
視線に沿ってリアルタイムで情報を収集して表示するための装置及びその方法
【課題】人間のオペレータから様々な距離に位置して機械可読の印しによって識別可能な遠隔ターゲットまでの人間のオペレータからの視線に沿ってリアルタイムで情報を収集して表示するための電気光学装置及びその方法を提供する。
【解決手段】人間のオペレータから様々な距離に位置して機械可読の印しによって識別可能な遠隔ターゲットまでの人間のオペレータからの視線に沿ってリアルタイムで情報を収集して表示するための装置及びその方法。2次元画像は、印しに隣接するターゲット上に視線に沿って自動的に投影され、同時に画像の大きさは、拡張された作業距離の範囲に亘って比較的一定に維持される。
【解決手段】人間のオペレータから様々な距離に位置して機械可読の印しによって識別可能な遠隔ターゲットまでの人間のオペレータからの視線に沿ってリアルタイムで情報を収集して表示するための装置及びその方法。2次元画像は、印しに隣接するターゲット上に視線に沿って自動的に投影され、同時に画像の大きさは、拡張された作業距離の範囲に亘って比較的一定に維持される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、一般的に、人間のオペレータから様々な距離に位置して機械可読の印しによって識別可能な遠隔ターゲットまでの人間のオペレータからの視線に沿ってリアルタイムで情報を収集して表示し、より詳細には、視線に沿ってその印しに隣接する各ターゲット上に2次元画像を自動的に表示すると同時に、拡張された距離範囲に亘って画像の大きさを比較的一定に維持するための電気光学装置及びその方法に関する。
【背景技術】
【0002】
ラスターパターンに亘ってレーザ光線を走査するために互いに直交する方向に振動する一対の走査ミラーに基づいてスクリーン上に2次元画像を投影することは、一般的に公知である。しかし、公知の画像投影システムの解像度は、一般的に、640×480ピクセルのビデオグラフィックアレイ(VGA)品質の4分の1未満に制限されている。また、公知の投影システムによって生成された画像は、一般的に、システムから離れてただ1つの距離又は最大でも限られた距離範囲だけで鮮明かつ明瞭である。公知の投影システムの物理的サイズは比較的大きく、消費電力も比較的高く、それによってそれらを小型、バッテリ作動、オペレータ着用可能、手持ち式、又は指支持式の用途に使用することを非現実的にしている。
【0003】
オペレータの手首又はベルト上に着用されたデータ収集ターミナルのスクリーン上に画像を表示することもまた一般的に公知である。キーボード入力により手動で又は1つ又はそれ以上のオペレータの指の裏側に装着された電気光学読取装置により自動で、そのような手首又はベルト着用のターミナルにデータが入力される。読取装置によって捕捉されたデータは、有線又は無線リンクによってターミナルに送られ、捕捉データに対応する情報は、一般的に、液晶ディスプレイ(LCD)装置であるターミナルスクリーン上に表示される。公知の指装着式光学読取装置の例に関して、例えば、米国特許第5,578,810号、第5,410,140号、第5,543,610号、及び米国特許番号D−391,250を参照されたい。
【0004】
しかし、指装着式読取装置に連結された手首又はベルト着用式ターミナルを使用する公知のデータ収集システムは、オペレータが使用中に繰返してその視線を向け直さなければならないその要件のために、全く満足されるものではないことが経験上示されている。通常の作動の下では、オペレータは、配送される包みのようなターゲットに貼られたラベル上に一般的に印刷されたバーコード記号のような印しに対して、最初にその目を視線に沿って向ける。オペレータは、読取装置を記号に向け、走査を開始し、次に、記号が正常に読み取られたという聴覚又は視覚による確認を待つことになる。
【0005】
システムは、次に、読取装置によって収集されたデータを処理し、一般的に処理データに関連する情報をターミナル上に表示する。上述のように人間の手首又はベルト上にターミナルが取り付けられているので、オペレータは、その手首又はベルト上に表示された情報を見るために、その頭を向けるか又は別の視線に沿って少なくともその目の焦点を向け直さなければならない。連続するターゲット上の連続する記号の複数の繰返し走査を実行する時には、人間の目の絶え間のない向け直しは、生産性を低下させて不快感をもたらすものである。
【0006】
従って、本発明の1つの目的は、人間のオペレータから遠隔ターゲットまでの視線に沿って情報をリアルタイムで収集して自動的に表示することである。
本発明の別の目的は、データ収集及び表示中にオペレータがその注視をシフトする必要性を仮に排除できないにしても低減することである。
本発明の更に別の目的は、データ収集及び表示装置の使用中の生産性を改善し、オペレータの不快感を低減することである。
【0007】
【特許文献1】米国特許第5,578,810号
【特許文献2】米国特許第5,410,140号
【特許文献3】米国特許第5,543,610号
【特許文献4】米国特許番号D−391,250
【特許文献5】米国特許出願出願番号第10/387,878号
【発明の開示】
【0008】
上述の目的及び以下で明らかになる他の目的に沿って、本発明の1つの特徴は、簡単には、人間のオペレータから様々な距離に位置する遠隔ターゲットまでの人間のオペレータからの視線に沿ってリアルタイムで情報を収集して表示するための装置及びその方法にある。各ターゲットは、それに関連する機械可読の印しによって識別可能である。例えば、印しは、配送される包みに付着したラベル上に印刷された1次元又は2次元バーコード記号とすることができる。記号は、包みを識別し、オペレータは、包みを集荷して配達し、並びに配送中に包みを追跡することができるように記号を読んでその符号化データを追跡ネットワークに入力する業務を行う営業配送業者とすることができる。
【0009】
オペレータは、記号を見て、電気光学読取装置を記号に向け、手動で読取装置を作動させることにより記号の読取を開始する。これらの作業中に、読取装置によって放射又は捕捉された光が確実に記号に向けられるか又は記号から反射されるように、オペレータの注視は、直接記号上に向いている。読取装置は、記号から読み取られたデータを処理し、表示するために情報を取り出す。取り出された情報は、ルックアップテーブルから得られた価格、データベースから得られた在庫数、及び、簡単にはデータ収集時にオペレータが知ることが望ましいあらゆる情報とすることができる。
【0010】
読取装置又は少なくともその主要な構成要素は、オペレータによって支持される携帯用ハウジングに収納される。例えば、ハウジングは、1つ又はそれ以上のオペレータの指の裏側にハウジングを支持するためのリングマウントを含むことができる。
ハウジングには、画像投影装置も収容することができる。投影装置は、光源、例えばレーザ光線を放射するための半導体レーザと、各々が多くのピクセルを有する走査線のパターンでターゲット上に光線を走査するためのスキャナと、読取装置によって得られたデータに基づいてパターン内の選択されたピクセルを選択し、選択されたピクセルをレーザ光線により照射して可視にし、それによってターゲット上の記号に隣接してターゲット上に2次元画像を生成するためのコントローラとを含む。
【0011】
本発明の一態様によれば、ターゲット上への画像の投影は、記号読取の後で自動的に行われ、画像を見るために、オペレータはその注視をそらす必要がない。データ収集及び表示中に、オペレータは、その頭又は目を移動するか又は常にターゲットに向いているその視点を変える必要性が全くない。この特徴は、生産性とオペレータの快適性を改善するものである。
本発明の更に別の特徴は、ターゲットとハウジングの間で拡張された距離範囲に亘って画像の大きさを制御することにある。すなわち、ターゲットは、オペレータに支持されたハウジングから離して数インチ又はかなりのフィートにすることができる。投影装置からの距離の増加に応じて投影画像の面積は増大し、逆もまた同様である。一部のケースでは、画像は、接近したターゲットに対して小さすぎることがあり、又は遠く離れたターゲットに対して大きすぎることもある。オペレータは、一般的に、より扱い易くて容易に見られる画像を取得するために、ターゲットの方向に又はそれから離してその手を移動する。
【0012】
本発明は、ターゲットの距離を判断し、判断された距離に基づいて画像の大きさを制御するための距離計を提供する。好ましくは、画像の大きさは、目標が位置することができる拡張された距離範囲に亘って比較的一定に維持される。一定の画像の大きさは、オペレータに対して定まった視覚体験をもたらし、時間と共にオペレータの疲労をもたらす上述の手の動きを回避する。距離計は、ハウジング上に取り付けることができる。また、読み取られている印しの大きさの事前知識を得て、距離を判断するためにその情報を使用することも可能である。
【発明を実施するための最良の形態】
【0013】
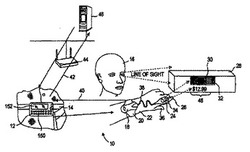
参照数字10は、本発明によるデータ収集及び表示システムを全体的に特定している。システム10は、オペレータ16のベルト14上に装着された移動ターミナル12、オペレータ16の手首22の周りに着用されたリストストラップ20を含む手首着用式周辺装置18、及びオペレータ16の人差し指26に取り付けられた指装着式ハウジング24を含む。
