
補正データ送信装置、補正データ送信方法、補正データ送信プログラム、測位装置、測位方法および測位プログラム
【課題】センチメートル級の測位精度を維持したままで、基準点から観測点へ配信する補正データの伝送量を削減することを目的とする。
【解決手段】補正データ送信装置200は、第1の周波数帯の信号と第2の周波数帯の信号とを線形結合した1つの電子基準点130の擬似距離に関する値と、第1の周波数帯の信号と第2の周波数帯の信号とを線形結合した1つの電子基準点130の搬送波位相に関する値とを計算する。さらに、補正データ送信装置200は、上記複数の基準点のそれぞれに固有な誤差量を示す基準点固有誤差を計算する。そして、補正データ送信装置200は、計算した擬似距離に関する値と搬送波位相に関する値と基準点固有誤差とを、補正データ201として測位装置300へ配信する。測位装置300は、補正データ送信装置200から配信された補正データ201と、観測点で受信した観測データとを用いて、移動体120の位置を算出する。
【解決手段】補正データ送信装置200は、第1の周波数帯の信号と第2の周波数帯の信号とを線形結合した1つの電子基準点130の擬似距離に関する値と、第1の周波数帯の信号と第2の周波数帯の信号とを線形結合した1つの電子基準点130の搬送波位相に関する値とを計算する。さらに、補正データ送信装置200は、上記複数の基準点のそれぞれに固有な誤差量を示す基準点固有誤差を計算する。そして、補正データ送信装置200は、計算した擬似距離に関する値と搬送波位相に関する値と基準点固有誤差とを、補正データ201として測位装置300へ配信する。測位装置300は、補正データ送信装置200から配信された補正データ201と、観測点で受信した観測データとを用いて、移動体120の位置を算出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えば、測位に用いられる補正データを送信する補正データ送信装置、補正データ送信方法および補正データ送信プログラムと、補正データを用いて自己位置を測位する測位装置、測位方法および測位プログラムに関するものである。
【背景技術】
【0002】
従来、RTK(Real Time Kinematic)方式のように、GPS(Global Positioning System)衛星等の測位衛星から送信された電波を観測点および基準点で受信し、観測点および基準点で受信したそれぞれの電波の搬送波位相の差を用いてセンチメートル級の精度で測位を行う場合がある。この場合、第1の周波数帯の信号であるL1波(周波数f1=1575.42MHz)のデータと、第2の周波数帯の信号であるL2波(周波数f2=1227.6MHz)のデータとの2つの周波数のデータが用いられる。このため、基準点で受信した擬似距離および搬送波位相の観測データとして2周波のデータが観測点へ配信されていた(特許文献1、特許文献2)。
【0003】
移動体等が高精度測位を行うときに基準点から観測点(移動体)へ配信される補正データの伝送量の削減は、通信回線を有効に利用する上で極めて有用である。
【特許文献1】特開2003−315084号公報
【特許文献2】特開2005−69866号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
本発明は、例えば、センチメートル級の測位精度を維持したままで、基準点から観測点へ配信するデータ伝送量を削減することを目的とする。
【課題を解決するための手段】
【0005】
本発明の補正データ送信装置は、自己位置を測位する測位装置へ、測位に用いられる補正データを送信する補正データ送信装置であり、GPS(Global Positioning System)衛星から第1の周波数帯で送信される第1の搬送波と前記GPS衛星から第2の周波数帯で送信される第2の搬送波とを受信する電子基準点が前記第1の搬送波から得る情報であり前記GPS衛星と前記電子基準点との擬似距離を示す第1の擬似距離と、前記電子基準点が前記第1の搬送波から得る情報であり前記第1の搬送波の位相を示す第1の搬送波位相と、前記電子基準点が前記第2の搬送波から得る情報であり前記GPS衛星と前記電子基準点との擬似距離を示す第2の擬似距離と、前記電子基準点が前記第2の搬送波から得る情報であり前記第2の搬送波の位相を示す第2の搬送波位相とを通信装置を用いて収集する電子基準点情報収集部と、前記電子基準点情報収集部により収集された前記第1の擬似距離と前記電子基準点情報収集部により収集された前記第2の擬似距離とを線形結合した値をCPU(Central Processing Unit)を用いて擬似距離結合値として計算する擬似距離結合値計算部と、前記電子基準点情報収集部により収集された前記第1の搬送波位相と前記電子基準点情報収集部により収集された前記第2の搬送波位相とを線形結合した値をCPUを用いて搬送波位相結合値として計算する搬送波位相結合値計算部と、前記擬似距離結合値計算部により計算された擬似距離結合値と前記搬送波位相結合値計算部により計算された搬送波位相結合値とを含んだデータを前記補正データとして通信装置を用いて前記測位装置へ送信する補正データ送信部とを備える。
【発明の効果】
【0006】
本発明によれば、2つの擬似距離を結合した擬似距離結合値と2つの搬送波位相を結合した搬送波位相結合値とを補正データにすることにより、センチメートル級の測位精度を維持したままで、基準点(電子基準点)から観測点(測位装置)へ配信する補正データの伝送量を削減することができる。
【発明を実施するための最良の形態】
【0007】
実施の形態1.
実施の形態1では、測位に用いられる補正データを測位装置へ配信する測位用補正データ配信システムについて説明する。
補正データとは、後述するように、各GPS衛星に関する基準点データおよび補正量を含むデータである。
【0008】
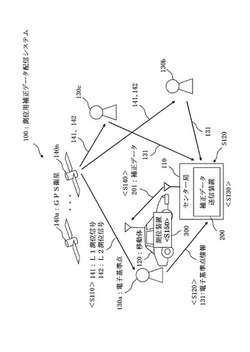
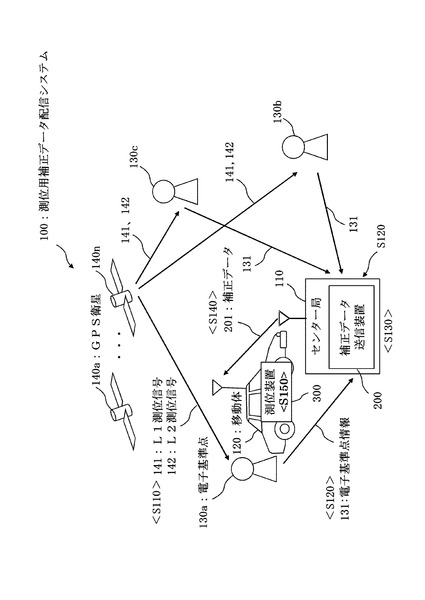
図1は、実施の形態1における測位用補正データ配信システム100の構成図である。
実施の形態1における測位用補正データ配信システム100の構成について、図1に基づいて以下に説明する。
【0009】
測位用補正データ配信システム100は、センター局110の補正データ送信装置200、複数のGPS衛星140(人工衛星)および複数の電子基準点130を備える。
【0010】
まず、測位用補正データ配信システム100による補正データ201の配信方法および各移動体120の測位装置300による測位方法の概要について説明する。
複数のGPS衛星140(140a、・・・、140n)はそれぞれL1測位信号141およびL2測位信号142を発信し(S110)、複数の電子基準点130(130a、130b、130c、・・・)はそれぞれL1測位信号141およびL2測位信号142から得た電子基準点情報131をセンター局110の補正データ送信装置200に送信する(S120)。
補正データ送信装置200は、電子基準点情報131に基づいて補正データ201を生成し(S130)、生成した補正データ201を配信する(S140)。
各移動体120の測位装置300は、補正データ送信装置200から配信された補正データ201を用いてGPS測位時に補正を行い、移動体120の位置を測位する(S150)。
【0011】
補正データ201には、各電子基準点130で観測された(1)L1測位信号141から得られた擬似距離(2)L2測位信号142から得られた擬似距離(3)L1測位信号141から得られた搬送波位相(4)L2測位信号142から得られた搬送波位相が含まれる。
さらに、補正データ201には、各電子基準点130による観測時の(5)衛星位置誤差(6)電離層遅延量が含まれる。
【0012】
補正データ送信装置200は、(1)L1測位信号141から得られる擬似距離と(2)L2測位信号142から得られる擬似距離とを線形結合させて補正データ201に含めることにより、補正データ201の擬似距離に関するデータ量を半減させる。
さらに、補正データ送信装置200は、(3)L1測位信号141から得られた搬送波位相と(4)L2測位信号142から得られた搬送波位相とを線形結合させて補正データ201に含めることにより、補正データ201の搬送波位相に関するデータ量を半減させる。
さらに、補正データ送信装置200は、(5)衛星位置誤差と(6)電離層遅延量との合成値を補正データ201に含めることにより、補正データ201の補正量(衛星位置誤差、電離層遅延量)に関するデータ量を半減させる。
これにより、測位用補正データ配信システム100は補正データ201の配信時の伝送量を半減させ、通信回線の負荷を軽減することができる。
【0013】
次に、測位用補正データ配信システム100の各構成の詳細について説明する。
【0014】
複数のGPS衛星140(140a、・・・、140n)はそれぞれ、周波数が1575.42MHz(以下、「f1」と記す)であるL1波と呼ばれる電波(以下、「L1測位信号141」という)と、周波数が1227.6MHz(以下、「f2」と記す)であるL2波と呼ばれる電波(以下、「L2測位信号142」という)とを発信する。
L1測位信号141(第1の搬送波)およびL2測位信号142(第2の搬送波)は、各GPS衛星140の軌道などを示す測位情報(「航法メッセージ」ともいう)を搬送する。
【0015】
複数の電子基準点130(130a、130b、130c、・・・)はそれぞれ、複数のGPS衛星140それぞれからL1測位信号141およびL2測位信号142を受信する。
各電子基準点130は、L1測位信号141の受信結果に基づいて、GPS衛星140と自己との擬似距離ρ1R(第1の擬似距離)およびL1測位信号141の搬送波位相φ1R(第1の搬送波位相)を算出する。さらに、各電子基準点130は、L2測位信号142の受信結果に基づいて、GPS衛星140と自己との擬似距離ρ2R(第2の擬似距離)およびL2測位信号142の搬送波位相φ2R(第2の搬送波位相)を算出する。添え字「R」は、電子基準点130の情報であることを意味する。
そして、各電子基準点130は、自己の識別情報、観測データ(擬似距離ρ1R、擬似距離ρ2R、搬送波位相φ1R、搬送波位相φ2R)などを含む電子基準点情報131を補正データ送信装置200に送信する。観測データには、GPS衛星140aから発信された測位信号に基づく疑似距離・搬送波位相、GPS衛星140nから発信された測位信号に基づく疑似距離・搬送波位相など、複数のGPS衛星140それぞれの測位信号に基づく疑似距離・搬送波位相が含まれる。
なお、電子基準点130は位置(座標値)が既知である。
【0016】
補正データ送信装置200は、複数の電子基準点130それぞれから電子基準点情報131を受信する。
補正データ送信装置200は、受信した電子基準点情報131に基づいて、擬似距離ρ1Rと擬似距離ρ2Rとを線形結合した擬似距離結合値comb(ρR)を算出すると共に、搬送波位相φ1Rと搬送波位相φ2Rとを線形結合した搬送波位相結合値comb(φR)を算出する。
さらに、補正データ送信装置200は、受信した電子基準点情報131に基づいて、擬似距離結合値comb(ρR)および搬送波位相結合値comb(φR)に含まれる2つの誤差である衛星位置誤差ERと電離層遅延量IRとを合成させた合成値に相当する値を二重差で補正量∇ΔδR(基準点側補正量)として算出する。補正量∇ΔδRは、衛星位置誤差ERと電離層遅延量IRとの2つの誤差の補正に用いられる。
そして、補正データ送信装置200は、基準点データ(擬似距離結合値comb(ρR)、搬送波位相結合値comb(φR))と補正量∇ΔδRとを含む補正データ201を配信する。補正データ201には、複数の電子基準点130(130a、130b、130c、・・・)それぞれの電子基準点情報131に基づく基準点データおよび補正量∇ΔδRが含まれる。
【0017】
各移動体120に備わる測位装置300は、補正データ送信装置200から配信された補正データ201を受信する。
測位装置300は、電子基準点130と同様に、複数のGPS衛星140それぞれからL1測位信号141およびL2測位信号142を受信し、擬似距離ρ1M(第1の測位側擬似距離)、擬似距離ρ2M(第2の測位側擬似距離)、搬送波位相φ1M(第1の測位側搬送波位相)および搬送波位相φ2M(第2の測位側搬送波位相)を算出する。添え字「M」は、移動体120の情報であることを意味する。
測位装置300は、補正データ送信装置200と同様に、擬似距離結合値comb(ρM)と搬送波位相結合値comb(φM)とを算出する。
測位装置300は、補正データ201に含まれる各電子基準点130の補正量∇ΔδRに基づいて、自己の補正量を算出する。以下、測位装置300の補正量(測位側補正量)を「補正誤差∇ΔδM」という。
そして、測位装置300は、擬似距離結合値comb(ρM)、搬送波位相結合値comb(φM)、補正誤差∇ΔδM、擬似距離結合値comb(ρR)および搬送波位相結合値comb(φR)に基づいて、移動体120が位置する地点の座標を測位する。
【0018】
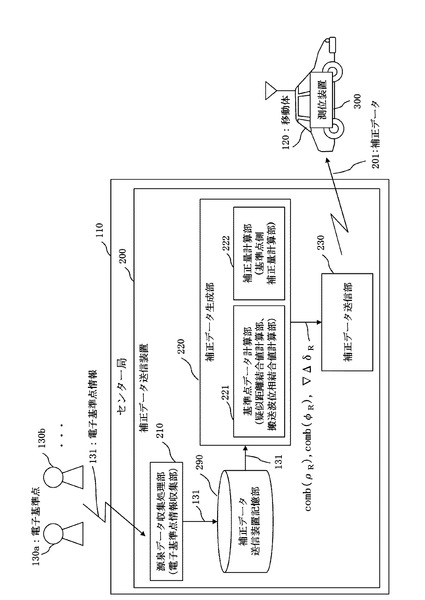
図2は、実施の形態1における補正データ送信装置200の機能構成図である。
センター局110に設けられる補正データ送信装置200の機能構成について、図2に基づいて以下に説明する。
【0019】
補正データ送信装置200は、源泉データ収集処理部210、補正データ生成部220、補正データ送信部230および補正データ送信装置記憶部290を備える。
【0020】
源泉データ収集処理部210(電子基準点情報収集部)は、複数の電子基準点130(130a、130b、・・・)それぞれから電子基準点情報131を通信装置を用いて収集する。
電子基準点情報131には、擬似距離ρ1R、擬似距離ρ2R、搬送波位相φ1R、搬送波位相φ2Rなどが含まれる。
【0021】
補正データ生成部220は、基準点データ計算部221および補正量計算部222を備え、補正データ201を生成する。
基準点データ計算部221(擬似距離結合値計算部)は、源泉データ収集処理部210により収集された電子基準点情報131に基づいて、擬似距離ρ1Rと擬似距離ρ2Rとを線形結合した値をCPU(Central Processing Unit)を用いて擬似距離結合値comb(ρR)として計算する。
さらに、基準点データ計算部221(搬送波位相結合値計算部)は、源泉データ収集処理部210により収集された電子基準点情報131に基づいて、搬送波位相φ1Rと搬送波位相φ2Rとを線形結合した値をCPUを用いて搬送波位相結合値comb(φR)として計算する。
補正量計算部222(基準点側補正量計算部)は、擬似距離結合値comb(ρR)および搬送波位相結合値comb(φR)に含まれる誤差を補正する補正量∇ΔδRをCPUを用いて計算する。
【0022】
補正データ送信部230は、補正データ生成部220により計算された擬似距離結合値comb(ρR)、搬送波位相結合値comb(φR)および補正量∇ΔδRを含んだデータを補正データ201として通信装置を用いて移動体120の測位装置300へ送信する。
【0023】
補正データ送信装置記憶部290は、補正データ送信装置200で使用される各種データを記憶媒体を用いて記憶する。
例えば、補正データ送信装置記憶部290は、源泉データ収集処理部210により収集された電子基準点情報131や補正データ生成部220により計算された各値を記憶し、また、各電子基準点130の座標値や各GPS衛星140の軌道などの情報が予め記憶される。
【0024】
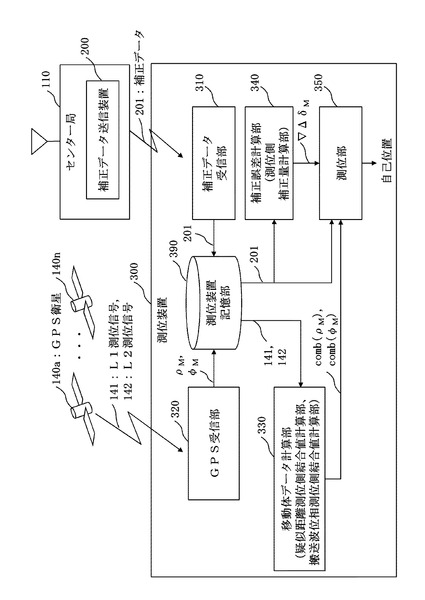
図3は、実施の形態1における測位装置300の機能構成図である。
実施の形態1における測位装置300の機能構成について、図3に基づいて以下に説明する。
【0025】
測位装置300は、補正データ受信部310、GPS受信部320、移動体データ計算部330、補正誤差計算部340、測位部350および測位装置記憶部390を備える。
