
複数のマスクに基づく医療画像処理のためのイメージ登録方法および装置
医療画像処理での使用のためのイメージ登録方法(800)であり、身体部分のディジタル描写を各々が含むイメージのシーケンスを与えるステップ(804)と、そのシーケンスの中で参照イメージを選択するステップ(806)と、そのシーケンスの残りのイメージは動画を決定し、参照イメージに関連して、動画の少なくとも一部を再編するステップ(808-854)とを備え、前記再編するステップは、a) 動画の少なくとも1つの部分が再編成されなければならない参照イメージの領域を特定する区切りマスク、および、再整列が計算される参照イメージのさらなる領域を特定する特徴マスクを定義するステップ(808,810)と、b) 所定の間における類似性測定を最適化することにより、参照イメージに関する動画の置換を補償するための最適化された変更を決定するステップ(820-851)と、c) 最適化された変換に基づき、動画の少なくとも一部を変換するステップ(854)とを備える。

【発明の詳細な説明】
【技術分野】
【0001】
この発明は医療画像処理分野に関する。 より特別には、この発明は医療画像処理で使用のためのイメージ登録の技術に関する。
【背景技術】
【0002】
医療画像処理は医療のアプリケーションのための機器の分野で安定した技術である。特に、この技術は血液潅流の査定のために広く開発されており、それは、いくつかの診断アプリケーションと特に超音波分析で使用が見られる。このために、超音波造影剤(UCA)は、液体キャリア中の気泡の懸濁の形態で典型的に患者に施される。その造影剤は効率的な超音波反射鏡として作用し、その結果、超音波を適用することにより、エコー信号を容易に検出して記録することができる。造影剤が患者の血液と同じ速度で流れるので、それの追跡は、分析されるべき身体部分の血液の潅流に関する情報を提供する。
【0003】
気泡は、乳化剤、油、シックナー、砂糖を使用するか、または、ガスまたはそれの前兆を、さまざまなシステムへ載せるか、カプセル化することにより、典型的に安定化される。一般に、安定した気泡は「ガス充填のマイクロ小液胞」と呼ばれる。ガス充填のマイクロ小液胞は、水の媒体内で分散された気泡を含み、そして、表面活性剤(すなわち、amphiphilicの材料)を含む極めて薄い表面により、ガス/液体の界面でバウンドする。これらのマイクロ小液胞(「微小気泡」としても知られている)は、粉末化されたamphiphilicの材料、例えば、凍結乾燥された前形成のリポソーム、凍結乾燥されるか、スプレー乾燥されたリン脂質溶液を、空気または他のガスに接触させ、次に水のキャリアに接触させ、そして、微小気泡懸濁液を発生させるために、攪拌することにより、準備される。
【0004】
代わりに、マイクロ小液胞は、気泡が自然のまたは合成の重合体で形成された固形材料の覆い(この場合、それらは「マイクロ球」か「マイクロカプセル」としても知られている)によって囲まれる懸濁液を含む。別の種類の超音波造影剤は、重合体か他の固体の多孔性のマイクロ粒子の懸濁液を含み、その懸濁液は、マイクロ粒子の小孔内に捕捉された気泡を運ぶ。
【0005】
マイクロ小液胞、特にマイクロ小気泡とマイクロ球の適した水の懸濁液の例、およびそれの準備は、例えば、EP-A-0458745, WO-A-91/15244, EP-A-0554213, WO-A-94/09829 および WO-A-95/16467に説明されている。
【0006】
潅流評価処理では、通常、マイクロ小液胞は、十分なエネルギーの超音波パルス(「高い機械的なインデックス」と呼ばれる)により破壊される。分析中の身体部分のマイクロ小気泡の補給率の観測は、それの生理的な状態に関する情報を提供する。この技術は初めて、Wei, K., Jayaweera, A. R., Firoozan, S., Linka, A., Skyba, D. M., および Kaul, S., による「"Quantification of Myocardial Blood Flow With Ultrasound-Induced Destruction of Microbubbles Administered as a Constant Venous Infusion," 循環」(1998年、97巻)で提案された。
【0007】
このために、造影剤の流れは、マイクロ小液胞の破壊後、身体部分を表す連続的なイメージのシーケンスを取得することによってモニターされる。そして、そのイメージのそれぞれの基本的な領域の強度における変化を表すタイム・カーブを得るために、そのイメージは分析される。これらの潅流カーブは、潅流の過程の量的なパラメータを抜粋するために、数学的モデルに適する。上記のプロセス(パラメトリック潅流分析としても知られている)に関する例は例えば、 WO-A-02/102251および以下の刊行物で述べられている。
K. Weiによる「 Detection and Quantification of Coronary Stenosis Severity With Myocardial Contrast Echocardiography, Progress in Cardiovascular Diseases」(44(2), 2001, 81-100)、
Kevin Wei, Elizabeth Le, Jian-Ping Bin, Matthew Coggins, Jerrel Thorpe, Sanjiv Kaul、J. Am Col1 Cardiolによる「Quantification of Renal Blood Flow With Contrast-Enhanced Ultrasound 」(2001;37:1135-40)、
Kharchakdjian, R., Burns, P. N., および Henkelman, M.による「 Fractal Modeling of Microbubble Destruction-Reperfusion in Unresolved Vessels」(IEEE Ultrasonics Symposium, 2001)、
Rim, S.-J., Leong-Poi, H., Lindner, J.R, Couture, D., Ellegala, D., Masson, H. Durieux, M, Kasse, N.F. および Kaul S.による「 Quantification of Cerebral Perfusion with Real-Time Contrast-Enhanced Ultrasound, Circulation」(104巻, 2001, 2582-2587)
Schlosser その他による「 Feasibility of the Flash-Replenishment Concept in Renal Tissue: Which Parameters Affect the Assessment of the Contrast Replenishment?, Ultrasound in Med. & Biol」( 27巻, 937-944頁, 2001)、および
Murthy TH, Li P, Locvicchio E, Baisch C, Dairywala I, Armstrong WF, Vannan M による「 Real-Time Myocardial Blood Flow Imaging in Normal Human Beings with the use of Myocardial Contrast Echocardiography」( J Am Soc Echocardiogr, 2001, 14(7):698-705)。
【0008】
しかしながら、潅流評価の精度は、イメージの不可避の調整不良から生じる雑音によって大きく影響する。例えば、これは、患者の動き、その人の呼吸サイクル、または、測定プローブの不用意な移動による。これは、潅流評価の結果の精度を大きく低下させる。問題は潅流の過程のパラメトリックなイメージ処理で特に問題となる。実際にその技術は、それらの位置合わせの失敗により起きるあらゆるエラーは、対応する定量的なパラメータの計算を大きく損なうので、イメージの正確な位置合わせを要求する。上記のすべてが上で説明した技術の臨床応用を妨げる。
【0009】
この問題を解決するために、分析される前にイメージを再度の位置合わせをしなければならない。このために、シーケンスのイメージが参照として選定され、そして、他のイメージ(動画と呼ばれる)は参照イメージに関して再位置合わせされる。このように、分析されるべきである身体部分の表示は、実質的に静止していたままで残る。
【0010】
通常、再位置合わせはオペレータによって手動で実行される。 しかしながら、この解決策は非常に手間がかかり、そのうえ、得られる精度はオペレータの技能に大きく依存する。したがって、手動の再位置合わせは、ほとんどの適用で可能ではない。
【0011】
また、自動的にイメージを再位置合わせするための何らかの解決策は、最近の数年で提案されてきた。これらの解決策は、各動画を参照イメージに写像する最適の幾何学的な変換を決定するのを目的とするイメージ登録の技術に基づく。
【0012】
例えば、US-A-6490560は、コンピュータ断層エックス線撮影(CT)スキャナを使用して、組織潅流を計算するための登録方法を開示する。そのドキュメントは、三次元の量を再編成するために、二次元イメージ上で動作する方法を開示する。この場合、各量は分析で身体部分を区分する(二次元)イメージ部分のシーケンスによって表される。提案された方法では、中央の部分は各シーケンスで選択される。二次元における動きは、参照の中央の部分に関して、それぞれの中央の部分が決定される。そして、対応する移動に従って、それぞれの量が修正される。代わりに、各部分のために個別に同じプロセスを繰り返すことができる。その移動は、一定の形と強度(頭蓋骨の一部などの)を持っている選択された目印により決定される。選択的に、その分析は、処理時間を短縮するために関心のあるサブ領域に制限される場合がある。
【0013】
そのうえ、US-A-5568811は、超音波分析において組織の境界をローカライズする方法に関する。この内容では、そのドキュメントは、2つの異なったイメージの間で小さいデータ立方体を相関することにより、移動を補償する可能性を示唆している。
【発明の開示】
【発明が解決しようとする課題】
【0014】
しかしながら、この分野で公知のいずれの解決策も完全に満足できるものではない。事実、利用可能な登録方法は、最も実用的な状況において、比較的貧しい結果しか提供しない。特に、提案された解決策は、潅流処理のパラメトリックなイメージ処理に対して適切なレベルの精度を確定しない。その上、超音波映像での小斑点粒の存在は、実際に潅流評価に関する情報を隠す。これは処理の精度をさらに低下させるエラーを導入するかもしれない。
【課題を解決するための手段】
【0015】
この発明によると、イメージを再編成するために複数のマスクの使用が示唆される。
【0016】
特に、この発明の態様は、医療画像処理における使用のためのイメージ登録方法を提案する。その方法は、イメージのシーケンスを提供するステップから始まり、各イメージは分析下の身体部分のディジタル表示を含む。参照イメージはシーケンス(動画を定義するシーケンスの残りのイメージがある)の中で選択される。そして、動画(または、それの少なくとも一部)は参照イメージに関して再編成される。再編成のステップは以下の操作を含む。最初に、区切りマスク(動画が再編成されなければならない参照イメージの領域を特定する)、および、特徴マスク(再整列が計算される参照イメージのさらなる領域を特定する)が定義される。参照イメージに関する動画の変位を補償するための最適化された変換は、その後、決定される。この操作は、類似性の測定を最適化することによって、実行され、その測定は3つの代替の方法で計算されてもよい。第1の実施では、類似性の測定は、第1の計算領域(計算マスクにより、参照イメージ上で特定される)と、第2の計算領域(その領域は、提案された変換に基づき変換された動画上の計算マスクによって特定される)との間で計算される。その計算マスクは、提案された変換に基づき変換された区切りマスクと特徴マスクとの間の交差部により決定される。第2の実施では、類似性の測定は、第1の計算領域(その領域は、提案された変換に基づき変換された参照イメージで計算マスクによって特定される)と、第2の計算領域(その領域は、動画の計算マスクによって特定される)との間で計算される。その計算マスクは、提案された変換に基づき変換された特徴マスクと、区切りマスクの間の交差部により決定される。第3の実施では、類似性の測定は、第1の計算領域(その領域は、提案された変換の反比例に基づき変換された計算マスクにより、参照イメージ上で特定される)と、第2目の計算領域(動画の計算マスクによって特定される)との間で計算される。その計算マスクは再び、提案された変換に基づき変換された特徴マスクと、区切りマスクの間の交差部により決定される。そして、最適化された変換に基づき、動画、またはその関連部分が変換される。
【0017】
特に、この結果は、第1の実施における最適化された変更自身を、または、第2および第3の実施における最適化された変換の反比例を適用することによって、獲得される。
【0018】
この発明の実施例では、各動画に対する最適化された変更は、反復のプロセスを通じて決定され、そのプロセスは、類似性測定(または、それの変換)が閾値に達するまで、1回以上のループの実行を伴なう。
【0019】
通常、同じ操作は、各々のさらなる動画のシーケンスに対して繰り返される。
【0020】
この発明の特定の実施例では、特徴マスクは区切りマスク内で定義される。
【0021】
都合上、特徴マスクは区切りマスクの50%より大きい。
【0022】
さらなる強化として、互いの情報測定(例えば、2つの計算領域の間の標準化された相互の情報から成る)が利用される。
【0023】
この好ましい実施例は、イメージの処理前に、そのイメージをサブサンプリングすることを備える。この操作はサブサンプリングファクタに基づき、そのファクタは、空間分解能に基づき、参照イメージ(差別することができる最小の意義ある要素を特定)の各次元に沿って計算される。
【0024】
さらなる強化として、空間分解能は、特徴マスクから得られる参照イメージの長方形の領域内で見積もられる。その方法の性能を向上させる方法は、1つ以上の以前の動画のために最適化された変換に基づき、各動画のための提案された変換を初期化することである。
【0025】
望ましくは、その初期化は、以前の多くの動画のために最適化された変換に基づく予測のアルゴリズムによって実行される。
【0026】
さらなる改良として、いくつかの動画(その個数は、現在の動画のための最適化された変換の勾配に基づき決定される)は、最適化手順の間、スキップされてもよい。スキップされた動画の各々に対する最適化された変換はその後、補間により得られる。
【0027】
この発明の都合のよい実施例では、参照イメージは、2つのサブのシーケンスに仕切るため、イメージのシーケンスの境界(すなわち、1番目と最後のもの)と異なる。
【0028】
(提案され、最適化された)変更のための提案された選択は、固定の変換から成り、その固定の変換は、対応する変換(つまり、一つ以上の変換化および/または一つ以上の回転)により決定される。
【0029】
さらなる改良として、最適化された変換を適用する前または後に、区切りマスクの外にあるそれぞれの動画のいずれの視覚化のイメージ要素も廃棄される。
【0030】
この発明の好ましい実施では、イメージは、そのイメージの少なくとも1つにおいて捨てられた視覚化要素を捨てることによって、そのようにして得られた低減イメージは、その後分析のために使用される。
【0031】
(潅流査定などの)特定のアプリケーションでは、さらなる視覚化要素は各イメージにおいて捨てられる。このために、その方法は、シーケンス内で最も強いイメージとで最も強くないイメージを(例えばそれらの平均した明るさに基づき)特定する。捨てられるべきである視覚化要素は、最も強いイメージと最も強くないイメージでの対応する視覚化要素の差が閾値より低いものから成る。
【0032】
可能な拡大として、各イメージは、(対応する身体部分を示す)多くのフレームを含む。この場合、区切りマスクと特徴マスクは2個以上のフレーム上で定義される。通常、この発明の方法は、超音波画像診断アプリケーションで適用される。
【0033】
一般性からそれることなく、提案された方法は、潅流査定における使用のために明確に設計される。
【0034】
この発明のさらなる態様は、上で説明された方法を実行するためのコンピュータプログラムを提案する。
【0035】
この発明のさらなる態様は、そのプログラムを具体化する製品を提案する。
【0036】
この発明の異なる態様は、対応するイメージ登録装置を提供する。
【0037】
さらにこの発明のもう一つの態様は登録装置を含む画像診断システムを提案する。
【0038】
この発明の特徴づける特徴は、添付されたクレームで詳しく説明される。この発明自体、しかしながら、それのさらなる特徴および利点と同様に、単に限定するものでない以下の詳述な説明を、添付した図面に関連して読むことにより、最良に理解されるであろう。
【発明を実施するための最良の形態】
【0039】
特に図1を参照すると、画像診断システム100が図示されている。そのシステム100は、形態の送受信機の(リニアまたはマトリックス)アレープローブ110を持つ中央ユニット105を持つ超音波スキャナからなる。そのプローブ110は、超音波波を送信(例えば、2から10MHzの間の中心周波数)を送信し、そして、組織構造および/または、造影剤(分析されるべき身体部分120の患者115の皮膚に接触するとき)により超音波の反射から生じるエコー信号を受信する。プローブ110は、上記のパルスエコーモードでプローブ110の使用を可能にする送信/受信マルチプレクサを備える。
【0040】
中央のユニット105は、マザーボード125を収納し、その上には、スキャナ100の動作を制御する電子回路(マイクロプロセッサや、ワーキングメモリやハード・ディスク・ドライブなどの)が装着される。そのうえ、1つ以上のドーター・ボード(その全体を130で示す)がマザーボード125上に差し込まれる。そのドーター・ボード130は、プローブ110を駆動するための電子回路を提供する。典型的に、それらの電子回路は、超音波波を発生させるためのビーム形成器およびパルス発生器、時間利得補正(TGC)回路を備えるプリアンプ、エコー信号を処理するためのAD変換器(ADC)、3D構成器、およびイメージとしてエコー信号を表すためのスキャン・コンバータを含む。
【0041】
また、スキャナ100は、取り外し可能なデータサポートメディア140(CD-ROMなどの)を読み取るためのドライバ135を備えることができる。モニター145は、分析下で身体部分120を表すイメージを表示するために使用される。 そのうえ、キーボード150は、従来の方法で中央ユニット105に接続される。そのキーボード150は、モニター145のスクリーン上のポインタ(図では示さず)の位置を操作するために使用されるトラックボール155を備える。
【0042】
図2aに移行すると、この発明の実施例に基づく解決策を実施するのに使用することができるメインのソフトウェアコンポーネントが、参照番号200で全体が示される。その情報(プログラムとデータ)は、ハードディスクに通常保存されて、そして、プログラムが実行しているとき、少なくとも部分的に、ワーキングメモリにロードされ、同時に、オペレーティングシステムと他のアプリケーション・プログラム(図では示さず)もロードされる。そのプログラムは最初に、1枚以上のCD-ROMからハードディスクにインストールされる。以下の図面では、いずれのマトリクスも実線の矢印で示され、他方、対応するビデオ描写は、オープンの矢印で示される。そのうえ、一時的な一連の一般的な対象物からなるいずれのシーケンスも太字の矢印で示され、組みの値からなるベクトルは点線の矢印で示される。
【0043】
特に、格納器 205は、例えば前述したスキャナにより説明されたスキャナで)イメージIのシーケンスを格納するのに使用される。このために、分析中の身体の部分は望ましくは、以前に言及されていたように、造影剤の超音波を受ける。造影剤は、注入によるなどのように、連続した流れ、または、かたまりとして管理することができる。望ましくは、分析中の身体部分は潅流のプロセスを受ける。特に、造影剤(ガス充填のマイクロ気泡から成る)が分析されるために身体部分に達する予定された期間(例えば、数秒)の後に、高エネルギー超音波パルスが適用される。そのエネルギーは、マイクロ気泡の破壊後、かつ、安定した潅流状態(連続した流れの場合)か潅流の最大値(かたまりの管理の場合)が達した時、正確に測定された値の間に受信されたエコー信号のかなりの変化の検出を許可するために、マイクロ気泡の多くの部分(例えば、少なくとも50%)の破壊を引き起こすために十分でなければならない。身体部分へ造影剤の流れを(例えば30-80 msの解像度で)追跡するために、次に、身体部分の連続したイメージのシーケンスが取られる。
【0044】
各イメージは身体部分のディジタル描写から成る。そのイメージは、多数の視覚化要素、通常マトリクス(例えばのM=512列とN=512行)の形態で定義される。それぞれの視覚化要素は、画素(ピクセル)やボリューム要素(ボクセル)のように、イメージの基本的な領域を示す。通常、視覚化要素は、画素(または、ボクセル)に割り当てられたエコー強度を示す白の0から黒の255の値(例えば8ビットの場合)から成る。また、通常、そのイメージは、デジタルフィルタ(例えば、バンドパスフィルタ)と他の信号コンディショナ(例えば、ポストビームの形成TGC)を通して処理される。更にそのイメージは、復調器(エコーのエンベロープの振幅を計数するために)と非線形のコンディショナー(対数圧縮器など)を通してさらに処理される。望ましくは、各イメージIのシーケンスは、対応するファイルによって、イメージ格納205内でコード化される。そのファイルは、それぞれのイメージに関する行(M)と列(N)の数、およびイメージのシーケンスの数を保存する。 そのファイルは次に、イメージ(各々の一つが対応するピクセル値のためのMxNバイトから成る)を表す記録のストリームを含む。
