
複数のEMセンサ位置を補正するための方法及び装置
【課題】複数のEM受信器を利用したトラッキングシステムにおいて磁場歪みを補正する技法を提供する。
【解決手段】本技法の一態様では、電磁場の存在下で複数の電磁気センサ(12、14)の箇所を表す信号を収集し、1つまたは複数の品質計測値に基づいて複数の電磁気センサ(12、14)からの信号間で選択を行う。本技法の別の態様では、1つまたは複数の電磁場歪みを補正するのに最適なEMセンサを選択するためのシステム(10)が提供され、複数のEMセンサ(12、14)と、該複数のEMセンサ(12、14)の各々の位置を表す信号を送信または受信するための追加的EMセンサ(16)と、複数のEMセンサ(12、14)の箇所を表す信号を収集し、1つまたは複数の品質計測値に基づいて複数のEMセンサ(12、14)の信号間で選択を行うように構成させた制御器(22)を含む。
【解決手段】本技法の一態様では、電磁場の存在下で複数の電磁気センサ(12、14)の箇所を表す信号を収集し、1つまたは複数の品質計測値に基づいて複数の電磁気センサ(12、14)からの信号間で選択を行う。本技法の別の態様では、1つまたは複数の電磁場歪みを補正するのに最適なEMセンサを選択するためのシステム(10)が提供され、複数のEMセンサ(12、14)と、該複数のEMセンサ(12、14)の各々の位置を表す信号を送信または受信するための追加的EMセンサ(16)と、複数のEMセンサ(12、14)の箇所を表す信号を収集し、1つまたは複数の品質計測値に基づいて複数のEMセンサ(12、14)の信号間で選択を行うように構成させた制御器(22)を含む。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、全般的には外科的介入その他の医学的手技向けなど磁場を用いたトラッキングシステムに関する。さらに詳細には、本発明は、複数の電磁気センサ位置を補正するための技法に関する。
【背景技術】
【0002】
トラッキングシステムは、患者の身体内への医用(例えば、外科用)デバイスの精細かつ迅速な配置を支援するための情報をオペレータ(例えば、医師)に提供するために使用されてきた。一般に、患者の解剖構造の描出を含む画像をオペレータに対して表示しており、この描出はデバイス箇所をその上に投射して表すシンボルまたは像を伴っている。デバイスは患者の身体を基準として位置決めされるため、表示させる画像は正確なデバイス箇所を反映するように更新される。患者解剖構造の画像は、医学的処置や外科的処置に先だって作成されることも、その途中で作成されることもある。さらに、X線、コンピュータ断層(CT)、磁気共鳴撮像(MRI)、陽電子放出断層(PET)、超音波、内視鏡、並びにUV、可視光及び赤外光スペクトルでの光学撮像など適当な任意の医用撮像技法が利用されることがある。
【0003】
既存の画像組に使用する場合、これら以前に記録しておいた診断画像組それ自体は、その精密なスキャン編成やその再構成アルゴリズムの空間演算のために3次元直線座標系を規定している。したがって、利用しているデバイスの外部座標を用いてデバイスの位置及び方向を正確に表すためには、画像の座標を利用中のデバイスの外部座標と相関させる必要がある。
【0004】
それぞれの座標間で変換を実施できるようにするため、ロボット機械的リンクや符号器によって様々な座標組を規定することがある、またより通常では、固定の患者支持体、該支持体に対して固定とし得るカメラなどの2つ以上の受信器、並びにデバイス上のガイドまたはフレームに取り付け患者支持体及びカメラフレームを基準としたデバイスの位置及び方向を三角測量によって自動的に決定できるようにした複数の信号伝達素子(例えば、電磁気センサ)によって様々な座標組が規定されることがある。2つのビデオカメラ及び複数の放出体その他の位置信号伝達素子を利用した3次元トラッキングシステムは一般に利用可能となって久しく、またこうした手術室系に容易に適合する。トラッキングを受けるマーカが診断画像内に現れると、手術室座標と画像の座標の間での変換を規定することが可能となる。
【0005】
典型的なトラッキングシステムの1つでは、1つの電磁気(「EM」)送信器を患者の身体に対して固定させ、1つのEM受信器をデバイスに対して固定させ、かつ別のEM受信器をX線蛍光透視システムのC字アームに対して固定させている。このEM送信器はEM受信器により検出される電磁場を発生させる。撮像システムに対して固定の受信器が受信した信号を適正に処理して受信器の位置及び方向を決定することができる。この受信器は撮像システムに対して固定であるため、受信器を用いてC字アームの位置及び方向を決定することができる。したがって、デバイスに対して固定の受信器が受信した信号が処理された後、デバイス受信器の位置及び方向を撮像システムと相関させ、デバイスの位置及び方向を診断画像上に投射させることができる。
【0006】
患者解剖構造の診断画像に対する相関は多くの要因により複雑化することがあることが理解されよう。例えば、磁場歪曲物体(例えば、C字アーム、X線検出器あるいは外科用テーブル)が存在するとEM送信器から放出された磁場に歪みが生じ、これによりこの磁場の大きさ及び方向が変化することがある。例えば、別の発生源からの信号が存在すると、伝導性物体内のうず電流の磁場、あるいは強磁性体の磁場歪曲効果によってこうした歪みが生じる可能性がある。これらの歪みは補償しないと、受信器が計測した位置及び方向に誤差を生じることになる。一般に歪みマップを使用するとある種の歪み物体は補償されるが、既存の技法を用いたのでは歪みのすべてを完全に補償できないことがある。換言すると、歪みマップにより補償されずにある程度の残留歪みが存在することがある。さらに、送信器と受信器の間の距離が増大すると、検知したデータの信号対雑音比が悪化する。例えば、送信器−受信器間距離が約18インチ(概ね500mm)を超える大きさであると、既存のテクノロジーによるある種の実現形態ではデータが信頼できなくなることがある。このため、送信器−受信器間距離が大きい(例えば、C字アームを動かすため)場合、C字アームに関して高信頼の位置及び方向が得られないことがある。C字アームに関する位置及び方向が信頼できないと、デバイス位置及び方向を診断画像上に正確に投射できないことがある。
【0007】
したがって、撮像システムに対して固定の複数のEM受信器を利用するトラッキングシステムを用いてこれらの複雑化要因に対処することがある。例えば、未補償歪みがEM受信器のすべてに対して同じ影響を及ぼさず、受信器のうちの1つまたは幾つかでは受容可能なデータを返すが受信器のうちの1つではそうでないことがあり得る。また一方、そのC字アームの位置に応じてEM受信器のうちの1つは受容可能な送信器−受信器間距離を有するが別の受信器はそうでないことがあり得る。しかし、従来の技法は全般的にはC字アームに対して固定の単一のEM受信器を含むようなトラッキングシステム向けに設計されている。
【特許文献1】米国特許第5,676,673号
【発明の開示】
【発明が解決しようとする課題】
【0008】
したがって、磁場歪みを補正するための改良技法に対する要求が存在する。具体的には、複数のEM受信器を利用したトラッキングシステムにおいて磁場歪みを補正する技法に対する要求が存在する。
【課題を解決するための手段】
【0009】
本技法は、複数のEMセンサを含むトラッキングシステムにおいて磁場歪みを補正するための改良技法を提供する。一実施形態では、本技法は1つまたは複数の電磁場歪みを補正するのに最適なEMセンサを選択する方法を提供する。本方法は、EM場の存在下で複数のEMセンサの箇所を表す信号を収集する工程を含む。本方法はさらに、1つまたは複数の品質計測値に基づいて複数のEMセンサからの信号間で選択を行う工程を含む。
【0010】
別の実施形態では、本技法は1つまたは複数の電磁場歪みを補正するのに最適なEMセンサを選択するためのシステムを提供する。本システムは、複数のEMセンサと、該複数のEMセンサの各々の箇所を表す信号を送信または受信するための追加的EMセンサと、を含む。本システムはさらに、複数のEMセンサの箇所を表す信号を収集すると共に、1つまたは複数の品質計測値に基づいて該複数のEMセンサからの信号間で選択を行うように構成させた制御器を含む。
【0011】
別の実施形態では、本技法は、1つまたは複数の電磁場歪みを補正するのに最適なEMセンサを選択するためのコンピュータ読み取り可能媒体上に保存したコンピュータプログラムを提供する。本コンピュータプログラムは複数のEMセンサの各々を表す信号を収集するように製作し配列させている。さらに、本コンピュータプログラムはまた、1つまたは複数の品質計測値に基づいて該複数のEMセンサからの信号間で選択を行うように製作し配列させている。
【発明を実施するための最良の形態】
【0012】
本発明に関するこれらの特徴、態様及び利点、並びにその他の特徴、態様及び利点については、同じ参照符号が図面全体を通じて同じ部分を表している添付の図面を参照しながら以下の詳細な説明を読むことによってより理解が深まるであろう。
【0013】
ここで図1を参照すると、撮像/トラッキングシステム10を表している。図示した実施形態では、撮像/トラッキングシステム10は、複数のEMセンサアセンブリ12、14、16及び18を含むトラッキング構成要素を備える。さらに撮像/トラッキングシステム10は、画像データを収集し処理するためのX線蛍光透視システム20を含む。図示したように、撮像/トラッキングシステム10はさらに制御器22及びワークステーション24を含む。
【0014】
上で指摘したように、本検討においては特にX線撮像システム(具体的には、蛍光透視システム)に言及しているが、本発明をこれらの種類や任意の特定の種類の撮像システムや撮像様式に限定しようと意図していないことを理解されたい。したがって、本技法はリアルタイムで(またさらには、外科的介入その他の手技に先だって収集した画像と共に)用いられる別の撮像様式と連係させた器具の位置に関するトラッキング、解析及び表示のために使用されることがある。
