
複数船の自動操船制御方法および自動操船制御システム
【課題】自船の自動操船を行いながら他船の自動操船を一括して制御したり、各船の自動操船を個々に制御することのできる複数船の自動操船制御システムを提供する。
【解決手段】管制船1と共に自動操船により航行する複数の被管制船2、3からの位置・船速の情報が受信されたときに、それぞれの被管制船2、3の位置・船速の情報に対して、予め入力部30により設定された目標航路・目標船速と自船(管制船1)の位置・船速の情報を基にそれぞれ位置・船速を指令する管制情報を生成し、複数の他船にそれぞれ送信する管制/制御装置10を備えた。
【解決手段】管制船1と共に自動操船により航行する複数の被管制船2、3からの位置・船速の情報が受信されたときに、それぞれの被管制船2、3の位置・船速の情報に対して、予め入力部30により設定された目標航路・目標船速と自船(管制船1)の位置・船速の情報を基にそれぞれ位置・船速を指令する管制情報を生成し、複数の他船にそれぞれ送信する管制/制御装置10を備えた。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、船の自動操船に係わり、自動操船により航行する複数の他船を管制制御する複数船の自動操船制御方法および自動操船制御システムに関するものである。
【背景技術】
【0002】
従来の自動操船制御システムとして、例えば海上消火活動を行う際、火災船と消防艇との距離を所定距離に保ちつつ常に風上から消火を行えるように、海上の対象物である火災船との距離および角度が適切な距離および角度となるように自船(消防艇)を自動操縦するシステムがある(例えば、特許文献1参照)。
【0003】
【特許文献1】特開2002−362490号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
前述した従来の自動操船制御システムは、自船の操船のみを自動化するものであり、自船の操船に合わせて他船の操船を制御したり、他船の操船に合わせて自船の操船を調整したり、また、自船と複数の他船を一括して管制するような機能を持つものではなかった。
【0005】
本発明は、前記のような課題を解決するためになされたもので、自船の自動操船を行いながら他船の自動操船を一括して制御したり、各船の自動操船を個々に制御することのできる複数船の自動操船制御方法および自動操船制御システムを得ることを目的とする。
【課題を解決するための手段】
【0006】
本発明に係る複数船の自動操船制御方法は、本船と共に自動操船により航行する複数の他船からの航路情報・運動情報が受信されたときに、各他船の航路情報・運動情報に対して、予め設定された目標航路・目標船速と本船の航路情報・運動情報を基にそれぞれ航路・運動を指令する管制情報を生成し、複数の他船にそれぞれ送信する。
【0007】
また、本発明に係る複数船の自動操船制御システムは、本船と共に自動操船により航行する複数の他船からの航路情報・運動情報が受信されたときに、各他船の航路情報・運動情報に対して、予め設定された目標航路・目標船速と本船の航路情報・運動情報を基にそれぞれ位置・運動を指令する管制情報を生成し、複数の他船にそれぞれ送信する管制/制御装置を備えたものである。
【発明の効果】
【0008】
本発明によれば、複数の他船からの航路情報・運動情報が受信されたときに、各他船の航路情報・運動情報に対して、予め設定された目標航路・目標船速と本船の航路情報・運動情報を基にそれぞれ航路・運動を指令する管制情報を生成し、複数の他船にそれぞれ送信するようにしたので、本船と他船との間で連携や協調を考慮した制御が可能になり、このため、曳航作業や捜索作業などを効率よく行うことができると共に、作業中の安全面も向上する。また、広範囲な海底の地質調査においても複数の船で効率よく行うことが可能になり、調査時間を大幅に短縮できる。
【発明を実施するための最良の形態】
【0009】
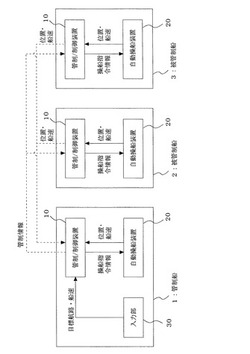
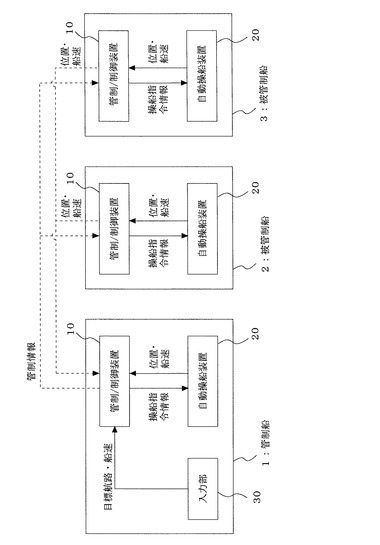