以下に詳細に説明するように、オペレータ16は、視線に沿ってその目を向け、差し出されたその人差し指26を指し、ハウジング24をターゲット28、例えば、カートン28に付着したラベル32上に印し、例えば2次元バーコード記号30が印刷された発送用カートンに向ける。次に、オペレータは、その親指36を使って手動でトリガ34を押し込むことにより、ハウジング24に取り付けられた電気光学読取装置を手動で作動する。読取装置は、記号を読み込んで処理し、ケーブル38を使用して処理された情報を周辺装置18に送る。周辺装置18は、次に、例えば、「Bluetooth」のような短距離プロトコルを使用して、無線リンク40により処理された情報をターミナル12に送る。ターミナル12は、次に、受信した情報を別の無線リンク42上で「IEEE 802.11」プロトコルを通じて無線ルータ44に転送する。ルータ44は、次に、有線接続サーバ46に情報を転送し、このサーバは、データベース又はルックアップテーブルにアクセスし、オペレータに表示するためにそこから情報を取り出す。サーバ46は、この取り出された情報をルータ44、ターミナル12,周辺装置18、及び指装着式ハウジング24内の画像投影装置に送る。画像投影装置は、以下に詳細に説明するように、2次元画像48、例えば価格「12.99ドル」を記号30に隣接するカートン28上に投影する。この画像48は、画像を読み取るために頭の向きを変えたり又はその注視又は視線を変えなくてもオペレータには可視である。オペレータの注意は常にカートンにあり、それによってオペレータの生産性と快適性を改善する。
【0014】
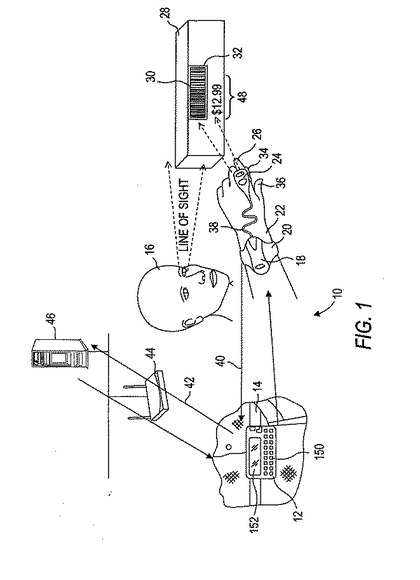
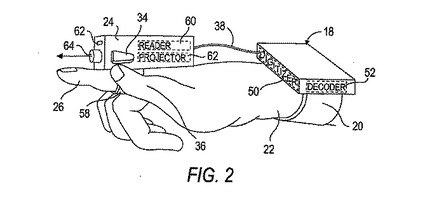
図2は、差し出された指26上のハウジング24を示している。電気光学読取装置60及び画像投影装置62、又は少なくともそれらの主要構成要素は、ハウジング内に取り付けられる。図4は、読取装置60の回路構成要素を示している。図5は、投影装置62の回路構成要素を示している。以下に説明するように、読取装置は、記号から受け取られた光の変動する輝度を示すアナログ信号を発生する。このアナログ信号は、デジタイザー50によってデジタル化され、次に、復号器52によって復号化される。図2では、アナログ信号は、デジタイザー50と復号器52が収容された周辺装置18までケーブル38によって導かれる。図3では、デジタイザー50と復号器52がハウジング24内に収容されているので、ケーブル38と周辺装置18は除かれている。ターミナル12内の対応するトランシーバ56と通信するために、ハウジング24内の無線トランシーバ54が使用される。図2及び3は、両方ともハウジングをオペレータの指に取り付けるためのリングマウント58を示している。ハウジング24は、一対の光透過性ウインドウ62及び64を含み、一方は読取装置用で他方は投影装置用であるが、以下に説明するように、両方のウインドウ62及び64を1つのウインドウに組み込むことが可能である。
【0015】
図4及び5のブロック図を参照する前に、システム10の多くの変形が可能であることを説明する必要がある。先に説明したように、ケーブル38と周辺装置18は排除することができると考えられる。ハウジング24自体も指に装着される必要はなく、ペン、ガン、懐中電灯、又は情報携帯端末のように手に保持することができ、又はオペレータの身体の別の部分に支持することができ、又は、例えば眼鏡又はヘルメットに組み込んで衣服又は身体に着用することができるであろう。ターミナル、ルータ、及びサーバ間の有線又は無線リンクは、変更することが可能であり、実際に、一部の用途では、1以上のこれらの機器を除外することができると考えられる。
【0016】
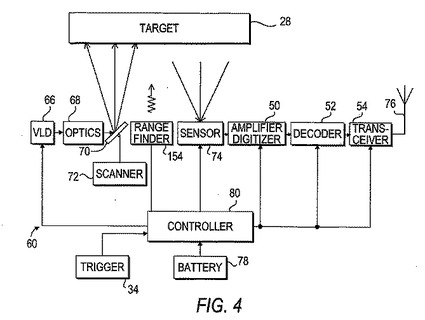
ここで図4を参照すると、読取装置60は、ターゲット28上の印し30上及びそれを横切ってウインドウ62を通してレーザ光線を走査するためにスキャナ72によって振動可能な走査ミラー70まで集束光学機器68を通じてレーザ光線を向けるように作動する半導体可視レーザダイオード66のような光源を含む。図示の装置は、UPC記号のような1次元記号を読み取るために適する、記号を横切って一方向に延びる単一の走査線を生成する。第2の走査ミラーとスキャナを使用して、上述の一方向に直交する第2の方向に沿って配列された走査線のパターンを生成することができ、このパターンは、2次元記号を読み取るのに適するものである。
【0017】
記号から反射した光は、記号から反射した光の検出された輝度を示す電気アナログ信号を発生するように作動するセンサ74、例えばフォトダイオードによって検出される。上述のように、このアナログ信号は、デジタイザー50でデジタル化され、復号器52で復号化され、トランシーバ54によってアンテナ76に送られ、全てがコントローラ80、例えばプログラムされたマイクロプロセッサの制御の下で行われる。ハウジング24内の全ての電子構成要素に電力を供給するために、バッテリ78の好ましくは充電可能なものが使用される。トリガ34は、コントローラ80に接続される。
【0018】
読取装置60は、従って、ターゲット又はその何らかの特性を識別する復号化された信号を発生する。システムは、データベース又はルックアップテーブルにアクセスするためにこの識別信号を使用し、識別信号に対応する何らかの情報を取り出す。これは、出荷価格、又は在庫商品の量などとすることができるであろう。この取り出された情報は、取り出された情報を表示するためにシステムによって投影装置62まで送り戻される。
【0019】
図5を参照する前に、読取装置は、光線読取装置を移動するのに使用されるようなレーザ66とフォトダイオード74を使用する必要はないが、記号を撮像して次に画像の解析に基づいて記号を復号化するのに電荷結合素子(CCD)アレイ又は同様の2次元アレイが使用される撮像装置とすることができることに言及しておく必要がある。
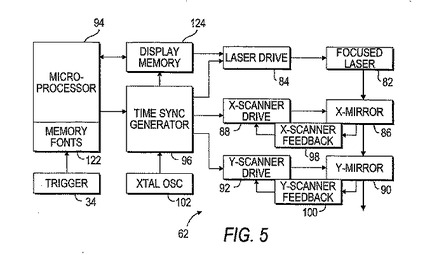
図5の画像投影装置62は、駆動装置84によって駆動されるレーザ82のような光源を含み、この光源は、一般的に「X軸」走査と呼ばれる第1の方向に沿った第1の走査周波数fhで前後に水平方向にレーザ光線を移動させるためのX駆動装置88によって振動可能な第1のXミラー86に対してレーザ光線を放射し、次に、一般的に「Y軸」走査と呼ばれる第2の方向に沿った第2の走査周波数fvで上下に垂直方向にレーザ光線を移動させるためのY駆動装置92によって振動可能な第2のYミラー90に対してレーザ光線を放射する。第1及び第2の方向は互いに直交する。第1又は水平方向の走査周波数は、第2又は垂直方向の走査周波数よりも一般的に遥かに高速である。好ましい実施形態では、fv≧40Hz及びfh≧3.8kHz又はn(fv)であり、nは、1回の水平走査内のピクセル数である。
【0020】
制御プロセッサ94は、時間同期発生器96を制御するように作動し、これは、次に、Xミラー86とYミラー90が適正な速度で振動することを保証するためにX駆動装置88とY駆動装置92を制御する。Xスキャナフィードバック回路98とYスキャナフィードバック回路100は、ミラー86及び90の走査周波数と走査角度をモニタし、駆動装置88及び92が定格速度及び走査角度を維持するのを助ける。水晶発振器102は、マスタークロックとして働くものである。更に、フィードバック回路98及び100は、スクリーンに亘って均一な光度が得られるように、レーザスポットがスクリーンを横切る時のその光度を制御するために使用することができる。時間同期発生器96はまた、レーザ駆動装置84を制御して、レーザ82がレーザ光線を放射するために何時駆動されるかを制御する。
読取と画像投影のために同じレーザ66及び82を使用することができる。ミラー70及び86とそれらの駆動装置は共有することもできる。Yミラー90は、2軸読み取りが望ましい時だけ共有される。コントローラ80及び94は共有される。
【0021】
図6は、ここでもまた読取装置60と投影装置62を収容し、ハウジングをより小型軽量化するためにできるだけ多くの上述の構成要素を共有する修正された指装着式ハウジング110を示している。読取及び画像投影の両方のための単一ウインドウ112が示されている。ストラップ114は、オペレータの1以上の指に合わせてハウジングの大きさを変えることを可能にする。以下に説明する異なる作動モードを開始するために、一対のトリガ116及び118が設けられている。
【0022】
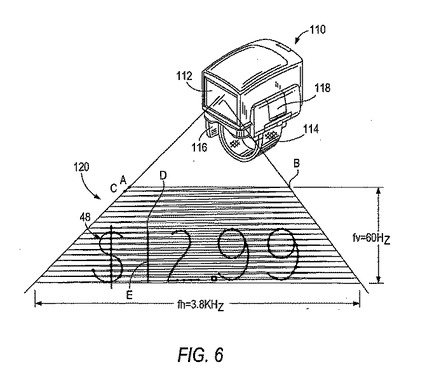
投影装置は、図6の参照番号120によって特定される「ラスター」として公知の結果的に得られる光パターンを生成する。レーザ82からの集束光のスポットは、ポイントAから開始してポイントBまでX方向に沿って水平周波数で駆動装置88によって走査され、第1の走査線を形成する。それに引き続いて、駆動装置92は、Y方向に沿って垂直周波数でポイントBからスポットを走査し、第2の走査線を形成する。連続する走査線の形成が同じようにして進行する。好ましい実施形態では、ウインドウ112から約5インチの距離で4平方インチ程度(例えば、2.25インチ×1.75インチ)と測定される表示区域に対して、ラスタの解像度は、高さ(Y方向)に沿って約120線又はピクセルであり、幅(X方向)に沿って約64ピクセルである。
【0023】
画像48は、プロセッサ94と次にレーザ駆動装置84を制御する発生器96との制御の下で、選択された時間にレーザ82をオンオフにパルス駆動することにより、ラスターパターン120に作成される。レーザ82は、可視光線を生成し、所望する画像のピクセルを見ることが望ましい時だけオンにされる。例えば、図6の画像ワード「12.99ドル」の数字「1」は、走査線のピクセルDでレーザをオンにし、再度別の走査線のピクセルEでレーザをオンにし、数字「1」の垂直な脚が形成されるまで以下同様にすることによって形成される。
