回部分を旋回駆動モータの駆動により一体的に旋回させ、調整駆動モータの駆動により調整機構を駆動させるために、差動機構を介在させている。このような差動機構があると、装置としての構造が複雑化し、設備コストも上昇する。さらに、複雑な機構の旋回を維持するために保守点検が煩雑になる。
【0006】
これに対し、本願の出願人により、シュートの旋回軸まわりに回転するロータと、旋回機構に支持されて旋回軸に対して傾斜した調整軸まわりに回転するホルダとを設置し、このホルダにシュートを支持した構成が提案されている(特許文献2参照)。
特許文献2では、通常はこれらのロータおよびホルダを同期回転させることでシュートを一定の傾斜角度で旋回させるとともに、ロータに対してホルダを相対回転させることにより、シュートの傾斜角度を調整することができる。
【0007】
このような構成の駆動には、特許文献1と同様に、差動機構と旋回駆動モータおよび調整駆動モータとを用い、通常は旋回駆動モータだけでロータとホルダとを同期回転させ、シュート角度の調整時には調整駆動モータと差動機構とによりロータとホルダとを相対回転させる(特許文献2の段落0048〜0049および図16参照)。
また、ロータおよびホルダに対して個別の駆動モータを用い、各々の回転を個別に制御することで、差動機構を用いずに旋回動作および傾斜角度調整を行うことができる。つまり、ロータおよびホルダを同期回転させることで、シュートを現状角度のまま旋回動作させることができ、あるいはロータとホルダとを相対回転させることでシュートの傾斜角度調整を行うことができる(特許文献2の段落0038および図1、段落0047および図15参照)。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開昭49−41205号公報
【特許文献2】国際公開第2011/043454号
【発明の概要】
【発明が解決しようとする課題】
【0009】
ところで、前述したロータおよびホルダを有する構成において、例示した二つの駆動方式には次のような問題がある。
前述した駆動系統に差動機構を用いる方式では、駆動力の伝達に耐えられる大型の差動機構が必要になり、装入装置としての軽量化、小型化に適さないという問題がある。
前述した個別の駆動モータを用いる方式では、個々の駆動モータの回転速度および位相により旋回軸に対するシュートの傾斜角度を制御する。この際、旋回軸に対するシュートの傾斜角度は、各駆動モータの回転角度から演算が可能であるが、停電後の復旧など初期位置を設定する必要があり、ロータに設置した角度センサによりホルダおよびシュートの角度を実測することが求められる。
しかし、ロータは固定側のフレーム等に対して旋回するものであるため、角度センサの検出信号の配線あるいは検出回路用の電源配線などの処理が難しいという問題があった。
【0010】
本発明の主な目的は、駆動系統および検出機構の構造を簡略化しつつシュート角度調整を含む動作制御を適切に行える装入装置およびその制御方法を提供することである。
【課題を解決するための手段】
【0011】
本発明の装入装置は、フレームに支持されて旋回軸を中心に回転自在な旋回部分と、前記旋回部分に支持されたシュートと、前記旋回部分に対する回転角度に応じて前記シュートの傾斜角度を変化させる調整機構と、前記旋回部分を回転させる旋回駆動モータと、前記調整機構を回転させる調整駆動モータとを有するとともに、前記旋回部分に、前記シュートの傾斜角度を検出する調整角度センサと、前記調整角度センサに電力を供給する蓄電池と、前記蓄電池に充電する充電器とを有することを特徴とする。
【0012】
本発明において、前記充電器は、前記旋回部分の外周に設置された誘導コイルと、前記フレームに設置されて前記誘導コイルに対向する磁性体とを有し、前記旋回部分の回転により前記誘導コイルに発生する起電力で前記蓄電池を充電する発電機を備えるものが利用できる。
本発明において、前記充電器は、一方が前記旋回部分の外周に設置されかつ他方が前記フレームに設置された電磁カップリングを有し、前記電磁カップリングを介して外部から供給される電力で前記蓄電池を充電する電力線を備えるものでもよい。
さらに、本発明では、これらの発電機および電力線を両方備えたものとしてもよい。
【0013】
このような本発明においては、調整角度センサが旋回部分に設置され、シュートの傾斜角度を直接的に検出することができる。このため、調整角度センサがフレーム側に設置され、シュートの傾斜角度を旋回部分の外部から間接的に検出する場合に比べ、検出精度を高めることができるとともに、検出機構の構造を簡略化することができる。
そして、調整角度センサは、旋回部分に設置されてフレームに対して常に移動するが、本発明に基づく蓄電池および充電器により、固定側のフレーム等に対して非接触のまま電力を確実に得ることができる。
【0014】
本発明において、充電器として発電機を採用するならば、高炉の装入装置など常時旋回する部分に適用された際には定常的に安定した電力が確保できる。
また、充電器として電力線を採用するならば、所定位置で停止した状態で電力供給を受けて充電器に充電することができる。このような電力線では、旋回状態では電力供給が受けられないが、機器構成を簡略化することができる。
これらの発電機および電力線は、スリップリングのような摺動式の電気的接続を用いないため、高炉の装入装置のような塵埃の大量に生じる部分にも使用しても確実な動作が得られる。
【0015】
本発明において、調整角度センサとしては、旋回部分に対するシュートの傾斜角度を直接検出するもの、調整機構における回転動作等を検出してシュートの傾斜角度を演算するもの等が利用できる。このような調整角度センサにより、シュートの傾斜角度を検出し、調整機構に所望の調整動作を行わせるべく旋回駆動モータと協調するように、調整駆動モータを制御することができる。
本発明において、旋回部分の旋回軸まわりの角度位置を検出するために、旋回角度センサを設置することが望ましい。旋回角度センサとしては、フレームに対する旋回部分の回転を直接検出するもの、旋回駆動モータの回転を検出するもの、あるいは制御装置から旋回駆動モータの動作情報を取得して旋回角度を演算するもの等が利用できる。このような旋回角度センサにより、シュートおよび旋回部分の旋回状態を検出し、旋回部分に所望の旋回動作を行わせるべく、旋回駆動モータを制御することができる。
【0016】
本発明の装入装置では、旋回部分および調整機構に対して個別に駆動モータが設置されており、旋回部分を旋回駆動モータにより駆動し、調整機構を調整駆動モータにより駆動することで、所期の旋回動作および調整動作を実行することができる。
この際、旋回部分の旋回角度を旋回角度センサ等により検出しつつ、前述した調整角度センサによりシュートの傾斜角度を検出することで、所期の旋回動作および調整動作となるように個々の駆動モータを制御する。
すなわち、旋回駆動モータによる旋回部分の回転と調整駆動モータによる調整機構の旋回軸を中心とした回転とが同じ回転速度である時(相対回転が0の時)、旋回部分と調整機構とは同期して回転され、シュートを含めて一体に旋回する。この状態では、調整機構における旋回部分に対する相対回転が0であるため、シュートの傾斜角度は変化しない(通常の旋回動作)。
【0017】
一方、旋回駆動モータによる旋回部分の回転速度と調整駆動モータによる調整機構の旋回軸を中心とした回転速度との同期を解除し、互いに異なる回転速度にすると、調整機構においては旋回部分に対する相対回転に応じてシュートの傾斜角度が変化する。すなわち、旋回駆動モータを停止させて調整駆動モータだけ作動させることで、基本的な旋回動作は停止され、シュートの傾斜角度が調整される。あるいは、旋回駆動モータと調整駆動モータとを異なる速度で回転させることで、シュートおよび旋回部分の旋回を行いつつ、相対回転に応じて傾斜角度が調整される(傾斜角度の調整動作)。
従って、本発明では、旋回駆動モータから旋回部分に至る駆動経路および調整駆動モータから調整機構に至る駆動経路は何れも差動機構(特許文献1の駆動機構、特許文献2の段落0048〜0049および図16参照)を必要とせず、これらの大きな駆動力が要求される駆動経路の途中に複雑な遊星歯車等を設置しないでよいため、駆動機構を簡略化することができ、駆動経路中の差動機構に起因する装置の大型化や高コスト化を回避することができる。
【0018】
本発明において、旋回動作および調整動作を行うための旋回部分および調整機構としては、前述した特許文献1の構造、つまり、旋回部分にシュートを回動自在に支持し、このシュートの回動軸に扇形歯車を接続し、この扇形歯車を調整駆動モータで駆動する構成を用いてもよい。
ただし、本発明において、旋回部分および調整機構としては、前述した特許文献2と同様なロータおよびホルダを有する構成を採用することが望ましい。
【0019】
本発明の装入装置において、前記フレームに支持されて前記旋回軸を中心に回転可能なロータと、前記ロータに設定されて前記旋回軸に第1角度で交差する調整軸と、前記ロータに支持されて前記調整軸を中心に回転可能なホルダと、前記ホルダに固定されて前記調整軸に第2角度で交差する方向へ延びるシュートと、前記フレームに固定されて前記ロータを前記フレームに対して回転させる旋回駆動モータと、前記フレームに支持されて前記旋回軸を中心に回転可能な伝達側傘歯歯車と、前記ホルダに固定されて前記伝達側傘歯歯車に噛み合うホルダ側傘歯歯車と、前記フレームに固定されて前記伝達側傘歯歯車を回転させることで前記ホルダを前記ロータに対して回転させる調整駆動モータと、を有するとともに、前記調整角度センサは、前記ホルダおよび前記ロータの前記調整軸まわりの相対角度から前記旋回軸に対する前記シュートの傾斜角度を検出するものであり、前記蓄電池および前記充電器は、前記ロータまたは前記ホルダに設置されている構成とすることができる。
【0020】
このような本発明では、フレームにロータが支持され、ロータにホルダが支持され、ホルダにシュートが固定される。旋回駆動モータによりロータを回転させることで、基本的な旋回動作が行われるとともに、調整駆動モータによりホルダをロータに対して回転させることで、シュートの角度を変更できる。
【0021】
すなわち、調整軸は旋回軸に対して第1角度で交差し、シュートは調整軸に対して第2角度で交差するため、ホルダとロータとが相対回転すると、旋回軸に対するシュートの角度は、第1角度と第2角度との差(最小値)から第1角度と第2角度との和(最大値)までの間で変化する。その結果、フレームおよびロータに対するシュートの角度が前述した最大値から最小値までの範囲で任意に選択することができる。