図1は本発明の実施の形態に係る複数船の自動操船制御方法が適用される複数船の自動操船制御システムの構成を示すブロック図、図2は実施の形態における管制/制御装置の構成を示すブロック図である。
本実施の形態においては、例えば図1に示すように、3隻の船のうち左側の船を管制船1として、残りの2隻を被管制船2、3として説明する。なお、本実施の形態では船の数を3隻としているが、2隻でも良いし、4隻以上でも良い。各船1、2、3には、同じ機能を有する管制/制御装置10および自動操船装置20がそれぞれ搭載されている。入力部30は、被管制船2、3側には図示していないが、自動操船により同じ目標に向かって航行させるための全船の目標航路・目標船速を管制/制御装置10に入力する装置である。
【0010】
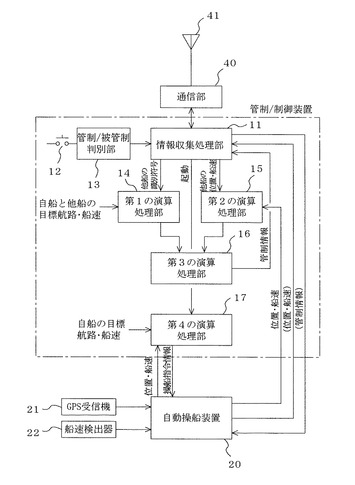
各船1、2、3に搭載された管制/制御装置10は、図2に示すように、情報収集処理部11と、管制/被管制の何れかを選択するためのスイッチ12と、このスイッチ操作に基づいて自船が管制側か被管制側かを判別する管制/被管制判別部13と、第1の演算処理部14と、第2の演算処理部15と、第3の演算処理部16と、第4の演算処理部17とを備えている。その第1の演算処理部14〜第4の演算処理部17は、自船が管制側の場合に動作する。
【0011】
前述した情報収集処理部11は、管制/被管制判別部13によって管制側と判断されたとき自船を管制船1として後述する処理を行い、被管制側と判断されたときは自船を被管制船2、3として管制船1の管制下に入るように処理する。
管制船1側においては、第4の演算処理部17を起動して自動操船装置20を制御させ、所定時間t1(定期的)毎に被管制船2、3(他船)の位置・船速などの情報を取得するための要求信号を通信部40およびアンテナ41を通して送信する。その要求信号に応答して被管制船2、3から位置・船速などの情報が送られてきたときは、例えば、その情報から被管制船2、3の識別符号を順次に抽出して第1の演算処理部14に送出し、被管制船2、3の位置・船速を順次に抽出して第2の演算処理部15に送出する。また、第3の演算処理部16により演算処理された被管制船2、3の管制情報が入力されたときは、通信部40およびアンテナ41を通して被管制船2、3に送信する。
【0012】
一方、被管制船2、3側においては、要求信号が受信されたときに自動操船装置20から自船の位置・船速(図2の括弧内に示す)を読み込んで通信部40およびアンテナ41を通して送信し、管制情報が受信されたときはその管制情報(図2の括弧内に示す)を自動操船装置20に送出して、管制情報に基づく自動操船が行われるようにする。
【0013】
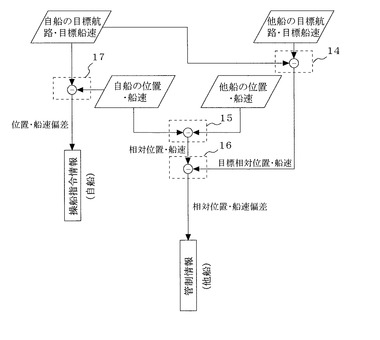
前記の第1の演算処理部14は、被管制船2、3の識別符号が入力される毎に、予め入力部30により入力された自船(管制船1)の目標航路・目標船速と被管制船2、3の目標航路・目標船速とからそれぞれ目標相対位置・目標相対船速を算出し第3の演算処理部16に送出する。第2の演算処理部15は、被管制船2、3の位置・船速が入力される毎に自船の位置・船速とからそれぞれ相対位置・相対船速を算出し第3の演算処理部16に送出する。第3の演算処理部16は、第1の演算処理部14により算出された目標相対位置・目標相対船速と第2の演算処理部15により算出された相対位置・相対船速とから自船と他船との相対位置偏差・相対船速偏差を算出し、他船に対する管制情報を生成して情報収集処理部11に送出する。この処理は、被管制船2,3毎に行われる。
【0014】
第4の演算処理部17は、情報収集処理部11により起動されたときに、所定時間t2(t1>t2)毎に自動操船装置20から自船の位置・船速を読み込んで、自船の目標航路・目標船速との偏差を算出し、その結果を自船(管制船1)に対する操船指令情報として自動操船装置20に送出する。
【0015】
