
補助データを使用する衛星測位方法
【課題】補助データを使用する衛星測位方法
【解決手段】必ずしも多数の周波数を観察することなく、ユーザーの衛星測位受信機が位相のアンビギュイティを解決できるようにするために、基準ネットワーク(10、12、14)で行う測定により補助データを発生し、このデータをユーザーの受信機へ送る。使用する補助データは、キャリアコードのスライディング組み合わせ(Θeme)に関連するか、または送信機のクロック値を再構成するのに十分なデータに関連する送信機のクロック値から成ることが好ましい。搬送波コードのスライディング組み合わせ(Θeme)に関連する送信機のクロック値は、例えば電離圏の影響のない送信機のクロック値(heme)およびクロックバイアス(C’eme)から再構成できる。
【解決手段】必ずしも多数の周波数を観察することなく、ユーザーの衛星測位受信機が位相のアンビギュイティを解決できるようにするために、基準ネットワーク(10、12、14)で行う測定により補助データを発生し、このデータをユーザーの受信機へ送る。使用する補助データは、キャリアコードのスライディング組み合わせ(Θeme)に関連するか、または送信機のクロック値を再構成するのに十分なデータに関連する送信機のクロック値から成ることが好ましい。搬送波コードのスライディング組み合わせ(Θeme)に関連する送信機のクロック値は、例えば電離圏の影響のない送信機のクロック値(heme)およびクロックバイアス(C’eme)から再構成できる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、無線ナビゲーション、すなわち衛星による測位技術の分野に関し、特に、基準受信機のネットワークを使用して計算される補助データを用いる衛星測位方法に関する。本発明は更に、必要な補助データを計算するための方法に関する。本発明の範囲は、特に衛星測位システム、例えばGPS(全地球測位システム)、ガリレオ、グロナス、QZSS、コンパス、IRNSSなどの送信機から送信される無線ナビゲーション信号を受信することである。
【背景技術】
【0002】
一般に測位システムにおいて、衛星(または疑似衛星)によって送信されるナビゲーション信号は、疑似ランダム二進コードを含む拡散波形によって変調された搬送波(キャリア)の形態となっている。搬送波周波数を中心としてスペクトルを拡散させる搬送波の変調信号は、「拡散スペクトル信号」と称されることが多い。疑似ランダムコードは、この信号の識別子を示し、よって衛星の送信機の識別子を示す。受信機がこの識別子を知ると、これら受信機は、符号分割多元接続(CDMA)を可能にする。これに付随し、一部の衛星測位信号は、搬送波上で更に変調された(疑似ランダムコードよりも高いレートで)二進シーケンスとして有効なデータ(例えばナビゲーションメッセージ)も搬送できる。
【0003】
GPSの場合、1575.42MHzを中心とする周波数バンドL1および1227.6MHzを中心とする周波数バンドL2で、これら無線ナビゲーション信号が送信される。GPSの最新化の一部として、1176.45MHzを中心とするL5バンドが追加される。ガリレオコンステレーション衛星は、バンドE2−L1−E1(中心L1バンドの部分は、GPSの部分と同じである)、E5a(このバンドは、ガリレオ技術用語によれば、GPSのためにスケジュールされたL5バンドを示す)、E5b(1207.14MHzを中心とする)およびE6(1278.75MHzを中心とする)内で送信を行う。コンパスコンステレーションの衛星は、バンドB1(1561.098MHzを中心とする)、バンドB1−2(1589.742MHzを中心とする)、バンドL1(1575.42MHzを中心とする)、バンドB2(1207.14MHzを中心とする)、およびバンドB3(1268.52MHzを中心とする)で送信しているか、または送信することになることに留意されたい。これら中心周波数は、種々の信号の搬送波信号となっている。
【0004】
無線ナビゲーション信号の受信は一般に、搬送波トラッキングループによって駆動される発振器による受信機内で発生される搬送波の内部レプリカを使用する第1復調と、拡散波形トラッキングループ(コードトラッキングループとも称される)により制御される波形発生器によって発生される拡散波形の内部レプリカを使用する第2復調とを含む。受信機の位置を決定するために、搬送波トラッキングループの制御信号および拡散波形が、受信機によって使用される。受信された信号搬送波と搬送波トラッキングループにより時間ステップごとに発生される内部搬送波レプリカとの間の位相差の信号は、第1オブザーバブル(位相オブザーバブル、すなわち測定値)を提供する。受信された信号の拡散波形とトラッキングループ拡散波形による時間ステップごとに発生されるレプリカの内部拡散波形との間の信号遅延は、第2オブザーバブル(コードオブザーバブルまたは測定値)となっている。
【発明の概要】
【発明が解決しようとする課題】
【0005】
従って、受信機が行うことのできる基本的な測定は、コード測定と搬送波位相測定を含む。明らかにこれら基本的測定を組み合わせることができる。コード測定値は、メートルのオーダーまで正確であるが、他方、位相測定値は、数ミリまで正確である。しかしながら、位相測定値は、衛星による送信と受信の間の搬送波位相差の実数部分しか与えることができないという欠点を有する。従って、位相測定値は、送信機(衛星)と受信機との間の整数サイクルの数が開始時に未知であるという点でアンビィギュー(不定または不明確)である。この位相測定の精度を活用できるようにするには、受信機はこれら測定の精度を低下させるアンビィギュイティ(不定性または不明確性)を解決しなければならない。
【0006】
このような位相のアンビィギュイティの解法は、位相測定値の差分(1階差分または2階差分)することによって行われる。このような差分は、数回の測定に共通する(モデル化されていない)誤差源を除くことができ、よって整数情報を明らかにでき、この情報を考慮すると性能を更に改善できる。しかしながらこの整数情報は、1つまだはそれ以上の基本的な位相のアンビィギュイティの間の差から成るので、一般に基本的な位相のアンビィギュイティまで戻って作業することはできない。
【0007】
フランス特許出願第FR2 914 430号は、2つの周波数の観察(すなわち少なくとも2つの異なる周波数でのコード測定と位相測定)の助けにより、基準受信機のネットワークで一貫して位相のアンビィギュイティを解決する方法を述べている。この方法は同時に、ネットワーク(すなわち自分の位置を知りたいユーザーのネットワーク)の外部にある二重周波数の受信機により、補助データとして使用できる1組の衛星クロックを発生する。これらクロックは、基本的測定によって得られる、例えば衛星間でも受信機間でも差分されていない測位方程式を解くときに、位相のアンビィギュイティ全体を強調する特別な性質を有する。フランス特許出願第FR2 914 430号の方法の欠点は、二重周波数の受信機によってしか実施できないことである。
【0008】
本発明の第1の様相の目的は、必ずしも多数の周波数の観察に依存することなく、位相のアンビィギュイティを受信機が除くことができるようにする衛星測位方法を提案することにある。本発明の第2の様相の目的は、かかる衛星測位方法のために必要な補助データを決定するための方法を提案することにある。
【0009】
一般に、本発明は2つの様相を含む。第1に、本発明は、ネットワークの一部となっていないユーザーの受信機が位相のアンビィギュイティを解決できるようにすることにより、付加情報(補助データ)を決定する基準受信機(ステーション)のネットワークのレベルで行われる方法を含む。更に本発明は、基準ステーションのネットワークを使用して算出され、任意の通信手段によって利用できる追加情報を使用し、必ずしもネットワークの一部を形成しない受信機のレベルで実行される方法を含む。
【0010】
明瞭にするために、まず補助データを決定する方法について述べる。以下、無線ナビゲーション信号は、1組の無線ナビゲーション衛星から送信されるものと仮定し、この場合、各衛星は、第1周波数で少なくとも1つの第1無線ナビゲーション信号を一斉送信すると共に第1周波数と異なる第2周波数で第2無線ナビゲーション信号を一斉送信するものと仮定する。
【課題を解決するための手段】
【0011】
補助データを決定するための方法は、次の行為を含む。
・基準ネットワーク内の受信機によって記録される前記無線ナビゲーション信号からの(基本的な、受信機間でも送信機間でも差分されていない)コード測定値および位相測定値を受信する行為。前記位相測定値の各々は、アンビィギュイティ、すなわち未知の整数のサイクルをアプリオリに有する。
・すべての衛星および基準受信機に対して一貫した態様で、前記第1の周波数で前記位相測定値におけるアンビィギュイティを解く行為。
・前記アンビィギュイティの一貫した解から生じる一組の電離圏の影響がない送信機の位相クロック値、および前記アンビィギュイティの一貫した解から生じる一組の電離圏の影響がない受信機の位相クロック値を推定する行為。
・各衛星と基準受信機のペアに対し、前記第1周波数においてこの衛星に対してこの基準受信機によって実行されたコード測定および位相測定から搬送波コードシフトの組み合わせの値を計算する行為。
この値から地理的寄与分、電離圏の影響がない受信機の位相クロック値と電離圏の影響がない送信機の位相クロック値の寄与分だけでなく、位相測定値の解決されたアンビィギュイティの寄与分も減算し、測定残差を得る行為。
・前記ネットワークのうちのすべての衛星および受信機に対して一貫した態様で、前記得た測定残差の各々を、送信機部分と受信機部分とに分離する行為。
・前記測定残差の送信機部分をスムージングする行為。
【0012】
前記ネットワーク外の受信機に対して、アンビィギュイティの一貫した解に関連する電離圏の影響がない送信機のクロック値だけでなく、前記測定残差のスムージングされた送信機部分も補助データとして提供することが好ましい。
