
補正位置特定装置、補正位置特定方法および補正位置特定プログラム
【課題】地図情報に登録された道路外へ車両が進入したことを早期に特定する。
【解決手段】車両に備えられた検出器の出力信号に基づく前記車両の位置を示す検出位置の時系列の軌跡を検出位置軌跡として取得し、道路の位置および形状を示す地図情報を取得し、前記車両の位置から所定の検索範囲内に存在し、かつ、前記検出位置軌跡の形状と類似する形状を有する前記道路である走行道路を前記地図情報にて検索し、前記走行道路が検索できた場合、前記検出位置軌跡に基づく前記走行道路上の位置を前記車両の前記補正位置と特定し、前記検出位置軌跡の信頼度が所定の基準信頼度よりも高い場合に、前記信頼度が前記基準信頼度以下である場合よりも、前記検索範囲を小さくする。
【解決手段】車両に備えられた検出器の出力信号に基づく前記車両の位置を示す検出位置の時系列の軌跡を検出位置軌跡として取得し、道路の位置および形状を示す地図情報を取得し、前記車両の位置から所定の検索範囲内に存在し、かつ、前記検出位置軌跡の形状と類似する形状を有する前記道路である走行道路を前記地図情報にて検索し、前記走行道路が検索できた場合、前記検出位置軌跡に基づく前記走行道路上の位置を前記車両の前記補正位置と特定し、前記検出位置軌跡の信頼度が所定の基準信頼度よりも高い場合に、前記信頼度が前記基準信頼度以下である場合よりも、前記検索範囲を小さくする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、マップマッチング処理により車両の補正位置を特定する技術に関する。
【背景技術】
【0002】
車両が走行する道路に沿いに交差点と駐車場とが存在する場合に、車両が交差点から他の道路へ進入したのか、駐車場へ進入したのかを判別するナビゲーション装置が提案されている(特許文献1、参照)。特許文献1のナビゲーション装置は、車両が一定速度以下に減速して、さらに旋回した場合に、車両の位置から一定範囲内に駐車場が存在するか否かを判定する。そして、車両の位置から一定範囲内に駐車場が存在する場合には、車両が交差点から他の道路に進入したのではなく駐車場に進入したとしてし、当該他の道路へのマップマッチングを中止する。これにより、駐車場へ進入したことを早期に特定し、他の道路への誤ったマップマッチングを早期に停止させることができる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平10−197268号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1の技術は、道路沿いに駐車場が存在していることが地図情報等により特定できる場合には有効であるが、道路沿いに駐車場が存在していることが特定できない場合には、駐車場等へ車両が進入したことを早期に特定できないという問題があった。
本発明は、上記課題にかんがみてなされたもので、地図情報に登録された道路外に車両が進入したことを早期に特定する技術の提供を目的とする。
【課題を解決するための手段】
【0005】
上記の目的を達成するため、本発明において、検出位置軌跡取得手段は、車両に備えられた検出器の出力信号に基づく車両の位置を示す検出位置の時系列の軌跡を検出位置軌跡として取得する。走行道路検索手段は、車両の位置から所定の検索範囲内に存在し、かつ、検出位置軌跡の形状と類似する形状を有する道路である走行道路を地図情報にて検索する。なお、地図情報は道路の位置および形状を示す情報であり、地図情報取得手段によって取得される。補正位置特定手段は、検出位置を走行道路上の位置へと補正することにより、車両の位置を示す補正位置を特定する。そして、検索範囲設定手段は、検出位置軌跡の信頼度が所定の基準信頼度よりも高い場合に、信頼度が基準信頼度以下である場合よりも、検索範囲を小さくする。
【0006】
検出位置軌跡の信頼度が基準信頼度よりも高い場合に、検索範囲設定手段が検索範囲を小さくすることにより、走行道路検索手段が地図情報にて検索する走行道路の候補の数を減少させることができる。地図情報にて検索する走行道路の候補の数を減少させておくことにより、当該候補のすべての道路の形状が検出位置軌跡の形状と類似しなくなる可能性を高めることができる。従って、刻々と変化する検出位置軌跡の形状に対して類似する形状を有する候補の道路が存在しなくなるまでの所要期間を短縮できる。すなわち、走行道路が検索できなくなり、地図情報に登録された道路のいずれにも車両が進入せず、地図情報に登録された道路外へ車両が進入したことを早期に特定できる。ところで、検索範囲は車両の位置からの範囲であり、検出位置からの範囲であってもよいし、補正位置からの範囲であってもよい。ここで、検出位置軌跡の信頼度が低い場合には検出位置と補正位置の特定精度も低くなるため、車両の位置からの検索範囲を小さくすることによって車両が現実に走行している道路が走行道路として検索されなくなる弊害も生じ得る。これに対して、検索範囲設定手段は、検出位置軌跡の信頼度が所定の基準信頼度以下の場合には検索範囲を小さくしないため、検出位置軌跡の信頼度が低い場合に車両が現実に走行している道路が走行道路として検索されなくなることが防止できる。
【0007】
検出位置軌跡取得手段は車両に備えられた検出器の出力信号に基づく検出位置の時系列の軌跡である検出位置軌跡を取得すればよく、検出器としてのGPS受信器と車速センサとの出力信号に基づく検出位置の軌跡である検出位置軌跡を取得してもよいし、検出器としてのGPS受信器の出力信号のみに基づく検出位置の軌跡である検出位置軌跡を取得してもよい。また、検出器としてのGPS受信器と車速センサとジャイロセンサとの出力信号を総合して得られた検出位置の軌跡である検出位置軌跡を取得してもよい。また、補正位置軌跡は地図情報が示す走行道路の形状が反映された形状を有する軌跡であるのに対して、地図情報に基づく補正が行われていない検出位置の軌跡である。
【0008】
走行道路検索手段は、車両の位置から所定の検索範囲内に存在する道路を走行道路の候補とし、これらの候補のうち検出位置軌跡の形状と類似する形状を有する道路を走行道路として検索する。例えば、走行道路検索手段は、走行道路の候補のうち検出位置軌跡との類似度が最も高い道路を走行道路として検索してもよいし、さらに走行道路の候補のうち検出位置軌跡との類似度が最も高く、かつ、所定の閾値よりも高い道路を走行道路として検索してもよい。なお、検索範囲は補正位置を基準として定められる範囲であり、補正位置を重心等とした所定図形に対応する範囲であってもよいし、過去に検索された走行道路に沿った範囲であってもよい。さらに、検索範囲を補正位置に到達するまでに走行する必要がある道路区間に対応するリンクの数に基づいて定めてもよい。
【0009】
補正位置特定手段は、検出位置を走行道路上の位置へと補正することにより、車両の位置を示す補正位置を特定すればよく、走行道路上の位置のうち検出位置から最も近い位置を補正位置として特定してもよい。また、補正位置特定手段は、過去の所定時刻から現在に至るまでの車両の変位を検出位置軌跡に基づいて特定し、過去の所定時刻における補正位置に前記変位を加えた位置を現在の補正位置と特定してもよい。
【0010】
検索範囲設定手段は、検出位置軌跡の信頼度が基準信頼度よりも高い場合に、信頼度が基準信頼度以下である場合よりも検索範囲を小さくすればよく、少なくとも信頼度が基準信頼度よりも高い場合と、信頼度が基準信頼度以下の場合とで検索範囲の大きさを切り替えればよい。さらに、検索範囲設定手段は、検出位置軌跡の信頼度に応じて検索範囲を段階的に小さくしてもよいし、連続的に小さくしてもよい。
【0011】
検索範囲設定手段は、種々の手法により検出位置軌跡の信頼度を特定できる。例えば、検出位置軌跡を得るための検出器の動作状況に基づいて検出位置軌跡の信頼度を特定してもよいし、検出位置軌跡の形状が車両の走行軌跡の形状として現実性の高いものであるか否かに基づいて信頼度を特定してもよい。さらに、補正位置の時系列の軌跡である補正位置軌跡と、検出位置軌跡との比較に基づいて検出位置軌跡の信頼度を特定してもよい。すなわち、補正位置軌跡と検出位置軌跡との類似度が基準類似度よりも高いか否かを判定し、類似度が基準類似度よりも高い場合に、検出位置軌跡の信頼度が基準信頼度よりも高いとしてもよい。補正位置軌跡は走行道路上の補正位置の軌跡であるため、車両の走行軌跡として現実性の高い軌跡であり、当該補正位置軌跡に形状が類似すれば検出位置軌跡の信頼度は高いということができる。
【0012】
さらに、検索範囲設定手段は、補正位置軌跡と検出位置軌跡との類似度を、補正位置軌跡と検出位置軌跡との距離に基づいて特定してもよい。すなわち、検索範囲設定手段は、補正位置軌跡と検出位置軌跡との距離が所定の基準距離よりも短い場合に、補正位置軌跡と検出位置軌跡との類似度が基準類似度よりも高いと判定してもよい。補正位置軌跡と検出位置軌跡との距離が短いほど、検出位置軌跡の形状は現実の道路の形状に近く、検出位置軌跡の信頼度が高いということができる。例えば、補正位置軌跡と検出位置軌跡との距離は、補正位置軌跡と検出位置軌跡との距離の最大値や最小値や平均値等に基づいて把握することができる。さらに、検索範囲設定手段は、補正位置軌跡の形状と検出位置軌跡の形状とから特徴点を抽出し、当該特徴点の比較により補正位置軌跡と検出位置軌跡との類似度を特定してもよい。さらに、検索範囲設定手段は、補正位置軌跡の形状に含まれる直線部分と、検出位置軌跡に含まれる直線部分との方位差に基づいて類似度を特定してもよい。
【0013】
さらに、検索範囲設定手段は、検出位置軌跡のうち現在まで連続する所定の注目期間に対応する部分である注目検出位置軌跡と、補正位置軌跡のうち注目期間に対応する部分である注目補正位置軌跡との類似度が基準類似度よりも高いか否かを判定してもよい。類似度を判定する部分を注目期間に対応する部分に限ることにより、信頼度を判定するための処理負荷を軽減できる。また、注目期間は現在を含む期間であるため、検出位置軌跡の最新の信頼度を特定できる。なお、注目期間は、期間の長さによって定められてもよいし、注目期間に車両が走行する距離によって定められてもよい。
【0014】
また、検索範囲設定手段は、注目検出位置軌跡の形状と注目補正位置軌跡の形状との少なくとも一方においてN個以上(自然数)の屈曲点が含まれない場合に、注目検出位置軌跡と注目補正位置軌跡との類似度の判定を行わないようにしてもよい。注目検出位置軌跡の形状と注目補正位置軌跡の形状に屈曲点が少ないほど、注目検出位置軌跡の形状と注目補正位置軌跡の形状の特徴が乏しくなるため、注目検出位置軌跡と注目補正位置軌跡との類似度を高精度に特定できなくなる。このような場合には、検出位置軌跡と補正位置軌跡との類似度の判定を行わないことにより、処理負荷を軽減させるとともに、精度の低い形状の類似度に基づいて検索範囲が設定されることが防止できる。なお、屈曲点は軌跡の形状を構成する2個の直線がなす角が所定角度以上である点であってもよいし、軌跡の形状の曲率半径が所定値以下となる点であってもよい。
【0015】
さらに、本発明のように、走行道路を検索する検索範囲を調整する手法は、プログラムや方法としても適用可能である。また、以上のような装置、プログラム、方法は、単独の装置として実現される場合もあれば、車両に備えられる各部と共有の部品を利用して実現される場合もあり、各種の態様を含むものである。例えば、以上のような装置を備えたナビゲーション装置や方法、プログラムを提供することが可能である。また、一部がソフトウェアであり一部がハードウェアであったりするなど、適宜、変更可能である。さらに、装置を制御するプログラムの記録媒体としても発明は成立する。むろん、そのソフトウェアの記録媒体は、磁気記録媒体であってもよいし光磁気記録媒体であってもよいし、今後開発されるいかなる記録媒体においても全く同様に考えることができる。
【図面の簡単な説明】
【0016】
【図1】補正位置特定装置のブロック図である。
【図2】(2A),(2B)はマップマッチング処理を示す模式図である。
【図3】(3A)は検索候補設定処理のフローチャート、(3B)は実行可否判定処理のフローチャートである。
【図4】(4A)は形状類否判定処理のフローチャート、(4B)は比較区間抽出処理のフローチャート、(4C)は比較区間抽出処理の模式図である。
【図5】形状比較処理のフローチャートである。
【図6】(6A),(6B)は、注目補正位置軌跡と注目検出位置軌跡とを示す図である。
【図7】(7A)は検索範囲設定処理のフローチャート,(7B)は検索候補抽出処理のフローチャートである。
【発明を実施するための形態】
【0017】
ここでは、下記の順序に従って本発明の実施の形態について説明する。
(1)補正位置特定装置の構成:
(2)補正位置特定処理:
(2−1)マップマッチング処理:
(2−2)検索候補設定処理:
(2−2−1)実行可否判定処理:
(2−2−2)形状類否判定処理:
(2−2−2−1)比較区間抽出処理:
(2−2−2−2)形状比較処理:
(2−2−3)検索範囲設定処理:
(2−2−4)検索候補抽出処理:
(3)他の実施形態:
【0018】
(1)補正位置特定装置の構成:
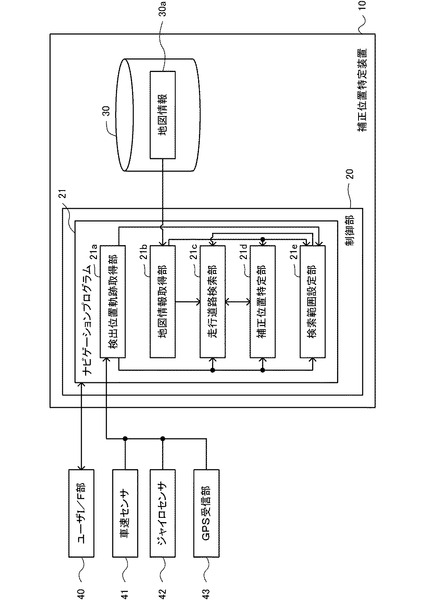
図1は、本発明にかかる補正位置特定装置10の構成を示すブロック図である。補正位置特定装置10は、制御部20と記録媒体30を備える。制御部20は、CPUとRAMとROM等を備え、記録媒体30やROMに記憶された各種プログラムを実行する。記録媒体30は、地図情報30aを記録する。地図情報30aは、車両が走行する道路上に設定されたノードの位置等を示すノードデータと、ノード間の道路の形状を特定するための形状補間点データと、ノード同士の連結を示すリンクデータと、道路やその周辺に存在する地物の位置および種類等を示す地物データ等を含んでいる。
【0019】
補正位置特定装置10は車両に搭載される。補正位置特定装置10が搭載された車両は、ユーザI/F部40と車速センサ41とジャイロセンサ42とGPS受信部43とを備えている。なお、車速センサ41とジャイロセンサ42とGPS受信部43とは検出器を構成する。本実施形態において、ユーザI/F部40は、ユーザからの操作を受け付ける受付手段と地図を表示させる表示手段とを兼ねるタッチパネルを有する。車速センサ41は、車両が備える車輪の回転速度に対応した出力信号を補正位置特定装置10の制御部20に出力する。ジャイロセンサ42は、車両に作用する角速度に対応した出力信号を補正位置特定装置10の制御部20に出力する。GPS受信部43は、GPS衛星からの電波を受信し、車両の位置を特定するための出力信号を補正位置特定装置10の制御部20に出力する。
【0020】
制御部20は、上述した各種プログラムの一つとしてナビゲーションプログラム21を実行する。ナビゲーションプログラム21は、検出位置軌跡取得部21aと地図情報取得部21bと走行道路検索部21cと補正位置特定部21dと検索範囲設定部21eとを含む。
【0021】
