
複合センサ装置
【課題】被探知性を低下させつつ追尾性能を向上させた、小型かつ低消費電力の複合センサ装置を得る。
【解決手段】パッシブセンサ及びアクティブセンサによる目標の観測値を融合し、これを等速直線運動等の所定の運動モデルに基づき構成された追尾フィルタによりフィルタリング処理を行って、その処理結果と観測値との残差、すなわち、所定の運動モデルと異なる目標の運動を、目標のマニューバとして検出し、マニューバ段階値として定量化する。そして、このマニューバ段階値が変化した場合、及びフィルタリング処理による目標の平滑誤差共分散行列または予測誤差共分散行列から算出される誤差共分散成分が所定のしきい値を越えた場合の少なくとも1つの場合に、継続して観測を行っているパッシブセンサに加え、アクティブセンサによる観測を行うように観測スケジューリングを制御する。
【解決手段】パッシブセンサ及びアクティブセンサによる目標の観測値を融合し、これを等速直線運動等の所定の運動モデルに基づき構成された追尾フィルタによりフィルタリング処理を行って、その処理結果と観測値との残差、すなわち、所定の運動モデルと異なる目標の運動を、目標のマニューバとして検出し、マニューバ段階値として定量化する。そして、このマニューバ段階値が変化した場合、及びフィルタリング処理による目標の平滑誤差共分散行列または予測誤差共分散行列から算出される誤差共分散成分が所定のしきい値を越えた場合の少なくとも1つの場合に、継続して観測を行っているパッシブセンサに加え、アクティブセンサによる観測を行うように観測スケジューリングを制御する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、電磁波または音波を放射することなく目標を観測するパッシブセンサと、電磁波または音波を放射して目標を観測するアクティブセンサとを用いて目標情報を取得する複合センサ装置に関する。
【背景技術】
【0002】
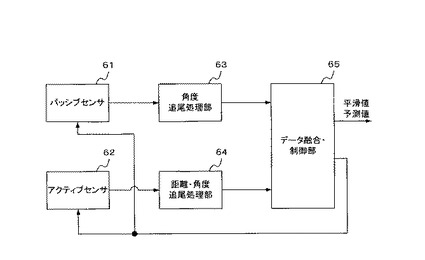
従来より、電磁波または音波の放射を伴わないパッシブセンサと、電磁波または音波を放射するアクティブセンサとを用いて目標を観測する装置が知られている(例えば、特許文献1参照。)。このような、パッシブセンサ及びアクティブセンサによる目標の観測値を用いて目標の追尾を行う、従来の複合センサ装置の構成の一例を図6のブロック図に示す。この図6に例示した従来の複合センサ装置は、電磁波または音波を放射せずに目標の角度を観測するパッシブセンサ61、電磁波または音波を放射して目標の距離及び角度を観測するアクティブセンサ62、パッシブセンサ61からの観測値に基づき追尾フィルタを用いて目標の角度の平滑値、及び予測値を算出する角度追尾処理部63、アクティブセンサ62からの観測値に基づき追尾フィルタを用いて目標の距離、及び角度の平滑値、及び予測値を算出する距離・角度追尾処理部64、ならびに、角度追尾処理部63及び距離・角度追尾処理部64からのそれぞれの処理結果をデータ融合して目標の平滑値、及び予測値を算出するとともに、パッシブセンサ61及びアクティブセンサ62の観測タイミングのスケジューリングを行うデータ融合・制御部65から構成されている。
【0003】
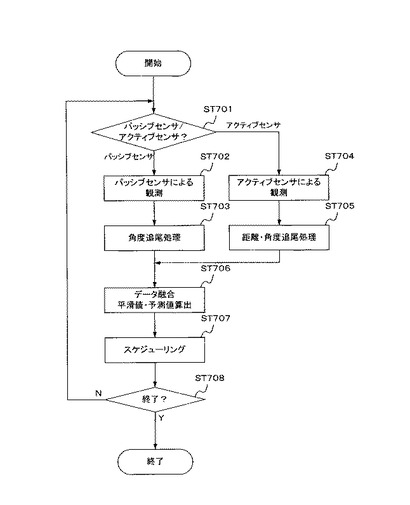
次に、この図6に例示した従来の複合センサ装置の動作について、図7のフローチャートを参照して説明する。まず、データ融合・制御部65によるスケジューリングにより、当該観測タイミングでのセンサの選択制御がなされる(ST701)。ここで、パッシブセンサ61が選択されると、このデータ融合・制御部65からの制御信号に基づきパッシブセンサ61による目標の観測が行われ(ST702)、さらに、その観測値としての測角データに基づいて、角度追尾処理部63において追尾フィルタを用いた処理により目標の角度の平滑値、及び予測値が算出され、データ融合・制御部65に送出される(ST703)。一方、ST701の動作ステップにおいてアクティブセンサ62が選択されると、データ融合・制御部65から制御信号に基づきアクティブセンサ62による目標の観測が行われ(ST704)、さらに、その観測値としての測距・測角データに基づいて、距離・角度追尾処理部64において追尾フィルタを用いた処理により目標の距離及び角度の平滑値、及び予測値が算出され、データ融合・制御部65に送出される(ST705)。
【0004】
次いで、データ融合・制御部65において、各観測タイミングで取得された角度追尾処理部63、及び距離・角度追尾処理部64からの平滑値がデータ融合され、目標の平滑値及び予測値が算出される(ST706)。次いで、以降の観測タイミングのセンサ選択のスケジューリングがなされ、各センサに通知される(ST707)。そして、動作終了が指示されるまで、上記した一連の動作ステップが繰り返される(ST708)。なお、追尾フィルタ等については、例えば、非特許文献1等に詳述されている。
【特許文献1】特開平7−128436号公報(第4ページ、図1)
【非特許文献1】吉田孝監修「改訂レーダ技術」電子情報通信学会、平成8年10月1日、P.264−267
【発明の開示】
【発明が解決しようとする課題】
【0005】
上記したように、パッシブセンサとアクティブセンサとによって構成された複合センサ装置では、センサ観測値を追尾フィルタによってフィルタリング処理し、目標の平滑値や予測値等の目標情報を取得している。ここで、装置の被探知性を低下させるには、パッシブセンサにより目標の角度情報を継続して観測しつつ、目標の角度及び距離情報が観測可能なアクティブセンサの使用を最小限に抑えるよう、それぞれのセンサの観測タイミングがスケジューリングされる。
【0006】
しかしながら、目標が、例えば追尾フィルタの運動モデルと異なるような、急激な変化を伴う運動を行った場合等は、フィルタリング処理後における目標情報中の誤差が増大してしまうことがあり、必ずしも十分な追尾性能を得ることができなかった。また、追尾性能を向上させるためにアクティブセンサを使用する時間間隔を狭くすると、被探知性が悪化するとともに、電磁波等の放射に要する消費電力の増大、そしてそれに伴う装置冷却や電力供給のために装置が大型化するという課題があった。
【0007】
本発明は、上述の事情を考慮してなされたものであり、被探知性を低下させつつ、追尾性能の向上を図るとともに、消費電力を抑えて小型化した複合センサ装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するために、本発明の複合センサ装置は、電磁波または音波の放射を伴わずに目標の角度を観測するパッシブセンサと、電磁波または音波を放射して前記目標までの距離または前記目標までの距離及び角度を観測するアクティブセンサと、所定の運動モデルに基づき構成された追尾フィルタを有し、前記パッシブセンサによる目標の観測結果と前記アクティブセンサによる目標の観測結果とを観測値レベルで融合したデータから前記目標の平滑値及び平滑誤差共分散行列ならびに予測値及び予測誤差共分散行列を含む目標情報を算出する追尾手段と、この追尾手段での目標情報の算出時における観測値との残差及び残差共分散行列に基づき前記所定の運動モデルと異なる前記目標の運動をこの目標のマニューバとして検出するとともに、この検出したマニューバの状態をあらかじめ設定された複数のしきい値に対応付けた複数のマニューバ段階値に区分するマニューバ検出手段と、このマニューバ検出手段からのマニューバ段階値に基づき前記追尾フィルタのシステム雑音のレベルを制御するシステム雑音制御手段と、前記パッシブセンサによる前記目標の観測を継続しつつ、前記追尾手段からの平滑誤差共分散行列、予測誤差共分散行列、及び前記マニューバ検出手段からのマニューバ段階値の少なくとも1つに基づいて、前記パッシブセンサ及び前記アクティブセンサの観測タイミングのスケジューリングを行うセンサ制御手段とを有することを特徴とする。
【0009】
また、前記センサ制御手段は、前記パッシブセンサによる前記目標の観測を継続しつつ、前記追尾手段からの前記目標の平滑誤差共分散行列または予測誤差共分散行列から算出される誤差共分散成分が所定のしきい値を超えた場合、及び前記マニューバ検出手段からの前記目標のマニューバ段階値が変化した場合の少なくとも1つの場合に、前記アクティブセンサにより前記目標の観測を行うようスケジューリングすることを特徴とする。
【0010】
また、前記センサ制御手段は、前記パッシブセンサによる前記目標の観測を継続しつつ、前記マニューバ検出手段からの前記目標のマニューバ段階値に対応付けてあらかじめ設定された前記アクティブセンサの観測時間間隔に基づいて、前記アクティブセンサにより前記目標の観測を行うようスケジューリングすることを特徴とする。
【0011】
さらに、前記センサ制御手段は、前記追尾手段からの目標情報に基づいて前記アクティブセンサの電磁波または音波の放射方向を制御するとともに、前記アクティブセンサは、この制御に基づき指定された方向に電磁波または音波を放射することを特徴とする。
【発明の効果】
【0012】
本発明によれば、被探知性を低下させつつ追尾性能を向上させた、小型かつ低消費電力の複合センサ装置を得ることができる。
【発明を実施するための最良の形態】
【0013】
以下に、本発明に係る複合センサ装置を実施するための最良の形態について、図1乃至図5を参照して説明する。
【実施例1】
【0014】
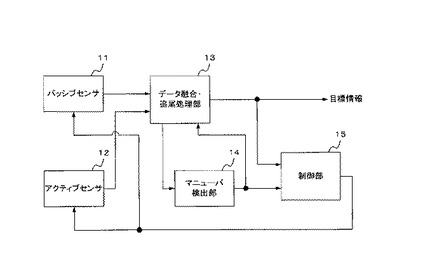
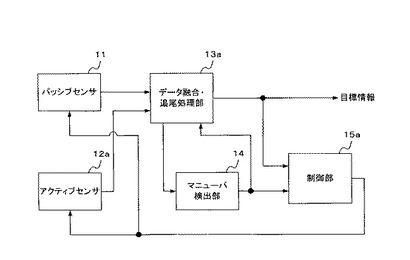
図1は、本発明に係る複合センサ装置の第1の実施例の構成を示すブロック図である。この図1に例示した複合センサ装置は、パッシブセンサ11、アクティブセンサ12、データ融合・追尾処理部13、マニューバ検出部14、及び制御部15から構成されている。パッシブセンサ11は、例えば撮像センサや電波受信センサ等を有し、電磁波または音波の放射を伴わずに、後述する制御部15からの制御による観測タイミングで目標の角度を観測し、その結果をデータ融合・追尾処理部13に送出する。アクティブセンサ12は、例えばレーザセンサやレーダセンサ等を有し、制御部15からの制御による観測タイミングで電磁波または音波を放射して目標までの距離及び角度を観測し、その結果をデータ融合・追尾処理部13に送出する。