【0013】
本発明の好ましい作動モードによれば、本方法は、前記衛星の組のうちの各衛星に対し、前記電離圏の影響がない送信機のクロック値と前記スムージングされた測定残差との和として、前記搬送波コードシフトの組み合わせに関連する送信機のクロック値を計算するための行為を含む。
【0014】
例えば、インターネット、地上放送、衛星などによる通信により、前記ネットワーク外の受信機に対し、前記搬送波コードシフトの組み合わせに関連する前記送信機のクロック値を補助データとして提供することが好ましい。
【0015】
スムージングすべき送信機部分で12時間の周期のサイン関数を固定することにより、その都度、前記測定残差の前記送信機部分のスムージングを実行できる。これは、特に最小二乗法により実行できる。
【0016】
プログラムをコンピュータで作動させるときに、本方法を実施するようになっている、コンピュータプログラムコードを含む支持手段(コンピュータのメモリ、ハードディスク、光波または無線波など)を備える、コンピュータプログラム製品で補助データを決定するための方法を実行することが好ましい。
【0017】
本発明の第1の様相によれば、衛星測位方法は、無線ナビゲーション信号受信機のレベルにおいて、
・前記受信機からの視界内にある前記組のうちの各衛星のために、少なくとも前記第1無線ナビゲーション信号を受信する行為と、
・視界内にある各衛星に対し、受信した前記第1無線ナビゲーション信号の(基本的な、受信機間でも送信機間でも差分されていない)コード測定および位相測定を実行する行為とを備え、前記位相測定値は、アプリオリな未知の整数のサイクルのアンビィギュイティを示し、
・前記組の補助データは前記衛星の組のうちの各衛星に対し、基準ネットワークのうちのすべての衛星および受信機に対して一貫した態様で誘導された、搬送波コードシフトの組み合わせに関連する送信機のクロック値を再構成するのに十分なデータを含む、1組の補助データを受信する行為と、
・各衛星に対し、前記第1無線ナビゲーション信号のコード測定値および位相測定値から搬送波コードシフトの組み合わせ値を計算し、この搬送波コードシフトの組み合わせ値から、この搬送波コードシフトの組み合わせに関連した送信機のクロック値を減算し、アンビィギューでない搬送波コードシフトのオブザーバブルを得る行為と、
・前記アンビィギューでない搬送波コードシフトオブザーバブルを使用して、前記受信機の位置を決定する行為とを備える。
【0018】
前記搬送波コードシフトの組み合わせに関連した前記送信機のクロック値を再構成するのに十分なデータは、前記搬送波コードシフトの組み合わせ自身に関連した前記衛星のクロック値を含むことが好ましい。これとは異なり、前記搬送波コード組み合わせのシフト値に関連する前記送信機のクロック値を再構成するのに十分なデータは、前記アンビィギュイティの一貫した解に関連した前記電離圏の影響がない送信機の位相クロック値だけでなく、上記方法によって得られた前記測定残差のスムージングされた送信機部分も含むことができる。
【0019】
本発明に係わる方法は、特にL5周波数バンド(この場合の第1周波数は、1176.45MHzである)に対して有利である。これとは異なり第1周波数を1575.42MHz、1227.6MHz、1207.14MHz、1278.75MHz、1561.098MHz、1589.742MHz、1207.14MHzまたは1268.52MHzとすることができる。
【0020】
この衛星測位方法は、本方法を実施するようになっている、コンピュータプログラムコードを含む支持手段(コンピュータのメモリ、ハードディスク、光波または無線波など)を備える、コンピュータプログラム製品で実行することが好ましい
【0021】
この衛星測位方法は、GNSS(全地球ナビゲーション衛星システム)受信機として知られる衛星測位デバイスで実行することが好ましい。
【0022】
この衛星測位プロセスは、事後プロセスとして、またはリアルタイムプロセスとして実施できる。
添付図面を参照すれば、説明のために示した好ましい実施方法の詳細な説明から、本発明の上記以外の特徴および特性が明らかとなろう。
【図面の簡単な説明】
【0023】
【図1】基準受信機のネットワークの略図である。
【図2】補助データを決定するための方法のフローチャートである。
【図3】図2の方法で決定できる補助データを使用する衛星測位方法のフローチャートである。
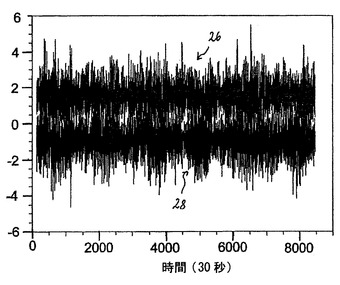
【図4】搬送波コードシフト測定値から、(モデル化された)ジオメトリー寄与分、電離圏の影響がない場合の受信機の寄与分、送信機の位相クロック値および位相測定値のアンビィギュイティの寄与分を減算することによって各々が得られる2つの測定残差の送信機部分のグラフィック図である。
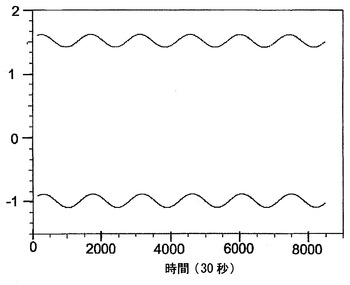
【図5】スムージング後の図4の2つの測定残差の送信機部分のグラフィック図である。
【発明を実施するための形態】
【0024】
ナビゲーション信号受信機は、この受信機の視界内にある種々の衛星(すなわち水平線上の衛星)から受信する無線ナビゲーション信号上の(アンビィギューでない)コード測定および(サイクルの整数がアンビィギューな)位相測定を実行できる。マルチ周波数受信機は、少なくとも2つの異なる周波数f1およびf2で、これら測定を実行できる。従って、二重周波数受信機を仮定した場合、視界内にある各衛星に対し、かつ各時間ステップにおいて、周波数f1およびf2にて、2つのコード測定値P1およびP2、および2つの位相測定値L1およびL2を有する。従って、各時間ステップ(tk)において、受信機にて一組のコード測定値P1j(tk)、P2j(tk)、L1j(tk)およびL2j(tk)を得る。ここで、上付き文字(j)は、受信機が信号を受信する衛星を示す。複数の衛星が地球軌道を回る際には、ある時間に受信機の位置からの視界内にはこれら衛星のうちの一部しかない。次の記載では、表記を容易にするために、時間の依存性および衛星のインデックスは、常に明示的に記載するわけではない。
【0025】
次のような表記を使用する。

ここで、cは光速である。GPSシステムのL1およびL2バンドでは、例えばf1=154f0であり、f2=120f0であり、この場合、f0=10.23MHzである。約束事として、コード測定値P1、P2を長さの単位で表記し、他方、位相測定値L1、L2をサイクルで表記する。
【0026】
コード測定値および位相測定値は、次の式(左は測定値、右はモデルパラメータである)を満たす。
【数1】
ここで、
・D1は、対流圏による時間の伸び、相対論的効果を含む周波数f1に対する衛星の位相中心と受信機の位相中心との間の伝搬距離を示す。
・D2は、周波数f2での類似の値である。
・eは、周波数の平方と共に変化し、コード測定値と位相測定値の間で逆の符号を有するように生じる電離圏による時間の伸びの項である。
・N1およびN2は、2つの搬送波の(整数)位相のアンビィギュイティを示す。
・Wは、サイクルを単位とする「ワインドアップ」効果の寄与分を示す。
・ΔHp,1、ΔHp,2、ΔH1、ΔH2は、異なる測定値に対する受信機のクロックと送信機のクロックとの間の差である。
【0027】
明らかに単一周波数の受信機は、衛星ごとに、かつ時間ステップごとに、1回のコード測定および1回の位相測定しかできない。一般性を失うことなく、これら測定値を(P2およびL2の代わりに)P1およびL1と仮定できる。
【0028】
「電離圏の影響がない」コードの組み合わせがあるが、この電離圏の寄与(影響)分を除いたコード測定値の組み合わせPcを次のように表示する。
【数2】
【0029】
(アンビィギューな)「電離圏の影響がない」の位相の組み合わせを、類似して定義できる。「電離圏の影響がない」組み合わせを用いて作業を行う利点は、適当な精度で電離圏の寄与(影響)分をモデル化することが困難であるという点で、電離圏が比較的未知の誤差源であるということにある。しかしながら、「電離圏の影響がない」コードと位相の組み合わせは、最低二つの周波数で受信する受信機でしか得られない。
【0030】
それにもかかわらず、単一周波数受信機では、位相測定値とコード測定値の和を使用する「搬送波コードシフトの組み合わせ」と称され、(「グループおよび位相電離圏補正」なる用語の同義語であるGRAPHICの組み合わせとも称される)以下Peと称される組み合わせにより、単一周波数での測定値を用いることにより、電離圏の寄与分を除くことが可能である。周波数f1では、この組み合わせをコード測定値と位相測定値の代数的平均として次のように記載できる。
【数3】
【0031】
したがって、次の式が得られる。
【数4】
【0032】
ΔΘ=(ΔHp,1+ΔH1)/2なる項は、(受信機のすべてのチャンネルΘrecに共通する)搬送波コードシフトの組み合わせに関連する受信機のクロックと(Θemeと表示される衛星に依存する)搬送波コードシフトの組み合わせに関連する送信機のクロックとの差に対応する。この送信機のクロックΘemeは、各衛星に対し(受信機の各周波数に対し)アプリオリに未知である。その理由は、衛星間で差分しない測定をした場合に、搬送波コードシフトの組み合わせは、以前は実用上ほとんど関心がなかったものであるからである。
【0033】
すべての衛星に対し、一貫してΔΘの項の送信機部分を推定できると認識したことが、本発明者たちの功績である。この推定は、基準受信機(または基準ステーション)のネットワークを使用して実行される。補助情報として、ネットワークの外の他の受信機に対してΔΘのうちの送信機部分Θemeを伝えることができる。このために、ネットワークの外部にある受信機は、ΔΘの項をすべてのチャンネルに対して、共通するその送信機部分Θemeとその受信機部分Θrecとに分解でき、よって測位式の系内の未知数の数を劇的に低減できる。すべての衛星に対してΔΘのうちの送信機部分Θemeを一貫して決定するので、測位式の系を解くと、異なるチャンネルに対する(すなわち異なる衛星に対する)位相測定値N1の整数のアンビィギュイティを強調できる。
