
視覚ステークアウト

【課題】全地球ナビゲーション衛星システムを提供する。
【解決手段】ライブ画像において関心の地点をマーク付けるためのコンピュータ実装方法であって、方法は、衛星から受信されたナビゲーション信号に基づいてナビゲーションデバイスの位置を決定することと、デバイスの配向センサーからのデータに基づいてデバイスの配向を決定することと、関心の地点の位置を得ることと、デバイスの第1のカメラから第1のライブ画像700を得ることと、デバイスのディスプレイ上に第1のライブ画像を表示することと、第1のライブ画像において、第1のライブ画像における関心の地点の第1の位置704を示す第1のマーカー702を表示することと、第2のライブ画像を得ることと、デバイスのディスプレイ上に第2のライブ画像を表示することと、第2のライブ画像において、第2のライブ画像における関心の地点の第2の位置を示す第2のマーカーを表示することとを含む。
【解決手段】ライブ画像において関心の地点をマーク付けるためのコンピュータ実装方法であって、方法は、衛星から受信されたナビゲーション信号に基づいてナビゲーションデバイスの位置を決定することと、デバイスの配向センサーからのデータに基づいてデバイスの配向を決定することと、関心の地点の位置を得ることと、デバイスの第1のカメラから第1のライブ画像700を得ることと、デバイスのディスプレイ上に第1のライブ画像を表示することと、第1のライブ画像において、第1のライブ画像における関心の地点の第1の位置704を示す第1のマーカー702を表示することと、第2のライブ画像を得ることと、デバイスのディスプレイ上に第2のライブ画像を表示することと、第2のライブ画像において、第2のライブ画像における関心の地点の第2の位置を示す第2のマーカーを表示することとを含む。
【発明の詳細な説明】
【技術分野】
【0001】
(関連出願への相互参照)
本出願は、2011年9月26日に出願された米国仮出願第61/539,424号の優先権を主張する。上記文献は、全体として本明細書において参照することによって援用される。
【0002】
(背景)
(1.分野)
本開示は、概して、全地球ナビゲーション衛星システム(GNSS)に関し、より具体的に、関心の地点のステークアウトのために、GNSSデバイス上のライブ画像に視覚表示を提供することに関する。
【背景技術】
【0003】
(2.関連技術の説明)
全地球ナビゲーション衛星システムの信号を利用するナビゲーション受信器(例えば、GPSおよびGLONASS)は、非常に高精度でさまざまな位置決めタスクができる。例えば、GLONASS受信器は、ナビゲーション衛星によって伝送される無線信号を受信および処理する。衛星信号は、受信器側においてローカル参照クロックに対して遅延を測定するために使われる擬似ランダム2進コードによって変調されるキャリア高調波信号である。これらの遅延測定は、受信器と衛星との間のいわゆる擬似範囲を決定するために使われる。受信器のローカルクロックが衛星搭載クロックと異なるので、擬似範囲は、真の幾何範囲と異なる。視界内の衛星の数が4つ以上の場合、測定される擬似範囲は、ユーザーの信号ポイント位置X=(x,y,z)T(ベクトルのすべてが列として表され;記号Tが行列/ベクトルの転置を示す)を決定するだけではなく、受信器クロックのオフセットも補償するように処理され得る。
【0004】
ステークアウトは、特に有用なGNSSアプリケーションの例である。ステークアウトの間に、特定された位置が配置され、マーカーが物理的位置において位置決めされる。GNSSデバイスは、ステークアウトが高度の位置精度(例えば、センチメートルレベルまで)で発生することを可能にし得る。ステークアウトは、建設、農業、および科学研究を含む多くの用途において有用である。
【発明の概要】
【発明が解決しようとする課題】
【0005】
GNSSデバイスを用いて関心の特定地点に対してステークアウトを実行する場合に、ユーザーは、GNSSデバイスによって提供された現在の位置を使用して、関心の地点の相対的位置を決定し得る。次に、ユーザーは、ユーザーが信じている関心の地点の方向に移動し得る。しかしながら、どの方向に移動するか(特に、関心の地点が数十メートル以内にある場合)を決定することが簡単ではない場合もある。GNSSデバイスが関心の地点の数センチメートル以内ある場合に、関心の地点の方向を決定することは特に難しくあり得る。
【課題を解決するための手段】
【0006】
(本発明の要約)
ナビゲーションデバイス上のライブ画像において関心の地点をマーク付けるための例示的な方法が提供される。ナビゲーションデバイスの位置は、衛星から受信されたナビゲーション信号に基づいて決定される。デバイスの配向は、デバイスの配向センサーからのデータに基づいて決定される。第1のライブ画像は、デバイスの第1のカメラから得られ、そしてデバイスのディスプレイ上に表示される。第1のマーカーは、第1のライブ画像において表示される。第1のマーカーは、第1のライブ画像における関心の地点の第1の位置を示す。第1の位置は、デバイスの位置、デバイスの配向および関心の地点の位置に基づく。第2のライブ画像は、デバイスの第2のカメラから得られ、そしてデバイスのディスプレイ上に表示される。第2のマーカーは、第2のライブ画像において表示される。第2のマーカーは、第2のライブ画像における関心の地点の第2の位置を示す。第2の位置は、デバイスの位置、デバイスの配向および関心の地点の位置に基づく。
【0007】
ナビゲーションデバイス上のライブ画像において関心の地点をマーク付けるための別の例示的な方法が提供される。ナビゲーションデバイスの位置は、衛星から受信されたナビゲーション信号に基づいて決定される。デバイスの配向は、デバイスの配向センサーからのデータに基づいて決定される。第1のライブ画像は、デバイスの第1のカメラから得られ、そしてデバイスのディスプレイ上に表示される。第1のマーカーは、第1のライブ画像において表示される。第1のマーカーは、第1のライブ画像における関心の地点の第1の位置を示す。第1の位置は、デバイスの位置、デバイスの配向および関心の地点の位置に基づく。
【0008】
例えば、本発明は以下の項目を提供する。
(項目1)
ライブ画像において関心の地点をマーク付けるためのコンピュータ実装方法であって、該方法は、
衛星から受信されたナビゲーション信号に基づいてナビゲーションデバイスの位置を決定することと、
該デバイスの配向センサーからのデータに基づいて該デバイスの配向を決定することと、
関心の地点の位置を得ることと、
該デバイスの第1のカメラから第1のライブ画像を得ることと、
該デバイスのディスプレイ上に該第1のライブ画像を表示することと、
該第1のライブ画像において、該第1のライブ画像における該関心の地点の第1の位置を示す第1のマーカーを表示することであって、該第1の位置は、該デバイスの該位置、該デバイスの該配向および該関心の地点の該位置に基づく、ことと、
第2のライブ画像を得ることと、
該デバイスの該ディスプレイ上に該第2のライブ画像を表示することと、
該第2のライブ画像において、該第2のライブ画像における該関心の地点の第2の位置を示す第2のマーカーを表示することであって、該第2の位置は、該デバイスの該位置、該デバイスの該配向および該関心の地点の該位置に基づく、ことと
を含む、方法。
(項目2)
上記第2のライブ画像は、上記第1のライブ画像の第1の視界に実質的に垂直である第2の視界を有する、上記項目に記載の方法。
(項目3)
上記第2のライブ画像を表示することは、上記関心の地点が上記第2の視界内にあることに応答して生じる、上記項目のいずれかに記載の方法。
(項目4)
上記第2のライブ画像を表示することは、ユーザーのコマンドに応答して生じる、上記項目のいずれかに記載の方法。
(項目5)
上記第1のマーカーは、固定部分および可変部分を含み、該固定部分は、上記デバイスから上記関心の地点までの距離に依存しない固定サイズを有し、該可変部分は、GNSSデバイスから該関心の地点までの該距離に基づくサイズを有する、上記項目のいずれかに記載の方法。
(項目6)
上記第1のマーカーは、上記デバイスの上記位置に関連付けられたエラーに依存する色である、上記項目のいずれかに記載の方法。
(項目7)
上記第2のマーカーは、上記デバイスの上記位置に関連付けられたエラーに依存する色である、上記項目のいずれかに記載の方法。
(項目8)
上記第1のマーカーは、上記デバイスと上記関心の地点との間の高度差の表示を含む、上記項目のいずれかに記載の方法。
(項目9)
上記第2のライブ画像は、上記デバイスの第2のカメラから得られる、上記項目のいずれかに記載の方法。
(項目10)
上記関心の地点の上記位置は、上記デバイス内のメモリーから得られる、上記項目のいずれかに記載の方法。
(項目11)
ライブ画像において関心の地点をマーク付けるための実行可能な命令を用いて符号化された非一時的コンピュータ読取可能な媒体であって、該命令は、
衛星から受信されたナビゲーション信号に基づいてナビゲーションデバイスの位置を決定することと、
該デバイスの配向センサーからのデータに基づいて該デバイスの配向を決定することと、
関心の地点の位置を得ることと、
該デバイスの第1のカメラから第1のライブ画像を得ることと、
該デバイスのディスプレイ上に該第1のライブ画像を表示することと、
該第1のライブ画像において、該第1のライブ画像における該関心の地点の第1の位置を示す第1のマーカーを表示することであって、該第1の位置は、該デバイスの該位置、該デバイスの該配向および該関心の地点の該位置に基づく、ことと、
第2のライブ画像を得ることと、
該デバイスの該ディスプレイ上に該第2のライブ画像を表示することと、
該第2のライブ画像において、該第2のライブ画像における該関心の地点の第2の位置を示す第2のマーカーを表示することであって、該第2の位置は、該デバイスの該位置、該デバイスの該配向および該関心の地点の該位置に基づく、ことと
を含む、コンピュータ読取可能な媒体。
(項目12)
上記第2のライブ画像は、上記第1のライブ画像の第1の視界に実質的に垂直である第2の視界を有する、上記項目のいずれかに記載のコンピュータ読取可能な媒体。
(項目13)
上記第2のライブ画像を表示することは、上記関心の地点が上記第2の視界内にあることに応答して生じる、上記項目のいずれかに記載のコンピュータ読取可能な媒体。
(項目14)
上記第2のライブ画像を表示することは、ユーザーのコマンドに応答して生じる、上記項目のいずれかに記載のコンピュータ読取可能な媒体。
(項目15)
上記第1のマーカーは、固定部分および可変部分を含み、該固定部分は、上記デバイスから上記関心の地点までの距離に依存しない固定サイズを有し、該可変部分は、GNSSデバイスから該関心の地点までの該距離に基づくサイズを有する、上記項目のいずれかに記載のコンピュータ読取可能な媒体。
(項目16)
上記第1のマーカーは、上記デバイスの上記位置に関連付けられたエラーに依存する色である、上記項目のいずれかに記載のコンピュータ読取可能な媒体。
(項目17)
上記第2のマーカーは、上記デバイスの上記位置に関連付けられたエラーに依存する色である、上記項目のいずれかに記載のコンピュータ読取可能な媒体。
(項目18)
上記第1のマーカーは、上記デバイスと上記関心の地点との間の高度差の表示を含む、上記項目のいずれかに記載のコンピュータ読取可能な媒体。
(項目19)
上記第2のライブ画像は、上記デバイスの第2のカメラから得られる、上記項目のいずれかに記載のコンピュータ読取可能な媒体。
(項目20)
上記関心の地点の上記位置は、上記デバイス内のメモリーから得られる、上記項目のいずれかに記載のコンピュータ読取可能な媒体。
(項目21)
ライブ画像上に関心の地点の視覚表示を提供するためのナビゲーションデバイスであって、該デバイスは、
第1の視界を有する第1のカメラと、
第2の視界を有する第2のカメラと、
衛星からナビゲーション信号を受信するように構成されたナビゲーションアンテナと、
メモリーであって、該メモリーは、
衛星から受信されたナビゲーション信号に基づいてナビゲーションデバイスの位置を決定することと、
該デバイスの配向センサーからのデータに基づいて該デバイスの配向を決定することと、
関心の地点の位置を得ることと、
該デバイスの第1のカメラから第1のライブ画像を得ることと、
該デバイスのディスプレイ上に該第1のライブ画像を表示することと、
該第1のライブ画像において、該第1のライブ画像における該関心の地点の第1の位置を示す第1のマーカーを表示することであって、該第1の位置は、該デバイスの該位置および該デバイスの該配向に基づく、ことと、
第2のライブ画像を得ることと、
該デバイスの該ディスプレイ上に該第2のライブ画像を表示することと、
該第2のライブ画像において、該第2のライブ画像における該関心の地点の第2の位置を示す第2のマーカーを表示することであって、該第2の位置は、該デバイスの該位置、該デバイスの該配向および該関心の地点の該位置に基づく、ことと
を行う命令を含む、メモリーと、
該命令を実行するように構成されたプロセッサと
を含む、デバイス。
(項目22)
上記第2のライブ画像は、上記第1のライブ画像の第1の視界に実質的に垂直である第2の視界を有する、上記項目のいずれかに記載のデバイス。
(項目23)
上記第2のライブ画像を表示することは、上記関心の地点が上記第2の視界内にあることに応答して生じる、上記項目のいずれかに記載のデバイス。
(項目24)
上記第2のライブ画像を表示することは、ユーザーのコマンドに応答して生じる、上記項目のいずれかに記載のデバイス。
(項目25)
上記第1のマーカーは、固定部分および可変部分を含み、該固定部分は、上記デバイスから上記関心の地点までの距離に依存しない固定サイズを有し、該可変部分は、GNSSデバイスから該関心の地点までの該距離に基づくサイズを有する、上記項目のいずれかに記載のデバイス。
(項目26)
上記第1のマーカーは、上記デバイスの上記位置に関連付けられたエラーに依存する色である、上記項目のいずれかに記載のデバイス。
(項目27)
上記第2のマーカーは、上記デバイスの上記位置に関連付けられたエラーに依存する色である、上記項目のいずれかに記載のデバイス。
(項目28)
上記第1のマーカーは、上記デバイスと上記関心の地点との間の高度差の表示を含む、上記項目のいずれかに記載のデバイス。