【0015】
X線蛍光透視システム20は、C字アーム26、X線放射源28及びX線検出器30を含むC字アームシステムとして図示している。X線放射源28はC字アーム26上に装着されており、またX線検出器30はX線放射源28と反対側でC字アーム26上に装着されている。幾つかのシステムではX線放射源28とX線検出器30は固定状態であるが、典型的な蛍光透視システムではC字アーム26によってX線放射源28及びX線検出器30を患者32の周りで移動可能とさせている。動作時において、X線放射源28はX線蛍光透視に適した放射ストリームを放出する。X線検出器30はテーブル34上に配置させた患者32を通過したX線源28からの放射ストリームの一部を受け取る。X線検出器30はこの放射ストリームの強度を表す電気信号を発生させる。これらの信号を適正に収集し処理して対象内のフィーチャの画像を再構成できることは当業者であれば理解されよう。
【0016】
複数のEMセンサアセンブリを蛍光透視システムに対して固定とさせることがある。図示した実施形態では、第1及び第2のセンサアセンブリ12、14を、X線蛍光透視システム20のX線検出器30上に固定した較正アセンブリ38に固定とさせている。第3のEMセンサアセンブリ16は患者32に対して固定とさせることがある。図示したように、第3のEMセンサアセンブリ16は患者32上に固定させている。第4のEMセンサアセンブリ18は医用(例えば、外科用)デバイス36に対して固定させることがある。図示した実施形態では、第2のEMセンサアセンブリ14が医用デバイス36の操作端部に装着されている。デバイス36は医学的手技での使用に適当した任意のデバイスとすることができる。例えばデバイス36は、ドリル、ガイドワイヤ、カテーテル、内視鏡、腹腔鏡、バイオプシー針、アブレーションデバイス、あるいは同様の別のデバイスとすることができる。
【0017】
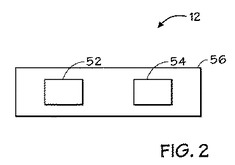
一般に、EMセンサアセンブリ12〜18の各々は少なくとも1つのEMセンサを備える。具体的な一実現形態では、EMセンサアセンブリ12〜18の各々は、電磁場の完全性を監視するために2つのEMセンサを備えることがある。図2は、本技法の一実施形態による2つのEMセンサを備えるように第1のEMセンサアセンブリ12を表している。
【0018】
再度図1を参照すると、EMセンサアセンブリ12〜18の各々に含まれている1つまたは複数のEMセンサは当業者であれば理解されようにEM受信器またはEM送信器として実現させることがある。一実施形態では、第3のEMセンサアセンブリ16はEM送信器を含むことがあり、一方残りのEMセンサアセンブリ12、14及び18はそれぞれ1つのEM受信器を含むことがある。この実施形態では、デバイス36に対して固定とした第4のEMセンサアセンブリ18により検知した信号は、デバイス36の箇所(例えば、X、Y及びZ座標並びにピッチ角、偏揺れ角及び横転角を含む位置及び方向)の決定に使用されることがある。同様に、第1及び第2のEMセンサアセンブリ12、14により検知した信号はそれぞれのセンサアセンブリの箇所の決定に使用されることがある。2つのEMセンサは、受信器に対するものか送信器に対するものかに関わりなくその相互インダクタンスは同じであることが理解されよう。したがって、EM受信器と送信器に関する相対的配置及び機能は逆にすることができる。例えば、EM受信器を患者32に対して固定とさせることがあり、一方EM送信器はデバイス36及びC字アーム26に対して固定とさせることがある。
【0019】
本技法では、位置検出をその内部で実現できる磁場を発生させるようにEMセンサを使用するのに適した任意の技法を利用することができる。一例として、直角に配置させた3つの磁気双極子(例えば、電流ループまたは電磁石)を含め第3のEMセンサアセンブリ16を磁場発生器として利用することがある。双極子の各々が発生させる電磁場は、位相、周波数、時分割多重、その他に関して互いに識別可能である。座標決定に対して電磁場の近磁場特性を使用できることは当業者であれば理解されよう。
【0020】
図示した実施形態では制御器22は、トラッキングデータ及び撮像データを受信するためのインタフェース回路40と、処理回路42と、メモリ回路44と、ワークステーション24と連絡させたワークステーションインタフェース回路40と、を含む。制御器22を実現するために1つまたは複数のコンピュータを用いることがあることが理解されよう。一般に処理回路42(典型的には、ディジタル信号プロセッサ、CPU、その他を含むことになる)は、デバイス36の箇所を診断画像上に投射できるようにトラッキングデータを処理することができる。さらに処理回路42はまた、データを意味のある診断画像に再構成するように撮像データを処理することができる。メモリ回路44は撮像データ及びトラッキングデータ並びにその他のシステムパラメータを保存する役割をすることができる。
【0021】
図示したように、ワークステーション24はユーザインタフェース48及びディスプレイ50を含む。ユーザインタフェース48は、キーボード及び/またはマウス、並びに再構成画像のハードコピーを再製させるためのプリンタその他の周辺装置などの別のデバイスを含むことがある。ディスプレイ50は、以前に収集した画像を表示するための第1のスクリーンと、1つまたは複数の手術中画像を表示するための第2のスクリーンと、を含むことがある。
【0022】
上で言及したように具体的な一実施形態では、EMセンサアセンブリ12〜18の各々は、EM場の完全性を監視するために2つのEMセンサを備えることがある。図2は、本技法の一実施形態による2つのEMセンサを備えるように第1のEMセンサアセンブリ12を表している。図示した実施形態では、第1のEMセンサアセンブリ12は主EMセンサ52及び基準EMセンサ54を備える。EMセンサ52、54の各々は身体56上に装着されている。アセンブリ内での2つのセンサ間の距離は固定であるため、EM場の完全性並びにシステム10自体の適正な動作の監視のために基準EMセンサ54を使用することができる。主EMセンサ52及び/または基準EMセンサ54を用いてEM場の完全性を監視するためには適当な任意の技法を使用することができる。磁場完全性検出のために2つのセンサを備えたセンサアセンブリの使用については、参照によりその全体を本明細書に組み入れるものとする米国特許第5,676,673号に詳細に記載されている。
【0023】
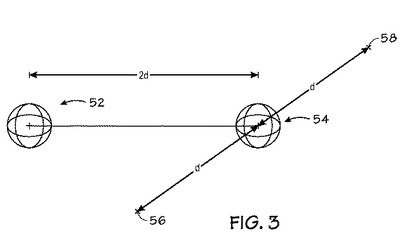
具体的な一実施形態では、電磁場の完全性は2つ以上の仮想点の箇所を監視することによって監視されることがある。図3で示したように、第1の仮想点56は2つのセンサにより規定されるX−Z面の間に規定されることがあり、かつ第2の仮想点58は2つのセンサにより規定されるX−Z面の外部に規定されることがある。一実施形態では、基準EMセンサ54から第1の仮想点56へのベクトルの大きさは、基準EMセンサ54から第2の仮想点58へのベクトルの大きさと同じとすることがある、ただし方向は反対である。この大きさは、主EMセンサ52と基準EMセンサ54の間の距離の概ね半分とすることがある。これらの2つの仮想点56、58の箇所は、連続して計算されると共に工場較正時など無歪み環境で決定した確定箇所と比較されることがある。いずれか一方の仮想点に関する計測箇所と確定箇所の間の距離がしきい値を超える場合、磁場完全性違反が通報されることがある。仮想点に関する計測箇所と確定箇所の間のこの距離のことを、本明細書において「磁場完全性値」と呼ぶことにする。
【0024】
第1及び第2のEMセンサアセンブリ12、14の箇所を表す信号が収集されることがあることは当業者であれば理解されよう。例えば第1及び第2のEMセンサアセンブリ12、14がEM受信器の役割をするケースでは、患者32に対して固定とさせた送信器の役割をさせ得る第3のEMセンサアセンブリ16から信号を受信することがある。別法として、第1及び第2のEMセンサアセンブリ12、14がEM送信器の役割をするケースでは、患者32に対して固定とさせた受信器の役割をさせ得る第3のEMセンサアセンブリ16に信号を送信することがある。次いで、収集したEM信号を適当に処理して例えばX、Y及びZ座標並びにピッチ角、偏揺れ角及び横転角を含む位置及び方向などEMセンサアセンブリの各々の箇所を決定することがある。第1及び第2のEMセンサアセンブリ12、14はC字アーム26に対して固定であるため、これらのセンサアセンブリの箇所が決定されれば、C字アーム26の位置及び方向を決定することができる。
【0025】
しかし、臨床環境内に磁場歪曲物体が存在すると電磁場に歪みが生じるのが典型的であることが理解されよう。例えばその磁場歪曲物体は、テーブル、フィクスチャ、ツール、電子機器、撮像システムの1つまたは複数の構成要素(例えば、C字アーム)であることがある。歪みマップ(例えば、有歪みと無歪みのセンサ位置及び方向を相互対照するルックアップテーブル)などある種の技法を用いてこれらの歪みを補償することができるが、これらの技法によっても補償されない歪みが存在することがある。さらに、第1及び第2のEMセンサアセンブリ12、14の各々に関する磁場強度と送信器−受信器間距離とは変動することがある。したがって、本システム10はC字アーム26に対して固定の複数のEMセンサアセンブリ(第1及び第2のセンサアセンブリ12、14など)を含むため、とりわけ磁場歪みに由来してC字アーム26に対する2つの異なる箇所を決定することができる。換言すると、第1のセンサアセンブリ12に関する決定箇所に基づいて第1のC字アーム位置及び方向を決定することができ、かつ第2のセンサアセンブリ14の箇所に基づいて第2のC字アーム位置及び方向を決定することができる。解剖学画像上へのデバイス箇所の投射は少なくともその一部でC字アーム26の決定された位置及び方向に基づくため、画像上に表された精細なデバイス箇所はC字アーム位置及び方向の決定にどのセンサアセンブリを用いたかに基づいて異なることになる。
