
複数のコリメータの自動選択
複数の治療ノードのそれぞれにおけるビーム・パラメータを自動的に決定するためのシステム及び方法が開示される。ビーム・パラメータは、ビーム形状、ビーム寸法及び/又はビーム配向を含んでよい。また、放射線治療システムにおいて複数のコリメータを自動的に選択するためのシステム及び方法が開示される。

【発明の詳細な説明】
【関連出願】
【0001】
(関連出願の相互引用)
本出願は、2006年4月7日に出願された米国特許仮出願第60/790,503号に対する優先権を主張し、その全体が参照により本明細書に組み込まれる。
【技術分野】
【0002】
本発明の実施形態は、概して放射線治療に関し、より詳細には放射線治療における治療プランニングに関する。
【背景技術】
【0003】
腫瘍や病変は、何ら生理学的機能を果たさない、細胞の抑制不能な進行性の増殖によりもたらされる組織の異常な成長により特徴付けられるタイプの病理構造体である。病理構造体は、外科手術などの侵襲的手法を用いて治療することが可能であるが、これは、患者にとっては有害かつリスクが高い。病理構造体(例えば腫瘍、病変、血管奇形、神経障害など)の治療のための非侵襲的な方法が、外からのビーム照射療法である。あるタイプのビーム照射療法においては、外照射源は、複数の角度から腫瘍部位に一連のX線ビームを向けるように使用され、患者は、腫瘍がこのビームの経路中に位置するように位置決めされる。この照射源の角度が変わるごとに、各ビームは腫瘍部位を貫通するが、腫瘍部位への途中で健全な組織である異なる部位を貫通する。その結果、腫瘍での集積線量は高く、健全な組織に対する平均線量は低くなる。
【0004】
「放射線療法」という用語は、放射線が壊死目的ではなく治療目的で標的領域に加えられる放射線治療技法を意味する。通常、放射線療法の治療セッションにおいて使用される放射線量は、放射線外科手術セッションにおいて使用される量と比較して約1桁低い。典型的に、放射線療法は、1治療あたりの線量の低さ(例えば100〜200センチグレイ(cGy))、治療時間の短さ(例えば1治療あたり10〜30分)及び通常分割照射又は過分割照射(例えば30〜45日間の治療)により特徴付けられる。便宜上、本明細書において、「放射線治療」という用語は、特に放射線の大きさに関して言及しない限り、放射線外科手術及び/又は放射線療法を意味するために用いられる。
【0005】
健全な組織に対する照射線量を最小限にし、センシティブな危険構造を回避しつつ、標的領域へ必要な線量を投与するために、適切な治療プランニング・システムが必要とされる。治療プランは、適用される放射線ビームの方向や強度などの量と、ビームの露光期間とを指定する。治療プランは、(目下、臨床目的で必要とされる)指定された線量が腫瘍に投与されるとともに、周囲の健全な組織に対する、特にあらゆる隣接する重要な器官に対する過剰線量を回避するように、設計されることが望ましい。適切な治療プランニング・システムの開発は、より大型の、変則的形状を有する又は、センシティブな若しくは危険な構造付近に存在する腫瘍に関しては、特に困難である。
【0006】
通常、治療プランは、ビーム位置、ビーム配向、ビーム形状、ビーム強度、所望の放射線量拘束値などの(特定の臨床目的を達成するために放射線科医が必要と見なす)入力パラメータより生成する。洗練された治療プランが、高度なモデリング技術や先端技術による最適化アルゴリズムを使用して展開される。
【0007】
2種類の治療プランニング技法、すなわち順方向プランニングと逆方向プランニングが知られている。初期の放射線治療においては、治療プランニング・システムは、順方向プランニング技法に関心が集中する傾向があった。順方向治療プランニングにおいては、医学物理学者が、放射線量期間、ビーム・オン時間、選択されたビームの軌道を決定し、次いで放射線が腫瘍、危険構造(すなわち重要な器官)、他の健全な組織によってどのくらい吸収されるかを計算する。あるボリュームの組織における放射線吸収量は、その組織の特性と、ビーム発生源及びビーム軸までのこのボリュームにおける各ポイントの距離とによって決定されるので、所与数のビームに関して腫瘍や他の構造に対する線量レベルを個別に制御することはあり得ない。より詳細には、医学物理学者は、自身の経験にもとづいて、ビーム位置やビーム強度などの様々な治療パラメータに対する値を「推測」し、又は割り当てる。次いで、治療プランニング・システムは、そこから得られた線量分布を計算する。得られた線量分布を再検討した後、医学物理学者は、治療パラメータの値を調整する。システムは、新しく得られた線量分布を再び計算する。このプロセスは、医学物理学者が自身の所望する分布と比較して、得られた線量分布に満足するまで繰り返される。順方向プランニングは、ビーム方向と線量ウェイトの多様な選択肢にわたって繰り返して行い、得られた線量分布を適切に評価するユーザの能力に依存する傾向がある。ユーザの経験度がより高いほど、満足のゆく線量分布が得られる可能性がより高い。
【0008】
しばしば、順方向プランニングはアイソセントリック治療プロセスを使用するが、このアイソセントリック治療プロセスにおいては、外照射源は複数の角度から腫瘍標的に一連のX線ビームを向けるように使用され、患者はこの腫瘍がビームの回転中心(アイソセンタ)に位置するように位置決めされる。アイソセントリック・プランニングにおいては、利用可能なビームがそれぞれ、「アイソセンタ」を形成するように同一ポイントに照準を定められるが、概してこのアイソセンタは、球によって表されるほぼ球形の等線量領域である。したがって、アイソセントリック・プランニングは、実質的に規則的な(例えば球形の)形状を有する腫瘍を治療する際に適用されることが多い。放射ビームは、コリメータと呼ばれる機器によって形状設定される。コリメータは、放射線に対して不透過性の高密度物質から構成されるが、例外として放射線が貫通し得る中空部分が存在する。さらに、この放射線ビームの形状と寸法は、この中空部分(絞り)の形状と寸法によって決定される。「コリメータ寸法」と言う場合、所与のコリメータ構成によって生成される放射線ビームの寸法を意味し、これは、照射源からの所与の距離で測定される。したがって、アイソセントリック・プランニングにおける放射線量からなる球の寸法は、例えば照射源から約800ミリメートルの位置で測定される場合に約30ミリメートルであるコリメータ寸法に依拠する。この照射源の角度が変わるごとに、各ビームは腫瘍を貫通するが、腫瘍への途中で健全な組織である異なる部位を貫通する。標的である病理構造体を治療するために、複数の線量球が、病理構造体のシルエットに忠実に一致する輪郭を取得するために、互いに重ね合わされ、すなわち「スタックされ」る。標的ボリューム内でアイソセンタをスタックすることによって、ほぼ全ての標的が十分な線量を受けることを確実にするプランが展開する。その結果、腫瘍での集積線量が高くなり、健全な組織に対する平均線量が低くなる。
【0009】
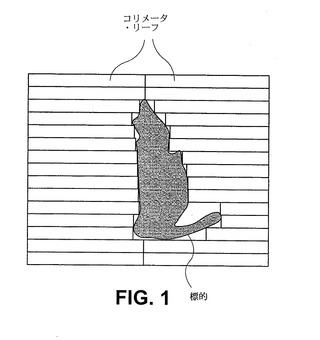
ガントリ・ベース放射線治療システムでは、放射線ビームが、放射線ビーム源の方位から見て標的のシルエットに合致するように、マルチリーフ・コリメータ(MLC)によって整形される。MLCは、ガントリに取り付けられ、線形加速器に結合される。MLCは、ビーム強度を変更し、放射線分布を制御するように放射線をブロックする及び/又は濾波することの可能な、いくつかの調節可能なリーフを含む。典型的には、リーフは、放射線に対して本質的に不透過性の高密度物質(例えばタングステン)から構成され、放射線場の形状を形作るようにビームの放射線場の中へ及び放射線場から外へ、個別に機械的に駆動される。図1は、標的のシルエットに対応する放射線場の形状を形作るように調節されたMLCのリーフを示す。放射線治療プランがMLC用に生成される2つの従来的な方法がある。
【0010】
殆どの放射線投与システムが、円内で回転自在である線形加速器で患者を包囲する円形ガントリを使用する。複数のビームが生成されて、円の周りでこの加速器を移動させ、このビームの軌道は、「ガントリ角度」と呼ばれる回転角を描く単一の角度によって特徴付けられる。MLCを有する従来のIMRT(強度変調放射線治療)システムでは、治療プランニングは、まず治療システムの各ノードでの、すなわち各所望の角度での最適な線量分布を決定することから実施される。線量分布が決定された後に、場形状が、MLCの制約条件を考慮して、リーフ・シークエンシング・アルゴリズムを利用して生成される。すなわち、命令のセットが生成されて、最適な線量分布を可能な限り忠実に実現するために所与のパターンにリーフを移動させる。予想される線量分布が生成されたリーフ・シークエンシング・アルゴリズムから計算された後で、標的関心ボリューム(「VOI」)の放射線治療が行われる。
【0011】
MLCを有する従来の3Dコンフォーマル・システムでは、治療プランニングは、まず標的のシルエットにMLCのリーフを一致させることから実施される。この場合、リーフ・シークエンシング・アルゴリズムがないため、プランニング・コンポーネントは、そのガントリ角度から標的のシルエットに各ビームの形状を一致させることだけを要求する。一度MLCの位置が決定されると、予想される線量分布を生成することができ、標的VOIの放射線治療が行われる。
【0012】
放射線治療を投与する他の様式は、CyberKnife(登録商標)システムによって実現されるものである。放射線投与機器を患者の周囲で円形に移動させる代わりに、これは、平行移動と回転移動を共に自由に行う多関節ロボット・マニピュレータに取り付けられる。したがって、放射線は、ガントリに取り付けられるライナックが移動可能である円弧内で選択される角度に限定されるのではなく、患者に対して多様な位置と配向から投与することが可能である。
【0013】
本発明が、添付の図面の図において例示として図示されるが、これらに限定されない。
【発明を実施するための最良の形態】
【0014】
以下の記述において、説明のために、多数の具体的な詳細が、本発明の十分に理解させるために述べられる。しかし、本発明はこれらの具体的な詳細を伴わずに実施することは当業者には明らかであろう。他の例において、よく知られた回路、構造、技法は、この記述の理解を不要に曖昧にすることを避けるために、詳細には示されず、又はブロック図の形態で示される。
【0015】
この記述において「一実施形態」と言う場合、これは、この実施形態に関連して説明される特定の機能、構造、又は特徴が、本発明の少なくとも1つの実施形態に含まれることを意味する。本明細書中の様々な箇所において「一実施形態において」という表現が出現するが、これら全てが同一の実施形態を必ずしも指すわけではない。
【0016】
放射線治療システムのための1つ又は複数の放射線ビーム・パラメータの選択の自動化のための装置及び方法が説明される。1つの特定の実施形態においては、この装置及び方法は、ビーム寸法を自動的に選択する。他の実施形態において、この装置及び方法は、ビーム形状が自動的に決定される。さらに他の実施形態においては、この装置及び方法は、ビーム配向を自動的に決定する。この装置及び方法は、ビーム寸法、ビーム形状、ビーム配向の組合せを自動的に決定することが理解されよう。また、この装置及び方法の実施形態は、複数のコリメータを自動的に選択する。また、この装置及び方法の実施形態は、自動的に決定されたビーム・パラメータ(又は複数のパラメータ)にもとづいて1つ又は複数のコリメータを自動的に選択する。
【0017】
逆方向プランニングにおいては、順方向プランニングとは逆に、医学物理学者が、所望の線量分布を、例えば腫瘍に対する最小線量と他の健全な組織に対する最大線量とを個別に指定し、次いで治療プランニング・モジュールが、指定された線量条件を達成するためにビームの方向と距離を選択すると共に総数と合計強度を選択する。ユーザにより所望の線量分布が指定されて入力されると(例えば最小線量及び最大線量)、逆方向プランニング・モジュールは、線量ウェイト及び/又はビーム方向を選択し最適化する、すなわちそのような分布をもたらすビームの最適なセットを選択する。
【0018】
逆方向プランニングの際に、関心ボリューム(VOI)が、与えられる放射線量に関して標的とされるべき又は回避されるべきユーザ画定構造を表すために使用される。すなわち、照射源は、治療を要する腫瘍に相当するVOIに放射線量を集中させるとともに、危険構造に相当するVOIへの放射線量を可能な限り回避させるように計算された配列で配置される。一度標的(例えば腫瘍)VOIが定められると、危険VOI及び軟組織(標的VOIや危険VOIに相当しない治療領域内の全組織)のボリュームが指定され、担当の放射線腫瘍医又は医学物理学者が、例えば標的VOIに対する最小放射線量と正常及び健全な危険組織に対する最大線量とを指定する。次いで、ソフトウェアが、治療プランの線量拘束値を満たすように、放射線治療システムの位置指定性能に依拠して逆方向治療プランを生成する。
【0019】
図2は、CT画像のスライスを表示する、治療プランニング・システムのグラフィカル出力の想像図である。CT画像の図は、治療のために標的とされる病理構造体と、病理構造体付近に位置する危険領域とを含む。治療プランニング・ソフトウェアは、危険領域の周囲の危険領域輪郭と、病理構造体の周囲の標的領域輪郭とを生成させる。従来は、ユーザが、対応する輪郭を生成するために治療プランニング・ソフトウェアが使用するディスプレイ上で、ポイント(例えば図2の輪郭線上のいくつかのドット)を手動で描画していた。これは容易な作業と思われる場合があるが、この一致作業は、病理構造体や正常構造体の3次元性と変則性のために難しい。標的領域に対する指定された最小線量及び危険領域に対する最大線量にもとづき、治療プランニング・ソフトウェアは、標的領域に対して線量等高線を生成する。線量等高線は、一定線量の線であり、標的領域に関して指定された規定線量の所与の線量パーセンテージ(例えば60%、70%、80%など)、又は絶対線量値(例えば2000センチグレイ)を表す。理想的には、臨床的に有効と見なされる線量の最少量を表す線量等高線が、標的領域の輪郭と完全に一致するべきである。いくつかの場合では、治療プランニング・ソフトウェアにより生成される線量等高線は、最適なものではなく、図2に図示されるように危険領域の部分を含む可能性がある。
【0020】
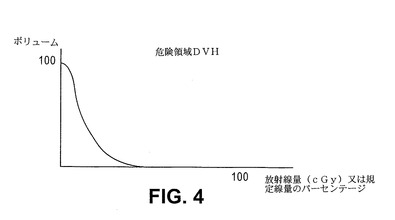
効果的な放射線治療システムに対する2つの主要な要件は、等質性及び共形性である。等質性は、標的(例えば腫瘍、病変、血管奇形などの病理構造体)のボリューム上の放射線量の均一性であり、線量ボリュームヒストグラム(DVH)により特徴付けることが可能である。DVHは、y軸においては、絶対測定値として、又はVOIボリュームのパーセンテージとしてボリュームを表す。x軸には、絶対線量又は所与線量(例えば最大線量又は規定線量)のパーセンテージとしての線量値がある。DVHグラフは、VOIのどれほどのボリュームが、x軸上の対応する線量値以上の線量によってカバーされるかを示す。病理構造体に関する理想的なDVHは、図3に図示される矩形関数となり、線量は、病理構造体のボリューム上で規定線量の100パーセントとなる。危険領域に関する望ましいDVHは、図4に図示されるプロファイルを有し、危険構造体の構造のボリュームは、規定線量の可能な限り少量を受ける。
【0021】
共形性は、放射線量が、隣接する危険構造に対する損傷を回避するために標的(例えば腫瘍)の形状と範囲に一致する(合致する)度合である。より具体的には、共形性は、標的VOI内における規定(Rx)線量の量(適用される線量の量)の基準である。共形性は、共形性指数(CI)=(≧Rx線量での総ボリューム)/(≧Rx線量での標的ボリューム)を使用して測定することができる。完全な共形性においては、CI=1となる。従来の放射線療法による治療では、治療プランニング・ソフトウェアを使用して、臨床医が、治療線量(例えば3000cGy)の適用のために対応するVOIに関する線量等高線を特定する。
【0022】
放射線治療プランニングの目的は、臨床対象に一致する線量分布(標的構造と危険構造に対する最小線量と最大線量、共形性、等質性など)を生成する各ビームの位置、形状、「ウェイト」(ビームにより投与される放射線の量)を含む放射線ビームのセットを見つけることである。CyberKnife(登録商標)システムなどのロボット・ベースの放射線治療においては、放射線ビームは、患者に対して様々な位置と配向に移動可能である。
【0023】
図5は、本発明の一実施形態による、照射源をそこに位置決めするための空間ノードのセットを含む、放射線治療実施システム100の作業空間の斜視図である。放射線治療実施システム100の図示される実施形態は、照射源105、治療床110、検出器115A、115B(集合的には115、また撮像装置とも呼ぶ)、撮像源120A、120B(集合的には120)、ロボット・アーム125を含む。
【0024】
