
複数の実質的に同一の呼吸を届けるベンチレータ
【発明の詳細な説明】
発明の背景 この発明は一般に医療用ベンチレータの分野に関するものであり、特に人工呼吸の間患者に与える気体の流れを制御するベンチレータに関するものである。
医療用ベンチレータは呼吸能力が損なわれている患者に人工呼吸を提供するために開発されてきた。典型的には、ベンチレータは気体の調圧源から患者に呼吸を届ける。吸入の間の患者への流れは流れ制御バルブにより統制される。流れ制御バルブが開くと、調圧気体は患者の肺へ導入される。流れ制御バルブが閉じて呼吸の吸入段階が終了した後で、患者の呼吸作用による気体は放出バルブを介して大気中に発散され、このバルブは吸入が完了された後で開きさらに次の吸入段階が始まる前に閉じる。
これまでのベンチレータは、ベンチレータが患者の自然な呼吸パターンに与える援助の程度が変えられ得るように、いくつかのモードで動作することが可能であった。或る極端な例では、呼吸が届けられかつ各呼吸の間その容積の気体が患者により受取られるときベンチレータが完全な制御をして、ベンチレータは充分に制御された換気を提供し得る。充分に制御されたモードでは、すべての流れのパラメータは患者に特有の要求に従ってオペレータにより設定される。予め定められた流れのパラメータは潮流量、すなわち各呼吸の間患者により吸入される気体の量、1分あたりの呼吸回数である呼吸速度、吸入の間に患者に届けられる気体の最大の流量である最高流量、および流量の時間に対するグラフでの曲線の形をした波形を含む。これらのパラメータのうち最も重要なものは潮流量であり、その理由は、患者の体格および年齢に従って潮流量はかなり変わり得るからである。したがって、充分に制御された換気モードはしばしば「量制御された」換気と呼ばれる。
他の極端な例では、ベンチレータは患者による「自然に起こる」呼吸を許容するようにプログラムされ得る。自然に起こる呼吸モードの間、呼吸速度、潮流量、および他の流れのパラメータは予め定められない。各呼吸の吸入および呼息段階は患者による労力に応答して始められる。「量制御される」モードと「自然に起こる呼吸」のモードとの間には、様々な程度の、ベンチレータにより援助された呼吸作用が利用できる。
これまでのベンチレータに関連する問題の1つは、量制御されたモードの間は予め定められた潮流量がいつ届けられたか、したがって流れの制御バルブがどの点で閉じられるべきかを決定するために吸入の間の流れの量を正確に測定することが極めて困難である、ということであった。米国特許番号第4,527,557号に記載されたもののようなこれまでのベンチレータは、所望の流れのパラメータに関する入力を受信しかつ流れ制御バルブの開閉を制御するためにこれら予め定められたパラメータを実際の流れの状態と比較する、マイクロコンピュータ・コントローラを利用している。
特に、米国特許番号第4,527,557号で開示されているベンチレータでは流量に関するコントローラへのフィードバックが流れ制御バルブの下流方向に位置決めされる流れ変換器により生じられる、「閉ループ」制御システムが利用されている。流れ変換器により測定されるような実際の流量はリアルタイムを基準としてコントローラにより予め定められた流量と比較される。これら2個のバルブの間に不一致があるならば、バルブはそれに従って開かれるかまたは閉じられる。各呼吸の間、マイクロコンピュータ・コントローラは測定された流量と増分的な時間間隔の長さの積を増分的に合計することにより届けられる気体の合計量を計算する。コントローラにより計算される量が予め定められた潮流量に等しいとき、流れ制御バルブは閉じられる。
このシステムはいくつかの欠点を有するが、最も著しいのは流れ変換器の信頼性のなさである。現在入手可能な流れ変換器は流れの状態の狭い範囲にわたってのみ正確な流れの測定を提供し得る、高価で壊れやすい機械である。さらに、実際の流量の変化と流れの変化を修正または補償するこのシステムの能力との間に遅延時間が現われる。その結果として、予め定められた潮流量と届けられた実際の潮流量との間にかなりの差が生じ得る。
米国特許番号第4,527,557号に開示されているもののようなこのシステムの閉ループサーボに関する別な問題は、この制御システムが複雑でシステムが安定するように設計することが困難である、ということである。不安定なシステムでは、流れの制御バルブが開かれて所望の最高流量の点に達すると、バルブが所望の流量を超えるにつれて流れは途切れ途切れで不規則となり、さらにバルブが安定することができるまで流量は変動する。
このように、予め定められた潮流量の呼吸を正確かつ首尾一貫して届け得る廉価なベンチレータが必要とされる。
発明の概要 この発明は患者に人工呼吸を提供するベンチレータである。吸入中の気体源から患者への気体の流れは流れ制御バルブにより調整される。バルブの位置またはバルブを介する実際の流量に関する制御手段へのフィードバックを必要とせずに、開ループを基準としてバルブを制御するための開ループ制御手段がまた提供される。有利には、この開ループ制御手段(以下「制御手段」と略す)は流れ変換器の必要を取り除き、したがってベンチレータの価格を減じかつその信頼性を増す。
好ましくは、流れ制御バルブの位置とバルブを介する流量との間に公知の所定の関係が存在する。バルブの下流方向での圧力のわずかな変化がバルブを介する流量に影響を与えないようにバルブを介する「チョークされた」流れの領域を設けることによりこのことは部分的に達成される。この結果として、呼吸が届けられる前に制御手段はバルブの所要の位置と患者に所望の潮流量の気体を届けるためにバルブが開いたままにされていなければならない時間の長さを決定し得る。
好ましい実施例では、このベンチレータは所望の潮流量を選択するための手段と可変な流量で患者に呼吸を届けるための手段とを含む。患者に所望の潮流量を届けるために必要とされる呼吸届け期間の長さを計算するための手段がまた提供される。この発明の特徴は呼吸届け期間が、呼吸の届け前に計算され、さらにその後の呼吸を患者に届けることを制御する際に反復して利用される、ということである。呼吸届け期間の長さはリアルタイムを基準としては決定されないので、制御手段は比較的簡単かつ廉価であり得る。さらに、呼吸届け期間は後の呼吸に対し反復され、したがって同じ呼吸が患者に届けられるように潮流量は一貫しかつ正確なままである。
この発明の別な面は、バルブの閉じた位置からの流量の最初の、非瞬間的な増加のせいで届けられない気体の量、およびバルブが閉じるときの流量の非瞬間的な減少のせいで届けられる気体の余分な量を補償するために呼吸届け期間の長さが調節される。好ましい実施例では、流れ制御バルブはステッパモータにより駆動され、さらに届けられない量の気体と余分な量の気体とはバルブが開いた位置および閉じた位置へ駆動されるときのステッパモータの上への傾斜および下への傾斜に起因する。ステッパモータの傾斜を補償することにより、届けられる実際の潮流量は予め定められた潮流量に対し正確に相関関係にされ得る。
このベンチレータは呼吸を届ける前に流れのプロファイルを発生するための手段をさらに含む。流れのプロファイルは複数の実質的に同一の後の呼吸が患者に届けられるパターンとして用いられる。流れのプロファイルは予め定められた最高流量および予め定められた潮流量に基づいて発生される。再び、流れのプロファイルは反復して用いられるので、ベンチレータは一貫した潮流量の呼吸を届ける。
好ましい一実施例では、流れのプロファイルは流れ制御バルブを駆動するステッパモータにより実行されるように一続きの段へと移される。ステッパモータの各段と結果として生じる流量の変化との間に公知の関係が存在する。したがって、流れのプロファイルは、患者に届けられる潮流量が確実に制御されることを可能にするバルブにより正確に実行され得る。
この流れ制御バルブはいくつかの付加的な特有の特徴を有する。好ましくは球体であるバルブ部材は、この球の半径方向の運動がバルブシートに球を適当に確実に据え付けることを可能にする、撓み性のある直線ワイヤに固定される。この特徴は各部材の不適当な整列または摩滅にもかかわらず球とバルブシートとの間の確実な、封止係合を可能にする。また、バルブを駆動するモータの軸は、誤動作の場合にバルブが自動的に閉じられるように、ばねにより偏倚される。これは出力の損失の場合に高圧の空気が連続して患者の肺へ強制されることを妨げ、さもなければバルブは無期限に開いた位置にあるままである。
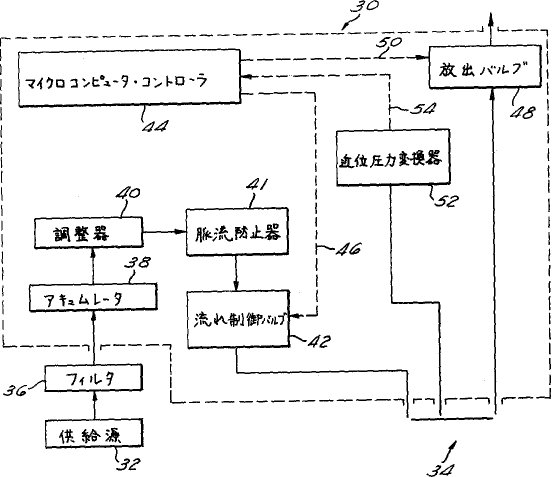
好ましい実施例の詳細な説明 第1図を参照すると、このベンチレータは一般に30で示されている。ベンチレータ30は空気または酸素混合物のような調圧気体を供給源32から受取り、人工呼吸を提供するように患者34への気体の流れを制御する。当業者には明らかとなるであろうように、概略図である第1図は検査バルブ、安全バルブ、圧力計などのような種々の普通に利用される要素を除去することにより簡略化されている。
第1図に例示されている構成要素およびそれらの動作の説明はベンチレータ30を介する気体の流れの経路に関する次の説明から理解されるであろう。気体は最初気体から液体と固体の双方を取り除くように供給源32から合体フィルタ36を通過する。ろ過された後で、気体は調圧気体の一時的貯蔵のための剛性チャンバであるアキュムレータ38に入る。アキュムレータ38は、患者による吸入の間のような、最高需要の期間中に気体が引出される貯蔵器として働く。空気調整器40はアキュムレータ38の下流方向に位置決めする。調整器40から流れる気体はおよそ1400g/cm2の一定の圧力で維持され、それはここでは「システム圧力」と呼ばれる。
システム圧力の気体は、アキュムレータ38と同様に剛性の気体貯蔵チャンバである、脈流防止器41へ入る。脈流防止器41の容積はアキュムレータ38の容積よりも小さく、脈流防止器41の気体の圧力はシステム圧力である。脈流防止器41は調整器40を通る流量が急激に変化するときに調整器40の応答時間が短いために生じる圧力の変動を補償する。
このように、脈流防止器41はシステム圧力を1400g/cm2で一定に維持するように働く。
脈流防止器41は流れ制御バルブ42へ気体を送り、その構造は下で最後に検討される。流れ制御バルブ42は吸入中に患者34へ届けられる気体の流量を調整する。流れ制御バルブ42は患者34への気体の種々の流量を許容するように、複数の位置をとり得る。流れ制御バルブ42の位置はマイクロコンピュータ・コントローラ44により制御される。電子信号46はコントローラ44により送られ、流れ制御バルブ42の開閉を引き起こす。下でより詳細に検討されるように、コントローラ44は、流れ制御バルブ42の適当な位置がどこであるべきかを決定するために、流れ制御バルブ42の下流方向の流れの状態に関するフィードバックを利用しない。このように、流れ制御バルブ42は「開ループ」を基準にして制御される。すなわち、コントローラ44は流れ制御バルブ42を開ループ制御する。
示されていないが、患者34は患者の肺とベンチレータ30との間の流体の伝達を確立する気管内チューブが取付けられる。公知のように、気管内チューブは、患者の気管または喉笛に挿入され、肺へ入りかつそこから出るすべての気体の流れが、流れ制御バルブ42と流体伝達をする気管内チューブを介して行なわれるように、気管で封止をする気球に取り囲まれる。
放出バルブ48は患者の肺と大気との間に流体の伝達を確立するように設けられる。開いているとき、放出バルブ48は患者34が気管内チューブを介し大気中へ呼吸作用による気体を発散することにより息を出すことを許容する。放出バルブ48の開閉は、放出バルブ48へ電子信号50を送って放出バルブ48の位置の変化をもたらす、コントローラ44により制御される。コントローラ44は近位圧力変換器52からのフィードバックに基づいて放出バルブ48の適当な位置を決定する。近位圧力変換器52は気管内チューブの気球により形成される封止のベンチレータ側の気体の圧力を測定する。このような加圧された気体はベンチレータに最も近い位置にあるため、「近位」気体と呼ばれる。コントローラ44へのフィードバックは近位圧力変換器52からの入力信号54の形式であり、それは近位圧力の電気的アナログ信号である。
