
複数の壁を持つ紙製パッケージおよび織物製パッケージの位置決め方法
本発明の方法および装置は、複数の壁を持つ大型パッケージまたはバッグ用に利用されるような供給コンベアを初段コンベアと主コンベアとの間で用いることに関連する。供給コンベアは、プログラマブル論理制御装置または同等の装置によって制御されるサーボ装置によって駆動される。パッケージまたはバッグが供給コンベアに補足されると、該パッケージまたはバッグの前縁が光電センサーによって検知される。該前縁位置はプログラマブル論理制御装置へフィードバックされ、適切なタイミングでパッケージまたはバッグを主コンベアに供給するために、供給コンベアの望ましい速度が演算される。プログラマブル論理制御装置は、そうした望ましい速度を達成するために、サーボ装置を制御する。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、パッケージまたはバッグ、特に複数の壁を持つ大型織物製パッケージまたはバッグを主コンベアのようなパッケージまたはバッグを処理する機械内に位置決めする独立の位置決め供給装置に関する。
【0002】
また、本願は、2008年11月18日に出願された米国仮出願第61/115,791号の優先権を主張し、その内容は本願と一体をなすものとして参照する。
【背景技術】
【0003】
再閉鎖可能なパッケージまたはバッグおよびその製造に関する従来技術は、その意図された目的に対して十分に開発され申し分ないものである。現在用いられている装置には、パッケージまたはバッグを主コンベアまたはニップローラーに供給するためにラグチェーンを採用し位置決めについてはフィードバックしない装置がある。位置決めは、ラグチェーンおよび主コンベアの速度を可及的に正確に制御することによってのみなされ、シワのような製品の欠陥については何ら考慮されていない。ラグチェーンは、バッグを後縁からベルトコンベアへ押圧するので、パッケージまたはバッグの前縁にはシワができ、ベルトコンベアでの位置決め誤差を生じる。
【0004】
再閉鎖可能な大型パッケージおよびその製造方法が、本願出願人により2007年3月26日出願の米国特許出願第11/728,477号「再閉鎖可能な大型パッケージ用高圧ジッパー組立体」、米国特許出願第11/728,405号「再閉鎖可能な大型パッケージ用高圧ジッパー組立体の製造方法」および米国特許出願第11/728,413号「種々の基体から成る大型バッグのジッパー組立体用ホットメルト接着剤塗布システム」に開示されている。同様に、大型パッケージの供給方法が、本願出願人により2008年8月13日出願の米国特許出願第11/891,697号「大型パッケージまたはバッグを再閉鎖可能なジッパー取付装置に供給する方法」に記載されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】米国特許出願第11/728,477号明細書
【特許文献2】米国特許出願第11/728,405号明細書
【特許文献3】米国特許出願第11/728,413号明細書
【特許文献4】米国特許出願第11/891,697号明細書
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明は、パッケージまたはバッグ、特に複数の壁を持つ大型織物製パッケージまたはバッグを主コンベアのようなパッケージまたはバッグを処理する機械内への位置決めを改善することを目的としている。
【課題を解決するための手段】
【0007】
この目的および他の目的は、独立の位置決め供給装置を用いることによって、複数の壁を持つ大型織物製パッケージまたはバッグを機械内に位置決めするようにした方法および装置によって達成される。パッケージまたはバッグを供給コンベアへ駆動するアタッチメントを有したチェーンによって、該パッケージまたはバッグはテーブル上に載置される。パッケージまたはバッグが供給コンベアに補足されると、該パッケージまたはバッグの前縁が光電センサーによって検知される。前縁位置はプログラマブル論理制御装置または同等のマイクロプロセッサーへフィードバックされ、サーボ制御のために演算され、それによって位置決め供給装置の速度が増減され、適切なタイミングでパッケージまたはバッグが主コンベアに供給される。