放射線治療実施システム100は、放射線治療(例えば放射線外科手術及び/又は放射線療法)を実施して、患者内の病変(例えば腫瘍組織)を治療する又は破壊するために使用する。放射線治療の際に、患者は治療床110上に載せられ、治療床110が操縦されて、プリセット位置に、又は照射源105にアクセス可能な作動範囲(例えば視界)内で、標的を示す関心ボリューム(「VOI」)を位置決めする。一実施形態において、放射線治療実施システム100は、画像誘導放射線治療実施システムである。撮像源120と検出器115とが一体となって、治療床110及びその上の患者の位置と、患者内のVOIに対する照射源105の整列との視覚的制御を実現する画像誘導システムとなる。一実施形態において、治療床110は、ロボット・アームなどの位置決めシステム(図示せず)に結合されてよく、これは、画像誘導システムからフィードバックを受けて、照射源105に対する患者内のVOIの変位と配向の両方の正確な制御を実現する。
【0025】
一実施形態において、ロボット・アーム125は、その動作エンベロープ内において殆ど無数の可能性を伴って照射源105を位置決めすることが可能である複数の(例えば6)自由度を有する。このタイプの動作を可能にすることにより、いくつかの問題が生じることがある。第1に、多数の位置指定が可能であることにより、特定のVOIを治療するためのビーム位置やビーム軌道を決定する際に、治療プランニング・システムが解決すべき困難な問題が生じる。第2に、ロボット・アーム125の動作エンベロープ内における非制約的な動作を可能にすることによって、照射源105と、患者又は他の定置物体との間での衝突の可能性が生じ得る。これらの問題は、照射源105が放射線ビームをそこから発する有限数の空間ノードに照射源105を制限し、さらにロボット・アーム125が空間ノード間で辿らなければならない空間経路(既知の安全経路)を生成することによって解決することが可能である。
【0026】
空間ノードとこれらの空間ノードを相互に接続する関連付けされる安全経路との集合体が、「作業空間」又は「ノード・セット」と呼ばれる。図5は、作業空間130を図示し、それぞれが「+」記号によって表されている多数の空間ノード135(2つだけが符号を付けられている)を含む。複数の種々の作業空間が、種々の患者作業領域のために生成され、定められる。例えば、作業空間130は、(図示されるように)球形であり、患者の頭部内に存在するVOIを治療するために定められる。代替として、作業空間130は、他の形状(例えば楕円状)を有し、患者の他の部位内に存在するVOIを治療するために定められてもよい。さらに、複数の作業空間130が、患者の種々の部分について定められ、それぞれが、650mm及び800mmなどの種々の半径又は種々の源−軸間距離(「SAD」)を有している。SADは、照射源105における光子生成のために使用される電子標的と、VOIにより示される標的との間の距離である。SADは、作業空間の表面領域を画定する。楕円状作業空間の一実施形態においては、SADは、900mmから1000mmの範囲に及ぶことがある。他のSADを使用してもよい。
【0027】
空間ノード135は、作業空間130の表面上に存在する。空間ノード135は、照射源105が患者内のVOIに対する放射線量を停止する及び投与することが可能な位置を表す。治療プランの投与の際に、ロボット・アーム125は、予め規定された経路にしたがって、全ての空間ノード135に照射源105を移動させる。一実施形態においては、特定の治療プランが特定の空間ノード135からの放射線量の投与を要さない場合であっても、照射源105は、予め決められた安全経路に沿ってゆくことになるので、特定の空間ノード135に向かう。他の実施形態においては、ロボットは、ノード間における許容可能な移行についてのより詳細な情報を利用して、不使用のノードをスキップする。
【0028】
図5は、例示の個数の空間ノード135を含む完全ノード・セットを図示する。完全ノード・セットは、作業空間130の幾何学的表面上に実質的に一様に分布される空間ノード135を含んでいる。完全ノード・セットは、全てのプログラムされた空間ノード135を含み、殆どの疾患部及び関連付けされるVOIに対する治療プラン解決法を効率的に計算するために使用可能な個数の空間ノード135である。完全ノード・セットは、等質性しきい値及び共形性しきい値が多様な種々のVOIについて達成され、同時に患者内の危険構造を回避するのに十分に有利なポイントを提供することが可能となるように、適度に多数の空間ノード135を与える。完全ノード・セットが、図示される又は説明される個数よりも多い又は少ない空間ノード135を含んでよいことが理解されよう。例えば、処理能力が向上し、得られた経験により治療プランを生成すると、空間ノード135の平均個数は経時的に増加して、より柔軟でより高品質の治療プランを生成することができる。いくつかの実施形態においては、標的は、それらの位置にもとづいて予め規定された空間ノード・セットを有してもよい。典型的には、このセットは、同一又は同様の位置における同様に標的に対する経験を介して見出される。
【0029】
図6は、あるノードでの照射源105の再配向を図示する。上記で説明されたように、照射源105は、任意の空間ノード135に位置決めすることが可能である。さらに、各ノードにおいて照射源を再配向することが可能である。例えば、照射源105は、ノード135において角度α1で第1の配向(配向1)で位置決めする。また、照射源105は、同一のノード135において角度αNで任意の数の配向に再配向する。一実施形態において、照射源105は、各ノード135において12の異なる配向に(12の異なる角度α1〜α12で)再配向することが可能である。照射源105はより少数の配向又はより多数の配向に再配向することが可能であることが理解されよう。図6に図示されるように、ある配向(配向1)は、VOIの中心を貫通する角度で放射線ビームを投与する。他の配向が、VOIの中心を貫通することなくVOI内に放射線ビームを投与し、さらに他の配向が、VOIの外側に放射線ビームを投与する。治療プランニング・システムはVOIの外側に放射線ビームを投与する配向を自動的に排除することが理解されよう。
【0030】
図7A〜図7Cは、治療プランニング・システムにおいて使用するための治療プランを生成するための例示のアルゴリズムを図示する。一実施形態において、このアルゴリズムは、最大線量拘束値を上回る逸脱及び最小線量拘束値を下回る逸脱を最適化する反復アルゴリズムである。この反復プランニング・アルゴリズムは、まず候補ビームのセットを生成し、初期線量分布計算を実施し、その後1つ又は複数のビームのウェイトを変更することにより初期線量分布計算の改善を試みる。他の実施形態においては、このアルゴリズムは、例えばシンプレックス・アルゴリズムなどの凸最適化を実施する。凸最適化により最適化するコスト関数の一例は、最小/最大線量拘束値によって決まる(治療ビームがイネーブルになる総時間量に対して直線的に関係する)モニタ・ユニットの個数である。シンプレックス・アルゴリズムは、当技術分野においてよく知られる。代替として、他の反復最適化アルゴリズムや非反復最適化アルゴリズムが使用されてもよい。一実施形態においては、両方のアルゴリズムの組合せが使用されてもよい。いずれにせよ、ユーザによる標的の描画は、治療プランニング・アルゴリズムと共に使用するために、VOIビット・マスク(すなわち、3D画像の各位置が、所与のVOIがその画像位置に重複する場合には各VOIを表すビットを「1」に設定し、重複しない場合には「0」に設定するように、描画用に使用される3D画像ボリューム上のオーバーレイ)に変換される。
【0031】
通常、治療プランニング・アルゴリズムは、ユーザによる標的特定を要する。典型的には、治療プランニング・アルゴリズムは、組み合わせて患者の3D治療領域を表す2D画像のスタックをユーザに提示し、ユーザが2D画像上で輪郭を特定することを必要とし、この2D画像は次いで組み合わされて3D標的ボリューム(標的VOI)を画定する。一実施形態において、標的特定は、画像空間中での縁部検出と一連のポイントへのその縁部の変換との組合せを含む。次いで、この一連のポイントは、組み合わされて、3D画像の最上部に提示される3D構造を生成する。縁部検出は、Delpら「Edge Detection Using Contour Tracing」(Center for Robotics and Integrated Manufacturing、Robot System Division、College of Engineering University of Michigan RSD−TR−12−83(1983)43)においてより詳細に説明される。ポイントの輪郭描画は、Mat、Ruzinoor Che「Evaluation of Silhouette Rendering Algorithms in Terrain Visualisation」(MSC Computer Graphics and Virtual Environment Dissertation、Computer Science Department、The University of Hull(http:staf.uum.edu.my/ruzinoor/dissertation.htm))においてより詳細に説明される。標的特定のための他のよく知られた方法が、治療プランニング・アルゴリズムにおいて使用されてもよい。
【0032】
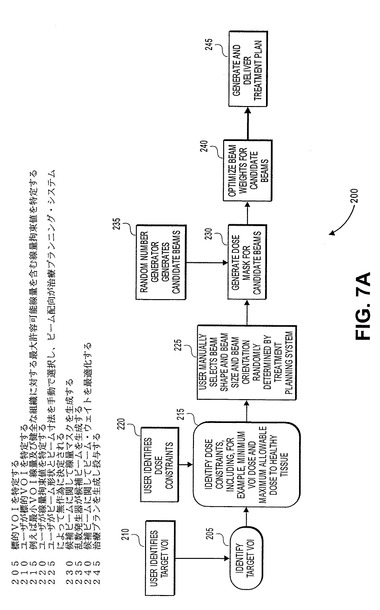
図7Aは、治療プランを生成するためのプロセス200を示す。図7Aに図示される実行例において、プロセス200は、標的VOIを描画することにより開始する(ブロック205)。図7Aに図示される実行例において、ユーザは標的を特定し、システムは標的VOIを生成する(ブロック210)。簡潔にするために、以後このプロセスを「ユーザが標的VOIを特定する」と呼び、ユーザが危険構造VOIを特定することに関しても同様とする。
【0033】
プロセス200は引き続き、ブロック215で線量拘束値を特定する。線量拘束値は、例えば最小標的VOI線量、健全な組織に対する最大許容可能線量、等質性の度合、共形性の度合、総ビーム・オン時間、モニタ・ユニット総数、ビーム数を含むが、これらに限定されない。また、図7Aの実行例において、ユーザは、線量拘束値を特定する(ブロック220)。代替としては、まずユーザが、線量拘束値を特定し、次いで標的VOIを特定するか、又はユーザは、いくつかの線量拘束値を特定し、標的VOIを特定し、次いで他の線量拘束値を特定してもよい。
【0034】
プロセス200は引き続き、ブロック225でユーザが、ビーム形状とビーム寸法を手動で選択する。ビーム形状とビーム寸法を手動で選択することにより、ユーザは、治療実施において使用されるべきコリメータ(又は複数のコリメータ)を手動で選択することになることが理解されよう。ビーム配向が、治療プランニング・アルゴリズムによって無作為に決定される。治療プランニング・アルゴリズムは、VOIビット・マスクと共に乱数発生器を使用して、VOIにおける内部の又は表面のポイントに交差するビームとなる配向を特定する。
【0035】
プロセスは引き続き、ブロック230で線量マスクが、候補ビームに関して生成する。線量マスクは、ビームによって空間内の位置のセットに投与される放射線量の量を表し、ビーム期間に標準化される。線量マスクにおける一例の要素は、例えば(128、203、245)といった患者のCT画像内のボクセル位置、及びビーム・オン時間1秒当たりの1cGyの線量値である。線量マスクを生成するための任意のよく知られたプロセスが使用されてもよい。図7Aの実行例において、候補ビームは無作為に生成される(ブロック235)。治療プランニング・アルゴリズムは、候補ビーム・セットを生成するために、利用可能なビームの数、寸法、位置、配向又はそれらの組合せと共に乱数発生器を使用する。ブロック240で、ビーム・ウェイトが候補ビームに関して最適化される。ビーム・ウェイトを最適化するための任意のよく知られたプロセスが使用される。上記で説明されたように、線量計算及び/又はビーム最適化は、反復アルゴリズム、凸アルゴリズム、又は組合せアルゴリズムである。
【0036】
プロセス200は、ブロック245で治療プランが生成されて終了する。その後、治療プランは、放射線治療システムを使用して患者に適用することができる。一実施形態において、放射線治療システムは、図5に関連して上記で説明された放射線治療システム100である。
【0037】
図7Bは、本発明の一実施形態による、治療プランを生成するための他のプロセス300を示す。図7Bに図示される実行例においては、プロセスは、標的VOIを特定することにより開始する(ブロック305)。図7Bに図示される実行例においては、上述のように、ユーザが標的VOIを特定する(ブロック310)。プロセスは引き続き、ブロック315で線量拘束値を特定する。線量拘束値は、例えば最小標的VOI線量、健全な組織に対する最大許容可能線量、等質性の度合、共形性の度合、総ビーム・オン時間、モニタ・ユニット総数、ビーム数を含むが、それらに限定されない。また、図7Bの実行例においては、ユーザは、線量拘束値を特定する(ブロック320)。代替として、まずユーザは、線量拘束値を特定し、次いで標的VOIを特定するか、又はユーザは、いくつかの線量拘束値を特定し、標的VOIを特定し、次いで他の線量拘束値を特定してもよい。
【0038】
プロセスは引き続き、ブロック325で1つ又は複数のビーム・パラメータが、自動的に決定される。一実施形態においては、ビーム・パラメータ(又は複数のビーム・パラメータ)は、例えばビーム配向、ビーム形状とビーム寸法のうちの1つ又は複数を含む。1つ又は複数のビーム・パラメータを自動的に決定するための例示のアルゴリズムが、以下に開示される。治療プランニング・アルゴリズムがビーム・パラメータ(又は複数のビーム・パラメータ)を自動的に決定するので、治療プランニング・アルゴリズムはまた、適用された線量拘束値を最もよく満たすように、1つ又は複数のコリメータ寸法を自動的に選択することも可能であることが理解されよう。一実施形態において、コリメータ(又は複数のコリメータ)は、固定絞りコリメータ(又は複数の固定絞りコリメータ)である。他の実施形態において、コリメータ(又は複数のコリメータ)は、アイリス・コリメータ(又は複数のアイリス・コリメータ)である。アイリス・コリメータでは、コリメータの絞りの形状は固定されるが、絞りの寸法は、連続的に又は寸法定量増加式に、治療セッションの最中に変えることができる。一実施形態において、IRISコリメータは、ドイツ国ハイデルベルグのDeutsches Krebsforschungszentrum(DKFZ、German Cancer Research Center in Helmholtz Association)により開発されているIRISコリメータである。
【0039】
プロセスは引き続き、ブロック330で線量マスクが候補ビームに関して生成される。線量マスクを生成するための任意のよく知られたプロセスが使用されてもよい。図7Bの実行例において、候補ビームは、ブロック325で決定されたビーム・パラメータ(又は複数のビーム・パラメータ)を使用して決定される。また、候補ビームは、線量拘束値及びVOIビット・マスクを使用して決定されてもよい。ブロック340で、ビーム・ウェイトが候補ビームに関して最適化される。ビーム・ウェイトを最適化するためのよく知られたプロセスが使用される。上述のように、線量計算及び/又はビーム最適化は、反復アルゴリズム、凸アルゴリズム、又は組合せアルゴリズムである。
【0040】
プロセス300は、ブロック345で治療プランが生成されて終了する。その後、治療プランは、放射線治療システムを使用して患者に投与することができる。一実施形態において、放射線治療システムは、図5に関連して上記で説明された放射線治療システム100である。
【0041】
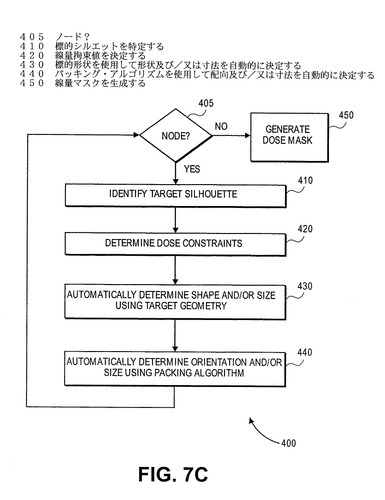
図7Cは、本発明の一実施形態による、1つ又は複数のビーム・パラメータを自動的に決定するための反復プロセス400を示す。図7Cに示されるように、プロセス400は、ブロック405でノードが解析される必要があるかどうかを決定する。図7Cのプロセスにおいて参照されるノードは、図5の空間ノード135である。ノードが解析される必要がある場合(ブロック405)、標的シルエットがブロック410で特定され、線量拘束値がブロック420で決定され、形状及び/又は寸法がブロック430で標的の形状を使用して自動的に決定され、配向及び/又は寸法がブロック440でパッキング・アルゴリズムを使用して自動的に決定される。プロセスは、ブロック405に戻り、残りのノードがなくなるまで各ノードでプロセス自体を繰り返す。残りのノードがなくなると、プロセスはブロック450へと続き、線量マスクが生成される。
【0042】