【0045】
イメージのシーケンスIは、登録モジュール210に入力される。その登録モジュール210は、分析で身体部分の対応する動きを補償するために、イメージを再編成する。登録モジュール210は、イメージIのシーケンスを、格納器205に格納された対応するファイルからロードし(そしてデコード)するために、グラフィカルユーザインタフェイス(GUI)215を含む。特にイメージIのシーケンスは、セレクタ220に提供される。そのセレクタ220は、オペレータに、イメージを表示させ、そしてそれらのイメージの一つを参照イメージとして選択することを許可する。他のイメージのシーケンス(動画として呼ばれる)は、参照イメージに対し、(登録プロセスを通じて)再編されるべきである。参照イメージIrは、イメージのシーケンスの境界(つまり、最初の一つと最後の一つ)と異なり、そのシーケンスを、参照イメージIrから第1のイメージまでのサブシーケンスに仕切り、および、参照イメージIrから最後のイメージまでのサブシーケンスに仕切る。そして、最も実際的な実用化では、参照イメージIrは、登録プロセスを容易にするために、より貴重な情報を含む。
【0046】
参照イメージIrは、描画モジュール225によりアクセスされ、その描画モジュール225は、そこで、区切りマスクMdと特徴マスクMfを決定するために使用される。区切りマスクMdは、分析プロセス(それによって動画が再編成される)のために、関心のある領域(ROI)を特定する。区切りマスクMdの定義は、補償されるべき動きに起因する全体の移動を考慮に入れることであり、その、区切りマスクMdはまた、オペレータに、テキストおよび他の要求されない情報(もしあるならば)を含むイメージの領域を捨てさせることを許可する。このことは、いずれのシステム(提供されるイメージの形式の如何にかかわらず)においても提案された解決策の適用を可能にする。他方、特徴マスクMfは、再整列について計算するのに使用される領域を(身体の部分の形態学的な特徴に基づいて)特定する。対応する領域が、分析の身体部分の関連解剖学的な一部分の表示を含むように、特徴マスクMfの描画は、通常、オペレータに関する解剖学的な知識から有利になる。望ましくは、特徴マスクMfは、区切りマスクMd内に描かれる。そのうえ、最も実際的な実用化では、特徴マスクMfは、参照イメージIrのかなりの部分を区切る。例えば、特徴マスクMfは、区切りマスクMdの50%より大きい。好ましくは、特徴マスクのサイズは、区切りマスクMdのサイズの50%-80% (更に望ましくは、55%-65%) である。この値は、高精度と短い計算時間の相対する要件の間で、良好な妥協を提供する。通常、各マスクMd,Mfは、MxNビットのマトリクスで表される。典型的に、マスク内のビットは、論理値1が割り当てられ、一方、マスク外のビットは論理値0が割り当てられる。参照イメージIr上で描画される区切りマスクMdと特徴マスクMfに関する例は図2bで示される。
【0047】
図2aを参照すると、この目的のためにイメージシーケンスIの、区切りマスクMdの、および、特徴マスクMfのビデオ表示がモニタデバイス230により表示される。また、イメージのシーケンスI、参照イメージIr、区切りマスクMd、および特徴マスクMfは、登録プロセッサ235に供給される。登録プロセッサ235は、参照イメージIrに関してそれぞれの動画の動きを補償して、登録イメージRIの対応するシーケンスを得る。登録イメージRIのシーケンスは、格納器205に格納され、そして、次に、それはモニタードライブ230により、表示するために利用できる。
【0048】
登録されたイメージシーケンスRIも、フロー定量化モジュール240に供給される。そのモジュールは、潅流の定量化パラメータについて計算するために使用される。また、フロー定量化モジュール240は、登録プロセッサ235から空間分解能セルCrおよびカットマスクMtの定義を受け取る。登録プロセッサ235の意義は以下で明白となる。フロー定量化モジュール240は、パラメトリックイメージPIを出力し、そのパラメトリックイメージPIは、潅流のプロセスの結果のグラフ表示を与える。そのパラメトリックイメージPIは、対応する格納器245に格納され、そして、次に、それはモニタードライブ230を通じて表示のために利用可能である。
【0049】
図3に移行すると、登録プロセッサ235は、カスケード接続された空間サブサンプラー305、移動見積り器310、および登録イメージシーケンサ315から成る。
【0050】
特に、空間サブサンプラー305は、処理されるべき情報量を減少させるために使用される。その空間サブサンプラー305は、特徴マスクMf、区切りマスクMd、参照イメージIr、およびイメージIのシーケンスを受け取る。その空間サブサンプラー305は従って、サブサンプリングされた特徴マスクSMf、サブサンプリングされた区切りマスク SMd、サブサンプリングされた参照イメージSIrおよび サブサンプリングされたイメージSIのシーケンスを出力する。
【0051】
移動見積り器310は、それぞれのイメージの移動を補償する変換を決定するのに使用される。このために、移動見積り器310は、サブサンプリングされた特徴マスクSMf、サブサンプリングされた区切りマスク SMd、サブサンプリングされた参照イメージSIrおよび サブサンプリングされたイメージSIのシーケンスを(空間サブサンプラー305から)受け取る。望ましくは、その変換は、厳密なタイプ(すなわち、すべての距離を保持する変換)である。問題の例では、その変換は、横軸(X)に沿った変換、軸(Y)に沿った変換、および回転角(θ)に沿った変換を指定する3つの要素により定義される。提案された選択は、許容できる計算の複雑さでもって良い結果を提供する。その結果、移動見積り器310は、対応する変換Tのシーケンスを発生させ、それは登録イメージシーケンサ315に供給される。
【0052】
また、登録イメージシーケンサ315は、区切りマスクMdとイメージIのシーケンスを受け取る。登録イメージシーケンサ315は、変換Tのシーケンスに基づき、イメージIのシーケンスをアップデートして、登録イメージRIの対応するシーケンスを発生する。さらに、登録イメージシーケンサ315は、カットマスクMtを決定し、それはフロー定量化モジュールMtに提供される。
【0053】
次に図4aを参照すると、空間サブサンプラー305の構造が詳細に例証される。特に、特徴マスクMfは、調整器405に供給され、その調整器405は、対応する調整された特徴マスクRMfを決定する。調整された特徴マスクRMfは、特徴マスクMfを含む最小の長方形から成る。同様に、区切りマスクMdは、別の調整器410に供給される。その調整器410は、対応する調整された区切りマスクRMd(これは区切りマスクMdを含む最小の長方形から成る)を決定する。調整された特徴マスクRMfは、乗算オペレータ415を通して、参照イメージIrに乗算される。より詳細には、調整された特徴マスクRMfの対応する論理値が、参照イメージIrの各ピクセル値に乗算される。その結果、調整された特徴マスクMf内の画素値は、変化されずに残り、他方、(次の処理の間に捨てられるように)他の画素値は0にリセットされる。この操作は、対応する限定参照イメージLIrを生成する。同様に、有限なイメージLIのシーケンスは、別の乗算オペレータ420を通じて、調整された区切りマスクRMdを、イメージIのシーケンスに乗算することによって発生される。
【0054】
限定参照イメージLIrは空間周波数分析器425に入力され、空間解像度セルCrのサイズが計算される。そのセルCrは、それの各サイズに沿って限定参照イメージLIrの空間分解能を定義する。その空間分解能は、識別できる重要度が最小の要素を特定し、特に、超音波画像診断の場合、イメージ内で通常目に見える小斑点粒から成る重要な要素を特定する。
【0055】
この目的のために、空間周波数分析器425は、限定参照イメージLIrから見積り領域Reをサンプリングする。見積り領域Reは、調整された特徴マスクRMfによって定義された長方形の領域の各寸法内に、(左上隅から始めて)2ピクセル数の最大パワーを含む。特徴マスクMf、調整された特徴マスクRMf、および対応する見積り領域Reのイラストは図4bで示される。例えば、調整された特徴マスクRMfに115×140画素のサイズがあるなら、見積り領域Reは 64×128=26×27の画素から成る。
【0056】
図4aに戻ると、空間周波数分析器425は、各寸法に沿って見積り領域Reの平均パワースペクトル密度を決定する。望ましくは、このプロセスは、見積り領域Reのそれぞれの列と行について、離散的なフーリエ変換(高速フーリエ変換、またはFFTなどの)を適用することにより、実行され、次に、各寸法に対して得られるように、その結果が平均される。通常、空間周波数は「ピクセル数の逆数」の単位で表される。他方、平均パワースペクトル密度は、0と100の間で正規化され、DC要素の影響を取り除くためにDC要素に割り当てられる0の値を持つ。見積り領域Reの長方形の形は、いずれの境界効果(これは、特徴マスクMfの可能な異形によって導入される)も回避し、そのうえ、2のパワーとしての見積り領域Reのサイズの選択は、(FFTはDanielson-Lanczos 補助定理によって計算できるので)処理速度を上げることに注意されるべきである。横軸(Dx)とY軸(Dy)に沿った平均パワースペクトル密度の分布が図4cで示される。
【0057】
図4dを考察すると、累積しているスペクトルエネルギーの対応する分布Ex,Ey を入手するために、密度分布Dx、Dyは、空間周波数に関して統合される。実質的にエネルギーを保持するしきい値Thは、分布Ex,Eyに適用される。望ましくは、そのしきい値は、80%から99.9%、より望ましくは85%から99.5%、更により望ましくは、90%から99%の間からなり、例えば98%である。分布Ex and Ey内のしきい値Thでエネルギーを提供する空間周波数(それぞれfx および fyで示される)は、次に決定される。(ピクセル数における、サブサンプリングの期間を定義する)サブサンプリング要素PxとPyは、それぞれ整数に丸められた2・fx および 2・fyの逆数により与えられる。図中の示した例では、しきい値Thでエネルギーを与える空間周波数fxおよびfyは、それぞれ0.1および0.2に等しい。したがって、サブサンプリング要素PxとPyは以下の通りになるであろう。
【数1】
【0058】
図4aに戻り、空間的なサブサンプラー305は、(並列動作する)4つのデシメータのバンク430を含む。各デシメータ430は、空間的解像度セルCrを受け取り、それは、フロー定量化モジュールに送信される。特徴マスクMf、区切りマスクMd、限定参照イメージLIr、および限定イメージLIのシーケンスはそれぞれのデシメータ430に提供され、それは、対応するサブサンプリングされた特徴マスクSMf、サブサンプリングされた区切りマスクSMd、サブサンプリングされた参照イメージSIr、およびサブサンプリングされたイメージSIのシーケンスを出力する。各デシメータ430は、解像度セルCrに基づき、それぞれの入力マトリックスを減じる。これは、実質的に、情報内容(器官解剖学か形態学)に影響することなく、処理されるためのデータ量を大きく低減する。このために、そのデシメータ430は最初に、ローパスフィルタ処理を入力マトリックスに適用する。望ましくは、このプロセスはリニアフィルタによって実行される。より詳細には、入力マトリックスは、Px列とPy行を持つカーネルで包囲される。カーネルの各セルは、1/( Px・Py)の値が割り当てられる。その結果、入力マトリックスの各画素は、画素上の中心に位置する入力マトリックスの対応する部分により、カーネルの生成物の平均値で取り替えられる。このように、入力マトリックスの内容は、(それぞれ横軸とY軸に沿った)サブサンプリング要素Px および Pyに依存するカッオフ周波数を持つローパスフィルタである。したがって、(次のサブサンプリング作業で誤りを導入する)いかなるノイズピークもこの入力マトリックスから除去される。(フィルタ処理される)入力マトリックスは低速度で再度サンプリングされる。言い換えれば、デシメータ430は、X軸に沿ってすべての画素Pxを、およびY軸に沿ってすべての画素Pyを再度サンプリングする。上で説明された操作は、Px・Pyに比例する要素により、各入力マトリックスのサイズの低減を可能にする。
【0059】
図5aを参照すると、移動見積器310の構造が詳細に例証される。特に、サブサンプリングされたイメージSIのシーケンスはイメージセレクタ505に提供される。セレクタ505は、番号を決定する選択パラメータNsに基づいて、シーケンスからイメージSIをサンプリングする。選択されたサブサンプリングされたイメージSIは、最適化ループ510に供給される。それは、サブサンプリングされた参照イメージSIrに関して選択されたサブサンプリングされたイメージSIの整列を示す類似性測定を最大にする変換を計算する。以下で説明されるように、この最適化ループ510は、選択されたイメージの領域で動作する。この領域は、特徴マスクによって特定された参照イメージの部分に対応する領域を表す。その特徴マスクは、関連した変換を適用した後、区切りマスク内に留まる。望ましくは、その最適化ループ510は、画素ベースのアルゴリズムを実行し、そのアルゴリズムは、(解決策の強固さを増加させるように)上記の領域の全体の内容で動作する。
【0060】
より明確には、選択されたサブサンプリングされたイメージSIは、幾何学的変換器515に入力される。また、その幾何学的変換器515は、サブサンプリングされた区切りマスクSMdおよび提案された変換Tp(以下で説明されるように発生される)を受け取る。幾何学的変換器515は、選択されたサブサンプリングされたイメージSIとサブサンプリングされた区切りマスクSMdを、提案された変換Tpに基づいて変え、対応する変換されたイメージTIおよび変換された区切りマスクTMを得る(図5bを参照)。このために、望ましくは、幾何学的変換器515は、(例えば最も近いアルゴリズムに基づき)サブの画素解像度を与える補間器が備えられる。
【0061】
変換された区切りマスクTMdは、次に、乗算オペレータ520を通してサブサンプリングされる特徴マスクSMfに適用される。乗算オペレータ520の動作は、計算マスクMcを発生する。その計算マスクMcは、サブサンプリングされた特徴マスクSMfと、変換された区切りマスクTMdとの交差部に対応する(図5cを参照)。従って、(提案された変換Tpに対応する)変換された区切りマスクTMdの置換で、サブサンプリングされた特徴マスクSMfに、変換された区切りマスクTMdを生じさせた時、計算マスクMcは、変換された区切りマスクTMd内のサブサンプリングされた特徴マスクSMfの一部から成るであろう。
【0062】
次に、(乗数オペレータ525により)計算マスクMcを、変換されたイメージTIsに乗算することにより、計算で限定された浮動イメージCIfが発生される。同様に(別の乗数オペレータ530により)同じ計算マスクMcを、サブサンプリングされたイメージSIrに乗算することにより、計算で限定された参照イメージCIrが発生される。計算で限定された浮動イメージCIfと計算で限定された参照イメージCIrは、類似性計算機535に入力される。その計算機535は、計算で限定された参照イメージCIrに関し、計算で限定された浮動イメージCIfの整列を示す類似性測定Vを提供する。結果として、類似性測定Vsの計算は、計算マスクMcによって区切られた2つのイメージの部分に限定される(貴重な情報が両方のイメージで利用可能である)。このように、サブサンプリングされた参照イメージSIr上で、サブサンプリングされた区切りマスクSMdによって定義された領域の外での要素を想像することにより、引き起こされた潅流査定の結果のいずれの劣化も回避できる。
【0063】
便宜上、類似性測定Vsは、正規化にされた相互情報(NMI)から成る。これは、再編成されるべきイメージのエントロピー測定に基づく、情報理論に用いられる測定である。特に、p(a)とp(b)は、それぞれヒストグラムを用いて計算された、一般的なイメージAとBにおける画素値の確率分布を示し、対応する限界エントロピーH(A) および H(B)は次式で示される。
【数2】
【0064】
限界エントロピーのH(A)とH(B)は、イメージAとBに関する情報量(すなわち、不確実性)を示し、イメージA、Bのヒストグラムが同質であるときは、より高く、そして、それらのヒストグラムが多くの広いピークを示す時は減少するエントロピーをそれぞれ持つ。
【0065】
同様に、イメージAとBの合成エントロピーH(A、B)は次式で与えられる。
【数3】
ここで、p(a、b)はイメージAとBの合成ヒストグラムから計算された複合確率分布である。合成エントロピーH(A、B)は、2つのイメージAとBが結合された時、両イメージの情報量を測定する。したがって、合成エントロピーH(A、B)は、2つのイメージAとBが最適に並べられたとき、最小量であり、それらの整列不良で(合成ヒストグラムに新しいピークが出現することにより)増加する。しかしながら、合成エントロピーH(A、B)は、2つのイメージAとBの重なっている領域のみについて計算できるので、重なりの程度によって変化する。
【0066】
この問題の解決策は、相互情報MI(A、B)によって与えられ、その相互情報MI(A、B)は、限界エントロピーH(A)とH(B)の合計と、2つのイメージA,Bの重なり領域における対応する合成エントロピーH(A、B)との差として定義される。
MI(A,B)=H(A)+H(B)-H(A,B)
【0067】
このように、合成エントロピーH(A、B)は、限界エントロピーH(A)とH(B)に関して正規化され、そして、重なっている領域の範囲への依存は、実質的に減少する。しかしながら、イメージAとBの(特にそれらの周りのイメージのために)非常に低い強度領域の重なりの変化は、不均衡に相互情報MI(A、B)に貢献する。様々な計画で相互情報MI(A、B)を正規化することによって、改善を得ることができる。正規化された相互報NMI(A、B)の提案された形態は次式で与えられる。
NMI(A,B)=[H(A)+H(B)]/H(A,B)
【0068】
正規化された相互情報(以下に、単に相互情報と呼ぶ)は、再編成されるべきであるイメージ内の画素の強度に鈍感である。したがって、この類似性測定は、どのような構造的な違い(および特に造影剤のフラックスによって身体部分に引き起こされたもの)も無視して、移動を補償する。この選択は、特に潅流査定において優秀な結果を提供する。
【0069】
便宜上、その相互情報は、合成エントロピーH(A、B)を提供する合成ヒストグラムを単に利用することで計算される。特に、合成ヒストグラムの各軸は、イメージAとBにおけるそれぞれピクセル値を指定する。そして、ヒストグラムの各ポイントは、2つのイメージA、Bにおける対応するピクセル値の合成確率を提供する。したがって、(各画素値のために)もう片方のイメージの軸に沿って合成確率を合計することによって、各イメージのための確率分布について計算することは可能である。
【0070】
計算機535によって出力された類似性測定Vsは、最適化器540に供給される。また、その最適化器540は、予測された変換Teを受け、その変換Teは、最適化手順を最適に接近させ、これにより、ローカルの最大値に陥るリスクを軽減するように、最適化器540の初期化のために用いられる。その最適化器540は、(計算で限定された浮動イメージCIfと計算で限定された参照イメージCIrとの間で)相互情報を繰り返しの手順で最大にする変換を計算する。望ましくは、この手順は、最も急な勾配のアルゴリズムに基づく。特に、各繰り返しのときに、最適化器540は、相互情報の最も高い勾配に対応する好ましい命令について計算する。中心の限定差分を使用することで勾配ΔNMI(x)を定義する導関数が実際に近似される。
ΔNMI(x)=[NMI(x+dx)-NMI(x-dx)]/2・dx
【0071】
次に、提案された変換Tpは、好ましい命令に沿って交互情報を最大にすることによって、計算される。プロセスを繰り返すために、提案された変換Tpは、幾何学的変換器515に提供される。相互情報における変化が閾値(例えば、5-10%)以下に低下した時、または、設定された繰り返し回数(例えば、10から15)の後で、最適化手順は終了する。選ばれたアルゴリズムは、短い計算時間で非常に正確な結果に提供し、例えば、アルゴリズムは典型的に、5回未満の繰り返しで収束する。
【0072】
最適化手順がいったん終わると、対応する最終の変換Tfが最適化器540により、変換シーケンサ545に提供される。そのモジュール545は、受け取った値から、サブサンプリングされた変換STのシーケンスを構築する。このために、(現在選択されたサブサンプリングされたイメージSIのための)最終的な変換Tfは、シーケンスSTに加えられる。(選択パラメータNsに基づき)シーケンスSIの1つ以上のサブサンプリングされたイメージが、イメージ選択器505によってスキップされたと仮定すると、これらのスキップされたサブサンプリングされたイメージSIに対する変換は、補間により計算される。
【0073】
サブサンプリングされた変換STのシーケンスは、予測移動モデル550に提供される。予測移動モデル550は、選択パラメータNs(これは、次に処理されるべきサブサンプリングされるイメージSIをサンプリングするためにイメージ選択器505に供給される)および、対応する予測された変換Te(これは、最適化手順を初期化するために最適化器540に供給される)を決定する。このために(明確化のために図では示されない)、予測移動モデル550は、シーケンス中のイメージの総数と、参照イメージの位置を受けなければならない。