自動操船装置20は、所定時間t1毎に情報収集処理部11から要求される自船の位置・船速の情報の読み出しを受けたとき、GPS受信機21から自船の位置および船速検出器22から自船の船速をそれぞれ読み込んで情報収集処理部11に送出し、情報収集処理部11からの管制情報が入力されたときは、その管制情報に基づいて自船を操船する。また、所定時間t2毎に第4の演算処理部17から要求される自船の位置・船速の情報の読み出しを受けたときは、前記と同様に自船の位置・船速の情報を第4の演算処理部17に送出し、第4の演算処理部17からの操船指令情報が入力されたときは、操船指令情報に従って自船を操船する。なお、自動操船装置20から取得する情報として船の位置・船速としたが、船の方位も含ませるようにしても良い。
【0016】
次に、前記のように構成された複数船の自動操船制御システムにおいて、管制船1側と被管制船2、3側の動作について説明する。なお、管制船1側の動作については図3を参照しながら説明する。図3は管制船側の管制/制御装置の動作を示すフローチャートである。
管制船1側の管制/制御装置10においては、情報収集処理部11が、第4の演算処理部17を起動し、所定時間t1毎に被管制船2、3に要求信号を通信部40およびアンテナ41を通して発振する。第4の演算処理部17は、所定時間t2毎に自動操船装置20から位置・船速を読み込んで、予め入力された目標航路・目標船速と比較して自船の位置偏差・船速偏差を求め、操船指令情報として自動操船装置20に送出し自船の自動操船を制御する。
【0017】
また、管制船1側の情報収集処理部11は、要求信号の送信に応答して被管制船2、3側から位置・船速の情報が送られてくると、その情報から被管制船2、3の識別符号を順次に抽出して第1の演算処理部14に送出し、被管制船2、3の位置・船速を順次に抽出して第2の演算処理部15に送出する。第1の演算処理部14は、まず、自船(管制船1)の目標航路・目標船速を本装置10から読み出すと共に、抽出された最初の識別符号に基づいて被管制船2の目標航路・目標船速を本装置10から読み出し、これらから自船と被管制船2との目標相対位置・目標相対船速を算出し、第3の演算処理部16に送出する。次いで、2番目の識別符号に基づいて被管制船2の目標航路・目標船速を本装置10から読み出し、自船(管制船1)の目標航路・目標船速とから被管制船2との目標相対位置・目標相対船速を算出し、第3の演算処理部16に送出する。
【0018】
第2の演算処理部15は、被管制船2、3の位置・船速が入力される毎に自船の位置・船速とからそれぞれ相対位置・相対船速を算出して、第3の演算処理部16に送出し、第3の演算処理部16は、第1の演算処理部14により算出された目標相対位置・目標相対船速と第2の演算処理部15により算出された相対位置・相対船速とから自船と被管制船2、3との相対位置偏差・相対船速偏差をそれぞれ算出し、被管制船2、3に対する管制情報をそれぞれ生成して情報収集処理部11に送出する。情報収集処理部11は、被管制船2、3のそれぞれの管制情報が入力されたとき、先の識別符号を付して通信部40に送出し、アンテナ41から送信させる。
【0019】
一方、被管制船2、3側の管制/制御装置10においては、情報収集処理部11が、管制船1からの要求信号が受信されたかどうかを監視し、要求信号の受信を検知したときは、自動操船装置20から自船の位置・船速の情報を読み込み、通信部40およびアンテナ41を通して管制船1側に送信する。この情報の送信により管制情報が受信されたときは、自動操船装置20に管制情報を送出して自船の操船を制御させる。その管制情報により、例えば、被管制船3がもう一隻の被管制船2より遅れている場合、被管制船3の船速を上げたり、また逆に、被管制船2の船速を下げたり、さらには、何れか一方の被管制船が航路から外れている場合は、必要に応じて他方の被管制船の航路をずらして各船間の相対位置を保つようになる。
【0020】