(項目29)
上記第2のライブ画像は、上記デバイスの第2のカメラから得られる、上記項目のいずれかに記載のデバイス。
(項目30)
上記関心の地点の上記位置は、上記デバイス内のメモリーから得られる、上記項目のいずれかに記載のデバイス。
【0009】
(摘要)
ナビゲーションデバイス上のライブ画像において関心の地点をマーク付けるための方法が提供される。ナビゲーションデバイスの位置は、衛星から受信されたナビゲーション信号に基づいて決定される。デバイスの配向は、デバイスの配向センサーからのデータに基づいて決定される。第1のライブ画像は、第1のカメラから得られ、そして表示される。第1のマーカーは、第1のライブ画像において表示される。第1のマーカーは、第1のライブ画像における関心の地点の第1の位置を示す。第2のライブ画像が得られ、そして表示される。第2のマーカーは、第2のライブ画像において表示される。第2のマーカーは、第2のライブ画像における関心の地点の第2の位置を示す。第1および第2の位置は、デバイスの位置、デバイスの配向および関心の地点の位置に基づく。
【図面の簡単な説明】
【0010】
【図1】図1は、例示的な携帯GNSSデバイスの透視図を描く。
【図2】図2は、例示的な携帯GNSSデバイスの別の透視図を描く。
【図3】図3は、ユーザーのためのディスプレイスクリーンを含む例示的な携帯GNSSデバイスの背面図を描く。
【図4】図4は、例示的な携帯GNSSデバイスの底面図を描く。
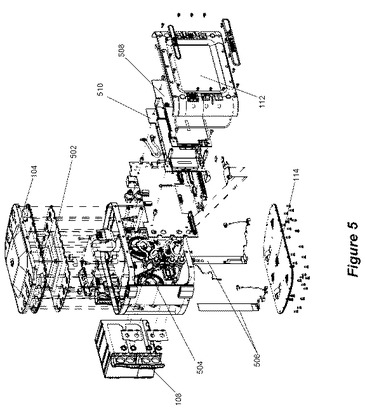
【図5】図5は、例示的な携帯GNSSデバイスの分解図を描く。
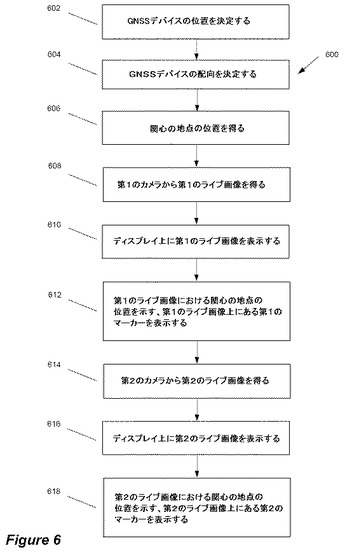
【図6】図6は、ステークアウトの間に、視覚ガイダンスを提供するための例示的な技術に対するフローチャートを描く。
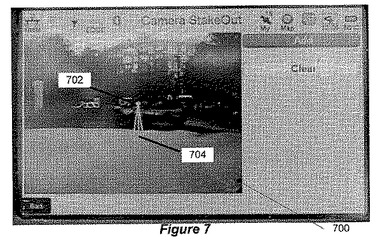
【図7】図7は、第1の位置と、第1のマーカーを表示する配向とにおいてGNSSデバイスのスクリーンショットを描く。
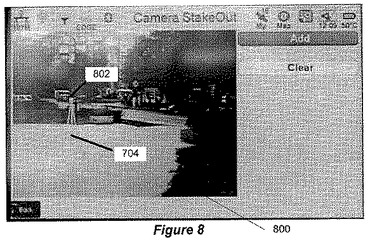
【図8】図8は、第2の位置と、第1のマーカーを表示する配向とにおいてGNSSデバイスのスクリーンショットを描く。
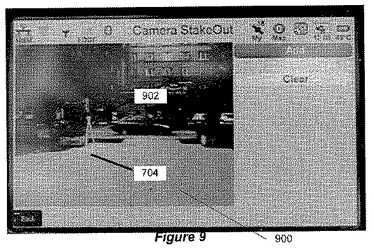
【図9】図9は、第3の位置と、第1のマーカーを表示する配向とにおいてGNSSデバイスのスクリーンショットを描く。
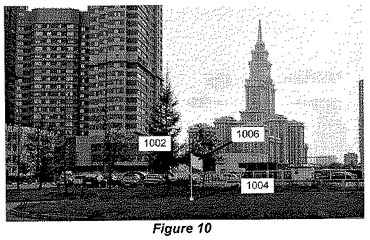
【図10】図10は、例示的な第1のマーカーを描く。
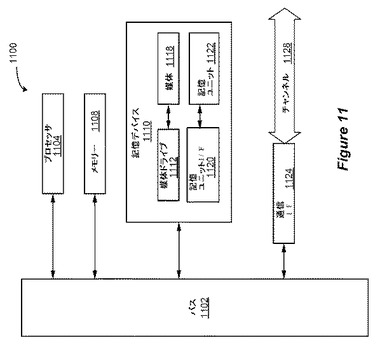
【図11】図11は、以下に議論される処理機能のうちの一部または全部を実装するために使われ得る典型的なコンピューティングシステムを例示する。
【発明を実施するための形態】
【0011】
以下の説明は、当業者がさまざまな実施形態を構成し、かつ使用することを可能にするように示される。具体的なデバイス、技術および適用の説明は、単に例として提供される。本明細書に記述される例に対するさまざまな変更は、容易に当業者にとって明白であり、本明細書に規定される一般的な原理は、さまざまな実施形態の真意および範囲から離れることなしに他の例および用途に適用され得る。従って、さまざまな実施形態は、本明細書に記述され、かつ示される例に限定されることが意図されず、特許請求の範囲と矛盾しない範囲に与えられるべきである。
【0012】
本明細書に説明される技術は、GNSSデバイスが、ユーザーがステークアウトを実行することを視覚的に支援することを可能にし得る。関心の地点の位置の視覚表示を関心の地点を含むシーンのライブ画像に提供することによって、以下に説明される技術は、ユーザーがステークアウトを完了する速度を増大させ得る。本明細書に説明される技術が、ステークアウトへの特定の関連性を有するが、この技術は、ステークアウトに限定されず、他のGNSSアプリケーションにおいても有用であり得ることが理解されるべきである。例のGNSSアプリケーションとしてのステークアウトの使用は、限定ではないように構成されるべきである。
【0013】
図1は、例示的な携帯GNSSデバイス100を例示する。携帯GNSSデバイス100は、単一のハウジング102を利用する。いくつかのGNSS構成要素は、ハウジング102と一体であり、それらが、ハウジング内にあり、またはハウジングにしっかりと取り付けられる。しっかりと取り付けられた構成要素は、取り外し可能であり得る。ハウジング102は、ユーザーが典型的なカメラを保持し得る態様に類似して携帯GNSSデバイス100を保持することを可能にする。一例において、ハウジング102は、複数のGNSS衛星によって伝送され、かつ位置を決定するために携帯GNSSデバイス100によって使われる信号を受信し得るGNSSアンテナ502(図5に示される)をカバーするためのGNSSアンテナカバー104を含み得る。GNSSアンテナ502は、ハウジング102と一体であり、それが、ハウジング102内、GNSSアンテナカバー104下にある。
【0014】
一例において、GNSSアンテナ502は、少なくとも4つのGNSS衛星によって伝送される信号を受信し得る。図1によって示される例において、GNSSアンテナカバー104は、携帯GNSSデバイス100の上側面上に位置する。
【0015】
携帯GNSSデバイス100は、ハウジング102と一体の通信アンテナ106のためのカバーをさらに含む。本発明の実施形態において、通信アンテナ106のためのカバーの下に囲まれるGSM(登録商標)、UHF、およびWiFi/Bluetooth(登録商標)アンテナを含むこのような3つの通信アンテナがあり得る。
【0016】
携帯GNSSデバイス100の例示的な分解図が、図5に示される。通信アンテナ506は、カバー106の下に位置決定される。GSM(登録商標)およびUHFアンテナは、単方向のみの通信アンテナであり得る。言い換えると、GSM(登録商標)およびUHFアンテナは、信号を受信するのみのためであって、信号を伝送しないように使われ得る。WiFiアンテナは、双方向通信を可能にし得る。通信アンテナ506は、ベーストランシーバーからの微分補正データまたは未処理の位置決定データのような位置決定支援データを受信する。
【0017】
図1に示される例において、GNSSアンテナカバー104は、ハウジング102の上に位置する。図1の同じ例において、通信アンテナカバー106は、ハウジング102の前面に位置する。
【0018】
携帯GNSSデバイス100は、少なくとも1つのハンドグリップ108をさらに含み得る。図1に示される例において、2つのハンドグリップ108は、ハウジング102に対して一体である。ハンドグリップ108は、快適さのために、そしてユーザーの手の滑りを減少するために、ゴム材料を用いてカバーされ得る。
【0019】
前面カメラ110は、携帯GNSSデバイス100の前面上に位置し得る。底部カメラ116は、図4に示される例において携帯GNSSデバイス100の底面上に位置し得る。カメラは、スチールまたはビデオカメラであり得る。前面カメラ110および底部カメラ116は、同じまたは異なる視界を有し得る。
【0020】
ある実施形態において、ハンドグリップ108はまた、通信アンテナカバー106に近いように位置決定され得る。ハンドグリップ108は、図1におけるように、ユーザーがハンドグリップ108をグリップしているときに、ユーザーがGNSSアンテナ502および通信アンテナ506のアンテナパターンと最小限に干渉する位置に示される。例えば、ユーザーの手は、この構成において、例えば、通信アンテナカバー106の側面に対して後ろかつ離れたハンドグリップ108と共に、ハンドグリップ108をグリップすると同時に、−40dBの干渉より大きくさせない。
【0021】
図2および図3に示されるように、携帯GNSSデバイス100は、ユーザーがデバイスを位置決定することを支援する情報を表示するためのディスプレイ112をさらに含み得る。ディスプレイ112は、液晶(LCD)ディスプレイ、発光ダイオード(LED)ディスプレイ等のような任意の電子ディスプレイであり得る。ディスプレイ112は、ディスプレイ112が入力デバイスとして動作することを可能にするタッチ能力を含み得る。このようなディスプレイデバイスは、当業者によって周知であり、そして任意のこのようなデバイスが使われ得る。図2によって示される例において、ディスプレイ112は、携帯GNSSデバイス100のハウジング102の裏面と一体である。
【0022】
携帯GNSSデバイス100は、静止画像またはビデオを記録するためのカメラをさらに含み得る。このような記録デバイスは、当業者によって周知であり、そして任意のこのようなデバイスが使われ得る。図1に例示される例において、前面カメラ110は、携帯GNSSデバイス100の前側面上に位置する。前面カメラ110の位置決定のさらなる詳細な説明は、米国特許出願公開第2011/0075886号において提供され、上記文献が、全目的のためにその全体として参照することよって本明細書において援用される。一例において、ディスプレイ112は、前面カメラ110の出力を表示するために使われ得る。
【0023】
図4を参照して、携帯GNSSデバイス100はまた、観察し、かつ関心の地点のマーカーを用いる携帯GNSSデバイス100のアラインメントのために携帯GNSSデバイス100の底部上の第2の底部カメラ116を含み得る。関心の地点のマーカーの画像はまた、GNSSデバイス808が、正しく取り付けられていること、または記録されたカメラ情報に基づいて、後にミスアラインメントを補償することを確実にするために、GNSSデータと一緒に記録され得る。
【0024】
携帯GNSSデバイス100は、配向センサー(示されていない)を含み得、配向センサーは、さまざまなタイプのセンサー(例えば、水平センサー、MEMSジャイロスコープ、またはデバイスのための配向データを生成するための磁気コンパス)を含み得る。配向データは、地面に対して携帯GNSSデバイス100および関連付けられた部品(例えば、カメラ110)の配向を記述する。配向データは単独で、またはGNSS位置データおよび画像データ等のさまざまな他のデータと関連して記録され得る。
【0025】
水平センサーは、傾斜計、加速度計等のような任意のタイプの水平センサーであり得る。このような水平センサーは、当業者によって周知であり、任意のこのようなデバイスが使われ得る。一例において、水平センサーの出力の表示は、ディスプレイ112を用いて表示され得る。水平センサーの情報(例えば、ピッチおよびロール)は、GNSSデータと共に記録され得る。水平センサーの情報は、例えば、後にアンテナのミスレベルを補償するために有用であり得る。
【0026】
磁気コンパスは、当業者によって周知であり、任意のこのようなデバイスが使われ得る。磁気コンパスは、携帯GNSSデバイス100の向首方向および方位を決定し得る。磁気コンパスデータは、キャプチャーされた画像と共に記録され得る。磁気コンパスデータは、例えば、前方を向いているカメラから得た画像データの方向を決定するために有用であり得る。
【0027】
MEMSジャイロスコープは、当業者によって周知であり、任意のこのようなデバイスが使われ得る。MEMSジャイロスコープは、携帯GNSSデバイス100の角速度の測定を可能にする。例えば、磁気コンパスの開始方向に基づいて、MEMSジャイロスコープの情報は、デバイスが向いている前方の方向を決定するために使われ得る。MEMSジャイロスコープの情報は、キャプチャーされた画像と共に記録され得る。MEMSジャイロスコープの情報は、例えば、前方を向いているカメラによってキャプチャーされた2つの画像の間の空間的関係を決定するために使われ得る。
【0028】
多くのタイプの配向センサーが上に議論されるが、これらの例は、限定されるものではない。当業者は、他の配向センサーも使われ得ることを理解する。
【0029】
携帯GNSSデバイス100は、直線距離を測定するための距離センサー(示されていない)をさらに含み得る。この距離センサーは、ソナー、レーザー、レーダー等のような任意の距離測定テクノロジーを使用し得る。距離センサーは、GNSSデバイス100周辺の物体への距離を決定するために使われ得る。GNSSデバイス100の底部に取り付けられた場合に、距離センサーは、GNSSデバイス100の地面からの高さも決定し得る。このような距離センサーは、当業者によって周知であり、任意のこのようなデバイスが使われ得る。
【0030】
図4は、本発明の実施形態に従う携帯GNSSデバイス100の底面図を例示する。携帯GNSSデバイス100は、本発明の一部の実施形態において、3つのねじブッシュ114のような取り付け構造によって、三脚またはいくつかの他の支持構造上に取り付けられ得る。
【0031】
図5は、携帯GNSSデバイス100の分解図を例示する。組立されると、GNSSアンテナ502は、GNSSアンテナカバー104によってカバーされ、通信アンテナ506は、通信アンテナカバー106によってカバーされる。受信器508は、GNSSアンテナ502から受信されたGNSS衛星信号を地球ベースの座標(例えば、WG84、ECEF、ENU等)に変換し得る。GNSS受信器508はさらに、一緒に接続されている通信アンテナ506および通信ボード510から受信された位置決定支援データと共に、処理のためのオンボードCPUに座標を送信し得る。
【0032】
図6は、ステークアウトの間に、視覚ガイダンスを提供する例示的な技術のためのフローチャート600を描く。例示的な技術は、GNSSデバイス(例えば、前述のGNSSデバイス100)上に実装されることに適している。
【0033】
例示的な技術のステップ602において、GNSSデバイスは、複数のGNSS衛星から受信された信号に基づいてGNSSデバイスの位置を決定する。GNSS衛星信号に加えて、GNSSデバイスの位置は、基地局から受信された位置決定支援データにも基づき得る。支援信号は、例えば、通信受信器508(図5)によって受信され得る。
【0034】
