
視覚障害者用歩行支援装置
【課題】位置確認用の固定タグを用いた視覚障害者用歩行支援において、視覚障害者に位置認識のずれが生じにくい視覚障害者用歩行支援装置を提供する。
【解決手段】視覚障害者誘導用ブロック8に太陽電池ユニット3を電力供給源とするアクティブ型RFIDタグを固定タグ1として組み込み、あわせて音等による設置場所識別出力を行う。固定タグ1は視覚障害者が携帯している移動タグからのプローブ信号に応答し、埋設されている地点の場所情報コード等を移動タグに送信すると共に音や光を出力する。視覚障害者が携帯している移動タグは、前記場所情報コード等を受信し、その情報を音声等で出力する。視覚障害者は携帯している移動タグが固定タグの存在場所の近傍にあることが判断できるとともに、足の触覚で視覚障害者誘導用ブロックに組み込まれた固定タグの埋設地点であることを確認できる。
【解決手段】視覚障害者誘導用ブロック8に太陽電池ユニット3を電力供給源とするアクティブ型RFIDタグを固定タグ1として組み込み、あわせて音等による設置場所識別出力を行う。固定タグ1は視覚障害者が携帯している移動タグからのプローブ信号に応答し、埋設されている地点の場所情報コード等を移動タグに送信すると共に音や光を出力する。視覚障害者が携帯している移動タグは、前記場所情報コード等を受信し、その情報を音声等で出力する。視覚障害者は携帯している移動タグが固定タグの存在場所の近傍にあることが判断できるとともに、足の触覚で視覚障害者誘導用ブロックに組み込まれた固定タグの埋設地点であることを確認できる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、視覚障害者誘導用ブロックに組み込まれたアクティブ型RFID(Radio Frequency Identification)タグを用いて視覚障害者に対して歩行支援を行う装置に関するものである。
【背景技術】
【0002】
視覚障害者を歩行支援する場合、視覚障害者が現在どこの場所に居るかを認知させることが重要である。従来のこの種の装置は電池を持たないパッシブ型RFIDタグ用い、それの設置されている緯度、経度等の場所に関する現在位置情報を内蔵して固定タグとして道路等に埋設する。視覚障害者が持ち歩く白杖の先端に内蔵されたRFIDリーダ・ライタ等の外部装置からの電波信号に応じて、前記場所に関する現在位置情報を、前記外部装置からの電波を電源とする固定タグから発信することにより設置場所を確認する方法が記載されている(例えば特許文献1参照。)。
【0003】
また電池を持ったアクティブ型RFIDタグである移動タグと、道路等に埋設されたアクティブ型RFIDタグである固定タグとが無線を使って通信し、移動タグからの無線によるプローブ信号に対し、固定タグが埋設してある場所の情報を無線により返信することにより場所を確認する方法がある(例えば特許文献2参照。)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】 特開2005−274245号公報
【0005】
【特許文献2】 特開2007−147445号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし特許文献1に記載された方法ではリーダ・ライタから供給される無線電力を用いるパッシブ型RFIDタグであり、通信距離が数cmしかなく、視覚障害者が歩行しながら杖の先端でRFIDタグの埋設位置を探すことは現実的に困難であった。
【0007】
視覚障害者向け歩行支援に使用するには視覚障害者の歩行速度等を考慮すると、通信距離を2m程度の範囲に制限するのが実用的である。これを狭めると、歩行速度に追従できなくなり埋設地点を通り過ぎてしまうという問題点があった。また広くすると、数m手前で反応してしまい埋設地点の精度が出なくなるといった問題点があった。特許文献2に記載された様な無線を用いた場合、通信距離を2m程度に制限することは困難であった。
【0008】
視覚障害者は目視による位置の特定ができないので、位置認識にずれが生じると歩道から交差点側にはみ出してしまったり階段に躓いたりしてしまうという問題点があった。
【0009】
電池等を電源とするアクティブ型RFIDタグは道路に埋設する場合、タグの動作に必要な電源の確保が問題であった。これの一つの解決方法は太陽電池による方法がある。しかし太陽電池は日照時間や周囲温度等に影響されて、その充電量が変動する。タグの動作は電波で行うため、タグが正常に動作しているか否かを目視等によって確認することは困難であった。
【課題を解決するための手段】
【0010】
本発明による固定タグは、太陽電池を電力供給源とし、場所情報コードを内蔵し、移動タグからの無線によるプローブ信号に応答して前記場所情報コードを無線により発信するアクティブ型RFIDタグで、前記太陽電池、前記固定タグが視覚障害者誘導用ブロックに組み込まれていることを特徴とする。
【0011】
本発明による固定タグは、太陽電池を電力供給源とし、場所情報コードを内蔵し、音による場所識別機能を持ち、移動タグからの無線によるプローブ信号に応答して前記場所情報コードを無線により発信するアクティブ型RFIDタグで、前記場所情報コードを発信すると共に音による場所識別信号を出力し、前記太陽電池、前記固定タグが視覚障害者誘導用ブロック内に組み込まれていることを特徴とする。
【0012】
本発明による固定タグは、太陽電池を電力供給源とし、場所情報コードを内蔵し、光による場所識別機能を持ち、移動タグからの無線によるプローブ信号に応答して前記場所情報コードを無線により発信するアクティブ型RFIDタグで、前記場所情報コードを発信すると共に光による場所識別信号を出力し、前記太陽電池、前記固定タグが視覚障害者誘導用ブロック内に組み込まれていることを特徴とする。
【0013】
本発明による固定タグは、太陽電池を電力供給源とし、場所情報コードを内蔵し、振動による場所識別機能を持ち、移動タグからの無線によるプローブ信号に応答して前記場所情報コードを無線により発信するアクティブ型RFIDタグで、前記場所情報コードを発信すると共に振動による場所識別信号を出力し、前記太陽電池、前記固定タグが視覚障害者誘導用ブロック内に組み込まれていることを特徴とする。
【発明の効果】
【0014】
