
規範応答演算装置およびそれを用いた車両用操舵装置
【課題】 規範応答のゲインおよび位相の特性を独立に設定できる規範応答演算装置およびそれを用いた車両用操舵装置を提供する。
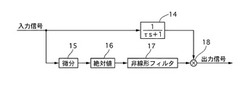
【解決手段】 入力信号uに基づいて規範ヨー応答のベース値を演算する線形フィルタ14と、入力信号uの微分値du/dtを出力する微分器15と、入力信号uの微分値du/dtに基づいてゲインyを演算する非線形フィルタ17と、規範応答ベース値にゲインyを乗算して規範ヨー応答を演算する乗算器18と、を備える。
【解決手段】 入力信号uに基づいて規範ヨー応答のベース値を演算する線形フィルタ14と、入力信号uの微分値du/dtを出力する微分器15と、入力信号uの微分値du/dtに基づいてゲインyを演算する非線形フィルタ17と、規範応答ベース値にゲインyを乗算して規範ヨー応答を演算する乗算器18と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、規範応答演算装置およびそれを用いた車両用操舵装置に関する。
【背景技術】
【0002】
特許文献1には、ハンドル角に応じたヨーレイトの規範応答と実際のヨーレイトとの差に応じてアシストトルクを補正する電動パワーステアリング装置についての開示がある。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−062837号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記従来技術にあっては、低次の伝達関数を用いてハンドル角から規範応答を演算しているため、規範応答のゲインおよび位相の特性を独立に設定できないという問題があった。
【0005】
本発明の目的は、規範応答のゲインおよび位相の特性を独立に設定できる規範応答演算装置およびそれを用いた車両用操舵装置を提供することにある。
【課題を解決するための手段】
【0006】
本発明では、入力信号に応じた規範応答ベース値に対し、入力信号の微分値に基づいて演算したゲインを乗算して規範応答を演算する。
【発明の効果】
【0007】
よって、入力信号の変化速度(微分入力信号)に応じてベース値のゲインのみを修正できるため、規範応答のゲインおよび位相の特性を独立に設定できる。
【図面の簡単な説明】
【0008】
【図1】実施例1の車両用操舵装置の構成図である。
【図2】実施例1のコントローラ8の転舵制御ブロック図である。
【図3】実施例1のコントローラ8で実行される転舵制御処理の流れを示すフローチャートである。
【図4】実施例1の規範ヨー応答演算部11のブロック線図である。
【図5】実施例1の規範ヨー応答演算部11におけるゲイン特性および位相特性の設定方法を示す図である。
【図6】一次遅れ要素の周波数特性図である。
【図7】実施例1の規範ヨー応答演算部11における入力信号および出力信号の時系列波形である。
【図8】実施例1の規範ヨー応答演算部11の周波数特性図である。
【図9】実施例1の車両用操舵装置を搭載した車両でレーンチェンジを行ったときのヨーレイトの時系列波形である。
【図10】ゲインに対してローパスフィルタ処理した場合としない場合の出力応答の時系列波形である。
【図11】実施例2の車両用操舵装置の構成図である。
【図12】実施例2のコントローラ8のアシスト制御ブロック図である。
【発明を実施するための形態】
【0009】
以下、本発明の規範応答演算装置およびそれを用いた車両用操舵装置を実施するための形態を、図面に示す実施例に基づいて説明する。
〔実施例1〕
まず、構成を説明する。
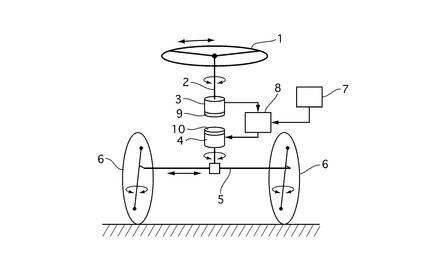
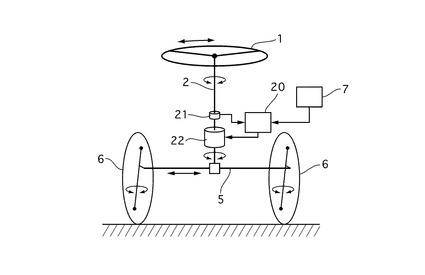
図1は、実施例1の車両用操舵装置の構成図である。
実施例1の車両用操舵装置は、ハンドル1と、コラムシャフト2と、操舵反力モータ3と、転舵モータ(転舵アクチュエータ)4と、ラック(転舵部)5と、前輪(操向輪)のタイヤ6と、ヨーレイトセンサ7と、コントローラ8とを備える。
実施例1の車両用操舵装置は、ハンドル1とタイヤ6を転舵するラック5とが機械的に切り離された、いわゆる、ステア・バイ・ワイヤ(SBW)システムを採用している。
【0010】
コントローラ8は、操舵反力モータ3に設けられたレゾルバ(ハンドル操作計測手段)9により検出された操舵反力モータ3のモータ回転角とヨーレイトセンサ7により検出されたヨーレイトとに基づいて転舵モータ4を駆動し、タイヤ6の転舵角を制御する。ここで、操舵反力モータ3のモータ回転角は、ハンドル1の操舵角(ハンドル角)と一定の関係性を有するため、当該モータ回転角の検出は、ハンドル1の操舵角を求めることと等価である。
また、コントローラ8は、転舵モータ4に設けられたレゾルバ10により検出された転舵モータ4のモータ回転角と操舵反力モータ3の電流値とに基づいて操舵反力モータ3を駆動し、ハンドル1の操舵反力を制御する。ここで、転舵モータ4のモータ回転角は、タイヤ6の転舵角と一定の関係性を有するため、当該モータ回転角の検出は、タイヤ6の転舵角を求めることと等価である。また、操舵反力モータ3の電流値は、ハンドル1に作用する操舵トルクと一定の関係性を有するため、当該電流値の検出は、ハンドル1の操舵反力を求めることと等価である。
【0011】
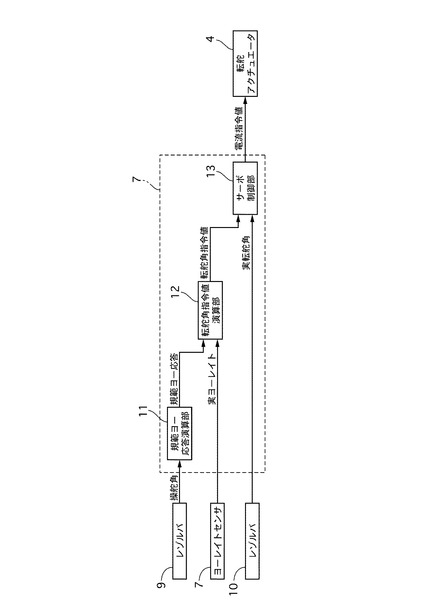
図2は、実施例1のコントローラ8の転舵制御ブロック図である。
規範ヨー応答演算部(規範応答演算手段、規範応答演算装置)11は、レゾルバ9からの入力信号、すなわち、ハンドル1の操舵角に応じたヨーレイトの規範応答(規範ヨー応答)を演算する。規範ヨー応答の演算方法については後述する。
転舵角指令値演算部12は、規範ヨー応答とヨーレイトセンサ7により検出された実際のヨーレイト(実ヨーレイト)との差分に基づいて転舵角指令値を演算する。転舵角指令値の演算は、公知のPID制御、操舵系や車両の動特性を含むような制御系を用いればよい。
サーボ制御部(転舵制御手段)13は、レゾルバ10により検出されたタイヤ6の実際の転舵角(実転舵角)が転舵角指令値と一致するように転舵モータ4を駆動する。
【0012】
[転舵制御処理]
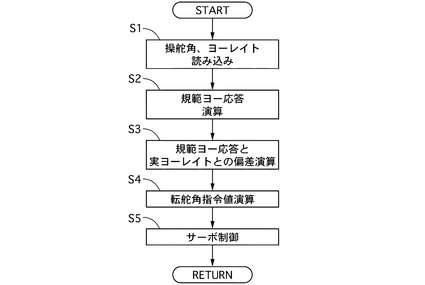
図3は、実施例1のコントローラ8で実行される転舵制御処理の流れを示すフローチャートで、以下、各ステップについて説明する。
ステップS1では、規範ヨー応答演算部11において操舵角を読み込み、転舵角指令値演算部12においてヨーレイトを読み込む。
ステップS2では、規範ヨー応答演算部11において、操舵角に基づいて規範ヨー応答を演算する。
ステップS3では、転舵角指令値演算部12において、ステップS2で演算された規範ヨー応答と実ヨーレイトとの偏差を算出する。
ステップS4では、転舵角指令値演算部12において、ステップS3で算出した偏差に基づいて転舵角指令値を演算する。