【0015】
データ融合・追尾処理部13は、所定の運動モデルに基づき構成された追尾フィルタを有しており、パッシブセンサ11及びアクティブセンサ12からの観測結果を融合したデータを、この追尾フィルタを用いてフィルタリング処理し、目標の平滑値及び平滑誤差共分散行列、ならびに目標の予測値及び予測誤差共分散行列を含む目標情報を算出する。本実施例においては、追尾フィルタを、例えば線形カルマンフィルタとし、その運動モデルは、例えば等速直線運動としている。また、後述するマニューバ検出部14からのマニューバ段階値に基づいて、上記した自身の追尾フィルタ内に目標運動の不確実さ(誤差)成分として取り込んであるシステム雑音のレベルが目標の運動モデルに適合するよう制御する。
【0016】
マニューバ検出部14は、データ融合・追尾処理部13において算出した目標情報と観測値との残差及び残差共分散行列に基づいて、上記した追尾フィルタの運動モデルと異なる目標の運動を検出し、これをその目標のマニューバとして、あらかじめ設定された複数のしきい値に対応付けたマニューバ段階値に区分して出力する。本実施例においては、追尾フィルタの運動モデルを等速直線運動としているので、検出される目標のマニューバとしては、例えば目標を航空機とすると、運動モデルと異なる動き、すなわち、上昇、下降、及び旋回といった運動について、その緩急に応じて区分されてマニューバ段階値として出力される。
【0017】
制御部15は、データ融合・追尾処理部13からの目標情報、及びマニューバ検出部14からのマニューバ段階値の少なくとも1つに基づいて、パッシブセンサ11及びアクティブセンサ12の観測タイミングのスケジューリングを行う。本実施例では、装置の被探知性を低下させるように、パッシブセンサ11による目標の角度の観測を継続しつつ、アクティブセンサ12の使用を最小限に抑えたスケジューリングがなされる。また、本実施例においては、データ融合・追尾処理部13にて算出された目標の平滑誤差共分散行列または予測誤差共分散行列から算出される誤差共分散成分が所定のしきい値を越えた場合、及びマニューバ検出部14からの目標のマニューバ段階値が変化した場合の少なくとも1つの場合に、アクティブセンサ12を動作させるようスケジューリングを行う。すなわち、パッシブセンサ11に対しては、例えば等時間間隔で継続して観測を行うようにスケジューリングする中で、上記した条件の少なくとも1つが発生した場合には、直後の観測タイミングではアクティブセンサ12を用いた観測を行うよう、各センサに対するスケジューリングを行う。
【0018】
次に、前出の図1、ならびに図2のフローチャートを参照して、上述のように構成された本実施例の複合センサ装置の動作について説明する。図2は、図1に例示した本発明に係る複合センサ装置の第1の実施例の動作を説明するためのフローチャートである。
【0019】
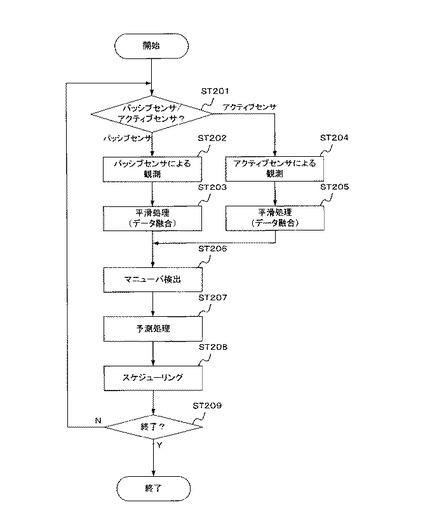
はじめに、図2を参照して、全体の動作の流れを説明する。まず、制御部15によるスケジューリングにより、当該観測タイミングでのセンサの選択がなされる(ST201)。ここで、パッシブセンサ11が選択されると、制御部15からの制御に従ってパッシブセンサ11による目標の角度の観測が行われ、その観測結果がデータ融合・追尾処理部13に送出される(ST202)。データ融合・追尾処理部13では、この観測結果に基づいて追尾フィルタによるフィルタリング処理が実行され、目標の平滑値及び平滑誤差共分散行列が算出される(ST203)。一方、ST201の動作ステップにおいてアクティブセンサ12が選択されると、制御部15からの制御に従ってアクティブセンサ12による目標の距離及び角度の観測が行われ、その観測結果がデータ融合・追尾処理部13に送出される(ST204)。データ融合・追尾処理部13では、これら観測結果に基づいてフィルタリング処理により目標の平滑値及び平滑誤差共分散行列が算出される(ST205)。
【0020】
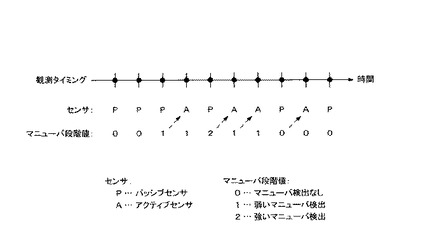
次いで、データ融合・追尾処理部13で算出されたこれら目標情報と観測値との残差及び残差共分散行列に基づいて、マニューバ検出部14では、目標のマニューバを検出する。そして、その検出結果は、マニューバの程度に応じて複数の段階に区分されたマニューバ段階値として出力される(ST206)。次いで、このマニューバ段階値に基づいて、データ融合・追尾処理部13では、内部の追尾フィルタに対して、そのシステム雑音レベルがより目標の運動モデルに適合するように制御を行うとともに、フィルタリング処理が継続されて、目標の予測値及び予測誤差共分散行列が算出される(ST207)。次いで、制御部15では、このようにしてデータ融合・追尾処理部13にて算出された目標の平滑誤差共分散行列または予測誤差共分散行列から算出される誤差共分散成分が所定のしきい値を越えた場合、及びマニューバ検出部14からの目標のマニューバ段階値が変化した場合の、少なくとも1つの場合にアクティブセンサ12を動作させるよう、以降の観測タイミングにおける各センサのスケジューリングがなされる。図3にその一例をモデル化して示す。図3の事例では、マニューバ検出部14からのマニューバ段階値が変化した場合にアクティブセンサ12を動作させるようスケジューリングしたものであり、等時間間隔に設定された観測タイミングにおいて、パッシブセンサ11による観測を継続しつつ、マニューバ検出部14からのマニューバ段階値が変化した場合に、その直後の観測タイミングでは、アクティブセンサ12を動作させ観測を行っている。なお、誤差共分散成分がしきい値を越えた場合もこの事例と同様に、その直後の観測タイミングでアクティブセンサ12を動作させるよう制御される(ST208)。以降、動作終了まで上述した一連の動作ステップが繰り返される(ST209)。
【0021】
次に、上記した各動作ステップにおける処理内容について詳細に説明する。まず、ST203及びST205のステップでのフィルタリング処理に際して、目標の角度を観測するパッシブセンサ11、ならびに距離及び角度を観測するアクティブセンサ12からの観測結果を観測値ベースでデータ融合する場合の処理内容について説明する。
【0022】
目標の運動モデルを、以下の式(1)〜式(5)のように定義する。
【数1】

【数2】
【数3】
【数4】
【数5】
【0023】
ここで、xkは、観測時刻tkにおける距離rk、方位角θkとその速度成分からなる状態ベクトル、FkとGkは、観測時刻tkから観測時刻tk+1への遷移行列と駆動行列、wkは、観測時刻tkの平均0、共分散行列Qkのシステム雑音ベクトル、σskは、観測時刻tkにおけるシステム雑音の標準偏差である。また、ATは、ベクトル又は行列Aの転置、Inは、n行n列の単位行列、Onは、n行n列の零行列を示す。
【0024】
パッシブセンサ11の観測モデルを、以下の式(6)〜式(8)のように定義する。
【数6】
【数7】
【数8】
【0025】
ここで、ypkは、観測時刻tkのパッシブセンサ11の観測ベクトル、Hpkは、観測時刻tkのパッシブセンサ11の観測行列、vpkは、観測時刻tkのパッシブセンサ11の平均0、共分散行列Rpkの観測雑音ベクトル、σθkは、観測時刻tkにおける観測雑音の方位角成分の標準偏差である。
【0026】
アクティブセンサ12の観測モデルを、以下の式(9)〜式(11)のように定義する。
【数9】
【数10】
【数11】
【0027】
ここで、yakは、観測時刻tkのアクティブセンサ12の観測ベクトル、Hakは、観測時刻tkのアクティブセンサ12の観測行列、vakは、観測時刻tkのアクティブセンサ12の平均0、共分散行列Rakの観測雑音ベクトル、σrkは、観測時刻tkにおける観測雑音の距離成分の標準偏差である。なお、アクティブセンサ12が、測距・測角データの代わりに、測距データのみを出力する場合、アクティブセンサ12の観測行列Hak及び共分散行列Rakを、それぞれ以下の式(12)及び式(13)のように変化させることで対応できる。
【数12】
【数13】
【0028】
ST203の動作ステップでは、パッシブセンサ11からの測角データを用いて、以下の式(14)〜式(18)で表される平滑処理を実施する。
【数14】
【数15】
【数16】
【数17】
【数18】
【0029】
ここで、(yチルダ)pkは、観測時刻tkのパッシブセンサ11の残差ベクトル、Spkは、観測時刻tkのパッシブセンサの残差共分散行列、Kpkは、観測時刻tkのパッシブセンサ11のカルマンゲイン行列、(xハット)k|kは、観測時刻tkの平滑ベクトル、Pk|kは、観測時刻tkの平滑誤差共分散行列、(xハット)k|k−1は、観測時刻tkの予測ベクトル、Pk|k−1は、観測時刻tkの予測誤差共分散行列である。また、A−1は、行列Aの逆行列を示す。
【0030】
ST205では、アクティブセンサ12からの測距・測角データを用いて以下の式(19)〜式(23)で表される平滑処理を実施する。
【数19】
【数20】
【数21】
【数22】
【数23】
【0031】
ここで、(yチルダ)akは、観測時刻tkのアクティブセンサ12の残差ベクトル、Sakは、観測時刻tkのアクティブセンサ12の残差共分散行列、Kakは、観測時刻tkのアクティブセンサ12のカルマンゲイン行列である。
【0032】
次に、ST206の動作ステップでのマニューバ検出の際の処理内容について説明する。この動作ステップでは、以下の式(24)〜式(25)により、マニューバ状態(マニューバの有無)を検出し、マニューバ段階値に区分する。
【数24】
【数25】
【0033】
