
複合誘導装置及び複合誘導方法
【課題】パッシブアンテナ素子のレドームによる影響を軽減し、さらには広い周波数帯での測角を実現する。
【解決手段】飛しょう体における略円筒筐体先端の円形領域の中央に配置され、レドーム11を通じて飛しょう体の正面方向からの電波を受信する第1のパッシブアンテナ素子群A11〜A15と、第1のパッシブアンテナ素子群の素子それぞれの受信信号を用いて目標方向を測角演算するパッシブ処理部17−20と、第1のパッシブアンテナ素子群の周囲に配置され、レドームを通じて飛しょう体正面方向に対して電波を送受信するアクティブアンテナ素子群12と、アクティブアンテナ素子群12の素子それぞれの送受信信号を用いて目標方向を測角演算するアクティブ処理部13〜15と、パッシブ処理部及びアクティブ処理部それぞれで得られる測角演算結果に基づいて飛しょう体を目標方向に誘導する誘導手段16とを具備する。
【解決手段】飛しょう体における略円筒筐体先端の円形領域の中央に配置され、レドーム11を通じて飛しょう体の正面方向からの電波を受信する第1のパッシブアンテナ素子群A11〜A15と、第1のパッシブアンテナ素子群の素子それぞれの受信信号を用いて目標方向を測角演算するパッシブ処理部17−20と、第1のパッシブアンテナ素子群の周囲に配置され、レドームを通じて飛しょう体正面方向に対して電波を送受信するアクティブアンテナ素子群12と、アクティブアンテナ素子群12の素子それぞれの送受信信号を用いて目標方向を測角演算するアクティブ処理部13〜15と、パッシブ処理部及びアクティブ処理部それぞれで得られる測角演算結果に基づいて飛しょう体を目標方向に誘導する誘導手段16とを具備する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、飛しょう体に搭載され、アクティブ方式とパッシブ方式を用いて目標方向を検出し目標を追尾するように飛しょう体を誘導する複合誘導装置及び複合誘導方法に関する。
【背景技術】
【0002】
飛しょう体に搭載され目標方向を検出して目標を追跡させる誘導装置においては、自ら電波を照射して目標から反射してくる反射波を検出して目標を追跡するアクティブ方式と、目標が放射する電波を検出して追跡するパッシブ方式がある。アクティブ方式においては、位相モノパルス方式による測角方式が多く採用され、パッシブ方式においては、広範囲にわたる周波数帯で受信可能なアンテナ素子により、振幅モノパルス、位相モノパルス、インターフェロメータ等による測角方式が採用されている。
【0003】
近年、目標を追跡する精度を向上させるために、アクティブ方式とパッシブ方式の両方式を有する複合誘導装置が研究されつつある。こうした状況のもと、飛しょう体等の限られたスペースで、広い周波数帯にわたって、高い精度で目標方向を検出できるパッシブ方式の実現が必要となってきている。
【0004】
飛しょう体に搭載する複合誘導装置において、目標の測角を実現する方式には、特許文献1のような方法がある。その方法は、飛しょう体先端の円形の領域にアンテナ素子を配置するに際し、アンテナ面中央にアクティブ用のアンテナを配置し、その周囲にパッシブアンテナを配置するようにしている。
【0005】
上記の方式では、広帯域の電波を受信するパッシブアンテナが飛しょう体先頭のレドーム沿いに配置される。ところが、超音速で飛しょうするような飛しょう体では、レドーム形状が尖頭形状となり、レドーム通過による電波特性の歪等が大きく、特にレドームに近接して周辺に配置したパッシブアンテナはその影響を大きく受け、その結果、目標の測角精度が低下する。また、搭載スペースに制約もあり、アンテナ素子とその後段の受信機数も制約を受け、なるべく少ないアンテナ素子数での実現が必要となる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平08-5734号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
上述の如く、従来のアクティブ方式とパッシブ方式を採用する飛しょう体搭載の複合誘導装置では、広帯域の電波を受信するパッシブアンテナが飛しょう体先頭のレドーム沿いに配置されるが、飛しょう体のレドーム形状が尖頭形状の場合には、レドーム通過による電波特性の歪等が大きく、特にレドームに近接して周辺に配置したパッシブアンテナはその影響を大きく受け、その結果、目標の測角精度が低下する。また、搭載スペースに制約もあり、アンテナ素子とその後段の受信機数も制約を受け、なるべく少ないアンテナ素子数での実現が必要となる。
【0008】
本発明は上記事情を考慮してなされたもので、パッシブアンテナ素子のレドームによる影響を軽減することができ、さらには広い周波数帯でのインターフェロメータでの測角を実現することができ、また広角度からの電波入射を除去することのできる複合誘導装置及び複合誘導方法を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記目的を達成するために、本発明に係る複合誘導装置は、以下のように構成される。
【0010】
(1)アクティブ方式とパッシブ方式を採用する飛しょう体搭載の複合誘導装置において、前記飛しょう体における略円筒筐体先端の円形領域の中央に配置され、前記レドームを通じて前記飛しょう体正面方向からの電波を受信する第1のパッシブアンテナ素子群と、前記第1のパッシブアンテナ素子群の素子それぞれの受信信号を用いて目標方向を測角演算するパッシブ処理部と、前記第1のパッシブアンテナ素子群の周囲に配置され、前記レドームを通じて前記飛しょう体正面方向に対して電波を送受信するアクティブアンテナ素子群と、前記アクティブアンテナ素子群の素子それぞれの送受信信号を用いて目標方向を測角演算するアクティブ処理部と、前記パッシブ処理部及びアクティブ処理部それぞれで得られる測角演算結果に基づいて前記飛しょう体を前記目標方向に誘導する誘導手段とを具備する態様とする。
【0011】
(2)(1)の構成において、前記第1のパッシブアンテナ素子群は、測角方向について不均等に配置されて互いに間隔が異なる複数の素子を備え、前記パッシブ処理部は、観測する周波数帯に応じて前記配列間隔が異なる複数の素子の受信信号を切り換え選択して複数の素子間隔でインターフェロメータ測角を行う態様とする。
【0012】
(3)(1)の構成において、さらに、前記略円筒筐体の側面に周面に沿って配置され、前記第1のパッシブアンテナ素子群の観測測角範囲より広角の電波を受信する第2のパッシブアンテナ素子群を備え、パッシブ処理部は、前記第2のパッシブアンテナ素子群の各素子における受信信号の振幅のいずれかが前記第1のパッシブアンテナ素子群の受信信号の振幅値を越えるときは、前記測角演算結果を廃棄する態様とする。
【0013】
(4)(3)の構成において、前記パッシブ処理部は、前記第2のパッシブアンテナ素子群の各素子における受信信号の振幅値から入射する電波のゾーンを判定し、電波特性の変化に応じて前記第2のパッシブアンテナ素子群による廃棄範囲を調整する態様とする。
【0014】
また、本発明に係る複合誘導方法は、以下のように構成される。
【0015】
(5)アクティブ方式とパッシブ方式を採用する飛しょう体の複合誘導方法において、前記飛しょう体における略円筒筐体先端の円形領域の中央に沿って、前記レドームを通じて前記飛しょう体正面方向からの電波を受信する第1のパッシブアンテナ素子群を配置し、前記第1のパッシブアンテナ素子群の素子それぞれの受信信号を用いて目標方向を測角演算するパッシブ処理を実行し、前記第1のパッシブアンテナ素子群の周囲に、前記レドームを通じて前記飛しょう体正面方向に対して電波を送受信するアクティブアンテナ素子群を配置し、前記アクティブアンテナ素子群の素子それぞれの送受信信号を用いて目標方向を測角演算するアクティブ処理を実行し、前記パッシブ処理及びアクティブ処理それぞれで得られる測角演算結果に基づいて前記飛しょう体を前記目標方向に誘導する態様とする。
【0016】
(6)(5)の構成において、前記第1のパッシブアンテナ素子群は、測角方向について複数の素子を互いに間隔が異なるように不均等に配置し、前記パッシブ処理は、観測する周波数帯に応じて前記配列間隔が異なる複数の素子の受信信号を切り換え選択して複数の素子間隔でインターフェロメータ測角を行う態様とする。
【0017】
(7)(5)の構成において、さらに、前記略円筒筐体の側面に周面に沿って、前記第1のパッシブアンテナ素子群の観測測角範囲より広角の電波を受信する第2のパッシブアンテナ素子群を配置し、パッシブ処理は、前記第2のパッシブアンテナ素子群の各素子における受信信号の振幅のいずれかが前記第1のパッシブアンテナ素子群の受信信号の振幅値を越えるときは、前記測角演算結果を廃棄する態様とする。
【0018】
(8)(7)の構成において、前記パッシブ処理部、前記第2のパッシブアンテナ素子群の各素子における受信信号の振幅値から入射する電波のゾーンを判定し、電波特性の変化に応じて前記第2のパッシブアンテナ素子群による廃棄範囲を調整する態様とする。
【発明の効果】
【0019】
本発明によれば、パッシブアンテナ素子のレドームによる影響を軽減することができ、さらには広い周波数帯でのインターフェロメータでの測角を実現することができ、また広角度からの電波入射を除去することのできる複合誘導装置及び複合誘導方法を提供すること誘導装置を提供することができる。
【図面の簡単な説明】
【0020】