ベンチレータ30が充分に制御されたモードで動作しており、患者34が流れのパラメータを抑制していないとき、流れ制御バルブ42がコントローラ44により開くように信号を与えられると吸入が始まる。流れ制御バルブ42の開放は気管内チューブを介し気体が患者の肺に入るようにする。放出バルブ48は吸入の間は閉じたままであり、そのため気管内チューブの気体は気体中へ漏れ出さない。コントローラ44からの指令に基づいて流れ制御バルブ42が閉じると、呼吸の吸入段階は終結する。
呼息段階は放出バルブ48の開放により始められ、そのタイミングはコントローラ44により決定される。放出バルブ48が開くと、患者の肺の中の気体は自動的に大気中に排出される。放出バルブ48は患者34が息を吐き出し終わった後で閉じる。ベンチレータ30は、オペレータか近位気体の圧力レベルが各呼吸の最後でいくらであるべきかを予め設定し得るように、正の呼息最終圧(PEEP)特性を含む。呼息の間、コントローラ44は実際の近位圧力を予め定められた圧力レベル(PEEP)と比較し、さらに近位圧力が予め定められたレベルに達すると、コントローラ44は信号50を送り、放出バルブ48が閉じた位置へ近づくようにする。次いでコントローラは、予め定められた圧力に等しい実際の近位圧力を維持するように閉ループを基準にして放出バルブ48の位置を「自動制御する」、または制御する。放出バルブ48が完全に閉じた後で、流れ制御バルブ42は呼息段階を終了しかつ次の吸入段階を開始するために開く。このサイクルは連続して反復され、人工呼吸を確立する。
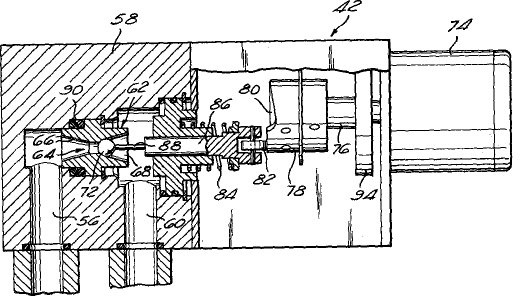
ここで第2図へ移ると、流れ制御バルブ42がより詳細に示されている。アキュムレータ38からの気体はバルブハウジング58のインレット流路56を介し流れ制御バルブ42へ入る。気体は流れ制御バルブ42を離れ、ハウジング58のアウトレット流路60を介し患者34へ向かう。バルブシート62はインレット56とアウトレット60との間に位置決めされる。開口64はバルブシート62を介して延在し、気体がインレット56からアウトレット60へ流れることを許容する。開口64はインレット56の側に収斂する円錐台状のノズル部分66と、さらにアウトレット60の側に末広がりの円錐台状のノズル部分68とを有する。
形状のバルブ部材または球72はバルブシート62の末広がり部分68の内に載せられる。流れ制御バルブ42は閉じた位置にあるように示されており、球72の外側の表面は開口64を介する流れを妨げるようにバルブシート62と封止係合している。流れ制御バルブ42の種々の位置、および流れ制御バルブ42を介する種々の流量はバルブシート62に関連する球72の変位により引き起こされる。これはそこを介して気体の流れが許容される開口64の面積を、したがって流れ制御バルブ42を介する流量を変える。そこを介して気体が流れる開口面積と球72の変位との間には実質的に比例関係が存在する。
流れ制御バルブ42の位置はステッパモータ74により変えられる。ステッパモータ74はコントローラ44からステッパモータの軸76の回転を引き起こす指令信号である電子信号46を受信する。軸76の端部にカム78が装設される。カム78は軸方向に面するカム表面80を含む。カムフォロワまたはローラ82はばね84により変位されてカム表面80と係合する。したがって、軸76とカム78との回転はローラ82がカム表面80の傾斜度に従うと、ローラ82の変位を引き起こす。
ローラ82の変位は長手の円筒状の心棒86により球72へ移される。心棒86は運動の直線軸に沿ってバルブシート62へ向かう方向かまたはそれから離れる方向のいずれかへ摺動可能である。ローラ82は心棒86の一方の端部で回転可能に装設される。心棒86の他方の端部で、球72が長手の撓み性のあるワイヤ88により心棒86に固定され、それは好ましくはステンレス鋼から形成されかつ直径がおよそ0.9mmである。
以上のようにして、ステッパモータの軸の回転によってバルブシート62に対する球72の位置が移動される。
ワイヤ88の縦方向の軸は実質的にワイヤ88および心棒86の運動の直線軸に平衡である。ワイヤ88が撓み性を有するため、ワイヤ88が運動の軸から外れることが可能になり、球72の半径方向の変位をもたらす。流れ制御バルブ42の動作時に、球72およびバルブシート62はしばしば整列しない状態となる。またいずれかの要素の摩滅のために、球72とバルブシート62との間で気密性のある封止係合をおこなうために球の半径方向の位置は変える必要がある。そのような不整列または摩滅を補償するために、ワイヤ88が球72の半径方向の位置を自動的に調節できるようにするのが好ましい。
バルブボディはバルブシート62と取巻くハウジング58との間に封止を形成する1対の弾性のOリング90に囲まれている。心棒86が流れ制御バルブ42の閉じた位置を越えて行き過ぎた場合に球72およびバルブシート62への損傷を防ぐために、Oリング90が圧縮してバルブシート62が多少移動しうる。
薄いメタリック片から形成される巻回状にされたばね94がステッパモータの軸76を取り囲む。ばね94は流れ制御バルブ42が閉じる方向へ回転するように軸76を偏倚する。通常の動作においては、ばね94が流れ制御バルブ42の位置に影響を与えないようにするために、ステッパモータ74はばね94により生じる偏倚トルクより大きな力を出力する。しかしながら、出力が低下した場合、ばね94は自動的に流れ制御バルブ42を閉じた位置へ偏倚する。これによって、そのような緊急の場合にシステム圧力の気体が患者の肺へ絶えず流されるようなことはない。図面には示されていないけれども、流れ制御バルブ42がばね94によって偏倚されて閉じた後で患者が周囲の空気を呼吸することが可能になるように、ベンチレータ30は安全バルブを含んでいる。
流れ制御バルブ42の構造は、流れ制御バルブ42の上流の安定した圧力状態およびバルブシート62内に確立される流れ状態のために、球72の位置と流れ制御バルブ42を介する気体の流量との間に公知の所定の関係が存在する。ステッパモータ74の各段は球72の一定量の変位を引き起こし、それは順に所定の流量の変化に対応する。この関係はベンチレータ30の動作中流れ制御バルブ42のすべての流れの状態に対し存在する。
流れ制御バルブ42を介する流れがそのように予測可能である主な理由は、バルブシート62内に「ソニック」フローまたは「チョークド」フローの領域が確立されるからである。公知のように、チョークドフローは開口の上流の絶対圧力に対するノズルまたは開口の下流の絶対圧力の比が0.528またはそれより小さいときに起こる。チョークドフロー状態が重要なのは、そこでは比率0.528を越えることはないため、開口の下流の圧力の変動は開口を介する流量が変わらないためである。したがって、下流または上流の圧力が比率0.528またはそれより低く維持されるならば、開口面積の変化は下流の流れの状態とは無関係に、流量の変化に対し正確に相関関係があるようにされ得る。
このベンチレータ30は、開口64の上流の圧力は定数1400g/cm2または絶対圧力でおよそ2440g/cm2で維持される。各呼吸の吸入段階の間、患者34への流量が供給源32からアキュムレータ38への気体の流量を超え得るように、呼息の間十分な気体がアキュムレータ38にストアされる。脈流防止器41は流れ制御バルブ42の上流の圧力を定数1400g/cm2に維持するように、調整器40と流れ制御バルブ42との間の緩衝器として働く。流れ制御バルブ42は、一定のシステム圧力を維持するために順に調整器40が迅速に応答するように強いる、気体の流量の非常に速い変化を引き起こすことができる。これら瞬間的な流れの状態の間、調整器40の限られた応答時間のために圧力の変動が起こる。脈流防止器41は少量の気体をストアし、これら圧力変動を最小にする。
開口64の下流で、圧力は患者の通気路を介する流れに対する抵抗および患者の肺の弾性すなわち「コンプライアンス」の関数である。肺のコンプライアンスが小さいほど、所与の量の気体で充満したときの肺にそれだけ多くの圧力が発生される。コンプライアンスの極めて小さい肺を有する成人で、正常な換気の間に肺の内部で確立するのが望ましい最大の背圧は約140g/cm2であることがわかっている。したがって、開口64の下流の圧力は常におよそ絶対圧力で1180g/cm2かまたはそれよりも小さい。絶対圧力の最大比は(1180g/cm2)/(2440g/cm2)すなわち約0.48であり、それはチョークドフローを維持するのに必要とされる最大比率0.528よりも小さい。
動作状態中の流れ制御バルブ42の中部でのチョークドフローの確立、流れ制御バルブ42の上流での公知のかつ一定の圧力レベル、および球72の変位と開口64の面積との間に存在する比例関係のせいで、流れ制御バルブ42のすべての位置に対する流量がわかる。流れ制御バルブ42はステッパモータ74によりディスクリートな増分的な段で動かされるので、ステッパモータ74の各段に対する流量の変化の間の関係がわかる。下でより詳細に検討されるように、コントローラ44は流れ制御バルブ42の位置を追跡し続け得るので、バルブの位置と流量の間の公知の所定の関係により、流量はコントローラ44にわかる。結果として、コントローラ44は開ループを基準として流れ制御バルブ42を制御し得る。
動作 或る動作のモードでは、ベンチレータ30は患者の呼吸を完全に制御する。ひどく無能力であるかまたは意識のない患者に対し普通用いられるこのモードでは、患者の呼吸の速度、1呼吸あたりの空気の量(潮流量)、および空気が届けられる流量はすべてベンチレータ30により制御される。
ベンチレータ30は、多数のスイッチ(示されていない)を含み、それによってオペレータは患者34に提供されるこの完全に制御されたベンチレータの所望の特性を選択することが可能になる、これらの特性は最高流量、潮流量、および呼吸の速度を含む。呼吸の速度は1分あたりの所望の回数の呼吸である。潮流量は各呼吸の間に患者に届けられる気体の合計量である。最高流量は各呼吸が届けられる気体の最大の流量である。
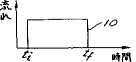
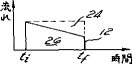
オペレータはまた時間の波形である呼吸のプロファイルを選択し得る。呼吸のプロファイルは時間に対する患者に届けられる所望流量と規定される。矩形の呼吸プロファイル10および先細りになった呼吸プロファイル12がそれぞれ第3A図および第3B図に例示されている。矩形の呼吸プロファイル10については、所望の流れは時間tiで瞬間的に零から最高流量へ増加し、時間tfで瞬間的に最高流量から零へ減少する。先細りになった呼吸プロファイル12に関しては、所望の流れは時間tiで瞬間的に最高流量へ増加し、時間tfで直線に沿って最高流量の2分の1へ徐々に減少し、その時点で流れは瞬間的に零へ減少する。
ベンチレータは流量を零から最高流量へ、およびその逆へ瞬間的に変えることができないので、ベンチレータはこれら呼吸のプロファイル10、12に厳密に従って呼吸を届けることができない。しかしながら、ベンチレータは理想化された呼吸プロファイル10、12に近い流れのプロファイルを届ける。流れのプロファイルは時間に対する患者へ届けられる実際の流量と規定される。第4図、第5図、および第6図は多数の流れのプロファイル14、16、18を例示している。第4図および第6図では、例示された流れのプロファイル14、18は矩形の呼吸プロファイルを有する呼吸に対応し、一方で第5図の流れのプロファイル16は先細りになった呼吸プロファイルを有する呼吸に対応する。流れのプロファイル14、16、18はかなり簡略化されており、ベンチレータの動作の説明を明確にするためにそのような簡略化された形式で提示されている。