ここで、εkは、観測時刻tkの正規化残差、(yチルダ)p/akは、観測時刻tkのパッシブセンサ11又はアクティブセンサ12の残差ベクトル、f1(・)は、パッシブセンサ11又はアクティブセンサ12の残差ベクトルの方位角成分を抽出する関数、Sp/akは、観測時刻tkのパッシブセンサ11又はアクティブセンサ12の残差共分散行列、f2(・)は、パッシブセンサ11又はアクティブセンサ12の残差共分散行列の方位角成分を抽出する関数、mkは、観測時刻tkのマニューバ段階値(マニューバの有無)、thaとthvは、マニューバの有と無のそれぞれのしきい値であり、tha>thvである。なお、正規化残差εkの算出は、複数観測回の残差ベクトルを重み付き平均するように構成することができる。
【0034】
次に、ST207の動作ステップでの予測処理の処理内容について説明する。この動作ステップでは、以下の式(26)〜式(27)で表される予測処理を実施する。
【数26】
【数27】
【0035】
ここで、(xハット)k+1|kは、観測時刻tk+1の予測ベクトル、Pk+1|kは、観測時刻tk+1の予測誤差共分散行列である。なお、共分散行列Qkは、目標距離の真値rkが得られないため、以下の式(28)のように平滑距離rk|kを用いて算出した値を用いると共に、システム雑音の標準偏差σskは、目標のマニューバ段階値mkによって変化させ、マニューバ段階値が1の場合、大きな値、マニューバ段階値が0の場合、小さな値とする。
【数28】
【0036】
次に、ST208の動作ステップでのスケジューリングの処理内容について説明する。この動作ステップでは、以下の式(29)〜式(30)のいずれかを満足する場合、アクティブセンサ12を用いるようにスケジューリングする。
【数29】
【数30】
【0037】
ここで、f3(・)は、誤差共分散行列の距離成分を抽出する関数、thrは、しきい値である。なお、平滑誤差共分散行列Pk|kを用いた式(30)の代わりに、以下の式(31)で表されるように、予測誤差共分散行列Pk+1|kを用いるように構成することができる。
【数31】
【0038】
また、上記した式(29)〜式(31)のいずれかを満足する場合、アクティブセンサ12を用いるようにスケジューリングするよう構成することもできる。
【0039】
以上説明したように、本実施例においては、パッシブセンサ及びアクティブセンサによる目標の観測値を融合し、これを等速直線運動等の所定の運動モデルに基づき構成された追尾フィルタによりフィルタリング処理を行って、その処理結果と観測値との残差、すなわち、所定の運動モデルと異なる目標の運動を、目標のマニューバとして検出し、マニューバ段階値として定量化している。そして、このマニューバ段階値が変化した場合、及びフィルタリング処理による目標の平滑誤差共分散行列または予測誤差共分散行列から算出される誤差共分散成分が所定のしきい値を越えた場合の少なくとも1つの場合に、継続して観測を行っているパッシブセンサに加え、アクティブセンサによる観測を行うように観測スケジューリングを制御している。
【0040】
これにより、例えば、比較的直線的な運動をしている目標(低マニューバの目標)に対してはアクティブセンサを使用する時間間隔を広くして自装置の被探知性を下げ、かつ低消費電力化するとともに、旋回運動のように激しい動きをしている目標(高マニューバの目標)に対してはアクティブセンサを使用する時間間隔を狭くして、その追尾性能を維持・向上させている。従って、被探知性を低下させつつ追尾性能を向上させた、小型かつ低消費電力の複合センサ装置を得ることができる。
【実施例2】
【0041】
図4は、本発明に係る複合センサ装置の第2の実施例の構成を示すブロック図である。また、図5は、この複合センサ装置の第2の実施例の動作を説明するためのフローチャートである、この第2の実施例について、図1乃至図3に示す第1の実施例の各部と同一の部分は同一の符号で示し、その説明は省略する。この第2の実施例が第1の実施例と異なる点は、パッシブセンサ及びアクティブセンサの観測タイミングのスケジューリングを行う際に、第1の実施例においては、パッシブセンサによる目標の観測を継続しつつ、追尾フィルタによるフィルタリング処理結果の平滑誤差共分散行列または予測誤差共分散行列から算出される誤差共分散成分が所定のしきい値を超えた場合、及び目標のマニューバ段階値が変化した場合の少なくとも1つの場合に、アクティブセンサにより目標の観測を行うようスケジューリングしたのに対し、第2の実施例においては、あらかじめマニューバ段階値とアクティブセンサ12aの観測時間間隔とを対応付けたテーブル等を有し、パッシブセンサによる目標の観測を継続しつつ、この目標のマニューバ段階値から上記のテーブルを参照して得たアクティブセンサの観測時間間隔に基づいて、アクティブセンサによる観測をスケジューリングするようにした点である。また、アクティブセンサに対しては、目標情報に基づいて電磁波または音波の放射方向を制御するようにした点である。さらに、第1の実施例では、追尾フィルタを線形カルマンフィルタとしたが、第2の実施例では、これを拡張カルマンフィルタを用いるようにした点である。以下、前出の図1乃至図3、ならびに図4及び図5を参照して、その相違点を中心に説明する。
【0042】
図4に例示したように、この複合センサ装置は、パッシブセンサ11、アクティブセンサ12a、データ融合・追尾処理部13a、マニューバ検出部14、及び制御部15aから構成されている。パッシブセンサ11、及びマニューバ検出部14は、第1の実施例と同一に構成されている。アクティブセンサ12aは、後述する制御部15aからの制御による指向方向及び観測タイミングで電磁波または音波を放射して目標までの距離及び角度を観測し、その結果をデータ融合・追尾処理部13aに送出する。データ融合・追尾処理部13aは、その内部の追尾フィルタを拡張カルマンフィルタとし、この追尾フィルタを用いてパッシブセンサ11及びアクティブセンサ12aからの観測結果を融合したデータをフィルタリング処理し、目標の平滑値及び平滑誤差共分散行列、ならびに目標の予測値及び予測誤差共分散行列を含む目標情報を算出する。追尾フィルタの運動モデルは、本実施例においても、例えば等速直線運動としている。また、マニューバ検出部14からのマニューバ段階値に基づいて、システム雑音のレベルが目標の運動モデルに適合するよう制御する。
【0043】
制御部15aは、マニューバ段階値とアクティブセンサ12aの観測時間間隔とをあらかじめ対応付けたテーブルを有し、このテーブルを参照して得た観測時間間隔に基づいて、パッシブセンサ11による目標の観測を継続しつつ、アクティブセンサ12aによる観測タイミングのスケジューリングを行う。このテーブルには、例えば低マニューバに対応したマニューバ段階値に対してはアクティブセンサ12aの観測時間間隔を長く設定し、反対に高マニューバに対しては短い観測時間間隔を設定することによって、自装置の被探知性を低下させつつ、追尾性能の向上を図っている。加えて、データ融合・追尾処理部13aからの目標情報に基づいて、アクティブセンサ12aに対して電磁波または音波の放射方向の制御を行う。
【0044】
次に、図5のフローチャートを参照して、この第2の実施例の複合センサ装置の動作について説明する。はじめに、全体の動作の流れを説明する。
【0045】
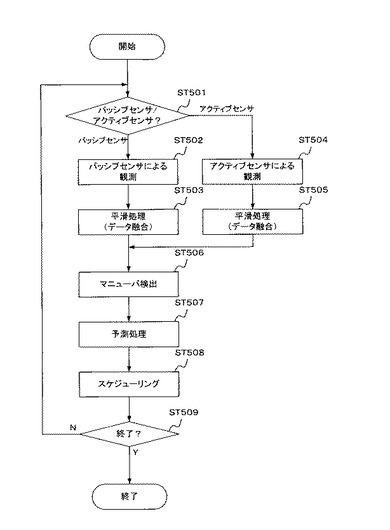
まず、制御部15aによるスケジューリングにより、当該観測タイミングでのセンサの選択がなされる(ST501)。ここで、パッシブセンサ11が選択されると、制御部15aからの制御に従ってパッシブセンサ11による目標の角度の観測が行われ、その観測結果がデータ融合・追尾処理部13aに送出される(ST502)。データ融合・追尾処理部13aでは、この観測結果に基づいて追尾フィルタによるフィルタリング処理が実行され、目標の平滑値及び平滑誤差共分散行列が算出される(ST503)。一方、ST501の動作ステップにおいてアクティブセンサ12aが選択されると、センサの指向・放射方向の制御を含む制御部15aからの制御に従ってアクティブセンサ12aによる目標の距離及び角度の観測が行われ、その観測結果がデータ融合・追尾処理部13aに送出される(ST504)。データ融合・追尾処理部13aでは、これら観測結果に基づいてフィルタリング処理により目標の平滑値及び平滑誤差共分散行列が算出される(ST505)。
【0046】
次いで、データ融合・追尾処理部13aで算出されたこれら目標情報と観測値との残差及び残差共分散行列に基づいて、マニューバ検出部14では、目標のマニューバを検出する。そして、その検出結果は、マニューバの程度に応じて複数の段階に区分されたマニューバ段階値として出力される(ST506)。次いで、このマニューバ段階値に基づいて、データ融合・追尾処理部13aでは、内部の追尾フィルタに対して、そのシステム雑音レベルがより目標の運動モデルに適合するように制御を行うとともに、フィルタリング処理が継続されて、目標の予測値及び予測誤差共分散行列が算出される(ST507)。
【0047】
これとあわせ、マニューバ検出部14からのマニューバ段階値は制御部15aにも送出される。制御部15aには、マニューバ段階値とアクティブセンサ12aの観測時間間隔とをあらかじめ対応付けたテーブルが設定されており、制御部15aは、このテーブルを参照してアクティブセンサ12aにより目標の観測を行う観測時間間隔を取得するとともに、パッシブセンサ11による目標の観測を継続しつつ、このテーブルを参照して取得した観測時間間隔でアクティブセンサ12aを動作させるように以降の観測タイミングのスケジューリングがなされる。テーブルには、例えば低マニューバのマニューバ段階値に対しては長い観測時間間隔が設定され、高マニューバに対応したマニューバ段階値に対しては短い観測時間間隔が設定されており、観測を継続する中で検出されたマニューバ段階値の変化に応じてアクティブセンサ12aによる観測頻度を制御し、自装置の被探知性を低下させつつ、追尾性能の向上を図っている。さらに、制御部15aは、データ融合・追尾処理部13aから目標情報を受けとり、これらに基づきアクティブセンサ12aに対して、観測中の目標の方向に電磁波または音波を放射するよう、放射方向の制御を行う。そして、これら観測タイミングのスケジューリング結果及び放射方向の制御情報は、制御部15aからパッシブセンサ11及びアクティブセンサ12aに送出される(ST508)。以降、動作終了まで上述した一連の動作ステップが繰り返される(ST509)。