【0074】
望ましくは、予測移動モデル550は、サブサンプリングされた変換のシーケンスSTのそれぞれの要素(X、Y、およびθ)の勾配について計算する。例えば、この操作は、最後の変換の各要素を、シーケンスST内での前の変換の対応する要素に結合するセグメントの傾斜を単に決定することで、実行される。選択パラメータNsは、その後、最も急である勾配の1つに基づいて計算される。例えば、最も急な勾配の角度係数が0.5より低いときに、シーケンス中で2つのイメージがスキップされ、角度係数が0.5から0.8の間のときに、シーケンス中で1つのイメージがスキップされ、そして、角度係数が0.8より高いときに、イメージはスキップされない。シーケンスSIのサブサンプリングされたイメージが実質的に変動しないとき、このように、シーケンスSIのサブサンプリングされたイメージの多くがスキップされ、その結果、不要な計算を回避する。一方、シーケンスSIのサブサンプリングされたイメージが鋭く変化するとき、シーケンスSIのサブサンプリングされたイメージの少ない量がスキップされ、その結果、良好な精度を保証する。この時のサブサンプリングは大きく処理時間を短縮し、そのうえ、その手順は、流動的な動画に自己適合する。
【0075】
そして、予測移動モデル550は、次のイメージが処理されるために、予測変換Teについて計算(そのように入手された選択パラメータNsによって特定される)する。変換の各要素X、Y、およびθに対し、このプロセスは望ましくは、単に、(最後の2回の利用可能な変換から)直線性の推定を適用して実行される。変換の模範的シーケンスの要素X、Y、およびθは図5dで示される。この場合、最も急な勾配は、要素θ(例えば0.6の角度係数)によって与えられる。その結果、ただ一つのサブサンプリングされたイメージは、シーケンスSI中でスキップされる。予測された変換Teを定義するそれぞれの要素(X、Y、およびθ)の値は、対応する矢印によって定義される。この選択は、できる限り高速な変換を見つける確率を大きく増加させる。
【0076】
図5aに戻って、サブサンプリングされた変換ST(かつて完全な)のシーケンスは、移動フィルタ555に供給される。フィルタ処理された変換FTの対応するシーケンスを得るために、移動フィルタ555は、シーケンスのそれぞれのサブサンプリングされた変換STにローパスフィルタを適用することにより、移動の補償の効果を整える。完全分解能プロセッサ560は、フィルタ処理された変換FTのシーケンスから変換Tのシーケンスを発生させる。それぞれフィルタ処理された変換FTのシーケンスの変換要素(XとY)は、分析セルCr (それぞれがPx および Py)の対応するサブサンプリング要素が乗算される。そして、このようにして得られた変換Tのシーケンスは、登録イメージシーケンサに転送される。
【0077】
図6aに進むと、登録イメージシーケンサ315の構造が詳細に例証される。特に、区切りマスクMdは、乗算オペレータ605を通じて各イメージIのシーケンスに適用される。この動作は、区切られたイメージDIの対応するシーケンスを発生させる。区切られたイメージDIのシーケンスおよび変換Tのシーケンスは、幾何学的変換器610に供給される。幾何学的変換器610は、それぞれの区切られたイメージDIのシーケンスを、シーケンスTの対応する変換に従って移動して変換された区切られたイメージTDIのシーケンスを発生させる。そして、乗算オペレータ615を通して、区切りマスクMdを、シーケンスTDIのそれぞれの変換された区切られたイメージに適用することによって、マスクされた区切られたイメージKTDIのシーケンスが得られる(図6bを参照)。このように、(変換Tのシーケンスを適用する前に)区切りマスクMdの外にあった画素と、(変換Tのシーケンスを適用した後の)区切りマスクMdの外へ移動する画素は自動的に捨てられる。
【0078】
同時に、区切りマスクMdは、インバータ620に提供され、そのインバータ620は、対応する反転区切りマスクMdを発生する。反転区切りマスクMdは、乗算オペレータ625を通して、シーケンスIの各イメージに適用され、対応するマスクされたイメージKIのシーケンスを得る。各々のマスクされたイメージのシーケンスKIは、次に、区切りマスクMdの外側の画素のみを含む(図6cを参照)。マスクされたイメージKIのシーケンスと、マスクされ変換された、区切られたイメージKTDIのシーケンスは、加算オペレータ640に入力される。2つのシーケンスの各イメージ対のために、加算オペレータ640は、画素ごとに対応する値の合計を計算する。この動作は登録されたイメージRIのシーケンスを発生させる。このように、マスクMdによって区切られたそれぞれのイメージの領域は、(捨てられた画素を取り除いて)再編成され、マスクMd外のイメージの部分は、変化されずに残される(図6dを参照)。
【0079】
登録イメージシーケンサ315は、更に幾何学的変換器645を含み、これは、区切りマスクMd および 変換Tのシーケンスを受け取る。幾何学的変換器645は、各変換Tのシーケンスを区切りマスクMdに適用して、変換された区切りマスクTMdの対応するシーケンスを発生する。変換された区切りマスクTMdのシーケンスは、カットしたマスクMtを発生する交差オペレータ650に提供する(図6eを参照)。このように、カットしたマスクMtは、貴重な情報がすべての登録イメージRI内で利用できる区切りマスクMdの一部に制限される。
【0080】
次に図7を参照すると、フロー定量化モジュール240の構造が詳細に例証される。特に、カットしたマスクMtは、乗算オペレータ705を通して、各登録イメージRIのシーケンスに適用され、イメージ内の無関係の情報が自動的に取り除かれる。この動作はカットしたイメージCIの対応するシーケンスを発生させる。カットしたイメージCIのシーケンスと空間分解能セルCrは、デシメータに供給される。デシメータ710は、上で登録プロセッサの空間的なサブ見本集に関して説明されたものと正しく同一である。特に、デシメータ710は、ローパスフィルタリングを適用し、そして空間分解能セルCrに基づき、各カットイメージCIのシーケンスを再サンプリングし、サブサンプリングされたカットイメージSCIの対応するシーケンスを得る。
【0081】
サブサンプリングされたカットイメージSCIのシーケンスは、低減したマスクMrを出力する低減器715に入力される。このために、低減器715は初めに、シーケンスSCIのそれぞれのサブサンプリングされたカットイメージの平均した明るさについて計算して、そのシーケンスの最も明るいイメージと最も暗いイメージを認識する。低減器715は、最も明るいイメージと最も暗いイメージの差を計算する。対応する画素のイメージ差が許容できる閾値(例えばイメージ差の最大値の5% から 20% の間)より高いなら、低減しているマスクMrの各画素に論理値1が割り当てられ、そうでないなら0が割り当てられる。そして、低減しているマスクMrは、乗算オペレータ720を通して、シーケンスSCIのそれぞれのサブサンプリングされたカットイメージに適用され、低減したイメージDIの対応したシーケンスを得る。このように、低減されたイメージDIのシーケンスは、シーケンスSCI中の著しい変化を示す画素値を単に含み、他方、造影剤の流れによって影響されない画素は捨てられる。このように、イメージは、重要な情報を提供する視覚化する要素に制限され、これは、イメージにおけるバックグラウンドノイズによって引き起こされた誤りを大きく抑える。シーケンスの最も激しいイメージと最も激しくないイメージの流動的な選択が、造影剤(例えば連続的なフローまたは塊として)を管理するのに使用される技術の如何にかかわらず方法の正しい操作を確実にすることに注意されるべきである。
【0082】
低減されたイメージDIのシーケンスは、分析器725に供給される。その分析器725は、それらのイメージによって表された潅流のプロセスの量的なパラメータについて計算する。通常、分析器725は、それぞれの画素の強度における変化をプロットするタイム・カーブを決定する。そして、この潅流カーブは、時間(t)に対するピクセル値(v)の次の関数によって与えられたモノタイプの指数のモデルに適合される。
【数4】
(ここで βは初期の補間の間の傾斜を定義する定数、Aは最大の画素値を定義する別の定数)
【0083】
そして、分析器725は、A・βの積によりあたえられた(フローの)潅流値を各画素に関連づけることによって、パラメトリックイメージPIを発生させる。
【0084】
図8aから8cで示されるように、この発明の具体化は、スタートブロック802で始まる方法800を実行する。ブロック804に進むと、潅流のプロセスを受ける患者の身体部分のイメージシーケンスが取得される。
【0085】
次に、登録手順がシーケンスのイメージに適用され、典型的にその手順は、オフライン(例えば試験の終わり)に実行される。特に、その登録手順は、ブロック806で始まり、オペレータが(他の動画を再編成するための)参照イメージを選択する。次にブロック808では、オペレータは参照イメージ上の区切りマスクを定義しなければならない。このために、オペレータはプルダウンメニューから必要な形を選択できる。望ましくは、区切りマスクは多角形から成り、 非常に簡単な構造で高度の柔軟性を提供するので、提案された形は特に有利である。この場合、オペレータは参照イメージの一連のポイントを(マウスでそれらをクリックして)選択する。ポイントの選択は、ESCキーをタイプすることによって、終了する。彼らの選択命令により、ポイントを接合することによって定義されたカーブ(最後のポイントから最初のポイントまで動いて閉じるカーブがある)は、多角形を定義し、それは、モニター上に表示される。論理値1を多角形の内側のビットに、そして、論理値0を多角形の外側のビットに割り当てることにより、区切りマスクは、次に構築される。必要なら、区切りマスクに更に1つ以上の多角形を加えるため、上で説明された同じ操作が繰り返すことができる。同様に、オペレータはブロック810にて、参照イメージ上で特徴マスク(1つ以上の多角形から成る)を定義する。
【0086】
ブロック812に進むと、見積り領域が参照イメージからサンプリングされる。この方法は、次にブロック814へ進み、見積り領域の空間周波数分析に従って、空間分解能セルのサイズが計算される。そして、ブロック818でイメージおよび(区切りおよび特徴)マスクは、低減される、つまり、空間分解能セルに基づき、ローパスフィルタ処理され、再サンプル処理がなされる。
【0087】
(参照イメージに関して動画を再編成するために)動画に対して適用されるべき変換を計算してするために、シーケンス内の参照イメージによって定義されたそれぞれのサブシーケンスに対して、一度、ループが実行される。最初のループの繰り返し(ブロック820)は、参照イメージから最初のイメージまで減少している順に、動画に適用されます。そのループはブロック822でスタートし、0値に初期化された提案された変換でもって、参照イメージに近接した動画が選択される。ブロック824に進み、提案された変換は、現在の動画および区切りマスクとに適用される。計算マスクは次にブロック826で決定される。この方法はブロック827へ進み、それぞれ計算で限定された浮動イメージと計算で限定された参照イメージを得るために、計算マスクは、動画イメージおよび参照マスクとに適用される。ブロック828に進み、(2つのイメージの整列を示す)同様な測定が計算される。類似性測定における変化が、必要な閾値より高く、そして繰り返し数が最大許容値以下なら、この方法はブロック830へ進む。従って、提案された変換はアップデートされ、そして、次に、この方法はブロック824に戻り、アルゴリズムを繰り返す。
【0088】
逆に、その変化が、閾値を(または繰り返しの最大許容数の後に)下回るとき、活動のフローはブロック834へ下る。この段階では、そのように得た、提案された変換は、現在の動画のために完結される。そのうえ、スキップされた動画(もしあるならば)に対する変換は、補間により計算される。そうでなければ、動作のフローは、ブロック838に進み、(現在の動画のための)変換の要素に対する最も急な勾配が特定される。(適切であるなら)所望の動画をスキップするために、処理されるべき次の動画の選択パラメータは、ブロック840にて(そのように特定された最も急な勾配に従って)決定される。ブロック842に進み、次の動画のための予測された変換は、最後の2回の利用可能な変換から見積もられる。予測された変換は、次の動画のために最適化アルゴリズムを初期化するためにブロック844で使用される。この方法は次にブロック824に戻り、次の動画を処理する。
【0089】
サブシーケンスに関するすべての動画がいったん処理されると(ブロック836)、フローの動作はブロック846に下る。両方のサブシーケンスが分析されたかどうか決定するためのテストが行われる。そうでなければ、上で説明されたループは、参照イメージから最後のイメージまで増大する順の動画に対して、再繰り返される(ブロック848)。そして、この方法はブロック822に戻って、再びループをスタートさせる。
【0090】
戻ってブロック846を参照すると、すべての動画が処理されたなら、フローの動作はブロック850に進む。この段階では、そのように得られた変換のシーケンスはローパスフィルタで処理される。プロセスは次にブロック851に進み、(完全分解能の)変換のシーケンスは、(各変換された要素に、対応する分解能セルのサブサンプリングされたファクタを乗算して)フィルタ処理された変換のシーケンスから得られる。
【0091】
次にブロック852を参照すると、区切りマスクは動画に適用される。ブロック854に進むと、各々の得られた区切られたイメージは、対応する変換に基づき移動される。区切りマスクは再びブロック856にて、変換されたイメージに適用される。次にブロック858を参照すると、登録されたイメージは、(区切りマスク外側の元のイメージの対応する部分を加算することにより)完成され、そして保管される。同時に、カットするマスクはブロック860で決定される。
【0092】
そして、フロー定量化手順は、登録されたイメージのシーケンスに適用される。その手順はブロック862で開始され、カットするマスクは、登録されたイメージに適用される。カットされたイメージは次にブロック864にて、(空間分解能セルに基づき)低減される。ブロック866に進むと、低減器は、シーケンス中の最も明るいイメージと最も暗いイメージとを識別する。低減するマスクはブロック867でそれらのイメージから計算される。そして、カットされたイメージは、ブロック868でそのように得られたマスクを適用することによって低減される。次にブロック870では、すべての低減されたイメージ中のそれぞれの有効な画素(0以外の値を持つ)に対し、潅流プロセスの必要な量的なパラメータが計算される。得られたパラメトリックイメージは、対応する格納器に格納される。この方法は、最終のブロック872にて終了する。
【0093】
特徴マスクがシースルーの窓であるとみなすことによって、上で説明されたアルゴリズムをより直観的に説明することができる。この窓は、参照イメージの特徴を示し、その参照イメージは、再編成されるべき各動画でサーチされなければならない。このために、この方法は、その窓の下で常に動画をシフトさせ、次に、必要な特徴が見つけられたかどうか確かめる。それぞれの試みで、関心がない(すなわち、区切りマスクの外の)動画の領域が窓に入るなら、窓の対応する部分は見えなくされる。参照イメージ内およびシフトされた動画イメージ内の窓の明確な部分を通じて観察された領域は、その後に比較される。(所望されるレベルの精度で)適合が一旦見つけられると、そのように得られた動画は、参照イメージに対し自動的に再編成される。
【0094】
もちろん、動画上で窓を移動させ(所望の特徴をサーチする)ことによっても、同じ結果を得ることができる。この場合、窓が関心のない動画の領域に達するなら、また、窓の対応する部分が見えなくされる。しかしながら、その比較のための参照イメージで選択された特徴を特定するために、窓に対して参照イメージを動かすか、または窓を、参照イメージ上の元の位置に返すかが、必要となる。そのうえ、適合がいったん見つけられると、動画を正しく参照イメージに再編成するために、その動画は、逆方向に(窓のシフトに関して)シフトしなければならない。
【0095】
より正式には(簡単にするためにサブサンプリングの作業を無視する)、提案されたアルゴリズムの異なる実施では、あらゆる提案された変換が特徴マスクに適用される。計算マスクは、変換さけた特徴マスクと(元の)区切りマスクとの間の補間として、次に決定される。計算マスクは、(計算が限定された動画イメージを得るために)動画に適用される。計算が限定された参照イメージは、提案された変換を参照イメージに適用し、そして、計算マスクを、得られた変換された参照イメージに手供養することによって、代わりに得られる。代わりに、提案された変換の逆数は、計算マスクに適用され、そして、次に、結果として起こる変換された計算マスクは、(オリジナル)の参照イメージに適用される。提案された変換の逆数は、それぞれの要素(すなわち、X、Y、およびθ)の符号を逆にすることによって得られる。どのような場合でも、計算が限定される浮動イメージと、計算が限定された参照イメージとの間の類似性測定は計算される。類似性測定における変化が閾値を下回るまで(または繰り返しの最大の許容数の後に)、同じ操作は繰り返されます。しかしながら、動画のための最終的な変換は、次に、そのように得られた提案された変換の逆数に設定される。この方法は、先の場合と同様に続く。また、上で説明された解決策は、三次元(3D)のイメージに広げることができます。図9に示されるように、この幾何学的な表現と議論を容易にするために、身体部分は、一連のフレーム905a-905c(例えば問題の3つ)からなる(各瞬間の)3Dイメージボリューム905としてみなされるもしれない。そのフレームは、平行な面910a-910cに沿って身体部分を区分する対応する部分を定義する。典型的にこの部分は、各部分は、単一のボクセルの厚さに等しい。登録アルゴリズムは上で説明されたものと同様である。特に、オペレータは参照イメージ上で、3D区切りマスクと3D特徴マスクを定義する。例えば、各マスクは、参照イメージの中心フレーム上に楕円を描き、そして、次にその深さを選択することにより、図形を3Dに拡大することにより決定された、楕円からなる。そのうえ、各動画のための変換は、6つの要素(x軸、y軸、z軸に沿った3つの変換、および、ピッチ、回転、揺動に対する3つの回転)によって定義される。そして、最適化ループは、それぞれのイメージの複数のフレーム上で動作する。このように、動画は、相互情報のグローバルな最適化により提供すれるような、実際の3Dアプローチでもって再編成される。
【0096】
上で説明された解決策は、分析時の身体部分の動きを効率的に補償し、これにより、イメージの調整不良に起因するいかなる人工的な影響をも実質的に排除する。これは、医療画像処理の精度を大幅に改善する。例えば、この発明の解決策は、SN比(SNR)の実質的な増大を提供する。提案された解決策は、(精度と空間分解能の双方での)分析の結果の品質を大幅に増大する。各動画のための計算マスクの流動的な定義は、効率的に境界効果を制御する。それにより、区切りマスク外の情報によって引き起こされた結果のいずれの劣化も回避する。上記の利点が現実的な計算の複雑さで得られることに注意されるべきである。そのことが、実用的な速度による提案された解決策を、最も実用的な速度に適用することを可能にする。上記のすべてが超音波画像診断における、潅流査定の臨床への適用を促進する。
【0097】
上記の利点の図示が図10aから10bに提供される。特に図10aを考察すると、全く登録のない腎臓イメージの模範的シーケンスは、例えば、モノタイプの指数モデル1010aに適合する潅流カーブ1005aを発生させる。理解できるように、潅流カーブ1005aは実質的に、対応するモデル1010aと異なっている。逆に、図10bは、潅流カーブ1005bおよび、上で説明された登録手順を適用した後の同じイメージシーケンスに対するそれぞれのモノタイプの指数モデル1010bを示す。現在の潅流カーブ1005bが対応するモデル1010bによりよく合致していることは明白である。より明確には、潅流カーブ1005bは、図10aの潅流カーブ1005aと比べて、データとモデルとの間で実質的に減少している平均の標準誤差を示す。定量的な測定値は、得ることができる精度の改善が、ほとんどの実用的な状況で20%より高く、そして、典型的には20%より高いことを示す。
【0098】
[変形例]
当然、当該技術に熟達した者は、局所的で特定の要件を満たすために、解決策を上述の多くの変更と変形に適用してもよい。特に、この発明は、それの好ましい実施例に関連して、ある程度詳しく述べてきたが、他の実施例化と同様に、形態および詳細における様々な省略、代替、および変更が可能であることを理解すべきである。この発明の開示されたあらゆる実施例にも関連して述べた特定の要素、および/または、方法ステップが、設計選択の一般的な事項として、他のあらゆる実施例に組み込まれることも明白に意図している。
【0099】
例えば、スキャナが異なった構造を持っているか、または他のユニット(プリンタなど)を含んでいるなら、同様の問題が適用される。同様に、イメージは、異なった解像度で取られるか、または異なった形式で格納されてもよい。
【0100】