検出位置軌跡取得部21aは、車両に備えられた検出器の出力信号に基づく車両の位置を示す検出位置の時系列の軌跡を検出位置軌跡として取得する機能を制御部20に実行させるモジュールである。すなわち、検出位置軌跡取得部21aの機能により制御部20は、車速センサ41とジャイロセンサ42とGPS受信部43の出力信号を取得する。そして、検出位置軌跡取得部21aの機能により制御部20は、車速センサ41の出力信号およびジャイロセンサ42の出力信号に基づいて、車両が所定の単位距離(1.2m)走行するごとに現在の車両の位置を検出位置として特定する。検出位置軌跡取得部21aの機能により制御部20は、ジャイロセンサ42の出力信号に基づいて、車両が単位距離走行する期間において変化した車両の方位の変化量を相対方位として取得する。なお、車両が単位距離走行したか否かは車速センサ41の出力信号に基づく車速の時間積分値に基づいて判断できる。検出位置軌跡取得部21aの機能により制御部20は、車両が単位距離走行するごとの相対方位を現在まで累積することにより、車両の現在の方位である検出方位を取得する。検出位置軌跡取得部21aの機能により制御部20は、前回の周期にて特定した検出位置から、今回の周期にて特定した検出方位へ単位距離だけ移動した位置を今回の周期における検出位置として取得する。
【0022】
なお、検出位置軌跡取得部21aの機能により制御部20は、例えば検出器としてのGPS受信部43の出力信号に基づいて初期の検出位置と初期の検出方位を特定する。初期の検出方位に対して相対方位を順次累積していくことにより、絶対方位としての検出方位を更新していくことができる。また、初期の検出位置を基準として検出方位へ単位距離だけ移動する処理を繰り返すことにより、絶対位置としての検出位置を更新していくことができる。検出位置軌跡取得部21aの機能により制御部20は、時系列の検出位置の軌跡を検出位置軌跡として取得する。なお、検出位置軌跡取得部21aの機能により制御部20は、GPS受信部43の出力信号に基づく車両の位置の軌跡と整合するように検出位置軌跡を適宜補正してもよい。検出位置軌跡取得部21aの機能により制御部20は、以上のようにして取得した検出位置の時系列の軌跡を検出位置軌跡として取得する。
【0023】
地図情報取得部21bは、道路の位置および形状を示す地図情報30aを取得する機能を制御部20に実行させるモジュールである。すなわち、地図情報取得部21bの機能により制御部20は、記録媒体30から地図情報30aを読み出す。走行道路検索部21cは、車両の位置から所定の検索範囲内に存在し、かつ、検出位置軌跡の形状と類似する形状を有する道路である走行道路を地図情報30aにて検索する機能を制御部20に実行させるモジュールである。すなわち、走行道路検索部21cの機能により制御部20は、車両の位置を示す補正位置から検索範囲内に存在する道路を走行道路の候補を地図情報30aから取得し、さらに走行道路の候補のうち検出位置軌跡の形状との類似度が最も高い形状を有する道路を走行道路として検索する。
【0024】
補正位置特定部21dは、走行道路が検索できた場合、検出位置を走行道路上の位置へ補正することにより、車両の位置を示す補正位置を特定する機能を制御部20に実行させるモジュールである。すなわち、補正位置特定部21dの機能により制御部20は、走行道路が検索できた場合には、検出位置軌跡に基づいて、走行道路上の位置から車両の補正位置を特定する。例えば、補正位置特定部21dの制御部20は、検出位置軌跡に基づく現在の検出位置から走行道路上の最も近い位置を補正位置として特定する。本実施形態では、車両が単位距離(1.2m)だけ走行するごとに検出位置が特定されるため、互いに連続する周期にて特定された補正位置同士の距離も単位距離とほぼ一致する。一方、走行道路が検索できなかった場合、補正位置特定部21dの機能により制御部20は、地図情報30aに登録された道路外の位置を車両が走行すると特定(オフロード判定)する。
【0025】
以上のように上述した各モジュール21a〜21dの機能により制御部20は、地図情報30aと検出位置軌跡とに基づいて車両が走行している走行道路を検索するとともに、走行道路が検索できた場合には検出位置軌跡に基づいて当該走行道路上において補正位置を特定するマップマッチング処理を実行する。ただし、例外として走行道路が検索できなかった場合には、制御部20は、地図情報30aに登録された道路上ではない位置を車両が走行していると特定する。なお、走行道路が検索できるための条件は、車両の位置から所定の検索範囲内に存在し、かつ、検出位置軌跡の形状と類似する形状を有する道路が1つでも地図情報30aに登録されていることである。従って、検索範囲が小さいほど走行道路の候補の数を減少させることができ、走行道路が検索できないと判明するまでの所要期間も短縮でき、地図情報30aに登録されている道路外の位置を車両が走行していることを早期に特定できる。検索範囲設定部21eは、以上の性質を有する検索範囲を設定するためのモジュール、すなわち地図情報30aに登録されている道路外の位置を車両が走行していると特定されるまでの所要期間を調整するためのモジュールとして位置づけられる。
【0026】
検索範囲設定部21eは、検出位置軌跡の信頼度が所定の基準信頼度よりも高い場合に、信頼度が基準信頼度以下である場合よりも、検索範囲を小さくする機能を制御部20に実行させるモジュールである。すなわち、検索範囲設定部21eの機能により制御部20は、検出位置軌跡の信頼度が所定の基準信頼度よりも高いか否かを判定し、検出位置軌跡の信頼度が所定の基準信頼度よりも高い場合には、検索範囲を小さくする。
【0027】
検索範囲設定部21eの機能により制御部20は、検出位置軌跡の信頼度が所定の基準信頼度よりも高いか否かを、以下の具体的手法により判定する。すなわち、検索範囲設定部21eの機能により制御部20は、補正位置の時系列の軌跡である補正位置軌跡と、検出位置軌跡との類似度が所定の基準類似度よりも高い場合に、検出位置軌跡の信頼度が基準信頼度よりも高いとする。より具体的に、検索範囲設定部21eの機能により制御部20は、補正位置軌跡のうち現在まで連続する所定の注目期間に対応する部分である注目補正位置軌跡と、検出位置軌跡のうち注目期間に対応する部分である注目検出位置軌跡との距離が所定の基準距離より短い場合に、補正位置軌跡と検出位置軌跡との類似度が基準類似度より高いとする。本実施形態において、現在の検出位置から所定距離だけ遡った検出位置までの軌跡を注目検出位置軌跡とする。この場合、現在の検出位置から所定距離だけ遡った検出位置が検出された時刻を始期とし、現在を終期とする期間が注目期間となる。また、検索範囲設定部21eの機能により制御部20は、注目検出位置軌跡にN(N=1)個以上の屈曲点が含まれない場合に、注目補正位置軌跡部分と注目検出位置軌跡との類似度が基準類似度よりも高いか否かの判定をすることなく検索範囲を設定する。すなわち、現在まで連続して車両が所定距離以上直進していることが注目検出位置軌跡によって示される場合には、注目補正位置軌跡部分と注目検出位置軌跡との類似度を解析する処理を省略する。
【0028】
以上説明した本実施形態の構成において、検出位置軌跡の信頼度が基準信頼度よりも高い場合に、制御部20が検索範囲を小さくすることにより、制御部20が地図情報30aにて検索する走行道路の候補の数を減少させることができる。地図情報30aにて検索する走行道路の候補の数を減少させておくことにより、当該候補のすべての道路の形状が検出位置軌跡の形状と類似しなくなる可能性を高めることができる。従って、刻々と変化する検出位置軌跡の形状に対して類似する形状を有する候補の道路が存在しなくなるまでの所要期間を短縮できる。すなわち、走行道路が検索できなり、地図情報30aに登録された道路のいずれにも車両が進入せず、地図情報30aに登録された道路外へ車両が進入したことを早期に特定できる。ところで、検出位置軌跡の信頼度が低い場合には補正位置の特定精度も低くなるため、補正位置からの検索範囲を小さくすることによって車両が現実に走行している道路が走行道路として検索されなくなる弊害も生じ得る。これに対して、制御部20は、検出位置軌跡の信頼度が所定の基準信頼度以下の場合に検索範囲を小さくしないため、検出位置軌跡の信頼度が低い場合に車両が現実に走行している道路が走行道路として検索されなくなることが防止できる。
【0029】
本実施形態の制御部20は、検出位置軌跡が車両の走行軌跡として現実性の高いものであるか否かに基づいて信頼度を特定している。すなわち、制御部20は、補正位置軌跡と検出位置軌跡との類似度が基準類似度よりも高いか否かを判定し、類似度が基準類似度よりも高い場合に、検出位置軌跡の信頼度が基準信頼度よりも高いとしている。補正位置軌跡は走行道路上の補正位置の軌跡であるため、車両の走行軌跡として現実性の高い軌跡であり、当該補正位置軌跡に形状が類似すれば検出位置軌跡の信頼度は高いからである。
【0030】
さらに、制御部20は、補正位置軌跡と検出位置軌跡との距離が所定の基準距離よりも短い場合に、類似度が基準類似度よりも高いと判定する。補正位置軌跡と検出位置軌跡との距離が短いほど、検出位置軌跡の形状は現実の道路の形状に近く、検出位置軌跡の信頼度が高いということができる。より具体的に、制御部20は、検出位置軌跡のうち現在まで連続する所定の注目期間に対応する部分である注目検出位置軌跡と、補正位置軌跡のうち注目期間に対応する部分である注目補正位置軌跡との類似度が基準類似度よりも高いか否かを判定している。類似度を判定する部分を注目期間に対応する部分に限ることにより、信頼度を判定するための処理負荷を軽減できる。また、注目期間は現在を含む期間であるため、検出位置軌跡の最新の信頼度を特定できる。
【0031】
また、制御部20は、注目検出位置軌跡の形状または注目補正位置軌跡の形状にN(N=1)個以上の屈曲点が含まれない場合に、注目検出位置軌跡と注目補正位置軌跡との類似度の判定を行わないようにしている。注目検出位置軌跡の形状または注目補正位置軌跡の形状に屈曲点が少ないほど、注目検出位置軌跡の形状または注目補正位置軌跡の形状の特徴が乏しくなるため、注目検出位置軌跡と注目補正位置軌跡との類似度を高精度に特定できなくなる。このような場合には、検出位置軌跡と補正位置軌跡との類似度の判定を行わないことにより、処理負荷を軽減させるとともに、精度の低い形状の類似度に基づいて検索範囲が設定されることが防止できる。
【0032】
(2)補正位置特定処理:
次に、ナビゲーションプログラム21の機能により制御部20が実行する補正位置特定処理を説明する。補正位置特定処理は、それぞれ所定の周期ごとに実行されるマップマッチング処理と検索候補設定処理とを含む。ここでは、まずマップマッチング処理について説明する。
【0033】
(2−1)マップマッチング処理:
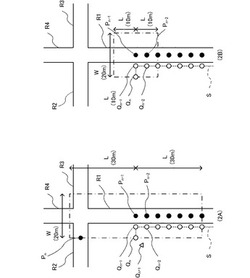
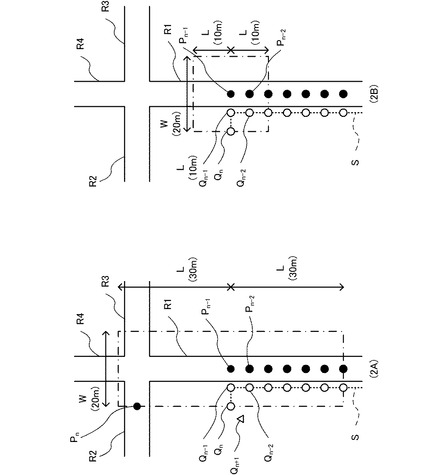
図2A,2Bはマップマッチング処理を示す模式図である。なお、図2A,2Bは、互いに同一の道路R1〜R4を示す。上述のようにマップマッチング処理は車両が単位距離走行する周期ごとに実行される処理である。現在の周期の番号をn(自然数)と表記する。図2A,2Bにように、検出位置軌跡取得部21aの機能により制御部20は、検出位置軌跡S(破線)を取得する。すなわち、検出位置軌跡取得部21aの機能により制御部20は、車両が単位距離走行するごと車速センサ41およびジャイロセンサ42の出力信号に基づいて検出位置Qnを特定し、現在の検出位置Qnが先頭となる時系列の検出位置Qn,Q n-1,Q n-2・・・(白丸)の軌跡を検出位置軌跡Sとして取得する。
【0034】
次に、走行道路検索部21cの機能により制御部20は、検索範囲A(一点鎖線枠)に少なくとも一部が属する道路を走行道路の候補として取得し、当該候補のうち検出位置軌跡Sの形状との類似度が最も高い形状を有する道路を走行道路として検索する。検索範囲Aは、後述する検索候補設定処理によって所定の周期ごとに設定され、具体的に検索候補設定処理において検索範囲Aの大きさを規定する範囲長Lが設定される。検索範囲Aは、直前の周期(n−1)にて特定された補正位置P n-1(黒丸)を基準として設定される。図2A,2Bでは、直前の周期において、検出位置Q n-1に最も近い走行道路(道路R1)上の位置を補正位置P n-1として特定されていることとする。検索範囲Aは、直前の周期にて特定された走行道路(道路R1)のうち、車両が直前の周期にて特定された補正位置P n-1から範囲長Lだけ当該走行道路(道路R1)上を後退した場合に到達する位置から、当該補正位置P n-1から車両が範囲長Lだけ当該走行道路(道路R1)上を前進した場合に到達する位置までの区間に沿った所定幅W(20m)の範囲である。なお、図2Aにおいて範囲長Lは30mと設定され,図2Bにおいて範囲長Lは10mとされている。
【0035】
走行道路検索部21cの機能により制御部20は、検索範囲Aに少なくとも一部が属する走行道路の候補の道路の形状を取得すると、当該候補の道路のうち検出位置軌跡Sの形状との類似度が最も高い形状を有する道路を走行道路として検索する。例えば、検出位置軌跡Sの形状と道路の形状の類似度は、方向や位置の相違が総合的に反映されたコストに基づいて検索されてもよい。
【0036】
図2Aの場合、もとの走行道路である道路R1以外に、車両の走行方向前方に存在する交差点にて当該道路R1に接続する道路R2〜R4の一部が検索範囲A内に存在しており、道路R1〜R4が走行道路の候補とされ得る。ただし、本実施形態においては、後述する検索候補設定処理(検索候補抽出処理)によって検出位置軌跡Sが示す車両の現在の方位に基づく候補の道路の絞り込みが行われており、検出位置軌跡Sが示す車両の現在の方位と所定角度以上異なる方向の道路は走行道路の候補から除外されている。図2Aの場合、検出位置軌跡Sが示す車両の現在の方位と垂直な道路R1は候補から除外され、車両の現在の方位とほぼ平行な道路R2,R3のみが走行道路の候補として絞り込まれている。そして、走行道路検索部21cの機能により制御部20は、絞り込まれた候補の道路R2,R3のうち検出位置軌跡Sの形状との類似度が最も高い、すなわち検出位置軌跡Sの形状と同様に左側へと向かう形状を示す道路R2を走行道路として検索する。道路R2を走行道路として検索すると、補正位置特定部21dの機能により制御部20は、検出位置軌跡Sに基づいて走行道路(道路R2)上において検出位置Qnに最も近い位置を車両の補正位置Pnとして特定する。
【0037】
