
装着式動作補助装置
【課題】装着者の負担を軽減して作業効率を高める装着式動作補助装置を提供する。
【解決手段】装着者12は、装着式動作補助装置10が装着された状態で防護服14及び頭部保護具16を装着する。動作補助装置10は、腰支持体30に当該装着者12の上体を囲むように形成された上体フレーム210が取り付けられている。上体フレーム210は、当該装着者12の右側に位置する第1上フレーム220と、当該装着者12の左側に位置する第2上フレーム230と、第1上フレーム220と第2上フレーム230との間を連結する連結部240とを有する。防護服14を着用する際は、第1上フレーム220及び第2上フレーム230の肩支持部222、232が防護服14の肩部内側に当接する。従って、防護服14の質量は、腰支持体30に固定された上体フレーム210に支持され、装着者12には作用しない。
【解決手段】装着者12は、装着式動作補助装置10が装着された状態で防護服14及び頭部保護具16を装着する。動作補助装置10は、腰支持体30に当該装着者12の上体を囲むように形成された上体フレーム210が取り付けられている。上体フレーム210は、当該装着者12の右側に位置する第1上フレーム220と、当該装着者12の左側に位置する第2上フレーム230と、第1上フレーム220と第2上フレーム230との間を連結する連結部240とを有する。防護服14を着用する際は、第1上フレーム220及び第2上フレーム230の肩支持部222、232が防護服14の肩部内側に当接する。従って、防護服14の質量は、腰支持体30に固定された上体フレーム210に支持され、装着者12には作用しない。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は装着式動作補助装置に係り、特に防護服を装着した場合の動作支援を行えるよう構成された装着式動作補助装置に関する。
【背景技術】
【0002】
例えば、放射線や化学薬品などの作業者に悪影響を与えるような事故現場においては、作業者は環境から身体への影響を遮蔽する防護服を着用して作業を行うことになる(例えば、特許文献1参照)。このような防護服は、例えば、放射線を遮蔽する鉛又はタングステンなどの金属板が主に作業者の胴体を囲むように取り付けられている。また、防護服を形成する素材自体も厚手のものとなり、防護服の質量はおよそ20Kg〜30Kgにもなる。
【0003】
また、放射線に汚染された空気が充満する室内や化学薬品が流出し、有毒ガスが発生するような環境下で作業する場合には、防護服を着用した上、鉄製の酸素ボンベを背中に背負うことになる。空気ボンベは、空気の充填可能容量によって大きさが異なり、およそ5Kg〜8Kgの質量がある。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2001−296391号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
従来は、防護服や空気ボンベ等の装具の全質量が作業者に作用した状態であるので、作業者は防護服や空気ボンベの荷重を支えながら作業を行うことになり、体力の消耗が激しく、且つ体温上昇や発汗による脱水症状により、短時間(例えば10分〜20分程度)しか作業が行えないという問題があった。
【0006】
そこで、本発明は上記事情に鑑み、装具荷重による作業者の負担を軽減することで上記課題を解決した装着式動作補助装置の提供を目的とする。
【課題を解決するための手段】
【0007】
上記課題を解決するため、本発明は以下のような手段を有する。
(1)本発明は、装着者の腰に装着される腰支持体と、
該腰支持体の右側を支持するように結合された右脚補助部と、
前記腰支持体の左側を支持するように結合された左脚補助部と、
前記装着者の関節に対応するように前記右脚補助部及び前記左脚補助部に配された複数の駆動部と、
前記複数の駆動部を制御する制御部とを有する装着式動作補助装置において、
前記装着者の上体を囲むように形成された上体フレームを前記腰支持体に設け、
前記上体フレームは、当該装着者が装着する防護服の肩部を支持することを特徴とする。
(2)本発明の前記上体フレームは、前記装着者の上体と非接触となる形状に形成されていることを特徴とする。
(3)本発明の前記上体フレームは、金属パイプにより形成され、端部が前記腰支持体に固定された結合部に結合されることを特徴とする。
(4)本発明の前記上体フレームは、当該装着者の肩に対応する肩支持部を有し、前記防護服の肩部を前記肩支持部により支持することを特徴とする。
(5)本発明の前記上体フレームは、端部が前記腰支持体に対して回動可能に結合され、前記防護服の肩部の位置に応じて当接位置が調整されるように設けられたことを特徴とする。
(6)本発明の前記上体フレームの当該装着者の肩に対応する位置に、前記防護服の袖を支持するように構成された袖支持部を設けたことを特徴とする。
(7)本発明の前記上体フレームに、前記防護服の内側を冷却する冷却部を設けたことを特徴とする。
(8)本発明の前記上体フレームに、当該装着者の頭部に装着される頭部保護具を支持する頭部支持フレームを設けたことを特徴とする。
(9)本発明の前記上体フレームは、
当該装着者の右側に位置する第1フレームと、
当該装着者の左側に位置する第2フレームと、
前記第1フレームと前記第2フレームとを連結する連結部とを有することを特徴とする。
(10)本発明は、前記右脚補助部及び前記左脚補助部に各関節の回動角度を検出する角度センサを設け、
前記制御部は、前記角度センサにより検出された角度検出値に応じて前記駆動部の駆動トルクを制御することを特徴とする。
(11)本発明は、前記装着者の右脚、左脚の生体信号を検出する生体信号検出センサを設け、
前記制御部は、前記生体信号検出センサにより検出された生体信号検出値に応じて前記駆動部の駆動トルクを制御することを特徴とする。
【発明の効果】
【0008】
本発明によれば、装着者の上体を囲むように形成された上体フレームを腰支持体に設け、上体フレームが当該装着者が装着する防護服の肩部を支持するため、防護服の質量が装着者に作用せず、装着者の負担を軽減して体力の消耗を抑制できると共に、防護服を着用した状態での作業時間を延長することが可能になる。
【0009】
また、上体フレームに冷却部を設けるため、装着者の体温の上昇を抑制することで、装着者が脱水状態になることを防止でき、湿度の高い作業環境下での作業時間の延長が可能になる。
【0010】
また、上体フレームに当該装着者の頭部に装着される頭部保護具を支持する頭部支持フレームを設けるため、頭部保護具の質量が装着者に作用せず、装着者の頭部の負担を軽減して体力の消耗を抑制できると共に、防護服を着用した状態での作業時間を延長することが可能になる。
【0011】
また、制御部が装着者の動作に応じて駆動部の駆動トルクを制御するため、装着者が歩行する際にも防護服や頭部保護具の質量を感じることなく、歩行することが可能になり、体力の消耗を抑制できると共に、防護服を着用した状態での作業時間を延長することが可能になる。
【図面の簡単な説明】
【0012】
【図1】本発明による装着式動作補助装置の一実施例を用いて防護服及び頭部保護具を装着した状態を示す斜視図である。
【図2】装着式動作補助装置を斜め前側からみた斜視図である。
【図3】装着式動作補助装置を斜め後側からみた斜視図である。
【図4】装着式動作補助装置の脚部フレーム構造を示す斜視図である。
【図5】制御部のシステム構成を示すブロック図である。
【図6】各制御機器の接続を示すブロック図である。
【図7A】生体検出信号を用いて制御部が実行する制御処理を説明するためのフローチャートである。
【図7B】角度センサの検出信号を用いて制御部が実行する制御処理を説明するためのフローチャートである。
【図8】上体フレームの変形例1を示す斜視図である。
【図9】上体フレームの変形例2を示す斜視図である。
【図10】上体フレームの変形例3を示す斜視図である。
【図11】上体フレームの変形例4を示す斜視図である。
【図12】上体フレームの変形例5を示す斜視図である。
【図13】上体フレームの変形例6を示す斜視図である。
【図14】上体フレームの変形例7を示す斜視図である。
【発明を実施するための形態】
【0013】
以下、図面を参照して本発明を実施するための形態について説明する。
【実施例1】
【0014】
〔装着式動作補助装置と防護服との関係について〕
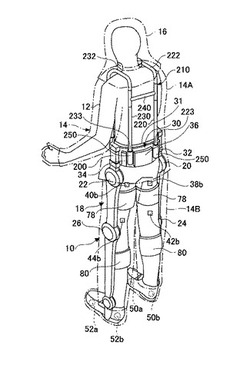
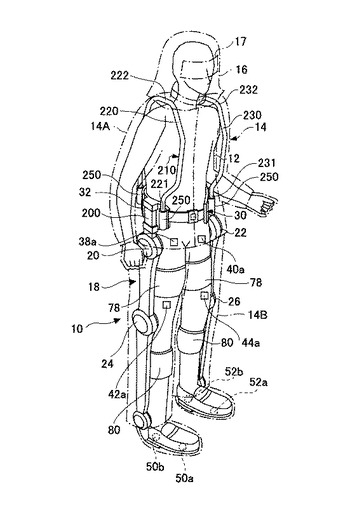
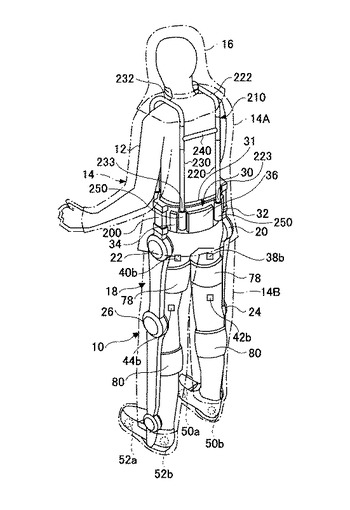
図1は本発明による装着式動作補助装置の一実施例を用いて防護服及び頭部保護具を装着した状態を示す斜視図である。図2は装着式動作補助装置を斜め前側からみた斜視図である。図3は装着式動作補助装置を斜め後側からみた斜視図である。
【0015】
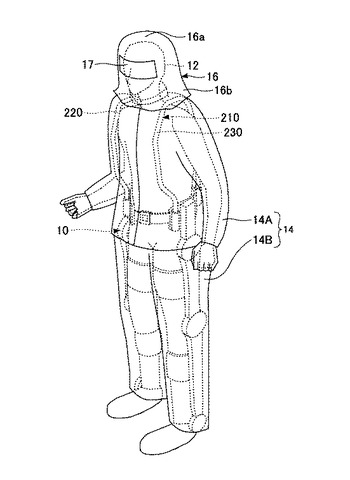
図1乃至図3に示されるように、装着者12は、装着式動作補助装置10(以下「動作補助装置」と称する)が装着された状態で防護服14及び頭部保護具16を装着する。防護服14は、装着者12の上体を保護する上着14Aと、装着者12の下半身を保護するズボン14Bとからなる。防護服14の上着14A及び頭部保護具16には、放射線を遮蔽する鉛又はタングステンからなる遮蔽材が縫合されている。尚、防護服14及び頭部保護具16は、動作補助装置10及び装着者12の動作を妨げないように装着者12の体格よりも大きいサイズのものを着用する。
【0016】
頭部保護具16は、帽子のように上方からかぶるように形成されており、頭部16aと、頭部16aの下部から周囲に延在する鍔部16bとを有する。頭部16aは、装着者12の頭の上方を囲むように形成されており、装着者12に接触していない。そして、頭部保護具16は、鍔部16bが防護服14の肩部に当接するため、頭部保護具16の質量が装着者12に作用しないように着用される。また、頭部16aの前側開口には、装着者12の視界を確保するため、透明部材による保護シールド17が設けられている。
【0017】
動作補助装置10は、腰支持体30に当該装着者12の上体を囲むように形成された上体フレーム210が取り付けられている。上体フレーム210は、例えば、ジュラルミンあるいはアルミニウム合金等の金属パイプからなり、装着者12の上半身と非接触となるように大きく湾曲するように形成されている。また、上体フレーム210は、当該装着者12の右側に位置する第1上フレーム220と、当該装着者12の左側に位置する第2上フレーム230と、第1上フレーム220と第2上フレーム230との間を連結する連結部240とを有する。
【0018】
第1上フレーム220及び第2上フレーム230は、当該装着者12の肩の上方を通過するように湾曲された肩支持部222、232を有する。また、第1上フレーム220及び第2上フレーム230の各端部221,223,231,233は、腰支持体30に形成された4箇所のフレーム結合部250に挿入結合される。
【0019】
腰支持体30は、後述するように外周側は金属材などの剛性を有する材料により形成され、その内側には弾性を有するクッション材が設けられている。
【0020】
防護服14を着用する際は、第1上フレーム220及び第2上フレーム230の肩支持部222、232が防護服14の肩部内側に当接する。従って、防護服14の質量は、腰支持体30に固定された上体フレーム210に支持され、装着者12には作用しない。
【0021】
さらに、腰支持体30は、後述するフレーム構造18により支持されている。そのため、動作補助装置10は、当該装置10及び防護服14の質量が装着者12の負担にならない構成になっている。よって、装着者12は、防護服14及び頭部保護具16を装着した場合でもこれらの質量を殆ど感じることなく、動作(作業)することができる。
【0022】
すなわち、動作補助装置10によれば、防護服14の質量が装着者12に作用せず、装着者12の負担を軽減して体力の消耗を抑制できると共に、防護服14を着用した状態での作業時間を延長することが可能になる。
〔装着式動作補助装置10の構成〕
図2及び図3に示されるように、動作補助装置10は、装着者の動作を支援(アシスト)する装置であり、脳からの信号により筋力を発生させる際に生じる生体信号(表面筋電位)及び/又は当該装着者の関節の動作角度や重心位置などを検出し、この検出信号に基づいて駆動部からの駆動力を付与するように作動する。
【0023】
動作補助装置10及び防護服14を装着した装着者12は、自らの意思で歩行動作を行うと、その際に発生した生体信号及び/又は当該装着者の膝関節の動作角度に応じた駆動トルクがアシスト力として動作補助装置10から付与され、例えば、通常歩行で必要とされる筋力の半分の力で歩行することが可能になる。従って、装着者12は、自身の筋力と駆動部(本実施例では、電動式の駆動モータを用いる)からの駆動トルクとの合力によって歩行することができる。
【0024】
その際、動作補助装置10は、歩行動作に伴う重心の移動に応じて付与されるアシスト力(モータトルク)が装着者12の意思を反映するように制御している。そのため、動作補助装置10の駆動部は、装着者12の意思に応じて動作をアシストするように制御される。
【0025】
また、動作補助装置10は、歩行動作以外にも、例えば、装着者12が椅子に座った状態から立ち上がる際の動作、あるいは立った状態から椅子に腰掛ける際の動作も補助することができる。さらには、装着者12が階段を上がったり、階段を下りる場合にもパワーアシストすることができる。特に装着者12が防護服14及び頭部保護具16を着用している、さらに背中に酸素ボンベを背負っている場合には、階段の上り動作や、椅子から立ち上がる動作を行うことが難しいが、装着者12は、自らの意思に応じて動作補助装置10から駆動トルクを付与されて動作することが可能になる。
【0026】