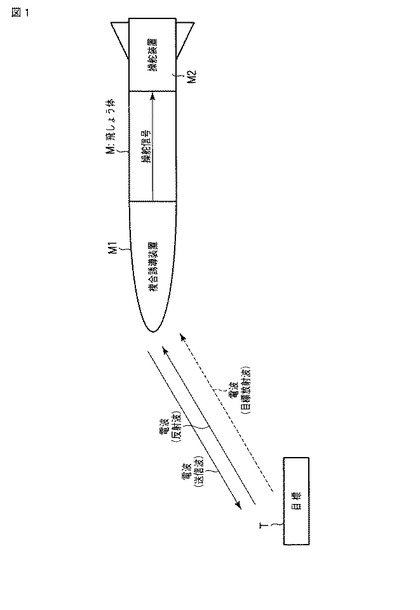
【図1】本発明に係る複合誘導装置が適用される飛しょう体の全体構成、及び、複合誘導装置と目標との関係を示す概略構成図。
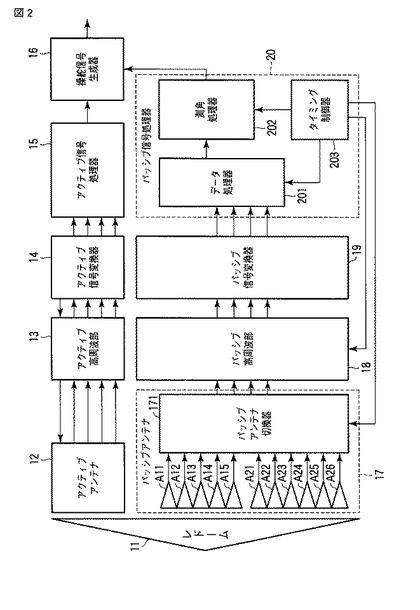
【図2】図1に示す複合誘導装置の構成を示すブロック図。
【図3】図2に示すアクティブアンテナとパッシブアンテナを構成するアンテナ素子の詳細配置について、正面から見た場合の配置を示す図。
【図4】図2に示すアクティブアンテナとパッシブアンテナを構成するアンテナ素子の詳細配置について、左側面、右側面から見た場合の配置を示す図。
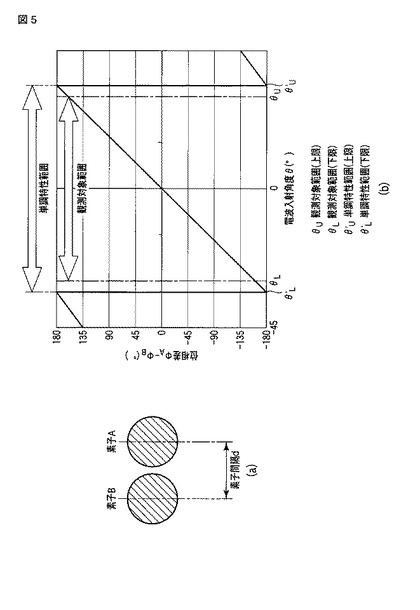
【図5】図2に示す正面に配置した第1群のアンテナ素子による測角方式として採用するインターフェロメータ方式について説明するための図。
【図6】上記実施形態において、観測周波数帯毎にインターフェロメータを実施するアンテナ素子を切換えたとき、測角値(θ)の精度低下を防ぐためのアンテナ素子配置を示す図。
【図7】上記実施形態において、複数の観測周波数帯のそれぞれと測角精度を確保する素子間隔との関係を示す図。
【図8】上記実施形態において、アンテナ素子の配置関係と判定区分との関係を示す図。
【図9】上記実施形態の例として、方位角方向に並ぶアンテナ素子それぞれの電波到来角度に対する振幅特性と単調特性範囲及び広角判定範囲を示す図。
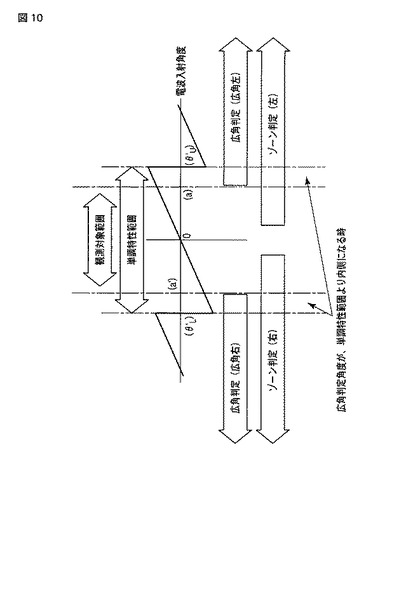
【図10】上記実施形態の例として、単調特性範囲、広角判定範囲及びゾーン判定範囲それぞれの関係において、広角判定角度が単調特性範囲より内側になる場合を説明するための図。
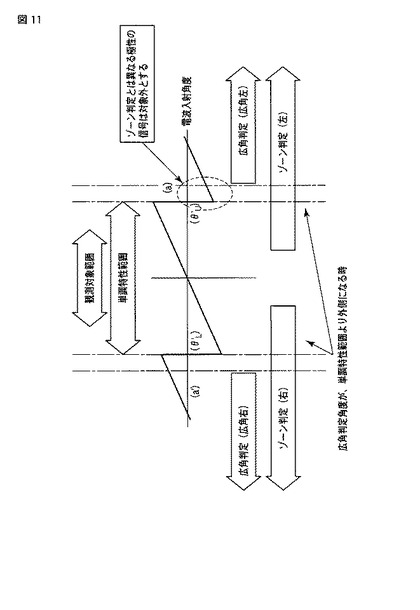
【図11】上記実施形態の例として、単調特性範囲と広角判定範囲及びゾーン判定範囲それぞれの関係において、広角判定角度が単調特性範囲より外側になる場合を説明するための図。
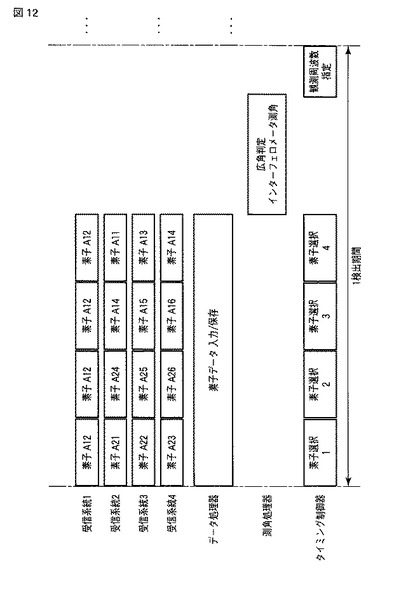
【図12】上記実施形態において、複合誘導装置の1検出期間における主要部それぞれの処理タイミングを示す図。
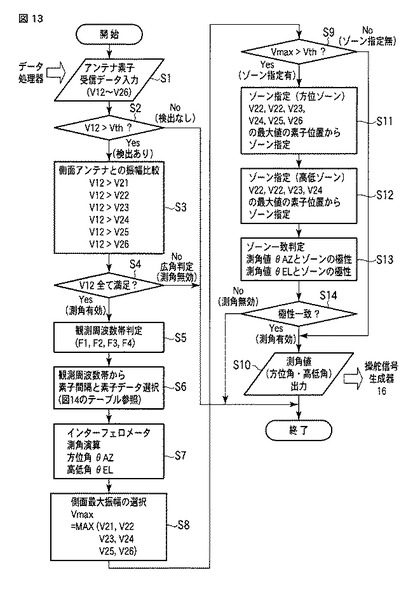
【図13】上記実施形態において、パッシブ信号処理器における測角処理器の処理の流れを示すフローチャート。
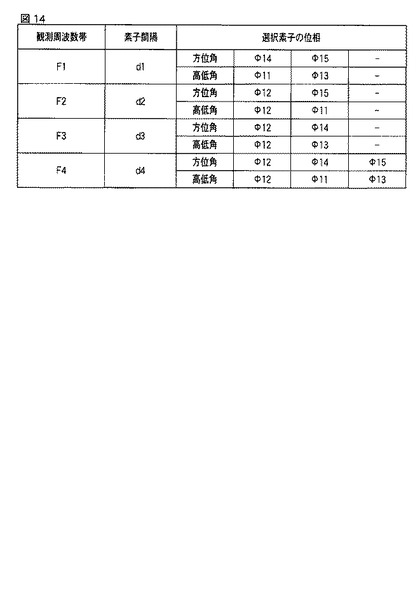
【図14】上記実施形態において、観測周波数帯、素子間隔、選択素子の位相(Φの添え字はアンテナ素子の符号に対応)の関係をまとめたテーブルを示す図。
【発明を実施するための形態】
【0021】
以下、図面を参照して本発明の実施の形態を詳細に説明する。
【0022】
図1は本発明の一実施形態として、本発明に係る複合誘導装置が適用される飛しょう体の全体構成、及び、複合誘導装置と目標との関係を示す概略構成図である。図1において、Tは移動目標、Mは飛しょう体であり、飛しょう体Mは、複合誘導装置M1及び操舵装置M2を搭載している。
【0023】
複合誘導装置M1は、本発明の一実施形態を示す装置であり、移動目標Tに対して電波を照射(送信波)して目標Tから反射して戻ってくる電波(受信波)を検出し追跡する機能(アクティブ機能)と、移動目標Tが放射する電波(目標放射波)を検出し追跡する機能(パッシブ機能)とを有し、検出した移動目標Tを追跡するための操舵信号を出力する。
【0024】
操舵装置M2は複合誘導装置M1からの操舵信号をもとに、飛しょう体Mが目標方向に飛しょうするための操舵を実施する。
【0025】
図2は、上記複合誘導装置M1の構成を示すブロック図である。複合誘導装置M1の先端にはレドーム11が装着される。レドーム11は飛しょう体M1が高速で飛しょうする故に生じる空力的抗力を低減する形状(尖頭形状等)を有するとともに、空力的な圧力から内部器材を保護し、さらに、移動目標Tからの電波を広い周波数帯域で透過することができる材質が選定される。
【0026】
図2に示す上段はアクティブ機能を実現する系統(以下、アクティブ系装置)であり、アクティブアンテナ12、アクティブ高周波部13、アクティブ信号変換器14、アクティブ信号処理器15から成る。
【0027】
上記アクティブ系装置では、図示しない信号源から発生される送信信号をアクティブ信号変換器14で高周波に変換し、アクティブ高周波部15で電力増幅して、アクティブアンテナ12から移動目標Tに向けて送出する。
【0028】
また、移動目標Tから反射して戻ってくる電波をアクティブアンテナ12で受信し、高周波部13で低雑音増幅して、アクティブ信号変換器14でベースバンドに戻し、アクティブ信号処理器15に送る。
【0029】
上記アクティブ信号処理器15は、受信信号からクラッタ成分を除去して目標信号を検出し、その検出結果から移動目標Tの方向を演算出力する。これによって求められた目標方向は操舵信号生成器16に送られる。
【0030】
一方、図2に示す下段はパッシブ機能を実現する系統(以下、パッシブ系装置)であり、パッシブアンテナ17、パッシブ高周波部18、パッシブ信号変換器19、パッシブ信号処理器20から成る。パッシブアンテナ17は、目標Tが放射する多種の電波を受信できるよう広帯域受信特性を有する第1群のパッシブアンテナ素子A11〜A15と第2群のパッシブアンテナ素子A21〜A26とから成る。パッシブ信号処理器20は、データ処理器201、測角処理器202、タイミング制御器203から成る。第1群のパッシブアンテナ素子A11〜A15は移動目標Tの検出、測角を実施し、第2群のパッシブアンテナ素子A21〜A26は、観測対象範囲とされる角度よりも外側からの広角度で入射される電波を除去することを目的とする。
【0031】
なお、複合誘導装置M1は飛しょう体Mへの搭載から実装スペースが限定され、同時に電波を受信する系統数が限定されるため、図2のパッシブ高周波部18、パッシブ信号変換器19は4系統を有するものとした。したがって、パッシブアンテナ素子A11〜A15,A21〜A26からの受信信号は、受信系統数に合わせて4素子分の出力が得られるように、スイッチ等によるパッシブアンテナ切換器171により、内部で切換制御を実施するようにしている。
【0032】
但し、受信系統数は4に限定されるものではなく、器材実装スペースに応じて増減することは可能である。
【0033】
上記パッシブ高周波部18とパッシブ信号変換器19によりデジタル信号処理可能な形態に変換された信号は、パッシブ信号処理器20に入り、データ処理器201でAD変換等をされメモリ等に保存された後、測角処理器202で移動目標Tを検出、測角するための処理を実施し、移動目標Tの測角値(方向)を操舵信号生成器16に出力する。操舵信号生成器16では、アクティブ信号処理器15とパッシブ信号処理器20の双方から得られた移動目標Tの方向に関する情報を統合して、飛しょう体Mが移動目標Tを追跡するための操舵指令信号を生成し、操舵装置M2へ出力する。
【0034】
図3及び図4にアクティブアンテナ12と、パッシブアンテナ17を構成するアンテナ素子A11〜A15,A21〜A26の詳細配置を示す。図3は正面から見た場合、図4(a)は左側面、図4(b)は右側面から見た場合の配置を示している。これらのアンテナ12及びアンテナ素子A11〜A15,A21〜A26は、移動目標Tの検出と測角を目的として、飛しょう体Mの円筒形状の筐体における先端に配置されるため、図中の円形範囲それぞれの中に配置される。
【0035】
この点について、従来技術では、アクティブアンテナ12を優先的に中央に配置して、パッシブアンテナ17をその周囲に配置していた(特許文献1)。しかし、レドーム11を通過した電波を広帯域で受信する場合、レドーム11が空力的な配慮から尖頭形状等の特殊な形状となるため、パッシブアンテナ17をアクティブアンテナ12の周囲に配置してしまうと、レドーム11により電波の振幅、位相特性の歪が大きく、広帯域にわたって高い精度で移動目標Tの測角を実現するのは困難である。
【0036】
これを解決するために、本実施形態では、パッシブアンテナ17のうち、移動目標Tの検出と測角を行う第1群のアンテナ素子A11〜A15を、それぞれレドーム11の歪の影響が広帯域にわたって少ない中央に優先的に配置し、その周囲にアクティブアンテナ12を配置する。一般に、アクティブアンテナ12は自らの送信波の周波数帯域に合わせた狭帯域での対応で済むため、レドーム11の影響があっても最適な調整が可能である。
【0037】
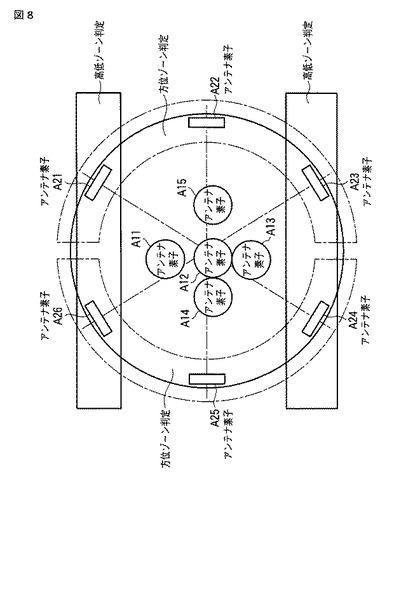
一方、パッシブアンテナ17のうち、第2群のアンテナ素子A21〜A26は、飛しょう体Mの筐体内側面に、ほぼ等間隔に6箇所に配置する。このようにして、正面に配置した第1群のアンテナ素子A11〜A15によって目標測角を実施する際に、観測対象範囲とされる角度よりも広角度で入射してくる電波を第2群のアンテナ素子A21〜A26で検出し、観測対象範囲外の角度から入射される電波の受信信号であるものとして除去することで、誤った目標測角を回避する。
【0038】
ここで、図5を参照して、正面に配置した第1群のアンテナ素子A11〜A15による測角方式として採用するインターフェロメータ方式について説明する。
【0039】