一方、図2Bの場合、図2Aの場合よりも検索範囲Aが小さくなっており、道路R2〜R4が検索範囲A外となっている。すなわち、もとの走行道路である道路R1以外の道路が検索範囲A内に存在しておらず、さらに道路R1も検出位置軌跡Sの方位に基づく候補の道路の絞り込みにより候補から除外されるため、走行道路の候補は1つも存在せず、走行道路検索部21cの機能により制御部20は、走行道路が検索できなったとする。この場合、走行道路検索部21cの機能により制御部20は、車両が地図情報30aに登録された道路外を走行していると特定する。以上説明したように、検索範囲Aの大きさを規定する範囲長Lを短く設定することにより、走行道路の候補の数を減少させることができるため、車両が地図情報30aに登録された道路外を走行していると特定されるまでの所要期間を短縮できる。すなわち、図2Aにおいて、車両がさらに道路外を走行して検出位置Q n+1(白三角)まで検出位置軌跡Sが延長され、当該延長した検出位置軌跡Sが示す現在の車両の方位と、道路R2の方向とが所定角度以上相違するまでは、道路R2が走行道路として検索され、道路R2上の位置が補正位置と特定され続けることとなる。これに対して、図2Bのように検索範囲Aを小さく設定しておけば、検出位置軌跡Sが示す現在の車両の方位と、道路R2の方向とが所定角度以上相違するのを待つまでもなく、早期に地図情報30aに登録された道路外の位置を車両が走行していると特定できる。従って、例えば地図情報30aの作成後に建造されたことにより地図情報30aにて地物データとして登録されていない駐車場や、地図情報30aにて進入するためのノードが登録されていない道路に進入するために道路R2とは異なる位置にて左折したにも拘わらず、道路R2上の位置が補正位置Pnとされることが防止でき、ユーザI/F部40によって地図上に表示された補正位置Pnを視認したユーザに違和感を与えることが防止できる。
【0038】
(2−2)検索候補設定処理:
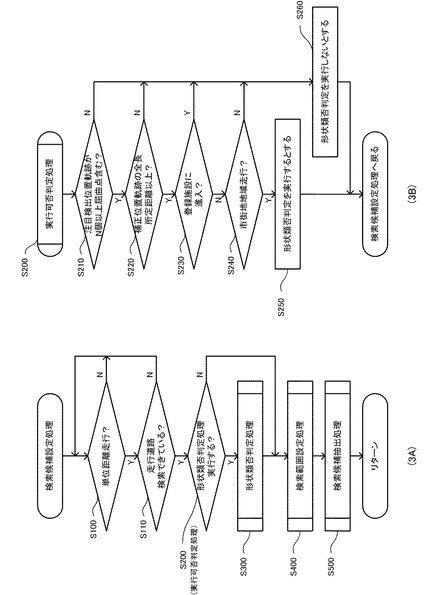
図3Aは、検索候補設定処理の流れを示すフローチャートである。ステップS100において検索範囲設定部21eの機能により制御部20は、車両が所定の単位距離を走行したか否かを判定する。なお、検索候補設定処理は車両が単位距離を走行する周期ごとに繰り返して実行するループ処理である。検索候補設定処理を実行する周期に対応する単位距離は、マップマッチング処理を実行する周期に対応する単位距離(1.2m)と同じであってもよいが、マップマッチング処理の単位距離よりも長くてもよい。車両が単位距離走行すると、ステップS110において制御部20は、並行して実行されているマップマッチング処理において走行道路検索部21cの機能により走行道路が検索できているか否かを判定する。走行道路が検索できていない場合には、制御部20は、次に単位距離走行するまで待機する。走行道路が検索できている場合、制御部20は、ステップS200の実行可否判定処理においてステップS300の形状類否判定処理を実行するか否かを判定する。
【0039】
(2−2−1)実行可否判定処理:
図3Bは、実行可否判定処理のフローチャートである。ステップS210において制御部20は、検出位置軌跡Sのうち現在の検出位置Qnから所定距離(186m)だけ遡った検出位置Q n-155までの軌跡を注目検出位置軌跡とし、この注目検出位置軌跡にN(N=1)個以上の屈曲点が含まれるか否かを判定する。本実施形態では、単位距離(1.2m)ごとに検出位置Qが特定されるため、現在の検出位置Qnを含め現在に近い時刻に特定された156個の検出位置Qn〜Q n-155によって注目検出位置軌跡が構成される。本実施形態では、処理負荷の軽減のため、制御部20は、156個の検出位置を5個周期で均等に抽出することにより、6mごと32個の検出位置Qn-5t(tは0〜31の整数)によって構成される注目検出位置軌跡を取得する。制御部20は、互いに連続する周期にて特定された検出位置Q同士を連結した折れ線を形成し、検出位置Qにて互いに接続する折れ線同士のなす角に基づいて車両が所定角度(60度)以上旋回した屈曲点が注目検出位置軌跡にN個以上含まれるか否かを判定する。ステップS210にて、注目検出位置軌跡にN個以上の屈曲点が含まれないと判定した場合、ステップS260において制御部20は、形状類否判定処理を実行しないこととする。すなわち、注目検出位置軌跡がほぼ直線であり、注目検出位置軌跡と注目補正位置軌跡との類似度を判定するのに足りる形状的特徴が注目検出位置軌跡に存在しないとして、形状類否判定処理を実行しないこととする。
【0040】
一方、ステップS210にて注目検出位置軌跡にN個以上の屈曲点が含まれると判定した場合、ステップS220において制御部20は、補正位置軌跡の全長が注目検出位置軌跡の長さである所定距離(186m)以上であるか否かを判定する。上述のように、補正位置Pもほぼ単位距離(1.2m)周期で特定されるため、現在までに連続して156個の補正位置Pn〜P n-155(図2A,2Bに示す黒丸)がマップマッチング処理において特定されているか否かを判定すればよい。ステップS220にて、補正位置軌跡の全長が所定距離以上でないと判定した場合、制御部20は、注目検出位置軌跡と比較し得る程度の長さの補正位置軌跡が取得できないとして、ステップS260において形状類否判定処理を実行しないこととする。
【0041】
一方、ステップS220にて、補正位置軌跡の全長が所定距離以上であると判定した場合、ステップS230において制御部20は、補正位置Pまたは検出位置Qに基づいて車両が地図情報30aの施設データに登録された施設(駐車場,サービスエリア,パーキングエリア等)である登録施設に進入しているか否かを判定する。ステップS230にて車両が地図情報30aに登録された登録施設に進入していると判定した場合には、制御部20は、マップマッチング処理のために検索範囲Aを調整する必要性がないとして、ステップS260において形状類否判定処理を実行しないこととする。本実施形態において、車両が地図情報30aに登録された登録施設に進入している場合には、マップマッチング処理の代わりに登録施設の属性に固有の処理を実行するため、マップマッチング処理の検索範囲Aを設定する実益がない。
【0042】
一方、ステップS230にて車両が地図情報30aに登録された施設に入庫していると判定しなかった場合には、ステップS240において制御部20は、補正位置Pまたは検出位置Qに基づいて車両が地図情報30aに登録された市街地地域を走行しているか否かを判定する。ステップS240にて車両が地図情報30aに登録された市街地地域を走行していると判定した場合には、制御部20は、マップマッチング処理のための検索範囲Aを小さくすることが望ましくないとして、ステップS260において形状類否判定処理を実行しないこととする。市街地地域以外の山岳道路等は道路の形状が複雑であり、検出位置軌跡Sの信頼度も低下しがちとなるため、検索範囲Aを小さくしてマップマッチング処理における走行道路の候補を減少させることは望ましくないからである。ステップS240にて車両が地図情報30aに登録された市街地地域を走行していると判定されなかった場合、ステップS250において制御部20は、形状類否判定処理を実行することとする。以上のようにして、形状類否判定処理を実行することとした場合、制御部20は図3AのステップS300において形状類否判定処理を実行する。
【0043】
(2−2−2)形状類否判定処理:
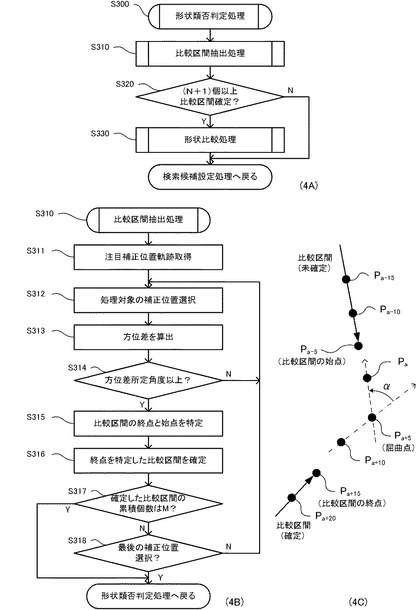
図4Aは、形状類否判定処理のフローチャートである。図4Aに示すように形状類否判定処理において、制御部20は、まずステップS310の比較区間抽出処理を実行する。
(2−2−2−1)比較区間抽出処理:
図4Bは、比較区間抽出処理のフローチャートである。ステップS311において制御部20は、注目補正位置軌跡を取得する。注目補正位置軌跡も注目検出位置軌跡と同様の手法により、現在の補正位置Pnから所定距離(186m)だけ遡った補正位置P n-155までの軌跡を注目補正位置軌跡として取得する。本実施形態では、処理負荷の軽減のため、制御部20は、156個の補正位置Pを5個周期で均等に抽出することにより、6mごと32個の補正位置Pn-5tによって構成される注目補正位置軌跡を取得する。
【0044】
ステップS312において制御部20は、注目補正位置軌跡を構成する補正位置Pの一つを処理対象として選択する。本実施形態では、現在の補正位置Pnから過去に向かって順に補正位置Pを処理対象として選択することとする。現在処理対象として選択された補正位置Pを補正位置Pa(a=n−5t)と表記する。ステップS313において制御部20は、図4Cの模式図に示すように1つ前に選択した補正位置Pa+5から現在選択している補正位置Paへ向かう方位(破線矢印)と、2つ前に選択した補正位置P a+10から1つ前に選択した補正位置P a+5へ向かう方位(一点鎖線矢印)との方位差αを算出する。そして、ステップS314において、制御部20は前記方位差αが所定角度(60度)以上であるか否かを判定する。すなわち、制御部20は、1つ前に選択した補正位置P a+5にて車両が60度以上旋回しているか否かを判定する。
【0045】
ステップS314にて方位差αが所定角度よりも小さいと判定された場合、制御部20は、ステップS312に戻り、次(1つ過去)の補正位置P a-5を選択する。一方、ステップS314にて方位差αが所定角度以上であると判定された場合、ステップS315において制御部20は、1つ前に選択した補正位置P a+5を屈曲点と特定し、3つ前に選択した補正位置P a+15を既存の比較区間の終点と特定し、1つ後に選択する補正位置P a-5を新たな比較区間の始点と特定する。なお、初期において現在の補正位置Pnを選択した場合には、ステップS312〜S314をスキップし、現在の補正位置Pnを比較区間の始点とする。
【0046】
以上の処理を繰り返して実行することにより、注目補正位置軌跡の形状が所定角度以上屈曲する屈曲点にて注目補正位置軌跡を分割した比較区間を形成することができる。また、屈曲点の前後所定距離(1.2×5×2=12m)以内の区間は比較区間から除かれることとなる。なお、比較区間は車両が60度以上旋回することなく走行した区間に対応するため、比較区間は直線に近い形状となる。次のステップS316において制御部20は、ステップS315にて終点が特定された比較区間を確定する。ステップS317において制御部20は、ステップS316にて確定した比較区間の累積個数が所定のM(M=3>N+1)個であったか否かを判定する。ステップS316にて確定した比較区間の累積個数がM個であった場合、制御部20は、比較区間抽出処理を終了させる。
【0047】
一方、ステップS316にて確定した比較区間の累積個数がM個未満であったとステップS317において判定した場合、制御部20は、ステップS318において注目補正位置軌跡を構成する補正位置Pのうち選択順が最後の補正位置P n-155を選択したか否かを判定する。選択順が最後の補正位置P n-155を選択していない場合、制御部20は、ステップS312に戻り、次(1つ過去)の補正位置Pを選択する。以上の処理を繰り返して実行することにより、確定した比較区間がM個抽出できた場合を除き、最後の補正位置P n-155を選択するまで注目補正位置軌跡から比較区間を抽出する処理を繰り返していくことができる。なお、最後の補正位置P n-155を選択した場合、ステップS315において制御部20は、ステップS312〜S314の結果に拘わらず、最後の補正位置P n-155を比較区間の終点とし、ステップS316にて当該比較区間を確定する。一方、制御部20は、ステップS316にて注目検出位置軌跡の形状との比較に使用するのに十分な数(M個)の比較区間が確定できたと判定した段階で、選択順が最後(最も過去)の補正位置P n-155を処理対象として選択するまで処理を繰り返すことなく、比較区間抽出処理を終了させる。これにより、処理負荷が軽減できる。以上のようにして、比較区間抽出処理が終了すると、制御部20は、図4Aの形状類否判定処理に戻り、ステップS320を実行する。
【0048】
図4AのステップS320において制御部20は、比較区間が(N+1)個以上確定できたか否かを判定する。本実施形態においてN=1であるため、制御部20は、比較区間が2個以上確定できたか否かを判定する。比較区間が(N+1)個以上確定できなかった場合、すなわち屈曲点がN個以上特定できなかった場合には、ステップS330の形状比較処理を実行しないこととする。つまり、注目検出位置軌跡の比較に使用するのに十分な数の比較区間が抽出できなかったとして、形状比較処理を実行しないこととする。一方、ステップS320において比較区間が(N+1)個以上確定できたと判定された場合、制御部20は、ステップS330にて形状比較処理実行する。
【0049】
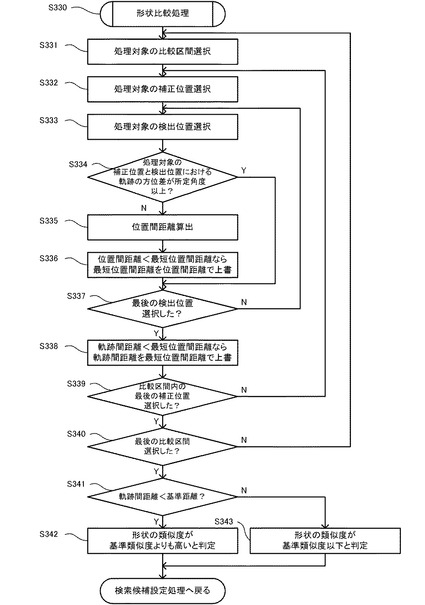
(2−2−2−2)形状比較処理:
図5は、形状比較処理のフローチャートである。まずステップS331において制御部20は、処理対象の比較区間を選択する。ここでは現在に近い順に比較区間を選択することとする。図6A,6Bは、注目補正位置軌跡X(実線)と注目検出位置軌跡Y(破線)を示す図である。ここで、形状比較処理は、注目補正位置軌跡Xと構成する各補正位置Pについて注目検出位置軌跡Yとの最短距離である最短位置間距離を算出し、各補正位置Pについての最短位置間距離のうち最長のものを軌跡間距離として算出する処理であり、処理対象の補正位置Pと検出位置Qとを順次切り替えるループ処理によって構成される。図6A,6Bでは、それぞれ3個の比較区間C1〜C3からなる注目補正位置軌跡Xが示されている。なお、注目補正位置軌跡Xは地図情報30aに登録された道路の形状(一点鎖線)に沿った形状となる。ステップS332において制御部20は、処理対象として選択した比較区間を構成する補正位置Pのうち1つを処理対象の補正位置Pとして選択する。ここでは、比較区間を構成する補正位置Pのうち現在に近いものから順に選択することとする。ステップS333において制御部20は、注目検出位置軌跡Yを構成する検出位置Qの1つを処理対象の検出位置Qとして選択する。ここでは現在に近い順に処理対象の検出位置Qを選択することとする。
【0050】
ステップS334において制御部20は、処理対象の検出位置Qにおいて注目検出位置軌跡Yが示す車両の方位と、処理対象の補正位置Pにおいて注目補正位置軌跡Xが示す車両の方位との方位差が所定角度(60度)以上であるか否かを判定する。処理対象の検出位置Qにおいて注目検出位置軌跡Yが示す車両の方位と、処理対象の補正位置Pにおいて注目補正位置軌跡Xが示す車両の方位との方位差が所定角度よりも小さいと判定された場合、ステップS335において制御部20は、処理対象の補正位置Pと、処理対象の検出位置Qとの距離である位置間距離を算出する。ステップS336において制御部20は、記録媒体30に保持された最短位置間距離よりもステップS335にて算出した位置間距離の方が短い場合に限り、ステップS335にて算出した位置間距離によって記録媒体30に記録された最短位置間距離を上書きする。一方、処理対象の検出位置において注目検出位置軌跡Yが示す車両の方位と、処理対象の補正位置において注目補正位置軌跡Xが示す車両の方位との方位差が所定角度以上であるとステップS334にて判定された場合、制御部20は、ステップS335〜S336をスキップし、ステップS337を実行する。
【0051】