【0048】
次に、上記した各動作ステップにおける処理内容について詳細に説明する。まず、ST503及びST505のステップでのフィルタリング処理に際して、目標の角度を観測するパッシブセンサ11、ならびに距離及び角度を観測するアクティブセンサ12aからの観測結果を観測値ベースでデータ融合する場合の処理内容について説明する。
【0049】
目標の運動モデルを、以下の式(32)〜式(36)のように定義する。
【数32】
【数33】
【数34】
【数35】
【数36】
【0050】
ここで、xkは、観測時刻tkにおけるx軸の位置pxk、y軸の位置pykとその速度成分からなる状態ベクトル、FkとGkは、観測時刻tkから観測時刻tk+1への遷移行列と駆動行列、wkは、観測時刻tkの平均0、共分散行列Qkのシステム雑音ベクトル、σskは、観測時刻tkにおけるシステム雑音の標準偏差である。また、ATは、ベクトル又は行列Aの転置、Inは、n行n列の単位行列、Onは、n行n列の零行列を示す。
【0051】
パッシブセンサ11の観測モデルを以下の式(37)〜式(39)のように定義する。
【数37】
【数38】
【数39】
【0052】
ここで、ypkは、観測時刻tkのパッシブセンサ11の観測ベクトル、hpk(・)は、観測時刻tkのパッシブセンサ11の観測関数、vpkは、観測時刻tkのパッシブセンサ11の平均0、共分散行列Rpkの観測雑音ベクトルである。
【0053】
アクティブセンサ12aの観測モデルを以下の式(40)〜式(42)ように定義する。
【数40】
【数41】
【数42】
【0054】
ここで、yakは、観測時刻tkのアクティブセンサ12aの観測ベクトル、hak(・)は、観測時刻tkのアクティブセンサ12aの観測関数、vakは、観測時刻tkのアクティブセンサ12aの平均0、共分散行列Rakの観測雑音ベクトルである。
【0055】
ST503の動作ステップでは、パッシブセンサ11からの測角データを用いて、以下の式(43)〜式(48)で表される平滑処理を実施する。
【数43】
【数44】
【数45】
【数46】
【数47】
【数48】
【0056】
ここで、(yチルダ)pkは、観測時刻tkのパッシブセンサ11の残差ベクトル、Hpkは、観測時刻tkのパッシブセンサ11のヤコビアン行列、Spkは、観測時刻tkのパッシブセンサ11の残差共分散行列、Kpkは、観測時刻tkのパッシブセンサ11のカルマンゲイン行列、(xハット)k|kは、観測時刻tkの平滑ベクトル、Pk|kは、観測時刻tkの平滑誤差共分散行列、(xハット)k|k−1は、観測時刻tkの予測ベクトル、Pk|k−1は、観測時刻tkの予測誤差共分散行列である。また、A−1は、行列Aの逆行列を示す。
【0057】
ST505の動作ステップでは、アクティブセンサ12aからの測距・測角データを用いて以下の式(49)〜式(54)で表される平滑処理を実施する。
【数49】
【数50】
【数51】
【数52】
【数53】
【数54】
【0058】
ここで、(yチルダ)akは、観測時刻tkのアクティブセンサ12aの残差ベクトル、Hakは、観測時刻tkのアクティブセンサ12aのヤコビアン行列、Sakは、観測時刻tkのアクティブセンサ12aの残差共分散行列、Kakは、観測時刻tkのアクティブセンサ12aのカルマンゲイン行列である。
【0059】
次に、ST506の動作ステップでのマニューバ検出の際の処理内容について説明する。この動作ステップでは、以下の式(55)〜式(56)により、マニューバ状態を検出し、マニューバ段階値に区分する。
【数55】
【数56】
【0060】
ここで、εkは、観測時刻tkの正規化残差、(yチルダ)p/akは、観測時刻tkのパッシブセンサ11又はアクティブセンサ12aの残差ベクトル、f1(・)は、パッシブセンサ11又はアクティブセンサ12aの残差ベクトルの方位角成分を抽出する関数、Sp/akは、観測時刻tkのパッシブセンサ11又はアクティブセンサ12aの残差共分散行列、f2(・)は、パッシブセンサ11又はアクティブセンサ12aの残差共分散行列の方位角成分を抽出する関数、mkは、観測時刻tkのマニューバ段階値(マニューバ状態)、th1とth2は、マニューバ段階値判定のそれぞれのしきい値であり、th2>th1である。なお、マニューバ段階値の分割数は、上記3つに限定されず、任意の値を選択できる。
【0061】
次に、ST507の動作ステップでの予測処理の処理内容について説明する。この動作ステップでは、以下の式(57)〜式(58)で表される予測処理を実施する。
【数57】
【数58】
【0062】
ここで、(xハット)k+1|kは、観測時刻tk+1の予測ベクトル、Pk+1|kは、観測時刻tk+1の予測誤差共分散行列である。なお、共分散行列Qkは、以下の式(59)を用いると共に、システム雑音の標準偏差σskは、目標のマニューバ状態mkによって変化させる。
【数59】
【0063】
次に、ST508の動作ステップでのスケジューリングの処理内容について説明する。この動作ステップでは、以下の式(60)を満足する場合、アクティブセンサ12aを用いるようにスケジューリングする。
【数60】
【0064】
ここで、takは、最後にアクティブセンサ12aを用いたときの観測時刻、Δt(・)は、マニューバ段階値に対応させてあらかじめ設定されたアクティブセンサ12aの観測時間間隔である。
【0065】
以上説明したように、本実施例においても、第1の実施例と同様に、パッシブセンサ及びアクティブセンサによる目標の観測値を融合し、これを所定の運動モデルに基づき構成された追尾フィルタによりフィルタリング処理を行って、その処理結果と観測値との残差から目標のマニューバを検出し、マニューバ段階値として定量化している。そして、マニューバ段階値とアクティブセンサの観測時間間隔とをあらかじめ対応付けたテーブルに基づいて、パッシブセンサによる目標の観測を継続しつつ、アクティブセンサを使用した観測タイミングのスケジューリングを行っている。このテーブルに設定されたアクティブセンサの観測時間間隔は、低マニューバに対応したマニューバ段階値に対しては広い観測時間間隔が、また、高マニューバに対応したマニューバ段階値に対しては狭い観測時間間隔が設定されている。
【0066】
これにより、第1の実施例と同様に、比較的直線的な運動をしている目標(低マニューバの目標)に対してはアクティブセンサを使用する時間間隔を広くして自装置の被探知性を下げ、かつ低消費電力化するとともに、旋回運動のように激しい動きをしている目標(高マニューバの目標)に対してはアクティブセンサを使用する時間間隔を狭くして、その追尾性能を維持・向上させている。加えて、アクティブセンサに対して、観測中の目標の方向に電磁波または音波を放射するように放射方向の制御を行い、被探知性をより一層低下させるとともに、電力消費を抑制している。従って、被探知性を低下させつつ追尾性能を向上させた、小型かつ低消費電力の複合センサ装置を得ることができる。
【0067】
なお、本発明は、上記した実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、上記実施形態に開示されている複数の構成要素の適宜な組み合せにより種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。さらに、異なる実施形態に亘る構成要素を適宜組み合せてもよい。
【図面の簡単な説明】
【0068】
【図1】本発明に係る複合センサ装置の第1の実施例の構成を示すブロック図。
【図2】図1に例示した本発明に係る複合センサ装置の第1の実施例の動作を説明するためのフローチャート。
【図3】各観測タイミングで使用されるセンサとマニューバ段階値との関係をモデル化して例示した説明図。
【図4】本発明に係る複合センサ装置の第2の実施例の構成を示すブロック図。
【図5】図4に例示した本発明に係る複合センサ装置の第2の実施例の動作を説明するためのフローチャート。
【図6】従来の複合センサ装置の構成の一例を示すブロック図。
【図7】図6に例示した従来の複合センサ装置の動作を説明するためのフローチャート。
【符号の説明】
【0069】
11 パッシブセンサ
12、12a アクティブセンサ
13、13a データ融合・追尾処理部
14 マニューバ検出部
15、15a 制御部
【技術分野】
【0001】
本発明は、電磁波または音波を放射することなく目標を観測するパッシブセンサと、電磁波または音波を放射して目標を観測するアクティブセンサとを用いて目標情報を取得する複合センサ装置に関する。
【背景技術】
【0002】
従来より、電磁波または音波の放射を伴わないパッシブセンサと、電磁波または音波を放射するアクティブセンサとを用いて目標を観測する装置が知られている(例えば、特許文献1参照。)。このような、パッシブセンサ及びアクティブセンサによる目標の観測値を用いて目標の追尾を行う、従来の複合センサ装置の構成の一例を図6のブロック図に示す。この図6に例示した従来の複合センサ装置は、電磁波または音波を放射せずに目標の角度を観測するパッシブセンサ61、電磁波または音波を放射して目標の距離及び角度を観測するアクティブセンサ62、パッシブセンサ61からの観測値に基づき追尾フィルタを用いて目標の角度の平滑値、及び予測値を算出する角度追尾処理部63、アクティブセンサ62からの観測値に基づき追尾フィルタを用いて目標の距離、及び角度の平滑値、及び予測値を算出する距離・角度追尾処理部64、ならびに、角度追尾処理部63及び距離・角度追尾処理部64からのそれぞれの処理結果をデータ融合して目標の平滑値、及び予測値を算出するとともに、パッシブセンサ61及びアクティブセンサ62の観測タイミングのスケジューリングを行うデータ融合・制御部65から構成されている。
【0003】