このインターフェロメータ方式では、図5(a)に示す2つのアンテナ素子A,Bで同時に受信した電波の位相ΦA,ΦBを使用して、両素子A,B間の位相差ΦA-ΦBから、受信した電波の入射角度(目標の測角値)θを次式から算出する。
sinθ=(ΦA-ΦB)・C/(2π・F・d)…(1)
C:光速、F:電波周波数
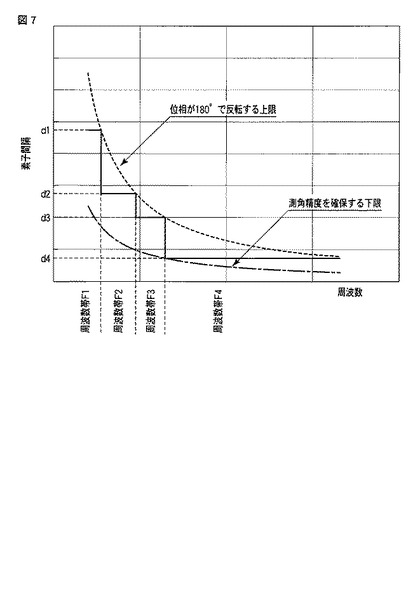
このとき、電波の位相は、図5(b)に示すように、±180°で周期性を有することから、インターフェロメータ方式で得られる測角値は、観測対象の電波の周波数(F)と素子間隔(d)で決まる周期性を有する。
【0040】
従来は、この周期性を回避して観測したい角度範囲の中で単調性を確保するために、観測したい最大周波数に合わせて素子間隔(d)を設定した。しかし、この場合には観測周波数(F)が低くなるにつれて、インターフェロメータ方式で得られる測角値(θ)の精度が低下する問題がある。
【0041】
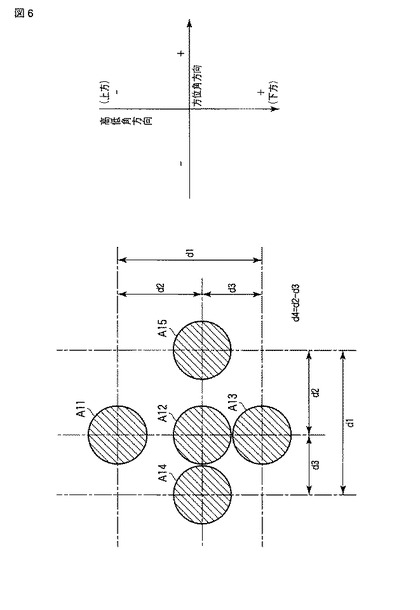
これを解決するために、本実施形態では、観測周波数帯毎にインターフェロメータを実施するアンテナ素子を切換えて、測角値(θ)の精度低下を防ぐ素子配置とする。アンテナ素子A11〜A15の詳細配置を図6に示す。
【0042】
図6において、アンテナ素子A11,A12,A13は、飛しょう体Mの飛しょう姿勢における高低角方向(紙面縦方向)の同一軸上に配置され、高低角方向のインターフェロメータ測角に用いられる。アンテナ素子A11,A12の素子間隔はd2、アンテナ素子A12,A13の素子間隔はd3とし、d2>d3とする。
【0043】
ここで、F1〜F4の各観測周波数帯で使用する素子間隔が適切になるように使用素子を選択することにより、インターフェロメータ測角における精度を確保する。図7に観測周波数帯F1〜F4のそれぞれと測角精度を確保する素子間隔との関係を示す。
【0044】
すなわち、観測対象とする最も低い周波数帯F1では、アンテナ素子A11−A13による素子間隔d1(=d2+d3)でインターフェロメータ測角を実施し、次の周波数帯F2ではアンテナ素子A11−A12の素子間隔d2でインターフェロメータ測角を実施し、次の周波数帯F3はアンテナ素子A13−A12の素子間隔d3でインターフェロメータ測角を実施し、最も高い周波数帯F4ではアンテナ素子A11,A12,A13の3素子を使用して素子間隔d4(=d2−d3)でインターフェロメータ測角を実施する。
【0045】
一方、アンテナ素子A14,A12,A15は、飛しょう体Mの飛しょう姿勢における方位角方向(紙面横方向)の同一軸上に配置され、方位角方向のインターフェロメータ測角に用いられる。アンテナ素子A15−A12の素子間隔はd2、アンテナ素子A12−A14の素子間隔はd3とし、d2>d3とする。
【0046】
ここで、高低角方向の測角と同様に、観測対象とする最も低い周波数帯F1では、アンテナ素子A14−A15による素子間隔d1(=d2+d3)でインターフェロメータ測角を実施し、次の周波数帯F2ではアンテナ素子A15−A12の素子間隔d2でインターフェロメータ測角を実施し、次の周波数帯F3ではアンテナ素子A14−A12の素子間隔d3でインターフェロメータ測角を実施し、最も高い周波数帯F4ではアンテナ素子A14,A12,A15の3素子を使用して素子間隔d4(=d2−d3)でインターフェロメータ測角を実施する。
【0047】
続いて、図8乃至図11を参照して、側面に配置したアンテナ素子A21〜A26による広角除去について説明する。
【0048】
インターフェロメータ測角では、周期性が必ず生じるため、観測対象角度範囲で単調性を確保しても、さらにその外側から入射する電波に対しては誤った角度検出をすることになる。したがって、観測対象範囲外から入射する電波を確実に除去する必要がある。以下、この処理を「広角除去」と称する。
【0049】
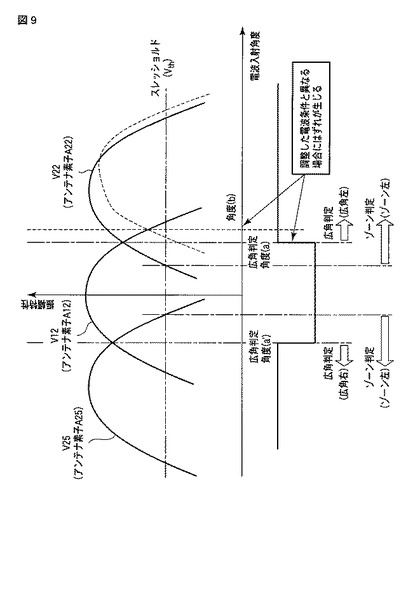
図8は各アンテナ素子A11〜A15,A21〜A26の配置関係と判定区分との関係を示す図、図9は例として方位角方向に並ぶアンテナ素子それぞれの電波到来角度に対する振幅特性と単調特性範囲及び広角判定範囲を示す図、図10は単調特性範囲と広角判定範囲及びゾーン判定範囲との関係において、広角判定角度が単調特性範囲より内側になる場合を説明するための図、図11は単調特性範囲と広角判定範囲及びゾーン判定範囲との関係において、広角判定角度が単調特性範囲より外側になる場合を説明するための図である。
【0050】
広角除去においては、図8に示す各アンテナ素子の配置において、例えば図9(方位方向の場合)に示すように、正面中央に配置したアンテナ素子A12、側面に配置したアンテナ素子A21〜A26(図9ではA22,A25)それぞれの受信信号の振幅レベルを比較して、側面に配置したアンテナ素子A21〜A26での振幅レベル全てよりも、正面アンテナ素子A12の振幅の方が大きいときに観測対象範囲外からの電波入射ではないと判定して測角処理を実施する。言い換えると、アンテナ素子A21〜A26でのいずれかの振幅レベルが、アンテナ素子A12の振幅レベルより大きいときは、観測対象範囲よりも外側からの電波入射と判定(広角判定)して、測角処理は実施しない。
【0051】
広角判定を実現するためには、アンテナ素子A21〜A26とアンテナ素子A12の振幅は、例えば図9に示すように、観測対象範囲外と判定する角度(a及びa′)で振幅特性が交差するように事前調整される。事前調整では、図10に示すように、観測対象範囲外と判定する角度範囲(a′以下、a以上)を、インターフェロメータ測角で単調性を確保する範囲(θL′からθU′)と重ねることで、インターフェロメータ測角での単調性は確保され、測角は可能となる。
【0052】
しかしながら、受信する電波の特性(例えば偏波の違い)が調整した電波条件と異なる場合には、例えばアンテナ素子A22の振幅特性V22が図9中点線で示すような特性となり、観測対象範囲外を判定するために調整した角度がずれる場合がある。特にこの角度が外側にずれた場合には、図中の点線内の角度範囲のように、観測対象内と判定されてもインターフェロメータの測角の単調性が確保されない角度範囲が生じ、この方向からの電波入射があった場合には誤った測角をしてしまう。
【0053】
こうした状況を回避するために、広角判定による観測対象の範囲内か否かの判定に加えて、図8に示すように、電波入射方向(方位方向と高低方向)のゾーン判定を実施する。ゾーン判定は、例えば図9に示すように、アンテナ素子A21〜A26(図9ではA22,A25)の範囲で受信した電波の振幅のうちスレッショルドVthを越えているものがある場合、そのアンテナ素子の位置から、入射している電波のゾーン、すなわち、方位方向の左ゾーンまたは右ゾーン、高低方向の上ゾーンまたは下ゾーンを判定する。
【0054】
さらに、方位角方向(左または右)、高低角方向(上または下)のゾーン極性を、インターフェロメータ測角による方位角方向、高低角方向の測角値の極性を一致させるように事前調整をしておく。
【0055】
これにより、図11の点線付近の角度範囲に示すように、観測対象外として調整した広角判定角度がずれて、インターフェロメータ測角の周期性から誤った測角を行う状況が生じても、ゾーン判定と測角値の極性一致を判定することで、誤って測角する状況を回避することができる。
【0056】
続いて、図12及び図13を参照して本実施形態の処理動作を説明する。
【0057】
図12は複合誘導装置M1の1検出期間における主要部それぞれの処理タイミングを示す図、図13はパッシブ信号処理器20における測角処理器202の処理の流れを示すフローチャートである。
【0058】
タイミング制御器203は、パッシブアンテナ切換器171に制御信号を出力して、1検出期間の中を図12に示すタイミングでパッシブアンテナ素子A11〜A15,A21〜A26を4つの受信系統に順次割り当てる。パッシブアンテナ切換器171は制御信号をもとに内蔵するスイッチ等を切換えて、使用するパッシブアンテナ素子を選択する。4つの受信系統で選択されたパッシブアンテナ素子の受信信号は、パッシブ高周波部18で低雑音増幅され、パッシブ信号変換器19でベースバンドに変換された後、データ処理器201でAD変換されてメモリに保存される。1検出期間の最後に、タイミング制御器203は観測周波数帯をパッシブ高周波部18に指定し、次の検出期間で観測する周波数を切り換えていく。
【0059】
尚、観測する周波数の切換幅等は、先の周波数帯F1〜F4とは独立に設定可能であり、後述の図13に示すように、インターフェロメータの測角処理は観測する周波数が周波数帯F1〜F4のいずれに含まれているかを判定することで実施される。
【0060】
測角処理器202は、図13に示すフローチャートに従って、1検出期間毎に広角判定とインターフェロメータによる測角演算を実施する。図13において、データ処理器201から、保存された4つの受信系統それぞれの全てのアンテナ素子受信データ(振幅V・位相Φ)を入力する(ステップS1)。まず、正面のほぼ中心に位置するアンテナ素子A12の振幅値(V12)が目標検出に必要なスレッショルドレベル(Vth)以上であるかを判定する(ステップS2)。スレッショルドレベル以下である場合には「検出なし」として処理を終了する。スレッショルドレベル以上である場合には、「検出あり」として測角のための次のステップに移行する。
【0061】