以上のように実施の形態よれば、被管制船2、3から位置・船速が送られてきたとき、被管制船2、3のそれぞれの位置・船速に対して、予め設定された目標航路・目標船速と自船(管制船1)の位置・船速を基に位置・船速を指令するそれぞれの管制情報を生成し、被管制船2、3にそれぞれ送信して、自動操船装置20の自動操船を制御させるようにしたので、管制船1と被管制船2、3との間で連携や協調を考慮した制御が可能になり、このため、曳航作業や捜索作業などを効率よく行うことができると共に、作業中の安全面も向上する。また、広範囲な海底の地質調査においても複数の船で効率よく行うことが可能になり、調査時間を大幅に短縮できる。また、管制/制御装置10における管制側/被管制側の切替を任意に選択できるように構成されているので、本装置10を搭載したどの船でも管制船になれるという運用面における自由度や、製造時のコストダウンといったメリットが得られている。
【図面の簡単な説明】
【0021】
【図1】本発明の実施の形態に係る複数船の自動操船制御方法が適用される複数船の自動操船制御システムの構成を示すブロック図である。
【図2】実施の形態における管制/制御装置の構成を示すブロック図である。
【図3】管制船側の管制/制御装置の動作を示すフローチャートである。
【符号の説明】
【0022】
1 管制船、2、3 被管制船、11 情報収集処理部、12 スイッチ、13 管制/被管制判別部、14 第1の演算処理部、15 第2の演算処理部、16 第3の演算処理部、17 第4の演算処理部、20 自動操船装置、21 GPS受信機、22 船速検出器、40 通信部、41 アンテナ。
【技術分野】
【0001】
本発明は、船の自動操船に係わり、自動操船により航行する複数の他船を管制制御する複数船の自動操船制御方法および自動操船制御システムに関するものである。
【背景技術】
【0002】
従来の自動操船制御システムとして、例えば海上消火活動を行う際、火災船と消防艇との距離を所定距離に保ちつつ常に風上から消火を行えるように、海上の対象物である火災船との距離および角度が適切な距離および角度となるように自船(消防艇)を自動操縦するシステムがある(例えば、特許文献1参照)。
【0003】
【特許文献1】特開2002−362490号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
前述した従来の自動操船制御システムは、自船の操船のみを自動化するものであり、自船の操船に合わせて他船の操船を制御したり、他船の操船に合わせて自船の操船を調整したり、また、自船と複数の他船を一括して管制するような機能を持つものではなかった。
【0005】
本発明は、前記のような課題を解決するためになされたもので、自船の自動操船を行いながら他船の自動操船を一括して制御したり、各船の自動操船を個々に制御することのできる複数船の自動操船制御方法および自動操船制御システムを得ることを目的とする。
【課題を解決するための手段】
【0006】
本発明に係る複数船の自動操船制御方法は、本船と共に自動操船により航行する複数の他船からの航路情報・運動情報が受信されたときに、各他船の航路情報・運動情報に対して、予め設定された目標航路・目標船速と本船の航路情報・運動情報を基にそれぞれ航路・運動を指令する管制情報を生成し、複数の他船にそれぞれ送信する。
【0007】
また、本発明に係る複数船の自動操船制御システムは、本船と共に自動操船により航行する複数の他船からの航路情報・運動情報が受信されたときに、各他船の航路情報・運動情報に対して、予め設定された目標航路・目標船速と本船の航路情報・運動情報を基にそれぞれ位置・運動を指令する管制情報を生成し、複数の他船にそれぞれ送信する管制/制御装置を備えたものである。
【発明の効果】
【0008】
本発明によれば、複数の他船からの航路情報・運動情報が受信されたときに、各他船の航路情報・運動情報に対して、予め設定された目標航路・目標船速と本船の航路情報・運動情報を基にそれぞれ航路・運動を指令する管制情報を生成し、複数の他船にそれぞれ送信するようにしたので、本船と他船との間で連携や協調を考慮した制御が可能になり、このため、曳航作業や捜索作業などを効率よく行うことができると共に、作業中の安全面も向上する。また、広範囲な海底の地質調査においても複数の船で効率よく行うことが可能になり、調査時間を大幅に短縮できる。
【発明を実施するための最良の形態】
【0009】