【0026】
デバイス箇所を解剖学画像上に正確に投射させるべきであることに留意すべきである。したがって、本技法の一実施形態は、第1及び第2のEMセンサアセンブリ12、14などの複数のEMセンサから最適なEMセンサを選択するための技法を提供する。本明細書ではセンサ間での識別及び選択に言及しているが、実施にあたっては、本明細書に記載したシステムは典型的にはすべてのセンサから信号を収集し、次いでどの信号またはどのセンサがトラッキング機能やナビゲーション機能で使用するのに最も望ましいすなわち高信頼の信号を生成するかを選択することになることは当業者であれば理解されよう。少なくともその一部で選択したEMセンサに基づいて、解剖学画像上にデバイス箇所を投射させることができる。
【0027】
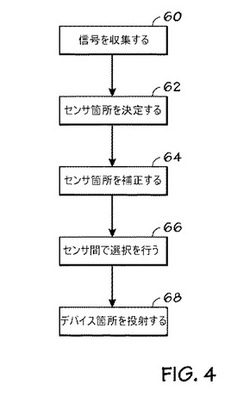
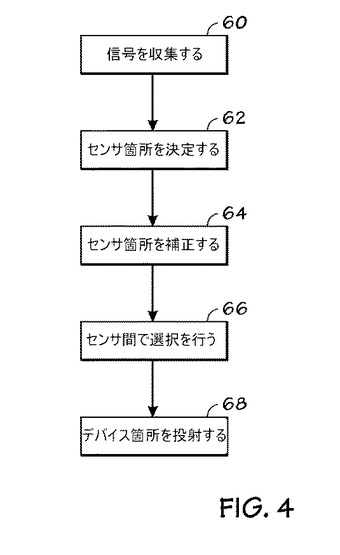
ここで図4を参照すると、本発明の実施形態に従って複数のEMセンサから最適なEMセンサを選択するための例示的な一技法を表している。ブロック60に示すように、磁場の存在下で複数のEMセンサの各々の箇所を表す信号を収集することがある。これらの複数のEMセンサはC字アーム26に対して固定とさせることがある。一例として、第1及び第2のアセンブリ12、14の箇所を表す信号を収集することがある。第1及び第2のEMセンサアセンブリ12、14がEM受信器の役割をするケースでは、患者32に対して固定とさせた送信器の役割をさせ得る第3のEMセンサアセンブリ16からの信号を第1及び第2のEMセンサアセンブリ12、14によって受信することがある。例えば第3のEMセンサアセンブリは3軸の送信コイル組を備えることがあり、また第1及び第2のセンサアセンブリ12、14の各々は3軸の受信器コイル組を備えることがある。各送信コイルは時間変動する磁場が生成されるように付勢されることがある。次いで、この時間変動磁場に応答して受信器コイル内に計測可能な電圧が誘導される。したがって、送信コイル内の電流の変化率と受信器コイル内に誘導される電圧との比によって相互インダクタンスが計測されることがある。別法として、第1及び第2のEMセンサアセンブリ12、14がEM送信器の役割をするケースでは、患者に対して固定とさせた受信器の役割をさせ得る第3のEMセンサアセンブリ16に信号が送信されることがある。
【0028】
次いで収集したEM信号を適当に処理し、ブロック62に示すように複数のEMセンサの各々の箇所を決定する。例えば、収集した信号を処理して、X、Y及びZ座標並びにピッチ角、偏揺れ角及び横転角を含む第1及び第2のセンサアセンブリ12、14の各々の位置及び方向を決定することがある。
【0029】
具体的な一実現形態では、複数のEMセンサの各々に関する決定箇所がブロック64に示すように歪みに関して補正を受けることがある。この歪み補正には歪みマップを用いることがあることは当業者であれば理解されよう。一実施形態ではその歪みマップは、無歪みのセンサ位置及び方向を、例えば有歪みのセンサ位置及び方向または有歪みの相互インダクタンスと相互対照するルックアップテーブルを含むことがある。
【0030】
上で言及したように、複数のEMセンサはC字アーム26に対して固定とさせることがある。したがって、複数のEMセンサの各々を基準としてC字アーム26の位置及び方向を決定することができる。解剖学画像上へのデバイス箇所の投射は少なくともその一部でC字アーム26の決定した位置及び方向に基づくため、画像上に投射された精細なデバイス箇所はC字アーム位置及び方向の決定のために複数のEMセンサのどれを用いたかに基づいて異なることになる。
【0031】
したがって、本技法はブロック66に示したように、1つまたは複数の品質計測値に基づいて複数のEMセンサ間での選択を行っている。EMセンサが選択された後、次いでこの選択センサに基づいてC字アーム位置及び方向が決定されることがある。一方、少なくともその一部で選択したEMセンサに基づいて次いで解剖学画像上にデバイス箇所を投射させる(ブロック68)ことがある。例えば選択したセンサは、デバイス座標系から画像座標系への変換に使用されることがある。この変換は、第3のEMセンサアセンブリ16など患者に対して固定のセンサ座標系に対するデバイス先端の較正で開始させることがある。次いでこのデバイス先端を、第1のセンサアセンブリ14や第2のセンサアセンブリ16などの撮像システムに対して固定の選択センサ座標系に変換することがある。次にこのデバイス先端位置は、選択したC字アームセンサ間での画像座標系への事前決定の変換に基づいて2Dまたは3D画像上に投射させることがある。
【0032】
送信器−受信器間距離、磁場強度、EM場の完全性、及びこれらの組み合わせを含む最適なEMセンサの選択では、多種多様な品質計測値のうちのいずれを用いることもある。最適なEMセンサを選択する際に用い得る品質計測値の1つは送信器−受信器間距離である。送信器−受信器間距離が増大すると信号対雑音比が悪化することが理解されよう。一実施形態では、複数のEMセンサのうち送信器−受信器間距離が最短のEMセンサが選択されることがある。別の実施形態では、複数のEMセンサの各々に関する送信器−受信器間距離を距離しきい値と比較することがある。具体的な一実施形態では、約3インチ(概ね75mm)〜約18インチ(概ね500mm)の範囲の距離しきい値を用いることがある。しかし当業者であれば、具体的な受信器/送信器配列に対する距離しきい値は多くの要因に基づいて異なることになると共に、具体的なある実現形態では18インチを超えることもあることを理解されよう。
【0033】
一例として、第1のセンサアセンブリ12に関する送信器−受信器間距離が、距離しきい値と、また第2のセンサアセンブリ14に関する送信器−受信器間距離と比較されることがある。この距離は、具体的なあるセンサアセンブリ上に包含されたEMセンサから対応するEM送信器またはEM受信器(場合に応じていずれか)までの距離であることが理解されよう。そのセンサアセンブリが例えば上で検討したような主EMセンサと基準EMセンサという2つのEMセンサを包含していれば、送信器−受信器間距離は主EMセンサから決定されることがある。一実施形態では、当該EMセンサに関する送信器−受信器間距離が距離しきい値を超えていれば、当該EMセンサを選択しないことがある。複数のEMセンサの各々に関する送信器−受信器間距離が距離しきい値を超えている場合は、その送信器−受信器間距離が最短であるEMセンサが選択されることがある。幾つかの実施形態では、複数のEMセンサのうちの少なくとも2つのセンサに関する送信器−受信器間距離を距離しきい値以内とさせることがある。これらの実施形態では、最適なEMセンサを選択するために次いで追加的な品質計測値を用いることがある。具体的な一実施形態では、その送信器−受信器間距離が最短であるEMセンサが選択されることがある。
【0034】
複数のEMセンサから最適なEMセンサを選択する際に、送信器−受信器間距離に加えて磁場強度も使用することがある。一実施形態では、磁場強度が複数のEMセンサの各々を用いて決定されることがある。例えば磁場強度は、第1のEMセンサアセンブリ12を用いて決定されることがあり、また第2のEMセンサアセンブリ14を用いて決定されることもある。こうした決定の後、複数のEMセンサの各々に関して計測される磁場強度が複数のEMセンサのうちの別のEMセンサの磁場強度と比較されることがある。一実施形態では、磁場強度が最も強いEMセンサを最適なセンサとして選択することがある。幾つかの実施形態では、複数のEMセンサから最適なEMセンサを選択する際に、送信器−受信器間距離やEM場完全性などの別の品質計測値のうちの1つと連係してこの決定した磁場強度を用いることがある。
【0035】
さらに、複数のEMセンサから最適なEMセンサを選択する際にEM場の完全性も使用されることがある。上で言及したように、幾つかの実施形態ではそのEM場の完全性は、EMセンサアセンブリの各々内にそれぞれのセンサアセンブリ内の主EMセンサに対して固定の基準EMセンサを含めることによって監視されることがある。一実施形態ではそのEM場の完全性は、当該EMアセンブリ内のEMセンサの各々に関する2つ以上の仮想点の箇所を監視することによって監視されることがある。これらの仮想点を用いて、アセンブリ内の具体的なあるEMセンサに関する各仮想点ごとに磁場完全性値を決定することがある。具体的な一実現形態では、具体的なあるEMセンサに関する磁場完全性値を事前設定のしきい値と比較することがある。一例として、第1のセンサアセンブリ12に関して監視した仮想点の各々に対する磁場完全性値を、事前設定のしきい値と、また第2のセンサアセンブリに関する磁場完全性値と比較することがある。一実施形態では、当該EMセンサに関する磁場完全性値が事前設定のしきい値を超える場合、当該EMセンサは選択されることがない。幾つかの実施形態では、複数のEMセンサのうちの少なくとも2つのセンサに関する磁場完全性値を事前設定のしきい値未満とさせることがある。これらの実施形態では、最適なEMセンサを選択するために次いで追加的な品質計測値を使用することがある。幾つかの実施形態では、複数のEMセンサから最適なEMセンサを選択する際に、磁場強度、送信器−受信器間距離及びEM場完全性などの別の品質計測値のうちの1つと連係して磁場完全性値を用いることがある。
【0036】
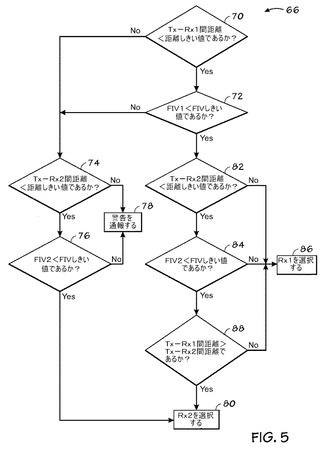