【0022】
ここで、本発明では、ホルダ側傘歯歯車と伝達側傘歯歯車とは、ロータが旋回軸を中心に回転しても常に噛み合っており、旋回軸を中心に伝達側傘歯歯車を回転させることにより、ホルダをロータに対して調整軸を中心に回転させることができる。伝達側傘歯歯車は旋回軸を中心に回転するため、歯車列等の伝達経路を介してフレームに固定された調整駆動モータから駆動力を伝達することができる。
【0023】
本発明では、旋回駆動モータがロータを単独で回転させ、調整駆動モータが伝達側傘歯歯車を単独で回転させ、つまり旋回駆動モータによるロータの駆動と調整駆動モータによる傘歯歯車の駆動とが各々独立している。
このため、通常時は、ロータと伝達側傘歯歯車とを同期回転させることで、シュートの角度が一定の状態でこれらのロータおよびホルダ、シュートを旋回させることができる。一方、調整時には、ロータと伝達側傘歯歯車が異なる回転数で回転するように、調整駆動モータの回転数を制御することで、ロータに対する伝達側傘歯歯車の位相が変更され、ホルダ側傘歯歯車に駆動力が伝達され、ロータに対してホルダが調整軸を中心に回転し、その結果シュートの角度が変更される。
【0024】
このように、本発明においては、旋回駆動モータでシュートを旋回させることにより基本的な散布動作を行うとともに、調整駆動モータによりロータと伝達側傘歯歯車の位相を調整することで、旋回軸に対するシュートの角度、つまりフレームおよびロータに対するホルダおよびシュートの角度を調整することができ、旋回による散布の半径を調整することができる。
【0025】
このような本発明では、基本的な旋回動作を継続しつつ、シュートの角度調整を行うことができるため、制御は非常に簡略化される。さらに、電気的に各駆動モータの差分を検出する方式では、信頼性向上ため、シュート傾斜角度のプリセット用センサをシュートに設けるなどの工夫が必要になるところ、本発明では、このような工夫が不要となる。また、ロータやホルダおよびその支持構造、旋回駆動モータからロータに至る伝達経路については機能的にも単純であり、構造の複雑化を回避することができる。調整駆動モータからホルダに至る伝達経路についても、前述の傘歯歯車を利用した簡単な構成で実現することができ、構造の複雑化を回避することができる。
【0026】
上述のような本発明の装入装置においては、さらに下記のような構成とし、あるいは下記のような制御方法を採用することで、装入動作を高精度に行わせることができる。
【0027】
本発明の装入装置において、前記シュートの傾斜角度を所定の角度とする際に、前記調整角度センサで検出される角度を参照しつつ前記調整駆動モータを制御する制御装置を備え、前記制御装置は、
入力操作に対応する指令を出力可能な入力部と、この入力部から入力される、前記旋回駆動モータに対して設定された回転速度を表す指令に基づいて、前記旋回駆動モータを回転させる第1モータコントローラと、前記入力部から入力される前記所定の角度と前記調整角度センサで検出された前記シュートの傾斜角度との偏差を演算する偏差演算手段と、前記偏差演算手段で演算された偏差に基づいて、前記調整駆動モータの回転速度を変更するための補正速度を演算する補正速度演算手段と、前記入力部からの指令に基づく回転速度と前記補正速度演算手段で演算された補正速度とを加算する加算器と、前記加算器における加算で得られた回転速度で、前記調整駆動モータを回転させる第2モータコントローラと、を備え、前記補正速度演算手段は、前記調整駆動モータの回転速度の変更後に前記偏差演算手段で新たに演算される偏差が、回転速度の変更前に演算された偏差よりも小さくなるような補正速度を演算することが望ましい。
【0028】
本発明の装入装置の制御方法は、前述した本発明の装入装置の制御を行う方法であって、入力操作に対応する指令を出力可能な入力部から入力される、前記旋回駆動モータに対して設定された回転速度を表す指令に基づいて、前記旋回駆動モータを回転させる第1モータコントロール工程と、前記入力部から入力される前記所定の角度と前記調整角度センサで検出された前記シュートの傾斜角度との偏差を演算する偏差演算工程と、前記偏差演算工程で演算された偏差に基づいて、前記調整駆動モータの回転速度を変更するための補正速度を演算する補正速度演算工程と、前記入力部からの指令に基づく回転速度と前記補正速度演算工程で演算された補正速度とを加算する加算工程と、
前記加算工程における加算で得られた回転速度で、前記調整駆動モータを回転させる第2モータコントロール工程と、を備え、前記補正速度演算工程は、前記調整駆動モータの回転速度の変更後に前記偏差演算工程で新たに演算される偏差が、回転速度の変更前に演算された偏差よりも小さくなるような補正速度を演算することが望ましい。
【0029】
このような本発明の装入装置および装入装置の制御方法では、入力部から入力される所定の角度と、調整角度センサで検出されたシュートの傾斜角度との偏差を、調整駆動モータの回転速度変更前よりも小さくするような補正速度を演算し、この補正速度と旋回駆動モータの回転速度とを加算した回転速度で、調整駆動モータを回転させるため、精度よくシュートの傾斜角度を一定の角度に制御できる。また、補正速度を旋回駆動モータの回転速度に加算するだけの簡単な演算で、調整駆動モータの回転速度を決定することができ、安価な構成でも対応できる。
【0030】
本発明の装入装置において、前記補正速度演算手段は、前記偏差演算手段で演算された偏差が予め設定された閾角度以上の場合には、固定された値である最大補正速度を前記補正速度として演算し、前記閾角度未満の場合には、前記偏差の大きさに応じて異なり、かつ、前記最大補正速度未満の値である偏差対応補正速度を前記補正速度として演算することが望ましい。
本発明の装入装置の制御方法において、前記補正速度演算工程では、
前記偏差演算工程で演算された偏差が予め設定された閾角度以上の場合には、固定された値である最大補正速度を前記補正速度として演算し、
前記閾角度未満の場合には、前記偏差の大きさに応じて異なり、かつ、前記最大補正速度未満の値である偏差対応補正速度を前記補正速度として演算することが望ましい。
【0031】
このような本発明の装入装置、および装入装置の制御方法では、偏差の絶対値が閾角度以上の場合には、固定値である最大補正速度を補正速度として演算するので、調整駆動モータの回転速度の最大値を所定速度以下に設定することができ、調整駆動モータの負荷を抑制できる。一方、閾角度未満の場合には、偏差の絶対値の大きさに応じて異なる偏差対応補正速度を補正速度として演算するので、偏差をほぼ0にすることができる。
【0032】
本発明の装入装置において、前記制御装置は、前記加算器と前記偏差演算手段との間に設けられ、前記加算器に前記補正速度を入力可能なオン状態と入力不可能なオフ状態とを切り替え可能な第1スイッチと、前記加算器と前記入力部との間に設けられ、前記加算器に前記入力部からの指令を入力可能なオン状態と入力不可能なオフ状態とを切り替え可能な第2スイッチと、を備え、前記加算器は、
前記第1スイッチによりオフ状態に設定され、かつ、前記第2スイッチによりオン状態に設定された場合、前記入力部からそれぞれ入力される、前記旋回駆動モータに対して設定された回転速度と、前記傾斜角度を変更するための回転速度とを加算して、その結果を前記第2モータコントローラに出力し、前記第1スイッチによりオン状態に設定され、かつ、前記第2スイッチによりオフ状態に設定された場合、前記入力部から入力される前記旋回駆動モータに対して設定された回転速度と、前記補正速度演算手段で演算された補正速度とを加算して、その結果を前記第2モータコントローラに出力することが望ましい。
【0033】
このような本発明では、第1スイッチによりオフ状態に設定し、第2スイッチによりオン状態に設定することにより、シュートの傾斜角度を作業者の所望の傾斜角度に短時間で変更することができる。さらに、第1スイッチによりオン状態に設定し、第2スイッチによりオフ状態に設定した場合には、シュートの傾斜角度をほぼ一定の角度に制御できる。
【図面の簡単な説明】
【0034】
【図1】本発明の第1実施形態を示す部分破断した斜視図。
【図2】前記図1のA−A断面を示す縦断面図。
【図3】前記図1のB−B断面を示す縦断面図。
【図4】前記第1実施形態の駆動系を示す斜視図。
【図5】前記第1実施形態の最大散布角での旋回動作を示す平面図。
【図6】前記第1実施形態の最大散布角での旋回動作を示す側面図。
【図7】前記第1実施形態の中間的な散布角での旋回動作を示す平面図。
【図8】前記第1実施形態の中間的な散布角での旋回動作を示す側面図。
【図9】前記第1実施形態の最小散布角での旋回動作を示す平面図。
【図10】前記第1実施形態の最小散布角での旋回動作を示す側面図。
【図11】前記第1実施形態の電源装置および制御装置を示すブロック図。
【図12】前記第1実施形態の電源装置を示すブロック図。
【図13】前記第1実施形態の発電機および電力線を示す模式平面図。
【図14】本発明の第2実施形態の電源装置を示すブロック図。
【図15】本発明の第3実施形態の電源装置を示すブロック図。
【図16】本発明の第4実施形態の電源装置を示すブロック図。
【図17】本発明の第5実施形態の制御装置を示すブロック図。
【図18】前記第5実施形態の同期補正速度と増幅角度偏差との関係を示すグラフ。
【図19】本発明の第6実施形態の制御装置を示すブロック図。
【図20】前記第6実施形態の位置決め補正速度と角度偏差との関係を示すグラフ。
【図21】前記第6実施例の制御装置における制御状態を表すタイムチャート。
【図22】本発明の第7実施形態を示す斜視図。
【図23】前記第7実施形態の電源装置および制御装置を示すブロック図。
【発明を実施するための形態】
【0035】
以下、本発明の実施形態を図面に基づいて説明する。
〔第1実施形態〕
図1から図13には本発明の第1実施形態が示されている。
このうち、図1から図4は、本実施形態の装入装置1の基本構造を示し、図1は本実施形態の装入装置1を示す部分破断した斜視図、図2は図1のA−A断面(後述する旋回駆動モータ70を通る断面)を示す縦断面図、図3は図1のB−B断面(後述する調整駆動モータ80を通る断面)を示す縦断面図、図4は本実施形態の駆動系を示す斜視図である。図5から図10は、本実施形態の装入装置1の動作を示し、図5、図7、図9は異なるシュート角度での旋回動作を示す平面図であり、図6、図8、図10はシュート角度の調整動作を示す側面図である。図11から図13は、本実施形態の装入装置1における電源装置および制御装置の構成を示す。