ステップS337において制御部20は、注目検出位置軌跡Yを構成する検出位置Qのうち選択順が最後(最も過去)の検出位置Q n-155を選択したか否かを判定し、選択順が最後の検出位置Q n-155を選択していない場合には、ステップS333において次の検出位置Qを処理対象として選択する。以上の処理(ステップS333〜S337)を繰り返して実行することにより、処理対象の比較区間C1〜C3を構成する処理対象の補正位置Pと、注目検出位置軌跡Yを構成する各検出位置Qとの位置間距離を順次算出し、これらの位置間距離のうち最も短いものを最短位置間距離として記録媒体30に保持することができる。ただし、処理対象の検出位置Qにおいて注目検出位置軌跡Yが示す車両の方位と、処理対象の補正位置Pにおいて注目補正位置軌跡Xが示す車両の方位との方位差が所定角度(60度)以上の場合には位置間距離を算出しないため、注目検出位置軌跡Yのうち比較区間C1〜C3と平行に近い区間に属する検出位置Qと処理対象の補正位置Pとの最短位置間距離のみが記録媒体30に保持されることとなる。すなわち、補正位置Pにおける注目補正位置軌跡Xの方位と平行に近い注目検出位置軌跡Yの区間内の検出位置Qであって補正位置Pとの位置間距離が最短となる検出位置Qが探索され、当該検出位置Qと補正位置Pとの距離である最短位置間距離が記録媒体30に保持されることとなる。
【0052】
一方、注目検出位置軌跡Yを構成する検出位置Qのうち選択順が最後(最も過去)の検出位置Q n-155を選択したとステップS337にて判定した場合、ステップS338において制御部20は、記録媒体30に保持されている軌跡間距離よりも記録媒体30に保持されている最短位置間距離の方が長い場合に限り、最短位置間距離で軌跡間距離を上書きする。また、ステップS338において制御部20は、記録媒体30に保持されていた最短位置間距離を消去する。ステップS339において制御部20は、処理対象の比較区間C1〜C3を構成する補正位置のうち選択順が最後(最も過去)の補正位置を選択したか否かを判定する。処理対象の比較区間C1〜C3を構成する補正位置Pのうち選択順が最後の補正位置Pを処理対象として選択していないとステップS339にて判定した場合、制御部20は、ステップS332に戻り、処理対象の比較区間C1〜C3を構成する次の補正位置Pを処理対象として選択する。
【0053】
処理対象の比較区間C1〜C3を構成する補正位置Pのうち選択順が最後の補正位置Pを処理対象として選択したとステップS339にて判定した場合、ステップS340において制御部20は、選択順が最後(最も過去)の比較区間C3を処理対象として選択したか否かを判定する。選択順が最後の比較区間C3を処理対象として選択していないとステップS340にて判定した場合、制御部20は、ステップS331に戻り、次の比較区間C2〜C3を処理対処として選択する。以上の処理(ステップS331〜S340)を繰り返して実行することにより、各比較区間C1〜C3に属する各補正位置Pを処理対象として順次選択していき、各補正位置Pと注目検出位置軌跡Yとの最短距離である最短位置間距離を順次算出していくことができる。さらに、各補正位置Pについての最短位置間距離のうち最長となるものを、最終的に軌跡間距離として記録媒体30に保持することができる。すなわち、注目補正位置軌跡Xと注目検出位置軌跡Yとが互いに平行に近くなる区間における注目補正位置軌跡Xと注目検出位置軌跡Yとの距離の最大値を軌跡間距離として特定することができる。ステップS331〜332においては、屈曲点から所定距離(12m)以上離れた比較区間に属する補正位置Pのみが処理対象として選択されるため、道路の形状と車両の実際の軌跡とが大きく乖離しがちな交差点等の軌跡に基づいて軌跡間距離が特定されることが防止できる。
【0054】
一方、選択順が最後の比較区間C1〜C3を処理対象として選択したとステップS340にて判定した場合、ステップS341において制御部20は、記録媒体30に保持されている軌跡間距離が所定の基準距離(10m)よりも短いか否かを判定する。すなわち、制御部20は、注目補正位置軌跡Xと注目検出位置軌跡Yとが互いに平行に近くなる区間における注目補正位置軌跡Xと注目検出位置軌跡Yとの距離の最大値である軌跡間距離が基準距離よりも短いか否かを判定する。そして、軌跡間距離が基準距離よりも短いと判定した場合、ステップS342において制御部20は、注目補正位置軌跡Xと注目検出位置軌跡Yとの類似度が所定の基準類似度よりも高いとする。本実施形態において、注目補正位置軌跡Xと注目検出位置軌跡Yとの類似度が所定の基準類似度よりも高いことは、注目補正位置軌跡Xの信頼度が所定の基準信頼度よりも高いことと同義である。反対に、軌跡間距離が基準距離以上であると判定した場合、ステップS343において制御部20は、注目補正位置軌跡Xと注目検出位置軌跡Yとの類似度が所定の基準類似度以下であると判定する。本実施形態において、注目補正位置軌跡Xと注目検出位置軌跡Yとの類似度が所定の基準類似度以下であることは、注目補正位置軌跡Xの信頼度が基準信頼度以下であることと同義である。
【0055】
図6Bでは注目検出位置軌跡Yが注目補正位置軌跡Xに対して紙面左側にシフトしており、軌跡間距離Dが基準距離以上となっている。図6Bのように、軌跡間距離Dが基準距離以上となる場合、注目検出位置軌跡Yが道路の形状に対応する注目補正位置軌跡Xから大きく乖離した形状となり、注目検出位置軌跡Yが車両の現実の走行軌跡を表している可能性が低く、注目検出位置軌跡Yの信頼度が低いと判断できる。以上により形状類否判定処理が完了すると、制御部20は、図3Aの検索候補設定処理に戻り、ステップS400の検索範囲設定処理を実行する。
【0056】
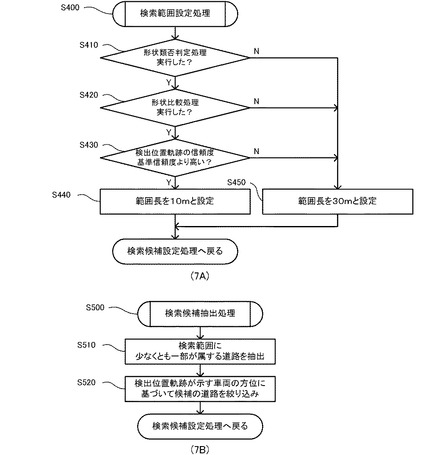
(2−2−3)検索範囲設定処理:
図7Aは、検索範囲設定処理のフローチャートである。ステップS410において制御部20は、形状類否判定処理を実行したか否かを判定する。形状類否判定処理を実行しなかったと判定した場合には、ステップS450において制御部20は、検索範囲Aの範囲長Lを30mと設定する。一方、形状類否判定処理を実行したとステップS410にて判定した場合には、ステップS420において制御部20は、形状比較処理を実行したか否かを判定する。形状比較処理を実行しなかったと判定した場合には、ステップS450において制御部20は、検索範囲Aの範囲長Lを30mと設定する。すなわち、形状類否判定処理と形状比較処理とを実行しなかった場合、検出位置軌跡Sの信頼度が基準信頼度以下である可能性があるため、検索範囲Aの範囲長Lを30mと設定する。
【0057】
一方、形状比較処理を実行したとステップS420にて判定した場合には、ステップS430において制御部20は、注目補正位置軌跡Xと注目検出位置軌跡Yとの類似度が基準類似度よりも高いと判定されたか否か、すなわち注目検出位置軌跡Yの信頼度が基準信頼度よりも高いか否を判定する。注目補正位置軌跡Xと注目検出位置軌跡Yとの類似度が基準類似度よりも高いと判定されなかった場合、ステップS450において制御部20は、検索範囲Aの範囲長Lを30mと設定する。注目補正位置軌跡Xと注目検出位置軌跡Yとの類似度が基準類似度よりも高いと判定された場合、ステップS440において制御部20は、検索範囲Aの範囲長Lを10mと設定する。以上のようにして検索範囲Aの範囲長Lを設定すると検索範囲設定処理が終了し、制御部20は、図3Aの検索候補設定処理に戻り、ステップS500の検索候補抽出処理を実行する。
【0058】
(2−2−4)検索候補抽出処理:
図7Bは、検索候補抽出処理のフローチャートである。ステップS510において地図情報取得部21bの機能により制御部20は、図7AのステップS440,S450にて設定された検索範囲Aに少なくとも一部が属する道路を地図情報30aから走行道路の候補として抽出する。図2Aでは道路R1〜R4が走行道路の候補として抽出され、図2Bでは道路R1のみが走行道路の候補として抽出される。ステップS520において地図情報取得部21bの機能により制御部20は、検出位置軌跡Sが示す車両の方位に基づいて、走行道路の候補の絞り込みを行う。すなわち、制御部20は、検出位置軌跡Sが示す車両の現在の方位との平行度が所定基準以下となる道路を走行道路の候補から除外することにより、走行道路の候補を絞り込む。図2Aでは検出位置軌跡Sが示す車両の現在の方位とほぼ平行な道路R2,R3のみが走行道路の候補として絞り込まれる。一方、図2Bでは唯一の候補である道路R1と検出位置軌跡Sが示す車両の現在の方位とがほぼ直角となっているため、走行道路の候補が存在しないとされる。以上により検索候補抽出処理(検索範囲設定処理)が終了し、制御部20は、図3Aの検索候補設定処理のステップS100に戻り、次に車両が単位距離を走行するまで待機する。また、検索範囲設定処理と並行して実行されるマップマッチング処理においては検索候補抽出処理にて絞り込まれた走行道路の候補のなかから検出位置軌跡Sの形状と最も類似する形状を有する道路が走行道路として特定されることとなる。以上説明した検索候補設定処理を周期的に実行することにより、刻々と変化する注目検出位置軌跡Yの信頼度に応じた検索範囲Aを設定していくことができる。
【0059】
(3)他の実施形態:
検出位置軌跡取得部21aの機能により制御部20は、車両に備えられた検出器の出力信号に基づく検出位置Qの時系列の軌跡である検出位置軌跡Sを取得すればよく、検出器としてのGPS受信器43のみの出力信号に基づく検出位置Qの軌跡である検出位置軌跡Sを取得してもよい。また、検索範囲Aは補正位置Pを基準として定められる範囲であり、補正位置Pを重心等とした所定図形に対応する範囲であってもよい。また、検索範囲Aを補正位置Pに到達するまでに走行する必要がある道路区間に対応するリンクの数に基づいて定めてもよい。
【0060】
検索範囲設定部21eの機能により制御部20は、検索範囲Aを検出位置軌跡Sの信頼度に応じて2段階以上に段階的に小さくしてもよいし、連続的に小さくしてもよい。検索範囲設定部21eの機能により制御部20は、検出位置軌跡Sを得るための検出器の動作状況に基づいて検出位置軌跡Sの信頼度を特定してもよい。すなわち、必ずしも検出位置軌跡Sの形状と補正位置軌跡の形状との比較により検出位置軌跡Sの信頼度を評価しなくてもよい。例えば、検出位置軌跡Sの形状と地図情報30aに登録された道路の形状とを比較して検出位置軌跡Sの信頼度を評価してもよい。また、検索範囲設定部21eの機能により制御部20は、補正位置軌跡の形状と検出位置軌跡Sの形状とから特徴点(屈曲点等)を抽出し、当該特徴点の比較により補正位置軌跡の形状と検出位置軌跡Sの形状との類似度を特定してもよい。
【0061】
さらに、前記実施形態において、検索範囲設定部21eの機能により制御部20は、検出位置軌跡Sのうち注目期間に対応する部分である注目検出位置軌跡の形状と、補正位置軌跡のうち注目期間に対応する部分である注目補正位置軌跡の形状との類似度を特定したが、例えば電源がオンとなってから現在までに取得された検出位置軌跡Sの全形状と補正位置軌跡の全形状との類似度に基づいて検出位置軌跡Sの信頼度を評価してもよい。なお、注目期間は、期間の長さによって定められてもよい。
【0062】
また、前記実施形態において、検索範囲設定部21eの機能により制御部20は、注目検出位置軌跡の形状においてN個以上の屈曲点が含まれない場合に、注目検出位置軌跡の形状と注目補正位置軌跡の形状との類似度の判定を行わないようにしたが、屈曲点が含まれるか否かに拘わらず注目検出位置軌跡の形状と注目補正位置軌跡の形状との類似度の判定を行ってもよい。なお、屈曲点は軌跡の形状の曲率半径が所定値以下となる点であってもよい。
【符号の説明】
【0063】
10…補正位置特定装置、20…制御部、21…ナビゲーションプログラム、21a…検出位置軌跡取得部、21b…地図情報取得部、21c…走行道路検索部、21d…補正位置特定部、21e…検索範囲設定部、30…記録媒体、30a…地図情報、40…ユーザI/F部、41…車速センサ、42…ジャイロセンサ、43…GPS受信部、A…検索範囲、C1〜C3…比較区間、D…軌跡間距離、L…範囲長、P…補正位置、Q…検出位置、R1〜R4…道路、S…検出位置軌跡、W…所定幅、X…注目補正位置軌跡、Y…注目検出位置軌跡。
【技術分野】
【0001】
本発明は、マップマッチング処理により車両の補正位置を特定する技術に関する。
【背景技術】
【0002】
車両が走行する道路に沿いに交差点と駐車場とが存在する場合に、車両が交差点から他の道路へ進入したのか、駐車場へ進入したのかを判別するナビゲーション装置が提案されている(特許文献1、参照)。特許文献1のナビゲーション装置は、車両が一定速度以下に減速して、さらに旋回した場合に、車両の位置から一定範囲内に駐車場が存在するか否かを判定する。そして、車両の位置から一定範囲内に駐車場が存在する場合には、車両が交差点から他の道路に進入したのではなく駐車場に進入したとしてし、当該他の道路へのマップマッチングを中止する。これにより、駐車場へ進入したことを早期に特定し、他の道路への誤ったマップマッチングを早期に停止させることができる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平10−197268号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1の技術は、道路沿いに駐車場が存在していることが地図情報等により特定できる場合には有効であるが、道路沿いに駐車場が存在していることが特定できない場合には、駐車場等へ車両が進入したことを早期に特定できないという問題があった。
本発明は、上記課題にかんがみてなされたもので、地図情報に登録された道路外に車両が進入したことを早期に特定する技術の提供を目的とする。
【課題を解決するための手段】
【0005】
上記の目的を達成するため、本発明において、検出位置軌跡取得手段は、車両に備えられた検出器の出力信号に基づく車両の位置を示す検出位置の時系列の軌跡を検出位置軌跡として取得する。走行道路検索手段は、車両の位置から所定の検索範囲内に存在し、かつ、検出位置軌跡の形状と類似する形状を有する道路である走行道路を地図情報にて検索する。なお、地図情報は道路の位置および形状を示す情報であり、地図情報取得手段によって取得される。補正位置特定手段は、検出位置を走行道路上の位置へと補正することにより、車両の位置を示す補正位置を特定する。そして、検索範囲設定手段は、検出位置軌跡の信頼度が所定の基準信頼度よりも高い場合に、信頼度が基準信頼度以下である場合よりも、検索範囲を小さくする。
【0006】
検出位置軌跡の信頼度が基準信頼度よりも高い場合に、検索範囲設定手段が検索範囲を小さくすることにより、走行道路検索手段が地図情報にて検索する走行道路の候補の数を減少させることができる。地図情報にて検索する走行道路の候補の数を減少させておくことにより、当該候補のすべての道路の形状が検出位置軌跡の形状と類似しなくなる可能性を高めることができる。従って、刻々と変化する検出位置軌跡の形状に対して類似する形状を有する候補の道路が存在しなくなるまでの所要期間を短縮できる。すなわち、走行道路が検索できなくなり、地図情報に登録された道路のいずれにも車両が進入せず、地図情報に登録された道路外へ車両が進入したことを早期に特定できる。ところで、検索範囲は車両の位置からの範囲であり、検出位置からの範囲であってもよいし、補正位置からの範囲であってもよい。ここで、検出位置軌跡の信頼度が低い場合には検出位置と補正位置の特定精度も低くなるため、車両の位置からの検索範囲を小さくすることによって車両が現実に走行している道路が走行道路として検索されなくなる弊害も生じ得る。これに対して、検索範囲設定手段は、検出位置軌跡の信頼度が所定の基準信頼度以下の場合には検索範囲を小さくしないため、検出位置軌跡の信頼度が低い場合に車両が現実に走行している道路が走行道路として検索されなくなることが防止できる。