ステップS5では、サーボ制御部13において、ステップS4で演算された転舵角指令値に実転舵角が追従するようにサーボ制御を行う。
【0013】
[規範ヨー応答演算]
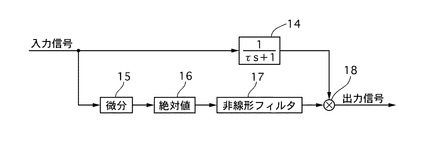
図4は、実施例1の規範ヨー応答演算部11のブロック線図である。
線形フィルタ(規範応答ベース値演算部)14は、1次遅れフィルタであって、入力信号に基づき規範ヨー応答のベース値を演算する。ここで、sはラプラス演算子、τは時定数を意味する。
微分器15は、入力信号を時間微分処理した微分入力信号を出力する。
絶対値演算器16は、微分入力信号の絶対値を出力する。
非線形フィルタ(ゲイン演算部)17は、微分入力信号の絶対値に基づいてゲインを演算し、演算したゲインをローパスフィルタ処理した値を出力する。
乗算器18は、規範ヨー応答のベース値とゲインとを乗算して規範ヨー応答を演算する。
【0014】
[規範ヨー応答演算方法]
まず、規範ヨー応答演算部11のゲイン|h(ω)|、位相∠{h(ω)}を、下記の式(1),(2)の通りあらかじめ設定する。
|h(ω)| := [Gωmin … Gωmax] …(1)
∠{h(ω)} := [Pωmin … Pωmax] …(2)
なお、ωは周波数(角周波数)であり、ω=[ωmin,ωmin+Δω,…,ωmax]とする。
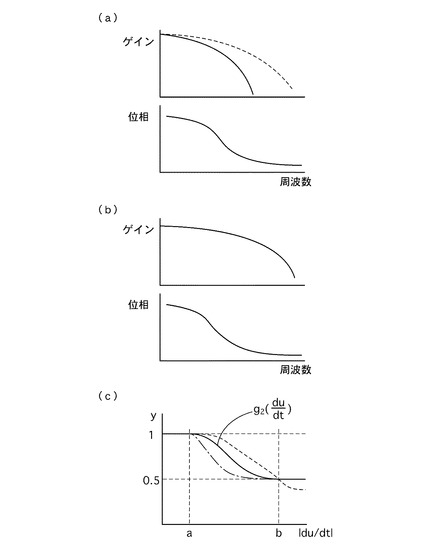
規範ヨー応答演算部11は、線形フィルタではないため、各周波数におけるゲイン、位相の値を任意に設定することが可能となり、図5(b)のような線形フィルタでは、ゲインと位相が独立に設定できないが、本発明を用いることで図5(a)のように位相を固定として、ゲインを所望の特性にするような設計が可能である。
【0015】
続いて、線形フィルタ14は、図5(b)に示すように、式(2)に示した位相特性を実現するフィルタ特性とする。ここでは、簡単のために規範ヨー応答演算部11が1次遅れで表現可能な場合の例を示す。線形フィルタ14の周波数伝達関数k2(jω)を時定数τ2の1次遅れとすると、ゲイン|k2(jω)|、位相∠{k2(jω)}は、下記の式(3),(4)となる。
|k2(jω)| = 1/|τ2jω+1| …(3)
∠{k2(jω)} = ∠{1/(τ2jω+1)} …(4)
なお、jは虚数である。
ここで、式(4)は式(1)と等しくなる、もしくは差異が小さくなるように、時定数τ2を決定する。また、式(3)により求められる線形フィルタ14のゲイン特性は、非線形フィルタ17により補正され、規範ヨー応答演算部11のゲイン特性を実現する。
【0016】
非線形フィルタ17は、入力信号uの微分値(微分入力信号)du/dtの絶対値|du/dt|の関数として、ゲインyを下記の式(5)の通りとする。以下の説明では、入力信号uの微分値du/dtは、絶対値|du/dt|を示すものとする。
y = g2(du/dt) …(5)
ここで、入力信号uの微分値du/dtは、下記の式(6)の通り定める。
du/dt = A(ω)ω …(6)
A(ω)は、各周波数における入力信号uの振幅を意味する。A(ω)は一定値としてもよいし、周波数に応じて可変としてもよいため、振幅は周波数の関数とする。
【0017】
線形フィルタ14、非線形フィルタ17および規範ヨー応答演算部11のゲイン特性は、下記の式(7)で表す関係が成立する。
|k2(jω)| × g2{A(ω)ω} = |H(ω)| …(7)
したがって、規範ヨー応答演算部11において、非線形フィルタ17は、下記の式(8)のように導出することができる。
g2{A(ω)ω} = |H(ω)|/ |k2(jω)| …(8)
式(8)は、式(6)を用いて入力信号uの微分値du/dtと出力信号であるゲインyに対して整理する。
【0018】
ここで、入力信号uの微分値du/dtが第1所定値a以下の場合はy=1とすることで、周波数が低い領域における規範ヨー応答演算部11のゲインを線形フィルタ14のゲイン特性とすることができる。ここで、第1所定値aは下記の式(9)により求めることができる。
a = A(ωa)ωa …(9)
なお、ωaは、y=1を実現したい周波数である。
【0019】
さらに、実施例1では、入力信号uの微分値du/dtが第2所定値b(>a)以上の場合はy=0.5とすることで、周波数が高い領域における規範ヨー応答演算部11のゲインを線形フィルタ14のゲイン特性の0.5とすることができる。なお、y=0.5よりも小さくすることは可能であるが、ゼロよりも小さい値にすると位相が反転する(位相が180度変わる)ため、ゼロよりも大きくする必要がある。ここで、第2所定値bは下記の式(10)により求めることができる。
b = A(ωb)ωb …(10)
なお、ωbは、y=0.5を実現したい周波数である。
また、非線形フィルタ17のゲインyは、入力信号uの微分値du/dtに対して滑らかに変化する特性に設定することで、入力信号uの波形が急激に変化した場合に対しても、出力波形が滑らかに設定することが可能となる。
【0020】
図5(c)の実線は、上記の要領で設定した非線形フィルタ17の特性図であり、図5(c)に示すように、ゲインyは、入力信号uの微分値du/dtが大きいほど小さな値となる特性を有する。ゲインyは、入力信号uの微分値du/dtが大きいとき最小値(0.5)となる。ここで、微分値du/dtが大きいときのゲイン低下を抑えたい場合は一点鎖線の特性とし、逆にゲインを下げたい場合は破線の特性とする。
【0021】
次に、作用を説明する。
従来の車両用操舵装置では、次数の少ない伝達関数を用いて入力(ハンドルの操舵角)に応じた規範ヨー応答を演算しているため、入力に対するゲインおよび位相の特性は、伝達関数の分子、分母のラプラス演算子の各項の係数や、ラプラス演算子の次数により決まる。したがって、ゲインおよび位相の特性を独立に設定できないため、所望の応答を設定することは困難である。
【0022】
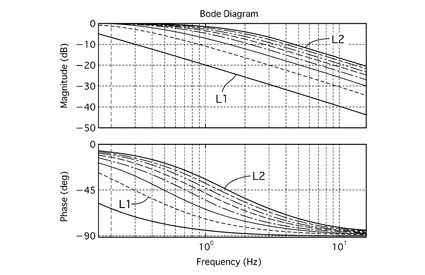
図6は、一次遅れ要素の周波数特性図(ゲイン特性図、位相特性図)であり、定常状態(極低周波)のゲインに対してゲインが3dB小さくなる(位相が45度遅れる)カットオフ周波数を0.3Hzに設定した仕様がL1、同周波数を1.5Hzに設定した仕様がL2である。カットオフ周波数を変更した場合、ゲインと位相は図6のように一意に決まるため、このような線形な1次遅れ要素のみを用いた場合、ゲインおよび位相の特性をそれぞれ独立に設定することはできない。
【0023】
ここで、操舵操作に対する車両応答のゲインおよび位相の特性の適値探索については、下記の各文献で議論されている。
文献A:W.Bergman: Relationships of Certain Vehicle Handling Parameters to Subjective Ratings of Ease of Vehicle Control, Proceedings of 16th FiISITA congress, Tokyo, May 1976