本発明よれば視覚障害者向けに埋設されている視覚障害者誘導用ブロックに太陽電池を電力供給源とするアクティブ型RFIDタグを固定タグとして組み込み、あわせて音等による設置場所識別出力を行う。固定タグは視覚障害者が携帯している移動タグからのプローブ信号に応答し、埋設されている地点の場所情報コード等を移動タグに送信すると共に音や光を出力する。視覚障害者が携帯している移動タグは、前記場所情報コード等を受信し、その情報を音声等で出力する。このことにより視覚障害者は携帯している移動タグが固定タグの存在場所の近傍にあることが判断できるとともに、足の触覚で視覚障害者誘導用ブロックに組み込まれた固定タグの埋設地点であることを確認できる。または視覚障害者は視覚障害者誘導用ブロック上に居なくても、固定タグが出力する音を聴覚で確認することにより、両耳から固定タグの埋設地点の方向の確認ができまた聞こえてくる音の音量で埋設されている固定タグまでの距離を確認できる。加えて固定タグが発する振動により、視覚障害者は足の触覚で複数ある視覚障害者誘導用ブロックうち、それが何処にあるかを特定することが可能になる。
【0015】
あるいは固定タグが出力するLED等の表示により、視覚障害者と一緒に歩行するガイドの人にその埋設地点を知らせることができるとともに視覚によりそのアクティブ型RFIDタグが正常に動作していることが判断できる。光による出力は全盲の障害者に認識することは無理であるが、弱視の視覚障害者なら認識可能であるので、固定タグの埋設されている絶対位置確認が可能となる。
【発明を実施するための最良の形態】
【0016】
以下、本発明の実施形態について図面を参照して説明する。
【0017】
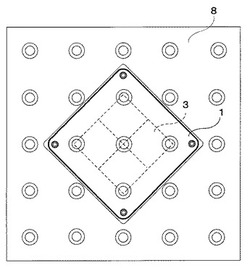
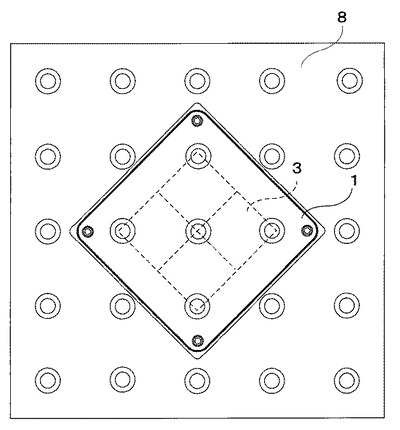
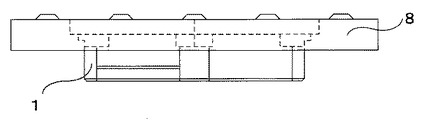
図1、図2は本発明の実施例を示すそれぞれ平面図、側面図である。ここで1は固定タグ、3は固定タグ1に内蔵された太陽電池ユニット、8は固定タグ1が組み込まれた視覚障害者誘導用ブロックである。
【0018】
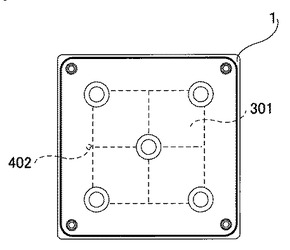
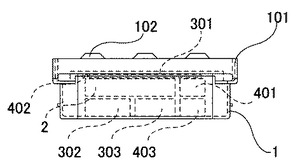
図3、図4は本発明の実施例の視覚障害者誘導用ブロック8に内蔵される固定タグ1のそれぞれ平面図、側面図である。ここで1は固定タグ、2は固定タグ本体、301は太陽電池、302は電源制御回路、303は二次電池、401はスピーカ、402はLED、403は振動機器、101は固定タグ1の外側のアルミダイキャスト、102は固定タグ1の表面に視覚障害者誘導用ブロック用の点状突起を持つアクリル板である。
【0019】
固定タグ1は外部をアルミダイキャスト101で構成され、上面は視覚障害者誘導用ブロックの点状突起持つアクリル板102でおおわれている。アクリル板102は道路上に設置されるので、上からの耐荷重は1トン/平方センチメートル以上の強度をもち、また内部の太陽電池301の発電のために、光を通過する材質でできており四辺をネジで固定されている。固定タグ1は、雨水の浸水を防ぐため防水構造になっている。
【0020】
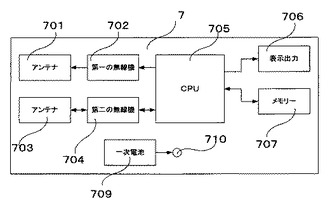
図12、図13従来のそれぞれ固定タグのブロック図、移動タグのブロック図である。
【0021】
図5、図6は本発明の実施例を示すそれぞれ固定タグのブロック図、移動タグのブロック図である。この図における符号は図3、図4の符号と同じである。
【0022】
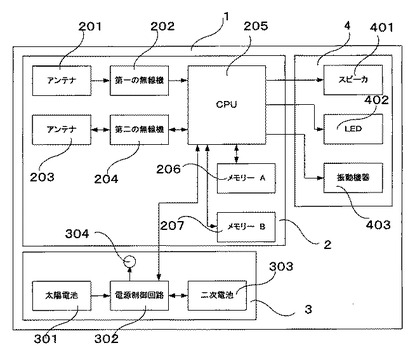
図5において、1は固定タグ、2は固定タグ本体、3は太陽電池ユニット、4は表示装置ユニット、201、203はアンテナ、202は例えば電波法施行規則に規定する微弱無線等による第一の無線機、204は例えば電波法施行規則に規定する特定小電力無線等による第二の無線機、205はCPU、206、207はそれぞれメモリーA、メモリーB、301は太陽電池、302は電源制御回路、303は充放電可能な二次電池、304は電源制御回路302からの電源供給出力、401はスピーカ、402はLED、403は振動機器である。
【0023】
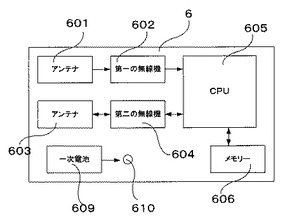
図6において、5は移動タグ、501、503はアンテナ、502は例えば電波法施行規則に規定する微弱無線等による第一の無線機、504は例えば電波法施行規則に規定する特定小電力無線等による第二の無線機、505はCPU、506は情報出力、507、508はそれぞれメモリーA、メモリーB、509は一次電池、510は一次電池509からの電源供給出力である。
【0024】
固定タグ1は図5に示すように、太陽電池ユニット3から電源供給を受ける。図3、図4に示すように、道路等に埋設された固定タグ1のアクリル板102を通して入射された太陽光は太陽電池301にあたり、太陽電池301で発電される。発電された電気は、電源制御回路302により二次電池303に充電される。また充電された電気は、電源制御回路302を通じて、電源供給出力304を介して固定タグ1を構成する回路に供給される。
【0025】
図5、図6および図12、図13を用いて従来のタグと本発明によるタグの違いを説明する。図5、図6および図12、図13の動作において、移動タグからプローブ信号を発信し、固定タグの場所情報コードを得る動作は従来の方法も本発明の方法も同じである。
【0026】
まず、移動タグからプローブ信号発信を発信し、固定タグの場所情報コードを得る動作を説明する。
【0027】
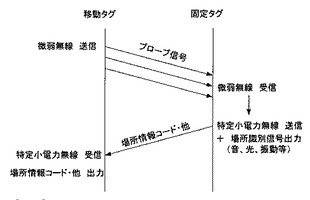
図7は本発明の実施例を示す固定タグと移動タグの情報の流れを示す概略図である。まず固定タグ1のメモリーA206には、固定タグ1の動作に必要なプログラムが、メモリーB207には固定タグ1の埋設地点の緯度、経度、高さ等のデータで構成される場所情報コードおよび埋設地点の情報、たとえば交差点の手前等、が予め記録されている。同様に移動タグ5のメモリーA507には移動タグ5の動作に必要なプログラムが記録されている。
【0028】
図5、図7にあるように、移動タグ5は第一の無線機502からプローブ信号を送信する。これはメモリーA507のプログラムによりCPU505が動作して、第一の無線機502からアンテナ501を介して一定周期で送出される。移動タグ5に必要な電源は一次電池509から、電源供給出力510を介して供給される。
【0029】
移動タグ5から送信されたプローブ信号を固定タグ1は、アンテナ201、第一の無線機202を介して受信し、CPU205に伝送される。CPU205はメモリーA206のプログラムにより動作している。プローブ信号を受信したCPU205は、メモリーB207に記録されている場所情報コードや必要に応じてその地点の温度等の情報を、第二の無線機204、アンテナ203を介して送信する。