【0007】
検出位置軌跡取得手段は車両に備えられた検出器の出力信号に基づく検出位置の時系列の軌跡である検出位置軌跡を取得すればよく、検出器としてのGPS受信器と車速センサとの出力信号に基づく検出位置の軌跡である検出位置軌跡を取得してもよいし、検出器としてのGPS受信器の出力信号のみに基づく検出位置の軌跡である検出位置軌跡を取得してもよい。また、検出器としてのGPS受信器と車速センサとジャイロセンサとの出力信号を総合して得られた検出位置の軌跡である検出位置軌跡を取得してもよい。また、補正位置軌跡は地図情報が示す走行道路の形状が反映された形状を有する軌跡であるのに対して、地図情報に基づく補正が行われていない検出位置の軌跡である。
【0008】
走行道路検索手段は、車両の位置から所定の検索範囲内に存在する道路を走行道路の候補とし、これらの候補のうち検出位置軌跡の形状と類似する形状を有する道路を走行道路として検索する。例えば、走行道路検索手段は、走行道路の候補のうち検出位置軌跡との類似度が最も高い道路を走行道路として検索してもよいし、さらに走行道路の候補のうち検出位置軌跡との類似度が最も高く、かつ、所定の閾値よりも高い道路を走行道路として検索してもよい。なお、検索範囲は補正位置を基準として定められる範囲であり、補正位置を重心等とした所定図形に対応する範囲であってもよいし、過去に検索された走行道路に沿った範囲であってもよい。さらに、検索範囲を補正位置に到達するまでに走行する必要がある道路区間に対応するリンクの数に基づいて定めてもよい。
【0009】
補正位置特定手段は、検出位置を走行道路上の位置へと補正することにより、車両の位置を示す補正位置を特定すればよく、走行道路上の位置のうち検出位置から最も近い位置を補正位置として特定してもよい。また、補正位置特定手段は、過去の所定時刻から現在に至るまでの車両の変位を検出位置軌跡に基づいて特定し、過去の所定時刻における補正位置に前記変位を加えた位置を現在の補正位置と特定してもよい。
【0010】
検索範囲設定手段は、検出位置軌跡の信頼度が基準信頼度よりも高い場合に、信頼度が基準信頼度以下である場合よりも検索範囲を小さくすればよく、少なくとも信頼度が基準信頼度よりも高い場合と、信頼度が基準信頼度以下の場合とで検索範囲の大きさを切り替えればよい。さらに、検索範囲設定手段は、検出位置軌跡の信頼度に応じて検索範囲を段階的に小さくしてもよいし、連続的に小さくしてもよい。
【0011】
検索範囲設定手段は、種々の手法により検出位置軌跡の信頼度を特定できる。例えば、検出位置軌跡を得るための検出器の動作状況に基づいて検出位置軌跡の信頼度を特定してもよいし、検出位置軌跡の形状が車両の走行軌跡の形状として現実性の高いものであるか否かに基づいて信頼度を特定してもよい。さらに、補正位置の時系列の軌跡である補正位置軌跡と、検出位置軌跡との比較に基づいて検出位置軌跡の信頼度を特定してもよい。すなわち、補正位置軌跡と検出位置軌跡との類似度が基準類似度よりも高いか否かを判定し、類似度が基準類似度よりも高い場合に、検出位置軌跡の信頼度が基準信頼度よりも高いとしてもよい。補正位置軌跡は走行道路上の補正位置の軌跡であるため、車両の走行軌跡として現実性の高い軌跡であり、当該補正位置軌跡に形状が類似すれば検出位置軌跡の信頼度は高いということができる。
【0012】
さらに、検索範囲設定手段は、補正位置軌跡と検出位置軌跡との類似度を、補正位置軌跡と検出位置軌跡との距離に基づいて特定してもよい。すなわち、検索範囲設定手段は、補正位置軌跡と検出位置軌跡との距離が所定の基準距離よりも短い場合に、補正位置軌跡と検出位置軌跡との類似度が基準類似度よりも高いと判定してもよい。補正位置軌跡と検出位置軌跡との距離が短いほど、検出位置軌跡の形状は現実の道路の形状に近く、検出位置軌跡の信頼度が高いということができる。例えば、補正位置軌跡と検出位置軌跡との距離は、補正位置軌跡と検出位置軌跡との距離の最大値や最小値や平均値等に基づいて把握することができる。さらに、検索範囲設定手段は、補正位置軌跡の形状と検出位置軌跡の形状とから特徴点を抽出し、当該特徴点の比較により補正位置軌跡と検出位置軌跡との類似度を特定してもよい。さらに、検索範囲設定手段は、補正位置軌跡の形状に含まれる直線部分と、検出位置軌跡に含まれる直線部分との方位差に基づいて類似度を特定してもよい。
【0013】
さらに、検索範囲設定手段は、検出位置軌跡のうち現在まで連続する所定の注目期間に対応する部分である注目検出位置軌跡と、補正位置軌跡のうち注目期間に対応する部分である注目補正位置軌跡との類似度が基準類似度よりも高いか否かを判定してもよい。類似度を判定する部分を注目期間に対応する部分に限ることにより、信頼度を判定するための処理負荷を軽減できる。また、注目期間は現在を含む期間であるため、検出位置軌跡の最新の信頼度を特定できる。なお、注目期間は、期間の長さによって定められてもよいし、注目期間に車両が走行する距離によって定められてもよい。
【0014】
また、検索範囲設定手段は、注目検出位置軌跡の形状と注目補正位置軌跡の形状との少なくとも一方においてN個以上(自然数)の屈曲点が含まれない場合に、注目検出位置軌跡と注目補正位置軌跡との類似度の判定を行わないようにしてもよい。注目検出位置軌跡の形状と注目補正位置軌跡の形状に屈曲点が少ないほど、注目検出位置軌跡の形状と注目補正位置軌跡の形状の特徴が乏しくなるため、注目検出位置軌跡と注目補正位置軌跡との類似度を高精度に特定できなくなる。このような場合には、検出位置軌跡と補正位置軌跡との類似度の判定を行わないことにより、処理負荷を軽減させるとともに、精度の低い形状の類似度に基づいて検索範囲が設定されることが防止できる。なお、屈曲点は軌跡の形状を構成する2個の直線がなす角が所定角度以上である点であってもよいし、軌跡の形状の曲率半径が所定値以下となる点であってもよい。
【0015】
さらに、本発明のように、走行道路を検索する検索範囲を調整する手法は、プログラムや方法としても適用可能である。また、以上のような装置、プログラム、方法は、単独の装置として実現される場合もあれば、車両に備えられる各部と共有の部品を利用して実現される場合もあり、各種の態様を含むものである。例えば、以上のような装置を備えたナビゲーション装置や方法、プログラムを提供することが可能である。また、一部がソフトウェアであり一部がハードウェアであったりするなど、適宜、変更可能である。さらに、装置を制御するプログラムの記録媒体としても発明は成立する。むろん、そのソフトウェアの記録媒体は、磁気記録媒体であってもよいし光磁気記録媒体であってもよいし、今後開発されるいかなる記録媒体においても全く同様に考えることができる。
【図面の簡単な説明】
【0016】
【図1】補正位置特定装置のブロック図である。
【図2】(2A),(2B)はマップマッチング処理を示す模式図である。
【図3】(3A)は検索候補設定処理のフローチャート、(3B)は実行可否判定処理のフローチャートである。
【図4】(4A)は形状類否判定処理のフローチャート、(4B)は比較区間抽出処理のフローチャート、(4C)は比較区間抽出処理の模式図である。
【図5】形状比較処理のフローチャートである。
【図6】(6A),(6B)は、注目補正位置軌跡と注目検出位置軌跡とを示す図である。
【図7】(7A)は検索範囲設定処理のフローチャート,(7B)は検索候補抽出処理のフローチャートである。
【発明を実施するための形態】
【0017】
ここでは、下記の順序に従って本発明の実施の形態について説明する。
(1)補正位置特定装置の構成:
(2)補正位置特定処理:
(2−1)マップマッチング処理:
(2−2)検索候補設定処理:
(2−2−1)実行可否判定処理:
(2−2−2)形状類否判定処理:
(2−2−2−1)比較区間抽出処理:
(2−2−2−2)形状比較処理:
(2−2−3)検索範囲設定処理:
(2−2−4)検索候補抽出処理:
(3)他の実施形態:
【0018】
(1)補正位置特定装置の構成:
図1は、本発明にかかる補正位置特定装置10の構成を示すブロック図である。補正位置特定装置10は、制御部20と記録媒体30を備える。制御部20は、CPUとRAMとROM等を備え、記録媒体30やROMに記憶された各種プログラムを実行する。記録媒体30は、地図情報30aを記録する。地図情報30aは、車両が走行する道路上に設定されたノードの位置等を示すノードデータと、ノード間の道路の形状を特定するための形状補間点データと、ノード同士の連結を示すリンクデータと、道路やその周辺に存在する地物の位置および種類等を示す地物データ等を含んでいる。
【0019】
補正位置特定装置10は車両に搭載される。補正位置特定装置10が搭載された車両は、ユーザI/F部40と車速センサ41とジャイロセンサ42とGPS受信部43とを備えている。なお、車速センサ41とジャイロセンサ42とGPS受信部43とは検出器を構成する。本実施形態において、ユーザI/F部40は、ユーザからの操作を受け付ける受付手段と地図を表示させる表示手段とを兼ねるタッチパネルを有する。車速センサ41は、車両が備える車輪の回転速度に対応した出力信号を補正位置特定装置10の制御部20に出力する。ジャイロセンサ42は、車両に作用する角速度に対応した出力信号を補正位置特定装置10の制御部20に出力する。GPS受信部43は、GPS衛星からの電波を受信し、車両の位置を特定するための出力信号を補正位置特定装置10の制御部20に出力する。
【0020】
制御部20は、上述した各種プログラムの一つとしてナビゲーションプログラム21を実行する。ナビゲーションプログラム21は、検出位置軌跡取得部21aと地図情報取得部21bと走行道路検索部21cと補正位置特定部21dと検索範囲設定部21eとを含む。
【0021】
検出位置軌跡取得部21aは、車両に備えられた検出器の出力信号に基づく車両の位置を示す検出位置の時系列の軌跡を検出位置軌跡として取得する機能を制御部20に実行させるモジュールである。すなわち、検出位置軌跡取得部21aの機能により制御部20は、車速センサ41とジャイロセンサ42とGPS受信部43の出力信号を取得する。そして、検出位置軌跡取得部21aの機能により制御部20は、車速センサ41の出力信号およびジャイロセンサ42の出力信号に基づいて、車両が所定の単位距離(1.2m)走行するごとに現在の車両の位置を検出位置として特定する。検出位置軌跡取得部21aの機能により制御部20は、ジャイロセンサ42の出力信号に基づいて、車両が単位距離走行する期間において変化した車両の方位の変化量を相対方位として取得する。なお、車両が単位距離走行したか否かは車速センサ41の出力信号に基づく車速の時間積分値に基づいて判断できる。検出位置軌跡取得部21aの機能により制御部20は、車両が単位距離走行するごとの相対方位を現在まで累積することにより、車両の現在の方位である検出方位を取得する。検出位置軌跡取得部21aの機能により制御部20は、前回の周期にて特定した検出位置から、今回の周期にて特定した検出方位へ単位距離だけ移動した位置を今回の周期における検出位置として取得する。
【0022】
なお、検出位置軌跡取得部21aの機能により制御部20は、例えば検出器としてのGPS受信部43の出力信号に基づいて初期の検出位置と初期の検出方位を特定する。初期の検出方位に対して相対方位を順次累積していくことにより、絶対方位としての検出方位を更新していくことができる。また、初期の検出位置を基準として検出方位へ単位距離だけ移動する処理を繰り返すことにより、絶対位置としての検出位置を更新していくことができる。検出位置軌跡取得部21aの機能により制御部20は、時系列の検出位置の軌跡を検出位置軌跡として取得する。なお、検出位置軌跡取得部21aの機能により制御部20は、GPS受信部43の出力信号に基づく車両の位置の軌跡と整合するように検出位置軌跡を適宜補正してもよい。検出位置軌跡取得部21aの機能により制御部20は、以上のようにして取得した検出位置の時系列の軌跡を検出位置軌跡として取得する。
【0023】
地図情報取得部21bは、道路の位置および形状を示す地図情報30aを取得する機能を制御部20に実行させるモジュールである。すなわち、地図情報取得部21bの機能により制御部20は、記録媒体30から地図情報30aを読み出す。走行道路検索部21cは、車両の位置から所定の検索範囲内に存在し、かつ、検出位置軌跡の形状と類似する形状を有する道路である走行道路を地図情報30aにて検索する機能を制御部20に実行させるモジュールである。すなわち、走行道路検索部21cの機能により制御部20は、車両の位置を示す補正位置から検索範囲内に存在する道路を走行道路の候補を地図情報30aから取得し、さらに走行道路の候補のうち検出位置軌跡の形状との類似度が最も高い形状を有する道路を走行道路として検索する。
【0024】
補正位置特定部21dは、走行道路が検索できた場合、検出位置を走行道路上の位置へ補正することにより、車両の位置を示す補正位置を特定する機能を制御部20に実行させるモジュールである。すなわち、補正位置特定部21dの機能により制御部20は、走行道路が検索できた場合には、検出位置軌跡に基づいて、走行道路上の位置から車両の補正位置を特定する。例えば、補正位置特定部21dの制御部20は、検出位置軌跡に基づく現在の検出位置から走行道路上の最も近い位置を補正位置として特定する。本実施形態では、車両が単位距離(1.2m)だけ走行するごとに検出位置が特定されるため、互いに連続する周期にて特定された補正位置同士の距離も単位距離とほぼ一致する。一方、走行道路が検索できなかった場合、補正位置特定部21dの機能により制御部20は、地図情報30aに登録された道路外の位置を車両が走行すると特定(オフロード判定)する。
【0025】
以上のように上述した各モジュール21a〜21dの機能により制御部20は、地図情報30aと検出位置軌跡とに基づいて車両が走行している走行道路を検索するとともに、走行道路が検索できた場合には検出位置軌跡に基づいて当該走行道路上において補正位置を特定するマップマッチング処理を実行する。ただし、例外として走行道路が検索できなかった場合には、制御部20は、地図情報30aに登録された道路上ではない位置を車両が走行していると特定する。なお、走行道路が検索できるための条件は、車両の位置から所定の検索範囲内に存在し、かつ、検出位置軌跡の形状と類似する形状を有する道路が1つでも地図情報30aに登録されていることである。従って、検索範囲が小さいほど走行道路の候補の数を減少させることができ、走行道路が検索できないと判明するまでの所要期間も短縮でき、地図情報30aに登録されている道路外の位置を車両が走行していることを早期に特定できる。検索範囲設定部21eは、以上の性質を有する検索範囲を設定するためのモジュール、すなわち地図情報30aに登録されている道路外の位置を車両が走行していると特定されるまでの所要期間を調整するためのモジュールとして位置づけられる。