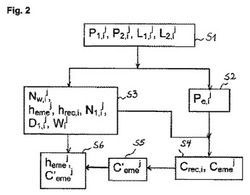
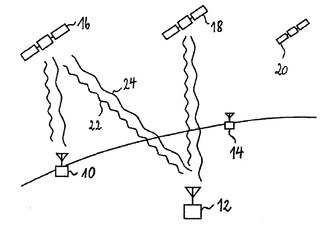
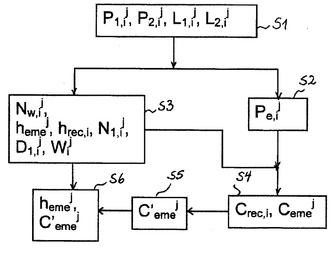
次に、基準受信機のネットワークを通して提供される補助データを決定する方法について説明するが、この方法の一部は、図1に略図で示されており、図2にはこの方法のフローチャートが示されている。基準受信機10、12、14の各々は、無線ナビゲーション衛星16、18、20によって送信される無線送信信号上で(アンビィギューでない)コード測定および(アンビィギューな)位相測定を実行する。各衛星は、少なくとも周波数f1およびf2にて、無線ナビゲーション信号22、24を送信する。(明瞭にするために、図1は可能な衛星と受信機とのリンクのすべえを示しているわけではない。)従って、各時間ステップ(tk)において、全ネットワークに対し、一組のコード測定値P1,ij(tk)、P2,ij(tk)、L1,ij(tk)およびL2,ij(tk)を得る。ここで、上付き文字(j)は、信号が受信された衛星を示し、下付き文字(i)は、測定(図2ではステップS1)を行った受信機を示す。衛星が地球の軌道を回る際には、所定の時間では各基準受信機の位置からの視界内にはこれら衛星の一部しかない。適当な理解をするのに必要でない限り、時間の依存性、受信機のインデックスおよび衛星のインデックスは、明示的にリストアップしない。
【0034】
式(E2)の右辺にある第2の項を、「電離圏の影響がない」のコードクロックの差(Δhp=hp,rec−hp,emeと定義することが必要である。同様に、Δh=hrec−hemeと示される「電離圏の影響がない」の位相クロックの差を同じように定義する。従って、式(E1)の系は次のようになる。
【数5】
ここで、
・ΔT=Trec−Temeは、受信機と送信機との間での、「電離圏の影響がない」位相クロックと周波数f1での位相クロックとの間のクロックバイアスを、構造により差分した値であり、周波数f2に対応する値は、γΔTである。
・ΔTp=Tp,rec−Tp,emeは、受信機と送信機との間での、「電離圏の影響がない」位相クロックと周波数f1での位相クロックとの間のクロックバイアスを、構造により差分した値であり、周波数f2に対応する値は、γΔTpである。
【0035】
この新しい表記を用いることにより、搬送波コードシフトの組み合わせを次のように記述できる。
【数6】
コード測定および位相測定(図2内のステップS2)により、この組み合わせの値(式(E6)の左辺)を直接計算し、一方、モデル化されたパラメータの値(式(E6)の右辺)は、始めは未知であることに留意されたい。
次の式が分かる。
【数7】
【0036】
異なる衛星に対するΘemeの値を計算するために受信機のネットワークに対して一貫した態様で、値hemeを第1ステップで決定する。この方法(図2内のステップS3)は、フランス特許出願第FR2 914 430号、およびD.ラオリヘスおよびF.メルシャーによる論文「差分されていないGPS位相測定値での整数アンビィギュイティの解法およびPPPに対するその応用」(「ION GNSS 2007の議事録」テキサス州フォートワース、9月25日〜28日、839〜848ページ)に記載されている。
【0037】
衛星による信号の送信と受信機による受信との間の(アンビィギューでない)位相差をL1+N1およびL2+N2と記載でき、ここでN1およびN2は、(整数の)アンビィギュイティを示す。Nw=N2−N1とし、ここで、Nwを(整数の)ワイドレーンアンビィギュイティと称す。
【0038】
次の式により、電離圏のコード遅延時間を計算する。
【数8】
【0039】
次の式を作成する。
【数9】
これら値は、測定値にしか依存しない。
【0040】
【0041】
【数10】
(E9)内の(E5)を置換すると、Nwに対する次のようなフォームの式が見つかる
【数11】
ここで、μrecは、Trec、Tp,rec、hrec−hp,rec、μemeのリニアな組み合わせであり、μemeは、Teme、Tp,eme、heme−hp,emeのリニアな組み合わせであり、dは、D1とD2の間の差に比例する。dの値は、一般に0.5ワイドレーンサイクル未満であるので、次のように無視できる。1回の通過にわたる平均値を計算することにより、次の式が得られる。
【数12】
【0042】
追加の仮説をしない場合、この整数と実数とが混合された問題は、特異である。差μrec−μemeを同時に変更する場合、Nwを1つの整数だけシフトすることが可能である。更に、μrecおよびμemeを1つの実定数だけに定める。
【0043】
【0044】
【0045】
ワイドレーンのアンビィギュイティを決定した後は、アンビィギュイティN1は、まだ未知のままである。
【0046】
ワイドレーンのアンビィギュイティは既知であるので、特に、必要なモデル化の精度で、位相N1またはN2のアンビィギュイティ(ナローレーンのアンビィギュイティ)を解くことは、極めて容易である。
【0047】
コード測定値P1およびP2は、送信ポイントと受信ポイントとの間のジオメータ距離、電離圏効果、対流圏効果および送信機と受信機のクロックを含むいくつかのファクターに応じて決まる。残りのアンビィギュイティを識別するには、これら値の十分に正確なモデルを有することが必要であり、これにはクロックにより処理すべき受信機のネットワークのための包括的な解法を必要とする。
【0048】
次のように式を設定する。
【数13】
【0049】
【数14】
【0050】
【数15】
【0051】
直接N1を計算するために、まずδN1を決定する。このようにするには、特に次のような要素を使用するDwの正確なモデル化が必要である。
・二重周波数の位相中心の組み合わせ:これは、受信機のアンテナ位相中心(L1)と送信機のアンテナの位相中心(L2)の電離圏の影響がない状態での組み合わせである。
・衛星の正確な軌道
・衛星姿勢の法則(公称ヨーイング姿勢の法則)
・衛星の偏心度に起因する相対論的効果
・(地球の潮汐のモデル化による)受信機の位置の正確なモデル化
・対流圏の影響による時間の伸びのモデル化(STANAGで定義されているようなサイトに依存する降下関数によるステーションごとの垂直方向の時間の伸び)
・ワインドアップのモデル化(位相のジオメトリー回転)。
【0052】
フィルタによって推定されるパラメータとして次のものがある。
・各時間ステップにおける衛星およびステーションのクロックhemeおよびhrec
・各通過に対し、(整数であるとの制約がない)一定の位相のアンビィギュイティδN1
・時間に対して低速で変動する(一般に4時間ごとに一定のセグメント)場合の各ステーションに対する垂直対流圏の影響による時間の伸び
・(入力データとして精密な軌道が提供されない場合の)精密な衛星軌道
【0053】
フィルタをリアルタイムの処理とよりコンパーチブルな、最小二乗式またはカルマン式とすることができる。フィルタが使用する入力値は、それぞれノイズを有する電離圏の影響がないコード値および電離圏の影響がない位相値であり、これら値は、コードに対しては1mのオーダーであり、位相に対しては1cmのオーダーである。
【0054】
【0055】
このフィルタリングステップは、項Dw(ジオメトリーモデル化)を正しく計算するのに主に使用される。このステージで識別されるクロックは、その後、初期値として使用されるので、その後、小さいクロック変動で作業することが可能となるが、このことは不可欠なことではない。
【0056】
フィルタリングによって得られるDwの値を用いると、基準ネットワークのレベルでδN1の整数値を探す。再び次の式を使用する。
【数16】
ここで、Dwは、フィルタリングによって分かった値をとる。この式は、グローバルな観測不可能性を有することに留意されたい。次のように式を有効に維持しながら、所定の送信機に対する値δN1および対応する値hemeおよび/またはhrecをシフトできる。
【数17】
このステージで、第1ステーション(第1基準受信機)でスタートする値hemeを繰り返し計算し、このステーションのクロックを基準クロックと見なし、ネットワーク全体を完了するように次々にステーションを通過する。
【0057】
第1ステーションに対しては、δN1=0とし、hrec=0と選択する。この選択は任意であり、式(E16)が維持されるように、第1ステーションからの視界内にある衛星に対するhemeの組が得られる。
【0058】
ステーションの追加は次のように実行する。ステーションを追加する前に知っているhemeの組を用い、通過ごとに1つの整数値(δN1)および(追加されるステーションのクロックhrecに対応する)各時間ステップに対する実数値として表記しなければならない残差δN1+hrec/λcを計算する。図2は、新しく追加されたステーションに対する残差δN1+hrec/λcを示す。この残差は、整数値だけ離れており、その最も近い整数値からのオフセットは同じであることに留意されたい。従って、残差と最も近い整数値との間のオフセットは、hrec/λcに対応し、整数値自体は、δN1に対応すると仮定できる。
【0059】
【0060】
整数δN1のセットと共に基準クロックとして第1ステーションのクロックを有する一貫した衛星のクロックhemeおよび受信機のクロックhrecの一組を得ることもできる。
【0061】
【0062】
【0063】
基準受信機のネットワーク内では、前の計算によりμrec、Nw、N1、hrecおよびhemeの値は、既知となっている。従って、値ΔCは次のように観測可能である。
【数18】
【0064】