【図面の簡単な説明】
【0008】
【図1】本発明の実施形態の略図である。
【発明を実施するための形態】
【0009】
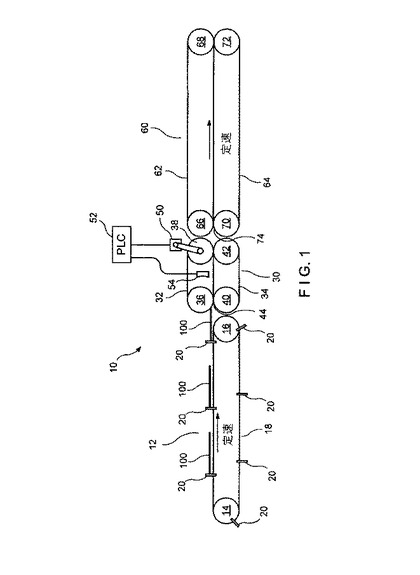
添付図面、特に図1を参照すると、本発明の実施形態による位置決め装置10が略示されている。
初段コンベア12が、両端に設けられたローラー14、16を含んでおり、該ローラー間にラグチェーン18(通常、初段コンベア12の各側縁に1つのラグチェーン)が張架されている。図1の配置では、ラグチェーン18およびローラー14、16は、通常、一定速度で時計回りの方向に動作している。ラグチェーン18には等間隔でラグ20が設けられており、該ラグは、一連のパッケージまたはバッグ100の後縁に係合する。パッケージまたはバッグ100は、通常、大型で複数の壁面から成る紙バッグまたは織物バッグである。パッケージ100に入れることのできる内容物としては、以下に限定されないが、チャコール、ペットフード、家畜その他の獣肉、猫用トイレ、肥料、種苗、植物、電球、岩塩、食品を含む。
【0010】
初段コンベア12は、一連のパッケージまたはバッグ100を供給コンベア30へ給送する。供給コンベア30は、上コンベアベルト32と下コンベアベルト34とを含む。上コンベアベルト32は、第1と第2の上ローラー36、38によって規定される経路を移動し、下コンベアベルト34は、第1と第2の下ローラー40、42によって規定される経路を移動する。上下コンベアベルト32、34が、第1の上ローラー36と第1の下ローラー40の間を通過する間、該上下コンベアベルト32、34の間にニップ44が形成される。上コンベアベルト32の下側ベルト部分と、下コンベアベルト34の上側ベルト部分は互いに接触していて、その間でパッケージまたはバッグ100と確実に係合して、処理の間にパッケージまたはバッグ100から一時的にシワが除去される。第2の上ローラー38は、サーボモーター50によって駆動されるように図示されているが、本開示から他のローラーを駆動するようにしてもよいことは当業者には理解されよう。上下コンベアベルト32、34が接触しているので、第2の上ローラー38は、上下コンベアベルト32、34およびローラー36、40、42と同じように動作する。サーボモーター50は、プログラマブル論理制御装置(または同様のマイクロコンピューターその他の演算装置)52によって制御される。プログラマブル論理制御装置52は光電センサー54からフィードバックされる情報を受取る。光電センサーは、パッケージまたはバッグ100が供給コンベア30に補足され該供給コンベア30を通過する間、該パッケージまたはバッグの前縁を検知する。この情報は、サーボモーター50による供給コンベア30の前記コンベアベルトおよびローラーの速度を調節(つまり、増減速)して、主コンベア60の作動特性によって求められる正確な或いは望ましい時にパッケージまたはバッグ100を主コンベア60に導入できるように、プログラマブル論理制御装置52によって用いられる。図1において、光電センサー54は上ベルト32によって形成されるループ内に設けるように図示されているが、本開示から当業者にはパッケージまたはバッグ100の前縁を正確に検知できる望ましい他の装置を想起することができよう。
【0011】
主コンベア(または次段コンベアその他同様の装置)60は、典型的に上下ベルト62、64を含んでいる。上ベルト62は、第1と第2の上ローラー66、68によって規定される経路を移動し、下ベルト64は、第1と第2の下ローラー70、72によって規定される経路を移動する。上下ベルト62、64が第1の上ローラー66と第1の下ローラー70との間を通過する際、上下ベルト62、64の間にニップ74が形成される。上ベルト62の下側ベルト部分と、下ベルト64の上側ベルト部分は互いに接触していて、その間でパッケージまたはバッグ100と確実にしっかりと係合する。上下ベルト62、64およびローラー66、68、70、72の速度は典型的に一定であり、初段コンベア12の速度と同じまたは異なる速度とすることができよう。
【0012】
上述のように供給コンベア30の速度を制御することによって、パッケージまたはバッグ100は適切なタイミングでニップ74に導入され、位置を制御して位置決めが改善される。この適切なタイミングは、主コンベア60の特定用途および機能によって変更することができ、本開示から当業者には理解されよう。