【0036】
(基本構造)
本実施形態の装入装置1は、高炉2の炉頂部に設置されて炉内に鉄鉱石および石炭を主体とする装入物を散布するものである。
高炉2の炉頂部は円錐台状に形成され、その上部開口にはフレーム3が設置されている。フレーム3には旋回部分としてのロータ4が支持され、ロータ4には調整機構としてのホルダ5が支持され、ホルダ5にはシュート6が支持されている。
【0037】
本実施形態の装入装置1においては、旋回軸D1、調整軸D2、シュート中心軸D3が設定され、前述したフレーム3、ロータ4、ホルダ5およびシュート6はこれらの各軸に従って設置される(図2および図3参照)。
旋回軸D1は、鉛直方向の軸線であり、高炉2の中心軸線と一致する。
調整軸D2は、交点Oにおいて旋回軸D1と交差しており、互いの交差角度は第1角度A1とされている。
シュート中心軸D3は、前述した交点Oにおいて調整軸D2と交差しており、互いの交差角度は第2角度A2とされている。
【0038】
シュート中心軸D3は、シュート6から散布される装入物が炉内に散布される方向を規定するものであり、通常はシュート6の円錐台形状の底面方向とされる。
【0039】
詳細は後述するが、ホルダ5はロータ4に対して調整軸D2まわりに回転する。このようなロータ4に対するホルダ5の回転に伴い、シュート中心軸D3は調整軸D2に対する第2角度A2を保ったまま調整軸D2まわりに回転する。この回転により、シュート6の先端開口における点Pは、軌跡L2に沿って円形に移動する。
【0040】
このような回転により、シュート中心軸D3の旋回軸D1に対する方向(つまりフレーム3に対する方向)が変化し、図2および図3におけるシュート中心軸D3は、図中一点鎖線で示す状態から交点Oを中心に図中左側へと振れることになる。
【0041】
詳細は後述するが、ホルダ5およびロータ4はフレーム3に対して旋回軸D1まわりに回転する(旋回部分)。このようなロータ4およびホルダ5の回転に伴い、シュート6の先端の点Pは軌跡L1に沿って旋回する。図2および図3の状態では、シュート中心軸D3は旋回軸D1に対して最大角度をなしており、軌跡L1は最大である。
【0042】
ここで、ホルダ5をロータ4に対して回転させ、シュート中心軸D3を調整軸D2まわりに回転させることで、シュート中心軸D3の旋回軸D1に対する角度が小さくなってゆき、軌跡L1は徐々に小さくなる。これにより旋回散布および散布半径の調整が可能となる(調整機構)。
【0043】
本実施形態では、旋回軸D1と調整軸D2とが交差する第1角度A1が例えば20度とされ、調整軸D2とシュート中心軸D3とが交差する第2角度A2が例えば20度とされ、つまり第1角度A1と同じとされている。このため、ホルダ5の回転によりシュート中心軸D3が図2および図3の最も左寄りにある状態では、シュート中心軸D3は旋回軸D1に一致し、軌跡L1の半径が0となる。
【0044】
(旋回部分と調整機構)
装入装置1は、前述した旋回軸D1、調整軸D2、シュート中心軸D3を基準として、固定部分であるフレーム3に対し、旋回部分および調整機構であるロータ4、ホルダ5およびシュート6を旋回させる。
【0045】
フレーム3は、扁平な円筒状のケース30と、その上面を覆う上面板31と、下面を覆う下面板32とを有する。上面板31の中央には供給管33が設置され、この供給管33から供給される装入物がシュート6へと引き渡され、シュート6から高炉2内へと散布される。下面板32の中央には開口34が形成され、この開口34内にはロータ4が保持される。
【0046】
ロータ4は、供給管33の外周を囲う筒状の部分を有する上ケース41と、上ケース41の下側に接続されて内部にホルダ5を収容する下ケース42と、上ケース41の上側に接続されて、旋回用軸受431に支持されているマウント43とを備えている。
【0047】
マウント43は、上ケース41の上側に接続され、旋回用軸受431に支持され、ロータ4をフレーム3に回転自在に支持するものである。
旋回用軸受431は供給管33の周囲のフレーム3の上面板31の下面側に固定され、これによりロータ4の全体が旋回軸D1を中心に回転自在に支持されている。
ロータ4の内部には調整用軸受55が固定され、これにホルダ5が支持されている。これにより、ホルダ5は、ロータ4に対して調整軸D2を中心に回転自在に支持されている。
【0048】
図2、図3および図4に示すように、シュート6は、それぞれ円筒状の基端部60、本体61、接続部62を備えている。
基端部60は、上端がホルダ5に接続され、中心軸がホルダ5と同様に調整軸D2に一致されている。本体61は、基端部60の下端に接続され、中心軸がシュート中心軸D3に一致されている。接続部62は、前述した本体61と開口34が干渉するために切り欠いた部分で基端部60と本体61を接続させている。
【0049】
シュート6は、基端部60がホルダ5に接続され、ホルダ5がロータ4内に収容されることにより、基端部60に供給管33の先端が導入された状態とされる。この状態では、供給管33から装入物が供給されると、この装入物はシュート6を通ってその先端から高炉2内へと散布される。この際、高炉2内へ放出された時点の装入物の方向はシュート6の底面の方向D3´に沿ったものとされ、シュート6の方向を調整することで高炉2内への散布状態を制御することができる。
【0050】
より詳しくは、高炉2内へ放出される装入物は、シュート6の底面の方向D3´に沿って先端へ送られる。従って、高炉2内へ放出される装入物の方向は、シュート6の内面に沿った方向となる。ここで、シュート6の中心軸とシュート6の内面とがなす角度を第3角度A3として、第1角度A1と第2角度A2と第3角度A3との和は、シュート6に要求される最大傾斜角度となるように設定されている。なお、本実施形態では、角度A1と角度A2が同一角度とされている。
【0051】
本実施形態の装入装置1は、前述のようにシュート6から装入物を散布するにあたり、旋回部分であるロータ4とホルダ5ないしシュート6を一体に旋回させることで、装入物を高炉2内に所定半径の円周状に散布するとともに(旋回動作)、調整機構であるロータ4とホルダ5とを相対回転させることでシュート6の傾きを調整し(調整動作)、これにより散布半径を変化させて高炉2内の全域に装入物を散布できるようにしている。
これらの旋回動作および調整動作を行うために、装入装置1は、ロータ4を回転駆動する旋回駆動機構7と、ホルダ5を回転駆動する調整駆動機構8とを備えている。
【0052】
(旋回駆動機構と調整駆動機構)
旋回用軸受431の外周には歯車71が形成され、この歯車71には歯車72が噛み合わせられ、この歯車72には歯車73がかみ合わせられ、この歯車73はフレーム3の上面板31の上面に設置された旋回駆動モータ70により回転駆動される。
これらの旋回駆動モータ70、歯車71、72、73により旋回駆動機構7が構成されている。
【0053】
調整用軸受55の外周にはホルダ側傘歯歯車81が形成され、このホルダ側傘歯歯車81には伝達側傘歯歯車82が噛み合わせられている。
伝達側傘歯歯車82はフレーム3の上面板31の下面から延びる支持部材83により、フレーム3に固定されている調整用動力伝達軸受84に支持され、旋回軸D1を中心として回転自在である。ホルダ側傘歯歯車81はホルダ5と一体に調整軸D2まわりに回転するが、傘歯歯車とすることで、ホルダ側傘歯歯車81と伝達側傘歯歯車82は互いに回転力を伝達可能である。
【0054】
ホルダ側傘歯歯車81はロータ4内に収容され、伝達側傘歯歯車82はロータ4の外部に設置されるが、ロータ4の上ケース41には伝達用開口が形成されているため、相互の噛み合わせが確保されている。
【0055】
調整用動力伝達軸受84の外周には歯車85が形成され、この歯車85には歯車86が噛み合わせられ、この歯車86には歯車87が噛み合わせられ、この歯車87はフレーム3の上面板31の上面に設置された調整駆動モータ80により回転駆動される。
これらの調整駆動モータ80、ホルダ側傘歯歯車81、伝達側傘歯歯車82、歯車85、86及び87により調整駆動機構8が構成されている。
【0056】
(旋回角度センサと調整角度センサ)
装入装置1は、散布にあたってシュート6の旋回角度および傾斜角度を把握するために、旋回角度センサ79および調整角度センサ89を備えている。
【0057】
旋回角度センサ79は、フレーム3のロータ4に対向する部位に設置された変位センサで構成され、フレーム3に対するロータ4の回転を検出し、旋回部分であるロータ4、ホルダ5およびシュート6の旋回軸D1まわりの旋回角度を検出するものである。
他の構成として、旋回駆動モータ70に内蔵されたロータリーエンコーダを用い、旋回駆動モータ70の駆動軸の回転角度から旋回駆動機構7によるロータ4の旋回状態を演算してもよい。
【0058】
調整角度センサ89は、ロータ4のホルダ5に対向する部位に設置された変位センサで構成され、ロータ4に対するホルダ5の回転を検出し、調整機構としてのロータ4に対するホルダ5の調整軸D2まわりの回転角度を検出するものである。
【0059】
従って、旋回角度センサ79で検出される回転角度から、シュート6を含む旋回部分の旋回軸D1を中心とした回転角度を割り出すことができる。
また、調整角度センサ89で検出される回転角度から、ロータ4に対するホルダ5の調整軸D2を中心とした回転角度を割り出すことができ、このホルダ5の回転角度からシュート6の傾斜角度(角度A1−A2〜角度A1+A2)を演算して取得することができる。
【0060】
(旋回動作と調整動作)
本実施形態の装入装置1は、旋回駆動モータ70および調整駆動モータ80を動作させ、旋回駆動機構7および調整駆動機構8を協調動作させることにより、旋回軸D1まわりの旋回散布を行う。
そして、調整軸D2まわりにロータ4とホルダ5とを相対回転させることにより、シュート6の傾斜角度の調整により装入物の散布半径を調整し、複数の同心円状に旋回散布を繰り返してゆく。
この際、前述した旋回駆動機構7および調整駆動機構8の協調動作にあたっては、旋回角度センサ79により旋回状態を検出するとともに、調整角度センサ89によりシュート6の傾斜角度を検出し、シュート6が散布に必要な傾斜角度となるように制御を行う。
【0061】
図5および図6において、シュート6を旋回軸D1に対して最も傾いた状態(角度A1+A2)では、シュート6の先端Pは旋回軸D1から最も離れた状態(半径Rx)となる。この状態でロータ4およびホルダ5を一体に回転させると、シュート6の先端Pは半径Rxの軌跡L1に沿って旋回する。