ここで、動作補助装置10の構成の一例について説明する。動作補助装置10は、装着者12に装着されるフレーム構造18に駆動部を設けたものである。駆動部としては、装着者12の右側股関節に位置する右腿駆動モータ20と、装着者12の左側股関節に位置する左腿駆動モータ22と、装着者12の右膝関節に位置する右膝駆動モータ24と、装着者12の左膝関節に位置する左膝駆動モータ26とを有する。これらの駆動モータ20,22,24,26は、制御ユニット(制御部)36からの制御信号により駆動トルクを制御されるDCモータまたはACモータなどからなる電動モータからなる。また、各駆動モータ20,22,24,26は、モータ回転を所定の減速比で減速する減速機構(駆動部に内蔵)を有しており、小型ではあるが十分な駆動力を付与することができる。また、駆動モータ20,22,24,26としては、設置スペースが小さく済むように薄型化された超音波モータを用いても良いのは勿論である。
【0027】
また、装着者12の腰の周囲に装着される腰支持体30には、駆動モータ20,22,24,26を駆動させるための電源として機能するバッテリ32,34が取り付けられている。バッテリ32、34は、充電式バッテリであり、装着者12の歩行動作を妨げないように左右に分散配置されている。
【0028】
また、装着者12の背面側となる腰支持部30の後側には、制御ユニット(制御部)36が取り付けられている。
【0029】
そして、動作補助装置10は、装着者12の右腿の動きに伴う生体電位を検出する生体信号検出センサ38a,38bと、装着者12の左腿の動きに伴う生体電位を検出する生体信号検出センサ40a,40bと、右膝の動きに関わる生体電位を検出する生体信号検出センサ42a,42bと、左膝の動きに関わる生体電位を検出する生体信号検出センサ44a,44bとを有する。
【0030】
これらの各生体信号検出センサ38a,38b,40a,40b,42a,42b,44a,44bは、筋電位信号や神経伝達信号などの生体電位信号(生体信号)を皮膚を介して検出する生体信号検出部であり、微弱電位を検出するための電極(図示せず)を有する。尚、本実施例では、各生体信号検出センサ38a,38b,40a,40b,42a,42b,44a,44bは、電極の周囲を覆う粘着シールにより装着者12の皮膚表面に貼着するように取り付けられる。
【0031】
人体においては、脳からの指令によって骨格筋を形成する筋肉の表面にシナプス伝達物質のアセチルコリンが放出される結果、筋線維膜のイオン透過性が変化して活動電位が発生する。そして、活動電位によって筋線維の収縮が発生し、筋力を発生させる。そのため、骨格筋の電位を検出することにより、歩行動作の際に生じる筋力を推測することが可能になり、この推測された筋力に基づく仮想トルクから歩行動作に必要なアシスト力(駆動トルク)を求めることが可能になる。
【0032】
従って、動作補助装置10では、これらの生体信号検出センサ38a,38b,40a,40b,42a,42b,44a,44bによって検出された生体信号に基づいて4個の駆動モータ20,22,24,26に供給する駆動電流を求め、この駆動電流で駆動モータ20,22,24,26を駆動することで、必要なアシスト力(駆動トルク)が付与されて装着者12の歩行動作を補助するように構成されている。
【0033】
また、歩行動作による重心移動をスムーズに行うため、脚の裏にかかる荷重を検出する必要がある。そのため、装着者12の左右脚の裏には、床反力センサ50a,50b,52a,52b(図2及び図3中、破線で示す)が設けられている。
【0034】
また、床反力センサ50aは、右脚前側の荷重に対する反力を検出し、床反力センサ50bは、右脚後側の荷重に対する反力を検出する。床反力センサ52aは、左脚前側の荷重に対する反力を検出し、床反力センサ52bは、左脚後側の荷重に対する反力を検出する。各床反力センサ50a,50b,52a,52bは、例えば、印加された荷重に応じた電圧を出力する圧電素子、又は、荷重に応じて静電容量が変化するセンサなどからなり、体重移動に伴う荷重変化、及び装着者12の脚と地面との接地の有無を夫々検出することができる。また、左右の足裏に係る荷重のバランスから、重心位置を求めることができる。
【0035】
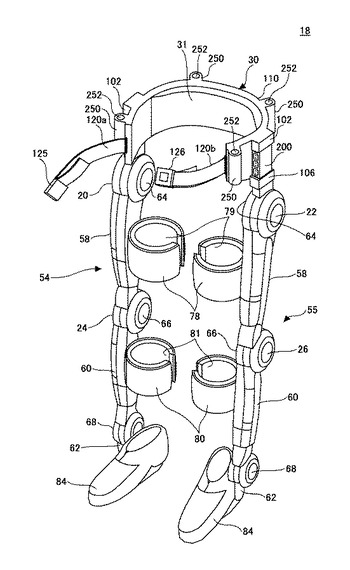
図4はフレーム構造18の装着前の状態を示す斜視図である。図4に示されるように、フレーム構造18は、装着者12の腰に装着される腰支持体30と、腰支持体30の右側から下方に設けられた右脚補助フレーム部54と、腰支持体30の左側から下方に設けられた左脚補助フレーム部55とを有する。
【0036】
腰支持体30は、例えば剛性を有するジュラルミンやアルミ合金などの金属材により形成された腰サポート部110を有しており、その背面内側には、装着者12の腰背面側との隙間をなくして密着するフィッティング部31が取り付けられている。また、腰支持体30の腰サポート部110の外側には、上体フレーム210を固定するための結合部250が一体的に設けられている。そして、フィッティング部31は、スポンジ又は低反発樹脂材などからなり、装着者12の腰背面側に当接して装着者12の腰を保護する。
【0037】
また、腰支持体30の腰サポート部110は、剛性を有するため、荷重を支えるためのフレームとして機能しており、外周の4箇所にはフレーム結合部250が一体的に設けられている。
【0038】
フレーム結合部250は、第1上フレーム220及び第2上フレーム230の各端部221,223,231,233が挿入される挿入孔252を有する。第1上フレーム220及び第2上フレーム230は、各端部221,223,231,233がフレーム結合部250の挿入孔252に挿入された後、その端部221,223,231,233の外周が各挿入孔252に溶接又はネジ等により固定又は締結される。
【0039】
右脚補助フレーム部54と左脚補助フレーム部55とは、左右対称に配置されており、腰支持体30に連結された腰部連結機構200と、腰部連結機構200より下方に延在し装着者12の腿側方に沿うように形成された第1下フレーム58と、第1下フレーム58より下方に延在し装着者12の脛側方に沿うように形成された第2下フレーム60と、装着者12の脚の裏(靴を履く場合には、靴底)が載置される第3下フレーム62とを有する。
【0040】
腰部連結機構200の下端と第1下フレーム58の上端との間には、軸受構造とされた第1関節64が介在しており、腰部連結機構200と第1下フレーム58とを回動可能に連結している。この第1関節64は、股関節と一致する高さ位置に設けられており、腰部連結機構200が第1関節64の支持側に締結され、第1下フレーム58が第1関節64の回動側に締結されている。また、第1関節64は、駆動モータ20,22が内蔵されたモータユニットを構成しており、第1関節64と駆動モータ20,22とは外観上一体化されている。
【0041】
また、第1下フレーム58の下端と第2下フレーム60の上端との間には、軸受構造とされた第2関節66が介在しており、第1下フレーム58と第2下フレーム60とを回動可能に連結している。この第2関節66は、膝関節と一致する高さ位置に設けられており、第1下フレーム58が第2関節66の支持側に締結され、第2下フレーム60が第2関節66の回動側に締結されている。また、第2関節66には、駆動モータ24,26が内蔵されたモータユニットを構成しており、第2関節66と駆動モータ24,26とは外観上一体化されている。
【0042】
また、第2下フレーム60の下端と第3下フレーム62の上端との間には、軸受構造とされた第3関節68が介在しており、第2下フレーム60と第3下フレーム62とを回動可能に連結している。そして、第3下フレーム62の内側には、装着者12の足を装着する靴84が固定されている。
【0043】
従って、第1下フレーム58及び第2下フレーム60は、腰支持体30に固定された腰部連結機構200に対して第1関節64及び第2関節66を回動支点とする歩行動作を行えるように取り付けられている。すなわち、第1下フレーム58及び第2下フレーム60は、装着者12の脚と同じ動作を行えるように構成されている。また、第3関節68は、装着者12の足首の側方に位置するように設けられている。そのため、靴84は、第3関節68の回動動作により歩行動作に応じて装着者12の足首と同じように床面(または地面)に対する角度が変化する。
【0044】
また、第1関節64及び第2関節66は、駆動モータ20,22,24,26の回転軸が、ギヤを介して被駆動側となる第1下フレーム58、第2下フレーム60に駆動トルクを伝達するように構成されている。
【0045】
さらに、駆動モータ20,22,24,26は、関節回動角度を検出する角度センサ(図6参照)を有する。この角度センサは、例えば、第1関節64及び第2関節66の関節角度に比例したパルス数をカウントするロータリエンコーダなどからなり、関節回動角度に応じたパルス数に対応した電気信号をセンサ出力として出力する。
【0046】
第1関節64の角度センサは、装着者12の股関節の関節角度に相当する腰支持体30と第1下フレーム58との間の回動角度を検出する。また、第2関節66の角度センサは、装着者12の膝関節の関節角度に相当する第1下フレーム58の下端と第2下フレーム60との間の回動角度を検出する。
【0047】
また、第1下フレーム58の長手方向の中間位置には、装着者12の腿に締結されるベルト状の腿締結部材78が取り付けられている。腿締結部材78の内面側には、装着者12の腿との隙間をなくして密着するフィッティング部79が取り付けられている。
【0048】
また、第2フレーム60の長手方向の中間位置には、装着者12の膝下の脛に締結されるベルト状の脛締結部材80が取り付けられている。脛締結部材80の内面側には、装着者12の脛との隙間をなくして密着するフィッティング部81が取り付けられている。
【0049】
従って、駆動モータ20,22,24,26で発生された駆動トルクは、ギヤを介して第1下フレーム58、第2下フレーム60に伝達され、さらに腿締結部材78、脛締結部材80を介して装着者12の脚にアシスト力として伝達される。
【0050】
また、第2下フレーム60の下端には、第3関節軸68を介して靴84が回動可能に連結されている。尚、第1下フレーム58及び第2下フレーム60は、装着者12の脚の長さに応じた長さに調整されている。
【0051】
各フレーム58,60,62は、夫々ジュラルミン等の軽量化された金属材の周囲を弾性を有する樹脂材で覆うように構成されており、腰支持体30及び上体フレーム210、バッテリ32,34、制御ユニット36等の質量を支えることができる。すなわち、動作補助装置10は、腰支持体30、バッテリ32,34、制御ユニット36及び上体フレーム210、防護服14、頭部保護具16の質量が装着者12に作用しないように構成されている。
【0052】
腰支持体30は、内周面中央に装着者12の腰後部(背面)に当接するフィッティング部31を有する金属材からなる腰サポート部110と、腰サポート部110の両端にヒンジを介して連結されたベルト120,121と、一方のベルト120の端部に取り付けられたバックル122と、他方のベルト121の端部に取り付けられた係止用金具124とを有する。
【0053】
腰支持体30を装着者12の腰に装着する際は、腰サポート部110の内側に設けられたフィッティング部31に腰の背面側を当接させた状態でバックル122の挿入口に係止用金具124を挿入して係止させる。そして、ベルト120,121の長さを装着者12のお腹の大きさに応じた長さに調整する。これにより、腰支持体30は、装着者12の腰回りの外周にほぼ密着した保持状態となる。尚、バックル122は、自動車のシートベルトと同様な構成になっており、係止解除部を操作することにより係止用金具124の係止を解除することができるように構成されている。
〔制御システムの構成〕
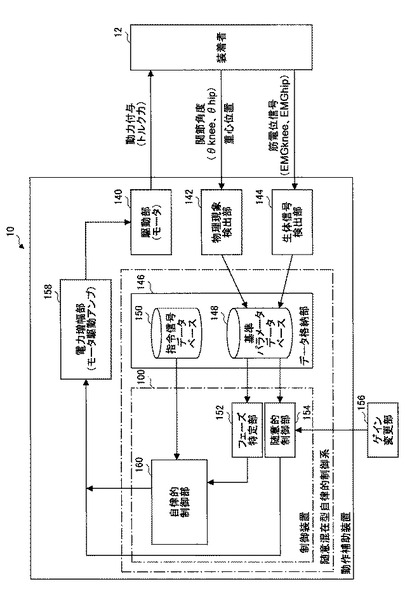
図5は制御部のシステム構成を示すブロック図である。図5に示されるように、動作補助装置10の制御系システムは、装着者12に対してアシスト力を付与する駆動部140と、装着者12の動作に応じた関節角度(物理現象)、及び、装着者12の重心位置(物理現象)を検出する物理現象検出部142と、装着者12の筋肉の活動に伴って発生する筋電位等を含む(生体信号)を検出する生体信号検出部144とを備えている。尚、上記駆動部140は、駆動モータ20,22,24,26からなる。物理現象検出部142は、上記関節回動角度を検出する角度センサ70,72,74,76(図6参照)及び床反力センサ50a,50b,52a,52bからなる。生体信号検出部144は、生体信号検出センサ38a,38b,40a,40b,42a,42b,44a,44bからなる。
【0054】
データ格納部146には、基準パラメータデータベース148と、指令信号データベース150とが格納されている。随
随意的制御部154は、生体信号検出部の検出信号に応じた指令信号を電力増幅部158に供給する。随意的制御部154は、生体信号検出部144に所定の指令関数f(t)またはゲインPを適用して指令信号を生成する。このゲインPは予め設定された値又は関数でも良く、ゲイン変更部156を介して調整することができる。
【0055】
また、装着者12の皮膚が汗で濡れることが予想される場合には、生体信号検出部144からの生体信号の入力が得られないときに、物理現象検出部142により検出された各データ(角度センサ70,72,74,76(図6参照)により検出された関節角度データ又は反力センサ50a,50b,52a,52bにより検出された重心移動データ)に基づいて各駆動モータ20,22,24,26の駆動トルクを制御する方法を選択することも可能である。
【0056】
物理現象検出部142によって検出された関節角度(θknee,θhip)や重心位置は、基準パラメータデータベース148に入力される。フェーズ特定部152では、物理現象検出部142により検出された関節角度及び重心位置を基準パラメータデータベース148に格納された基準パラメータの関節角度及び重心位置と比較することにより、装着者12の動作のフェーズを特定する。
【0057】
そして、自律的制御部160では、フェーズ特定部152により特定されたフェーズの制御データを得ると、このフェーズの制御データに応じた指令信号を生成し、この動力を駆動部140に発生させるための指令信号を電力増幅部158に供給する。
〔各制御機器の接続系統〕
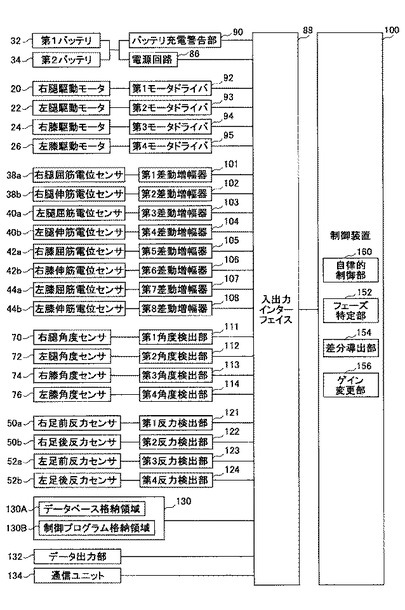