文献B:菅沢、入江、黒木:操安性研究のためのシミュレータビークルの開発、自動車技術 Vol.43,No.4(1989)
文献C:毛利、菅沢:シミュレータビークルの開発と応用、機械学会ロボティックス・メカトロニクス講演会(1992)
文献D:久岡、山本、藤岡、ドライバにとって望ましい車両応答と操舵トルクに関する研究、自動車技術解論文集、Vol.28, No.4, Oct., (1997)
【0024】
ところが、上記各文献においても、線形フィルタの時定数の議論に留まり、ゲインおよび位相の特性を独立に設定する検討はなされていない。
なお、規範ヨー応答を演算する伝達関数の次数を増やすことで、ゲインおよび位相の特性の設計自由度を広くする手法は考えられるが、具体的に所望の特性を設計することは非常に困難である。
【0025】
これに対し、実施例1の規範ヨー応答演算部11では、線形フィルタ14にてドライバ操作による入力信号uに応じた規範応答ベース値を演算し、非線形フィルタ17にて入力信号uの微分値du/dtに基づいてゲインyを演算し、規範応答ベース値にゲインyを掛けて規範ヨー応答を求める。
ここで、非線形フィルタ17は、ドライバ操作の速さ(入力信号uの微分値du/dt)によってベース値のゲイン特性(振幅)のみを修正することが可能である。
【0026】
つまり、線形フィルタ14により規範ヨー応答の位相特性と一致する位相特性を有するベース値を求め、非線形フィルタ17によりベース値のゲイン特性を規範ヨー応答のゲイン特性に修正するためのゲインyを求めることで、入力信号の変化速度に応じてベース値のゲインのみを修正できるため、規範ヨー応答のゲインおよび位相の特性を独立に設定できる。
ゲインと位相の特性を独立に設定可能になると、高周波でゲインが小さく、位相遅れの少ない規範ヨー応答の設定が可能となり、速い入力に対しても遅れのない応答を実現できる。すなわち、ドライバの思い通りの動きを実現できる。
【0027】
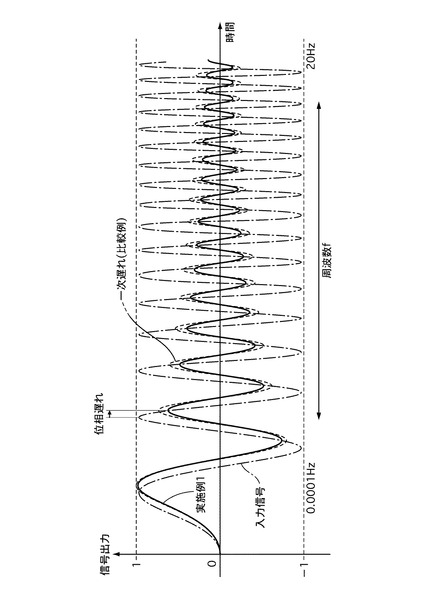
図7は、実施例1の規範ヨー応答演算部11における入力信号および出力信号の時系列波形であり、入力信号は0.0001Hz〜20Hzの範囲でサインスイープさせている。規範ヨー応答演算部11の出力信号を実線、1次遅れフィルタを作用させた比較例を破線で示す。
図7を見れば明らかなように、比較例では、周波数が上がるに連れてゲインが小さくなり、入力信号に対して位相遅れが生じている。一方、実施例1では、位相遅れは比較例と同じであるが、ゲインは比較例よりも小さくすることができる。
【0028】
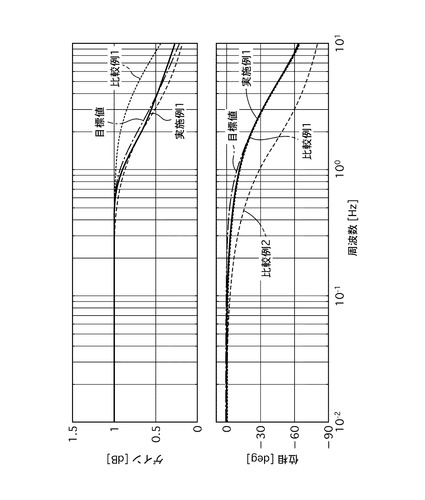
図8は、実施例1の規範ヨー応答演算部11の周波数特性図である。規範ヨー応答演算部11のゲインおよび位相特性を実線、1次遅れフィルタを作用させた2つの比較例のゲインおよび位相特性を2つの破線、目標応答(目標値)を一点鎖線で示す。
目標応答は、高周波のゲインを抑えつつ、高周波の位相を改善した(遅れを抑えた)ものである。比較例1および2の場合、時定数の大きさ(カットオフ周波数の違い)によって、ゲインと位相が一意に決まってしまう。このため、比較例1のように位相特性を目標応答に合わせると、高周波のゲインが目標応答に対して高くなりすぎるため、収束性および安定性が低下する。一方、比較例2のようにゲイン特性を目標応答に合わせると、高周波での応答性が低下する。
これに対し、実施例1では、線形フィルタ14の位相特性を比較例1と同じ特性とし、非線形フィルタ17でゲインのみを補正することで、比較例2と同じゲイン特性が得られる。つまり、ゲインおよび位相の特性を任意に設定できるため、所望の目標応答を実現できる。
【0029】
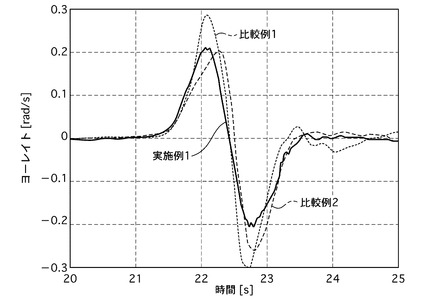
図9は、実施例1の車両用操舵装置を搭載した車両でレーンチェンジを行ったときのヨーレイトの時系列波形である。実施例1を実線、1次遅れフィルタを作用させた2つの比較例を破線で示す。
時定数が小さな比較例1の場合は、応答性は良いが、ヨーレイトの振幅が大きいため、収束性および安定性が悪化している。また、時定数の大きな比較例2の場合は、収束性および安定性は高いが、応答性が低下している。
一方、実施例1では、応答性を確保しつつ、安定した応答を示した。すなわち、実施例1では、ドライバの操舵操作に対する応答性を確保しつつ、良好な収束性や安定性を得ることができるため、運転性に優れている。
【0030】
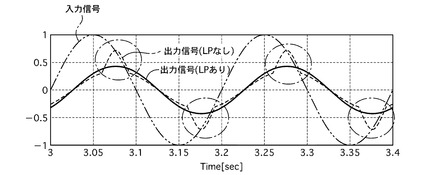
図10は、非線形フィルタ17において、演算したゲインに対してローパスフィルタ処理をした場合(実線)と、しない場合(破線)の出力応答(時系列応答)である。入力信号に基づいて演算したゲインに対して、ローパスフィルタ処理を行わない場合、出力信号がピークとなる位置近傍(同図中の一点鎖線の円)において、高周波の凸が生じてしまい滑らかな信号を出力することができない。一方、ローパスフィルタ処理を行うと、出力信号は滑らかな出力となる。すなわち、実装の観点からは非線形フィルタにおいてローパスフィルタ処理を行うことが大変重要である。
【0031】
次に、効果を説明する。
実施例1の規範ヨー応答演算部11および車両操舵装置にあっては、以下に列挙する効果を奏する。
(1) 規範ヨー応答演算部11は、入力信号uに基づいて規範ヨー応答のベース値を演算する線形フィルタ14と、入力信号uの微分値du/dtを出力する微分器15と、入力信号uの微分値du/dtに基づいてゲインyを演算する非線形フィルタ17と、規範応答ベース値にゲインyを乗算して規範ヨー応答を演算する乗算器18と、を備える。
よって、入力信号uの変化速度に応じてベース値のゲインのみを修正できるため、規範ヨー応答のゲインおよび位相の特性を独立に設定できる。
【0032】
(2) 線形フィルタ14は、1次遅れのフィルタである。
よって、操舵入力の高周波ゲインを抑え、位相を変更することができる。
【0033】
(3) 入力信号uの微分値du/dtとゲインyとの関係を非線形とした。
よって、ドライバの操作入力に対して算出する規範ヨー応答のゲイン特性を所望の特性に調整できる。
【0034】
(4) 非線形フィルタ17は、入力信号uの微分値du/dtが大きくなるほどゲインyを小さくする。
すなわち、操舵速度が高い場合はベース値のゲインを小さくし、操舵速度が低い場合はベース値のゲインを大きくすることで、ベース値の位相特性は修正せず、ゲイン特性のみを修正できる。
【0035】
(5) 非線形フィルタ17は、入力信号uの微分値du/dtが第1所定値a以下である場合には、ゲインyを1とする。
よって、操舵速度が低い場合は規範ヨー応答のゲイン特性をベース値のゲイン特性とすることができる。
【0036】
(6) 非線形フィルタ17は、規範ヨー応答のゲイン特性をベース値のゲイン特性と一致させたい入力信号uの周波数の最大値に基づいて第1所定値aを設定する。
よって、入力信号uの周波数が低い場合は規範ヨー応答のゲイン特性をベース値のゲイン特性とすることができる。
【0037】