【0026】
検索範囲設定部21eは、検出位置軌跡の信頼度が所定の基準信頼度よりも高い場合に、信頼度が基準信頼度以下である場合よりも、検索範囲を小さくする機能を制御部20に実行させるモジュールである。すなわち、検索範囲設定部21eの機能により制御部20は、検出位置軌跡の信頼度が所定の基準信頼度よりも高いか否かを判定し、検出位置軌跡の信頼度が所定の基準信頼度よりも高い場合には、検索範囲を小さくする。
【0027】
検索範囲設定部21eの機能により制御部20は、検出位置軌跡の信頼度が所定の基準信頼度よりも高いか否かを、以下の具体的手法により判定する。すなわち、検索範囲設定部21eの機能により制御部20は、補正位置の時系列の軌跡である補正位置軌跡と、検出位置軌跡との類似度が所定の基準類似度よりも高い場合に、検出位置軌跡の信頼度が基準信頼度よりも高いとする。より具体的に、検索範囲設定部21eの機能により制御部20は、補正位置軌跡のうち現在まで連続する所定の注目期間に対応する部分である注目補正位置軌跡と、検出位置軌跡のうち注目期間に対応する部分である注目検出位置軌跡との距離が所定の基準距離より短い場合に、補正位置軌跡と検出位置軌跡との類似度が基準類似度より高いとする。本実施形態において、現在の検出位置から所定距離だけ遡った検出位置までの軌跡を注目検出位置軌跡とする。この場合、現在の検出位置から所定距離だけ遡った検出位置が検出された時刻を始期とし、現在を終期とする期間が注目期間となる。また、検索範囲設定部21eの機能により制御部20は、注目検出位置軌跡にN(N=1)個以上の屈曲点が含まれない場合に、注目補正位置軌跡部分と注目検出位置軌跡との類似度が基準類似度よりも高いか否かの判定をすることなく検索範囲を設定する。すなわち、現在まで連続して車両が所定距離以上直進していることが注目検出位置軌跡によって示される場合には、注目補正位置軌跡部分と注目検出位置軌跡との類似度を解析する処理を省略する。
【0028】
以上説明した本実施形態の構成において、検出位置軌跡の信頼度が基準信頼度よりも高い場合に、制御部20が検索範囲を小さくすることにより、制御部20が地図情報30aにて検索する走行道路の候補の数を減少させることができる。地図情報30aにて検索する走行道路の候補の数を減少させておくことにより、当該候補のすべての道路の形状が検出位置軌跡の形状と類似しなくなる可能性を高めることができる。従って、刻々と変化する検出位置軌跡の形状に対して類似する形状を有する候補の道路が存在しなくなるまでの所要期間を短縮できる。すなわち、走行道路が検索できなり、地図情報30aに登録された道路のいずれにも車両が進入せず、地図情報30aに登録された道路外へ車両が進入したことを早期に特定できる。ところで、検出位置軌跡の信頼度が低い場合には補正位置の特定精度も低くなるため、補正位置からの検索範囲を小さくすることによって車両が現実に走行している道路が走行道路として検索されなくなる弊害も生じ得る。これに対して、制御部20は、検出位置軌跡の信頼度が所定の基準信頼度以下の場合に検索範囲を小さくしないため、検出位置軌跡の信頼度が低い場合に車両が現実に走行している道路が走行道路として検索されなくなることが防止できる。
【0029】
本実施形態の制御部20は、検出位置軌跡が車両の走行軌跡として現実性の高いものであるか否かに基づいて信頼度を特定している。すなわち、制御部20は、補正位置軌跡と検出位置軌跡との類似度が基準類似度よりも高いか否かを判定し、類似度が基準類似度よりも高い場合に、検出位置軌跡の信頼度が基準信頼度よりも高いとしている。補正位置軌跡は走行道路上の補正位置の軌跡であるため、車両の走行軌跡として現実性の高い軌跡であり、当該補正位置軌跡に形状が類似すれば検出位置軌跡の信頼度は高いからである。
【0030】
さらに、制御部20は、補正位置軌跡と検出位置軌跡との距離が所定の基準距離よりも短い場合に、類似度が基準類似度よりも高いと判定する。補正位置軌跡と検出位置軌跡との距離が短いほど、検出位置軌跡の形状は現実の道路の形状に近く、検出位置軌跡の信頼度が高いということができる。より具体的に、制御部20は、検出位置軌跡のうち現在まで連続する所定の注目期間に対応する部分である注目検出位置軌跡と、補正位置軌跡のうち注目期間に対応する部分である注目補正位置軌跡との類似度が基準類似度よりも高いか否かを判定している。類似度を判定する部分を注目期間に対応する部分に限ることにより、信頼度を判定するための処理負荷を軽減できる。また、注目期間は現在を含む期間であるため、検出位置軌跡の最新の信頼度を特定できる。
【0031】
また、制御部20は、注目検出位置軌跡の形状または注目補正位置軌跡の形状にN(N=1)個以上の屈曲点が含まれない場合に、注目検出位置軌跡と注目補正位置軌跡との類似度の判定を行わないようにしている。注目検出位置軌跡の形状または注目補正位置軌跡の形状に屈曲点が少ないほど、注目検出位置軌跡の形状または注目補正位置軌跡の形状の特徴が乏しくなるため、注目検出位置軌跡と注目補正位置軌跡との類似度を高精度に特定できなくなる。このような場合には、検出位置軌跡と補正位置軌跡との類似度の判定を行わないことにより、処理負荷を軽減させるとともに、精度の低い形状の類似度に基づいて検索範囲が設定されることが防止できる。
【0032】
(2)補正位置特定処理:
次に、ナビゲーションプログラム21の機能により制御部20が実行する補正位置特定処理を説明する。補正位置特定処理は、それぞれ所定の周期ごとに実行されるマップマッチング処理と検索候補設定処理とを含む。ここでは、まずマップマッチング処理について説明する。
【0033】
(2−1)マップマッチング処理:
図2A,2Bはマップマッチング処理を示す模式図である。なお、図2A,2Bは、互いに同一の道路R1〜R4を示す。上述のようにマップマッチング処理は車両が単位距離走行する周期ごとに実行される処理である。現在の周期の番号をn(自然数)と表記する。図2A,2Bにように、検出位置軌跡取得部21aの機能により制御部20は、検出位置軌跡S(破線)を取得する。すなわち、検出位置軌跡取得部21aの機能により制御部20は、車両が単位距離走行するごと車速センサ41およびジャイロセンサ42の出力信号に基づいて検出位置Qnを特定し、現在の検出位置Qnが先頭となる時系列の検出位置Qn,Q n-1,Q n-2・・・(白丸)の軌跡を検出位置軌跡Sとして取得する。
【0034】
次に、走行道路検索部21cの機能により制御部20は、検索範囲A(一点鎖線枠)に少なくとも一部が属する道路を走行道路の候補として取得し、当該候補のうち検出位置軌跡Sの形状との類似度が最も高い形状を有する道路を走行道路として検索する。検索範囲Aは、後述する検索候補設定処理によって所定の周期ごとに設定され、具体的に検索候補設定処理において検索範囲Aの大きさを規定する範囲長Lが設定される。検索範囲Aは、直前の周期(n−1)にて特定された補正位置P n-1(黒丸)を基準として設定される。図2A,2Bでは、直前の周期において、検出位置Q n-1に最も近い走行道路(道路R1)上の位置を補正位置P n-1として特定されていることとする。検索範囲Aは、直前の周期にて特定された走行道路(道路R1)のうち、車両が直前の周期にて特定された補正位置P n-1から範囲長Lだけ当該走行道路(道路R1)上を後退した場合に到達する位置から、当該補正位置P n-1から車両が範囲長Lだけ当該走行道路(道路R1)上を前進した場合に到達する位置までの区間に沿った所定幅W(20m)の範囲である。なお、図2Aにおいて範囲長Lは30mと設定され,図2Bにおいて範囲長Lは10mとされている。
【0035】
走行道路検索部21cの機能により制御部20は、検索範囲Aに少なくとも一部が属する走行道路の候補の道路の形状を取得すると、当該候補の道路のうち検出位置軌跡Sの形状との類似度が最も高い形状を有する道路を走行道路として検索する。例えば、検出位置軌跡Sの形状と道路の形状の類似度は、方向や位置の相違が総合的に反映されたコストに基づいて検索されてもよい。
【0036】
図2Aの場合、もとの走行道路である道路R1以外に、車両の走行方向前方に存在する交差点にて当該道路R1に接続する道路R2〜R4の一部が検索範囲A内に存在しており、道路R1〜R4が走行道路の候補とされ得る。ただし、本実施形態においては、後述する検索候補設定処理(検索候補抽出処理)によって検出位置軌跡Sが示す車両の現在の方位に基づく候補の道路の絞り込みが行われており、検出位置軌跡Sが示す車両の現在の方位と所定角度以上異なる方向の道路は走行道路の候補から除外されている。図2Aの場合、検出位置軌跡Sが示す車両の現在の方位と垂直な道路R1は候補から除外され、車両の現在の方位とほぼ平行な道路R2,R3のみが走行道路の候補として絞り込まれている。そして、走行道路検索部21cの機能により制御部20は、絞り込まれた候補の道路R2,R3のうち検出位置軌跡Sの形状との類似度が最も高い、すなわち検出位置軌跡Sの形状と同様に左側へと向かう形状を示す道路R2を走行道路として検索する。道路R2を走行道路として検索すると、補正位置特定部21dの機能により制御部20は、検出位置軌跡Sに基づいて走行道路(道路R2)上において検出位置Qnに最も近い位置を車両の補正位置Pnとして特定する。
【0037】
一方、図2Bの場合、図2Aの場合よりも検索範囲Aが小さくなっており、道路R2〜R4が検索範囲A外となっている。すなわち、もとの走行道路である道路R1以外の道路が検索範囲A内に存在しておらず、さらに道路R1も検出位置軌跡Sの方位に基づく候補の道路の絞り込みにより候補から除外されるため、走行道路の候補は1つも存在せず、走行道路検索部21cの機能により制御部20は、走行道路が検索できなったとする。この場合、走行道路検索部21cの機能により制御部20は、車両が地図情報30aに登録された道路外を走行していると特定する。以上説明したように、検索範囲Aの大きさを規定する範囲長Lを短く設定することにより、走行道路の候補の数を減少させることができるため、車両が地図情報30aに登録された道路外を走行していると特定されるまでの所要期間を短縮できる。すなわち、図2Aにおいて、車両がさらに道路外を走行して検出位置Q n+1(白三角)まで検出位置軌跡Sが延長され、当該延長した検出位置軌跡Sが示す現在の車両の方位と、道路R2の方向とが所定角度以上相違するまでは、道路R2が走行道路として検索され、道路R2上の位置が補正位置と特定され続けることとなる。これに対して、図2Bのように検索範囲Aを小さく設定しておけば、検出位置軌跡Sが示す現在の車両の方位と、道路R2の方向とが所定角度以上相違するのを待つまでもなく、早期に地図情報30aに登録された道路外の位置を車両が走行していると特定できる。従って、例えば地図情報30aの作成後に建造されたことにより地図情報30aにて地物データとして登録されていない駐車場や、地図情報30aにて進入するためのノードが登録されていない道路に進入するために道路R2とは異なる位置にて左折したにも拘わらず、道路R2上の位置が補正位置Pnとされることが防止でき、ユーザI/F部40によって地図上に表示された補正位置Pnを視認したユーザに違和感を与えることが防止できる。
【0038】
(2−2)検索候補設定処理:
図3Aは、検索候補設定処理の流れを示すフローチャートである。ステップS100において検索範囲設定部21eの機能により制御部20は、車両が所定の単位距離を走行したか否かを判定する。なお、検索候補設定処理は車両が単位距離を走行する周期ごとに繰り返して実行するループ処理である。検索候補設定処理を実行する周期に対応する単位距離は、マップマッチング処理を実行する周期に対応する単位距離(1.2m)と同じであってもよいが、マップマッチング処理の単位距離よりも長くてもよい。車両が単位距離走行すると、ステップS110において制御部20は、並行して実行されているマップマッチング処理において走行道路検索部21cの機能により走行道路が検索できているか否かを判定する。走行道路が検索できていない場合には、制御部20は、次に単位距離走行するまで待機する。走行道路が検索できている場合、制御部20は、ステップS200の実行可否判定処理においてステップS300の形状類否判定処理を実行するか否かを判定する。
【0039】
(2−2−1)実行可否判定処理:
図3Bは、実行可否判定処理のフローチャートである。ステップS210において制御部20は、検出位置軌跡Sのうち現在の検出位置Qnから所定距離(186m)だけ遡った検出位置Q n-155までの軌跡を注目検出位置軌跡とし、この注目検出位置軌跡にN(N=1)個以上の屈曲点が含まれるか否かを判定する。本実施形態では、単位距離(1.2m)ごとに検出位置Qが特定されるため、現在の検出位置Qnを含め現在に近い時刻に特定された156個の検出位置Qn〜Q n-155によって注目検出位置軌跡が構成される。本実施形態では、処理負荷の軽減のため、制御部20は、156個の検出位置を5個周期で均等に抽出することにより、6mごと32個の検出位置Qn-5t(tは0〜31の整数)によって構成される注目検出位置軌跡を取得する。制御部20は、互いに連続する周期にて特定された検出位置Q同士を連結した折れ線を形成し、検出位置Qにて互いに接続する折れ線同士のなす角に基づいて車両が所定角度(60度)以上旋回した屈曲点が注目検出位置軌跡にN個以上含まれるか否かを判定する。ステップS210にて、注目検出位置軌跡にN個以上の屈曲点が含まれないと判定した場合、ステップS260において制御部20は、形状類否判定処理を実行しないこととする。すなわち、注目検出位置軌跡がほぼ直線であり、注目検出位置軌跡と注目補正位置軌跡との類似度を判定するのに足りる形状的特徴が注目検出位置軌跡に存在しないとして、形状類否判定処理を実行しないこととする。
【0040】
一方、ステップS210にて注目検出位置軌跡にN個以上の屈曲点が含まれると判定した場合、ステップS220において制御部20は、補正位置軌跡の全長が注目検出位置軌跡の長さである所定距離(186m)以上であるか否かを判定する。上述のように、補正位置Pもほぼ単位距離(1.2m)周期で特定されるため、現在までに連続して156個の補正位置Pn〜P n-155(図2A,2Bに示す黒丸)がマップマッチング処理において特定されているか否かを判定すればよい。ステップS220にて、補正位置軌跡の全長が所定距離以上でないと判定した場合、制御部20は、注目検出位置軌跡と比較し得る程度の長さの補正位置軌跡が取得できないとして、ステップS260において形状類否判定処理を実行しないこととする。
【0041】