図6は各制御機器の接続を示すブロック図である。図6に示されるように、バッテリ32,34は、電源回路86に電源供給しており、電源回路86では所定電圧に変換して入出力インターフェイス88に定電圧を供給する。また、バッテリ32,34の充電容量は、バッテリ充電警告部90によって監視されており、バッテリ充電警告部90は、予め設定された残量に低下すると、警告を発して装着者12にバッテリ交換または充電を報知する。
【0058】
各駆動モータ20,22,24,26を駆動する第1乃至第4モータドライバ92〜95は、入出力インターフェイス88を介して制御装置100からの制御信号に応じた駆動電圧を増幅して各駆動モータ20,22,24,26に出力する。
【0059】
各生体信号検出センサ38a,38b,40a,40b,42a,42b,44a,44bから出力された生体電位信号の検出信号は、電力増幅部158の第1乃至第8差動増幅器101〜108によって増幅され、A/D変換器(図示せず)によってデジタル信号に変換されて入出力インターフェイス88を介して制御装置100に入力される。尚、装着者12の皮膚表面で検出される生体電位信号は、微弱である。そのため、第1乃至第8差動増幅器101〜108で例えば、30μVの検出信号をコンピュータが判別可能な3V程度に増幅するには、105倍となる100dBの増幅率が必要になる。
【0060】
また、角度センサ70,72,74,76から出力された角度検出信号は、夫々第1乃至第4角度検出部111〜114に入力される。第1乃至第4角度検出部111〜114は、ロータリエンコーダによって検出されたパルス数を角度に相当する角度データ値に変換しており、検出された回動角度データは入出力インターフェイス88を介して制御装置100に入力される。
【0061】
反力センサ50a,50b,52a,52bから出力された反力検出信号は、夫々第1乃至第4反力検出部121〜124に入力される。第1乃至第4反力検出部121〜124は、圧電素子によって検出された電圧を力に相当するデジタル値に変換しており、検出された反力データは入出力インターフェイス88を介して制御装置100に入力される。
【0062】
データ格納部146のメモリ130は、各データを格納する格納部であり、起立動作、歩行動作や着席動作など各動作パターン(タスク)毎に設定されたフェーズ単位の制御データが予め格納されたデータベース格納領域130Aと、各モータを制御するための制御プログラムが格納された制御プログラム格納領域130Bなどが設けられている。データベース格納領域130Aには、図5に示す基準パラメータデータベース148と指令信号データベース150が格納されている。
【0063】
また、制御装置100から出力された制御データは、入出力インターフェイス88を介してデータ出力部132あるいは通信ユニット134に出力され、例えば、モニタ(図示せず)に表示したり、あるいはデータ監視用コンピュータ(図示せず)などにデータ通信で転送することもできる。
【0064】
また、制御装置100は、前述した自律的制御部160と、フェーズ特定部152と、差分導出部154と、ゲイン変更部156とを備えている。
〔角度センサの検出信号を用いて制御装置100が実行する制御処理〕
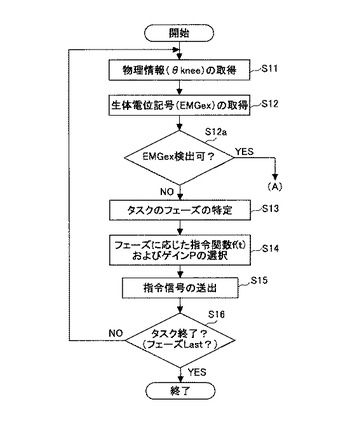
ここで、制御装置100が実行する制御処理の手順について図7Aのフローチャートを参照して説明する。図7Aに示されるように、制御装置100は、ステップS11(以下「ステップ」を省略する)で装着者12の動作に伴う物理現象検出部142(角度センサ70,72,74,76)により検出された関節角度(θknee,θhip)を取得する。次にS12に進み、生体信号検出部144(生体信号検出センサ38a,38b,40a,40b,42a,42b,44a,44b)によって検出された筋電位信号(EMGknee,EMGhip)を取得する。
【0065】
次のS12aでは、生体信号検出部144からの生体検出信号が検出できているか否かをチェックする。S12aにおいて、生体信号検出部144からの生体検出信号が検出できていない場合(NOの場合)(例えば、生体信号センサが装着者12の汗で剥がれている場合、あるいは生体信号センサを装着していない場合、生体信号検出部144からの筋電位信号が得られない。)、S13に進み、上記S11、S12で取得された関節角度(θknee,θhip)及び重心位置を基準パラメータデータベース148と照合して装着者12の各動作種別に対応するタスクのフェーズ(動作段階)を特定する。
【0066】
次のS14では、上記S13で特定されたフェーズ(動作段階)に応じた指令関数f(t)及びゲインPを選択する。
【0067】
そして、S15では、選択されたゲインPにより生成された指令信号(制御信号)が、電力増幅部158(モータドライバ92〜95)に供給される。これにより、駆動部140(駆動モータ20,22,24,26)は、駆動トルクを発生することになる。
【0068】
その結果、駆動部140(駆動モータ20,22,24,26)は、装着者12から検出した関節角度及び重心位置に基づいて選択されたフェーズに応じた駆動トルクを発生し、この駆動トルクを第1下フレーム58、第2下フレーム60及び第1締結ベルト78、第2締結ベルト80を介して装着者12の脚にアシスト力として伝達する。
【0069】
このように、装着者12の関節角度と重心位置に基づいてアシストを行うので、装着者12は、生体検出信号が得られなくても駆動部140(駆動モータ20,22,24,26)からの駆動トルクによるアシスト力を付与されて労力が軽減される。
【0070】
例えば、装着者12が防護服14及び頭部保護具16を着用した状態で階段を上る場合には、指令関数f(t)に応じた駆動力を発生させてアシストする。このような場合には、上の段についた脚は、股関節及び膝関節の角度が平地を歩行する場合よりも屈曲した状態で着地することになる、従って、例えば股関節及び/又は膝関節の屈折角度が80°〜100°の時に、床半力センサの検出値が所定の値以上になったら、階段を上るフェーズであると判断し、膝関節及び股関節の角度の伸展に合わせて駆動トルクを発生させる。
【0071】
また、階段を下りるフェーズ、立ち上がりのフェーズ、座りのフェーズであると判断した場合にも、所定の指令関数f(t)に従って駆動力を発生させてアシストをする。
【0072】
なお、装着者12が、平地を歩行している場合には負担が比較的小さいので、駆動部140(駆動モータ20,22,24,26)によるアシストが無くても作業効率は低下しない。従って、一般的な歩行のフェーズであると判断したときには、駆動部140(駆動モータ20,22,24,26)は装着者12の動作を阻害しないように、駆動モータ自体の粘性を補償するように駆動される。
【0073】
S16では、当該タスクの最終フェーズに対する制御処理が行われてかどうかを確認する。S16において、当該タスクの最終フェーズに対する制御処理が残っている場合には、上記S11に戻り、次のフェーズに対する制御処理(S11〜S16)を行う。また、S16において、当該タスクの最終フェーズに対する制御処理を行ったときは、今回の制御処理を終了する。
【0074】
このように、動作補助装置10は、上体フレーム210に防護服14及び頭部保護具16を着用した状態でも駆動部140(駆動モータ20,22,24,26)からの駆動トルクが第1下フレーム58、第2下フレーム60及び第1締結ベルト78、第2締結ベルト80を介して装着者12の脚に伝達されるため、装着者12は例えば階段を上る際でも通常の半分以下の力で動作することが可能になる。さらに、作業に必要な機材を上体フレーム210で支えることで装着者12は、余計な労力を使わずに作業効率を上げることが可能になる。
【0075】
このように、生体信号センサが装着者12の汗で剥がれているような場合、あるいは生体信号センサを装着していない場合には、角度センサ70,72,74,76によって検出された関節回動角度に基づいて装着者12が階段や段差を上っている場合に駆動部140(駆動モータ20,22,24,26)からの駆動トルクを付与することで装着者12の労力を軽減して、作業効率を高めることができる。また、制御装置100が装着者12の動作に応じて駆動部140の駆動トルクを制御するため、装着者12が歩行する際にも防護服14や頭部保護具16の質量を感じることなく、歩行することが可能になり、体力の消耗を抑制できると共に、防護服14を着用した状態での作業時間を延長することが可能になる。
〔生体信号を用いて制御装置100が実行する制御処理〕
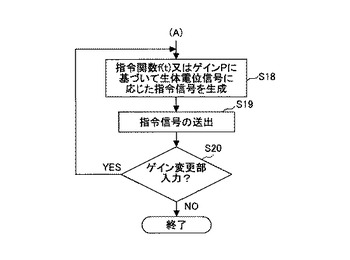
図7Bは生体信号センサの検出信号を用いて制御部が実行する制御処理を説明するためのフローチャートである。図7Bに示されるように、S12aにおいて、例えば、装着者12が生体信号センサを適正に装着している場合、生体信号検出部144からの生体電位信号を得ることができる。その場合(YESの場合)、S18に進み指令関数f(t)及びゲインPに基づいて、生体電位信号に応じた指令信号を生成する。
【0076】
次のS19では、指令信号を電力増幅部158(モータドライバ92〜95)に送出する。これにより、装着者12には、生体検出信号に応じたアシスト力を付与されて労力が軽減される。
【0077】
S20では、ゲイン変更部による入力があったかどうか確認する。S20において、ゲイン変更部による入力があった場合には、上記S18に戻り、変更後のゲインPにより制御処理(S18〜S20)を行う。また、S20において、ゲイン変更部による入力が無かったときは、今回の制御処理を終了する。
【0078】
このように、生体信号センサにより生体電位信号が検出できる場合には、生体電位信号に基づいて装着者12の意思に応じて駆動トルクを付与することで装着者12の労力を軽減して、作業効率を高めることができる。また、制御装置100が装着者12の動作に応じて駆動部140の駆動トルクを制御するため、装着者12が歩行する際にも防護服14や頭部保護具16の質量を感じることなく、歩行することが可能になり、体力の消耗を抑制できると共に、防護服14を着用した状態での作業時間を延長することが可能になる。
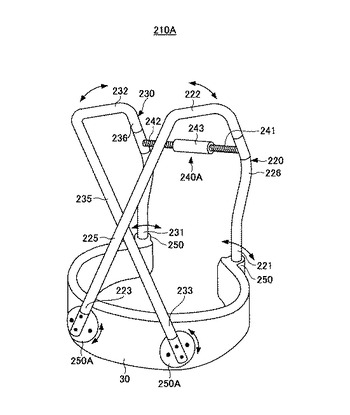
〔変形例1〕
図8は上体フレームの変形例2を示す斜視図である。図8に示されるように、変形例1の上体フレーム210Aは、第1上フレーム220及び第2上フレーム230の後側フレーム225,235がX字状に交差している。後側フレーム225,235は、端部223,233が円形のフレーム結合部250Aに結合されている。フレーム結合部250Aは、腰支持体30の外周面に回動可能に連結された回動部251と、回動部251に固定されたパイプ嵌合部252とを有する。
【0079】
また、パイプ嵌合部252には、第1上フレーム220及び第2上フレーム230の端部221,223,231,233が嵌合固定されている。そして、回動部251は、腰支持体30の外周面に対して回動することにより、パイプ嵌合部252及び第1上フレーム220及び第2上フレーム230の端部221,223,231,233を回動させることが可能である。
【0080】
さらに、第1上フレーム220及び第2上フレーム230の前側フレーム226,236間には、連結部240Aが連結されている。連結部240Aは、前側フレーム226より水平方向に延在する右ねじ部241と、前側フレーム236より水平方向に延在する左ねじ部242と、一端が右ねじ部241に螺合され他端が左ねじ部242が螺合された雌ねじ部243とを有する。
【0081】
すなわち、連結部240Aは、ターンバックルと同じ構造であり、逆ねじに形成された右ねじ部241及び左ねじ部242に螺合された雌ねじ部243を右回り又は左回りに回動させることによって、右ねじ部241及び左ねじ部242が雌ねじ部243の内側に移動するか、あるいは雌ねじ部243の外側に移動する。これにより、第1上フレーム220及び第2上フレーム230は、左右方向の離間距離が調整されると共に、フレーム結合部250Aが回動して肩支持部222、232の高さ位置及び左右方向位置が調整される。
【0082】
例えば、装着者12の体格が各人によって異なる場合、上記雌ねじ部243を回動操作することで、肩支持部222、232の高さ位置及び左右方向位置を当該装着者12の肩の位置に応じて適宜調整することができる。尚、連結部240Aは、装着者12自身が操作して腰支持体30に対する肩支持部222、232の位置を調整することが可能であるので、防護服14が第1上フレーム220及び第2上フレーム230に支持された状態であっても簡単に肩支持部222、232の高さ位置及び左右方向位置を調整できる。
【0083】
また、連結部240Aは、前側フレーム226,236の左右方向の離間距離及び後側フレーム225,235の回動角度を調整する調整機構であり、調整終了後は、第1上フレーム220及び第2上フレーム230の調整位置を固定するロック機構としても機能する。
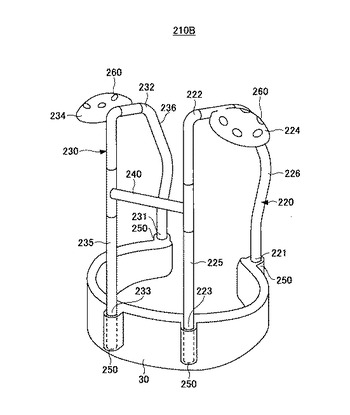
〔変形例2〕
図9は上体フレームの変形例2を示す斜視図である。図9に示されるように、変形例2の上体フレーム210Bは、第1上フレーム220及び第2上フレーム230の肩支持部222、232から左右方向に突出する肩保護部224,234が設けられている。肩保護部224,234は、装着者12の肩の上方に離間する高さに配され、上面側には複数の永久磁石260が埋設されている。
【0084】
そして、防護服14の肩部内側には、鉄板などの磁性材を取り付ける。そのため、防護服14を着用すると、肩保護部224,234の上面側に配された複数の永久磁石260の磁力によって防護服14の肩部が吸着される。
【0085】
従って、防護服14は、肩部が装着者12に接触していなくてもずれることが防止され、肩保護部224,234の上面側に配された複数の永久磁石260の磁力によって保持されるため、例えば荷物を肩に背負う場合でも肩部がずれないので、作業を支障なく行える。
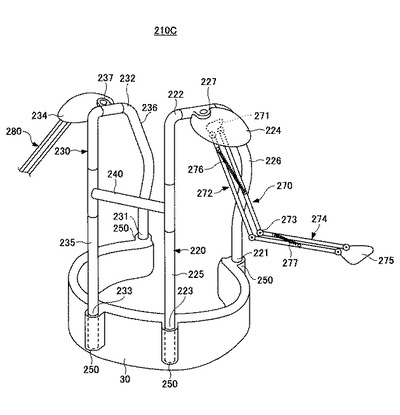
〔変形例3〕