【0026】
補正データ受信部310は、センター局110の補正データ送信装置200により送信された補正データ201を通信装置を用いて受信する。
【0027】
GPS受信部320は、複数のGPS衛星140(140a、・・・、140n)それぞれからL1測位信号141とL2測位信号142とをGPS受信機を用いて受信する。
そして、GPS受信部320は、受信したL1測位信号141から擬似距離ρ1Mと搬送波位相φ1Mとを取得すると共に、受信したL2測位信号142から擬似距離ρ2Mと搬送波位相φ2Mとを取得する。さらに、GPS受信部320は、疑似距離に基づいて概略位置を測位する。
GPS受信部320のこれらの機能は、一般的なGPS受信機の機能と同じである。
【0028】
移動体データ計算部330(擬似距離測位側結合値計算部)は、擬似距離ρ1Mと擬似距離ρ2Mとを線形結合した値をCPUを用いて擬似距離結合値comb(ρM)として計算する。
さらに、移動体データ計算部330(搬送波位相測位側結合値計算部)は、搬送波位相φ1Mと搬送波位相φ2Mとを線形結合した値をCPUを用いて搬送波位相結合値comb(φM)として計算する。
【0029】
補正誤差計算部340(測位側補正量計算部)は、補正データ受信部310により受信された補正データ201に含まれる補正量∇ΔδRに基づいて擬似距離結合値comb(ρM)および搬送波位相結合値comb(φM)に含まれる誤差を補正する補正量を補正誤差∇ΔδMとしてCPUを用いて計算する。
【0030】
測位部350は、擬似距離結合値comb(ρM)、搬送波位相結合値comb(φM)、補正誤差∇ΔδM、擬似距離結合値comb(ρR)および搬送波位相結合値comb(φR)に基づいて、自己位置をCPUを用いて計算する。
【0031】
測位装置記憶部390は、測位装置300で使用される各種データを記憶媒体を用いて記憶する。
例えば、測位装置記憶部390は、補正データ受信部310により受信された補正データ201、GPS受信部320により取得された擬似距離や搬送波位相、移動体データ計算部330により計算された擬似距離結合値comb(ρM)や搬送波位相結合値comb(φM)、補正誤差計算部340により計算された補正誤差∇ΔδM、測位部350により計算された自己位置を記憶する。
【0032】
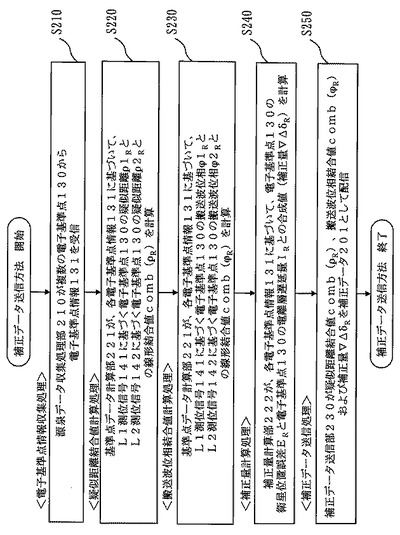
図4は、実施の形態1おける補正データ送信装置200の補正データ送信方法を示すフローチャートである。
実施の形態1における補正データ送信装置200の補正データ送信方法について、図4に基づいて以下に説明する。
補正データ送信装置200の各「〜部」は、以下に説明する処理をCPUを用いて実行する。
【0033】
まず、源泉データ収集処理部210は複数の電子基準点130それぞれから電子基準点情報131を受信する(S210)。
次に、基準点データ計算部221は、各電子基準点情報131に基づいて、擬似距離結合値comb(ρR)を計算し(S220)、搬送波位相結合値comb(φR)を計算する(S230)。
また、補正量計算部222は、各電子基準点情報131に基づいて、補正量∇ΔδRを計算する(S240)。
そして、補正データ送信部230は擬似距離結合値comb(ρR)、搬送波位相結合値comb(φR)および補正量∇ΔδRを含めて補正データ201を配信する(S250)。
以下に、S210〜S250の詳細について説明する。
【0034】
<S210:電子基準点情報収集処理の一例>
源泉データ収集処理部210は、複数の電子基準点130それぞれから電子基準点情報131を受信し、受信した電子基準点情報131を補正データ送信装置記憶部290に記憶する。
各電子基準点情報131には、電子基準点130それぞれの識別情報および観測データ(擬似距離ρ1R、擬似距離ρ2R、搬送波位相φ1R、搬送波位相φ2R)が含まれる。観測データは測位信号を発信したGPS衛星140毎に含まれる。
【0035】
<S220:擬似距離結合値計算処理の一例>
補正データ生成部220は、補正データ送信装置記憶部290から複数の電子基準点130それぞれの電子基準点情報131を取得する。
基準点データ計算部221は、各電子基準点情報131に基づいて、以下の式1により複数の電子基準点130それぞれの擬似距離結合値comb(ρR)をGPS衛星140毎に計算する。添え字「S」はGPS衛星140を意味する。擬似距離ρ1Rに掛ける係数「γ1」(第1の擬似距離係数)と擬似距離ρ2Rに掛ける係数「γ2」(第2の擬似距離係数)との和は「1」になる。
基準点データ計算部221によりGPS衛星140毎に計算される擬似距離結合値comb(ρR)は、いずれか1点の電子基準点130についての値であっても構わない。
例えば、基準点データ計算部221は、第1の電子基準点130(例えば、電子基準点130a)の電子基準点情報131に基づいて、第1のGPS衛星140(例えば、GPS衛星140a)からの測位信号に基づく疑似距離結合値comb(ρ11)、第2のGPS衛星からの測位信号に基づく疑似距離結合値comb(ρ12)、・・・を計算する。
【0036】
【数4】

【0037】
<S230:搬送波位相結合値計算処理の一例>
基準点データ計算部221は、各電子基準点情報131に基づいて、以下の式2により複数の電子基準点130それぞれの搬送波位相結合値comb(φR)をGPS衛星140毎に計算する。搬送波位相φ1Rに掛ける係数「θ1」(第1の搬送波位相係数)と搬送波位相φ2Rに掛ける係数「θ2」(第2の搬送波位相係数)との差の絶対値は「1」になる。
基準点データ計算部221によりGPS衛星140毎に計算される搬送波位相結合値comb(φR)は、いずれか1点の電子基準点130についての値であっても構わない。
例えば、基準点データ計算部221は、第1の電子基準点130(例えば、電子基準点130a)の電子基準点情報131に基づいて、第1のGPS衛星140(例えば、GPS衛星140a)からの測位信号に基づく搬送波位相結合値comb(φ11)、第2のGPS衛星からの測位信号に基づく搬送波位相結合値comb(ρ12)、・・・を計算する。
【0038】
【数5】
【0039】
<S240:補正量計算処理の一例>
補正データ生成部220は、補正データ送信装置記憶部290から複数の電子基準点130それぞれの座標値と複数のGPS衛星140それぞれの軌道情報を取得する。
補正量計算部222は、各電子基準点情報131に基づいて、以下の式3により複数の電子基準点130それぞれの補正量の二重差∇ΔδRを計算する。
【0040】
【数6】
【0041】
ここで、「第1の電子基準点130と第1のGPS衛星140との組み合わせに基づく情報」と「第1の電子基準点130と第2のGPS衛星140との組み合わせに基づく情報」との差を「第1の一重差」という。また、「第2の電子基準点130と第1のGPS衛星140との組み合わせに基づく情報」と「第2の電子基準点130と第2のGPS衛星140との組み合わせに基づく情報」との差を「第2の一重差」という。
式3において記号「∇Δ」で表される二重差は、第1の一重差と第2の一重差との差を意味する。
例えば、式3の「∇ΔERS」は、衛星位置誤差(ERS)の二重差であり、GPS衛星140aからの測位信号に基づく電子基準点130aの衛星位置誤差(Eaa)とGPS衛星140nからの測位信号に基づく電子基準点130aの衛星位置誤差(Ean)との一重差と、GPS衛星140aからの測位信号に基づく電子基準点130bの衛星位置誤差(Eba)とGPS衛星140nからの測位信号に基づく電子基準点130bの衛星位置誤差(Ebn)との一重差との差である。
【0042】
<S250:補正データ送信処理の一例>
補正データ送信部230は、各電子基準点130の座標値、S220において計算された擬似距離結合値comb(ρR)、S230において計算された搬送波位相結合値comb(φR)およびS240において計算された補正量の二重差∇ΔδRを補正データ201として配信する。
補正データ201に含まれる擬似距離結合値comb(ρR)および搬送波位相結合値comb(φR)は、いずれか1点の電子基準点130についての値であっても構わない。
補正データ送信部230は、補正データ201をデータ圧縮して配信してもよい。
【0043】
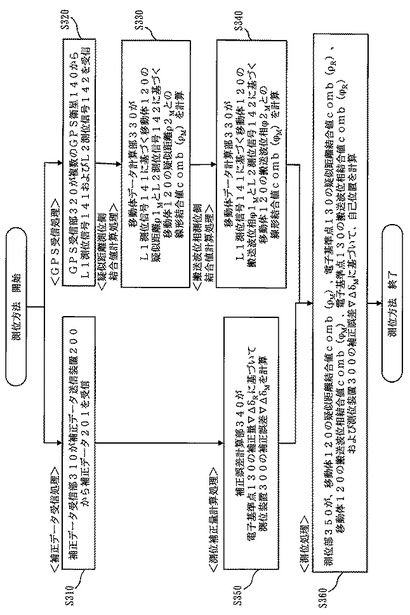
図5は、実施の形態1における測位装置300の測位方法を示すフローチャートである。
実施の形態1における測位装置300の測位方法について、図5に基づいて以下に説明する。
測位装置300の「〜部」は、以下に説明する処理をCPUを用いて実行する。
【0044】
補正データ受信部310は補正データ送信装置200から補正データ201を受信し(S310)、補正誤差計算部340は補正データ201に含まれる電子基準点130の補正量∇ΔδRに基づいて移動体120の補正誤差∇ΔδMを計算する(S350)。
GPS受信部320は複数のGPS衛星140それぞれからL1測位信号141およびL2測位信号142を受信する(S320)。移動体データ計算部330はL1測位信号141に基づく移動体120の擬似距離ρ1MとL2測位信号142に基づく移動体120の擬似距離ρ2Mとの線形結合値comb(ρM)を計算し(S330)、L1測位信号141に基づく移動体120の搬送波位相φ1MとL2測位信号142に基づく移動体120の搬送波位相φ2Mとの線形結合値comb(φM)を計算する(S340)。
測位部350は移動体120の擬似距離結合値comb(ρM)、電子基準点130の擬似距離結合値comb(ρR)、移動体120の搬送波位相結合値comb(φM)、電子基準点130の搬送波位相結合値comb(φR)および補正誤差∇ΔδMに基づいて自己位置を計算する(S360)。
以下に、S310〜S360の詳細について説明する。
【0045】
<S310:補正データ受信処理の一例>
補正データ受信部310は、補正データ送信装置200から補正データ201を受信し、受信した補正データ201を測位装置記憶部390に記憶する。
補正データ201には、少なくともいずれかの電子基準点130の擬似距離結合値comb(ρR)と搬送波位相結合値comb(φR)とがGPS衛星140毎に含まれる。
【0046】
<S320:GPS受信処理の一例>
GPS受信部320は、電子基準点130と同様に、複数のGPS衛星140それぞれからL1測位信号141およびL2測位信号142を受信し、擬似距離ρ1M、擬似距離ρ2M、搬送波位相φ1Mおよび搬送波位相φ2MをGPS衛星140毎に算出する。測位装置300は算出した各値を測位装置記憶部390に記憶する。
さらに、GPS受信部320は、複数のGPS衛星140それぞれからの測位信号の受信結果に基づいて、一般のGPS測位により測位装置300の概略位置を算出する。例えば、GPS受信部320は、4機以上のGPS衛星140それぞれとの擬似距離ρ(ρ1M1、ρ1M2、ρ1M3、ρ1M4、・・・)に基づいて測位装置300の概略位置を算出する。
【0047】
<S330:擬似距離測位側結合値計算処理の一例>
移動体データ計算部330は、測位装置記憶部390から複数のGPS衛星140それぞれの測位信号に基づく擬似距離ρ1Mおよび擬似距離ρ2Mを取得する。
移動体データ計算部330は、補正データ送信装置200と同様に、以下の式4により擬似距離結合値comb(ρM)をGPS衛星140毎に計算する。
【0048】
【数7】
【0049】
<S340:搬送波位相測位側結合値の一例>
移動体データ計算部330は、測位装置記憶部390から複数のGPS衛星140それぞれの測位信号に基づく搬送波位相φ1Mおよび搬送波位相φ2Mを取得する。
移動体データ計算部330は、補正データ送信装置200と同様に、以下の式5により搬送波位相結合値comb(φM)をGPS衛星140毎に計算する。
【0050】
【数8】
【0051】
<S350:測位補正量計算処理の一例>
補正誤差計算部340は、測位装置記憶部390から補正データ201を取得し、取得した補正データ201に含まれる電子基準点130の補正量∇ΔδRに基づいて自己の補正量を補正誤差∇ΔδMとして計算する。
例えば、補正誤差計算部340は、補正量∇ΔδRの対象となった2つの電子基準点130と自己の概略位置に応じて各補正量∇ΔδRを線形補間(外挿・内挿)し、各補正量∇ΔδRを線形補間して得られた値を自己の補正誤差∇ΔδMとする。
【0052】
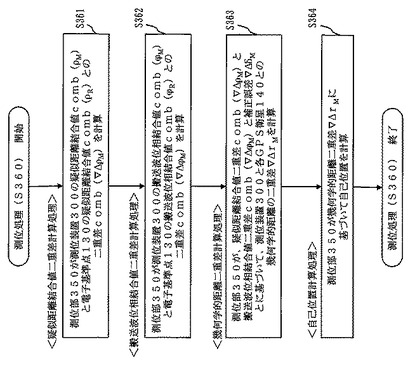
図6は、実施の形態1における測位方法の測位処理(S360)を示すフローチャートである。
実施の形態1における測位方法(図5)の測位処理(S360)について、図6に基づいて以下に説明する。
【0053】
測位部350は、移動体120の擬似距離結合値comb(ρM)と電子基準点130の擬似距離結合値comb(ρR)との二重差comb(∇Δρ)を計算し(S361)、移動体120の搬送波位相結合値comb(φM)と電子基準点130の搬送波位相結合値comb(φR)との二重差comb(∇Δφ)を計算する(S362)。
次に、測位部350は、擬似距離結合値の二重差comb(∇Δρ)と搬送波位相結合値の二重差comb(∇Δφ)と補正誤差∇ΔδMとに基づいて移動体120と複数のGPS衛星140それぞれとの幾何学的距離の二重差∇ΔrMを計算する(S363)。
そして、測位部350は、複数の幾何学的距離の二重差∇ΔrMに基づいて自己位置を計算する(S364)。
以下に、S361〜S364の詳細について説明する。
【0054】
<S361:擬似距離結合値二重差計算処理>
測位部350は、S310において受信された補正データ201に含まれる電子基準点130の擬似距離結合値comb(ρR)とS330において計算された測位装置300の擬似距離結合値comb(ρM)とに基づいて、擬似距離結合値の二重差comb(∇ΔρM)を複数計算する。
例えば、GPS衛星140aからの測位信号に基づく電子基準点130aの擬似距離結合値comb(ρaa)とGPS衛星140nからの測位信号に基づく電子基準点130aの擬似距離結合値comb(ρan)との差(第1の一重差)と、GPS衛星140aからの測位信号に基づく測位装置300の擬似距離結合値comb(ρMa)とGPS衛星140nからの測位信号に基づく測位装置300の擬似距離結合値comb(ρMn)との差(第2の一重差)との差が、擬似距離結合値の二重差comb(∇ΔρM)として計算される。
測位部350により計算される擬似距離結合値の二重差comb(∇ΔρM)の個数は、異なるGPS衛星140の組み合わせで、3つ以上である。
【0055】
<S362:搬送波位相結合値二重差計算処理>
測位部350は、S310において受信された補正データ201に含まれる電子基準点130の搬送波位相結合値comb(φR)とS340において計算された測位装置300の搬送波位相結合値comb(φM)とに基づいて、搬送波位相結合値の二重差comb(∇ΔφM)を複数計算する。
測位部350により計算される搬送波位相結合値の二重差comb(∇ΔφM)の個数は、S361同様、異なるGPS衛星140の組み合わせで3つ以上である。
【0056】
<S363:幾何学的距離二重差計算処理>
測位部350は、S361において計算した複数の擬似距離結合値の二重差comb(∇ΔρM)とS362において計算した複数の搬送波位相結合値の二重差comb(∇ΔφM)とS350において計算された補正誤差∇ΔδMとに基づいて、測位装置300と各GPS衛星140との幾何学的距離(測距値)の二重差∇ΔrMを複数計算する。
【0057】
ここで、擬似距離結合値の二重差comb(∇ΔρM)は、以下の式6で表される。
【0058】
【数9】
【0059】
また、搬送波位相結合値の二重差comb(∇ΔφM)は、以下の式7で表される。
【0060】
【数10】
【0061】