(7) 非線形フィルタ17は、ゲインyをゼロよりも大きな値とする。
よって、規範ヨー応答の位相が反転するのを防止できる。
【0038】
(8) 非線形フィルタ17は、入力信号uの微分値du/dtが第2所定値b以上である場合には、ゲインyを一定値(0.5)とする。
よって、操舵速度が高い場合は規範ヨー応答のゲイン特性を一定以上変化させないことが可能である。
【0039】
(9) 非線形フィルタ17は、入力信号uの微分値du/dtの変化に対してゲインyを滑らかに変化させる。
よって、操舵角の周波数変化に伴う規範ヨー応答のゲイン特性の急変により、車両挙動が急激に変化するのを抑制できる。
【0040】
(10) 非線形フィルタ17は、入力信号uの微分値du/dtの変化に応じてゲイン特性を決定し、そのゲイン特性に対して、ローパスフィルタ処理してゲインを出力する。
よって、出力信号の大きさがピークとなる場合の波形変化を抑えて滑らかな波形(ゲイン)を出力することができる。
【0041】
(11) 車両用操舵装置は、タイヤ6を転舵するラック5に転舵トルクを出力する転舵モータ4と、ハンドル角に応じた入力信号uを出力するレゾルバ9と、入力信号uに応じた規範ヨー応答を演算する規範ヨー応答演算部11と、規範ヨー応答に基づいて転舵モータ4を制御するサーボ制御部13と、を備える。
よって、車両のヨー応答を操舵角に対応した規範ヨー応答に追従させることができ、ドライバの思い通りの動きを実現できる。
【0042】
〔実施例2〕
まず、構成を説明する。
図11は、実施例2の車両用操舵装置の構成図である。
実施例2の車両用操舵装置は、実施例1に対し、ハンドル1とタイヤ6を転舵するラック5とが機械的に連結されたコンベンショナルな操舵システムを採用している点で異なる。以下、実施例1と異なる部分について説明する。
コントローラ20は、トルクセンサ(ハンドル操作計測手段)21により検出された操舵トルク(ハンドルトルク)に基づいて、パワーステアリングモータ(転舵アクチュエータ)22を駆動し、ドライバの操舵負荷を軽減するためのアシストトルクを制御する。
【0043】
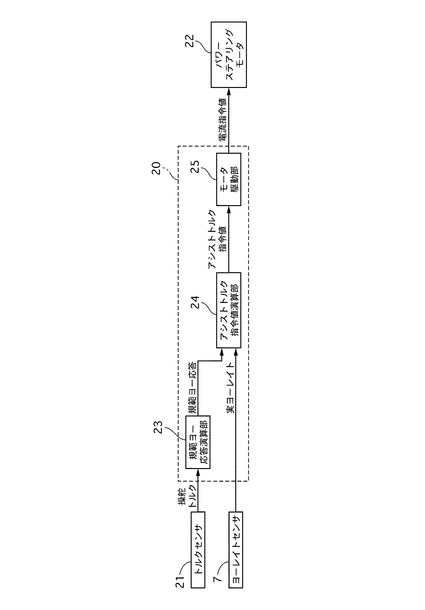
図12は、実施例2のコントローラ8のアシスト制御ブロック図である。
規範ヨー応答演算部(規範応答演算手段、規範応答演算装置)23は、トルクセンサ21からの入力信号、すなわち、操舵トルクに応じた規範ヨー応答を演算する。規範ヨー応答の演算方法については、入力信号を操舵角から操舵トルクに変更した以外は実施例1と同様であるため、説明を省略する。
アシストトルク指令値演算部24は規範ヨー応答とヨーレイトセンサ7により検出された実際のヨーレイト(実ヨーレイト)との差分に基づいてアシストトルク指令値を演算する。アシストトルク指令値の演算は、公知のPID制御、操舵系や車両の動特性を含むような制御系を用いればよい。
モータ駆動部(転舵制御手段)25は、アシストトルク指令値に応じた電流指令値を演算し、パワーステアリングモータ22を駆動する。
実施例2の規範ヨー応答演算部23および車両用操舵装置にあっては、上記のように構成したため、実施例1の効果(1)〜(11)と同様の効果が得られる。
【0044】
(他の実施例)
以上、本発明を実施するための形態を実施例に基づき説明したが、本発明の具体的な構成は、実施例に限定されるものではなく、発明の要旨を逸脱しない範囲の設計変更等があっても本発明に含まれる。
例えば、実施例では、ヨーレイトの規範応答について説明したが、制御対象は横加速度や車体横滑り角としてもよい。
実施例では、規範応答ベース値演算部を1次遅れの線形フィルタとしたが、2次遅れ等のより高次な線形フィルタを用いてもよい。また、入力信号の周波数特性を変更せずにそのまま出力するフィルタレスとしてもよい。
【符号の説明】
【0045】
1 ハンドル
2 コラムシャフト
3 操舵反力モータ
4 転舵モータ(転舵アクチュエータ)
5 ラック(転舵部)
6 タイヤ
7 ヨーレイトセンサ
8 コントローラ
9 レゾルバ(ハンドル操作計測手段)
10 レゾルバ(実舵角計測手段)
11 規範ヨー応答演算部(規範応答演算手段、規範応答演算装置)
12 転舵角指令値演算部
13 サーボ制御部(転舵制御手段)
14 線形フィルタ(規範応答ベース値演算部)
15 微分器
16 絶対値演算器
17 非線形フィルタ(ゲイン演算部)
18 乗算器
20 コントローラ
21 トルクセンサ(ハンドル操作計測手段)
22 パワーステアリングモータ(転舵アクチュエータ)
23 規範ヨー応答演算部(規範応答演算手段、規範応答演算装置)
24 アシストトルク指令値演算部
25 モータ駆動部(転舵制御手段)
【技術分野】
【0001】
本発明は、規範応答演算装置およびそれを用いた車両用操舵装置に関する。
【背景技術】
【0002】
特許文献1には、ハンドル角に応じたヨーレイトの規範応答と実際のヨーレイトとの差に応じてアシストトルクを補正する電動パワーステアリング装置についての開示がある。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−062837号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記従来技術にあっては、低次の伝達関数を用いてハンドル角から規範応答を演算しているため、規範応答のゲインおよび位相の特性を独立に設定できないという問題があった。
【0005】
本発明の目的は、規範応答のゲインおよび位相の特性を独立に設定できる規範応答演算装置およびそれを用いた車両用操舵装置を提供することにある。
【課題を解決するための手段】
【0006】
本発明では、入力信号に応じた規範応答ベース値に対し、入力信号の微分値に基づいて演算したゲインを乗算して規範応答を演算する。
【発明の効果】
【0007】
よって、入力信号の変化速度(微分入力信号)に応じてベース値のゲインのみを修正できるため、規範応答のゲインおよび位相の特性を独立に設定できる。
【図面の簡単な説明】
【0008】
【図1】実施例1の車両用操舵装置の構成図である。
【図2】実施例1のコントローラ8の転舵制御ブロック図である。
【図3】実施例1のコントローラ8で実行される転舵制御処理の流れを示すフローチャートである。
【図4】実施例1の規範ヨー応答演算部11のブロック線図である。
【図5】実施例1の規範ヨー応答演算部11におけるゲイン特性および位相特性の設定方法を示す図である。
【図6】一次遅れ要素の周波数特性図である。
【図7】実施例1の規範ヨー応答演算部11における入力信号および出力信号の時系列波形である。
【図8】実施例1の規範ヨー応答演算部11の周波数特性図である。
【図9】実施例1の車両用操舵装置を搭載した車両でレーンチェンジを行ったときのヨーレイトの時系列波形である。
【図10】ゲインに対してローパスフィルタ処理した場合としない場合の出力応答の時系列波形である。
【図11】実施例2の車両用操舵装置の構成図である。
【図12】実施例2のコントローラ8のアシスト制御ブロック図である。
【発明を実施するための形態】
【0009】