ロータ4およびホルダ5を一体に回転させるためには、調整角度センサ89で検出される角度が一定となるように調整駆動モータ80を制御して、旋回駆動機構7と調整駆動機構8とを同期させ、ロータ4およびホルダ5を同じ速度で回転させればよい。
【0062】
ロータ4に対してホルダ5を相対回転させるためには、旋回駆動機構7と調整駆動機構8との同期をずらし、例えばホルダ5の回転速度をロータ4の回転速度よりも遅くする、あるいは一時的に停止させる等とすればよい。逆にホルダ5の回転速度をロータ4の回転速度よりも速くしてもよい。この際、調整角度センサ89で検出される角度が所望の角度まで変化するように調整駆動モータ80を制御する。
シュート6を、旋回軸を中心とした回転の特定の回転角度で停止するときはシュート6が旋回角度センサ79の特定の角度で停止するように旋回駆動モータ70を制御する。
【0063】
図7および図8において、シュート6の先端Pを軌跡L2に沿って移動させ、シュート6と旋回軸D1との傾き角度を小さくすることで、シュート6の先端Pの旋回軸D1からの距離(半径Rt)も小さくなる。この状態でロータ4およびホルダ5を一体に回転させることで、シュート6の先端Pは半径Rtの軌跡L1に沿って旋回する。
【0064】
図9および図10において、シュート6の先端Pを軌跡L2に沿って更に移動させ、シュート6と旋回軸D1とを一致させることで、互いの傾き角度が0となり、シュート6の先端Pの旋回軸D1からの距離(半径)も0となる。この状態では、シュート6の先端Pは旋回軸D1位置で旋回する。
このようにしてシュート6の先端Pの旋回半径を調整することができ、各旋回半径において旋回しつつ装入物を散布することで、高炉2内に均一にあるいは任意の分布で装入物を散布することができる。
【0065】
(制御装置と電源装置)
前述した通り、装入装置1は、フレーム3に支持されて旋回軸D1を中心に回転自在なロータ4およびホルダ5と、ホルダ5に支持されたシュート6とを有し、ロータ4に対するホルダ5の回転角度に応じてシュート6の傾斜角度を変化させる構成とされ、ロータ4を旋回軸D1まわりに回転させる旋回駆動モータ70と、ホルダ5を調整軸D2まわりに回転させる調整駆動モータ80とを有する。
これらの旋回駆動モータ70および調整駆動モータ80を制御するために、装入装置1は制御装置10(図11参照)を備えている。
【0066】
図11において、装入装置1はフレーム3の外部、例えば装入装置1が設置される高炉から離れた制御室などに設置された地上装置11と、フレーム3の内部のロータ4上に設置された機上装置91とを備えている。
地上装置11は、前述した制御装置10と、外部からの通信を受信して制御装置10に伝達する受信装置12と、これらの受信装置12および制御装置10に電力を供給する地上電源装置13とを備えている。
制御装置10は、別途登録された所定の動作プログラムに基づいて、前述した旋回角度センサ79および調整角度センサ89からの検出出力を参照しつつ、旋回駆動モータ70および調整駆動モータ80を制御することにより、装入装置1に所期の旋回動作および調整動作(後述)を実行させるものである。
【0067】
図11および図1〜図3にも示すように、旋回角度センサ79、旋回駆動モータ70および調整駆動モータ80は、それぞれ固定側であるフレーム3に設置されており、制御装置10との間の制御信号および電力供給用の配線はフレーム3を経由して適宜設置される(図示省略)。
しかし、調整角度センサ89は、ロータ4に設置されており、ロータ4がフレーム3に対して回転するため、制御装置10に直接接続することができない。このため、ロータ4に設置された機上装置91を介して制御装置10に、一部非接触の状態で接続される。
【0068】
図11において、機上装置91は、前述した調整角度センサ89を含むとともに、調整角度センサ89の検出信号を地上装置11の受信装置12に送信する送信装置92と、これらの送信装置92および調整角度センサ89に電力を供給する機上電源装置93とを備えている。
図12において、機上電源装置93は、充電可能な蓄電池931を有するとともに、この蓄電池931に充電する充電器として、充電制御回路932と、この充電制御回路932に充電用の電力を供給する発電機933および電力線934とを備えている。
【0069】
蓄電池931は、市販されている充電式の二次電池を適宜利用することができる。ただし、本実施形態の装入装置1は高炉に用いられてロータ4が高温に曝されるので、高温のもとでも十分な起電力が得られる形式のものを用いることが望ましい。
充電制御回路932は、発電機933および電力線934からの電力を利用して蓄電池931に充電を行うものであり、市販されている充電制御回路等であって、交流を適宜整流したうえで、蓄電池931の形式に適した充電用の電流に調整できるものが望ましい。
【0070】
発電機933は、ロータ4に設置される誘導コイル933Bと、フレーム3に設置されて誘導コイル933Bに対向する磁性体933Dとを有する。誘導コイル933Bにはコア933Aが貫通され、コア933Aは永久磁石933Cにより励磁されており、ロータ4の回転により磁性体933Dが接近し、コア933Aの端部に生じる磁束を通過することで、誘導コイル933Bに起電力を発生させることができる。
【0071】
図13および図1〜図3に示すように、誘導コイル933Bは、ロータ4の歯車85が設けられたフランジ状部分の歯車85の裏側に径方向外向きに設置される。磁性体933Dは、強磁性の鉄製ブロック等であり、フレーム3の内部に設置されたデッキ部分の、歯車85に臨む内周辺縁に沿って間欠的に複数が配列されている。このような構成により、ロータ4の回転に伴って誘導コイル933Bが複数の磁性体933Dを順次廻ってそれぞれ近接離隔することで、誘導コイル933Bに起電力を発生させ、充電制御回路932に供給することができる。
【0072】
図12に戻って、電力線934は、地上装置11の地上電源装置13と機上装置91の充電制御回路932とを結ぶ配線であり、フレーム3に対するロータ4の回転を許容するために、途中には非接触式の電磁カップリング935を有する。
電磁カップリング935は、機上装置91側にコア935Aに巻かれた誘導コイル935Bを有し、地上装置11側にコア935Cに巻かれた誘導コイル935Dを有し、誘導コイル935Dに地上電源装置13からの交流を通電されることで、誘導コイル935Bに対応する交流を発生させることができる。
【0073】
図13および図1〜図3に示すように、誘導コイル935Bは、ロータ4の歯車85が設けられたフランジ状部分の歯車85の裏側に、前述した発電機933の誘導コイル933Bと並べて径方向外向きに設置される。誘導コイル935Dは、フレーム3の内部に設置されたデッキ部分の、歯車85に臨む内周辺縁に沿って設置され、前述した磁性体933Dの一つと並べて設置されている。このような構成では、ロータ4の回転角度を調節し、誘導コイル935Bと誘導コイル933Dとが対向する位置で停止させることで、電磁カップリング935が導通状態とされ、地上電源装置13からの交流を充電制御回路932に供給することができる。
【0074】
(本実施形態の効果)
本実施形態によれば、旋回駆動機構7と調整駆動機構8とを協調動作させ、ホルダ5とロータ4とを一体的に同期回転させることで、装入物を旋回散布すること(旋回動作)ができるとともに、ホルダ5とロータ4との相対回転により相対角度を調整することで、旋回軸D1に対するシュート6の傾きを任意に調整することができ、高炉2内における装入物の散布半径を自由に調整すること(調整動作)ができる。
本実施形態においては、旋回動作において、シュート6の傾きを調整する調整動作を行いたい場合、旋回駆動機構7と調整駆動機構8との速度制御により、ロータ4とホルダ5とを同期回転状態から相対回転状態に切り替えることで簡単に行うことができる。
【0075】
そして、本実施形態では、ロータ4、ホルダ5、シュート6に対する前述した傾斜設定(旋回軸D1と調整軸D2との第1角度A1および調整軸D2とシュート中心軸D3との第2角度A2)により、シュート6の傾きを調整するようにしたため、回転方向別の複雑な支持機構などを設ける必要がなく、構成を簡略にすることができる。
さらに、旋回駆動機構7と調整駆動機構8との速度制御で旋回および角度調整が自由に行えるため、制御装置10における制御プログラムの設計により、多様な動作を自由に設定することができる。
【0076】
本実施形態においては、旋回角度センサ79および調整角度センサ89により、旋回駆動機構7および調整駆動機構8の制御に必要となる情報を適切に検出することができる。具体的には、旋回角度センサ79ではシュート6の旋回軸D1を中心とした回転の回転角度が検出できる。調整角度センサ89では、ホルダ5の調整軸D2を中心とした回転の回転角度が検出できる。
これによりシュート6の傾斜角度(角度A1−A2〜角度A1+A2)を読み取ることができ、シュート6の傾斜角度を精度よく制御しながら旋回軸D1を中心にシュート6を旋回させることができる。
【0077】
本実施形態では、調整角度センサ89が旋回部分であるロータ4に設置され、ホルダ5とロータ4との相対回転からシュート6の傾斜角度を直接的に検出することができる。このため、調整角度センサがフレーム3側に設置され、シュート6の傾斜角度を旋回部分の外部から間接的に検出する場合に比べ、検出精度を高めることができるとともに、シュート6からホルダ5、ロータ4、フレーム3に及ぶ複雑な検出機構を必要とせず、装置構造を簡略化することができる。
そして、調整角度センサ89は、ロータ4に設置されてフレーム3に対して常に移動するが、蓄電池931と、充電器である充電制御回路932、発電機933、電力線934とにより、固定側のフレーム3等に対して非接触のまま電力を確実に得ることができる。
【0078】
そして、充電器として発電機933を備えているため、高炉の装入装置1として常時旋回する部分に適用されることで、この旋回動作を利用して定常的に安定した電力が確保できる。
また、充電器として電力線934を備えているため、電磁カップリング935が機能する所定位置で停止させることで、発電機933が発電できない旋回停止状態であっても、地上電源装置13から電力供給を受けて充電器に充電することができる。
これらの発電機933および電力線934は、スリップリングのような摺動式の電気的接続を用いないため、高炉の装入装置1のような塵埃の大量に生じる部分にも使用しても確実な動作が得られる。