ここで図5を参照すると、全体を参照番号66で表した1つまたは複数の品質計測値に基づいて複数のEMセンサ間での選択を行うための流れ図を表している。図示した実施形態では、第1のセンサアセンブリ12と第2のセンサアセンブリ14の間での選択のために送信器−受信器間距離及び磁場完全性を使用している。これらの2つのセンサアセンブリ間での選択のためには、センサアセンブリの両方が一連の品質計測値と比較される。ブロック70に示したように、第1のEMセンサアセンブリ12内の主センサに関する送信器−受信器間距離が先ず距離しきい値と比較される。第1のセンサアセンブリ12に関する送信器−受信器間距離が距離しきい値未満であれば、次いで第1のセンサアセンブリ12に関する磁場完全性値が事前設定のしきい値と比較される(ブロック72)。
【0037】
図示した実施形態では、第1のセンサアセンブリ12に関する送信器−受信器間距離が距離しきい値を超えているか第1のセンサアセンブリ12に関する磁場完全性値が事前設定のしきい値を超えていれば、第1のセンサアセンブリ14は選択されず本技法はブロック74に移行する。したがって次いで第2のセンサアセンブリ14を一連の品質計測値と比較する必要がある。ブロック74に示したように、第2のセンサアセンブリ14に関する送信器−受信器間距離が先ず距離しきい値と比較される。第2のセンサアセンブリ14に関する送信器−受信器間距離が距離しきい値未満であれば、次いで第2のセンサアセンブリ14に関する磁場完全性値が事前設定のしきい値と比較される(ブロック76)。第2のセンサアセンブリ14について、ブロック74で決定した送信器−受信器間距離とブロック76で決定した磁場完全性値のいずれかがそれぞれのしきい値を超える場合、第2のセンサアセンブリを選択しないことがある。これに代えて、ブロック78に示すように警告が通報されることがある。しかし、第2のセンサアセンブリ14に関するこれらの品質計測値の両方がそれぞれのしきい値未満であれば、ブロック80に示すように第2のセンサアセンブリが選択されることがある。
【0038】
さらに、ブロック70及び72での決定に従って第1のセンサアセンブリ12に関する品質計測値の両方がそのそれぞれのしきい値未満であれば、次いで第2のセンサアセンブリ14が一連の品質計測値と比較される。ブロック82に示したように、第2のセンサアセンブリ14内の主センサに関する送信器−受信器間距離が先ず距離しきい値と比較される。第2のセンサアセンブリ14に関する送信器−受信器間距離が距離しきい値未満であれば、第2のセンサアセンブリ14に関する磁場完全性値が事前設定のしきい値と比較される(ブロック84)。第2のセンサアセンブリ14について、送信器−受信器間距離(ブロック82における決定による)と磁場完全性値(ブロック84における決定による)のいずれかがそのそれぞれのしきい値を超える場合、第2のセンサアセンブリを選択しないことがある。これに代えて、ブロック70及び72における決定に従って当該センサアセンブリに関する品質計測値が品質計測値のしきい値域内に見出されていた第1のセンサアセンブリ12が選択される(ブロック86)ことになる。しかし、第2のセンサアセンブリに関するこれらの品質計測値の両方がそのそれぞれのしきい値未満であれば、これらの2つのセンサアセンブリ間での選択のために追加的計測値が用いられることがある。例えば、第1のセンサアセンブリ12に関する送信器−受信器間距離が第2のセンサアセンブリに関する送信器−受信器間距離と比較されることがある(ブロック88)。図示したように、送信器−受信器間距離が最短であるセンサアセンブリが選択されることがある。信号対雑音比をより良好にするために、送信器−受信器間距離が最短のセンサアセンブリが選択されることがあることが理解されよう。例えば、第1のセンサアセンブリ12に関するこの距離が第2のセンサアセンブリ14に関するこの距離より短ければ、ブロック86に示すように第1のセンサアセンブリが選択されることがある。第1のセンサアセンブリ12に関するこの距離が第2のセンサアセンブリ14に関するこの距離より短くなければ、ブロック80に示すように第2のセンサアセンブリが選択されることがある。
【0039】
上述の実施形態では複数個のうちからの具体的な1つのEMセンサの選択について記載しているが、複数のEMセンサ間での選択にはセンサの各々からの計測値に対して重み付けアルゴリズムを適用することも包含されるものと理解されることに留意すべきである。例えば、複数のEMセンサの各々に関して画像座標系で決定したデバイス位置に対して重み付けアルゴリズムが適用されることがある。具体的な一実現形態では、送信器−受信器間距離が重み付けアルゴリズムの重みとして使用されることがある。例えば、第1及び第2のセンサアセンブリ12及び14のそれぞれに対する重みw1及びw2は次式のように規定されることがある。
【0040】
w1=d22/(d12+d22)
w2=d12/(d12+d22)
上式においてd1及びd2は、患者に対して固定のセンサアセンブリ16からの撮像システムに対して固定のセンサアセンブリ12及び14のそれぞれまでの送信器−受信器間距離である。
【0041】
したがって画像座標系におけるデバイス位置
【0042】
【数1】

は、2つのセンサアセンブリにより収集したデバイス投射情報
【0043】
【数2】
と
【0044】
【数3】
を結合させることによって決定することができる。
【0045】
【数4】
各センサアセンブリからの計測値を重み付けして結合させることによってナビゲーションシステムの頑強性を大幅に改善させ得ることが理解されよう。
【0046】
本発明のある種の特徴についてのみ本明細書において図示し説明してきたが、当業者によって多くの修正や変更がなされるであろう。したがって、添付の特許請求の範囲は、本発明の真の精神の範囲に属するこうした修正や変更のすべてを包含させるように意図したものであることを理解されたい。また、図面の符号に対応する特許請求の範囲中の符号は、単に本願発明の理解をより容易にするために用いられているものであり、本願発明の範囲を狭める意図で用いられたものではない。そして、本願の特許請求の範囲に記載した事項は、明細書に組み込まれ、明細書の記載事項の一部となる。
【図面の簡単な説明】
【0047】
【図1】本技法の一実現形態による例示的な撮像/トラッキングシステムの図である。
【図2】本技法の一実現形態による例示的なセンサアセンブリの図である。
【図3】本技法の一実現形態による誤差検出のための例示的なセンサアセンブリと連係した仮想点の利用について表した図である。
【図4】本技法の一実現形態による最適なEMセンサを選択するための例示的な技法のブロック図である。
【図5】本技法の一実現形態による最適なEMセンサを選択するために2つ以上の品質計測値を用いた例示的な技法のブロック図である。
【符号の説明】
【0048】
10 撮像/トラッキングシステム
12 第1のEMセンサアセンブリ
14 第2のEMセンサアセンブリ
16 第3のEMセンサアセンブリ
18 第4のEMセンサアセンブリ
20 X線蛍光透視システム
22 制御器
24 ワークステーション
26 C字アーム
28 X線放射源
30 X線放射検出器
32 患者
34 テーブル
36 医用デバイス
38 較正アセンブリ
40 インタフェース回路
42 中央処理回路
44 メモリ回路
46 ワークステーションインタフェース回路
48 ユーザインタフェース
50 ディスプレイ
52 主EMセンサ
54 基準EMセンサ
56 第1の仮想点
58 第2の仮想点
60 信号の収集
62 センサ箇所の決定
64 センサ箇所の補正
66 センサ間での選択
68 デバイス箇所の投射
70 第1のセンサアセンブリに関する送信器−受信器間距離のしきい値との比較
72 第1のセンサアセンブリに関する磁場完全性値のしきい値との比較
74 第2のセンサアセンブリに関する送信器−受信器間距離のしきい値との比較
76 第2のセンサアセンブリに関する磁場完全性値のしきい値との比較
78 警告の通報
80 第2のセンサアセンブリの選択
82 第2のセンサアセンブリに関する送信器−受信器間距離のしきい値との比較
84 第2のセンサアセンブリに関する磁場完全性値のしきい値との比較
86 第1のセンサアセンブリの選択
88 第1と第2のセンサアセンブリに関する送信器−受信器間距離の比較
【技術分野】
【0001】
本発明は、全般的には外科的介入その他の医学的手技向けなど磁場を用いたトラッキングシステムに関する。さらに詳細には、本発明は、複数の電磁気センサ位置を補正するための技法に関する。
【背景技術】
【0002】
トラッキングシステムは、患者の身体内への医用(例えば、外科用)デバイスの精細かつ迅速な配置を支援するための情報をオペレータ(例えば、医師)に提供するために使用されてきた。一般に、患者の解剖構造の描出を含む画像をオペレータに対して表示しており、この描出はデバイス箇所をその上に投射して表すシンボルまたは像を伴っている。デバイスは患者の身体を基準として位置決めされるため、表示させる画像は正確なデバイス箇所を反映するように更新される。患者解剖構造の画像は、医学的処置や外科的処置に先だって作成されることも、その途中で作成されることもある。さらに、X線、コンピュータ断層(CT)、磁気共鳴撮像(MRI)、陽電子放出断層(PET)、超音波、内視鏡、並びにUV、可視光及び赤外光スペクトルでの光学撮像など適当な任意の医用撮像技法が利用されることがある。
【0003】
既存の画像組に使用する場合、これら以前に記録しておいた診断画像組それ自体は、その精密なスキャン編成やその再構成アルゴリズムの空間演算のために3次元直線座標系を規定している。したがって、利用しているデバイスの外部座標を用いてデバイスの位置及び方向を正確に表すためには、画像の座標を利用中のデバイスの外部座標と相関させる必要がある。
【0004】
それぞれの座標間で変換を実施できるようにするため、ロボット機械的リンクや符号器によって様々な座標組を規定することがある、またより通常では、固定の患者支持体、該支持体に対して固定とし得るカメラなどの2つ以上の受信器、並びにデバイス上のガイドまたはフレームに取り付け患者支持体及びカメラフレームを基準としたデバイスの位置及び方向を三角測量によって自動的に決定できるようにした複数の信号伝達素子(例えば、電磁気センサ)によって様々な座標組が規定されることがある。2つのビデオカメラ及び複数の放出体その他の位置信号伝達素子を利用した3次元トラッキングシステムは一般に利用可能となって久しく、またこうした手術室系に容易に適合する。トラッキングを受けるマーカが診断画像内に現れると、手術室座標と画像の座標の間での変換を規定することが可能となる。