以下、本発明の規範応答演算装置およびそれを用いた車両用操舵装置を実施するための形態を、図面に示す実施例に基づいて説明する。
〔実施例1〕
まず、構成を説明する。
図1は、実施例1の車両用操舵装置の構成図である。
実施例1の車両用操舵装置は、ハンドル1と、コラムシャフト2と、操舵反力モータ3と、転舵モータ(転舵アクチュエータ)4と、ラック(転舵部)5と、前輪(操向輪)のタイヤ6と、ヨーレイトセンサ7と、コントローラ8とを備える。
実施例1の車両用操舵装置は、ハンドル1とタイヤ6を転舵するラック5とが機械的に切り離された、いわゆる、ステア・バイ・ワイヤ(SBW)システムを採用している。
【0010】
コントローラ8は、操舵反力モータ3に設けられたレゾルバ(ハンドル操作計測手段)9により検出された操舵反力モータ3のモータ回転角とヨーレイトセンサ7により検出されたヨーレイトとに基づいて転舵モータ4を駆動し、タイヤ6の転舵角を制御する。ここで、操舵反力モータ3のモータ回転角は、ハンドル1の操舵角(ハンドル角)と一定の関係性を有するため、当該モータ回転角の検出は、ハンドル1の操舵角を求めることと等価である。
また、コントローラ8は、転舵モータ4に設けられたレゾルバ10により検出された転舵モータ4のモータ回転角と操舵反力モータ3の電流値とに基づいて操舵反力モータ3を駆動し、ハンドル1の操舵反力を制御する。ここで、転舵モータ4のモータ回転角は、タイヤ6の転舵角と一定の関係性を有するため、当該モータ回転角の検出は、タイヤ6の転舵角を求めることと等価である。また、操舵反力モータ3の電流値は、ハンドル1に作用する操舵トルクと一定の関係性を有するため、当該電流値の検出は、ハンドル1の操舵反力を求めることと等価である。
【0011】
図2は、実施例1のコントローラ8の転舵制御ブロック図である。
規範ヨー応答演算部(規範応答演算手段、規範応答演算装置)11は、レゾルバ9からの入力信号、すなわち、ハンドル1の操舵角に応じたヨーレイトの規範応答(規範ヨー応答)を演算する。規範ヨー応答の演算方法については後述する。
転舵角指令値演算部12は、規範ヨー応答とヨーレイトセンサ7により検出された実際のヨーレイト(実ヨーレイト)との差分に基づいて転舵角指令値を演算する。転舵角指令値の演算は、公知のPID制御、操舵系や車両の動特性を含むような制御系を用いればよい。
サーボ制御部(転舵制御手段)13は、レゾルバ10により検出されたタイヤ6の実際の転舵角(実転舵角)が転舵角指令値と一致するように転舵モータ4を駆動する。
【0012】
[転舵制御処理]
図3は、実施例1のコントローラ8で実行される転舵制御処理の流れを示すフローチャートで、以下、各ステップについて説明する。
ステップS1では、規範ヨー応答演算部11において操舵角を読み込み、転舵角指令値演算部12においてヨーレイトを読み込む。
ステップS2では、規範ヨー応答演算部11において、操舵角に基づいて規範ヨー応答を演算する。
ステップS3では、転舵角指令値演算部12において、ステップS2で演算された規範ヨー応答と実ヨーレイトとの偏差を算出する。
ステップS4では、転舵角指令値演算部12において、ステップS3で算出した偏差に基づいて転舵角指令値を演算する。
ステップS5では、サーボ制御部13において、ステップS4で演算された転舵角指令値に実転舵角が追従するようにサーボ制御を行う。
【0013】
[規範ヨー応答演算]
図4は、実施例1の規範ヨー応答演算部11のブロック線図である。
線形フィルタ(規範応答ベース値演算部)14は、1次遅れフィルタであって、入力信号に基づき規範ヨー応答のベース値を演算する。ここで、sはラプラス演算子、τは時定数を意味する。
微分器15は、入力信号を時間微分処理した微分入力信号を出力する。
絶対値演算器16は、微分入力信号の絶対値を出力する。
非線形フィルタ(ゲイン演算部)17は、微分入力信号の絶対値に基づいてゲインを演算し、演算したゲインをローパスフィルタ処理した値を出力する。
乗算器18は、規範ヨー応答のベース値とゲインとを乗算して規範ヨー応答を演算する。
【0014】
[規範ヨー応答演算方法]
まず、規範ヨー応答演算部11のゲイン|h(ω)|、位相∠{h(ω)}を、下記の式(1),(2)の通りあらかじめ設定する。
|h(ω)| := [Gωmin … Gωmax] …(1)
∠{h(ω)} := [Pωmin … Pωmax] …(2)
なお、ωは周波数(角周波数)であり、ω=[ωmin,ωmin+Δω,…,ωmax]とする。
規範ヨー応答演算部11は、線形フィルタではないため、各周波数におけるゲイン、位相の値を任意に設定することが可能となり、図5(b)のような線形フィルタでは、ゲインと位相が独立に設定できないが、本発明を用いることで図5(a)のように位相を固定として、ゲインを所望の特性にするような設計が可能である。
【0015】
続いて、線形フィルタ14は、図5(b)に示すように、式(2)に示した位相特性を実現するフィルタ特性とする。ここでは、簡単のために規範ヨー応答演算部11が1次遅れで表現可能な場合の例を示す。線形フィルタ14の周波数伝達関数k2(jω)を時定数τ2の1次遅れとすると、ゲイン|k2(jω)|、位相∠{k2(jω)}は、下記の式(3),(4)となる。
|k2(jω)| = 1/|τ2jω+1| …(3)
∠{k2(jω)} = ∠{1/(τ2jω+1)} …(4)
なお、jは虚数である。
ここで、式(4)は式(1)と等しくなる、もしくは差異が小さくなるように、時定数τ2を決定する。また、式(3)により求められる線形フィルタ14のゲイン特性は、非線形フィルタ17により補正され、規範ヨー応答演算部11のゲイン特性を実現する。
【0016】
非線形フィルタ17は、入力信号uの微分値(微分入力信号)du/dtの絶対値|du/dt|の関数として、ゲインyを下記の式(5)の通りとする。以下の説明では、入力信号uの微分値du/dtは、絶対値|du/dt|を示すものとする。
y = g2(du/dt) …(5)
ここで、入力信号uの微分値du/dtは、下記の式(6)の通り定める。
du/dt = A(ω)ω …(6)
A(ω)は、各周波数における入力信号uの振幅を意味する。A(ω)は一定値としてもよいし、周波数に応じて可変としてもよいため、振幅は周波数の関数とする。
【0017】
線形フィルタ14、非線形フィルタ17および規範ヨー応答演算部11のゲイン特性は、下記の式(7)で表す関係が成立する。
|k2(jω)| × g2{A(ω)ω} = |H(ω)| …(7)
したがって、規範ヨー応答演算部11において、非線形フィルタ17は、下記の式(8)のように導出することができる。
g2{A(ω)ω} = |H(ω)|/ |k2(jω)| …(8)
式(8)は、式(6)を用いて入力信号uの微分値du/dtと出力信号であるゲインyに対して整理する。
【0018】
ここで、入力信号uの微分値du/dtが第1所定値a以下の場合はy=1とすることで、周波数が低い領域における規範ヨー応答演算部11のゲインを線形フィルタ14のゲイン特性とすることができる。ここで、第1所定値aは下記の式(9)により求めることができる。