通気特性がオペレータにより選択された後で、しかも患者34に対し通気を行なう前に、ベンチレータ30は選択された特性に基づいて複数の呼吸の流れのプロファイルがどのようなものであるかを決定し、さらに流れのプロファイルを利用して患者34に対する通気量を制御する。
この流れのプロファイルを決定する際に、コントローラ44は最初に、オペレータにより選択される最高流量に最も近接して対応するディスクリートな流量を提供するためにストッパモータ74が変位されなければならない段の数を決定する。上で検討されたように、ベンチレータの流れ制御バルブ42は多くのディスクリートな流量を届けることができる。結果として、オペレータにより選択された流量は流れ制御バルブ42により提供可能なディスクリートな流量のうちの1つに厳密には等しくなり得ないけれども、流れ制御バルブ42が多くのディスクリートな流量を届けることができるのでいずれの差も僅少となるであろう。
選択された最高流量に最も近接して対応するディスクリートな流量を提供するために必要とされる段の数は次の等式に従って決定される。
steps=INTEGER[FLOWRATE/VALVRATE+0.5]+CONSTANT, (1)
ここではFLOWRATEは選択された最高流量であり、VALVRATEは1段あたりの流れ制御バルブ42を介する気体の増分的な流れを表わす定数であり、INTEGERはオペランドのいずれかの端数も切り捨てる、関数であり、CONSTANTはバルブの閉位置に近い流れ制御バルブの非直線部分を補償するのに必要な予め定められた数の段を表わし、さらにSTEPSは選択された最高流量に最も近いディスクリートな流量に対応する必要な段数である。
INTEGER関数は、ステッパモータ74が整数の段数のみで変位が可能であるため使用される。INTEGER関数により切り捨てる前にFLOWRATE/VALVRATEの値に付加される0.5は、INTEGER関数が丸める代わりに切り捨てて最も近い整数にするために加えている。
ここで説明される実施例で利用される特定の流れ制御バルブ42では、VALVRATEは1段あたり1分につき1.000リットルであり、CONSTANTは3である。異なる流れ制御バルブが用いられると、VALVRATEおよびCONSTANTは異なる値をとり得る。
等式(1)は流れ制御バルブ42を介する気体の実際の流れと段の数との間の関係が比例であると仮定している。流れ制御バルブは等しい、一定量の増分を供給するものである。すなわち、バルブを増分的に開放すると同量だけ流量が増える。流れ制御バルブが比例しないとしても、そのようなバルブは増分的な開放することによって、公知の所定の流量を供給する。そのような非直線流量バルブはこの実施例と関連して利用され得る。
非直線流量バルブが用いられるならば、等式(1)を利用する代わりに、選択された最高流量に際も近いディスクリートな流量に対応する段の数を得るためにソフトウェアのルックアップ・テーブルが与えられる。そのようなソフトウェアのルックアップ・テーブルは、選択された最高流量に最も近い実際の流量が対応する段数とともにそのテーブルから検索され得るように、流れ制御バルブの各増分的な開放によって届けられる実際の流量を有している。このようにルックアップテーブルは、流れのプロファイルに関するデータを記憶する記憶手段となる。
最も近接したディスクリートな流れを提供するために必要な段の数を決定した後で実際の流量が決定され、そのため患者34に届けられる実際の潮流量はオペレータにより選択された潮流量に等しいようにされ得る。
等式(1)に従って決定された段の数から実際の流れを計算するために、流れが段の数に関して比例である次の等式が用いられる。
FLOW=(STEPS−CONSTANT)×(VALVRATE), (2)
ここではSTEPSは所望の流れに最も近い実際のディスクリートな流れを生じるであろう、等式(1)で計算された段の数であり、CONSTANTは流れ制御バルブの比例しない部分を補償するために用いられる数であり、VALVRATEは1段あたりの流れ制御バルブ42を通る増分的な流れを表わす定数であり、さらにFLOWは実際の流量である。
流れ制御バルブ42により供給される流量が段の数に比例しないならば、段の数から実際の流量を得るために上で説明されたソフトウェアのルックアップ・テーブルが利用され得る。この場合、ディスクリートな実際の流量の各々と選択された最高流量を比例して、単に最も近い実際の流量に対応する段の数を検索するだけでなく、実際の流量も同様に検索される。
段の数および対応する実際の最高流量が決定された後で、コントローラ44は呼吸が患者34に届けられる時間の長さを決定する呼吸届け期間を決定する。
一般に、呼吸届け時間は、一回の呼吸の期間がどれぐらいの長さであるべきかを決定するために利用される任意の時間、と大雑把に規定される。呼吸届け期間が大雑把に規定される一方で、説明された実施例のベンチレータ30の説明を助けるために特定の一規定が下で明らかにされる。
ベンチレータ30の重要な特徴は実質的にはオペレータにより予め選択された潮流量に等しい実際の潮流量を患者34へ届けることに向けられている。そのような正確な実際の潮流量を届けることは呼吸届け期間の大きさを調節することにより達成される。
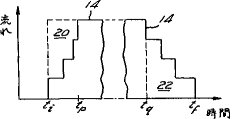
オペレータにより選択された潮流量を届けるのに必要な呼吸届け期間を決定する1つの簡単な方法は、等式(1)に従って決定される実際の最高流量で予め定められた潮流量を除算することであろう。この簡単な方法は流量が呼吸の初めで瞬間的に最高流量へ増加され、呼吸の終りで瞬間的に減少されることを仮定している。しかしながら、流れ制御バルブ42は瞬間的に開かれ得ないので、呼吸の最初の部分の間に届けられる実際の量は理想とされる方法により予期される量よりも幾分少ない。この容積の差は未届け量と呼ばれ、呼吸の最初の部分間の流量の増加の間に失なわれるものであろう。また、流れ制御バルブ42は呼吸の最後で瞬間的に閉じられないので、この簡単な方法によっては考慮に入れられない、届けられた余分な量が存在する。第4図では、失なわれる未届け量は点線により境界を規定された区域20に対応し、届けられる余分な量は点線により境界を規定された区域22に対応する。流れ制御バルブ42は同一速度で開閉され得ないので、失なわれた未届け量は届けられた余分な量に等しくなり得ず、そのため届けられた実際の量は予め選択された潮流量と等しくならないであろう。この容積の誤差を説明するために、コントローラ44は、届けられる実際の量が予め選択された潮流量に実質的に等しくなるように、呼吸届け期間を調節する。
次の検討をするために、呼吸届け期間は、流量が迅速に増加する呼吸の最初の部分と呼吸の最後の部分の間の流れの迅速な減少のちょうど前の、呼吸の中間部分とを含むが、呼吸のこの最後の部分は除外する、と規定される。したがって、第4図および第5図では、呼吸届け期間は時間tiで始まり、時間tqで終わる。呼吸届け期間はベンチレータの動作を説明するためだけにこの態様で厳密に規定される。
呼吸届け期間は次の等式に従って決定される。
BDP=(VX+VOLUME−VY)/FLOW, (3)
ここではVXはバルブが開いている間に失なわれる未届けの量であり、VYはバルブの閉じている間に届けられる余分の量であり、VOLUMEは選択された潮流量であり、FLOWは予め選択された流量に最も近接した実際の流量であり、さらにBDPは呼吸届け期間である。
したがって、等式(3)からわかるように、失なわれる未届け量VXが届けられる余分の量VYよりも多ければ、呼吸届け期間はこの差を説明するために増加される。失なわれる未届け量VXが届けられる余分の量VYより少ないならば、呼吸届け達期間はこの差を調節するために短縮される。たまたま、届けられる余分の量が失なわれる未届け量に厳密に等しければ、呼吸届け期間は変えられない。このように、この態様での呼吸届け期間の調節は、届けられる実際の量が実質的に予め選択された潮流量に等しくなることを確実にする。
ソフトウェアのルックアップ・テーブルにストアされる、失なわれる未届け量および届けられる余分の量は時間と流れの積の合計と算定され得て、時間と流れの積は流れ制御バルブの増分的な開放のうちの1つで届けられる実際の流れとその増分的な開放に対しバルブが開けられる時間の長さとの積と算定される量として規定される。特に、失なわれる未届け量は次の等式に従って決定される。

ここではFLOWは実際の最高の流れであり、Anはそのn番目の増分的な位置で流れ制御バルブにより届けられる実際の流れであり、tnは流れ制御バルブがn番目の位置にある時間の量であり、さらにVXは失なわれる未届け量である。
流れ制御バルブ42の閉鎖中に届けられる余分の量は次の等式に従って決定される。
ここではAnはそのn番目の増分的な位置で流れ制御バルブにより届けられる実際の流れであり、tnは流れ制御バルブ42がn番目の位置にある時間の量であり、さらにVYは呼吸の最後の部分の間で流れ制御バルブ42が閉じている間に届けられる余分の量である。
複数個の、時間と流れの積の合計として、届けられる余分の量と失なわれる未届け量とを計算する代わりに、これら量はまた容積を直接測定することにより実験的に決定され得る。どのようにしてそれらが決定されるかということと無関係に、これら量はソフトウェアのルックアップ・テーブルにストアされる。ルックアップ・テーブルは流れ制御バルブの各実際の最高の流れの位置に対する合計の累積的な、失なわれる未届け量および届けられる余分の量を提供する。
コントローラ44は流れ制御バルブのステッパモータに対して従来の上り傾斜プロファイルおよび下り傾斜プロファイルの特性で制御するステッパモータ74に対する上り傾斜プロファイルはモータ74が加速する速度を決定し、さらに下り傾斜のプロファイルはモータが減速する速度を決定する。傾斜プロファイルの各々は、本質的に一連の遅延時間要素を含み、この遅延時間によってステッパモータが出力を与えられる速度が決まる。7個の異なる組の上り傾斜のプロファイルおよび下り傾斜のプロファイルが提供される。(1)流れ制御バルブ42が動かされて開閉される方向、(2)ステッパモータ74が流れ制御バルブ42をその所望の位置へ動かすために変位されなければならない段の数によって、7個の組のうち1個が選択されて、ステッパモータ74を駆動する。方向によって異なる傾斜のプロファイルの組が選ばれる。上記したように、流れ制御バルブ42はばねにより偏倚されて閉じられるため、これによってステッパモータ74が加速または減速され得る速度に影響を及ぼす。したがって、流れ制御バルブ42が開いているならば、ステッパモータ74はばね84の力より大きな力を出力しなければならないので、よりゆっくりと加速されねばならず、一方バルブが閉じているならば、ステッパモータ74はより迅速に加速され得る。ステッパモータ74の移動時間を最小にするために異なる傾斜のプロファイルの組は段の数に基づいて与えられる。たとえば、所望のバルブの位置が現在のバルブの位置から100段離れているならば、特定の傾斜プロファイルの組が利用される。所望のバルブの位置がわずか20段しか離れていなければ、異なる傾斜のプロファイルの組が利用される。傾斜のプロファイルは従来の公知の方法で開発される。上で説明したような方向および距離に加えて、傾斜のプロファイルに関連する特定の時間の遅延は、使用されるステッパモータ74およびステッパモータ74と流れ制御バルブ42との間の結合された重量および摩擦によって変化する。全部で合計14個の傾斜プロファイルを有する傾斜プロファイルの7個の組がAppendix Aでリスト化されている。
ベンチレータは患者に複数の呼吸の各々を届けるために、選択された最高流量に最も近いディスクリートな流量を届けるのに必要とされる、ステッパモータの傾斜のプロファイル、呼吸届け期間、および段の数を利用する。各呼吸は同じ予め定められた傾斜のプロファイル、呼吸届け期間、および段の数に基づいているので、各呼吸は実質的に同一の流れのプロファイルを有する。さらに、各呼吸の潮流量は、呼吸届け期間が調節されて流量の可変性を保証するので、予め定められた潮流量に実質的に同一である。