【0013】
本発明の更なる実施形態として、パッケージまたはバッグ100を直角に配置するために、2つの供給コンベアと、(パッケージまたはバッグ100の各側縁部に1つの)センサーとを設けることができよう。同様に、供給コンベアに替えて供給ローラーを用いることもできよう。
【0014】
こうして、一層効果的に既述した目的および利点を得ることができる。本発明の好ましい実施形態を開示し、詳細に説明したが、本発明は、決して該好ましい実施形態に限定されず、特許請求の範囲によって範囲が決定される。
【符号の説明】
【0015】
10 位置決め装置
12 初段コンベア
14 ローラー
16 ローラー
18 ラグチェーン
20 ラグ
30 供給コンベア
32 上コンベアベルト
34 下コンベアベルト
36 第1の上ローラー
38 第2の上ローラー
40 第1の下ローラー
42 第2の下ローラー
44 ニップ
50 サーボモーター
52 プログラマブル論理制御装置
54 光電センサー
60 主コンベア
62 上ベルト
64 下ベルト
66 第1の上ローラー
68 第2の上ローラー
70 第1の下ローラー
72 第2の下ローラー
74 ニップ
100 パッケージまたはバッグ
【技術分野】
【0001】
本発明は、パッケージまたはバッグ、特に複数の壁を持つ大型織物製パッケージまたはバッグを主コンベアのようなパッケージまたはバッグを処理する機械内に位置決めする独立の位置決め供給装置に関する。
【0002】
また、本願は、2008年11月18日に出願された米国仮出願第61/115,791号の優先権を主張し、その内容は本願と一体をなすものとして参照する。
【背景技術】
【0003】
再閉鎖可能なパッケージまたはバッグおよびその製造に関する従来技術は、その意図された目的に対して十分に開発され申し分ないものである。現在用いられている装置には、パッケージまたはバッグを主コンベアまたはニップローラーに供給するためにラグチェーンを採用し位置決めについてはフィードバックしない装置がある。位置決めは、ラグチェーンおよび主コンベアの速度を可及的に正確に制御することによってのみなされ、シワのような製品の欠陥については何ら考慮されていない。ラグチェーンは、バッグを後縁からベルトコンベアへ押圧するので、パッケージまたはバッグの前縁にはシワができ、ベルトコンベアでの位置決め誤差を生じる。
【0004】
再閉鎖可能な大型パッケージおよびその製造方法が、本願出願人により2007年3月26日出願の米国特許出願第11/728,477号「再閉鎖可能な大型パッケージ用高圧ジッパー組立体」、米国特許出願第11/728,405号「再閉鎖可能な大型パッケージ用高圧ジッパー組立体の製造方法」および米国特許出願第11/728,413号「種々の基体から成る大型バッグのジッパー組立体用ホットメルト接着剤塗布システム」に開示されている。同様に、大型パッケージの供給方法が、本願出願人により2008年8月13日出願の米国特許出願第11/891,697号「大型パッケージまたはバッグを再閉鎖可能なジッパー取付装置に供給する方法」に記載されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】米国特許出願第11/728,477号明細書
【特許文献2】米国特許出願第11/728,405号明細書
【特許文献3】米国特許出願第11/728,413号明細書
【特許文献4】米国特許出願第11/891,697号明細書
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明は、パッケージまたはバッグ、特に複数の壁を持つ大型織物製パッケージまたはバッグを主コンベアのようなパッケージまたはバッグを処理する機械内への位置決めを改善することを目的としている。
【課題を解決するための手段】
【0007】