【0005】
典型的なトラッキングシステムの1つでは、1つの電磁気(「EM」)送信器を患者の身体に対して固定させ、1つのEM受信器をデバイスに対して固定させ、かつ別のEM受信器をX線蛍光透視システムのC字アームに対して固定させている。このEM送信器はEM受信器により検出される電磁場を発生させる。撮像システムに対して固定の受信器が受信した信号を適正に処理して受信器の位置及び方向を決定することができる。この受信器は撮像システムに対して固定であるため、受信器を用いてC字アームの位置及び方向を決定することができる。したがって、デバイスに対して固定の受信器が受信した信号が処理された後、デバイス受信器の位置及び方向を撮像システムと相関させ、デバイスの位置及び方向を診断画像上に投射させることができる。
【0006】
患者解剖構造の診断画像に対する相関は多くの要因により複雑化することがあることが理解されよう。例えば、磁場歪曲物体(例えば、C字アーム、X線検出器あるいは外科用テーブル)が存在するとEM送信器から放出された磁場に歪みが生じ、これによりこの磁場の大きさ及び方向が変化することがある。例えば、別の発生源からの信号が存在すると、伝導性物体内のうず電流の磁場、あるいは強磁性体の磁場歪曲効果によってこうした歪みが生じる可能性がある。これらの歪みは補償しないと、受信器が計測した位置及び方向に誤差を生じることになる。一般に歪みマップを使用するとある種の歪み物体は補償されるが、既存の技法を用いたのでは歪みのすべてを完全に補償できないことがある。換言すると、歪みマップにより補償されずにある程度の残留歪みが存在することがある。さらに、送信器と受信器の間の距離が増大すると、検知したデータの信号対雑音比が悪化する。例えば、送信器−受信器間距離が約18インチ(概ね500mm)を超える大きさであると、既存のテクノロジーによるある種の実現形態ではデータが信頼できなくなることがある。このため、送信器−受信器間距離が大きい(例えば、C字アームを動かすため)場合、C字アームに関して高信頼の位置及び方向が得られないことがある。C字アームに関する位置及び方向が信頼できないと、デバイス位置及び方向を診断画像上に正確に投射できないことがある。
【0007】
したがって、撮像システムに対して固定の複数のEM受信器を利用するトラッキングシステムを用いてこれらの複雑化要因に対処することがある。例えば、未補償歪みがEM受信器のすべてに対して同じ影響を及ぼさず、受信器のうちの1つまたは幾つかでは受容可能なデータを返すが受信器のうちの1つではそうでないことがあり得る。また一方、そのC字アームの位置に応じてEM受信器のうちの1つは受容可能な送信器−受信器間距離を有するが別の受信器はそうでないことがあり得る。しかし、従来の技法は全般的にはC字アームに対して固定の単一のEM受信器を含むようなトラッキングシステム向けに設計されている。
【特許文献1】米国特許第5,676,673号
【発明の開示】
【発明が解決しようとする課題】
【0008】
したがって、磁場歪みを補正するための改良技法に対する要求が存在する。具体的には、複数のEM受信器を利用したトラッキングシステムにおいて磁場歪みを補正する技法に対する要求が存在する。
【課題を解決するための手段】
【0009】
本技法は、複数のEMセンサを含むトラッキングシステムにおいて磁場歪みを補正するための改良技法を提供する。一実施形態では、本技法は1つまたは複数の電磁場歪みを補正するのに最適なEMセンサを選択する方法を提供する。本方法は、EM場の存在下で複数のEMセンサの箇所を表す信号を収集する工程を含む。本方法はさらに、1つまたは複数の品質計測値に基づいて複数のEMセンサからの信号間で選択を行う工程を含む。
【0010】
別の実施形態では、本技法は1つまたは複数の電磁場歪みを補正するのに最適なEMセンサを選択するためのシステムを提供する。本システムは、複数のEMセンサと、該複数のEMセンサの各々の箇所を表す信号を送信または受信するための追加的EMセンサと、を含む。本システムはさらに、複数のEMセンサの箇所を表す信号を収集すると共に、1つまたは複数の品質計測値に基づいて該複数のEMセンサからの信号間で選択を行うように構成させた制御器を含む。
【0011】
別の実施形態では、本技法は、1つまたは複数の電磁場歪みを補正するのに最適なEMセンサを選択するためのコンピュータ読み取り可能媒体上に保存したコンピュータプログラムを提供する。本コンピュータプログラムは複数のEMセンサの各々を表す信号を収集するように製作し配列させている。さらに、本コンピュータプログラムはまた、1つまたは複数の品質計測値に基づいて該複数のEMセンサからの信号間で選択を行うように製作し配列させている。
【発明を実施するための最良の形態】
【0012】
本発明に関するこれらの特徴、態様及び利点、並びにその他の特徴、態様及び利点については、同じ参照符号が図面全体を通じて同じ部分を表している添付の図面を参照しながら以下の詳細な説明を読むことによってより理解が深まるであろう。
【0013】
ここで図1を参照すると、撮像/トラッキングシステム10を表している。図示した実施形態では、撮像/トラッキングシステム10は、複数のEMセンサアセンブリ12、14、16及び18を含むトラッキング構成要素を備える。さらに撮像/トラッキングシステム10は、画像データを収集し処理するためのX線蛍光透視システム20を含む。図示したように、撮像/トラッキングシステム10はさらに制御器22及びワークステーション24を含む。
【0014】
上で指摘したように、本検討においては特にX線撮像システム(具体的には、蛍光透視システム)に言及しているが、本発明をこれらの種類や任意の特定の種類の撮像システムや撮像様式に限定しようと意図していないことを理解されたい。したがって、本技法はリアルタイムで(またさらには、外科的介入その他の手技に先だって収集した画像と共に)用いられる別の撮像様式と連係させた器具の位置に関するトラッキング、解析及び表示のために使用されることがある。
【0015】
X線蛍光透視システム20は、C字アーム26、X線放射源28及びX線検出器30を含むC字アームシステムとして図示している。X線放射源28はC字アーム26上に装着されており、またX線検出器30はX線放射源28と反対側でC字アーム26上に装着されている。幾つかのシステムではX線放射源28とX線検出器30は固定状態であるが、典型的な蛍光透視システムではC字アーム26によってX線放射源28及びX線検出器30を患者32の周りで移動可能とさせている。動作時において、X線放射源28はX線蛍光透視に適した放射ストリームを放出する。X線検出器30はテーブル34上に配置させた患者32を通過したX線源28からの放射ストリームの一部を受け取る。X線検出器30はこの放射ストリームの強度を表す電気信号を発生させる。これらの信号を適正に収集し処理して対象内のフィーチャの画像を再構成できることは当業者であれば理解されよう。
【0016】
複数のEMセンサアセンブリを蛍光透視システムに対して固定とさせることがある。図示した実施形態では、第1及び第2のセンサアセンブリ12、14を、X線蛍光透視システム20のX線検出器30上に固定した較正アセンブリ38に固定とさせている。第3のEMセンサアセンブリ16は患者32に対して固定とさせることがある。図示したように、第3のEMセンサアセンブリ16は患者32上に固定させている。第4のEMセンサアセンブリ18は医用(例えば、外科用)デバイス36に対して固定させることがある。図示した実施形態では、第2のEMセンサアセンブリ14が医用デバイス36の操作端部に装着されている。デバイス36は医学的手技での使用に適当した任意のデバイスとすることができる。例えばデバイス36は、ドリル、ガイドワイヤ、カテーテル、内視鏡、腹腔鏡、バイオプシー針、アブレーションデバイス、あるいは同様の別のデバイスとすることができる。
【0017】
一般に、EMセンサアセンブリ12〜18の各々は少なくとも1つのEMセンサを備える。具体的な一実現形態では、EMセンサアセンブリ12〜18の各々は、電磁場の完全性を監視するために2つのEMセンサを備えることがある。図2は、本技法の一実施形態による2つのEMセンサを備えるように第1のEMセンサアセンブリ12を表している。
【0018】
再度図1を参照すると、EMセンサアセンブリ12〜18の各々に含まれている1つまたは複数のEMセンサは当業者であれば理解されようにEM受信器またはEM送信器として実現させることがある。一実施形態では、第3のEMセンサアセンブリ16はEM送信器を含むことがあり、一方残りのEMセンサアセンブリ12、14及び18はそれぞれ1つのEM受信器を含むことがある。この実施形態では、デバイス36に対して固定とした第4のEMセンサアセンブリ18により検知した信号は、デバイス36の箇所(例えば、X、Y及びZ座標並びにピッチ角、偏揺れ角及び横転角を含む位置及び方向)の決定に使用されることがある。同様に、第1及び第2のEMセンサアセンブリ12、14により検知した信号はそれぞれのセンサアセンブリの箇所の決定に使用されることがある。2つのEMセンサは、受信器に対するものか送信器に対するものかに関わりなくその相互インダクタンスは同じであることが理解されよう。したがって、EM受信器と送信器に関する相対的配置及び機能は逆にすることができる。例えば、EM受信器を患者32に対して固定とさせることがあり、一方EM送信器はデバイス36及びC字アーム26に対して固定とさせることがある。
【0019】