a = A(ωa)ωa …(9)
なお、ωaは、y=1を実現したい周波数である。
【0019】
さらに、実施例1では、入力信号uの微分値du/dtが第2所定値b(>a)以上の場合はy=0.5とすることで、周波数が高い領域における規範ヨー応答演算部11のゲインを線形フィルタ14のゲイン特性の0.5とすることができる。なお、y=0.5よりも小さくすることは可能であるが、ゼロよりも小さい値にすると位相が反転する(位相が180度変わる)ため、ゼロよりも大きくする必要がある。ここで、第2所定値bは下記の式(10)により求めることができる。
b = A(ωb)ωb …(10)
なお、ωbは、y=0.5を実現したい周波数である。
また、非線形フィルタ17のゲインyは、入力信号uの微分値du/dtに対して滑らかに変化する特性に設定することで、入力信号uの波形が急激に変化した場合に対しても、出力波形が滑らかに設定することが可能となる。
【0020】
図5(c)の実線は、上記の要領で設定した非線形フィルタ17の特性図であり、図5(c)に示すように、ゲインyは、入力信号uの微分値du/dtが大きいほど小さな値となる特性を有する。ゲインyは、入力信号uの微分値du/dtが大きいとき最小値(0.5)となる。ここで、微分値du/dtが大きいときのゲイン低下を抑えたい場合は一点鎖線の特性とし、逆にゲインを下げたい場合は破線の特性とする。
【0021】
次に、作用を説明する。
従来の車両用操舵装置では、次数の少ない伝達関数を用いて入力(ハンドルの操舵角)に応じた規範ヨー応答を演算しているため、入力に対するゲインおよび位相の特性は、伝達関数の分子、分母のラプラス演算子の各項の係数や、ラプラス演算子の次数により決まる。したがって、ゲインおよび位相の特性を独立に設定できないため、所望の応答を設定することは困難である。
【0022】
図6は、一次遅れ要素の周波数特性図(ゲイン特性図、位相特性図)であり、定常状態(極低周波)のゲインに対してゲインが3dB小さくなる(位相が45度遅れる)カットオフ周波数を0.3Hzに設定した仕様がL1、同周波数を1.5Hzに設定した仕様がL2である。カットオフ周波数を変更した場合、ゲインと位相は図6のように一意に決まるため、このような線形な1次遅れ要素のみを用いた場合、ゲインおよび位相の特性をそれぞれ独立に設定することはできない。
【0023】
ここで、操舵操作に対する車両応答のゲインおよび位相の特性の適値探索については、下記の各文献で議論されている。
文献A:W.Bergman: Relationships of Certain Vehicle Handling Parameters to Subjective Ratings of Ease of Vehicle Control, Proceedings of 16th FiISITA congress, Tokyo, May 1976
文献B:菅沢、入江、黒木:操安性研究のためのシミュレータビークルの開発、自動車技術 Vol.43,No.4(1989)
文献C:毛利、菅沢:シミュレータビークルの開発と応用、機械学会ロボティックス・メカトロニクス講演会(1992)
文献D:久岡、山本、藤岡、ドライバにとって望ましい車両応答と操舵トルクに関する研究、自動車技術解論文集、Vol.28, No.4, Oct., (1997)
【0024】
ところが、上記各文献においても、線形フィルタの時定数の議論に留まり、ゲインおよび位相の特性を独立に設定する検討はなされていない。
なお、規範ヨー応答を演算する伝達関数の次数を増やすことで、ゲインおよび位相の特性の設計自由度を広くする手法は考えられるが、具体的に所望の特性を設計することは非常に困難である。
【0025】
これに対し、実施例1の規範ヨー応答演算部11では、線形フィルタ14にてドライバ操作による入力信号uに応じた規範応答ベース値を演算し、非線形フィルタ17にて入力信号uの微分値du/dtに基づいてゲインyを演算し、規範応答ベース値にゲインyを掛けて規範ヨー応答を求める。
ここで、非線形フィルタ17は、ドライバ操作の速さ(入力信号uの微分値du/dt)によってベース値のゲイン特性(振幅)のみを修正することが可能である。
【0026】
つまり、線形フィルタ14により規範ヨー応答の位相特性と一致する位相特性を有するベース値を求め、非線形フィルタ17によりベース値のゲイン特性を規範ヨー応答のゲイン特性に修正するためのゲインyを求めることで、入力信号の変化速度に応じてベース値のゲインのみを修正できるため、規範ヨー応答のゲインおよび位相の特性を独立に設定できる。
ゲインと位相の特性を独立に設定可能になると、高周波でゲインが小さく、位相遅れの少ない規範ヨー応答の設定が可能となり、速い入力に対しても遅れのない応答を実現できる。すなわち、ドライバの思い通りの動きを実現できる。
【0027】
図7は、実施例1の規範ヨー応答演算部11における入力信号および出力信号の時系列波形であり、入力信号は0.0001Hz〜20Hzの範囲でサインスイープさせている。規範ヨー応答演算部11の出力信号を実線、1次遅れフィルタを作用させた比較例を破線で示す。
図7を見れば明らかなように、比較例では、周波数が上がるに連れてゲインが小さくなり、入力信号に対して位相遅れが生じている。一方、実施例1では、位相遅れは比較例と同じであるが、ゲインは比較例よりも小さくすることができる。
【0028】
図8は、実施例1の規範ヨー応答演算部11の周波数特性図である。規範ヨー応答演算部11のゲインおよび位相特性を実線、1次遅れフィルタを作用させた2つの比較例のゲインおよび位相特性を2つの破線、目標応答(目標値)を一点鎖線で示す。
目標応答は、高周波のゲインを抑えつつ、高周波の位相を改善した(遅れを抑えた)ものである。比較例1および2の場合、時定数の大きさ(カットオフ周波数の違い)によって、ゲインと位相が一意に決まってしまう。このため、比較例1のように位相特性を目標応答に合わせると、高周波のゲインが目標応答に対して高くなりすぎるため、収束性および安定性が低下する。一方、比較例2のようにゲイン特性を目標応答に合わせると、高周波での応答性が低下する。
これに対し、実施例1では、線形フィルタ14の位相特性を比較例1と同じ特性とし、非線形フィルタ17でゲインのみを補正することで、比較例2と同じゲイン特性が得られる。つまり、ゲインおよび位相の特性を任意に設定できるため、所望の目標応答を実現できる。
【0029】
図9は、実施例1の車両用操舵装置を搭載した車両でレーンチェンジを行ったときのヨーレイトの時系列波形である。実施例1を実線、1次遅れフィルタを作用させた2つの比較例を破線で示す。
時定数が小さな比較例1の場合は、応答性は良いが、ヨーレイトの振幅が大きいため、収束性および安定性が悪化している。また、時定数の大きな比較例2の場合は、収束性および安定性は高いが、応答性が低下している。
一方、実施例1では、応答性を確保しつつ、安定した応答を示した。すなわち、実施例1では、ドライバの操舵操作に対する応答性を確保しつつ、良好な収束性や安定性を得ることができるため、運転性に優れている。