図10は上体フレームの変形例3を示す斜視図である。図10に示されるように、変形例3の上体フレーム210Cは、第1上フレーム220及び第2上フレーム230の肩支持部222、232から左右方向に突出する肩保護部224,234が設けられている。肩保護部224,234は、肩保護部224,234に固定された支持部227,237により、前後方向に回動可能に支持され、且つ左右方向に延在する第1アーム270、第2アーム280を支持している。
【0086】
第1アーム270、第2アーム280は、防護服14の両袖に挿入され、防護服14の各袖を上方に持ち上げるようにバネ力を作用させるリンク機構からなる構成である。第1アーム270と第2アーム280とは、同一構成であるので、以下、第1アーム270の構成について説明する。
【0087】
第1アーム270は、肩保護部224の下面側に連結された第1関節271により上下方向に回動可能に支持された第1リンク機構272と、第1リンク機構272の先端の第2関節273により上下方向に回動可能に支持された第2リンク機構274とを有する。また、第2リンク機構274の先端には、防護服14の袖を上方に持ち上げる当接片275が支持されている。
【0088】
第1リンク機構272及び第2リンク機構274は、2本平行リンクをコイルバネ276、277のバネ力によりバランスさせて静止するように構成されている。従って、第1アーム270、第2アーム280は、装着者12が上体フレーム210Cの上から着用された防護服14の袖に通されると、防護服14の袖を上方に持ち上げることができると共に、装着者12の腕の動きに応じて上下方向に回動するため、装着者12の作業を妨げずに防護服14の袖の荷重を支えることができる。よって、上体フレーム210Cは、装着者12の腕の動きを規制することなく、装着者12の労力を軽減することが可能になる。
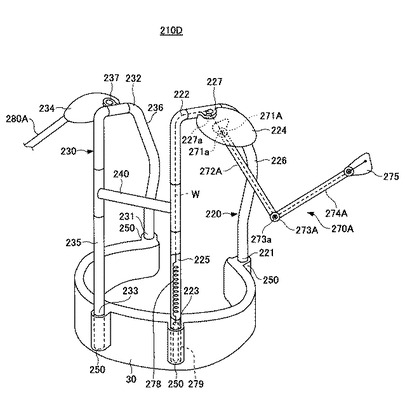
〔変形例4〕
図11は上体フレームの変形例4を示す斜視図である。図11に示されるように、変形例4の上体フレーム210Dは、肩保護部224,234に固定された支持部227,237により、前後方向に回動可能に支持され、且つ左右方向に延在する第1アーム270A、第2アーム280Aを支持している。第1アーム270Aと第2アーム280Aとは、同一構成であるので、以下、第1アーム270Aの構成について説明する。
【0089】
第1アーム270Aは、中空の金属パイプよりなり、内部の中空部にはワイヤWが挿通されている。また、支持部227及び第1アーム270A、第2アーム280Aの各関節271A,273Aには、ワイヤWが巻き掛けされるプーリ227a、271a、273aが収納されている。
【0090】
また、ワイヤWの先端は当接片275に結合され、ワイヤWの基端はコイルバネ278の上端に結合されている。さらに、コイルバネ278の下端は、金属ロッド279に結合されている。金属ロッド279は、第1上フレーム220の端部223内に摺動可能に挿通されており、上下方向の係止位置を調整可能に取り付けられている。従って、金属ロッド279の上下方向の係止位置を調整することにより、コイルバネ278のバネ力を調整することができる。
【0091】
従って、第1アーム270A、第2アーム280Aは、装着者12が上体フレーム210Dの上から着用された防護服14の袖に通されると、防護服14の袖を上方に持ち上げることができると共に、装着者12の腕の動きに応じて上下方向に回動するため、装着者12の作業を妨げずに防護服14の袖の荷重を支えることができる。よって、上体フレーム210Dは、装着者12の腕の動きを規制することなく、装着者12の労力を軽減することが可能になる。また、上体フレーム210Dは、コイルバネ278が内部に挿入されて外部に露出しない構成であるので、装着者12が動作する際にコイルバネ278に接触せず、作業の妨げにならないように構成されている。
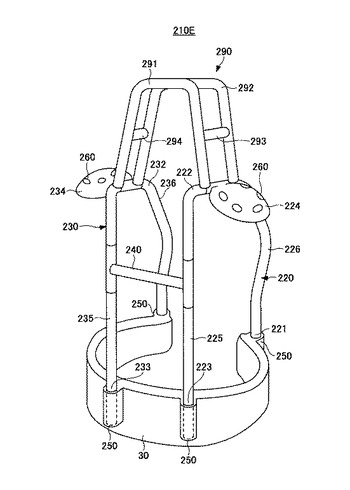
〔変形例5〕
図11は上体フレームの変形例5を示す斜視図である。図11に示されるように、変形例4の上体フレーム210Eは、第1上フレーム220及び第2上フレーム230の肩支持部222、232の上方に頭部保護フレーム290が溶接により固定されている。
【0092】
頭部保護フレーム290は、装着者12の頭部を跨ぐように形成された2本の保護パイプ291,292と、保護パイプ291,292間を連結する連結部293,294とを有する。
また、頭部保護フレーム290の保護パイプ291,292は、左右の支持部222、232を跨ぐように台形状に形成されており、頭部保護具16の内側形状に対応している。そのため、頭部保護具16を頭部保護フレーム290に被せることで、頭部保護部16の質量は、頭部保護フレーム290によって支えられる。これにより、装着者12は、頭部保護部16の質量を全く気にせずに作業を行うことができ、よって、上体フレーム210Eは、装着者12の頭部の負担を軽減して、装着者12の労力を軽減することが可能になる。また、頭部保護具16の質量が装着者12に作用しないため、装着者12の頭部の負担を軽減して体力の消耗を抑制できると共に、防護服14を着用した状態での作業時間を延長することが可能になる。
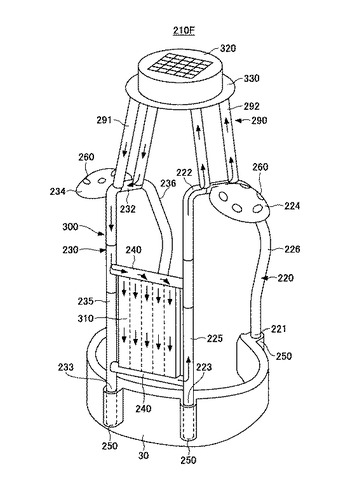
〔変形例6〕
図13は上体フレームの変形例6を示す斜視図である。図13に示されるように、上体フレーム210Fは、防護服14の内側から装着者12を冷却する冷却ユニット300(冷却部)が設けられている。
【0093】
冷却ユニット300は、装着者12の背中に対向するように配された冷却袋310と、冷却袋310に冷却液を供給する冷却用熱交換器320とを有する。冷却袋310は、樹脂製の袋からなり、内部に複数の流路が格子状に形成されている。また、冷却袋310は、後側フレーム225,235と、後側フレーム225,235間を連結する連結部240とによって画成された空間内に収納されている。そのため、冷却袋310の内側は、装着者12の背中に対向する位置に保持される。
【0094】
冷却用熱交換器320は、例えば印加電圧によって温度を変化させる特性をもつペルチェ素子等からなり、頭部保護フレーム290に支持されたベース330に搭載されている。また、冷却用熱交換器320には、冷却液を循環させるためのポンプを有している。
【0095】
頭部保護フレーム290及び後側フレーム225,235及び連結部240は、中空パイプにより形成されており、内部の中空部分が冷却液の流路になっている。連結部240は、冷却袋310の流入口、流出口に接続されており、冷却用熱交換器320から送液された冷却液を冷却袋310に供給する。また、冷却袋310から排出された冷却液は、後側フレーム235及び頭部保護フレーム290の内部に形成された流路を通過して冷却用熱交換器320に戻されて再度冷却される。
【0096】
また、頭部保護フレーム290及び後側フレーム225,235及び連結部240も冷却液の循環により冷却されるため、冷却袋310と共に、防護服14の内側を冷却することができる。
【0097】
冷却用熱交換器320は、動作補助装置10のバッテリ32,34からの電源供給により作動する。また、冷却用熱交換器320は、防護服14の内部温度を温度センサにより測定し、測定された温度が所定以上に上昇した場合に冷却液を循環させるように制御される。
【0098】
これにより、防護服14の内側の温度が作業に適した温度を保つように温度制御することが可能になり、装着者12が温度上昇により疲労することを防止できる。よって、上体フレーム210Fは、装着者12の体温の上昇を抑制して、装着者12の疲労を軽減することが可能になる。
【0099】
また、装着者12の体温の上昇を抑制することで、装着者が脱水状態になることを防止でき、湿度の高い作業環境下での作業時間の延長が可能になる。
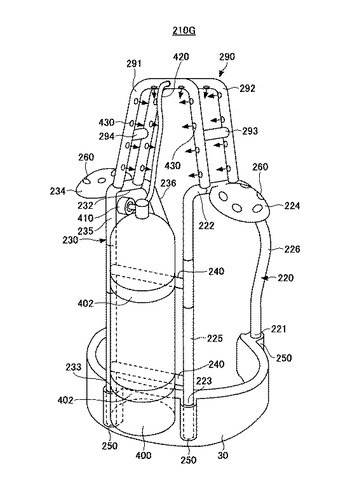
〔変形例7〕
図14は上体フレームの変形例7を示す斜視図である。図14に示されるように、変形例7の上体フレーム210Gは、第1上フレーム220及び第2上フレーム230の肩支持部222、232の上方に頭部保護フレーム290が溶接により固定されている。また、上体フレーム210Fの背側の2本の連結部240には、空気ボンベ400がベルト402により取り付けられている。
【0100】
空気ボンベ400は、金属または複合材により形成された容器であり、内部には圧縮空気が充填されている。また、空気ボンベ400の上端には、電磁弁410が取り付けられている。
【0101】
さらに、電磁弁410は、空気チューブ420を介して装着者12が顔に装着するマスクに接続され、且つ頭部保護フレーム290にも接続されている。頭部保護フレーム290の保護パイプ291,292の内側(装着者12の頭部に対向する側)に複数の空気噴射孔430が設けられている。
【0102】
複数の空気噴射孔430は、電磁弁410の開弁により圧縮空気が供給され、装着者12の頭部に空気を噴射して頭部を空冷する冷却部を構成している。
【0103】
また、電磁弁410は、頭部保護具16の内部温度を温度センサにより測定し、測定された温度が所定以上に上昇した場合に空気を噴射させるように制御される。
【0104】
これにより、頭部保護具16の内側の温度が作業に適した温度を保つように温度制御することが可能になり、装着者12が温度上昇により疲労することを防止できる。また、頭部保護具16の内部は、首から防護服14の内側にも連通されているので、複数の空気噴射孔430から噴射された空気は、装着者12の頭部を冷却した後、防護服14の内側にも流入して防護服14全体を冷却する。よって、上体フレーム210Fは、装着者12の体温の上昇を抑制して、装着者12の疲労を軽減することが可能になる。
【産業上の利用可能性】
【0105】
尚、防護服としては、放射線や化学薬品に限らず、例えば、火災やガスなどから防護するものも含まれる。
【0106】
また、防護服は、上着とズボンとが分かれるタイプでも良いし、一体となったつなぎでも良い。
【符号の説明】
【0107】
10 装着式動作補助装置
12 装着者
14 防護服
14A 上着
14B ズボン
16 頭部保護具
16a 頭部
16b 鍔部
17 保護シールド
18 フレーム構造
20,22,24,26 駆動モータ
30 腰支持体
32,34 バッテリ
31 フィッティング部
36 制御ユニット(制御部)
38a,38b,40a,40b,42a,42b,44a,44b 生体信号検出センサ
50a,50b,52a,52b 床反力センサ
54 右脚補助フレーム部
55 左脚補助フレーム部
58 第1下フレーム
60 第2下フレーム
62 第3下フレーム
64 第1関節
66 第2関節
70,72,74,76 角度センサ
78 腿締結部材
79、81 フィッティング部
80 脛締結部材
84 靴
86 電源回路
88 入出力インターフェイス
90 バッテリ充電警告部
92〜95 モータドライバ
100 制御装置
101〜108 差動増幅器
110 腰サポート部
111〜114 角度検出部
120、121 ベルト
121〜124 反力検出部
130 メモリ
130A データベース格納領域
130B 制御プログラム格納領域
132 データ出力部
134 通信ユニット
140 駆動部
142 物理現象検出部
144 生体信号検出部
146 データ格納部
148 基準パラメータデータベース
150 指令信号データベース
152 フェーズ特定部
154 差分導出部
156 ゲイン変更部
158 電力増幅部
160 自律的制御部
200 腰部連結機構
210、210A〜210G 上体フレーム
220 第1上フレーム
221,223,231,233 端部
222、232 肩支持部
224,234 肩保護部
225,235 後側フレーム
230 第2上フレーム
240、240A 連結部
250、250A フレーム結合部
251 回動部
252 パイプ嵌合部
241 右ねじ部
242 左ねじ部
243 雌ねじ部
260 永久磁石
270、270A 第1アーム
280、280A 第2アーム
271、271A 第1関節
271a、273a プーリ
272 第1リンク機構
273、273A 第2関節
274 第2リンク機構
275 当接片
278 コイルバネ
279 金属ロッド
290 頭部保護フレーム
291,292 保護パイプ
293,294 連結部
300 冷却ユニット
310 冷却袋
320 冷却用熱交換器
330 ベース
400 空気ボンベ
410 電磁弁
420 空気チューブ
430 空気噴射孔
W ワイヤ
【技術分野】
【0001】
本発明は装着式動作補助装置に係り、特に防護服を装着した場合の動作支援を行えるよう構成された装着式動作補助装置に関する。
【背景技術】
【0002】
例えば、放射線や化学薬品などの作業者に悪影響を与えるような事故現場においては、作業者は環境から身体への影響を遮蔽する防護服を着用して作業を行うことになる(例えば、特許文献1参照)。このような防護服は、例えば、放射線を遮蔽する鉛又はタングステンなどの金属板が主に作業者の胴体を囲むように取り付けられている。また、防護服を形成する素材自体も厚手のものとなり、防護服の質量はおよそ20Kg〜30Kgにもなる。
【0003】
また、放射線に汚染された空気が充満する室内や化学薬品が流出し、有毒ガスが発生するような環境下で作業する場合には、防護服を着用した上、鉄製の酸素ボンベを背中に背負うことになる。空気ボンベは、空気の充填可能容量によって大きさが異なり、およそ5Kg〜8Kgの質量がある。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2001−296391号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
従来は、防護服や空気ボンベ等の装具の全質量が作業者に作用した状態であるので、作業者は防護服や空気ボンベの荷重を支えながら作業を行うことになり、体力の消耗が激しく、且つ体温上昇や発汗による脱水症状により、短時間(例えば10分〜20分程度)しか作業が行えないという問題があった。
【0006】
そこで、本発明は上記事情に鑑み、装具荷重による作業者の負担を軽減することで上記課題を解決した装着式動作補助装置の提供を目的とする。