代わりに、各マスクは、異なった形(例えば、正方形、楕円またはいずれかの任意の形)であってもよく、またはそれはただ一つの閉曲線から成るかもしれない。どのような場合でも、別の方法(例えばそれらの境界の座標を通時じて)で区切りマスクか特徴マスクのどちらかを定義することは可能である。さらに、自動画像分析アルゴリズムによって両方のマスクを入手する可能性も排除されない。例えば、公知の自動境界検出方法により、区切り、および/または、特徴マスクの輪郭描写を実行することができる。代わりに、特徴マスクは、区切りマスクの固定割合として、描画されることができる(例えば、区切りマスクの内側境界に沿ったマージンにより六定される)。望ましくは、そのような割合は、区切りマスクの領域の50% から 100%の間、より好ましくは、55% から 65%の間の領域を占める。例えば、浸食などの形態学的なイメージプロセッシングオペレータの援助により、前述の輪郭描写を実行することができる。
【0101】
そのうえ、登録プロセスの間、直接に各動画を参照イメージと比べることは厳密には必要でない。例えば、また、各動画を、再編成された隣接の動画と比べることによって、同じ結果が間接的に獲得されてもよい。提案された解決策は、異なったカテゴリの最適化アルゴリズム(例えば選択された目印に基づいて)で実施されることも適切である。
【0102】
登録プロセッサがアーキテクチャを持つなら、同様な考察が適用される。例えば、移動見積り器と登録されたイメージシーケンサを、(各変換を決定し、そして直接対応する動画に適用する)単一のモジュールに、組み込むことは可能である。
【0103】
さらに、異なった技術は、変換を適用するために用いられてもよい。特に、各要素(マスク、イメージ、またはそれの一部など)を変換する動作は、所望される変換に基づき、要素の画素値の実際の変換として上述されてきた。しかしながら、その動作は、(それの起源、および/または、前記起源の周りの回転の変換により)要素の座標系を変換することと同等であることは、容易に明らかであるべきである。この場合、要素の画素値は変換されないが、それらは変換された座標系に関連つけられる。
【0104】
以上の記述では、説明は、特定の最適化アルゴリズムに対して成されたが、これは限定を意図するものではない。例えば、また、(変換の代わりに)類似性測定自体が閾値に達した時、最適化手順を止めることによって、または、いずれかの同等な計算技術(繰り返し作業に全くかかわっていなくても)を適用することにより、同じ結果が獲得されてもよい。
【0105】
そのうえ、(ただ一つに低減された)シーケンス内の動画の部分集合のみに対する提案された解答を適用することを防止しない。
【0106】
どのような場合でも、区切りマスク内で定義されない特徴マスクで実行されるために、この発明の解決策は、それ自体が役に立つ。
【0107】
また、いくつかの特定の状況では、区切りマスクより実質的に小さい特徴マスクを使用するのが好ましい。
【0108】
代わりに、正規化された相互情報は、次式のような異なった公式で定義されてもよい。
NMI(A,B) = 2MI(A,B) / [H(A)+H(B)]
NMI(A,B) = H(A,B)-MI(A,B) または
NMI(A,B) = [H(A)+H(B)] / H(A,B)
【0109】
どのような場合でも、正規化を全く含まない相互情報の使用は除外されない。また、相互情報は、3つの異なったヒストグラムを使用して計算されてもよく、または、相互情報を最大にする変換は、異なったアルゴリズム(パウエルまたはSimplex法など)で決定することができる。しかしながら、また、他の類似性測定(正方形の差の合計など)の使用は、それがはるかにも有利でないとしても、除外されないことに注意されるべきである。
【0110】
空間的なサブサンプリングが別の構造を持つか、または同等なアルゴリズムを実施するなら、同様な考慮が適用される。例えば、サブサンプリング要素は、(サブサンプリング動作の間に補間技術を用いるデシメータによる)断片的な値を持つことができ、または、調整されたデシメータマスクに対応する全体の領域内で計算できる。代わりに、空間分解能セルのサイズは、別の技術(wavelet分析など)で決定される。そのうえ、デシメータは、異なったフィルタで、または限定された参照イメージを全くフィルタ処理でさえもすることなく、実行されることが適する。代わりに、イメージは、(例えば、所定のサブサンプリング要素を用いて)他の評価基準に基づくサブサンプリングされる。どのような場合でも、少しも空間的なサブサンプリングのない発明の方法の実現は、除外されない。
【0111】
この発明の異なる具体化では、最適化器は別の方法で初期化される。例えば、より洗練された実施では、予測された変換は、直線的な予測フィルタに基づいてなど他のアルゴリズムを用いて見積もられる。どのような場合でも、各繰り返しでヌル値への初期化は可能である。
【0112】
代わりに、(少しも見積りプロセスを用いずに)最適化器を、前の動画に対する変換に直接に初期化することは可能である。
【0113】
この発明の他の具体化は、静的に定義された多くの動画のスキップを含む。どのような場合でも、すべての動画のための変換の計算にかかわる実施は熟考される。
【0114】
そのうえ、シーケンスの始めか終わりでの参照イメージの選択は、使用目的によっては実行可能である。
【0115】
また、提案された解決策も、変換を全体の動画(および、区切りマスクによって特定された領域だけには適用されない)に適用することにより、実行されることが適切である。代わりに、区切りマスク外のそれぞれのオリジナルのイメージの部分を、対応する登録されたイメージに追加することを避けること、または、精密でない変換(例えば、アフィン変換かB-スプラインに基づく変換)を使用することは可能である。
【0116】
代わりに、登録プロセスの間、動画のすべての画素を保存することができる。
【0117】
また、さらに、いずれのカット用マスクも用いることなく、この発明の解決策を実行に移すことができる。
【0118】
代わりに、最も明るいイメージと最も暗いイメージは異なった方法(例えばイメージの平均した明るさについて計算しないで)で決定される。どのような場合でも、他の評価基準に従って、低減器が最も激しいイメージと最も激しくないイメージを決定するなら、同じ概念が適用される。使用目的によっては(例えば、造影剤が例えば連続したフローとして管理されるとき)、シーケンスの最初のイメージと最後のイメージにおける画素値の差に従って、または、オペレータにより選択された2つの一般的な画像間の差に基づいて、低減用マスクを決定することは可能である。しかしながら、(いずれの低減用マスクをも用いることなく)全体の登録されたイメージの分析は熟考される。
【0119】
この発明の別の具体化では、それぞれの3Dイメージは、異なったフレーム数によって形成されるか、または対応する部分は別の方法で定義される。そのうえ、異なった形を持っている3Dマスクを使用することは可能である。代わりに、3D実現におけるイメージのシングルフレーム内の計算領域の定義は、排除されない。
【0120】
同様に、フロー定量化モジュールは、別の構造であってもよく、または、等価なユニットを含んでもよい。さらに、異なったパラメータ、(パラメトリックのイメージの値を分類し、そしてグループ化することによって)一般的な潅流値を計算すること、または、いずれのパラメトリックイメージも発生させることなく、潅流を評価することも可能である。しかしながら、他の医療画像処理アプリケーション(例えば、いずれの造影剤をも管理することのない簡単な超音波検査法)で提案された解決策の開発が熟考される。
【0121】
また、同じ概念を、他の技術、例えば、エックス線のコンピュータ断層法(CT)、磁気共鳴映像法(MRI)またはポジトロン断層法(PET)に基づくスキャナに適用することができる。
【0122】
(この発明を実施するのに使用されるかもしれない)プログラムが異なった方法で構造化されるか、または増設されたモジュールまたは機能が備えられるなら、同様な考察が適用される。そのうえ、提案された解決策は、同等な方法(例えば同様な、または、追加的なステップでもって)で実施されるために、その解決策自体が提供される。どのような場合でも、そのプログラムは、外部の、または、内包のソフトウェア、ファームウェア、またはマイクロコード(オブジェクトコードかソースコードの)などのような、いずれかのデータ処理システムにより、またはそれに関連して使用されるために、いずれの形態を採用してもよい。そのうえ、そのプログラムは、いずれのコンピュータ利用可能な媒体上に備えられてもよく、その媒体は、プログラムを含むか、保存するか、通信するか、伝播するか、または移動するのに適したいずれの要素であってもよい。そのような媒体に関する例は、(プログラムをプレロードできる)固定ディスク、取り外し可能なディスク、テープ、カード、ワイヤ、ファイバー、無線接続、ネットワーク、放送波などであり、例えば、その媒体は、電子、磁気、光学、赤外線、または半導体のタイプであってもよい。
【0123】
どのような場合でも、この発明に従った解決策は、ハードウェア構造で(例えば、集積化された半導体材料のチップ)、またはソフトウェアとハードウェアの組み合わせによって実施されるために、それ自体が提供される。
【0124】
代わりに、画像診断システムは、スキャナおよび異なったコンピュータ(または、いずれかの同等なイメージ登録装置)から成る。この場合、記録されたデータは、それの処理のために、スキャナからコンピュータへ(例えばフロッピーディスク、メモリペン、またはネットワーク接続によって)転送される。
【図面の簡単な説明】
【0125】
【図1】この発明の具体化に基づく解決策が適用される画像診断システムを示す図
【図2a】この発明の具体化に基づく解決策を実行するのに使用することができるメインのソフトウェア要素を示す図
【図2b】この発明の具体化にてイメージを再編成するのに使用される区切りマスクと特徴マスクに関する例を示す図
【図3】この発明の具体化に基づく、登録プロセッサの概略ブロック図
【図4a】この発明の具体化に基づく空間的なサブサンプラーの構造を示す図
【図4b】この発明の具体化における空間的なサブサンプラーによって使用される異なった情報を示す図
【図4c】この発明の具体化における空間的なサブサンプラーによって使用される異なった情報を示す図
【図4d】この発明の具体化における空間的なサブサンプラーによって使用される異なった情報を示す図
【図5a】この発明の具体化における移動見積り器の構造を示す図
【図5b】この発明の具体化における移動見積り器によって使用された異なった情報を示した図
【図5c】この発明の具体化における移動見積り器によって使用された異なった情報を示した図
【図5d】この発明の具体化における移動見積り器によって使用された異なった情報を示した図
【図6a】この発明の具体化に基づく登録イメージシーケンサの構造を示す図
【図6b】この発明の具体化における登録イメージシーケンサにより使用された異なった情報を示した図
【図6c】この発明の具体化における登録イメージシーケンサにより使用された異なった情報を示した図
【図6d】この発明の具体化における登録イメージシーケンサにより使用された異なった情報を示した図
【図6e】この発明の具体化における登録イメージシーケンサにより使用された異なった情報を示した図
【図7】この発明の具体化に基づくフロー定量化モジュールの構造を示す図
【図8a】この発明の具体化に基づく解決策の実施を示したフローチャート
【図8b】この発明の具体化に基づく解決策の実施を示したフローチャート
【図8c】この発明の具体化に基づく解決策の実施を示したフローチャート
【図9】この発明の具体化に基づく解決策の三次元への適用を示した図
【図10a】イメージの登録なしと、この発明の具体化に基づく登録ありとの潅流カーブを示す図
【図10b】イメージの登録なしと、この発明の具体化に基づく登録ありとの潅流カーブを示す図
【符号の説明】
【0126】
100:画像診断システム
105:中央ユニット
110:アレープローブ
125:マザーボード
130:ドーター・ボード
135:ドライバ
145:モニター
205:格納器
210:登録モジュール
220:セレクタ
230:モニタデバイス
235:登録プロセッサ
310:移動見積り器
315:登録イメージシーケンサ
405:調整器
415:乗算オペレータ
425:空間周波数分析器
505:イメージセレクタ
510:最適化ループ
【技術分野】
【0001】
この発明は医療画像処理分野に関する。 より特別には、この発明は医療画像処理で使用のためのイメージ登録の技術に関する。
【背景技術】
【0002】
医療画像処理は医療のアプリケーションのための機器の分野で安定した技術である。特に、この技術は血液潅流の査定のために広く開発されており、それは、いくつかの診断アプリケーションと特に超音波分析で使用が見られる。このために、超音波造影剤(UCA)は、液体キャリア中の気泡の懸濁の形態で典型的に患者に施される。その造影剤は効率的な超音波反射鏡として作用し、その結果、超音波を適用することにより、エコー信号を容易に検出して記録することができる。造影剤が患者の血液と同じ速度で流れるので、それの追跡は、分析されるべき身体部分の血液の潅流に関する情報を提供する。
【0003】
気泡は、乳化剤、油、シックナー、砂糖を使用するか、または、ガスまたはそれの前兆を、さまざまなシステムへ載せるか、カプセル化することにより、典型的に安定化される。一般に、安定した気泡は「ガス充填のマイクロ小液胞」と呼ばれる。ガス充填のマイクロ小液胞は、水の媒体内で分散された気泡を含み、そして、表面活性剤(すなわち、amphiphilicの材料)を含む極めて薄い表面により、ガス/液体の界面でバウンドする。これらのマイクロ小液胞(「微小気泡」としても知られている)は、粉末化されたamphiphilicの材料、例えば、凍結乾燥された前形成のリポソーム、凍結乾燥されるか、スプレー乾燥されたリン脂質溶液を、空気または他のガスに接触させ、次に水のキャリアに接触させ、そして、微小気泡懸濁液を発生させるために、攪拌することにより、準備される。
【0004】
代わりに、マイクロ小液胞は、気泡が自然のまたは合成の重合体で形成された固形材料の覆い(この場合、それらは「マイクロ球」か「マイクロカプセル」としても知られている)によって囲まれる懸濁液を含む。別の種類の超音波造影剤は、重合体か他の固体の多孔性のマイクロ粒子の懸濁液を含み、その懸濁液は、マイクロ粒子の小孔内に捕捉された気泡を運ぶ。
【0005】
マイクロ小液胞、特にマイクロ小気泡とマイクロ球の適した水の懸濁液の例、およびそれの準備は、例えば、EP-A-0458745, WO-A-91/15244, EP-A-0554213, WO-A-94/09829 および WO-A-95/16467に説明されている。
【0006】
潅流評価処理では、通常、マイクロ小液胞は、十分なエネルギーの超音波パルス(「高い機械的なインデックス」と呼ばれる)により破壊される。分析中の身体部分のマイクロ小気泡の補給率の観測は、それの生理的な状態に関する情報を提供する。この技術は初めて、Wei, K., Jayaweera, A. R., Firoozan, S., Linka, A., Skyba, D. M., および Kaul, S., による「"Quantification of Myocardial Blood Flow With Ultrasound-Induced Destruction of Microbubbles Administered as a Constant Venous Infusion," 循環」(1998年、97巻)で提案された。
【0007】
このために、造影剤の流れは、マイクロ小液胞の破壊後、身体部分を表す連続的なイメージのシーケンスを取得することによってモニターされる。そして、そのイメージのそれぞれの基本的な領域の強度における変化を表すタイム・カーブを得るために、そのイメージは分析される。これらの潅流カーブは、潅流の過程の量的なパラメータを抜粋するために、数学的モデルに適する。上記のプロセス(パラメトリック潅流分析としても知られている)に関する例は例えば、 WO-A-02/102251および以下の刊行物で述べられている。
K. Weiによる「 Detection and Quantification of Coronary Stenosis Severity With Myocardial Contrast Echocardiography, Progress in Cardiovascular Diseases」(44(2), 2001, 81-100)、
Kevin Wei, Elizabeth Le, Jian-Ping Bin, Matthew Coggins, Jerrel Thorpe, Sanjiv Kaul、J. Am Col1 Cardiolによる「Quantification of Renal Blood Flow With Contrast-Enhanced Ultrasound 」(2001;37:1135-40)、
Kharchakdjian, R., Burns, P. N., および Henkelman, M.による「 Fractal Modeling of Microbubble Destruction-Reperfusion in Unresolved Vessels」(IEEE Ultrasonics Symposium, 2001)、
Rim, S.-J., Leong-Poi, H., Lindner, J.R, Couture, D., Ellegala, D., Masson, H. Durieux, M, Kasse, N.F. および Kaul S.による「 Quantification of Cerebral Perfusion with Real-Time Contrast-Enhanced Ultrasound, Circulation」(104巻, 2001, 2582-2587)
Schlosser その他による「 Feasibility of the Flash-Replenishment Concept in Renal Tissue: Which Parameters Affect the Assessment of the Contrast Replenishment?, Ultrasound in Med. & Biol」( 27巻, 937-944頁, 2001)、および
Murthy TH, Li P, Locvicchio E, Baisch C, Dairywala I, Armstrong WF, Vannan M による「 Real-Time Myocardial Blood Flow Imaging in Normal Human Beings with the use of Myocardial Contrast Echocardiography」( J Am Soc Echocardiogr, 2001, 14(7):698-705)。
【0008】
しかしながら、潅流評価の精度は、イメージの不可避の調整不良から生じる雑音によって大きく影響する。例えば、これは、患者の動き、その人の呼吸サイクル、または、測定プローブの不用意な移動による。これは、潅流評価の結果の精度を大きく低下させる。問題は潅流の過程のパラメトリックなイメージ処理で特に問題となる。実際にその技術は、それらの位置合わせの失敗により起きるあらゆるエラーは、対応する定量的なパラメータの計算を大きく損なうので、イメージの正確な位置合わせを要求する。上記のすべてが上で説明した技術の臨床応用を妨げる。
【0009】
この問題を解決するために、分析される前にイメージを再度の位置合わせをしなければならない。このために、シーケンスのイメージが参照として選定され、そして、他のイメージ(動画と呼ばれる)は参照イメージに関して再位置合わせされる。このように、分析されるべきである身体部分の表示は、実質的に静止していたままで残る。
【0010】
通常、再位置合わせはオペレータによって手動で実行される。 しかしながら、この解決策は非常に手間がかかり、そのうえ、得られる精度はオペレータの技能に大きく依存する。したがって、手動の再位置合わせは、ほとんどの適用で可能ではない。
【0011】
また、自動的にイメージを再位置合わせするための何らかの解決策は、最近の数年で提案されてきた。これらの解決策は、各動画を参照イメージに写像する最適の幾何学的な変換を決定するのを目的とするイメージ登録の技術に基づく。
【0012】
例えば、US-A-6490560は、コンピュータ断層エックス線撮影(CT)スキャナを使用して、組織潅流を計算するための登録方法を開示する。そのドキュメントは、三次元の量を再編成するために、二次元イメージ上で動作する方法を開示する。この場合、各量は分析で身体部分を区分する(二次元)イメージ部分のシーケンスによって表される。提案された方法では、中央の部分は各シーケンスで選択される。二次元における動きは、参照の中央の部分に関して、それぞれの中央の部分が決定される。そして、対応する移動に従って、それぞれの量が修正される。代わりに、各部分のために個別に同じプロセスを繰り返すことができる。その移動は、一定の形と強度(頭蓋骨の一部などの)を持っている選択された目印により決定される。選択的に、その分析は、処理時間を短縮するために関心のあるサブ領域に制限される場合がある。
【0013】
そのうえ、US-A-5568811は、超音波分析において組織の境界をローカライズする方法に関する。この内容では、そのドキュメントは、2つの異なったイメージの間で小さいデータ立方体を相関することにより、移動を補償する可能性を示唆している。
【発明の開示】
【発明が解決しようとする課題】
【0014】
しかしながら、この分野で公知のいずれの解決策も完全に満足できるものではない。事実、利用可能な登録方法は、最も実用的な状況において、比較的貧しい結果しか提供しない。特に、提案された解決策は、潅流処理のパラメトリックなイメージ処理に対して適切なレベルの精度を確定しない。その上、超音波映像での小斑点粒の存在は、実際に潅流評価に関する情報を隠す。これは処理の精度をさらに低下させるエラーを導入するかもしれない。
【課題を解決するための手段】
【0015】
この発明によると、イメージを再編成するために複数のマスクの使用が示唆される。
【0016】