式6と式7とにおいて、擬似距離結合値の二重差comb(∇ΔρM)は搬送波位相結合値の二重差comb(∇ΔφM)の第1項〜第3項と同じである。
そこで、式6に示す擬似距離結合値の二重差comb(∇ΔρM)を式7に示す搬送波位相結合値の二重差comb(∇ΔφM)に代入すると、以下の式8が得られる。
【0062】
【数11】
【0063】
式8を展開することにより以下の式9が得られ、未知数である「∇ΔN1MS−∇ΔN2MS」を計算することができる。「∇ΔN1」はL1測位信号141の搬送波位相バイアスの二重差(整数値)を示し、「∇ΔN2」はL2測位信号142の搬送波位相バイアスの二重差(整数値)を示す。以下、「∇ΔN1MS−∇ΔN2MS」を「∇ΔNMS」と記す。
【0064】
【数12】
【0065】
式9で計算した「∇ΔNMS」を用いて前記式7を展開することにより以下の式10が得られ、測位装置300とGPS衛星140との幾何学的距離の二重差∇ΔrMSを計算することができる。第4項の対流圏遅延量の二重差∇ΔTMSは、所定の数式モデルに基づいて算出される。
【0066】
【数13】
【0067】
測位部350は、上記式10により、測位装置300とGPS衛星140との幾何学的距離の二重差∇ΔrMSを異なるGPS衛星140の組み合わせで3つ以上計算する。
【0068】
<S364:自己位置計算処理>
測位部350は、S363において計算した複数の幾何学的距離の二重差∇ΔrMSを用いて、擬似距離を用いた一般のGPS測位計算と同様に、自己位置を計算する。測位部350は、計算した自己位置を移動体120の位置として測位装置記憶部390に記憶し、また、計算した自己位置を位置情報を用いる各種装置(例えば、カーナビゲーションシステム)に出力する。
【0069】
以下に、実施の形態1における測位用補正データ配信システム100の効果について説明する。
【0070】
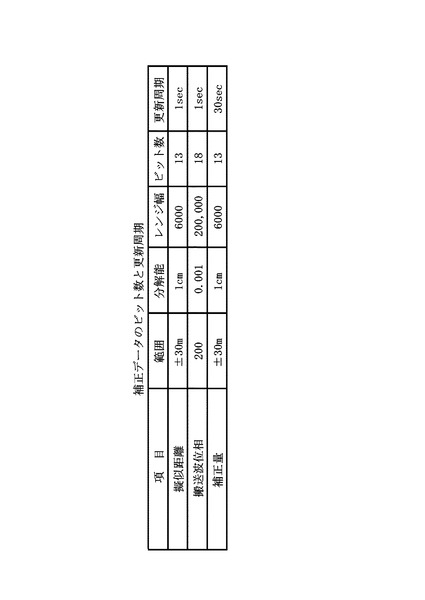
図7は、実施の形態1における補正データのビット数と更新周期を示す表である。
従来から補正データには擬似距離、搬送波位相、補正量が含まれる。
図7に示すように、擬似距離は13ビットで1秒毎に更新され、搬送波位相は18ビットで1秒毎に更新され、補正量は13ビットで30秒毎に更新される。
【0071】
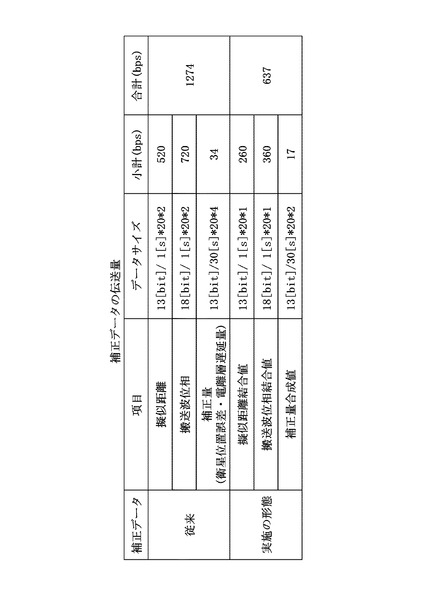
図8は、実施の形態1における補正データの伝送量を示す表である。
従来の補正データの伝送量と実施の形態の補正データの伝送量とについて、図8に基づいて説明する。
従来の補正データにはL1測位信号141に基づく擬似距離とL2測位信号142に基づく擬似距離とが含まれるため、擬似距離に関する補正データの1秒当たりの伝送量は520bpsとなる。一方、実施の形態の擬似距離に関する補正データは、L1測位信号141に基づく擬似距離とL2測位信号142に基づく擬似距離とを結合した擬似距離結合値comb(ρR)であるため、1秒当たりの伝送量が従来の半分の260bpsとなる。
同様に、実施の形態の搬送波位相に関する補正データの伝送量は、従来の伝送量(720bps)の半分の360bpsである。
また、従来の補正データには補正量として衛星位置誤差Eと電離層遅延量Iとが含まれるため、補正量に関する補正データの伝送量は34bpsとなる。一方、実施の形態の補正量に関する補正データは、衛星位置誤差Eと電離層遅延量Iとの合成値∇ΔδRであるため、伝送量が従来の半分の17bpsとなる。
したがって、実施の形態の補正データの伝送量は、637bpsとなり、従来の補正データの伝送量(1274bps)に対して半減する。
【0072】
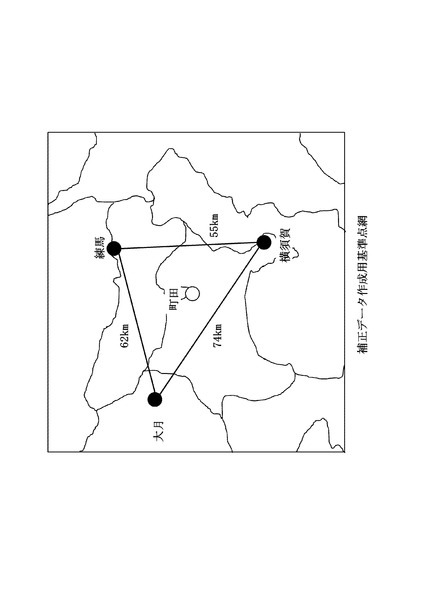
図9は、実施の形態1における補正データ作成用基準点網の一例を示す図である。
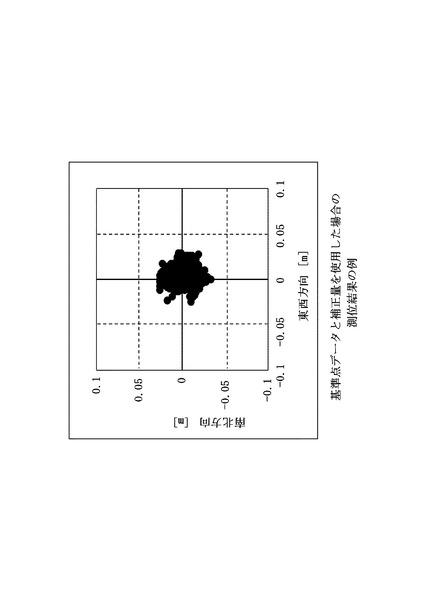
図10は、実施の形態1における補正データ送信装置200により配信された補正データ201を用いて測位した複数の測位結果を示すグラフである。
【0073】
図9に示すように、電子基準点130は大月、横須賀、練馬などに設置されている。大月の電子基準点130aと横須賀の電子基準点130bとの距離は約74km、大月の電子基準点130aと練馬の電子基準点130cとの距離は約62km、横須賀の電子基準点130bと練馬の電子基準点130cとの距離は約55kmである。
本測位実験では、大月と横須賀と練馬との基準点網内に位置する町田において実施の形態1の測位方法により複数回の測位を行った。実施の形態1の測位方法において、大月の電子基準点130aの基準点データ(擬似距離結合値、搬送波位相結合値)を用いた。大月の電子基準点130aと町田の観測点(測位を行った地点)との距離(基線長)は、約46kmである。なお、各電子基準点130の観測データ(擬似距離、搬送波位相など)として、国土地理院の電子基準点データ(2007年4月5日午前7時23分0秒から39分39秒)から抽出した1秒間隔で総エポック数1000のデータを用いた。
【0074】
図10において、従来の測位方法(例えば、RTK)により高精度に計測した測位結果を東西方向「0m」、南北方向「0m」としている。図10は、実施の形態1の複数の測位結果それぞれが従来方法の測位結果に対して位置する相対位置に点を記したものである。
図10に示すように、実施の形態1の測位方法と従来の高精度な測位結果との差は、全ての測位結果で0.05m未満であった。
従来の高精度な測位結果に対する実施の形態1の全ての測位結果の二乗平均誤差は「1.4cm」であり、実施の形態1の測位方法はセンチメートル級の測位精度を実現した。
【0075】
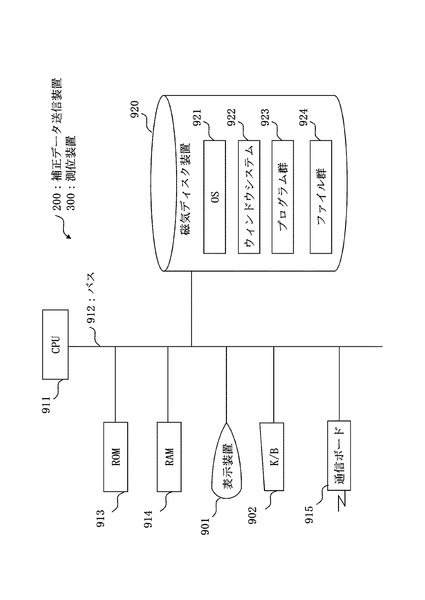
図11は、実施の形態1における補正データ送信装置200および測位装置300のハードウェア資源の一例を示す図である。
図11において、補正データ送信装置200および測位装置300は、プログラムを実行するCPU911(Central・Processing・Unit、中央処理装置、処理装置、演算装置、マイクロプロセッサ、マイクロコンピュータ、プロセッサともいう)を備えている。CPU911は、バス912を介してROM913、RAM914、表示装置901、キーボード902、通信ボード915、磁気ディスク装置920と接続され、これらのハードウェアデバイスを制御する。磁気ディスク装置920の代わりにその他の記憶装置(例えば、RAMやフラッシュメモリなどの半導体メモリ)を用いてもよい。
RAM914は、揮発性メモリの一例である。ROM913、磁気ディスク装置920の記憶媒体は、不揮発性メモリの一例である。これらは、記憶機器、記憶装置あるいは記憶部の一例である。また、入力データが記憶されている記憶機器は入力機器、入力装置あるいは入力部の一例であり、出力データが記憶される記憶機器は出力機器、出力装置あるいは出力部の一例である。
通信ボード915は、入出力機器、入出力装置あるいは入出力部の一例である。
【0076】
通信ボード915は、有線または無線で、LAN(Local Area Network)、インターネット、ISDN等のWAN(ワイドエリアネットワーク)、電話回線などの通信網に接続されている。
【0077】
磁気ディスク装置920には、OS921(オペレーティングシステム)、ウィンドウシステム922、プログラム群923、ファイル群924が記憶されている。プログラム群923のプログラムは、CPU911、OS921、ウィンドウシステム922により実行される。
【0078】
上記プログラム群923には、実施の形態において「〜部」として説明する機能を実行するプログラムが記憶されている。プログラムは、CPU911により読み出され実行される。
【0079】
ファイル群924には、実施の形態において、「〜部」の機能を実行した際の「〜の判定結果」、「〜の計算結果」、「〜の処理結果」などの結果データ、「〜部」の機能を実行するプログラム間で受け渡しするデータ、その他の情報やデータや信号値や変数値やパラメータが、「〜ファイル」や「〜データベース」の各項目として記憶されている。
「〜ファイル」や「〜データベース」は、ディスクやメモリなどの記録媒体に記憶される。ディスクやメモリなどの記憶媒体に記憶された情報やデータや信号値や変数値やパラメータは、読み書き回路を介してCPU911によりメインメモリやキャッシュメモリに読み出され、抽出・検索・参照・比較・演算・計算・処理・出力・印刷・表示などのCPUの動作に用いられる。抽出・検索・参照・比較・演算・計算・処理・出力・印刷・表示のCPUの動作の間、情報やデータや信号値や変数値やパラメータは、メインメモリやキャッシュメモリやバッファメモリに一時的に記憶される。
また、実施の形態において説明するフローチャートの矢印の部分は主としてデータや信号の入出力を示し、データや信号値は、RAM914のメモリ、磁気ディスク装置920の磁気ディスク、その他の記録媒体に記録される。また、データや信号値は、バス912や信号線やケーブルその他の伝送媒体によりオンライン伝送される。
【0080】
また、実施の形態において「〜部」として説明するものは、「〜回路」、「〜装置」、「〜機器」であってもよく、また、「〜ステップ」、「〜手順」、「〜処理」であってもよい。すなわち、「〜部」として説明するものは、ROM913に記憶されたファームウェアで実現されていても構わない。或いは、ソフトウェアのみ、或いは、素子・デバイス・基板・配線などのハードウェアのみ、或いは、ソフトウェアとハードウェアとの組み合わせ、さらには、ファームウェアとの組み合わせで実施されても構わない。ファームウェアとソフトウェアは、プログラムとして、磁気ディスクやその他の記録媒体に記憶される。プログラムはCPU911により読み出され、CPU911により実行される。すなわち、プログラムは、「〜部」としてコンピュータを機能させるものである。あるいは、「〜部」の手順や方法をコンピュータに実行させるものである。
【0081】
実施の形態1では、以下のような補正データ送信装置200について説明した。
補正データ送信装置200の構成は、以下の通り。
(1)複数の電子基準点130が複数のGPS衛星140から受信した信号に基づいて出力する電子基準点情報131を収集して記憶装置(補正データ送信装置記憶部290)に記憶する収集部(源泉データ収集処理部210)。
(2)第1の周波数帯の信号(L1測位信号141)と第2の周波数帯の信号(L2測位信号142)とを線形結合した1つの電子基準点130の擬似距離に関する値(comb(ρR))と、第1の周波数帯の信号と第2の周波数帯の信号とを線形結合した1つの電子基準点130の搬送波位相に関する値(comb(φR))とを計算する計算部(補正データ生成部220)。
(3)1つの電子基準点の擬似距離に関する上記の線形結合した値と、1つの電子基準点の搬送波位相に関する上記の線形結合した値とを、通信装置から送信する送信部(補正データ送信部230)。
【0082】
補正データ送信装置200の計算部の特徴は、以下の通り。
計算部は、第1の周波数帯の信号と第2の周波数帯の信号とを線形結合した1つの電子基準点130の擬似距離に関する値と、第1の周波数帯の信号と第2の周波数帯の信号とを線形結合した1つの電子基準点の搬送波位相に関する値とを計算する。
さらに、計算部は、収集部により収集された電子基準点情報131から、各電子基準点130に固有の誤差量を示す基準点固有誤差(∇ΔδR)を計算する。
【0083】
補正データ送信装置200の送信部の特徴は、以下の通り。
送信部は、1つの電子基準点の擬似距離に関する上記の線形結合した値と、1つの電子基準点の搬送波位相に関する上記の線形結合した値とを送信する。
さらに、送信部は、各電子基準点130に固有の誤差量を示す基準点固有誤差を送信する。
【0084】
補正データ送信装置200の補正データ送信方法の構成は、以下の通り。
(1)複数の電子基準点130が複数のGPS衛星140から受信した信号に基づいて出力する電子基準点情報131を収集する収集ステップ(S210)。
(2)第1の周波数帯の信号と第2の周波数帯の信号とを線形結合した1つの電子基準点130の擬似距離に関する値と、第1の周波数帯の信号と第2の周波数帯の信号とを線形結合した1つの電子基準点の搬送波位相に関する値とを計算する計算ステップ(S220、S230)。
(3)1つの電子基準点の擬似距離に関する上記の線形結合した値と、1つの電子基準点の搬送波位相に関する上記の線形結合した値とを送信するデータ送信ステップ(S250)。
【0085】
補正データ送信装置200の補正データ送信プログラムの構成は、以下の通り。
(1)複数の電子基準点130が複数のGPS衛星140から受信した信号に基づいて出力する電子基準点情報131を収集する収集処理(S210)。
(2)第1の周波数帯の信号と第2の周波数帯の信号とを線形結合した1つの電子基準点の擬似距離に関する値と、第1の周波数帯の信号と第2の周波数帯の信号とを線形結合した1つの電子基準点の搬送波位相に関する値とを計算する計算処理(S220、S230)。
(3)1つの電子基準点の擬似距離に関する上記の線形結合した値と、1つの電子基準点の搬送波位相に関する上記の線形結合した値とを送信するデータ送信処理(S250)。
【0086】
実施の形態1では、以下のような測位装置300について説明した。
測位装置300の構成は、以下の通り。
(1)第1の周波数帯の信号と第2の周波数帯の信号とを線形結合した1つの電子基準点130の擬似距離に関する値と、第1の周波数帯の信号と第2の周波数帯の信号とを線形結合した1つの電子基準点の搬送波位相に関する値とを、補正データ送信装置200から通信装置を介して受信する受信部(補正データ受信部310)。
(2)1つの電子基準点の擬似距離に関する上記の線形結合した値と、1つの電子基準点の搬送波位相に関する上記の線形結合した値とを用いて、処理装置により測位する測位部(測位部350)。
【0087】
測位装置300の受信部の特徴は、以下の通り。
受信部は、第1の周波数帯の信号と第2の周波数帯の信号とを線形結合した1つの電子基準点の擬似距離に関する値と、第1の周波数帯の信号と第2の周波数帯の信号とを線形結合した1つの電子基準点の搬送波位相に関する値とを受信する(S310)。
さらに、受信部は、各電子基準点130に固有の誤差量を示す基準点固有誤差を受信する(S310)。
【0088】
測位装置300の測位部の特徴は、以下の通り。
測位部は、第1の周波数帯の信号と第2の周波数帯の信号とを線形結合した1つの電子基準点130の擬似距離に関する値と、第1の周波数帯の信号と第2の周波数帯の信号とを線形結合した1つの電子基準点の搬送波位相に関する値とを用いて測位する。
このとき、測位部は、各電子基準点130に固有の誤差量を示す基準点固有誤差も用いて測位する。
【0089】
測位装置300の測位方法の構成は、以下の通り。
(1)第1の周波数帯の信号と第2の周波数帯の信号とを線形結合した1つの電子基準点130の擬似距離に関する値と、第1の周波数帯の信号と第2の周波数帯の信号とを線形結合した1つの電子基準点の搬送波位相に関する値とを受信する受信ステップ(S310)。
(2)1つの電子基準点の擬似距離に関する上記の線形結合した値と、1つの電子基準点の搬送波位相に関する上記の線形結合した値とを用いて測位する測位ステップ(S360)。
【0090】
測位装置300の測位プログラムの構成は、以下の通り。
(1)第1の周波数帯の信号と第2の周波数帯の信号とを線形結合した1つの電子基準点の擬似距離に関する値と、第1の周波数帯の信号と第2の周波数帯の信号とを線形結合した1つの電子基準点の搬送波位相に関する値とを受信する受信処理(S310)。
(2)1つの電子基準点の擬似距離に関する上記の線形結合した値と、1つの電子基準点の搬送波位相に関する上記の線形結合した値とを用いて測位する測位処理(S360)。
【0091】