一方、ステップS220にて、補正位置軌跡の全長が所定距離以上であると判定した場合、ステップS230において制御部20は、補正位置Pまたは検出位置Qに基づいて車両が地図情報30aの施設データに登録された施設(駐車場,サービスエリア,パーキングエリア等)である登録施設に進入しているか否かを判定する。ステップS230にて車両が地図情報30aに登録された登録施設に進入していると判定した場合には、制御部20は、マップマッチング処理のために検索範囲Aを調整する必要性がないとして、ステップS260において形状類否判定処理を実行しないこととする。本実施形態において、車両が地図情報30aに登録された登録施設に進入している場合には、マップマッチング処理の代わりに登録施設の属性に固有の処理を実行するため、マップマッチング処理の検索範囲Aを設定する実益がない。
【0042】
一方、ステップS230にて車両が地図情報30aに登録された施設に入庫していると判定しなかった場合には、ステップS240において制御部20は、補正位置Pまたは検出位置Qに基づいて車両が地図情報30aに登録された市街地地域を走行しているか否かを判定する。ステップS240にて車両が地図情報30aに登録された市街地地域を走行していると判定した場合には、制御部20は、マップマッチング処理のための検索範囲Aを小さくすることが望ましくないとして、ステップS260において形状類否判定処理を実行しないこととする。市街地地域以外の山岳道路等は道路の形状が複雑であり、検出位置軌跡Sの信頼度も低下しがちとなるため、検索範囲Aを小さくしてマップマッチング処理における走行道路の候補を減少させることは望ましくないからである。ステップS240にて車両が地図情報30aに登録された市街地地域を走行していると判定されなかった場合、ステップS250において制御部20は、形状類否判定処理を実行することとする。以上のようにして、形状類否判定処理を実行することとした場合、制御部20は図3AのステップS300において形状類否判定処理を実行する。
【0043】
(2−2−2)形状類否判定処理:
図4Aは、形状類否判定処理のフローチャートである。図4Aに示すように形状類否判定処理において、制御部20は、まずステップS310の比較区間抽出処理を実行する。
(2−2−2−1)比較区間抽出処理:
図4Bは、比較区間抽出処理のフローチャートである。ステップS311において制御部20は、注目補正位置軌跡を取得する。注目補正位置軌跡も注目検出位置軌跡と同様の手法により、現在の補正位置Pnから所定距離(186m)だけ遡った補正位置P n-155までの軌跡を注目補正位置軌跡として取得する。本実施形態では、処理負荷の軽減のため、制御部20は、156個の補正位置Pを5個周期で均等に抽出することにより、6mごと32個の補正位置Pn-5tによって構成される注目補正位置軌跡を取得する。
【0044】
ステップS312において制御部20は、注目補正位置軌跡を構成する補正位置Pの一つを処理対象として選択する。本実施形態では、現在の補正位置Pnから過去に向かって順に補正位置Pを処理対象として選択することとする。現在処理対象として選択された補正位置Pを補正位置Pa(a=n−5t)と表記する。ステップS313において制御部20は、図4Cの模式図に示すように1つ前に選択した補正位置Pa+5から現在選択している補正位置Paへ向かう方位(破線矢印)と、2つ前に選択した補正位置P a+10から1つ前に選択した補正位置P a+5へ向かう方位(一点鎖線矢印)との方位差αを算出する。そして、ステップS314において、制御部20は前記方位差αが所定角度(60度)以上であるか否かを判定する。すなわち、制御部20は、1つ前に選択した補正位置P a+5にて車両が60度以上旋回しているか否かを判定する。
【0045】
ステップS314にて方位差αが所定角度よりも小さいと判定された場合、制御部20は、ステップS312に戻り、次(1つ過去)の補正位置P a-5を選択する。一方、ステップS314にて方位差αが所定角度以上であると判定された場合、ステップS315において制御部20は、1つ前に選択した補正位置P a+5を屈曲点と特定し、3つ前に選択した補正位置P a+15を既存の比較区間の終点と特定し、1つ後に選択する補正位置P a-5を新たな比較区間の始点と特定する。なお、初期において現在の補正位置Pnを選択した場合には、ステップS312〜S314をスキップし、現在の補正位置Pnを比較区間の始点とする。
【0046】
以上の処理を繰り返して実行することにより、注目補正位置軌跡の形状が所定角度以上屈曲する屈曲点にて注目補正位置軌跡を分割した比較区間を形成することができる。また、屈曲点の前後所定距離(1.2×5×2=12m)以内の区間は比較区間から除かれることとなる。なお、比較区間は車両が60度以上旋回することなく走行した区間に対応するため、比較区間は直線に近い形状となる。次のステップS316において制御部20は、ステップS315にて終点が特定された比較区間を確定する。ステップS317において制御部20は、ステップS316にて確定した比較区間の累積個数が所定のM(M=3>N+1)個であったか否かを判定する。ステップS316にて確定した比較区間の累積個数がM個であった場合、制御部20は、比較区間抽出処理を終了させる。
【0047】
一方、ステップS316にて確定した比較区間の累積個数がM個未満であったとステップS317において判定した場合、制御部20は、ステップS318において注目補正位置軌跡を構成する補正位置Pのうち選択順が最後の補正位置P n-155を選択したか否かを判定する。選択順が最後の補正位置P n-155を選択していない場合、制御部20は、ステップS312に戻り、次(1つ過去)の補正位置Pを選択する。以上の処理を繰り返して実行することにより、確定した比較区間がM個抽出できた場合を除き、最後の補正位置P n-155を選択するまで注目補正位置軌跡から比較区間を抽出する処理を繰り返していくことができる。なお、最後の補正位置P n-155を選択した場合、ステップS315において制御部20は、ステップS312〜S314の結果に拘わらず、最後の補正位置P n-155を比較区間の終点とし、ステップS316にて当該比較区間を確定する。一方、制御部20は、ステップS316にて注目検出位置軌跡の形状との比較に使用するのに十分な数(M個)の比較区間が確定できたと判定した段階で、選択順が最後(最も過去)の補正位置P n-155を処理対象として選択するまで処理を繰り返すことなく、比較区間抽出処理を終了させる。これにより、処理負荷が軽減できる。以上のようにして、比較区間抽出処理が終了すると、制御部20は、図4Aの形状類否判定処理に戻り、ステップS320を実行する。
【0048】
図4AのステップS320において制御部20は、比較区間が(N+1)個以上確定できたか否かを判定する。本実施形態においてN=1であるため、制御部20は、比較区間が2個以上確定できたか否かを判定する。比較区間が(N+1)個以上確定できなかった場合、すなわち屈曲点がN個以上特定できなかった場合には、ステップS330の形状比較処理を実行しないこととする。つまり、注目検出位置軌跡の比較に使用するのに十分な数の比較区間が抽出できなかったとして、形状比較処理を実行しないこととする。一方、ステップS320において比較区間が(N+1)個以上確定できたと判定された場合、制御部20は、ステップS330にて形状比較処理実行する。
【0049】
(2−2−2−2)形状比較処理:
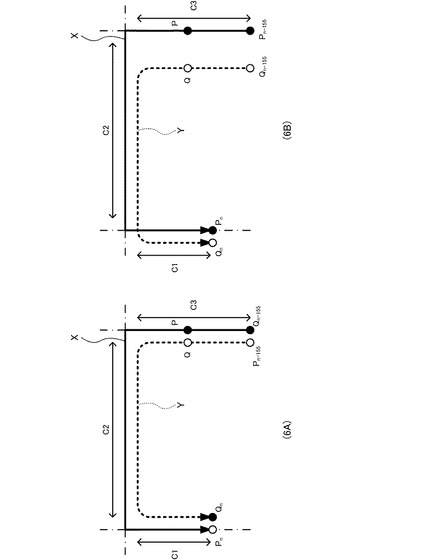
図5は、形状比較処理のフローチャートである。まずステップS331において制御部20は、処理対象の比較区間を選択する。ここでは現在に近い順に比較区間を選択することとする。図6A,6Bは、注目補正位置軌跡X(実線)と注目検出位置軌跡Y(破線)を示す図である。ここで、形状比較処理は、注目補正位置軌跡Xと構成する各補正位置Pについて注目検出位置軌跡Yとの最短距離である最短位置間距離を算出し、各補正位置Pについての最短位置間距離のうち最長のものを軌跡間距離として算出する処理であり、処理対象の補正位置Pと検出位置Qとを順次切り替えるループ処理によって構成される。図6A,6Bでは、それぞれ3個の比較区間C1〜C3からなる注目補正位置軌跡Xが示されている。なお、注目補正位置軌跡Xは地図情報30aに登録された道路の形状(一点鎖線)に沿った形状となる。ステップS332において制御部20は、処理対象として選択した比較区間を構成する補正位置Pのうち1つを処理対象の補正位置Pとして選択する。ここでは、比較区間を構成する補正位置Pのうち現在に近いものから順に選択することとする。ステップS333において制御部20は、注目検出位置軌跡Yを構成する検出位置Qの1つを処理対象の検出位置Qとして選択する。ここでは現在に近い順に処理対象の検出位置Qを選択することとする。
【0050】
ステップS334において制御部20は、処理対象の検出位置Qにおいて注目検出位置軌跡Yが示す車両の方位と、処理対象の補正位置Pにおいて注目補正位置軌跡Xが示す車両の方位との方位差が所定角度(60度)以上であるか否かを判定する。処理対象の検出位置Qにおいて注目検出位置軌跡Yが示す車両の方位と、処理対象の補正位置Pにおいて注目補正位置軌跡Xが示す車両の方位との方位差が所定角度よりも小さいと判定された場合、ステップS335において制御部20は、処理対象の補正位置Pと、処理対象の検出位置Qとの距離である位置間距離を算出する。ステップS336において制御部20は、記録媒体30に保持された最短位置間距離よりもステップS335にて算出した位置間距離の方が短い場合に限り、ステップS335にて算出した位置間距離によって記録媒体30に記録された最短位置間距離を上書きする。一方、処理対象の検出位置において注目検出位置軌跡Yが示す車両の方位と、処理対象の補正位置において注目補正位置軌跡Xが示す車両の方位との方位差が所定角度以上であるとステップS334にて判定された場合、制御部20は、ステップS335〜S336をスキップし、ステップS337を実行する。
【0051】
ステップS337において制御部20は、注目検出位置軌跡Yを構成する検出位置Qのうち選択順が最後(最も過去)の検出位置Q n-155を選択したか否かを判定し、選択順が最後の検出位置Q n-155を選択していない場合には、ステップS333において次の検出位置Qを処理対象として選択する。以上の処理(ステップS333〜S337)を繰り返して実行することにより、処理対象の比較区間C1〜C3を構成する処理対象の補正位置Pと、注目検出位置軌跡Yを構成する各検出位置Qとの位置間距離を順次算出し、これらの位置間距離のうち最も短いものを最短位置間距離として記録媒体30に保持することができる。ただし、処理対象の検出位置Qにおいて注目検出位置軌跡Yが示す車両の方位と、処理対象の補正位置Pにおいて注目補正位置軌跡Xが示す車両の方位との方位差が所定角度(60度)以上の場合には位置間距離を算出しないため、注目検出位置軌跡Yのうち比較区間C1〜C3と平行に近い区間に属する検出位置Qと処理対象の補正位置Pとの最短位置間距離のみが記録媒体30に保持されることとなる。すなわち、補正位置Pにおける注目補正位置軌跡Xの方位と平行に近い注目検出位置軌跡Yの区間内の検出位置Qであって補正位置Pとの位置間距離が最短となる検出位置Qが探索され、当該検出位置Qと補正位置Pとの距離である最短位置間距離が記録媒体30に保持されることとなる。
【0052】
一方、注目検出位置軌跡Yを構成する検出位置Qのうち選択順が最後(最も過去)の検出位置Q n-155を選択したとステップS337にて判定した場合、ステップS338において制御部20は、記録媒体30に保持されている軌跡間距離よりも記録媒体30に保持されている最短位置間距離の方が長い場合に限り、最短位置間距離で軌跡間距離を上書きする。また、ステップS338において制御部20は、記録媒体30に保持されていた最短位置間距離を消去する。ステップS339において制御部20は、処理対象の比較区間C1〜C3を構成する補正位置のうち選択順が最後(最も過去)の補正位置を選択したか否かを判定する。処理対象の比較区間C1〜C3を構成する補正位置Pのうち選択順が最後の補正位置Pを処理対象として選択していないとステップS339にて判定した場合、制御部20は、ステップS332に戻り、処理対象の比較区間C1〜C3を構成する次の補正位置Pを処理対象として選択する。
【0053】
処理対象の比較区間C1〜C3を構成する補正位置Pのうち選択順が最後の補正位置Pを処理対象として選択したとステップS339にて判定した場合、ステップS340において制御部20は、選択順が最後(最も過去)の比較区間C3を処理対象として選択したか否かを判定する。選択順が最後の比較区間C3を処理対象として選択していないとステップS340にて判定した場合、制御部20は、ステップS331に戻り、次の比較区間C2〜C3を処理対処として選択する。以上の処理(ステップS331〜S340)を繰り返して実行することにより、各比較区間C1〜C3に属する各補正位置Pを処理対象として順次選択していき、各補正位置Pと注目検出位置軌跡Yとの最短距離である最短位置間距離を順次算出していくことができる。さらに、各補正位置Pについての最短位置間距離のうち最長となるものを、最終的に軌跡間距離として記録媒体30に保持することができる。すなわち、注目補正位置軌跡Xと注目検出位置軌跡Yとが互いに平行に近くなる区間における注目補正位置軌跡Xと注目検出位置軌跡Yとの距離の最大値を軌跡間距離として特定することができる。ステップS331〜332においては、屈曲点から所定距離(12m)以上離れた比較区間に属する補正位置Pのみが処理対象として選択されるため、道路の形状と車両の実際の軌跡とが大きく乖離しがちな交差点等の軌跡に基づいて軌跡間距離が特定されることが防止できる。
【0054】
一方、選択順が最後の比較区間C1〜C3を処理対象として選択したとステップS340にて判定した場合、ステップS341において制御部20は、記録媒体30に保持されている軌跡間距離が所定の基準距離(10m)よりも短いか否かを判定する。すなわち、制御部20は、注目補正位置軌跡Xと注目検出位置軌跡Yとが互いに平行に近くなる区間における注目補正位置軌跡Xと注目検出位置軌跡Yとの距離の最大値である軌跡間距離が基準距離よりも短いか否かを判定する。そして、軌跡間距離が基準距離よりも短いと判定した場合、ステップS342において制御部20は、注目補正位置軌跡Xと注目検出位置軌跡Yとの類似度が所定の基準類似度よりも高いとする。本実施形態において、注目補正位置軌跡Xと注目検出位置軌跡Yとの類似度が所定の基準類似度よりも高いことは、注目補正位置軌跡Xの信頼度が所定の基準信頼度よりも高いことと同義である。反対に、軌跡間距離が基準距離以上であると判定した場合、ステップS343において制御部20は、注目補正位置軌跡Xと注目検出位置軌跡Yとの類似度が所定の基準類似度以下であると判定する。本実施形態において、注目補正位置軌跡Xと注目検出位置軌跡Yとの類似度が所定の基準類似度以下であることは、注目補正位置軌跡Xの信頼度が基準信頼度以下であることと同義である。
【0055】