標的形状を使用して形状及び/又は寸法を決定するための例示のプロセスと、パッキング・アルゴリズムを使用して配向及び/又は寸法を決定するための例示のプロセスとが、以下で開示される。また、図7Cの反復プロセスがより少数のステップ又はより多数のステップを含んでよいことが理解されよう。例えば、反復プロセスは、各ノードでのビーム配向、形状と寸法のうちの1つ又は複数を自動的に決定することをのみを含んでよい。また、反復プロセスにおけるステップの順序は変更することが理解されよう。例えば、配向及び/又は寸法は、形状及び/又は寸法が標的形状を使用して決定される前に、パッキング・アルゴリズムを使用して決定されてもよい。
【0043】
また、治療プランニング・アルゴリズムはユーザ選択(図7A)及び自動決定(図7B及び図7C)の組合せを含むことが理解されよう。例えば、ユーザはビーム寸法とビーム形状を手動で選択するが、治療プランニング・アルゴリズムがビーム配向を自動的に決定してもよい。他の例では、ユーザはビーム形状を手動で選択し、治療プランニング・アルゴリズムがビーム寸法とビーム配向を自動的に決定してもよい。さらに、システムの制約条件により、コリメータの数が固定されることがある。コリメータ寸法が、固定されてもよく(例えば単一のコリメータ寸法)、又は離散的な寸法のセットに限定されてもよい。連続変動可能に寸法設定されるビームを有する構成が、最も近い許容されるコリメータ寸法(又は複数の寸法)に揃えられてもよい。
【0044】
図7B及び図7Cを参照して上記で説明されるように、治療プランは、1つ又は複数のビーム・パラメータを自動的に決定することを含む。図8A〜図10Bは、ビーム・パラメータ(又は複数のビーム・パラメータ)を自動的に決定するための例示のアルゴリズムの一態様を図示する。
【0045】
図8A〜図8Kは、パッキング・アルゴリズムを使用してビーム・パラメータを自動的に決定するための例示のプロセスの一態様を図示する。放射線治療プランニング・システムのパッキング・アルゴリズムにおいてVOIをパックするために使用される物体は、放射線ビームの断面に対応する。さらには、放射線ビームは、1つ又は複数のコリメータにより生成される放射線断面に対応する。したがって、パッキング物体は、1つ又は複数のビーム・パラメータを定義する。ビーム・パラメータ(又は複数のビーム・パラメータ)は、1つ又は複数のコリメータを自動的に選択するために使用することが可能である。例えば、パッキング物体の寸法はコリメータの寸法を決め、パッキング物体の形状はコリメータの形状を決める。同様に、パッキング形状の中心がコリメータの配向を決め、この配向はノードからパッキング形状の中心に線を取ることによって決められる。
【0046】
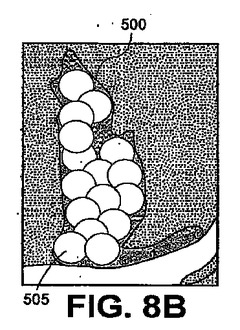
(同等寸法の円についての)ペニー・パッキング・アルゴリズム又は(異なる寸法の円についての)円パッキング・アルゴリズムなどのパッキング・アルゴリズムが、非重複円で標的のシルエットなどの物体を最もよく充填する円のセットを生成する。図8Aは、標的(VOI)500を示し、これは、ペニー・パッキング・アルゴリズムにしたがって、重複が可能でない状態でVOI500内に配置された複数の円505を有する。代替のパッキング・アルゴリズムでは、物体内に重複円のセットの結合体がある。図8Bは、重複ペニー・パッキング・アルゴリズムを図示する。図8Bにおいて、円505は、各円の少なくとも一部分が他の円に重複するように標的500内に配置される。重複の度合が図8Bに図示されるものと異なってよいことが理解されよう。例示の円パッキング・アルゴリズムは、Collinsら「A circle packing algorithm」(Computational Geometry 25(2003)233〜356)、及びChenら「Algorithms for Congruent Sphere Packing and Applications」(SCG’01(2001)212〜221)に記載される。代替として、当技術分野で知られている他のパッキング・アルゴリズムが使用されてもよい。
【0047】
円(又は他のパッキング物体)は、固定寸法でも又は複数の寸法でもよい。図8Cは、パッキング・アルゴリズムにより種々の寸法のパッキング物体を使用できることを示す。図8Cは、第1の寸法を有する円510、第2の寸法を有する円515、第3の寸法を有する円520を有するVOI500を示す。図8Cにおいて、円510は、円515よりも大きく、円515は円520よりも大きい。3つより少ない又は3つより多い数の寸法がパッキング・アルゴリズムにより使用されてよく、寸法は図示される寸法と異なってよいことが理解されよう。
【0048】
パッキング・アルゴリズムにおいて使用される物体の寸法は、所与のコリメータ寸法に対する(例えば線量マスクにより表されるような)予想される線量分布の断面を検査することによって決定することができる。例えば、30mmのコリメータ直径を有するビームについて線量マスクの断面を取り、1cGy/秒を上回る値を有する断面における全要素を取ることによって、15mmの半径を有する円へ近似することができる。
【0049】
上記で説明されたように、パッキング・アルゴリズムは、重複アルゴリズムであってもよい。中心軸変換が、例示の重複パッキング・アルゴリズムである。中心軸変換は、最大内接円盤の中心の軌跡である。最大内接円盤は、物体内の任意の他のポイントに中心を有する他のいずれの内接円盤内にも完全には包含されない、最も近い境界ポイントへの距離に等しい半径を有する円盤である。全ての最大内接円盤のセットの結合体が、物体自体(すなわちVOI)となる。スケルトンと全スケルトン・ポイントでの最大円盤の半径とを足したものが、対称軸変換である。例示の中心軸変換アルゴリズムは、Geら「On the Generation of Skeletons from Discrete Euclidean Distance Maps」(IEEE Transactions on Pattern Analysis and Machine Intelligence、Vol.18、No.11(1996)1055〜1066)に記載される。代替として、当技術分野において知られる他の中心軸変換アルゴリズム又は非重複アルゴリズムが使用されてもよい。
【0050】
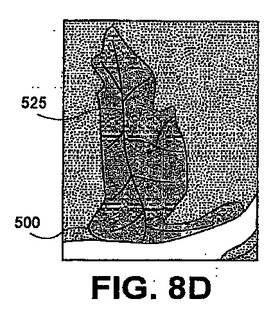
図8D及び図8Eは、VOIに関する中心軸変換を図示する。図8Dは、中心軸変換アルゴリズムを使用してスケルトン525が中に形成される、変則的形状を有するVOI500を示す。図8Eは、単純な標的形状に関する中心軸変換アルゴリズムを図示する。中心軸変換アルゴリズムがより複雑な標的形状に使用されてもよく、単純な標的形状は説明の容易化のために使用されているにすぎないことが理解されよう。図8Eにおいて、VOI500aは、スケルトン525aを含む。円505aは、スケルトン525aに沿い配置される。スケルトン525aが使用されて、可能な円505aのセットを決定する。次いで、アルゴリズムが、線量拘束値にもとづき、これらの円505aのいずれが線量拘束値を満たすために使用可能であるかを決定する。例えば、アルゴリズムが100個の円505aを特定する場合、アルゴリズムは、治療目的のために5つの円505aだけを、したがって対応するコリメータの寸法と配向をだけを選択してもよい。さらに、重複の最大量を特定することが可能であり、及び/又はいくつかの円505aを排除するために、非カバー領域の最大量を、ユーザが決める、又は等質性、最大線量、共形性などの線量拘束値にもとづいて計算することが可能である。
【0051】
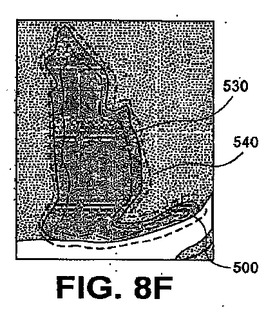
図8Fは、標的シルエット530の第1の輪郭と、標的シルエット540の第2の輪郭とを有するVOI500を示す。標的のシルエット530の第1の輪郭は、実シルエット500とは対照的に、例えばユーザが共形性を求める場合にパッキング・アルゴリズムで使用することが可能である。標的シルエット540の第2の輪郭は、実シルエット500とは対照的に、例えばユーザが線量等質性を求める場合にパッキング・アルゴリズムで使用することが可能である。
【0052】
図8Gは、パッキング・アルゴリズムに対するビームの浸食と膨張の適用を図示する。図8Gにおいて、VOI500bは、円505bを含み、各円は、円530bの第1の輪郭及び円540bの第2の輪郭を有する。第1の輪郭530bは放射線ビームの浸食に対応し、第2の輪郭540bは放射線ビームの膨張に対応する。浸食と膨張により、それぞれ重複パッキング・アルゴリズムが非重複アルゴリズムとなり、非重複アルゴリズムが重複アルゴリズムとなることがある。
【0053】
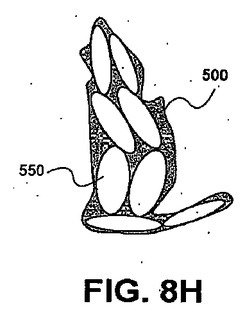
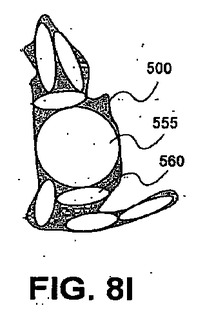
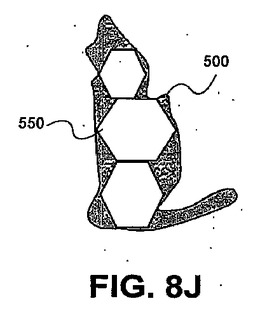
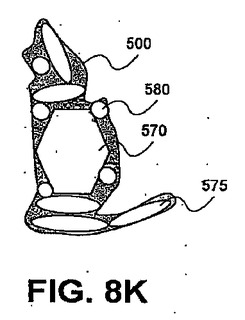
図8H〜図8Kは、種々の形状と形状の組合せを有するパッキング物体を用いるパッキング・アルゴリズムを図示する。一実施形態において、パッキング物体の形状は、幾何プリミティブである(すなわちコリメータの形状は幾何プリミティブである)。例示の幾何プリミティブは、例えば円、楕円、六角形、正多角形、不等辺多角形(例えば不等辺四辺形)を含む。
【0054】
図8Hは、楕円形状放射線ビーム(すなわち楕円形状コリメータ)に対応する楕円500をパックされたVOI500を示す。図8Iは、円555と楕円560をパックされたVOI500を示す。図8Jは、六角形565をパックされた標的500を示す。図8Kは、六角形570、楕円575、円580をパックされた標的500を示す。治療プランニング・アルゴリズムにおいて使用される形状タイプ、形状の組合せなどは、図8H〜図8Kに図示されるものと異なってよいことが理解されよう。
【0055】
図8A〜図8Hに示されるように、種々の寸法及び/又は形状の、及び/又は種々の配向でのコリメータの使用が、変則的形状の標的に関して特に有利である。例えば、大型コリメータは、標的の中心部に迅速に線量を投与することが可能であり、一方より小型のコリメータは外縁の変則的形状に合致するように線量を投与することが可能である。さらに、種々の寸法及び/又は形状の、及び/又は種々の配向でのコリメータの使用により、より効果的な治療プランニングを得ることが可能となる。
【0056】
図9A及び図9Bは、1つ又は複数のビーム・パラメータが標的(VOI)600の形状を使用して自動的に決定される例示のアルゴリズムを図示する。例示のアルゴリズムは、Alpertら「The Principal Axes Transformation−A Method for Image Registration」(J Nucl Med 1990;31:1717〜1722)に開示される。上述のように、ビーム・パラメータは、1つ又は複数のコリメータを選択することになる。コリメータは、特徴的な幾何学的寸法及び/又は特徴的な形状測定値に応じて選択される。最小主軸と最大主軸の比、偏心率の様々な測定値、(同一ボリュームの球の表面/ボリューム比への標準化を伴う又は伴わない)表面/ボリューム比を含む、様々な形状測定値を使用することが可能である。
【0057】
図9Aは、質量中心605を有するVOI600を示す。コリメータが、質量中心605で標的600の中心に示される。質量中心605から始まる座標系615が示される。一実施形態においては、コリメータは、特徴的な幾何学的寸法の具体的なパーセンテージとして選択される。例えば、ユーザ描画標的の主要軸(主軸)が決定され、コリメータが最小主軸の具体的なパーセンテージとして選択される。図示される実施形態において、主軸は座標系615によって表され、最小主軸は軸620によって表される。一実施形態において、コリメータ寸法は、最小主軸の100%〜200%であってもよい。また、コリメータ寸法は、最小主軸の100%未満であってよいことが理解されよう。
【0058】
図9Bは、標的600の中心を貫通する軸625を示す。複数の軸630が、軸625に対して垂直に示される。一実施形態において、軸630は、標的625の二乗平均平方根解析において使用される。二乗平均平方根解析は、ビーム寸法の特定において有効である。
【0059】
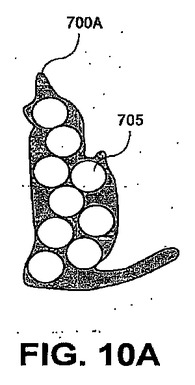
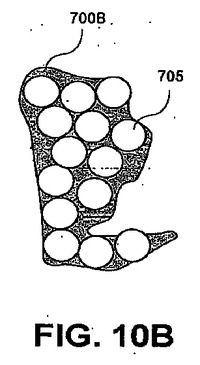
治療プランニング・アルゴリズムは、使用可能なコリメータに対応する1つ又は複数の特徴的な寸法(例えば1つ又は複数の直径の円)の幾何プリミティブ(すなわちパッキング物体形状)が、線量拘束値の条件の下でVOIを最適に充填する又はパックするように、1つ又は複数のコリメータ寸法を見出すように各ノード位置からVOIを解析する。図10A及び図10Bは、2つの異なるノード位置から標的(VOI)を示す。図10Aは、第1の位置からVOI700aを示し、図10Bは、第2の位置からVOI700bを示す。同一のVOIは、位置によって異なる形状を有する。VOI700a及び700bは共に、円705をパックされて示されるが、VOI700bは、VOI700aに比べてより効果的にパックされる。上述のように、パッキング物体の形状とその寸法は、コリメータの形状と寸法に対応し、VOI内におけるその位置は、各ノード位置で候補ビームを生成するために使用されるビーム配向に対応する。
【0060】
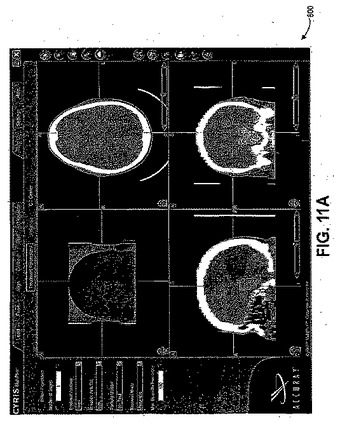
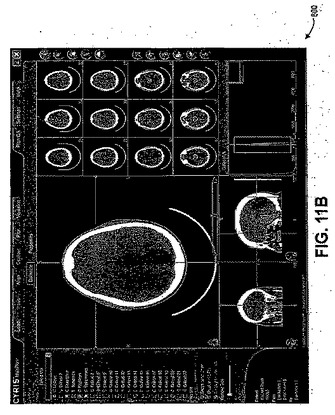
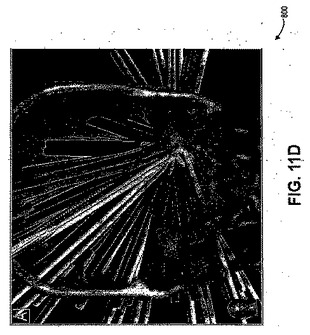
図11A〜図11Eは、治療プランニング・システムのためのユーザ・インターフェース800の例示のスクリーン・ショットである。ユーザ・インターフェース及びスクリーン・ショットは、図示され説明されるものと異なってよいことが理解されよう。図11Aに示されるように、治療領域の画像が治療プランニング・システム内にロードされる。図11Bは、標的の断面を含む種々の2D画像スライスを示す。図11Cに示されるように、ユーザは、上述のように、ユーザ・インターフェース800に様々な線量拘束値を入力する。図11Dは、本明細書にて説明されるアルゴリズムを使用して生成される標的に対する治療プランを示す。図11Eは、標的に対する治療プランを示し、コリメータ寸法が自動的に選択される。代替として、ユーザは、提案コリメータ寸法(又は複数の寸法)の提示を受けることができ、提案コリメータ寸法(又は複数の寸法)を受け入れる及び/又は修正することが可能である。
【0061】
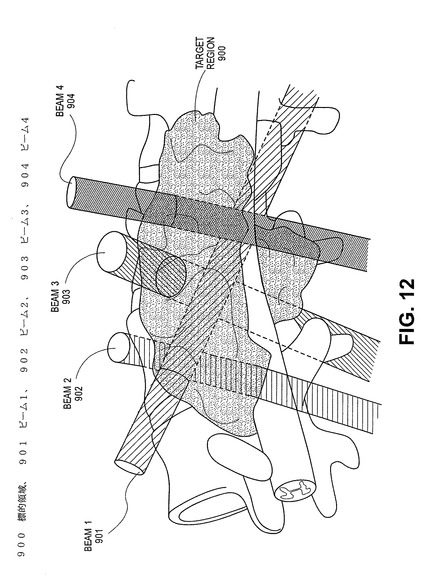
本発明の実施形態は、治療プランを展開するために、順方向プランニング技法及び逆方向プランニング技法(例えばアイソセントリック・ビーム形状及び非アイソセントリック・ビーム形状、又はコンフォーマル・ビーム形状)の両方又はいずれかと共に使用されることに留意すべきである。図12は、コンフォーマル・プランニングにもとづく標的領域での非アイソセントリック放射線ビーム投与の2次元斜視図を示す。4つのビーム、すなわちビーム_1 901、ビーム_2 902、ビーム_3 903、ビーム_4 904が、説明の容易化のためだけに図12に図示され、実際の治療プランは、4つのビームよりも多い又は少ないビームを含んでよいことに留意すべきである。さらに、4つのビームは、コンフォーマル・プランニングを表し、各ビームは、標的領域900(例えば病理構造体)内の様々なポイントを貫通する。コンフォーマル・プランニングにおいて、いくつかのビームは、共通ポイントで交差又は集束してよく、あるいはしなくてよく、4つのビームは図12の斜視図においては交差して見えるが、ビームはその実際の3次元空間内においては交差しない。放射線ビームは、標的ボリュームとの交差のみを要し、標的900内における単一ポイント又はアイソセンタに必ずしも集束しない。一実施形態においては、コンフォーマル・プランニングはCyberKnife(登録商標)システムなどの(例えば放射線外科手術を実施するための)画像誘導ロボット・ベース放射線治療システムを利用するが、その理由は、LINAC位置指定機構(例えば図14のロボット・アーム3012)が、複数の自由度で自在に動き回るとともに、LINACの放射線ビームを空間中の任意の位置に向けることを可能にすることができるからである。
【0062】
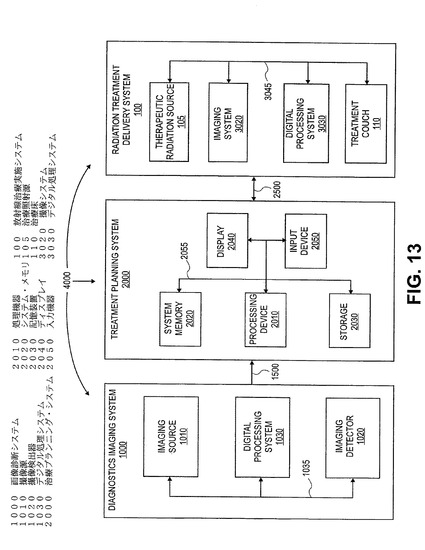
図13は、放射線治療を実施するために使用され、本発明の機能を実行できるシステムの一実施形態を図示する。以下に説明されるように、及び図13に図示されるように、システム4000は、画像診断システム1000、治療プランニング・システム2000、治療実施システム100を含んでいる。画像診断システム1000は、その後の医療診断、治療プランニング及び/又は治療実施のために使用する、患者内の治療領域の医療診断画像を生成することが可能な任意のシステムでよい。例えば、画像診断システム1000は、コンピュータ断層撮影(CT)システム、磁気共鳴画像(MRI)システム、陽電子放射断層撮影(PET)システム又は超音波システムなどである。説明の容易化のために、画像診断システム1000は、コンピュータ断層撮影X線撮像法に関連して折に触れて以下で説明される。しかし、上記のような他の撮像法が使用されてもよい。