ここで第4図を参照すると、矩形のプロファイルで呼吸を届ける際には、ベンチレータは上への傾斜のプロファイルと下への傾斜のプロファイルとからなる特定の傾斜のプロファイルの組を選択する。次いで、ベンチレータは選択された上への傾斜のプロファイルに従ってステッパモータ74を加速し、時間tiで流れを届け始める。ステッパモータ74は選択された下への傾斜のプロファイルに従って減速され、遂にはステッパモータ74は時間tpで選択された最高の流れに最も近接するディスクリートな流れに対応する、等式(1)で予め定められた段に達する。ステッパモータ74が傾斜のプロファイルに従って段きざみされて時間tfで流れ制御バルブが完全に閉じられるまでそれを徐々に閉じていく後の時間tqまで、流れは実質的に一定のままである。より具体的に言うと、時間tqでステッパモータ74は選択された上への傾斜のプロファイルに従って加速され、方向が異なるのでそれは時間tiで流れ制御バルブ42を開くために用いられるプロファイルとは異なる。ステッパモータ74は次いで選択された下への傾斜のプロファイルに従って減速されるが、これもまたバルブの向きが変わっているので流れ制御バルブ42が時間tfで完全に閉じるまでは異なっている。
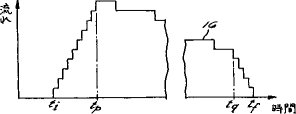
所望されるときには、ベンチレータ30はまた先細りになった呼吸のプロファイルを有する呼吸を届ける。ここで第5図を参照すると、このプロファイルを有する呼吸は、流れを零から最高流量へ迅速に増加し、最高流量を最高流量の2分の1に徐々に減少し、次に呼吸の最後の部分の間に流量を零に戻るように迅速に減じることにより届けられる。第5図に示される流れのプロファイル16は第3B図の先細りになった呼吸のプロファイル12の区分的線形近似である。
先細りになったプロファイルを有する複数の呼吸の届けは矩形のプロファイルを有する複数の呼吸を届けるのに必要とされる段以外にいくつかの付加的な予備的な段を必要とする。第1の呼吸届け期間が先細りになったプロファイルのために調節されなければならない。特に、ベンチレータが上で説明されたような選択された最高の流れの最も近接するディスクリートな流れおよび呼吸届け期間を与えるのに必要な段の数を決定した後で、呼吸が先細りになったプロファイルを有する必要があるならば、コントローラ44は呼吸の最初での最高流量を呼吸の最後で最高流量の2分の1へ徐々に減じるように調節をするために、3分の1だけ呼吸届け期間を増加する。ここで第3B図を参照すると、先細りになったプロファイルを有する呼吸で届けられる潮流量は同じ期間を有する矩形のプロファイルを有する呼吸の潮流量よりも点線の区域24に等しい面積だけ少ない。この点線の区域24は呼吸のプロファイル12の下部の区域26の3分の1に等しい。したがって、先細りになったプロファイル12を提供し、しかも同じ潮流量を届けるために、呼吸届け時間は先細りになったプロファイルを有する呼吸に対し3分の1だけ増加される。呼吸届け期間を増加するのに加えて、コントローラ44は先細りになったプロファイルを有する呼吸を届けるためにいくつかの他の段を実施する。コントローラ44は等式(1)で決定されたSTEPSの値を2で除算することにより最高流量の2分の1を届けるのに必要とされる段の数を決定する。
呼吸の中間部分の間に流量が最高流量から最高流量の2分の1へ徐々に減少する間に、コントローラ44は予め定められた時間間隔が通過するごとに1段だけ流れ制御バルブ42を閉じる。したがって、流れを最高流量から最高流量の2分の1へ徐々に減じるのに必要とされる時間間隔の数はそのために必要とされる段の数に等しい。
各時間間隔は等しい持続期間を有し、これは流れ制御バルブ42をその最高流量の位置から最高流量の2分の1の位置へ動かすのに必要とされる段の数で先細りになったプロファイルのための増加された呼吸を届ける期間を除算することにより決定される。時間間隔の持続期間が計算された後で、ベンチレータ30は先細りになったのプロファイルを有する呼吸を届け得る。
ここで第5図を参照すると、流れのプロファイル16は最初の時間tiでの流量を後の時間tpでの最高流量へ迅速に増加し、呼吸の中間部分の間の流量を時間tqで最高流量の2分の1へ徐々に減じてゆき、次に時間tfで流量を零まで迅速に減じることにより与えられる。呼吸の中間部分の間に流量を最高流量から最高流量の2分の1へ徐々に減じることは上で説明された間隔の各々が経過するときに流れ制御バルブ42を1段閉じることにより達成される。特に、時間tpで流量が最高流量に達するとすぐに、ベンチレータは時間tpの後で1段だけ流れ制御バルブを閉じる前に間隔の2分の1を待つ。その後で各全間隔が経過すると、流れ制御バルブ42は1段だけ閉じられ、遂に流量は最高流量の2分の1へ減少し、そのときコントローラ44は呼吸を終えるために流れ制御バルブ42を迅速に閉じる前に間隔の2分の1を待つ。
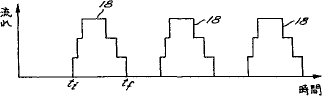
いずれかのプロファイルの1回の呼吸の届けを完了すると、ベンチレータ30は別な呼吸を届ける前に予め選択された呼吸速度に基づいて予め定められた時間の間待つ。ベンチレータ30により届けられる後の呼吸の各々はまた同じ最高流量、実際の流量、呼吸届け期間、および最初の呼吸を届けるために利用される傾斜のプロファイルに基づいており、それらのすべてが呼吸の届けの前に計算されていた。このように、呼吸の各々は同じ流れのプロファイルを有し、呼吸は実質的に同一であり、かつ第6図に示されるように実質的に同一の潮流量を有する。
【図面の簡単な説明】
第1図はこの発明の一実施例に従ったベンチレータの空気レイアウトの概略図である。
第2図はこの発明の一実施例に従った流れ制御バルブの部分的断面の側部正面図である。
第3A図は矩形の呼吸のプロファイルの例示である。
第3B図は先細りになった呼吸のプロファイルの例示である。
第4図は矩形のプロファイルを有する呼吸から中間部分が除去された、簡略化された流れのプロファイルの例示である。
第5図は先細りになったプロファイルを有する呼吸から中間部分が除去された、簡略化された流れのプロファイルの例示である。
第6図は個の簡略化された、実質的に同一の流れのプロファイルの例示である。
図において、30はベンチレータ、32は供給源、36は合着フィルタ、38はアキュムレータ、40は空気調整器、41は脈流防止器、42は流れ制御バルブ、44はマイクロコンピュータ・コントローラ、48は放出バルブ、52は近位圧力変換器、56はインレット経路、58はバルブハウジング、60はアウトレット流路、62はバルブシート、64は開口、72は球、74はステッパモータ、76はステッパモータの軸、78はカム、80はカム表面、82はローラ、84はばね、86は信号、88はワイヤである。
発明の背景 この発明は一般に医療用ベンチレータの分野に関するものであり、特に人工呼吸の間患者に与える気体の流れを制御するベンチレータに関するものである。
医療用ベンチレータは呼吸能力が損なわれている患者に人工呼吸を提供するために開発されてきた。典型的には、ベンチレータは気体の調圧源から患者に呼吸を届ける。吸入の間の患者への流れは流れ制御バルブにより統制される。流れ制御バルブが開くと、調圧気体は患者の肺へ導入される。流れ制御バルブが閉じて呼吸の吸入段階が終了した後で、患者の呼吸作用による気体は放出バルブを介して大気中に発散され、このバルブは吸入が完了された後で開きさらに次の吸入段階が始まる前に閉じる。
これまでのベンチレータは、ベンチレータが患者の自然な呼吸パターンに与える援助の程度が変えられ得るように、いくつかのモードで動作することが可能であった。或る極端な例では、呼吸が届けられかつ各呼吸の間その容積の気体が患者により受取られるときベンチレータが完全な制御をして、ベンチレータは充分に制御された換気を提供し得る。充分に制御されたモードでは、すべての流れのパラメータは患者に特有の要求に従ってオペレータにより設定される。予め定められた流れのパラメータは潮流量、すなわち各呼吸の間患者により吸入される気体の量、1分あたりの呼吸回数である呼吸速度、吸入の間に患者に届けられる気体の最大の流量である最高流量、および流量の時間に対するグラフでの曲線の形をした波形を含む。これらのパラメータのうち最も重要なものは潮流量であり、その理由は、患者の体格および年齢に従って潮流量はかなり変わり得るからである。したがって、充分に制御された換気モードはしばしば「量制御された」換気と呼ばれる。
他の極端な例では、ベンチレータは患者による「自然に起こる」呼吸を許容するようにプログラムされ得る。自然に起こる呼吸モードの間、呼吸速度、潮流量、および他の流れのパラメータは予め定められない。各呼吸の吸入および呼息段階は患者による労力に応答して始められる。「量制御される」モードと「自然に起こる呼吸」のモードとの間には、様々な程度の、ベンチレータにより援助された呼吸作用が利用できる。
これまでのベンチレータに関連する問題の1つは、量制御されたモードの間は予め定められた潮流量がいつ届けられたか、したがって流れの制御バルブがどの点で閉じられるべきかを決定するために吸入の間の流れの量を正確に測定することが極めて困難である、ということであった。米国特許番号第4,527,557号に記載されたもののようなこれまでのベンチレータは、所望の流れのパラメータに関する入力を受信しかつ流れ制御バルブの開閉を制御するためにこれら予め定められたパラメータを実際の流れの状態と比較する、マイクロコンピュータ・コントローラを利用している。
特に、米国特許番号第4,527,557号で開示されているベンチレータでは流量に関するコントローラへのフィードバックが流れ制御バルブの下流方向に位置決めされる流れ変換器により生じられる、「閉ループ」制御システムが利用されている。流れ変換器により測定されるような実際の流量はリアルタイムを基準としてコントローラにより予め定められた流量と比較される。これら2個のバルブの間に不一致があるならば、バルブはそれに従って開かれるかまたは閉じられる。各呼吸の間、マイクロコンピュータ・コントローラは測定された流量と増分的な時間間隔の長さの積を増分的に合計することにより届けられる気体の合計量を計算する。コントローラにより計算される量が予め定められた潮流量に等しいとき、流れ制御バルブは閉じられる。
このシステムはいくつかの欠点を有するが、最も著しいのは流れ変換器の信頼性のなさである。現在入手可能な流れ変換器は流れの状態の狭い範囲にわたってのみ正確な流れの測定を提供し得る、高価で壊れやすい機械である。さらに、実際の流量の変化と流れの変化を修正または補償するこのシステムの能力との間に遅延時間が現われる。その結果として、予め定められた潮流量と届けられた実際の潮流量との間にかなりの差が生じ得る。
米国特許番号第4,527,557号に開示されているもののようなこのシステムの閉ループサーボに関する別な問題は、この制御システムが複雑でシステムが安定するように設計することが困難である、ということである。不安定なシステムでは、流れの制御バルブが開かれて所望の最高流量の点に達すると、バルブが所望の流量を超えるにつれて流れは途切れ途切れで不規則となり、さらにバルブが安定することができるまで流量は変動する。
このように、予め定められた潮流量の呼吸を正確かつ首尾一貫して届け得る廉価なベンチレータが必要とされる。
発明の概要 この発明は患者に人工呼吸を提供するベンチレータである。吸入中の気体源から患者への気体の流れは流れ制御バルブにより調整される。バルブの位置またはバルブを介する実際の流量に関する制御手段へのフィードバックを必要とせずに、開ループを基準としてバルブを制御するための開ループ制御手段がまた提供される。有利には、この開ループ制御手段(以下「制御手段」と略す)は流れ変換器の必要を取り除き、したがってベンチレータの価格を減じかつその信頼性を増す。