特に、この発明の態様は、医療画像処理における使用のためのイメージ登録方法を提案する。その方法は、イメージのシーケンスを提供するステップから始まり、各イメージは分析下の身体部分のディジタル表示を含む。参照イメージはシーケンス(動画を定義するシーケンスの残りのイメージがある)の中で選択される。そして、動画(または、それの少なくとも一部)は参照イメージに関して再編成される。再編成のステップは以下の操作を含む。最初に、区切りマスク(動画が再編成されなければならない参照イメージの領域を特定する)、および、特徴マスク(再整列が計算される参照イメージのさらなる領域を特定する)が定義される。参照イメージに関する動画の変位を補償するための最適化された変換は、その後、決定される。この操作は、類似性の測定を最適化することによって、実行され、その測定は3つの代替の方法で計算されてもよい。第1の実施では、類似性の測定は、第1の計算領域(計算マスクにより、参照イメージ上で特定される)と、第2の計算領域(その領域は、提案された変換に基づき変換された動画上の計算マスクによって特定される)との間で計算される。その計算マスクは、提案された変換に基づき変換された区切りマスクと特徴マスクとの間の交差部により決定される。第2の実施では、類似性の測定は、第1の計算領域(その領域は、提案された変換に基づき変換された参照イメージで計算マスクによって特定される)と、第2の計算領域(その領域は、動画の計算マスクによって特定される)との間で計算される。その計算マスクは、提案された変換に基づき変換された特徴マスクと、区切りマスクの間の交差部により決定される。第3の実施では、類似性の測定は、第1の計算領域(その領域は、提案された変換の反比例に基づき変換された計算マスクにより、参照イメージ上で特定される)と、第2目の計算領域(動画の計算マスクによって特定される)との間で計算される。その計算マスクは再び、提案された変換に基づき変換された特徴マスクと、区切りマスクの間の交差部により決定される。そして、最適化された変換に基づき、動画、またはその関連部分が変換される。
【0017】
特に、この結果は、第1の実施における最適化された変更自身を、または、第2および第3の実施における最適化された変換の反比例を適用することによって、獲得される。
【0018】
この発明の実施例では、各動画に対する最適化された変更は、反復のプロセスを通じて決定され、そのプロセスは、類似性測定(または、それの変換)が閾値に達するまで、1回以上のループの実行を伴なう。
【0019】
通常、同じ操作は、各々のさらなる動画のシーケンスに対して繰り返される。
【0020】
この発明の特定の実施例では、特徴マスクは区切りマスク内で定義される。
【0021】
都合上、特徴マスクは区切りマスクの50%より大きい。
【0022】
さらなる強化として、互いの情報測定(例えば、2つの計算領域の間の標準化された相互の情報から成る)が利用される。
【0023】
この好ましい実施例は、イメージの処理前に、そのイメージをサブサンプリングすることを備える。この操作はサブサンプリングファクタに基づき、そのファクタは、空間分解能に基づき、参照イメージ(差別することができる最小の意義ある要素を特定)の各次元に沿って計算される。
【0024】
さらなる強化として、空間分解能は、特徴マスクから得られる参照イメージの長方形の領域内で見積もられる。その方法の性能を向上させる方法は、1つ以上の以前の動画のために最適化された変換に基づき、各動画のための提案された変換を初期化することである。
【0025】
望ましくは、その初期化は、以前の多くの動画のために最適化された変換に基づく予測のアルゴリズムによって実行される。
【0026】
さらなる改良として、いくつかの動画(その個数は、現在の動画のための最適化された変換の勾配に基づき決定される)は、最適化手順の間、スキップされてもよい。スキップされた動画の各々に対する最適化された変換はその後、補間により得られる。
【0027】
この発明の都合のよい実施例では、参照イメージは、2つのサブのシーケンスに仕切るため、イメージのシーケンスの境界(すなわち、1番目と最後のもの)と異なる。
【0028】
(提案され、最適化された)変更のための提案された選択は、固定の変換から成り、その固定の変換は、対応する変換(つまり、一つ以上の変換化および/または一つ以上の回転)により決定される。
【0029】
さらなる改良として、最適化された変換を適用する前または後に、区切りマスクの外にあるそれぞれの動画のいずれの視覚化のイメージ要素も廃棄される。
【0030】
この発明の好ましい実施では、イメージは、そのイメージの少なくとも1つにおいて捨てられた視覚化要素を捨てることによって、そのようにして得られた低減イメージは、その後分析のために使用される。
【0031】
(潅流査定などの)特定のアプリケーションでは、さらなる視覚化要素は各イメージにおいて捨てられる。このために、その方法は、シーケンス内で最も強いイメージとで最も強くないイメージを(例えばそれらの平均した明るさに基づき)特定する。捨てられるべきである視覚化要素は、最も強いイメージと最も強くないイメージでの対応する視覚化要素の差が閾値より低いものから成る。
【0032】
可能な拡大として、各イメージは、(対応する身体部分を示す)多くのフレームを含む。この場合、区切りマスクと特徴マスクは2個以上のフレーム上で定義される。通常、この発明の方法は、超音波画像診断アプリケーションで適用される。
【0033】
一般性からそれることなく、提案された方法は、潅流査定における使用のために明確に設計される。
【0034】
この発明のさらなる態様は、上で説明された方法を実行するためのコンピュータプログラムを提案する。
【0035】
この発明のさらなる態様は、そのプログラムを具体化する製品を提案する。
【0036】
この発明の異なる態様は、対応するイメージ登録装置を提供する。
【0037】
さらにこの発明のもう一つの態様は登録装置を含む画像診断システムを提案する。
【0038】
この発明の特徴づける特徴は、添付されたクレームで詳しく説明される。この発明自体、しかしながら、それのさらなる特徴および利点と同様に、単に限定するものでない以下の詳述な説明を、添付した図面に関連して読むことにより、最良に理解されるであろう。
【発明を実施するための最良の形態】
【0039】
特に図1を参照すると、画像診断システム100が図示されている。そのシステム100は、形態の送受信機の(リニアまたはマトリックス)アレープローブ110を持つ中央ユニット105を持つ超音波スキャナからなる。そのプローブ110は、超音波波を送信(例えば、2から10MHzの間の中心周波数)を送信し、そして、組織構造および/または、造影剤(分析されるべき身体部分120の患者115の皮膚に接触するとき)により超音波の反射から生じるエコー信号を受信する。プローブ110は、上記のパルスエコーモードでプローブ110の使用を可能にする送信/受信マルチプレクサを備える。
【0040】
中央のユニット105は、マザーボード125を収納し、その上には、スキャナ100の動作を制御する電子回路(マイクロプロセッサや、ワーキングメモリやハード・ディスク・ドライブなどの)が装着される。そのうえ、1つ以上のドーター・ボード(その全体を130で示す)がマザーボード125上に差し込まれる。そのドーター・ボード130は、プローブ110を駆動するための電子回路を提供する。典型的に、それらの電子回路は、超音波波を発生させるためのビーム形成器およびパルス発生器、時間利得補正(TGC)回路を備えるプリアンプ、エコー信号を処理するためのAD変換器(ADC)、3D構成器、およびイメージとしてエコー信号を表すためのスキャン・コンバータを含む。
【0041】
また、スキャナ100は、取り外し可能なデータサポートメディア140(CD-ROMなどの)を読み取るためのドライバ135を備えることができる。モニター145は、分析下で身体部分120を表すイメージを表示するために使用される。 そのうえ、キーボード150は、従来の方法で中央ユニット105に接続される。そのキーボード150は、モニター145のスクリーン上のポインタ(図では示さず)の位置を操作するために使用されるトラックボール155を備える。
【0042】
図2aに移行すると、この発明の実施例に基づく解決策を実施するのに使用することができるメインのソフトウェアコンポーネントが、参照番号200で全体が示される。その情報(プログラムとデータ)は、ハードディスクに通常保存されて、そして、プログラムが実行しているとき、少なくとも部分的に、ワーキングメモリにロードされ、同時に、オペレーティングシステムと他のアプリケーション・プログラム(図では示さず)もロードされる。そのプログラムは最初に、1枚以上のCD-ROMからハードディスクにインストールされる。以下の図面では、いずれのマトリクスも実線の矢印で示され、他方、対応するビデオ描写は、オープンの矢印で示される。そのうえ、一時的な一連の一般的な対象物からなるいずれのシーケンスも太字の矢印で示され、組みの値からなるベクトルは点線の矢印で示される。
【0043】
特に、格納器 205は、例えば前述したスキャナにより説明されたスキャナで)イメージIのシーケンスを格納するのに使用される。このために、分析中の身体の部分は望ましくは、以前に言及されていたように、造影剤の超音波を受ける。造影剤は、注入によるなどのように、連続した流れ、または、かたまりとして管理することができる。望ましくは、分析中の身体部分は潅流のプロセスを受ける。特に、造影剤(ガス充填のマイクロ気泡から成る)が分析されるために身体部分に達する予定された期間(例えば、数秒)の後に、高エネルギー超音波パルスが適用される。そのエネルギーは、マイクロ気泡の破壊後、かつ、安定した潅流状態(連続した流れの場合)か潅流の最大値(かたまりの管理の場合)が達した時、正確に測定された値の間に受信されたエコー信号のかなりの変化の検出を許可するために、マイクロ気泡の多くの部分(例えば、少なくとも50%)の破壊を引き起こすために十分でなければならない。身体部分へ造影剤の流れを(例えば30-80 msの解像度で)追跡するために、次に、身体部分の連続したイメージのシーケンスが取られる。
【0044】
各イメージは身体部分のディジタル描写から成る。そのイメージは、多数の視覚化要素、通常マトリクス(例えばのM=512列とN=512行)の形態で定義される。それぞれの視覚化要素は、画素(ピクセル)やボリューム要素(ボクセル)のように、イメージの基本的な領域を示す。通常、視覚化要素は、画素(または、ボクセル)に割り当てられたエコー強度を示す白の0から黒の255の値(例えば8ビットの場合)から成る。また、通常、そのイメージは、デジタルフィルタ(例えば、バンドパスフィルタ)と他の信号コンディショナ(例えば、ポストビームの形成TGC)を通して処理される。更にそのイメージは、復調器(エコーのエンベロープの振幅を計数するために)と非線形のコンディショナー(対数圧縮器など)を通してさらに処理される。望ましくは、各イメージIのシーケンスは、対応するファイルによって、イメージ格納205内でコード化される。そのファイルは、それぞれのイメージに関する行(M)と列(N)の数、およびイメージのシーケンスの数を保存する。 そのファイルは次に、イメージ(各々の一つが対応するピクセル値のためのMxNバイトから成る)を表す記録のストリームを含む。
【0045】
イメージのシーケンスIは、登録モジュール210に入力される。その登録モジュール210は、分析で身体部分の対応する動きを補償するために、イメージを再編成する。登録モジュール210は、イメージIのシーケンスを、格納器205に格納された対応するファイルからロードし(そしてデコード)するために、グラフィカルユーザインタフェイス(GUI)215を含む。特にイメージIのシーケンスは、セレクタ220に提供される。そのセレクタ220は、オペレータに、イメージを表示させ、そしてそれらのイメージの一つを参照イメージとして選択することを許可する。他のイメージのシーケンス(動画として呼ばれる)は、参照イメージに対し、(登録プロセスを通じて)再編されるべきである。参照イメージIrは、イメージのシーケンスの境界(つまり、最初の一つと最後の一つ)と異なり、そのシーケンスを、参照イメージIrから第1のイメージまでのサブシーケンスに仕切り、および、参照イメージIrから最後のイメージまでのサブシーケンスに仕切る。そして、最も実際的な実用化では、参照イメージIrは、登録プロセスを容易にするために、より貴重な情報を含む。
【0046】
参照イメージIrは、描画モジュール225によりアクセスされ、その描画モジュール225は、そこで、区切りマスクMdと特徴マスクMfを決定するために使用される。区切りマスクMdは、分析プロセス(それによって動画が再編成される)のために、関心のある領域(ROI)を特定する。区切りマスクMdの定義は、補償されるべき動きに起因する全体の移動を考慮に入れることであり、その、区切りマスクMdはまた、オペレータに、テキストおよび他の要求されない情報(もしあるならば)を含むイメージの領域を捨てさせることを許可する。このことは、いずれのシステム(提供されるイメージの形式の如何にかかわらず)においても提案された解決策の適用を可能にする。他方、特徴マスクMfは、再整列について計算するのに使用される領域を(身体の部分の形態学的な特徴に基づいて)特定する。対応する領域が、分析の身体部分の関連解剖学的な一部分の表示を含むように、特徴マスクMfの描画は、通常、オペレータに関する解剖学的な知識から有利になる。望ましくは、特徴マスクMfは、区切りマスクMd内に描かれる。そのうえ、最も実際的な実用化では、特徴マスクMfは、参照イメージIrのかなりの部分を区切る。例えば、特徴マスクMfは、区切りマスクMdの50%より大きい。好ましくは、特徴マスクのサイズは、区切りマスクMdのサイズの50%-80% (更に望ましくは、55%-65%) である。この値は、高精度と短い計算時間の相対する要件の間で、良好な妥協を提供する。通常、各マスクMd,Mfは、MxNビットのマトリクスで表される。典型的に、マスク内のビットは、論理値1が割り当てられ、一方、マスク外のビットは論理値0が割り当てられる。参照イメージIr上で描画される区切りマスクMdと特徴マスクMfに関する例は図2bで示される。
【0047】
図2aを参照すると、この目的のためにイメージシーケンスIの、区切りマスクMdの、および、特徴マスクMfのビデオ表示がモニタデバイス230により表示される。また、イメージのシーケンスI、参照イメージIr、区切りマスクMd、および特徴マスクMfは、登録プロセッサ235に供給される。登録プロセッサ235は、参照イメージIrに関してそれぞれの動画の動きを補償して、登録イメージRIの対応するシーケンスを得る。登録イメージRIのシーケンスは、格納器205に格納され、そして、次に、それはモニタードライブ230により、表示するために利用できる。
【0048】
登録されたイメージシーケンスRIも、フロー定量化モジュール240に供給される。そのモジュールは、潅流の定量化パラメータについて計算するために使用される。また、フロー定量化モジュール240は、登録プロセッサ235から空間分解能セルCrおよびカットマスクMtの定義を受け取る。登録プロセッサ235の意義は以下で明白となる。フロー定量化モジュール240は、パラメトリックイメージPIを出力し、そのパラメトリックイメージPIは、潅流のプロセスの結果のグラフ表示を与える。そのパラメトリックイメージPIは、対応する格納器245に格納され、そして、次に、それはモニタードライブ230を通じて表示のために利用可能である。
【0049】
図3に移行すると、登録プロセッサ235は、カスケード接続された空間サブサンプラー305、移動見積り器310、および登録イメージシーケンサ315から成る。
【0050】
特に、空間サブサンプラー305は、処理されるべき情報量を減少させるために使用される。その空間サブサンプラー305は、特徴マスクMf、区切りマスクMd、参照イメージIr、およびイメージIのシーケンスを受け取る。その空間サブサンプラー305は従って、サブサンプリングされた特徴マスクSMf、サブサンプリングされた区切りマスク SMd、サブサンプリングされた参照イメージSIrおよび サブサンプリングされたイメージSIのシーケンスを出力する。
【0051】
移動見積り器310は、それぞれのイメージの移動を補償する変換を決定するのに使用される。このために、移動見積り器310は、サブサンプリングされた特徴マスクSMf、サブサンプリングされた区切りマスク SMd、サブサンプリングされた参照イメージSIrおよび サブサンプリングされたイメージSIのシーケンスを(空間サブサンプラー305から)受け取る。望ましくは、その変換は、厳密なタイプ(すなわち、すべての距離を保持する変換)である。問題の例では、その変換は、横軸(X)に沿った変換、軸(Y)に沿った変換、および回転角(θ)に沿った変換を指定する3つの要素により定義される。提案された選択は、許容できる計算の複雑さでもって良い結果を提供する。その結果、移動見積り器310は、対応する変換Tのシーケンスを発生させ、それは登録イメージシーケンサ315に供給される。
【0052】
また、登録イメージシーケンサ315は、区切りマスクMdとイメージIのシーケンスを受け取る。登録イメージシーケンサ315は、変換Tのシーケンスに基づき、イメージIのシーケンスをアップデートして、登録イメージRIの対応するシーケンスを発生する。さらに、登録イメージシーケンサ315は、カットマスクMtを決定し、それはフロー定量化モジュールMtに提供される。
【0053】
次に図4aを参照すると、空間サブサンプラー305の構造が詳細に例証される。特に、特徴マスクMfは、調整器405に供給され、その調整器405は、対応する調整された特徴マスクRMfを決定する。調整された特徴マスクRMfは、特徴マスクMfを含む最小の長方形から成る。同様に、区切りマスクMdは、別の調整器410に供給される。その調整器410は、対応する調整された区切りマスクRMd(これは区切りマスクMdを含む最小の長方形から成る)を決定する。調整された特徴マスクRMfは、乗算オペレータ415を通して、参照イメージIrに乗算される。より詳細には、調整された特徴マスクRMfの対応する論理値が、参照イメージIrの各ピクセル値に乗算される。その結果、調整された特徴マスクMf内の画素値は、変化されずに残り、他方、(次の処理の間に捨てられるように)他の画素値は0にリセットされる。この操作は、対応する限定参照イメージLIrを生成する。同様に、有限なイメージLIのシーケンスは、別の乗算オペレータ420を通じて、調整された区切りマスクRMdを、イメージIのシーケンスに乗算することによって発生される。
【0054】
限定参照イメージLIrは空間周波数分析器425に入力され、空間解像度セルCrのサイズが計算される。そのセルCrは、それの各サイズに沿って限定参照イメージLIrの空間分解能を定義する。その空間分解能は、識別できる重要度が最小の要素を特定し、特に、超音波画像診断の場合、イメージ内で通常目に見える小斑点粒から成る重要な要素を特定する。
【0055】
この目的のために、空間周波数分析器425は、限定参照イメージLIrから見積り領域Reをサンプリングする。見積り領域Reは、調整された特徴マスクRMfによって定義された長方形の領域の各寸法内に、(左上隅から始めて)2ピクセル数の最大パワーを含む。特徴マスクMf、調整された特徴マスクRMf、および対応する見積り領域Reのイラストは図4bで示される。例えば、調整された特徴マスクRMfに115×140画素のサイズがあるなら、見積り領域Reは 64×128=26×27の画素から成る。
【0056】
図4aに戻ると、空間周波数分析器425は、各寸法に沿って見積り領域Reの平均パワースペクトル密度を決定する。望ましくは、このプロセスは、見積り領域Reのそれぞれの列と行について、離散的なフーリエ変換(高速フーリエ変換、またはFFTなどの)を適用することにより、実行され、次に、各寸法に対して得られるように、その結果が平均される。通常、空間周波数は「ピクセル数の逆数」の単位で表される。他方、平均パワースペクトル密度は、0と100の間で正規化され、DC要素の影響を取り除くためにDC要素に割り当てられる0の値を持つ。見積り領域Reの長方形の形は、いずれの境界効果(これは、特徴マスクMfの可能な異形によって導入される)も回避し、そのうえ、2のパワーとしての見積り領域Reのサイズの選択は、(FFTはDanielson-Lanczos 補助定理によって計算できるので)処理速度を上げることに注意されるべきである。横軸(Dx)とY軸(Dy)に沿った平均パワースペクトル密度の分布が図4cで示される。
【0057】
図4dを考察すると、累積しているスペクトルエネルギーの対応する分布Ex,Ey を入手するために、密度分布Dx、Dyは、空間周波数に関して統合される。実質的にエネルギーを保持するしきい値Thは、分布Ex,Eyに適用される。望ましくは、そのしきい値は、80%から99.9%、より望ましくは85%から99.5%、更により望ましくは、90%から99%の間からなり、例えば98%である。分布Ex and Ey内のしきい値Thでエネルギーを提供する空間周波数(それぞれfx および fyで示される)は、次に決定される。(ピクセル数における、サブサンプリングの期間を定義する)サブサンプリング要素PxとPyは、それぞれ整数に丸められた2・fx および 2・fyの逆数により与えられる。図中の示した例では、しきい値Thでエネルギーを与える空間周波数fxおよびfyは、それぞれ0.1および0.2に等しい。したがって、サブサンプリング要素PxとPyは以下の通りになるであろう。
【数1】
【0058】