【0030】
固定タグ1から送信された場所情報コード等の情報は、移動タグ5のアンテナ503、第二の無線機504を介して受信され、CPU505に伝達され、CPU505は前記情報をメモリーB508に記録するとともに、情報出力506を介して外部機器(図示せず)に受信した場所情報コードを出力する。
【0031】
視覚障害者は目で確認することができないので、得られた場所情報は音声表示等で確認する。この方法は、予め場所情報コードに対応した情報、たとえば「交差点です。」、「右方向の曲がり角です。」、「階段の手前です。」といった情報をサーバに格納し、この情報をインターネット等の通信手段により外部機器にダウンロードしておき、移動タグから得られた場所情報コードと対比することにより当該地点の情報を出力することができる。移動タグにこの機能を内蔵することも可能である。
【0032】
視覚障害者の歩行支援に必要な場所認識範囲はピンポイントが理想であるが、視覚障害者が固定タグの埋設地点上を歩行するとは限らないので、ある程度の範囲でその存在位置を知らせる必要がある。その範囲は半径約2mと考えられる。
【0033】
以上説明したプローブ信号送信から場所情報コード等の出力過程は図12、図13にある従来の固定タグ6および移動タグ7と同じである。
【0034】
図12、図13における第一の無線機702は電波法で送信出力が規定されており、その通信距離は数m〜数10mである。また第二の無線機604も電波法で送信電力が規定されており、その通信距離は数10m〜数100mである。
【0035】
現在のこの種の第一の無線機と第二の無縁機を用いた位置認識機システムでは、現在位置確認の範囲は半径約2mに限定することが困難である。
【0036】
以下従来の方法の問題点と解決すべき課題を説明する。
【0037】
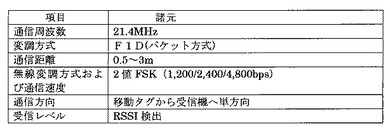
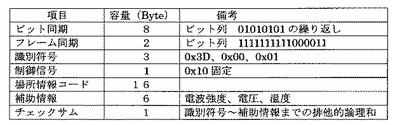
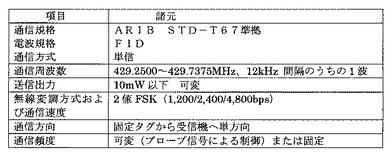
図8、図9に本発明の第一の無線機のそれぞれ無線仕様例、伝送する情報の仕様例を示す。ここでプローブ信号の情報量は最大29Byte(232bit)であるので、伝送に要する通信時間は通信速度が4,800bpsの場合約49m秒である。これと通信同期に必要な時間(プリアンブル送信時間)10m秒を含めると、移動タグから固定タグへのセンシング時間は59m秒である。
【0038】
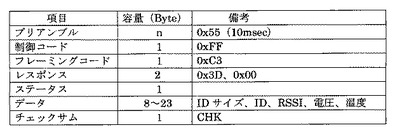
図10、図11に本発明の第二の無線機のそれぞれ無線仕様例、伝送する情報の仕様例を示す。ここで固定タグから移動タグへの確認情報の情報量は37Byte(296bit)であるので、通信速度が4,800bpsの場合伝送に要する通信時間は約62m秒である。
【0039】
従って場所情報センシング時間は59+62=約120m秒掛かる。移動タグが場所情報コードを取得してから、これに関する位置情報を照合して音声等で出力するまでの時間を約500m秒とすると、アクセス時間は全体で約620m秒掛かる。歩行速度を時速4kmとすると、その間の移動距離は69cmになる。
【0040】
上記は通信速度が4,800bpsの場合であるが、これが1,200bpsの場合だと移動タグから固定タグへのセンシング時間は、10+49×4=約300m秒。また固定タグからの通信時間は62×4=約250m秒となり、アクセス時間は1,050m秒となる。時速4kmで歩くと移動距離は117cmになる。
【0041】
視覚障害者にとって固定タグの埋設地点から場所情報コードの入手する場所までの距離は問題である。目安としては半径2m程度であるが、この範囲でも交差点では道路にはみ出てしまう。またT字路等では前面の壁にぶつかってしまう。あるいは階段の所でつまずいてしまうといった身に危険が及ぶ範囲である。また前述した様に場所情報を取得する間に0.7〜1.2mも歩いてしまうので、場所の絶対位置把握が課題である。
【0042】
次に、本発明による方法の効果を説明する。
【0043】
第一の無線機502の送信電力とアンテナ501の指向性を調節して、プローブ信号の通信範囲を2m以下に限定する。
【0044】
応答情報を送信する第二の無線機204の送信出力およびアンテナ203の指向性を調節して、通信範囲を3m程度にする。
【0045】
場所確認を限定するために、センシング信号であるプローブ信号の送信範囲を2m以下と狭め、応答情報の送信範囲は電波の伝播損失も考え3m程度の通信距離を確保した。このことにより視覚障害者が歩行しながら、その場所の確認に要する範囲を半径約2mに制限することが可能となった。
【0046】
本発明によると視覚障害者誘導用ブロックに固定タグを内蔵し、また固定タグに音、光、振動といった場所認識出力を追加することによって、半径2mの範囲をさらに特定することが可能となる。
【0047】
本発明によると、図1にあるように固定タグ1が視覚障害者誘導用ブロック8に内蔵されているので、視覚障害者は移動タグ5からの確認音とともに視覚障害者誘導用ブロックの点状突起を足の触覚で確認することにより、固定タグ1の存在位置を確認することができる。このことにより、移動タグ5の確認音だけでは正確でなかった固定タグ1の設置場所を認識することが可能になるという効果がある。
【0048】
視覚障害者誘導用ブロック8はJIS(日本工業規格)T9251に定められており、約300×300mmの大きさの道路に敷設する設備である。一般的に道路に設備を埋設するには、道路管理者の許可を得なければならない。視覚障害者誘導用ブロックは「高齢者、身体障害者等が円滑に利用できる特定建築物の建築の促進に関する法律」(略称:ハートビル法)や「高齢者、身体障害者等の公共交通機関を利用した移動の円滑化の促進に関する法律」(略称:交通バリアフリー法)で設置が推進されており、視覚障害者に対する支援設備として認められている。このことは視覚障害者誘導用ブロック8に内蔵されている固定タグ1は道路管理者の許可を得やすいと言う利点もある。また既に設置されている視覚障害者誘導用ブロックを固定タグ組み込み型に置き換えることで、工事の単純化ができる利点もある。
【0049】