衛星および基地局からの信号に基づいて位置決定することのさらなる詳細な説明は、2008年2月15日に出願された米国特許出願第12/070,333号において入手可能であり、2009年1月27日に出願された米国特許出願公開第2008/0208454号および第12/360,808号として公開され、本発明の譲受人に譲渡された米国特許出願公開第2009/0189804号として公開される。上記文献の各々は、すべての目的のために、全体として参照することによって本明細書に援用される。
【0035】
例示的な技術のステップ604において、GNSSデバイスは、配向センサーからのデータに基づいてGNSSデバイスの配向を決定する。例えば、デジタルコンパス、ジャイロスコープ、および加速度計のようなセンサーは、配向データ(例えば、磁気方向、パン(pan)、チルト、およびヨーデータ)を提供し得る。他のセンサーも使われ得、他の配向データも生成され得る。
【0036】
例示的な技術のステップ606において、GNSSデバイスは、関心の地点の位置を得る。例えば、GNSSデバイスは、メモリーから位置をロードし得る。位置を得る他の例は、入力デバイス(例えば、キーボードまたはタッチスクリーン)を用いてユーザーから位置を得ることと、通信受信器を用いてデータに無線でアクセスすることとを含むが、それらに限定されない。関心の地点の位置は、関心の地点の位置を識別するためのデータを含む。いくつかの場合において、位置は、関心の地点に対する1組の経度、緯度、および高度の値であり得る。他の場合において、高度データは、経度および緯度、近くの高度、または他の推定方法に基づいて省略または推定され得る。なお他の場合において、位置は、地球ベースの座標(例えば、WGS84、ECEF、ENU等)であり得る。
【0037】
例示的な技術のステップ608において、GNSSデバイスは、第1のカメラから第1のライブ(すなわち、実時間)画像を得る。例えば、前述のGNSSデバイス100を参照して、第1のライブ画像は、カメラ110の視界内に現在存在するシーンであり得る。ライブまたは実時間は、画像が描くものにおいて時間遅延がある可能性を排除しない。
【0038】
例示的な技術のステップ610において、GNSSデバイスは、GNSSデバイスのディスプレイ上に第1のライブ画像を表示する。例えば、前述のGNSSデバイス100を参照して、第1のライブ画像は、ディスプレイ112上に表示され得る。GNSSデバイスのディスプレイは、特定のフレームレート(例えば、毎秒10〜30フレーム)において第1のカメラからの画像を用いて更新され得るが、任意のフレームレートが使われ得る。
【0039】
例示的な技術のステップ612において、GNSSデバイスは、第1の画像において関心の地点の位置を示すディスプレイ上に第1のマーカーを表示する。第1の画像における関心の地点の位置は、ステップ606において得られた関心の地点の位置と、ステップ602において決定されるGNSSデバイスの位置と、(ステップ602および606からの位置から決定される)GNSSデバイスへの関心の地点の距離と、ステップ604において規定されるGNSSデバイスの配向と、第1のカメラの視界とのようなデータに基づいて決定され得る。
【0040】
ステップ612の一例において、関心の地点の3次元位置は、ステップ606からの位置データに基づいて知られる。関心の地点の高度が既知ではない場合において、高度が推定され得るか、または関心の地点が、全ての高度にあると考えられ得る。GNSSデバイスのカメラから得られた画像における(3次元の)視界の内容は、カメラの視界の角度(すなわち、水平ビュー角度および垂直ビュー角度)に基づいて決定され得る。次に、GNSSデバイスの位置と、前面に取り付けられたカメラに対するGNSSデバイスの配向と同じである視界の配向とに基づいて、関心の地点の3次元の位置が視界の3次元範囲内にあるか否かが決定され得る。さらに、画像における関心の地点の近似位置は、同じデータを用いて決定され得る。関心の地点の画像内の位置が近似的であるが、非常に正確であり得ることが理解されるべきである。いくつかの場合において、ゼロでないピクセル寸法のために、画像上の関心の地点の位置は、完全に正確に決定され得る。例えば、0.1ピクセルの精度を有する近似された位置は、エラーのない正確な位置になる。
【0041】
関心の地点が、第1の画像の視界内にない場合、標識(例えば、矢印)が、関心の地点が第1の画像の視界内にあるように、GNSSデバイスが配向される必要がある方向を指示するように表示され得る。
【0042】
第1のマーカーを配置する例として、図7〜9は、それぞれ、3つの異なる位置および配向においてGNSSデバイスによって得られた第1のライブ画像700、800、および900を描く。図7〜9の第1のマーカー702、802および902は、それぞれ、ライブ画像における関心の地点の位置704を示す。一連の第1のライブ画像は、GNSSデバイスがどのように位置決めおよび配向されるか関わらず、第1のマーカーがライブ画像における関心の地点にわたってどのように配置され得るかを例示する。
【0043】
第1のマーカーは、任意数の形態をとり得る。図10は、固定部分1004と可変部分1006と含む例示的な第1のマーカー1002を描く。固定部分1004は、GNSSデバイスから関心の地点までの距離に依存して変化しない1組のサイズであり得る。可変部分1006は、GNSSデバイスから関心の地点までの距離に依存して可変であるサイズであり得る。例えば、図10において描かれるように、可変部分1006は、GNSSデバイスから関心の地点までの距離に従って縮尺されるフラッグであり得る。言い換えると、フラッグは、GNSSデバイスが関心の地点に接近するにつれて大きくなり、GNSSデバイスが関心の地点から離れて行くにつれて小さくなる。GNSSデバイスがいくつかの閾値距離よりも関心の地点からより遠い場合に、フラッグは、非常に小さいとき(例えば、一点または小さいオブジェクト)があり、または全く示されないときもある。
【0044】
例示的な第1のマーカー1002は、GNSSデバイスの位置に関連付けられたエラーの表示を提供するために、色またはいくつかの他の特徴を変化させ得る。例えば、ステップ602において決定されたGNSSデバイスの位置が、リアルタイム・キネマティクス(「RTK」)の固定の解に基づく場合、第1のマーカー1002またはその一部分は、特定の色であり得、例えば、フラッグは、緑色である。同様に、ステップ602において決定されたGNSSデバイスの位置が、RTKの浮動の解に基づく場合、第1のマーカー1002またはその一部分は、別の特定の色であり得、例えば、フラッグは、黄色である。GNSSデバイスが独立型である場合、第1のマーカー1002またはその一部分は、別の特定の色であり得、例えば、フラッグは、赤色である。他の色スキームも使われ得る。
【0045】
第1のマーカーは、他の情報も表示し得る。例えば、GNSSデバイスと関心の地点との間の高度差が表示され得、または他にもGNSSデバイスの外観は、高度差に依存し得る。例えば、第1のマーカーの高さは、GNSSデバイスと関心の地点との間の高度差に依存し得る。関心の地点の高度は、ステップ606において既知であり得る。GNSSデバイスの高度は、ステップ602において既知であり得る。
【0046】
代替的には、GNSSデバイス以下のグラウンドと関心の地点との間の高度差が表示され得、または他にも第1のマーカーの外観は、高等差に依存し得る。例えば、第1のマーカーの高さは、GNSSデバイスと関心の地点との間の高度差に依存し得る。GNSSデバイスの下方のグラウンドの高度は、ステップ606において決定されたGNSSデバイスの位置と、GNSSデバイスがグラウンドから離れている高さに関する情報とに基づいて知られ得る。この高さは、例えば、ユーザーまたはGNSSデバイスの底部に配置された距離センサーから得られ得る。
【0047】
第1のマーカーが特定の例に対して上に議論されたが、第1のマーカーは、他の形態もとり得る。例えば、第1のマーカーは、単に簡単なボールまたはクロスであり得る。第1のマーカーは、より複雑な形態もとり得る。第1のマーカーは、本例示的な技術から逸脱することなしに、幅広いさまざまな特徴を用いて実装され得ることが理解されるべきである。
【0048】
例示的な技術のステップ614において、GNSSデバイスは、第2のカメラから第2のライブ画像を得る。例えば、前述のGNSSデバイス100に関して、第2のライブ画像は、カメラ116の視界において現在存在するシーンであり得る。ステップ614の別の例として、第2のライブ画像は、第1のカメラの光軸が変更された場合、第1のカメラからも得られ得る。例えば、光学系は、第1のカメラの視界を下へ90°で回転するために使われ得る。
【0049】
GNSSデバイスの一例は、それぞれ、第1および第2のライブ画像を生成し、それらは重なる、第1および第2のカメラを含む。別のGNSSデバイスは、別個で重ならない第1および第2のライブ画像をそれぞれ生成する第1および第2のカメラを含み得る。第1および第2のカメラのさまざまな特徴(例えば、ビューおよびカメラ配向)は、第1および第2のライブ画像が重なるか否かに影響し得る。代替的には、第1および第2の画像が重なるか否かは、第1および第2のライブ画像の中でシーンが第1および第2のカメラからどの程度離れているかにも依存し得る。
【0050】
前述のGNSSデバイス100は、第2のカメラの光軸に垂直である光軸を有する第1のカメラを有する。従って、カメラ110が水平線に向けられている間、カメラ116は、GNSSデバイス100の直下のグラウンドに向けられ得る。他のGNSSデバイスは、互いに実質的に垂直である光軸を有するカメラを有し得る(例えば、第1のカメラの光軸が、第2のカメラの光軸に垂直である10°の範囲内にある)。なお他のGNSSデバイスは、互いに対して他の配向を有する光軸を有するカメラを有し、例えば、GNSSデバイスの左右の側面上にカメラを有し得る。
【0051】
例示的な技術のステップ616において、GNSSデバイスは、GNSSデバイスのディスプレイ上に第2のライブ画像を表示する。いくつかの例において、第2のライブ画像は、第1のライブ画像の代わりに表示され得る。他の例において、第2のライブ画像は、第1のライブ画像と同時に表示され得る。例えば、GNSSデバイスのディスプレイは、第1および第2の画像に対して2つの部分に分割され得る。別の例において、GNSSデバイスは、2つのディスプレイを有し得、各ディスプレイは、第1または第2のライブ画像のいずれかを表示する。
【0052】
本例示的な技術において、ステップ616は、第2のライブ画像の視界内にある関心の地点に応答して実行され得る。別の例示的な技術において、ステップ616は、第1のライブ画像の視界から出る関心の地点に応答して実行され得る。別の例示的な技術において、ステップ616は、関心の地点が第2のライブ画像の視界内にあるか否かに関わらず、ユーザーのコマンドに応答して実行され得る。
【0053】
例示的な技術のステップ618において、GNSSデバイスは、第のライブ画像にある第2のマーカーを表示する。第2のマーカーは、第2のライブ画像において関心の地点の位置を示す。位置は、ステップ612に対して前述のような同様な手順を用いて決定され得る。しかしながら、第2のマーカーの形態は、第1のマーカーに対して前述のように同様な形態をとり得る。例えば、第2のマーカーは、第1のマーカーに対して前述したように固定部分および可変部分も有し得る。次に、第2のマーカーは、グラウンド上の物理的マーカーをGNSSデバイスのディスプレイ上の第2のマーカーと整列させることによって、関心の地点を正確にステークアウトするために使われ得る。
【0054】
別の例示的な技術において、ステップ614、616、および618が省略される以外、フローチャート600(図6)と同じステップが実行される。この技術において、1つのカメラのみが必要とされる。
【0055】
図11は、本発明の実施形態における処理機能を実装するために使用され得る典型的なコンピューティングシステム1100を例示する。例えば、このタイプのコンピューティングシステムがクライアントおよびサーバにおいて使われ得る。当業者はまた、他のコンピュータシステムまたは構造を用いて、どのように本発明を実装するかも認識する。コンピューティングシステム1100は、例えば、デスクトップ、ラップトップまたはノートブックコンピュータ、携帯コンピューティングデバイス(PDA、セルフォン、パームトップ等)、マインフレーム、サーバ、クライアント、または所与のアプリケーションまたは環境に対して望ましいかまたは適切であり得る任意の他のタイプの特定または汎用のコンピューティングデバイスを表し得る。コンピューティングシステム1100は、プロセッサ1104のような1つ以上のプロセッサを含み得る。プロセッサ1104は、例えば、マイクロプロセッサ、マイクロコントローラまたは他のコントロール論理のような汎用または特定目的の処理エンジンを用いて実装され得る。この例において、プロセッサ1104は、バス1102または他の通信媒体に接続される。
【0056】
コンピューティングシステム1100は、プロセッサ1104によって実行されるべき情報および命令を格納するための、ランダムアクセスメモリー(RAM)または他の動的メモリーのようなメインメモリー1108も含み得る。メインメモリー1108は、プロセッサ1104によって実行されるべき命令の実行の間に、一時的な変数または他の中間の情報を格納するためにも使われ得る。コンピューティングシステム1100は、同様に、読み取り専用のメモリー(「ROM」)またはプロセッサ1104のための静的情報および命令を格納するための、バス1102に接続される他の静的記憶デバイスを含み得る。
【0057】
コンピューティングシステム1100は、例えば、媒体ドライブ1112および取り外し可能な記憶インターフェース1120を含み得る情報記憶システム1110も含み得る。媒体ドライブ1112は、ハードディスクドライブ、フロッピディスクドライブ、磁気テープドライブ、光学ディスクドライブ、CDまたはDVDドライブ(RまたはRW)、または他の取り外し可能または固定の媒体ドライブのような固定または取り外し可能な記憶媒体をサポートするためのドライブまたは他のメカニズムを含み得る。記憶媒体1118は、例えば、ハードディスク、フロッピディスク、磁気テープ、光学ディスク、CDまたはDVD、または媒体ドライブ1112によって読み取られまた書き込まれる他の固定または取り外し可能な媒体を含み得る。これらの例が例示するように、記憶媒体1118は、コンピュータ読み取り可能な記憶媒体を含み得、記憶媒体がその中に格納された特定のコンピュータソフトウェアまたはデータを有する。