【課題を解決するための手段】
【0007】
上記課題を解決するため、本発明は以下のような手段を有する。
(1)本発明は、装着者の腰に装着される腰支持体と、
該腰支持体の右側を支持するように結合された右脚補助部と、
前記腰支持体の左側を支持するように結合された左脚補助部と、
前記装着者の関節に対応するように前記右脚補助部及び前記左脚補助部に配された複数の駆動部と、
前記複数の駆動部を制御する制御部とを有する装着式動作補助装置において、
前記装着者の上体を囲むように形成された上体フレームを前記腰支持体に設け、
前記上体フレームは、当該装着者が装着する防護服の肩部を支持することを特徴とする。
(2)本発明の前記上体フレームは、前記装着者の上体と非接触となる形状に形成されていることを特徴とする。
(3)本発明の前記上体フレームは、金属パイプにより形成され、端部が前記腰支持体に固定された結合部に結合されることを特徴とする。
(4)本発明の前記上体フレームは、当該装着者の肩に対応する肩支持部を有し、前記防護服の肩部を前記肩支持部により支持することを特徴とする。
(5)本発明の前記上体フレームは、端部が前記腰支持体に対して回動可能に結合され、前記防護服の肩部の位置に応じて当接位置が調整されるように設けられたことを特徴とする。
(6)本発明の前記上体フレームの当該装着者の肩に対応する位置に、前記防護服の袖を支持するように構成された袖支持部を設けたことを特徴とする。
(7)本発明の前記上体フレームに、前記防護服の内側を冷却する冷却部を設けたことを特徴とする。
(8)本発明の前記上体フレームに、当該装着者の頭部に装着される頭部保護具を支持する頭部支持フレームを設けたことを特徴とする。
(9)本発明の前記上体フレームは、
当該装着者の右側に位置する第1フレームと、
当該装着者の左側に位置する第2フレームと、
前記第1フレームと前記第2フレームとを連結する連結部とを有することを特徴とする。
(10)本発明は、前記右脚補助部及び前記左脚補助部に各関節の回動角度を検出する角度センサを設け、
前記制御部は、前記角度センサにより検出された角度検出値に応じて前記駆動部の駆動トルクを制御することを特徴とする。
(11)本発明は、前記装着者の右脚、左脚の生体信号を検出する生体信号検出センサを設け、
前記制御部は、前記生体信号検出センサにより検出された生体信号検出値に応じて前記駆動部の駆動トルクを制御することを特徴とする。
【発明の効果】
【0008】
本発明によれば、装着者の上体を囲むように形成された上体フレームを腰支持体に設け、上体フレームが当該装着者が装着する防護服の肩部を支持するため、防護服の質量が装着者に作用せず、装着者の負担を軽減して体力の消耗を抑制できると共に、防護服を着用した状態での作業時間を延長することが可能になる。
【0009】
また、上体フレームに冷却部を設けるため、装着者の体温の上昇を抑制することで、装着者が脱水状態になることを防止でき、湿度の高い作業環境下での作業時間の延長が可能になる。
【0010】
また、上体フレームに当該装着者の頭部に装着される頭部保護具を支持する頭部支持フレームを設けるため、頭部保護具の質量が装着者に作用せず、装着者の頭部の負担を軽減して体力の消耗を抑制できると共に、防護服を着用した状態での作業時間を延長することが可能になる。
【0011】
また、制御部が装着者の動作に応じて駆動部の駆動トルクを制御するため、装着者が歩行する際にも防護服や頭部保護具の質量を感じることなく、歩行することが可能になり、体力の消耗を抑制できると共に、防護服を着用した状態での作業時間を延長することが可能になる。
【図面の簡単な説明】
【0012】
【図1】本発明による装着式動作補助装置の一実施例を用いて防護服及び頭部保護具を装着した状態を示す斜視図である。
【図2】装着式動作補助装置を斜め前側からみた斜視図である。
【図3】装着式動作補助装置を斜め後側からみた斜視図である。
【図4】装着式動作補助装置の脚部フレーム構造を示す斜視図である。
【図5】制御部のシステム構成を示すブロック図である。
【図6】各制御機器の接続を示すブロック図である。
【図7A】生体検出信号を用いて制御部が実行する制御処理を説明するためのフローチャートである。
【図7B】角度センサの検出信号を用いて制御部が実行する制御処理を説明するためのフローチャートである。
【図8】上体フレームの変形例1を示す斜視図である。
【図9】上体フレームの変形例2を示す斜視図である。
【図10】上体フレームの変形例3を示す斜視図である。
【図11】上体フレームの変形例4を示す斜視図である。
【図12】上体フレームの変形例5を示す斜視図である。
【図13】上体フレームの変形例6を示す斜視図である。
【図14】上体フレームの変形例7を示す斜視図である。
【発明を実施するための形態】
【0013】
以下、図面を参照して本発明を実施するための形態について説明する。
【実施例1】
【0014】
〔装着式動作補助装置と防護服との関係について〕
図1は本発明による装着式動作補助装置の一実施例を用いて防護服及び頭部保護具を装着した状態を示す斜視図である。図2は装着式動作補助装置を斜め前側からみた斜視図である。図3は装着式動作補助装置を斜め後側からみた斜視図である。
【0015】
図1乃至図3に示されるように、装着者12は、装着式動作補助装置10(以下「動作補助装置」と称する)が装着された状態で防護服14及び頭部保護具16を装着する。防護服14は、装着者12の上体を保護する上着14Aと、装着者12の下半身を保護するズボン14Bとからなる。防護服14の上着14A及び頭部保護具16には、放射線を遮蔽する鉛又はタングステンからなる遮蔽材が縫合されている。尚、防護服14及び頭部保護具16は、動作補助装置10及び装着者12の動作を妨げないように装着者12の体格よりも大きいサイズのものを着用する。
【0016】
頭部保護具16は、帽子のように上方からかぶるように形成されており、頭部16aと、頭部16aの下部から周囲に延在する鍔部16bとを有する。頭部16aは、装着者12の頭の上方を囲むように形成されており、装着者12に接触していない。そして、頭部保護具16は、鍔部16bが防護服14の肩部に当接するため、頭部保護具16の質量が装着者12に作用しないように着用される。また、頭部16aの前側開口には、装着者12の視界を確保するため、透明部材による保護シールド17が設けられている。
【0017】
動作補助装置10は、腰支持体30に当該装着者12の上体を囲むように形成された上体フレーム210が取り付けられている。上体フレーム210は、例えば、ジュラルミンあるいはアルミニウム合金等の金属パイプからなり、装着者12の上半身と非接触となるように大きく湾曲するように形成されている。また、上体フレーム210は、当該装着者12の右側に位置する第1上フレーム220と、当該装着者12の左側に位置する第2上フレーム230と、第1上フレーム220と第2上フレーム230との間を連結する連結部240とを有する。
【0018】
第1上フレーム220及び第2上フレーム230は、当該装着者12の肩の上方を通過するように湾曲された肩支持部222、232を有する。また、第1上フレーム220及び第2上フレーム230の各端部221,223,231,233は、腰支持体30に形成された4箇所のフレーム結合部250に挿入結合される。
【0019】
腰支持体30は、後述するように外周側は金属材などの剛性を有する材料により形成され、その内側には弾性を有するクッション材が設けられている。
【0020】
防護服14を着用する際は、第1上フレーム220及び第2上フレーム230の肩支持部222、232が防護服14の肩部内側に当接する。従って、防護服14の質量は、腰支持体30に固定された上体フレーム210に支持され、装着者12には作用しない。
【0021】
さらに、腰支持体30は、後述するフレーム構造18により支持されている。そのため、動作補助装置10は、当該装置10及び防護服14の質量が装着者12の負担にならない構成になっている。よって、装着者12は、防護服14及び頭部保護具16を装着した場合でもこれらの質量を殆ど感じることなく、動作(作業)することができる。
【0022】
すなわち、動作補助装置10によれば、防護服14の質量が装着者12に作用せず、装着者12の負担を軽減して体力の消耗を抑制できると共に、防護服14を着用した状態での作業時間を延長することが可能になる。
〔装着式動作補助装置10の構成〕
図2及び図3に示されるように、動作補助装置10は、装着者の動作を支援(アシスト)する装置であり、脳からの信号により筋力を発生させる際に生じる生体信号(表面筋電位)及び/又は当該装着者の関節の動作角度や重心位置などを検出し、この検出信号に基づいて駆動部からの駆動力を付与するように作動する。
【0023】
動作補助装置10及び防護服14を装着した装着者12は、自らの意思で歩行動作を行うと、その際に発生した生体信号及び/又は当該装着者の膝関節の動作角度に応じた駆動トルクがアシスト力として動作補助装置10から付与され、例えば、通常歩行で必要とされる筋力の半分の力で歩行することが可能になる。従って、装着者12は、自身の筋力と駆動部(本実施例では、電動式の駆動モータを用いる)からの駆動トルクとの合力によって歩行することができる。
【0024】
その際、動作補助装置10は、歩行動作に伴う重心の移動に応じて付与されるアシスト力(モータトルク)が装着者12の意思を反映するように制御している。そのため、動作補助装置10の駆動部は、装着者12の意思に応じて動作をアシストするように制御される。
【0025】
また、動作補助装置10は、歩行動作以外にも、例えば、装着者12が椅子に座った状態から立ち上がる際の動作、あるいは立った状態から椅子に腰掛ける際の動作も補助することができる。さらには、装着者12が階段を上がったり、階段を下りる場合にもパワーアシストすることができる。特に装着者12が防護服14及び頭部保護具16を着用している、さらに背中に酸素ボンベを背負っている場合には、階段の上り動作や、椅子から立ち上がる動作を行うことが難しいが、装着者12は、自らの意思に応じて動作補助装置10から駆動トルクを付与されて動作することが可能になる。
【0026】
ここで、動作補助装置10の構成の一例について説明する。動作補助装置10は、装着者12に装着されるフレーム構造18に駆動部を設けたものである。駆動部としては、装着者12の右側股関節に位置する右腿駆動モータ20と、装着者12の左側股関節に位置する左腿駆動モータ22と、装着者12の右膝関節に位置する右膝駆動モータ24と、装着者12の左膝関節に位置する左膝駆動モータ26とを有する。これらの駆動モータ20,22,24,26は、制御ユニット(制御部)36からの制御信号により駆動トルクを制御されるDCモータまたはACモータなどからなる電動モータからなる。また、各駆動モータ20,22,24,26は、モータ回転を所定の減速比で減速する減速機構(駆動部に内蔵)を有しており、小型ではあるが十分な駆動力を付与することができる。また、駆動モータ20,22,24,26としては、設置スペースが小さく済むように薄型化された超音波モータを用いても良いのは勿論である。
【0027】
また、装着者12の腰の周囲に装着される腰支持体30には、駆動モータ20,22,24,26を駆動させるための電源として機能するバッテリ32,34が取り付けられている。バッテリ32、34は、充電式バッテリであり、装着者12の歩行動作を妨げないように左右に分散配置されている。
【0028】
また、装着者12の背面側となる腰支持部30の後側には、制御ユニット(制御部)36が取り付けられている。
【0029】
そして、動作補助装置10は、装着者12の右腿の動きに伴う生体電位を検出する生体信号検出センサ38a,38bと、装着者12の左腿の動きに伴う生体電位を検出する生体信号検出センサ40a,40bと、右膝の動きに関わる生体電位を検出する生体信号検出センサ42a,42bと、左膝の動きに関わる生体電位を検出する生体信号検出センサ44a,44bとを有する。
【0030】
これらの各生体信号検出センサ38a,38b,40a,40b,42a,42b,44a,44bは、筋電位信号や神経伝達信号などの生体電位信号(生体信号)を皮膚を介して検出する生体信号検出部であり、微弱電位を検出するための電極(図示せず)を有する。尚、本実施例では、各生体信号検出センサ38a,38b,40a,40b,42a,42b,44a,44bは、電極の周囲を覆う粘着シールにより装着者12の皮膚表面に貼着するように取り付けられる。
【0031】
人体においては、脳からの指令によって骨格筋を形成する筋肉の表面にシナプス伝達物質のアセチルコリンが放出される結果、筋線維膜のイオン透過性が変化して活動電位が発生する。そして、活動電位によって筋線維の収縮が発生し、筋力を発生させる。そのため、骨格筋の電位を検出することにより、歩行動作の際に生じる筋力を推測することが可能になり、この推測された筋力に基づく仮想トルクから歩行動作に必要なアシスト力(駆動トルク)を求めることが可能になる。
【0032】
従って、動作補助装置10では、これらの生体信号検出センサ38a,38b,40a,40b,42a,42b,44a,44bによって検出された生体信号に基づいて4個の駆動モータ20,22,24,26に供給する駆動電流を求め、この駆動電流で駆動モータ20,22,24,26を駆動することで、必要なアシスト力(駆動トルク)が付与されて装着者12の歩行動作を補助するように構成されている。
【0033】
また、歩行動作による重心移動をスムーズに行うため、脚の裏にかかる荷重を検出する必要がある。そのため、装着者12の左右脚の裏には、床反力センサ50a,50b,52a,52b(図2及び図3中、破線で示す)が設けられている。
【0034】
また、床反力センサ50aは、右脚前側の荷重に対する反力を検出し、床反力センサ50bは、右脚後側の荷重に対する反力を検出する。床反力センサ52aは、左脚前側の荷重に対する反力を検出し、床反力センサ52bは、左脚後側の荷重に対する反力を検出する。各床反力センサ50a,50b,52a,52bは、例えば、印加された荷重に応じた電圧を出力する圧電素子、又は、荷重に応じて静電容量が変化するセンサなどからなり、体重移動に伴う荷重変化、及び装着者12の脚と地面との接地の有無を夫々検出することができる。また、左右の足裏に係る荷重のバランスから、重心位置を求めることができる。