本発明によると、図5および図7にあるように、固定タグ1がプローブ信号を受信して場所情報コード等を発信する際に、これに応じてスピーカ401から信号音等を出力する。これはCPU205が移動タグ5からのプローブ信号を検知し、固定タグ1に場所情報コード等を送信する時に応じて、表示装置4に信号を出力する。この信号により表示装置4は、スピーカ401の音出力、LED402の光出力、振動装置403の振動出力のいずれか一つ以上を出力する。
【0050】
視覚障害者にとって移動タグ5からの音による情報を聞いた際に、固定タグ1から出力された音も聴取できれば、固定タグ1からの音の発信源を両耳で聞くことにより固定タグ1の方向と固定タグ1までの距離とが確認できる。このことにより固定タグ1が、前方にあるのか、行き過ぎて後方にあるのか、右方向なのか、左方向なのかが判断できる。また両耳から聞こえる音量で、大凡の距離を判断できる。このことにより視覚障害者は歩いてきた方向と現在位置情報と固定タグ埋設場所識別の情報とで、より確実な位置判断が可能となる効果がある。
【0051】
視覚障害者にとって移動タグ5からの音による情報を聞いた際に、固定タグ1から出力された振動を足の感覚で認識できれば、複数ある視覚障害者誘導用ブロックの中でどの視覚障害者誘導用ブロックに固定タグ1があるのかを認識できる。このことにより視覚障害者は歩いてきた方向と現在位置情報と固定タグ埋設地点の情報とで、より確実な位置判断が可能となる効果がある。
【0052】
視覚障害者をサポートするガイドにとって固定タグ1から出力された光を認識することで、固定タグ1の設置場所が認識でき位置の確認が確実になる。特に光による表示は、夜間等で有用である。また全盲の視覚障害者には無理であるが、弱視の視覚障害者に対して、光のよる確認は有効である。
【0053】
太陽電池を電源とする機器において、その充電量は日照時間や周囲温度等により変動する。とくに道路に埋設された機器は、その確認手段が必要になる。本発明によれば、電波は目に見えないがスピーカ401の音、LED402の光、振動機器403による振動等はそれぞれ、人間の聴覚、視覚、触覚で確認することができる。このため専用の機器を用いて確認することなく、固定タグ1が正常に動作をしていることが認識できるという効果がある。このことは太陽電池を用いている装置に関して有用な手段となる。
【0054】
固定タグ1から出力される音、光、振動の表示パターンを変化させることにより固定タグ1の情報を表示することができる。例えば、電池が十分あれば「ピッ、ピッ、ピッ」、動作はできるが充電が足りない場合は、「ピピピッ」等の情報表示ができる。
【0055】
道路等に埋設された固定タグ1の保守方法は重要である。やたら掘り返すことは手間であり、費用が掛かるからである。これに対して図5の第二の無線204は送受信機能をもつことができる。これを使えば、外部の保守用無線機器(図示せず)より、アンテナ203、第二の無線機204、CPU205を介して、メモリーA206に記録されているCPU205のプログラムを書き換えることができる。こうすることにより固定タグ1を掘り返すことなく保守することができる。
【0056】
図7において、固定タグ1から出力される情報は緯度、経度、高さを示す場所情報コードのほかに、例えば内蔵する電池の電圧、周囲温度、設置場所情報コード(交差点、曲がり角、階段等)が考えられる。前述の電圧や周囲温度情報は、固定タグ1の保守等に活用できる。また後述の設置場所情報コードは、受信した場所情報コードに対応して移動タグ5に予め録音されている、「交差点です」、「曲がり角です」、「階段です」等の情報を対比して音声による情報出力が可能である。移動タグ5のメモリーB207に予めこの情報を記録しておけばサーバ等から通信網を介して場所情報内容をダウンロードすることなく、移動タグ5が独立に設置場所内容を表示することができる。
【0057】
視覚障害者にとって絶対位置の把握は重要である。通いなれた道ならばそこが曲がり角なのか、階段なのか、交差点なのかのポイントが把握できれば通常の歩行が可能になる。これは移動タグを送信機能のみとし、移動タグからのセンシング信号であるプローブ信号を定期的に送信し、このプローブ信号を受信した固定タグは音を表示することで可能である。固定タグが表示する音が、例えば交差点なら「ピッ、ピッ、ピー」、階段なら「ピッ、ピー」、曲がり角なら「ピッ、ピッ、ピッ」の様にその場所に応じて変化させることにより、より正確に場所を把握することができる。このことは移動タグや固定タグが独立に機能することができる。
【0058】
説明では、移動タグ、固定タグの無線機に第一の無線機、第二の無線機を用いた方法を行ったが、これを一つの無線機で行うことも可能である。これは移動タグの無線機の送信出力を通信範囲が2m以下とし、固定タグの無線機の送信出力を通信範囲3m程度とすればよい。
【0059】
図1、図2では固定タグ1を視覚障害者誘導用ブロック8に組み込んだが、固定タグの表面を約300×300mmとし、その表面構造をJIS T9251で定められている点状突起構造にしても、本発明による効果は同じである。
【0060】
同じく図1、図2ではその表面構造を、点状突起として説明したが、JIS T9251には点状突起と線状突起が定められている。このどちらの構造においても、本発明による効果は同じである。これは、固定タグの表面を約300×300mmとして、その構造をJIS T9251に規定されている構造にした場合も同様である。
【図面の簡単な説明】
【図1】本発明の実施例を示す平面図
【図2】本発明の実施例を示す側面図
【図3】本発明の実施例を示す固定タグの平面図
【図4】本発明の実施例を示す固定タグの側面図
【図5】本発明の実施例を示す固定タグのブロック図
【図6】本発明の実施例を示す移動タグのブロック図
【図7】本発明の実施例を示す固定タグと移動タグ間の情報の流れを示す概略図
【図8】本発明の第一の無線機の無線仕様例
【図9】本発明の第一の無線機の伝送する情報の仕様例
【図10】本発明の第二の無線機の無線仕様例
【図11】本発明の第二の無線機の伝送する情報の仕様例
【図12】従来の固定タグのブロック図
【図13】従来の移動タグのブロック図
【符号の説明】
1 固定タグ
2 固定タグ本体
3 太陽電池ユニット
4 表示装置ユニット
5 移動タグ
6 従来の固定タグ
7 従来の移動タグ
8 視覚障害者誘導用ブロック
101 アルミダイキャスト
102 アクリル板
201、203、501、503、601、603、701、703 アンテナ
202、502、602、702 第一の無線機
204,504、604、704 第二の無線機
205、505、605、705 CPU
206、507 メモリー A、
207、508 メモリー B
301 太陽電池
302 電源制御回路
303 二次電池
304、510、610、710 電源供給出力