本技法では、位置検出をその内部で実現できる磁場を発生させるようにEMセンサを使用するのに適した任意の技法を利用することができる。一例として、直角に配置させた3つの磁気双極子(例えば、電流ループまたは電磁石)を含め第3のEMセンサアセンブリ16を磁場発生器として利用することがある。双極子の各々が発生させる電磁場は、位相、周波数、時分割多重、その他に関して互いに識別可能である。座標決定に対して電磁場の近磁場特性を使用できることは当業者であれば理解されよう。
【0020】
図示した実施形態では制御器22は、トラッキングデータ及び撮像データを受信するためのインタフェース回路40と、処理回路42と、メモリ回路44と、ワークステーション24と連絡させたワークステーションインタフェース回路40と、を含む。制御器22を実現するために1つまたは複数のコンピュータを用いることがあることが理解されよう。一般に処理回路42(典型的には、ディジタル信号プロセッサ、CPU、その他を含むことになる)は、デバイス36の箇所を診断画像上に投射できるようにトラッキングデータを処理することができる。さらに処理回路42はまた、データを意味のある診断画像に再構成するように撮像データを処理することができる。メモリ回路44は撮像データ及びトラッキングデータ並びにその他のシステムパラメータを保存する役割をすることができる。
【0021】
図示したように、ワークステーション24はユーザインタフェース48及びディスプレイ50を含む。ユーザインタフェース48は、キーボード及び/またはマウス、並びに再構成画像のハードコピーを再製させるためのプリンタその他の周辺装置などの別のデバイスを含むことがある。ディスプレイ50は、以前に収集した画像を表示するための第1のスクリーンと、1つまたは複数の手術中画像を表示するための第2のスクリーンと、を含むことがある。
【0022】
上で言及したように具体的な一実施形態では、EMセンサアセンブリ12〜18の各々は、EM場の完全性を監視するために2つのEMセンサを備えることがある。図2は、本技法の一実施形態による2つのEMセンサを備えるように第1のEMセンサアセンブリ12を表している。図示した実施形態では、第1のEMセンサアセンブリ12は主EMセンサ52及び基準EMセンサ54を備える。EMセンサ52、54の各々は身体56上に装着されている。アセンブリ内での2つのセンサ間の距離は固定であるため、EM場の完全性並びにシステム10自体の適正な動作の監視のために基準EMセンサ54を使用することができる。主EMセンサ52及び/または基準EMセンサ54を用いてEM場の完全性を監視するためには適当な任意の技法を使用することができる。磁場完全性検出のために2つのセンサを備えたセンサアセンブリの使用については、参照によりその全体を本明細書に組み入れるものとする米国特許第5,676,673号に詳細に記載されている。
【0023】
具体的な一実施形態では、電磁場の完全性は2つ以上の仮想点の箇所を監視することによって監視されることがある。図3で示したように、第1の仮想点56は2つのセンサにより規定されるX−Z面の間に規定されることがあり、かつ第2の仮想点58は2つのセンサにより規定されるX−Z面の外部に規定されることがある。一実施形態では、基準EMセンサ54から第1の仮想点56へのベクトルの大きさは、基準EMセンサ54から第2の仮想点58へのベクトルの大きさと同じとすることがある、ただし方向は反対である。この大きさは、主EMセンサ52と基準EMセンサ54の間の距離の概ね半分とすることがある。これらの2つの仮想点56、58の箇所は、連続して計算されると共に工場較正時など無歪み環境で決定した確定箇所と比較されることがある。いずれか一方の仮想点に関する計測箇所と確定箇所の間の距離がしきい値を超える場合、磁場完全性違反が通報されることがある。仮想点に関する計測箇所と確定箇所の間のこの距離のことを、本明細書において「磁場完全性値」と呼ぶことにする。
【0024】
第1及び第2のEMセンサアセンブリ12、14の箇所を表す信号が収集されることがあることは当業者であれば理解されよう。例えば第1及び第2のEMセンサアセンブリ12、14がEM受信器の役割をするケースでは、患者32に対して固定とさせた送信器の役割をさせ得る第3のEMセンサアセンブリ16から信号を受信することがある。別法として、第1及び第2のEMセンサアセンブリ12、14がEM送信器の役割をするケースでは、患者32に対して固定とさせた受信器の役割をさせ得る第3のEMセンサアセンブリ16に信号を送信することがある。次いで、収集したEM信号を適当に処理して例えばX、Y及びZ座標並びにピッチ角、偏揺れ角及び横転角を含む位置及び方向などEMセンサアセンブリの各々の箇所を決定することがある。第1及び第2のEMセンサアセンブリ12、14はC字アーム26に対して固定であるため、これらのセンサアセンブリの箇所が決定されれば、C字アーム26の位置及び方向を決定することができる。
【0025】
しかし、臨床環境内に磁場歪曲物体が存在すると電磁場に歪みが生じるのが典型的であることが理解されよう。例えばその磁場歪曲物体は、テーブル、フィクスチャ、ツール、電子機器、撮像システムの1つまたは複数の構成要素(例えば、C字アーム)であることがある。歪みマップ(例えば、有歪みと無歪みのセンサ位置及び方向を相互対照するルックアップテーブル)などある種の技法を用いてこれらの歪みを補償することができるが、これらの技法によっても補償されない歪みが存在することがある。さらに、第1及び第2のEMセンサアセンブリ12、14の各々に関する磁場強度と送信器−受信器間距離とは変動することがある。したがって、本システム10はC字アーム26に対して固定の複数のEMセンサアセンブリ(第1及び第2のセンサアセンブリ12、14など)を含むため、とりわけ磁場歪みに由来してC字アーム26に対する2つの異なる箇所を決定することができる。換言すると、第1のセンサアセンブリ12に関する決定箇所に基づいて第1のC字アーム位置及び方向を決定することができ、かつ第2のセンサアセンブリ14の箇所に基づいて第2のC字アーム位置及び方向を決定することができる。解剖学画像上へのデバイス箇所の投射は少なくともその一部でC字アーム26の決定された位置及び方向に基づくため、画像上に表された精細なデバイス箇所はC字アーム位置及び方向の決定にどのセンサアセンブリを用いたかに基づいて異なることになる。
【0026】
デバイス箇所を解剖学画像上に正確に投射させるべきであることに留意すべきである。したがって、本技法の一実施形態は、第1及び第2のEMセンサアセンブリ12、14などの複数のEMセンサから最適なEMセンサを選択するための技法を提供する。本明細書ではセンサ間での識別及び選択に言及しているが、実施にあたっては、本明細書に記載したシステムは典型的にはすべてのセンサから信号を収集し、次いでどの信号またはどのセンサがトラッキング機能やナビゲーション機能で使用するのに最も望ましいすなわち高信頼の信号を生成するかを選択することになることは当業者であれば理解されよう。少なくともその一部で選択したEMセンサに基づいて、解剖学画像上にデバイス箇所を投射させることができる。
【0027】
ここで図4を参照すると、本発明の実施形態に従って複数のEMセンサから最適なEMセンサを選択するための例示的な一技法を表している。ブロック60に示すように、磁場の存在下で複数のEMセンサの各々の箇所を表す信号を収集することがある。これらの複数のEMセンサはC字アーム26に対して固定とさせることがある。一例として、第1及び第2のアセンブリ12、14の箇所を表す信号を収集することがある。第1及び第2のEMセンサアセンブリ12、14がEM受信器の役割をするケースでは、患者32に対して固定とさせた送信器の役割をさせ得る第3のEMセンサアセンブリ16からの信号を第1及び第2のEMセンサアセンブリ12、14によって受信することがある。例えば第3のEMセンサアセンブリは3軸の送信コイル組を備えることがあり、また第1及び第2のセンサアセンブリ12、14の各々は3軸の受信器コイル組を備えることがある。各送信コイルは時間変動する磁場が生成されるように付勢されることがある。次いで、この時間変動磁場に応答して受信器コイル内に計測可能な電圧が誘導される。したがって、送信コイル内の電流の変化率と受信器コイル内に誘導される電圧との比によって相互インダクタンスが計測されることがある。別法として、第1及び第2のEMセンサアセンブリ12、14がEM送信器の役割をするケースでは、患者に対して固定とさせた受信器の役割をさせ得る第3のEMセンサアセンブリ16に信号が送信されることがある。
【0028】
次いで収集したEM信号を適当に処理し、ブロック62に示すように複数のEMセンサの各々の箇所を決定する。例えば、収集した信号を処理して、X、Y及びZ座標並びにピッチ角、偏揺れ角及び横転角を含む第1及び第2のセンサアセンブリ12、14の各々の位置及び方向を決定することがある。
【0029】
具体的な一実現形態では、複数のEMセンサの各々に関する決定箇所がブロック64に示すように歪みに関して補正を受けることがある。この歪み補正には歪みマップを用いることがあることは当業者であれば理解されよう。一実施形態ではその歪みマップは、無歪みのセンサ位置及び方向を、例えば有歪みのセンサ位置及び方向または有歪みの相互インダクタンスと相互対照するルックアップテーブルを含むことがある。
【0030】
上で言及したように、複数のEMセンサはC字アーム26に対して固定とさせることがある。したがって、複数のEMセンサの各々を基準としてC字アーム26の位置及び方向を決定することができる。解剖学画像上へのデバイス箇所の投射は少なくともその一部でC字アーム26の決定した位置及び方向に基づくため、画像上に投射された精細なデバイス箇所はC字アーム位置及び方向の決定のために複数のEMセンサのどれを用いたかに基づいて異なることになる。
【0031】
