
観察装置及び端面欠陥検査装置
【課題】基板の端面部に接触することが無いいため端面部に影響を与えることがなく、ウエハの反りなどの形状による面振れ等にも適応した観察が可能な観察装置及び端面欠陥検査装置を提供する。
【解決手段】本発明は、基板の端面部を撮像する撮像装置と、基板を保持し回転可能な保持部と、基板の端面部の位置の変動量を検出する変位検出部と、撮像された画像を表示する表示部と、変位検出部からの信号をもとに撮像部で撮像された基板の端面部の画像が表示部上の一定の位置に観察されるよう制御する制御部とを備える観察装置及び端面欠陥検査装置である。
【解決手段】本発明は、基板の端面部を撮像する撮像装置と、基板を保持し回転可能な保持部と、基板の端面部の位置の変動量を検出する変位検出部と、撮像された画像を表示する表示部と、変位検出部からの信号をもとに撮像部で撮像された基板の端面部の画像が表示部上の一定の位置に観察されるよう制御する制御部とを備える観察装置及び端面欠陥検査装置である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ウエハ等の基板における端面や面取り部等の端面部を撮像し検査するための観察装置及び欠陥検査装置に関する。
【背景技術】
【0002】
一般に、半導体デバイスの基板としてシリコンウエハやガラスウエハ等が用いられている。これらの基板は、製造工程の中で顕微鏡等により基板表面が観察され、欠けやクラックの有無及び、異物の付着等が検査されている。
【0003】
近年の半導体製造技術の進歩から、半導体デバイスの高集積度化や多機能化を満たしつつ、ウエハの大型化が実現され、300mm径までに大きくなっている。これに伴い、ウエハの管理がより重要になってきている。これは一枚当たりのウエハで製造されるチップ数が相当数に増大したため、完成時のウエハが高価となり、たとえ一枚のウエハ割れにおいても大きな損害が発生するためである。
【0004】
また半導体製造装置は、コンピュータ管理による自動搬送や自動処理が行われており、真空内処理が行われる工程も多い。そのため、ウエハ割れが発生した場合には、その割れウエハの除去に時間が掛かり、復旧させて再稼働に至るまでに時間を要することになる。さらにウエハ割れが発生した場所(装置)によっては、製造ラインが停止する場合がある。特に、クリーンルーム内でウエハ割れが発生すると、粉状のウエハ片がパーティクルとなり、他の製造ラインに入り込み、製造途中の製品に付着して悪い影響を与える。
【0005】
このウエハ割れは、搬送時などに他のものとの衝突によりウエハの端面部または、外周縁部と呼ばれるウエハのエッジ部分にカケやクラック等が生じたところに、製造工程の熱処理による温度ストレスや裏面研削によるメカニカルなストレスが加えられることが原因と考えられている。
【0006】
このようなウエハの端面部分のカケ、クラック、キズなどの欠陥やレジストの不必要な部分へ回り込み、異物の付着の欠陥を専門に検出するものが知られている。例えば、特許文献1には、ウエハの周縁端を撮像するために、ウエハの周縁端の厚さ方向の異なる部位を撮像する複数のカメラとノッチの厚さ方向の異なる部位を撮像する複数のカメラを備えた検査装置が開示されている。また、特許文献2には、ウエハの周辺部、側面、下部の内の少なくとも1個所の観察を精度よく、容易に行うため、ステージとウエハを観察する自動焦点機構付きの複数の光学系を備えた観察装装置が開示されている。
【特許文献1】特開2003−243465号公報
【特許文献2】特開2001−221749号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかしながら、上記の従来の技術では以下のようなことが懸念される。特許文献1による検査装置は、円盤状のウエハを回転可能に支持する支持部には、回転の中心軸を中心とする円周上にウエハの周縁端を支承する複数の支承部を有し、これにより検査対象のウエハを支持するようになっている。このことは、ウエハの周縁端が支承部に接触することを示す。これにより、やはり周縁端に異物の付着やキズ等の欠陥を生じさせるおそれがある。さらに支承した部分を検査したい場合に持ち直しをする必要があり時間がかかるといった問題がある。
【0008】
また、特許文献2による観察装置では、アライメント機構を有し、このアライメント機構により概ねウエハ中心は駆動機構の回転中心に位置決めされており、更に厳密な外周部の観察を行う場合には、XYステージの駆動機構との連動動作を持って常にウエハ外周から所定距離内側を計測し得るような動作を行うことが開示されている。しかし、ウエハは必ずしも完全な平面ではなく、ウエハの反りなどにより外周部はウエハ面の法線方向にも上下動する。つまり、回転による端面部の偏心に対応できても、回転による端面部の法線方向への上下動(以下、面振れとする)に対応できない。そのため、特にウエハの端面部をウエハの法線方向に垂直な側方から撮像した場合に、表示部に表示された端面部の画像が上下動してしまい観察し難く、さらに高倍率の光学系を用いた撮像では、自動焦点機構により合焦していたとしても表示部の画面上から観察部位が外れ欠陥の観察、検査に支障をきたす場合がある。