【0058】
代替的な実施形態において、情報記憶システム1110は、コンピュータプログラムまたは他の命令またはデータがコンピューティングシステム1100内にロードされることを可能にするための他の類似な部品を含み得る。このような部品は、例えば、プログラムカートリッジおよびカートリッジインターフェースのような取り外し可能な記憶ユニット1122およびインターフェース1120と、取り外し可能なメモリー(例えば、フラッシュメモリーまたは他の取り外し可能なメモリーモジュール)およびメモリースロットと、ソフトウェアおよびデータが取り外し可能な記憶ユニット1118からコンピューティングシステム1100までに転送されることを可能にする他の取り外し可能な記憶ユニット1122およびインターフェース1120とを含み得る。
【0059】
コンピューティングシステム1100は、通信インターフェース1124も含み得る。通信インターフェース1124は、ソフトウェアおよびデータがコンピューティングシステム1100と外部のデバイスとの間に転送されることを可能にするために使われ得る。通信インターフェース1124の例は、モデム、(Ethernet(登録商標)または他のNICカードのような)ネットワークインターフェース、(例えば、USBポートのような)通信ポート、PCMCIAスロットおよびカード等を含み得る。ソフトウェアと、通信インターフェース1124を介して転送されるデータとは、通信インターフェース1124によって受信されることが可能である電気、電磁気、光学または他の信号であり得る信号の形態である。これらの信号は、チャンネル1128を介して通信インターフェース1124に提供される。このチャンネル1128は、信号を搬送し得、無線媒体、ワイヤまたはケーブル、ファイバー光学系、または他の通信媒体を用いて実装され得る。チャンネルのいくつかの例は、フォンライン、セルラフォンライン、RFライン、ネットワークインターフェース、局所または広いエリアのネットワーク、および他の通信チャンネルを含む。
【0060】
本明細書において、用語「コンピュータプログラム製品」、「コンピュータ読み取り可能な記憶媒体」等は、概して、例えば、メモリー1108、記憶媒体1118、または取り外し可能な記憶ユニット1122のような物理的実体のある媒体を指すために使われ得る。これらの形式および他の形式のコンピュータ読み取り可能な記憶媒体は、プロセッサが特定の動作を実行するようにするために、プロセッサ1104による使用のための1つ以上の命令を格納することにおいて必要とされ得る。概して、(コンピュータプログラムの形で分類され得または他の分類であり得る)「コンピュータプログラムコード」と呼ばれるこのような命令は、実行されるときに、コンピューティングシステム1100が本発明の実施形態の特徴または機能を行うことを可能にする。コードは、直接に、プロセッサに特定の動作を実行させ、それをするようにコンパイルさせられ、またはそれをするように他のソフトウェア、ハードウェア、またはファームウェア要素(例えば、標準機能を実行するためのライブラリ)と組み合わされ得ることを留意する。
【0061】
構成要素がソフトウェアを用いて実装される実施形態において、ソフトウェアは、例えば、取り外し可能な記憶媒体1118、ドライブ1112または通信インターフェース1124を用いて、コンピュータ読み取り可能な記憶媒体内に格納され得、そしてコンピューティングシステム1100内にロードされ得る。コントロール論理(この例において、ソフトウェア命令またはコンピュータプログラムコード)は、プロセッサ1104によって実行されるときに、本明細書に記述されるように、プロセッサ1104に本発明の機能を行わせる。
【0062】
明瞭にするための上記説明が、異なる機能のユニットを参照して本発明の実施形態を説明したことが認識される。しかし、異なる機能のユニット間における機能の任意の適切な配分が、本発明から逸脱することなしに使われ得ることは明白である。従って、具体的な機能ユニットへの参照は、厳密な論理的または物理的構造または組織を表すより、むしろ説明された機能を提供するための適切な手段への参照とみなされ得るだけである。
【0063】
本発明は、ハードウェア、ソフトウェア、ファームウェアまたはそれらの組み合わせを含む任意の適切な形態において実装され得る。本発明の異なる局面は、1つ以上のデータプロセッサまたはデジタル信号プロセッサにおいて作動するコンピュータソフトウェアまたはファームウェアとして少なくとも部分的に実装され得る。本発明の実施形態の要素および部品は、適切な方法で物理的、機能的および論理的に実装され得る。実際は、機能は、単一のユニットにおいて、複数のユニットにおいて、または他の機能ユニットの一部分として実装され得る。このように、本発明は、単一のユニットにおいて実装され得、または異なるユニットおよびプロセッサの間に物理的かつ機能的に配分され得る。
【0064】
本発明は、いくつかの実施形態に関連して説明されたが、本明細書において説明された特定の形態に限定されるものではない。むしろ、本発明の範囲は、請求項のみによって限定される。加えて、特徴が、特定の実施形態に関連して説明されるように見えるが、当業者は、説明された実施形態のさまざまな特徴が本発明に従って組み合わせられ得ることを認識する。さらに、実施形態に関連して説明された本発明の局面は、発明として独立であり得る。
【0065】
さらに、個々に列挙されるが、複数の手段、構成要素、または方法ステップは、例えば、単一のユニットまたはプロセッサによってインプリメントされ得る。さらに、個々の特徴が、異なる請求項内に含まれ得るが、これらは、有利に組み合わせられることが可能であり得、そして異なる請求項の包含は、特徴の組み合わせが実行可能または有利ではないことを暗示しない。また、請求項の1つのカテゴリの特徴の包含は、このカテゴリの限定を暗示しなく、むしろ特徴が、適切のように、他の請求項のカテゴリに同等的に適用可能であり得る。
【0066】
さらに、さまざまな改変および代替物は、本発明の精神および範囲から逸脱することなしに当業者によって加えられ得ることが認識される。本発明は、前述の例示的詳細によって限定されるではなく、むしろ請求範囲従って規定されるべきである。
【技術分野】
【0001】
(関連出願への相互参照)
本出願は、2011年9月26日に出願された米国仮出願第61/539,424号の優先権を主張する。上記文献は、全体として本明細書において参照することによって援用される。
【0002】
(背景)
(1.分野)
本開示は、概して、全地球ナビゲーション衛星システム(GNSS)に関し、より具体的に、関心の地点のステークアウトのために、GNSSデバイス上のライブ画像に視覚表示を提供することに関する。
【背景技術】
【0003】
(2.関連技術の説明)
全地球ナビゲーション衛星システムの信号を利用するナビゲーション受信器(例えば、GPSおよびGLONASS)は、非常に高精度でさまざまな位置決めタスクができる。例えば、GLONASS受信器は、ナビゲーション衛星によって伝送される無線信号を受信および処理する。衛星信号は、受信器側においてローカル参照クロックに対して遅延を測定するために使われる擬似ランダム2進コードによって変調されるキャリア高調波信号である。これらの遅延測定は、受信器と衛星との間のいわゆる擬似範囲を決定するために使われる。受信器のローカルクロックが衛星搭載クロックと異なるので、擬似範囲は、真の幾何範囲と異なる。視界内の衛星の数が4つ以上の場合、測定される擬似範囲は、ユーザーの信号ポイント位置X=(x,y,z)T(ベクトルのすべてが列として表され;記号Tが行列/ベクトルの転置を示す)を決定するだけではなく、受信器クロックのオフセットも補償するように処理され得る。
【0004】
ステークアウトは、特に有用なGNSSアプリケーションの例である。ステークアウトの間に、特定された位置が配置され、マーカーが物理的位置において位置決めされる。GNSSデバイスは、ステークアウトが高度の位置精度(例えば、センチメートルレベルまで)で発生することを可能にし得る。ステークアウトは、建設、農業、および科学研究を含む多くの用途において有用である。
【発明の概要】
【発明が解決しようとする課題】
【0005】
GNSSデバイスを用いて関心の特定地点に対してステークアウトを実行する場合に、ユーザーは、GNSSデバイスによって提供された現在の位置を使用して、関心の地点の相対的位置を決定し得る。次に、ユーザーは、ユーザーが信じている関心の地点の方向に移動し得る。しかしながら、どの方向に移動するか(特に、関心の地点が数十メートル以内にある場合)を決定することが簡単ではない場合もある。GNSSデバイスが関心の地点の数センチメートル以内ある場合に、関心の地点の方向を決定することは特に難しくあり得る。
【課題を解決するための手段】
【0006】
(本発明の要約)
ナビゲーションデバイス上のライブ画像において関心の地点をマーク付けるための例示的な方法が提供される。ナビゲーションデバイスの位置は、衛星から受信されたナビゲーション信号に基づいて決定される。デバイスの配向は、デバイスの配向センサーからのデータに基づいて決定される。第1のライブ画像は、デバイスの第1のカメラから得られ、そしてデバイスのディスプレイ上に表示される。第1のマーカーは、第1のライブ画像において表示される。第1のマーカーは、第1のライブ画像における関心の地点の第1の位置を示す。第1の位置は、デバイスの位置、デバイスの配向および関心の地点の位置に基づく。第2のライブ画像は、デバイスの第2のカメラから得られ、そしてデバイスのディスプレイ上に表示される。第2のマーカーは、第2のライブ画像において表示される。第2のマーカーは、第2のライブ画像における関心の地点の第2の位置を示す。第2の位置は、デバイスの位置、デバイスの配向および関心の地点の位置に基づく。
【0007】
ナビゲーションデバイス上のライブ画像において関心の地点をマーク付けるための別の例示的な方法が提供される。ナビゲーションデバイスの位置は、衛星から受信されたナビゲーション信号に基づいて決定される。デバイスの配向は、デバイスの配向センサーからのデータに基づいて決定される。第1のライブ画像は、デバイスの第1のカメラから得られ、そしてデバイスのディスプレイ上に表示される。第1のマーカーは、第1のライブ画像において表示される。第1のマーカーは、第1のライブ画像における関心の地点の第1の位置を示す。第1の位置は、デバイスの位置、デバイスの配向および関心の地点の位置に基づく。
【0008】
例えば、本発明は以下の項目を提供する。
(項目1)
ライブ画像において関心の地点をマーク付けるためのコンピュータ実装方法であって、該方法は、
衛星から受信されたナビゲーション信号に基づいてナビゲーションデバイスの位置を決定することと、
該デバイスの配向センサーからのデータに基づいて該デバイスの配向を決定することと、
関心の地点の位置を得ることと、
該デバイスの第1のカメラから第1のライブ画像を得ることと、
該デバイスのディスプレイ上に該第1のライブ画像を表示することと、
該第1のライブ画像において、該第1のライブ画像における該関心の地点の第1の位置を示す第1のマーカーを表示することであって、該第1の位置は、該デバイスの該位置、該デバイスの該配向および該関心の地点の該位置に基づく、ことと、
第2のライブ画像を得ることと、
該デバイスの該ディスプレイ上に該第2のライブ画像を表示することと、
該第2のライブ画像において、該第2のライブ画像における該関心の地点の第2の位置を示す第2のマーカーを表示することであって、該第2の位置は、該デバイスの該位置、該デバイスの該配向および該関心の地点の該位置に基づく、ことと
を含む、方法。
(項目2)
上記第2のライブ画像は、上記第1のライブ画像の第1の視界に実質的に垂直である第2の視界を有する、上記項目に記載の方法。
(項目3)
上記第2のライブ画像を表示することは、上記関心の地点が上記第2の視界内にあることに応答して生じる、上記項目のいずれかに記載の方法。
(項目4)
上記第2のライブ画像を表示することは、ユーザーのコマンドに応答して生じる、上記項目のいずれかに記載の方法。
(項目5)
上記第1のマーカーは、固定部分および可変部分を含み、該固定部分は、上記デバイスから上記関心の地点までの距離に依存しない固定サイズを有し、該可変部分は、GNSSデバイスから該関心の地点までの該距離に基づくサイズを有する、上記項目のいずれかに記載の方法。
(項目6)
上記第1のマーカーは、上記デバイスの上記位置に関連付けられたエラーに依存する色である、上記項目のいずれかに記載の方法。
(項目7)
上記第2のマーカーは、上記デバイスの上記位置に関連付けられたエラーに依存する色である、上記項目のいずれかに記載の方法。
(項目8)
上記第1のマーカーは、上記デバイスと上記関心の地点との間の高度差の表示を含む、上記項目のいずれかに記載の方法。
(項目9)
上記第2のライブ画像は、上記デバイスの第2のカメラから得られる、上記項目のいずれかに記載の方法。
(項目10)
上記関心の地点の上記位置は、上記デバイス内のメモリーから得られる、上記項目のいずれかに記載の方法。
(項目11)
ライブ画像において関心の地点をマーク付けるための実行可能な命令を用いて符号化された非一時的コンピュータ読取可能な媒体であって、該命令は、
衛星から受信されたナビゲーション信号に基づいてナビゲーションデバイスの位置を決定することと、
該デバイスの配向センサーからのデータに基づいて該デバイスの配向を決定することと、
関心の地点の位置を得ることと、
該デバイスの第1のカメラから第1のライブ画像を得ることと、
該デバイスのディスプレイ上に該第1のライブ画像を表示することと、
該第1のライブ画像において、該第1のライブ画像における該関心の地点の第1の位置を示す第1のマーカーを表示することであって、該第1の位置は、該デバイスの該位置、該デバイスの該配向および該関心の地点の該位置に基づく、ことと、