次に、この図6に例示した従来の複合センサ装置の動作について、図7のフローチャートを参照して説明する。まず、データ融合・制御部65によるスケジューリングにより、当該観測タイミングでのセンサの選択制御がなされる(ST701)。ここで、パッシブセンサ61が選択されると、このデータ融合・制御部65からの制御信号に基づきパッシブセンサ61による目標の観測が行われ(ST702)、さらに、その観測値としての測角データに基づいて、角度追尾処理部63において追尾フィルタを用いた処理により目標の角度の平滑値、及び予測値が算出され、データ融合・制御部65に送出される(ST703)。一方、ST701の動作ステップにおいてアクティブセンサ62が選択されると、データ融合・制御部65から制御信号に基づきアクティブセンサ62による目標の観測が行われ(ST704)、さらに、その観測値としての測距・測角データに基づいて、距離・角度追尾処理部64において追尾フィルタを用いた処理により目標の距離及び角度の平滑値、及び予測値が算出され、データ融合・制御部65に送出される(ST705)。
【0004】
次いで、データ融合・制御部65において、各観測タイミングで取得された角度追尾処理部63、及び距離・角度追尾処理部64からの平滑値がデータ融合され、目標の平滑値及び予測値が算出される(ST706)。次いで、以降の観測タイミングのセンサ選択のスケジューリングがなされ、各センサに通知される(ST707)。そして、動作終了が指示されるまで、上記した一連の動作ステップが繰り返される(ST708)。なお、追尾フィルタ等については、例えば、非特許文献1等に詳述されている。
【特許文献1】特開平7−128436号公報(第4ページ、図1)
【非特許文献1】吉田孝監修「改訂レーダ技術」電子情報通信学会、平成8年10月1日、P.264−267
【発明の開示】
【発明が解決しようとする課題】
【0005】
上記したように、パッシブセンサとアクティブセンサとによって構成された複合センサ装置では、センサ観測値を追尾フィルタによってフィルタリング処理し、目標の平滑値や予測値等の目標情報を取得している。ここで、装置の被探知性を低下させるには、パッシブセンサにより目標の角度情報を継続して観測しつつ、目標の角度及び距離情報が観測可能なアクティブセンサの使用を最小限に抑えるよう、それぞれのセンサの観測タイミングがスケジューリングされる。
【0006】
しかしながら、目標が、例えば追尾フィルタの運動モデルと異なるような、急激な変化を伴う運動を行った場合等は、フィルタリング処理後における目標情報中の誤差が増大してしまうことがあり、必ずしも十分な追尾性能を得ることができなかった。また、追尾性能を向上させるためにアクティブセンサを使用する時間間隔を狭くすると、被探知性が悪化するとともに、電磁波等の放射に要する消費電力の増大、そしてそれに伴う装置冷却や電力供給のために装置が大型化するという課題があった。
【0007】
本発明は、上述の事情を考慮してなされたものであり、被探知性を低下させつつ、追尾性能の向上を図るとともに、消費電力を抑えて小型化した複合センサ装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するために、本発明の複合センサ装置は、電磁波または音波の放射を伴わずに目標の角度を観測するパッシブセンサと、電磁波または音波を放射して前記目標までの距離または前記目標までの距離及び角度を観測するアクティブセンサと、所定の運動モデルに基づき構成された追尾フィルタを有し、前記パッシブセンサによる目標の観測結果と前記アクティブセンサによる目標の観測結果とを観測値レベルで融合したデータから前記目標の平滑値及び平滑誤差共分散行列ならびに予測値及び予測誤差共分散行列を含む目標情報を算出する追尾手段と、この追尾手段での目標情報の算出時における観測値との残差及び残差共分散行列に基づき前記所定の運動モデルと異なる前記目標の運動をこの目標のマニューバとして検出するとともに、この検出したマニューバの状態をあらかじめ設定された複数のしきい値に対応付けた複数のマニューバ段階値に区分するマニューバ検出手段と、このマニューバ検出手段からのマニューバ段階値に基づき前記追尾フィルタのシステム雑音のレベルを制御するシステム雑音制御手段と、前記パッシブセンサによる前記目標の観測を継続しつつ、前記追尾手段からの平滑誤差共分散行列、予測誤差共分散行列、及び前記マニューバ検出手段からのマニューバ段階値の少なくとも1つに基づいて、前記パッシブセンサ及び前記アクティブセンサの観測タイミングのスケジューリングを行うセンサ制御手段とを有することを特徴とする。
【0009】
また、前記センサ制御手段は、前記パッシブセンサによる前記目標の観測を継続しつつ、前記追尾手段からの前記目標の平滑誤差共分散行列または予測誤差共分散行列から算出される誤差共分散成分が所定のしきい値を超えた場合、及び前記マニューバ検出手段からの前記目標のマニューバ段階値が変化した場合の少なくとも1つの場合に、前記アクティブセンサにより前記目標の観測を行うようスケジューリングすることを特徴とする。
【0010】
また、前記センサ制御手段は、前記パッシブセンサによる前記目標の観測を継続しつつ、前記マニューバ検出手段からの前記目標のマニューバ段階値に対応付けてあらかじめ設定された前記アクティブセンサの観測時間間隔に基づいて、前記アクティブセンサにより前記目標の観測を行うようスケジューリングすることを特徴とする。
【0011】
さらに、前記センサ制御手段は、前記追尾手段からの目標情報に基づいて前記アクティブセンサの電磁波または音波の放射方向を制御するとともに、前記アクティブセンサは、この制御に基づき指定された方向に電磁波または音波を放射することを特徴とする。
【発明の効果】
【0012】
本発明によれば、被探知性を低下させつつ追尾性能を向上させた、小型かつ低消費電力の複合センサ装置を得ることができる。
【発明を実施するための最良の形態】
【0013】
以下に、本発明に係る複合センサ装置を実施するための最良の形態について、図1乃至図5を参照して説明する。
【実施例1】
【0014】
図1は、本発明に係る複合センサ装置の第1の実施例の構成を示すブロック図である。この図1に例示した複合センサ装置は、パッシブセンサ11、アクティブセンサ12、データ融合・追尾処理部13、マニューバ検出部14、及び制御部15から構成されている。パッシブセンサ11は、例えば撮像センサや電波受信センサ等を有し、電磁波または音波の放射を伴わずに、後述する制御部15からの制御による観測タイミングで目標の角度を観測し、その結果をデータ融合・追尾処理部13に送出する。アクティブセンサ12は、例えばレーザセンサやレーダセンサ等を有し、制御部15からの制御による観測タイミングで電磁波または音波を放射して目標までの距離及び角度を観測し、その結果をデータ融合・追尾処理部13に送出する。
【0015】
データ融合・追尾処理部13は、所定の運動モデルに基づき構成された追尾フィルタを有しており、パッシブセンサ11及びアクティブセンサ12からの観測結果を融合したデータを、この追尾フィルタを用いてフィルタリング処理し、目標の平滑値及び平滑誤差共分散行列、ならびに目標の予測値及び予測誤差共分散行列を含む目標情報を算出する。本実施例においては、追尾フィルタを、例えば線形カルマンフィルタとし、その運動モデルは、例えば等速直線運動としている。また、後述するマニューバ検出部14からのマニューバ段階値に基づいて、上記した自身の追尾フィルタ内に目標運動の不確実さ(誤差)成分として取り込んであるシステム雑音のレベルが目標の運動モデルに適合するよう制御する。
【0016】
マニューバ検出部14は、データ融合・追尾処理部13において算出した目標情報と観測値との残差及び残差共分散行列に基づいて、上記した追尾フィルタの運動モデルと異なる目標の運動を検出し、これをその目標のマニューバとして、あらかじめ設定された複数のしきい値に対応付けたマニューバ段階値に区分して出力する。本実施例においては、追尾フィルタの運動モデルを等速直線運動としているので、検出される目標のマニューバとしては、例えば目標を航空機とすると、運動モデルと異なる動き、すなわち、上昇、下降、及び旋回といった運動について、その緩急に応じて区分されてマニューバ段階値として出力される。
【0017】
制御部15は、データ融合・追尾処理部13からの目標情報、及びマニューバ検出部14からのマニューバ段階値の少なくとも1つに基づいて、パッシブセンサ11及びアクティブセンサ12の観測タイミングのスケジューリングを行う。本実施例では、装置の被探知性を低下させるように、パッシブセンサ11による目標の角度の観測を継続しつつ、アクティブセンサ12の使用を最小限に抑えたスケジューリングがなされる。また、本実施例においては、データ融合・追尾処理部13にて算出された目標の平滑誤差共分散行列または予測誤差共分散行列から算出される誤差共分散成分が所定のしきい値を越えた場合、及びマニューバ検出部14からの目標のマニューバ段階値が変化した場合の少なくとも1つの場合に、アクティブセンサ12を動作させるようスケジューリングを行う。すなわち、パッシブセンサ11に対しては、例えば等時間間隔で継続して観測を行うようにスケジューリングする中で、上記した条件の少なくとも1つが発生した場合には、直後の観測タイミングではアクティブセンサ12を用いた観測を行うよう、各センサに対するスケジューリングを行う。
【0018】
次に、前出の図1、ならびに図2のフローチャートを参照して、上述のように構成された本実施例の複合センサ装置の動作について説明する。図2は、図1に例示した本発明に係る複合センサ装置の第1の実施例の動作を説明するためのフローチャートである。
【0019】
はじめに、図2を参照して、全体の動作の流れを説明する。まず、制御部15によるスケジューリングにより、当該観測タイミングでのセンサの選択がなされる(ST201)。ここで、パッシブセンサ11が選択されると、制御部15からの制御に従ってパッシブセンサ11による目標の角度の観測が行われ、その観測結果がデータ融合・追尾処理部13に送出される(ST202)。データ融合・追尾処理部13では、この観測結果に基づいて追尾フィルタによるフィルタリング処理が実行され、目標の平滑値及び平滑誤差共分散行列が算出される(ST203)。一方、ST201の動作ステップにおいてアクティブセンサ12が選択されると、制御部15からの制御に従ってアクティブセンサ12による目標の距離及び角度の観測が行われ、その観測結果がデータ融合・追尾処理部13に送出される(ST204)。データ融合・追尾処理部13では、これら観測結果に基づいてフィルタリング処理により目標の平滑値及び平滑誤差共分散行列が算出される(ST205)。