【0079】
さらに、本実施形態では、旋回駆動モータ70からロータ4に至る旋回駆動機構7および調整駆動モータ80からホルダ5に至る調整駆動機構8の何れにも差動機構を必要とせず、これらの大きな駆動力が要求される駆動経路の途中に複雑な遊星歯車等を設置しないでよいため、駆動経路中の差動機構に起因する装置の大型化や高コスト化を回避することができる。
また、旋回角度センサ79および調整角度センサ89の周辺等においても、遊星歯車等の差動機構を用いる必要はなく、装置の小型化や低コスト化を図ることができる。
【0080】
〔第2実施形態〕
図14には、本発明の第2実施形態が示されている。
本実施形態は、前述した第1実施形態と同様な構成を備えており、共通の部分については重複する説明を省略し、以下には異なる部分について説明する。
前述した第1実施形態では、機上電源装置93(図12参照)として、蓄電池931を有するとともに、充電器として充電制御回路932、発電機933および電力線934を備えていた。そして、発電機933として、ロータ4にコア933A、誘導コイル933B、永久磁石933Cを設置し、フレーム3に磁性体933Dを配列していた。
これに対し、本実施形態の機上装置91E(図14参照)において、機上電源装置93Eの発電機933Eでは、ロータ4側の永久磁石933Cが省略され、フレーム3に配列される磁性体933Dとして鉄製ブロックではなく永久磁石が採用されている。
このような本実施形態では、ロータ4が回転した際に、ロータ4側のコア933A、誘導コイル933Bが、ロータ4の回転に伴ってフレーム3側の磁性体933Dに順次近接離隔し、これにより起電力を発生させることができる。
このような本実施形態によっても、前述した第1実施形態と同様な効果を得ることができる。
【0081】
〔第3実施形態〕
図15には、本発明の第3実施形態が示されている。
本実施形態は、前述した第1実施形態と同様な構成を備えており、共通の部分については重複する説明を省略し、以下には異なる部分について説明する。
前述した第1実施形態では、機上電源装置93(図12参照)として、蓄電池931を有するとともに、充電器として充電制御回路932、発電機933および電力線934を備えていた。
これに対し、本実施形態の機上装置91F(図15参照)において、機上電源装置93Fは、電力線934が省略され、発電機933だけで電力供給が行われる構成とされている。発電機933は、前述した第1実施形態と同様な構成である。
このような本実施形態では、ロータ4が回転している間に、発電機933により電力供給を行うことができる。ロータ4が停止している間は発電機933による電力供給は行えず、蓄電池931に充電された電力だけで調整角度センサ89および送信装置92の動作をまかなうことになるため、蓄電池931の容量を大きく確保しておくことが望ましい。
このような本実施形態によっても、電力線934による効果を除き、前述した第1実施形態と同様な効果を得ることができる。
【0082】
〔第4実施形態〕
図16には、本発明の第4実施形態が示されている。
本実施形態は、前述した第1実施形態と同様な構成を備えており、共通の部分については重複する説明を省略し、以下には異なる部分について説明する。
前述した第1実施形態では、機上電源装置93(図12参照)として、蓄電池931を有するとともに、充電器として充電制御回路932、発電機933および電力線934を備えていた。
これに対し、本実施形態の機上装置91G(図16参照)において、機上電源装置93Gは、発電機933が省略され、電力線934だけで電力供給が行われる構成とされている。電力線934は、前述した第1実施形態と同様な構成である。
このような本実施形態では、ロータ4が所定位置で停止している間に、電力線934を介して地上電源装置13から電力供給を行うことができる。ロータ4が回転している間は電力線934による電力供給は行えず、蓄電池931に充電された電力だけで調整角度センサ89および送信装置92の動作をまかなうことになるため、蓄電池931の容量を大きく確保しておくことが望ましい。
このような本実施形態によっても、発電機933による効果を除き、前述した第1実施形態と同様な効果を得ることができる。
【0083】
〔第5実施形態〕
図17には、本発明の第5実施形態が示されている。
本実施形態は、前述した第1実施形態と同様な構成を備えており、共通の部分については重複する説明を省略し、以下には異なる部分について説明する。
本実施形態の装入装置1は、制御装置として同期モードで動作する制御装置10Aを備えたものである。
同期モードとは、シュート傾斜角度(現在のシュート6の旋回軸D1に対する傾斜角度)が所望の角度(シュート傾斜角度リファレンス)からずれている場合(角度偏差(°)が0でない場合)、旋回駆動モータ70と調整駆動モータ80との間に回転速度差を生じさせて、角度偏差を小さくする制御を常時行い、角度偏差を0にすることを目標に調整駆動モータ80を制御することで、旋回駆動モータ70と調整駆動モータ80との間に回転速度差をなくす(旋回駆動モータ70と調整駆動モータ80とを同期させる)フィードバック制御を意味する。
【0084】
制御装置10Aは、入力部100Aと、第1モータコントローラ101Aと、傾斜角度検出部102Aと、偏差演算手段103Aと、補正速度演算手段としての速度リミッタ106Aと、加算器107Aと、第2モータコントローラ108Aとを備える。
なお、調整角度センサ89、傾斜角度検出部102A、偏差演算手段103A、速度リミッタ106A、加算器107A、第2モータコントローラ108A、調整駆動モータ80は、同期モードでの動作を実現する同期モードループを構成している。
【0085】
第1モータコントローラ101Aには、入力部100Aから、旋回駆動モータ70の回転速度に応じた大きさの旋回速度指令が入力される。そして、第1モータコントローラ101Aは、旋回速度指令に基づく回転速度(指令旋回速度)Gで旋回駆動モータ70を回転させる。
傾斜角度検出部102Aは、調整角度センサ89からの電気的な信号に基づいて、旋回軸D1に対するシュート中心軸D3の傾斜角度をシュート傾斜角度実績値として検出し、このシュート傾斜角度実績値を偏差演算手段103Aへ出力する。
【0086】
偏差演算手段103Aは、減算器104Aと、誤差増幅器105Aとを備える。
減算器104Aには、入力部100Aから、シュート傾斜角度の目標値であるシュート傾斜角度リファレンス(シュート傾斜角度REF)Erが入力され、傾斜角度検出部102Aからシュート傾斜角度実績値が入力される。そして、減算器104Aは、シュート傾斜角度リファレンスからシュート傾斜角度実績値を減じた角度偏差、すなわち、シュート傾斜角度の目標値に対する実績値のずれを演算して、誤差増幅器105Aへ出力する。
誤差増幅器105Aは、減算器104Aから入力される角度偏差に対応する電気信号を増幅して、速度リミッタ106Aへ出力する。具体的に、誤差増幅器105Aは、シュート傾斜角度の角度偏差と、増幅のゲインに対応する値とを乗じて得られる増幅角度偏差(°)に対応する電気信号を出力する。
【0087】
速度リミッタ106Aは、図18に示す関係に基づいて、最大補正速度または偏差対応補正速度を、同期補正速度として、加算器107Aへ出力する。
この同期補正速度は、一般的に制御が乱調しない範囲で大きめの速度に設定され、位置制御誤差が小さくなるような回転速度に対応する。
【0088】
具体的に、速度リミッタ106Aは、増幅角度偏差の絶対値が所定の閾角度以上の場合には、同期補正速度として演算されうる最大の値である最大補正速度を、同期補正速度として出力する。また、増幅角度偏差の絶対値が0よりも大きく、所定の閾角度未満の場合には、増幅角度偏差の大きさに比例する偏差対応補正速度を、同期補正速度として出力する。なお、偏差対応補正速度は、増幅角度偏差が大きくなるにしたがって段階的に大きくなるような速度であってもよい。
なお、増幅角度偏差が正の値の場合には、シュート傾斜角度実績値がシュート傾斜角度リファレンスよりも小さいので、調整駆動モータ80の回転速度を旋回駆動モータ70の回転速度よりも遅くして、シュート傾斜角度を大きくする必要がある。このため、速度リミッタ106Aは、正の同期補正速度を出力する。一方、増幅角度偏差が負の値の場合には、シュート傾斜角度を小さくする必要があるため、負の同期補正速度を出力する。
【0089】
加算器107Aには、入力部100Aから旋回速度指令が入力されるとともに、速度リミッタ106Aから同期補正速度が入力される。そして、加算器107Aは、旋回速度指令の指令旋回速度と同期補正速度とを加えて得られる回転速度(指令調整速度)Gbを、調整速度指令として、第2モータコントローラ108Aへ出力する。このとき、指令調整速度は、同期補正速度が負の値の場合には、指令旋回速度よりも遅くなり、同期補正速度が正の値の場合には、指令旋回速度よりも速くなる。
第2モータコントローラ108Aは、第2加算器107Aからの調整速度指令に基づいて、指令調整速度で調整駆動モータ80を回転させる。
【0090】
以上のような構成により、制御装置10Aは、以下のように動作する。
シュート傾斜角度実績値とシュート傾斜角度リファレンスが異なる場合、制御装置10Aの減算器104Aで演算される角度偏差は、0以外の値となる。このため、同期補正速度として出力される、正または負の最大補正速度、偏差対応補正速度も、0以外の値となる。そして、指令調整速度は、指令旋回速度よりも速く、または、遅くなり、旋回駆動モータ70の回転速度は変化せずに、調整駆動モータ80の回転速度のみが変化する。
その結果、各モータ70,80は、異なる回転速度で回転し、シュート傾斜角度がシュート傾斜角度リファレンスに近づくように、すなわち角度偏差が0に近づくように調整される。
そして、この調整の結果、シュート傾斜角度実績値がシュート傾斜角度リファレンスと等しくならない場合には、このシュート傾斜角度実績値に基づいて、再度、調整駆動モータ80を指令旋回速度と異なる指令調整速度で回転させてシュート傾斜角度を調整する。
一方、シュート傾斜角度実績値がシュート傾斜角度リファレンスと等しくなった場合には、角度偏差が0になるため、指令調整速度と指令旋回速度とが等しくなる。その結果、旋回駆動モータ70と調整駆動モータ80は、同期する。
【0091】