図4aに戻り、空間的なサブサンプラー305は、(並列動作する)4つのデシメータのバンク430を含む。各デシメータ430は、空間的解像度セルCrを受け取り、それは、フロー定量化モジュールに送信される。特徴マスクMf、区切りマスクMd、限定参照イメージLIr、および限定イメージLIのシーケンスはそれぞれのデシメータ430に提供され、それは、対応するサブサンプリングされた特徴マスクSMf、サブサンプリングされた区切りマスクSMd、サブサンプリングされた参照イメージSIr、およびサブサンプリングされたイメージSIのシーケンスを出力する。各デシメータ430は、解像度セルCrに基づき、それぞれの入力マトリックスを減じる。これは、実質的に、情報内容(器官解剖学か形態学)に影響することなく、処理されるためのデータ量を大きく低減する。このために、そのデシメータ430は最初に、ローパスフィルタ処理を入力マトリックスに適用する。望ましくは、このプロセスはリニアフィルタによって実行される。より詳細には、入力マトリックスは、Px列とPy行を持つカーネルで包囲される。カーネルの各セルは、1/( Px・Py)の値が割り当てられる。その結果、入力マトリックスの各画素は、画素上の中心に位置する入力マトリックスの対応する部分により、カーネルの生成物の平均値で取り替えられる。このように、入力マトリックスの内容は、(それぞれ横軸とY軸に沿った)サブサンプリング要素Px および Pyに依存するカッオフ周波数を持つローパスフィルタである。したがって、(次のサブサンプリング作業で誤りを導入する)いかなるノイズピークもこの入力マトリックスから除去される。(フィルタ処理される)入力マトリックスは低速度で再度サンプリングされる。言い換えれば、デシメータ430は、X軸に沿ってすべての画素Pxを、およびY軸に沿ってすべての画素Pyを再度サンプリングする。上で説明された操作は、Px・Pyに比例する要素により、各入力マトリックスのサイズの低減を可能にする。
【0059】
図5aを参照すると、移動見積器310の構造が詳細に例証される。特に、サブサンプリングされたイメージSIのシーケンスはイメージセレクタ505に提供される。セレクタ505は、番号を決定する選択パラメータNsに基づいて、シーケンスからイメージSIをサンプリングする。選択されたサブサンプリングされたイメージSIは、最適化ループ510に供給される。それは、サブサンプリングされた参照イメージSIrに関して選択されたサブサンプリングされたイメージSIの整列を示す類似性測定を最大にする変換を計算する。以下で説明されるように、この最適化ループ510は、選択されたイメージの領域で動作する。この領域は、特徴マスクによって特定された参照イメージの部分に対応する領域を表す。その特徴マスクは、関連した変換を適用した後、区切りマスク内に留まる。望ましくは、その最適化ループ510は、画素ベースのアルゴリズムを実行し、そのアルゴリズムは、(解決策の強固さを増加させるように)上記の領域の全体の内容で動作する。
【0060】
より明確には、選択されたサブサンプリングされたイメージSIは、幾何学的変換器515に入力される。また、その幾何学的変換器515は、サブサンプリングされた区切りマスクSMdおよび提案された変換Tp(以下で説明されるように発生される)を受け取る。幾何学的変換器515は、選択されたサブサンプリングされたイメージSIとサブサンプリングされた区切りマスクSMdを、提案された変換Tpに基づいて変え、対応する変換されたイメージTIおよび変換された区切りマスクTMを得る(図5bを参照)。このために、望ましくは、幾何学的変換器515は、(例えば最も近いアルゴリズムに基づき)サブの画素解像度を与える補間器が備えられる。
【0061】
変換された区切りマスクTMdは、次に、乗算オペレータ520を通してサブサンプリングされる特徴マスクSMfに適用される。乗算オペレータ520の動作は、計算マスクMcを発生する。その計算マスクMcは、サブサンプリングされた特徴マスクSMfと、変換された区切りマスクTMdとの交差部に対応する(図5cを参照)。従って、(提案された変換Tpに対応する)変換された区切りマスクTMdの置換で、サブサンプリングされた特徴マスクSMfに、変換された区切りマスクTMdを生じさせた時、計算マスクMcは、変換された区切りマスクTMd内のサブサンプリングされた特徴マスクSMfの一部から成るであろう。
【0062】
次に、(乗数オペレータ525により)計算マスクMcを、変換されたイメージTIsに乗算することにより、計算で限定された浮動イメージCIfが発生される。同様に(別の乗数オペレータ530により)同じ計算マスクMcを、サブサンプリングされたイメージSIrに乗算することにより、計算で限定された参照イメージCIrが発生される。計算で限定された浮動イメージCIfと計算で限定された参照イメージCIrは、類似性計算機535に入力される。その計算機535は、計算で限定された参照イメージCIrに関し、計算で限定された浮動イメージCIfの整列を示す類似性測定Vを提供する。結果として、類似性測定Vsの計算は、計算マスクMcによって区切られた2つのイメージの部分に限定される(貴重な情報が両方のイメージで利用可能である)。このように、サブサンプリングされた参照イメージSIr上で、サブサンプリングされた区切りマスクSMdによって定義された領域の外での要素を想像することにより、引き起こされた潅流査定の結果のいずれの劣化も回避できる。
【0063】
便宜上、類似性測定Vsは、正規化にされた相互情報(NMI)から成る。これは、再編成されるべきイメージのエントロピー測定に基づく、情報理論に用いられる測定である。特に、p(a)とp(b)は、それぞれヒストグラムを用いて計算された、一般的なイメージAとBにおける画素値の確率分布を示し、対応する限界エントロピーH(A) および H(B)は次式で示される。
【数2】
【0064】
限界エントロピーのH(A)とH(B)は、イメージAとBに関する情報量(すなわち、不確実性)を示し、イメージA、Bのヒストグラムが同質であるときは、より高く、そして、それらのヒストグラムが多くの広いピークを示す時は減少するエントロピーをそれぞれ持つ。
【0065】
同様に、イメージAとBの合成エントロピーH(A、B)は次式で与えられる。
【数3】
ここで、p(a、b)はイメージAとBの合成ヒストグラムから計算された複合確率分布である。合成エントロピーH(A、B)は、2つのイメージAとBが結合された時、両イメージの情報量を測定する。したがって、合成エントロピーH(A、B)は、2つのイメージAとBが最適に並べられたとき、最小量であり、それらの整列不良で(合成ヒストグラムに新しいピークが出現することにより)増加する。しかしながら、合成エントロピーH(A、B)は、2つのイメージAとBの重なっている領域のみについて計算できるので、重なりの程度によって変化する。
【0066】
この問題の解決策は、相互情報MI(A、B)によって与えられ、その相互情報MI(A、B)は、限界エントロピーH(A)とH(B)の合計と、2つのイメージA,Bの重なり領域における対応する合成エントロピーH(A、B)との差として定義される。
MI(A,B)=H(A)+H(B)-H(A,B)
【0067】
このように、合成エントロピーH(A、B)は、限界エントロピーH(A)とH(B)に関して正規化され、そして、重なっている領域の範囲への依存は、実質的に減少する。しかしながら、イメージAとBの(特にそれらの周りのイメージのために)非常に低い強度領域の重なりの変化は、不均衡に相互情報MI(A、B)に貢献する。様々な計画で相互情報MI(A、B)を正規化することによって、改善を得ることができる。正規化された相互報NMI(A、B)の提案された形態は次式で与えられる。
NMI(A,B)=[H(A)+H(B)]/H(A,B)
【0068】
正規化された相互情報(以下に、単に相互情報と呼ぶ)は、再編成されるべきであるイメージ内の画素の強度に鈍感である。したがって、この類似性測定は、どのような構造的な違い(および特に造影剤のフラックスによって身体部分に引き起こされたもの)も無視して、移動を補償する。この選択は、特に潅流査定において優秀な結果を提供する。
【0069】
便宜上、その相互情報は、合成エントロピーH(A、B)を提供する合成ヒストグラムを単に利用することで計算される。特に、合成ヒストグラムの各軸は、イメージAとBにおけるそれぞれピクセル値を指定する。そして、ヒストグラムの各ポイントは、2つのイメージA、Bにおける対応するピクセル値の合成確率を提供する。したがって、(各画素値のために)もう片方のイメージの軸に沿って合成確率を合計することによって、各イメージのための確率分布について計算することは可能である。
【0070】
計算機535によって出力された類似性測定Vsは、最適化器540に供給される。また、その最適化器540は、予測された変換Teを受け、その変換Teは、最適化手順を最適に接近させ、これにより、ローカルの最大値に陥るリスクを軽減するように、最適化器540の初期化のために用いられる。その最適化器540は、(計算で限定された浮動イメージCIfと計算で限定された参照イメージCIrとの間で)相互情報を繰り返しの手順で最大にする変換を計算する。望ましくは、この手順は、最も急な勾配のアルゴリズムに基づく。特に、各繰り返しのときに、最適化器540は、相互情報の最も高い勾配に対応する好ましい命令について計算する。中心の限定差分を使用することで勾配ΔNMI(x)を定義する導関数が実際に近似される。
ΔNMI(x)=[NMI(x+dx)-NMI(x-dx)]/2・dx
【0071】
次に、提案された変換Tpは、好ましい命令に沿って交互情報を最大にすることによって、計算される。プロセスを繰り返すために、提案された変換Tpは、幾何学的変換器515に提供される。相互情報における変化が閾値(例えば、5-10%)以下に低下した時、または、設定された繰り返し回数(例えば、10から15)の後で、最適化手順は終了する。選ばれたアルゴリズムは、短い計算時間で非常に正確な結果に提供し、例えば、アルゴリズムは典型的に、5回未満の繰り返しで収束する。
【0072】
最適化手順がいったん終わると、対応する最終の変換Tfが最適化器540により、変換シーケンサ545に提供される。そのモジュール545は、受け取った値から、サブサンプリングされた変換STのシーケンスを構築する。このために、(現在選択されたサブサンプリングされたイメージSIのための)最終的な変換Tfは、シーケンスSTに加えられる。(選択パラメータNsに基づき)シーケンスSIの1つ以上のサブサンプリングされたイメージが、イメージ選択器505によってスキップされたと仮定すると、これらのスキップされたサブサンプリングされたイメージSIに対する変換は、補間により計算される。
【0073】
サブサンプリングされた変換STのシーケンスは、予測移動モデル550に提供される。予測移動モデル550は、選択パラメータNs(これは、次に処理されるべきサブサンプリングされるイメージSIをサンプリングするためにイメージ選択器505に供給される)および、対応する予測された変換Te(これは、最適化手順を初期化するために最適化器540に供給される)を決定する。このために(明確化のために図では示されない)、予測移動モデル550は、シーケンス中のイメージの総数と、参照イメージの位置を受けなければならない。
【0074】
望ましくは、予測移動モデル550は、サブサンプリングされた変換のシーケンスSTのそれぞれの要素(X、Y、およびθ)の勾配について計算する。例えば、この操作は、最後の変換の各要素を、シーケンスST内での前の変換の対応する要素に結合するセグメントの傾斜を単に決定することで、実行される。選択パラメータNsは、その後、最も急である勾配の1つに基づいて計算される。例えば、最も急な勾配の角度係数が0.5より低いときに、シーケンス中で2つのイメージがスキップされ、角度係数が0.5から0.8の間のときに、シーケンス中で1つのイメージがスキップされ、そして、角度係数が0.8より高いときに、イメージはスキップされない。シーケンスSIのサブサンプリングされたイメージが実質的に変動しないとき、このように、シーケンスSIのサブサンプリングされたイメージの多くがスキップされ、その結果、不要な計算を回避する。一方、シーケンスSIのサブサンプリングされたイメージが鋭く変化するとき、シーケンスSIのサブサンプリングされたイメージの少ない量がスキップされ、その結果、良好な精度を保証する。この時のサブサンプリングは大きく処理時間を短縮し、そのうえ、その手順は、流動的な動画に自己適合する。
【0075】
そして、予測移動モデル550は、次のイメージが処理されるために、予測変換Teについて計算(そのように入手された選択パラメータNsによって特定される)する。変換の各要素X、Y、およびθに対し、このプロセスは望ましくは、単に、(最後の2回の利用可能な変換から)直線性の推定を適用して実行される。変換の模範的シーケンスの要素X、Y、およびθは図5dで示される。この場合、最も急な勾配は、要素θ(例えば0.6の角度係数)によって与えられる。その結果、ただ一つのサブサンプリングされたイメージは、シーケンスSI中でスキップされる。予測された変換Teを定義するそれぞれの要素(X、Y、およびθ)の値は、対応する矢印によって定義される。この選択は、できる限り高速な変換を見つける確率を大きく増加させる。
【0076】
図5aに戻って、サブサンプリングされた変換ST(かつて完全な)のシーケンスは、移動フィルタ555に供給される。フィルタ処理された変換FTの対応するシーケンスを得るために、移動フィルタ555は、シーケンスのそれぞれのサブサンプリングされた変換STにローパスフィルタを適用することにより、移動の補償の効果を整える。完全分解能プロセッサ560は、フィルタ処理された変換FTのシーケンスから変換Tのシーケンスを発生させる。それぞれフィルタ処理された変換FTのシーケンスの変換要素(XとY)は、分析セルCr (それぞれがPx および Py)の対応するサブサンプリング要素が乗算される。そして、このようにして得られた変換Tのシーケンスは、登録イメージシーケンサに転送される。
【0077】
図6aに進むと、登録イメージシーケンサ315の構造が詳細に例証される。特に、区切りマスクMdは、乗算オペレータ605を通じて各イメージIのシーケンスに適用される。この動作は、区切られたイメージDIの対応するシーケンスを発生させる。区切られたイメージDIのシーケンスおよび変換Tのシーケンスは、幾何学的変換器610に供給される。幾何学的変換器610は、それぞれの区切られたイメージDIのシーケンスを、シーケンスTの対応する変換に従って移動して変換された区切られたイメージTDIのシーケンスを発生させる。そして、乗算オペレータ615を通して、区切りマスクMdを、シーケンスTDIのそれぞれの変換された区切られたイメージに適用することによって、マスクされた区切られたイメージKTDIのシーケンスが得られる(図6bを参照)。このように、(変換Tのシーケンスを適用する前に)区切りマスクMdの外にあった画素と、(変換Tのシーケンスを適用した後の)区切りマスクMdの外へ移動する画素は自動的に捨てられる。
【0078】
同時に、区切りマスクMdは、インバータ620に提供され、そのインバータ620は、対応する反転区切りマスクMdを発生する。反転区切りマスクMdは、乗算オペレータ625を通して、シーケンスIの各イメージに適用され、対応するマスクされたイメージKIのシーケンスを得る。各々のマスクされたイメージのシーケンスKIは、次に、区切りマスクMdの外側の画素のみを含む(図6cを参照)。マスクされたイメージKIのシーケンスと、マスクされ変換された、区切られたイメージKTDIのシーケンスは、加算オペレータ640に入力される。2つのシーケンスの各イメージ対のために、加算オペレータ640は、画素ごとに対応する値の合計を計算する。この動作は登録されたイメージRIのシーケンスを発生させる。このように、マスクMdによって区切られたそれぞれのイメージの領域は、(捨てられた画素を取り除いて)再編成され、マスクMd外のイメージの部分は、変化されずに残される(図6dを参照)。
【0079】
登録イメージシーケンサ315は、更に幾何学的変換器645を含み、これは、区切りマスクMd および 変換Tのシーケンスを受け取る。幾何学的変換器645は、各変換Tのシーケンスを区切りマスクMdに適用して、変換された区切りマスクTMdの対応するシーケンスを発生する。変換された区切りマスクTMdのシーケンスは、カットしたマスクMtを発生する交差オペレータ650に提供する(図6eを参照)。このように、カットしたマスクMtは、貴重な情報がすべての登録イメージRI内で利用できる区切りマスクMdの一部に制限される。
【0080】
次に図7を参照すると、フロー定量化モジュール240の構造が詳細に例証される。特に、カットしたマスクMtは、乗算オペレータ705を通して、各登録イメージRIのシーケンスに適用され、イメージ内の無関係の情報が自動的に取り除かれる。この動作はカットしたイメージCIの対応するシーケンスを発生させる。カットしたイメージCIのシーケンスと空間分解能セルCrは、デシメータに供給される。デシメータ710は、上で登録プロセッサの空間的なサブ見本集に関して説明されたものと正しく同一である。特に、デシメータ710は、ローパスフィルタリングを適用し、そして空間分解能セルCrに基づき、各カットイメージCIのシーケンスを再サンプリングし、サブサンプリングされたカットイメージSCIの対応するシーケンスを得る。
【0081】
サブサンプリングされたカットイメージSCIのシーケンスは、低減したマスクMrを出力する低減器715に入力される。このために、低減器715は初めに、シーケンスSCIのそれぞれのサブサンプリングされたカットイメージの平均した明るさについて計算して、そのシーケンスの最も明るいイメージと最も暗いイメージを認識する。低減器715は、最も明るいイメージと最も暗いイメージの差を計算する。対応する画素のイメージ差が許容できる閾値(例えばイメージ差の最大値の5% から 20% の間)より高いなら、低減しているマスクMrの各画素に論理値1が割り当てられ、そうでないなら0が割り当てられる。そして、低減しているマスクMrは、乗算オペレータ720を通して、シーケンスSCIのそれぞれのサブサンプリングされたカットイメージに適用され、低減したイメージDIの対応したシーケンスを得る。このように、低減されたイメージDIのシーケンスは、シーケンスSCI中の著しい変化を示す画素値を単に含み、他方、造影剤の流れによって影響されない画素は捨てられる。このように、イメージは、重要な情報を提供する視覚化する要素に制限され、これは、イメージにおけるバックグラウンドノイズによって引き起こされた誤りを大きく抑える。シーケンスの最も激しいイメージと最も激しくないイメージの流動的な選択が、造影剤(例えば連続的なフローまたは塊として)を管理するのに使用される技術の如何にかかわらず方法の正しい操作を確実にすることに注意されるべきである。
【0082】
低減されたイメージDIのシーケンスは、分析器725に供給される。その分析器725は、それらのイメージによって表された潅流のプロセスの量的なパラメータについて計算する。通常、分析器725は、それぞれの画素の強度における変化をプロットするタイム・カーブを決定する。そして、この潅流カーブは、時間(t)に対するピクセル値(v)の次の関数によって与えられたモノタイプの指数のモデルに適合される。
【数4】
(ここで βは初期の補間の間の傾斜を定義する定数、Aは最大の画素値を定義する別の定数)
【0083】
そして、分析器725は、A・βの積によりあたえられた(フローの)潅流値を各画素に関連づけることによって、パラメトリックイメージPIを発生させる。
【0084】
図8aから8cで示されるように、この発明の具体化は、スタートブロック802で始まる方法800を実行する。ブロック804に進むと、潅流のプロセスを受ける患者の身体部分のイメージシーケンスが取得される。
【0085】
次に、登録手順がシーケンスのイメージに適用され、典型的にその手順は、オフライン(例えば試験の終わり)に実行される。特に、その登録手順は、ブロック806で始まり、オペレータが(他の動画を再編成するための)参照イメージを選択する。次にブロック808では、オペレータは参照イメージ上の区切りマスクを定義しなければならない。このために、オペレータはプルダウンメニューから必要な形を選択できる。望ましくは、区切りマスクは多角形から成り、 非常に簡単な構造で高度の柔軟性を提供するので、提案された形は特に有利である。この場合、オペレータは参照イメージの一連のポイントを(マウスでそれらをクリックして)選択する。ポイントの選択は、ESCキーをタイプすることによって、終了する。彼らの選択命令により、ポイントを接合することによって定義されたカーブ(最後のポイントから最初のポイントまで動いて閉じるカーブがある)は、多角形を定義し、それは、モニター上に表示される。論理値1を多角形の内側のビットに、そして、論理値0を多角形の外側のビットに割り当てることにより、区切りマスクは、次に構築される。必要なら、区切りマスクに更に1つ以上の多角形を加えるため、上で説明された同じ操作が繰り返すことができる。同様に、オペレータはブロック810にて、参照イメージ上で特徴マスク(1つ以上の多角形から成る)を定義する。
【0086】
ブロック812に進むと、見積り領域が参照イメージからサンプリングされる。この方法は、次にブロック814へ進み、見積り領域の空間周波数分析に従って、空間分解能セルのサイズが計算される。そして、ブロック818でイメージおよび(区切りおよび特徴)マスクは、低減される、つまり、空間分解能セルに基づき、ローパスフィルタ処理され、再サンプル処理がなされる。
【0087】