401 スピーカ
402 LED
403 振動機器
506 情報出力
509、609、709 一次電池
606、707 メモリー
706 表示出力
【技術分野】
【0001】
本発明は、視覚障害者誘導用ブロックに組み込まれたアクティブ型RFID(Radio Frequency Identification)タグを用いて視覚障害者に対して歩行支援を行う装置に関するものである。
【背景技術】
【0002】
視覚障害者を歩行支援する場合、視覚障害者が現在どこの場所に居るかを認知させることが重要である。従来のこの種の装置は電池を持たないパッシブ型RFIDタグ用い、それの設置されている緯度、経度等の場所に関する現在位置情報を内蔵して固定タグとして道路等に埋設する。視覚障害者が持ち歩く白杖の先端に内蔵されたRFIDリーダ・ライタ等の外部装置からの電波信号に応じて、前記場所に関する現在位置情報を、前記外部装置からの電波を電源とする固定タグから発信することにより設置場所を確認する方法が記載されている(例えば特許文献1参照。)。
【0003】
また電池を持ったアクティブ型RFIDタグである移動タグと、道路等に埋設されたアクティブ型RFIDタグである固定タグとが無線を使って通信し、移動タグからの無線によるプローブ信号に対し、固定タグが埋設してある場所の情報を無線により返信することにより場所を確認する方法がある(例えば特許文献2参照。)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】 特開2005−274245号公報
【0005】
【特許文献2】 特開2007−147445号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし特許文献1に記載された方法ではリーダ・ライタから供給される無線電力を用いるパッシブ型RFIDタグであり、通信距離が数cmしかなく、視覚障害者が歩行しながら杖の先端でRFIDタグの埋設位置を探すことは現実的に困難であった。
【0007】
視覚障害者向け歩行支援に使用するには視覚障害者の歩行速度等を考慮すると、通信距離を2m程度の範囲に制限するのが実用的である。これを狭めると、歩行速度に追従できなくなり埋設地点を通り過ぎてしまうという問題点があった。また広くすると、数m手前で反応してしまい埋設地点の精度が出なくなるといった問題点があった。特許文献2に記載された様な無線を用いた場合、通信距離を2m程度に制限することは困難であった。
【0008】
視覚障害者は目視による位置の特定ができないので、位置認識にずれが生じると歩道から交差点側にはみ出してしまったり階段に躓いたりしてしまうという問題点があった。
【0009】
電池等を電源とするアクティブ型RFIDタグは道路に埋設する場合、タグの動作に必要な電源の確保が問題であった。これの一つの解決方法は太陽電池による方法がある。しかし太陽電池は日照時間や周囲温度等に影響されて、その充電量が変動する。タグの動作は電波で行うため、タグが正常に動作しているか否かを目視等によって確認することは困難であった。
【課題を解決するための手段】
【0010】
本発明による固定タグは、太陽電池を電力供給源とし、場所情報コードを内蔵し、移動タグからの無線によるプローブ信号に応答して前記場所情報コードを無線により発信するアクティブ型RFIDタグで、前記太陽電池、前記固定タグが視覚障害者誘導用ブロックに組み込まれていることを特徴とする。
【0011】
本発明による固定タグは、太陽電池を電力供給源とし、場所情報コードを内蔵し、音による場所識別機能を持ち、移動タグからの無線によるプローブ信号に応答して前記場所情報コードを無線により発信するアクティブ型RFIDタグで、前記場所情報コードを発信すると共に音による場所識別信号を出力し、前記太陽電池、前記固定タグが視覚障害者誘導用ブロック内に組み込まれていることを特徴とする。
【0012】
本発明による固定タグは、太陽電池を電力供給源とし、場所情報コードを内蔵し、光による場所識別機能を持ち、移動タグからの無線によるプローブ信号に応答して前記場所情報コードを無線により発信するアクティブ型RFIDタグで、前記場所情報コードを発信すると共に光による場所識別信号を出力し、前記太陽電池、前記固定タグが視覚障害者誘導用ブロック内に組み込まれていることを特徴とする。
【0013】
本発明による固定タグは、太陽電池を電力供給源とし、場所情報コードを内蔵し、振動による場所識別機能を持ち、移動タグからの無線によるプローブ信号に応答して前記場所情報コードを無線により発信するアクティブ型RFIDタグで、前記場所情報コードを発信すると共に振動による場所識別信号を出力し、前記太陽電池、前記固定タグが視覚障害者誘導用ブロック内に組み込まれていることを特徴とする。
【発明の効果】
【0014】
本発明よれば視覚障害者向けに埋設されている視覚障害者誘導用ブロックに太陽電池を電力供給源とするアクティブ型RFIDタグを固定タグとして組み込み、あわせて音等による設置場所識別出力を行う。固定タグは視覚障害者が携帯している移動タグからのプローブ信号に応答し、埋設されている地点の場所情報コード等を移動タグに送信すると共に音や光を出力する。視覚障害者が携帯している移動タグは、前記場所情報コード等を受信し、その情報を音声等で出力する。このことにより視覚障害者は携帯している移動タグが固定タグの存在場所の近傍にあることが判断できるとともに、足の触覚で視覚障害者誘導用ブロックに組み込まれた固定タグの埋設地点であることを確認できる。または視覚障害者は視覚障害者誘導用ブロック上に居なくても、固定タグが出力する音を聴覚で確認することにより、両耳から固定タグの埋設地点の方向の確認ができまた聞こえてくる音の音量で埋設されている固定タグまでの距離を確認できる。加えて固定タグが発する振動により、視覚障害者は足の触覚で複数ある視覚障害者誘導用ブロックうち、それが何処にあるかを特定することが可能になる。
【0015】
あるいは固定タグが出力するLED等の表示により、視覚障害者と一緒に歩行するガイドの人にその埋設地点を知らせることができるとともに視覚によりそのアクティブ型RFIDタグが正常に動作していることが判断できる。光による出力は全盲の障害者に認識することは無理であるが、弱視の視覚障害者なら認識可能であるので、固定タグの埋設されている絶対位置確認が可能となる。
【発明を実施するための最良の形態】
【0016】
以下、本発明の実施形態について図面を参照して説明する。
【0017】
図1、図2は本発明の実施例を示すそれぞれ平面図、側面図である。ここで1は固定タグ、3は固定タグ1に内蔵された太陽電池ユニット、8は固定タグ1が組み込まれた視覚障害者誘導用ブロックである。