【0063】
画像診断システム1000は、撮像ビーム(例えばX線、超音波、高周波など)を生成するための撮像源1010と、撮像源1010により生成されるビーム、又は(例えばMRI又はPETスキャンにおいて)撮像源からのビームにより誘発される2次ビーム若しくは放射を検出し受けるための撮像検出器1020とを含む。一実施形態において、画像診断システム1000は、2つ又はそれ以上の診断X線源と、2つ又はそれ以上の対応する撮像検出器とを含んでよい。例えば、2つのX線源は、撮像されるべき患者の周囲に配置され、互いからある角距離で固定され(例えば90度、45度など)、X線源の正反対に位置してよい撮像検出器(又は複数の撮像検出器)の方向に患者を貫通して照準を定める。X線撮像源により照射される単一の大型撮像検出器又は複数の撮像検出器が使用されてもよい。代替として、他の個数及び構成の撮像源及び撮像検出器が使用されてもよい。
【0064】
撮像源1010と撮像検出器1020は、撮像動作を制御し画像データを処理するために、デジタル処理システム1030に結合される。画像診断システム1000は、デジタル処理システム1030、撮像源1010、撮像検出器1020の間でデータとコマンドを転送するための、バス又は他の手段1035を含む。デジタル処理システム1030は、1つ又は複数の汎用プロセッサ(例えばマイクロプロセッサ)、デジタル信号プロセッサ(DSP)などの専用プロセッサ、又は制御装置若しくはフィールド・プログラマブル・ゲート・アレイ(FPGA)などの他のタイプの機器を含んでよい。また、デジタル処理システム1030は、メモリ、記憶機器、ネットワーク・アダプタなどの他の構成要素(図示せず)を含んでよい。デジタル処理システム1030は、例えばDICOM(医用におけるデジタル画像と通信)フォーマットなどの規格フォーマットにおいてデジタル診断画像を生成するように構成されてもよい。他の実施形態において、デジタル処理システム1030は、他の規格デジタル画像フォーマット又は非規格デジタル画像フォーマットを生成してもよい。デジタル処理システム1030は、データ・リンク1500を介して治療プランニング・システム2000に診断画像ファイル(例えば上述のDICOMフォーマットのファイル)を送信でき、データ・リンク1500は、例えば直接リンク、ローカル・エリア・ネットワーク(LAN)リンク又は、インターネットなどのワイド・エリア・ネットワーク(WAN)リンクであってもよい。さらに、システム間で転送される情報は、遠隔診断又は治療プランニング構成などにおけるように、システムを接続する通信媒体間で引き出す又は送り込むことができる。遠隔診断又は治療プランニングにおいて、ユーザは、システム・ユーザと患者との間に物理的離間があるにもかかわらず、診断する又は治療プランニングするために本発明の実施形態を使用することができる。
【0065】
治療プランニング・システム2000は、画像データを受信し処理するために処理機器2010を含む。処理機器2010は、1つ又は複数の汎用プロセッサ(例えばマイクロプロセッサ)、デジタル信号プロセッサ(DSP)などの専用プロセッサ又は、制御装置若しくはフィールド・プログラマブル・ゲート・アレイ(FPGA)などの他のタイプの機器を表している。処理機器2010は、例えば記憶装置2030及び/又はシステム・メモリ2020から処理機器2010内にロードする、本明細書にて説明される治療プランニング・システム2000の操作を実施するための命令を実行するように構成することができる。
【0066】
また、治療プランニング・システム2000は、情報及び処理機器2010によって実行されるべき命令を記憶するための、バス2055により処理機器2010に結合されるランダム・アクセス・メモリ(RAM)又は他の動的記憶機器を含むシステム・メモリ2020を含んでいる。また、システム・メモリ2020は、処理機器2010が命令を実行する際の一時変数又は他の中間情報を記憶するために使用される。また、システム・メモリ2020は、静的情報及び処理機器2010に対する命令を記憶するための、バス2055に結合されるリード・オンリー・メモリ(ROM)及び/又は他の静的記憶機器を含んでもよい。
【0067】
また、治療プランニング・システム2000は、情報と命令を記憶するために、バス2055に結合される1つ又は複数の記憶機器(例えば磁気ディスク・ドライブ又は光ディスク・ドライブ)に相当する記憶機器2030を含んでいる。記憶機器2030は、本明細書にて説明される治療プランニング方法を実施するための命令を記憶するために使用することができる。
【0068】
また、処理機器2010は、ユーザに情報(例えばVOIの2次元又は3次元図)を表示するために、陰極線管(CRT)又は液晶ディスプレイ(LCD)などのディスプレイ・機器2040に結合されている。キーボードなどの入力機器2050が、処理機器2010に情報及び/又はコマンド選択を通信するために、処理機器2010に結合されている。また、1つ又は複数の他のユーザ入力機器(例えばマウス、トラックボール又はカーソル方向キー)が、方向情報を通信するために、処理機器2010に対してコマンドを選択するために及びディスプレイ2040上でカーソルの移動を制御するために使用されている。
【0069】
治療プランニング・システム2000は、治療プランニング・システムの単なる一例を表すにすぎず、これは多くの種々の構成やアーキテクチャを有してよく、これは治療プランニング・システム2000に比べより多くの構成要素又はより少ない構成要素を含み、それを本発明と共に使用してよいことが理解されよう。例えば、いくつかのシステムは、例えば周辺バス、専用バスなどの複数のバスを有する。また、治療プランニング・システム2000は、DICOMインポート(それによって画像を融合し、標的を種々のシステム上で描画し、次いでプランニング及び線量計算のために治療プランニング・システム中にインポートすることが可能となる)、ユーザが治療プランニングを行い多様な撮像法(例えばMRI、CT、PETなど)の任意の1つにもとづき線量分布を目視確認することを可能にする拡張された画像融合能力をサポートするためにMIRIT(医用画像レビュー・インポート・ツール)を含んでもよい。治療プランニング・システムは当技術分野において知られており、したがって、より詳細な説明は提示しない。
【0070】
治療プランニング・システム2000は、治療実施システム100などの治療実施システムとそのデータベース(例えば記憶機器2030に記憶されたデータ)を共有し、それにより治療実施の前に治療プランニング・システムからのエクスポートをする必要をなくすことができる。治療プランニング・システム2000は、データ・リンク2500を介して治療実施システム100に結合され、データ・リンク2500は、データ・リンク1500に関して上述したものである直接リンク、LANリンク又はWANリンクである。データ・リンク1500、2500がLAN接続又はWAN接続として実装される場合、任意の画像診断システム1000、治療プランニング・システム2000及び/又は治療実施システム100は、それらのシステムが互いから物理的に離れることが可能となるように分散した位置に置くことができることに留意すべきである。代替として、任意の画像診断システム2000、治療プランニング・システム2000及び/又は治療実施システム100を、1つ又は複数のシステムに互いに統合してもよい。
【0071】
治療実施システム100は、治療プランにしたがって標的ボリュームに予め決められた放射線量を与えるための治療的及び/又は外科的照射源105を含む。また、治療実施システム100は、照射源に対して患者を位置決めするために、上述の診断画像とのレジストレーション又は対比用の患者のボリューム(標的ボリュームを含む)の治療中画像をキャプチャするための撮像システム3020を含んいる。また、治療実施システム100は、照射源105や撮像システム3020を含み、さらに治療床110などの患者支持機器を制御するためのデジタル処理システム3030を含んいる。デジタル処理システム3030は、1つ又は複数の汎用プロセッサ(例えばマイクロプロセッサ)、デジタル信号プロセッサ(DSP)などの専用プロセッサ又は、制御装置若しくはフィールド・プログラマブル・ゲート・アレイ(FPGA)などの他のタイプの機器を含んでもよい。また、デジタル処理システム3030は、メモリ、記憶機器、ネットワーク・アダプタなど他の構成要素(図示せず)を含んでよい。デジタル処理システム3030は、バス3045又は他のタイプの制御及び通信インタフェースによって、照射源105、撮像システム3020、治療床110に結合される。
【0072】
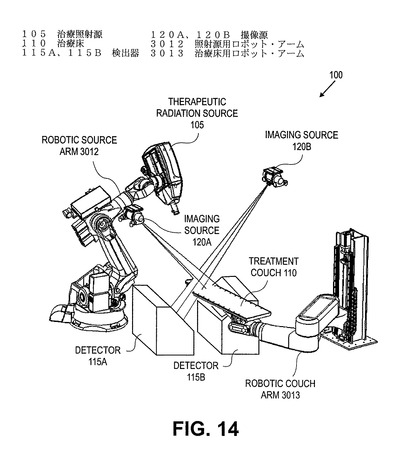
一実施形態においては、図14に図示されるように、治療実施システム100は、カリフォルニア州のAccuray社によって開発されたCyberKnife(登録商標)システムなどの(例えば放射線外科手術を実施するための)画像誘導ロボット・ベース放射線治療システムである。図14において、照射源105は、直線加速器(LINAC)で表され、この直線加速器(LINAC)は、患者の周囲の作業ボリューム(例えば球)において多数の角度から投与されるビームで病理構造体(標的領域又はボリューム)を照射するようにLINACを位置決めするために、複数の(例えば5又はそれ以上)自由度を有するロボット・アーム3012の端部に取り付けられる。治療は、単一のアイソセンタ(集束ポイント)を有するビーム経路、複数のアイソセンタを有するビーム経路又は非アイソセンタ・アプローチによるビーム経路を含む(すなわちビームは、病理標的ボリュームと交差する必要があるにすぎず、図12に図示される標的領域内の単一のポイント、又はアイソセンタに必ずしも集束するわけではない)。治療は、治療プランニングの際に決定されるとおりに、単一セッション(単一フラクション)又は少数セッションのいずれかで実施することが可能である。治療実施システム100により、一実施形態において、術前治療プランニング段階中に標的ボリュームの位置に対する標的ボリュームの術中位置のレジストレーションを行うために堅い外部フレームに患者を固定することなく、放射線ビームを治療プランにしたがって投与することが可能となる。
【0073】
図14において、撮像システム3020は、X線源120A、120B、並びにX線画像検出器(撮像装置)115A、115Bで表されている。一実施形態において、例えば、名目上、2つのX線源120A、120Bは、2つの異なる角位置(例えば、90°、45°などで分離された)から患者を貫通して撮像X線ビームを投射するように整列させられ、治療床110の上の患者を貫通して検出器115A、115Bそれぞれに向けて照準を定められる。他の実施形態では、各X線撮像源によって照射される単一の大型撮像装置を使用することが可能である。代替として、他の数や構成の撮像線源及び撮像装置を使用してもよい。
【0074】
デジタル処理システム3030は、治療実施システム100内で治療床110上の患者を整列させるために術前治療プランニング画像に対する撮像システム3020より取得された画像のレジストレーションを行い(すなわち、術前治療プランニング画像と撮像システム3020より取得された画像との共通座標系を決定し)、標的ボリュームに対して照射源を正確に位置決めするためのアルゴリズムを実行する。
【0075】
治療床110は、複数の(例えば5又はそれ以上)自由度を有する他のロボット・アーム(図示せず)に結合されている。治療床アームは、5の回転自由度と、1の実質的に垂直方向の直線自由度とを有している。代替として、治療床アームは、6の回転自由度と、1の実質的に垂直方向の直線自由度又は少なくとも4の回転自由度とを有してもよい。治療床アームは、柱又は壁に垂直に取り付けられて、あるいは台、床、又は天井に水平に取り付けられてもよい。代替として、治療床110は、カリフォルニア州のAccuray社によって開発されたAxum(登録商標)治療床などの別の機械的機構の構成要素、又は当業者に知られる他のタイプの従来式の治療台である。
【0076】
本明細書において説明された方法及び装置は、医用画像診断及び治療での使用のみに限定されないことに留意すべきである。代替的な実施形態において、本明細書における方法及び装置は、産業用撮像、材料(例えば自動車産業における内燃機関ブロック、航空機産業における機体、建設業における溶接部及び石油産業におけるドリル・コア)の非破壊試験及び地震調査などの、医療技術分野以外の用途において使用する。そのような用途においては、例えば「治療」は、ビーム(例えば放射線、音響など)の適用などの、治療プランニング・システムによって制御される作業の実施を概して指す。
【0077】
上述の明細書において、本発明は、その特定の例示的な実施形態に関して説明された。しかし、添付の特許請求の範囲において述べられる本発明のより広い精神及び範囲を逸脱することなく、多様な修正及び変更をそれらになすることは明らかである。したがって、明細書及び図面は、限定的な意味ではなく例示的な意味において考慮されるべきである。
【図面の簡単な説明】
【0078】
【図1】病理構造体に合致するように調節されるマルチリーフ・コリメータの平面図である。
【図2】CT画像のスライスを表示する治療プランニング・ソフトウェアのグラフィカル出力の概略図である。
【図3】病理構造体に関する理想DVHを示すグラフである。
【図4】危険領域に関する望ましいDVHを示すグラフである。
【図5】本発明の一実施形態による空間ノードを有する放射線治療システムの斜視図である。
【図6】本発明の一実施形態による種々の配向のコリメータの斜視図である。
【図7A】治療プランニング・アルゴリズムの一実行例の流れ図である。
【図7B】本発明の一実施形態による治療プランニング・アルゴリズムの一実行例の流れ図である。
【図7C】本発明の一実施形態による空間ノードでの先最適化を示す流れ図である。
【図8A−K】本発明の実施形態による先最適化アルゴリズムを示す概略図である。
【図9】本発明の実施形態による先最適化アルゴリズムを示す概略図である。
【図10】本発明の実施形態による先最適化アルゴリズムを示す概略図である。
【図11A−E】本発明の一実施形態による治療プランニング・アルゴリズムに対応するユーザ・インターフェースのスクリーン・ショットである。
【図12】本発明の一実施形態による病理構造体での非アイソセントリック放射線ビーム投与の斜視図である。
【図13】本発明の一実施形態による画像診断及び/又は治療実施のためのシステムのブロック図である。
【図14】本発明の一実施形態による画像診断及び/又は治療実施のためのシステムの斜視図である。
【関連出願】
【0001】
(関連出願の相互引用)
本出願は、2006年4月7日に出願された米国特許仮出願第60/790,503号に対する優先権を主張し、その全体が参照により本明細書に組み込まれる。
【技術分野】
【0002】
本発明の実施形態は、概して放射線治療に関し、より詳細には放射線治療における治療プランニングに関する。
【背景技術】
【0003】
腫瘍や病変は、何ら生理学的機能を果たさない、細胞の抑制不能な進行性の増殖によりもたらされる組織の異常な成長により特徴付けられるタイプの病理構造体である。病理構造体は、外科手術などの侵襲的手法を用いて治療することが可能であるが、これは、患者にとっては有害かつリスクが高い。病理構造体(例えば腫瘍、病変、血管奇形、神経障害など)の治療のための非侵襲的な方法が、外からのビーム照射療法である。あるタイプのビーム照射療法においては、外照射源は、複数の角度から腫瘍部位に一連のX線ビームを向けるように使用され、患者は、腫瘍がこのビームの経路中に位置するように位置決めされる。この照射源の角度が変わるごとに、各ビームは腫瘍部位を貫通するが、腫瘍部位への途中で健全な組織である異なる部位を貫通する。その結果、腫瘍での集積線量は高く、健全な組織に対する平均線量は低くなる。
【0004】
「放射線療法」という用語は、放射線が壊死目的ではなく治療目的で標的領域に加えられる放射線治療技法を意味する。通常、放射線療法の治療セッションにおいて使用される放射線量は、放射線外科手術セッションにおいて使用される量と比較して約1桁低い。典型的に、放射線療法は、1治療あたりの線量の低さ(例えば100〜200センチグレイ(cGy))、治療時間の短さ(例えば1治療あたり10〜30分)及び通常分割照射又は過分割照射(例えば30〜45日間の治療)により特徴付けられる。便宜上、本明細書において、「放射線治療」という用語は、特に放射線の大きさに関して言及しない限り、放射線外科手術及び/又は放射線療法を意味するために用いられる。
【0005】