このような本実施形態によれば、制御装置10Aは、シュート傾斜角度実績値とシュート傾斜角度リファレンスに基づき演算される増幅角度偏差を従前よりも小さくするような同期補正速度を演算し、この同期補正速度と指令旋回速度とを加算した指令調整速度で調整駆動モータ80を回転させる。このため、シュート6を精度よく所望のシュート傾斜角度に制御できる。
特に、同期補正速度を指令旋回速度に加算するだけの簡単な演算で指令調整速度を設定できるので、制御装置10Aを安価に構成できる。
また、制御装置10Aは、図18に示す関係に基づいて、増幅角度偏差の絶対値が所定の閾角度以上の場合には、最大補正速度を同期補正速度として出力するので、指令旋回速度を所定速度以下に設定することができ、調整駆動モータ80の負荷を抑制できる。また、所定の閾角度未満の場合には、偏差対応補正速度を同期補正速度として出力するので、回転速度の変更で角度偏差をほぼ0にすることができる。
そして、偏差演算手段103Aは、減算器104Aで得られた角度偏差を、誤差増幅器105Aで増幅して速度リミッタ106Aに出力する。このため、角度偏差の検出感度を高めることができ、精度よく所望のシュート傾斜角度に制御できる。
【0092】
〔第6実施形態〕
図19には、本発明の第6実施形態が示されている。
本実施形態は、前述した第5実施形態と基本構成が同じであり、共通の部分については重複する説明を省略し、以下には異なる部分について説明する。
制御装置10Bは、第5実施形態と同様の同期モードで動作するとともに、位置決めモードと、手動モードとで動作する。
【0093】
位置決めモードとは、同期モードと同様に、角度偏差が0でない場合、調整駆動モータ80の回転速度を変化させて、角度偏差を小さくする制御を行い、角度偏差が0になった後には旋回駆動モータ70と調整駆動モータ80とを同期させるフィードバック制御を意味する。
また、位置決めモードは、同期モードよりも角度偏差を0にするまでの時間を短くできるという特徴を有している。具体的に、同期モードでは、角度偏差が小さくなってくると、同期補正速度として演算される偏差対応補正速度も小さくなるため、角度偏差が0になるまでの時間が長くなる。そこで、位置決めモードでは、角度偏差が小さい場合でもある程度の大きさの補正速度を調整駆動モータ80に与えることで、角度偏差が0になるまでの時間を短くしている。
手動モードとは、同期モードや位置決めモードのようなフィードバック制御ではなく、作業者の設定入力に基づく所望のシュート傾斜角度となるように、調整駆動モータ80の回転速度を1回だけ変化させる制御を意味する。
【0094】
これらの各モードを切り替えるために、制御装置10Bは、第5実施形態の制御装置10Aに設けられた各構成101A〜108Aと、第1スイッチとしての同期モードスイッチ110Bと、多段速位置決め器111Bと、第2スイッチとしての位置決めモードスイッチ112Bと、手動高速スイッチ113Bと、手動正転スイッチ114Bと、手動低速スイッチ115Bと、手動逆転スイッチ116Bと、乗算器117Bとを備える。
同期モードスイッチ110Bは、速度リミッタ106Aと加算器107Aとの間に設けられている。この同期モードスイッチ110Bがオンとなるとともに、各スイッチ112B〜116Bがオフになると、調整角度センサ89、傾斜角度検出部102A、減算器104A、誤差増幅器105A、速度リミッタ106A、加算器107A、第2モータコントローラ108A、調整駆動モータ80から構成される同期モードループが有効となり、同期モードでの制御可能となる。
【0095】
多段速位置決め器111Bは、減算器104Aおよび誤差増幅器105Aの接続点と、加算器107Aおよび同期モードスイッチ110Bの接続点との間に設けられている。この多段速位置決め器111Bは、図20に示す関係に基づいて、高速補正速度、中速補正速度、低速補正速度のうちのいずれか1つを演算して、位置決め補正速度として、加算器107Aへ出力する。
この位置決め補正速度としては、角度偏差が位置決め完了角度以上の場合には、角度偏差の大きさに応じて、高速補正速度、中速補正速度、低速補正速度のいずれかが選択され、位置決め完了角度未満の場合には、0が選択されて位置決め動作が完了する。
【0096】
具体的に、多段速位置決め器111Bは、角度偏差の絶対値が高速閾角度以上の場合には、位置決め補正速度として演算されうる最大の値である高速補正速度を、位置決め補正速度として出力する。
また、角度偏差の絶対値が、高速閾角度未満かつ中速閾角度以上の場合には中速補正速度を、中速閾角度未満かつ位置決め完了角度以上の場合には低速補正速度を、位置決め補正速度として出力する。
なお、多段速位置決め器111Bは、角度偏差が正の値の場合には、シュート傾斜角度を大きくする必要があるため、正の位置決め補正速度を出力する。一方、角度偏差が負の値の場合には、シュート傾斜角度を小さくする必要があるため、負の位置決め補正速度を出力する。
【0097】
位置決めモードスイッチ112Bは、加算器107Aおよび同期モードスイッチ110Bの接続点と、多段速位置決め器111Bとの間に設けられている。この位置決めモードスイッチ112Bがオンとなるとともに、各スイッチ110B,113B〜116Bがオフになると、調整角度センサ89、傾斜角度検出部102A、減算器104A、多段速位置決め器111B、加算器107A、第2モータコントローラ108A、調整駆動モータ80から構成される制御ループ(位置決めモードループ)が有効となり、位置決めモードでの制御可能となる。
手動高速スイッチ113Bおよび手動正転スイッチ114Bは、同期モードスイッチ110Bおよび位置決めモードスイッチ112Bの接続点と、手動高速設定速度を入力可能な入力部100Aとの間に設けられている。手動高速スイッチ113Bは、手動正転スイッチ114Bよりも入力部100A側に設けられている。
【0098】
手動低速スイッチ115B、手動逆転スイッチ116B、および、乗算器117Bは、位置決めモードスイッチ112Bおよび手動正転スイッチ114Bの接続点と、手動低速設定速度を入力可能な入力部100Aとの間に設けられている。手動低速スイッチ115Bは、手動逆転スイッチ116Bよりも入力部100A側に設けられている。また、手動逆転スイッチ116Bは、乗算器117Bよりも手動低速スイッチ115B側に設けられている。さらに、手動高速スイッチ113Bおよび手動正転スイッチ114Bと、手動低速スイッチ115Bおよび手動逆転スイッチ116Bとは、電気的に接続されている。
なお、手動高速設定速度は、手動低速設定速度よりも速く設定される。また、手動高速設定速度および手動低速設定速度は、いずれも正の値として設定される。
【0099】
乗算器117Bは、正の値として入力される手動高速設定速度や手動低速設定速度に「−1」を乗じることで、負の手動高速設定速度や手動低速設定速度を求め、この求めた速度を加算器107Aに出力する。
そして、同期モードスイッチ110Bと位置決めモードスイッチ112Bとがオフの場合における、各スイッチ113B〜116Bのオンオフ状態と手動モードとの関係は、表1に示すようになる。
【0100】
【表1】
【0101】
ここで、高速正転モードおよび低速正転モードとは、調整駆動モータ80の回転速度を速くすることで、シュート傾斜角度を小さくするモードである。高速逆転モードおよび低速逆転モードとは、調整駆動モータ80の回転速度を遅くすることで、シュート傾斜角度を大きくするモードである。
高速正転モードおよび高速逆転モードは、短時間でシュート傾斜角度を変化させたい場合に利用される。また、低速正転モードおよび低速逆転モードは、調整駆動モータ80の負荷を低減するために、多少の時間をかけてシュート傾斜角度を変化させたい場合に利用される。
【0102】
以上のような構成により、制御装置10Bは、以下のように動作する。
なお、同期モードでの動作は、第5実施形態と同じなので説明を省略する。
(位置決めモードでの動作)
シュート傾斜角度実績値とシュート傾斜角度リファレンスが異なり、かつ、制御装置10Bの減算器104Aで演算される角度偏差が位置決め完了角度以上の場合、位置決め補正速度として、角度偏差量に応じて、正または負の高速補正速度、中速補正速度、低速補正速度が選択される。そして、指令調整速度は、指令旋回速度よりも速く、または、遅くなり、調整駆動モータ80の回転速度のみが変化する。
その結果、各モータ70,80は、異なる回転速度で回転し、角度偏差が0に近づくようにシュート6の傾きが調整される。
また、角度偏差が位置決め完了角度未満となった場合には、位置決めモードスイッチ112Bをオフにするとともに、同期モードスイッチ110Bをオンにして、同期モードでの制御を行う。
一方、シュート傾斜角度実績値がシュート傾斜角度リファレンスと等しくなった場合には、角度偏差が0になるため、指令調整速度と指令旋回速度とが等しくなり、旋回駆動モータ70と調整駆動モータ80は、同期する。
【0103】
(手動モードでの動作)
この場合、制御装置10Bの加算器107Aには、正または負の手動高速設定速度あるいは手動低速設定速度が入力される。加算器107Aは、この入力された設定速度と、旋回速度指令の指令旋回速度とを加えて得られる指令調整速度を、調整速度指令として、第2モータコントローラ108Aへ出力する。そして、第2モータコントローラ108Aの制御により、調整駆動モータ80の回転速度が所定時間だけ変化して、シュート傾斜角度が変化する。
この変化後のシュート傾斜角度は、シュート傾斜角度実績値として傾斜角度検出部102Aで検出され、新しいシュート傾斜角度リファレンスとして設定される。
【0104】
このような本実施形態によれば、制御装置10Bは、高速補正速度、中速補正速度、低速補正速度を位置決め補正速度として演算する位置決めモードで動作するので、同期モードよりも角度偏差を0にするまでの時間を短くできる。
また、制御装置10Bは、手動モードでも動作するので、シュート傾斜角度を大きく変化させたい場合には、迅速に対応できる。
【0105】
本実施形態の制御装置における制御状態の具体例について説明する。
図21は、第6実施形態の制御装置における制御状態を表すタイムチャートであり、(A)は旋回駆動モータ70の旋回速度、(B)はシュート6の旋回角度、(C)は調整駆動モータ80の調整速度、(D)はシュート6の傾斜角度を示す。なお、図23(B)において、旋回角度が0°のときと360°のときには、シュート6は同じ場所に位置している。
本具体例では各種パラメータを以下の通り設定した。
・高速補正速度 :150rpm
・中速補正速度 : 70rpm
・低速補正速度 : 40rpm
・初期の傾斜角度: 40°