従来、基準点データである擬似距離と搬送波位相とはそれぞれ第1の周波数帯の信号と第2の周波数帯の信号との2種類が配信されていたのに対して、実施の形態に係る補正データ送信装置200は、線形結合したデータ1種類を配信し、データ伝送量を削減している。そして、センチメートル級の測位精度が維持される。
【0092】
従来、補正量は衛星位置誤差と電離層遅延量とが配信されていたのに対して、この実施の形態に係る補正データ送信装置200は、これらを合成したデータ1種類を配信し、データ伝送量を削減している。そして、センチメートル級の測位精度が維持される。
【0093】
なお、補正データ送信装置200は、上記の基準点データに対してデータ圧縮を施してデータ形式を変更するデータ形式変更部を備え、上記データ形式変更部によりデータ形式が変更された基準点データを含む補正データ201を送信してもよい。
【0094】
この実施の形態に係る測位装置300は、搬送波位相の整数値バイアスを決定して測位解を算出しているので、センチメートル級の測位精度を実現する。
【0095】
また、この実施の形態に係る測位装置300は、整数値バイアスの決定において、従来の整数値∇ΔN1と∇ΔN2のそれぞれを決定する代りに、整数値(∇ΔN1−∇ΔN2)のみを決定すればよい。さらに、整数値(N1−N2)に対応する波長は、式11に示すように、θ1×λ1≒86cmとなり、整数値N1に対応する波長(λ1≒19cm)や整数値N2に対応する波長(λ2≒24cm)よりも長くなる。このため、上記整数値(N1−N2)の決定が比較的容易となり、測位解の算出に要する時間が短縮する。
【0096】
また、測位装置300は、補正データ送信装置200から配信される補正量を使用することにより、基線長(電子基準点130と移動体120との距離)が長い場合においても、センチメートル級の測位精度の実現が可能である。
【図面の簡単な説明】
【0097】
【図1】実施の形態1における測位用補正データ配信システム100の構成図。
【図2】実施の形態1における補正データ送信装置200の機能構成図。
【図3】実施の形態1における測位装置300の機能構成図。
【図4】実施の形態1おける補正データ送信装置200の補正データ送信方法を示すフローチャート。
【図5】実施の形態1における測位装置300の測位方法を示すフローチャート。
【図6】実施の形態1における測位方法の測位処理(S360)を示すフローチャート。
【図7】実施の形態1における補正データのビット数と更新周期を示す表。
【図8】実施の形態1における補正データの伝送量を示す表。
【図9】実施の形態1における補正データ作成用基準点網の一例を示す図。
【図10】実施の形態1における補正データ送信装置200により配信された補正データ201を用いて測位した複数の測位結果を示すグラフ。
【図11】実施の形態1における補正データ送信装置200および測位装置300のハードウェア資源の一例を示す図。
【符号の説明】
【0098】
100 測位用補正データ配信システム、110 センター局、120 移動体、130,130a,130b,130c 電子基準点、131 電子基準点情報、140,140a,140n GPS衛星、141 L1測位信号、142 L2測位信号、200 補正データ送信装置、201 補正データ、210 源泉データ収集処理部、220 補正データ生成部、221 基準点データ計算部、222 補正量計算部、230 補正データ送信部、290 補正データ送信装置記憶部、300 測位装置、310 補正データ受信部、320 GPS受信部、330 移動体データ計算部、340 補正誤差計算部、350 測位部、390 測位装置記憶部、901 表示装置、902 キーボード、911 CPU、912 バス、913 ROM、914 RAM、915 通信ボード、920 磁気ディスク装置、921 OS、922 ウィンドウシステム、923 プログラム群、924 ファイル群。
【技術分野】
【0001】
本発明は、例えば、測位に用いられる補正データを送信する補正データ送信装置、補正データ送信方法および補正データ送信プログラムと、補正データを用いて自己位置を測位する測位装置、測位方法および測位プログラムに関するものである。
【背景技術】
【0002】
従来、RTK(Real Time Kinematic)方式のように、GPS(Global Positioning System)衛星等の測位衛星から送信された電波を観測点および基準点で受信し、観測点および基準点で受信したそれぞれの電波の搬送波位相の差を用いてセンチメートル級の精度で測位を行う場合がある。この場合、第1の周波数帯の信号であるL1波(周波数f1=1575.42MHz)のデータと、第2の周波数帯の信号であるL2波(周波数f2=1227.6MHz)のデータとの2つの周波数のデータが用いられる。このため、基準点で受信した擬似距離および搬送波位相の観測データとして2周波のデータが観測点へ配信されていた(特許文献1、特許文献2)。
【0003】
移動体等が高精度測位を行うときに基準点から観測点(移動体)へ配信される補正データの伝送量の削減は、通信回線を有効に利用する上で極めて有用である。
【特許文献1】特開2003−315084号公報
【特許文献2】特開2005−69866号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
本発明は、例えば、センチメートル級の測位精度を維持したままで、基準点から観測点へ配信するデータ伝送量を削減することを目的とする。
【課題を解決するための手段】
【0005】
本発明の補正データ送信装置は、自己位置を測位する測位装置へ、測位に用いられる補正データを送信する補正データ送信装置であり、GPS(Global Positioning System)衛星から第1の周波数帯で送信される第1の搬送波と前記GPS衛星から第2の周波数帯で送信される第2の搬送波とを受信する電子基準点が前記第1の搬送波から得る情報であり前記GPS衛星と前記電子基準点との擬似距離を示す第1の擬似距離と、前記電子基準点が前記第1の搬送波から得る情報であり前記第1の搬送波の位相を示す第1の搬送波位相と、前記電子基準点が前記第2の搬送波から得る情報であり前記GPS衛星と前記電子基準点との擬似距離を示す第2の擬似距離と、前記電子基準点が前記第2の搬送波から得る情報であり前記第2の搬送波の位相を示す第2の搬送波位相とを通信装置を用いて収集する電子基準点情報収集部と、前記電子基準点情報収集部により収集された前記第1の擬似距離と前記電子基準点情報収集部により収集された前記第2の擬似距離とを線形結合した値をCPU(Central Processing Unit)を用いて擬似距離結合値として計算する擬似距離結合値計算部と、前記電子基準点情報収集部により収集された前記第1の搬送波位相と前記電子基準点情報収集部により収集された前記第2の搬送波位相とを線形結合した値をCPUを用いて搬送波位相結合値として計算する搬送波位相結合値計算部と、前記擬似距離結合値計算部により計算された擬似距離結合値と前記搬送波位相結合値計算部により計算された搬送波位相結合値とを含んだデータを前記補正データとして通信装置を用いて前記測位装置へ送信する補正データ送信部とを備える。
【発明の効果】
【0006】
本発明によれば、2つの擬似距離を結合した擬似距離結合値と2つの搬送波位相を結合した搬送波位相結合値とを補正データにすることにより、センチメートル級の測位精度を維持したままで、基準点(電子基準点)から観測点(測位装置)へ配信する補正データの伝送量を削減することができる。
【発明を実施するための最良の形態】
【0007】
実施の形態1.
実施の形態1では、測位に用いられる補正データを測位装置へ配信する測位用補正データ配信システムについて説明する。
補正データとは、後述するように、各GPS衛星に関する基準点データおよび補正量を含むデータである。
【0008】
図1は、実施の形態1における測位用補正データ配信システム100の構成図である。
実施の形態1における測位用補正データ配信システム100の構成について、図1に基づいて以下に説明する。
【0009】
測位用補正データ配信システム100は、センター局110の補正データ送信装置200、複数のGPS衛星140(人工衛星)および複数の電子基準点130を備える。
【0010】
まず、測位用補正データ配信システム100による補正データ201の配信方法および各移動体120の測位装置300による測位方法の概要について説明する。
複数のGPS衛星140(140a、・・・、140n)はそれぞれL1測位信号141およびL2測位信号142を発信し(S110)、複数の電子基準点130(130a、130b、130c、・・・)はそれぞれL1測位信号141およびL2測位信号142から得た電子基準点情報131をセンター局110の補正データ送信装置200に送信する(S120)。
補正データ送信装置200は、電子基準点情報131に基づいて補正データ201を生成し(S130)、生成した補正データ201を配信する(S140)。
各移動体120の測位装置300は、補正データ送信装置200から配信された補正データ201を用いてGPS測位時に補正を行い、移動体120の位置を測位する(S150)。
【0011】
補正データ201には、各電子基準点130で観測された(1)L1測位信号141から得られた擬似距離(2)L2測位信号142から得られた擬似距離(3)L1測位信号141から得られた搬送波位相(4)L2測位信号142から得られた搬送波位相が含まれる。
さらに、補正データ201には、各電子基準点130による観測時の(5)衛星位置誤差(6)電離層遅延量が含まれる。
【0012】
補正データ送信装置200は、(1)L1測位信号141から得られる擬似距離と(2)L2測位信号142から得られる擬似距離とを線形結合させて補正データ201に含めることにより、補正データ201の擬似距離に関するデータ量を半減させる。
さらに、補正データ送信装置200は、(3)L1測位信号141から得られた搬送波位相と(4)L2測位信号142から得られた搬送波位相とを線形結合させて補正データ201に含めることにより、補正データ201の搬送波位相に関するデータ量を半減させる。
さらに、補正データ送信装置200は、(5)衛星位置誤差と(6)電離層遅延量との合成値を補正データ201に含めることにより、補正データ201の補正量(衛星位置誤差、電離層遅延量)に関するデータ量を半減させる。
これにより、測位用補正データ配信システム100は補正データ201の配信時の伝送量を半減させ、通信回線の負荷を軽減することができる。
【0013】
次に、測位用補正データ配信システム100の各構成の詳細について説明する。
【0014】
複数のGPS衛星140(140a、・・・、140n)はそれぞれ、周波数が1575.42MHz(以下、「f1」と記す)であるL1波と呼ばれる電波(以下、「L1測位信号141」という)と、周波数が1227.6MHz(以下、「f2」と記す)であるL2波と呼ばれる電波(以下、「L2測位信号142」という)とを発信する。
L1測位信号141(第1の搬送波)およびL2測位信号142(第2の搬送波)は、各GPS衛星140の軌道などを示す測位情報(「航法メッセージ」ともいう)を搬送する。
【0015】
複数の電子基準点130(130a、130b、130c、・・・)はそれぞれ、複数のGPS衛星140それぞれからL1測位信号141およびL2測位信号142を受信する。
各電子基準点130は、L1測位信号141の受信結果に基づいて、GPS衛星140と自己との擬似距離ρ1R(第1の擬似距離)およびL1測位信号141の搬送波位相φ1R(第1の搬送波位相)を算出する。さらに、各電子基準点130は、L2測位信号142の受信結果に基づいて、GPS衛星140と自己との擬似距離ρ2R(第2の擬似距離)およびL2測位信号142の搬送波位相φ2R(第2の搬送波位相)を算出する。添え字「R」は、電子基準点130の情報であることを意味する。
そして、各電子基準点130は、自己の識別情報、観測データ(擬似距離ρ1R、擬似距離ρ2R、搬送波位相φ1R、搬送波位相φ2R)などを含む電子基準点情報131を補正データ送信装置200に送信する。観測データには、GPS衛星140aから発信された測位信号に基づく疑似距離・搬送波位相、GPS衛星140nから発信された測位信号に基づく疑似距離・搬送波位相など、複数のGPS衛星140それぞれの測位信号に基づく疑似距離・搬送波位相が含まれる。
なお、電子基準点130は位置(座標値)が既知である。
【0016】
補正データ送信装置200は、複数の電子基準点130それぞれから電子基準点情報131を受信する。
補正データ送信装置200は、受信した電子基準点情報131に基づいて、擬似距離ρ1Rと擬似距離ρ2Rとを線形結合した擬似距離結合値comb(ρR)を算出すると共に、搬送波位相φ1Rと搬送波位相φ2Rとを線形結合した搬送波位相結合値comb(φR)を算出する。
さらに、補正データ送信装置200は、受信した電子基準点情報131に基づいて、擬似距離結合値comb(ρR)および搬送波位相結合値comb(φR)に含まれる2つの誤差である衛星位置誤差ERと電離層遅延量IRとを合成させた合成値に相当する値を二重差で補正量∇ΔδR(基準点側補正量)として算出する。補正量∇ΔδRは、衛星位置誤差ERと電離層遅延量IRとの2つの誤差の補正に用いられる。
そして、補正データ送信装置200は、基準点データ(擬似距離結合値comb(ρR)、搬送波位相結合値comb(φR))と補正量∇ΔδRとを含む補正データ201を配信する。補正データ201には、複数の電子基準点130(130a、130b、130c、・・・)それぞれの電子基準点情報131に基づく基準点データおよび補正量∇ΔδRが含まれる。
【0017】
各移動体120に備わる測位装置300は、補正データ送信装置200から配信された補正データ201を受信する。
測位装置300は、電子基準点130と同様に、複数のGPS衛星140それぞれからL1測位信号141およびL2測位信号142を受信し、擬似距離ρ1M(第1の測位側擬似距離)、擬似距離ρ2M(第2の測位側擬似距離)、搬送波位相φ1M(第1の測位側搬送波位相)および搬送波位相φ2M(第2の測位側搬送波位相)を算出する。添え字「M」は、移動体120の情報であることを意味する。
測位装置300は、補正データ送信装置200と同様に、擬似距離結合値comb(ρM)と搬送波位相結合値comb(φM)とを算出する。
測位装置300は、補正データ201に含まれる各電子基準点130の補正量∇ΔδRに基づいて、自己の補正量を算出する。以下、測位装置300の補正量(測位側補正量)を「補正誤差∇ΔδM」という。
そして、測位装置300は、擬似距離結合値comb(ρM)、搬送波位相結合値comb(φM)、補正誤差∇ΔδM、擬似距離結合値comb(ρR)および搬送波位相結合値comb(φR)に基づいて、移動体120が位置する地点の座標を測位する。
【0018】
図2は、実施の形態1における補正データ送信装置200の機能構成図である。
センター局110に設けられる補正データ送信装置200の機能構成について、図2に基づいて以下に説明する。
【0019】
補正データ送信装置200は、源泉データ収集処理部210、補正データ生成部220、補正データ送信部230および補正データ送信装置記憶部290を備える。
【0020】
源泉データ収集処理部210(電子基準点情報収集部)は、複数の電子基準点130(130a、130b、・・・)それぞれから電子基準点情報131を通信装置を用いて収集する。
電子基準点情報131には、擬似距離ρ1R、擬似距離ρ2R、搬送波位相φ1R、搬送波位相φ2Rなどが含まれる。
【0021】
補正データ生成部220は、基準点データ計算部221および補正量計算部222を備え、補正データ201を生成する。
基準点データ計算部221(擬似距離結合値計算部)は、源泉データ収集処理部210により収集された電子基準点情報131に基づいて、擬似距離ρ1Rと擬似距離ρ2Rとを線形結合した値をCPU(Central Processing Unit)を用いて擬似距離結合値comb(ρR)として計算する。