健全な組織に対する照射線量を最小限にし、センシティブな危険構造を回避しつつ、標的領域へ必要な線量を投与するために、適切な治療プランニング・システムが必要とされる。治療プランは、適用される放射線ビームの方向や強度などの量と、ビームの露光期間とを指定する。治療プランは、(目下、臨床目的で必要とされる)指定された線量が腫瘍に投与されるとともに、周囲の健全な組織に対する、特にあらゆる隣接する重要な器官に対する過剰線量を回避するように、設計されることが望ましい。適切な治療プランニング・システムの開発は、より大型の、変則的形状を有する又は、センシティブな若しくは危険な構造付近に存在する腫瘍に関しては、特に困難である。
【0006】
通常、治療プランは、ビーム位置、ビーム配向、ビーム形状、ビーム強度、所望の放射線量拘束値などの(特定の臨床目的を達成するために放射線科医が必要と見なす)入力パラメータより生成する。洗練された治療プランが、高度なモデリング技術や先端技術による最適化アルゴリズムを使用して展開される。
【0007】
2種類の治療プランニング技法、すなわち順方向プランニングと逆方向プランニングが知られている。初期の放射線治療においては、治療プランニング・システムは、順方向プランニング技法に関心が集中する傾向があった。順方向治療プランニングにおいては、医学物理学者が、放射線量期間、ビーム・オン時間、選択されたビームの軌道を決定し、次いで放射線が腫瘍、危険構造(すなわち重要な器官)、他の健全な組織によってどのくらい吸収されるかを計算する。あるボリュームの組織における放射線吸収量は、その組織の特性と、ビーム発生源及びビーム軸までのこのボリュームにおける各ポイントの距離とによって決定されるので、所与数のビームに関して腫瘍や他の構造に対する線量レベルを個別に制御することはあり得ない。より詳細には、医学物理学者は、自身の経験にもとづいて、ビーム位置やビーム強度などの様々な治療パラメータに対する値を「推測」し、又は割り当てる。次いで、治療プランニング・システムは、そこから得られた線量分布を計算する。得られた線量分布を再検討した後、医学物理学者は、治療パラメータの値を調整する。システムは、新しく得られた線量分布を再び計算する。このプロセスは、医学物理学者が自身の所望する分布と比較して、得られた線量分布に満足するまで繰り返される。順方向プランニングは、ビーム方向と線量ウェイトの多様な選択肢にわたって繰り返して行い、得られた線量分布を適切に評価するユーザの能力に依存する傾向がある。ユーザの経験度がより高いほど、満足のゆく線量分布が得られる可能性がより高い。
【0008】
しばしば、順方向プランニングはアイソセントリック治療プロセスを使用するが、このアイソセントリック治療プロセスにおいては、外照射源は複数の角度から腫瘍標的に一連のX線ビームを向けるように使用され、患者はこの腫瘍がビームの回転中心(アイソセンタ)に位置するように位置決めされる。アイソセントリック・プランニングにおいては、利用可能なビームがそれぞれ、「アイソセンタ」を形成するように同一ポイントに照準を定められるが、概してこのアイソセンタは、球によって表されるほぼ球形の等線量領域である。したがって、アイソセントリック・プランニングは、実質的に規則的な(例えば球形の)形状を有する腫瘍を治療する際に適用されることが多い。放射ビームは、コリメータと呼ばれる機器によって形状設定される。コリメータは、放射線に対して不透過性の高密度物質から構成されるが、例外として放射線が貫通し得る中空部分が存在する。さらに、この放射線ビームの形状と寸法は、この中空部分(絞り)の形状と寸法によって決定される。「コリメータ寸法」と言う場合、所与のコリメータ構成によって生成される放射線ビームの寸法を意味し、これは、照射源からの所与の距離で測定される。したがって、アイソセントリック・プランニングにおける放射線量からなる球の寸法は、例えば照射源から約800ミリメートルの位置で測定される場合に約30ミリメートルであるコリメータ寸法に依拠する。この照射源の角度が変わるごとに、各ビームは腫瘍を貫通するが、腫瘍への途中で健全な組織である異なる部位を貫通する。標的である病理構造体を治療するために、複数の線量球が、病理構造体のシルエットに忠実に一致する輪郭を取得するために、互いに重ね合わされ、すなわち「スタックされ」る。標的ボリューム内でアイソセンタをスタックすることによって、ほぼ全ての標的が十分な線量を受けることを確実にするプランが展開する。その結果、腫瘍での集積線量が高くなり、健全な組織に対する平均線量が低くなる。
【0009】
ガントリ・ベース放射線治療システムでは、放射線ビームが、放射線ビーム源の方位から見て標的のシルエットに合致するように、マルチリーフ・コリメータ(MLC)によって整形される。MLCは、ガントリに取り付けられ、線形加速器に結合される。MLCは、ビーム強度を変更し、放射線分布を制御するように放射線をブロックする及び/又は濾波することの可能な、いくつかの調節可能なリーフを含む。典型的には、リーフは、放射線に対して本質的に不透過性の高密度物質(例えばタングステン)から構成され、放射線場の形状を形作るようにビームの放射線場の中へ及び放射線場から外へ、個別に機械的に駆動される。図1は、標的のシルエットに対応する放射線場の形状を形作るように調節されたMLCのリーフを示す。放射線治療プランがMLC用に生成される2つの従来的な方法がある。
【0010】
殆どの放射線投与システムが、円内で回転自在である線形加速器で患者を包囲する円形ガントリを使用する。複数のビームが生成されて、円の周りでこの加速器を移動させ、このビームの軌道は、「ガントリ角度」と呼ばれる回転角を描く単一の角度によって特徴付けられる。MLCを有する従来のIMRT(強度変調放射線治療)システムでは、治療プランニングは、まず治療システムの各ノードでの、すなわち各所望の角度での最適な線量分布を決定することから実施される。線量分布が決定された後に、場形状が、MLCの制約条件を考慮して、リーフ・シークエンシング・アルゴリズムを利用して生成される。すなわち、命令のセットが生成されて、最適な線量分布を可能な限り忠実に実現するために所与のパターンにリーフを移動させる。予想される線量分布が生成されたリーフ・シークエンシング・アルゴリズムから計算された後で、標的関心ボリューム(「VOI」)の放射線治療が行われる。
【0011】
MLCを有する従来の3Dコンフォーマル・システムでは、治療プランニングは、まず標的のシルエットにMLCのリーフを一致させることから実施される。この場合、リーフ・シークエンシング・アルゴリズムがないため、プランニング・コンポーネントは、そのガントリ角度から標的のシルエットに各ビームの形状を一致させることだけを要求する。一度MLCの位置が決定されると、予想される線量分布を生成することができ、標的VOIの放射線治療が行われる。
【0012】
放射線治療を投与する他の様式は、CyberKnife(登録商標)システムによって実現されるものである。放射線投与機器を患者の周囲で円形に移動させる代わりに、これは、平行移動と回転移動を共に自由に行う多関節ロボット・マニピュレータに取り付けられる。したがって、放射線は、ガントリに取り付けられるライナックが移動可能である円弧内で選択される角度に限定されるのではなく、患者に対して多様な位置と配向から投与することが可能である。
【0013】
本発明が、添付の図面の図において例示として図示されるが、これらに限定されない。
【発明を実施するための最良の形態】
【0014】
以下の記述において、説明のために、多数の具体的な詳細が、本発明の十分に理解させるために述べられる。しかし、本発明はこれらの具体的な詳細を伴わずに実施することは当業者には明らかであろう。他の例において、よく知られた回路、構造、技法は、この記述の理解を不要に曖昧にすることを避けるために、詳細には示されず、又はブロック図の形態で示される。
【0015】
この記述において「一実施形態」と言う場合、これは、この実施形態に関連して説明される特定の機能、構造、又は特徴が、本発明の少なくとも1つの実施形態に含まれることを意味する。本明細書中の様々な箇所において「一実施形態において」という表現が出現するが、これら全てが同一の実施形態を必ずしも指すわけではない。
【0016】
放射線治療システムのための1つ又は複数の放射線ビーム・パラメータの選択の自動化のための装置及び方法が説明される。1つの特定の実施形態においては、この装置及び方法は、ビーム寸法を自動的に選択する。他の実施形態において、この装置及び方法は、ビーム形状が自動的に決定される。さらに他の実施形態においては、この装置及び方法は、ビーム配向を自動的に決定する。この装置及び方法は、ビーム寸法、ビーム形状、ビーム配向の組合せを自動的に決定することが理解されよう。また、この装置及び方法の実施形態は、複数のコリメータを自動的に選択する。また、この装置及び方法の実施形態は、自動的に決定されたビーム・パラメータ(又は複数のパラメータ)にもとづいて1つ又は複数のコリメータを自動的に選択する。
【0017】
逆方向プランニングにおいては、順方向プランニングとは逆に、医学物理学者が、所望の線量分布を、例えば腫瘍に対する最小線量と他の健全な組織に対する最大線量とを個別に指定し、次いで治療プランニング・モジュールが、指定された線量条件を達成するためにビームの方向と距離を選択すると共に総数と合計強度を選択する。ユーザにより所望の線量分布が指定されて入力されると(例えば最小線量及び最大線量)、逆方向プランニング・モジュールは、線量ウェイト及び/又はビーム方向を選択し最適化する、すなわちそのような分布をもたらすビームの最適なセットを選択する。
【0018】
逆方向プランニングの際に、関心ボリューム(VOI)が、与えられる放射線量に関して標的とされるべき又は回避されるべきユーザ画定構造を表すために使用される。すなわち、照射源は、治療を要する腫瘍に相当するVOIに放射線量を集中させるとともに、危険構造に相当するVOIへの放射線量を可能な限り回避させるように計算された配列で配置される。一度標的(例えば腫瘍)VOIが定められると、危険VOI及び軟組織(標的VOIや危険VOIに相当しない治療領域内の全組織)のボリュームが指定され、担当の放射線腫瘍医又は医学物理学者が、例えば標的VOIに対する最小放射線量と正常及び健全な危険組織に対する最大線量とを指定する。次いで、ソフトウェアが、治療プランの線量拘束値を満たすように、放射線治療システムの位置指定性能に依拠して逆方向治療プランを生成する。
【0019】
図2は、CT画像のスライスを表示する、治療プランニング・システムのグラフィカル出力の想像図である。CT画像の図は、治療のために標的とされる病理構造体と、病理構造体付近に位置する危険領域とを含む。治療プランニング・ソフトウェアは、危険領域の周囲の危険領域輪郭と、病理構造体の周囲の標的領域輪郭とを生成させる。従来は、ユーザが、対応する輪郭を生成するために治療プランニング・ソフトウェアが使用するディスプレイ上で、ポイント(例えば図2の輪郭線上のいくつかのドット)を手動で描画していた。これは容易な作業と思われる場合があるが、この一致作業は、病理構造体や正常構造体の3次元性と変則性のために難しい。標的領域に対する指定された最小線量及び危険領域に対する最大線量にもとづき、治療プランニング・ソフトウェアは、標的領域に対して線量等高線を生成する。線量等高線は、一定線量の線であり、標的領域に関して指定された規定線量の所与の線量パーセンテージ(例えば60%、70%、80%など)、又は絶対線量値(例えば2000センチグレイ)を表す。理想的には、臨床的に有効と見なされる線量の最少量を表す線量等高線が、標的領域の輪郭と完全に一致するべきである。いくつかの場合では、治療プランニング・ソフトウェアにより生成される線量等高線は、最適なものではなく、図2に図示されるように危険領域の部分を含む可能性がある。
【0020】
効果的な放射線治療システムに対する2つの主要な要件は、等質性及び共形性である。等質性は、標的(例えば腫瘍、病変、血管奇形などの病理構造体)のボリューム上の放射線量の均一性であり、線量ボリュームヒストグラム(DVH)により特徴付けることが可能である。DVHは、y軸においては、絶対測定値として、又はVOIボリュームのパーセンテージとしてボリュームを表す。x軸には、絶対線量又は所与線量(例えば最大線量又は規定線量)のパーセンテージとしての線量値がある。DVHグラフは、VOIのどれほどのボリュームが、x軸上の対応する線量値以上の線量によってカバーされるかを示す。病理構造体に関する理想的なDVHは、図3に図示される矩形関数となり、線量は、病理構造体のボリューム上で規定線量の100パーセントとなる。危険領域に関する望ましいDVHは、図4に図示されるプロファイルを有し、危険構造体の構造のボリュームは、規定線量の可能な限り少量を受ける。
【0021】
共形性は、放射線量が、隣接する危険構造に対する損傷を回避するために標的(例えば腫瘍)の形状と範囲に一致する(合致する)度合である。より具体的には、共形性は、標的VOI内における規定(Rx)線量の量(適用される線量の量)の基準である。共形性は、共形性指数(CI)=(≧Rx線量での総ボリューム)/(≧Rx線量での標的ボリューム)を使用して測定することができる。完全な共形性においては、CI=1となる。従来の放射線療法による治療では、治療プランニング・ソフトウェアを使用して、臨床医が、治療線量(例えば3000cGy)の適用のために対応するVOIに関する線量等高線を特定する。
【0022】
放射線治療プランニングの目的は、臨床対象に一致する線量分布(標的構造と危険構造に対する最小線量と最大線量、共形性、等質性など)を生成する各ビームの位置、形状、「ウェイト」(ビームにより投与される放射線の量)を含む放射線ビームのセットを見つけることである。CyberKnife(登録商標)システムなどのロボット・ベースの放射線治療においては、放射線ビームは、患者に対して様々な位置と配向に移動可能である。
【0023】
図5は、本発明の一実施形態による、照射源をそこに位置決めするための空間ノードのセットを含む、放射線治療実施システム100の作業空間の斜視図である。放射線治療実施システム100の図示される実施形態は、照射源105、治療床110、検出器115A、115B(集合的には115、また撮像装置とも呼ぶ)、撮像源120A、120B(集合的には120)、ロボット・アーム125を含む。
【0024】
放射線治療実施システム100は、放射線治療(例えば放射線外科手術及び/又は放射線療法)を実施して、患者内の病変(例えば腫瘍組織)を治療する又は破壊するために使用する。放射線治療の際に、患者は治療床110上に載せられ、治療床110が操縦されて、プリセット位置に、又は照射源105にアクセス可能な作動範囲(例えば視界)内で、標的を示す関心ボリューム(「VOI」)を位置決めする。一実施形態において、放射線治療実施システム100は、画像誘導放射線治療実施システムである。撮像源120と検出器115とが一体となって、治療床110及びその上の患者の位置と、患者内のVOIに対する照射源105の整列との視覚的制御を実現する画像誘導システムとなる。一実施形態において、治療床110は、ロボット・アームなどの位置決めシステム(図示せず)に結合されてよく、これは、画像誘導システムからフィードバックを受けて、照射源105に対する患者内のVOIの変位と配向の両方の正確な制御を実現する。
【0025】
一実施形態において、ロボット・アーム125は、その動作エンベロープ内において殆ど無数の可能性を伴って照射源105を位置決めすることが可能である複数の(例えば6)自由度を有する。このタイプの動作を可能にすることにより、いくつかの問題が生じることがある。第1に、多数の位置指定が可能であることにより、特定のVOIを治療するためのビーム位置やビーム軌道を決定する際に、治療プランニング・システムが解決すべき困難な問題が生じる。第2に、ロボット・アーム125の動作エンベロープ内における非制約的な動作を可能にすることによって、照射源105と、患者又は他の定置物体との間での衝突の可能性が生じ得る。これらの問題は、照射源105が放射線ビームをそこから発する有限数の空間ノードに照射源105を制限し、さらにロボット・アーム125が空間ノード間で辿らなければならない空間経路(既知の安全経路)を生成することによって解決することが可能である。
【0026】
空間ノードとこれらの空間ノードを相互に接続する関連付けされる安全経路との集合体が、「作業空間」又は「ノード・セット」と呼ばれる。図5は、作業空間130を図示し、それぞれが「+」記号によって表されている多数の空間ノード135(2つだけが符号を付けられている)を含む。複数の種々の作業空間が、種々の患者作業領域のために生成され、定められる。例えば、作業空間130は、(図示されるように)球形であり、患者の頭部内に存在するVOIを治療するために定められる。代替として、作業空間130は、他の形状(例えば楕円状)を有し、患者の他の部位内に存在するVOIを治療するために定められてもよい。さらに、複数の作業空間130が、患者の種々の部分について定められ、それぞれが、650mm及び800mmなどの種々の半径又は種々の源−軸間距離(「SAD」)を有している。SADは、照射源105における光子生成のために使用される電子標的と、VOIにより示される標的との間の距離である。SADは、作業空間の表面領域を画定する。楕円状作業空間の一実施形態においては、SADは、900mmから1000mmの範囲に及ぶことがある。他のSADを使用してもよい。