【0024】
この技術によって全ての文字又は数字を形成することができる。実際に、グラフィック意匠及びロゴ、及びバーコード記号さえも含むあらゆる画像は、X及びY軸に沿って配列された複数のそのような照光ピクセルから形成することができる。プロセッサ94によってアクセスするために、メモリ124内のフォントファイル122にフォントを保存することができる。
視覚的な容易さを可能にするためのほぼ4対1のコントラスト比を達成するために、画像区域は、ほぼ4から8平方インチである。画像区域がより大きくなると、表示の明るさとコントラスト比が維持されるとすれば、「CDRH−II」安全レベルを超えるためにより大きなレーザパワーが必要になるであろう。反対に、レーザパワーが一定に保たれる場合、表示区域が増加すると、明るさとコントラスト比は減少する。
【0025】
表示区域は、ミラー86及び90の走査角度を変えるか、走査ミラーに対する作動電力を変えるか、又は駆動周波数を僅かに変えることにより動的に変えることができる。画像高さは、ちらつきを低減するために最低40Hzで走査される。Xミラー86は、捩れバンドに取り付けられた平坦ミラーが好ましい。ミラーの回転中心は、可聴ノイズを最小にするために回転軸に対して対称である。表示区域は矩形が好ましい。
レーザパワーは、好ましくは、均一な可視性の表示を維持するために走査速度に伴って変動する。レーザパワーとピクセル持続時間との積は、表示に亘って一定に保たれるべきである。走査線中の各スポットのオンオフ持続時間は、線解像度を「無限大」と考えることができるように変えることができる。
アセンブリは、約0.5立方インチの容積に適合することができ、従って、ペン、リング、キーチェーン、ペンダント、又は形状係数の小さな他のいずれかの装置として構成されたハウジングに適合することができる。好ましくは、アセンブリの構成要素は、プリント回路基板のような共通の支持体上に取り付けられ、矩形で平行六面体形状の小型モジュール130を構成する。
【0026】
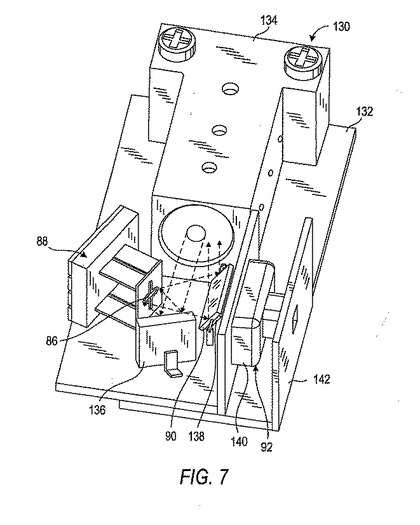
図7を参照すると、モジュール130は、支持体132、例えばプリント回路基板と、レーザ82(図5参照)及びレーザによって放射されたレーザ光線を光学的に変更するように作動する光学機器が取り付けられたレーザ/光学機器ケーシング134とを含む。
ケーシング134から出て行くレーザ光線は、固定された反射ミラー136に向けられ、かつそこから反射される。スキャナも基板132に取り付けられ、第1の水平走査角度に亘って反射ミラーから反射したレーザ光線を走査するために第1の走査速度で慣性駆動装置88により振動可能な第1の走査ミラー86と、第2の垂直走査角度に亘って第1の走査ミラー86から反射したレーザ光線を走査するために第2の走査速度で電磁駆動装置92により振動可能な第2の走査ミラー90とを含む。
【0027】
慣性駆動装置88は、高速で低消費電力の構成要素である。慣性駆動装置の詳細は、本明細書において引用により組み込まれる、本出願と同じ出願人に譲渡された2003年3月13出願の米国特許出願出願番号第10/387,878号に見出すことができる。
電磁駆動装置92は、第2の走査ミラー90上及びその背後に接合的に取り付けられた永久磁石138と、周期的駆動信号の受信に応答して周期的な磁界を発生するように作動する電磁コイル140とを含む。コイル140は、周期的磁界が磁石138の永久磁界と磁気的に相互作用して磁石と次に第2の走査ミラー90とを振動させるように、磁石138に隣接している。コイル140は、基板132に結合した直立壁142によって支持される。
【0028】
慣性駆動装置88は、好ましくは5kHzを超える走査速度、より詳細には18kHz又はそれ以上程度の高速で走査ミラー86を振動させる。この高い走査速度は、非可聴周波数であり、従ってノイズと振動を最小にする。電磁駆動装置92は、走査ミラー90を40Hz程度のより低い走査速度で振動させ、これは、過度のちらつきなしに画像を人間の網膜に持続させるのに十分に高いものである。
より高速のミラー86が水平走査線を走査し、より低速のミラー90が水平走査線を垂直に走査し、それによって、画像が構成されるほぼ平行な走査線のグリッド又はシーケンスであるラスターパターンが作成される。各走査線は、多くのピクセルを有する。画像解像度は、640×480ピクセルのVGA品質が好ましい。一部の用途では、VGA品質の半分の320×480ピクセル、又はVGA品質の4分の1の320×240ピクセルで十分である。
【0029】
画像は、1以上の走査線内のピクセルの選択的な照光によって構成される。上述のように、コントローラ94により、レーザ光線によってラスターパターン内の選択されたピクセルが照光されて可視にされる。例えば、レーザ駆動装置84は、レーザ82に電流を導通してそれを作動させて各選択されたピクセルに光を放射し、レーザ82には電流を導通しないでその作動をオフにして他の非選択ピクセルを非照光にする。照光及び非照光ピクセルの結果として得られるパターンは、人間又は機械可読の情報又はグラフィックのいずれかの表示とすることができる画像48を構成する。レーザ駆動装置84の代わりに音響光学変調器を使用して、照光ピクセルが望ましいラスターパターン内のあらゆるピクセルに対してレーザ光線を偏向させ、又は非照光ピクセルが望ましいあらゆるピクセルから離れるようにレーザ光線を偏向させることができると考えられる。
【0030】
読取を開始して投影ディスプレイの持続時間を制御するために、共有トリガ34を使用することができる。例えば、読取の作動は、最初の押し下げによって行われる。トリガを下げて保持することにより、ボタンが解放されるまで投影が可能になり、その後、次の読取のために再び準備される。トリガを維持することにより、オペレータは、画像48をどの望ましい投影平面にもシフトすることができる。単一のトリガを使用する代わりに、二重トリガ116及び118を一方は読取のために他方は画像投影のために独立に作動可能にすることができるであろう。
【0031】
投影されたデータは、内容が比較的限定され、移動ターミナル12からプログラム可能なように設計される。例えば、オペレータは、ベルト14からアンテナ12を取り外すことができ、小さなキーパッド150とディスプレイ152を使用して、オペレータは、価格又は在庫量を投影するオプションを選択することができるであろう。設定された状態で、ターミナルはベルト上に戻して配置される。表示される情報量を制限することにより、それは、複合表面上に投影された時により明瞭になる。代替的に、装置は、オペレータが設定オプションを投影して表示される望ましい情報を選択することができるスイッチング機構を組み込むことができる。
【0032】
更に、画像の大きさは設定可能である。あらゆる形態のデータ収集装置に対して、広範囲の作業域を有し、その近傍内か又はそれから遠方の記号を読み取ることができることが望ましい。走査角度が一定の場合、装置から投影平面までの距離に応じて、オペレータは異なる大きさの画像を見る。これにより、オペレータは、より扱い易い画像を取得するためにその手を投影平面に対してより遠くに又はより近くに移動させる。そのような補正する手を移動なしで定まった体験をもたらすために、ハウジングに測距機構154を補足し、投影平面からのその距離を測定することができる。測定された距離に基づいて、コントローラは、走査角度を変えて一定の画像サイズを維持する。走査角度を変える代わりに、画像の解像度を犠牲にするが、視野の大きさを変えることができると考えられる。測距機構154は、赤外線又は超音波距離計とすることができる。
【0033】
効率的であるために(小さなサイズ、長いバッテリ寿命)、装置は、消費電力が小さくなるような手段を取るべきである。VGA解像度(640×480ピクセル)にほぼ同等なものと量子化又はプロセッサパッキングに対する8ビット/ピクセルとが与えられると、完全な画像は、300キロバイトを占有する。従来のシステムでは、画像は、外部メモリに転送され、次に、外部メモリからプロセッサによってアクセスされるであろう。外部バス装置は高容量負荷を呈し、CMOSベース電子機器に高レベルの電力を消費させる。本発明の例示的な実施形態は、内蔵DRAMを有するプロセッサを使用することが提案されている。レーザの反射から補足された画像データは、内蔵DRAMに転送され、そこから直接処理されることになる。復号化された画像は、外部メモリに移動されるか又は無線リンクを通じてベルト装着式ターミナルに転送されることになる。
更に、装置は、1次元又は2次元記号のいずれかを読み取るように設定可能であることになる。1次元バーコードに対して設定される時、レーザのラスター化は無効になり、より単純化された復号化アルゴリズムが適用されるが、その両方は、2次元の走査と比較して電力消費を低減するものである。
【0034】
最小限の設定においては、トリガ34は、読取と予め設定された情報の投影とを制御する。より複雑なスイッチ(例えば、作動付きスクロールホイール)の使用か又は一連の時限スイッチトリガを通じて設定を達成することが可能である。例えば、ユーザは、トリガを迅速にダブルクリックして装置を設定モードにすることができる。装置は、最上部のものが強調表示された一組のオプションを投影することができる。1回のクリックでスクロールダウンすることができる。望ましいオプションが見出された状態で、オペレータは、望ましいオプションを作動して作動状態に戻すために、トリガを押し下げて保持することができる。