【0020】
次いで、データ融合・追尾処理部13で算出されたこれら目標情報と観測値との残差及び残差共分散行列に基づいて、マニューバ検出部14では、目標のマニューバを検出する。そして、その検出結果は、マニューバの程度に応じて複数の段階に区分されたマニューバ段階値として出力される(ST206)。次いで、このマニューバ段階値に基づいて、データ融合・追尾処理部13では、内部の追尾フィルタに対して、そのシステム雑音レベルがより目標の運動モデルに適合するように制御を行うとともに、フィルタリング処理が継続されて、目標の予測値及び予測誤差共分散行列が算出される(ST207)。次いで、制御部15では、このようにしてデータ融合・追尾処理部13にて算出された目標の平滑誤差共分散行列または予測誤差共分散行列から算出される誤差共分散成分が所定のしきい値を越えた場合、及びマニューバ検出部14からの目標のマニューバ段階値が変化した場合の、少なくとも1つの場合にアクティブセンサ12を動作させるよう、以降の観測タイミングにおける各センサのスケジューリングがなされる。図3にその一例をモデル化して示す。図3の事例では、マニューバ検出部14からのマニューバ段階値が変化した場合にアクティブセンサ12を動作させるようスケジューリングしたものであり、等時間間隔に設定された観測タイミングにおいて、パッシブセンサ11による観測を継続しつつ、マニューバ検出部14からのマニューバ段階値が変化した場合に、その直後の観測タイミングでは、アクティブセンサ12を動作させ観測を行っている。なお、誤差共分散成分がしきい値を越えた場合もこの事例と同様に、その直後の観測タイミングでアクティブセンサ12を動作させるよう制御される(ST208)。以降、動作終了まで上述した一連の動作ステップが繰り返される(ST209)。
【0021】
次に、上記した各動作ステップにおける処理内容について詳細に説明する。まず、ST203及びST205のステップでのフィルタリング処理に際して、目標の角度を観測するパッシブセンサ11、ならびに距離及び角度を観測するアクティブセンサ12からの観測結果を観測値ベースでデータ融合する場合の処理内容について説明する。
【0022】
目標の運動モデルを、以下の式(1)〜式(5)のように定義する。
【数1】
【数2】
【数3】
【数4】
【数5】
【0023】
ここで、xkは、観測時刻tkにおける距離rk、方位角θkとその速度成分からなる状態ベクトル、FkとGkは、観測時刻tkから観測時刻tk+1への遷移行列と駆動行列、wkは、観測時刻tkの平均0、共分散行列Qkのシステム雑音ベクトル、σskは、観測時刻tkにおけるシステム雑音の標準偏差である。また、ATは、ベクトル又は行列Aの転置、Inは、n行n列の単位行列、Onは、n行n列の零行列を示す。
【0024】
パッシブセンサ11の観測モデルを、以下の式(6)〜式(8)のように定義する。
【数6】
【数7】
【数8】
【0025】
ここで、ypkは、観測時刻tkのパッシブセンサ11の観測ベクトル、Hpkは、観測時刻tkのパッシブセンサ11の観測行列、vpkは、観測時刻tkのパッシブセンサ11の平均0、共分散行列Rpkの観測雑音ベクトル、σθkは、観測時刻tkにおける観測雑音の方位角成分の標準偏差である。
【0026】
アクティブセンサ12の観測モデルを、以下の式(9)〜式(11)のように定義する。
【数9】
【数10】
【数11】
【0027】
ここで、yakは、観測時刻tkのアクティブセンサ12の観測ベクトル、Hakは、観測時刻tkのアクティブセンサ12の観測行列、vakは、観測時刻tkのアクティブセンサ12の平均0、共分散行列Rakの観測雑音ベクトル、σrkは、観測時刻tkにおける観測雑音の距離成分の標準偏差である。なお、アクティブセンサ12が、測距・測角データの代わりに、測距データのみを出力する場合、アクティブセンサ12の観測行列Hak及び共分散行列Rakを、それぞれ以下の式(12)及び式(13)のように変化させることで対応できる。
【数12】
【数13】
【0028】
ST203の動作ステップでは、パッシブセンサ11からの測角データを用いて、以下の式(14)〜式(18)で表される平滑処理を実施する。
【数14】
【数15】
【数16】
【数17】
【数18】
【0029】
ここで、(yチルダ)pkは、観測時刻tkのパッシブセンサ11の残差ベクトル、Spkは、観測時刻tkのパッシブセンサの残差共分散行列、Kpkは、観測時刻tkのパッシブセンサ11のカルマンゲイン行列、(xハット)k|kは、観測時刻tkの平滑ベクトル、Pk|kは、観測時刻tkの平滑誤差共分散行列、(xハット)k|k−1は、観測時刻tkの予測ベクトル、Pk|k−1は、観測時刻tkの予測誤差共分散行列である。また、A−1は、行列Aの逆行列を示す。
【0030】
ST205では、アクティブセンサ12からの測距・測角データを用いて以下の式(19)〜式(23)で表される平滑処理を実施する。
【数19】
【数20】
【数21】
【数22】
【数23】
【0031】
ここで、(yチルダ)akは、観測時刻tkのアクティブセンサ12の残差ベクトル、Sakは、観測時刻tkのアクティブセンサ12の残差共分散行列、Kakは、観測時刻tkのアクティブセンサ12のカルマンゲイン行列である。
【0032】
次に、ST206の動作ステップでのマニューバ検出の際の処理内容について説明する。この動作ステップでは、以下の式(24)〜式(25)により、マニューバ状態(マニューバの有無)を検出し、マニューバ段階値に区分する。
【数24】
【数25】
【0033】
ここで、εkは、観測時刻tkの正規化残差、(yチルダ)p/akは、観測時刻tkのパッシブセンサ11又はアクティブセンサ12の残差ベクトル、f1(・)は、パッシブセンサ11又はアクティブセンサ12の残差ベクトルの方位角成分を抽出する関数、Sp/akは、観測時刻tkのパッシブセンサ11又はアクティブセンサ12の残差共分散行列、f2(・)は、パッシブセンサ11又はアクティブセンサ12の残差共分散行列の方位角成分を抽出する関数、mkは、観測時刻tkのマニューバ段階値(マニューバの有無)、thaとthvは、マニューバの有と無のそれぞれのしきい値であり、tha>thvである。なお、正規化残差εkの算出は、複数観測回の残差ベクトルを重み付き平均するように構成することができる。
【0034】
次に、ST207の動作ステップでの予測処理の処理内容について説明する。この動作ステップでは、以下の式(26)〜式(27)で表される予測処理を実施する。
【数26】
【数27】
【0035】
ここで、(xハット)k+1|kは、観測時刻tk+1の予測ベクトル、Pk+1|kは、観測時刻tk+1の予測誤差共分散行列である。なお、共分散行列Qkは、目標距離の真値rkが得られないため、以下の式(28)のように平滑距離rk|kを用いて算出した値を用いると共に、システム雑音の標準偏差σskは、目標のマニューバ段階値mkによって変化させ、マニューバ段階値が1の場合、大きな値、マニューバ段階値が0の場合、小さな値とする。
【数28】
【0036】
次に、ST208の動作ステップでのスケジューリングの処理内容について説明する。この動作ステップでは、以下の式(29)〜式(30)のいずれかを満足する場合、アクティブセンサ12を用いるようにスケジューリングする。
【数29】
【数30】
【0037】
ここで、f3(・)は、誤差共分散行列の距離成分を抽出する関数、thrは、しきい値である。なお、平滑誤差共分散行列Pk|kを用いた式(30)の代わりに、以下の式(31)で表されるように、予測誤差共分散行列Pk+1|kを用いるように構成することができる。
【数31】
【0038】
また、上記した式(29)〜式(31)のいずれかを満足する場合、アクティブセンサ12を用いるようにスケジューリングするよう構成することもできる。
【0039】
以上説明したように、本実施例においては、パッシブセンサ及びアクティブセンサによる目標の観測値を融合し、これを等速直線運動等の所定の運動モデルに基づき構成された追尾フィルタによりフィルタリング処理を行って、その処理結果と観測値との残差、すなわち、所定の運動モデルと異なる目標の運動を、目標のマニューバとして検出し、マニューバ段階値として定量化している。そして、このマニューバ段階値が変化した場合、及びフィルタリング処理による目標の平滑誤差共分散行列または予測誤差共分散行列から算出される誤差共分散成分が所定のしきい値を越えた場合の少なくとも1つの場合に、継続して観測を行っているパッシブセンサに加え、アクティブセンサによる観測を行うように観測スケジューリングを制御している。
【0040】
これにより、例えば、比較的直線的な運動をしている目標(低マニューバの目標)に対してはアクティブセンサを使用する時間間隔を広くして自装置の被探知性を下げ、かつ低消費電力化するとともに、旋回運動のように激しい動きをしている目標(高マニューバの目標)に対してはアクティブセンサを使用する時間間隔を狭くして、その追尾性能を維持・向上させている。従って、被探知性を低下させつつ追尾性能を向上させた、小型かつ低消費電力の複合センサ装置を得ることができる。
【実施例2】
【0041】
図4は、本発明に係る複合センサ装置の第2の実施例の構成を示すブロック図である。また、図5は、この複合センサ装置の第2の実施例の動作を説明するためのフローチャートである、この第2の実施例について、図1乃至図3に示す第1の実施例の各部と同一の部分は同一の符号で示し、その説明は省略する。この第2の実施例が第1の実施例と異なる点は、パッシブセンサ及びアクティブセンサの観測タイミングのスケジューリングを行う際に、第1の実施例においては、パッシブセンサによる目標の観測を継続しつつ、追尾フィルタによるフィルタリング処理結果の平滑誤差共分散行列または予測誤差共分散行列から算出される誤差共分散成分が所定のしきい値を超えた場合、及び目標のマニューバ段階値が変化した場合の少なくとも1つの場合に、アクティブセンサにより目標の観測を行うようスケジューリングしたのに対し、第2の実施例においては、あらかじめマニューバ段階値とアクティブセンサ12aの観測時間間隔とを対応付けたテーブル等を有し、パッシブセンサによる目標の観測を継続しつつ、この目標のマニューバ段階値から上記のテーブルを参照して得たアクティブセンサの観測時間間隔に基づいて、アクティブセンサによる観測をスケジューリングするようにした点である。また、アクティブセンサに対しては、目標情報に基づいて電磁波または音波の放射方向を制御するようにした点である。さらに、第1の実施例では、追尾フィルタを線形カルマンフィルタとしたが、第2の実施例では、これを拡張カルマンフィルタを用いるようにした点である。以下、前出の図1乃至図3、ならびに図4及び図5を参照して、その相違点を中心に説明する。