次に、アンテナ素子A12での振幅値(V12)と、側面に配置されている6個のアンテナ素子A21〜A26との振幅値(V21〜V26)を比較し(ステップS3)、アンテナ素子A12の振幅値(V12)が(V21〜V26)のいずれよりも大きいか否かを判定する(ステップS4)。V12>V21〜V26の場合には、観測対象範囲とされる正面方向からの受信であると判定して測角演算へ移行する。側面のアンテナ素子A21〜A26の振幅値(V21〜V26)のいずれかがアンテナ素子A12の振幅値(V12)より大きい場合には、観測対象範囲よりも外側からの電波入射と判定(広角判定)して一連の処理を終了する。
【0062】
次に、測角演算においては、観測している周波数が観測周波数帯F1〜F4のいずれにあるかを判定し(ステップS5)、観測周波数帯から定まる素子間隔とそれに対応するアンテナ素子の受信データ(各素子の位相Φ)を選択して(ステップS6)、インターフェロメータ原理に基づく測角演算(図5)を実施する(ステップS7)。ステップS6の処理は、例えば図14に示す観測周波数帯、素子間隔、選択素子の位相(Φの添え字はアンテナ素子の符号に対応)の関係をまとめたテーブルを参照してそれぞれの諸元を選択する。ステップS7の測角演算では、(1)式を用いて、方位角方向と高低角方向の各々について測角値(θAZ,θEL)を算出する。
【0063】
この時点で、側面アンテナ素子A21〜A26の振幅値(V21〜V26)がスレッショルドレベル(Vth)以上かを判定し、いずれもスレッショルドレベル以下であれば観測対象範囲内であり測角演算は有効と判定し、そのまま測角演算で得られた測角値(θAZ,θEL)を操舵信号生成器16へ出力する。一方、側面アンテナ素子A21〜A26の振幅値(V21〜V26)のいずれかがスレッショルドレベルを越えている場合には、観測対象範囲内の周辺領域である可能性があるため、ゾーン判定のステップへ移行する。
【0064】
具体的に説明すると、ステップS7の処理が終了した時点で、側面に配置された第2群のアンテナ素子A21〜A26それぞれの振幅値V21〜V26のうち最大の振幅値Vmaxを選択する(ステップS8)。ここで、最大振幅値Vmaxがスレッショルドレベルを越えたか否かを判断し(ステップS9)、越えていなければ受信電波は観測対象内と判断し、ゾーンを指定することなくステップS7で求めた方位角・高低角それぞれの測角値を出力して(ステップS10)、一連の処理を終了する。スレッショルドレベルを越えていた場合には、以下に述べるゾーンの指定処理に移行する。
【0065】
上記ゾーンの指定処理では、まず側面アンテナ素子A21〜A26それぞれの受信信号の振幅値V21〜V26のうち最大値が得られたアンテナ素子を選択し、図8に示されるように、そのアンテナ素子の位置から方位方向のゾーン指定を実施する(ステップS11)。また側面アンテナ素子A21,A23,A24,A26それぞれの受信信号の振幅値V21,V23,V34,V26のうち最大値が得られたアンテナ素子を選択し、図8に示されるように、そのアンテナ素子の位置から高低方向のゾーン指定を実施する(ステップS12)。
【0066】
次に、測角演算で得られた高低角と方位角の測角値の極性、ゾーン指定領域で得られた極性それぞれの情報を取得し(ステップS13)、方位角の測角値θAZの極性と方位方向のゾーンの極性、高低角の測角値θELの極性と高低方向のゾーンの極性それぞれを比較する(ステップS14)。この判定において、共に一致していれば観測対象内で測角演算は有効と判定してステップS10に移行し、ステップS7で求めた方位角・高低角それぞれの測角値(θAZ,θEL)を操舵信号生成器16へ出力して一連の処理を終了する。一方、いずれかが一致しない場合には、インターフェロメータ方式で誤って測角している範囲である可能性が高いため、無効データとして処理を終了する。
【0067】
上記構成による複合誘導装置では、第1群のパッシブアンテナ素子A11〜A15を優先して正面中央に集中して配置している。これにより、レドーム11の影響が少なく、広帯域で受信信号が得られる。また、パッシブアンテナによる測角方式はインターフェロメータ方式として、計5個のアンテナ素子A11〜A15を不等間隔に配置して、方位、高低角方向ともに4種類の素子間隔d1〜d4でインターフェロメータ測角を実現し、観測する周波数帯F1〜F4に応じて観測するアンテナ素子を切換えることで、インターフェロメータ測角における素子間隔を変えるようにしている。これにより広い周波数帯でのインターフェロメータでの測角を精度よく実現することができる。
【0068】
一方、飛しょう体Mの側面に、周囲6方向に指向するように第2群のパッシブアンテナ素子A21〜A26を配置し、各アンテナ素子A21〜A26の受信信号の振幅値からインターフェロメータの測角が困難となる広角度からの電波入射を判別し、適宜、測角演算結果を廃棄するようにしている。これにより、観測対象範囲からの電波による測角精度を向上させることができる。さらに、偏波等の電波特性が変化し除去可能な範囲が変動しても、入射する電波のゾーン(高低角方向、方位角方向)等も判定するようにしている。これにより、誤った測角を実施した場合にそれを排除することができる。
【0069】
尚、上記実施形態では、同時に観測する受信系統を4系統としたが、実装規模によっては、任意の系統数にも適用可能である。いずれの場合も、処理タイミングによって観測形態の数を変えることで対応可能である。また、測角する方向についても、高低角、方位角の2方向に限ることなく、1方向の場合にはより簡略された形態での実現が可能である。
【0070】
また、本発明は上記実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、本発明によれば、上記実施形態に開示されている複数の構成要素の適宜な組み合わせにより、種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。さらに、異なる実施形態にわたる構成要素を適宜組み合わせてもよい。
【符号の説明】
【0071】
T…移動目標、M…飛しょう体、M1…複合誘導装置、M2…操舵装置、11…レドーム、12…アクティブアンテナ、13…アクティブ高周波部、14…アクティブ信号変換部、15…アクティブ信号処理器、16…操舵信号生成器、17…パッシブアンテナ切換器、18…パッシブ高周波部、19…パッシブ信号変換器、20…パッシブ信号変換器、201…データ処理器、202…測角処理器、203…タイミング制御器。
【技術分野】
【0001】
本発明は、飛しょう体に搭載され、アクティブ方式とパッシブ方式を用いて目標方向を検出し目標を追尾するように飛しょう体を誘導する複合誘導装置及び複合誘導方法に関する。
【背景技術】
【0002】
飛しょう体に搭載され目標方向を検出して目標を追跡させる誘導装置においては、自ら電波を照射して目標から反射してくる反射波を検出して目標を追跡するアクティブ方式と、目標が放射する電波を検出して追跡するパッシブ方式がある。アクティブ方式においては、位相モノパルス方式による測角方式が多く採用され、パッシブ方式においては、広範囲にわたる周波数帯で受信可能なアンテナ素子により、振幅モノパルス、位相モノパルス、インターフェロメータ等による測角方式が採用されている。
【0003】
近年、目標を追跡する精度を向上させるために、アクティブ方式とパッシブ方式の両方式を有する複合誘導装置が研究されつつある。こうした状況のもと、飛しょう体等の限られたスペースで、広い周波数帯にわたって、高い精度で目標方向を検出できるパッシブ方式の実現が必要となってきている。
【0004】
飛しょう体に搭載する複合誘導装置において、目標の測角を実現する方式には、特許文献1のような方法がある。その方法は、飛しょう体先端の円形の領域にアンテナ素子を配置するに際し、アンテナ面中央にアクティブ用のアンテナを配置し、その周囲にパッシブアンテナを配置するようにしている。
【0005】
上記の方式では、広帯域の電波を受信するパッシブアンテナが飛しょう体先頭のレドーム沿いに配置される。ところが、超音速で飛しょうするような飛しょう体では、レドーム形状が尖頭形状となり、レドーム通過による電波特性の歪等が大きく、特にレドームに近接して周辺に配置したパッシブアンテナはその影響を大きく受け、その結果、目標の測角精度が低下する。また、搭載スペースに制約もあり、アンテナ素子とその後段の受信機数も制約を受け、なるべく少ないアンテナ素子数での実現が必要となる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平08-5734号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
上述の如く、従来のアクティブ方式とパッシブ方式を採用する飛しょう体搭載の複合誘導装置では、広帯域の電波を受信するパッシブアンテナが飛しょう体先頭のレドーム沿いに配置されるが、飛しょう体のレドーム形状が尖頭形状の場合には、レドーム通過による電波特性の歪等が大きく、特にレドームに近接して周辺に配置したパッシブアンテナはその影響を大きく受け、その結果、目標の測角精度が低下する。また、搭載スペースに制約もあり、アンテナ素子とその後段の受信機数も制約を受け、なるべく少ないアンテナ素子数での実現が必要となる。
【0008】