【0027】
空間ノード135は、作業空間130の表面上に存在する。空間ノード135は、照射源105が患者内のVOIに対する放射線量を停止する及び投与することが可能な位置を表す。治療プランの投与の際に、ロボット・アーム125は、予め規定された経路にしたがって、全ての空間ノード135に照射源105を移動させる。一実施形態においては、特定の治療プランが特定の空間ノード135からの放射線量の投与を要さない場合であっても、照射源105は、予め決められた安全経路に沿ってゆくことになるので、特定の空間ノード135に向かう。他の実施形態においては、ロボットは、ノード間における許容可能な移行についてのより詳細な情報を利用して、不使用のノードをスキップする。
【0028】
図5は、例示の個数の空間ノード135を含む完全ノード・セットを図示する。完全ノード・セットは、作業空間130の幾何学的表面上に実質的に一様に分布される空間ノード135を含んでいる。完全ノード・セットは、全てのプログラムされた空間ノード135を含み、殆どの疾患部及び関連付けされるVOIに対する治療プラン解決法を効率的に計算するために使用可能な個数の空間ノード135である。完全ノード・セットは、等質性しきい値及び共形性しきい値が多様な種々のVOIについて達成され、同時に患者内の危険構造を回避するのに十分に有利なポイントを提供することが可能となるように、適度に多数の空間ノード135を与える。完全ノード・セットが、図示される又は説明される個数よりも多い又は少ない空間ノード135を含んでよいことが理解されよう。例えば、処理能力が向上し、得られた経験により治療プランを生成すると、空間ノード135の平均個数は経時的に増加して、より柔軟でより高品質の治療プランを生成することができる。いくつかの実施形態においては、標的は、それらの位置にもとづいて予め規定された空間ノード・セットを有してもよい。典型的には、このセットは、同一又は同様の位置における同様に標的に対する経験を介して見出される。
【0029】
図6は、あるノードでの照射源105の再配向を図示する。上記で説明されたように、照射源105は、任意の空間ノード135に位置決めすることが可能である。さらに、各ノードにおいて照射源を再配向することが可能である。例えば、照射源105は、ノード135において角度α1で第1の配向(配向1)で位置決めする。また、照射源105は、同一のノード135において角度αNで任意の数の配向に再配向する。一実施形態において、照射源105は、各ノード135において12の異なる配向に(12の異なる角度α1〜α12で)再配向することが可能である。照射源105はより少数の配向又はより多数の配向に再配向することが可能であることが理解されよう。図6に図示されるように、ある配向(配向1)は、VOIの中心を貫通する角度で放射線ビームを投与する。他の配向が、VOIの中心を貫通することなくVOI内に放射線ビームを投与し、さらに他の配向が、VOIの外側に放射線ビームを投与する。治療プランニング・システムはVOIの外側に放射線ビームを投与する配向を自動的に排除することが理解されよう。
【0030】
図7A〜図7Cは、治療プランニング・システムにおいて使用するための治療プランを生成するための例示のアルゴリズムを図示する。一実施形態において、このアルゴリズムは、最大線量拘束値を上回る逸脱及び最小線量拘束値を下回る逸脱を最適化する反復アルゴリズムである。この反復プランニング・アルゴリズムは、まず候補ビームのセットを生成し、初期線量分布計算を実施し、その後1つ又は複数のビームのウェイトを変更することにより初期線量分布計算の改善を試みる。他の実施形態においては、このアルゴリズムは、例えばシンプレックス・アルゴリズムなどの凸最適化を実施する。凸最適化により最適化するコスト関数の一例は、最小/最大線量拘束値によって決まる(治療ビームがイネーブルになる総時間量に対して直線的に関係する)モニタ・ユニットの個数である。シンプレックス・アルゴリズムは、当技術分野においてよく知られる。代替として、他の反復最適化アルゴリズムや非反復最適化アルゴリズムが使用されてもよい。一実施形態においては、両方のアルゴリズムの組合せが使用されてもよい。いずれにせよ、ユーザによる標的の描画は、治療プランニング・アルゴリズムと共に使用するために、VOIビット・マスク(すなわち、3D画像の各位置が、所与のVOIがその画像位置に重複する場合には各VOIを表すビットを「1」に設定し、重複しない場合には「0」に設定するように、描画用に使用される3D画像ボリューム上のオーバーレイ)に変換される。
【0031】
通常、治療プランニング・アルゴリズムは、ユーザによる標的特定を要する。典型的には、治療プランニング・アルゴリズムは、組み合わせて患者の3D治療領域を表す2D画像のスタックをユーザに提示し、ユーザが2D画像上で輪郭を特定することを必要とし、この2D画像は次いで組み合わされて3D標的ボリューム(標的VOI)を画定する。一実施形態において、標的特定は、画像空間中での縁部検出と一連のポイントへのその縁部の変換との組合せを含む。次いで、この一連のポイントは、組み合わされて、3D画像の最上部に提示される3D構造を生成する。縁部検出は、Delpら「Edge Detection Using Contour Tracing」(Center for Robotics and Integrated Manufacturing、Robot System Division、College of Engineering University of Michigan RSD−TR−12−83(1983)43)においてより詳細に説明される。ポイントの輪郭描画は、Mat、Ruzinoor Che「Evaluation of Silhouette Rendering Algorithms in Terrain Visualisation」(MSC Computer Graphics and Virtual Environment Dissertation、Computer Science Department、The University of Hull(http:staf.uum.edu.my/ruzinoor/dissertation.htm))においてより詳細に説明される。標的特定のための他のよく知られた方法が、治療プランニング・アルゴリズムにおいて使用されてもよい。
【0032】
図7Aは、治療プランを生成するためのプロセス200を示す。図7Aに図示される実行例において、プロセス200は、標的VOIを描画することにより開始する(ブロック205)。図7Aに図示される実行例において、ユーザは標的を特定し、システムは標的VOIを生成する(ブロック210)。簡潔にするために、以後このプロセスを「ユーザが標的VOIを特定する」と呼び、ユーザが危険構造VOIを特定することに関しても同様とする。
【0033】
プロセス200は引き続き、ブロック215で線量拘束値を特定する。線量拘束値は、例えば最小標的VOI線量、健全な組織に対する最大許容可能線量、等質性の度合、共形性の度合、総ビーム・オン時間、モニタ・ユニット総数、ビーム数を含むが、これらに限定されない。また、図7Aの実行例において、ユーザは、線量拘束値を特定する(ブロック220)。代替としては、まずユーザが、線量拘束値を特定し、次いで標的VOIを特定するか、又はユーザは、いくつかの線量拘束値を特定し、標的VOIを特定し、次いで他の線量拘束値を特定してもよい。
【0034】
プロセス200は引き続き、ブロック225でユーザが、ビーム形状とビーム寸法を手動で選択する。ビーム形状とビーム寸法を手動で選択することにより、ユーザは、治療実施において使用されるべきコリメータ(又は複数のコリメータ)を手動で選択することになることが理解されよう。ビーム配向が、治療プランニング・アルゴリズムによって無作為に決定される。治療プランニング・アルゴリズムは、VOIビット・マスクと共に乱数発生器を使用して、VOIにおける内部の又は表面のポイントに交差するビームとなる配向を特定する。
【0035】
プロセスは引き続き、ブロック230で線量マスクが、候補ビームに関して生成する。線量マスクは、ビームによって空間内の位置のセットに投与される放射線量の量を表し、ビーム期間に標準化される。線量マスクにおける一例の要素は、例えば(128、203、245)といった患者のCT画像内のボクセル位置、及びビーム・オン時間1秒当たりの1cGyの線量値である。線量マスクを生成するための任意のよく知られたプロセスが使用されてもよい。図7Aの実行例において、候補ビームは無作為に生成される(ブロック235)。治療プランニング・アルゴリズムは、候補ビーム・セットを生成するために、利用可能なビームの数、寸法、位置、配向又はそれらの組合せと共に乱数発生器を使用する。ブロック240で、ビーム・ウェイトが候補ビームに関して最適化される。ビーム・ウェイトを最適化するための任意のよく知られたプロセスが使用される。上記で説明されたように、線量計算及び/又はビーム最適化は、反復アルゴリズム、凸アルゴリズム、又は組合せアルゴリズムである。
【0036】
プロセス200は、ブロック245で治療プランが生成されて終了する。その後、治療プランは、放射線治療システムを使用して患者に適用することができる。一実施形態において、放射線治療システムは、図5に関連して上記で説明された放射線治療システム100である。
【0037】
図7Bは、本発明の一実施形態による、治療プランを生成するための他のプロセス300を示す。図7Bに図示される実行例においては、プロセスは、標的VOIを特定することにより開始する(ブロック305)。図7Bに図示される実行例においては、上述のように、ユーザが標的VOIを特定する(ブロック310)。プロセスは引き続き、ブロック315で線量拘束値を特定する。線量拘束値は、例えば最小標的VOI線量、健全な組織に対する最大許容可能線量、等質性の度合、共形性の度合、総ビーム・オン時間、モニタ・ユニット総数、ビーム数を含むが、それらに限定されない。また、図7Bの実行例においては、ユーザは、線量拘束値を特定する(ブロック320)。代替として、まずユーザは、線量拘束値を特定し、次いで標的VOIを特定するか、又はユーザは、いくつかの線量拘束値を特定し、標的VOIを特定し、次いで他の線量拘束値を特定してもよい。
【0038】
プロセスは引き続き、ブロック325で1つ又は複数のビーム・パラメータが、自動的に決定される。一実施形態においては、ビーム・パラメータ(又は複数のビーム・パラメータ)は、例えばビーム配向、ビーム形状とビーム寸法のうちの1つ又は複数を含む。1つ又は複数のビーム・パラメータを自動的に決定するための例示のアルゴリズムが、以下に開示される。治療プランニング・アルゴリズムがビーム・パラメータ(又は複数のビーム・パラメータ)を自動的に決定するので、治療プランニング・アルゴリズムはまた、適用された線量拘束値を最もよく満たすように、1つ又は複数のコリメータ寸法を自動的に選択することも可能であることが理解されよう。一実施形態において、コリメータ(又は複数のコリメータ)は、固定絞りコリメータ(又は複数の固定絞りコリメータ)である。他の実施形態において、コリメータ(又は複数のコリメータ)は、アイリス・コリメータ(又は複数のアイリス・コリメータ)である。アイリス・コリメータでは、コリメータの絞りの形状は固定されるが、絞りの寸法は、連続的に又は寸法定量増加式に、治療セッションの最中に変えることができる。一実施形態において、IRISコリメータは、ドイツ国ハイデルベルグのDeutsches Krebsforschungszentrum(DKFZ、German Cancer Research Center in Helmholtz Association)により開発されているIRISコリメータである。
【0039】
プロセスは引き続き、ブロック330で線量マスクが候補ビームに関して生成される。線量マスクを生成するための任意のよく知られたプロセスが使用されてもよい。図7Bの実行例において、候補ビームは、ブロック325で決定されたビーム・パラメータ(又は複数のビーム・パラメータ)を使用して決定される。また、候補ビームは、線量拘束値及びVOIビット・マスクを使用して決定されてもよい。ブロック340で、ビーム・ウェイトが候補ビームに関して最適化される。ビーム・ウェイトを最適化するためのよく知られたプロセスが使用される。上述のように、線量計算及び/又はビーム最適化は、反復アルゴリズム、凸アルゴリズム、又は組合せアルゴリズムである。
【0040】
プロセス300は、ブロック345で治療プランが生成されて終了する。その後、治療プランは、放射線治療システムを使用して患者に投与することができる。一実施形態において、放射線治療システムは、図5に関連して上記で説明された放射線治療システム100である。
【0041】
図7Cは、本発明の一実施形態による、1つ又は複数のビーム・パラメータを自動的に決定するための反復プロセス400を示す。図7Cに示されるように、プロセス400は、ブロック405でノードが解析される必要があるかどうかを決定する。図7Cのプロセスにおいて参照されるノードは、図5の空間ノード135である。ノードが解析される必要がある場合(ブロック405)、標的シルエットがブロック410で特定され、線量拘束値がブロック420で決定され、形状及び/又は寸法がブロック430で標的の形状を使用して自動的に決定され、配向及び/又は寸法がブロック440でパッキング・アルゴリズムを使用して自動的に決定される。プロセスは、ブロック405に戻り、残りのノードがなくなるまで各ノードでプロセス自体を繰り返す。残りのノードがなくなると、プロセスはブロック450へと続き、線量マスクが生成される。
【0042】
標的形状を使用して形状及び/又は寸法を決定するための例示のプロセスと、パッキング・アルゴリズムを使用して配向及び/又は寸法を決定するための例示のプロセスとが、以下で開示される。また、図7Cの反復プロセスがより少数のステップ又はより多数のステップを含んでよいことが理解されよう。例えば、反復プロセスは、各ノードでのビーム配向、形状と寸法のうちの1つ又は複数を自動的に決定することをのみを含んでよい。また、反復プロセスにおけるステップの順序は変更することが理解されよう。例えば、配向及び/又は寸法は、形状及び/又は寸法が標的形状を使用して決定される前に、パッキング・アルゴリズムを使用して決定されてもよい。
【0043】
また、治療プランニング・アルゴリズムはユーザ選択(図7A)及び自動決定(図7B及び図7C)の組合せを含むことが理解されよう。例えば、ユーザはビーム寸法とビーム形状を手動で選択するが、治療プランニング・アルゴリズムがビーム配向を自動的に決定してもよい。他の例では、ユーザはビーム形状を手動で選択し、治療プランニング・アルゴリズムがビーム寸法とビーム配向を自動的に決定してもよい。さらに、システムの制約条件により、コリメータの数が固定されることがある。コリメータ寸法が、固定されてもよく(例えば単一のコリメータ寸法)、又は離散的な寸法のセットに限定されてもよい。連続変動可能に寸法設定されるビームを有する構成が、最も近い許容されるコリメータ寸法(又は複数の寸法)に揃えられてもよい。
【0044】
図7B及び図7Cを参照して上記で説明されるように、治療プランは、1つ又は複数のビーム・パラメータを自動的に決定することを含む。図8A〜図10Bは、ビーム・パラメータ(又は複数のビーム・パラメータ)を自動的に決定するための例示のアルゴリズムの一態様を図示する。
【0045】
図8A〜図8Kは、パッキング・アルゴリズムを使用してビーム・パラメータを自動的に決定するための例示のプロセスの一態様を図示する。放射線治療プランニング・システムのパッキング・アルゴリズムにおいてVOIをパックするために使用される物体は、放射線ビームの断面に対応する。さらには、放射線ビームは、1つ又は複数のコリメータにより生成される放射線断面に対応する。したがって、パッキング物体は、1つ又は複数のビーム・パラメータを定義する。ビーム・パラメータ(又は複数のビーム・パラメータ)は、1つ又は複数のコリメータを自動的に選択するために使用することが可能である。例えば、パッキング物体の寸法はコリメータの寸法を決め、パッキング物体の形状はコリメータの形状を決める。同様に、パッキング形状の中心がコリメータの配向を決め、この配向はノードからパッキング形状の中心に線を取ることによって決められる。
【0046】