好ましくは、流れ制御バルブの位置とバルブを介する流量との間に公知の所定の関係が存在する。バルブの下流方向での圧力のわずかな変化がバルブを介する流量に影響を与えないようにバルブを介する「チョークされた」流れの領域を設けることによりこのことは部分的に達成される。この結果として、呼吸が届けられる前に制御手段はバルブの所要の位置と患者に所望の潮流量の気体を届けるためにバルブが開いたままにされていなければならない時間の長さを決定し得る。
好ましい実施例では、このベンチレータは所望の潮流量を選択するための手段と可変な流量で患者に呼吸を届けるための手段とを含む。患者に所望の潮流量を届けるために必要とされる呼吸届け期間の長さを計算するための手段がまた提供される。この発明の特徴は呼吸届け期間が、呼吸の届け前に計算され、さらにその後の呼吸を患者に届けることを制御する際に反復して利用される、ということである。呼吸届け期間の長さはリアルタイムを基準としては決定されないので、制御手段は比較的簡単かつ廉価であり得る。さらに、呼吸届け期間は後の呼吸に対し反復され、したがって同じ呼吸が患者に届けられるように潮流量は一貫しかつ正確なままである。
この発明の別な面は、バルブの閉じた位置からの流量の最初の、非瞬間的な増加のせいで届けられない気体の量、およびバルブが閉じるときの流量の非瞬間的な減少のせいで届けられる気体の余分な量を補償するために呼吸届け期間の長さが調節される。好ましい実施例では、流れ制御バルブはステッパモータにより駆動され、さらに届けられない量の気体と余分な量の気体とはバルブが開いた位置および閉じた位置へ駆動されるときのステッパモータの上への傾斜および下への傾斜に起因する。ステッパモータの傾斜を補償することにより、届けられる実際の潮流量は予め定められた潮流量に対し正確に相関関係にされ得る。
このベンチレータは呼吸を届ける前に流れのプロファイルを発生するための手段をさらに含む。流れのプロファイルは複数の実質的に同一の後の呼吸が患者に届けられるパターンとして用いられる。流れのプロファイルは予め定められた最高流量および予め定められた潮流量に基づいて発生される。再び、流れのプロファイルは反復して用いられるので、ベンチレータは一貫した潮流量の呼吸を届ける。
好ましい一実施例では、流れのプロファイルは流れ制御バルブを駆動するステッパモータにより実行されるように一続きの段へと移される。ステッパモータの各段と結果として生じる流量の変化との間に公知の関係が存在する。したがって、流れのプロファイルは、患者に届けられる潮流量が確実に制御されることを可能にするバルブにより正確に実行され得る。
この流れ制御バルブはいくつかの付加的な特有の特徴を有する。好ましくは球体であるバルブ部材は、この球の半径方向の運動がバルブシートに球を適当に確実に据え付けることを可能にする、撓み性のある直線ワイヤに固定される。この特徴は各部材の不適当な整列または摩滅にもかかわらず球とバルブシートとの間の確実な、封止係合を可能にする。また、バルブを駆動するモータの軸は、誤動作の場合にバルブが自動的に閉じられるように、ばねにより偏倚される。これは出力の損失の場合に高圧の空気が連続して患者の肺へ強制されることを妨げ、さもなければバルブは無期限に開いた位置にあるままである。
好ましい実施例の詳細な説明 第1図を参照すると、このベンチレータは一般に30で示されている。ベンチレータ30は空気または酸素混合物のような調圧気体を供給源32から受取り、人工呼吸を提供するように患者34への気体の流れを制御する。当業者には明らかとなるであろうように、概略図である第1図は検査バルブ、安全バルブ、圧力計などのような種々の普通に利用される要素を除去することにより簡略化されている。
第1図に例示されている構成要素およびそれらの動作の説明はベンチレータ30を介する気体の流れの経路に関する次の説明から理解されるであろう。気体は最初気体から液体と固体の双方を取り除くように供給源32から合体フィルタ36を通過する。ろ過された後で、気体は調圧気体の一時的貯蔵のための剛性チャンバであるアキュムレータ38に入る。アキュムレータ38は、患者による吸入の間のような、最高需要の期間中に気体が引出される貯蔵器として働く。空気調整器40はアキュムレータ38の下流方向に位置決めする。調整器40から流れる気体はおよそ1400g/cm2の一定の圧力で維持され、それはここでは「システム圧力」と呼ばれる。
システム圧力の気体は、アキュムレータ38と同様に剛性の気体貯蔵チャンバである、脈流防止器41へ入る。脈流防止器41の容積はアキュムレータ38の容積よりも小さく、脈流防止器41の気体の圧力はシステム圧力である。脈流防止器41は調整器40を通る流量が急激に変化するときに調整器40の応答時間が短いために生じる圧力の変動を補償する。
このように、脈流防止器41はシステム圧力を1400g/cm2で一定に維持するように働く。
脈流防止器41は流れ制御バルブ42へ気体を送り、その構造は下で最後に検討される。流れ制御バルブ42は吸入中に患者34へ届けられる気体の流量を調整する。流れ制御バルブ42は患者34への気体の種々の流量を許容するように、複数の位置をとり得る。流れ制御バルブ42の位置はマイクロコンピュータ・コントローラ44により制御される。電子信号46はコントローラ44により送られ、流れ制御バルブ42の開閉を引き起こす。下でより詳細に検討されるように、コントローラ44は、流れ制御バルブ42の適当な位置がどこであるべきかを決定するために、流れ制御バルブ42の下流方向の流れの状態に関するフィードバックを利用しない。このように、流れ制御バルブ42は「開ループ」を基準にして制御される。すなわち、コントローラ44は流れ制御バルブ42を開ループ制御する。
示されていないが、患者34は患者の肺とベンチレータ30との間の流体の伝達を確立する気管内チューブが取付けられる。公知のように、気管内チューブは、患者の気管または喉笛に挿入され、肺へ入りかつそこから出るすべての気体の流れが、流れ制御バルブ42と流体伝達をする気管内チューブを介して行なわれるように、気管で封止をする気球に取り囲まれる。
放出バルブ48は患者の肺と大気との間に流体の伝達を確立するように設けられる。開いているとき、放出バルブ48は患者34が気管内チューブを介し大気中へ呼吸作用による気体を発散することにより息を出すことを許容する。放出バルブ48の開閉は、放出バルブ48へ電子信号50を送って放出バルブ48の位置の変化をもたらす、コントローラ44により制御される。コントローラ44は近位圧力変換器52からのフィードバックに基づいて放出バルブ48の適当な位置を決定する。近位圧力変換器52は気管内チューブの気球により形成される封止のベンチレータ側の気体の圧力を測定する。このような加圧された気体はベンチレータに最も近い位置にあるため、「近位」気体と呼ばれる。コントローラ44へのフィードバックは近位圧力変換器52からの入力信号54の形式であり、それは近位圧力の電気的アナログ信号である。
ベンチレータ30が充分に制御されたモードで動作しており、患者34が流れのパラメータを抑制していないとき、流れ制御バルブ42がコントローラ44により開くように信号を与えられると吸入が始まる。流れ制御バルブ42の開放は気管内チューブを介し気体が患者の肺に入るようにする。放出バルブ48は吸入の間は閉じたままであり、そのため気管内チューブの気体は気体中へ漏れ出さない。コントローラ44からの指令に基づいて流れ制御バルブ42が閉じると、呼吸の吸入段階は終結する。
呼息段階は放出バルブ48の開放により始められ、そのタイミングはコントローラ44により決定される。放出バルブ48が開くと、患者の肺の中の気体は自動的に大気中に排出される。放出バルブ48は患者34が息を吐き出し終わった後で閉じる。ベンチレータ30は、オペレータか近位気体の圧力レベルが各呼吸の最後でいくらであるべきかを予め設定し得るように、正の呼息最終圧(PEEP)特性を含む。呼息の間、コントローラ44は実際の近位圧力を予め定められた圧力レベル(PEEP)と比較し、さらに近位圧力が予め定められたレベルに達すると、コントローラ44は信号50を送り、放出バルブ48が閉じた位置へ近づくようにする。次いでコントローラは、予め定められた圧力に等しい実際の近位圧力を維持するように閉ループを基準にして放出バルブ48の位置を「自動制御する」、または制御する。放出バルブ48が完全に閉じた後で、流れ制御バルブ42は呼息段階を終了しかつ次の吸入段階を開始するために開く。このサイクルは連続して反復され、人工呼吸を確立する。
ここで第2図へ移ると、流れ制御バルブ42がより詳細に示されている。アキュムレータ38からの気体はバルブハウジング58のインレット流路56を介し流れ制御バルブ42へ入る。気体は流れ制御バルブ42を離れ、ハウジング58のアウトレット流路60を介し患者34へ向かう。バルブシート62はインレット56とアウトレット60との間に位置決めされる。開口64はバルブシート62を介して延在し、気体がインレット56からアウトレット60へ流れることを許容する。開口64はインレット56の側に収斂する円錐台状のノズル部分66と、さらにアウトレット60の側に末広がりの円錐台状のノズル部分68とを有する。
形状のバルブ部材または球72はバルブシート62の末広がり部分68の内に載せられる。流れ制御バルブ42は閉じた位置にあるように示されており、球72の外側の表面は開口64を介する流れを妨げるようにバルブシート62と封止係合している。流れ制御バルブ42の種々の位置、および流れ制御バルブ42を介する種々の流量はバルブシート62に関連する球72の変位により引き起こされる。これはそこを介して気体の流れが許容される開口64の面積を、したがって流れ制御バルブ42を介する流量を変える。そこを介して気体が流れる開口面積と球72の変位との間には実質的に比例関係が存在する。
流れ制御バルブ42の位置はステッパモータ74により変えられる。ステッパモータ74はコントローラ44からステッパモータの軸76の回転を引き起こす指令信号である電子信号46を受信する。軸76の端部にカム78が装設される。カム78は軸方向に面するカム表面80を含む。カムフォロワまたはローラ82はばね84により変位されてカム表面80と係合する。したがって、軸76とカム78との回転はローラ82がカム表面80の傾斜度に従うと、ローラ82の変位を引き起こす。
ローラ82の変位は長手の円筒状の心棒86により球72へ移される。心棒86は運動の直線軸に沿ってバルブシート62へ向かう方向かまたはそれから離れる方向のいずれかへ摺動可能である。ローラ82は心棒86の一方の端部で回転可能に装設される。心棒86の他方の端部で、球72が長手の撓み性のあるワイヤ88により心棒86に固定され、それは好ましくはステンレス鋼から形成されかつ直径がおよそ0.9mmである。
以上のようにして、ステッパモータの軸の回転によってバルブシート62に対する球72の位置が移動される。
ワイヤ88の縦方向の軸は実質的にワイヤ88および心棒86の運動の直線軸に平衡である。ワイヤ88が撓み性を有するため、ワイヤ88が運動の軸から外れることが可能になり、球72の半径方向の変位をもたらす。流れ制御バルブ42の動作時に、球72およびバルブシート62はしばしば整列しない状態となる。またいずれかの要素の摩滅のために、球72とバルブシート62との間で気密性のある封止係合をおこなうために球の半径方向の位置は変える必要がある。そのような不整列または摩滅を補償するために、ワイヤ88が球72の半径方向の位置を自動的に調節できるようにするのが好ましい。
バルブボディはバルブシート62と取巻くハウジング58との間に封止を形成する1対の弾性のOリング90に囲まれている。心棒86が流れ制御バルブ42の閉じた位置を越えて行き過ぎた場合に球72およびバルブシート62への損傷を防ぐために、Oリング90が圧縮してバルブシート62が多少移動しうる。