【0042】
図4に例示したように、この複合センサ装置は、パッシブセンサ11、アクティブセンサ12a、データ融合・追尾処理部13a、マニューバ検出部14、及び制御部15aから構成されている。パッシブセンサ11、及びマニューバ検出部14は、第1の実施例と同一に構成されている。アクティブセンサ12aは、後述する制御部15aからの制御による指向方向及び観測タイミングで電磁波または音波を放射して目標までの距離及び角度を観測し、その結果をデータ融合・追尾処理部13aに送出する。データ融合・追尾処理部13aは、その内部の追尾フィルタを拡張カルマンフィルタとし、この追尾フィルタを用いてパッシブセンサ11及びアクティブセンサ12aからの観測結果を融合したデータをフィルタリング処理し、目標の平滑値及び平滑誤差共分散行列、ならびに目標の予測値及び予測誤差共分散行列を含む目標情報を算出する。追尾フィルタの運動モデルは、本実施例においても、例えば等速直線運動としている。また、マニューバ検出部14からのマニューバ段階値に基づいて、システム雑音のレベルが目標の運動モデルに適合するよう制御する。
【0043】
制御部15aは、マニューバ段階値とアクティブセンサ12aの観測時間間隔とをあらかじめ対応付けたテーブルを有し、このテーブルを参照して得た観測時間間隔に基づいて、パッシブセンサ11による目標の観測を継続しつつ、アクティブセンサ12aによる観測タイミングのスケジューリングを行う。このテーブルには、例えば低マニューバに対応したマニューバ段階値に対してはアクティブセンサ12aの観測時間間隔を長く設定し、反対に高マニューバに対しては短い観測時間間隔を設定することによって、自装置の被探知性を低下させつつ、追尾性能の向上を図っている。加えて、データ融合・追尾処理部13aからの目標情報に基づいて、アクティブセンサ12aに対して電磁波または音波の放射方向の制御を行う。
【0044】
次に、図5のフローチャートを参照して、この第2の実施例の複合センサ装置の動作について説明する。はじめに、全体の動作の流れを説明する。
【0045】
まず、制御部15aによるスケジューリングにより、当該観測タイミングでのセンサの選択がなされる(ST501)。ここで、パッシブセンサ11が選択されると、制御部15aからの制御に従ってパッシブセンサ11による目標の角度の観測が行われ、その観測結果がデータ融合・追尾処理部13aに送出される(ST502)。データ融合・追尾処理部13aでは、この観測結果に基づいて追尾フィルタによるフィルタリング処理が実行され、目標の平滑値及び平滑誤差共分散行列が算出される(ST503)。一方、ST501の動作ステップにおいてアクティブセンサ12aが選択されると、センサの指向・放射方向の制御を含む制御部15aからの制御に従ってアクティブセンサ12aによる目標の距離及び角度の観測が行われ、その観測結果がデータ融合・追尾処理部13aに送出される(ST504)。データ融合・追尾処理部13aでは、これら観測結果に基づいてフィルタリング処理により目標の平滑値及び平滑誤差共分散行列が算出される(ST505)。
【0046】
次いで、データ融合・追尾処理部13aで算出されたこれら目標情報と観測値との残差及び残差共分散行列に基づいて、マニューバ検出部14では、目標のマニューバを検出する。そして、その検出結果は、マニューバの程度に応じて複数の段階に区分されたマニューバ段階値として出力される(ST506)。次いで、このマニューバ段階値に基づいて、データ融合・追尾処理部13aでは、内部の追尾フィルタに対して、そのシステム雑音レベルがより目標の運動モデルに適合するように制御を行うとともに、フィルタリング処理が継続されて、目標の予測値及び予測誤差共分散行列が算出される(ST507)。
【0047】
これとあわせ、マニューバ検出部14からのマニューバ段階値は制御部15aにも送出される。制御部15aには、マニューバ段階値とアクティブセンサ12aの観測時間間隔とをあらかじめ対応付けたテーブルが設定されており、制御部15aは、このテーブルを参照してアクティブセンサ12aにより目標の観測を行う観測時間間隔を取得するとともに、パッシブセンサ11による目標の観測を継続しつつ、このテーブルを参照して取得した観測時間間隔でアクティブセンサ12aを動作させるように以降の観測タイミングのスケジューリングがなされる。テーブルには、例えば低マニューバのマニューバ段階値に対しては長い観測時間間隔が設定され、高マニューバに対応したマニューバ段階値に対しては短い観測時間間隔が設定されており、観測を継続する中で検出されたマニューバ段階値の変化に応じてアクティブセンサ12aによる観測頻度を制御し、自装置の被探知性を低下させつつ、追尾性能の向上を図っている。さらに、制御部15aは、データ融合・追尾処理部13aから目標情報を受けとり、これらに基づきアクティブセンサ12aに対して、観測中の目標の方向に電磁波または音波を放射するよう、放射方向の制御を行う。そして、これら観測タイミングのスケジューリング結果及び放射方向の制御情報は、制御部15aからパッシブセンサ11及びアクティブセンサ12aに送出される(ST508)。以降、動作終了まで上述した一連の動作ステップが繰り返される(ST509)。
【0048】
次に、上記した各動作ステップにおける処理内容について詳細に説明する。まず、ST503及びST505のステップでのフィルタリング処理に際して、目標の角度を観測するパッシブセンサ11、ならびに距離及び角度を観測するアクティブセンサ12aからの観測結果を観測値ベースでデータ融合する場合の処理内容について説明する。
【0049】
目標の運動モデルを、以下の式(32)〜式(36)のように定義する。
【数32】
【数33】
【数34】
【数35】
【数36】
【0050】
ここで、xkは、観測時刻tkにおけるx軸の位置pxk、y軸の位置pykとその速度成分からなる状態ベクトル、FkとGkは、観測時刻tkから観測時刻tk+1への遷移行列と駆動行列、wkは、観測時刻tkの平均0、共分散行列Qkのシステム雑音ベクトル、σskは、観測時刻tkにおけるシステム雑音の標準偏差である。また、ATは、ベクトル又は行列Aの転置、Inは、n行n列の単位行列、Onは、n行n列の零行列を示す。
【0051】
パッシブセンサ11の観測モデルを以下の式(37)〜式(39)のように定義する。
【数37】
【数38】
【数39】
【0052】
ここで、ypkは、観測時刻tkのパッシブセンサ11の観測ベクトル、hpk(・)は、観測時刻tkのパッシブセンサ11の観測関数、vpkは、観測時刻tkのパッシブセンサ11の平均0、共分散行列Rpkの観測雑音ベクトルである。
【0053】
アクティブセンサ12aの観測モデルを以下の式(40)〜式(42)ように定義する。
【数40】
【数41】
【数42】
【0054】
ここで、yakは、観測時刻tkのアクティブセンサ12aの観測ベクトル、hak(・)は、観測時刻tkのアクティブセンサ12aの観測関数、vakは、観測時刻tkのアクティブセンサ12aの平均0、共分散行列Rakの観測雑音ベクトルである。
【0055】
ST503の動作ステップでは、パッシブセンサ11からの測角データを用いて、以下の式(43)〜式(48)で表される平滑処理を実施する。
【数43】
【数44】
【数45】
【数46】
【数47】
【数48】
【0056】
ここで、(yチルダ)pkは、観測時刻tkのパッシブセンサ11の残差ベクトル、Hpkは、観測時刻tkのパッシブセンサ11のヤコビアン行列、Spkは、観測時刻tkのパッシブセンサ11の残差共分散行列、Kpkは、観測時刻tkのパッシブセンサ11のカルマンゲイン行列、(xハット)k|kは、観測時刻tkの平滑ベクトル、Pk|kは、観測時刻tkの平滑誤差共分散行列、(xハット)k|k−1は、観測時刻tkの予測ベクトル、Pk|k−1は、観測時刻tkの予測誤差共分散行列である。また、A−1は、行列Aの逆行列を示す。
【0057】
ST505の動作ステップでは、アクティブセンサ12aからの測距・測角データを用いて以下の式(49)〜式(54)で表される平滑処理を実施する。
【数49】
【数50】
【数51】
【数52】
【数53】
【数54】
【0058】
ここで、(yチルダ)akは、観測時刻tkのアクティブセンサ12aの残差ベクトル、Hakは、観測時刻tkのアクティブセンサ12aのヤコビアン行列、Sakは、観測時刻tkのアクティブセンサ12aの残差共分散行列、Kakは、観測時刻tkのアクティブセンサ12aのカルマンゲイン行列である。
【0059】
次に、ST506の動作ステップでのマニューバ検出の際の処理内容について説明する。この動作ステップでは、以下の式(55)〜式(56)により、マニューバ状態を検出し、マニューバ段階値に区分する。
【数55】
【数56】
【0060】
ここで、εkは、観測時刻tkの正規化残差、(yチルダ)p/akは、観測時刻tkのパッシブセンサ11又はアクティブセンサ12aの残差ベクトル、f1(・)は、パッシブセンサ11又はアクティブセンサ12aの残差ベクトルの方位角成分を抽出する関数、Sp/akは、観測時刻tkのパッシブセンサ11又はアクティブセンサ12aの残差共分散行列、f2(・)は、パッシブセンサ11又はアクティブセンサ12aの残差共分散行列の方位角成分を抽出する関数、mkは、観測時刻tkのマニューバ段階値(マニューバ状態)、th1とth2は、マニューバ段階値判定のそれぞれのしきい値であり、th2>th1である。なお、マニューバ段階値の分割数は、上記3つに限定されず、任意の値を選択できる。