(同等寸法の円についての)ペニー・パッキング・アルゴリズム又は(異なる寸法の円についての)円パッキング・アルゴリズムなどのパッキング・アルゴリズムが、非重複円で標的のシルエットなどの物体を最もよく充填する円のセットを生成する。図8Aは、標的(VOI)500を示し、これは、ペニー・パッキング・アルゴリズムにしたがって、重複が可能でない状態でVOI500内に配置された複数の円505を有する。代替のパッキング・アルゴリズムでは、物体内に重複円のセットの結合体がある。図8Bは、重複ペニー・パッキング・アルゴリズムを図示する。図8Bにおいて、円505は、各円の少なくとも一部分が他の円に重複するように標的500内に配置される。重複の度合が図8Bに図示されるものと異なってよいことが理解されよう。例示の円パッキング・アルゴリズムは、Collinsら「A circle packing algorithm」(Computational Geometry 25(2003)233〜356)、及びChenら「Algorithms for Congruent Sphere Packing and Applications」(SCG’01(2001)212〜221)に記載される。代替として、当技術分野で知られている他のパッキング・アルゴリズムが使用されてもよい。
【0047】
円(又は他のパッキング物体)は、固定寸法でも又は複数の寸法でもよい。図8Cは、パッキング・アルゴリズムにより種々の寸法のパッキング物体を使用できることを示す。図8Cは、第1の寸法を有する円510、第2の寸法を有する円515、第3の寸法を有する円520を有するVOI500を示す。図8Cにおいて、円510は、円515よりも大きく、円515は円520よりも大きい。3つより少ない又は3つより多い数の寸法がパッキング・アルゴリズムにより使用されてよく、寸法は図示される寸法と異なってよいことが理解されよう。
【0048】
パッキング・アルゴリズムにおいて使用される物体の寸法は、所与のコリメータ寸法に対する(例えば線量マスクにより表されるような)予想される線量分布の断面を検査することによって決定することができる。例えば、30mmのコリメータ直径を有するビームについて線量マスクの断面を取り、1cGy/秒を上回る値を有する断面における全要素を取ることによって、15mmの半径を有する円へ近似することができる。
【0049】
上記で説明されたように、パッキング・アルゴリズムは、重複アルゴリズムであってもよい。中心軸変換が、例示の重複パッキング・アルゴリズムである。中心軸変換は、最大内接円盤の中心の軌跡である。最大内接円盤は、物体内の任意の他のポイントに中心を有する他のいずれの内接円盤内にも完全には包含されない、最も近い境界ポイントへの距離に等しい半径を有する円盤である。全ての最大内接円盤のセットの結合体が、物体自体(すなわちVOI)となる。スケルトンと全スケルトン・ポイントでの最大円盤の半径とを足したものが、対称軸変換である。例示の中心軸変換アルゴリズムは、Geら「On the Generation of Skeletons from Discrete Euclidean Distance Maps」(IEEE Transactions on Pattern Analysis and Machine Intelligence、Vol.18、No.11(1996)1055〜1066)に記載される。代替として、当技術分野において知られる他の中心軸変換アルゴリズム又は非重複アルゴリズムが使用されてもよい。
【0050】
図8D及び図8Eは、VOIに関する中心軸変換を図示する。図8Dは、中心軸変換アルゴリズムを使用してスケルトン525が中に形成される、変則的形状を有するVOI500を示す。図8Eは、単純な標的形状に関する中心軸変換アルゴリズムを図示する。中心軸変換アルゴリズムがより複雑な標的形状に使用されてもよく、単純な標的形状は説明の容易化のために使用されているにすぎないことが理解されよう。図8Eにおいて、VOI500aは、スケルトン525aを含む。円505aは、スケルトン525aに沿い配置される。スケルトン525aが使用されて、可能な円505aのセットを決定する。次いで、アルゴリズムが、線量拘束値にもとづき、これらの円505aのいずれが線量拘束値を満たすために使用可能であるかを決定する。例えば、アルゴリズムが100個の円505aを特定する場合、アルゴリズムは、治療目的のために5つの円505aだけを、したがって対応するコリメータの寸法と配向をだけを選択してもよい。さらに、重複の最大量を特定することが可能であり、及び/又はいくつかの円505aを排除するために、非カバー領域の最大量を、ユーザが決める、又は等質性、最大線量、共形性などの線量拘束値にもとづいて計算することが可能である。
【0051】
図8Fは、標的シルエット530の第1の輪郭と、標的シルエット540の第2の輪郭とを有するVOI500を示す。標的のシルエット530の第1の輪郭は、実シルエット500とは対照的に、例えばユーザが共形性を求める場合にパッキング・アルゴリズムで使用することが可能である。標的シルエット540の第2の輪郭は、実シルエット500とは対照的に、例えばユーザが線量等質性を求める場合にパッキング・アルゴリズムで使用することが可能である。
【0052】
図8Gは、パッキング・アルゴリズムに対するビームの浸食と膨張の適用を図示する。図8Gにおいて、VOI500bは、円505bを含み、各円は、円530bの第1の輪郭及び円540bの第2の輪郭を有する。第1の輪郭530bは放射線ビームの浸食に対応し、第2の輪郭540bは放射線ビームの膨張に対応する。浸食と膨張により、それぞれ重複パッキング・アルゴリズムが非重複アルゴリズムとなり、非重複アルゴリズムが重複アルゴリズムとなることがある。
【0053】
図8H〜図8Kは、種々の形状と形状の組合せを有するパッキング物体を用いるパッキング・アルゴリズムを図示する。一実施形態において、パッキング物体の形状は、幾何プリミティブである(すなわちコリメータの形状は幾何プリミティブである)。例示の幾何プリミティブは、例えば円、楕円、六角形、正多角形、不等辺多角形(例えば不等辺四辺形)を含む。
【0054】
図8Hは、楕円形状放射線ビーム(すなわち楕円形状コリメータ)に対応する楕円500をパックされたVOI500を示す。図8Iは、円555と楕円560をパックされたVOI500を示す。図8Jは、六角形565をパックされた標的500を示す。図8Kは、六角形570、楕円575、円580をパックされた標的500を示す。治療プランニング・アルゴリズムにおいて使用される形状タイプ、形状の組合せなどは、図8H〜図8Kに図示されるものと異なってよいことが理解されよう。
【0055】
図8A〜図8Hに示されるように、種々の寸法及び/又は形状の、及び/又は種々の配向でのコリメータの使用が、変則的形状の標的に関して特に有利である。例えば、大型コリメータは、標的の中心部に迅速に線量を投与することが可能であり、一方より小型のコリメータは外縁の変則的形状に合致するように線量を投与することが可能である。さらに、種々の寸法及び/又は形状の、及び/又は種々の配向でのコリメータの使用により、より効果的な治療プランニングを得ることが可能となる。
【0056】
図9A及び図9Bは、1つ又は複数のビーム・パラメータが標的(VOI)600の形状を使用して自動的に決定される例示のアルゴリズムを図示する。例示のアルゴリズムは、Alpertら「The Principal Axes Transformation−A Method for Image Registration」(J Nucl Med 1990;31:1717〜1722)に開示される。上述のように、ビーム・パラメータは、1つ又は複数のコリメータを選択することになる。コリメータは、特徴的な幾何学的寸法及び/又は特徴的な形状測定値に応じて選択される。最小主軸と最大主軸の比、偏心率の様々な測定値、(同一ボリュームの球の表面/ボリューム比への標準化を伴う又は伴わない)表面/ボリューム比を含む、様々な形状測定値を使用することが可能である。
【0057】
図9Aは、質量中心605を有するVOI600を示す。コリメータが、質量中心605で標的600の中心に示される。質量中心605から始まる座標系615が示される。一実施形態においては、コリメータは、特徴的な幾何学的寸法の具体的なパーセンテージとして選択される。例えば、ユーザ描画標的の主要軸(主軸)が決定され、コリメータが最小主軸の具体的なパーセンテージとして選択される。図示される実施形態において、主軸は座標系615によって表され、最小主軸は軸620によって表される。一実施形態において、コリメータ寸法は、最小主軸の100%〜200%であってもよい。また、コリメータ寸法は、最小主軸の100%未満であってよいことが理解されよう。
【0058】
図9Bは、標的600の中心を貫通する軸625を示す。複数の軸630が、軸625に対して垂直に示される。一実施形態において、軸630は、標的625の二乗平均平方根解析において使用される。二乗平均平方根解析は、ビーム寸法の特定において有効である。
【0059】
治療プランニング・アルゴリズムは、使用可能なコリメータに対応する1つ又は複数の特徴的な寸法(例えば1つ又は複数の直径の円)の幾何プリミティブ(すなわちパッキング物体形状)が、線量拘束値の条件の下でVOIを最適に充填する又はパックするように、1つ又は複数のコリメータ寸法を見出すように各ノード位置からVOIを解析する。図10A及び図10Bは、2つの異なるノード位置から標的(VOI)を示す。図10Aは、第1の位置からVOI700aを示し、図10Bは、第2の位置からVOI700bを示す。同一のVOIは、位置によって異なる形状を有する。VOI700a及び700bは共に、円705をパックされて示されるが、VOI700bは、VOI700aに比べてより効果的にパックされる。上述のように、パッキング物体の形状とその寸法は、コリメータの形状と寸法に対応し、VOI内におけるその位置は、各ノード位置で候補ビームを生成するために使用されるビーム配向に対応する。
【0060】
図11A〜図11Eは、治療プランニング・システムのためのユーザ・インターフェース800の例示のスクリーン・ショットである。ユーザ・インターフェース及びスクリーン・ショットは、図示され説明されるものと異なってよいことが理解されよう。図11Aに示されるように、治療領域の画像が治療プランニング・システム内にロードされる。図11Bは、標的の断面を含む種々の2D画像スライスを示す。図11Cに示されるように、ユーザは、上述のように、ユーザ・インターフェース800に様々な線量拘束値を入力する。図11Dは、本明細書にて説明されるアルゴリズムを使用して生成される標的に対する治療プランを示す。図11Eは、標的に対する治療プランを示し、コリメータ寸法が自動的に選択される。代替として、ユーザは、提案コリメータ寸法(又は複数の寸法)の提示を受けることができ、提案コリメータ寸法(又は複数の寸法)を受け入れる及び/又は修正することが可能である。
【0061】
本発明の実施形態は、治療プランを展開するために、順方向プランニング技法及び逆方向プランニング技法(例えばアイソセントリック・ビーム形状及び非アイソセントリック・ビーム形状、又はコンフォーマル・ビーム形状)の両方又はいずれかと共に使用されることに留意すべきである。図12は、コンフォーマル・プランニングにもとづく標的領域での非アイソセントリック放射線ビーム投与の2次元斜視図を示す。4つのビーム、すなわちビーム_1 901、ビーム_2 902、ビーム_3 903、ビーム_4 904が、説明の容易化のためだけに図12に図示され、実際の治療プランは、4つのビームよりも多い又は少ないビームを含んでよいことに留意すべきである。さらに、4つのビームは、コンフォーマル・プランニングを表し、各ビームは、標的領域900(例えば病理構造体)内の様々なポイントを貫通する。コンフォーマル・プランニングにおいて、いくつかのビームは、共通ポイントで交差又は集束してよく、あるいはしなくてよく、4つのビームは図12の斜視図においては交差して見えるが、ビームはその実際の3次元空間内においては交差しない。放射線ビームは、標的ボリュームとの交差のみを要し、標的900内における単一ポイント又はアイソセンタに必ずしも集束しない。一実施形態においては、コンフォーマル・プランニングはCyberKnife(登録商標)システムなどの(例えば放射線外科手術を実施するための)画像誘導ロボット・ベース放射線治療システムを利用するが、その理由は、LINAC位置指定機構(例えば図14のロボット・アーム3012)が、複数の自由度で自在に動き回るとともに、LINACの放射線ビームを空間中の任意の位置に向けることを可能にすることができるからである。
【0062】
図13は、放射線治療を実施するために使用され、本発明の機能を実行できるシステムの一実施形態を図示する。以下に説明されるように、及び図13に図示されるように、システム4000は、画像診断システム1000、治療プランニング・システム2000、治療実施システム100を含んでいる。画像診断システム1000は、その後の医療診断、治療プランニング及び/又は治療実施のために使用する、患者内の治療領域の医療診断画像を生成することが可能な任意のシステムでよい。例えば、画像診断システム1000は、コンピュータ断層撮影(CT)システム、磁気共鳴画像(MRI)システム、陽電子放射断層撮影(PET)システム又は超音波システムなどである。説明の容易化のために、画像診断システム1000は、コンピュータ断層撮影X線撮像法に関連して折に触れて以下で説明される。しかし、上記のような他の撮像法が使用されてもよい。
【0063】
画像診断システム1000は、撮像ビーム(例えばX線、超音波、高周波など)を生成するための撮像源1010と、撮像源1010により生成されるビーム、又は(例えばMRI又はPETスキャンにおいて)撮像源からのビームにより誘発される2次ビーム若しくは放射を検出し受けるための撮像検出器1020とを含む。一実施形態において、画像診断システム1000は、2つ又はそれ以上の診断X線源と、2つ又はそれ以上の対応する撮像検出器とを含んでよい。例えば、2つのX線源は、撮像されるべき患者の周囲に配置され、互いからある角距離で固定され(例えば90度、45度など)、X線源の正反対に位置してよい撮像検出器(又は複数の撮像検出器)の方向に患者を貫通して照準を定める。X線撮像源により照射される単一の大型撮像検出器又は複数の撮像検出器が使用されてもよい。代替として、他の個数及び構成の撮像源及び撮像検出器が使用されてもよい。
【0064】
撮像源1010と撮像検出器1020は、撮像動作を制御し画像データを処理するために、デジタル処理システム1030に結合される。画像診断システム1000は、デジタル処理システム1030、撮像源1010、撮像検出器1020の間でデータとコマンドを転送するための、バス又は他の手段1035を含む。デジタル処理システム1030は、1つ又は複数の汎用プロセッサ(例えばマイクロプロセッサ)、デジタル信号プロセッサ(DSP)などの専用プロセッサ、又は制御装置若しくはフィールド・プログラマブル・ゲート・アレイ(FPGA)などの他のタイプの機器を含んでよい。また、デジタル処理システム1030は、メモリ、記憶機器、ネットワーク・アダプタなどの他の構成要素(図示せず)を含んでよい。デジタル処理システム1030は、例えばDICOM(医用におけるデジタル画像と通信)フォーマットなどの規格フォーマットにおいてデジタル診断画像を生成するように構成されてもよい。他の実施形態において、デジタル処理システム1030は、他の規格デジタル画像フォーマット又は非規格デジタル画像フォーマットを生成してもよい。デジタル処理システム1030は、データ・リンク1500を介して治療プランニング・システム2000に診断画像ファイル(例えば上述のDICOMフォーマットのファイル)を送信でき、データ・リンク1500は、例えば直接リンク、ローカル・エリア・ネットワーク(LAN)リンク又は、インターネットなどのワイド・エリア・ネットワーク(WAN)リンクであってもよい。さらに、システム間で転送される情報は、遠隔診断又は治療プランニング構成などにおけるように、システムを接続する通信媒体間で引き出す又は送り込むことができる。遠隔診断又は治療プランニングにおいて、ユーザは、システム・ユーザと患者との間に物理的離間があるにもかかわらず、診断する又は治療プランニングするために本発明の実施形態を使用することができる。
【0065】
治療プランニング・システム2000は、画像データを受信し処理するために処理機器2010を含む。処理機器2010は、1つ又は複数の汎用プロセッサ(例えばマイクロプロセッサ)、デジタル信号プロセッサ(DSP)などの専用プロセッサ又は、制御装置若しくはフィールド・プログラマブル・ゲート・アレイ(FPGA)などの他のタイプの機器を表している。処理機器2010は、例えば記憶装置2030及び/又はシステム・メモリ2020から処理機器2010内にロードする、本明細書にて説明される治療プランニング・システム2000の操作を実施するための命令を実行するように構成することができる。
【0066】