薄いメタリック片から形成される巻回状にされたばね94がステッパモータの軸76を取り囲む。ばね94は流れ制御バルブ42が閉じる方向へ回転するように軸76を偏倚する。通常の動作においては、ばね94が流れ制御バルブ42の位置に影響を与えないようにするために、ステッパモータ74はばね94により生じる偏倚トルクより大きな力を出力する。しかしながら、出力が低下した場合、ばね94は自動的に流れ制御バルブ42を閉じた位置へ偏倚する。これによって、そのような緊急の場合にシステム圧力の気体が患者の肺へ絶えず流されるようなことはない。図面には示されていないけれども、流れ制御バルブ42がばね94によって偏倚されて閉じた後で患者が周囲の空気を呼吸することが可能になるように、ベンチレータ30は安全バルブを含んでいる。
流れ制御バルブ42の構造は、流れ制御バルブ42の上流の安定した圧力状態およびバルブシート62内に確立される流れ状態のために、球72の位置と流れ制御バルブ42を介する気体の流量との間に公知の所定の関係が存在する。ステッパモータ74の各段は球72の一定量の変位を引き起こし、それは順に所定の流量の変化に対応する。この関係はベンチレータ30の動作中流れ制御バルブ42のすべての流れの状態に対し存在する。
流れ制御バルブ42を介する流れがそのように予測可能である主な理由は、バルブシート62内に「ソニック」フローまたは「チョークド」フローの領域が確立されるからである。公知のように、チョークドフローは開口の上流の絶対圧力に対するノズルまたは開口の下流の絶対圧力の比が0.528またはそれより小さいときに起こる。チョークドフロー状態が重要なのは、そこでは比率0.528を越えることはないため、開口の下流の圧力の変動は開口を介する流量が変わらないためである。したがって、下流または上流の圧力が比率0.528またはそれより低く維持されるならば、開口面積の変化は下流の流れの状態とは無関係に、流量の変化に対し正確に相関関係があるようにされ得る。
このベンチレータ30は、開口64の上流の圧力は定数1400g/cm2または絶対圧力でおよそ2440g/cm2で維持される。各呼吸の吸入段階の間、患者34への流量が供給源32からアキュムレータ38への気体の流量を超え得るように、呼息の間十分な気体がアキュムレータ38にストアされる。脈流防止器41は流れ制御バルブ42の上流の圧力を定数1400g/cm2に維持するように、調整器40と流れ制御バルブ42との間の緩衝器として働く。流れ制御バルブ42は、一定のシステム圧力を維持するために順に調整器40が迅速に応答するように強いる、気体の流量の非常に速い変化を引き起こすことができる。これら瞬間的な流れの状態の間、調整器40の限られた応答時間のために圧力の変動が起こる。脈流防止器41は少量の気体をストアし、これら圧力変動を最小にする。
開口64の下流で、圧力は患者の通気路を介する流れに対する抵抗および患者の肺の弾性すなわち「コンプライアンス」の関数である。肺のコンプライアンスが小さいほど、所与の量の気体で充満したときの肺にそれだけ多くの圧力が発生される。コンプライアンスの極めて小さい肺を有する成人で、正常な換気の間に肺の内部で確立するのが望ましい最大の背圧は約140g/cm2であることがわかっている。したがって、開口64の下流の圧力は常におよそ絶対圧力で1180g/cm2かまたはそれよりも小さい。絶対圧力の最大比は(1180g/cm2)/(2440g/cm2)すなわち約0.48であり、それはチョークドフローを維持するのに必要とされる最大比率0.528よりも小さい。
動作状態中の流れ制御バルブ42の中部でのチョークドフローの確立、流れ制御バルブ42の上流での公知のかつ一定の圧力レベル、および球72の変位と開口64の面積との間に存在する比例関係のせいで、流れ制御バルブ42のすべての位置に対する流量がわかる。流れ制御バルブ42はステッパモータ74によりディスクリートな増分的な段で動かされるので、ステッパモータ74の各段に対する流量の変化の間の関係がわかる。下でより詳細に検討されるように、コントローラ44は流れ制御バルブ42の位置を追跡し続け得るので、バルブの位置と流量の間の公知の所定の関係により、流量はコントローラ44にわかる。結果として、コントローラ44は開ループを基準として流れ制御バルブ42を制御し得る。
動作 或る動作のモードでは、ベンチレータ30は患者の呼吸を完全に制御する。ひどく無能力であるかまたは意識のない患者に対し普通用いられるこのモードでは、患者の呼吸の速度、1呼吸あたりの空気の量(潮流量)、および空気が届けられる流量はすべてベンチレータ30により制御される。
ベンチレータ30は、多数のスイッチ(示されていない)を含み、それによってオペレータは患者34に提供されるこの完全に制御されたベンチレータの所望の特性を選択することが可能になる、これらの特性は最高流量、潮流量、および呼吸の速度を含む。呼吸の速度は1分あたりの所望の回数の呼吸である。潮流量は各呼吸の間に患者に届けられる気体の合計量である。最高流量は各呼吸が届けられる気体の最大の流量である。
オペレータはまた時間の波形である呼吸のプロファイルを選択し得る。呼吸のプロファイルは時間に対する患者に届けられる所望流量と規定される。矩形の呼吸プロファイル10および先細りになった呼吸プロファイル12がそれぞれ第3A図および第3B図に例示されている。矩形の呼吸プロファイル10については、所望の流れは時間tiで瞬間的に零から最高流量へ増加し、時間tfで瞬間的に最高流量から零へ減少する。先細りになった呼吸プロファイル12に関しては、所望の流れは時間tiで瞬間的に最高流量へ増加し、時間tfで直線に沿って最高流量の2分の1へ徐々に減少し、その時点で流れは瞬間的に零へ減少する。
ベンチレータは流量を零から最高流量へ、およびその逆へ瞬間的に変えることができないので、ベンチレータはこれら呼吸のプロファイル10、12に厳密に従って呼吸を届けることができない。しかしながら、ベンチレータは理想化された呼吸プロファイル10、12に近い流れのプロファイルを届ける。流れのプロファイルは時間に対する患者へ届けられる実際の流量と規定される。第4図、第5図、および第6図は多数の流れのプロファイル14、16、18を例示している。第4図および第6図では、例示された流れのプロファイル14、18は矩形の呼吸プロファイルを有する呼吸に対応し、一方で第5図の流れのプロファイル16は先細りになった呼吸プロファイルを有する呼吸に対応する。流れのプロファイル14、16、18はかなり簡略化されており、ベンチレータの動作の説明を明確にするためにそのような簡略化された形式で提示されている。
通気特性がオペレータにより選択された後で、しかも患者34に対し通気を行なう前に、ベンチレータ30は選択された特性に基づいて複数の呼吸の流れのプロファイルがどのようなものであるかを決定し、さらに流れのプロファイルを利用して患者34に対する通気量を制御する。
この流れのプロファイルを決定する際に、コントローラ44は最初に、オペレータにより選択される最高流量に最も近接して対応するディスクリートな流量を提供するためにストッパモータ74が変位されなければならない段の数を決定する。上で検討されたように、ベンチレータの流れ制御バルブ42は多くのディスクリートな流量を届けることができる。結果として、オペレータにより選択された流量は流れ制御バルブ42により提供可能なディスクリートな流量のうちの1つに厳密には等しくなり得ないけれども、流れ制御バルブ42が多くのディスクリートな流量を届けることができるのでいずれの差も僅少となるであろう。
選択された最高流量に最も近接して対応するディスクリートな流量を提供するために必要とされる段の数は次の等式に従って決定される。
steps=INTEGER[FLOWRATE/VALVRATE+0.5]+CONSTANT, (1)
ここではFLOWRATEは選択された最高流量であり、VALVRATEは1段あたりの流れ制御バルブ42を介する気体の増分的な流れを表わす定数であり、INTEGERはオペランドのいずれかの端数も切り捨てる、関数であり、CONSTANTはバルブの閉位置に近い流れ制御バルブの非直線部分を補償するのに必要な予め定められた数の段を表わし、さらにSTEPSは選択された最高流量に最も近いディスクリートな流量に対応する必要な段数である。
INTEGER関数は、ステッパモータ74が整数の段数のみで変位が可能であるため使用される。INTEGER関数により切り捨てる前にFLOWRATE/VALVRATEの値に付加される0.5は、INTEGER関数が丸める代わりに切り捨てて最も近い整数にするために加えている。
ここで説明される実施例で利用される特定の流れ制御バルブ42では、VALVRATEは1段あたり1分につき1.000リットルであり、CONSTANTは3である。異なる流れ制御バルブが用いられると、VALVRATEおよびCONSTANTは異なる値をとり得る。
等式(1)は流れ制御バルブ42を介する気体の実際の流れと段の数との間の関係が比例であると仮定している。流れ制御バルブは等しい、一定量の増分を供給するものである。すなわち、バルブを増分的に開放すると同量だけ流量が増える。流れ制御バルブが比例しないとしても、そのようなバルブは増分的な開放することによって、公知の所定の流量を供給する。そのような非直線流量バルブはこの実施例と関連して利用され得る。
非直線流量バルブが用いられるならば、等式(1)を利用する代わりに、選択された最高流量に際も近いディスクリートな流量に対応する段の数を得るためにソフトウェアのルックアップ・テーブルが与えられる。そのようなソフトウェアのルックアップ・テーブルは、選択された最高流量に最も近い実際の流量が対応する段数とともにそのテーブルから検索され得るように、流れ制御バルブの各増分的な開放によって届けられる実際の流量を有している。このようにルックアップテーブルは、流れのプロファイルに関するデータを記憶する記憶手段となる。
最も近接したディスクリートな流れを提供するために必要な段の数を決定した後で実際の流量が決定され、そのため患者34に届けられる実際の潮流量はオペレータにより選択された潮流量に等しいようにされ得る。
等式(1)に従って決定された段の数から実際の流れを計算するために、流れが段の数に関して比例である次の等式が用いられる。
FLOW=(STEPS−CONSTANT)×(VALVRATE), (2)
ここではSTEPSは所望の流れに最も近い実際のディスクリートな流れを生じるであろう、等式(1)で計算された段の数であり、CONSTANTは流れ制御バルブの比例しない部分を補償するために用いられる数であり、VALVRATEは1段あたりの流れ制御バルブ42を通る増分的な流れを表わす定数であり、さらにFLOWは実際の流量である。
流れ制御バルブ42により供給される流量が段の数に比例しないならば、段の数から実際の流量を得るために上で説明されたソフトウェアのルックアップ・テーブルが利用され得る。この場合、ディスクリートな実際の流量の各々と選択された最高流量を比例して、単に最も近い実際の流量に対応する段の数を検索するだけでなく、実際の流量も同様に検索される。
段の数および対応する実際の最高流量が決定された後で、コントローラ44は呼吸が患者34に届けられる時間の長さを決定する呼吸届け期間を決定する。
一般に、呼吸届け時間は、一回の呼吸の期間がどれぐらいの長さであるべきかを決定するために利用される任意の時間、と大雑把に規定される。呼吸届け期間が大雑把に規定される一方で、説明された実施例のベンチレータ30の説明を助けるために特定の一規定が下で明らかにされる。
ベンチレータ30の重要な特徴は実質的にはオペレータにより予め選択された潮流量に等しい実際の潮流量を患者34へ届けることに向けられている。そのような正確な実際の潮流量を届けることは呼吸届け期間の大きさを調節することにより達成される。