第2のライブ画像を得ることと、
該デバイスの該ディスプレイ上に該第2のライブ画像を表示することと、
該第2のライブ画像において、該第2のライブ画像における該関心の地点の第2の位置を示す第2のマーカーを表示することであって、該第2の位置は、該デバイスの該位置、該デバイスの該配向および該関心の地点の該位置に基づく、ことと
を含む、コンピュータ読取可能な媒体。
(項目12)
上記第2のライブ画像は、上記第1のライブ画像の第1の視界に実質的に垂直である第2の視界を有する、上記項目のいずれかに記載のコンピュータ読取可能な媒体。
(項目13)
上記第2のライブ画像を表示することは、上記関心の地点が上記第2の視界内にあることに応答して生じる、上記項目のいずれかに記載のコンピュータ読取可能な媒体。
(項目14)
上記第2のライブ画像を表示することは、ユーザーのコマンドに応答して生じる、上記項目のいずれかに記載のコンピュータ読取可能な媒体。
(項目15)
上記第1のマーカーは、固定部分および可変部分を含み、該固定部分は、上記デバイスから上記関心の地点までの距離に依存しない固定サイズを有し、該可変部分は、GNSSデバイスから該関心の地点までの該距離に基づくサイズを有する、上記項目のいずれかに記載のコンピュータ読取可能な媒体。
(項目16)
上記第1のマーカーは、上記デバイスの上記位置に関連付けられたエラーに依存する色である、上記項目のいずれかに記載のコンピュータ読取可能な媒体。
(項目17)
上記第2のマーカーは、上記デバイスの上記位置に関連付けられたエラーに依存する色である、上記項目のいずれかに記載のコンピュータ読取可能な媒体。
(項目18)
上記第1のマーカーは、上記デバイスと上記関心の地点との間の高度差の表示を含む、上記項目のいずれかに記載のコンピュータ読取可能な媒体。
(項目19)
上記第2のライブ画像は、上記デバイスの第2のカメラから得られる、上記項目のいずれかに記載のコンピュータ読取可能な媒体。
(項目20)
上記関心の地点の上記位置は、上記デバイス内のメモリーから得られる、上記項目のいずれかに記載のコンピュータ読取可能な媒体。
(項目21)
ライブ画像上に関心の地点の視覚表示を提供するためのナビゲーションデバイスであって、該デバイスは、
第1の視界を有する第1のカメラと、
第2の視界を有する第2のカメラと、
衛星からナビゲーション信号を受信するように構成されたナビゲーションアンテナと、
メモリーであって、該メモリーは、
衛星から受信されたナビゲーション信号に基づいてナビゲーションデバイスの位置を決定することと、
該デバイスの配向センサーからのデータに基づいて該デバイスの配向を決定することと、
関心の地点の位置を得ることと、
該デバイスの第1のカメラから第1のライブ画像を得ることと、
該デバイスのディスプレイ上に該第1のライブ画像を表示することと、
該第1のライブ画像において、該第1のライブ画像における該関心の地点の第1の位置を示す第1のマーカーを表示することであって、該第1の位置は、該デバイスの該位置および該デバイスの該配向に基づく、ことと、
第2のライブ画像を得ることと、
該デバイスの該ディスプレイ上に該第2のライブ画像を表示することと、
該第2のライブ画像において、該第2のライブ画像における該関心の地点の第2の位置を示す第2のマーカーを表示することであって、該第2の位置は、該デバイスの該位置、該デバイスの該配向および該関心の地点の該位置に基づく、ことと
を行う命令を含む、メモリーと、
該命令を実行するように構成されたプロセッサと
を含む、デバイス。
(項目22)
上記第2のライブ画像は、上記第1のライブ画像の第1の視界に実質的に垂直である第2の視界を有する、上記項目のいずれかに記載のデバイス。
(項目23)
上記第2のライブ画像を表示することは、上記関心の地点が上記第2の視界内にあることに応答して生じる、上記項目のいずれかに記載のデバイス。
(項目24)
上記第2のライブ画像を表示することは、ユーザーのコマンドに応答して生じる、上記項目のいずれかに記載のデバイス。
(項目25)
上記第1のマーカーは、固定部分および可変部分を含み、該固定部分は、上記デバイスから上記関心の地点までの距離に依存しない固定サイズを有し、該可変部分は、GNSSデバイスから該関心の地点までの該距離に基づくサイズを有する、上記項目のいずれかに記載のデバイス。
(項目26)
上記第1のマーカーは、上記デバイスの上記位置に関連付けられたエラーに依存する色である、上記項目のいずれかに記載のデバイス。
(項目27)
上記第2のマーカーは、上記デバイスの上記位置に関連付けられたエラーに依存する色である、上記項目のいずれかに記載のデバイス。
(項目28)
上記第1のマーカーは、上記デバイスと上記関心の地点との間の高度差の表示を含む、上記項目のいずれかに記載のデバイス。
(項目29)
上記第2のライブ画像は、上記デバイスの第2のカメラから得られる、上記項目のいずれかに記載のデバイス。
(項目30)
上記関心の地点の上記位置は、上記デバイス内のメモリーから得られる、上記項目のいずれかに記載のデバイス。
【0009】
(摘要)
ナビゲーションデバイス上のライブ画像において関心の地点をマーク付けるための方法が提供される。ナビゲーションデバイスの位置は、衛星から受信されたナビゲーション信号に基づいて決定される。デバイスの配向は、デバイスの配向センサーからのデータに基づいて決定される。第1のライブ画像は、第1のカメラから得られ、そして表示される。第1のマーカーは、第1のライブ画像において表示される。第1のマーカーは、第1のライブ画像における関心の地点の第1の位置を示す。第2のライブ画像が得られ、そして表示される。第2のマーカーは、第2のライブ画像において表示される。第2のマーカーは、第2のライブ画像における関心の地点の第2の位置を示す。第1および第2の位置は、デバイスの位置、デバイスの配向および関心の地点の位置に基づく。
【図面の簡単な説明】
【0010】
【図1】図1は、例示的な携帯GNSSデバイスの透視図を描く。
【図2】図2は、例示的な携帯GNSSデバイスの別の透視図を描く。
【図3】図3は、ユーザーのためのディスプレイスクリーンを含む例示的な携帯GNSSデバイスの背面図を描く。
【図4】図4は、例示的な携帯GNSSデバイスの底面図を描く。
【図5】図5は、例示的な携帯GNSSデバイスの分解図を描く。
【図6】図6は、ステークアウトの間に、視覚ガイダンスを提供するための例示的な技術に対するフローチャートを描く。
【図7】図7は、第1の位置と、第1のマーカーを表示する配向とにおいてGNSSデバイスのスクリーンショットを描く。
【図8】図8は、第2の位置と、第1のマーカーを表示する配向とにおいてGNSSデバイスのスクリーンショットを描く。
【図9】図9は、第3の位置と、第1のマーカーを表示する配向とにおいてGNSSデバイスのスクリーンショットを描く。
【図10】図10は、例示的な第1のマーカーを描く。
【図11】図11は、以下に議論される処理機能のうちの一部または全部を実装するために使われ得る典型的なコンピューティングシステムを例示する。
【発明を実施するための形態】
【0011】
以下の説明は、当業者がさまざまな実施形態を構成し、かつ使用することを可能にするように示される。具体的なデバイス、技術および適用の説明は、単に例として提供される。本明細書に記述される例に対するさまざまな変更は、容易に当業者にとって明白であり、本明細書に規定される一般的な原理は、さまざまな実施形態の真意および範囲から離れることなしに他の例および用途に適用され得る。従って、さまざまな実施形態は、本明細書に記述され、かつ示される例に限定されることが意図されず、特許請求の範囲と矛盾しない範囲に与えられるべきである。
【0012】
本明細書に説明される技術は、GNSSデバイスが、ユーザーがステークアウトを実行することを視覚的に支援することを可能にし得る。関心の地点の位置の視覚表示を関心の地点を含むシーンのライブ画像に提供することによって、以下に説明される技術は、ユーザーがステークアウトを完了する速度を増大させ得る。本明細書に説明される技術が、ステークアウトへの特定の関連性を有するが、この技術は、ステークアウトに限定されず、他のGNSSアプリケーションにおいても有用であり得ることが理解されるべきである。例のGNSSアプリケーションとしてのステークアウトの使用は、限定ではないように構成されるべきである。
【0013】
図1は、例示的な携帯GNSSデバイス100を例示する。携帯GNSSデバイス100は、単一のハウジング102を利用する。いくつかのGNSS構成要素は、ハウジング102と一体であり、それらが、ハウジング内にあり、またはハウジングにしっかりと取り付けられる。しっかりと取り付けられた構成要素は、取り外し可能であり得る。ハウジング102は、ユーザーが典型的なカメラを保持し得る態様に類似して携帯GNSSデバイス100を保持することを可能にする。一例において、ハウジング102は、複数のGNSS衛星によって伝送され、かつ位置を決定するために携帯GNSSデバイス100によって使われる信号を受信し得るGNSSアンテナ502(図5に示される)をカバーするためのGNSSアンテナカバー104を含み得る。GNSSアンテナ502は、ハウジング102と一体であり、それが、ハウジング102内、GNSSアンテナカバー104下にある。
【0014】
一例において、GNSSアンテナ502は、少なくとも4つのGNSS衛星によって伝送される信号を受信し得る。図1によって示される例において、GNSSアンテナカバー104は、携帯GNSSデバイス100の上側面上に位置する。
【0015】
携帯GNSSデバイス100は、ハウジング102と一体の通信アンテナ106のためのカバーをさらに含む。本発明の実施形態において、通信アンテナ106のためのカバーの下に囲まれるGSM(登録商標)、UHF、およびWiFi/Bluetooth(登録商標)アンテナを含むこのような3つの通信アンテナがあり得る。
【0016】
携帯GNSSデバイス100の例示的な分解図が、図5に示される。通信アンテナ506は、カバー106の下に位置決定される。GSM(登録商標)およびUHFアンテナは、単方向のみの通信アンテナであり得る。言い換えると、GSM(登録商標)およびUHFアンテナは、信号を受信するのみのためであって、信号を伝送しないように使われ得る。WiFiアンテナは、双方向通信を可能にし得る。通信アンテナ506は、ベーストランシーバーからの微分補正データまたは未処理の位置決定データのような位置決定支援データを受信する。
【0017】
図1に示される例において、GNSSアンテナカバー104は、ハウジング102の上に位置する。図1の同じ例において、通信アンテナカバー106は、ハウジング102の前面に位置する。
【0018】
携帯GNSSデバイス100は、少なくとも1つのハンドグリップ108をさらに含み得る。図1に示される例において、2つのハンドグリップ108は、ハウジング102に対して一体である。ハンドグリップ108は、快適さのために、そしてユーザーの手の滑りを減少するために、ゴム材料を用いてカバーされ得る。
【0019】
前面カメラ110は、携帯GNSSデバイス100の前面上に位置し得る。底部カメラ116は、図4に示される例において携帯GNSSデバイス100の底面上に位置し得る。カメラは、スチールまたはビデオカメラであり得る。前面カメラ110および底部カメラ116は、同じまたは異なる視界を有し得る。
【0020】
ある実施形態において、ハンドグリップ108はまた、通信アンテナカバー106に近いように位置決定され得る。ハンドグリップ108は、図1におけるように、ユーザーがハンドグリップ108をグリップしているときに、ユーザーがGNSSアンテナ502および通信アンテナ506のアンテナパターンと最小限に干渉する位置に示される。例えば、ユーザーの手は、この構成において、例えば、通信アンテナカバー106の側面に対して後ろかつ離れたハンドグリップ108と共に、ハンドグリップ108をグリップすると同時に、−40dBの干渉より大きくさせない。
【0021】
図2および図3に示されるように、携帯GNSSデバイス100は、ユーザーがデバイスを位置決定することを支援する情報を表示するためのディスプレイ112をさらに含み得る。ディスプレイ112は、液晶(LCD)ディスプレイ、発光ダイオード(LED)ディスプレイ等のような任意の電子ディスプレイであり得る。ディスプレイ112は、ディスプレイ112が入力デバイスとして動作することを可能にするタッチ能力を含み得る。このようなディスプレイデバイスは、当業者によって周知であり、そして任意のこのようなデバイスが使われ得る。図2によって示される例において、ディスプレイ112は、携帯GNSSデバイス100のハウジング102の裏面と一体である。
【0022】
携帯GNSSデバイス100は、静止画像またはビデオを記録するためのカメラをさらに含み得る。このような記録デバイスは、当業者によって周知であり、そして任意のこのようなデバイスが使われ得る。図1に例示される例において、前面カメラ110は、携帯GNSSデバイス100の前側面上に位置する。前面カメラ110の位置決定のさらなる詳細な説明は、米国特許出願公開第2011/0075886号において提供され、上記文献が、全目的のためにその全体として参照することよって本明細書において援用される。一例において、ディスプレイ112は、前面カメラ110の出力を表示するために使われ得る。
【0023】
図4を参照して、携帯GNSSデバイス100はまた、観察し、かつ関心の地点のマーカーを用いる携帯GNSSデバイス100のアラインメントのために携帯GNSSデバイス100の底部上の第2の底部カメラ116を含み得る。関心の地点のマーカーの画像はまた、GNSSデバイス808が、正しく取り付けられていること、または記録されたカメラ情報に基づいて、後にミスアラインメントを補償することを確実にするために、GNSSデータと一緒に記録され得る。
【0024】