さらに、基準点データ計算部221(搬送波位相結合値計算部)は、源泉データ収集処理部210により収集された電子基準点情報131に基づいて、搬送波位相φ1Rと搬送波位相φ2Rとを線形結合した値をCPUを用いて搬送波位相結合値comb(φR)として計算する。
補正量計算部222(基準点側補正量計算部)は、擬似距離結合値comb(ρR)および搬送波位相結合値comb(φR)に含まれる誤差を補正する補正量∇ΔδRをCPUを用いて計算する。
【0022】
補正データ送信部230は、補正データ生成部220により計算された擬似距離結合値comb(ρR)、搬送波位相結合値comb(φR)および補正量∇ΔδRを含んだデータを補正データ201として通信装置を用いて移動体120の測位装置300へ送信する。
【0023】
補正データ送信装置記憶部290は、補正データ送信装置200で使用される各種データを記憶媒体を用いて記憶する。
例えば、補正データ送信装置記憶部290は、源泉データ収集処理部210により収集された電子基準点情報131や補正データ生成部220により計算された各値を記憶し、また、各電子基準点130の座標値や各GPS衛星140の軌道などの情報が予め記憶される。
【0024】
図3は、実施の形態1における測位装置300の機能構成図である。
実施の形態1における測位装置300の機能構成について、図3に基づいて以下に説明する。
【0025】
測位装置300は、補正データ受信部310、GPS受信部320、移動体データ計算部330、補正誤差計算部340、測位部350および測位装置記憶部390を備える。
【0026】
補正データ受信部310は、センター局110の補正データ送信装置200により送信された補正データ201を通信装置を用いて受信する。
【0027】
GPS受信部320は、複数のGPS衛星140(140a、・・・、140n)それぞれからL1測位信号141とL2測位信号142とをGPS受信機を用いて受信する。
そして、GPS受信部320は、受信したL1測位信号141から擬似距離ρ1Mと搬送波位相φ1Mとを取得すると共に、受信したL2測位信号142から擬似距離ρ2Mと搬送波位相φ2Mとを取得する。さらに、GPS受信部320は、疑似距離に基づいて概略位置を測位する。
GPS受信部320のこれらの機能は、一般的なGPS受信機の機能と同じである。
【0028】
移動体データ計算部330(擬似距離測位側結合値計算部)は、擬似距離ρ1Mと擬似距離ρ2Mとを線形結合した値をCPUを用いて擬似距離結合値comb(ρM)として計算する。
さらに、移動体データ計算部330(搬送波位相測位側結合値計算部)は、搬送波位相φ1Mと搬送波位相φ2Mとを線形結合した値をCPUを用いて搬送波位相結合値comb(φM)として計算する。
【0029】
補正誤差計算部340(測位側補正量計算部)は、補正データ受信部310により受信された補正データ201に含まれる補正量∇ΔδRに基づいて擬似距離結合値comb(ρM)および搬送波位相結合値comb(φM)に含まれる誤差を補正する補正量を補正誤差∇ΔδMとしてCPUを用いて計算する。
【0030】
測位部350は、擬似距離結合値comb(ρM)、搬送波位相結合値comb(φM)、補正誤差∇ΔδM、擬似距離結合値comb(ρR)および搬送波位相結合値comb(φR)に基づいて、自己位置をCPUを用いて計算する。
【0031】
測位装置記憶部390は、測位装置300で使用される各種データを記憶媒体を用いて記憶する。
例えば、測位装置記憶部390は、補正データ受信部310により受信された補正データ201、GPS受信部320により取得された擬似距離や搬送波位相、移動体データ計算部330により計算された擬似距離結合値comb(ρM)や搬送波位相結合値comb(φM)、補正誤差計算部340により計算された補正誤差∇ΔδM、測位部350により計算された自己位置を記憶する。
【0032】
図4は、実施の形態1おける補正データ送信装置200の補正データ送信方法を示すフローチャートである。
実施の形態1における補正データ送信装置200の補正データ送信方法について、図4に基づいて以下に説明する。
補正データ送信装置200の各「〜部」は、以下に説明する処理をCPUを用いて実行する。
【0033】
まず、源泉データ収集処理部210は複数の電子基準点130それぞれから電子基準点情報131を受信する(S210)。
次に、基準点データ計算部221は、各電子基準点情報131に基づいて、擬似距離結合値comb(ρR)を計算し(S220)、搬送波位相結合値comb(φR)を計算する(S230)。
また、補正量計算部222は、各電子基準点情報131に基づいて、補正量∇ΔδRを計算する(S240)。
そして、補正データ送信部230は擬似距離結合値comb(ρR)、搬送波位相結合値comb(φR)および補正量∇ΔδRを含めて補正データ201を配信する(S250)。
以下に、S210〜S250の詳細について説明する。
【0034】
<S210:電子基準点情報収集処理の一例>
源泉データ収集処理部210は、複数の電子基準点130それぞれから電子基準点情報131を受信し、受信した電子基準点情報131を補正データ送信装置記憶部290に記憶する。
各電子基準点情報131には、電子基準点130それぞれの識別情報および観測データ(擬似距離ρ1R、擬似距離ρ2R、搬送波位相φ1R、搬送波位相φ2R)が含まれる。観測データは測位信号を発信したGPS衛星140毎に含まれる。
【0035】
<S220:擬似距離結合値計算処理の一例>
補正データ生成部220は、補正データ送信装置記憶部290から複数の電子基準点130それぞれの電子基準点情報131を取得する。
基準点データ計算部221は、各電子基準点情報131に基づいて、以下の式1により複数の電子基準点130それぞれの擬似距離結合値comb(ρR)をGPS衛星140毎に計算する。添え字「S」はGPS衛星140を意味する。擬似距離ρ1Rに掛ける係数「γ1」(第1の擬似距離係数)と擬似距離ρ2Rに掛ける係数「γ2」(第2の擬似距離係数)との和は「1」になる。
基準点データ計算部221によりGPS衛星140毎に計算される擬似距離結合値comb(ρR)は、いずれか1点の電子基準点130についての値であっても構わない。
例えば、基準点データ計算部221は、第1の電子基準点130(例えば、電子基準点130a)の電子基準点情報131に基づいて、第1のGPS衛星140(例えば、GPS衛星140a)からの測位信号に基づく疑似距離結合値comb(ρ11)、第2のGPS衛星からの測位信号に基づく疑似距離結合値comb(ρ12)、・・・を計算する。
【0036】
【数4】
【0037】
<S230:搬送波位相結合値計算処理の一例>
基準点データ計算部221は、各電子基準点情報131に基づいて、以下の式2により複数の電子基準点130それぞれの搬送波位相結合値comb(φR)をGPS衛星140毎に計算する。搬送波位相φ1Rに掛ける係数「θ1」(第1の搬送波位相係数)と搬送波位相φ2Rに掛ける係数「θ2」(第2の搬送波位相係数)との差の絶対値は「1」になる。
基準点データ計算部221によりGPS衛星140毎に計算される搬送波位相結合値comb(φR)は、いずれか1点の電子基準点130についての値であっても構わない。
例えば、基準点データ計算部221は、第1の電子基準点130(例えば、電子基準点130a)の電子基準点情報131に基づいて、第1のGPS衛星140(例えば、GPS衛星140a)からの測位信号に基づく搬送波位相結合値comb(φ11)、第2のGPS衛星からの測位信号に基づく搬送波位相結合値comb(ρ12)、・・・を計算する。
【0038】
【数5】
【0039】
<S240:補正量計算処理の一例>
補正データ生成部220は、補正データ送信装置記憶部290から複数の電子基準点130それぞれの座標値と複数のGPS衛星140それぞれの軌道情報を取得する。
補正量計算部222は、各電子基準点情報131に基づいて、以下の式3により複数の電子基準点130それぞれの補正量の二重差∇ΔδRを計算する。
【0040】
【数6】
【0041】
ここで、「第1の電子基準点130と第1のGPS衛星140との組み合わせに基づく情報」と「第1の電子基準点130と第2のGPS衛星140との組み合わせに基づく情報」との差を「第1の一重差」という。また、「第2の電子基準点130と第1のGPS衛星140との組み合わせに基づく情報」と「第2の電子基準点130と第2のGPS衛星140との組み合わせに基づく情報」との差を「第2の一重差」という。
式3において記号「∇Δ」で表される二重差は、第1の一重差と第2の一重差との差を意味する。
例えば、式3の「∇ΔERS」は、衛星位置誤差(ERS)の二重差であり、GPS衛星140aからの測位信号に基づく電子基準点130aの衛星位置誤差(Eaa)とGPS衛星140nからの測位信号に基づく電子基準点130aの衛星位置誤差(Ean)との一重差と、GPS衛星140aからの測位信号に基づく電子基準点130bの衛星位置誤差(Eba)とGPS衛星140nからの測位信号に基づく電子基準点130bの衛星位置誤差(Ebn)との一重差との差である。
【0042】
<S250:補正データ送信処理の一例>
補正データ送信部230は、各電子基準点130の座標値、S220において計算された擬似距離結合値comb(ρR)、S230において計算された搬送波位相結合値comb(φR)およびS240において計算された補正量の二重差∇ΔδRを補正データ201として配信する。
補正データ201に含まれる擬似距離結合値comb(ρR)および搬送波位相結合値comb(φR)は、いずれか1点の電子基準点130についての値であっても構わない。
補正データ送信部230は、補正データ201をデータ圧縮して配信してもよい。
【0043】
図5は、実施の形態1における測位装置300の測位方法を示すフローチャートである。
実施の形態1における測位装置300の測位方法について、図5に基づいて以下に説明する。
測位装置300の「〜部」は、以下に説明する処理をCPUを用いて実行する。
【0044】
補正データ受信部310は補正データ送信装置200から補正データ201を受信し(S310)、補正誤差計算部340は補正データ201に含まれる電子基準点130の補正量∇ΔδRに基づいて移動体120の補正誤差∇ΔδMを計算する(S350)。
GPS受信部320は複数のGPS衛星140それぞれからL1測位信号141およびL2測位信号142を受信する(S320)。移動体データ計算部330はL1測位信号141に基づく移動体120の擬似距離ρ1MとL2測位信号142に基づく移動体120の擬似距離ρ2Mとの線形結合値comb(ρM)を計算し(S330)、L1測位信号141に基づく移動体120の搬送波位相φ1MとL2測位信号142に基づく移動体120の搬送波位相φ2Mとの線形結合値comb(φM)を計算する(S340)。
測位部350は移動体120の擬似距離結合値comb(ρM)、電子基準点130の擬似距離結合値comb(ρR)、移動体120の搬送波位相結合値comb(φM)、電子基準点130の搬送波位相結合値comb(φR)および補正誤差∇ΔδMに基づいて自己位置を計算する(S360)。
以下に、S310〜S360の詳細について説明する。
【0045】
<S310:補正データ受信処理の一例>
補正データ受信部310は、補正データ送信装置200から補正データ201を受信し、受信した補正データ201を測位装置記憶部390に記憶する。
補正データ201には、少なくともいずれかの電子基準点130の擬似距離結合値comb(ρR)と搬送波位相結合値comb(φR)とがGPS衛星140毎に含まれる。
【0046】
<S320:GPS受信処理の一例>
GPS受信部320は、電子基準点130と同様に、複数のGPS衛星140それぞれからL1測位信号141およびL2測位信号142を受信し、擬似距離ρ1M、擬似距離ρ2M、搬送波位相φ1Mおよび搬送波位相φ2MをGPS衛星140毎に算出する。測位装置300は算出した各値を測位装置記憶部390に記憶する。
さらに、GPS受信部320は、複数のGPS衛星140それぞれからの測位信号の受信結果に基づいて、一般のGPS測位により測位装置300の概略位置を算出する。例えば、GPS受信部320は、4機以上のGPS衛星140それぞれとの擬似距離ρ(ρ1M1、ρ1M2、ρ1M3、ρ1M4、・・・)に基づいて測位装置300の概略位置を算出する。
【0047】
<S330:擬似距離測位側結合値計算処理の一例>
移動体データ計算部330は、測位装置記憶部390から複数のGPS衛星140それぞれの測位信号に基づく擬似距離ρ1Mおよび擬似距離ρ2Mを取得する。
移動体データ計算部330は、補正データ送信装置200と同様に、以下の式4により擬似距離結合値comb(ρM)をGPS衛星140毎に計算する。
【0048】
【数7】
【0049】
<S340:搬送波位相測位側結合値の一例>
移動体データ計算部330は、測位装置記憶部390から複数のGPS衛星140それぞれの測位信号に基づく搬送波位相φ1Mおよび搬送波位相φ2Mを取得する。
移動体データ計算部330は、補正データ送信装置200と同様に、以下の式5により搬送波位相結合値comb(φM)をGPS衛星140毎に計算する。
【0050】
【数8】
【0051】
<S350:測位補正量計算処理の一例>
補正誤差計算部340は、測位装置記憶部390から補正データ201を取得し、取得した補正データ201に含まれる電子基準点130の補正量∇ΔδRに基づいて自己の補正量を補正誤差∇ΔδMとして計算する。
例えば、補正誤差計算部340は、補正量∇ΔδRの対象となった2つの電子基準点130と自己の概略位置に応じて各補正量∇ΔδRを線形補間(外挿・内挿)し、各補正量∇ΔδRを線形補間して得られた値を自己の補正誤差∇ΔδMとする。
【0052】
図6は、実施の形態1における測位方法の測位処理(S360)を示すフローチャートである。
実施の形態1における測位方法(図5)の測位処理(S360)について、図6に基づいて以下に説明する。
【0053】
測位部350は、移動体120の擬似距離結合値comb(ρM)と電子基準点130の擬似距離結合値comb(ρR)との二重差comb(∇Δρ)を計算し(S361)、移動体120の搬送波位相結合値comb(φM)と電子基準点130の搬送波位相結合値comb(φR)との二重差comb(∇Δφ)を計算する(S362)。
次に、測位部350は、擬似距離結合値の二重差comb(∇Δρ)と搬送波位相結合値の二重差comb(∇Δφ)と補正誤差∇ΔδMとに基づいて移動体120と複数のGPS衛星140それぞれとの幾何学的距離の二重差∇ΔrMを計算する(S363)。
そして、測位部350は、複数の幾何学的距離の二重差∇ΔrMに基づいて自己位置を計算する(S364)。
以下に、S361〜S364の詳細について説明する。
【0054】
<S361:擬似距離結合値二重差計算処理>
測位部350は、S310において受信された補正データ201に含まれる電子基準点130の擬似距離結合値comb(ρR)とS330において計算された測位装置300の擬似距離結合値comb(ρM)とに基づいて、擬似距離結合値の二重差comb(∇ΔρM)を複数計算する。
例えば、GPS衛星140aからの測位信号に基づく電子基準点130aの擬似距離結合値comb(ρaa)とGPS衛星140nからの測位信号に基づく電子基準点130aの擬似距離結合値comb(ρan)との差(第1の一重差)と、GPS衛星140aからの測位信号に基づく測位装置300の擬似距離結合値comb(ρMa)とGPS衛星140nからの測位信号に基づく測位装置300の擬似距離結合値comb(ρMn)との差(第2の一重差)との差が、擬似距離結合値の二重差comb(∇ΔρM)として計算される。
測位部350により計算される擬似距離結合値の二重差comb(∇ΔρM)の個数は、異なるGPS衛星140の組み合わせで、3つ以上である。
【0055】