図6Bでは注目検出位置軌跡Yが注目補正位置軌跡Xに対して紙面左側にシフトしており、軌跡間距離Dが基準距離以上となっている。図6Bのように、軌跡間距離Dが基準距離以上となる場合、注目検出位置軌跡Yが道路の形状に対応する注目補正位置軌跡Xから大きく乖離した形状となり、注目検出位置軌跡Yが車両の現実の走行軌跡を表している可能性が低く、注目検出位置軌跡Yの信頼度が低いと判断できる。以上により形状類否判定処理が完了すると、制御部20は、図3Aの検索候補設定処理に戻り、ステップS400の検索範囲設定処理を実行する。
【0056】
(2−2−3)検索範囲設定処理:
図7Aは、検索範囲設定処理のフローチャートである。ステップS410において制御部20は、形状類否判定処理を実行したか否かを判定する。形状類否判定処理を実行しなかったと判定した場合には、ステップS450において制御部20は、検索範囲Aの範囲長Lを30mと設定する。一方、形状類否判定処理を実行したとステップS410にて判定した場合には、ステップS420において制御部20は、形状比較処理を実行したか否かを判定する。形状比較処理を実行しなかったと判定した場合には、ステップS450において制御部20は、検索範囲Aの範囲長Lを30mと設定する。すなわち、形状類否判定処理と形状比較処理とを実行しなかった場合、検出位置軌跡Sの信頼度が基準信頼度以下である可能性があるため、検索範囲Aの範囲長Lを30mと設定する。
【0057】
一方、形状比較処理を実行したとステップS420にて判定した場合には、ステップS430において制御部20は、注目補正位置軌跡Xと注目検出位置軌跡Yとの類似度が基準類似度よりも高いと判定されたか否か、すなわち注目検出位置軌跡Yの信頼度が基準信頼度よりも高いか否を判定する。注目補正位置軌跡Xと注目検出位置軌跡Yとの類似度が基準類似度よりも高いと判定されなかった場合、ステップS450において制御部20は、検索範囲Aの範囲長Lを30mと設定する。注目補正位置軌跡Xと注目検出位置軌跡Yとの類似度が基準類似度よりも高いと判定された場合、ステップS440において制御部20は、検索範囲Aの範囲長Lを10mと設定する。以上のようにして検索範囲Aの範囲長Lを設定すると検索範囲設定処理が終了し、制御部20は、図3Aの検索候補設定処理に戻り、ステップS500の検索候補抽出処理を実行する。
【0058】
(2−2−4)検索候補抽出処理:
図7Bは、検索候補抽出処理のフローチャートである。ステップS510において地図情報取得部21bの機能により制御部20は、図7AのステップS440,S450にて設定された検索範囲Aに少なくとも一部が属する道路を地図情報30aから走行道路の候補として抽出する。図2Aでは道路R1〜R4が走行道路の候補として抽出され、図2Bでは道路R1のみが走行道路の候補として抽出される。ステップS520において地図情報取得部21bの機能により制御部20は、検出位置軌跡Sが示す車両の方位に基づいて、走行道路の候補の絞り込みを行う。すなわち、制御部20は、検出位置軌跡Sが示す車両の現在の方位との平行度が所定基準以下となる道路を走行道路の候補から除外することにより、走行道路の候補を絞り込む。図2Aでは検出位置軌跡Sが示す車両の現在の方位とほぼ平行な道路R2,R3のみが走行道路の候補として絞り込まれる。一方、図2Bでは唯一の候補である道路R1と検出位置軌跡Sが示す車両の現在の方位とがほぼ直角となっているため、走行道路の候補が存在しないとされる。以上により検索候補抽出処理(検索範囲設定処理)が終了し、制御部20は、図3Aの検索候補設定処理のステップS100に戻り、次に車両が単位距離を走行するまで待機する。また、検索範囲設定処理と並行して実行されるマップマッチング処理においては検索候補抽出処理にて絞り込まれた走行道路の候補のなかから検出位置軌跡Sの形状と最も類似する形状を有する道路が走行道路として特定されることとなる。以上説明した検索候補設定処理を周期的に実行することにより、刻々と変化する注目検出位置軌跡Yの信頼度に応じた検索範囲Aを設定していくことができる。
【0059】
(3)他の実施形態:
検出位置軌跡取得部21aの機能により制御部20は、車両に備えられた検出器の出力信号に基づく検出位置Qの時系列の軌跡である検出位置軌跡Sを取得すればよく、検出器としてのGPS受信器43のみの出力信号に基づく検出位置Qの軌跡である検出位置軌跡Sを取得してもよい。また、検索範囲Aは補正位置Pを基準として定められる範囲であり、補正位置Pを重心等とした所定図形に対応する範囲であってもよい。また、検索範囲Aを補正位置Pに到達するまでに走行する必要がある道路区間に対応するリンクの数に基づいて定めてもよい。
【0060】
検索範囲設定部21eの機能により制御部20は、検索範囲Aを検出位置軌跡Sの信頼度に応じて2段階以上に段階的に小さくしてもよいし、連続的に小さくしてもよい。検索範囲設定部21eの機能により制御部20は、検出位置軌跡Sを得るための検出器の動作状況に基づいて検出位置軌跡Sの信頼度を特定してもよい。すなわち、必ずしも検出位置軌跡Sの形状と補正位置軌跡の形状との比較により検出位置軌跡Sの信頼度を評価しなくてもよい。例えば、検出位置軌跡Sの形状と地図情報30aに登録された道路の形状とを比較して検出位置軌跡Sの信頼度を評価してもよい。また、検索範囲設定部21eの機能により制御部20は、補正位置軌跡の形状と検出位置軌跡Sの形状とから特徴点(屈曲点等)を抽出し、当該特徴点の比較により補正位置軌跡の形状と検出位置軌跡Sの形状との類似度を特定してもよい。
【0061】
さらに、前記実施形態において、検索範囲設定部21eの機能により制御部20は、検出位置軌跡Sのうち注目期間に対応する部分である注目検出位置軌跡の形状と、補正位置軌跡のうち注目期間に対応する部分である注目補正位置軌跡の形状との類似度を特定したが、例えば電源がオンとなってから現在までに取得された検出位置軌跡Sの全形状と補正位置軌跡の全形状との類似度に基づいて検出位置軌跡Sの信頼度を評価してもよい。なお、注目期間は、期間の長さによって定められてもよい。
【0062】
また、前記実施形態において、検索範囲設定部21eの機能により制御部20は、注目検出位置軌跡の形状においてN個以上の屈曲点が含まれない場合に、注目検出位置軌跡の形状と注目補正位置軌跡の形状との類似度の判定を行わないようにしたが、屈曲点が含まれるか否かに拘わらず注目検出位置軌跡の形状と注目補正位置軌跡の形状との類似度の判定を行ってもよい。なお、屈曲点は軌跡の形状の曲率半径が所定値以下となる点であってもよい。
【符号の説明】
【0063】
10…補正位置特定装置、20…制御部、21…ナビゲーションプログラム、21a…検出位置軌跡取得部、21b…地図情報取得部、21c…走行道路検索部、21d…補正位置特定部、21e…検索範囲設定部、30…記録媒体、30a…地図情報、40…ユーザI/F部、41…車速センサ、42…ジャイロセンサ、43…GPS受信部、A…検索範囲、C1〜C3…比較区間、D…軌跡間距離、L…範囲長、P…補正位置、Q…検出位置、R1〜R4…道路、S…検出位置軌跡、W…所定幅、X…注目補正位置軌跡、Y…注目検出位置軌跡。
【特許請求の範囲】
【請求項1】
道路の位置および形状を示す地図情報を取得する地図情報取得手段と、
車両に備えられた検出器の出力信号に基づく前記車両の位置を示す検出位置の時系列の軌跡を検出位置軌跡として取得する検出位置軌跡取得手段と、
前記車両の位置から所定の検索範囲内に存在し、かつ、前記検出位置軌跡の形状と類似する形状を有する前記道路である走行道路を前記地図情報にて検索する走行道路検索手段と、
前記走行道路が検索できた場合、前記検出位置を前記走行道路上の位置へと補正することにより、前記車両の位置を示す補正位置を特定する補正位置特定手段と、
前記検出位置軌跡の信頼度が所定の基準信頼度よりも高い場合に、前記信頼度が前記基準信頼度以下である場合よりも前記検索範囲を小さくする検索範囲設定手段と、
を備える補正位置特定装置。
【請求項2】
前記検索範囲設定手段は、前記補正位置の時系列の軌跡である補正位置軌跡と、前記検出位置軌跡との類似度が所定の基準類似度よりも高いか否かを判定し、前記類似度が前記基準類似度よりも高い場合に、前記検出位置軌跡の信頼度が前記基準信頼度よりも高いとする、
請求項1に記載の補正位置特定装置。
【請求項3】
前記検索範囲設定手段は、前記補正位置軌跡と前記検出位置軌跡との距離が所定の基準距離よりも短い場合に、前記類似度が前記基準類似度よりも高いと判定する、
請求項2に記載の補正位置特定装置。
【請求項4】
前記検索範囲設定手段は、前記検出位置軌跡のうち現在まで連続する所定の注目期間に対応する部分である注目検出位置軌跡と、前記補正位置軌跡のうち前記注目期間に対応する部分である注目補正位置軌跡との前記類似度が前記基準類似度よりも高いか否かを判定する、
請求項3に記載の補正位置特定装置。
【請求項5】
前記注目検出位置軌跡の形状と前記注目補正位置軌跡の形状との少なくとも一方においてN個以上(自然数)の屈曲点が含まれない場合に、前記類似度が前記基準類似度よりも高いか否かの判定をすることなく前記検索範囲を設定する、
請求項4に記載の補正位置特定装置。
【請求項6】
道路の位置および形状を示す地図情報を取得する地図情報取得工程と、
車両に備えられた検出器の出力信号に基づく前記車両の位置を示す検出位置の時系列の軌跡を検出位置軌跡として取得する検出位置軌跡取得工程と、
前記車両の位置から所定の検索範囲内に存在し、かつ、前記検出位置軌跡の形状と類似する形状を有する前記道路である走行道路を前記地図情報にて検索する走行道路検索工程と、
前記走行道路が検索できた場合、前記検出位置を前記走行道路上の位置へと補正することにより、前記車両の位置を示す補正位置を特定する補正位置特定工程と、
前記検出位置軌跡の信頼度が所定の基準信頼度よりも高い場合に、前記信頼度が前記基準信頼度以下である場合よりも前記検索範囲を小さくする検索範囲設定工程と、
を含む補正位置特定方法。
【請求項7】
道路の位置および形状を示す地図情報を取得する地図情報取得機能と、
車両に備えられた検出器の出力信号に基づく前記車両の位置を示す検出位置の時系列の軌跡を検出位置軌跡として取得する検出位置軌跡取得機能と、
前記車両の位置から所定の検索範囲内に存在し、かつ、前記検出位置軌跡の形状と類似する形状を有する前記道路である走行道路を前記地図情報にて検索する走行道路検索機能と、
前記走行道路が検索できた場合、前記検出位置を前記走行道路上の位置へと補正することにより、前記車両の位置を示す補正位置を特定する補正位置特定機能と、
前記検出位置軌跡の信頼度が所定の基準信頼度よりも高い場合に、前記信頼度が前記基準信頼度以下である場合よりも前記検索範囲を小さくする検索範囲設定機能と、
をコンピュータに実行させる補正位置特定プログラム。
【請求項1】
道路の位置および形状を示す地図情報を取得する地図情報取得手段と、
車両に備えられた検出器の出力信号に基づく前記車両の位置を示す検出位置の時系列の軌跡を検出位置軌跡として取得する検出位置軌跡取得手段と、
前記車両の位置から所定の検索範囲内に存在し、かつ、前記検出位置軌跡の形状と類似する形状を有する前記道路である走行道路を前記地図情報にて検索する走行道路検索手段と、
前記走行道路が検索できた場合、前記検出位置を前記走行道路上の位置へと補正することにより、前記車両の位置を示す補正位置を特定する補正位置特定手段と、
前記検出位置軌跡の信頼度が所定の基準信頼度よりも高い場合に、前記信頼度が前記基準信頼度以下である場合よりも前記検索範囲を小さくする検索範囲設定手段と、
を備える補正位置特定装置。
【請求項2】
前記検索範囲設定手段は、前記補正位置の時系列の軌跡である補正位置軌跡と、前記検出位置軌跡との類似度が所定の基準類似度よりも高いか否かを判定し、前記類似度が前記基準類似度よりも高い場合に、前記検出位置軌跡の信頼度が前記基準信頼度よりも高いとする、
請求項1に記載の補正位置特定装置。
【請求項3】
前記検索範囲設定手段は、前記補正位置軌跡と前記検出位置軌跡との距離が所定の基準距離よりも短い場合に、前記類似度が前記基準類似度よりも高いと判定する、
請求項2に記載の補正位置特定装置。
【請求項4】
前記検索範囲設定手段は、前記検出位置軌跡のうち現在まで連続する所定の注目期間に対応する部分である注目検出位置軌跡と、前記補正位置軌跡のうち前記注目期間に対応する部分である注目補正位置軌跡との前記類似度が前記基準類似度よりも高いか否かを判定する、
請求項3に記載の補正位置特定装置。
【請求項5】
前記注目検出位置軌跡の形状と前記注目補正位置軌跡の形状との少なくとも一方においてN個以上(自然数)の屈曲点が含まれない場合に、前記類似度が前記基準類似度よりも高いか否かの判定をすることなく前記検索範囲を設定する、
請求項4に記載の補正位置特定装置。
【請求項6】
道路の位置および形状を示す地図情報を取得する地図情報取得工程と、
車両に備えられた検出器の出力信号に基づく前記車両の位置を示す検出位置の時系列の軌跡を検出位置軌跡として取得する検出位置軌跡取得工程と、
前記車両の位置から所定の検索範囲内に存在し、かつ、前記検出位置軌跡の形状と類似する形状を有する前記道路である走行道路を前記地図情報にて検索する走行道路検索工程と、
前記走行道路が検索できた場合、前記検出位置を前記走行道路上の位置へと補正することにより、前記車両の位置を示す補正位置を特定する補正位置特定工程と、
前記検出位置軌跡の信頼度が所定の基準信頼度よりも高い場合に、前記信頼度が前記基準信頼度以下である場合よりも前記検索範囲を小さくする検索範囲設定工程と、
を含む補正位置特定方法。
【請求項7】
道路の位置および形状を示す地図情報を取得する地図情報取得機能と、
車両に備えられた検出器の出力信号に基づく前記車両の位置を示す検出位置の時系列の軌跡を検出位置軌跡として取得する検出位置軌跡取得機能と、
前記車両の位置から所定の検索範囲内に存在し、かつ、前記検出位置軌跡の形状と類似する形状を有する前記道路である走行道路を前記地図情報にて検索する走行道路検索機能と、
前記走行道路が検索できた場合、前記検出位置を前記走行道路上の位置へと補正することにより、前記車両の位置を示す補正位置を特定する補正位置特定機能と、
前記検出位置軌跡の信頼度が所定の基準信頼度よりも高い場合に、前記信頼度が前記基準信頼度以下である場合よりも前記検索範囲を小さくする検索範囲設定機能と、
をコンピュータに実行させる補正位置特定プログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−141139(P2012−141139A)
【公開日】平成24年7月26日(2012.7.26)
【国際特許分類】
【出願番号】特願2010−291891(P2010−291891)
【出願日】平成22年12月28日(2010.12.28)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
【公開日】平成24年7月26日(2012.7.26)
【国際特許分類】
【出願日】平成22年12月28日(2010.12.28)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
[ Back to top ]