【0018】
図3、図4は本発明の実施例の視覚障害者誘導用ブロック8に内蔵される固定タグ1のそれぞれ平面図、側面図である。ここで1は固定タグ、2は固定タグ本体、301は太陽電池、302は電源制御回路、303は二次電池、401はスピーカ、402はLED、403は振動機器、101は固定タグ1の外側のアルミダイキャスト、102は固定タグ1の表面に視覚障害者誘導用ブロック用の点状突起を持つアクリル板である。
【0019】
固定タグ1は外部をアルミダイキャスト101で構成され、上面は視覚障害者誘導用ブロックの点状突起持つアクリル板102でおおわれている。アクリル板102は道路上に設置されるので、上からの耐荷重は1トン/平方センチメートル以上の強度をもち、また内部の太陽電池301の発電のために、光を通過する材質でできており四辺をネジで固定されている。固定タグ1は、雨水の浸水を防ぐため防水構造になっている。
【0020】
図12、図13従来のそれぞれ固定タグのブロック図、移動タグのブロック図である。
【0021】
図5、図6は本発明の実施例を示すそれぞれ固定タグのブロック図、移動タグのブロック図である。この図における符号は図3、図4の符号と同じである。
【0022】
図5において、1は固定タグ、2は固定タグ本体、3は太陽電池ユニット、4は表示装置ユニット、201、203はアンテナ、202は例えば電波法施行規則に規定する微弱無線等による第一の無線機、204は例えば電波法施行規則に規定する特定小電力無線等による第二の無線機、205はCPU、206、207はそれぞれメモリーA、メモリーB、301は太陽電池、302は電源制御回路、303は充放電可能な二次電池、304は電源制御回路302からの電源供給出力、401はスピーカ、402はLED、403は振動機器である。
【0023】
図6において、5は移動タグ、501、503はアンテナ、502は例えば電波法施行規則に規定する微弱無線等による第一の無線機、504は例えば電波法施行規則に規定する特定小電力無線等による第二の無線機、505はCPU、506は情報出力、507、508はそれぞれメモリーA、メモリーB、509は一次電池、510は一次電池509からの電源供給出力である。
【0024】
固定タグ1は図5に示すように、太陽電池ユニット3から電源供給を受ける。図3、図4に示すように、道路等に埋設された固定タグ1のアクリル板102を通して入射された太陽光は太陽電池301にあたり、太陽電池301で発電される。発電された電気は、電源制御回路302により二次電池303に充電される。また充電された電気は、電源制御回路302を通じて、電源供給出力304を介して固定タグ1を構成する回路に供給される。
【0025】
図5、図6および図12、図13を用いて従来のタグと本発明によるタグの違いを説明する。図5、図6および図12、図13の動作において、移動タグからプローブ信号を発信し、固定タグの場所情報コードを得る動作は従来の方法も本発明の方法も同じである。
【0026】
まず、移動タグからプローブ信号発信を発信し、固定タグの場所情報コードを得る動作を説明する。
【0027】
図7は本発明の実施例を示す固定タグと移動タグの情報の流れを示す概略図である。まず固定タグ1のメモリーA206には、固定タグ1の動作に必要なプログラムが、メモリーB207には固定タグ1の埋設地点の緯度、経度、高さ等のデータで構成される場所情報コードおよび埋設地点の情報、たとえば交差点の手前等、が予め記録されている。同様に移動タグ5のメモリーA507には移動タグ5の動作に必要なプログラムが記録されている。
【0028】
図5、図7にあるように、移動タグ5は第一の無線機502からプローブ信号を送信する。これはメモリーA507のプログラムによりCPU505が動作して、第一の無線機502からアンテナ501を介して一定周期で送出される。移動タグ5に必要な電源は一次電池509から、電源供給出力510を介して供給される。
【0029】
移動タグ5から送信されたプローブ信号を固定タグ1は、アンテナ201、第一の無線機202を介して受信し、CPU205に伝送される。CPU205はメモリーA206のプログラムにより動作している。プローブ信号を受信したCPU205は、メモリーB207に記録されている場所情報コードや必要に応じてその地点の温度等の情報を、第二の無線機204、アンテナ203を介して送信する。
【0030】
固定タグ1から送信された場所情報コード等の情報は、移動タグ5のアンテナ503、第二の無線機504を介して受信され、CPU505に伝達され、CPU505は前記情報をメモリーB508に記録するとともに、情報出力506を介して外部機器(図示せず)に受信した場所情報コードを出力する。
【0031】
視覚障害者は目で確認することができないので、得られた場所情報は音声表示等で確認する。この方法は、予め場所情報コードに対応した情報、たとえば「交差点です。」、「右方向の曲がり角です。」、「階段の手前です。」といった情報をサーバに格納し、この情報をインターネット等の通信手段により外部機器にダウンロードしておき、移動タグから得られた場所情報コードと対比することにより当該地点の情報を出力することができる。移動タグにこの機能を内蔵することも可能である。
【0032】
視覚障害者の歩行支援に必要な場所認識範囲はピンポイントが理想であるが、視覚障害者が固定タグの埋設地点上を歩行するとは限らないので、ある程度の範囲でその存在位置を知らせる必要がある。その範囲は半径約2mと考えられる。
【0033】
以上説明したプローブ信号送信から場所情報コード等の出力過程は図12、図13にある従来の固定タグ6および移動タグ7と同じである。
【0034】
図12、図13における第一の無線機702は電波法で送信出力が規定されており、その通信距離は数m〜数10mである。また第二の無線機604も電波法で送信電力が規定されており、その通信距離は数10m〜数100mである。
【0035】
現在のこの種の第一の無線機と第二の無縁機を用いた位置認識機システムでは、現在位置確認の範囲は半径約2mに限定することが困難である。
【0036】
以下従来の方法の問題点と解決すべき課題を説明する。
【0037】
図8、図9に本発明の第一の無線機のそれぞれ無線仕様例、伝送する情報の仕様例を示す。ここでプローブ信号の情報量は最大29Byte(232bit)であるので、伝送に要する通信時間は通信速度が4,800bpsの場合約49m秒である。これと通信同期に必要な時間(プリアンブル送信時間)10m秒を含めると、移動タグから固定タグへのセンシング時間は59m秒である。