したがって、本技法はブロック66に示したように、1つまたは複数の品質計測値に基づいて複数のEMセンサ間での選択を行っている。EMセンサが選択された後、次いでこの選択センサに基づいてC字アーム位置及び方向が決定されることがある。一方、少なくともその一部で選択したEMセンサに基づいて次いで解剖学画像上にデバイス箇所を投射させる(ブロック68)ことがある。例えば選択したセンサは、デバイス座標系から画像座標系への変換に使用されることがある。この変換は、第3のEMセンサアセンブリ16など患者に対して固定のセンサ座標系に対するデバイス先端の較正で開始させることがある。次いでこのデバイス先端を、第1のセンサアセンブリ14や第2のセンサアセンブリ16などの撮像システムに対して固定の選択センサ座標系に変換することがある。次にこのデバイス先端位置は、選択したC字アームセンサ間での画像座標系への事前決定の変換に基づいて2Dまたは3D画像上に投射させることがある。
【0032】
送信器−受信器間距離、磁場強度、EM場の完全性、及びこれらの組み合わせを含む最適なEMセンサの選択では、多種多様な品質計測値のうちのいずれを用いることもある。最適なEMセンサを選択する際に用い得る品質計測値の1つは送信器−受信器間距離である。送信器−受信器間距離が増大すると信号対雑音比が悪化することが理解されよう。一実施形態では、複数のEMセンサのうち送信器−受信器間距離が最短のEMセンサが選択されることがある。別の実施形態では、複数のEMセンサの各々に関する送信器−受信器間距離を距離しきい値と比較することがある。具体的な一実施形態では、約3インチ(概ね75mm)〜約18インチ(概ね500mm)の範囲の距離しきい値を用いることがある。しかし当業者であれば、具体的な受信器/送信器配列に対する距離しきい値は多くの要因に基づいて異なることになると共に、具体的なある実現形態では18インチを超えることもあることを理解されよう。
【0033】
一例として、第1のセンサアセンブリ12に関する送信器−受信器間距離が、距離しきい値と、また第2のセンサアセンブリ14に関する送信器−受信器間距離と比較されることがある。この距離は、具体的なあるセンサアセンブリ上に包含されたEMセンサから対応するEM送信器またはEM受信器(場合に応じていずれか)までの距離であることが理解されよう。そのセンサアセンブリが例えば上で検討したような主EMセンサと基準EMセンサという2つのEMセンサを包含していれば、送信器−受信器間距離は主EMセンサから決定されることがある。一実施形態では、当該EMセンサに関する送信器−受信器間距離が距離しきい値を超えていれば、当該EMセンサを選択しないことがある。複数のEMセンサの各々に関する送信器−受信器間距離が距離しきい値を超えている場合は、その送信器−受信器間距離が最短であるEMセンサが選択されることがある。幾つかの実施形態では、複数のEMセンサのうちの少なくとも2つのセンサに関する送信器−受信器間距離を距離しきい値以内とさせることがある。これらの実施形態では、最適なEMセンサを選択するために次いで追加的な品質計測値を用いることがある。具体的な一実施形態では、その送信器−受信器間距離が最短であるEMセンサが選択されることがある。
【0034】
複数のEMセンサから最適なEMセンサを選択する際に、送信器−受信器間距離に加えて磁場強度も使用することがある。一実施形態では、磁場強度が複数のEMセンサの各々を用いて決定されることがある。例えば磁場強度は、第1のEMセンサアセンブリ12を用いて決定されることがあり、また第2のEMセンサアセンブリ14を用いて決定されることもある。こうした決定の後、複数のEMセンサの各々に関して計測される磁場強度が複数のEMセンサのうちの別のEMセンサの磁場強度と比較されることがある。一実施形態では、磁場強度が最も強いEMセンサを最適なセンサとして選択することがある。幾つかの実施形態では、複数のEMセンサから最適なEMセンサを選択する際に、送信器−受信器間距離やEM場完全性などの別の品質計測値のうちの1つと連係してこの決定した磁場強度を用いることがある。
【0035】
さらに、複数のEMセンサから最適なEMセンサを選択する際にEM場の完全性も使用されることがある。上で言及したように、幾つかの実施形態ではそのEM場の完全性は、EMセンサアセンブリの各々内にそれぞれのセンサアセンブリ内の主EMセンサに対して固定の基準EMセンサを含めることによって監視されることがある。一実施形態ではそのEM場の完全性は、当該EMアセンブリ内のEMセンサの各々に関する2つ以上の仮想点の箇所を監視することによって監視されることがある。これらの仮想点を用いて、アセンブリ内の具体的なあるEMセンサに関する各仮想点ごとに磁場完全性値を決定することがある。具体的な一実現形態では、具体的なあるEMセンサに関する磁場完全性値を事前設定のしきい値と比較することがある。一例として、第1のセンサアセンブリ12に関して監視した仮想点の各々に対する磁場完全性値を、事前設定のしきい値と、また第2のセンサアセンブリに関する磁場完全性値と比較することがある。一実施形態では、当該EMセンサに関する磁場完全性値が事前設定のしきい値を超える場合、当該EMセンサは選択されることがない。幾つかの実施形態では、複数のEMセンサのうちの少なくとも2つのセンサに関する磁場完全性値を事前設定のしきい値未満とさせることがある。これらの実施形態では、最適なEMセンサを選択するために次いで追加的な品質計測値を使用することがある。幾つかの実施形態では、複数のEMセンサから最適なEMセンサを選択する際に、磁場強度、送信器−受信器間距離及びEM場完全性などの別の品質計測値のうちの1つと連係して磁場完全性値を用いることがある。
【0036】
ここで図5を参照すると、全体を参照番号66で表した1つまたは複数の品質計測値に基づいて複数のEMセンサ間での選択を行うための流れ図を表している。図示した実施形態では、第1のセンサアセンブリ12と第2のセンサアセンブリ14の間での選択のために送信器−受信器間距離及び磁場完全性を使用している。これらの2つのセンサアセンブリ間での選択のためには、センサアセンブリの両方が一連の品質計測値と比較される。ブロック70に示したように、第1のEMセンサアセンブリ12内の主センサに関する送信器−受信器間距離が先ず距離しきい値と比較される。第1のセンサアセンブリ12に関する送信器−受信器間距離が距離しきい値未満であれば、次いで第1のセンサアセンブリ12に関する磁場完全性値が事前設定のしきい値と比較される(ブロック72)。
【0037】
図示した実施形態では、第1のセンサアセンブリ12に関する送信器−受信器間距離が距離しきい値を超えているか第1のセンサアセンブリ12に関する磁場完全性値が事前設定のしきい値を超えていれば、第1のセンサアセンブリ14は選択されず本技法はブロック74に移行する。したがって次いで第2のセンサアセンブリ14を一連の品質計測値と比較する必要がある。ブロック74に示したように、第2のセンサアセンブリ14に関する送信器−受信器間距離が先ず距離しきい値と比較される。第2のセンサアセンブリ14に関する送信器−受信器間距離が距離しきい値未満であれば、次いで第2のセンサアセンブリ14に関する磁場完全性値が事前設定のしきい値と比較される(ブロック76)。第2のセンサアセンブリ14について、ブロック74で決定した送信器−受信器間距離とブロック76で決定した磁場完全性値のいずれかがそれぞれのしきい値を超える場合、第2のセンサアセンブリを選択しないことがある。これに代えて、ブロック78に示すように警告が通報されることがある。しかし、第2のセンサアセンブリ14に関するこれらの品質計測値の両方がそれぞれのしきい値未満であれば、ブロック80に示すように第2のセンサアセンブリが選択されることがある。
【0038】
さらに、ブロック70及び72での決定に従って第1のセンサアセンブリ12に関する品質計測値の両方がそのそれぞれのしきい値未満であれば、次いで第2のセンサアセンブリ14が一連の品質計測値と比較される。ブロック82に示したように、第2のセンサアセンブリ14内の主センサに関する送信器−受信器間距離が先ず距離しきい値と比較される。第2のセンサアセンブリ14に関する送信器−受信器間距離が距離しきい値未満であれば、第2のセンサアセンブリ14に関する磁場完全性値が事前設定のしきい値と比較される(ブロック84)。第2のセンサアセンブリ14について、送信器−受信器間距離(ブロック82における決定による)と磁場完全性値(ブロック84における決定による)のいずれかがそのそれぞれのしきい値を超える場合、第2のセンサアセンブリを選択しないことがある。これに代えて、ブロック70及び72における決定に従って当該センサアセンブリに関する品質計測値が品質計測値のしきい値域内に見出されていた第1のセンサアセンブリ12が選択される(ブロック86)ことになる。しかし、第2のセンサアセンブリに関するこれらの品質計測値の両方がそのそれぞれのしきい値未満であれば、これらの2つのセンサアセンブリ間での選択のために追加的計測値が用いられることがある。例えば、第1のセンサアセンブリ12に関する送信器−受信器間距離が第2のセンサアセンブリに関する送信器−受信器間距離と比較されることがある(ブロック88)。図示したように、送信器−受信器間距離が最短であるセンサアセンブリが選択されることがある。信号対雑音比をより良好にするために、送信器−受信器間距離が最短のセンサアセンブリが選択されることがあることが理解されよう。例えば、第1のセンサアセンブリ12に関するこの距離が第2のセンサアセンブリ14に関するこの距離より短ければ、ブロック86に示すように第1のセンサアセンブリが選択されることがある。第1のセンサアセンブリ12に関するこの距離が第2のセンサアセンブリ14に関するこの距離より短くなければ、ブロック80に示すように第2のセンサアセンブリが選択されることがある。
【0039】
上述の実施形態では複数個のうちからの具体的な1つのEMセンサの選択について記載しているが、複数のEMセンサ間での選択にはセンサの各々からの計測値に対して重み付けアルゴリズムを適用することも包含されるものと理解されることに留意すべきである。例えば、複数のEMセンサの各々に関して画像座標系で決定したデバイス位置に対して重み付けアルゴリズムが適用されることがある。具体的な一実現形態では、送信器−受信器間距離が重み付けアルゴリズムの重みとして使用されることがある。例えば、第1及び第2のセンサアセンブリ12及び14のそれぞれに対する重みw1及びw2は次式のように規定されることがある。