図1は本発明の実施の形態に係る複数船の自動操船制御方法が適用される複数船の自動操船制御システムの構成を示すブロック図、図2は実施の形態における管制/制御装置の構成を示すブロック図である。
本実施の形態においては、例えば図1に示すように、3隻の船のうち左側の船を管制船1として、残りの2隻を被管制船2、3として説明する。なお、本実施の形態では船の数を3隻としているが、2隻でも良いし、4隻以上でも良い。各船1、2、3には、同じ機能を有する管制/制御装置10および自動操船装置20がそれぞれ搭載されている。入力部30は、被管制船2、3側には図示していないが、自動操船により同じ目標に向かって航行させるための全船の目標航路・目標船速を管制/制御装置10に入力する装置である。
【0010】
各船1、2、3に搭載された管制/制御装置10は、図2に示すように、情報収集処理部11と、管制/被管制の何れかを選択するためのスイッチ12と、このスイッチ操作に基づいて自船が管制側か被管制側かを判別する管制/被管制判別部13と、第1の演算処理部14と、第2の演算処理部15と、第3の演算処理部16と、第4の演算処理部17とを備えている。その第1の演算処理部14〜第4の演算処理部17は、自船が管制側の場合に動作する。
【0011】
前述した情報収集処理部11は、管制/被管制判別部13によって管制側と判断されたとき自船を管制船1として後述する処理を行い、被管制側と判断されたときは自船を被管制船2、3として管制船1の管制下に入るように処理する。
管制船1側においては、第4の演算処理部17を起動して自動操船装置20を制御させ、所定時間t1(定期的)毎に被管制船2、3(他船)の位置・船速などの情報を取得するための要求信号を通信部40およびアンテナ41を通して送信する。その要求信号に応答して被管制船2、3から位置・船速などの情報が送られてきたときは、例えば、その情報から被管制船2、3の識別符号を順次に抽出して第1の演算処理部14に送出し、被管制船2、3の位置・船速を順次に抽出して第2の演算処理部15に送出する。また、第3の演算処理部16により演算処理された被管制船2、3の管制情報が入力されたときは、通信部40およびアンテナ41を通して被管制船2、3に送信する。
【0012】
一方、被管制船2、3側においては、要求信号が受信されたときに自動操船装置20から自船の位置・船速(図2の括弧内に示す)を読み込んで通信部40およびアンテナ41を通して送信し、管制情報が受信されたときはその管制情報(図2の括弧内に示す)を自動操船装置20に送出して、管制情報に基づく自動操船が行われるようにする。
【0013】
前記の第1の演算処理部14は、被管制船2、3の識別符号が入力される毎に、予め入力部30により入力された自船(管制船1)の目標航路・目標船速と被管制船2、3の目標航路・目標船速とからそれぞれ目標相対位置・目標相対船速を算出し第3の演算処理部16に送出する。第2の演算処理部15は、被管制船2、3の位置・船速が入力される毎に自船の位置・船速とからそれぞれ相対位置・相対船速を算出し第3の演算処理部16に送出する。第3の演算処理部16は、第1の演算処理部14により算出された目標相対位置・目標相対船速と第2の演算処理部15により算出された相対位置・相対船速とから自船と他船との相対位置偏差・相対船速偏差を算出し、他船に対する管制情報を生成して情報収集処理部11に送出する。この処理は、被管制船2,3毎に行われる。
【0014】
第4の演算処理部17は、情報収集処理部11により起動されたときに、所定時間t2(t1>t2)毎に自動操船装置20から自船の位置・船速を読み込んで、自船の目標航路・目標船速との偏差を算出し、その結果を自船(管制船1)に対する操船指令情報として自動操船装置20に送出する。
【0015】
自動操船装置20は、所定時間t1毎に情報収集処理部11から要求される自船の位置・船速の情報の読み出しを受けたとき、GPS受信機21から自船の位置および船速検出器22から自船の船速をそれぞれ読み込んで情報収集処理部11に送出し、情報収集処理部11からの管制情報が入力されたときは、その管制情報に基づいて自船を操船する。また、所定時間t2毎に第4の演算処理部17から要求される自船の位置・船速の情報の読み出しを受けたときは、前記と同様に自船の位置・船速の情報を第4の演算処理部17に送出し、第4の演算処理部17からの操船指令情報が入力されたときは、操船指令情報に従って自船を操船する。なお、自動操船装置20から取得する情報として船の位置・船速としたが、船の方位も含ませるようにしても良い。