ΔCは、搬送波コードシフトの組み合わせから(すなわち項(P1+λ1L1)/2から)距離およびワインドアップ効果(すなわち項D1+λ1W/2)を含む(モデル化された)ジオメトリー寄与分、受信機および送信機の電離圏の影響がない位相クロックの値(すなわち項Δh)の寄与分、および位相測定値のアンビィギュイティの寄与分(すなわち項−λ1N1/2)を減算することによって得られる測定残差に対応することに留意されたい。例えば各時間ステップ(図2におけるステップS4)における最小二乗方法により、測定残差の受信機部分Crecおよび送信機部分Cemeを計算できる。ネットワーク内のすべての受信機を考慮することにより、次のようなフォームの式の系を有する。
【数19】
【数20】
【0065】
我々が見いだす値Cemeは、測定時のコードノイズにより極めてノイズが多い。図4には、Cemeのプロット26、28の2つの例が示されている。モデル化(図2内のステップS5)により、値Cemeを平均化することを参照する。12時間の周期を有するサイン関数を使用し、この関数を各Cemeに対して調節することが望ましいことが分かった。従って、スムージングにされた値C’emej(t).を見出す。図5はサイン関数によるスムージング後の図4のプロットを示す。
【0066】
最後に、電離圏の影響がない送信機のクロック値heme(衛星によるものではなく、時間ステップによる値)およびネットワーク外の受信機へ送信でき、アンビィギュイティN1を固定するために、受信機によって使用できる(サイン関数のパラメータにより識別された)値C’emeを、最終的に(図2内のステップS6で)補助データとして有する。
【0067】
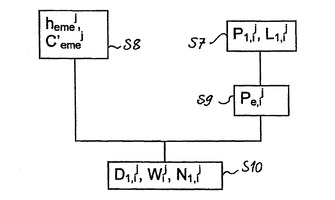
図3には、値hemeおよびC’emeを与える基準ネットワーク外の受信機における衛星測位方法が略図で示されている。受信機は、地理的位置からの視界内にある衛星に対し、コード測定および位相測定を実行する(図3内のステップS7)。更に受信機は、値hemeおよびC’emeで受信する(図3内のステップS8)。受信機は周波数f1におけるコード測定値および位相測定値により、搬送波コードシフトオブザーバブルを誘導できる(図3内のステップS9)。更に受信機は、補助データを使用することによって次のような値を計算できる。
【数21】
【0068】
系(E21)では、衛星のすべて(受信機のチャンネルすべて)にどの項が共通するかをより明瞭に示すために、衛星インデックスを使用した。ここで、項hrec+Crecは、すべての受信機のチャンネルに共通し、各時間ステップにおいて(すなわち各測定に対し)推定すべきグローバルクロックに等価的であることに留意されたい。衛星に依存する位相のアンビィギュイティN1は、衛星が視界内にある時間の間に観測が中断されず、位相ジャンプが検出され、位相測定値L1内に含まれると仮定した場合、1回の通過(衛星が視界内にある時間)当たり1つの値しかとらない。受信機が値heme+C’emeを知るだけで十分であることに注目する価値がある。従って、値hemeおよびC’emeを別々に送信する必要はない。hrec+Crecは上記のようにΘrecに対応し、同じようにheme+C’eme=Θemeである。
【0069】
【0070】
受信機の位置(この場合のD1はスタート時点では未知数である)を決定したい場合、例えば次のパラメータを決定すべき所定の時間(例えば数時間)にわたって、最小二乗問題を解くことができる(図3内のステップS10)。
〇(D1のモデル化に含まれる)受信機の位置
〇(D1のモデル化に含まれる)垂直方向の対流圏による時間の伸び
〇搬送波コードシフトの組み合わせ(hrec+Crec)に関連するクロック受信機
〇位相のアンビィギュイティ(1回の通過につき1つの値)
【0071】
「ブートストラップ」機構によりアンビィギュイティを決定できる。任意の整数に対して1つのアンビィギュイティを固定し、その後、整数値のまわりに他のアンビィギュイティが集まり、これらアンビィギュイティを繰り返して決定できる。
【0072】
情報hemeおよびC’emeを使用することにより、搬送波コードシフトの測定値は、(電離層がない)電離圏の寄与分がなく、コードノイズの半分に等しいノイズを有するアンビィギューでないオブザーバブルとなる。PPP(精密なポイント測位)は、純粋に確率論的な測位では、20〜50cmの精度を有する。測定値の数分の値を記憶することにより、受信機のスタティックな測位を実行した場合、精度は急速に高まる。例えば(受信機がマルチパスにより過度の影響を受けていない場合)15分の測定では約10cmの測位精度、および一日のうちの30分では約2cmの測位精度を得ることができる。ブート時間は、約1時間である。
【技術分野】
【0001】
本発明は、無線ナビゲーション、すなわち衛星による測位技術の分野に関し、特に、基準受信機のネットワークを使用して計算される補助データを用いる衛星測位方法に関する。本発明は更に、必要な補助データを計算するための方法に関する。本発明の範囲は、特に衛星測位システム、例えばGPS(全地球測位システム)、ガリレオ、グロナス、QZSS、コンパス、IRNSSなどの送信機から送信される無線ナビゲーション信号を受信することである。
【背景技術】
【0002】
一般に測位システムにおいて、衛星(または疑似衛星)によって送信されるナビゲーション信号は、疑似ランダム二進コードを含む拡散波形によって変調された搬送波(キャリア)の形態となっている。搬送波周波数を中心としてスペクトルを拡散させる搬送波の変調信号は、「拡散スペクトル信号」と称されることが多い。疑似ランダムコードは、この信号の識別子を示し、よって衛星の送信機の識別子を示す。受信機がこの識別子を知ると、これら受信機は、符号分割多元接続(CDMA)を可能にする。これに付随し、一部の衛星測位信号は、搬送波上で更に変調された(疑似ランダムコードよりも高いレートで)二進シーケンスとして有効なデータ(例えばナビゲーションメッセージ)も搬送できる。
【0003】
GPSの場合、1575.42MHzを中心とする周波数バンドL1および1227.6MHzを中心とする周波数バンドL2で、これら無線ナビゲーション信号が送信される。GPSの最新化の一部として、1176.45MHzを中心とするL5バンドが追加される。ガリレオコンステレーション衛星は、バンドE2−L1−E1(中心L1バンドの部分は、GPSの部分と同じである)、E5a(このバンドは、ガリレオ技術用語によれば、GPSのためにスケジュールされたL5バンドを示す)、E5b(1207.14MHzを中心とする)およびE6(1278.75MHzを中心とする)内で送信を行う。コンパスコンステレーションの衛星は、バンドB1(1561.098MHzを中心とする)、バンドB1−2(1589.742MHzを中心とする)、バンドL1(1575.42MHzを中心とする)、バンドB2(1207.14MHzを中心とする)、およびバンドB3(1268.52MHzを中心とする)で送信しているか、または送信することになることに留意されたい。これら中心周波数は、種々の信号の搬送波信号となっている。
【0004】
無線ナビゲーション信号の受信は一般に、搬送波トラッキングループによって駆動される発振器による受信機内で発生される搬送波の内部レプリカを使用する第1復調と、拡散波形トラッキングループ(コードトラッキングループとも称される)により制御される波形発生器によって発生される拡散波形の内部レプリカを使用する第2復調とを含む。受信機の位置を決定するために、搬送波トラッキングループの制御信号および拡散波形が、受信機によって使用される。受信された信号搬送波と搬送波トラッキングループにより時間ステップごとに発生される内部搬送波レプリカとの間の位相差の信号は、第1オブザーバブル(位相オブザーバブル、すなわち測定値)を提供する。受信された信号の拡散波形とトラッキングループ拡散波形による時間ステップごとに発生されるレプリカの内部拡散波形との間の信号遅延は、第2オブザーバブル(コードオブザーバブルまたは測定値)となっている。
【発明の概要】
【発明が解決しようとする課題】
【0005】
従って、受信機が行うことのできる基本的な測定は、コード測定と搬送波位相測定を含む。明らかにこれら基本的測定を組み合わせることができる。コード測定値は、メートルのオーダーまで正確であるが、他方、位相測定値は、数ミリまで正確である。しかしながら、位相測定値は、衛星による送信と受信の間の搬送波位相差の実数部分しか与えることができないという欠点を有する。従って、位相測定値は、送信機(衛星)と受信機との間の整数サイクルの数が開始時に未知であるという点でアンビィギュー(不定または不明確)である。この位相測定の精度を活用できるようにするには、受信機はこれら測定の精度を低下させるアンビィギュイティ(不定性または不明確性)を解決しなければならない。
【0006】
このような位相のアンビィギュイティの解法は、位相測定値の差分(1階差分または2階差分)することによって行われる。このような差分は、数回の測定に共通する(モデル化されていない)誤差源を除くことができ、よって整数情報を明らかにでき、この情報を考慮すると性能を更に改善できる。しかしながらこの整数情報は、1つまだはそれ以上の基本的な位相のアンビィギュイティの間の差から成るので、一般に基本的な位相のアンビィギュイティまで戻って作業することはできない。
【0007】
フランス特許出願第FR2 914 430号は、2つの周波数の観察(すなわち少なくとも2つの異なる周波数でのコード測定と位相測定)の助けにより、基準受信機のネットワークで一貫して位相のアンビィギュイティを解決する方法を述べている。この方法は同時に、ネットワーク(すなわち自分の位置を知りたいユーザーのネットワーク)の外部にある二重周波数の受信機により、補助データとして使用できる1組の衛星クロックを発生する。これらクロックは、基本的測定によって得られる、例えば衛星間でも受信機間でも差分されていない測位方程式を解くときに、位相のアンビィギュイティ全体を強調する特別な性質を有する。フランス特許出願第FR2 914 430号の方法の欠点は、二重周波数の受信機によってしか実施できないことである。