携帯GNSSデバイス100は、配向センサー(示されていない)を含み得、配向センサーは、さまざまなタイプのセンサー(例えば、水平センサー、MEMSジャイロスコープ、またはデバイスのための配向データを生成するための磁気コンパス)を含み得る。配向データは、地面に対して携帯GNSSデバイス100および関連付けられた部品(例えば、カメラ110)の配向を記述する。配向データは単独で、またはGNSS位置データおよび画像データ等のさまざまな他のデータと関連して記録され得る。
【0025】
水平センサーは、傾斜計、加速度計等のような任意のタイプの水平センサーであり得る。このような水平センサーは、当業者によって周知であり、任意のこのようなデバイスが使われ得る。一例において、水平センサーの出力の表示は、ディスプレイ112を用いて表示され得る。水平センサーの情報(例えば、ピッチおよびロール)は、GNSSデータと共に記録され得る。水平センサーの情報は、例えば、後にアンテナのミスレベルを補償するために有用であり得る。
【0026】
磁気コンパスは、当業者によって周知であり、任意のこのようなデバイスが使われ得る。磁気コンパスは、携帯GNSSデバイス100の向首方向および方位を決定し得る。磁気コンパスデータは、キャプチャーされた画像と共に記録され得る。磁気コンパスデータは、例えば、前方を向いているカメラから得た画像データの方向を決定するために有用であり得る。
【0027】
MEMSジャイロスコープは、当業者によって周知であり、任意のこのようなデバイスが使われ得る。MEMSジャイロスコープは、携帯GNSSデバイス100の角速度の測定を可能にする。例えば、磁気コンパスの開始方向に基づいて、MEMSジャイロスコープの情報は、デバイスが向いている前方の方向を決定するために使われ得る。MEMSジャイロスコープの情報は、キャプチャーされた画像と共に記録され得る。MEMSジャイロスコープの情報は、例えば、前方を向いているカメラによってキャプチャーされた2つの画像の間の空間的関係を決定するために使われ得る。
【0028】
多くのタイプの配向センサーが上に議論されるが、これらの例は、限定されるものではない。当業者は、他の配向センサーも使われ得ることを理解する。
【0029】
携帯GNSSデバイス100は、直線距離を測定するための距離センサー(示されていない)をさらに含み得る。この距離センサーは、ソナー、レーザー、レーダー等のような任意の距離測定テクノロジーを使用し得る。距離センサーは、GNSSデバイス100周辺の物体への距離を決定するために使われ得る。GNSSデバイス100の底部に取り付けられた場合に、距離センサーは、GNSSデバイス100の地面からの高さも決定し得る。このような距離センサーは、当業者によって周知であり、任意のこのようなデバイスが使われ得る。
【0030】
図4は、本発明の実施形態に従う携帯GNSSデバイス100の底面図を例示する。携帯GNSSデバイス100は、本発明の一部の実施形態において、3つのねじブッシュ114のような取り付け構造によって、三脚またはいくつかの他の支持構造上に取り付けられ得る。
【0031】
図5は、携帯GNSSデバイス100の分解図を例示する。組立されると、GNSSアンテナ502は、GNSSアンテナカバー104によってカバーされ、通信アンテナ506は、通信アンテナカバー106によってカバーされる。受信器508は、GNSSアンテナ502から受信されたGNSS衛星信号を地球ベースの座標(例えば、WG84、ECEF、ENU等)に変換し得る。GNSS受信器508はさらに、一緒に接続されている通信アンテナ506および通信ボード510から受信された位置決定支援データと共に、処理のためのオンボードCPUに座標を送信し得る。
【0032】
図6は、ステークアウトの間に、視覚ガイダンスを提供する例示的な技術のためのフローチャート600を描く。例示的な技術は、GNSSデバイス(例えば、前述のGNSSデバイス100)上に実装されることに適している。
【0033】
例示的な技術のステップ602において、GNSSデバイスは、複数のGNSS衛星から受信された信号に基づいてGNSSデバイスの位置を決定する。GNSS衛星信号に加えて、GNSSデバイスの位置は、基地局から受信された位置決定支援データにも基づき得る。支援信号は、例えば、通信受信器508(図5)によって受信され得る。
【0034】
衛星および基地局からの信号に基づいて位置決定することのさらなる詳細な説明は、2008年2月15日に出願された米国特許出願第12/070,333号において入手可能であり、2009年1月27日に出願された米国特許出願公開第2008/0208454号および第12/360,808号として公開され、本発明の譲受人に譲渡された米国特許出願公開第2009/0189804号として公開される。上記文献の各々は、すべての目的のために、全体として参照することによって本明細書に援用される。
【0035】
例示的な技術のステップ604において、GNSSデバイスは、配向センサーからのデータに基づいてGNSSデバイスの配向を決定する。例えば、デジタルコンパス、ジャイロスコープ、および加速度計のようなセンサーは、配向データ(例えば、磁気方向、パン(pan)、チルト、およびヨーデータ)を提供し得る。他のセンサーも使われ得、他の配向データも生成され得る。
【0036】
例示的な技術のステップ606において、GNSSデバイスは、関心の地点の位置を得る。例えば、GNSSデバイスは、メモリーから位置をロードし得る。位置を得る他の例は、入力デバイス(例えば、キーボードまたはタッチスクリーン)を用いてユーザーから位置を得ることと、通信受信器を用いてデータに無線でアクセスすることとを含むが、それらに限定されない。関心の地点の位置は、関心の地点の位置を識別するためのデータを含む。いくつかの場合において、位置は、関心の地点に対する1組の経度、緯度、および高度の値であり得る。他の場合において、高度データは、経度および緯度、近くの高度、または他の推定方法に基づいて省略または推定され得る。なお他の場合において、位置は、地球ベースの座標(例えば、WGS84、ECEF、ENU等)であり得る。
【0037】
例示的な技術のステップ608において、GNSSデバイスは、第1のカメラから第1のライブ(すなわち、実時間)画像を得る。例えば、前述のGNSSデバイス100を参照して、第1のライブ画像は、カメラ110の視界内に現在存在するシーンであり得る。ライブまたは実時間は、画像が描くものにおいて時間遅延がある可能性を排除しない。
【0038】
例示的な技術のステップ610において、GNSSデバイスは、GNSSデバイスのディスプレイ上に第1のライブ画像を表示する。例えば、前述のGNSSデバイス100を参照して、第1のライブ画像は、ディスプレイ112上に表示され得る。GNSSデバイスのディスプレイは、特定のフレームレート(例えば、毎秒10〜30フレーム)において第1のカメラからの画像を用いて更新され得るが、任意のフレームレートが使われ得る。
【0039】
例示的な技術のステップ612において、GNSSデバイスは、第1の画像において関心の地点の位置を示すディスプレイ上に第1のマーカーを表示する。第1の画像における関心の地点の位置は、ステップ606において得られた関心の地点の位置と、ステップ602において決定されるGNSSデバイスの位置と、(ステップ602および606からの位置から決定される)GNSSデバイスへの関心の地点の距離と、ステップ604において規定されるGNSSデバイスの配向と、第1のカメラの視界とのようなデータに基づいて決定され得る。
【0040】
ステップ612の一例において、関心の地点の3次元位置は、ステップ606からの位置データに基づいて知られる。関心の地点の高度が既知ではない場合において、高度が推定され得るか、または関心の地点が、全ての高度にあると考えられ得る。GNSSデバイスのカメラから得られた画像における(3次元の)視界の内容は、カメラの視界の角度(すなわち、水平ビュー角度および垂直ビュー角度)に基づいて決定され得る。次に、GNSSデバイスの位置と、前面に取り付けられたカメラに対するGNSSデバイスの配向と同じである視界の配向とに基づいて、関心の地点の3次元の位置が視界の3次元範囲内にあるか否かが決定され得る。さらに、画像における関心の地点の近似位置は、同じデータを用いて決定され得る。関心の地点の画像内の位置が近似的であるが、非常に正確であり得ることが理解されるべきである。いくつかの場合において、ゼロでないピクセル寸法のために、画像上の関心の地点の位置は、完全に正確に決定され得る。例えば、0.1ピクセルの精度を有する近似された位置は、エラーのない正確な位置になる。
【0041】
関心の地点が、第1の画像の視界内にない場合、標識(例えば、矢印)が、関心の地点が第1の画像の視界内にあるように、GNSSデバイスが配向される必要がある方向を指示するように表示され得る。
【0042】
第1のマーカーを配置する例として、図7〜9は、それぞれ、3つの異なる位置および配向においてGNSSデバイスによって得られた第1のライブ画像700、800、および900を描く。図7〜9の第1のマーカー702、802および902は、それぞれ、ライブ画像における関心の地点の位置704を示す。一連の第1のライブ画像は、GNSSデバイスがどのように位置決めおよび配向されるか関わらず、第1のマーカーがライブ画像における関心の地点にわたってどのように配置され得るかを例示する。
【0043】
第1のマーカーは、任意数の形態をとり得る。図10は、固定部分1004と可変部分1006と含む例示的な第1のマーカー1002を描く。固定部分1004は、GNSSデバイスから関心の地点までの距離に依存して変化しない1組のサイズであり得る。可変部分1006は、GNSSデバイスから関心の地点までの距離に依存して可変であるサイズであり得る。例えば、図10において描かれるように、可変部分1006は、GNSSデバイスから関心の地点までの距離に従って縮尺されるフラッグであり得る。言い換えると、フラッグは、GNSSデバイスが関心の地点に接近するにつれて大きくなり、GNSSデバイスが関心の地点から離れて行くにつれて小さくなる。GNSSデバイスがいくつかの閾値距離よりも関心の地点からより遠い場合に、フラッグは、非常に小さいとき(例えば、一点または小さいオブジェクト)があり、または全く示されないときもある。
【0044】
例示的な第1のマーカー1002は、GNSSデバイスの位置に関連付けられたエラーの表示を提供するために、色またはいくつかの他の特徴を変化させ得る。例えば、ステップ602において決定されたGNSSデバイスの位置が、リアルタイム・キネマティクス(「RTK」)の固定の解に基づく場合、第1のマーカー1002またはその一部分は、特定の色であり得、例えば、フラッグは、緑色である。同様に、ステップ602において決定されたGNSSデバイスの位置が、RTKの浮動の解に基づく場合、第1のマーカー1002またはその一部分は、別の特定の色であり得、例えば、フラッグは、黄色である。GNSSデバイスが独立型である場合、第1のマーカー1002またはその一部分は、別の特定の色であり得、例えば、フラッグは、赤色である。他の色スキームも使われ得る。
【0045】
第1のマーカーは、他の情報も表示し得る。例えば、GNSSデバイスと関心の地点との間の高度差が表示され得、または他にもGNSSデバイスの外観は、高度差に依存し得る。例えば、第1のマーカーの高さは、GNSSデバイスと関心の地点との間の高度差に依存し得る。関心の地点の高度は、ステップ606において既知であり得る。GNSSデバイスの高度は、ステップ602において既知であり得る。
【0046】
代替的には、GNSSデバイス以下のグラウンドと関心の地点との間の高度差が表示され得、または他にも第1のマーカーの外観は、高等差に依存し得る。例えば、第1のマーカーの高さは、GNSSデバイスと関心の地点との間の高度差に依存し得る。GNSSデバイスの下方のグラウンドの高度は、ステップ606において決定されたGNSSデバイスの位置と、GNSSデバイスがグラウンドから離れている高さに関する情報とに基づいて知られ得る。この高さは、例えば、ユーザーまたはGNSSデバイスの底部に配置された距離センサーから得られ得る。
【0047】
第1のマーカーが特定の例に対して上に議論されたが、第1のマーカーは、他の形態もとり得る。例えば、第1のマーカーは、単に簡単なボールまたはクロスであり得る。第1のマーカーは、より複雑な形態もとり得る。第1のマーカーは、本例示的な技術から逸脱することなしに、幅広いさまざまな特徴を用いて実装され得ることが理解されるべきである。
【0048】
例示的な技術のステップ614において、GNSSデバイスは、第2のカメラから第2のライブ画像を得る。例えば、前述のGNSSデバイス100に関して、第2のライブ画像は、カメラ116の視界において現在存在するシーンであり得る。ステップ614の別の例として、第2のライブ画像は、第1のカメラの光軸が変更された場合、第1のカメラからも得られ得る。例えば、光学系は、第1のカメラの視界を下へ90°で回転するために使われ得る。
【0049】
GNSSデバイスの一例は、それぞれ、第1および第2のライブ画像を生成し、それらは重なる、第1および第2のカメラを含む。別のGNSSデバイスは、別個で重ならない第1および第2のライブ画像をそれぞれ生成する第1および第2のカメラを含み得る。第1および第2のカメラのさまざまな特徴(例えば、ビューおよびカメラ配向)は、第1および第2のライブ画像が重なるか否かに影響し得る。代替的には、第1および第2の画像が重なるか否かは、第1および第2のライブ画像の中でシーンが第1および第2のカメラからどの程度離れているかにも依存し得る。
【0050】
前述のGNSSデバイス100は、第2のカメラの光軸に垂直である光軸を有する第1のカメラを有する。従って、カメラ110が水平線に向けられている間、カメラ116は、GNSSデバイス100の直下のグラウンドに向けられ得る。他のGNSSデバイスは、互いに実質的に垂直である光軸を有するカメラを有し得る(例えば、第1のカメラの光軸が、第2のカメラの光軸に垂直である10°の範囲内にある)。なお他のGNSSデバイスは、互いに対して他の配向を有する光軸を有するカメラを有し、例えば、GNSSデバイスの左右の側面上にカメラを有し得る。
【0051】