本発明は上記事情を考慮してなされたもので、パッシブアンテナ素子のレドームによる影響を軽減することができ、さらには広い周波数帯でのインターフェロメータでの測角を実現することができ、また広角度からの電波入射を除去することのできる複合誘導装置及び複合誘導方法を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記目的を達成するために、本発明に係る複合誘導装置は、以下のように構成される。
【0010】
(1)アクティブ方式とパッシブ方式を採用する飛しょう体搭載の複合誘導装置において、前記飛しょう体における略円筒筐体先端の円形領域の中央に配置され、前記レドームを通じて前記飛しょう体正面方向からの電波を受信する第1のパッシブアンテナ素子群と、前記第1のパッシブアンテナ素子群の素子それぞれの受信信号を用いて目標方向を測角演算するパッシブ処理部と、前記第1のパッシブアンテナ素子群の周囲に配置され、前記レドームを通じて前記飛しょう体正面方向に対して電波を送受信するアクティブアンテナ素子群と、前記アクティブアンテナ素子群の素子それぞれの送受信信号を用いて目標方向を測角演算するアクティブ処理部と、前記パッシブ処理部及びアクティブ処理部それぞれで得られる測角演算結果に基づいて前記飛しょう体を前記目標方向に誘導する誘導手段とを具備する態様とする。
【0011】
(2)(1)の構成において、前記第1のパッシブアンテナ素子群は、測角方向について不均等に配置されて互いに間隔が異なる複数の素子を備え、前記パッシブ処理部は、観測する周波数帯に応じて前記配列間隔が異なる複数の素子の受信信号を切り換え選択して複数の素子間隔でインターフェロメータ測角を行う態様とする。
【0012】
(3)(1)の構成において、さらに、前記略円筒筐体の側面に周面に沿って配置され、前記第1のパッシブアンテナ素子群の観測測角範囲より広角の電波を受信する第2のパッシブアンテナ素子群を備え、パッシブ処理部は、前記第2のパッシブアンテナ素子群の各素子における受信信号の振幅のいずれかが前記第1のパッシブアンテナ素子群の受信信号の振幅値を越えるときは、前記測角演算結果を廃棄する態様とする。
【0013】
(4)(3)の構成において、前記パッシブ処理部は、前記第2のパッシブアンテナ素子群の各素子における受信信号の振幅値から入射する電波のゾーンを判定し、電波特性の変化に応じて前記第2のパッシブアンテナ素子群による廃棄範囲を調整する態様とする。
【0014】
また、本発明に係る複合誘導方法は、以下のように構成される。
【0015】
(5)アクティブ方式とパッシブ方式を採用する飛しょう体の複合誘導方法において、前記飛しょう体における略円筒筐体先端の円形領域の中央に沿って、前記レドームを通じて前記飛しょう体正面方向からの電波を受信する第1のパッシブアンテナ素子群を配置し、前記第1のパッシブアンテナ素子群の素子それぞれの受信信号を用いて目標方向を測角演算するパッシブ処理を実行し、前記第1のパッシブアンテナ素子群の周囲に、前記レドームを通じて前記飛しょう体正面方向に対して電波を送受信するアクティブアンテナ素子群を配置し、前記アクティブアンテナ素子群の素子それぞれの送受信信号を用いて目標方向を測角演算するアクティブ処理を実行し、前記パッシブ処理及びアクティブ処理それぞれで得られる測角演算結果に基づいて前記飛しょう体を前記目標方向に誘導する態様とする。
【0016】
(6)(5)の構成において、前記第1のパッシブアンテナ素子群は、測角方向について複数の素子を互いに間隔が異なるように不均等に配置し、前記パッシブ処理は、観測する周波数帯に応じて前記配列間隔が異なる複数の素子の受信信号を切り換え選択して複数の素子間隔でインターフェロメータ測角を行う態様とする。
【0017】
(7)(5)の構成において、さらに、前記略円筒筐体の側面に周面に沿って、前記第1のパッシブアンテナ素子群の観測測角範囲より広角の電波を受信する第2のパッシブアンテナ素子群を配置し、パッシブ処理は、前記第2のパッシブアンテナ素子群の各素子における受信信号の振幅のいずれかが前記第1のパッシブアンテナ素子群の受信信号の振幅値を越えるときは、前記測角演算結果を廃棄する態様とする。
【0018】
(8)(7)の構成において、前記パッシブ処理部、前記第2のパッシブアンテナ素子群の各素子における受信信号の振幅値から入射する電波のゾーンを判定し、電波特性の変化に応じて前記第2のパッシブアンテナ素子群による廃棄範囲を調整する態様とする。
【発明の効果】
【0019】
本発明によれば、パッシブアンテナ素子のレドームによる影響を軽減することができ、さらには広い周波数帯でのインターフェロメータでの測角を実現することができ、また広角度からの電波入射を除去することのできる複合誘導装置及び複合誘導方法を提供すること誘導装置を提供することができる。
【図面の簡単な説明】
【0020】
【図1】本発明に係る複合誘導装置が適用される飛しょう体の全体構成、及び、複合誘導装置と目標との関係を示す概略構成図。
【図2】図1に示す複合誘導装置の構成を示すブロック図。
【図3】図2に示すアクティブアンテナとパッシブアンテナを構成するアンテナ素子の詳細配置について、正面から見た場合の配置を示す図。
【図4】図2に示すアクティブアンテナとパッシブアンテナを構成するアンテナ素子の詳細配置について、左側面、右側面から見た場合の配置を示す図。
【図5】図2に示す正面に配置した第1群のアンテナ素子による測角方式として採用するインターフェロメータ方式について説明するための図。
【図6】上記実施形態において、観測周波数帯毎にインターフェロメータを実施するアンテナ素子を切換えたとき、測角値(θ)の精度低下を防ぐためのアンテナ素子配置を示す図。
【図7】上記実施形態において、複数の観測周波数帯のそれぞれと測角精度を確保する素子間隔との関係を示す図。
【図8】上記実施形態において、アンテナ素子の配置関係と判定区分との関係を示す図。
【図9】上記実施形態の例として、方位角方向に並ぶアンテナ素子それぞれの電波到来角度に対する振幅特性と単調特性範囲及び広角判定範囲を示す図。
【図10】上記実施形態の例として、単調特性範囲、広角判定範囲及びゾーン判定範囲それぞれの関係において、広角判定角度が単調特性範囲より内側になる場合を説明するための図。
【図11】上記実施形態の例として、単調特性範囲と広角判定範囲及びゾーン判定範囲それぞれの関係において、広角判定角度が単調特性範囲より外側になる場合を説明するための図。
【図12】上記実施形態において、複合誘導装置の1検出期間における主要部それぞれの処理タイミングを示す図。
【図13】上記実施形態において、パッシブ信号処理器における測角処理器の処理の流れを示すフローチャート。
【図14】上記実施形態において、観測周波数帯、素子間隔、選択素子の位相(Φの添え字はアンテナ素子の符号に対応)の関係をまとめたテーブルを示す図。
【発明を実施するための形態】
【0021】
以下、図面を参照して本発明の実施の形態を詳細に説明する。
【0022】
図1は本発明の一実施形態として、本発明に係る複合誘導装置が適用される飛しょう体の全体構成、及び、複合誘導装置と目標との関係を示す概略構成図である。図1において、Tは移動目標、Mは飛しょう体であり、飛しょう体Mは、複合誘導装置M1及び操舵装置M2を搭載している。
【0023】
複合誘導装置M1は、本発明の一実施形態を示す装置であり、移動目標Tに対して電波を照射(送信波)して目標Tから反射して戻ってくる電波(受信波)を検出し追跡する機能(アクティブ機能)と、移動目標Tが放射する電波(目標放射波)を検出し追跡する機能(パッシブ機能)とを有し、検出した移動目標Tを追跡するための操舵信号を出力する。
【0024】
操舵装置M2は複合誘導装置M1からの操舵信号をもとに、飛しょう体Mが目標方向に飛しょうするための操舵を実施する。
【0025】
図2は、上記複合誘導装置M1の構成を示すブロック図である。複合誘導装置M1の先端にはレドーム11が装着される。レドーム11は飛しょう体M1が高速で飛しょうする故に生じる空力的抗力を低減する形状(尖頭形状等)を有するとともに、空力的な圧力から内部器材を保護し、さらに、移動目標Tからの電波を広い周波数帯域で透過することができる材質が選定される。
【0026】
図2に示す上段はアクティブ機能を実現する系統(以下、アクティブ系装置)であり、アクティブアンテナ12、アクティブ高周波部13、アクティブ信号変換器14、アクティブ信号処理器15から成る。
【0027】
上記アクティブ系装置では、図示しない信号源から発生される送信信号をアクティブ信号変換器14で高周波に変換し、アクティブ高周波部15で電力増幅して、アクティブアンテナ12から移動目標Tに向けて送出する。
【0028】
また、移動目標Tから反射して戻ってくる電波をアクティブアンテナ12で受信し、高周波部13で低雑音増幅して、アクティブ信号変換器14でベースバンドに戻し、アクティブ信号処理器15に送る。
【0029】
上記アクティブ信号処理器15は、受信信号からクラッタ成分を除去して目標信号を検出し、その検出結果から移動目標Tの方向を演算出力する。これによって求められた目標方向は操舵信号生成器16に送られる。
【0030】
一方、図2に示す下段はパッシブ機能を実現する系統(以下、パッシブ系装置)であり、パッシブアンテナ17、パッシブ高周波部18、パッシブ信号変換器19、パッシブ信号処理器20から成る。パッシブアンテナ17は、目標Tが放射する多種の電波を受信できるよう広帯域受信特性を有する第1群のパッシブアンテナ素子A11〜A15と第2群のパッシブアンテナ素子A21〜A26とから成る。パッシブ信号処理器20は、データ処理器201、測角処理器202、タイミング制御器203から成る。第1群のパッシブアンテナ素子A11〜A15は移動目標Tの検出、測角を実施し、第2群のパッシブアンテナ素子A21〜A26は、観測対象範囲とされる角度よりも外側からの広角度で入射される電波を除去することを目的とする。