【0035】
図4はフレーム構造18の装着前の状態を示す斜視図である。図4に示されるように、フレーム構造18は、装着者12の腰に装着される腰支持体30と、腰支持体30の右側から下方に設けられた右脚補助フレーム部54と、腰支持体30の左側から下方に設けられた左脚補助フレーム部55とを有する。
【0036】
腰支持体30は、例えば剛性を有するジュラルミンやアルミ合金などの金属材により形成された腰サポート部110を有しており、その背面内側には、装着者12の腰背面側との隙間をなくして密着するフィッティング部31が取り付けられている。また、腰支持体30の腰サポート部110の外側には、上体フレーム210を固定するための結合部250が一体的に設けられている。そして、フィッティング部31は、スポンジ又は低反発樹脂材などからなり、装着者12の腰背面側に当接して装着者12の腰を保護する。
【0037】
また、腰支持体30の腰サポート部110は、剛性を有するため、荷重を支えるためのフレームとして機能しており、外周の4箇所にはフレーム結合部250が一体的に設けられている。
【0038】
フレーム結合部250は、第1上フレーム220及び第2上フレーム230の各端部221,223,231,233が挿入される挿入孔252を有する。第1上フレーム220及び第2上フレーム230は、各端部221,223,231,233がフレーム結合部250の挿入孔252に挿入された後、その端部221,223,231,233の外周が各挿入孔252に溶接又はネジ等により固定又は締結される。
【0039】
右脚補助フレーム部54と左脚補助フレーム部55とは、左右対称に配置されており、腰支持体30に連結された腰部連結機構200と、腰部連結機構200より下方に延在し装着者12の腿側方に沿うように形成された第1下フレーム58と、第1下フレーム58より下方に延在し装着者12の脛側方に沿うように形成された第2下フレーム60と、装着者12の脚の裏(靴を履く場合には、靴底)が載置される第3下フレーム62とを有する。
【0040】
腰部連結機構200の下端と第1下フレーム58の上端との間には、軸受構造とされた第1関節64が介在しており、腰部連結機構200と第1下フレーム58とを回動可能に連結している。この第1関節64は、股関節と一致する高さ位置に設けられており、腰部連結機構200が第1関節64の支持側に締結され、第1下フレーム58が第1関節64の回動側に締結されている。また、第1関節64は、駆動モータ20,22が内蔵されたモータユニットを構成しており、第1関節64と駆動モータ20,22とは外観上一体化されている。
【0041】
また、第1下フレーム58の下端と第2下フレーム60の上端との間には、軸受構造とされた第2関節66が介在しており、第1下フレーム58と第2下フレーム60とを回動可能に連結している。この第2関節66は、膝関節と一致する高さ位置に設けられており、第1下フレーム58が第2関節66の支持側に締結され、第2下フレーム60が第2関節66の回動側に締結されている。また、第2関節66には、駆動モータ24,26が内蔵されたモータユニットを構成しており、第2関節66と駆動モータ24,26とは外観上一体化されている。
【0042】
また、第2下フレーム60の下端と第3下フレーム62の上端との間には、軸受構造とされた第3関節68が介在しており、第2下フレーム60と第3下フレーム62とを回動可能に連結している。そして、第3下フレーム62の内側には、装着者12の足を装着する靴84が固定されている。
【0043】
従って、第1下フレーム58及び第2下フレーム60は、腰支持体30に固定された腰部連結機構200に対して第1関節64及び第2関節66を回動支点とする歩行動作を行えるように取り付けられている。すなわち、第1下フレーム58及び第2下フレーム60は、装着者12の脚と同じ動作を行えるように構成されている。また、第3関節68は、装着者12の足首の側方に位置するように設けられている。そのため、靴84は、第3関節68の回動動作により歩行動作に応じて装着者12の足首と同じように床面(または地面)に対する角度が変化する。
【0044】
また、第1関節64及び第2関節66は、駆動モータ20,22,24,26の回転軸が、ギヤを介して被駆動側となる第1下フレーム58、第2下フレーム60に駆動トルクを伝達するように構成されている。
【0045】
さらに、駆動モータ20,22,24,26は、関節回動角度を検出する角度センサ(図6参照)を有する。この角度センサは、例えば、第1関節64及び第2関節66の関節角度に比例したパルス数をカウントするロータリエンコーダなどからなり、関節回動角度に応じたパルス数に対応した電気信号をセンサ出力として出力する。
【0046】
第1関節64の角度センサは、装着者12の股関節の関節角度に相当する腰支持体30と第1下フレーム58との間の回動角度を検出する。また、第2関節66の角度センサは、装着者12の膝関節の関節角度に相当する第1下フレーム58の下端と第2下フレーム60との間の回動角度を検出する。
【0047】
また、第1下フレーム58の長手方向の中間位置には、装着者12の腿に締結されるベルト状の腿締結部材78が取り付けられている。腿締結部材78の内面側には、装着者12の腿との隙間をなくして密着するフィッティング部79が取り付けられている。
【0048】
また、第2フレーム60の長手方向の中間位置には、装着者12の膝下の脛に締結されるベルト状の脛締結部材80が取り付けられている。脛締結部材80の内面側には、装着者12の脛との隙間をなくして密着するフィッティング部81が取り付けられている。
【0049】
従って、駆動モータ20,22,24,26で発生された駆動トルクは、ギヤを介して第1下フレーム58、第2下フレーム60に伝達され、さらに腿締結部材78、脛締結部材80を介して装着者12の脚にアシスト力として伝達される。
【0050】
また、第2下フレーム60の下端には、第3関節軸68を介して靴84が回動可能に連結されている。尚、第1下フレーム58及び第2下フレーム60は、装着者12の脚の長さに応じた長さに調整されている。
【0051】
各フレーム58,60,62は、夫々ジュラルミン等の軽量化された金属材の周囲を弾性を有する樹脂材で覆うように構成されており、腰支持体30及び上体フレーム210、バッテリ32,34、制御ユニット36等の質量を支えることができる。すなわち、動作補助装置10は、腰支持体30、バッテリ32,34、制御ユニット36及び上体フレーム210、防護服14、頭部保護具16の質量が装着者12に作用しないように構成されている。
【0052】
腰支持体30は、内周面中央に装着者12の腰後部(背面)に当接するフィッティング部31を有する金属材からなる腰サポート部110と、腰サポート部110の両端にヒンジを介して連結されたベルト120,121と、一方のベルト120の端部に取り付けられたバックル122と、他方のベルト121の端部に取り付けられた係止用金具124とを有する。
【0053】
腰支持体30を装着者12の腰に装着する際は、腰サポート部110の内側に設けられたフィッティング部31に腰の背面側を当接させた状態でバックル122の挿入口に係止用金具124を挿入して係止させる。そして、ベルト120,121の長さを装着者12のお腹の大きさに応じた長さに調整する。これにより、腰支持体30は、装着者12の腰回りの外周にほぼ密着した保持状態となる。尚、バックル122は、自動車のシートベルトと同様な構成になっており、係止解除部を操作することにより係止用金具124の係止を解除することができるように構成されている。
〔制御システムの構成〕
図5は制御部のシステム構成を示すブロック図である。図5に示されるように、動作補助装置10の制御系システムは、装着者12に対してアシスト力を付与する駆動部140と、装着者12の動作に応じた関節角度(物理現象)、及び、装着者12の重心位置(物理現象)を検出する物理現象検出部142と、装着者12の筋肉の活動に伴って発生する筋電位等を含む(生体信号)を検出する生体信号検出部144とを備えている。尚、上記駆動部140は、駆動モータ20,22,24,26からなる。物理現象検出部142は、上記関節回動角度を検出する角度センサ70,72,74,76(図6参照)及び床反力センサ50a,50b,52a,52bからなる。生体信号検出部144は、生体信号検出センサ38a,38b,40a,40b,42a,42b,44a,44bからなる。
【0054】
データ格納部146には、基準パラメータデータベース148と、指令信号データベース150とが格納されている。随
随意的制御部154は、生体信号検出部の検出信号に応じた指令信号を電力増幅部158に供給する。随意的制御部154は、生体信号検出部144に所定の指令関数f(t)またはゲインPを適用して指令信号を生成する。このゲインPは予め設定された値又は関数でも良く、ゲイン変更部156を介して調整することができる。
【0055】
また、装着者12の皮膚が汗で濡れることが予想される場合には、生体信号検出部144からの生体信号の入力が得られないときに、物理現象検出部142により検出された各データ(角度センサ70,72,74,76(図6参照)により検出された関節角度データ又は反力センサ50a,50b,52a,52bにより検出された重心移動データ)に基づいて各駆動モータ20,22,24,26の駆動トルクを制御する方法を選択することも可能である。
【0056】
物理現象検出部142によって検出された関節角度(θknee,θhip)や重心位置は、基準パラメータデータベース148に入力される。フェーズ特定部152では、物理現象検出部142により検出された関節角度及び重心位置を基準パラメータデータベース148に格納された基準パラメータの関節角度及び重心位置と比較することにより、装着者12の動作のフェーズを特定する。
【0057】
そして、自律的制御部160では、フェーズ特定部152により特定されたフェーズの制御データを得ると、このフェーズの制御データに応じた指令信号を生成し、この動力を駆動部140に発生させるための指令信号を電力増幅部158に供給する。
〔各制御機器の接続系統〕
図6は各制御機器の接続を示すブロック図である。図6に示されるように、バッテリ32,34は、電源回路86に電源供給しており、電源回路86では所定電圧に変換して入出力インターフェイス88に定電圧を供給する。また、バッテリ32,34の充電容量は、バッテリ充電警告部90によって監視されており、バッテリ充電警告部90は、予め設定された残量に低下すると、警告を発して装着者12にバッテリ交換または充電を報知する。
【0058】
各駆動モータ20,22,24,26を駆動する第1乃至第4モータドライバ92〜95は、入出力インターフェイス88を介して制御装置100からの制御信号に応じた駆動電圧を増幅して各駆動モータ20,22,24,26に出力する。
【0059】
各生体信号検出センサ38a,38b,40a,40b,42a,42b,44a,44bから出力された生体電位信号の検出信号は、電力増幅部158の第1乃至第8差動増幅器101〜108によって増幅され、A/D変換器(図示せず)によってデジタル信号に変換されて入出力インターフェイス88を介して制御装置100に入力される。尚、装着者12の皮膚表面で検出される生体電位信号は、微弱である。そのため、第1乃至第8差動増幅器101〜108で例えば、30μVの検出信号をコンピュータが判別可能な3V程度に増幅するには、105倍となる100dBの増幅率が必要になる。
【0060】
また、角度センサ70,72,74,76から出力された角度検出信号は、夫々第1乃至第4角度検出部111〜114に入力される。第1乃至第4角度検出部111〜114は、ロータリエンコーダによって検出されたパルス数を角度に相当する角度データ値に変換しており、検出された回動角度データは入出力インターフェイス88を介して制御装置100に入力される。
【0061】
反力センサ50a,50b,52a,52bから出力された反力検出信号は、夫々第1乃至第4反力検出部121〜124に入力される。第1乃至第4反力検出部121〜124は、圧電素子によって検出された電圧を力に相当するデジタル値に変換しており、検出された反力データは入出力インターフェイス88を介して制御装置100に入力される。
【0062】
データ格納部146のメモリ130は、各データを格納する格納部であり、起立動作、歩行動作や着席動作など各動作パターン(タスク)毎に設定されたフェーズ単位の制御データが予め格納されたデータベース格納領域130Aと、各モータを制御するための制御プログラムが格納された制御プログラム格納領域130Bなどが設けられている。データベース格納領域130Aには、図5に示す基準パラメータデータベース148と指令信号データベース150が格納されている。
【0063】
また、制御装置100から出力された制御データは、入出力インターフェイス88を介してデータ出力部132あるいは通信ユニット134に出力され、例えば、モニタ(図示せず)に表示したり、あるいはデータ監視用コンピュータ(図示せず)などにデータ通信で転送することもできる。
【0064】
また、制御装置100は、前述した自律的制御部160と、フェーズ特定部152と、差分導出部154と、ゲイン変更部156とを備えている。
〔角度センサの検出信号を用いて制御装置100が実行する制御処理〕
ここで、制御装置100が実行する制御処理の手順について図7Aのフローチャートを参照して説明する。図7Aに示されるように、制御装置100は、ステップS11(以下「ステップ」を省略する)で装着者12の動作に伴う物理現象検出部142(角度センサ70,72,74,76)により検出された関節角度(θknee,θhip)を取得する。次にS12に進み、生体信号検出部144(生体信号検出センサ38a,38b,40a,40b,42a,42b,44a,44b)によって検出された筋電位信号(EMGknee,EMGhip)を取得する。
【0065】