【0016】
次に、前記のように構成された複数船の自動操船制御システムにおいて、管制船1側と被管制船2、3側の動作について説明する。なお、管制船1側の動作については図3を参照しながら説明する。図3は管制船側の管制/制御装置の動作を示すフローチャートである。
管制船1側の管制/制御装置10においては、情報収集処理部11が、第4の演算処理部17を起動し、所定時間t1毎に被管制船2、3に要求信号を通信部40およびアンテナ41を通して発振する。第4の演算処理部17は、所定時間t2毎に自動操船装置20から位置・船速を読み込んで、予め入力された目標航路・目標船速と比較して自船の位置偏差・船速偏差を求め、操船指令情報として自動操船装置20に送出し自船の自動操船を制御する。
【0017】
また、管制船1側の情報収集処理部11は、要求信号の送信に応答して被管制船2、3側から位置・船速の情報が送られてくると、その情報から被管制船2、3の識別符号を順次に抽出して第1の演算処理部14に送出し、被管制船2、3の位置・船速を順次に抽出して第2の演算処理部15に送出する。第1の演算処理部14は、まず、自船(管制船1)の目標航路・目標船速を本装置10から読み出すと共に、抽出された最初の識別符号に基づいて被管制船2の目標航路・目標船速を本装置10から読み出し、これらから自船と被管制船2との目標相対位置・目標相対船速を算出し、第3の演算処理部16に送出する。次いで、2番目の識別符号に基づいて被管制船2の目標航路・目標船速を本装置10から読み出し、自船(管制船1)の目標航路・目標船速とから被管制船2との目標相対位置・目標相対船速を算出し、第3の演算処理部16に送出する。
【0018】
第2の演算処理部15は、被管制船2、3の位置・船速が入力される毎に自船の位置・船速とからそれぞれ相対位置・相対船速を算出して、第3の演算処理部16に送出し、第3の演算処理部16は、第1の演算処理部14により算出された目標相対位置・目標相対船速と第2の演算処理部15により算出された相対位置・相対船速とから自船と被管制船2、3との相対位置偏差・相対船速偏差をそれぞれ算出し、被管制船2、3に対する管制情報をそれぞれ生成して情報収集処理部11に送出する。情報収集処理部11は、被管制船2、3のそれぞれの管制情報が入力されたとき、先の識別符号を付して通信部40に送出し、アンテナ41から送信させる。
【0019】
一方、被管制船2、3側の管制/制御装置10においては、情報収集処理部11が、管制船1からの要求信号が受信されたかどうかを監視し、要求信号の受信を検知したときは、自動操船装置20から自船の位置・船速の情報を読み込み、通信部40およびアンテナ41を通して管制船1側に送信する。この情報の送信により管制情報が受信されたときは、自動操船装置20に管制情報を送出して自船の操船を制御させる。その管制情報により、例えば、被管制船3がもう一隻の被管制船2より遅れている場合、被管制船3の船速を上げたり、また逆に、被管制船2の船速を下げたり、さらには、何れか一方の被管制船が航路から外れている場合は、必要に応じて他方の被管制船の航路をずらして各船間の相対位置を保つようになる。
【0020】
以上のように実施の形態よれば、被管制船2、3から位置・船速が送られてきたとき、被管制船2、3のそれぞれの位置・船速に対して、予め設定された目標航路・目標船速と自船(管制船1)の位置・船速を基に位置・船速を指令するそれぞれの管制情報を生成し、被管制船2、3にそれぞれ送信して、自動操船装置20の自動操船を制御させるようにしたので、管制船1と被管制船2、3との間で連携や協調を考慮した制御が可能になり、このため、曳航作業や捜索作業などを効率よく行うことができると共に、作業中の安全面も向上する。また、広範囲な海底の地質調査においても複数の船で効率よく行うことが可能になり、調査時間を大幅に短縮できる。また、管制/制御装置10における管制側/被管制側の切替を任意に選択できるように構成されているので、本装置10を搭載したどの船でも管制船になれるという運用面における自由度や、製造時のコストダウンといったメリットが得られている。