【0035】
例えば、バーコード記号を読み取る代わりに、ターゲットには、ターゲットに関連する独特な情報で電子的にプログラムされた無線周波数(RF)タグ又はトランスポンダを装備することができ、RF識別システムは、手持ち式装置として構成された読取装置又は質問器を組み込むことができる。読取装置は、一般的に、トランシーバ(復号器付き)と共にパッケージ化されたアンテナ又はコイルを含む。読取装置は、パワー出力と周波数に応じて1インチから100フィート又はそれ以上の範囲の無線波を放射する。タグは、それが無線波の帯域を通過する時に読取装置の作動信号を検出する。読取装置は、タグ内に符号化されたデータを復号化し、復号化されたデータは、処理のためにホストに通される。タグは、能動的又は受動的にすることができる。磁気ストライプ読取装置のような他の種類の読取装置を使用することもできると考えられる。
新規として請求し、かつ米国特許証により保護されるように望むものは、特許請求の範囲に示されている。
【図面の簡単な説明】
【0036】
【図1】本発明によるデータ収集及び表示システムの斜視図である。
【図2】図1のシステムで使用するための指装着式ハウジングの一実施形態の斜視図である。
【図3】図1のシステムで使用するための指装着式ハウジングの別の実施形態の斜視図である。
【図4】図1のシステムで使用するための読取装置のブロック図である。
【図5】図1のシステムで使用するための画像投影装置のブロック図である。
【図6】画像投影中の指装着式ハウジングの更に別の実施形態の斜視図である。
【図7】図1のシステムに使用するためのハウジングに設置するために読取装置と投影装置の構成要素が取り付けられたモジュールの斜視図である。
【符号の説明】
【0037】
10 データ収集及び表示システム
12 移動ターミナル
16 オペレータ
18 手首着用式周辺装置
24 指装着式ハウジング
28 ターゲット
30 2次元バーコード記号
34 トリガ
【技術分野】
【0001】
本発明は、一般的に、人間のオペレータから様々な距離に位置して機械可読の印しによって識別可能な遠隔ターゲットまでの人間のオペレータからの視線に沿ってリアルタイムで情報を収集して表示し、より詳細には、視線に沿ってその印しに隣接する各ターゲット上に2次元画像を自動的に表示すると同時に、拡張された距離範囲に亘って画像の大きさを比較的一定に維持するための電気光学装置及びその方法に関する。
【背景技術】
【0002】
ラスターパターンに亘ってレーザ光線を走査するために互いに直交する方向に振動する一対の走査ミラーに基づいてスクリーン上に2次元画像を投影することは、一般的に公知である。しかし、公知の画像投影システムの解像度は、一般的に、640×480ピクセルのビデオグラフィックアレイ(VGA)品質の4分の1未満に制限されている。また、公知の投影システムによって生成された画像は、一般的に、システムから離れてただ1つの距離又は最大でも限られた距離範囲だけで鮮明かつ明瞭である。公知の投影システムの物理的サイズは比較的大きく、消費電力も比較的高く、それによってそれらを小型、バッテリ作動、オペレータ着用可能、手持ち式、又は指支持式の用途に使用することを非現実的にしている。
【0003】
オペレータの手首又はベルト上に着用されたデータ収集ターミナルのスクリーン上に画像を表示することもまた一般的に公知である。キーボード入力により手動で又は1つ又はそれ以上のオペレータの指の裏側に装着された電気光学読取装置により自動で、そのような手首又はベルト着用のターミナルにデータが入力される。読取装置によって捕捉されたデータは、有線又は無線リンクによってターミナルに送られ、捕捉データに対応する情報は、一般的に、液晶ディスプレイ(LCD)装置であるターミナルスクリーン上に表示される。公知の指装着式光学読取装置の例に関して、例えば、米国特許第5,578,810号、第5,410,140号、第5,543,610号、及び米国特許番号D−391,250を参照されたい。
【0004】
しかし、指装着式読取装置に連結された手首又はベルト着用式ターミナルを使用する公知のデータ収集システムは、オペレータが使用中に繰返してその視線を向け直さなければならないその要件のために、全く満足されるものではないことが経験上示されている。通常の作動の下では、オペレータは、配送される包みのようなターゲットに貼られたラベル上に一般的に印刷されたバーコード記号のような印しに対して、最初にその目を視線に沿って向ける。オペレータは、読取装置を記号に向け、走査を開始し、次に、記号が正常に読み取られたという聴覚又は視覚による確認を待つことになる。
【0005】
システムは、次に、読取装置によって収集されたデータを処理し、一般的に処理データに関連する情報をターミナル上に表示する。上述のように人間の手首又はベルト上にターミナルが取り付けられているので、オペレータは、その手首又はベルト上に表示された情報を見るために、その頭を向けるか又は別の視線に沿って少なくともその目の焦点を向け直さなければならない。連続するターゲット上の連続する記号の複数の繰返し走査を実行する時には、人間の目の絶え間のない向け直しは、生産性を低下させて不快感をもたらすものである。
【0006】
従って、本発明の1つの目的は、人間のオペレータから遠隔ターゲットまでの視線に沿って情報をリアルタイムで収集して自動的に表示することである。
本発明の別の目的は、データ収集及び表示中にオペレータがその注視をシフトする必要性を仮に排除できないにしても低減することである。
本発明の更に別の目的は、データ収集及び表示装置の使用中の生産性を改善し、オペレータの不快感を低減することである。
【0007】
【特許文献1】米国特許第5,578,810号
【特許文献2】米国特許第5,410,140号
【特許文献3】米国特許第5,543,610号
【特許文献4】米国特許番号D−391,250
【特許文献5】米国特許出願出願番号第10/387,878号
【発明の開示】
【0008】
上述の目的及び以下で明らかになる他の目的に沿って、本発明の1つの特徴は、簡単には、人間のオペレータから様々な距離に位置する遠隔ターゲットまでの人間のオペレータからの視線に沿ってリアルタイムで情報を収集して表示するための装置及びその方法にある。各ターゲットは、それに関連する機械可読の印しによって識別可能である。例えば、印しは、配送される包みに付着したラベル上に印刷された1次元又は2次元バーコード記号とすることができる。記号は、包みを識別し、オペレータは、包みを集荷して配達し、並びに配送中に包みを追跡することができるように記号を読んでその符号化データを追跡ネットワークに入力する業務を行う営業配送業者とすることができる。
【0009】
オペレータは、記号を見て、電気光学読取装置を記号に向け、手動で読取装置を作動させることにより記号の読取を開始する。これらの作業中に、読取装置によって放射又は捕捉された光が確実に記号に向けられるか又は記号から反射されるように、オペレータの注視は、直接記号上に向いている。読取装置は、記号から読み取られたデータを処理し、表示するために情報を取り出す。取り出された情報は、ルックアップテーブルから得られた価格、データベースから得られた在庫数、及び、簡単にはデータ収集時にオペレータが知ることが望ましいあらゆる情報とすることができる。
【0010】
読取装置又は少なくともその主要な構成要素は、オペレータによって支持される携帯用ハウジングに収納される。例えば、ハウジングは、1つ又はそれ以上のオペレータの指の裏側にハウジングを支持するためのリングマウントを含むことができる。
ハウジングには、画像投影装置も収容することができる。投影装置は、光源、例えばレーザ光線を放射するための半導体レーザと、各々が多くのピクセルを有する走査線のパターンでターゲット上に光線を走査するためのスキャナと、読取装置によって得られたデータに基づいてパターン内の選択されたピクセルを選択し、選択されたピクセルをレーザ光線により照射して可視にし、それによってターゲット上の記号に隣接してターゲット上に2次元画像を生成するためのコントローラとを含む。
【0011】
本発明の一態様によれば、ターゲット上への画像の投影は、記号読取の後で自動的に行われ、画像を見るために、オペレータはその注視をそらす必要がない。データ収集及び表示中に、オペレータは、その頭又は目を移動するか又は常にターゲットに向いているその視点を変える必要性が全くない。この特徴は、生産性とオペレータの快適性を改善するものである。
本発明の更に別の特徴は、ターゲットとハウジングの間で拡張された距離範囲に亘って画像の大きさを制御することにある。すなわち、ターゲットは、オペレータに支持されたハウジングから離して数インチ又はかなりのフィートにすることができる。投影装置からの距離の増加に応じて投影画像の面積は増大し、逆もまた同様である。一部のケースでは、画像は、接近したターゲットに対して小さすぎることがあり、又は遠く離れたターゲットに対して大きすぎることもある。オペレータは、一般的に、より扱い易くて容易に見られる画像を取得するために、ターゲットの方向に又はそれから離してその手を移動する。
【0012】
本発明は、ターゲットの距離を判断し、判断された距離に基づいて画像の大きさを制御するための距離計を提供する。好ましくは、画像の大きさは、目標が位置することができる拡張された距離範囲に亘って比較的一定に維持される。一定の画像の大きさは、オペレータに対して定まった視覚体験をもたらし、時間と共にオペレータの疲労をもたらす上述の手の動きを回避する。距離計は、ハウジング上に取り付けることができる。また、読み取られている印しの大きさの事前知識を得て、距離を判断するためにその情報を使用することも可能である。