次のS12aでは、生体信号検出部144からの生体検出信号が検出できているか否かをチェックする。S12aにおいて、生体信号検出部144からの生体検出信号が検出できていない場合(NOの場合)(例えば、生体信号センサが装着者12の汗で剥がれている場合、あるいは生体信号センサを装着していない場合、生体信号検出部144からの筋電位信号が得られない。)、S13に進み、上記S11、S12で取得された関節角度(θknee,θhip)及び重心位置を基準パラメータデータベース148と照合して装着者12の各動作種別に対応するタスクのフェーズ(動作段階)を特定する。
【0066】
次のS14では、上記S13で特定されたフェーズ(動作段階)に応じた指令関数f(t)及びゲインPを選択する。
【0067】
そして、S15では、選択されたゲインPにより生成された指令信号(制御信号)が、電力増幅部158(モータドライバ92〜95)に供給される。これにより、駆動部140(駆動モータ20,22,24,26)は、駆動トルクを発生することになる。
【0068】
その結果、駆動部140(駆動モータ20,22,24,26)は、装着者12から検出した関節角度及び重心位置に基づいて選択されたフェーズに応じた駆動トルクを発生し、この駆動トルクを第1下フレーム58、第2下フレーム60及び第1締結ベルト78、第2締結ベルト80を介して装着者12の脚にアシスト力として伝達する。
【0069】
このように、装着者12の関節角度と重心位置に基づいてアシストを行うので、装着者12は、生体検出信号が得られなくても駆動部140(駆動モータ20,22,24,26)からの駆動トルクによるアシスト力を付与されて労力が軽減される。
【0070】
例えば、装着者12が防護服14及び頭部保護具16を着用した状態で階段を上る場合には、指令関数f(t)に応じた駆動力を発生させてアシストする。このような場合には、上の段についた脚は、股関節及び膝関節の角度が平地を歩行する場合よりも屈曲した状態で着地することになる、従って、例えば股関節及び/又は膝関節の屈折角度が80°〜100°の時に、床半力センサの検出値が所定の値以上になったら、階段を上るフェーズであると判断し、膝関節及び股関節の角度の伸展に合わせて駆動トルクを発生させる。
【0071】
また、階段を下りるフェーズ、立ち上がりのフェーズ、座りのフェーズであると判断した場合にも、所定の指令関数f(t)に従って駆動力を発生させてアシストをする。
【0072】
なお、装着者12が、平地を歩行している場合には負担が比較的小さいので、駆動部140(駆動モータ20,22,24,26)によるアシストが無くても作業効率は低下しない。従って、一般的な歩行のフェーズであると判断したときには、駆動部140(駆動モータ20,22,24,26)は装着者12の動作を阻害しないように、駆動モータ自体の粘性を補償するように駆動される。
【0073】
S16では、当該タスクの最終フェーズに対する制御処理が行われてかどうかを確認する。S16において、当該タスクの最終フェーズに対する制御処理が残っている場合には、上記S11に戻り、次のフェーズに対する制御処理(S11〜S16)を行う。また、S16において、当該タスクの最終フェーズに対する制御処理を行ったときは、今回の制御処理を終了する。
【0074】
このように、動作補助装置10は、上体フレーム210に防護服14及び頭部保護具16を着用した状態でも駆動部140(駆動モータ20,22,24,26)からの駆動トルクが第1下フレーム58、第2下フレーム60及び第1締結ベルト78、第2締結ベルト80を介して装着者12の脚に伝達されるため、装着者12は例えば階段を上る際でも通常の半分以下の力で動作することが可能になる。さらに、作業に必要な機材を上体フレーム210で支えることで装着者12は、余計な労力を使わずに作業効率を上げることが可能になる。
【0075】
このように、生体信号センサが装着者12の汗で剥がれているような場合、あるいは生体信号センサを装着していない場合には、角度センサ70,72,74,76によって検出された関節回動角度に基づいて装着者12が階段や段差を上っている場合に駆動部140(駆動モータ20,22,24,26)からの駆動トルクを付与することで装着者12の労力を軽減して、作業効率を高めることができる。また、制御装置100が装着者12の動作に応じて駆動部140の駆動トルクを制御するため、装着者12が歩行する際にも防護服14や頭部保護具16の質量を感じることなく、歩行することが可能になり、体力の消耗を抑制できると共に、防護服14を着用した状態での作業時間を延長することが可能になる。
〔生体信号を用いて制御装置100が実行する制御処理〕
図7Bは生体信号センサの検出信号を用いて制御部が実行する制御処理を説明するためのフローチャートである。図7Bに示されるように、S12aにおいて、例えば、装着者12が生体信号センサを適正に装着している場合、生体信号検出部144からの生体電位信号を得ることができる。その場合(YESの場合)、S18に進み指令関数f(t)及びゲインPに基づいて、生体電位信号に応じた指令信号を生成する。
【0076】
次のS19では、指令信号を電力増幅部158(モータドライバ92〜95)に送出する。これにより、装着者12には、生体検出信号に応じたアシスト力を付与されて労力が軽減される。
【0077】
S20では、ゲイン変更部による入力があったかどうか確認する。S20において、ゲイン変更部による入力があった場合には、上記S18に戻り、変更後のゲインPにより制御処理(S18〜S20)を行う。また、S20において、ゲイン変更部による入力が無かったときは、今回の制御処理を終了する。
【0078】
このように、生体信号センサにより生体電位信号が検出できる場合には、生体電位信号に基づいて装着者12の意思に応じて駆動トルクを付与することで装着者12の労力を軽減して、作業効率を高めることができる。また、制御装置100が装着者12の動作に応じて駆動部140の駆動トルクを制御するため、装着者12が歩行する際にも防護服14や頭部保護具16の質量を感じることなく、歩行することが可能になり、体力の消耗を抑制できると共に、防護服14を着用した状態での作業時間を延長することが可能になる。
〔変形例1〕
図8は上体フレームの変形例2を示す斜視図である。図8に示されるように、変形例1の上体フレーム210Aは、第1上フレーム220及び第2上フレーム230の後側フレーム225,235がX字状に交差している。後側フレーム225,235は、端部223,233が円形のフレーム結合部250Aに結合されている。フレーム結合部250Aは、腰支持体30の外周面に回動可能に連結された回動部251と、回動部251に固定されたパイプ嵌合部252とを有する。
【0079】
また、パイプ嵌合部252には、第1上フレーム220及び第2上フレーム230の端部221,223,231,233が嵌合固定されている。そして、回動部251は、腰支持体30の外周面に対して回動することにより、パイプ嵌合部252及び第1上フレーム220及び第2上フレーム230の端部221,223,231,233を回動させることが可能である。
【0080】
さらに、第1上フレーム220及び第2上フレーム230の前側フレーム226,236間には、連結部240Aが連結されている。連結部240Aは、前側フレーム226より水平方向に延在する右ねじ部241と、前側フレーム236より水平方向に延在する左ねじ部242と、一端が右ねじ部241に螺合され他端が左ねじ部242が螺合された雌ねじ部243とを有する。
【0081】
すなわち、連結部240Aは、ターンバックルと同じ構造であり、逆ねじに形成された右ねじ部241及び左ねじ部242に螺合された雌ねじ部243を右回り又は左回りに回動させることによって、右ねじ部241及び左ねじ部242が雌ねじ部243の内側に移動するか、あるいは雌ねじ部243の外側に移動する。これにより、第1上フレーム220及び第2上フレーム230は、左右方向の離間距離が調整されると共に、フレーム結合部250Aが回動して肩支持部222、232の高さ位置及び左右方向位置が調整される。
【0082】
例えば、装着者12の体格が各人によって異なる場合、上記雌ねじ部243を回動操作することで、肩支持部222、232の高さ位置及び左右方向位置を当該装着者12の肩の位置に応じて適宜調整することができる。尚、連結部240Aは、装着者12自身が操作して腰支持体30に対する肩支持部222、232の位置を調整することが可能であるので、防護服14が第1上フレーム220及び第2上フレーム230に支持された状態であっても簡単に肩支持部222、232の高さ位置及び左右方向位置を調整できる。
【0083】
また、連結部240Aは、前側フレーム226,236の左右方向の離間距離及び後側フレーム225,235の回動角度を調整する調整機構であり、調整終了後は、第1上フレーム220及び第2上フレーム230の調整位置を固定するロック機構としても機能する。
〔変形例2〕
図9は上体フレームの変形例2を示す斜視図である。図9に示されるように、変形例2の上体フレーム210Bは、第1上フレーム220及び第2上フレーム230の肩支持部222、232から左右方向に突出する肩保護部224,234が設けられている。肩保護部224,234は、装着者12の肩の上方に離間する高さに配され、上面側には複数の永久磁石260が埋設されている。
【0084】
そして、防護服14の肩部内側には、鉄板などの磁性材を取り付ける。そのため、防護服14を着用すると、肩保護部224,234の上面側に配された複数の永久磁石260の磁力によって防護服14の肩部が吸着される。
【0085】
従って、防護服14は、肩部が装着者12に接触していなくてもずれることが防止され、肩保護部224,234の上面側に配された複数の永久磁石260の磁力によって保持されるため、例えば荷物を肩に背負う場合でも肩部がずれないので、作業を支障なく行える。
〔変形例3〕
図10は上体フレームの変形例3を示す斜視図である。図10に示されるように、変形例3の上体フレーム210Cは、第1上フレーム220及び第2上フレーム230の肩支持部222、232から左右方向に突出する肩保護部224,234が設けられている。肩保護部224,234は、肩保護部224,234に固定された支持部227,237により、前後方向に回動可能に支持され、且つ左右方向に延在する第1アーム270、第2アーム280を支持している。
【0086】
第1アーム270、第2アーム280は、防護服14の両袖に挿入され、防護服14の各袖を上方に持ち上げるようにバネ力を作用させるリンク機構からなる構成である。第1アーム270と第2アーム280とは、同一構成であるので、以下、第1アーム270の構成について説明する。
【0087】
第1アーム270は、肩保護部224の下面側に連結された第1関節271により上下方向に回動可能に支持された第1リンク機構272と、第1リンク機構272の先端の第2関節273により上下方向に回動可能に支持された第2リンク機構274とを有する。また、第2リンク機構274の先端には、防護服14の袖を上方に持ち上げる当接片275が支持されている。
【0088】
第1リンク機構272及び第2リンク機構274は、2本平行リンクをコイルバネ276、277のバネ力によりバランスさせて静止するように構成されている。従って、第1アーム270、第2アーム280は、装着者12が上体フレーム210Cの上から着用された防護服14の袖に通されると、防護服14の袖を上方に持ち上げることができると共に、装着者12の腕の動きに応じて上下方向に回動するため、装着者12の作業を妨げずに防護服14の袖の荷重を支えることができる。よって、上体フレーム210Cは、装着者12の腕の動きを規制することなく、装着者12の労力を軽減することが可能になる。
〔変形例4〕
図11は上体フレームの変形例4を示す斜視図である。図11に示されるように、変形例4の上体フレーム210Dは、肩保護部224,234に固定された支持部227,237により、前後方向に回動可能に支持され、且つ左右方向に延在する第1アーム270A、第2アーム280Aを支持している。第1アーム270Aと第2アーム280Aとは、同一構成であるので、以下、第1アーム270Aの構成について説明する。
【0089】
第1アーム270Aは、中空の金属パイプよりなり、内部の中空部にはワイヤWが挿通されている。また、支持部227及び第1アーム270A、第2アーム280Aの各関節271A,273Aには、ワイヤWが巻き掛けされるプーリ227a、271a、273aが収納されている。
【0090】
また、ワイヤWの先端は当接片275に結合され、ワイヤWの基端はコイルバネ278の上端に結合されている。さらに、コイルバネ278の下端は、金属ロッド279に結合されている。金属ロッド279は、第1上フレーム220の端部223内に摺動可能に挿通されており、上下方向の係止位置を調整可能に取り付けられている。従って、金属ロッド279の上下方向の係止位置を調整することにより、コイルバネ278のバネ力を調整することができる。
【0091】
従って、第1アーム270A、第2アーム280Aは、装着者12が上体フレーム210Dの上から着用された防護服14の袖に通されると、防護服14の袖を上方に持ち上げることができると共に、装着者12の腕の動きに応じて上下方向に回動するため、装着者12の作業を妨げずに防護服14の袖の荷重を支えることができる。よって、上体フレーム210Dは、装着者12の腕の動きを規制することなく、装着者12の労力を軽減することが可能になる。また、上体フレーム210Dは、コイルバネ278が内部に挿入されて外部に露出しない構成であるので、装着者12が動作する際にコイルバネ278に接触せず、作業の妨げにならないように構成されている。
〔変形例5〕
図11は上体フレームの変形例5を示す斜視図である。図11に示されるように、変形例4の上体フレーム210Eは、第1上フレーム220及び第2上フレーム230の肩支持部222、232の上方に頭部保護フレーム290が溶接により固定されている。
【0092】
頭部保護フレーム290は、装着者12の頭部を跨ぐように形成された2本の保護パイプ291,292と、保護パイプ291,292間を連結する連結部293,294とを有する。