【0030】
図10は、非線形フィルタ17において、演算したゲインに対してローパスフィルタ処理をした場合(実線)と、しない場合(破線)の出力応答(時系列応答)である。入力信号に基づいて演算したゲインに対して、ローパスフィルタ処理を行わない場合、出力信号がピークとなる位置近傍(同図中の一点鎖線の円)において、高周波の凸が生じてしまい滑らかな信号を出力することができない。一方、ローパスフィルタ処理を行うと、出力信号は滑らかな出力となる。すなわち、実装の観点からは非線形フィルタにおいてローパスフィルタ処理を行うことが大変重要である。
【0031】
次に、効果を説明する。
実施例1の規範ヨー応答演算部11および車両操舵装置にあっては、以下に列挙する効果を奏する。
(1) 規範ヨー応答演算部11は、入力信号uに基づいて規範ヨー応答のベース値を演算する線形フィルタ14と、入力信号uの微分値du/dtを出力する微分器15と、入力信号uの微分値du/dtに基づいてゲインyを演算する非線形フィルタ17と、規範応答ベース値にゲインyを乗算して規範ヨー応答を演算する乗算器18と、を備える。
よって、入力信号uの変化速度に応じてベース値のゲインのみを修正できるため、規範ヨー応答のゲインおよび位相の特性を独立に設定できる。
【0032】
(2) 線形フィルタ14は、1次遅れのフィルタである。
よって、操舵入力の高周波ゲインを抑え、位相を変更することができる。
【0033】
(3) 入力信号uの微分値du/dtとゲインyとの関係を非線形とした。
よって、ドライバの操作入力に対して算出する規範ヨー応答のゲイン特性を所望の特性に調整できる。
【0034】
(4) 非線形フィルタ17は、入力信号uの微分値du/dtが大きくなるほどゲインyを小さくする。
すなわち、操舵速度が高い場合はベース値のゲインを小さくし、操舵速度が低い場合はベース値のゲインを大きくすることで、ベース値の位相特性は修正せず、ゲイン特性のみを修正できる。
【0035】
(5) 非線形フィルタ17は、入力信号uの微分値du/dtが第1所定値a以下である場合には、ゲインyを1とする。
よって、操舵速度が低い場合は規範ヨー応答のゲイン特性をベース値のゲイン特性とすることができる。
【0036】
(6) 非線形フィルタ17は、規範ヨー応答のゲイン特性をベース値のゲイン特性と一致させたい入力信号uの周波数の最大値に基づいて第1所定値aを設定する。
よって、入力信号uの周波数が低い場合は規範ヨー応答のゲイン特性をベース値のゲイン特性とすることができる。
【0037】
(7) 非線形フィルタ17は、ゲインyをゼロよりも大きな値とする。
よって、規範ヨー応答の位相が反転するのを防止できる。
【0038】
(8) 非線形フィルタ17は、入力信号uの微分値du/dtが第2所定値b以上である場合には、ゲインyを一定値(0.5)とする。
よって、操舵速度が高い場合は規範ヨー応答のゲイン特性を一定以上変化させないことが可能である。
【0039】
(9) 非線形フィルタ17は、入力信号uの微分値du/dtの変化に対してゲインyを滑らかに変化させる。
よって、操舵角の周波数変化に伴う規範ヨー応答のゲイン特性の急変により、車両挙動が急激に変化するのを抑制できる。
【0040】
(10) 非線形フィルタ17は、入力信号uの微分値du/dtの変化に応じてゲイン特性を決定し、そのゲイン特性に対して、ローパスフィルタ処理してゲインを出力する。
よって、出力信号の大きさがピークとなる場合の波形変化を抑えて滑らかな波形(ゲイン)を出力することができる。
【0041】
(11) 車両用操舵装置は、タイヤ6を転舵するラック5に転舵トルクを出力する転舵モータ4と、ハンドル角に応じた入力信号uを出力するレゾルバ9と、入力信号uに応じた規範ヨー応答を演算する規範ヨー応答演算部11と、規範ヨー応答に基づいて転舵モータ4を制御するサーボ制御部13と、を備える。
よって、車両のヨー応答を操舵角に対応した規範ヨー応答に追従させることができ、ドライバの思い通りの動きを実現できる。
【0042】
〔実施例2〕
まず、構成を説明する。
図11は、実施例2の車両用操舵装置の構成図である。
実施例2の車両用操舵装置は、実施例1に対し、ハンドル1とタイヤ6を転舵するラック5とが機械的に連結されたコンベンショナルな操舵システムを採用している点で異なる。以下、実施例1と異なる部分について説明する。
コントローラ20は、トルクセンサ(ハンドル操作計測手段)21により検出された操舵トルク(ハンドルトルク)に基づいて、パワーステアリングモータ(転舵アクチュエータ)22を駆動し、ドライバの操舵負荷を軽減するためのアシストトルクを制御する。
【0043】
図12は、実施例2のコントローラ8のアシスト制御ブロック図である。
規範ヨー応答演算部(規範応答演算手段、規範応答演算装置)23は、トルクセンサ21からの入力信号、すなわち、操舵トルクに応じた規範ヨー応答を演算する。規範ヨー応答の演算方法については、入力信号を操舵角から操舵トルクに変更した以外は実施例1と同様であるため、説明を省略する。
アシストトルク指令値演算部24は規範ヨー応答とヨーレイトセンサ7により検出された実際のヨーレイト(実ヨーレイト)との差分に基づいてアシストトルク指令値を演算する。アシストトルク指令値の演算は、公知のPID制御、操舵系や車両の動特性を含むような制御系を用いればよい。
モータ駆動部(転舵制御手段)25は、アシストトルク指令値に応じた電流指令値を演算し、パワーステアリングモータ22を駆動する。
実施例2の規範ヨー応答演算部23および車両用操舵装置にあっては、上記のように構成したため、実施例1の効果(1)〜(11)と同様の効果が得られる。
【0044】
(他の実施例)
以上、本発明を実施するための形態を実施例に基づき説明したが、本発明の具体的な構成は、実施例に限定されるものではなく、発明の要旨を逸脱しない範囲の設計変更等があっても本発明に含まれる。
例えば、実施例では、ヨーレイトの規範応答について説明したが、制御対象は横加速度や車体横滑り角としてもよい。
実施例では、規範応答ベース値演算部を1次遅れの線形フィルタとしたが、2次遅れ等のより高次な線形フィルタを用いてもよい。また、入力信号の周波数特性を変更せずにそのまま出力するフィルタレスとしてもよい。
【符号の説明】
【0045】
1 ハンドル
2 コラムシャフト
3 操舵反力モータ
4 転舵モータ(転舵アクチュエータ)
5 ラック(転舵部)
6 タイヤ
7 ヨーレイトセンサ
8 コントローラ
9 レゾルバ(ハンドル操作計測手段)
10 レゾルバ(実舵角計測手段)
11 規範ヨー応答演算部(規範応答演算手段、規範応答演算装置)
12 転舵角指令値演算部
13 サーボ制御部(転舵制御手段)
14 線形フィルタ(規範応答ベース値演算部)
15 微分器
16 絶対値演算器
17 非線形フィルタ(ゲイン演算部)
18 乗算器
20 コントローラ
21 トルクセンサ(ハンドル操作計測手段)
22 パワーステアリングモータ(転舵アクチュエータ)
23 規範ヨー応答演算部(規範応答演算手段、規範応答演算装置)