【0038】
図10、図11に本発明の第二の無線機のそれぞれ無線仕様例、伝送する情報の仕様例を示す。ここで固定タグから移動タグへの確認情報の情報量は37Byte(296bit)であるので、通信速度が4,800bpsの場合伝送に要する通信時間は約62m秒である。
【0039】
従って場所情報センシング時間は59+62=約120m秒掛かる。移動タグが場所情報コードを取得してから、これに関する位置情報を照合して音声等で出力するまでの時間を約500m秒とすると、アクセス時間は全体で約620m秒掛かる。歩行速度を時速4kmとすると、その間の移動距離は69cmになる。
【0040】
上記は通信速度が4,800bpsの場合であるが、これが1,200bpsの場合だと移動タグから固定タグへのセンシング時間は、10+49×4=約300m秒。また固定タグからの通信時間は62×4=約250m秒となり、アクセス時間は1,050m秒となる。時速4kmで歩くと移動距離は117cmになる。
【0041】
視覚障害者にとって固定タグの埋設地点から場所情報コードの入手する場所までの距離は問題である。目安としては半径2m程度であるが、この範囲でも交差点では道路にはみ出てしまう。またT字路等では前面の壁にぶつかってしまう。あるいは階段の所でつまずいてしまうといった身に危険が及ぶ範囲である。また前述した様に場所情報を取得する間に0.7〜1.2mも歩いてしまうので、場所の絶対位置把握が課題である。
【0042】
次に、本発明による方法の効果を説明する。
【0043】
第一の無線機502の送信電力とアンテナ501の指向性を調節して、プローブ信号の通信範囲を2m以下に限定する。
【0044】
応答情報を送信する第二の無線機204の送信出力およびアンテナ203の指向性を調節して、通信範囲を3m程度にする。
【0045】
場所確認を限定するために、センシング信号であるプローブ信号の送信範囲を2m以下と狭め、応答情報の送信範囲は電波の伝播損失も考え3m程度の通信距離を確保した。このことにより視覚障害者が歩行しながら、その場所の確認に要する範囲を半径約2mに制限することが可能となった。
【0046】
本発明によると視覚障害者誘導用ブロックに固定タグを内蔵し、また固定タグに音、光、振動といった場所認識出力を追加することによって、半径2mの範囲をさらに特定することが可能となる。
【0047】
本発明によると、図1にあるように固定タグ1が視覚障害者誘導用ブロック8に内蔵されているので、視覚障害者は移動タグ5からの確認音とともに視覚障害者誘導用ブロックの点状突起を足の触覚で確認することにより、固定タグ1の存在位置を確認することができる。このことにより、移動タグ5の確認音だけでは正確でなかった固定タグ1の設置場所を認識することが可能になるという効果がある。
【0048】
視覚障害者誘導用ブロック8はJIS(日本工業規格)T9251に定められており、約300×300mmの大きさの道路に敷設する設備である。一般的に道路に設備を埋設するには、道路管理者の許可を得なければならない。視覚障害者誘導用ブロックは「高齢者、身体障害者等が円滑に利用できる特定建築物の建築の促進に関する法律」(略称:ハートビル法)や「高齢者、身体障害者等の公共交通機関を利用した移動の円滑化の促進に関する法律」(略称:交通バリアフリー法)で設置が推進されており、視覚障害者に対する支援設備として認められている。このことは視覚障害者誘導用ブロック8に内蔵されている固定タグ1は道路管理者の許可を得やすいと言う利点もある。また既に設置されている視覚障害者誘導用ブロックを固定タグ組み込み型に置き換えることで、工事の単純化ができる利点もある。
【0049】
本発明によると、図5および図7にあるように、固定タグ1がプローブ信号を受信して場所情報コード等を発信する際に、これに応じてスピーカ401から信号音等を出力する。これはCPU205が移動タグ5からのプローブ信号を検知し、固定タグ1に場所情報コード等を送信する時に応じて、表示装置4に信号を出力する。この信号により表示装置4は、スピーカ401の音出力、LED402の光出力、振動装置403の振動出力のいずれか一つ以上を出力する。
【0050】
視覚障害者にとって移動タグ5からの音による情報を聞いた際に、固定タグ1から出力された音も聴取できれば、固定タグ1からの音の発信源を両耳で聞くことにより固定タグ1の方向と固定タグ1までの距離とが確認できる。このことにより固定タグ1が、前方にあるのか、行き過ぎて後方にあるのか、右方向なのか、左方向なのかが判断できる。また両耳から聞こえる音量で、大凡の距離を判断できる。このことにより視覚障害者は歩いてきた方向と現在位置情報と固定タグ埋設場所識別の情報とで、より確実な位置判断が可能となる効果がある。
【0051】
視覚障害者にとって移動タグ5からの音による情報を聞いた際に、固定タグ1から出力された振動を足の感覚で認識できれば、複数ある視覚障害者誘導用ブロックの中でどの視覚障害者誘導用ブロックに固定タグ1があるのかを認識できる。このことにより視覚障害者は歩いてきた方向と現在位置情報と固定タグ埋設地点の情報とで、より確実な位置判断が可能となる効果がある。
【0052】
視覚障害者をサポートするガイドにとって固定タグ1から出力された光を認識することで、固定タグ1の設置場所が認識でき位置の確認が確実になる。特に光による表示は、夜間等で有用である。また全盲の視覚障害者には無理であるが、弱視の視覚障害者に対して、光のよる確認は有効である。
【0053】
太陽電池を電源とする機器において、その充電量は日照時間や周囲温度等により変動する。とくに道路に埋設された機器は、その確認手段が必要になる。本発明によれば、電波は目に見えないがスピーカ401の音、LED402の光、振動機器403による振動等はそれぞれ、人間の聴覚、視覚、触覚で確認することができる。このため専用の機器を用いて確認することなく、固定タグ1が正常に動作をしていることが認識できるという効果がある。このことは太陽電池を用いている装置に関して有用な手段となる。
【0054】
固定タグ1から出力される音、光、振動の表示パターンを変化させることにより固定タグ1の情報を表示することができる。例えば、電池が十分あれば「ピッ、ピッ、ピッ」、動作はできるが充電が足りない場合は、「ピピピッ」等の情報表示ができる。
【0055】