また、頭部保護フレーム290の保護パイプ291,292は、左右の支持部222、232を跨ぐように台形状に形成されており、頭部保護具16の内側形状に対応している。そのため、頭部保護具16を頭部保護フレーム290に被せることで、頭部保護部16の質量は、頭部保護フレーム290によって支えられる。これにより、装着者12は、頭部保護部16の質量を全く気にせずに作業を行うことができ、よって、上体フレーム210Eは、装着者12の頭部の負担を軽減して、装着者12の労力を軽減することが可能になる。また、頭部保護具16の質量が装着者12に作用しないため、装着者12の頭部の負担を軽減して体力の消耗を抑制できると共に、防護服14を着用した状態での作業時間を延長することが可能になる。
〔変形例6〕
図13は上体フレームの変形例6を示す斜視図である。図13に示されるように、上体フレーム210Fは、防護服14の内側から装着者12を冷却する冷却ユニット300(冷却部)が設けられている。
【0093】
冷却ユニット300は、装着者12の背中に対向するように配された冷却袋310と、冷却袋310に冷却液を供給する冷却用熱交換器320とを有する。冷却袋310は、樹脂製の袋からなり、内部に複数の流路が格子状に形成されている。また、冷却袋310は、後側フレーム225,235と、後側フレーム225,235間を連結する連結部240とによって画成された空間内に収納されている。そのため、冷却袋310の内側は、装着者12の背中に対向する位置に保持される。
【0094】
冷却用熱交換器320は、例えば印加電圧によって温度を変化させる特性をもつペルチェ素子等からなり、頭部保護フレーム290に支持されたベース330に搭載されている。また、冷却用熱交換器320には、冷却液を循環させるためのポンプを有している。
【0095】
頭部保護フレーム290及び後側フレーム225,235及び連結部240は、中空パイプにより形成されており、内部の中空部分が冷却液の流路になっている。連結部240は、冷却袋310の流入口、流出口に接続されており、冷却用熱交換器320から送液された冷却液を冷却袋310に供給する。また、冷却袋310から排出された冷却液は、後側フレーム235及び頭部保護フレーム290の内部に形成された流路を通過して冷却用熱交換器320に戻されて再度冷却される。
【0096】
また、頭部保護フレーム290及び後側フレーム225,235及び連結部240も冷却液の循環により冷却されるため、冷却袋310と共に、防護服14の内側を冷却することができる。
【0097】
冷却用熱交換器320は、動作補助装置10のバッテリ32,34からの電源供給により作動する。また、冷却用熱交換器320は、防護服14の内部温度を温度センサにより測定し、測定された温度が所定以上に上昇した場合に冷却液を循環させるように制御される。
【0098】
これにより、防護服14の内側の温度が作業に適した温度を保つように温度制御することが可能になり、装着者12が温度上昇により疲労することを防止できる。よって、上体フレーム210Fは、装着者12の体温の上昇を抑制して、装着者12の疲労を軽減することが可能になる。
【0099】
また、装着者12の体温の上昇を抑制することで、装着者が脱水状態になることを防止でき、湿度の高い作業環境下での作業時間の延長が可能になる。
〔変形例7〕
図14は上体フレームの変形例7を示す斜視図である。図14に示されるように、変形例7の上体フレーム210Gは、第1上フレーム220及び第2上フレーム230の肩支持部222、232の上方に頭部保護フレーム290が溶接により固定されている。また、上体フレーム210Fの背側の2本の連結部240には、空気ボンベ400がベルト402により取り付けられている。
【0100】
空気ボンベ400は、金属または複合材により形成された容器であり、内部には圧縮空気が充填されている。また、空気ボンベ400の上端には、電磁弁410が取り付けられている。
【0101】
さらに、電磁弁410は、空気チューブ420を介して装着者12が顔に装着するマスクに接続され、且つ頭部保護フレーム290にも接続されている。頭部保護フレーム290の保護パイプ291,292の内側(装着者12の頭部に対向する側)に複数の空気噴射孔430が設けられている。
【0102】
複数の空気噴射孔430は、電磁弁410の開弁により圧縮空気が供給され、装着者12の頭部に空気を噴射して頭部を空冷する冷却部を構成している。
【0103】
また、電磁弁410は、頭部保護具16の内部温度を温度センサにより測定し、測定された温度が所定以上に上昇した場合に空気を噴射させるように制御される。
【0104】
これにより、頭部保護具16の内側の温度が作業に適した温度を保つように温度制御することが可能になり、装着者12が温度上昇により疲労することを防止できる。また、頭部保護具16の内部は、首から防護服14の内側にも連通されているので、複数の空気噴射孔430から噴射された空気は、装着者12の頭部を冷却した後、防護服14の内側にも流入して防護服14全体を冷却する。よって、上体フレーム210Fは、装着者12の体温の上昇を抑制して、装着者12の疲労を軽減することが可能になる。
【産業上の利用可能性】
【0105】
尚、防護服としては、放射線や化学薬品に限らず、例えば、火災やガスなどから防護するものも含まれる。
【0106】
また、防護服は、上着とズボンとが分かれるタイプでも良いし、一体となったつなぎでも良い。
【符号の説明】
【0107】
10 装着式動作補助装置
12 装着者
14 防護服
14A 上着
14B ズボン
16 頭部保護具
16a 頭部
16b 鍔部
17 保護シールド
18 フレーム構造
20,22,24,26 駆動モータ
30 腰支持体
32,34 バッテリ
31 フィッティング部
36 制御ユニット(制御部)
38a,38b,40a,40b,42a,42b,44a,44b 生体信号検出センサ
50a,50b,52a,52b 床反力センサ
54 右脚補助フレーム部
55 左脚補助フレーム部
58 第1下フレーム
60 第2下フレーム
62 第3下フレーム
64 第1関節
66 第2関節
70,72,74,76 角度センサ
78 腿締結部材
79、81 フィッティング部
80 脛締結部材
84 靴
86 電源回路
88 入出力インターフェイス
90 バッテリ充電警告部
92〜95 モータドライバ
100 制御装置
101〜108 差動増幅器
110 腰サポート部
111〜114 角度検出部
120、121 ベルト
121〜124 反力検出部
130 メモリ
130A データベース格納領域
130B 制御プログラム格納領域
132 データ出力部
134 通信ユニット
140 駆動部
142 物理現象検出部
144 生体信号検出部
146 データ格納部
148 基準パラメータデータベース
150 指令信号データベース
152 フェーズ特定部
154 差分導出部
156 ゲイン変更部
158 電力増幅部
160 自律的制御部
200 腰部連結機構
210、210A〜210G 上体フレーム
220 第1上フレーム
221,223,231,233 端部
222、232 肩支持部
224,234 肩保護部
225,235 後側フレーム
230 第2上フレーム
240、240A 連結部
250、250A フレーム結合部
251 回動部
252 パイプ嵌合部
241 右ねじ部
242 左ねじ部
243 雌ねじ部
260 永久磁石
270、270A 第1アーム
280、280A 第2アーム
271、271A 第1関節
271a、273a プーリ
272 第1リンク機構
273、273A 第2関節
274 第2リンク機構
275 当接片
278 コイルバネ
279 金属ロッド
290 頭部保護フレーム
291,292 保護パイプ
293,294 連結部
300 冷却ユニット
310 冷却袋
320 冷却用熱交換器
330 ベース
400 空気ボンベ
410 電磁弁
420 空気チューブ
430 空気噴射孔
W ワイヤ
【特許請求の範囲】
【請求項1】
装着者の腰に装着される腰支持体と、
該腰支持体の右側を支持するように結合された右脚補助部と、
前記腰支持体の左側を支持するように結合された左脚補助部と、
前記装着者の関節に対応するように前記右脚補助部及び前記左脚補助部に配された複数の駆動部と、
前記複数の駆動部を制御する制御部とを有する装着式動作補助装置において、
前記装着者の上体を囲むように形成された上体フレームを前記腰支持体に設け、
前記上体フレームは、当該装着者が装着する防護服の肩部を支持することを特徴とする装着式動作補助装置。
【請求項2】
前記上体フレームは、前記装着者の上体と非接触となる形状に形成されていることを特徴とする請求項1に記載の装着式動作補助装置。
【請求項3】
前記上体フレームは、金属パイプにより形成され、端部が前記腰支持体に固定された結合部に結合されることを特徴とする請求項1又は2に記載の装着式動作補助装置。
【請求項4】
前記上体フレームは、当該装着者の肩に対応する肩支持部を有し、前記防護服の肩部を前記肩支持部により支持することを特徴とする請求項1乃至3の何れかに記載の装着式動作補助装置。
【請求項5】
前記上体フレームは、端部が前記腰支持体に対して回動可能に結合され、前記防護服の肩部の位置に応じて当接位置が調整されるように設けられたことを特徴とする請求項1乃至4の何れかに記載の装着式動作補助装置。
【請求項6】
前記上体フレームの当該装着者の肩に対応する位置に、前記防護服の袖を支持するように構成された袖支持部を設けたことを特徴とする請求項1乃至5の何れかに記載の装着式動作補助装置。
【請求項7】
前記上体フレームに、前記防護服の内側を冷却する冷却部を設けたことを特徴とする請求項1乃至6の何れかに記載の装着式動作補助装置。
【請求項8】
前記上体フレームに、当該装着者の頭部に装着される頭部保護具を支持する頭部支持フレームを設けたことを特徴とする請求項1乃至7の何れかに記載の装着式動作補助装置。
【請求項9】
前記上体フレームは、
当該装着者の右側に位置する第1フレームと、
当該装着者の左側に位置する第2フレームと、
前記第1フレームと前記第2フレームとを連結する連結部とを有することを特徴とする請求項1乃至8の何れかに記載の装着式動作補助装置。
【請求項10】
前記右脚補助部及び前記左脚補助部に各関節の回動角度を検出する角度センサを設け、
前記制御部は、前記角度センサにより検出された角度検出値に応じて前記駆動部の駆動トルクを制御することを特徴とする請求項1に記載の装着式動作補助装置。
【請求項11】
前記装着者の右脚、左脚の生体信号を検出する生体信号検出センサを設け、
前記制御部は、前記生体信号検出センサにより検出された生体信号検出値に応じて前記駆動部の駆動トルクを制御することを特徴とする請求項1に記載の装着式動作補助装置。
【請求項1】
装着者の腰に装着される腰支持体と、
該腰支持体の右側を支持するように結合された右脚補助部と、
前記腰支持体の左側を支持するように結合された左脚補助部と、
前記装着者の関節に対応するように前記右脚補助部及び前記左脚補助部に配された複数の駆動部と、
前記複数の駆動部を制御する制御部とを有する装着式動作補助装置において、
前記装着者の上体を囲むように形成された上体フレームを前記腰支持体に設け、
前記上体フレームは、当該装着者が装着する防護服の肩部を支持することを特徴とする装着式動作補助装置。
【請求項2】
前記上体フレームは、前記装着者の上体と非接触となる形状に形成されていることを特徴とする請求項1に記載の装着式動作補助装置。
【請求項3】
前記上体フレームは、金属パイプにより形成され、端部が前記腰支持体に固定された結合部に結合されることを特徴とする請求項1又は2に記載の装着式動作補助装置。
【請求項4】
前記上体フレームは、当該装着者の肩に対応する肩支持部を有し、前記防護服の肩部を前記肩支持部により支持することを特徴とする請求項1乃至3の何れかに記載の装着式動作補助装置。
【請求項5】
前記上体フレームは、端部が前記腰支持体に対して回動可能に結合され、前記防護服の肩部の位置に応じて当接位置が調整されるように設けられたことを特徴とする請求項1乃至4の何れかに記載の装着式動作補助装置。
【請求項6】
前記上体フレームの当該装着者の肩に対応する位置に、前記防護服の袖を支持するように構成された袖支持部を設けたことを特徴とする請求項1乃至5の何れかに記載の装着式動作補助装置。
【請求項7】
前記上体フレームに、前記防護服の内側を冷却する冷却部を設けたことを特徴とする請求項1乃至6の何れかに記載の装着式動作補助装置。
【請求項8】
前記上体フレームに、当該装着者の頭部に装着される頭部保護具を支持する頭部支持フレームを設けたことを特徴とする請求項1乃至7の何れかに記載の装着式動作補助装置。
【請求項9】
前記上体フレームは、
当該装着者の右側に位置する第1フレームと、
当該装着者の左側に位置する第2フレームと、
前記第1フレームと前記第2フレームとを連結する連結部とを有することを特徴とする請求項1乃至8の何れかに記載の装着式動作補助装置。
【請求項10】
前記右脚補助部及び前記左脚補助部に各関節の回動角度を検出する角度センサを設け、
前記制御部は、前記角度センサにより検出された角度検出値に応じて前記駆動部の駆動トルクを制御することを特徴とする請求項1に記載の装着式動作補助装置。
【請求項11】
前記装着者の右脚、左脚の生体信号を検出する生体信号検出センサを設け、
前記制御部は、前記生体信号検出センサにより検出された生体信号検出値に応じて前記駆動部の駆動トルクを制御することを特徴とする請求項1に記載の装着式動作補助装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7A】
【図7B】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7A】
【図7B】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2013−13499(P2013−13499A)
【公開日】平成25年1月24日(2013.1.24)
【国際特許分類】
【出願番号】特願2011−147436(P2011−147436)
【出願日】平成23年7月1日(2011.7.1)
【出願人】(504171134)国立大学法人 筑波大学 (510)
【Fターム(参考)】
【公開日】平成25年1月24日(2013.1.24)
【国際特許分類】
【出願日】平成23年7月1日(2011.7.1)
【出願人】(504171134)国立大学法人 筑波大学 (510)
【Fターム(参考)】
[ Back to top ]