【0031】
なお、複合誘導装置M1は飛しょう体Mへの搭載から実装スペースが限定され、同時に電波を受信する系統数が限定されるため、図2のパッシブ高周波部18、パッシブ信号変換器19は4系統を有するものとした。したがって、パッシブアンテナ素子A11〜A15,A21〜A26からの受信信号は、受信系統数に合わせて4素子分の出力が得られるように、スイッチ等によるパッシブアンテナ切換器171により、内部で切換制御を実施するようにしている。
【0032】
但し、受信系統数は4に限定されるものではなく、器材実装スペースに応じて増減することは可能である。
【0033】
上記パッシブ高周波部18とパッシブ信号変換器19によりデジタル信号処理可能な形態に変換された信号は、パッシブ信号処理器20に入り、データ処理器201でAD変換等をされメモリ等に保存された後、測角処理器202で移動目標Tを検出、測角するための処理を実施し、移動目標Tの測角値(方向)を操舵信号生成器16に出力する。操舵信号生成器16では、アクティブ信号処理器15とパッシブ信号処理器20の双方から得られた移動目標Tの方向に関する情報を統合して、飛しょう体Mが移動目標Tを追跡するための操舵指令信号を生成し、操舵装置M2へ出力する。
【0034】
図3及び図4にアクティブアンテナ12と、パッシブアンテナ17を構成するアンテナ素子A11〜A15,A21〜A26の詳細配置を示す。図3は正面から見た場合、図4(a)は左側面、図4(b)は右側面から見た場合の配置を示している。これらのアンテナ12及びアンテナ素子A11〜A15,A21〜A26は、移動目標Tの検出と測角を目的として、飛しょう体Mの円筒形状の筐体における先端に配置されるため、図中の円形範囲それぞれの中に配置される。
【0035】
この点について、従来技術では、アクティブアンテナ12を優先的に中央に配置して、パッシブアンテナ17をその周囲に配置していた(特許文献1)。しかし、レドーム11を通過した電波を広帯域で受信する場合、レドーム11が空力的な配慮から尖頭形状等の特殊な形状となるため、パッシブアンテナ17をアクティブアンテナ12の周囲に配置してしまうと、レドーム11により電波の振幅、位相特性の歪が大きく、広帯域にわたって高い精度で移動目標Tの測角を実現するのは困難である。
【0036】
これを解決するために、本実施形態では、パッシブアンテナ17のうち、移動目標Tの検出と測角を行う第1群のアンテナ素子A11〜A15を、それぞれレドーム11の歪の影響が広帯域にわたって少ない中央に優先的に配置し、その周囲にアクティブアンテナ12を配置する。一般に、アクティブアンテナ12は自らの送信波の周波数帯域に合わせた狭帯域での対応で済むため、レドーム11の影響があっても最適な調整が可能である。
【0037】
一方、パッシブアンテナ17のうち、第2群のアンテナ素子A21〜A26は、飛しょう体Mの筐体内側面に、ほぼ等間隔に6箇所に配置する。このようにして、正面に配置した第1群のアンテナ素子A11〜A15によって目標測角を実施する際に、観測対象範囲とされる角度よりも広角度で入射してくる電波を第2群のアンテナ素子A21〜A26で検出し、観測対象範囲外の角度から入射される電波の受信信号であるものとして除去することで、誤った目標測角を回避する。
【0038】
ここで、図5を参照して、正面に配置した第1群のアンテナ素子A11〜A15による測角方式として採用するインターフェロメータ方式について説明する。
【0039】
このインターフェロメータ方式では、図5(a)に示す2つのアンテナ素子A,Bで同時に受信した電波の位相ΦA,ΦBを使用して、両素子A,B間の位相差ΦA-ΦBから、受信した電波の入射角度(目標の測角値)θを次式から算出する。
sinθ=(ΦA-ΦB)・C/(2π・F・d)…(1)
C:光速、F:電波周波数
このとき、電波の位相は、図5(b)に示すように、±180°で周期性を有することから、インターフェロメータ方式で得られる測角値は、観測対象の電波の周波数(F)と素子間隔(d)で決まる周期性を有する。
【0040】
従来は、この周期性を回避して観測したい角度範囲の中で単調性を確保するために、観測したい最大周波数に合わせて素子間隔(d)を設定した。しかし、この場合には観測周波数(F)が低くなるにつれて、インターフェロメータ方式で得られる測角値(θ)の精度が低下する問題がある。
【0041】
これを解決するために、本実施形態では、観測周波数帯毎にインターフェロメータを実施するアンテナ素子を切換えて、測角値(θ)の精度低下を防ぐ素子配置とする。アンテナ素子A11〜A15の詳細配置を図6に示す。
【0042】
図6において、アンテナ素子A11,A12,A13は、飛しょう体Mの飛しょう姿勢における高低角方向(紙面縦方向)の同一軸上に配置され、高低角方向のインターフェロメータ測角に用いられる。アンテナ素子A11,A12の素子間隔はd2、アンテナ素子A12,A13の素子間隔はd3とし、d2>d3とする。
【0043】
ここで、F1〜F4の各観測周波数帯で使用する素子間隔が適切になるように使用素子を選択することにより、インターフェロメータ測角における精度を確保する。図7に観測周波数帯F1〜F4のそれぞれと測角精度を確保する素子間隔との関係を示す。
【0044】
すなわち、観測対象とする最も低い周波数帯F1では、アンテナ素子A11−A13による素子間隔d1(=d2+d3)でインターフェロメータ測角を実施し、次の周波数帯F2ではアンテナ素子A11−A12の素子間隔d2でインターフェロメータ測角を実施し、次の周波数帯F3はアンテナ素子A13−A12の素子間隔d3でインターフェロメータ測角を実施し、最も高い周波数帯F4ではアンテナ素子A11,A12,A13の3素子を使用して素子間隔d4(=d2−d3)でインターフェロメータ測角を実施する。
【0045】
一方、アンテナ素子A14,A12,A15は、飛しょう体Mの飛しょう姿勢における方位角方向(紙面横方向)の同一軸上に配置され、方位角方向のインターフェロメータ測角に用いられる。アンテナ素子A15−A12の素子間隔はd2、アンテナ素子A12−A14の素子間隔はd3とし、d2>d3とする。
【0046】
ここで、高低角方向の測角と同様に、観測対象とする最も低い周波数帯F1では、アンテナ素子A14−A15による素子間隔d1(=d2+d3)でインターフェロメータ測角を実施し、次の周波数帯F2ではアンテナ素子A15−A12の素子間隔d2でインターフェロメータ測角を実施し、次の周波数帯F3ではアンテナ素子A14−A12の素子間隔d3でインターフェロメータ測角を実施し、最も高い周波数帯F4ではアンテナ素子A14,A12,A15の3素子を使用して素子間隔d4(=d2−d3)でインターフェロメータ測角を実施する。
【0047】
続いて、図8乃至図11を参照して、側面に配置したアンテナ素子A21〜A26による広角除去について説明する。
【0048】
インターフェロメータ測角では、周期性が必ず生じるため、観測対象角度範囲で単調性を確保しても、さらにその外側から入射する電波に対しては誤った角度検出をすることになる。したがって、観測対象範囲外から入射する電波を確実に除去する必要がある。以下、この処理を「広角除去」と称する。
【0049】
図8は各アンテナ素子A11〜A15,A21〜A26の配置関係と判定区分との関係を示す図、図9は例として方位角方向に並ぶアンテナ素子それぞれの電波到来角度に対する振幅特性と単調特性範囲及び広角判定範囲を示す図、図10は単調特性範囲と広角判定範囲及びゾーン判定範囲との関係において、広角判定角度が単調特性範囲より内側になる場合を説明するための図、図11は単調特性範囲と広角判定範囲及びゾーン判定範囲との関係において、広角判定角度が単調特性範囲より外側になる場合を説明するための図である。
【0050】
広角除去においては、図8に示す各アンテナ素子の配置において、例えば図9(方位方向の場合)に示すように、正面中央に配置したアンテナ素子A12、側面に配置したアンテナ素子A21〜A26(図9ではA22,A25)それぞれの受信信号の振幅レベルを比較して、側面に配置したアンテナ素子A21〜A26での振幅レベル全てよりも、正面アンテナ素子A12の振幅の方が大きいときに観測対象範囲外からの電波入射ではないと判定して測角処理を実施する。言い換えると、アンテナ素子A21〜A26でのいずれかの振幅レベルが、アンテナ素子A12の振幅レベルより大きいときは、観測対象範囲よりも外側からの電波入射と判定(広角判定)して、測角処理は実施しない。
【0051】
広角判定を実現するためには、アンテナ素子A21〜A26とアンテナ素子A12の振幅は、例えば図9に示すように、観測対象範囲外と判定する角度(a及びa′)で振幅特性が交差するように事前調整される。事前調整では、図10に示すように、観測対象範囲外と判定する角度範囲(a′以下、a以上)を、インターフェロメータ測角で単調性を確保する範囲(θL′からθU′)と重ねることで、インターフェロメータ測角での単調性は確保され、測角は可能となる。
【0052】