【発明を実施するための最良の形態】
【0013】
参照数字10は、本発明によるデータ収集及び表示システムを全体的に特定している。システム10は、オペレータ16のベルト14上に装着された移動ターミナル12、オペレータ16の手首22の周りに着用されたリストストラップ20を含む手首着用式周辺装置18、及びオペレータ16の人差し指26に取り付けられた指装着式ハウジング24を含む。
以下に詳細に説明するように、オペレータ16は、視線に沿ってその目を向け、差し出されたその人差し指26を指し、ハウジング24をターゲット28、例えば、カートン28に付着したラベル32上に印し、例えば2次元バーコード記号30が印刷された発送用カートンに向ける。次に、オペレータは、その親指36を使って手動でトリガ34を押し込むことにより、ハウジング24に取り付けられた電気光学読取装置を手動で作動する。読取装置は、記号を読み込んで処理し、ケーブル38を使用して処理された情報を周辺装置18に送る。周辺装置18は、次に、例えば、「Bluetooth」のような短距離プロトコルを使用して、無線リンク40により処理された情報をターミナル12に送る。ターミナル12は、次に、受信した情報を別の無線リンク42上で「IEEE 802.11」プロトコルを通じて無線ルータ44に転送する。ルータ44は、次に、有線接続サーバ46に情報を転送し、このサーバは、データベース又はルックアップテーブルにアクセスし、オペレータに表示するためにそこから情報を取り出す。サーバ46は、この取り出された情報をルータ44、ターミナル12,周辺装置18、及び指装着式ハウジング24内の画像投影装置に送る。画像投影装置は、以下に詳細に説明するように、2次元画像48、例えば価格「12.99ドル」を記号30に隣接するカートン28上に投影する。この画像48は、画像を読み取るために頭の向きを変えたり又はその注視又は視線を変えなくてもオペレータには可視である。オペレータの注意は常にカートンにあり、それによってオペレータの生産性と快適性を改善する。
【0014】
図2は、差し出された指26上のハウジング24を示している。電気光学読取装置60及び画像投影装置62、又は少なくともそれらの主要構成要素は、ハウジング内に取り付けられる。図4は、読取装置60の回路構成要素を示している。図5は、投影装置62の回路構成要素を示している。以下に説明するように、読取装置は、記号から受け取られた光の変動する輝度を示すアナログ信号を発生する。このアナログ信号は、デジタイザー50によってデジタル化され、次に、復号器52によって復号化される。図2では、アナログ信号は、デジタイザー50と復号器52が収容された周辺装置18までケーブル38によって導かれる。図3では、デジタイザー50と復号器52がハウジング24内に収容されているので、ケーブル38と周辺装置18は除かれている。ターミナル12内の対応するトランシーバ56と通信するために、ハウジング24内の無線トランシーバ54が使用される。図2及び3は、両方ともハウジングをオペレータの指に取り付けるためのリングマウント58を示している。ハウジング24は、一対の光透過性ウインドウ62及び64を含み、一方は読取装置用で他方は投影装置用であるが、以下に説明するように、両方のウインドウ62及び64を1つのウインドウに組み込むことが可能である。
【0015】
図4及び5のブロック図を参照する前に、システム10の多くの変形が可能であることを説明する必要がある。先に説明したように、ケーブル38と周辺装置18は排除することができると考えられる。ハウジング24自体も指に装着される必要はなく、ペン、ガン、懐中電灯、又は情報携帯端末のように手に保持することができ、又はオペレータの身体の別の部分に支持することができ、又は、例えば眼鏡又はヘルメットに組み込んで衣服又は身体に着用することができるであろう。ターミナル、ルータ、及びサーバ間の有線又は無線リンクは、変更することが可能であり、実際に、一部の用途では、1以上のこれらの機器を除外することができると考えられる。
【0016】
ここで図4を参照すると、読取装置60は、ターゲット28上の印し30上及びそれを横切ってウインドウ62を通してレーザ光線を走査するためにスキャナ72によって振動可能な走査ミラー70まで集束光学機器68を通じてレーザ光線を向けるように作動する半導体可視レーザダイオード66のような光源を含む。図示の装置は、UPC記号のような1次元記号を読み取るために適する、記号を横切って一方向に延びる単一の走査線を生成する。第2の走査ミラーとスキャナを使用して、上述の一方向に直交する第2の方向に沿って配列された走査線のパターンを生成することができ、このパターンは、2次元記号を読み取るのに適するものである。
【0017】
記号から反射した光は、記号から反射した光の検出された輝度を示す電気アナログ信号を発生するように作動するセンサ74、例えばフォトダイオードによって検出される。上述のように、このアナログ信号は、デジタイザー50でデジタル化され、復号器52で復号化され、トランシーバ54によってアンテナ76に送られ、全てがコントローラ80、例えばプログラムされたマイクロプロセッサの制御の下で行われる。ハウジング24内の全ての電子構成要素に電力を供給するために、バッテリ78の好ましくは充電可能なものが使用される。トリガ34は、コントローラ80に接続される。
【0018】
読取装置60は、従って、ターゲット又はその何らかの特性を識別する復号化された信号を発生する。システムは、データベース又はルックアップテーブルにアクセスするためにこの識別信号を使用し、識別信号に対応する何らかの情報を取り出す。これは、出荷価格、又は在庫商品の量などとすることができるであろう。この取り出された情報は、取り出された情報を表示するためにシステムによって投影装置62まで送り戻される。
【0019】
図5を参照する前に、読取装置は、光線読取装置を移動するのに使用されるようなレーザ66とフォトダイオード74を使用する必要はないが、記号を撮像して次に画像の解析に基づいて記号を復号化するのに電荷結合素子(CCD)アレイ又は同様の2次元アレイが使用される撮像装置とすることができることに言及しておく必要がある。
図5の画像投影装置62は、駆動装置84によって駆動されるレーザ82のような光源を含み、この光源は、一般的に「X軸」走査と呼ばれる第1の方向に沿った第1の走査周波数fhで前後に水平方向にレーザ光線を移動させるためのX駆動装置88によって振動可能な第1のXミラー86に対してレーザ光線を放射し、次に、一般的に「Y軸」走査と呼ばれる第2の方向に沿った第2の走査周波数fvで上下に垂直方向にレーザ光線を移動させるためのY駆動装置92によって振動可能な第2のYミラー90に対してレーザ光線を放射する。第1及び第2の方向は互いに直交する。第1又は水平方向の走査周波数は、第2又は垂直方向の走査周波数よりも一般的に遥かに高速である。好ましい実施形態では、fv≧40Hz及びfh≧3.8kHz又はn(fv)であり、nは、1回の水平走査内のピクセル数である。
【0020】
制御プロセッサ94は、時間同期発生器96を制御するように作動し、これは、次に、Xミラー86とYミラー90が適正な速度で振動することを保証するためにX駆動装置88とY駆動装置92を制御する。Xスキャナフィードバック回路98とYスキャナフィードバック回路100は、ミラー86及び90の走査周波数と走査角度をモニタし、駆動装置88及び92が定格速度及び走査角度を維持するのを助ける。水晶発振器102は、マスタークロックとして働くものである。更に、フィードバック回路98及び100は、スクリーンに亘って均一な光度が得られるように、レーザスポットがスクリーンを横切る時のその光度を制御するために使用することができる。時間同期発生器96はまた、レーザ駆動装置84を制御して、レーザ82がレーザ光線を放射するために何時駆動されるかを制御する。
読取と画像投影のために同じレーザ66及び82を使用することができる。ミラー70及び86とそれらの駆動装置は共有することもできる。Yミラー90は、2軸読み取りが望ましい時だけ共有される。コントローラ80及び94は共有される。
【0021】
図6は、ここでもまた読取装置60と投影装置62を収容し、ハウジングをより小型軽量化するためにできるだけ多くの上述の構成要素を共有する修正された指装着式ハウジング110を示している。読取及び画像投影の両方のための単一ウインドウ112が示されている。ストラップ114は、オペレータの1以上の指に合わせてハウジングの大きさを変えることを可能にする。以下に説明する異なる作動モードを開始するために、一対のトリガ116及び118が設けられている。
【0022】
投影装置は、図6の参照番号120によって特定される「ラスター」として公知の結果的に得られる光パターンを生成する。レーザ82からの集束光のスポットは、ポイントAから開始してポイントBまでX方向に沿って水平周波数で駆動装置88によって走査され、第1の走査線を形成する。それに引き続いて、駆動装置92は、Y方向に沿って垂直周波数でポイントBからスポットを走査し、第2の走査線を形成する。連続する走査線の形成が同じようにして進行する。好ましい実施形態では、ウインドウ112から約5インチの距離で4平方インチ程度(例えば、2.25インチ×1.75インチ)と測定される表示区域に対して、ラスタの解像度は、高さ(Y方向)に沿って約120線又はピクセルであり、幅(X方向)に沿って約64ピクセルである。
【0023】