【0008】
本発明の第1の様相の目的は、必ずしも多数の周波数の観察に依存することなく、位相のアンビィギュイティを受信機が除くことができるようにする衛星測位方法を提案することにある。本発明の第2の様相の目的は、かかる衛星測位方法のために必要な補助データを決定するための方法を提案することにある。
【0009】
一般に、本発明は2つの様相を含む。第1に、本発明は、ネットワークの一部となっていないユーザーの受信機が位相のアンビィギュイティを解決できるようにすることにより、付加情報(補助データ)を決定する基準受信機(ステーション)のネットワークのレベルで行われる方法を含む。更に本発明は、基準ステーションのネットワークを使用して算出され、任意の通信手段によって利用できる追加情報を使用し、必ずしもネットワークの一部を形成しない受信機のレベルで実行される方法を含む。
【0010】
明瞭にするために、まず補助データを決定する方法について述べる。以下、無線ナビゲーション信号は、1組の無線ナビゲーション衛星から送信されるものと仮定し、この場合、各衛星は、第1周波数で少なくとも1つの第1無線ナビゲーション信号を一斉送信すると共に第1周波数と異なる第2周波数で第2無線ナビゲーション信号を一斉送信するものと仮定する。
【課題を解決するための手段】
【0011】
補助データを決定するための方法は、次の行為を含む。
・基準ネットワーク内の受信機によって記録される前記無線ナビゲーション信号からの(基本的な、受信機間でも送信機間でも差分されていない)コード測定値および位相測定値を受信する行為。前記位相測定値の各々は、アンビィギュイティ、すなわち未知の整数のサイクルをアプリオリに有する。
・すべての衛星および基準受信機に対して一貫した態様で、前記第1の周波数で前記位相測定値におけるアンビィギュイティを解く行為。
・前記アンビィギュイティの一貫した解から生じる一組の電離圏の影響がない送信機の位相クロック値、および前記アンビィギュイティの一貫した解から生じる一組の電離圏の影響がない受信機の位相クロック値を推定する行為。
・各衛星と基準受信機のペアに対し、前記第1周波数においてこの衛星に対してこの基準受信機によって実行されたコード測定および位相測定から搬送波コードシフトの組み合わせの値を計算する行為。
この値から地理的寄与分、電離圏の影響がない受信機の位相クロック値と電離圏の影響がない送信機の位相クロック値の寄与分だけでなく、位相測定値の解決されたアンビィギュイティの寄与分も減算し、測定残差を得る行為。
・前記ネットワークのうちのすべての衛星および受信機に対して一貫した態様で、前記得た測定残差の各々を、送信機部分と受信機部分とに分離する行為。
・前記測定残差の送信機部分をスムージングする行為。
【0012】
前記ネットワーク外の受信機に対して、アンビィギュイティの一貫した解に関連する電離圏の影響がない送信機のクロック値だけでなく、前記測定残差のスムージングされた送信機部分も補助データとして提供することが好ましい。
【0013】
本発明の好ましい作動モードによれば、本方法は、前記衛星の組のうちの各衛星に対し、前記電離圏の影響がない送信機のクロック値と前記スムージングされた測定残差との和として、前記搬送波コードシフトの組み合わせに関連する送信機のクロック値を計算するための行為を含む。
【0014】
例えば、インターネット、地上放送、衛星などによる通信により、前記ネットワーク外の受信機に対し、前記搬送波コードシフトの組み合わせに関連する前記送信機のクロック値を補助データとして提供することが好ましい。
【0015】
スムージングすべき送信機部分で12時間の周期のサイン関数を固定することにより、その都度、前記測定残差の前記送信機部分のスムージングを実行できる。これは、特に最小二乗法により実行できる。
【0016】
プログラムをコンピュータで作動させるときに、本方法を実施するようになっている、コンピュータプログラムコードを含む支持手段(コンピュータのメモリ、ハードディスク、光波または無線波など)を備える、コンピュータプログラム製品で補助データを決定するための方法を実行することが好ましい。
【0017】
本発明の第1の様相によれば、衛星測位方法は、無線ナビゲーション信号受信機のレベルにおいて、
・前記受信機からの視界内にある前記組のうちの各衛星のために、少なくとも前記第1無線ナビゲーション信号を受信する行為と、
・視界内にある各衛星に対し、受信した前記第1無線ナビゲーション信号の(基本的な、受信機間でも送信機間でも差分されていない)コード測定および位相測定を実行する行為とを備え、前記位相測定値は、アプリオリな未知の整数のサイクルのアンビィギュイティを示し、
・前記組の補助データは前記衛星の組のうちの各衛星に対し、基準ネットワークのうちのすべての衛星および受信機に対して一貫した態様で誘導された、搬送波コードシフトの組み合わせに関連する送信機のクロック値を再構成するのに十分なデータを含む、1組の補助データを受信する行為と、
・各衛星に対し、前記第1無線ナビゲーション信号のコード測定値および位相測定値から搬送波コードシフトの組み合わせ値を計算し、この搬送波コードシフトの組み合わせ値から、この搬送波コードシフトの組み合わせに関連した送信機のクロック値を減算し、アンビィギューでない搬送波コードシフトのオブザーバブルを得る行為と、
・前記アンビィギューでない搬送波コードシフトオブザーバブルを使用して、前記受信機の位置を決定する行為とを備える。
【0018】
前記搬送波コードシフトの組み合わせに関連した前記送信機のクロック値を再構成するのに十分なデータは、前記搬送波コードシフトの組み合わせ自身に関連した前記衛星のクロック値を含むことが好ましい。これとは異なり、前記搬送波コード組み合わせのシフト値に関連する前記送信機のクロック値を再構成するのに十分なデータは、前記アンビィギュイティの一貫した解に関連した前記電離圏の影響がない送信機の位相クロック値だけでなく、上記方法によって得られた前記測定残差のスムージングされた送信機部分も含むことができる。
【0019】
本発明に係わる方法は、特にL5周波数バンド(この場合の第1周波数は、1176.45MHzである)に対して有利である。これとは異なり第1周波数を1575.42MHz、1227.6MHz、1207.14MHz、1278.75MHz、1561.098MHz、1589.742MHz、1207.14MHzまたは1268.52MHzとすることができる。
【0020】
この衛星測位方法は、本方法を実施するようになっている、コンピュータプログラムコードを含む支持手段(コンピュータのメモリ、ハードディスク、光波または無線波など)を備える、コンピュータプログラム製品で実行することが好ましい
【0021】
この衛星測位方法は、GNSS(全地球ナビゲーション衛星システム)受信機として知られる衛星測位デバイスで実行することが好ましい。
【0022】
この衛星測位プロセスは、事後プロセスとして、またはリアルタイムプロセスとして実施できる。
添付図面を参照すれば、説明のために示した好ましい実施方法の詳細な説明から、本発明の上記以外の特徴および特性が明らかとなろう。
【図面の簡単な説明】
【0023】
【図1】基準受信機のネットワークの略図である。
【図2】補助データを決定するための方法のフローチャートである。
【図3】図2の方法で決定できる補助データを使用する衛星測位方法のフローチャートである。
【図4】搬送波コードシフト測定値から、(モデル化された)ジオメトリー寄与分、電離圏の影響がない場合の受信機の寄与分、送信機の位相クロック値および位相測定値のアンビィギュイティの寄与分を減算することによって各々が得られる2つの測定残差の送信機部分のグラフィック図である。
【図5】スムージング後の図4の2つの測定残差の送信機部分のグラフィック図である。
【発明を実施するための形態】
【0024】
ナビゲーション信号受信機は、この受信機の視界内にある種々の衛星(すなわち水平線上の衛星)から受信する無線ナビゲーション信号上の(アンビィギューでない)コード測定および(サイクルの整数がアンビィギューな)位相測定を実行できる。マルチ周波数受信機は、少なくとも2つの異なる周波数f1およびf2で、これら測定を実行できる。従って、二重周波数受信機を仮定した場合、視界内にある各衛星に対し、かつ各時間ステップにおいて、周波数f1およびf2にて、2つのコード測定値P1およびP2、および2つの位相測定値L1およびL2を有する。従って、各時間ステップ(tk)において、受信機にて一組のコード測定値P1j(tk)、P2j(tk)、L1j(tk)およびL2j(tk)を得る。ここで、上付き文字(j)は、受信機が信号を受信する衛星を示す。複数の衛星が地球軌道を回る際には、ある時間に受信機の位置からの視界内にはこれら衛星のうちの一部しかない。次の記載では、表記を容易にするために、時間の依存性および衛星のインデックスは、常に明示的に記載するわけではない。
【0025】
次のような表記を使用する。
ここで、cは光速である。GPSシステムのL1およびL2バンドでは、例えばf1=154f0であり、f2=120f0であり、この場合、f0=10.23MHzである。約束事として、コード測定値P1、P2を長さの単位で表記し、他方、位相測定値L1、L2をサイクルで表記する。
【0026】
コード測定値および位相測定値は、次の式(左は測定値、右はモデルパラメータである)を満たす。
【数1】
ここで、
・D1は、対流圏による時間の伸び、相対論的効果を含む周波数f1に対する衛星の位相中心と受信機の位相中心との間の伝搬距離を示す。
・D2は、周波数f2での類似の値である。
・eは、周波数の平方と共に変化し、コード測定値と位相測定値の間で逆の符号を有するように生じる電離圏による時間の伸びの項である。
・N1およびN2は、2つの搬送波の(整数)位相のアンビィギュイティを示す。
・Wは、サイクルを単位とする「ワインドアップ」効果の寄与分を示す。
・ΔHp,1、ΔHp,2、ΔH1、ΔH2は、異なる測定値に対する受信機のクロックと送信機のクロックとの間の差である。