また、治療プランニング・システム2000は、情報及び処理機器2010によって実行されるべき命令を記憶するための、バス2055により処理機器2010に結合されるランダム・アクセス・メモリ(RAM)又は他の動的記憶機器を含むシステム・メモリ2020を含んでいる。また、システム・メモリ2020は、処理機器2010が命令を実行する際の一時変数又は他の中間情報を記憶するために使用される。また、システム・メモリ2020は、静的情報及び処理機器2010に対する命令を記憶するための、バス2055に結合されるリード・オンリー・メモリ(ROM)及び/又は他の静的記憶機器を含んでもよい。
【0067】
また、治療プランニング・システム2000は、情報と命令を記憶するために、バス2055に結合される1つ又は複数の記憶機器(例えば磁気ディスク・ドライブ又は光ディスク・ドライブ)に相当する記憶機器2030を含んでいる。記憶機器2030は、本明細書にて説明される治療プランニング方法を実施するための命令を記憶するために使用することができる。
【0068】
また、処理機器2010は、ユーザに情報(例えばVOIの2次元又は3次元図)を表示するために、陰極線管(CRT)又は液晶ディスプレイ(LCD)などのディスプレイ・機器2040に結合されている。キーボードなどの入力機器2050が、処理機器2010に情報及び/又はコマンド選択を通信するために、処理機器2010に結合されている。また、1つ又は複数の他のユーザ入力機器(例えばマウス、トラックボール又はカーソル方向キー)が、方向情報を通信するために、処理機器2010に対してコマンドを選択するために及びディスプレイ2040上でカーソルの移動を制御するために使用されている。
【0069】
治療プランニング・システム2000は、治療プランニング・システムの単なる一例を表すにすぎず、これは多くの種々の構成やアーキテクチャを有してよく、これは治療プランニング・システム2000に比べより多くの構成要素又はより少ない構成要素を含み、それを本発明と共に使用してよいことが理解されよう。例えば、いくつかのシステムは、例えば周辺バス、専用バスなどの複数のバスを有する。また、治療プランニング・システム2000は、DICOMインポート(それによって画像を融合し、標的を種々のシステム上で描画し、次いでプランニング及び線量計算のために治療プランニング・システム中にインポートすることが可能となる)、ユーザが治療プランニングを行い多様な撮像法(例えばMRI、CT、PETなど)の任意の1つにもとづき線量分布を目視確認することを可能にする拡張された画像融合能力をサポートするためにMIRIT(医用画像レビュー・インポート・ツール)を含んでもよい。治療プランニング・システムは当技術分野において知られており、したがって、より詳細な説明は提示しない。
【0070】
治療プランニング・システム2000は、治療実施システム100などの治療実施システムとそのデータベース(例えば記憶機器2030に記憶されたデータ)を共有し、それにより治療実施の前に治療プランニング・システムからのエクスポートをする必要をなくすことができる。治療プランニング・システム2000は、データ・リンク2500を介して治療実施システム100に結合され、データ・リンク2500は、データ・リンク1500に関して上述したものである直接リンク、LANリンク又はWANリンクである。データ・リンク1500、2500がLAN接続又はWAN接続として実装される場合、任意の画像診断システム1000、治療プランニング・システム2000及び/又は治療実施システム100は、それらのシステムが互いから物理的に離れることが可能となるように分散した位置に置くことができることに留意すべきである。代替として、任意の画像診断システム2000、治療プランニング・システム2000及び/又は治療実施システム100を、1つ又は複数のシステムに互いに統合してもよい。
【0071】
治療実施システム100は、治療プランにしたがって標的ボリュームに予め決められた放射線量を与えるための治療的及び/又は外科的照射源105を含む。また、治療実施システム100は、照射源に対して患者を位置決めするために、上述の診断画像とのレジストレーション又は対比用の患者のボリューム(標的ボリュームを含む)の治療中画像をキャプチャするための撮像システム3020を含んいる。また、治療実施システム100は、照射源105や撮像システム3020を含み、さらに治療床110などの患者支持機器を制御するためのデジタル処理システム3030を含んいる。デジタル処理システム3030は、1つ又は複数の汎用プロセッサ(例えばマイクロプロセッサ)、デジタル信号プロセッサ(DSP)などの専用プロセッサ又は、制御装置若しくはフィールド・プログラマブル・ゲート・アレイ(FPGA)などの他のタイプの機器を含んでもよい。また、デジタル処理システム3030は、メモリ、記憶機器、ネットワーク・アダプタなど他の構成要素(図示せず)を含んでよい。デジタル処理システム3030は、バス3045又は他のタイプの制御及び通信インタフェースによって、照射源105、撮像システム3020、治療床110に結合される。
【0072】
一実施形態においては、図14に図示されるように、治療実施システム100は、カリフォルニア州のAccuray社によって開発されたCyberKnife(登録商標)システムなどの(例えば放射線外科手術を実施するための)画像誘導ロボット・ベース放射線治療システムである。図14において、照射源105は、直線加速器(LINAC)で表され、この直線加速器(LINAC)は、患者の周囲の作業ボリューム(例えば球)において多数の角度から投与されるビームで病理構造体(標的領域又はボリューム)を照射するようにLINACを位置決めするために、複数の(例えば5又はそれ以上)自由度を有するロボット・アーム3012の端部に取り付けられる。治療は、単一のアイソセンタ(集束ポイント)を有するビーム経路、複数のアイソセンタを有するビーム経路又は非アイソセンタ・アプローチによるビーム経路を含む(すなわちビームは、病理標的ボリュームと交差する必要があるにすぎず、図12に図示される標的領域内の単一のポイント、又はアイソセンタに必ずしも集束するわけではない)。治療は、治療プランニングの際に決定されるとおりに、単一セッション(単一フラクション)又は少数セッションのいずれかで実施することが可能である。治療実施システム100により、一実施形態において、術前治療プランニング段階中に標的ボリュームの位置に対する標的ボリュームの術中位置のレジストレーションを行うために堅い外部フレームに患者を固定することなく、放射線ビームを治療プランにしたがって投与することが可能となる。
【0073】
図14において、撮像システム3020は、X線源120A、120B、並びにX線画像検出器(撮像装置)115A、115Bで表されている。一実施形態において、例えば、名目上、2つのX線源120A、120Bは、2つの異なる角位置(例えば、90°、45°などで分離された)から患者を貫通して撮像X線ビームを投射するように整列させられ、治療床110の上の患者を貫通して検出器115A、115Bそれぞれに向けて照準を定められる。他の実施形態では、各X線撮像源によって照射される単一の大型撮像装置を使用することが可能である。代替として、他の数や構成の撮像線源及び撮像装置を使用してもよい。
【0074】
デジタル処理システム3030は、治療実施システム100内で治療床110上の患者を整列させるために術前治療プランニング画像に対する撮像システム3020より取得された画像のレジストレーションを行い(すなわち、術前治療プランニング画像と撮像システム3020より取得された画像との共通座標系を決定し)、標的ボリュームに対して照射源を正確に位置決めするためのアルゴリズムを実行する。
【0075】
治療床110は、複数の(例えば5又はそれ以上)自由度を有する他のロボット・アーム(図示せず)に結合されている。治療床アームは、5の回転自由度と、1の実質的に垂直方向の直線自由度とを有している。代替として、治療床アームは、6の回転自由度と、1の実質的に垂直方向の直線自由度又は少なくとも4の回転自由度とを有してもよい。治療床アームは、柱又は壁に垂直に取り付けられて、あるいは台、床、又は天井に水平に取り付けられてもよい。代替として、治療床110は、カリフォルニア州のAccuray社によって開発されたAxum(登録商標)治療床などの別の機械的機構の構成要素、又は当業者に知られる他のタイプの従来式の治療台である。
【0076】
本明細書において説明された方法及び装置は、医用画像診断及び治療での使用のみに限定されないことに留意すべきである。代替的な実施形態において、本明細書における方法及び装置は、産業用撮像、材料(例えば自動車産業における内燃機関ブロック、航空機産業における機体、建設業における溶接部及び石油産業におけるドリル・コア)の非破壊試験及び地震調査などの、医療技術分野以外の用途において使用する。そのような用途においては、例えば「治療」は、ビーム(例えば放射線、音響など)の適用などの、治療プランニング・システムによって制御される作業の実施を概して指す。
【0077】
上述の明細書において、本発明は、その特定の例示的な実施形態に関して説明された。しかし、添付の特許請求の範囲において述べられる本発明のより広い精神及び範囲を逸脱することなく、多様な修正及び変更をそれらになすることは明らかである。したがって、明細書及び図面は、限定的な意味ではなく例示的な意味において考慮されるべきである。
【図面の簡単な説明】
【0078】
【図1】病理構造体に合致するように調節されるマルチリーフ・コリメータの平面図である。
【図2】CT画像のスライスを表示する治療プランニング・ソフトウェアのグラフィカル出力の概略図である。
【図3】病理構造体に関する理想DVHを示すグラフである。
【図4】危険領域に関する望ましいDVHを示すグラフである。
【図5】本発明の一実施形態による空間ノードを有する放射線治療システムの斜視図である。
【図6】本発明の一実施形態による種々の配向のコリメータの斜視図である。
【図7A】治療プランニング・アルゴリズムの一実行例の流れ図である。
【図7B】本発明の一実施形態による治療プランニング・アルゴリズムの一実行例の流れ図である。
【図7C】本発明の一実施形態による空間ノードでの先最適化を示す流れ図である。
【図8A−K】本発明の実施形態による先最適化アルゴリズムを示す概略図である。
【図9】本発明の実施形態による先最適化アルゴリズムを示す概略図である。
【図10】本発明の実施形態による先最適化アルゴリズムを示す概略図である。
【図11A−E】本発明の一実施形態による治療プランニング・アルゴリズムに対応するユーザ・インターフェースのスクリーン・ショットである。
【図12】本発明の一実施形態による病理構造体での非アイソセントリック放射線ビーム投与の斜視図である。
【図13】本発明の一実施形態による画像診断及び/又は治療実施のためのシステムのブロック図である。
【図14】本発明の一実施形態による画像診断及び/又は治療実施のためのシステムの斜視図である。
【特許請求の範囲】
【請求項1】
複数の治療ノードで放射線を投与するための複数のコリメータを自動的に選択するステップと、
前記複数のコリメータにより前記複数の治療ノードのそれぞれで投与されるべき放射線量に対応するビーム期間を自動的に計算するステップと
を含む方法。
【請求項2】
複数のコリメータを自動的に選択するステップは、コリメータ寸法を自動的に決定するステップを含む、請求項1に記載の方法。
【請求項3】
複数のコリメータを自動的に選択するステップは、コリメータ形状を自動的に決定するステップを含む、請求項1に記載の方法。
【請求項4】
前記複数のコリメータのそれぞれの配向を自動的に決定するステップをさらに含む、請求項1に記載の方法。
【請求項5】
前記複数のコリメータの1つ又は複数が固定絞りコリメータである、請求項1に記載の方法。
【請求項6】
前記複数のコリメータの1つ又は複数がアイリス・コリメータである、請求項1に記載の方法。
【請求項7】
複数の治療ノードで放射線を投与するための複数のコリメータを自動的に選択するための手段と、
前記複数のコリメータにより前記複数の治療ノードのそれぞれで投与されるべき放射線量に対応するビーム期間を自動的に計算するための手段と
を備えるシステム。
【請求項8】
前記複数のコリメータの1つ又は複数が固定絞りコリメータである、請求項7に記載のシステム。
【請求項9】
前記複数のコリメータの1つ又は複数がアイリス・コリメータである、請求項7に記載のシステム。
【請求項10】
治療部位に放射線ビームを投与するための複数のコリメータを有する放射線ビーム治療システムと、
前記放射線ビーム治療システムに作動的に結合され、複数の治療ノードで放射線を投与するための前記複数のコリメータから複数のコリメータを自動的に選択し、前記複数のコリメータにより前記複数の治療ノードのそれぞれで投与されるべき放射線量に対応するビーム期間を自動的に計算する放射線治療プランニング・システムと
を備える装置。
【請求項11】
前記複数のコリメータの1つ又は複数は固定絞りコリメータである、請求項10に記載の装置。
【請求項12】
前記複数のコリメータの1つ又は複数はアイリス・コリメータである、請求項10に記載の装置。
【請求項1】
複数の治療ノードで放射線を投与するための複数のコリメータを自動的に選択するステップと、
前記複数のコリメータにより前記複数の治療ノードのそれぞれで投与されるべき放射線量に対応するビーム期間を自動的に計算するステップと
を含む方法。
【請求項2】
複数のコリメータを自動的に選択するステップは、コリメータ寸法を自動的に決定するステップを含む、請求項1に記載の方法。
【請求項3】
複数のコリメータを自動的に選択するステップは、コリメータ形状を自動的に決定するステップを含む、請求項1に記載の方法。
【請求項4】
前記複数のコリメータのそれぞれの配向を自動的に決定するステップをさらに含む、請求項1に記載の方法。
【請求項5】
前記複数のコリメータの1つ又は複数が固定絞りコリメータである、請求項1に記載の方法。
【請求項6】
前記複数のコリメータの1つ又は複数がアイリス・コリメータである、請求項1に記載の方法。
【請求項7】
複数の治療ノードで放射線を投与するための複数のコリメータを自動的に選択するための手段と、
前記複数のコリメータにより前記複数の治療ノードのそれぞれで投与されるべき放射線量に対応するビーム期間を自動的に計算するための手段と
を備えるシステム。
【請求項8】
前記複数のコリメータの1つ又は複数が固定絞りコリメータである、請求項7に記載のシステム。
【請求項9】
前記複数のコリメータの1つ又は複数がアイリス・コリメータである、請求項7に記載のシステム。
【請求項10】
治療部位に放射線ビームを投与するための複数のコリメータを有する放射線ビーム治療システムと、
前記放射線ビーム治療システムに作動的に結合され、複数の治療ノードで放射線を投与するための前記複数のコリメータから複数のコリメータを自動的に選択し、前記複数のコリメータにより前記複数の治療ノードのそれぞれで投与されるべき放射線量に対応するビーム期間を自動的に計算する放射線治療プランニング・システムと
を備える装置。
【請求項11】
前記複数のコリメータの1つ又は複数は固定絞りコリメータである、請求項10に記載の装置。
【請求項12】
前記複数のコリメータの1つ又は複数はアイリス・コリメータである、請求項10に記載の装置。
【図1】

【図2】

【図3】

【図4】
【図5】

【図6】

【図7A】
【図7B】

【図7C】
【図8A】

【図8B】
【図8C】

【図8D】
【図8E】

【図8F】
【図8G】

【図8H】
【図8I】
【図8J】
【図8K】
【図9】

【図10A】
【図10B】
【図11A】
【図11B】
【図11C】

【図11D】
【図11E】

【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7A】
【図7B】
【図7C】
【図8A】
【図8B】
【図8C】
【図8D】
【図8E】
【図8F】
【図8G】
【図8H】
【図8I】
【図8J】
【図8K】
【図9】
【図10A】
【図10B】
【図11A】
【図11B】
【図11C】
【図11D】
【図11E】
【図12】
【図13】
【図14】
【公表番号】特表2009−533084(P2009−533084A)
【公表日】平成21年9月17日(2009.9.17)
【国際特許分類】
【出願番号】特願2009−504332(P2009−504332)
【出願日】平成19年4月6日(2007.4.6)
【国際出願番号】PCT/US2007/008656
【国際公開番号】WO2007/117646
【国際公開日】平成19年10月18日(2007.10.18)
【出願人】(505005625)アキュレイ・インコーポレーテッド (11)
【Fターム(参考)】
【公表日】平成21年9月17日(2009.9.17)
【国際特許分類】
【出願日】平成19年4月6日(2007.4.6)
【国際出願番号】PCT/US2007/008656
【国際公開番号】WO2007/117646
【国際公開日】平成19年10月18日(2007.10.18)
【出願人】(505005625)アキュレイ・インコーポレーテッド (11)
【Fターム(参考)】
[ Back to top ]