画像48は、プロセッサ94と次にレーザ駆動装置84を制御する発生器96との制御の下で、選択された時間にレーザ82をオンオフにパルス駆動することにより、ラスターパターン120に作成される。レーザ82は、可視光線を生成し、所望する画像のピクセルを見ることが望ましい時だけオンにされる。例えば、図6の画像ワード「12.99ドル」の数字「1」は、走査線のピクセルDでレーザをオンにし、再度別の走査線のピクセルEでレーザをオンにし、数字「1」の垂直な脚が形成されるまで以下同様にすることによって形成される。
【0024】
この技術によって全ての文字又は数字を形成することができる。実際に、グラフィック意匠及びロゴ、及びバーコード記号さえも含むあらゆる画像は、X及びY軸に沿って配列された複数のそのような照光ピクセルから形成することができる。プロセッサ94によってアクセスするために、メモリ124内のフォントファイル122にフォントを保存することができる。
視覚的な容易さを可能にするためのほぼ4対1のコントラスト比を達成するために、画像区域は、ほぼ4から8平方インチである。画像区域がより大きくなると、表示の明るさとコントラスト比が維持されるとすれば、「CDRH−II」安全レベルを超えるためにより大きなレーザパワーが必要になるであろう。反対に、レーザパワーが一定に保たれる場合、表示区域が増加すると、明るさとコントラスト比は減少する。
【0025】
表示区域は、ミラー86及び90の走査角度を変えるか、走査ミラーに対する作動電力を変えるか、又は駆動周波数を僅かに変えることにより動的に変えることができる。画像高さは、ちらつきを低減するために最低40Hzで走査される。Xミラー86は、捩れバンドに取り付けられた平坦ミラーが好ましい。ミラーの回転中心は、可聴ノイズを最小にするために回転軸に対して対称である。表示区域は矩形が好ましい。
レーザパワーは、好ましくは、均一な可視性の表示を維持するために走査速度に伴って変動する。レーザパワーとピクセル持続時間との積は、表示に亘って一定に保たれるべきである。走査線中の各スポットのオンオフ持続時間は、線解像度を「無限大」と考えることができるように変えることができる。
アセンブリは、約0.5立方インチの容積に適合することができ、従って、ペン、リング、キーチェーン、ペンダント、又は形状係数の小さな他のいずれかの装置として構成されたハウジングに適合することができる。好ましくは、アセンブリの構成要素は、プリント回路基板のような共通の支持体上に取り付けられ、矩形で平行六面体形状の小型モジュール130を構成する。
【0026】
図7を参照すると、モジュール130は、支持体132、例えばプリント回路基板と、レーザ82(図5参照)及びレーザによって放射されたレーザ光線を光学的に変更するように作動する光学機器が取り付けられたレーザ/光学機器ケーシング134とを含む。
ケーシング134から出て行くレーザ光線は、固定された反射ミラー136に向けられ、かつそこから反射される。スキャナも基板132に取り付けられ、第1の水平走査角度に亘って反射ミラーから反射したレーザ光線を走査するために第1の走査速度で慣性駆動装置88により振動可能な第1の走査ミラー86と、第2の垂直走査角度に亘って第1の走査ミラー86から反射したレーザ光線を走査するために第2の走査速度で電磁駆動装置92により振動可能な第2の走査ミラー90とを含む。
【0027】
慣性駆動装置88は、高速で低消費電力の構成要素である。慣性駆動装置の詳細は、本明細書において引用により組み込まれる、本出願と同じ出願人に譲渡された2003年3月13出願の米国特許出願出願番号第10/387,878号に見出すことができる。
電磁駆動装置92は、第2の走査ミラー90上及びその背後に接合的に取り付けられた永久磁石138と、周期的駆動信号の受信に応答して周期的な磁界を発生するように作動する電磁コイル140とを含む。コイル140は、周期的磁界が磁石138の永久磁界と磁気的に相互作用して磁石と次に第2の走査ミラー90とを振動させるように、磁石138に隣接している。コイル140は、基板132に結合した直立壁142によって支持される。
【0028】
慣性駆動装置88は、好ましくは5kHzを超える走査速度、より詳細には18kHz又はそれ以上程度の高速で走査ミラー86を振動させる。この高い走査速度は、非可聴周波数であり、従ってノイズと振動を最小にする。電磁駆動装置92は、走査ミラー90を40Hz程度のより低い走査速度で振動させ、これは、過度のちらつきなしに画像を人間の網膜に持続させるのに十分に高いものである。
より高速のミラー86が水平走査線を走査し、より低速のミラー90が水平走査線を垂直に走査し、それによって、画像が構成されるほぼ平行な走査線のグリッド又はシーケンスであるラスターパターンが作成される。各走査線は、多くのピクセルを有する。画像解像度は、640×480ピクセルのVGA品質が好ましい。一部の用途では、VGA品質の半分の320×480ピクセル、又はVGA品質の4分の1の320×240ピクセルで十分である。
【0029】
画像は、1以上の走査線内のピクセルの選択的な照光によって構成される。上述のように、コントローラ94により、レーザ光線によってラスターパターン内の選択されたピクセルが照光されて可視にされる。例えば、レーザ駆動装置84は、レーザ82に電流を導通してそれを作動させて各選択されたピクセルに光を放射し、レーザ82には電流を導通しないでその作動をオフにして他の非選択ピクセルを非照光にする。照光及び非照光ピクセルの結果として得られるパターンは、人間又は機械可読の情報又はグラフィックのいずれかの表示とすることができる画像48を構成する。レーザ駆動装置84の代わりに音響光学変調器を使用して、照光ピクセルが望ましいラスターパターン内のあらゆるピクセルに対してレーザ光線を偏向させ、又は非照光ピクセルが望ましいあらゆるピクセルから離れるようにレーザ光線を偏向させることができると考えられる。
【0030】
読取を開始して投影ディスプレイの持続時間を制御するために、共有トリガ34を使用することができる。例えば、読取の作動は、最初の押し下げによって行われる。トリガを下げて保持することにより、ボタンが解放されるまで投影が可能になり、その後、次の読取のために再び準備される。トリガを維持することにより、オペレータは、画像48をどの望ましい投影平面にもシフトすることができる。単一のトリガを使用する代わりに、二重トリガ116及び118を一方は読取のために他方は画像投影のために独立に作動可能にすることができるであろう。
【0031】
投影されたデータは、内容が比較的限定され、移動ターミナル12からプログラム可能なように設計される。例えば、オペレータは、ベルト14からアンテナ12を取り外すことができ、小さなキーパッド150とディスプレイ152を使用して、オペレータは、価格又は在庫量を投影するオプションを選択することができるであろう。設定された状態で、ターミナルはベルト上に戻して配置される。表示される情報量を制限することにより、それは、複合表面上に投影された時により明瞭になる。代替的に、装置は、オペレータが設定オプションを投影して表示される望ましい情報を選択することができるスイッチング機構を組み込むことができる。
【0032】
更に、画像の大きさは設定可能である。あらゆる形態のデータ収集装置に対して、広範囲の作業域を有し、その近傍内か又はそれから遠方の記号を読み取ることができることが望ましい。走査角度が一定の場合、装置から投影平面までの距離に応じて、オペレータは異なる大きさの画像を見る。これにより、オペレータは、より扱い易い画像を取得するためにその手を投影平面に対してより遠くに又はより近くに移動させる。そのような補正する手を移動なしで定まった体験をもたらすために、ハウジングに測距機構154を補足し、投影平面からのその距離を測定することができる。測定された距離に基づいて、コントローラは、走査角度を変えて一定の画像サイズを維持する。走査角度を変える代わりに、画像の解像度を犠牲にするが、視野の大きさを変えることができると考えられる。測距機構154は、赤外線又は超音波距離計とすることができる。
【0033】
効率的であるために(小さなサイズ、長いバッテリ寿命)、装置は、消費電力が小さくなるような手段を取るべきである。VGA解像度(640×480ピクセル)にほぼ同等なものと量子化又はプロセッサパッキングに対する8ビット/ピクセルとが与えられると、完全な画像は、300キロバイトを占有する。従来のシステムでは、画像は、外部メモリに転送され、次に、外部メモリからプロセッサによってアクセスされるであろう。外部バス装置は高容量負荷を呈し、CMOSベース電子機器に高レベルの電力を消費させる。本発明の例示的な実施形態は、内蔵DRAMを有するプロセッサを使用することが提案されている。レーザの反射から補足された画像データは、内蔵DRAMに転送され、そこから直接処理されることになる。復号化された画像は、外部メモリに移動されるか又は無線リンクを通じてベルト装着式ターミナルに転送されることになる。
更に、装置は、1次元又は2次元記号のいずれかを読み取るように設定可能であることになる。1次元バーコードに対して設定される時、レーザのラスター化は無効になり、より単純化された復号化アルゴリズムが適用されるが、その両方は、2次元の走査と比較して電力消費を低減するものである。
【0034】
最小限の設定においては、トリガ34は、読取と予め設定された情報の投影とを制御する。より複雑なスイッチ(例えば、作動付きスクロールホイール)の使用か又は一連の時限スイッチトリガを通じて設定を達成することが可能である。例えば、ユーザは、トリガを迅速にダブルクリックして装置を設定モードにすることができる。装置は、最上部のものが強調表示された一組のオプションを投影することができる。1回のクリックでスクロールダウンすることができる。望ましいオプションが見出された状態で、オペレータは、望ましいオプションを作動して作動状態に戻すために、トリガを押し下げて保持することができる。