そして、以下の表2に示す状態でシュート傾斜角度の制御を行った。なお、表2中の経過時間は、おおよその時間を表している。
【0106】
【表2】
【0107】
その結果、図21に示すように、制御装置10Bにおける同期モードおよび位置決めモードの切り替えにより、シュート傾斜角度を精度よく所望の角度に変更できることが確認できた。
【0108】
〔第7実施形態〕
図22および図23には、本発明の第7実施形態が示されている。
前述した第1実施形態ないし第6実施形態は、それぞれ旋回部分としてロータ4、ホルダ5およびシュート6を設け、シュート6の傾斜角度を調整するための調整機構として、ロータ4とホルダ5とを傾斜面に対して相対回転させることでシュート6の傾斜角度を調整する方式であったが、本発明は前述した特許文献1に記載された調整機構、すなわちシュート6を水平な回動軸で支持し、歯車で伝達される回転により傾斜角度を調整するものである。
【0109】
図22および図23において、フレーム3および供給管33は前述した第1実施形態と同様であり、供給管33は図示省略した構成を介して歯車71と一体に旋回可能である。
供給管33の下端には円盤状のプレート33Aが固定されるとともに、その上面側には供給管33を直径方向に貫通する回動軸6Aが配置され、シュート6は基端部をこの回動軸6Aに固定されて傾斜角度が調整可能である。
回動軸6Aの端部には扇形の部分歯車6Bが固定され、この部分歯車6Bには歯車6Cが噛み合わせられ、この歯車6Cにはウォーム歯車6Eが噛み合わせられている。ウォーム歯車6Eは供給管33に回転自在に支持されるとともに、ウォーム歯車6Eには歯車6Fが固定され、この歯車6Fは歯車85に噛み合わせられている。
【0110】
歯車71には、前記第1実施形態と同様な旋回駆動機構7が接続されており、旋回駆動モータ70の駆動力により歯車71および供給管33が旋回駆動され、これによりシュート6が旋回する。
歯車85には、前記第1実施形態と同様な調整駆動機構8が接続されており、調整駆動モータ80の駆動力により歯車85が回転駆動され、歯車71との相対回転がウォーム歯車6Eに取り出され、回動軸6Aの回動として伝達され、シュート6の傾斜が変更される。
旋回駆動機構7の回転を検出するために、歯車71の外周に沿って旋回角度センサ79が設置されている。この旋回角度センサ79はフレーム3に支持されている。
調整駆動機構8の回転を検出するために、回動軸6Aの端部には調整角度センサ89が設置されている。
【0111】
プレート33Aの上面には機上装置91が設置され、その内部には機上電源装置93が設置されている。プレート33Aの下面には機上電源装置93の誘導コイル933B,935Bが設置され、対向するフレーム3の部分には磁性体933Dおよび誘導コイル935Dが配列されている。
これらの機上装置91、機上電源装置93、誘導コイル933B,935B、935Dおよび磁性体933Dは、それぞれ前記第1実施形態と同様なものである。
【0112】
このような本実施形態においても、旋回駆動機構7および調整駆動機構8の同期回転動作によりシュート6の旋回が行われるとともに、旋回駆動機構7と調整駆動機構8との相対回転によりシュート6の傾斜角度の調整が行われ、この点で前述した第1実施形態と共通である。
また、本実施形態においても、旋回角度センサ79および調整角度センサ89により、旋回駆動機構7および調整駆動機構8の制御に必要となる状態量を適切に検出することができる。特に、本実施形態では、旋回部分に設置された調整角度センサ89により、シュート6の傾斜角度を直接検出することができる。
さらに、前記第1実施形態と同様に、機上装置91および地上装置11により、調整角度センサ89を旋回部分であるプレート33Aに設置しつつ、調整角度センサ89からの信号を地上の制御装置10に接続し、あるいは調整角度センサ89の電源を供給することができる。
【0113】
〔変形例〕
なお、本発明は前記各実施形態に限定されるものではなく、具体的な各部構成などは実施にあたって適宜変形することができる。
前述した各実施形態では、図1あるいは図4に示すように、旋回駆動モータ70および調整駆動モータ80を隣接して設置したが、旋回駆動モータ70および調整駆動モータ80を離して設置してもよい。
また、ホルダ側傘歯歯車81を外歯歯車とし、伝達側傘歯歯車82を内歯歯車としたが、これらの他の歯車であってもよい。
例えば、ホルダ側傘歯歯車81を内歯歯車、伝達側傘歯歯車82を外歯歯車としてもよく、このような構成でも、前述した図1の実施形態と同様な効果を得ることができる。
【0114】
また、前述した第5,第6実施形態において、誤差増幅器105Aを設けずに、減算器104Aで演算された角度偏差を、直接、速度リミッタ106Aに入力し、速度リミッタ106Aにおいて、角度偏差に基づいて、同期補正速度を演算してもよい。
さらに、前述した第5,第6実施形態において、誤差増幅器105Aとして、ゲインを変更できるような増幅器を設けてもよい。
【0115】
その他、前述した各実施形態の細部構成などは適宜変更してよく、前述した傾斜設定(旋回軸D1と調整軸D2との第1角度A1および調整軸D2とシュート中心軸D3との第2角度A2)が得られる構成であれば本発明に適宜利用することができる。
【産業上の利用可能性】
【0116】
本発明は、装入装置およびその制御方法に関し、高炉などの容器内部に装入物を装入する装置として利用できる。
【符号の説明】
【0117】
1…装入装置
2…高炉
3…フレーム
4…旋回部分および調整機構であるロータ
5…旋回部分および調整機構であるホルダ
6…旋回部分であるシュート
7…旋回駆動機構
8…調整駆動機構
10,10A,10B…制御装置
11…地上装置
12…受信装置
13…地上電源装置
70…旋回駆動モータ
79…旋回角度センサ
80…調整駆動モータ
89…調整角度センサ
91,91E,91F,91G…機上装置
92…送信装置
93,93E,93F,93G…機上電源装置
931…蓄電池
932…充電器である充電制御回路
933…発電機
933B…誘導コイル
933D…磁性体
934…電力線
935…電磁カップリング
935B,935D…誘導コイル
100A…入力部
101A…第1モータコントローラ
102A…傾斜角度検出部
103A…偏差演算手段
106A…補正速度演算手段としての速度リミッタ
107A…加算器
108A…第2モータコントローラ
110B…第1スイッチとしての同期モードスイッチ
112B…第2スイッチとしての位置決めモードスイッチ
A1…第1角度
A2…第2角度
A3…第3角度
D1…旋回軸
D2…調整軸
D3…シュート中心軸
【特許請求の範囲】
【請求項1】
フレームに支持されて旋回軸を中心に回転自在な旋回部分と、前記旋回部分に支持されたシュートと、前記旋回部分に対する回転角度に応じて前記シュートの傾斜角度を変化させる調整機構と、前記旋回部分を回転させる旋回駆動モータと、前記調整機構を回転させる調整駆動モータとを有するとともに、
前記旋回部分に、前記シュートの傾斜角度を検出する調整角度センサと、前記調整角度センサに電力を供給する蓄電池と、前記蓄電池に充電する充電器とを有することを特徴とする装入装置。
【請求項2】
請求項1に記載された装入装置において、
前記充電器は、前記旋回部分の外周に設置された誘導コイルと、前記フレームに設置されて前記誘導コイルに対向する磁性体とを有し、前記旋回部分の回転により前記誘導コイルに発生する起電力で前記蓄電池を充電する発電機を備えることを特徴とする装入装置。
【請求項3】
請求項1または請求項2に記載された装入装置において、
前記充電器は、一方が前記旋回部分の外周に設置されかつ他方が前記フレームに設置された電磁カップリングを有し、前記電磁カップリングを介して外部から供給される電力で前記蓄電池を充電する電力線を備えることを特徴とする装入装置。
【請求項4】
請求項1から請求項3の何れかに記載された装入装置において、
前記フレームに支持されて前記旋回軸を中心に回転可能なロータと、前記ロータに設定されて前記旋回軸に第1角度で交差する調整軸と、前記ロータに支持されて前記調整軸を中心に回転可能なホルダと、前記ホルダに固定されて前記調整軸に第2角度で交差する方向へ延びるシュートと、前記フレームに固定されて前記ロータを前記フレームに対して回転させる旋回駆動モータと、前記フレームに支持されて前記旋回軸を中心に回転可能な伝達側傘歯歯車と、前記ホルダに固定されて前記伝達側傘歯歯車に噛み合うホルダ側傘歯歯車と、前記フレームに固定されて前記伝達側傘歯歯車を回転させることで前記ホルダを前記ロータに対して回転させる調整駆動モータと、を有するとともに、
前記調整角度センサは、前記ホルダおよび前記ロータの前記調整軸まわりの相対角度から前記旋回軸に対する前記シュートの傾斜角度を検出するものであり、
前記蓄電池および前記充電器は、前記ロータまたは前記ホルダに設置されていることを特徴とする装入装置。
【請求項5】
請求項1から請求項4の何れかに記載された装入装置において、
前記シュートの傾斜角度を所定の角度とする際に、前記調整角度センサで検出される角度を参照しつつ前記調整駆動モータを制御する制御装置を備え、
前記制御装置は、
入力操作に対応する指令を出力可能な入力部と、
この入力部から入力される、前記旋回駆動モータに対して設定された回転速度を表す指令に基づいて、前記旋回駆動モータを回転させる第1モータコントローラと、
前記入力部から入力される前記所定の角度と前記調整角度センサで検出された前記シュートの傾斜角度との偏差を演算する偏差演算手段と、
前記偏差演算手段で演算された偏差に基づいて、前記調整駆動モータの回転速度を変更するための補正速度を演算する補正速度演算手段と、
前記入力部からの指令に基づく回転速度と前記補正速度演算手段で演算された補正速度とを加算する加算器と、
前記加算器における加算で得られた回転速度で、前記調整駆動モータを回転させる第2モータコントローラと、を備え、
前記補正速度演算手段は、前記調整駆動モータの回転速度の変更後に前記偏差演算手段で新たに演算される偏差が、回転速度の変更前に演算された偏差よりも小さくなるような補正速度を演算することを特徴とする装入装置。
【請求項6】
請求項5に記載された装入装置において、
前記補正速度演算手段は、
前記偏差演算手段で演算された偏差が予め設定された閾角度以上の場合には、固定された値である最大補正速度を前記補正速度として演算し、
前記閾角度未満の場合には、前記偏差の大きさに応じて異なり、かつ、前記最大補正速度未満の値である偏差対応補正速度を前記補正速度として演算することを特徴とする装入装置。