この目的および他の目的は、独立の位置決め供給装置を用いることによって、複数の壁を持つ大型織物製パッケージまたはバッグを機械内に位置決めするようにした方法および装置によって達成される。パッケージまたはバッグを供給コンベアへ駆動するアタッチメントを有したチェーンによって、該パッケージまたはバッグはテーブル上に載置される。パッケージまたはバッグが供給コンベアに補足されると、該パッケージまたはバッグの前縁が光電センサーによって検知される。前縁位置はプログラマブル論理制御装置または同等のマイクロプロセッサーへフィードバックされ、サーボ制御のために演算され、それによって位置決め供給装置の速度が増減され、適切なタイミングでパッケージまたはバッグが主コンベアに供給される。
【図面の簡単な説明】
【0008】
【図1】本発明の実施形態の略図である。
【発明を実施するための形態】
【0009】
添付図面、特に図1を参照すると、本発明の実施形態による位置決め装置10が略示されている。
初段コンベア12が、両端に設けられたローラー14、16を含んでおり、該ローラー間にラグチェーン18(通常、初段コンベア12の各側縁に1つのラグチェーン)が張架されている。図1の配置では、ラグチェーン18およびローラー14、16は、通常、一定速度で時計回りの方向に動作している。ラグチェーン18には等間隔でラグ20が設けられており、該ラグは、一連のパッケージまたはバッグ100の後縁に係合する。パッケージまたはバッグ100は、通常、大型で複数の壁面から成る紙バッグまたは織物バッグである。パッケージ100に入れることのできる内容物としては、以下に限定されないが、チャコール、ペットフード、家畜その他の獣肉、猫用トイレ、肥料、種苗、植物、電球、岩塩、食品を含む。
【0010】
初段コンベア12は、一連のパッケージまたはバッグ100を供給コンベア30へ給送する。供給コンベア30は、上コンベアベルト32と下コンベアベルト34とを含む。上コンベアベルト32は、第1と第2の上ローラー36、38によって規定される経路を移動し、下コンベアベルト34は、第1と第2の下ローラー40、42によって規定される経路を移動する。上下コンベアベルト32、34が、第1の上ローラー36と第1の下ローラー40の間を通過する間、該上下コンベアベルト32、34の間にニップ44が形成される。上コンベアベルト32の下側ベルト部分と、下コンベアベルト34の上側ベルト部分は互いに接触していて、その間でパッケージまたはバッグ100と確実に係合して、処理の間にパッケージまたはバッグ100から一時的にシワが除去される。第2の上ローラー38は、サーボモーター50によって駆動されるように図示されているが、本開示から他のローラーを駆動するようにしてもよいことは当業者には理解されよう。上下コンベアベルト32、34が接触しているので、第2の上ローラー38は、上下コンベアベルト32、34およびローラー36、40、42と同じように動作する。サーボモーター50は、プログラマブル論理制御装置(または同様のマイクロコンピューターその他の演算装置)52によって制御される。プログラマブル論理制御装置52は光電センサー54からフィードバックされる情報を受取る。光電センサーは、パッケージまたはバッグ100が供給コンベア30に補足され該供給コンベア30を通過する間、該パッケージまたはバッグの前縁を検知する。この情報は、サーボモーター50による供給コンベア30の前記コンベアベルトおよびローラーの速度を調節(つまり、増減速)して、主コンベア60の作動特性によって求められる正確な或いは望ましい時にパッケージまたはバッグ100を主コンベア60に導入できるように、プログラマブル論理制御装置52によって用いられる。図1において、光電センサー54は上ベルト32によって形成されるループ内に設けるように図示されているが、本開示から当業者にはパッケージまたはバッグ100の前縁を正確に検知できる望ましい他の装置を想起することができよう。
【0011】
主コンベア(または次段コンベアその他同様の装置)60は、典型的に上下ベルト62、64を含んでいる。上ベルト62は、第1と第2の上ローラー66、68によって規定される経路を移動し、下ベルト64は、第1と第2の下ローラー70、72によって規定される経路を移動する。上下ベルト62、64が第1の上ローラー66と第1の下ローラー70との間を通過する際、上下ベルト62、64の間にニップ74が形成される。上ベルト62の下側ベルト部分と、下ベルト64の上側ベルト部分は互いに接触していて、その間でパッケージまたはバッグ100と確実にしっかりと係合する。上下ベルト62、64およびローラー66、68、70、72の速度は典型的に一定であり、初段コンベア12の速度と同じまたは異なる速度とすることができよう。