【0027】
明らかに単一周波数の受信機は、衛星ごとに、かつ時間ステップごとに、1回のコード測定および1回の位相測定しかできない。一般性を失うことなく、これら測定値を(P2およびL2の代わりに)P1およびL1と仮定できる。
【0028】
「電離圏の影響がない」コードの組み合わせがあるが、この電離圏の寄与(影響)分を除いたコード測定値の組み合わせPcを次のように表示する。
【数2】
【0029】
(アンビィギューな)「電離圏の影響がない」の位相の組み合わせを、類似して定義できる。「電離圏の影響がない」組み合わせを用いて作業を行う利点は、適当な精度で電離圏の寄与(影響)分をモデル化することが困難であるという点で、電離圏が比較的未知の誤差源であるということにある。しかしながら、「電離圏の影響がない」コードと位相の組み合わせは、最低二つの周波数で受信する受信機でしか得られない。
【0030】
それにもかかわらず、単一周波数受信機では、位相測定値とコード測定値の和を使用する「搬送波コードシフトの組み合わせ」と称され、(「グループおよび位相電離圏補正」なる用語の同義語であるGRAPHICの組み合わせとも称される)以下Peと称される組み合わせにより、単一周波数での測定値を用いることにより、電離圏の寄与分を除くことが可能である。周波数f1では、この組み合わせをコード測定値と位相測定値の代数的平均として次のように記載できる。
【数3】
【0031】
したがって、次の式が得られる。
【数4】
【0032】
ΔΘ=(ΔHp,1+ΔH1)/2なる項は、(受信機のすべてのチャンネルΘrecに共通する)搬送波コードシフトの組み合わせに関連する受信機のクロックと(Θemeと表示される衛星に依存する)搬送波コードシフトの組み合わせに関連する送信機のクロックとの差に対応する。この送信機のクロックΘemeは、各衛星に対し(受信機の各周波数に対し)アプリオリに未知である。その理由は、衛星間で差分しない測定をした場合に、搬送波コードシフトの組み合わせは、以前は実用上ほとんど関心がなかったものであるからである。
【0033】
すべての衛星に対し、一貫してΔΘの項の送信機部分を推定できると認識したことが、本発明者たちの功績である。この推定は、基準受信機(または基準ステーション)のネットワークを使用して実行される。補助情報として、ネットワークの外の他の受信機に対してΔΘのうちの送信機部分Θemeを伝えることができる。このために、ネットワークの外部にある受信機は、ΔΘの項をすべてのチャンネルに対して、共通するその送信機部分Θemeとその受信機部分Θrecとに分解でき、よって測位式の系内の未知数の数を劇的に低減できる。すべての衛星に対してΔΘのうちの送信機部分Θemeを一貫して決定するので、測位式の系を解くと、異なるチャンネルに対する(すなわち異なる衛星に対する)位相測定値N1の整数のアンビィギュイティを強調できる。
次に、基準受信機のネットワークを通して提供される補助データを決定する方法について説明するが、この方法の一部は、図1に略図で示されており、図2にはこの方法のフローチャートが示されている。基準受信機10、12、14の各々は、無線ナビゲーション衛星16、18、20によって送信される無線送信信号上で(アンビィギューでない)コード測定および(アンビィギューな)位相測定を実行する。各衛星は、少なくとも周波数f1およびf2にて、無線ナビゲーション信号22、24を送信する。(明瞭にするために、図1は可能な衛星と受信機とのリンクのすべえを示しているわけではない。)従って、各時間ステップ(tk)において、全ネットワークに対し、一組のコード測定値P1,ij(tk)、P2,ij(tk)、L1,ij(tk)およびL2,ij(tk)を得る。ここで、上付き文字(j)は、信号が受信された衛星を示し、下付き文字(i)は、測定(図2ではステップS1)を行った受信機を示す。衛星が地球の軌道を回る際には、所定の時間では各基準受信機の位置からの視界内にはこれら衛星の一部しかない。適当な理解をするのに必要でない限り、時間の依存性、受信機のインデックスおよび衛星のインデックスは、明示的にリストアップしない。
【0034】
式(E2)の右辺にある第2の項を、「電離圏の影響がない」のコードクロックの差(Δhp=hp,rec−hp,emeと定義することが必要である。同様に、Δh=hrec−hemeと示される「電離圏の影響がない」の位相クロックの差を同じように定義する。従って、式(E1)の系は次のようになる。
【数5】
ここで、
・ΔT=Trec−Temeは、受信機と送信機との間での、「電離圏の影響がない」位相クロックと周波数f1での位相クロックとの間のクロックバイアスを、構造により差分した値であり、周波数f2に対応する値は、γΔTである。
・ΔTp=Tp,rec−Tp,emeは、受信機と送信機との間での、「電離圏の影響がない」位相クロックと周波数f1での位相クロックとの間のクロックバイアスを、構造により差分した値であり、周波数f2に対応する値は、γΔTpである。
【0035】
この新しい表記を用いることにより、搬送波コードシフトの組み合わせを次のように記述できる。
【数6】
コード測定および位相測定(図2内のステップS2)により、この組み合わせの値(式(E6)の左辺)を直接計算し、一方、モデル化されたパラメータの値(式(E6)の右辺)は、始めは未知であることに留意されたい。
次の式が分かる。
【数7】
【0036】
異なる衛星に対するΘemeの値を計算するために受信機のネットワークに対して一貫した態様で、値hemeを第1ステップで決定する。この方法(図2内のステップS3)は、フランス特許出願第FR2 914 430号、およびD.ラオリヘスおよびF.メルシャーによる論文「差分されていないGPS位相測定値での整数アンビィギュイティの解法およびPPPに対するその応用」(「ION GNSS 2007の議事録」テキサス州フォートワース、9月25日〜28日、839〜848ページ)に記載されている。
【0037】
衛星による信号の送信と受信機による受信との間の(アンビィギューでない)位相差をL1+N1およびL2+N2と記載でき、ここでN1およびN2は、(整数の)アンビィギュイティを示す。Nw=N2−N1とし、ここで、Nwを(整数の)ワイドレーンアンビィギュイティと称す。
【0038】
次の式により、電離圏のコード遅延時間を計算する。
【数8】
【0039】
次の式を作成する。
【数9】
これら値は、測定値にしか依存しない。
【0040】
【0041】
【数10】
(E9)内の(E5)を置換すると、Nwに対する次のようなフォームの式が見つかる
【数11】
ここで、μrecは、Trec、Tp,rec、hrec−hp,rec、μemeのリニアな組み合わせであり、μemeは、Teme、Tp,eme、heme−hp,emeのリニアな組み合わせであり、dは、D1とD2の間の差に比例する。dの値は、一般に0.5ワイドレーンサイクル未満であるので、次のように無視できる。1回の通過にわたる平均値を計算することにより、次の式が得られる。
【数12】
【0042】
追加の仮説をしない場合、この整数と実数とが混合された問題は、特異である。差μrec−μemeを同時に変更する場合、Nwを1つの整数だけシフトすることが可能である。更に、μrecおよびμemeを1つの実定数だけに定める。
【0043】
【0044】
【0045】
ワイドレーンのアンビィギュイティを決定した後は、アンビィギュイティN1は、まだ未知のままである。
【0046】
ワイドレーンのアンビィギュイティは既知であるので、特に、必要なモデル化の精度で、位相N1またはN2のアンビィギュイティ(ナローレーンのアンビィギュイティ)を解くことは、極めて容易である。
【0047】
コード測定値P1およびP2は、送信ポイントと受信ポイントとの間のジオメータ距離、電離圏効果、対流圏効果および送信機と受信機のクロックを含むいくつかのファクターに応じて決まる。残りのアンビィギュイティを識別するには、これら値の十分に正確なモデルを有することが必要であり、これにはクロックにより処理すべき受信機のネットワークのための包括的な解法を必要とする。
【0048】
次のように式を設定する。
【数13】
【0049】
【数14】
【0050】
【数15】
【0051】
直接N1を計算するために、まずδN1を決定する。このようにするには、特に次のような要素を使用するDwの正確なモデル化が必要である。
・二重周波数の位相中心の組み合わせ:これは、受信機のアンテナ位相中心(L1)と送信機のアンテナの位相中心(L2)の電離圏の影響がない状態での組み合わせである。
・衛星の正確な軌道
・衛星姿勢の法則(公称ヨーイング姿勢の法則)
・衛星の偏心度に起因する相対論的効果
・(地球の潮汐のモデル化による)受信機の位置の正確なモデル化
・対流圏の影響による時間の伸びのモデル化(STANAGで定義されているようなサイトに依存する降下関数によるステーションごとの垂直方向の時間の伸び)
・ワインドアップのモデル化(位相のジオメトリー回転)。
【0052】
フィルタによって推定されるパラメータとして次のものがある。
・各時間ステップにおける衛星およびステーションのクロックhemeおよびhrec
・各通過に対し、(整数であるとの制約がない)一定の位相のアンビィギュイティδN1
・時間に対して低速で変動する(一般に4時間ごとに一定のセグメント)場合の各ステーションに対する垂直対流圏の影響による時間の伸び
・(入力データとして精密な軌道が提供されない場合の)精密な衛星軌道
【0053】
フィルタをリアルタイムの処理とよりコンパーチブルな、最小二乗式またはカルマン式とすることができる。フィルタが使用する入力値は、それぞれノイズを有する電離圏の影響がないコード値および電離圏の影響がない位相値であり、これら値は、コードに対しては1mのオーダーであり、位相に対しては1cmのオーダーである。
【0054】
【0055】