【請求項7】
請求項5または請求項6に記載された装入装置において、
前記制御装置は、
前記加算器と前記偏差演算手段との間に設けられ、前記加算器に前記補正速度を入力可能なオン状態と入力不可能なオフ状態とを切り替え可能な第1スイッチと、
前記加算器と前記入力部との間に設けられ、前記加算器に前記入力部からの指令を入力可能なオン状態と入力不可能なオフ状態とを切り替え可能な第2スイッチと、を備え、
前記加算器は、
前記第1スイッチによりオフ状態に設定され、かつ、前記第2スイッチによりオン状態に設定された場合、前記入力部からそれぞれ入力される、前記旋回駆動モータに対して設定された回転速度と、前記傾斜角度を変更するための回転速度とを加算して、その結果を前記第2モータコントローラに出力し、
前記第1スイッチによりオン状態に設定され、かつ、前記第2スイッチによりオフ状態に設定された場合、前記入力部から入力される前記旋回駆動モータに対して設定された回転速度と、前記補正速度演算手段で演算された補正速度とを加算して、その結果を前記第2モータコントローラに出力することを特徴とする装入装置。
【請求項8】
請求項1から請求項4の何れかに記載された装入装置の制御方法であって、
入力操作に対応する指令を出力可能な入力部から入力される、前記旋回駆動モータに対して設定された回転速度を表す指令に基づいて、前記旋回駆動モータを回転させる第1モータコントロール工程と、
前記入力部から入力される前記所定の角度と前記調整角度センサで検出された前記シュートの傾斜角度との偏差を演算する偏差演算工程と、
前記偏差演算工程で演算された偏差に基づいて、前記調整駆動モータの回転速度を変更するための補正速度を演算する補正速度演算工程と、
前記入力部からの指令に基づく回転速度と前記補正速度演算工程で演算された補正速度とを加算する加算工程と、
前記加算工程における加算で得られた回転速度で、前記調整駆動モータを回転させる第2モータコントロール工程と、を備え、
前記補正速度演算工程は、前記調整駆動モータの回転速度の変更後に前記偏差演算工程で新たに演算される偏差が、回転速度の変更前に演算された偏差よりも小さくなるような補正速度を演算することを特徴とする装入装置の制御方法。
【請求項9】
請求項8に記載された装入装置の制御方法において、
前記補正速度演算工程では、
前記偏差演算工程で演算された偏差が予め設定された閾角度以上の場合には、固定された値である最大補正速度を前記補正速度として演算し、
前記閾角度未満の場合には、前記偏差の大きさに応じて異なり、かつ、前記最大補正速度未満の値である偏差対応補正速度を前記補正速度として演算することを特徴とする装入装置の制御方法。
【請求項1】
フレームに支持されて旋回軸を中心に回転自在な旋回部分と、前記旋回部分に支持されたシュートと、前記旋回部分に対する回転角度に応じて前記シュートの傾斜角度を変化させる調整機構と、前記旋回部分を回転させる旋回駆動モータと、前記調整機構を回転させる調整駆動モータとを有するとともに、
前記旋回部分に、前記シュートの傾斜角度を検出する調整角度センサと、前記調整角度センサに電力を供給する蓄電池と、前記蓄電池に充電する充電器とを有することを特徴とする装入装置。
【請求項2】
請求項1に記載された装入装置において、
前記充電器は、前記旋回部分の外周に設置された誘導コイルと、前記フレームに設置されて前記誘導コイルに対向する磁性体とを有し、前記旋回部分の回転により前記誘導コイルに発生する起電力で前記蓄電池を充電する発電機を備えることを特徴とする装入装置。
【請求項3】
請求項1または請求項2に記載された装入装置において、
前記充電器は、一方が前記旋回部分の外周に設置されかつ他方が前記フレームに設置された電磁カップリングを有し、前記電磁カップリングを介して外部から供給される電力で前記蓄電池を充電する電力線を備えることを特徴とする装入装置。
【請求項4】
請求項1から請求項3の何れかに記載された装入装置において、
前記フレームに支持されて前記旋回軸を中心に回転可能なロータと、前記ロータに設定されて前記旋回軸に第1角度で交差する調整軸と、前記ロータに支持されて前記調整軸を中心に回転可能なホルダと、前記ホルダに固定されて前記調整軸に第2角度で交差する方向へ延びるシュートと、前記フレームに固定されて前記ロータを前記フレームに対して回転させる旋回駆動モータと、前記フレームに支持されて前記旋回軸を中心に回転可能な伝達側傘歯歯車と、前記ホルダに固定されて前記伝達側傘歯歯車に噛み合うホルダ側傘歯歯車と、前記フレームに固定されて前記伝達側傘歯歯車を回転させることで前記ホルダを前記ロータに対して回転させる調整駆動モータと、を有するとともに、
前記調整角度センサは、前記ホルダおよび前記ロータの前記調整軸まわりの相対角度から前記旋回軸に対する前記シュートの傾斜角度を検出するものであり、
前記蓄電池および前記充電器は、前記ロータまたは前記ホルダに設置されていることを特徴とする装入装置。
【請求項5】
請求項1から請求項4の何れかに記載された装入装置において、
前記シュートの傾斜角度を所定の角度とする際に、前記調整角度センサで検出される角度を参照しつつ前記調整駆動モータを制御する制御装置を備え、
前記制御装置は、
入力操作に対応する指令を出力可能な入力部と、
この入力部から入力される、前記旋回駆動モータに対して設定された回転速度を表す指令に基づいて、前記旋回駆動モータを回転させる第1モータコントローラと、
前記入力部から入力される前記所定の角度と前記調整角度センサで検出された前記シュートの傾斜角度との偏差を演算する偏差演算手段と、
前記偏差演算手段で演算された偏差に基づいて、前記調整駆動モータの回転速度を変更するための補正速度を演算する補正速度演算手段と、
前記入力部からの指令に基づく回転速度と前記補正速度演算手段で演算された補正速度とを加算する加算器と、
前記加算器における加算で得られた回転速度で、前記調整駆動モータを回転させる第2モータコントローラと、を備え、
前記補正速度演算手段は、前記調整駆動モータの回転速度の変更後に前記偏差演算手段で新たに演算される偏差が、回転速度の変更前に演算された偏差よりも小さくなるような補正速度を演算することを特徴とする装入装置。
【請求項6】
請求項5に記載された装入装置において、
前記補正速度演算手段は、
前記偏差演算手段で演算された偏差が予め設定された閾角度以上の場合には、固定された値である最大補正速度を前記補正速度として演算し、
前記閾角度未満の場合には、前記偏差の大きさに応じて異なり、かつ、前記最大補正速度未満の値である偏差対応補正速度を前記補正速度として演算することを特徴とする装入装置。
【請求項7】
請求項5または請求項6に記載された装入装置において、
前記制御装置は、
前記加算器と前記偏差演算手段との間に設けられ、前記加算器に前記補正速度を入力可能なオン状態と入力不可能なオフ状態とを切り替え可能な第1スイッチと、
前記加算器と前記入力部との間に設けられ、前記加算器に前記入力部からの指令を入力可能なオン状態と入力不可能なオフ状態とを切り替え可能な第2スイッチと、を備え、
前記加算器は、
前記第1スイッチによりオフ状態に設定され、かつ、前記第2スイッチによりオン状態に設定された場合、前記入力部からそれぞれ入力される、前記旋回駆動モータに対して設定された回転速度と、前記傾斜角度を変更するための回転速度とを加算して、その結果を前記第2モータコントローラに出力し、
前記第1スイッチによりオン状態に設定され、かつ、前記第2スイッチによりオフ状態に設定された場合、前記入力部から入力される前記旋回駆動モータに対して設定された回転速度と、前記補正速度演算手段で演算された補正速度とを加算して、その結果を前記第2モータコントローラに出力することを特徴とする装入装置。
【請求項8】
請求項1から請求項4の何れかに記載された装入装置の制御方法であって、
入力操作に対応する指令を出力可能な入力部から入力される、前記旋回駆動モータに対して設定された回転速度を表す指令に基づいて、前記旋回駆動モータを回転させる第1モータコントロール工程と、
前記入力部から入力される前記所定の角度と前記調整角度センサで検出された前記シュートの傾斜角度との偏差を演算する偏差演算工程と、
前記偏差演算工程で演算された偏差に基づいて、前記調整駆動モータの回転速度を変更するための補正速度を演算する補正速度演算工程と、
前記入力部からの指令に基づく回転速度と前記補正速度演算工程で演算された補正速度とを加算する加算工程と、
前記加算工程における加算で得られた回転速度で、前記調整駆動モータを回転させる第2モータコントロール工程と、を備え、
前記補正速度演算工程は、前記調整駆動モータの回転速度の変更後に前記偏差演算工程で新たに演算される偏差が、回転速度の変更前に演算された偏差よりも小さくなるような補正速度を演算することを特徴とする装入装置の制御方法。
【請求項9】
請求項8に記載された装入装置の制御方法において、
前記補正速度演算工程では、
前記偏差演算工程で演算された偏差が予め設定された閾角度以上の場合には、固定された値である最大補正速度を前記補正速度として演算し、
前記閾角度未満の場合には、前記偏差の大きさに応じて異なり、かつ、前記最大補正速度未満の値である偏差対応補正速度を前記補正速度として演算することを特徴とする装入装置の制御方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】

【図21】
【図22】
【図23】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【公開番号】特開2013−44026(P2013−44026A)
【公開日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願番号】特願2011−183015(P2011−183015)
【出願日】平成23年8月24日(2011.8.24)
【出願人】(306022513)新日鉄住金エンジニアリング株式会社 (897)
【出願人】(390022873)NSプラント設計株式会社 (275)
【Fターム(参考)】
【公開日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願日】平成23年8月24日(2011.8.24)
【出願人】(306022513)新日鉄住金エンジニアリング株式会社 (897)
【出願人】(390022873)NSプラント設計株式会社 (275)
【Fターム(参考)】
[ Back to top ]