<S362:搬送波位相結合値二重差計算処理>
測位部350は、S310において受信された補正データ201に含まれる電子基準点130の搬送波位相結合値comb(φR)とS340において計算された測位装置300の搬送波位相結合値comb(φM)とに基づいて、搬送波位相結合値の二重差comb(∇ΔφM)を複数計算する。
測位部350により計算される搬送波位相結合値の二重差comb(∇ΔφM)の個数は、S361同様、異なるGPS衛星140の組み合わせで3つ以上である。
【0056】
<S363:幾何学的距離二重差計算処理>
測位部350は、S361において計算した複数の擬似距離結合値の二重差comb(∇ΔρM)とS362において計算した複数の搬送波位相結合値の二重差comb(∇ΔφM)とS350において計算された補正誤差∇ΔδMとに基づいて、測位装置300と各GPS衛星140との幾何学的距離(測距値)の二重差∇ΔrMを複数計算する。
【0057】
ここで、擬似距離結合値の二重差comb(∇ΔρM)は、以下の式6で表される。
【0058】
【数9】
【0059】
また、搬送波位相結合値の二重差comb(∇ΔφM)は、以下の式7で表される。
【0060】
【数10】
【0061】
式6と式7とにおいて、擬似距離結合値の二重差comb(∇ΔρM)は搬送波位相結合値の二重差comb(∇ΔφM)の第1項〜第3項と同じである。
そこで、式6に示す擬似距離結合値の二重差comb(∇ΔρM)を式7に示す搬送波位相結合値の二重差comb(∇ΔφM)に代入すると、以下の式8が得られる。
【0062】
【数11】
【0063】
式8を展開することにより以下の式9が得られ、未知数である「∇ΔN1MS−∇ΔN2MS」を計算することができる。「∇ΔN1」はL1測位信号141の搬送波位相バイアスの二重差(整数値)を示し、「∇ΔN2」はL2測位信号142の搬送波位相バイアスの二重差(整数値)を示す。以下、「∇ΔN1MS−∇ΔN2MS」を「∇ΔNMS」と記す。
【0064】
【数12】
【0065】
式9で計算した「∇ΔNMS」を用いて前記式7を展開することにより以下の式10が得られ、測位装置300とGPS衛星140との幾何学的距離の二重差∇ΔrMSを計算することができる。第4項の対流圏遅延量の二重差∇ΔTMSは、所定の数式モデルに基づいて算出される。
【0066】
【数13】
【0067】
測位部350は、上記式10により、測位装置300とGPS衛星140との幾何学的距離の二重差∇ΔrMSを異なるGPS衛星140の組み合わせで3つ以上計算する。
【0068】
<S364:自己位置計算処理>
測位部350は、S363において計算した複数の幾何学的距離の二重差∇ΔrMSを用いて、擬似距離を用いた一般のGPS測位計算と同様に、自己位置を計算する。測位部350は、計算した自己位置を移動体120の位置として測位装置記憶部390に記憶し、また、計算した自己位置を位置情報を用いる各種装置(例えば、カーナビゲーションシステム)に出力する。
【0069】
以下に、実施の形態1における測位用補正データ配信システム100の効果について説明する。
【0070】
図7は、実施の形態1における補正データのビット数と更新周期を示す表である。
従来から補正データには擬似距離、搬送波位相、補正量が含まれる。
図7に示すように、擬似距離は13ビットで1秒毎に更新され、搬送波位相は18ビットで1秒毎に更新され、補正量は13ビットで30秒毎に更新される。
【0071】
図8は、実施の形態1における補正データの伝送量を示す表である。
従来の補正データの伝送量と実施の形態の補正データの伝送量とについて、図8に基づいて説明する。
従来の補正データにはL1測位信号141に基づく擬似距離とL2測位信号142に基づく擬似距離とが含まれるため、擬似距離に関する補正データの1秒当たりの伝送量は520bpsとなる。一方、実施の形態の擬似距離に関する補正データは、L1測位信号141に基づく擬似距離とL2測位信号142に基づく擬似距離とを結合した擬似距離結合値comb(ρR)であるため、1秒当たりの伝送量が従来の半分の260bpsとなる。
同様に、実施の形態の搬送波位相に関する補正データの伝送量は、従来の伝送量(720bps)の半分の360bpsである。
また、従来の補正データには補正量として衛星位置誤差Eと電離層遅延量Iとが含まれるため、補正量に関する補正データの伝送量は34bpsとなる。一方、実施の形態の補正量に関する補正データは、衛星位置誤差Eと電離層遅延量Iとの合成値∇ΔδRであるため、伝送量が従来の半分の17bpsとなる。
したがって、実施の形態の補正データの伝送量は、637bpsとなり、従来の補正データの伝送量(1274bps)に対して半減する。
【0072】
図9は、実施の形態1における補正データ作成用基準点網の一例を示す図である。
図10は、実施の形態1における補正データ送信装置200により配信された補正データ201を用いて測位した複数の測位結果を示すグラフである。
【0073】
図9に示すように、電子基準点130は大月、横須賀、練馬などに設置されている。大月の電子基準点130aと横須賀の電子基準点130bとの距離は約74km、大月の電子基準点130aと練馬の電子基準点130cとの距離は約62km、横須賀の電子基準点130bと練馬の電子基準点130cとの距離は約55kmである。
本測位実験では、大月と横須賀と練馬との基準点網内に位置する町田において実施の形態1の測位方法により複数回の測位を行った。実施の形態1の測位方法において、大月の電子基準点130aの基準点データ(擬似距離結合値、搬送波位相結合値)を用いた。大月の電子基準点130aと町田の観測点(測位を行った地点)との距離(基線長)は、約46kmである。なお、各電子基準点130の観測データ(擬似距離、搬送波位相など)として、国土地理院の電子基準点データ(2007年4月5日午前7時23分0秒から39分39秒)から抽出した1秒間隔で総エポック数1000のデータを用いた。
【0074】
図10において、従来の測位方法(例えば、RTK)により高精度に計測した測位結果を東西方向「0m」、南北方向「0m」としている。図10は、実施の形態1の複数の測位結果それぞれが従来方法の測位結果に対して位置する相対位置に点を記したものである。
図10に示すように、実施の形態1の測位方法と従来の高精度な測位結果との差は、全ての測位結果で0.05m未満であった。
従来の高精度な測位結果に対する実施の形態1の全ての測位結果の二乗平均誤差は「1.4cm」であり、実施の形態1の測位方法はセンチメートル級の測位精度を実現した。
【0075】
図11は、実施の形態1における補正データ送信装置200および測位装置300のハードウェア資源の一例を示す図である。
図11において、補正データ送信装置200および測位装置300は、プログラムを実行するCPU911(Central・Processing・Unit、中央処理装置、処理装置、演算装置、マイクロプロセッサ、マイクロコンピュータ、プロセッサともいう)を備えている。CPU911は、バス912を介してROM913、RAM914、表示装置901、キーボード902、通信ボード915、磁気ディスク装置920と接続され、これらのハードウェアデバイスを制御する。磁気ディスク装置920の代わりにその他の記憶装置(例えば、RAMやフラッシュメモリなどの半導体メモリ)を用いてもよい。
RAM914は、揮発性メモリの一例である。ROM913、磁気ディスク装置920の記憶媒体は、不揮発性メモリの一例である。これらは、記憶機器、記憶装置あるいは記憶部の一例である。また、入力データが記憶されている記憶機器は入力機器、入力装置あるいは入力部の一例であり、出力データが記憶される記憶機器は出力機器、出力装置あるいは出力部の一例である。
通信ボード915は、入出力機器、入出力装置あるいは入出力部の一例である。
【0076】
通信ボード915は、有線または無線で、LAN(Local Area Network)、インターネット、ISDN等のWAN(ワイドエリアネットワーク)、電話回線などの通信網に接続されている。
【0077】
磁気ディスク装置920には、OS921(オペレーティングシステム)、ウィンドウシステム922、プログラム群923、ファイル群924が記憶されている。プログラム群923のプログラムは、CPU911、OS921、ウィンドウシステム922により実行される。
【0078】
上記プログラム群923には、実施の形態において「〜部」として説明する機能を実行するプログラムが記憶されている。プログラムは、CPU911により読み出され実行される。
【0079】
ファイル群924には、実施の形態において、「〜部」の機能を実行した際の「〜の判定結果」、「〜の計算結果」、「〜の処理結果」などの結果データ、「〜部」の機能を実行するプログラム間で受け渡しするデータ、その他の情報やデータや信号値や変数値やパラメータが、「〜ファイル」や「〜データベース」の各項目として記憶されている。
「〜ファイル」や「〜データベース」は、ディスクやメモリなどの記録媒体に記憶される。ディスクやメモリなどの記憶媒体に記憶された情報やデータや信号値や変数値やパラメータは、読み書き回路を介してCPU911によりメインメモリやキャッシュメモリに読み出され、抽出・検索・参照・比較・演算・計算・処理・出力・印刷・表示などのCPUの動作に用いられる。抽出・検索・参照・比較・演算・計算・処理・出力・印刷・表示のCPUの動作の間、情報やデータや信号値や変数値やパラメータは、メインメモリやキャッシュメモリやバッファメモリに一時的に記憶される。
また、実施の形態において説明するフローチャートの矢印の部分は主としてデータや信号の入出力を示し、データや信号値は、RAM914のメモリ、磁気ディスク装置920の磁気ディスク、その他の記録媒体に記録される。また、データや信号値は、バス912や信号線やケーブルその他の伝送媒体によりオンライン伝送される。
【0080】
また、実施の形態において「〜部」として説明するものは、「〜回路」、「〜装置」、「〜機器」であってもよく、また、「〜ステップ」、「〜手順」、「〜処理」であってもよい。すなわち、「〜部」として説明するものは、ROM913に記憶されたファームウェアで実現されていても構わない。或いは、ソフトウェアのみ、或いは、素子・デバイス・基板・配線などのハードウェアのみ、或いは、ソフトウェアとハードウェアとの組み合わせ、さらには、ファームウェアとの組み合わせで実施されても構わない。ファームウェアとソフトウェアは、プログラムとして、磁気ディスクやその他の記録媒体に記憶される。プログラムはCPU911により読み出され、CPU911により実行される。すなわち、プログラムは、「〜部」としてコンピュータを機能させるものである。あるいは、「〜部」の手順や方法をコンピュータに実行させるものである。
【0081】
実施の形態1では、以下のような補正データ送信装置200について説明した。
補正データ送信装置200の構成は、以下の通り。
(1)複数の電子基準点130が複数のGPS衛星140から受信した信号に基づいて出力する電子基準点情報131を収集して記憶装置(補正データ送信装置記憶部290)に記憶する収集部(源泉データ収集処理部210)。
(2)第1の周波数帯の信号(L1測位信号141)と第2の周波数帯の信号(L2測位信号142)とを線形結合した1つの電子基準点130の擬似距離に関する値(comb(ρR))と、第1の周波数帯の信号と第2の周波数帯の信号とを線形結合した1つの電子基準点130の搬送波位相に関する値(comb(φR))とを計算する計算部(補正データ生成部220)。
(3)1つの電子基準点の擬似距離に関する上記の線形結合した値と、1つの電子基準点の搬送波位相に関する上記の線形結合した値とを、通信装置から送信する送信部(補正データ送信部230)。
【0082】
補正データ送信装置200の計算部の特徴は、以下の通り。
計算部は、第1の周波数帯の信号と第2の周波数帯の信号とを線形結合した1つの電子基準点130の擬似距離に関する値と、第1の周波数帯の信号と第2の周波数帯の信号とを線形結合した1つの電子基準点の搬送波位相に関する値とを計算する。
さらに、計算部は、収集部により収集された電子基準点情報131から、各電子基準点130に固有の誤差量を示す基準点固有誤差(∇ΔδR)を計算する。
【0083】
補正データ送信装置200の送信部の特徴は、以下の通り。
送信部は、1つの電子基準点の擬似距離に関する上記の線形結合した値と、1つの電子基準点の搬送波位相に関する上記の線形結合した値とを送信する。
さらに、送信部は、各電子基準点130に固有の誤差量を示す基準点固有誤差を送信する。
【0084】
補正データ送信装置200の補正データ送信方法の構成は、以下の通り。
(1)複数の電子基準点130が複数のGPS衛星140から受信した信号に基づいて出力する電子基準点情報131を収集する収集ステップ(S210)。
(2)第1の周波数帯の信号と第2の周波数帯の信号とを線形結合した1つの電子基準点130の擬似距離に関する値と、第1の周波数帯の信号と第2の周波数帯の信号とを線形結合した1つの電子基準点の搬送波位相に関する値とを計算する計算ステップ(S220、S230)。
(3)1つの電子基準点の擬似距離に関する上記の線形結合した値と、1つの電子基準点の搬送波位相に関する上記の線形結合した値とを送信するデータ送信ステップ(S250)。
【0085】
補正データ送信装置200の補正データ送信プログラムの構成は、以下の通り。
(1)複数の電子基準点130が複数のGPS衛星140から受信した信号に基づいて出力する電子基準点情報131を収集する収集処理(S210)。
(2)第1の周波数帯の信号と第2の周波数帯の信号とを線形結合した1つの電子基準点の擬似距離に関する値と、第1の周波数帯の信号と第2の周波数帯の信号とを線形結合した1つの電子基準点の搬送波位相に関する値とを計算する計算処理(S220、S230)。
(3)1つの電子基準点の擬似距離に関する上記の線形結合した値と、1つの電子基準点の搬送波位相に関する上記の線形結合した値とを送信するデータ送信処理(S250)。
【0086】
実施の形態1では、以下のような測位装置300について説明した。
測位装置300の構成は、以下の通り。
(1)第1の周波数帯の信号と第2の周波数帯の信号とを線形結合した1つの電子基準点130の擬似距離に関する値と、第1の周波数帯の信号と第2の周波数帯の信号とを線形結合した1つの電子基準点の搬送波位相に関する値とを、補正データ送信装置200から通信装置を介して受信する受信部(補正データ受信部310)。
(2)1つの電子基準点の擬似距離に関する上記の線形結合した値と、1つの電子基準点の搬送波位相に関する上記の線形結合した値とを用いて、処理装置により測位する測位部(測位部350)。
【0087】
測位装置300の受信部の特徴は、以下の通り。
受信部は、第1の周波数帯の信号と第2の周波数帯の信号とを線形結合した1つの電子基準点の擬似距離に関する値と、第1の周波数帯の信号と第2の周波数帯の信号とを線形結合した1つの電子基準点の搬送波位相に関する値とを受信する(S310)。
さらに、受信部は、各電子基準点130に固有の誤差量を示す基準点固有誤差を受信する(S310)。
【0088】
測位装置300の測位部の特徴は、以下の通り。
測位部は、第1の周波数帯の信号と第2の周波数帯の信号とを線形結合した1つの電子基準点130の擬似距離に関する値と、第1の周波数帯の信号と第2の周波数帯の信号とを線形結合した1つの電子基準点の搬送波位相に関する値とを用いて測位する。
このとき、測位部は、各電子基準点130に固有の誤差量を示す基準点固有誤差も用いて測位する。
【0089】
測位装置300の測位方法の構成は、以下の通り。
(1)第1の周波数帯の信号と第2の周波数帯の信号とを線形結合した1つの電子基準点130の擬似距離に関する値と、第1の周波数帯の信号と第2の周波数帯の信号とを線形結合した1つの電子基準点の搬送波位相に関する値とを受信する受信ステップ(S310)。