しかしながら、受信する電波の特性(例えば偏波の違い)が調整した電波条件と異なる場合には、例えばアンテナ素子A22の振幅特性V22が図9中点線で示すような特性となり、観測対象範囲外を判定するために調整した角度がずれる場合がある。特にこの角度が外側にずれた場合には、図中の点線内の角度範囲のように、観測対象内と判定されてもインターフェロメータの測角の単調性が確保されない角度範囲が生じ、この方向からの電波入射があった場合には誤った測角をしてしまう。
【0053】
こうした状況を回避するために、広角判定による観測対象の範囲内か否かの判定に加えて、図8に示すように、電波入射方向(方位方向と高低方向)のゾーン判定を実施する。ゾーン判定は、例えば図9に示すように、アンテナ素子A21〜A26(図9ではA22,A25)の範囲で受信した電波の振幅のうちスレッショルドVthを越えているものがある場合、そのアンテナ素子の位置から、入射している電波のゾーン、すなわち、方位方向の左ゾーンまたは右ゾーン、高低方向の上ゾーンまたは下ゾーンを判定する。
【0054】
さらに、方位角方向(左または右)、高低角方向(上または下)のゾーン極性を、インターフェロメータ測角による方位角方向、高低角方向の測角値の極性を一致させるように事前調整をしておく。
【0055】
これにより、図11の点線付近の角度範囲に示すように、観測対象外として調整した広角判定角度がずれて、インターフェロメータ測角の周期性から誤った測角を行う状況が生じても、ゾーン判定と測角値の極性一致を判定することで、誤って測角する状況を回避することができる。
【0056】
続いて、図12及び図13を参照して本実施形態の処理動作を説明する。
【0057】
図12は複合誘導装置M1の1検出期間における主要部それぞれの処理タイミングを示す図、図13はパッシブ信号処理器20における測角処理器202の処理の流れを示すフローチャートである。
【0058】
タイミング制御器203は、パッシブアンテナ切換器171に制御信号を出力して、1検出期間の中を図12に示すタイミングでパッシブアンテナ素子A11〜A15,A21〜A26を4つの受信系統に順次割り当てる。パッシブアンテナ切換器171は制御信号をもとに内蔵するスイッチ等を切換えて、使用するパッシブアンテナ素子を選択する。4つの受信系統で選択されたパッシブアンテナ素子の受信信号は、パッシブ高周波部18で低雑音増幅され、パッシブ信号変換器19でベースバンドに変換された後、データ処理器201でAD変換されてメモリに保存される。1検出期間の最後に、タイミング制御器203は観測周波数帯をパッシブ高周波部18に指定し、次の検出期間で観測する周波数を切り換えていく。
【0059】
尚、観測する周波数の切換幅等は、先の周波数帯F1〜F4とは独立に設定可能であり、後述の図13に示すように、インターフェロメータの測角処理は観測する周波数が周波数帯F1〜F4のいずれに含まれているかを判定することで実施される。
【0060】
測角処理器202は、図13に示すフローチャートに従って、1検出期間毎に広角判定とインターフェロメータによる測角演算を実施する。図13において、データ処理器201から、保存された4つの受信系統それぞれの全てのアンテナ素子受信データ(振幅V・位相Φ)を入力する(ステップS1)。まず、正面のほぼ中心に位置するアンテナ素子A12の振幅値(V12)が目標検出に必要なスレッショルドレベル(Vth)以上であるかを判定する(ステップS2)。スレッショルドレベル以下である場合には「検出なし」として処理を終了する。スレッショルドレベル以上である場合には、「検出あり」として測角のための次のステップに移行する。
【0061】
次に、アンテナ素子A12での振幅値(V12)と、側面に配置されている6個のアンテナ素子A21〜A26との振幅値(V21〜V26)を比較し(ステップS3)、アンテナ素子A12の振幅値(V12)が(V21〜V26)のいずれよりも大きいか否かを判定する(ステップS4)。V12>V21〜V26の場合には、観測対象範囲とされる正面方向からの受信であると判定して測角演算へ移行する。側面のアンテナ素子A21〜A26の振幅値(V21〜V26)のいずれかがアンテナ素子A12の振幅値(V12)より大きい場合には、観測対象範囲よりも外側からの電波入射と判定(広角判定)して一連の処理を終了する。
【0062】
次に、測角演算においては、観測している周波数が観測周波数帯F1〜F4のいずれにあるかを判定し(ステップS5)、観測周波数帯から定まる素子間隔とそれに対応するアンテナ素子の受信データ(各素子の位相Φ)を選択して(ステップS6)、インターフェロメータ原理に基づく測角演算(図5)を実施する(ステップS7)。ステップS6の処理は、例えば図14に示す観測周波数帯、素子間隔、選択素子の位相(Φの添え字はアンテナ素子の符号に対応)の関係をまとめたテーブルを参照してそれぞれの諸元を選択する。ステップS7の測角演算では、(1)式を用いて、方位角方向と高低角方向の各々について測角値(θAZ,θEL)を算出する。
【0063】
この時点で、側面アンテナ素子A21〜A26の振幅値(V21〜V26)がスレッショルドレベル(Vth)以上かを判定し、いずれもスレッショルドレベル以下であれば観測対象範囲内であり測角演算は有効と判定し、そのまま測角演算で得られた測角値(θAZ,θEL)を操舵信号生成器16へ出力する。一方、側面アンテナ素子A21〜A26の振幅値(V21〜V26)のいずれかがスレッショルドレベルを越えている場合には、観測対象範囲内の周辺領域である可能性があるため、ゾーン判定のステップへ移行する。
【0064】
具体的に説明すると、ステップS7の処理が終了した時点で、側面に配置された第2群のアンテナ素子A21〜A26それぞれの振幅値V21〜V26のうち最大の振幅値Vmaxを選択する(ステップS8)。ここで、最大振幅値Vmaxがスレッショルドレベルを越えたか否かを判断し(ステップS9)、越えていなければ受信電波は観測対象内と判断し、ゾーンを指定することなくステップS7で求めた方位角・高低角それぞれの測角値を出力して(ステップS10)、一連の処理を終了する。スレッショルドレベルを越えていた場合には、以下に述べるゾーンの指定処理に移行する。
【0065】
上記ゾーンの指定処理では、まず側面アンテナ素子A21〜A26それぞれの受信信号の振幅値V21〜V26のうち最大値が得られたアンテナ素子を選択し、図8に示されるように、そのアンテナ素子の位置から方位方向のゾーン指定を実施する(ステップS11)。また側面アンテナ素子A21,A23,A24,A26それぞれの受信信号の振幅値V21,V23,V34,V26のうち最大値が得られたアンテナ素子を選択し、図8に示されるように、そのアンテナ素子の位置から高低方向のゾーン指定を実施する(ステップS12)。
【0066】
次に、測角演算で得られた高低角と方位角の測角値の極性、ゾーン指定領域で得られた極性それぞれの情報を取得し(ステップS13)、方位角の測角値θAZの極性と方位方向のゾーンの極性、高低角の測角値θELの極性と高低方向のゾーンの極性それぞれを比較する(ステップS14)。この判定において、共に一致していれば観測対象内で測角演算は有効と判定してステップS10に移行し、ステップS7で求めた方位角・高低角それぞれの測角値(θAZ,θEL)を操舵信号生成器16へ出力して一連の処理を終了する。一方、いずれかが一致しない場合には、インターフェロメータ方式で誤って測角している範囲である可能性が高いため、無効データとして処理を終了する。
【0067】
上記構成による複合誘導装置では、第1群のパッシブアンテナ素子A11〜A15を優先して正面中央に集中して配置している。これにより、レドーム11の影響が少なく、広帯域で受信信号が得られる。また、パッシブアンテナによる測角方式はインターフェロメータ方式として、計5個のアンテナ素子A11〜A15を不等間隔に配置して、方位、高低角方向ともに4種類の素子間隔d1〜d4でインターフェロメータ測角を実現し、観測する周波数帯F1〜F4に応じて観測するアンテナ素子を切換えることで、インターフェロメータ測角における素子間隔を変えるようにしている。これにより広い周波数帯でのインターフェロメータでの測角を精度よく実現することができる。
【0068】
一方、飛しょう体Mの側面に、周囲6方向に指向するように第2群のパッシブアンテナ素子A21〜A26を配置し、各アンテナ素子A21〜A26の受信信号の振幅値からインターフェロメータの測角が困難となる広角度からの電波入射を判別し、適宜、測角演算結果を廃棄するようにしている。これにより、観測対象範囲からの電波による測角精度を向上させることができる。さらに、偏波等の電波特性が変化し除去可能な範囲が変動しても、入射する電波のゾーン(高低角方向、方位角方向)等も判定するようにしている。これにより、誤った測角を実施した場合にそれを排除することができる。
【0069】
尚、上記実施形態では、同時に観測する受信系統を4系統としたが、実装規模によっては、任意の系統数にも適用可能である。いずれの場合も、処理タイミングによって観測形態の数を変えることで対応可能である。また、測角する方向についても、高低角、方位角の2方向に限ることなく、1方向の場合にはより簡略された形態での実現が可能である。
【0070】
また、本発明は上記実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、本発明によれば、上記実施形態に開示されている複数の構成要素の適宜な組み合わせにより、種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。さらに、異なる実施形態にわたる構成要素を適宜組み合わせてもよい。