【0012】
上述のように供給コンベア30の速度を制御することによって、パッケージまたはバッグ100は適切なタイミングでニップ74に導入され、位置を制御して位置決めが改善される。この適切なタイミングは、主コンベア60の特定用途および機能によって変更することができ、本開示から当業者には理解されよう。
【0013】
本発明の更なる実施形態として、パッケージまたはバッグ100を直角に配置するために、2つの供給コンベアと、(パッケージまたはバッグ100の各側縁部に1つの)センサーとを設けることができよう。同様に、供給コンベアに替えて供給ローラーを用いることもできよう。
【0014】
こうして、一層効果的に既述した目的および利点を得ることができる。本発明の好ましい実施形態を開示し、詳細に説明したが、本発明は、決して該好ましい実施形態に限定されず、特許請求の範囲によって範囲が決定される。
【符号の説明】
【0015】
10 位置決め装置
12 初段コンベア
14 ローラー
16 ローラー
18 ラグチェーン
20 ラグ
30 供給コンベア
32 上コンベアベルト
34 下コンベアベルト
36 第1の上ローラー
38 第2の上ローラー
40 第1の下ローラー
42 第2の下ローラー
44 ニップ
50 サーボモーター
52 プログラマブル論理制御装置
54 光電センサー
60 主コンベア
62 上ベルト
64 下ベルト
66 第1の上ローラー
68 第2の上ローラー
70 第1の下ローラー
72 第2の下ローラー
74 ニップ
100 パッケージまたはバッグ
【特許請求の範囲】
【請求項1】
初段コンベアと、後段コンベアとの間で製品を移送する供給コンベアにおいて、
第1と第2の下ローラーの間で移動する下コンベアベルトと、
前記下コンベアベルトおよび前記第1と第2の下ローラーが応動するサーボと、
前記サーボの動作を制御するコンピューター装置と、
前記下コンベアベルトによって移送される製品の位置を検知し、位置情報を前記コンピューター装置に出力するセンサーとを具備し、
前記コンピューター装置が、製品の望ましい速度を演算し、前記サーボにデータを出力して、前記下コンベアベルトおよび前記第1と第2のローラーの速度を調節するようにした供給コンベア。
【請求項2】
前記コンベアは、パッケージまたはバッグを含む製品を輸送するように構成されている請求項1に記載の供給コンベア。
【請求項3】
第1と第2の上ローラーの間を移動する上コンベアベルトを更に具備する請求項2に記載の供給コンベア。
【請求項4】
前記上コンベアベルトの下側ベルト部分が下コンベアベルトの上側ベルト部分に係合し、以て上コンベアベルトと下ベルトベルトが等速で走行する請求項3に記載の供給コンベア。
【請求項5】
前記上コンベアベルトと下コンベアベルトの間にニップが形成される請求項4に記載の供給コンベア。
【請求項6】
前記ニップに前記製品が受け入れられる請求項5に記載の供給コンベア。
【請求項7】
前記第1と第2の上ローラーの一方、第1と第2の下ローラーおよび下コンベアベルトのサーボ装置が、上コンベアベルトとの接触によって駆動される請求項6に記載の供給コンベア。
【請求項8】
製品を受取る初段コンベアと、
前記初段コンベアから製品を受取る供給コンベアとを具備し、
前記供給コンベアが
第1と第2の下ローラーの間で移動する下コンベアベルトと、
前記下コンベアベルトおよび前記第1と第2の下ローラーが応動するサーボと、
前記サーボの動作を制御するコンピューター装置と、
前記下コンベアベルトによって移送される製品の位置を検知し、位置情報を前記コンピューター装置に出力するセンサーとを具備し、
前記コンピューター装置が、製品の望ましい速度を演算し、前記サーボにデータを出力して、前記下コンベアベルトおよび前記第1と第2のローラーの速度を調節するようにしたコンベア装置。
【請求項9】
前記初段コンベアおよび前記供給コンベアが、パッケージまたはバッグを含む製品を輸送するように構成されている請求項8に記載のコンベア装置。
【請求項10】