例示的な技術のステップ616において、GNSSデバイスは、GNSSデバイスのディスプレイ上に第2のライブ画像を表示する。いくつかの例において、第2のライブ画像は、第1のライブ画像の代わりに表示され得る。他の例において、第2のライブ画像は、第1のライブ画像と同時に表示され得る。例えば、GNSSデバイスのディスプレイは、第1および第2の画像に対して2つの部分に分割され得る。別の例において、GNSSデバイスは、2つのディスプレイを有し得、各ディスプレイは、第1または第2のライブ画像のいずれかを表示する。
【0052】
本例示的な技術において、ステップ616は、第2のライブ画像の視界内にある関心の地点に応答して実行され得る。別の例示的な技術において、ステップ616は、第1のライブ画像の視界から出る関心の地点に応答して実行され得る。別の例示的な技術において、ステップ616は、関心の地点が第2のライブ画像の視界内にあるか否かに関わらず、ユーザーのコマンドに応答して実行され得る。
【0053】
例示的な技術のステップ618において、GNSSデバイスは、第のライブ画像にある第2のマーカーを表示する。第2のマーカーは、第2のライブ画像において関心の地点の位置を示す。位置は、ステップ612に対して前述のような同様な手順を用いて決定され得る。しかしながら、第2のマーカーの形態は、第1のマーカーに対して前述のように同様な形態をとり得る。例えば、第2のマーカーは、第1のマーカーに対して前述したように固定部分および可変部分も有し得る。次に、第2のマーカーは、グラウンド上の物理的マーカーをGNSSデバイスのディスプレイ上の第2のマーカーと整列させることによって、関心の地点を正確にステークアウトするために使われ得る。
【0054】
別の例示的な技術において、ステップ614、616、および618が省略される以外、フローチャート600(図6)と同じステップが実行される。この技術において、1つのカメラのみが必要とされる。
【0055】
図11は、本発明の実施形態における処理機能を実装するために使用され得る典型的なコンピューティングシステム1100を例示する。例えば、このタイプのコンピューティングシステムがクライアントおよびサーバにおいて使われ得る。当業者はまた、他のコンピュータシステムまたは構造を用いて、どのように本発明を実装するかも認識する。コンピューティングシステム1100は、例えば、デスクトップ、ラップトップまたはノートブックコンピュータ、携帯コンピューティングデバイス(PDA、セルフォン、パームトップ等)、マインフレーム、サーバ、クライアント、または所与のアプリケーションまたは環境に対して望ましいかまたは適切であり得る任意の他のタイプの特定または汎用のコンピューティングデバイスを表し得る。コンピューティングシステム1100は、プロセッサ1104のような1つ以上のプロセッサを含み得る。プロセッサ1104は、例えば、マイクロプロセッサ、マイクロコントローラまたは他のコントロール論理のような汎用または特定目的の処理エンジンを用いて実装され得る。この例において、プロセッサ1104は、バス1102または他の通信媒体に接続される。
【0056】
コンピューティングシステム1100は、プロセッサ1104によって実行されるべき情報および命令を格納するための、ランダムアクセスメモリー(RAM)または他の動的メモリーのようなメインメモリー1108も含み得る。メインメモリー1108は、プロセッサ1104によって実行されるべき命令の実行の間に、一時的な変数または他の中間の情報を格納するためにも使われ得る。コンピューティングシステム1100は、同様に、読み取り専用のメモリー(「ROM」)またはプロセッサ1104のための静的情報および命令を格納するための、バス1102に接続される他の静的記憶デバイスを含み得る。
【0057】
コンピューティングシステム1100は、例えば、媒体ドライブ1112および取り外し可能な記憶インターフェース1120を含み得る情報記憶システム1110も含み得る。媒体ドライブ1112は、ハードディスクドライブ、フロッピディスクドライブ、磁気テープドライブ、光学ディスクドライブ、CDまたはDVDドライブ(RまたはRW)、または他の取り外し可能または固定の媒体ドライブのような固定または取り外し可能な記憶媒体をサポートするためのドライブまたは他のメカニズムを含み得る。記憶媒体1118は、例えば、ハードディスク、フロッピディスク、磁気テープ、光学ディスク、CDまたはDVD、または媒体ドライブ1112によって読み取られまた書き込まれる他の固定または取り外し可能な媒体を含み得る。これらの例が例示するように、記憶媒体1118は、コンピュータ読み取り可能な記憶媒体を含み得、記憶媒体がその中に格納された特定のコンピュータソフトウェアまたはデータを有する。
【0058】
代替的な実施形態において、情報記憶システム1110は、コンピュータプログラムまたは他の命令またはデータがコンピューティングシステム1100内にロードされることを可能にするための他の類似な部品を含み得る。このような部品は、例えば、プログラムカートリッジおよびカートリッジインターフェースのような取り外し可能な記憶ユニット1122およびインターフェース1120と、取り外し可能なメモリー(例えば、フラッシュメモリーまたは他の取り外し可能なメモリーモジュール)およびメモリースロットと、ソフトウェアおよびデータが取り外し可能な記憶ユニット1118からコンピューティングシステム1100までに転送されることを可能にする他の取り外し可能な記憶ユニット1122およびインターフェース1120とを含み得る。
【0059】
コンピューティングシステム1100は、通信インターフェース1124も含み得る。通信インターフェース1124は、ソフトウェアおよびデータがコンピューティングシステム1100と外部のデバイスとの間に転送されることを可能にするために使われ得る。通信インターフェース1124の例は、モデム、(Ethernet(登録商標)または他のNICカードのような)ネットワークインターフェース、(例えば、USBポートのような)通信ポート、PCMCIAスロットおよびカード等を含み得る。ソフトウェアと、通信インターフェース1124を介して転送されるデータとは、通信インターフェース1124によって受信されることが可能である電気、電磁気、光学または他の信号であり得る信号の形態である。これらの信号は、チャンネル1128を介して通信インターフェース1124に提供される。このチャンネル1128は、信号を搬送し得、無線媒体、ワイヤまたはケーブル、ファイバー光学系、または他の通信媒体を用いて実装され得る。チャンネルのいくつかの例は、フォンライン、セルラフォンライン、RFライン、ネットワークインターフェース、局所または広いエリアのネットワーク、および他の通信チャンネルを含む。
【0060】
本明細書において、用語「コンピュータプログラム製品」、「コンピュータ読み取り可能な記憶媒体」等は、概して、例えば、メモリー1108、記憶媒体1118、または取り外し可能な記憶ユニット1122のような物理的実体のある媒体を指すために使われ得る。これらの形式および他の形式のコンピュータ読み取り可能な記憶媒体は、プロセッサが特定の動作を実行するようにするために、プロセッサ1104による使用のための1つ以上の命令を格納することにおいて必要とされ得る。概して、(コンピュータプログラムの形で分類され得または他の分類であり得る)「コンピュータプログラムコード」と呼ばれるこのような命令は、実行されるときに、コンピューティングシステム1100が本発明の実施形態の特徴または機能を行うことを可能にする。コードは、直接に、プロセッサに特定の動作を実行させ、それをするようにコンパイルさせられ、またはそれをするように他のソフトウェア、ハードウェア、またはファームウェア要素(例えば、標準機能を実行するためのライブラリ)と組み合わされ得ることを留意する。
【0061】
構成要素がソフトウェアを用いて実装される実施形態において、ソフトウェアは、例えば、取り外し可能な記憶媒体1118、ドライブ1112または通信インターフェース1124を用いて、コンピュータ読み取り可能な記憶媒体内に格納され得、そしてコンピューティングシステム1100内にロードされ得る。コントロール論理(この例において、ソフトウェア命令またはコンピュータプログラムコード)は、プロセッサ1104によって実行されるときに、本明細書に記述されるように、プロセッサ1104に本発明の機能を行わせる。
【0062】
明瞭にするための上記説明が、異なる機能のユニットを参照して本発明の実施形態を説明したことが認識される。しかし、異なる機能のユニット間における機能の任意の適切な配分が、本発明から逸脱することなしに使われ得ることは明白である。従って、具体的な機能ユニットへの参照は、厳密な論理的または物理的構造または組織を表すより、むしろ説明された機能を提供するための適切な手段への参照とみなされ得るだけである。
【0063】
本発明は、ハードウェア、ソフトウェア、ファームウェアまたはそれらの組み合わせを含む任意の適切な形態において実装され得る。本発明の異なる局面は、1つ以上のデータプロセッサまたはデジタル信号プロセッサにおいて作動するコンピュータソフトウェアまたはファームウェアとして少なくとも部分的に実装され得る。本発明の実施形態の要素および部品は、適切な方法で物理的、機能的および論理的に実装され得る。実際は、機能は、単一のユニットにおいて、複数のユニットにおいて、または他の機能ユニットの一部分として実装され得る。このように、本発明は、単一のユニットにおいて実装され得、または異なるユニットおよびプロセッサの間に物理的かつ機能的に配分され得る。
【0064】
本発明は、いくつかの実施形態に関連して説明されたが、本明細書において説明された特定の形態に限定されるものではない。むしろ、本発明の範囲は、請求項のみによって限定される。加えて、特徴が、特定の実施形態に関連して説明されるように見えるが、当業者は、説明された実施形態のさまざまな特徴が本発明に従って組み合わせられ得ることを認識する。さらに、実施形態に関連して説明された本発明の局面は、発明として独立であり得る。
【0065】
さらに、個々に列挙されるが、複数の手段、構成要素、または方法ステップは、例えば、単一のユニットまたはプロセッサによってインプリメントされ得る。さらに、個々の特徴が、異なる請求項内に含まれ得るが、これらは、有利に組み合わせられることが可能であり得、そして異なる請求項の包含は、特徴の組み合わせが実行可能または有利ではないことを暗示しない。また、請求項の1つのカテゴリの特徴の包含は、このカテゴリの限定を暗示しなく、むしろ特徴が、適切のように、他の請求項のカテゴリに同等的に適用可能であり得る。
【0066】
さらに、さまざまな改変および代替物は、本発明の精神および範囲から逸脱することなしに当業者によって加えられ得ることが認識される。本発明は、前述の例示的詳細によって限定されるではなく、むしろ請求範囲従って規定されるべきである。
【特許請求の範囲】
【請求項1】
ライブ画像において関心の地点をマーク付けるためのコンピュータ実装方法であって、該方法は、
衛星から受信されたナビゲーション信号に基づいてナビゲーションデバイスの位置を決定することと、
該デバイスの配向センサーからのデータに基づいて該デバイスの配向を決定することと、
関心の地点の位置を得ることと、
該デバイスの第1のカメラから第1のライブ画像を得ることと、
該デバイスのディスプレイ上に該第1のライブ画像を表示することと、
該第1のライブ画像において、該第1のライブ画像における該関心の地点の第1の位置を示す第1のマーカーを表示することであって、該第1の位置は、該デバイスの該位置、該デバイスの該配向および該関心の地点の該位置に基づく、ことと、
第2のライブ画像を得ることと、
該デバイスの該ディスプレイ上に該第2のライブ画像を表示することと、
該第2のライブ画像において、該第2のライブ画像における該関心の地点の第2の位置を示す第2のマーカーを表示することであって、該第2の位置は、該デバイスの該位置、該デバイスの該配向および該関心の地点の該位置に基づく、ことと
を含む、方法。
【請求項2】
前記第2のライブ画像は、前記第1のライブ画像の第1の視界に実質的に垂直である第2の視界を有する、請求項1に記載の方法。
【請求項3】
前記第2のライブ画像を表示することは、前記関心の地点が前記第2の視界内にあることに応答して生じる、請求項1に記載の方法。
【請求項4】
前記第2のライブ画像を表示することは、ユーザーのコマンドに応答して生じる、請求項1に記載の方法。
【請求項5】
前記第1のマーカーは、固定部分および可変部分を含み、該固定部分は、前記デバイスから前記関心の地点までの距離に依存しない固定サイズを有し、該可変部分は、GNSSデバイスから該関心の地点までの該距離に基づくサイズを有する、請求項1に記載の方法。
【請求項6】
前記第1のマーカーは、前記デバイスの前記位置に関連付けられたエラーに依存する色である、請求項1に記載の方法。
【請求項7】
前記第2のマーカーは、前記デバイスの前記位置に関連付けられたエラーに依存する色である、請求項6に記載の方法。
【請求項8】
前記第1のマーカーは、前記デバイスと前記関心の地点との間の高度差の表示を含む、請求項1に記載の方法。
【請求項9】
前記第2のライブ画像は、前記デバイスの第2のカメラから得られる、請求項1に記載の方法。
【請求項10】
前記関心の地点の前記位置は、前記デバイス内のメモリーから得られる、請求項1に記載の方法。
【請求項11】
ライブ画像において関心の地点をマーク付けるための実行可能な命令を用いて符号化された非一時的コンピュータ読取可能な媒体であって、該命令は、
衛星から受信されたナビゲーション信号に基づいてナビゲーションデバイスの位置を決定することと、
該デバイスの配向センサーからのデータに基づいて該デバイスの配向を決定することと、
関心の地点の位置を得ることと、
該デバイスの第1のカメラから第1のライブ画像を得ることと、
該デバイスのディスプレイ上に該第1のライブ画像を表示することと、
該第1のライブ画像において、該第1のライブ画像における該関心の地点の第1の位置を示す第1のマーカーを表示することであって、該第1の位置は、該デバイスの該位置、該デバイスの該配向および該関心の地点の該位置に基づく、ことと、
第2のライブ画像を得ることと、
該デバイスの該ディスプレイ上に該第2のライブ画像を表示することと、