【図面の簡単な説明】
【0021】
【図1】本発明の実施の形態に係る複数船の自動操船制御方法が適用される複数船の自動操船制御システムの構成を示すブロック図である。
【図2】実施の形態における管制/制御装置の構成を示すブロック図である。
【図3】管制船側の管制/制御装置の動作を示すフローチャートである。
【符号の説明】
【0022】
1 管制船、2、3 被管制船、11 情報収集処理部、12 スイッチ、13 管制/被管制判別部、14 第1の演算処理部、15 第2の演算処理部、16 第3の演算処理部、17 第4の演算処理部、20 自動操船装置、21 GPS受信機、22 船速検出器、40 通信部、41 アンテナ。
【特許請求の範囲】
【請求項1】
本船と共に自動操船により航行する複数の他船からの航路情報・運動情報が受信されたときに、各他船の航路情報・運動情報に対して、予め設定された目標航路・目標船速と本船の航路情報・運動情報を基にそれぞれ航路・運動を指令する管制情報を生成し、複数の他船にそれぞれ送信することを特徴とする複数船の自動操船制御方法。
【請求項2】
予め設定された自船の目標航路・目標船速と他船の目標航路・目標船速とから目標相対位置・目標相対船速を算出する第1の工程と、
自船の航路・船速と他船から取得した航路・船速とから相対位置・相対船速を算出する第2の工程と、
前記第1の工程により算出された目標相対位置・目標相対船速と前記第2の工程により算出された相対位置・相対船速とから自船と他船との相対位置偏差・相対船速偏差を算出し、これを基に他船に対する管制情報を生成するる第3の工程と
を有していることを特徴とする請求項1記載の複数船の自動操船制御方法。
【請求項3】
自船の目標航路・目標船速と自船の航路・船速とから位置偏差・船速偏差を算出し、これを操船指令情報として自船の自動操船装置に送出する第4の工程を備えていることを特徴とする請求項2記載の複数船の自動操船制御方法。
【請求項4】
本船と共に自動操船により航行する複数の他船からの航路情報・運動情報が受信されたときに、各他船の航路情報・運動情報に対して、予め設定された目標航路・目標船速と本船の航路情報・運動情報を基にそれぞれ航路・運動を指令する管制情報を生成し、複数の他船にそれぞれ送信する管制/制御装置を備えたことを特徴とする複数船の自動操船制御システム。
【請求項5】
前記管制/制御装置は、前記複数の他船にも搭載され、管制又は被管制の何れかを判別する管制/被管制判別部を備え、この管制/被管制判別部により管制と判断されたときは管制船として、定期的に前記航路情報・運動情報を取得するための要求信号を送信することを特徴とする請求項4記載の複数船の自動操船制御システム。
【請求項6】
前記管制/制御装置は、前記管制/被管制判別部により被管制と判断されたときは被管制船として、前記要求信号に応答して自船の航路情報・運動情報を送信し、前記管制情報が受信されたときは当該管制情報に基づく自動操船が行われるようにすることを特徴とする請求項5記載の複数船の自動操船制御システム。
【請求項7】
前記管制/制御装置は、
予め設定された自船の目標航路・目標船速と他船の目標航路・目標船速とから目標相対位置・目標相対船速を算出する第1の演算処理部と、
自船の航路・船速と他船から取得した航路・船速とから相対位置・相対船速を算出する第2の演算処理部と、
前記第1の演算処理部により算出された目標相対位置・目標相対船速と前記第2の演算処理部により算出された相対位置・相対船速とから自船と他船との相対位置偏差・相対船速偏差を算出し、これを基に他船に対する管制情報を生成するる第3の演算処理部と
を備えていることを特徴とする請求項4乃至6の何れかに記載の複数船の自動操船制御システム。
【請求項8】