前記供給コンベアが第1と第2の上ローラーの間を移動する上コンベアベルトを更に具備する請求項9に記載のコンベア装置。
【請求項11】
前記上コンベアベルトの下側ベルト部分が下コンベアベルトの上側ベルト部分に係合し、以て上コンベアベルトと下ベルトベルトが等速で走行する請求項10に記載のコンベア装置。
【請求項12】
前記上コンベアベルトと下コンベアベルトの間にニップが形成される請求項11に記載のコンベア装置。
【請求項13】
前記ニップに前記製品が受け入れられる請求項12に記載のコンベア装置。
【請求項14】
前記第1と第2の上ローラーの一方、第1と第2の下ローラーおよび下コンベアベルトのサーボ装置が、上コンベアベルトとの接触によって駆動される請求項13に記載のコンベア装置。
【請求項15】
製品を受取る初段コンベアと、
前記初段コンベアから製品を受取る供給コンベアとを具備し、
前記供給コンベアが、
第1と第2の下ローラーの間で移動する下コンベアベルトと、
前記下コンベアベルトおよび前記第1と第2の下ローラーが応動するサーボと、
前記サーボの動作を制御するコンピューター装置と、
前記下コンベアベルトによって移送される製品の位置を検知し、位置情報を前記コンピューター装置に出力するセンサーとを具備し、
前記コンピューター装置が、製品の望ましい速度を演算し、前記サーボにデータを出力して、前記下コンベアベルトおよび前記第1と第2のローラーの速度を調節するようになっており、
更に、前記供給コンベアから製品を受取る次段コンベアを更に具備するコンベア装置。
【請求項16】
前記初段コンベア、前記供給コンベアおよび次段コンベアが、パッケージまたはバッグを含む製品を輸送するように構成されている請求項15に記載のコンベア装置。
【請求項17】
前記供給コンベアが第1と第2の上ローラーの間を移動する上コンベアベルトを更に具備する請求項16に記載のコンベア装置。
【請求項18】
前記上コンベアベルトの下側ベルト部分が下コンベアベルトの上側ベルト部分に係合し、以て上コンベアベルトと下ベルトベルトが等速で走行する請求項17に記載のコンベア装置。
【請求項19】
前記上コンベアベルトと下コンベアベルトの間にニップが形成され、ニップに前記初段コンベアから前記製品が受け入れられる請求項18に記載のコンベア装置。
【請求項20】
前記第1と第2の上ローラーの一方、第1と第2の下ローラーおよび下コンベアベルトのサーボ装置が、上コンベアベルトとの接触によって駆動される請求項19に記載のコンベア装置。
【請求項1】
初段コンベアと、後段コンベアとの間で製品を移送する供給コンベアにおいて、
第1と第2の下ローラーの間で移動する下コンベアベルトと、
前記下コンベアベルトおよび前記第1と第2の下ローラーが応動するサーボと、
前記サーボの動作を制御するコンピューター装置と、
前記下コンベアベルトによって移送される製品の位置を検知し、位置情報を前記コンピューター装置に出力するセンサーとを具備し、
前記コンピューター装置が、製品の望ましい速度を演算し、前記サーボにデータを出力して、前記下コンベアベルトおよび前記第1と第2のローラーの速度を調節するようにした供給コンベア。
【請求項2】
前記コンベアは、パッケージまたはバッグを含む製品を輸送するように構成されている請求項1に記載の供給コンベア。
【請求項3】
第1と第2の上ローラーの間を移動する上コンベアベルトを更に具備する請求項2に記載の供給コンベア。
【請求項4】
前記上コンベアベルトの下側ベルト部分が下コンベアベルトの上側ベルト部分に係合し、以て上コンベアベルトと下ベルトベルトが等速で走行する請求項3に記載の供給コンベア。
【請求項5】
前記上コンベアベルトと下コンベアベルトの間にニップが形成される請求項4に記載の供給コンベア。
【請求項6】
前記ニップに前記製品が受け入れられる請求項5に記載の供給コンベア。
【請求項7】
前記第1と第2の上ローラーの一方、第1と第2の下ローラーおよび下コンベアベルトのサーボ装置が、上コンベアベルトとの接触によって駆動される請求項6に記載の供給コンベア。
【請求項8】
製品を受取る初段コンベアと、
前記初段コンベアから製品を受取る供給コンベアとを具備し、
前記供給コンベアが
第1と第2の下ローラーの間で移動する下コンベアベルトと、
前記下コンベアベルトおよび前記第1と第2の下ローラーが応動するサーボと、