該第2のライブ画像において、該第2のライブ画像における該関心の地点の第2の位置を示す第2のマーカーを表示することであって、該第2の位置は、該デバイスの該位置、該デバイスの該配向および該関心の地点の該位置に基づく、ことと
を含む、コンピュータ読取可能な媒体。
【請求項12】
前記第2のライブ画像は、前記第1のライブ画像の第1の視界に実質的に垂直である第2の視界を有する、請求項11に記載のコンピュータ読取可能な媒体。
【請求項13】
前記第2のライブ画像を表示することは、前記関心の地点が前記第2の視界内にあることに応答して生じる、請求項11に記載のコンピュータ読取可能な媒体。
【請求項14】
前記第2のライブ画像を表示することは、ユーザーのコマンドに応答して生じる、請求項11に記載のコンピュータ読取可能な媒体。
【請求項15】
前記第1のマーカーは、固定部分および可変部分を含み、該固定部分は、前記デバイスから前記関心の地点までの距離に依存しない固定サイズを有し、該可変部分は、GNSSデバイスから該関心の地点までの該距離に基づくサイズを有する、請求項11に記載のコンピュータ読取可能な媒体。
【請求項16】
前記第1のマーカーは、前記デバイスの前記位置に関連付けられたエラーに依存する色である、請求項11に記載のコンピュータ読取可能な媒体。
【請求項17】
前記第2のマーカーは、前記デバイスの前記位置に関連付けられたエラーに依存する色である、請求項16に記載のコンピュータ読取可能な媒体。
【請求項18】
前記第1のマーカーは、前記デバイスと前記関心の地点との間の高度差の表示を含む、請求項11に記載のコンピュータ読取可能な媒体。
【請求項19】
前記第2のライブ画像は、前記デバイスの第2のカメラから得られる、請求項11に記載のコンピュータ読取可能な媒体。
【請求項20】
前記関心の地点の前記位置は、前記デバイス内のメモリーから得られる、請求項11に記載のコンピュータ読取可能な媒体。
【請求項21】
ライブ画像上に関心の地点の視覚表示を提供するためのナビゲーションデバイスであって、該デバイスは、
第1の視界を有する第1のカメラと、
第2の視界を有する第2のカメラと、
衛星からナビゲーション信号を受信するように構成されたナビゲーションアンテナと、
メモリーであって、該メモリーは、
衛星から受信されたナビゲーション信号に基づいてナビゲーションデバイスの位置を決定することと、
該デバイスの配向センサーからのデータに基づいて該デバイスの配向を決定することと、
関心の地点の位置を得ることと、
該デバイスの第1のカメラから第1のライブ画像を得ることと、
該デバイスのディスプレイ上に該第1のライブ画像を表示することと、
該第1のライブ画像において、該第1のライブ画像における該関心の地点の第1の位置を示す第1のマーカーを表示することであって、該第1の位置は、該デバイスの該位置および該デバイスの該配向に基づく、ことと、
第2のライブ画像を得ることと、
該デバイスの該ディスプレイ上に該第2のライブ画像を表示することと、
該第2のライブ画像において、該第2のライブ画像における該関心の地点の第2の位置を示す第2のマーカーを表示することであって、該第2の位置は、該デバイスの該位置、該デバイスの該配向および該関心の地点の該位置に基づく、ことと
を行う命令を含む、メモリーと、
該命令を実行するように構成されたプロセッサと
を含む、デバイス。
【請求項22】
前記第2のライブ画像は、前記第1のライブ画像の第1の視界に実質的に垂直である第2の視界を有する、請求項21に記載のデバイス。
【請求項23】
前記第2のライブ画像を表示することは、前記関心の地点が前記第2の視界内にあることに応答して生じる、請求項21に記載のデバイス。
【請求項24】
前記第2のライブ画像を表示することは、ユーザーのコマンドに応答して生じる、請求項21に記載のデバイス。
【請求項25】
前記第1のマーカーは、固定部分および可変部分を含み、該固定部分は、前記デバイスから前記関心の地点までの距離に依存しない固定サイズを有し、該可変部分は、GNSSデバイスから該関心の地点までの該距離に基づくサイズを有する、請求項21に記載のデバイス。
【請求項26】
前記第1のマーカーは、前記デバイスの前記位置に関連付けられたエラーに依存する色である、請求項21に記載のデバイス。
【請求項27】
前記第2のマーカーは、前記デバイスの前記位置に関連付けられたエラーに依存する色である、請求項26に記載のデバイス。
【請求項28】
前記第1のマーカーは、前記デバイスと前記関心の地点との間の高度差の表示を含む、請求項21に記載のデバイス。
【請求項29】
前記第2のライブ画像は、前記デバイスの第2のカメラから得られる、請求項21に記載のデバイス。
【請求項30】
前記関心の地点の前記位置は、前記デバイス内のメモリーから得られる、請求項21に記載のデバイス。
【請求項1】
ライブ画像において関心の地点をマーク付けるためのコンピュータ実装方法であって、該方法は、
衛星から受信されたナビゲーション信号に基づいてナビゲーションデバイスの位置を決定することと、
該デバイスの配向センサーからのデータに基づいて該デバイスの配向を決定することと、
関心の地点の位置を得ることと、
該デバイスの第1のカメラから第1のライブ画像を得ることと、
該デバイスのディスプレイ上に該第1のライブ画像を表示することと、
該第1のライブ画像において、該第1のライブ画像における該関心の地点の第1の位置を示す第1のマーカーを表示することであって、該第1の位置は、該デバイスの該位置、該デバイスの該配向および該関心の地点の該位置に基づく、ことと、
第2のライブ画像を得ることと、
該デバイスの該ディスプレイ上に該第2のライブ画像を表示することと、
該第2のライブ画像において、該第2のライブ画像における該関心の地点の第2の位置を示す第2のマーカーを表示することであって、該第2の位置は、該デバイスの該位置、該デバイスの該配向および該関心の地点の該位置に基づく、ことと
を含む、方法。
【請求項2】
前記第2のライブ画像は、前記第1のライブ画像の第1の視界に実質的に垂直である第2の視界を有する、請求項1に記載の方法。
【請求項3】
前記第2のライブ画像を表示することは、前記関心の地点が前記第2の視界内にあることに応答して生じる、請求項1に記載の方法。
【請求項4】
前記第2のライブ画像を表示することは、ユーザーのコマンドに応答して生じる、請求項1に記載の方法。
【請求項5】
前記第1のマーカーは、固定部分および可変部分を含み、該固定部分は、前記デバイスから前記関心の地点までの距離に依存しない固定サイズを有し、該可変部分は、GNSSデバイスから該関心の地点までの該距離に基づくサイズを有する、請求項1に記載の方法。
【請求項6】
前記第1のマーカーは、前記デバイスの前記位置に関連付けられたエラーに依存する色である、請求項1に記載の方法。
【請求項7】
前記第2のマーカーは、前記デバイスの前記位置に関連付けられたエラーに依存する色である、請求項6に記載の方法。
【請求項8】
前記第1のマーカーは、前記デバイスと前記関心の地点との間の高度差の表示を含む、請求項1に記載の方法。
【請求項9】
前記第2のライブ画像は、前記デバイスの第2のカメラから得られる、請求項1に記載の方法。
【請求項10】
前記関心の地点の前記位置は、前記デバイス内のメモリーから得られる、請求項1に記載の方法。
【請求項11】
ライブ画像において関心の地点をマーク付けるための実行可能な命令を用いて符号化された非一時的コンピュータ読取可能な媒体であって、該命令は、
衛星から受信されたナビゲーション信号に基づいてナビゲーションデバイスの位置を決定することと、
該デバイスの配向センサーからのデータに基づいて該デバイスの配向を決定することと、
関心の地点の位置を得ることと、
該デバイスの第1のカメラから第1のライブ画像を得ることと、
該デバイスのディスプレイ上に該第1のライブ画像を表示することと、
該第1のライブ画像において、該第1のライブ画像における該関心の地点の第1の位置を示す第1のマーカーを表示することであって、該第1の位置は、該デバイスの該位置、該デバイスの該配向および該関心の地点の該位置に基づく、ことと、
第2のライブ画像を得ることと、
該デバイスの該ディスプレイ上に該第2のライブ画像を表示することと、
該第2のライブ画像において、該第2のライブ画像における該関心の地点の第2の位置を示す第2のマーカーを表示することであって、該第2の位置は、該デバイスの該位置、該デバイスの該配向および該関心の地点の該位置に基づく、ことと
を含む、コンピュータ読取可能な媒体。
【請求項12】
前記第2のライブ画像は、前記第1のライブ画像の第1の視界に実質的に垂直である第2の視界を有する、請求項11に記載のコンピュータ読取可能な媒体。
【請求項13】
前記第2のライブ画像を表示することは、前記関心の地点が前記第2の視界内にあることに応答して生じる、請求項11に記載のコンピュータ読取可能な媒体。
【請求項14】
前記第2のライブ画像を表示することは、ユーザーのコマンドに応答して生じる、請求項11に記載のコンピュータ読取可能な媒体。
【請求項15】
前記第1のマーカーは、固定部分および可変部分を含み、該固定部分は、前記デバイスから前記関心の地点までの距離に依存しない固定サイズを有し、該可変部分は、GNSSデバイスから該関心の地点までの該距離に基づくサイズを有する、請求項11に記載のコンピュータ読取可能な媒体。
【請求項16】
前記第1のマーカーは、前記デバイスの前記位置に関連付けられたエラーに依存する色である、請求項11に記載のコンピュータ読取可能な媒体。
【請求項17】
前記第2のマーカーは、前記デバイスの前記位置に関連付けられたエラーに依存する色である、請求項16に記載のコンピュータ読取可能な媒体。
【請求項18】
前記第1のマーカーは、前記デバイスと前記関心の地点との間の高度差の表示を含む、請求項11に記載のコンピュータ読取可能な媒体。
【請求項19】
前記第2のライブ画像は、前記デバイスの第2のカメラから得られる、請求項11に記載のコンピュータ読取可能な媒体。
【請求項20】
前記関心の地点の前記位置は、前記デバイス内のメモリーから得られる、請求項11に記載のコンピュータ読取可能な媒体。
【請求項21】
ライブ画像上に関心の地点の視覚表示を提供するためのナビゲーションデバイスであって、該デバイスは、
第1の視界を有する第1のカメラと、
第2の視界を有する第2のカメラと、
衛星からナビゲーション信号を受信するように構成されたナビゲーションアンテナと、
メモリーであって、該メモリーは、
衛星から受信されたナビゲーション信号に基づいてナビゲーションデバイスの位置を決定することと、
該デバイスの配向センサーからのデータに基づいて該デバイスの配向を決定することと、
関心の地点の位置を得ることと、
該デバイスの第1のカメラから第1のライブ画像を得ることと、
該デバイスのディスプレイ上に該第1のライブ画像を表示することと、
該第1のライブ画像において、該第1のライブ画像における該関心の地点の第1の位置を示す第1のマーカーを表示することであって、該第1の位置は、該デバイスの該位置および該デバイスの該配向に基づく、ことと、
第2のライブ画像を得ることと、
該デバイスの該ディスプレイ上に該第2のライブ画像を表示することと、
該第2のライブ画像において、該第2のライブ画像における該関心の地点の第2の位置を示す第2のマーカーを表示することであって、該第2の位置は、該デバイスの該位置、該デバイスの該配向および該関心の地点の該位置に基づく、ことと
を行う命令を含む、メモリーと、
該命令を実行するように構成されたプロセッサと
を含む、デバイス。
【請求項22】
前記第2のライブ画像は、前記第1のライブ画像の第1の視界に実質的に垂直である第2の視界を有する、請求項21に記載のデバイス。
【請求項23】
前記第2のライブ画像を表示することは、前記関心の地点が前記第2の視界内にあることに応答して生じる、請求項21に記載のデバイス。
【請求項24】
前記第2のライブ画像を表示することは、ユーザーのコマンドに応答して生じる、請求項21に記載のデバイス。
【請求項25】
前記第1のマーカーは、固定部分および可変部分を含み、該固定部分は、前記デバイスから前記関心の地点までの距離に依存しない固定サイズを有し、該可変部分は、GNSSデバイスから該関心の地点までの該距離に基づくサイズを有する、請求項21に記載のデバイス。
【請求項26】
前記第1のマーカーは、前記デバイスの前記位置に関連付けられたエラーに依存する色である、請求項21に記載のデバイス。
【請求項27】
前記第2のマーカーは、前記デバイスの前記位置に関連付けられたエラーに依存する色である、請求項26に記載のデバイス。
【請求項28】
前記第1のマーカーは、前記デバイスと前記関心の地点との間の高度差の表示を含む、請求項21に記載のデバイス。
【請求項29】
前記第2のライブ画像は、前記デバイスの第2のカメラから得られる、請求項21に記載のデバイス。
【請求項30】
前記関心の地点の前記位置は、前記デバイス内のメモリーから得られる、請求項21に記載のデバイス。
【図1】



【図2】

【図3】

【図4】

【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2013−102421(P2013−102421A)
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−210896(P2012−210896)
【出願日】平成24年9月25日(2012.9.25)
【公序良俗違反の表示】
特許法第64条第2項第4号の規定により図面の一部または全部を不掲載とする。
【出願人】(510001320)ジャバド ジーエヌエスエス, インコーポレイテッド (8)
【Fターム(参考)】
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願番号】特願2012−210896(P2012−210896)
【出願日】平成24年9月25日(2012.9.25)
【公序良俗違反の表示】
特許法第64条第2項第4号の規定により図面の一部または全部を不掲載とする。
【出願人】(510001320)ジャバド ジーエヌエスエス, インコーポレイテッド (8)
【Fターム(参考)】
[ Back to top ]