【0035】
例えば、バーコード記号を読み取る代わりに、ターゲットには、ターゲットに関連する独特な情報で電子的にプログラムされた無線周波数(RF)タグ又はトランスポンダを装備することができ、RF識別システムは、手持ち式装置として構成された読取装置又は質問器を組み込むことができる。読取装置は、一般的に、トランシーバ(復号器付き)と共にパッケージ化されたアンテナ又はコイルを含む。読取装置は、パワー出力と周波数に応じて1インチから100フィート又はそれ以上の範囲の無線波を放射する。タグは、それが無線波の帯域を通過する時に読取装置の作動信号を検出する。読取装置は、タグ内に符号化されたデータを復号化し、復号化されたデータは、処理のためにホストに通される。タグは、能動的又は受動的にすることができる。磁気ストライプ読取装置のような他の種類の読取装置を使用することもできると考えられる。
新規として請求し、かつ米国特許証により保護されるように望むものは、特許請求の範囲に示されている。
【図面の簡単な説明】
【0036】
【図1】本発明によるデータ収集及び表示システムの斜視図である。
【図2】図1のシステムで使用するための指装着式ハウジングの一実施形態の斜視図である。
【図3】図1のシステムで使用するための指装着式ハウジングの別の実施形態の斜視図である。
【図4】図1のシステムで使用するための読取装置のブロック図である。
【図5】図1のシステムで使用するための画像投影装置のブロック図である。
【図6】画像投影中の指装着式ハウジングの更に別の実施形態の斜視図である。
【図7】図1のシステムに使用するためのハウジングに設置するために読取装置と投影装置の構成要素が取り付けられたモジュールの斜視図である。
【符号の説明】
【0037】
10 データ収集及び表示システム
12 移動ターミナル
16 オペレータ
18 手首着用式周辺装置
24 指装着式ハウジング
28 ターゲット
30 2次元バーコード記号
34 トリガ
【特許請求の範囲】
【請求項1】
人間のオペレータから様々な距離に位置し、関連する機械可読の印しによって各々が識別可能な遠隔ターゲットまで、人間のオペレータからの視線に沿ってリアルタイムで情報を収集して自動的に表示するための装置であって、
a)オペレータによってそれぞれのターゲットの印しに向けることができるハウジングと、
b)前記ハウジングによって少なくとも部分的に支持された、前記印しを読み取ってそれに関連する画像データを取得するための読取装置と、
c)前記ハウジングによって少なくとも部分的に支持された投影装置と、
を含み、
前記投影装置は、
i)光線を放射するための光源と、
ii)前記それぞれのターゲット上で、各々が多くのピクセルを有する走査線のパターンで前記光線を走査するためのスキャナと、
iii)前記読取装置によって得られた前記画像データに基づいて前記パターン内の選択されたピクセルを自動的に選択し、該選択されたピクセルを前記光線によって自動的に照光して可視にし、前記オペレータの前記視線に沿って前記それぞれのターゲット上にそれに関連する前記印しに隣接して2次元画像を自動的に生成するためのコントローラと、
を含む、
ことを特徴とする装置。
【請求項2】
前記ハウジングは、前記オペレータの指によって支持されることを特徴とする請求項1に記載の装置。
【請求項3】
前記読取装置は、前記印しからの様々な輝度の光を示すアナログ信号を生成し、前記投影装置によって表示するための画像データを取得するために前記アナログ信号を処理するプロセッサを含むことを特徴とする請求項1に記載の装置。
【請求項4】
前記光源は、半導体レーザであることを特徴とする請求項1に記載の装置。
【請求項5】
前記スキャナは、第1の走査速度で第1の走査角度に亘って第1の方向に沿って前記光線を走査するための第1の振動可能な走査ミラーと、該第1の走査速度とは異なる第2の走査速度で該第1の走査角度とは異なる第2の走査角度に亘って該第1の方向と実質的に直交する第2の方向に沿って該光線を走査するための第2の振動可能な走査ミラーとを含むことを特徴とする請求項1に記載の装置。
【請求項6】
前記走査速度の少なくとも一方は、ノイズを最小にするために可聴周波数を超えるものであることを特徴とする請求項5に記載の装置。
【請求項7】
前記コントローラは、前記選択されたピクセルを照光するために前記光源に電力供給し、該選択されたピクセル以外のピクセルを照光しないように該光源に電力供給しない手段を含むことを特徴とする請求項1に記載の装置。
【請求項8】
人間のオペレータから様々な距離に位置し、関連する機械可読の印しによって各々が識別可能な遠隔ターゲットまで、人間のオペレータからの視線に沿ってリアルタイムで情報を収集して表示するための装置であって、
a)オペレータの指に取り付けられ、該オペレータの差し出された指によりそれぞれのターゲットの印しに向けることができるハウジングと、
b)前記ハウジングによって少なくとも部分的に支持された、前記印しを読み取ってそれに関連する画像データを取得するための読取装置と、
c)前記ハウジングによって少なくとも部分的に支持された投影装置と、
を含み、
前記投影装置は、
i)光線を放射するための光源と、
ii)前記それぞれのターゲット上で、各々が多くのピクセルを有する走査線のパターンで前記光線を走査するためのスキャナと、
iii)前記読取装置によって得られた前記画像データに基づいて前記パターン内の選択されたピクセルを選択し、該選択されたピクセルを前記光線によって照光して可視にし、前記オペレータの前記視線に沿って前記それぞれのターゲット上にそれに関連する前記印しに隣接して2次元画像を自動的に生成するためのコントローラと、
を含む、
ことを特徴とする装置。
【請求項9】
人間のオペレータから様々な距離に位置し、関連する機械可読の印しによって各々が識別可能な遠隔ターゲットまで、人間のオペレータからの視線に沿ってリアルタイムで情報を収集して表示するための装置であって、
a)オペレータによりそれぞれのターゲットの印しに向けることができるハウジングと、
b)前記ハウジングによって少なくとも部分的に支持された、前記印しを読み取ってそれに関連する画像データを取得するための読取装置と、
c)前記ハウジングによって少なくとも部分的に支持された投影装置と、
を含み、
前記投影装置は、
i)光線を放射するための光源と、
ii)前記それぞれのターゲット上で、各々が多くのピクセルを有する走査線のパターンで前記光線を走査するためのスキャナと、
iii)前記読取装置によって得られた前記画像データに基づいて前記パターン内の選択されたピクセルを選択し、該選択されたピクセルを前記光線によって照光して可視にし、前記オペレータの前記視線に沿って前記それぞれのターゲット上にそれに関連する前記印しに隣接して、互いに直交する方向に亘って延びる大きさを有する2次元画像を生成するためのコントローラと、
を含み、
d)前記ハウジングからの前記それぞれのターゲットの距離を判断し、判断した該距離に基づいて前記画像の大きさを制御するために前記コントローラに作動的に結合された距離計、
を更に含むことを特徴とする装置。
【請求項10】
人間のオペレータから様々な距離に位置し、関連する機械可読の印しによって各々が識別可能な遠隔ターゲットまで、人間のオペレータからの視線に沿ってリアルタイムで情報を収集して自動的に表示する方法であって、
a)オペレータによりハウジングをそれぞれのターゲットの印しに向ける段階と、
b)前記ハウジングにより少なくとも部分的に支持された読取装置を作動させることによって前記印しを読み取り、それに関連する画像データを取得する段階と、
c)前記ハウジングによって少なくとも部分的に支持された投影装置を作動させることにより、前記オペレータの視線に沿って前記それぞれのターゲット上にそれに関連する前記印しに隣接して2次元画像を自動的に生成する段階と、
を含み、
前記自動的に生成する段階は、
i)光線を放射する段階と、
ii)前記それぞれのターゲット上に、各々が多くのピクセルを有する走査線のパターンで前記光線を走査する段階と、
iii)前記読取装置によって得られた前記画像データに基づいて前記パターン内の選択されたピクセルを自動的に選択し、該選択されたピクセルを前記光線により自動的に照光して可視にする段階と、
を含む、
ことを特徴とする方法。
【請求項11】
前記ハウジングを前記オペレータの指で支持する段階を含むことを特徴とする請求項10に記載の方法。
【請求項12】
前記読取装置は、前記印しからの様々な輝度の光を示すアナログ信号を発生し、
前記投影装置によって表示するための画像データを取得するために前記アナログ信号を処理する段階、
を含むことを特徴とする請求項10に記載の方法。
【請求項13】
前記光源は、半導体レーザであることを特徴とする請求項10に記載の方法。
【請求項14】
前記スキャナは、第1の走査速度で第1の走査角度に亘って第1の方向に沿って前記光線を走査するための第1の振動可能な走査ミラーと、該第1の走査速度とは異なる第2の走査速度及び該第1の走査角度とは異なる第2の走査角度で該第1の方向と実質的に直交する第2の方向に沿って該光線を走査するための第2の振動可能な走査ミラーとを含むことを特徴とする請求項10に記載の方法。
【請求項15】
前記走査速度の少なくとも一方は、ノイズを最小にするために可聴周波数を超えるものであることを特徴とする請求項14に記載の方法。
【請求項16】