【0040】
w1=d22/(d12+d22)
w2=d12/(d12+d22)
上式においてd1及びd2は、患者に対して固定のセンサアセンブリ16からの撮像システムに対して固定のセンサアセンブリ12及び14のそれぞれまでの送信器−受信器間距離である。
【0041】
したがって画像座標系におけるデバイス位置
【0042】
【数1】
は、2つのセンサアセンブリにより収集したデバイス投射情報
【0043】
【数2】
と
【0044】
【数3】
を結合させることによって決定することができる。
【0045】
【数4】
各センサアセンブリからの計測値を重み付けして結合させることによってナビゲーションシステムの頑強性を大幅に改善させ得ることが理解されよう。
【0046】
本発明のある種の特徴についてのみ本明細書において図示し説明してきたが、当業者によって多くの修正や変更がなされるであろう。したがって、添付の特許請求の範囲は、本発明の真の精神の範囲に属するこうした修正や変更のすべてを包含させるように意図したものであることを理解されたい。また、図面の符号に対応する特許請求の範囲中の符号は、単に本願発明の理解をより容易にするために用いられているものであり、本願発明の範囲を狭める意図で用いられたものではない。そして、本願の特許請求の範囲に記載した事項は、明細書に組み込まれ、明細書の記載事項の一部となる。
【図面の簡単な説明】
【0047】
【図1】本技法の一実現形態による例示的な撮像/トラッキングシステムの図である。
【図2】本技法の一実現形態による例示的なセンサアセンブリの図である。
【図3】本技法の一実現形態による誤差検出のための例示的なセンサアセンブリと連係した仮想点の利用について表した図である。
【図4】本技法の一実現形態による最適なEMセンサを選択するための例示的な技法のブロック図である。
【図5】本技法の一実現形態による最適なEMセンサを選択するために2つ以上の品質計測値を用いた例示的な技法のブロック図である。
【符号の説明】
【0048】
10 撮像/トラッキングシステム
12 第1のEMセンサアセンブリ
14 第2のEMセンサアセンブリ
16 第3のEMセンサアセンブリ
18 第4のEMセンサアセンブリ
20 X線蛍光透視システム
22 制御器
24 ワークステーション
26 C字アーム
28 X線放射源
30 X線放射検出器
32 患者
34 テーブル
36 医用デバイス
38 較正アセンブリ
40 インタフェース回路
42 中央処理回路
44 メモリ回路
46 ワークステーションインタフェース回路
48 ユーザインタフェース
50 ディスプレイ
52 主EMセンサ
54 基準EMセンサ
56 第1の仮想点
58 第2の仮想点
60 信号の収集
62 センサ箇所の決定
64 センサ箇所の補正
66 センサ間での選択
68 デバイス箇所の投射
70 第1のセンサアセンブリに関する送信器−受信器間距離のしきい値との比較
72 第1のセンサアセンブリに関する磁場完全性値のしきい値との比較
74 第2のセンサアセンブリに関する送信器−受信器間距離のしきい値との比較
76 第2のセンサアセンブリに関する磁場完全性値のしきい値との比較
78 警告の通報
80 第2のセンサアセンブリの選択
82 第2のセンサアセンブリに関する送信器−受信器間距離のしきい値との比較
84 第2のセンサアセンブリに関する磁場完全性値のしきい値との比較
86 第1のセンサアセンブリの選択
88 第1と第2のセンサアセンブリに関する送信器−受信器間距離の比較
【特許請求の範囲】
【請求項1】
1つまたは複数の電磁場歪みを補正するように複数の電磁気センサ(12、14)間で選択を行うための方法であって、
電磁場が存在するときに複数の電磁気センサ(12、14)の各々の箇所を表す信号を収集する工程と、
1つまたは複数の品質計測値に基づいて複数の電磁気センサ(12、14)からの信号間で選択を行う工程と、
を含む方法。
【請求項2】
前記1つまたは複数の品質計測値は、送信器−受信器間距離、電磁場強度、電磁場完全性のうちの1つまたは幾つかから選択される、請求項1に記載の方法。
【請求項3】
複数の電磁気センサ(12、14)からの信号間での前記選択は重み付けアルゴリズムを利用することを含む、請求項1に記載の方法。
【請求項4】
複数の電磁気センサ(12、14)からの信号間での前記選択は該電磁気センサ(12、14)の各々に関する送信器−受信器間距離を該複数の電磁気センサ(12、14)の残りのセンサに関する送信器−受信器間距離と比較することを含む、請求項1に記載の方法。
【請求項5】
複数の電磁気センサ(12、14)からの信号間での前記選択は該複数の電磁気センサ12、14の各々に関する送信器−受信器間距離を距離しきい値と比較することを含む、請求項1に記載の方法。
【請求項6】
前記複数の電磁気センサ(12、14)間での選択にその一部で基づいてデバイス(36)位置及び方向を決定する工程を含む請求項1に記載の方法。
【請求項7】
1つまたは複数の電磁場歪みを補正するのに最適な電磁気センサを選択するためのシステム(10)であって、
複数の電磁気センサ(12、14)と、
電磁場を発生させるためあるいは前記複数の電磁気センサ(12、14)の各々の箇所を表す信号を受信するための追加的電磁気センサ(16)と、
前記複数の電磁気センサ(12、14)の箇所を表す信号を収集すると共に、1つまたは複数の品質計測値に基づいて該複数の電磁気センサ(12、14)からの信号間で選択を行うように構成された制御器(22)と、
を備えるシステム(10)。
【請求項8】
前記複数の電磁気センサ(12、14)は撮像システム(20)に対して固定されている、請求項7に記載のシステム(10)。
【請求項9】
前記1つまたは複数の品質計測値は、送信器−受信器間距離、電磁場強度、電磁場完全性のうちの1つまたは幾つかから選択される、請求項7に記載のシステム(10)。
【請求項10】
前記制御器(22)はさらに前記複数の電磁気センサ(12、14)間での選択にその一部で基づいてデバイス(36)位置及び方向を決定するように構成されている、請求項7に記載のシステム(10)。
【請求項1】
1つまたは複数の電磁場歪みを補正するように複数の電磁気センサ(12、14)間で選択を行うための方法であって、
電磁場が存在するときに複数の電磁気センサ(12、14)の各々の箇所を表す信号を収集する工程と、
1つまたは複数の品質計測値に基づいて複数の電磁気センサ(12、14)からの信号間で選択を行う工程と、
を含む方法。
【請求項2】
前記1つまたは複数の品質計測値は、送信器−受信器間距離、電磁場強度、電磁場完全性のうちの1つまたは幾つかから選択される、請求項1に記載の方法。
【請求項3】
複数の電磁気センサ(12、14)からの信号間での前記選択は重み付けアルゴリズムを利用することを含む、請求項1に記載の方法。
【請求項4】
複数の電磁気センサ(12、14)からの信号間での前記選択は該電磁気センサ(12、14)の各々に関する送信器−受信器間距離を該複数の電磁気センサ(12、14)の残りのセンサに関する送信器−受信器間距離と比較することを含む、請求項1に記載の方法。
【請求項5】
複数の電磁気センサ(12、14)からの信号間での前記選択は該複数の電磁気センサ12、14の各々に関する送信器−受信器間距離を距離しきい値と比較することを含む、請求項1に記載の方法。
【請求項6】
前記複数の電磁気センサ(12、14)間での選択にその一部で基づいてデバイス(36)位置及び方向を決定する工程を含む請求項1に記載の方法。
【請求項7】
1つまたは複数の電磁場歪みを補正するのに最適な電磁気センサを選択するためのシステム(10)であって、
複数の電磁気センサ(12、14)と、
電磁場を発生させるためあるいは前記複数の電磁気センサ(12、14)の各々の箇所を表す信号を受信するための追加的電磁気センサ(16)と、
前記複数の電磁気センサ(12、14)の箇所を表す信号を収集すると共に、1つまたは複数の品質計測値に基づいて該複数の電磁気センサ(12、14)からの信号間で選択を行うように構成された制御器(22)と、
を備えるシステム(10)。
【請求項8】
前記複数の電磁気センサ(12、14)は撮像システム(20)に対して固定されている、請求項7に記載のシステム(10)。
【請求項9】
前記1つまたは複数の品質計測値は、送信器−受信器間距離、電磁場強度、電磁場完全性のうちの1つまたは幾つかから選択される、請求項7に記載のシステム(10)。
【請求項10】
前記制御器(22)はさらに前記複数の電磁気センサ(12、14)間での選択にその一部で基づいてデバイス(36)位置及び方向を決定するように構成されている、請求項7に記載のシステム(10)。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2008−80122(P2008−80122A)
【公開日】平成20年4月10日(2008.4.10)
【国際特許分類】
【出願番号】特願2007−245125(P2007−245125)
【出願日】平成19年9月21日(2007.9.21)
【出願人】(390041542)ゼネラル・エレクトリック・カンパニイ (6,332)
【氏名又は名称原語表記】GENERAL ELECTRIC COMPANY
【Fターム(参考)】
【公開日】平成20年4月10日(2008.4.10)
【国際特許分類】
【出願日】平成19年9月21日(2007.9.21)
【出願人】(390041542)ゼネラル・エレクトリック・カンパニイ (6,332)
【氏名又は名称原語表記】GENERAL ELECTRIC COMPANY
【Fターム(参考)】
[ Back to top ]