(参照イメージに関して動画を再編成するために)動画に対して適用されるべき変換を計算してするために、シーケンス内の参照イメージによって定義されたそれぞれのサブシーケンスに対して、一度、ループが実行される。最初のループの繰り返し(ブロック820)は、参照イメージから最初のイメージまで減少している順に、動画に適用されます。そのループはブロック822でスタートし、0値に初期化された提案された変換でもって、参照イメージに近接した動画が選択される。ブロック824に進み、提案された変換は、現在の動画および区切りマスクとに適用される。計算マスクは次にブロック826で決定される。この方法はブロック827へ進み、それぞれ計算で限定された浮動イメージと計算で限定された参照イメージを得るために、計算マスクは、動画イメージおよび参照マスクとに適用される。ブロック828に進み、(2つのイメージの整列を示す)同様な測定が計算される。類似性測定における変化が、必要な閾値より高く、そして繰り返し数が最大許容値以下なら、この方法はブロック830へ進む。従って、提案された変換はアップデートされ、そして、次に、この方法はブロック824に戻り、アルゴリズムを繰り返す。
【0088】
逆に、その変化が、閾値を(または繰り返しの最大許容数の後に)下回るとき、活動のフローはブロック834へ下る。この段階では、そのように得た、提案された変換は、現在の動画のために完結される。そのうえ、スキップされた動画(もしあるならば)に対する変換は、補間により計算される。そうでなければ、動作のフローは、ブロック838に進み、(現在の動画のための)変換の要素に対する最も急な勾配が特定される。(適切であるなら)所望の動画をスキップするために、処理されるべき次の動画の選択パラメータは、ブロック840にて(そのように特定された最も急な勾配に従って)決定される。ブロック842に進み、次の動画のための予測された変換は、最後の2回の利用可能な変換から見積もられる。予測された変換は、次の動画のために最適化アルゴリズムを初期化するためにブロック844で使用される。この方法は次にブロック824に戻り、次の動画を処理する。
【0089】
サブシーケンスに関するすべての動画がいったん処理されると(ブロック836)、フローの動作はブロック846に下る。両方のサブシーケンスが分析されたかどうか決定するためのテストが行われる。そうでなければ、上で説明されたループは、参照イメージから最後のイメージまで増大する順の動画に対して、再繰り返される(ブロック848)。そして、この方法はブロック822に戻って、再びループをスタートさせる。
【0090】
戻ってブロック846を参照すると、すべての動画が処理されたなら、フローの動作はブロック850に進む。この段階では、そのように得られた変換のシーケンスはローパスフィルタで処理される。プロセスは次にブロック851に進み、(完全分解能の)変換のシーケンスは、(各変換された要素に、対応する分解能セルのサブサンプリングされたファクタを乗算して)フィルタ処理された変換のシーケンスから得られる。
【0091】
次にブロック852を参照すると、区切りマスクは動画に適用される。ブロック854に進むと、各々の得られた区切られたイメージは、対応する変換に基づき移動される。区切りマスクは再びブロック856にて、変換されたイメージに適用される。次にブロック858を参照すると、登録されたイメージは、(区切りマスク外側の元のイメージの対応する部分を加算することにより)完成され、そして保管される。同時に、カットするマスクはブロック860で決定される。
【0092】
そして、フロー定量化手順は、登録されたイメージのシーケンスに適用される。その手順はブロック862で開始され、カットするマスクは、登録されたイメージに適用される。カットされたイメージは次にブロック864にて、(空間分解能セルに基づき)低減される。ブロック866に進むと、低減器は、シーケンス中の最も明るいイメージと最も暗いイメージとを識別する。低減するマスクはブロック867でそれらのイメージから計算される。そして、カットされたイメージは、ブロック868でそのように得られたマスクを適用することによって低減される。次にブロック870では、すべての低減されたイメージ中のそれぞれの有効な画素(0以外の値を持つ)に対し、潅流プロセスの必要な量的なパラメータが計算される。得られたパラメトリックイメージは、対応する格納器に格納される。この方法は、最終のブロック872にて終了する。
【0093】
特徴マスクがシースルーの窓であるとみなすことによって、上で説明されたアルゴリズムをより直観的に説明することができる。この窓は、参照イメージの特徴を示し、その参照イメージは、再編成されるべき各動画でサーチされなければならない。このために、この方法は、その窓の下で常に動画をシフトさせ、次に、必要な特徴が見つけられたかどうか確かめる。それぞれの試みで、関心がない(すなわち、区切りマスクの外の)動画の領域が窓に入るなら、窓の対応する部分は見えなくされる。参照イメージ内およびシフトされた動画イメージ内の窓の明確な部分を通じて観察された領域は、その後に比較される。(所望されるレベルの精度で)適合が一旦見つけられると、そのように得られた動画は、参照イメージに対し自動的に再編成される。
【0094】
もちろん、動画上で窓を移動させ(所望の特徴をサーチする)ことによっても、同じ結果を得ることができる。この場合、窓が関心のない動画の領域に達するなら、また、窓の対応する部分が見えなくされる。しかしながら、その比較のための参照イメージで選択された特徴を特定するために、窓に対して参照イメージを動かすか、または窓を、参照イメージ上の元の位置に返すかが、必要となる。そのうえ、適合がいったん見つけられると、動画を正しく参照イメージに再編成するために、その動画は、逆方向に(窓のシフトに関して)シフトしなければならない。
【0095】
より正式には(簡単にするためにサブサンプリングの作業を無視する)、提案されたアルゴリズムの異なる実施では、あらゆる提案された変換が特徴マスクに適用される。計算マスクは、変換さけた特徴マスクと(元の)区切りマスクとの間の補間として、次に決定される。計算マスクは、(計算が限定された動画イメージを得るために)動画に適用される。計算が限定された参照イメージは、提案された変換を参照イメージに適用し、そして、計算マスクを、得られた変換された参照イメージに手供養することによって、代わりに得られる。代わりに、提案された変換の逆数は、計算マスクに適用され、そして、次に、結果として起こる変換された計算マスクは、(オリジナル)の参照イメージに適用される。提案された変換の逆数は、それぞれの要素(すなわち、X、Y、およびθ)の符号を逆にすることによって得られる。どのような場合でも、計算が限定される浮動イメージと、計算が限定された参照イメージとの間の類似性測定は計算される。類似性測定における変化が閾値を下回るまで(または繰り返しの最大の許容数の後に)、同じ操作は繰り返されます。しかしながら、動画のための最終的な変換は、次に、そのように得られた提案された変換の逆数に設定される。この方法は、先の場合と同様に続く。また、上で説明された解決策は、三次元(3D)のイメージに広げることができます。図9に示されるように、この幾何学的な表現と議論を容易にするために、身体部分は、一連のフレーム905a-905c(例えば問題の3つ)からなる(各瞬間の)3Dイメージボリューム905としてみなされるもしれない。そのフレームは、平行な面910a-910cに沿って身体部分を区分する対応する部分を定義する。典型的にこの部分は、各部分は、単一のボクセルの厚さに等しい。登録アルゴリズムは上で説明されたものと同様である。特に、オペレータは参照イメージ上で、3D区切りマスクと3D特徴マスクを定義する。例えば、各マスクは、参照イメージの中心フレーム上に楕円を描き、そして、次にその深さを選択することにより、図形を3Dに拡大することにより決定された、楕円からなる。そのうえ、各動画のための変換は、6つの要素(x軸、y軸、z軸に沿った3つの変換、および、ピッチ、回転、揺動に対する3つの回転)によって定義される。そして、最適化ループは、それぞれのイメージの複数のフレーム上で動作する。このように、動画は、相互情報のグローバルな最適化により提供すれるような、実際の3Dアプローチでもって再編成される。
【0096】
上で説明された解決策は、分析時の身体部分の動きを効率的に補償し、これにより、イメージの調整不良に起因するいかなる人工的な影響をも実質的に排除する。これは、医療画像処理の精度を大幅に改善する。例えば、この発明の解決策は、SN比(SNR)の実質的な増大を提供する。提案された解決策は、(精度と空間分解能の双方での)分析の結果の品質を大幅に増大する。各動画のための計算マスクの流動的な定義は、効率的に境界効果を制御する。それにより、区切りマスク外の情報によって引き起こされた結果のいずれの劣化も回避する。上記の利点が現実的な計算の複雑さで得られることに注意されるべきである。そのことが、実用的な速度による提案された解決策を、最も実用的な速度に適用することを可能にする。上記のすべてが超音波画像診断における、潅流査定の臨床への適用を促進する。
【0097】
上記の利点の図示が図10aから10bに提供される。特に図10aを考察すると、全く登録のない腎臓イメージの模範的シーケンスは、例えば、モノタイプの指数モデル1010aに適合する潅流カーブ1005aを発生させる。理解できるように、潅流カーブ1005aは実質的に、対応するモデル1010aと異なっている。逆に、図10bは、潅流カーブ1005bおよび、上で説明された登録手順を適用した後の同じイメージシーケンスに対するそれぞれのモノタイプの指数モデル1010bを示す。現在の潅流カーブ1005bが対応するモデル1010bによりよく合致していることは明白である。より明確には、潅流カーブ1005bは、図10aの潅流カーブ1005aと比べて、データとモデルとの間で実質的に減少している平均の標準誤差を示す。定量的な測定値は、得ることができる精度の改善が、ほとんどの実用的な状況で20%より高く、そして、典型的には20%より高いことを示す。
【0098】
[変形例]
当然、当該技術に熟達した者は、局所的で特定の要件を満たすために、解決策を上述の多くの変更と変形に適用してもよい。特に、この発明は、それの好ましい実施例に関連して、ある程度詳しく述べてきたが、他の実施例化と同様に、形態および詳細における様々な省略、代替、および変更が可能であることを理解すべきである。この発明の開示されたあらゆる実施例にも関連して述べた特定の要素、および/または、方法ステップが、設計選択の一般的な事項として、他のあらゆる実施例に組み込まれることも明白に意図している。
【0099】
例えば、スキャナが異なった構造を持っているか、または他のユニット(プリンタなど)を含んでいるなら、同様の問題が適用される。同様に、イメージは、異なった解像度で取られるか、または異なった形式で格納されてもよい。
【0100】
代わりに、各マスクは、異なった形(例えば、正方形、楕円またはいずれかの任意の形)であってもよく、またはそれはただ一つの閉曲線から成るかもしれない。どのような場合でも、別の方法(例えばそれらの境界の座標を通時じて)で区切りマスクか特徴マスクのどちらかを定義することは可能である。さらに、自動画像分析アルゴリズムによって両方のマスクを入手する可能性も排除されない。例えば、公知の自動境界検出方法により、区切り、および/または、特徴マスクの輪郭描写を実行することができる。代わりに、特徴マスクは、区切りマスクの固定割合として、描画されることができる(例えば、区切りマスクの内側境界に沿ったマージンにより六定される)。望ましくは、そのような割合は、区切りマスクの領域の50% から 100%の間、より好ましくは、55% から 65%の間の領域を占める。例えば、浸食などの形態学的なイメージプロセッシングオペレータの援助により、前述の輪郭描写を実行することができる。
【0101】
そのうえ、登録プロセスの間、直接に各動画を参照イメージと比べることは厳密には必要でない。例えば、また、各動画を、再編成された隣接の動画と比べることによって、同じ結果が間接的に獲得されてもよい。提案された解決策は、異なったカテゴリの最適化アルゴリズム(例えば選択された目印に基づいて)で実施されることも適切である。
【0102】
登録プロセッサがアーキテクチャを持つなら、同様な考察が適用される。例えば、移動見積り器と登録されたイメージシーケンサを、(各変換を決定し、そして直接対応する動画に適用する)単一のモジュールに、組み込むことは可能である。
【0103】
さらに、異なった技術は、変換を適用するために用いられてもよい。特に、各要素(マスク、イメージ、またはそれの一部など)を変換する動作は、所望される変換に基づき、要素の画素値の実際の変換として上述されてきた。しかしながら、その動作は、(それの起源、および/または、前記起源の周りの回転の変換により)要素の座標系を変換することと同等であることは、容易に明らかであるべきである。この場合、要素の画素値は変換されないが、それらは変換された座標系に関連つけられる。
【0104】
以上の記述では、説明は、特定の最適化アルゴリズムに対して成されたが、これは限定を意図するものではない。例えば、また、(変換の代わりに)類似性測定自体が閾値に達した時、最適化手順を止めることによって、または、いずれかの同等な計算技術(繰り返し作業に全くかかわっていなくても)を適用することにより、同じ結果が獲得されてもよい。
【0105】
そのうえ、(ただ一つに低減された)シーケンス内の動画の部分集合のみに対する提案された解答を適用することを防止しない。
【0106】
どのような場合でも、区切りマスク内で定義されない特徴マスクで実行されるために、この発明の解決策は、それ自体が役に立つ。
【0107】
また、いくつかの特定の状況では、区切りマスクより実質的に小さい特徴マスクを使用するのが好ましい。
【0108】
代わりに、正規化された相互情報は、次式のような異なった公式で定義されてもよい。
NMI(A,B) = 2MI(A,B) / [H(A)+H(B)]
NMI(A,B) = H(A,B)-MI(A,B) または
NMI(A,B) = [H(A)+H(B)] / H(A,B)
【0109】
どのような場合でも、正規化を全く含まない相互情報の使用は除外されない。また、相互情報は、3つの異なったヒストグラムを使用して計算されてもよく、または、相互情報を最大にする変換は、異なったアルゴリズム(パウエルまたはSimplex法など)で決定することができる。しかしながら、また、他の類似性測定(正方形の差の合計など)の使用は、それがはるかにも有利でないとしても、除外されないことに注意されるべきである。
【0110】
空間的なサブサンプリングが別の構造を持つか、または同等なアルゴリズムを実施するなら、同様な考慮が適用される。例えば、サブサンプリング要素は、(サブサンプリング動作の間に補間技術を用いるデシメータによる)断片的な値を持つことができ、または、調整されたデシメータマスクに対応する全体の領域内で計算できる。代わりに、空間分解能セルのサイズは、別の技術(wavelet分析など)で決定される。そのうえ、デシメータは、異なったフィルタで、または限定された参照イメージを全くフィルタ処理でさえもすることなく、実行されることが適する。代わりに、イメージは、(例えば、所定のサブサンプリング要素を用いて)他の評価基準に基づくサブサンプリングされる。どのような場合でも、少しも空間的なサブサンプリングのない発明の方法の実現は、除外されない。
【0111】
この発明の異なる具体化では、最適化器は別の方法で初期化される。例えば、より洗練された実施では、予測された変換は、直線的な予測フィルタに基づいてなど他のアルゴリズムを用いて見積もられる。どのような場合でも、各繰り返しでヌル値への初期化は可能である。
【0112】
代わりに、(少しも見積りプロセスを用いずに)最適化器を、前の動画に対する変換に直接に初期化することは可能である。
【0113】
この発明の他の具体化は、静的に定義された多くの動画のスキップを含む。どのような場合でも、すべての動画のための変換の計算にかかわる実施は熟考される。
【0114】
そのうえ、シーケンスの始めか終わりでの参照イメージの選択は、使用目的によっては実行可能である。
【0115】
また、提案された解決策も、変換を全体の動画(および、区切りマスクによって特定された領域だけには適用されない)に適用することにより、実行されることが適切である。代わりに、区切りマスク外のそれぞれのオリジナルのイメージの部分を、対応する登録されたイメージに追加することを避けること、または、精密でない変換(例えば、アフィン変換かB-スプラインに基づく変換)を使用することは可能である。
【0116】
代わりに、登録プロセスの間、動画のすべての画素を保存することができる。
【0117】
また、さらに、いずれのカット用マスクも用いることなく、この発明の解決策を実行に移すことができる。
【0118】
代わりに、最も明るいイメージと最も暗いイメージは異なった方法(例えばイメージの平均した明るさについて計算しないで)で決定される。どのような場合でも、他の評価基準に従って、低減器が最も激しいイメージと最も激しくないイメージを決定するなら、同じ概念が適用される。使用目的によっては(例えば、造影剤が例えば連続したフローとして管理されるとき)、シーケンスの最初のイメージと最後のイメージにおける画素値の差に従って、または、オペレータにより選択された2つの一般的な画像間の差に基づいて、低減用マスクを決定することは可能である。しかしながら、(いずれの低減用マスクをも用いることなく)全体の登録されたイメージの分析は熟考される。
【0119】
この発明の別の具体化では、それぞれの3Dイメージは、異なったフレーム数によって形成されるか、または対応する部分は別の方法で定義される。そのうえ、異なった形を持っている3Dマスクを使用することは可能である。代わりに、3D実現におけるイメージのシングルフレーム内の計算領域の定義は、排除されない。
【0120】
同様に、フロー定量化モジュールは、別の構造であってもよく、または、等価なユニットを含んでもよい。さらに、異なったパラメータ、(パラメトリックのイメージの値を分類し、そしてグループ化することによって)一般的な潅流値を計算すること、または、いずれのパラメトリックイメージも発生させることなく、潅流を評価することも可能である。しかしながら、他の医療画像処理アプリケーション(例えば、いずれの造影剤をも管理することのない簡単な超音波検査法)で提案された解決策の開発が熟考される。
【0121】
また、同じ概念を、他の技術、例えば、エックス線のコンピュータ断層法(CT)、磁気共鳴映像法(MRI)またはポジトロン断層法(PET)に基づくスキャナに適用することができる。
【0122】
(この発明を実施するのに使用されるかもしれない)プログラムが異なった方法で構造化されるか、または増設されたモジュールまたは機能が備えられるなら、同様な考察が適用される。そのうえ、提案された解決策は、同等な方法(例えば同様な、または、追加的なステップでもって)で実施されるために、その解決策自体が提供される。どのような場合でも、そのプログラムは、外部の、または、内包のソフトウェア、ファームウェア、またはマイクロコード(オブジェクトコードかソースコードの)などのような、いずれかのデータ処理システムにより、またはそれに関連して使用されるために、いずれの形態を採用してもよい。そのうえ、そのプログラムは、いずれのコンピュータ利用可能な媒体上に備えられてもよく、その媒体は、プログラムを含むか、保存するか、通信するか、伝播するか、または移動するのに適したいずれの要素であってもよい。そのような媒体に関する例は、(プログラムをプレロードできる)固定ディスク、取り外し可能なディスク、テープ、カード、ワイヤ、ファイバー、無線接続、ネットワーク、放送波などであり、例えば、その媒体は、電子、磁気、光学、赤外線、または半導体のタイプであってもよい。
【0123】
どのような場合でも、この発明に従った解決策は、ハードウェア構造で(例えば、集積化された半導体材料のチップ)、またはソフトウェアとハードウェアの組み合わせによって実施されるために、それ自体が提供される。
【0124】
代わりに、画像診断システムは、スキャナおよび異なったコンピュータ(または、いずれかの同等なイメージ登録装置)から成る。この場合、記録されたデータは、それの処理のために、スキャナからコンピュータへ(例えばフロッピーディスク、メモリペン、またはネットワーク接続によって)転送される。
【図面の簡単な説明】
【0125】
【図1】この発明の具体化に基づく解決策が適用される画像診断システムを示す図
【図2a】この発明の具体化に基づく解決策を実行するのに使用することができるメインのソフトウェア要素を示す図
【図2b】この発明の具体化にてイメージを再編成するのに使用される区切りマスクと特徴マスクに関する例を示す図
【図3】この発明の具体化に基づく、登録プロセッサの概略ブロック図
【図4a】この発明の具体化に基づく空間的なサブサンプラーの構造を示す図
【図4b】この発明の具体化における空間的なサブサンプラーによって使用される異なった情報を示す図
【図4c】この発明の具体化における空間的なサブサンプラーによって使用される異なった情報を示す図
【図4d】この発明の具体化における空間的なサブサンプラーによって使用される異なった情報を示す図
【図5a】この発明の具体化における移動見積り器の構造を示す図
【図5b】この発明の具体化における移動見積り器によって使用された異なった情報を示した図
【図5c】この発明の具体化における移動見積り器によって使用された異なった情報を示した図
【図5d】この発明の具体化における移動見積り器によって使用された異なった情報を示した図
【図6a】この発明の具体化に基づく登録イメージシーケンサの構造を示す図
【図6b】この発明の具体化における登録イメージシーケンサにより使用された異なった情報を示した図
【図6c】この発明の具体化における登録イメージシーケンサにより使用された異なった情報を示した図
【図6d】この発明の具体化における登録イメージシーケンサにより使用された異なった情報を示した図
【図6e】この発明の具体化における登録イメージシーケンサにより使用された異なった情報を示した図
【図7】この発明の具体化に基づくフロー定量化モジュールの構造を示す図