このフィルタリングステップは、項Dw(ジオメトリーモデル化)を正しく計算するのに主に使用される。このステージで識別されるクロックは、その後、初期値として使用されるので、その後、小さいクロック変動で作業することが可能となるが、このことは不可欠なことではない。
【0056】
フィルタリングによって得られるDwの値を用いると、基準ネットワークのレベルでδN1の整数値を探す。再び次の式を使用する。
【数16】
ここで、Dwは、フィルタリングによって分かった値をとる。この式は、グローバルな観測不可能性を有することに留意されたい。次のように式を有効に維持しながら、所定の送信機に対する値δN1および対応する値hemeおよび/またはhrecをシフトできる。
【数17】
このステージで、第1ステーション(第1基準受信機)でスタートする値hemeを繰り返し計算し、このステーションのクロックを基準クロックと見なし、ネットワーク全体を完了するように次々にステーションを通過する。
【0057】
第1ステーションに対しては、δN1=0とし、hrec=0と選択する。この選択は任意であり、式(E16)が維持されるように、第1ステーションからの視界内にある衛星に対するhemeの組が得られる。
【0058】
ステーションの追加は次のように実行する。ステーションを追加する前に知っているhemeの組を用い、通過ごとに1つの整数値(δN1)および(追加されるステーションのクロックhrecに対応する)各時間ステップに対する実数値として表記しなければならない残差δN1+hrec/λcを計算する。図2は、新しく追加されたステーションに対する残差δN1+hrec/λcを示す。この残差は、整数値だけ離れており、その最も近い整数値からのオフセットは同じであることに留意されたい。従って、残差と最も近い整数値との間のオフセットは、hrec/λcに対応し、整数値自体は、δN1に対応すると仮定できる。
【0059】
【0060】
整数δN1のセットと共に基準クロックとして第1ステーションのクロックを有する一貫した衛星のクロックhemeおよび受信機のクロックhrecの一組を得ることもできる。
【0061】
【0062】
【0063】
基準受信機のネットワーク内では、前の計算によりμrec、Nw、N1、hrecおよびhemeの値は、既知となっている。従って、値ΔCは次のように観測可能である。
【数18】
【0064】
ΔCは、搬送波コードシフトの組み合わせから(すなわち項(P1+λ1L1)/2から)距離およびワインドアップ効果(すなわち項D1+λ1W/2)を含む(モデル化された)ジオメトリー寄与分、受信機および送信機の電離圏の影響がない位相クロックの値(すなわち項Δh)の寄与分、および位相測定値のアンビィギュイティの寄与分(すなわち項−λ1N1/2)を減算することによって得られる測定残差に対応することに留意されたい。例えば各時間ステップ(図2におけるステップS4)における最小二乗方法により、測定残差の受信機部分Crecおよび送信機部分Cemeを計算できる。ネットワーク内のすべての受信機を考慮することにより、次のようなフォームの式の系を有する。
【数19】
【数20】
【0065】
我々が見いだす値Cemeは、測定時のコードノイズにより極めてノイズが多い。図4には、Cemeのプロット26、28の2つの例が示されている。モデル化(図2内のステップS5)により、値Cemeを平均化することを参照する。12時間の周期を有するサイン関数を使用し、この関数を各Cemeに対して調節することが望ましいことが分かった。従って、スムージングにされた値C’emej(t).を見出す。図5はサイン関数によるスムージング後の図4のプロットを示す。
【0066】
最後に、電離圏の影響がない送信機のクロック値heme(衛星によるものではなく、時間ステップによる値)およびネットワーク外の受信機へ送信でき、アンビィギュイティN1を固定するために、受信機によって使用できる(サイン関数のパラメータにより識別された)値C’emeを、最終的に(図2内のステップS6で)補助データとして有する。
【0067】
図3には、値hemeおよびC’emeを与える基準ネットワーク外の受信機における衛星測位方法が略図で示されている。受信機は、地理的位置からの視界内にある衛星に対し、コード測定および位相測定を実行する(図3内のステップS7)。更に受信機は、値hemeおよびC’emeで受信する(図3内のステップS8)。受信機は周波数f1におけるコード測定値および位相測定値により、搬送波コードシフトオブザーバブルを誘導できる(図3内のステップS9)。更に受信機は、補助データを使用することによって次のような値を計算できる。
【数21】
【0068】
系(E21)では、衛星のすべて(受信機のチャンネルすべて)にどの項が共通するかをより明瞭に示すために、衛星インデックスを使用した。ここで、項hrec+Crecは、すべての受信機のチャンネルに共通し、各時間ステップにおいて(すなわち各測定に対し)推定すべきグローバルクロックに等価的であることに留意されたい。衛星に依存する位相のアンビィギュイティN1は、衛星が視界内にある時間の間に観測が中断されず、位相ジャンプが検出され、位相測定値L1内に含まれると仮定した場合、1回の通過(衛星が視界内にある時間)当たり1つの値しかとらない。受信機が値heme+C’emeを知るだけで十分であることに注目する価値がある。従って、値hemeおよびC’emeを別々に送信する必要はない。hrec+Crecは上記のようにΘrecに対応し、同じようにheme+C’eme=Θemeである。
【0069】
【0070】
受信機の位置(この場合のD1はスタート時点では未知数である)を決定したい場合、例えば次のパラメータを決定すべき所定の時間(例えば数時間)にわたって、最小二乗問題を解くことができる(図3内のステップS10)。
〇(D1のモデル化に含まれる)受信機の位置
〇(D1のモデル化に含まれる)垂直方向の対流圏による時間の伸び
〇搬送波コードシフトの組み合わせ(hrec+Crec)に関連するクロック受信機
〇位相のアンビィギュイティ(1回の通過につき1つの値)
【0071】
「ブートストラップ」機構によりアンビィギュイティを決定できる。任意の整数に対して1つのアンビィギュイティを固定し、その後、整数値のまわりに他のアンビィギュイティが集まり、これらアンビィギュイティを繰り返して決定できる。
【0072】
情報hemeおよびC’emeを使用することにより、搬送波コードシフトの測定値は、(電離層がない)電離圏の寄与分がなく、コードノイズの半分に等しいノイズを有するアンビィギューでないオブザーバブルとなる。PPP(精密なポイント測位)は、純粋に確率論的な測位では、20〜50cmの精度を有する。測定値の数分の値を記憶することにより、受信機のスタティックな測位を実行した場合、精度は急速に高まる。例えば(受信機がマルチパスにより過度の影響を受けていない場合)15分の測定では約10cmの測位精度、および一日のうちの30分では約2cmの測位精度を得ることができる。ブート時間は、約1時間である。
【特許請求の範囲】
【請求項1】
一組のナビゲーション衛星からの無線ナビゲーション信号を処理することを容易にするための補助データを決定する方法であって、各ナビゲーション衛星は、第1の周波数で少なくとも1つの第1無線ナビゲーション信号を一斉送信すると共に第1の周波数と異なる第2の周波数で第2の無線ナビゲーション信号を一斉送信し、前記方法は、
基準ネットワーク内の受信機によって記録される前記無線ナビゲーション信号からのコード測定値および位相測定値を受信する行為を備え、前記位相測定値の各々は、アンビィギュイティ、すなわち未知の整数のサイクルをアプリオリに有し、
すべての衛星および基準受信機に対して一貫した態様で、前記第1の周波数で前記位相測定値におけるアンビィギュイティを解く行為と、
前記アンビィギュイティの一貫した解から生じる一組の電離圏の影響がない送信機の位相クロック値、および前記アンビィギュイティの一貫した解から生じる一組の電離圏の影響がない受信機の位相クロック値を推定する行為とを備える方法において、
各衛星と基準受信機のペアに対し、前記第1周波数においてこの衛星に対してこの基準受信機によって実行されたコード測定および位相測定から搬送波コードシフトの組み合わせの値を計算する行為と、
この値から地理的寄与分、電離圏の影響がない受信機の位相クロック値と電離圏の影響がない送信機の位相クロック値の寄与分だけでなく、位相測定値の解決されたアンビィギュイティの寄与分も減算し、測定残差を得る行為と、
前記ネットワークのうちのすべての衛星および受信機に対して一貫した態様で、前記得た測定残差の各々を、送信機部分と受信機部分とに分離する行為と、
前記測定残差の送信機部分をスムージングする行為とを特徴とする、補助データを決定する方法。
【請求項2】
前記ネットワーク外の受信機に対して、アンビィギュイティの一貫した解に関連する電離圏の影響がない送信機のクロック値だけでなく、前記測定残差のスムージングされた送信機部分も補助データとして提供する、請求項1に記載の方法。
【請求項3】
前記衛星の組のうちの各衛星に対し、前記電離圏の影響がない送信機のクロック値と前記スムージングされた測定残差との和として、前記搬送波コードシフトの組み合わせに関連する送信機のクロック値を計算するための行為を更に含む、請求項1または2に記載の方法。
【請求項4】
前記ネットワーク外の受信機に対し、前記搬送波コードシフトの組み合わせに関連する前記送信機のクロック値を補助データとして提供する、請求項3に記載の方法。
【請求項5】
前記クロック値の提供を、通信チャンネルを通して実行する、請求項2または4に記載の方法。
【請求項6】
12時間の周期を有するサイン関数を調節することにより、その都度、前記測定残差の前記送信機部分のスムージングを実行する、請求項1〜5のうちのいずれか1項に記載の方法。
【請求項7】
プログラムをコンピュータで作動させるときに、請求項1〜6のうちのいずれか1項に記載の方法を実施するようになっている、コンピュータプログラムコードを含む搬送手段を備える、コンピュータプログラム製品。