【符号の説明】
【0071】
T…移動目標、M…飛しょう体、M1…複合誘導装置、M2…操舵装置、11…レドーム、12…アクティブアンテナ、13…アクティブ高周波部、14…アクティブ信号変換部、15…アクティブ信号処理器、16…操舵信号生成器、17…パッシブアンテナ切換器、18…パッシブ高周波部、19…パッシブ信号変換器、20…パッシブ信号変換器、201…データ処理器、202…測角処理器、203…タイミング制御器。
【特許請求の範囲】
【請求項1】
アクティブ方式とパッシブ方式を採用する飛しょう体搭載の複合誘導装置において、
前記飛しょう体における略円筒筐体先端の円形領域の中央に配置され、前記レドームを通じて前記飛しょう体正面方向からの電波を受信する第1のパッシブアンテナ素子群と、
前記第1のパッシブアンテナ素子群の素子それぞれの受信信号を用いて目標方向を測角演算するパッシブ処理部と、
前記第1のパッシブアンテナ素子群の周囲に配置され、前記レドームを通じて前記飛しょう体正面方向に対して電波を送受信するアクティブアンテナ素子群と、
前記アクティブアンテナ素子群の素子それぞれの送受信信号を用いて目標方向を測角演算するアクティブ処理部と、
前記パッシブ処理部及びアクティブ処理部それぞれで得られる測角演算結果に基づいて前記飛しょう体を前記目標方向に誘導する誘導手段と
を具備することを特徴とする複合誘導装置。
【請求項2】
前記第1のパッシブアンテナ素子群は、測角方向について不均等に配置されて互いに間隔が異なる複数の素子を備え、
前記パッシブ処理部は、観測する周波数帯に応じて前記配列間隔が異なる複数の素子の受信信号を切り換え選択して複数の素子間隔でインターフェロメータ測角を行うことを特徴とする請求項1記載の複合誘導装置。
【請求項3】
さらに、前記略円筒筐体の側面に周面に沿って配置され、前記第1のパッシブアンテナ素子群の観測測角範囲より広角の電波を受信する第2のパッシブアンテナ素子群を備え、
パッシブ処理部は、前記第2のパッシブアンテナ素子群の各素子における受信信号の振幅のいずれかが前記第1のパッシブアンテナ素子群の受信信号の振幅値を越えるときは、前記測角演算結果を廃棄することを特徴とする請求項1記載の複合誘導装置。
【請求項4】
前記パッシブ処理部は、前記第2のパッシブアンテナ素子群の各素子における受信信号の振幅値から入射する電波のゾーンを判定し、電波特性の変化に応じて前記第2のパッシブアンテナ素子群による廃棄範囲を調整することを特徴とする請求項3記載の複合誘導装置。
【請求項5】
アクティブ方式とパッシブ方式を採用する飛しょう体の複合誘導方法において、
前記飛しょう体における略円筒筐体先端の円形領域の中央に沿って、前記レドームを通じて前記飛しょう体正面方向からの電波を受信する第1のパッシブアンテナ素子群を配置し、
前記第1のパッシブアンテナ素子群の素子それぞれの受信信号を用いて目標方向を測角演算するパッシブ処理を実行し、
前記第1のパッシブアンテナ素子群の周囲に、前記レドームを通じて前記飛しょう体正面方向に対して電波を送受信するアクティブアンテナ素子群を配置し、
前記アクティブアンテナ素子群の素子それぞれの送受信信号を用いて目標方向を測角演算するアクティブ処理を実行し、
前記パッシブ処理及びアクティブ処理それぞれで得られる測角演算結果に基づいて前記飛しょう体を前記目標方向に誘導することを特徴とする複合誘導方法。
【請求項6】
前記第1のパッシブアンテナ素子群は、測角方向について複数の素子を互いに間隔が異なるように不均等に配置し、
前記パッシブ処理は、観測する周波数帯に応じて前記配列間隔が異なる複数の素子の受信信号を切り換え選択して複数の素子間隔でインターフェロメータ測角を行うことを特徴とする請求項5記載の複合誘導方法。
【請求項7】
さらに、前記略円筒筐体の側面に周面に沿って、前記第1のパッシブアンテナ素子群の観測測角範囲より広角の電波を受信する第2のパッシブアンテナ素子群を配置し、
パッシブ処理は、前記第2のパッシブアンテナ素子群の各素子における受信信号の振幅のいずれかが前記第1のパッシブアンテナ素子群の受信信号の振幅値を越えるときは、前記測角演算結果を廃棄することを特徴とする請求項5記載の複合誘導方法。
【請求項8】
前記パッシブ処理部、前記第2のパッシブアンテナ素子群の各素子における受信信号の振幅値から入射する電波のゾーンを判定し、電波特性の変化に応じて前記第2のパッシブアンテナ素子群による廃棄範囲を調整することを特徴とする請求項7記載の複合誘導方法。
【請求項1】
アクティブ方式とパッシブ方式を採用する飛しょう体搭載の複合誘導装置において、
前記飛しょう体における略円筒筐体先端の円形領域の中央に配置され、前記レドームを通じて前記飛しょう体正面方向からの電波を受信する第1のパッシブアンテナ素子群と、
前記第1のパッシブアンテナ素子群の素子それぞれの受信信号を用いて目標方向を測角演算するパッシブ処理部と、
前記第1のパッシブアンテナ素子群の周囲に配置され、前記レドームを通じて前記飛しょう体正面方向に対して電波を送受信するアクティブアンテナ素子群と、
前記アクティブアンテナ素子群の素子それぞれの送受信信号を用いて目標方向を測角演算するアクティブ処理部と、
前記パッシブ処理部及びアクティブ処理部それぞれで得られる測角演算結果に基づいて前記飛しょう体を前記目標方向に誘導する誘導手段と
を具備することを特徴とする複合誘導装置。
【請求項2】
前記第1のパッシブアンテナ素子群は、測角方向について不均等に配置されて互いに間隔が異なる複数の素子を備え、
前記パッシブ処理部は、観測する周波数帯に応じて前記配列間隔が異なる複数の素子の受信信号を切り換え選択して複数の素子間隔でインターフェロメータ測角を行うことを特徴とする請求項1記載の複合誘導装置。
【請求項3】
さらに、前記略円筒筐体の側面に周面に沿って配置され、前記第1のパッシブアンテナ素子群の観測測角範囲より広角の電波を受信する第2のパッシブアンテナ素子群を備え、
パッシブ処理部は、前記第2のパッシブアンテナ素子群の各素子における受信信号の振幅のいずれかが前記第1のパッシブアンテナ素子群の受信信号の振幅値を越えるときは、前記測角演算結果を廃棄することを特徴とする請求項1記載の複合誘導装置。
【請求項4】
前記パッシブ処理部は、前記第2のパッシブアンテナ素子群の各素子における受信信号の振幅値から入射する電波のゾーンを判定し、電波特性の変化に応じて前記第2のパッシブアンテナ素子群による廃棄範囲を調整することを特徴とする請求項3記載の複合誘導装置。
【請求項5】
アクティブ方式とパッシブ方式を採用する飛しょう体の複合誘導方法において、
前記飛しょう体における略円筒筐体先端の円形領域の中央に沿って、前記レドームを通じて前記飛しょう体正面方向からの電波を受信する第1のパッシブアンテナ素子群を配置し、
前記第1のパッシブアンテナ素子群の素子それぞれの受信信号を用いて目標方向を測角演算するパッシブ処理を実行し、
前記第1のパッシブアンテナ素子群の周囲に、前記レドームを通じて前記飛しょう体正面方向に対して電波を送受信するアクティブアンテナ素子群を配置し、
前記アクティブアンテナ素子群の素子それぞれの送受信信号を用いて目標方向を測角演算するアクティブ処理を実行し、
前記パッシブ処理及びアクティブ処理それぞれで得られる測角演算結果に基づいて前記飛しょう体を前記目標方向に誘導することを特徴とする複合誘導方法。
【請求項6】
前記第1のパッシブアンテナ素子群は、測角方向について複数の素子を互いに間隔が異なるように不均等に配置し、
前記パッシブ処理は、観測する周波数帯に応じて前記配列間隔が異なる複数の素子の受信信号を切り換え選択して複数の素子間隔でインターフェロメータ測角を行うことを特徴とする請求項5記載の複合誘導方法。
【請求項7】
さらに、前記略円筒筐体の側面に周面に沿って、前記第1のパッシブアンテナ素子群の観測測角範囲より広角の電波を受信する第2のパッシブアンテナ素子群を配置し、
パッシブ処理は、前記第2のパッシブアンテナ素子群の各素子における受信信号の振幅のいずれかが前記第1のパッシブアンテナ素子群の受信信号の振幅値を越えるときは、前記測角演算結果を廃棄することを特徴とする請求項5記載の複合誘導方法。
【請求項8】
前記パッシブ処理部、前記第2のパッシブアンテナ素子群の各素子における受信信号の振幅値から入射する電波のゾーンを判定し、電波特性の変化に応じて前記第2のパッシブアンテナ素子群による廃棄範囲を調整することを特徴とする請求項7記載の複合誘導方法。
【図1】


【図2】
【図3】

【図4】

【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2011−153768(P2011−153768A)
【公開日】平成23年8月11日(2011.8.11)
【国際特許分類】
【出願番号】特願2010−15949(P2010−15949)
【出願日】平成22年1月27日(2010.1.27)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成23年8月11日(2011.8.11)
【国際特許分類】
【出願日】平成22年1月27日(2010.1.27)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]