【図8a】この発明の具体化に基づく解決策の実施を示したフローチャート
【図8b】この発明の具体化に基づく解決策の実施を示したフローチャート
【図8c】この発明の具体化に基づく解決策の実施を示したフローチャート
【図9】この発明の具体化に基づく解決策の三次元への適用を示した図
【図10a】イメージの登録なしと、この発明の具体化に基づく登録ありとの潅流カーブを示す図
【図10b】イメージの登録なしと、この発明の具体化に基づく登録ありとの潅流カーブを示す図
【符号の説明】
【0126】
100:画像診断システム
105:中央ユニット
110:アレープローブ
125:マザーボード
130:ドーター・ボード
135:ドライバ
145:モニター
205:格納器
210:登録モジュール
220:セレクタ
230:モニタデバイス
235:登録プロセッサ
310:移動見積り器
315:登録イメージシーケンサ
405:調整器
415:乗算オペレータ
425:空間周波数分析器
505:イメージセレクタ
510:最適化ループ
【特許請求の範囲】
【請求項1】
医療画像処理における使用のためのイメージ登録方法(800)であり、
分析下の身体部分のディジタル描写を各々が含む複数のイメージのシーケンスを提供するステップ(804)と、
そのシーケンスの中で参照イメージを選択するステップ(806)と、
参照イメージに関連して、動画の少なくとも一部を再編するステップ(808-854)とを備え、
前記シーケンスの残りのイメージは動画を構成し、前記再編するステップは、
a) 動画の少なくとも1つの部分が再編成されなければならない参照イメージの領域を特定する区切りマスク、および、再編成が計算される参照イメージのさらなる領域を特定する特徴マスクを定義するステップ(808,810)と、
b) 以下の間における類似性測定を最適化することにより、参照イメージに関する動画の置換を補償するための最適化された変換を決定するステップ(820-851)と、
c) 最適化された変換に基づき、動画の少なくとも一部を変換するステップ(854)とを備え、
前述の「以下の間」とは、
b1)参照イメージ上で計算マスクにより特定された第1の計算領域と、提案された変換に基づき変換された動画上で計算マスクにより特定された第2の計算領域との間であり、前記計算マスクは、提案された変換に基づき変換された区切りマスクと、特徴マスクとの間の交差部により決定され、または、
b2) 提案された変換に基づき変換された参照イメージ上で計算マスクにより特定された第1の計算領域と、動画上で計算マスクにより特定された第2の計算領域との間であり、前記計算マスクは、提案された変換に基づき変換された特徴マスクと、区切りマスクとの間の交差部により決定され、または、
b3) 提案された変換の逆変換に基づき変換された計算マスクにより、参照イメージ上で特定された第1の計算領域と、動画イメージ上で計算マスクにより特定された第2の計算領域との間であり、前記計算マスクは、提案された変換に基づき変換された特徴マスクと、区切りマスクとの間の交差部により決定される、方法。
【請求項2】
転送するステップ(c)は、
c1) 最適化された変換がステップ(b1)に基づき決定された時、最適化された変換を動画の少なくとも1部に適用するステップまたは、
c2) 最適化された変換がステップ(b2またはb3)に基づき決定された時、最適化された変換の逆数を動画の少なくとも1部に適用するステップを含む請求項1記載の方法(800)。
【請求項3】
最適化された変換を決定するステップ(820-851)は、類似性測定またはそれの変化がしきい値に達する(830)まで、閾値に達するまで(824-828) 提案された変換に対応する類似性測定を繰り返して計算することを含む請求項1または2に記載の方法(800)。
【請求項4】
シーケンスのさらなる各動画に対する再編成するステップ(808-854)の繰り返しを含む請求項1から3のいずれかに記載の方法(800)。
【請求項5】
特徴マスクは、区切りマスク内で決定される請求項1から4のいずれかに記載の方法(800)。
【請求項6】
特徴マスクは、区切りマスクのサイズの50%以上のサイズを持つ請求項1から5のいずれかに記載の方法(800)。
【請求項7】
類似性測定は相互情報の測定である請求項1から6のいずれかに記載の方法(800)。
【請求項8】
参照イメージの各寸法に沿って 空間分解能を見積もるステップ(812-814)と、
空間分解能に従って、 各寸法に対するサブサンプリング要素を計算するステップ(816)と、および
サブサンプリングに基づき、少なくともそれぞれのイメージの一部をサブサンプリングするステップ(818)とを更に含む請求項1から7のいずれかに記載の方法(800)。
【請求項9】
空間分解能を見積もるステップ(812-814)は、長方形の形を持ち、かつ、特徴マスクを囲む最も小さい長方形に含まれている参照イメージ上で見積り領域を決定するステップ(812)を含み、その空間解像度は、見積もり領域内で見積もられる請求項8に記載の方法(800)。
【請求項10】
シーケンスは、各々が参照イメージから対応するシーケンスの境界イメージまで順序付けられた少なくとも1つのサブシーケンスを含み、最適化された変換を決定するステップ(820-851)は、基準イメージに接近していない各々次の動画のために、対応するサブシーケンス内の少なくとも1つの以前の動画に対する最適化された変換に基づき、次の動画に対する提案された変換を初期化するステップ(842-844)を更に含む請求項4から9のいずれかに記載の方法(800)。
【請求項11】
少なくとも1つの以前の動画が、以前の多くの動画から成り、次の動画に対する提案された変換を初期化するステップ(842-844) は、以前の動画に対する適正化された変換に基づく予測アルゴリズムを通じ、次の動画に対する提案された変換を見積もるステップ(842)を含む請求項10記載の方法(800)。
【請求項12】
次の動画を定義するための対応するサブシーケンス内の現在の動画に従って、 多くの個数の動画をスキップするステップ(838-840)と、
現在の動画のための最適化された変換と次の動画のための最適化された変換のと間の各々スキップされた動画に対する最適化された変換を補間するステップ(834)とを備え、
前記個数は、現在の動画のための最適化された変換の勾配に従って決定される請求項10または11に記載の方法(800)。
【請求項13】
基準イメージはシーケンスの境界イメージと異なり、少なくとも1つのサブシーケンスは、参照イメージからシーケンスの第1のイメージへ順次付けられたサブシーケンスおよび、参照イメージからシーケンスの最後のイメージへ順序づけられた別のサブシーケンスからなる請求項10から12のいずれかに記載の方法(800)。
【請求項14】
各変換は、正確な変換である請求項1から13のいずれかに記載の方法(800)。
【請求項15】
各イメージは、各々が身体部分の対応する基本的な領域を表す、多数の視覚化の要素を含み、各動画に対し、この方法は、区切りマスクの外にある最適化された変換に基づいて変換された動画の各々の視覚化する要素を廃棄するステップ(852,856)を更に含む請求項1から14のいずれかに記載の方法(800)。
【請求項16】
要素が少なくとも動画の1つにおいて廃棄される各々の視覚化要素を廃棄することにより、各イメージを低減するステップ(860-862)および、低減されたイメージに基づき、分析の結果を決定するステップ(870)を更に備える請求項15に記載の方法(800)。
【請求項17】
シーケンス内の最も激しいイメージと最も激しくないイメージを特定するステップ(866)と、
各基本的な領域に対し、最も激しいイメージ内の対応する視覚化像要素と、最も激しくないイメージ内の対応する視覚化像要素との差を計算するステップ(867)と、および
対応する差がしきい値より低いなら、すべてのイメージ内の基本的な領域に対する視覚化要素を廃棄するステップ(868)とを更に含む請求項16に記載の方法(800)。
【請求項18】
各イメージ(905)は、各々が身体部分の対応する部分を示す複数のフレーム(905a-905c)、区切りマスクおよび、参照イメージの少なくとも2つのフレーム上に定義される特徴マスクを含む請求項1から17のいずれかに記載の方法(800)。
【請求項19】
それぞれのイメージは身体部分の超音波応答を表す請求項1から18のいずれかに記載の方法(800)。
【請求項20】
分析は身体部分での造影剤の潅流の査定から成る請求項1から19のいずれかに記載の方法(800)。
【請求項21】
コンピュータプログラムがデータ処理システム(105)で実行されたとき、請求項1から20のいずれかに記載の方法(800)を実行するコンピュータプログラム。
【請求項22】
コンピュータプログラムを具体化したコンピュータ利用が可能な媒体を含むコンピュータプログラム製品であり、データ処理システム上で実行された時、そのコンピュータプログラムは、請求項1から20のいずれかに基づく方法をシステムに実行させることを特徴とするコンピュータプログラム製品。
【請求項23】
請求項1から20のいずれかに基づく方法のステップを実行するための手段(200)を含むイメージ登録装置(105)。
【請求項24】
請求項23に基づく登録装置(105)およびイメージのシーケンスを取得するための手段(110)を含む画像診断システム(100)。
【請求項1】
医療画像処理における使用のためのイメージ登録方法(800)であり、
分析下の身体部分のディジタル描写を各々が含む複数のイメージのシーケンスを提供するステップ(804)と、
そのシーケンスの中で参照イメージを選択するステップ(806)と、
参照イメージに関連して、動画の少なくとも一部を再編するステップ(808-854)とを備え、
前記シーケンスの残りのイメージは動画を構成し、前記再編するステップは、
a) 動画の少なくとも1つの部分が再編成されなければならない参照イメージの領域を特定する区切りマスク、および、再編成が計算される参照イメージのさらなる領域を特定する特徴マスクを定義するステップ(808,810)と、
b) 以下の間における類似性測定を最適化することにより、参照イメージに関する動画の置換を補償するための最適化された変換を決定するステップ(820-851)と、
c) 最適化された変換に基づき、動画の少なくとも一部を変換するステップ(854)とを備え、
前述の「以下の間」とは、
b1)参照イメージ上で計算マスクにより特定された第1の計算領域と、提案された変換に基づき変換された動画上で計算マスクにより特定された第2の計算領域との間であり、前記計算マスクは、提案された変換に基づき変換された区切りマスクと、特徴マスクとの間の交差部により決定され、または、
b2) 提案された変換に基づき変換された参照イメージ上で計算マスクにより特定された第1の計算領域と、動画上で計算マスクにより特定された第2の計算領域との間であり、前記計算マスクは、提案された変換に基づき変換された特徴マスクと、区切りマスクとの間の交差部により決定され、または、
b3) 提案された変換の逆変換に基づき変換された計算マスクにより、参照イメージ上で特定された第1の計算領域と、動画イメージ上で計算マスクにより特定された第2の計算領域との間であり、前記計算マスクは、提案された変換に基づき変換された特徴マスクと、区切りマスクとの間の交差部により決定される、方法。
【請求項2】
転送するステップ(c)は、
c1) 最適化された変換がステップ(b1)に基づき決定された時、最適化された変換を動画の少なくとも1部に適用するステップまたは、
c2) 最適化された変換がステップ(b2またはb3)に基づき決定された時、最適化された変換の逆数を動画の少なくとも1部に適用するステップを含む請求項1記載の方法(800)。
【請求項3】
最適化された変換を決定するステップ(820-851)は、類似性測定またはそれの変化がしきい値に達する(830)まで、閾値に達するまで(824-828) 提案された変換に対応する類似性測定を繰り返して計算することを含む請求項1または2に記載の方法(800)。
【請求項4】
シーケンスのさらなる各動画に対する再編成するステップ(808-854)の繰り返しを含む請求項1から3のいずれかに記載の方法(800)。
【請求項5】
特徴マスクは、区切りマスク内で決定される請求項1から4のいずれかに記載の方法(800)。
【請求項6】
特徴マスクは、区切りマスクのサイズの50%以上のサイズを持つ請求項1から5のいずれかに記載の方法(800)。
【請求項7】
類似性測定は相互情報の測定である請求項1から6のいずれかに記載の方法(800)。
【請求項8】
参照イメージの各寸法に沿って 空間分解能を見積もるステップ(812-814)と、
空間分解能に従って、 各寸法に対するサブサンプリング要素を計算するステップ(816)と、および
サブサンプリングに基づき、少なくともそれぞれのイメージの一部をサブサンプリングするステップ(818)とを更に含む請求項1から7のいずれかに記載の方法(800)。
【請求項9】
空間分解能を見積もるステップ(812-814)は、長方形の形を持ち、かつ、特徴マスクを囲む最も小さい長方形に含まれている参照イメージ上で見積り領域を決定するステップ(812)を含み、その空間解像度は、見積もり領域内で見積もられる請求項8に記載の方法(800)。
【請求項10】
シーケンスは、各々が参照イメージから対応するシーケンスの境界イメージまで順序付けられた少なくとも1つのサブシーケンスを含み、最適化された変換を決定するステップ(820-851)は、基準イメージに接近していない各々次の動画のために、対応するサブシーケンス内の少なくとも1つの以前の動画に対する最適化された変換に基づき、次の動画に対する提案された変換を初期化するステップ(842-844)を更に含む請求項4から9のいずれかに記載の方法(800)。
【請求項11】
少なくとも1つの以前の動画が、以前の多くの動画から成り、次の動画に対する提案された変換を初期化するステップ(842-844) は、以前の動画に対する適正化された変換に基づく予測アルゴリズムを通じ、次の動画に対する提案された変換を見積もるステップ(842)を含む請求項10記載の方法(800)。
【請求項12】
次の動画を定義するための対応するサブシーケンス内の現在の動画に従って、 多くの個数の動画をスキップするステップ(838-840)と、
現在の動画のための最適化された変換と次の動画のための最適化された変換のと間の各々スキップされた動画に対する最適化された変換を補間するステップ(834)とを備え、
前記個数は、現在の動画のための最適化された変換の勾配に従って決定される請求項10または11に記載の方法(800)。
【請求項13】
基準イメージはシーケンスの境界イメージと異なり、少なくとも1つのサブシーケンスは、参照イメージからシーケンスの第1のイメージへ順次付けられたサブシーケンスおよび、参照イメージからシーケンスの最後のイメージへ順序づけられた別のサブシーケンスからなる請求項10から12のいずれかに記載の方法(800)。
【請求項14】
各変換は、正確な変換である請求項1から13のいずれかに記載の方法(800)。
【請求項15】
各イメージは、各々が身体部分の対応する基本的な領域を表す、多数の視覚化の要素を含み、各動画に対し、この方法は、区切りマスクの外にある最適化された変換に基づいて変換された動画の各々の視覚化する要素を廃棄するステップ(852,856)を更に含む請求項1から14のいずれかに記載の方法(800)。
【請求項16】
要素が少なくとも動画の1つにおいて廃棄される各々の視覚化要素を廃棄することにより、各イメージを低減するステップ(860-862)および、低減されたイメージに基づき、分析の結果を決定するステップ(870)を更に備える請求項15に記載の方法(800)。
【請求項17】
シーケンス内の最も激しいイメージと最も激しくないイメージを特定するステップ(866)と、
各基本的な領域に対し、最も激しいイメージ内の対応する視覚化像要素と、最も激しくないイメージ内の対応する視覚化像要素との差を計算するステップ(867)と、および
対応する差がしきい値より低いなら、すべてのイメージ内の基本的な領域に対する視覚化要素を廃棄するステップ(868)とを更に含む請求項16に記載の方法(800)。
【請求項18】
各イメージ(905)は、各々が身体部分の対応する部分を示す複数のフレーム(905a-905c)、区切りマスクおよび、参照イメージの少なくとも2つのフレーム上に定義される特徴マスクを含む請求項1から17のいずれかに記載の方法(800)。
【請求項19】
それぞれのイメージは身体部分の超音波応答を表す請求項1から18のいずれかに記載の方法(800)。
【請求項20】
分析は身体部分での造影剤の潅流の査定から成る請求項1から19のいずれかに記載の方法(800)。
【請求項21】
コンピュータプログラムがデータ処理システム(105)で実行されたとき、請求項1から20のいずれかに記載の方法(800)を実行するコンピュータプログラム。
【請求項22】
コンピュータプログラムを具体化したコンピュータ利用が可能な媒体を含むコンピュータプログラム製品であり、データ処理システム上で実行された時、そのコンピュータプログラムは、請求項1から20のいずれかに基づく方法をシステムに実行させることを特徴とするコンピュータプログラム製品。
【請求項23】
請求項1から20のいずれかに基づく方法のステップを実行するための手段(200)を含むイメージ登録装置(105)。
【請求項24】
請求項23に基づく登録装置(105)およびイメージのシーケンスを取得するための手段(110)を含む画像診断システム(100)。
【図1】

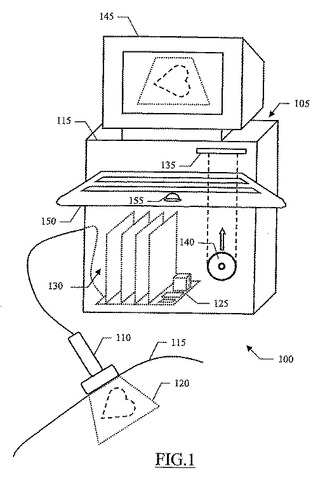
【図2a】
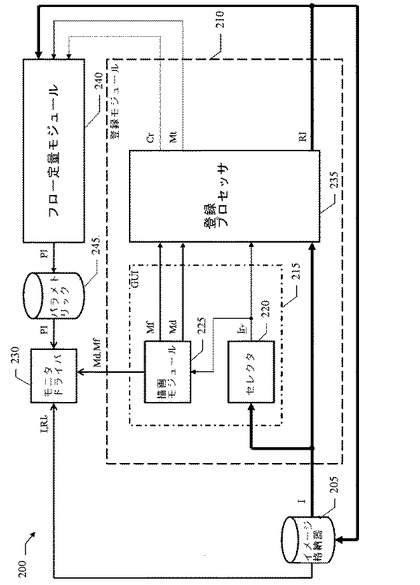
【図2b】
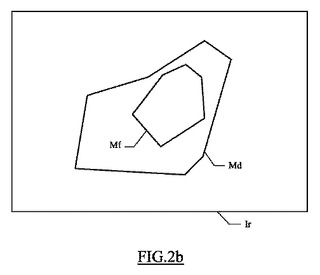
【図3】
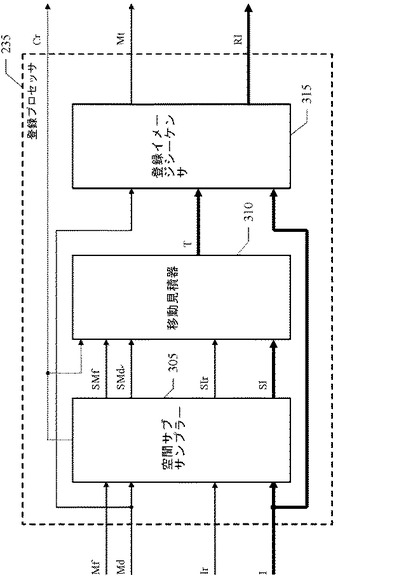
【図4a】
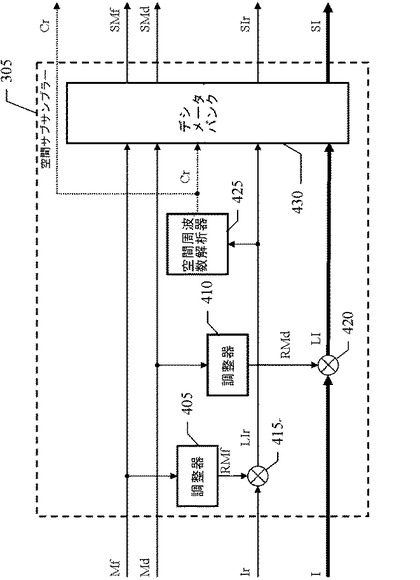
【図4b】
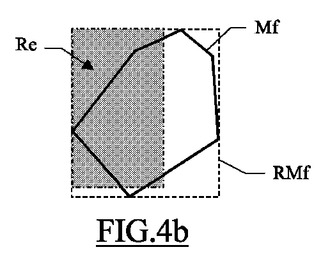
【図4c】
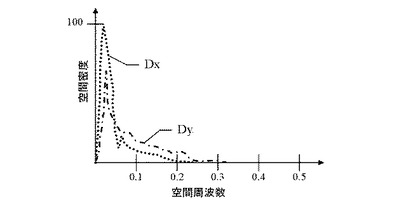
【図4d】
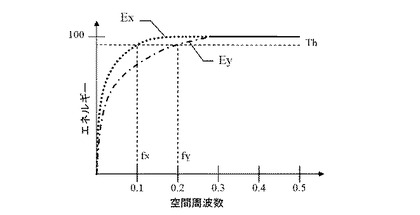
【図5a】
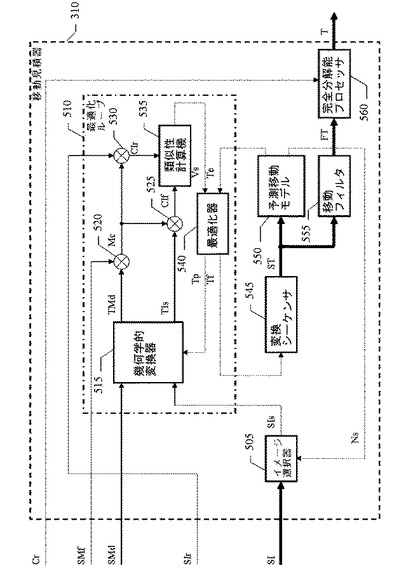
【図5b】
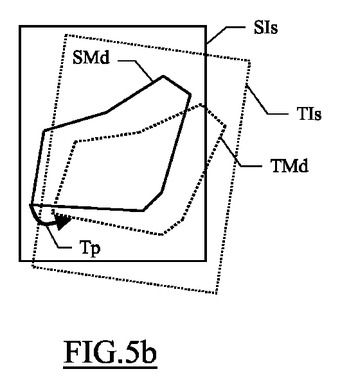
【図5c】
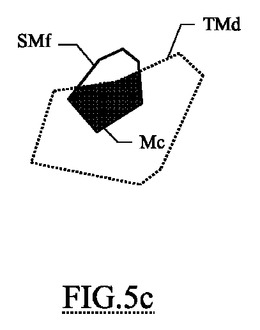
【図5d】
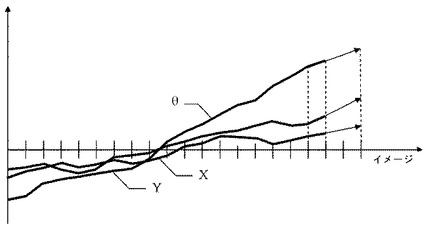
【図6a】
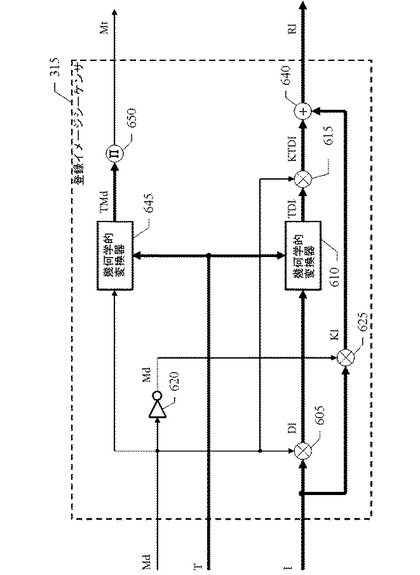
【図6b】
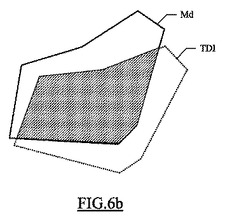
【図6c】
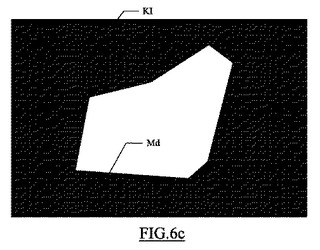
【図6d】
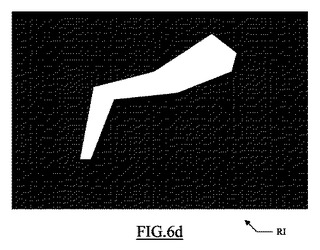
【図6e】
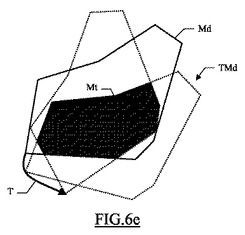
【図7】
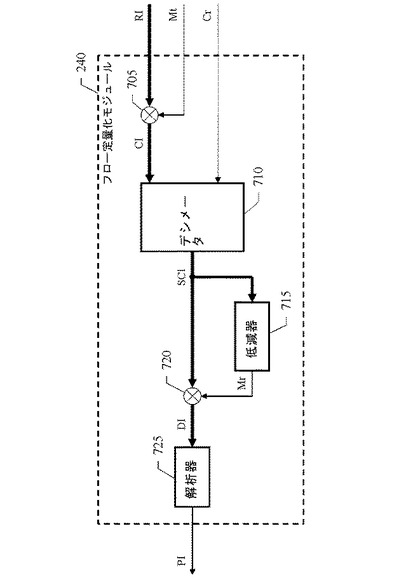
【図8a】
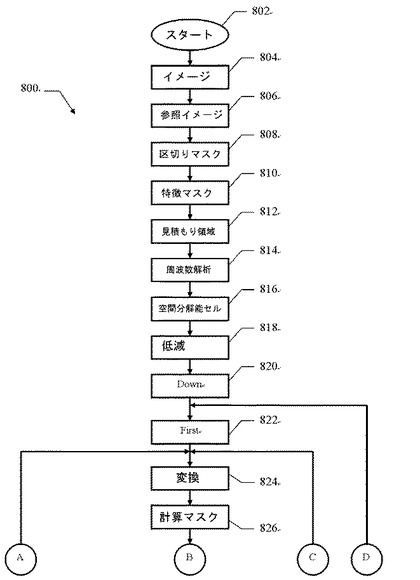
【図8b】
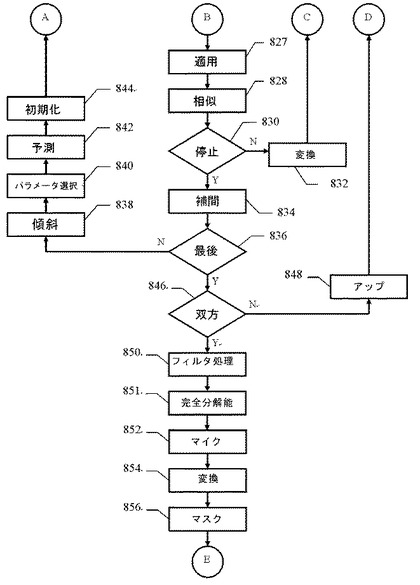
【図8c】
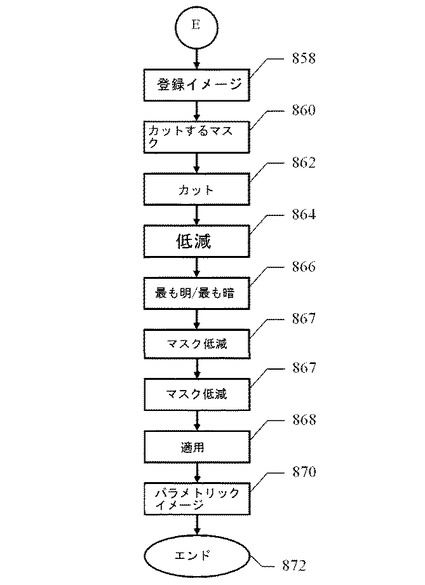
【図9】
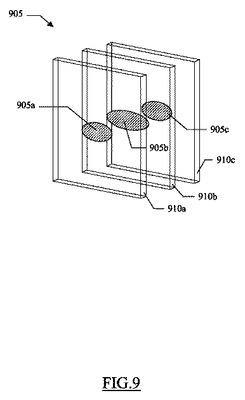
【図10a】
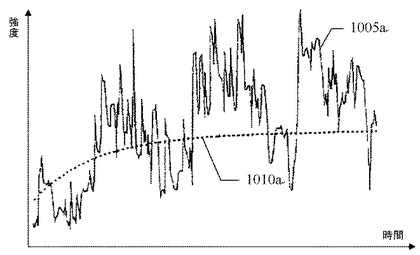
【図10b】
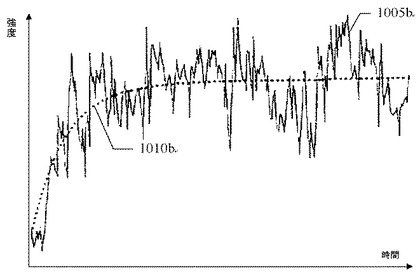
【図2a】
【図2b】
【図3】
【図4a】
【図4b】
【図4c】
【図4d】
【図5a】
【図5b】
【図5c】
【図5d】
【図6a】
【図6b】
【図6c】
【図6d】
【図6e】
【図7】
【図8a】
【図8b】
【図8c】
【図9】
【図10a】
【図10b】
【公表番号】特表2008−508972(P2008−508972A)
【公表日】平成20年3月27日(2008.3.27)
【国際特許分類】
【出願番号】特願2007−525294(P2007−525294)
【出願日】平成17年8月5日(2005.8.5)
【国際出願番号】PCT/EP2005/053871
【国際公開番号】WO2006/015971
【国際公開日】平成18年2月16日(2006.2.16)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.フロッピー
【出願人】(398063065)ブラッコ・リサーチ・ソシエテ・アノニム (13)
【氏名又は名称原語表記】BRACCO RESEARCH S.A.
【Fターム(参考)】
【公表日】平成20年3月27日(2008.3.27)
【国際特許分類】
【出願日】平成17年8月5日(2005.8.5)
【国際出願番号】PCT/EP2005/053871
【国際公開番号】WO2006/015971
【国際公開日】平成18年2月16日(2006.2.16)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.フロッピー
【出願人】(398063065)ブラッコ・リサーチ・ソシエテ・アノニム (13)
【氏名又は名称原語表記】BRACCO RESEARCH S.A.
【Fターム(参考)】
[ Back to top ]