前記選択されたピクセルを照光するために前記光源に電力供給する段階と、該選択されたピクセル以外のピクセルを照光しないように該光源に電力供給しない段階とを含むことを特徴とする請求項10に記載の方法。
【請求項17】
前記ハウジングからの前記それぞれのターゲットの距離を判断する段階と、該判断された距離に基づいて前記画像の大きさを制御する段階とを含むことを特徴とする請求項10に記載の方法。
【請求項1】
人間のオペレータから様々な距離に位置し、関連する機械可読の印しによって各々が識別可能な遠隔ターゲットまで、人間のオペレータからの視線に沿ってリアルタイムで情報を収集して自動的に表示するための装置であって、
a)オペレータによってそれぞれのターゲットの印しに向けることができるハウジングと、
b)前記ハウジングによって少なくとも部分的に支持された、前記印しを読み取ってそれに関連する画像データを取得するための読取装置と、
c)前記ハウジングによって少なくとも部分的に支持された投影装置と、
を含み、
前記投影装置は、
i)光線を放射するための光源と、
ii)前記それぞれのターゲット上で、各々が多くのピクセルを有する走査線のパターンで前記光線を走査するためのスキャナと、
iii)前記読取装置によって得られた前記画像データに基づいて前記パターン内の選択されたピクセルを自動的に選択し、該選択されたピクセルを前記光線によって自動的に照光して可視にし、前記オペレータの前記視線に沿って前記それぞれのターゲット上にそれに関連する前記印しに隣接して2次元画像を自動的に生成するためのコントローラと、
を含む、
ことを特徴とする装置。
【請求項2】
前記ハウジングは、前記オペレータの指によって支持されることを特徴とする請求項1に記載の装置。
【請求項3】
前記読取装置は、前記印しからの様々な輝度の光を示すアナログ信号を生成し、前記投影装置によって表示するための画像データを取得するために前記アナログ信号を処理するプロセッサを含むことを特徴とする請求項1に記載の装置。
【請求項4】
前記光源は、半導体レーザであることを特徴とする請求項1に記載の装置。
【請求項5】
前記スキャナは、第1の走査速度で第1の走査角度に亘って第1の方向に沿って前記光線を走査するための第1の振動可能な走査ミラーと、該第1の走査速度とは異なる第2の走査速度で該第1の走査角度とは異なる第2の走査角度に亘って該第1の方向と実質的に直交する第2の方向に沿って該光線を走査するための第2の振動可能な走査ミラーとを含むことを特徴とする請求項1に記載の装置。
【請求項6】
前記走査速度の少なくとも一方は、ノイズを最小にするために可聴周波数を超えるものであることを特徴とする請求項5に記載の装置。
【請求項7】
前記コントローラは、前記選択されたピクセルを照光するために前記光源に電力供給し、該選択されたピクセル以外のピクセルを照光しないように該光源に電力供給しない手段を含むことを特徴とする請求項1に記載の装置。
【請求項8】
人間のオペレータから様々な距離に位置し、関連する機械可読の印しによって各々が識別可能な遠隔ターゲットまで、人間のオペレータからの視線に沿ってリアルタイムで情報を収集して表示するための装置であって、
a)オペレータの指に取り付けられ、該オペレータの差し出された指によりそれぞれのターゲットの印しに向けることができるハウジングと、
b)前記ハウジングによって少なくとも部分的に支持された、前記印しを読み取ってそれに関連する画像データを取得するための読取装置と、
c)前記ハウジングによって少なくとも部分的に支持された投影装置と、
を含み、
前記投影装置は、
i)光線を放射するための光源と、
ii)前記それぞれのターゲット上で、各々が多くのピクセルを有する走査線のパターンで前記光線を走査するためのスキャナと、
iii)前記読取装置によって得られた前記画像データに基づいて前記パターン内の選択されたピクセルを選択し、該選択されたピクセルを前記光線によって照光して可視にし、前記オペレータの前記視線に沿って前記それぞれのターゲット上にそれに関連する前記印しに隣接して2次元画像を自動的に生成するためのコントローラと、
を含む、
ことを特徴とする装置。
【請求項9】
人間のオペレータから様々な距離に位置し、関連する機械可読の印しによって各々が識別可能な遠隔ターゲットまで、人間のオペレータからの視線に沿ってリアルタイムで情報を収集して表示するための装置であって、
a)オペレータによりそれぞれのターゲットの印しに向けることができるハウジングと、
b)前記ハウジングによって少なくとも部分的に支持された、前記印しを読み取ってそれに関連する画像データを取得するための読取装置と、
c)前記ハウジングによって少なくとも部分的に支持された投影装置と、
を含み、
前記投影装置は、
i)光線を放射するための光源と、
ii)前記それぞれのターゲット上で、各々が多くのピクセルを有する走査線のパターンで前記光線を走査するためのスキャナと、
iii)前記読取装置によって得られた前記画像データに基づいて前記パターン内の選択されたピクセルを選択し、該選択されたピクセルを前記光線によって照光して可視にし、前記オペレータの前記視線に沿って前記それぞれのターゲット上にそれに関連する前記印しに隣接して、互いに直交する方向に亘って延びる大きさを有する2次元画像を生成するためのコントローラと、
を含み、
d)前記ハウジングからの前記それぞれのターゲットの距離を判断し、判断した該距離に基づいて前記画像の大きさを制御するために前記コントローラに作動的に結合された距離計、
を更に含むことを特徴とする装置。
【請求項10】
人間のオペレータから様々な距離に位置し、関連する機械可読の印しによって各々が識別可能な遠隔ターゲットまで、人間のオペレータからの視線に沿ってリアルタイムで情報を収集して自動的に表示する方法であって、
a)オペレータによりハウジングをそれぞれのターゲットの印しに向ける段階と、
b)前記ハウジングにより少なくとも部分的に支持された読取装置を作動させることによって前記印しを読み取り、それに関連する画像データを取得する段階と、
c)前記ハウジングによって少なくとも部分的に支持された投影装置を作動させることにより、前記オペレータの視線に沿って前記それぞれのターゲット上にそれに関連する前記印しに隣接して2次元画像を自動的に生成する段階と、
を含み、
前記自動的に生成する段階は、
i)光線を放射する段階と、
ii)前記それぞれのターゲット上に、各々が多くのピクセルを有する走査線のパターンで前記光線を走査する段階と、
iii)前記読取装置によって得られた前記画像データに基づいて前記パターン内の選択されたピクセルを自動的に選択し、該選択されたピクセルを前記光線により自動的に照光して可視にする段階と、
を含む、
ことを特徴とする方法。
【請求項11】
前記ハウジングを前記オペレータの指で支持する段階を含むことを特徴とする請求項10に記載の方法。
【請求項12】
前記読取装置は、前記印しからの様々な輝度の光を示すアナログ信号を発生し、
前記投影装置によって表示するための画像データを取得するために前記アナログ信号を処理する段階、
を含むことを特徴とする請求項10に記載の方法。
【請求項13】
前記光源は、半導体レーザであることを特徴とする請求項10に記載の方法。
【請求項14】
前記スキャナは、第1の走査速度で第1の走査角度に亘って第1の方向に沿って前記光線を走査するための第1の振動可能な走査ミラーと、該第1の走査速度とは異なる第2の走査速度及び該第1の走査角度とは異なる第2の走査角度で該第1の方向と実質的に直交する第2の方向に沿って該光線を走査するための第2の振動可能な走査ミラーとを含むことを特徴とする請求項10に記載の方法。
【請求項15】
前記走査速度の少なくとも一方は、ノイズを最小にするために可聴周波数を超えるものであることを特徴とする請求項14に記載の方法。
【請求項16】
前記選択されたピクセルを照光するために前記光源に電力供給する段階と、該選択されたピクセル以外のピクセルを照光しないように該光源に電力供給しない段階とを含むことを特徴とする請求項10に記載の方法。
【請求項17】
前記ハウジングからの前記それぞれのターゲットの距離を判断する段階と、該判断された距離に基づいて前記画像の大きさを制御する段階とを含むことを特徴とする請求項10に記載の方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公表番号】特表2007−525694(P2007−525694A)
【公表日】平成19年9月6日(2007.9.6)
【国際特許分類】
【出願番号】特願2006−514218(P2006−514218)
【出願日】平成16年4月29日(2004.4.29)
【国際出願番号】PCT/US2004/013618
【国際公開番号】WO2004/099828
【国際公開日】平成16年11月18日(2004.11.18)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.Bluetooth
【出願人】(599101597)シンボル テクノロジーズ インコーポレイテッド (68)
【Fターム(参考)】
【公表日】平成19年9月6日(2007.9.6)
【国際特許分類】
【出願日】平成16年4月29日(2004.4.29)
【国際出願番号】PCT/US2004/013618
【国際公開番号】WO2004/099828
【国際公開日】平成16年11月18日(2004.11.18)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.Bluetooth
【出願人】(599101597)シンボル テクノロジーズ インコーポレイテッド (68)
【Fターム(参考)】
[ Back to top ]