オペレータにより選択された潮流量を届けるのに必要な呼吸届け期間を決定する1つの簡単な方法は、等式(1)に従って決定される実際の最高流量で予め定められた潮流量を除算することであろう。この簡単な方法は流量が呼吸の初めで瞬間的に最高流量へ増加され、呼吸の終りで瞬間的に減少されることを仮定している。しかしながら、流れ制御バルブ42は瞬間的に開かれ得ないので、呼吸の最初の部分の間に届けられる実際の量は理想とされる方法により予期される量よりも幾分少ない。この容積の差は未届け量と呼ばれ、呼吸の最初の部分間の流量の増加の間に失なわれるものであろう。また、流れ制御バルブ42は呼吸の最後で瞬間的に閉じられないので、この簡単な方法によっては考慮に入れられない、届けられた余分な量が存在する。第4図では、失なわれる未届け量は点線により境界を規定された区域20に対応し、届けられる余分な量は点線により境界を規定された区域22に対応する。流れ制御バルブ42は同一速度で開閉され得ないので、失なわれた未届け量は届けられた余分な量に等しくなり得ず、そのため届けられた実際の量は予め選択された潮流量と等しくならないであろう。この容積の誤差を説明するために、コントローラ44は、届けられる実際の量が予め選択された潮流量に実質的に等しくなるように、呼吸届け期間を調節する。
次の検討をするために、呼吸届け期間は、流量が迅速に増加する呼吸の最初の部分と呼吸の最後の部分の間の流れの迅速な減少のちょうど前の、呼吸の中間部分とを含むが、呼吸のこの最後の部分は除外する、と規定される。したがって、第4図および第5図では、呼吸届け期間は時間tiで始まり、時間tqで終わる。呼吸届け期間はベンチレータの動作を説明するためだけにこの態様で厳密に規定される。
呼吸届け期間は次の等式に従って決定される。
BDP=(VX+VOLUME−VY)/FLOW, (3)
ここではVXはバルブが開いている間に失なわれる未届けの量であり、VYはバルブの閉じている間に届けられる余分の量であり、VOLUMEは選択された潮流量であり、FLOWは予め選択された流量に最も近接した実際の流量であり、さらにBDPは呼吸届け期間である。
したがって、等式(3)からわかるように、失なわれる未届け量VXが届けられる余分の量VYよりも多ければ、呼吸届け期間はこの差を説明するために増加される。失なわれる未届け量VXが届けられる余分の量VYより少ないならば、呼吸届け達期間はこの差を調節するために短縮される。たまたま、届けられる余分の量が失なわれる未届け量に厳密に等しければ、呼吸届け期間は変えられない。このように、この態様での呼吸届け期間の調節は、届けられる実際の量が実質的に予め選択された潮流量に等しくなることを確実にする。
ソフトウェアのルックアップ・テーブルにストアされる、失なわれる未届け量および届けられる余分の量は時間と流れの積の合計と算定され得て、時間と流れの積は流れ制御バルブの増分的な開放のうちの1つで届けられる実際の流れとその増分的な開放に対しバルブが開けられる時間の長さとの積と算定される量として規定される。特に、失なわれる未届け量は次の等式に従って決定される。
ここではFLOWは実際の最高の流れであり、Anはそのn番目の増分的な位置で流れ制御バルブにより届けられる実際の流れであり、tnは流れ制御バルブがn番目の位置にある時間の量であり、さらにVXは失なわれる未届け量である。
流れ制御バルブ42の閉鎖中に届けられる余分の量は次の等式に従って決定される。
ここではAnはそのn番目の増分的な位置で流れ制御バルブにより届けられる実際の流れであり、tnは流れ制御バルブ42がn番目の位置にある時間の量であり、さらにVYは呼吸の最後の部分の間で流れ制御バルブ42が閉じている間に届けられる余分の量である。
複数個の、時間と流れの積の合計として、届けられる余分の量と失なわれる未届け量とを計算する代わりに、これら量はまた容積を直接測定することにより実験的に決定され得る。どのようにしてそれらが決定されるかということと無関係に、これら量はソフトウェアのルックアップ・テーブルにストアされる。ルックアップ・テーブルは流れ制御バルブの各実際の最高の流れの位置に対する合計の累積的な、失なわれる未届け量および届けられる余分の量を提供する。
コントローラ44は流れ制御バルブのステッパモータに対して従来の上り傾斜プロファイルおよび下り傾斜プロファイルの特性で制御するステッパモータ74に対する上り傾斜プロファイルはモータ74が加速する速度を決定し、さらに下り傾斜のプロファイルはモータが減速する速度を決定する。傾斜プロファイルの各々は、本質的に一連の遅延時間要素を含み、この遅延時間によってステッパモータが出力を与えられる速度が決まる。7個の異なる組の上り傾斜のプロファイルおよび下り傾斜のプロファイルが提供される。(1)流れ制御バルブ42が動かされて開閉される方向、(2)ステッパモータ74が流れ制御バルブ42をその所望の位置へ動かすために変位されなければならない段の数によって、7個の組のうち1個が選択されて、ステッパモータ74を駆動する。方向によって異なる傾斜のプロファイルの組が選ばれる。上記したように、流れ制御バルブ42はばねにより偏倚されて閉じられるため、これによってステッパモータ74が加速または減速され得る速度に影響を及ぼす。したがって、流れ制御バルブ42が開いているならば、ステッパモータ74はばね84の力より大きな力を出力しなければならないので、よりゆっくりと加速されねばならず、一方バルブが閉じているならば、ステッパモータ74はより迅速に加速され得る。ステッパモータ74の移動時間を最小にするために異なる傾斜のプロファイルの組は段の数に基づいて与えられる。たとえば、所望のバルブの位置が現在のバルブの位置から100段離れているならば、特定の傾斜プロファイルの組が利用される。所望のバルブの位置がわずか20段しか離れていなければ、異なる傾斜のプロファイルの組が利用される。傾斜のプロファイルは従来の公知の方法で開発される。上で説明したような方向および距離に加えて、傾斜のプロファイルに関連する特定の時間の遅延は、使用されるステッパモータ74およびステッパモータ74と流れ制御バルブ42との間の結合された重量および摩擦によって変化する。全部で合計14個の傾斜プロファイルを有する傾斜プロファイルの7個の組がAppendix Aでリスト化されている。
ベンチレータは患者に複数の呼吸の各々を届けるために、選択された最高流量に最も近いディスクリートな流量を届けるのに必要とされる、ステッパモータの傾斜のプロファイル、呼吸届け期間、および段の数を利用する。各呼吸は同じ予め定められた傾斜のプロファイル、呼吸届け期間、および段の数に基づいているので、各呼吸は実質的に同一の流れのプロファイルを有する。さらに、各呼吸の潮流量は、呼吸届け期間が調節されて流量の可変性を保証するので、予め定められた潮流量に実質的に同一である。
ここで第4図を参照すると、矩形のプロファイルで呼吸を届ける際には、ベンチレータは上への傾斜のプロファイルと下への傾斜のプロファイルとからなる特定の傾斜のプロファイルの組を選択する。次いで、ベンチレータは選択された上への傾斜のプロファイルに従ってステッパモータ74を加速し、時間tiで流れを届け始める。ステッパモータ74は選択された下への傾斜のプロファイルに従って減速され、遂にはステッパモータ74は時間tpで選択された最高の流れに最も近接するディスクリートな流れに対応する、等式(1)で予め定められた段に達する。ステッパモータ74が傾斜のプロファイルに従って段きざみされて時間tfで流れ制御バルブが完全に閉じられるまでそれを徐々に閉じていく後の時間tqまで、流れは実質的に一定のままである。より具体的に言うと、時間tqでステッパモータ74は選択された上への傾斜のプロファイルに従って加速され、方向が異なるのでそれは時間tiで流れ制御バルブ42を開くために用いられるプロファイルとは異なる。ステッパモータ74は次いで選択された下への傾斜のプロファイルに従って減速されるが、これもまたバルブの向きが変わっているので流れ制御バルブ42が時間tfで完全に閉じるまでは異なっている。
所望されるときには、ベンチレータ30はまた先細りになった呼吸のプロファイルを有する呼吸を届ける。ここで第5図を参照すると、このプロファイルを有する呼吸は、流れを零から最高流量へ迅速に増加し、最高流量を最高流量の2分の1に徐々に減少し、次に呼吸の最後の部分の間に流量を零に戻るように迅速に減じることにより届けられる。第5図に示される流れのプロファイル16は第3B図の先細りになった呼吸のプロファイル12の区分的線形近似である。
先細りになったプロファイルを有する複数の呼吸の届けは矩形のプロファイルを有する複数の呼吸を届けるのに必要とされる段以外にいくつかの付加的な予備的な段を必要とする。第1の呼吸届け期間が先細りになったプロファイルのために調節されなければならない。特に、ベンチレータが上で説明されたような選択された最高の流れの最も近接するディスクリートな流れおよび呼吸届け期間を与えるのに必要な段の数を決定した後で、呼吸が先細りになったプロファイルを有する必要があるならば、コントローラ44は呼吸の最初での最高流量を呼吸の最後で最高流量の2分の1へ徐々に減じるように調節をするために、3分の1だけ呼吸届け期間を増加する。ここで第3B図を参照すると、先細りになったプロファイルを有する呼吸で届けられる潮流量は同じ期間を有する矩形のプロファイルを有する呼吸の潮流量よりも点線の区域24に等しい面積だけ少ない。この点線の区域24は呼吸のプロファイル12の下部の区域26の3分の1に等しい。したがって、先細りになったプロファイル12を提供し、しかも同じ潮流量を届けるために、呼吸届け時間は先細りになったプロファイルを有する呼吸に対し3分の1だけ増加される。呼吸届け期間を増加するのに加えて、コントローラ44は先細りになったプロファイルを有する呼吸を届けるためにいくつかの他の段を実施する。コントローラ44は等式(1)で決定されたSTEPSの値を2で除算することにより最高流量の2分の1を届けるのに必要とされる段の数を決定する。
呼吸の中間部分の間に流量が最高流量から最高流量の2分の1へ徐々に減少する間に、コントローラ44は予め定められた時間間隔が通過するごとに1段だけ流れ制御バルブ42を閉じる。したがって、流れを最高流量から最高流量の2分の1へ徐々に減じるのに必要とされる時間間隔の数はそのために必要とされる段の数に等しい。
各時間間隔は等しい持続期間を有し、これは流れ制御バルブ42をその最高流量の位置から最高流量の2分の1の位置へ動かすのに必要とされる段の数で先細りになったプロファイルのための増加された呼吸を届ける期間を除算することにより決定される。時間間隔の持続期間が計算された後で、ベンチレータ30は先細りになったのプロファイルを有する呼吸を届け得る。
ここで第5図を参照すると、流れのプロファイル16は最初の時間tiでの流量を後の時間tpでの最高流量へ迅速に増加し、呼吸の中間部分の間の流量を時間tqで最高流量の2分の1へ徐々に減じてゆき、次に時間tfで流量を零まで迅速に減じることにより与えられる。呼吸の中間部分の間に流量を最高流量から最高流量の2分の1へ徐々に減じることは上で説明された間隔の各々が経過するときに流れ制御バルブ42を1段閉じることにより達成される。特に、時間tpで流量が最高流量に達するとすぐに、ベンチレータは時間tpの後で1段だけ流れ制御バルブを閉じる前に間隔の2分の1を待つ。その後で各全間隔が経過すると、流れ制御バルブ42は1段だけ閉じられ、遂に流量は最高流量の2分の1へ減少し、そのときコントローラ44は呼吸を終えるために流れ制御バルブ42を迅速に閉じる前に間隔の2分の1を待つ。
いずれかのプロファイルの1回の呼吸の届けを完了すると、ベンチレータ30は別な呼吸を届ける前に予め選択された呼吸速度に基づいて予め定められた時間の間待つ。ベンチレータ30により届けられる後の呼吸の各々はまた同じ最高流量、実際の流量、呼吸届け期間、および最初の呼吸を届けるために利用される傾斜のプロファイルに基づいており、それらのすべてが呼吸の届けの前に計算されていた。このように、呼吸の各々は同じ流れのプロファイルを有し、呼吸は実質的に同一であり、かつ第6図に示されるように実質的に同一の潮流量を有する。