前記管制/制御装置は、自船の目標航路・目標船速と自船の航路・船速とから位置偏差・船速偏差を算出し、これを操船指令情報として自船の自動操船装置に送出する第4の演算処理部を備えたことを特徴とする請求項7記載の複数船の自動操船制御システム。
【請求項1】
本船と共に自動操船により航行する複数の他船からの航路情報・運動情報が受信されたときに、各他船の航路情報・運動情報に対して、予め設定された目標航路・目標船速と本船の航路情報・運動情報を基にそれぞれ航路・運動を指令する管制情報を生成し、複数の他船にそれぞれ送信することを特徴とする複数船の自動操船制御方法。
【請求項2】
予め設定された自船の目標航路・目標船速と他船の目標航路・目標船速とから目標相対位置・目標相対船速を算出する第1の工程と、
自船の航路・船速と他船から取得した航路・船速とから相対位置・相対船速を算出する第2の工程と、
前記第1の工程により算出された目標相対位置・目標相対船速と前記第2の工程により算出された相対位置・相対船速とから自船と他船との相対位置偏差・相対船速偏差を算出し、これを基に他船に対する管制情報を生成するる第3の工程と
を有していることを特徴とする請求項1記載の複数船の自動操船制御方法。
【請求項3】
自船の目標航路・目標船速と自船の航路・船速とから位置偏差・船速偏差を算出し、これを操船指令情報として自船の自動操船装置に送出する第4の工程を備えていることを特徴とする請求項2記載の複数船の自動操船制御方法。
【請求項4】
本船と共に自動操船により航行する複数の他船からの航路情報・運動情報が受信されたときに、各他船の航路情報・運動情報に対して、予め設定された目標航路・目標船速と本船の航路情報・運動情報を基にそれぞれ航路・運動を指令する管制情報を生成し、複数の他船にそれぞれ送信する管制/制御装置を備えたことを特徴とする複数船の自動操船制御システム。
【請求項5】
前記管制/制御装置は、前記複数の他船にも搭載され、管制又は被管制の何れかを判別する管制/被管制判別部を備え、この管制/被管制判別部により管制と判断されたときは管制船として、定期的に前記航路情報・運動情報を取得するための要求信号を送信することを特徴とする請求項4記載の複数船の自動操船制御システム。
【請求項6】
前記管制/制御装置は、前記管制/被管制判別部により被管制と判断されたときは被管制船として、前記要求信号に応答して自船の航路情報・運動情報を送信し、前記管制情報が受信されたときは当該管制情報に基づく自動操船が行われるようにすることを特徴とする請求項5記載の複数船の自動操船制御システム。
【請求項7】
前記管制/制御装置は、
予め設定された自船の目標航路・目標船速と他船の目標航路・目標船速とから目標相対位置・目標相対船速を算出する第1の演算処理部と、
自船の航路・船速と他船から取得した航路・船速とから相対位置・相対船速を算出する第2の演算処理部と、
前記第1の演算処理部により算出された目標相対位置・目標相対船速と前記第2の演算処理部により算出された相対位置・相対船速とから自船と他船との相対位置偏差・相対船速偏差を算出し、これを基に他船に対する管制情報を生成するる第3の演算処理部と
を備えていることを特徴とする請求項4乃至6の何れかに記載の複数船の自動操船制御システム。
【請求項8】
前記管制/制御装置は、自船の目標航路・目標船速と自船の航路・船速とから位置偏差・船速偏差を算出し、これを操船指令情報として自船の自動操船装置に送出する第4の演算処理部を備えたことを特徴とする請求項7記載の複数船の自動操船制御システム。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2009−161131(P2009−161131A)
【公開日】平成21年7月23日(2009.7.23)
【国際特許分類】
【出願番号】特願2008−2758(P2008−2758)
【出願日】平成20年1月10日(2008.1.10)
【出願人】(502116922)ユニバーサル造船株式会社 (172)
【公開日】平成21年7月23日(2009.7.23)
【国際特許分類】
【出願日】平成20年1月10日(2008.1.10)
【出願人】(502116922)ユニバーサル造船株式会社 (172)
[ Back to top ]