前記サーボの動作を制御するコンピューター装置と、
前記下コンベアベルトによって移送される製品の位置を検知し、位置情報を前記コンピューター装置に出力するセンサーとを具備し、
前記コンピューター装置が、製品の望ましい速度を演算し、前記サーボにデータを出力して、前記下コンベアベルトおよび前記第1と第2のローラーの速度を調節するようにしたコンベア装置。
【請求項9】
前記初段コンベアおよび前記供給コンベアが、パッケージまたはバッグを含む製品を輸送するように構成されている請求項8に記載のコンベア装置。
【請求項10】
前記供給コンベアが第1と第2の上ローラーの間を移動する上コンベアベルトを更に具備する請求項9に記載のコンベア装置。
【請求項11】
前記上コンベアベルトの下側ベルト部分が下コンベアベルトの上側ベルト部分に係合し、以て上コンベアベルトと下ベルトベルトが等速で走行する請求項10に記載のコンベア装置。
【請求項12】
前記上コンベアベルトと下コンベアベルトの間にニップが形成される請求項11に記載のコンベア装置。
【請求項13】
前記ニップに前記製品が受け入れられる請求項12に記載のコンベア装置。
【請求項14】
前記第1と第2の上ローラーの一方、第1と第2の下ローラーおよび下コンベアベルトのサーボ装置が、上コンベアベルトとの接触によって駆動される請求項13に記載のコンベア装置。
【請求項15】
製品を受取る初段コンベアと、
前記初段コンベアから製品を受取る供給コンベアとを具備し、
前記供給コンベアが、
第1と第2の下ローラーの間で移動する下コンベアベルトと、
前記下コンベアベルトおよび前記第1と第2の下ローラーが応動するサーボと、
前記サーボの動作を制御するコンピューター装置と、
前記下コンベアベルトによって移送される製品の位置を検知し、位置情報を前記コンピューター装置に出力するセンサーとを具備し、
前記コンピューター装置が、製品の望ましい速度を演算し、前記サーボにデータを出力して、前記下コンベアベルトおよび前記第1と第2のローラーの速度を調節するようになっており、
更に、前記供給コンベアから製品を受取る次段コンベアを更に具備するコンベア装置。
【請求項16】
前記初段コンベア、前記供給コンベアおよび次段コンベアが、パッケージまたはバッグを含む製品を輸送するように構成されている請求項15に記載のコンベア装置。
【請求項17】
前記供給コンベアが第1と第2の上ローラーの間を移動する上コンベアベルトを更に具備する請求項16に記載のコンベア装置。
【請求項18】
前記上コンベアベルトの下側ベルト部分が下コンベアベルトの上側ベルト部分に係合し、以て上コンベアベルトと下ベルトベルトが等速で走行する請求項17に記載のコンベア装置。
【請求項19】
前記上コンベアベルトと下コンベアベルトの間にニップが形成され、ニップに前記初段コンベアから前記製品が受け入れられる請求項18に記載のコンベア装置。
【請求項20】
前記第1と第2の上ローラーの一方、第1と第2の下ローラーおよび下コンベアベルトのサーボ装置が、上コンベアベルトとの接触によって駆動される請求項19に記載のコンベア装置。
【図1】

【公表番号】特表2012−509234(P2012−509234A)
【公表日】平成24年4月19日(2012.4.19)
【国際特許分類】
【出願番号】特願2011−536426(P2011−536426)
【出願日】平成21年11月11日(2009.11.11)
【国際出願番号】PCT/US2009/063956
【国際公開番号】WO2010/059470
【国際公開日】平成22年5月27日(2010.5.27)
【出願人】(591203428)イリノイ トゥール ワークス インコーポレイティド (309)
【Fターム(参考)】
【公表日】平成24年4月19日(2012.4.19)
【国際特許分類】
【出願日】平成21年11月11日(2009.11.11)
【国際出願番号】PCT/US2009/063956
【国際公開番号】WO2010/059470
【国際公開日】平成22年5月27日(2010.5.27)
【出願人】(591203428)イリノイ トゥール ワークス インコーポレイティド (309)
【Fターム(参考)】
[ Back to top ]