24 アシストトルク指令値演算部
25 モータ駆動部(転舵制御手段)
【特許請求の範囲】
【請求項1】
入力信号に応じた制御対象の規範応答を演算する規範応答演算装置であって、
前記入力信号に基づいて前記規範応答のベース値を演算する規範応答ベース値演算部と、
前記入力信号を微分した微分入力信号を出力する微分器と、
前記微分入力信号に基づいてゲインを演算するゲイン演算部と、
前記規範応答ベース値に前記ゲインを乗算して前記規範応答を演算する乗算器と、
を備えたことを特徴とする規範応答演算装置。
【請求項2】
請求項1に記載の規範応答演算装置において、
前記規範応答ベース値演算部は、1次遅れのフィルタであることを特徴とする規範応答演算装置。
【請求項3】
請求項1または請求項2に記載の規範応答演算装置において、
前記微分入力信号と前記ゲインとの関係を非線形としたことを特徴とする規範応答演算装置。
【請求項4】
請求項1ないし請求項3のいずれか1項に記載のフィルタにおいて、
前記ゲイン演算部は、前記微分入力信号が大きくなるほど前記ゲインを小さくすることを特徴とする規範応答演算装置。
【請求項5】
請求項1ないし請求項4のいずれか1項に記載の規範応答演算装置において、
前記ゲイン演算部は、前記微分入力信号が第1所定値以下である場合には、前記ゲインを1とすることを特徴とする規範応答演算装置。
【請求項6】
請求項5に記載の規範応答演算装置において、
前記ゲイン演算部は、前記規範応答のゲイン特性を前記ベース値のゲイン特性と一致させたい前記入力信号の周波数の最大値に基づいて前記第1所定値を設定することを特徴とする規範応答演算装置。
【請求項7】
請求項1ないし請求項6のいずれか1項に記載の規範応答演算装置において、
前記ゲイン演算部は、前記ゲインをゼロ以上とすることを特徴とする規範応答演算装置。
【請求項8】
請求項1ないし請求項7のいずれか1項に記載の規範応答演算装置において、
前記ゲイン演算部は、前記微分入力信号が第2所定値以上である場合には、前記ゲインを一定値とすることを特徴とする規範応答演算装置。
【請求項9】
請求項1ないし請求項8のいずれか1項に記載の規範応答演算装置において、
前記ゲイン演算部は、前記微分入力信号の変化に対して前記ゲインを滑らかに変化させることを特徴とする規範応答演算装置。
【請求項10】
請求項1ないし請求項9のいずれか1項に記載の規範応答演算装置において、
前記ゲイン演算部は、前記微分入力信号の変化に応じて前記ゲイン特性を決定し、そのゲイン特性に対して、ローパスフィルタ処理してゲインを出力することを特徴とする規範応答演算装置。
【請求項11】
操向輪を転舵する転舵部に転舵トルクを出力する転舵アクチュエータと、
ハンドル角またはハンドルトルクに応じた入力信号を出力するハンドル操作計測手段と、
前記入力信号に応じた車両挙動の規範応答を演算する規範応答演算手段と、
前記規範応答に基づいて前記転舵アクチュエータを制御する転舵制御手段と、
を備えた車両用操舵装置において、
前記規範応答演算手段として、請求項1ないし請求項10のいずれか1項に記載の規範応答演算装置を用いたことを特徴とする車両用操舵装置。
【請求項1】
入力信号に応じた制御対象の規範応答を演算する規範応答演算装置であって、
前記入力信号に基づいて前記規範応答のベース値を演算する規範応答ベース値演算部と、
前記入力信号を微分した微分入力信号を出力する微分器と、
前記微分入力信号に基づいてゲインを演算するゲイン演算部と、
前記規範応答ベース値に前記ゲインを乗算して前記規範応答を演算する乗算器と、
を備えたことを特徴とする規範応答演算装置。
【請求項2】
請求項1に記載の規範応答演算装置において、
前記規範応答ベース値演算部は、1次遅れのフィルタであることを特徴とする規範応答演算装置。
【請求項3】
請求項1または請求項2に記載の規範応答演算装置において、
前記微分入力信号と前記ゲインとの関係を非線形としたことを特徴とする規範応答演算装置。
【請求項4】
請求項1ないし請求項3のいずれか1項に記載のフィルタにおいて、
前記ゲイン演算部は、前記微分入力信号が大きくなるほど前記ゲインを小さくすることを特徴とする規範応答演算装置。
【請求項5】
請求項1ないし請求項4のいずれか1項に記載の規範応答演算装置において、
前記ゲイン演算部は、前記微分入力信号が第1所定値以下である場合には、前記ゲインを1とすることを特徴とする規範応答演算装置。
【請求項6】
請求項5に記載の規範応答演算装置において、
前記ゲイン演算部は、前記規範応答のゲイン特性を前記ベース値のゲイン特性と一致させたい前記入力信号の周波数の最大値に基づいて前記第1所定値を設定することを特徴とする規範応答演算装置。
【請求項7】
請求項1ないし請求項6のいずれか1項に記載の規範応答演算装置において、
前記ゲイン演算部は、前記ゲインをゼロ以上とすることを特徴とする規範応答演算装置。
【請求項8】
請求項1ないし請求項7のいずれか1項に記載の規範応答演算装置において、
前記ゲイン演算部は、前記微分入力信号が第2所定値以上である場合には、前記ゲインを一定値とすることを特徴とする規範応答演算装置。
【請求項9】
請求項1ないし請求項8のいずれか1項に記載の規範応答演算装置において、
前記ゲイン演算部は、前記微分入力信号の変化に対して前記ゲインを滑らかに変化させることを特徴とする規範応答演算装置。
【請求項10】
請求項1ないし請求項9のいずれか1項に記載の規範応答演算装置において、
前記ゲイン演算部は、前記微分入力信号の変化に応じて前記ゲイン特性を決定し、そのゲイン特性に対して、ローパスフィルタ処理してゲインを出力することを特徴とする規範応答演算装置。
【請求項11】
操向輪を転舵する転舵部に転舵トルクを出力する転舵アクチュエータと、
ハンドル角またはハンドルトルクに応じた入力信号を出力するハンドル操作計測手段と、
前記入力信号に応じた車両挙動の規範応答を演算する規範応答演算手段と、
前記規範応答に基づいて前記転舵アクチュエータを制御する転舵制御手段と、
を備えた車両用操舵装置において、
前記規範応答演算手段として、請求項1ないし請求項10のいずれか1項に記載の規範応答演算装置を用いたことを特徴とする車両用操舵装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2013−52834(P2013−52834A)
【公開日】平成25年3月21日(2013.3.21)
【国際特許分類】
【出願番号】特願2011−194019(P2011−194019)
【出願日】平成23年9月6日(2011.9.6)
【出願人】(000003997)日産自動車株式会社 (16,386)
【出願人】(304023994)国立大学法人山梨大学 (223)
【Fターム(参考)】
【公開日】平成25年3月21日(2013.3.21)
【国際特許分類】
【出願日】平成23年9月6日(2011.9.6)
【出願人】(000003997)日産自動車株式会社 (16,386)
【出願人】(304023994)国立大学法人山梨大学 (223)
【Fターム(参考)】
[ Back to top ]