【請求項8】
一組の衛星からの無線ナビゲーション信号により、衛星測位する方法であって、各衛星は、第1周波数において少なくとも1つの第1無線ナビゲーション信号を一斉送信すると共に前記第1周波数と異なる第2周波数で第2無線ナビゲーション信号を一斉送信し、前記方法は、
前記受信機からの視界内にある前記組のうちの各衛星のために、少なくとも前記第1無線ナビゲーション信号を受信する行為と、
視界内にある各衛星に対し、受信した前記第1無線ナビゲーション信号のコード測定および位相測定を実行する行為とを備え、前記位相測定値はアプリオリな未知の整数のサイクルのアンビィギュイティを示し、更に一組の補助データを受信する行為とを備える衛星測位方法において、
前記組の補助データは前記衛星の組のうちの各衛星に対し、基準ネットワークのうちのすべての衛星および受信機に対して一貫した態様で誘導された、搬送波コードシフトの組み合わせに関連する送信機のクロック値を再構成するのに十分なデータを含み、
更に、各衛星に対し、前記第1無線ナビゲーション信号のコード測定値および位相測定値から搬送波コードシフトの組み合わせ値を計算し、この搬送波コードシフトの組み合わせ値から、この搬送波コードシフトの組み合わせに関連した送信機のクロック値を減算し、アンビィギューでない搬送波コードシフトのオブザーバブルを得る行為と、
前記アンビィギューでない搬送波コードシフトオブザーバブルを使用して、前記受信機の位置を決定する行為とを特徴とする、衛星測位方法。
【請求項9】
前記搬送波コードシフトの組み合わせに関連した前記送信機のクロック値を再構成するのに十分なデータは、前記搬送波コードシフトの組み合わせに関連した前記衛星のクロック値を含む、請求項8に記載の方法。
【請求項10】
前記搬送波コード組み合わせのシフト値に関連する前記送信機のクロック値を再構成するのに十分なデータは、前記アンビィギュイティの一貫した解に関連した前記電離圏の影響がない送信機の位相クロック値だけでなく、請求項1〜6のいずれか1項に記載の方法によって得られた前記測定残差のスムージングされた送信機部分も含む、請求項8に記載の方法。
【請求項11】
前記第1周波数は、1575.42MHz、1227.6MHz、1176.45MHz、1207.14MHz、1278.75MHz、1561.098MHz、1589.742MHz、1207.14MHzまたは1268.52MHzのうちから選択したものである、請求項1〜6、または8〜10のうちのいずれか1項に記載の方法。
【請求項12】
プログラムをコンピュータで作動させるときに、請求項8〜10のうちのいずれか1項に記載の方法を実施するようになっている、コンピュータプログラムコードを含む搬送手段を備える、コンピュータプログラム製品。
【請求項13】
請求項8〜10のうちのいずれか1項に記載の方法を実行するようになっているGNSS受信機。
【請求項1】
一組のナビゲーション衛星からの無線ナビゲーション信号を処理することを容易にするための補助データを決定する方法であって、各ナビゲーション衛星は、第1の周波数で少なくとも1つの第1無線ナビゲーション信号を一斉送信すると共に第1の周波数と異なる第2の周波数で第2の無線ナビゲーション信号を一斉送信し、前記方法は、
基準ネットワーク内の受信機によって記録される前記無線ナビゲーション信号からのコード測定値および位相測定値を受信する行為を備え、前記位相測定値の各々は、アンビィギュイティ、すなわち未知の整数のサイクルをアプリオリに有し、
すべての衛星および基準受信機に対して一貫した態様で、前記第1の周波数で前記位相測定値におけるアンビィギュイティを解く行為と、
前記アンビィギュイティの一貫した解から生じる一組の電離圏の影響がない送信機の位相クロック値、および前記アンビィギュイティの一貫した解から生じる一組の電離圏の影響がない受信機の位相クロック値を推定する行為とを備える方法において、
各衛星と基準受信機のペアに対し、前記第1周波数においてこの衛星に対してこの基準受信機によって実行されたコード測定および位相測定から搬送波コードシフトの組み合わせの値を計算する行為と、
この値から地理的寄与分、電離圏の影響がない受信機の位相クロック値と電離圏の影響がない送信機の位相クロック値の寄与分だけでなく、位相測定値の解決されたアンビィギュイティの寄与分も減算し、測定残差を得る行為と、
前記ネットワークのうちのすべての衛星および受信機に対して一貫した態様で、前記得た測定残差の各々を、送信機部分と受信機部分とに分離する行為と、
前記測定残差の送信機部分をスムージングする行為とを特徴とする、補助データを決定する方法。
【請求項2】
前記ネットワーク外の受信機に対して、アンビィギュイティの一貫した解に関連する電離圏の影響がない送信機のクロック値だけでなく、前記測定残差のスムージングされた送信機部分も補助データとして提供する、請求項1に記載の方法。
【請求項3】
前記衛星の組のうちの各衛星に対し、前記電離圏の影響がない送信機のクロック値と前記スムージングされた測定残差との和として、前記搬送波コードシフトの組み合わせに関連する送信機のクロック値を計算するための行為を更に含む、請求項1または2に記載の方法。
【請求項4】
前記ネットワーク外の受信機に対し、前記搬送波コードシフトの組み合わせに関連する前記送信機のクロック値を補助データとして提供する、請求項3に記載の方法。
【請求項5】
前記クロック値の提供を、通信チャンネルを通して実行する、請求項2または4に記載の方法。
【請求項6】
12時間の周期を有するサイン関数を調節することにより、その都度、前記測定残差の前記送信機部分のスムージングを実行する、請求項1〜5のうちのいずれか1項に記載の方法。
【請求項7】
プログラムをコンピュータで作動させるときに、請求項1〜6のうちのいずれか1項に記載の方法を実施するようになっている、コンピュータプログラムコードを含む搬送手段を備える、コンピュータプログラム製品。
【請求項8】
一組の衛星からの無線ナビゲーション信号により、衛星測位する方法であって、各衛星は、第1周波数において少なくとも1つの第1無線ナビゲーション信号を一斉送信すると共に前記第1周波数と異なる第2周波数で第2無線ナビゲーション信号を一斉送信し、前記方法は、
前記受信機からの視界内にある前記組のうちの各衛星のために、少なくとも前記第1無線ナビゲーション信号を受信する行為と、
視界内にある各衛星に対し、受信した前記第1無線ナビゲーション信号のコード測定および位相測定を実行する行為とを備え、前記位相測定値はアプリオリな未知の整数のサイクルのアンビィギュイティを示し、更に一組の補助データを受信する行為とを備える衛星測位方法において、
前記組の補助データは前記衛星の組のうちの各衛星に対し、基準ネットワークのうちのすべての衛星および受信機に対して一貫した態様で誘導された、搬送波コードシフトの組み合わせに関連する送信機のクロック値を再構成するのに十分なデータを含み、
更に、各衛星に対し、前記第1無線ナビゲーション信号のコード測定値および位相測定値から搬送波コードシフトの組み合わせ値を計算し、この搬送波コードシフトの組み合わせ値から、この搬送波コードシフトの組み合わせに関連した送信機のクロック値を減算し、アンビィギューでない搬送波コードシフトのオブザーバブルを得る行為と、
前記アンビィギューでない搬送波コードシフトオブザーバブルを使用して、前記受信機の位置を決定する行為とを特徴とする、衛星測位方法。
【請求項9】
前記搬送波コードシフトの組み合わせに関連した前記送信機のクロック値を再構成するのに十分なデータは、前記搬送波コードシフトの組み合わせに関連した前記衛星のクロック値を含む、請求項8に記載の方法。
【請求項10】
前記搬送波コード組み合わせのシフト値に関連する前記送信機のクロック値を再構成するのに十分なデータは、前記アンビィギュイティの一貫した解に関連した前記電離圏の影響がない送信機の位相クロック値だけでなく、請求項1〜6のいずれか1項に記載の方法によって得られた前記測定残差のスムージングされた送信機部分も含む、請求項8に記載の方法。
【請求項11】
前記第1周波数は、1575.42MHz、1227.6MHz、1176.45MHz、1207.14MHz、1278.75MHz、1561.098MHz、1589.742MHz、1207.14MHzまたは1268.52MHzのうちから選択したものである、請求項1〜6、または8〜10のうちのいずれか1項に記載の方法。
【請求項12】
プログラムをコンピュータで作動させるときに、請求項8〜10のうちのいずれか1項に記載の方法を実施するようになっている、コンピュータプログラムコードを含む搬送手段を備える、コンピュータプログラム製品。
【請求項13】
請求項8〜10のうちのいずれか1項に記載の方法を実行するようになっているGNSS受信機。
【図1】

【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公表番号】特表2012−520449(P2012−520449A)
【公表日】平成24年9月6日(2012.9.6)
【国際特許分類】
【出願番号】特願2011−553459(P2011−553459)
【出願日】平成22年3月11日(2010.3.11)
【国際出願番号】PCT/EP2010/053129
【国際公開番号】WO2010/103082
【国際公開日】平成22年9月16日(2010.9.16)
【出願人】(507233361)セントル・ナショナル・デチュード・スパシアル (7)
【Fターム(参考)】
【公表日】平成24年9月6日(2012.9.6)
【国際特許分類】
【出願日】平成22年3月11日(2010.3.11)
【国際出願番号】PCT/EP2010/053129
【国際公開番号】WO2010/103082
【国際公開日】平成22年9月16日(2010.9.16)
【出願人】(507233361)セントル・ナショナル・デチュード・スパシアル (7)
【Fターム(参考)】
[ Back to top ]