【図面の簡単な説明】
第1図はこの発明の一実施例に従ったベンチレータの空気レイアウトの概略図である。
第2図はこの発明の一実施例に従った流れ制御バルブの部分的断面の側部正面図である。
第3A図は矩形の呼吸のプロファイルの例示である。
第3B図は先細りになった呼吸のプロファイルの例示である。
第4図は矩形のプロファイルを有する呼吸から中間部分が除去された、簡略化された流れのプロファイルの例示である。
第5図は先細りになったプロファイルを有する呼吸から中間部分が除去された、簡略化された流れのプロファイルの例示である。
第6図は個の簡略化された、実質的に同一の流れのプロファイルの例示である。
図において、30はベンチレータ、32は供給源、36は合着フィルタ、38はアキュムレータ、40は空気調整器、41は脈流防止器、42は流れ制御バルブ、44はマイクロコンピュータ・コントローラ、48は放出バルブ、52は近位圧力変換器、56はインレット経路、58はバルブハウジング、60はアウトレット流路、62はバルブシート、64は開口、72は球、74はステッパモータ、76はステッパモータの軸、78はカム、80はカム表面、82はローラ、84はばね、86は信号、88はワイヤである。
【特許請求の範囲】
1.呼吸を届ける前に複数の呼吸の流れのプロファイルがどのようなものであるかを決定することにより呼吸能力が損なわれた患者に複数の実質的に同一の呼吸を届けるためのベンチレータであって、前記ベンチレータが呼吸を届ける前に複数の呼吸の流れのプロファイルがどのようなものであるかを決定するための手段を含み、前記流れのプロファイルは所望の最高流量および所望の潮流量に基づいて予め決定され、バルブ部材とバルブシートを有する流量制御バルブを含み、前記流量制御バルブは、バルブシートに対してバルブ部材の変位量を買えることによって増分的に予め定められた可変な流量で呼吸を届けることが可能であり、前記バルブシートは前記流量制御バルブの出口側に広がった円錐台形状を有し、前記バルブ部材の変位量を変えたとき、前記バルブ部材は前記円錐台形状の円錐部分で接触し、前記流量制御バルブに結合されて、複数の完全な呼吸を患者に届けるための手段とを含み、前記呼吸の各々が実質的に同一の流れのプロファイルを有するベンチレータ。
2.気体の調圧源から患者へ人工呼吸を提供するベンチレータであって、前記ベンチレータが患者へ呼吸を届けるベンチレータの流れを制御する、バルブ部材とバルブシートを有する制御バルブを含み、前記流れ制御バルブが気体供給源から患者への気体の流量を制御し、前記バルブ部材は患者へ種々の流量で空気を供給するよう、前記バルブシートに対して複数の位置へ可動であり、前記バルブシートは前記流量制御バルブの出口側に広がった円錐台形状を有し、前記バルブ部材の変位量を変えたとき、前記バルブ部材は前記円錐台形状の円錐部分で接触し、流れプロファイルに関するデータを記憶する記憶手段と、前記制御バルブの位置を制御するための開ループ制御手段を含み、前記開ループ制御手段が前記制御バルブの位置または前記制御バルブを介する気体の実際の流量に関するフィードバックを必要とせずに前記制御バルブの開閉を引き起こす指令信号を発生し、前記指令信号は前記記憶手段に記憶されたデータに基づいて発生される、ベンチレータ。
3.前記開ループ制御手段は前記制御バルブが1分当たりの呼吸の予め定められた速度に従って患者に呼吸を届けるようにする、特許請求の範囲第2項に記載のベンチレータ。
4.前記開ループ制御手段は前記制御バルブが時間の波形に対する予め定められた流量に従って患者へ呼吸を届けるようにする、特許請求の範囲第3項に記載のベンチレータ。
5.前記制御バルブの位置と前記制御バルブを介する気体の流量との間に所定の関係が存在する、特許請求の範囲第2項に記載のベンチレータ。
6.前記制御バルブを介する流れがチョークされる、特許請求の範囲第5項に記載のベンチレータ。
7.前記開ループ制御手段は前記制御バルブが各呼吸の間患者へ予め定められた潮流量の気体を届けるようにする、特許請求の範囲第5項に記載のベンチレータ。
8.前記開ループ制御手段が患者へ呼吸を届ける前に前記予め定められた潮流量を届けるのに必要とされる前記制御バルブの位置を決定する、特許請求の範囲第7項に記載のベンチレータ。
9.前記制御バルブが、回転可能な軸を有するステッパモータを含み、前記ステッパモータは前記指令信号に応答して前記軸の回転を引き起し、そこに開口を有するバルブシートを含み、前記呼吸作用の気体が前記開口を介して流れ、前記バルブシートと組になる球を含み、前記バルブシートに関連する前記球の運動は前記開口の面積が変化するようにし、したがって前記開口を介する気体の流量が変化するようにし、前記軸の回転を前記バルブシートに関連する前記球の運動へ移すための手段を含む、特許請求の範囲第2項に記載のベンチレータ。
10.前記球の運動へ移すための手段が、前記軸に装設されるカムを含み、前記カムが軸方向に面するカム表面を有し、前記カム表面に係合しかつ前記軸が回転すると前記軸に関連して前記軸方向に転置されるカムフォロワと、一方の端部で前記球に、かつもう一方の端部で前記カムフォロワに結合される長手の直線ワイヤとを含み、直線ワイヤは前記球の半径方向への転置を引き起しかつ不適当な整列もしくは摩滅に拘らず前記球と前記バルブシートとの間の封止係合するように撓み性がある、特許請求の範囲第9項に記載のベンチレータ。
11.前記制御バルブが緊急の場合に前記制御バルブを閉じた位置へ偏倚するためのばねをさらに含み、前記ばねが前記軸の回転を引き起し、前記ステップモータは通常の動作時には前記ばねの偏倚する力より大きな力を出力する、特許請求の範囲第9項に記載のベンチレータ。
12.前記ばねが巻回された材料の薄いストリップから形成され、前記ばねが前記軸を取囲む、特許請求の範囲第11項に記載のベンチレータ。
1.呼吸を届ける前に複数の呼吸の流れのプロファイルがどのようなものであるかを決定することにより呼吸能力が損なわれた患者に複数の実質的に同一の呼吸を届けるためのベンチレータであって、前記ベンチレータが呼吸を届ける前に複数の呼吸の流れのプロファイルがどのようなものであるかを決定するための手段を含み、前記流れのプロファイルは所望の最高流量および所望の潮流量に基づいて予め決定され、バルブ部材とバルブシートを有する流量制御バルブを含み、前記流量制御バルブは、バルブシートに対してバルブ部材の変位量を買えることによって増分的に予め定められた可変な流量で呼吸を届けることが可能であり、前記バルブシートは前記流量制御バルブの出口側に広がった円錐台形状を有し、前記バルブ部材の変位量を変えたとき、前記バルブ部材は前記円錐台形状の円錐部分で接触し、前記流量制御バルブに結合されて、複数の完全な呼吸を患者に届けるための手段とを含み、前記呼吸の各々が実質的に同一の流れのプロファイルを有するベンチレータ。
2.気体の調圧源から患者へ人工呼吸を提供するベンチレータであって、前記ベンチレータが患者へ呼吸を届けるベンチレータの流れを制御する、バルブ部材とバルブシートを有する制御バルブを含み、前記流れ制御バルブが気体供給源から患者への気体の流量を制御し、前記バルブ部材は患者へ種々の流量で空気を供給するよう、前記バルブシートに対して複数の位置へ可動であり、前記バルブシートは前記流量制御バルブの出口側に広がった円錐台形状を有し、前記バルブ部材の変位量を変えたとき、前記バルブ部材は前記円錐台形状の円錐部分で接触し、流れプロファイルに関するデータを記憶する記憶手段と、前記制御バルブの位置を制御するための開ループ制御手段を含み、前記開ループ制御手段が前記制御バルブの位置または前記制御バルブを介する気体の実際の流量に関するフィードバックを必要とせずに前記制御バルブの開閉を引き起こす指令信号を発生し、前記指令信号は前記記憶手段に記憶されたデータに基づいて発生される、ベンチレータ。
3.前記開ループ制御手段は前記制御バルブが1分当たりの呼吸の予め定められた速度に従って患者に呼吸を届けるようにする、特許請求の範囲第2項に記載のベンチレータ。
4.前記開ループ制御手段は前記制御バルブが時間の波形に対する予め定められた流量に従って患者へ呼吸を届けるようにする、特許請求の範囲第3項に記載のベンチレータ。
5.前記制御バルブの位置と前記制御バルブを介する気体の流量との間に所定の関係が存在する、特許請求の範囲第2項に記載のベンチレータ。
6.前記制御バルブを介する流れがチョークされる、特許請求の範囲第5項に記載のベンチレータ。
7.前記開ループ制御手段は前記制御バルブが各呼吸の間患者へ予め定められた潮流量の気体を届けるようにする、特許請求の範囲第5項に記載のベンチレータ。
8.前記開ループ制御手段が患者へ呼吸を届ける前に前記予め定められた潮流量を届けるのに必要とされる前記制御バルブの位置を決定する、特許請求の範囲第7項に記載のベンチレータ。
9.前記制御バルブが、回転可能な軸を有するステッパモータを含み、前記ステッパモータは前記指令信号に応答して前記軸の回転を引き起し、そこに開口を有するバルブシートを含み、前記呼吸作用の気体が前記開口を介して流れ、前記バルブシートと組になる球を含み、前記バルブシートに関連する前記球の運動は前記開口の面積が変化するようにし、したがって前記開口を介する気体の流量が変化するようにし、前記軸の回転を前記バルブシートに関連する前記球の運動へ移すための手段を含む、特許請求の範囲第2項に記載のベンチレータ。
10.前記球の運動へ移すための手段が、前記軸に装設されるカムを含み、前記カムが軸方向に面するカム表面を有し、前記カム表面に係合しかつ前記軸が回転すると前記軸に関連して前記軸方向に転置されるカムフォロワと、一方の端部で前記球に、かつもう一方の端部で前記カムフォロワに結合される長手の直線ワイヤとを含み、直線ワイヤは前記球の半径方向への転置を引き起しかつ不適当な整列もしくは摩滅に拘らず前記球と前記バルブシートとの間の封止係合するように撓み性がある、特許請求の範囲第9項に記載のベンチレータ。
11.前記制御バルブが緊急の場合に前記制御バルブを閉じた位置へ偏倚するためのばねをさらに含み、前記ばねが前記軸の回転を引き起し、前記ステップモータは通常の動作時には前記ばねの偏倚する力より大きな力を出力する、特許請求の範囲第9項に記載のベンチレータ。
12.前記ばねが巻回された材料の薄いストリップから形成され、前記ばねが前記軸を取囲む、特許請求の範囲第11項に記載のベンチレータ。
【第1図】

【第3a図】
【第3b図】
【第2図】
【第4図】
【第5図】
【第6図】
【第3a図】
【第3b図】
【第2図】
【第4図】
【第5図】
【第6図】
【特許番号】特許第3058881号(P3058881)
【登録日】平成12年4月21日(2000.4.21)
【発行日】平成12年7月4日(2000.7.4)
【国際特許分類】
【出願番号】特願昭62−280270
【出願日】昭和62年11月4日(1987.11.4)
【公開番号】特開平1−85667
【公開日】平成1年3月30日(1989.3.30)
【審査請求日】平成6年10月26日(1994.10.26)
【前置審査】 前置審査
【出願人】(999999999)バード・プロダクツ・コーポレーション
【参考文献】
【文献】実開 昭51−91819(JP,U)
【文献】特表 昭56−500199(JP,A)
【文献】米国特許4527557(US,A)
【登録日】平成12年4月21日(2000.4.21)
【発行日】平成12年7月4日(2000.7.4)
【国際特許分類】
【出願日】昭和62年11月4日(1987.11.4)
【公開番号】特開平1−85667
【公開日】平成1年3月30日(1989.3.30)
【審査請求日】平成6年10月26日(1994.10.26)
【前置審査】 前置審査
【出願人】(999999999)バード・プロダクツ・コーポレーション
【参考文献】
【文献】実開 昭51−91819(JP,U)
【文献】特表 昭56−500199(JP,A)
【文献】米国特許4527557(US,A)
[ Back to top ]