道路等に埋設された固定タグ1の保守方法は重要である。やたら掘り返すことは手間であり、費用が掛かるからである。これに対して図5の第二の無線204は送受信機能をもつことができる。これを使えば、外部の保守用無線機器(図示せず)より、アンテナ203、第二の無線機204、CPU205を介して、メモリーA206に記録されているCPU205のプログラムを書き換えることができる。こうすることにより固定タグ1を掘り返すことなく保守することができる。
【0056】
図7において、固定タグ1から出力される情報は緯度、経度、高さを示す場所情報コードのほかに、例えば内蔵する電池の電圧、周囲温度、設置場所情報コード(交差点、曲がり角、階段等)が考えられる。前述の電圧や周囲温度情報は、固定タグ1の保守等に活用できる。また後述の設置場所情報コードは、受信した場所情報コードに対応して移動タグ5に予め録音されている、「交差点です」、「曲がり角です」、「階段です」等の情報を対比して音声による情報出力が可能である。移動タグ5のメモリーB207に予めこの情報を記録しておけばサーバ等から通信網を介して場所情報内容をダウンロードすることなく、移動タグ5が独立に設置場所内容を表示することができる。
【0057】
視覚障害者にとって絶対位置の把握は重要である。通いなれた道ならばそこが曲がり角なのか、階段なのか、交差点なのかのポイントが把握できれば通常の歩行が可能になる。これは移動タグを送信機能のみとし、移動タグからのセンシング信号であるプローブ信号を定期的に送信し、このプローブ信号を受信した固定タグは音を表示することで可能である。固定タグが表示する音が、例えば交差点なら「ピッ、ピッ、ピー」、階段なら「ピッ、ピー」、曲がり角なら「ピッ、ピッ、ピッ」の様にその場所に応じて変化させることにより、より正確に場所を把握することができる。このことは移動タグや固定タグが独立に機能することができる。
【0058】
説明では、移動タグ、固定タグの無線機に第一の無線機、第二の無線機を用いた方法を行ったが、これを一つの無線機で行うことも可能である。これは移動タグの無線機の送信出力を通信範囲が2m以下とし、固定タグの無線機の送信出力を通信範囲3m程度とすればよい。
【0059】
図1、図2では固定タグ1を視覚障害者誘導用ブロック8に組み込んだが、固定タグの表面を約300×300mmとし、その表面構造をJIS T9251で定められている点状突起構造にしても、本発明による効果は同じである。
【0060】
同じく図1、図2ではその表面構造を、点状突起として説明したが、JIS T9251には点状突起と線状突起が定められている。このどちらの構造においても、本発明による効果は同じである。これは、固定タグの表面を約300×300mmとして、その構造をJIS T9251に規定されている構造にした場合も同様である。
【図面の簡単な説明】
【図1】本発明の実施例を示す平面図
【図2】本発明の実施例を示す側面図
【図3】本発明の実施例を示す固定タグの平面図
【図4】本発明の実施例を示す固定タグの側面図
【図5】本発明の実施例を示す固定タグのブロック図
【図6】本発明の実施例を示す移動タグのブロック図
【図7】本発明の実施例を示す固定タグと移動タグ間の情報の流れを示す概略図
【図8】本発明の第一の無線機の無線仕様例
【図9】本発明の第一の無線機の伝送する情報の仕様例
【図10】本発明の第二の無線機の無線仕様例
【図11】本発明の第二の無線機の伝送する情報の仕様例
【図12】従来の固定タグのブロック図
【図13】従来の移動タグのブロック図
【符号の説明】
1 固定タグ
2 固定タグ本体
3 太陽電池ユニット
4 表示装置ユニット
5 移動タグ
6 従来の固定タグ
7 従来の移動タグ
8 視覚障害者誘導用ブロック
101 アルミダイキャスト
102 アクリル板
201、203、501、503、601、603、701、703 アンテナ
202、502、602、702 第一の無線機
204,504、604、704 第二の無線機
205、505、605、705 CPU
206、507 メモリー A、
207、508 メモリー B
301 太陽電池
302 電源制御回路
303 二次電池
304、510、610、710 電源供給出力
401 スピーカ
402 LED
403 振動機器
506 情報出力
509、609、709 一次電池
606、707 メモリー
706 表示出力
【特許請求の範囲】
【請求項1】
太陽電池と、前記太陽電池を電力供給源とし、場所情報コードおよび場所識別信号を内蔵し、移動タグからの無線によるプローブ信号に応答して前記場所情報コードを無線により発信するとともに前記場所識別信号を出力する固定タグとがあり、前記太陽電池および前記固定タグが視覚障害者誘導用ブロックに組み込まれていることを特徴とする視覚障害者用歩行支援装置。
【請求項2】
前記場所識別信号が音であることを特徴とする、特許請求項1記載の視覚障害者用歩行支援装置。
【請求項3】
前記場所識別信号が光であることを特徴とする、特許請求項1記載の視覚障害者用歩行支援装置。
【請求項4】
前記場所識別信号が振動であることを特徴とする、特許請求項1記載の視覚障害者用歩行支援装置。
【請求項1】
太陽電池と、前記太陽電池を電力供給源とし、場所情報コードおよび場所識別信号を内蔵し、移動タグからの無線によるプローブ信号に応答して前記場所情報コードを無線により発信するとともに前記場所識別信号を出力する固定タグとがあり、前記太陽電池および前記固定タグが視覚障害者誘導用ブロックに組み込まれていることを特徴とする視覚障害者用歩行支援装置。
【請求項2】
前記場所識別信号が音であることを特徴とする、特許請求項1記載の視覚障害者用歩行支援装置。
【請求項3】
前記場所識別信号が光であることを特徴とする、特許請求項1記載の視覚障害者用歩行支援装置。
【請求項4】
前記場所識別信号が振動であることを特徴とする、特許請求項1記載の視覚障害者用歩行支援装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】

【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2012−221481(P2012−221481A)
【公開日】平成24年11月12日(2012.11.12)
【国際特許分類】
【出願番号】特願2011−96533(P2011−96533)
【出願日】平成23年4月7日(2011.4.7)
【出願人】(391016093)エル・エス・アイ ジャパン株式会社 (21)
【Fターム(参考)】
【公開日】平成24年11月12日(2012.11.12)
【国際特許分類】
【出願日】平成23年4月7日(2011.4.7)
【出願人】(391016093)エル・エス・アイ ジャパン株式会社 (21)
【Fターム(参考)】
[ Back to top ]