【0061】
次に、ST507の動作ステップでの予測処理の処理内容について説明する。この動作ステップでは、以下の式(57)〜式(58)で表される予測処理を実施する。
【数57】
【数58】
【0062】
ここで、(xハット)k+1|kは、観測時刻tk+1の予測ベクトル、Pk+1|kは、観測時刻tk+1の予測誤差共分散行列である。なお、共分散行列Qkは、以下の式(59)を用いると共に、システム雑音の標準偏差σskは、目標のマニューバ状態mkによって変化させる。
【数59】
【0063】
次に、ST508の動作ステップでのスケジューリングの処理内容について説明する。この動作ステップでは、以下の式(60)を満足する場合、アクティブセンサ12aを用いるようにスケジューリングする。
【数60】
【0064】
ここで、takは、最後にアクティブセンサ12aを用いたときの観測時刻、Δt(・)は、マニューバ段階値に対応させてあらかじめ設定されたアクティブセンサ12aの観測時間間隔である。
【0065】
以上説明したように、本実施例においても、第1の実施例と同様に、パッシブセンサ及びアクティブセンサによる目標の観測値を融合し、これを所定の運動モデルに基づき構成された追尾フィルタによりフィルタリング処理を行って、その処理結果と観測値との残差から目標のマニューバを検出し、マニューバ段階値として定量化している。そして、マニューバ段階値とアクティブセンサの観測時間間隔とをあらかじめ対応付けたテーブルに基づいて、パッシブセンサによる目標の観測を継続しつつ、アクティブセンサを使用した観測タイミングのスケジューリングを行っている。このテーブルに設定されたアクティブセンサの観測時間間隔は、低マニューバに対応したマニューバ段階値に対しては広い観測時間間隔が、また、高マニューバに対応したマニューバ段階値に対しては狭い観測時間間隔が設定されている。
【0066】
これにより、第1の実施例と同様に、比較的直線的な運動をしている目標(低マニューバの目標)に対してはアクティブセンサを使用する時間間隔を広くして自装置の被探知性を下げ、かつ低消費電力化するとともに、旋回運動のように激しい動きをしている目標(高マニューバの目標)に対してはアクティブセンサを使用する時間間隔を狭くして、その追尾性能を維持・向上させている。加えて、アクティブセンサに対して、観測中の目標の方向に電磁波または音波を放射するように放射方向の制御を行い、被探知性をより一層低下させるとともに、電力消費を抑制している。従って、被探知性を低下させつつ追尾性能を向上させた、小型かつ低消費電力の複合センサ装置を得ることができる。
【0067】
なお、本発明は、上記した実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、上記実施形態に開示されている複数の構成要素の適宜な組み合せにより種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。さらに、異なる実施形態に亘る構成要素を適宜組み合せてもよい。
【図面の簡単な説明】
【0068】
【図1】本発明に係る複合センサ装置の第1の実施例の構成を示すブロック図。
【図2】図1に例示した本発明に係る複合センサ装置の第1の実施例の動作を説明するためのフローチャート。
【図3】各観測タイミングで使用されるセンサとマニューバ段階値との関係をモデル化して例示した説明図。
【図4】本発明に係る複合センサ装置の第2の実施例の構成を示すブロック図。
【図5】図4に例示した本発明に係る複合センサ装置の第2の実施例の動作を説明するためのフローチャート。
【図6】従来の複合センサ装置の構成の一例を示すブロック図。
【図7】図6に例示した従来の複合センサ装置の動作を説明するためのフローチャート。
【符号の説明】
【0069】
11 パッシブセンサ
12、12a アクティブセンサ
13、13a データ融合・追尾処理部
14 マニューバ検出部
15、15a 制御部
【特許請求の範囲】
【請求項1】
電磁波または音波の放射を伴わずに目標の角度を観測するパッシブセンサと、
電磁波または音波を放射して前記目標までの距離または前記目標までの距離及び角度を観測するアクティブセンサと、
所定の運動モデルに基づき構成された追尾フィルタを有し、前記パッシブセンサによる目標の観測結果と前記アクティブセンサによる目標の観測結果とを観測値レベルで融合したデータから前記目標の平滑値及び平滑誤差共分散行列ならびに予測値及び予測誤差共分散行列を含む目標情報を算出する追尾手段と、
この追尾手段での目標情報の算出時における観測値との残差及び残差共分散行列に基づき前記所定の運動モデルと異なる前記目標の運動をこの目標のマニューバとして検出するとともに、この検出したマニューバの状態をあらかじめ設定された複数のしきい値に対応付けた複数のマニューバ段階値に区分するマニューバ検出手段と、
このマニューバ検出手段からのマニューバ段階値に基づき前記追尾フィルタのシステム雑音のレベルを制御するシステム雑音制御手段と、
前記パッシブセンサによる前記目標の観測を継続しつつ、前記追尾手段からの平滑誤差共分散行列、予測誤差共分散行列、及び前記マニューバ検出手段からのマニューバ段階値の少なくとも1つに基づいて、前記パッシブセンサ及び前記アクティブセンサの観測タイミングのスケジューリングを行うセンサ制御手段と
を有することを特徴とする複合センサ装置。
【請求項2】
前記センサ制御手段は、前記パッシブセンサによる前記目標の観測を継続しつつ、前記追尾手段からの前記目標の平滑誤差共分散行列または予測誤差共分散行列から算出される誤差共分散成分が所定のしきい値を超えた場合、及び前記マニューバ検出手段からの前記目標のマニューバ段階値が変化した場合の少なくとも1つの場合に、前記アクティブセンサにより前記目標の観測を行うようスケジューリングすることを特徴とする請求項1に記載の複合センサ装置。
【請求項3】
前記センサ制御手段は、前記パッシブセンサによる前記目標の観測を継続しつつ、前記マニューバ検出手段からの前記目標のマニューバ段階値に対応付けてあらかじめ設定された前記アクティブセンサの観測時間間隔に基づいて、前記アクティブセンサにより前記目標の観測を行うようスケジューリングすることを特徴とする請求項1に記載の複合センサ装置。
【請求項4】
さらに、前記センサ制御手段は、前記追尾手段からの目標情報に基づいて前記アクティブセンサの電磁波または音波の放射方向を制御するとともに、前記アクティブセンサは、この制御に基づき指定された方向に電磁波または音波を放射することを特徴とする請求項1乃至請求項3のいずれか1項に記載の複合センサ装置。
【請求項1】
電磁波または音波の放射を伴わずに目標の角度を観測するパッシブセンサと、
電磁波または音波を放射して前記目標までの距離または前記目標までの距離及び角度を観測するアクティブセンサと、
所定の運動モデルに基づき構成された追尾フィルタを有し、前記パッシブセンサによる目標の観測結果と前記アクティブセンサによる目標の観測結果とを観測値レベルで融合したデータから前記目標の平滑値及び平滑誤差共分散行列ならびに予測値及び予測誤差共分散行列を含む目標情報を算出する追尾手段と、
この追尾手段での目標情報の算出時における観測値との残差及び残差共分散行列に基づき前記所定の運動モデルと異なる前記目標の運動をこの目標のマニューバとして検出するとともに、この検出したマニューバの状態をあらかじめ設定された複数のしきい値に対応付けた複数のマニューバ段階値に区分するマニューバ検出手段と、
このマニューバ検出手段からのマニューバ段階値に基づき前記追尾フィルタのシステム雑音のレベルを制御するシステム雑音制御手段と、
前記パッシブセンサによる前記目標の観測を継続しつつ、前記追尾手段からの平滑誤差共分散行列、予測誤差共分散行列、及び前記マニューバ検出手段からのマニューバ段階値の少なくとも1つに基づいて、前記パッシブセンサ及び前記アクティブセンサの観測タイミングのスケジューリングを行うセンサ制御手段と
を有することを特徴とする複合センサ装置。
【請求項2】
前記センサ制御手段は、前記パッシブセンサによる前記目標の観測を継続しつつ、前記追尾手段からの前記目標の平滑誤差共分散行列または予測誤差共分散行列から算出される誤差共分散成分が所定のしきい値を超えた場合、及び前記マニューバ検出手段からの前記目標のマニューバ段階値が変化した場合の少なくとも1つの場合に、前記アクティブセンサにより前記目標の観測を行うようスケジューリングすることを特徴とする請求項1に記載の複合センサ装置。
【請求項3】
前記センサ制御手段は、前記パッシブセンサによる前記目標の観測を継続しつつ、前記マニューバ検出手段からの前記目標のマニューバ段階値に対応付けてあらかじめ設定された前記アクティブセンサの観測時間間隔に基づいて、前記アクティブセンサにより前記目標の観測を行うようスケジューリングすることを特徴とする請求項1に記載の複合センサ装置。
【請求項4】
さらに、前記センサ制御手段は、前記追尾手段からの目標情報に基づいて前記アクティブセンサの電磁波または音波の放射方向を制御するとともに、前記アクティブセンサは、この制御に基づき指定された方向に電磁波または音波を放射することを特徴とする請求項1乃至請求項3のいずれか1項に記載の複合センサ装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2010−54284(P2010−54284A)
【公開日】平成22年3月11日(2010.3.11)
【国際特許分類】
【出願番号】特願2008−218350(P2008−218350)
【出願日】平成20年8月27日(2008.8.27)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成22年3月11日(2010.3.11)
【国際特許分類】
【出願日】平成20年8月27日(2008.8.27)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]