(2)1つの電子基準点の擬似距離に関する上記の線形結合した値と、1つの電子基準点の搬送波位相に関する上記の線形結合した値とを用いて測位する測位ステップ(S360)。
【0090】
測位装置300の測位プログラムの構成は、以下の通り。
(1)第1の周波数帯の信号と第2の周波数帯の信号とを線形結合した1つの電子基準点の擬似距離に関する値と、第1の周波数帯の信号と第2の周波数帯の信号とを線形結合した1つの電子基準点の搬送波位相に関する値とを受信する受信処理(S310)。
(2)1つの電子基準点の擬似距離に関する上記の線形結合した値と、1つの電子基準点の搬送波位相に関する上記の線形結合した値とを用いて測位する測位処理(S360)。
【0091】
従来、基準点データである擬似距離と搬送波位相とはそれぞれ第1の周波数帯の信号と第2の周波数帯の信号との2種類が配信されていたのに対して、実施の形態に係る補正データ送信装置200は、線形結合したデータ1種類を配信し、データ伝送量を削減している。そして、センチメートル級の測位精度が維持される。
【0092】
従来、補正量は衛星位置誤差と電離層遅延量とが配信されていたのに対して、この実施の形態に係る補正データ送信装置200は、これらを合成したデータ1種類を配信し、データ伝送量を削減している。そして、センチメートル級の測位精度が維持される。
【0093】
なお、補正データ送信装置200は、上記の基準点データに対してデータ圧縮を施してデータ形式を変更するデータ形式変更部を備え、上記データ形式変更部によりデータ形式が変更された基準点データを含む補正データ201を送信してもよい。
【0094】
この実施の形態に係る測位装置300は、搬送波位相の整数値バイアスを決定して測位解を算出しているので、センチメートル級の測位精度を実現する。
【0095】
また、この実施の形態に係る測位装置300は、整数値バイアスの決定において、従来の整数値∇ΔN1と∇ΔN2のそれぞれを決定する代りに、整数値(∇ΔN1−∇ΔN2)のみを決定すればよい。さらに、整数値(N1−N2)に対応する波長は、式11に示すように、θ1×λ1≒86cmとなり、整数値N1に対応する波長(λ1≒19cm)や整数値N2に対応する波長(λ2≒24cm)よりも長くなる。このため、上記整数値(N1−N2)の決定が比較的容易となり、測位解の算出に要する時間が短縮する。
【0096】
また、測位装置300は、補正データ送信装置200から配信される補正量を使用することにより、基線長(電子基準点130と移動体120との距離)が長い場合においても、センチメートル級の測位精度の実現が可能である。
【図面の簡単な説明】
【0097】
【図1】実施の形態1における測位用補正データ配信システム100の構成図。
【図2】実施の形態1における補正データ送信装置200の機能構成図。
【図3】実施の形態1における測位装置300の機能構成図。
【図4】実施の形態1おける補正データ送信装置200の補正データ送信方法を示すフローチャート。
【図5】実施の形態1における測位装置300の測位方法を示すフローチャート。
【図6】実施の形態1における測位方法の測位処理(S360)を示すフローチャート。
【図7】実施の形態1における補正データのビット数と更新周期を示す表。
【図8】実施の形態1における補正データの伝送量を示す表。
【図9】実施の形態1における補正データ作成用基準点網の一例を示す図。
【図10】実施の形態1における補正データ送信装置200により配信された補正データ201を用いて測位した複数の測位結果を示すグラフ。
【図11】実施の形態1における補正データ送信装置200および測位装置300のハードウェア資源の一例を示す図。
【符号の説明】
【0098】
100 測位用補正データ配信システム、110 センター局、120 移動体、130,130a,130b,130c 電子基準点、131 電子基準点情報、140,140a,140n GPS衛星、141 L1測位信号、142 L2測位信号、200 補正データ送信装置、201 補正データ、210 源泉データ収集処理部、220 補正データ生成部、221 基準点データ計算部、222 補正量計算部、230 補正データ送信部、290 補正データ送信装置記憶部、300 測位装置、310 補正データ受信部、320 GPS受信部、330 移動体データ計算部、340 補正誤差計算部、350 測位部、390 測位装置記憶部、901 表示装置、902 キーボード、911 CPU、912 バス、913 ROM、914 RAM、915 通信ボード、920 磁気ディスク装置、921 OS、922 ウィンドウシステム、923 プログラム群、924 ファイル群。
【特許請求の範囲】
【請求項1】
自己位置を測位する測位装置へ、測位に用いられる補正データを送信する補正データ送信装置であり、
GPS(Global Positioning System)衛星から第1の周波数帯で送信される第1の搬送波と前記GPS衛星から第2の周波数帯で送信される第2の搬送波とを受信する電子基準点が前記第1の搬送波から得る情報であり前記GPS衛星と前記電子基準点との擬似距離を示す第1の擬似距離と、前記電子基準点が前記第1の搬送波から得る情報であり前記第1の搬送波の位相を示す第1の搬送波位相と、前記電子基準点が前記第2の搬送波から得る情報であり前記GPS衛星と前記電子基準点との擬似距離を示す第2の擬似距離と、前記電子基準点が前記第2の搬送波から得る情報であり前記第2の搬送波の位相を示す第2の搬送波位相とを通信装置を用いて収集する電子基準点情報収集部と、
前記電子基準点情報収集部により収集された前記第1の擬似距離と前記電子基準点情報収集部により収集された前記第2の擬似距離とを線形結合した値をCPU(Central Processing Unit)を用いて擬似距離結合値として計算する擬似距離結合値計算部と、
前記電子基準点情報収集部により収集された前記第1の搬送波位相と前記電子基準点情報収集部により収集された前記第2の搬送波位相とを線形結合した値をCPUを用いて搬送波位相結合値として計算する搬送波位相結合値計算部と、
前記擬似距離結合値計算部により計算された擬似距離結合値と前記搬送波位相結合値計算部により計算された搬送波位相結合値とを含んだデータを前記補正データとして通信装置を用いて前記測位装置へ送信する補正データ送信部と
を備えたことを特徴とする補正データ送信装置。
【請求項2】
前記擬似距離結合値計算部は、前記第1の搬送波の周波数と前記第2の搬送波の周波数とに基づいて前記第1の擬似距離に掛ける係数を第1の擬似距離係数として計算すると共に前記第1の搬送波の周波数と前記第2の搬送波の周波数とに基づいて前記第2の擬似距離に掛ける係数を第2の擬似距離係数として計算し、前記第1の擬似距離と前記第2の擬似距離と前記第1の擬似距離係数と前記第2の擬似距離係数とに基づいて前記擬似距離結合値を計算し、
前記搬送波位相結合値計算部は、前記第1の搬送波の周波数と前記第2の搬送波の周波数とに基づいて前記第1の搬送波位相に掛ける係数を第1の搬送波位相係数として計算すると共に前記第1の搬送波の周波数と前記第2の搬送波の周波数とに基づいて前記第2の搬送波位相に掛ける係数を第2の搬送波位相係数として計算し、前記第1の搬送波位相と前記第2の搬送波位相と前記第1の搬送波位相係数と前記第2の搬送波位相係数とに基づいて前記搬送波位相結合値を計算する
ことを特徴とする請求項1記載の補正データ送信装置。
【請求項3】
前記擬似距離結合値計算部は、前記第1の擬似距離と前記第1の擬似距離係数との積と、前記第2の擬似距離と前記第2の擬似距離係数との積との和を前記擬似距離結合値として計算し、
前記搬送波位相結合値計算部は、前記第1の搬送波位相と前記第1の搬送波位相係数との積と、前記第2の搬送波位相と前記第2の搬送波位相係数との積との差を前記搬送波位相結合値として計算する
ことを特徴とする請求項2記載の補正データ送信装置。
【請求項4】
前記第1の擬似距離係数と前記第2の擬似距離係数との和が「1」であり、前記第1の搬送波位相係数と前記第2の搬送波位相係数との差の絶対値が「1」である
ことを特徴とする請求項3記載の補正データ送信装置。
【請求項5】
前記擬似距離結合値計算部は、以下の式Aに基づいて前記第1の擬似距離ρ1Rsと前記第2の擬似距離ρ2Rsとを線形結合した前記擬似距離結合値comb(ρRs)を計算し、
前記搬送波位相結合値計算部は、以下の式Bに基づいて前記第1の搬送波位相φ1Rsと前記第2の搬送波位相φ2Rsとを線形結合した前記搬送波位相結合値comb(φRs)を計算する
ことを特徴とする請求項1〜請求項4いずれかに記載の補正データ送信装置。
【数1】
【請求項6】
前記補正データ送信装置は、
前記擬似距離結合値に含まれる誤差を補正する補正量を基準点側補正量としてCPUを用いて計算する基準点側補正量計算部を備え、
前記補正データ送信部は、前記基準点側補正量計算部により計算された基準点側補正量を含めて前記補正データを前記測位装置へ送信する
ことを特徴とする請求項1〜請求項5いずれかに記載の補正データ送信装置。
【請求項7】
前記基準点側補正量計算部は、前記GPS衛星の衛星位置誤差と電離層遅延量との合成値に相当する値を前記基準点側補正量として計算する
ことを特徴とする請求項6記載の補正データ送信装置。
【請求項8】
前記基準点側補正量計算部は、以下の式Cに基づいて前記基準点側補正量を二重差∇ΔδRsで計算する
ことを特徴とする請求項6〜請求項7いずれかに記載の補正データ送信装置。
【数2】
【請求項9】
自己位置を測位する測位装置へ、測位に用いられる補正データを送信する補正データ送信装置の補正データ送信方法であり、
電子基準点情報収集部が、GPS(Global Positioning System)衛星から第1の周波数帯で送信される第1の搬送波と前記GPS衛星から第2の周波数帯で送信される第2の搬送波とを受信する電子基準点が前記第1の搬送波から得る情報であり前記GPS衛星と前記電子基準点との擬似距離を示す第1の擬似距離と、前記電子基準点が前記第1の搬送波から得る情報であり前記第1の搬送波の位相を示す第1の搬送波位相と、前記電子基準点が前記第2の搬送波から得る情報であり前記GPS衛星と前記電子基準点との擬似距離を示す第2の擬似距離と、前記電子基準点が前記第2の搬送波から得る情報であり前記第2の搬送波の位相を示す第2の搬送波位相とを通信装置を用いて収集する電子基準点情報収集処理を実行し、
擬似距離結合値計算部が、前記電子基準点情報収集部により収集された前記第1の擬似距離と前記電子基準点情報収集部により収集された前記第2の擬似距離とを線形結合した値をCPU(Central Processing Unit)を用いて擬似距離結合値として計算する擬似距離結合値計算処理を実行し、
搬送波位相結合値計算部が、前記電子基準点情報収集部により収集された前記第1の搬送波位相と前記電子基準点情報収集部により収集された前記第2の搬送波位相とを線形結合した値をCPUを用いて搬送波位相結合値として計算する搬送波位相結合値計算処理を実行し、
補正データ送信部が、前記擬似距離結合値計算部により計算された擬似距離結合値と前記搬送波位相結合値計算部により計算された搬送波位相結合値とを含んだデータを前記補正データとして通信装置を用いて前記測位装置へ送信する補正データ送信処理を実行することを特徴とする補正データ送信装置の補正データ送信方法。
【請求項10】
請求項9記載の補正データ送信方法をコンピュータに実行させる補正データ送信プログラム。
【請求項11】
自己位置を測位する測位装置であり、
請求項1〜請求項8いずれかに記載の補正データ送信装置により送信された前記補正データを通信装置を用いて受信する補正データ受信部と、
前記GPS衛星から前記第1の搬送波と前記第2の搬送波とを通信装置を用いて受信し、受信した前記第1の搬送波から前記GPS衛星と自己位置との擬似距離を示す第1の測位側擬似距離と前記第1の搬送波の位相を示す第1の測位側搬送波位相とを取得すると共に、受信した前記第2の搬送波から前記GPS衛星と自己位置との擬似距離を示す第2の測位側擬似距離と前記第2の搬送波の位相を示す第2の測位側搬送波位相とを取得するGPS受信部と、
前記GPS受信部により取得された前記第1の測位側擬似距離と前記GPS受信部により取得された前記第2の測位側擬似距離とを線形結合した値をCPUを用いて擬似距離測位側結合値として計算する擬似距離測位側結合値計算部と、
前記GPS受信部により取得された前記第1の測位側搬送波位相と前記GPS受信部により取得された前記第2の測位側搬送波位相とを線形結合した値をCPUを用いて搬送波位相測位側結合値として計算する搬送波位相測位側結合値計算部と、
前記補正データ受信部により受信された補正データに含まれる擬似距離結合値と、前記補正データ受信部により受信された補正データに含まれる搬送波位相結合値と、前記擬似距離測位側結合値計算部により計算された擬似距離測位側結合値と、前記搬送波位相測位側結合値計算部により計算された搬送波位相測位側結合値とに基づいて、自己位置をCPUを用いて計算する測位部と
を備えたことを特徴とする測位装置。
【請求項12】
前記補正データ送信装置は、前記擬似距離結合値として第1のGPS衛星からの搬送波に基づく第1の擬似距離結合値と第2のGPS衛星からの搬送波に基づく第2の擬似距離結合値とを前記補正データに含めると共に、前記搬送波位相結合値として第1のGPS衛星からの搬送波に基づく第1の搬送波位相結合値と第2のGPS衛星からの搬送波に基づく第2の搬送波位相結合値とを前記補正データに含めて前記補正データを前記測位装置に送信し、
前記擬似距離測位側結合値計算部は、前記擬似距離測位側結合値として第1のGPS衛星からの搬送波に基づく第1の擬似距離測位側結合値と第2のGPS衛星からの搬送波に基づく第2の擬似距離測位側結合値とを計算し、
前記搬送波位相測位側結合値計算部は、前記搬送波位相測位側結合値として第1のGPS衛星からの搬送波に基づく第1の搬送波位相測位側結合値と第2のGPS衛星からの搬送波に基づく第2の搬送波位相測位側結合値とを計算し、
前記測位部は、前記第1の擬似距離結合値と前記第2の擬似距離結合値との一重差と前記第1の擬似距離測位側結合値と前記第2の擬似距離測位側結合値との一重差とに基づく二重差の値を擬似距離結合値の二重差として計算し、前記第1の搬送波位相結合値と前記第2の搬送波位相結合値との一重差と前記第1の搬送波位相測位側結合値と前記第2の搬送波位相測位側結合値との一重差とに基づく二重差の値を搬送波位相結合値の二重差として計算し、前記擬似距離結合値の二重差と前記搬送波位相結合値の二重差とに基づいて自己位置を計算する
ことを特徴とする請求項11記載の測位装置。
【請求項13】
前記補正データ送信装置は、前記擬似距離結合値に含まれる誤差を補正する補正量を基準点側補正量として含めて前記補正データを前記測位装置に送信し、
前記測位部は、前記補正データに含まれる前記基準点側補正量に基づいて自己位置を計算する
ことを特徴とする請求項11〜請求項12いずれかに記載の測位装置。
【請求項14】
前記測位装置は、
前記補正データに含まれる前記基準点側補正量に基づいて前記擬似距離測位側結合値に含まれる誤差を補正する補正量を測位側補正量としてCPUを用いて計算する測位側補正量計算部を備え、
前記測位部は、前記測位側補正量計算部により計算された測位側補正量に基づいて自己位置を計算する
ことを特徴とする請求項13記載の測位装置。
【請求項15】
前記補正データ送信装置は、複数の電子基準点それぞれの前記基準点側補正量を含めて前記補正データを送信し、
前記測位側補正量計算部は、前記測位装置の概略位置と前記複数の電子基準点それぞれの位置との位置関係に基づいて、複数の電子基準点それぞれの前記基準点側補正量を用いた線形補間により前記測位側補正量を計算する
ことを特徴とする請求項14記載の測位装置。
【請求項16】
前記測位部は、以下の式Dに基づいて前記GPS衛星との幾何学的距離の二重差∇ΔrMsを算出し、算出した幾何学的距離の二重差∇ΔrMsに基づいて自己位置を計算する
ことを特徴とする請求項11〜請求項15いずれかに記載の測位装置。
【数3】
【請求項17】
自己位置を測位する測位装置の測位方法であり、
補正データ受信部が、請求項1〜請求項8いずれかに記載の補正データ送信装置により送信された前記補正データを通信装置を用いて受信する補正データ受信処理を実行し、
GPS受信部が、前記GPS衛星から前記第1の搬送波と前記第2の搬送波とを通信装置を用いて受信し、受信した前記第1の搬送波から前記GPS衛星と自己位置との擬似距離を示す第1の測位側擬似距離と前記第1の搬送波の位相を示す第1の測位側搬送波位相とを取得すると共に、受信した前記第2の搬送波から前記GPS衛星と自己位置との擬似距離を示す第2の測位側擬似距離と前記第2の搬送波の位相を示す第2の測位側搬送波位相とを取得するGPS受信処理を実行し、
擬似距離測位側結合値計算部が、前記GPS受信部により取得された前記第1の測位側擬似距離と前記GPS受信部により取得された前記第2の測位側擬似距離とを線形結合した値をCPUを用いて擬似距離測位側結合値として計算する擬似距離測位側結合値計算処理を実行し、
搬送波位相測位側結合値計算部が、前記GPS受信部により取得された前記第1の測位側搬送波位相と前記GPS受信部により取得された前記第2の測位側搬送波位相とを線形結合した値をCPUを用いて搬送波位相測位側結合値として計算する搬送波位相測位側結合値計算処理を実行し、
測位部が、前記補正データ受信部により受信された補正データに含まれる擬似距離結合値と、前記補正データ受信部により受信された補正データに含まれる搬送波位相結合値と、前記擬似距離測位側結合値計算部により計算された擬似距離測位側結合値と、前記搬送波位相測位側結合値計算部により計算された搬送波位相測位側結合値とに基づいて、自己位置をCPUを用いて計算する測位処理を実行する
ことを特徴とする測位装置の測位方法。
【請求項18】
請求項17記載の測位方法をコンピュータに実行させる測位プログラム。
【請求項1】
自己位置を測位する測位装置へ、測位に用いられる補正データを送信する補正データ送信装置であり、
GPS(Global Positioning System)衛星から第1の周波数帯で送信される第1の搬送波と前記GPS衛星から第2の周波数帯で送信される第2の搬送波とを受信する電子基準点が前記第1の搬送波から得る情報であり前記GPS衛星と前記電子基準点との擬似距離を示す第1の擬似距離と、前記電子基準点が前記第1の搬送波から得る情報であり前記第1の搬送波の位相を示す第1の搬送波位相と、前記電子基準点が前記第2の搬送波から得る情報であり前記GPS衛星と前記電子基準点との擬似距離を示す第2の擬似距離と、前記電子基準点が前記第2の搬送波から得る情報であり前記第2の搬送波の位相を示す第2の搬送波位相とを通信装置を用いて収集する電子基準点情報収集部と、
前記電子基準点情報収集部により収集された前記第1の擬似距離と前記電子基準点情報収集部により収集された前記第2の擬似距離とを線形結合した値をCPU(Central Processing Unit)を用いて擬似距離結合値として計算する擬似距離結合値計算部と、
前記電子基準点情報収集部により収集された前記第1の搬送波位相と前記電子基準点情報収集部により収集された前記第2の搬送波位相とを線形結合した値をCPUを用いて搬送波位相結合値として計算する搬送波位相結合値計算部と、
前記擬似距離結合値計算部により計算された擬似距離結合値と前記搬送波位相結合値計算部により計算された搬送波位相結合値とを含んだデータを前記補正データとして通信装置を用いて前記測位装置へ送信する補正データ送信部と
を備えたことを特徴とする補正データ送信装置。
【請求項2】
前記擬似距離結合値計算部は、前記第1の搬送波の周波数と前記第2の搬送波の周波数とに基づいて前記第1の擬似距離に掛ける係数を第1の擬似距離係数として計算すると共に前記第1の搬送波の周波数と前記第2の搬送波の周波数とに基づいて前記第2の擬似距離に掛ける係数を第2の擬似距離係数として計算し、前記第1の擬似距離と前記第2の擬似距離と前記第1の擬似距離係数と前記第2の擬似距離係数とに基づいて前記擬似距離結合値を計算し、
前記搬送波位相結合値計算部は、前記第1の搬送波の周波数と前記第2の搬送波の周波数とに基づいて前記第1の搬送波位相に掛ける係数を第1の搬送波位相係数として計算すると共に前記第1の搬送波の周波数と前記第2の搬送波の周波数とに基づいて前記第2の搬送波位相に掛ける係数を第2の搬送波位相係数として計算し、前記第1の搬送波位相と前記第2の搬送波位相と前記第1の搬送波位相係数と前記第2の搬送波位相係数とに基づいて前記搬送波位相結合値を計算する
ことを特徴とする請求項1記載の補正データ送信装置。
【請求項3】
前記擬似距離結合値計算部は、前記第1の擬似距離と前記第1の擬似距離係数との積と、前記第2の擬似距離と前記第2の擬似距離係数との積との和を前記擬似距離結合値として計算し、
前記搬送波位相結合値計算部は、前記第1の搬送波位相と前記第1の搬送波位相係数との積と、前記第2の搬送波位相と前記第2の搬送波位相係数との積との差を前記搬送波位相結合値として計算する
ことを特徴とする請求項2記載の補正データ送信装置。
【請求項4】
前記第1の擬似距離係数と前記第2の擬似距離係数との和が「1」であり、前記第1の搬送波位相係数と前記第2の搬送波位相係数との差の絶対値が「1」である
ことを特徴とする請求項3記載の補正データ送信装置。
【請求項5】
前記擬似距離結合値計算部は、以下の式Aに基づいて前記第1の擬似距離ρ1Rsと前記第2の擬似距離ρ2Rsとを線形結合した前記擬似距離結合値comb(ρRs)を計算し、
前記搬送波位相結合値計算部は、以下の式Bに基づいて前記第1の搬送波位相φ1Rsと前記第2の搬送波位相φ2Rsとを線形結合した前記搬送波位相結合値comb(φRs)を計算する
ことを特徴とする請求項1〜請求項4いずれかに記載の補正データ送信装置。
【数1】
【請求項6】
前記補正データ送信装置は、
前記擬似距離結合値に含まれる誤差を補正する補正量を基準点側補正量としてCPUを用いて計算する基準点側補正量計算部を備え、
前記補正データ送信部は、前記基準点側補正量計算部により計算された基準点側補正量を含めて前記補正データを前記測位装置へ送信する
ことを特徴とする請求項1〜請求項5いずれかに記載の補正データ送信装置。
【請求項7】
前記基準点側補正量計算部は、前記GPS衛星の衛星位置誤差と電離層遅延量との合成値に相当する値を前記基準点側補正量として計算する
ことを特徴とする請求項6記載の補正データ送信装置。
【請求項8】
前記基準点側補正量計算部は、以下の式Cに基づいて前記基準点側補正量を二重差∇ΔδRsで計算する
ことを特徴とする請求項6〜請求項7いずれかに記載の補正データ送信装置。
【数2】
【請求項9】
自己位置を測位する測位装置へ、測位に用いられる補正データを送信する補正データ送信装置の補正データ送信方法であり、
電子基準点情報収集部が、GPS(Global Positioning System)衛星から第1の周波数帯で送信される第1の搬送波と前記GPS衛星から第2の周波数帯で送信される第2の搬送波とを受信する電子基準点が前記第1の搬送波から得る情報であり前記GPS衛星と前記電子基準点との擬似距離を示す第1の擬似距離と、前記電子基準点が前記第1の搬送波から得る情報であり前記第1の搬送波の位相を示す第1の搬送波位相と、前記電子基準点が前記第2の搬送波から得る情報であり前記GPS衛星と前記電子基準点との擬似距離を示す第2の擬似距離と、前記電子基準点が前記第2の搬送波から得る情報であり前記第2の搬送波の位相を示す第2の搬送波位相とを通信装置を用いて収集する電子基準点情報収集処理を実行し、
擬似距離結合値計算部が、前記電子基準点情報収集部により収集された前記第1の擬似距離と前記電子基準点情報収集部により収集された前記第2の擬似距離とを線形結合した値をCPU(Central Processing Unit)を用いて擬似距離結合値として計算する擬似距離結合値計算処理を実行し、
搬送波位相結合値計算部が、前記電子基準点情報収集部により収集された前記第1の搬送波位相と前記電子基準点情報収集部により収集された前記第2の搬送波位相とを線形結合した値をCPUを用いて搬送波位相結合値として計算する搬送波位相結合値計算処理を実行し、
補正データ送信部が、前記擬似距離結合値計算部により計算された擬似距離結合値と前記搬送波位相結合値計算部により計算された搬送波位相結合値とを含んだデータを前記補正データとして通信装置を用いて前記測位装置へ送信する補正データ送信処理を実行することを特徴とする補正データ送信装置の補正データ送信方法。
【請求項10】
請求項9記載の補正データ送信方法をコンピュータに実行させる補正データ送信プログラム。
【請求項11】
自己位置を測位する測位装置であり、
請求項1〜請求項8いずれかに記載の補正データ送信装置により送信された前記補正データを通信装置を用いて受信する補正データ受信部と、
前記GPS衛星から前記第1の搬送波と前記第2の搬送波とを通信装置を用いて受信し、受信した前記第1の搬送波から前記GPS衛星と自己位置との擬似距離を示す第1の測位側擬似距離と前記第1の搬送波の位相を示す第1の測位側搬送波位相とを取得すると共に、受信した前記第2の搬送波から前記GPS衛星と自己位置との擬似距離を示す第2の測位側擬似距離と前記第2の搬送波の位相を示す第2の測位側搬送波位相とを取得するGPS受信部と、
前記GPS受信部により取得された前記第1の測位側擬似距離と前記GPS受信部により取得された前記第2の測位側擬似距離とを線形結合した値をCPUを用いて擬似距離測位側結合値として計算する擬似距離測位側結合値計算部と、
前記GPS受信部により取得された前記第1の測位側搬送波位相と前記GPS受信部により取得された前記第2の測位側搬送波位相とを線形結合した値をCPUを用いて搬送波位相測位側結合値として計算する搬送波位相測位側結合値計算部と、
前記補正データ受信部により受信された補正データに含まれる擬似距離結合値と、前記補正データ受信部により受信された補正データに含まれる搬送波位相結合値と、前記擬似距離測位側結合値計算部により計算された擬似距離測位側結合値と、前記搬送波位相測位側結合値計算部により計算された搬送波位相測位側結合値とに基づいて、自己位置をCPUを用いて計算する測位部と
を備えたことを特徴とする測位装置。
【請求項12】
前記補正データ送信装置は、前記擬似距離結合値として第1のGPS衛星からの搬送波に基づく第1の擬似距離結合値と第2のGPS衛星からの搬送波に基づく第2の擬似距離結合値とを前記補正データに含めると共に、前記搬送波位相結合値として第1のGPS衛星からの搬送波に基づく第1の搬送波位相結合値と第2のGPS衛星からの搬送波に基づく第2の搬送波位相結合値とを前記補正データに含めて前記補正データを前記測位装置に送信し、
前記擬似距離測位側結合値計算部は、前記擬似距離測位側結合値として第1のGPS衛星からの搬送波に基づく第1の擬似距離測位側結合値と第2のGPS衛星からの搬送波に基づく第2の擬似距離測位側結合値とを計算し、
前記搬送波位相測位側結合値計算部は、前記搬送波位相測位側結合値として第1のGPS衛星からの搬送波に基づく第1の搬送波位相測位側結合値と第2のGPS衛星からの搬送波に基づく第2の搬送波位相測位側結合値とを計算し、
前記測位部は、前記第1の擬似距離結合値と前記第2の擬似距離結合値との一重差と前記第1の擬似距離測位側結合値と前記第2の擬似距離測位側結合値との一重差とに基づく二重差の値を擬似距離結合値の二重差として計算し、前記第1の搬送波位相結合値と前記第2の搬送波位相結合値との一重差と前記第1の搬送波位相測位側結合値と前記第2の搬送波位相測位側結合値との一重差とに基づく二重差の値を搬送波位相結合値の二重差として計算し、前記擬似距離結合値の二重差と前記搬送波位相結合値の二重差とに基づいて自己位置を計算する
ことを特徴とする請求項11記載の測位装置。
【請求項13】
前記補正データ送信装置は、前記擬似距離結合値に含まれる誤差を補正する補正量を基準点側補正量として含めて前記補正データを前記測位装置に送信し、
前記測位部は、前記補正データに含まれる前記基準点側補正量に基づいて自己位置を計算する
ことを特徴とする請求項11〜請求項12いずれかに記載の測位装置。
【請求項14】
前記測位装置は、
前記補正データに含まれる前記基準点側補正量に基づいて前記擬似距離測位側結合値に含まれる誤差を補正する補正量を測位側補正量としてCPUを用いて計算する測位側補正量計算部を備え、
前記測位部は、前記測位側補正量計算部により計算された測位側補正量に基づいて自己位置を計算する
ことを特徴とする請求項13記載の測位装置。
【請求項15】
前記補正データ送信装置は、複数の電子基準点それぞれの前記基準点側補正量を含めて前記補正データを送信し、
前記測位側補正量計算部は、前記測位装置の概略位置と前記複数の電子基準点それぞれの位置との位置関係に基づいて、複数の電子基準点それぞれの前記基準点側補正量を用いた線形補間により前記測位側補正量を計算する
ことを特徴とする請求項14記載の測位装置。
【請求項16】
前記測位部は、以下の式Dに基づいて前記GPS衛星との幾何学的距離の二重差∇ΔrMsを算出し、算出した幾何学的距離の二重差∇ΔrMsに基づいて自己位置を計算する
ことを特徴とする請求項11〜請求項15いずれかに記載の測位装置。
【数3】
【請求項17】
自己位置を測位する測位装置の測位方法であり、
補正データ受信部が、請求項1〜請求項8いずれかに記載の補正データ送信装置により送信された前記補正データを通信装置を用いて受信する補正データ受信処理を実行し、
GPS受信部が、前記GPS衛星から前記第1の搬送波と前記第2の搬送波とを通信装置を用いて受信し、受信した前記第1の搬送波から前記GPS衛星と自己位置との擬似距離を示す第1の測位側擬似距離と前記第1の搬送波の位相を示す第1の測位側搬送波位相とを取得すると共に、受信した前記第2の搬送波から前記GPS衛星と自己位置との擬似距離を示す第2の測位側擬似距離と前記第2の搬送波の位相を示す第2の測位側搬送波位相とを取得するGPS受信処理を実行し、
擬似距離測位側結合値計算部が、前記GPS受信部により取得された前記第1の測位側擬似距離と前記GPS受信部により取得された前記第2の測位側擬似距離とを線形結合した値をCPUを用いて擬似距離測位側結合値として計算する擬似距離測位側結合値計算処理を実行し、
搬送波位相測位側結合値計算部が、前記GPS受信部により取得された前記第1の測位側搬送波位相と前記GPS受信部により取得された前記第2の測位側搬送波位相とを線形結合した値をCPUを用いて搬送波位相測位側結合値として計算する搬送波位相測位側結合値計算処理を実行し、
測位部が、前記補正データ受信部により受信された補正データに含まれる擬似距離結合値と、前記補正データ受信部により受信された補正データに含まれる搬送波位相結合値と、前記擬似距離測位側結合値計算部により計算された擬似距離測位側結合値と、前記搬送波位相測位側結合値計算部により計算された搬送波位相測位側結合値とに基づいて、自己位置をCPUを用いて計算する測位処理を実行する
ことを特徴とする測位装置の測位方法。
【請求項18】
請求項17記載の測位方法をコンピュータに実行させる測位プログラム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2010−112725(P2010−112725A)
【公開日】平成22年5月20日(2010.5.20)
【国際特許分類】
【出願番号】特願2008−283017(P2008−283017)
【出願日】平成20年11月4日(2008.11.4)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成22年5月20日(2010.5.20)
【国際特許分類】
【出願日】平成20年11月4日(2008.11.4)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]