【0009】
そこで本発明は、基板の端面部に接触することが無いため端面部に影響を与えることがなく、ウエハの反りなどの形状による面振れ等にも適応した観察が可能な観察装置及び端面欠陥検査装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
本発明は上記目的を達成するために、基板の端面部を撮像する撮像装置と、前記基板を保持するとともに前記基板の法線を回転軸として回転可能な保持部と、前記保持部の回転によって発生する前記基板の端面部の位置の変動を検出する変位検出部と、前記撮像装置で撮像された画像を表示する表示部と、前記変位検出部からの信号をもとに前記撮像装置で撮像された前記基板の端面部の画像が前記表示部上の一定の位置に観察されるよう制御する制御部とを備えることを特徴とする観察装置及び端面欠陥検出装置を提供する。
【0011】
以上のような構成の観察装置は、撮像装置で保持部に装着される基板の端面部を撮像し、表示部に撮像された基板の端面部を表示する。このとき保持部の回転によって発生する基板の端面部の位置の変動を検出する変位検出部からの信号をもとに表示部に表示された端面部の位置が一定の位置に留まって観察されるよう制御部で制御しながら撮像を行う。
【発明の効果】
【0012】
本発明によれば、基板の端面部に接触することが無いため端面部に影響を与えることがなく、ウエハの形状等による面振れ等にも適応した観察が可能な観察装置及び端面欠陥検査装置を提供することができる。
【発明を実施するための最良の形態】
【0013】
以下、本発明の第1の実施の形態について、図1と図2をもとに詳細に説明する。
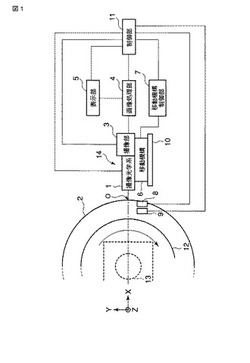
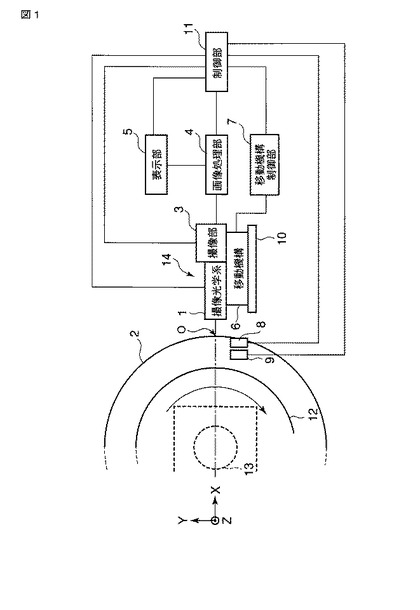
図1は、本発明の第1の実施の形態の観察装置を基板の法線方向から見た概略構成を示す図である。また、図2は本実施の形態の観察装置をウエハ2の主面の法線方向に直交する方向から見た側面図である。
【0014】
なお、以下に記載の端面部とは基板の端面(側面)と端面の周辺の表裏面部分や面取りがある場合は、面取り部分やその周辺の表裏面、さらにレジスト塗布後に周縁部の不要なレジストをリンス液により除去した部分でエッジカット部、またはリンスカット部と呼ばれる部分等も含むものとする。この観察装置は、撮像光学系1と、撮像光学系1で結像されたウエハ2(基板)の端面部の画像を光電変換して画像信号を生成する撮像部3を備えている。これら撮像光学系1と撮像部3で光学モジュール14(撮像装置)を構成している。そして生成された画像信号から画像データを生成する画像処理部4と、画像処理部4により生成された画像データを表示する表示部5を備えている。そして光学モジュール14を設置し、ウエハ2の端面部のある一点を中心に端面部の周囲を回動する移動や光軸に沿った前後方向の移動させる移動機構6(移動機構または撮像装置移動機構)とその移動機構6を駆動制御する移動機構制御部7を備えている。さらにウエハ2を搭載して回転可能な回転テーブル12と、回転テーブル12に載置されているウエハ2における端面部の回転時の光軸方向への偏心量を検出する位置センサ8(変位検出部)と、回転するウエハ2における端面部の面振れを検出する位置センサ9(変位検出部)と、移動機構6及び光学モジュール14を設置するベース10と、本装置の構成部位の全体を制御する制御部11とで構成される。
【0015】
撮像光学系1は、対物レンズ、結像レンズ等の光学レンズや照明光をウエハに導くためのハーフミラー等により構成される。この撮像光学系1における観察像は、実体顕微鏡レベルの倍率の必要はなく、5x(NA:0.15)、10x(NA:0.3)、20x(NA:0.35)相当の倍率を採用できる。
【0016】
撮像部3には、光電変換によりウエハ2の端面部の像の画像信号を生成する撮像素子28が設けられている。撮像素子28にはCCD等の固体撮像素子が採用される。この撮像素子は縦横2次元に配置されたエリアセンサでもよく、1次元に配置されたラインセンサでもよい。ラインセンサであるとき1次元の長手方向は、後述する回動する面内に一致している。
【0017】
光学モジュール14(撮像装置)は撮像光学系1及び撮像部3から構成され、端面部の撮像を行う。この光学モジュール14には必要によりオートフォーカス機能やズーミング機能を持たせてもよい。画像処理部4は予め設定されたアプリケーションソフトウエアに基づき種々の画像処理を施して所望の画像データを生成する。表示部5は、モニタであり、光学モジュール14により撮像された画像を表示する。この表示部5の画面上にはタッチパネルが配設され、表示される指示ボタン像にタッチすることにより、指示等を入力することができる。
【0018】
位置センサ8及び位置センサ9は、図1に示すXYテーブル12の下方で載置するウエハ2に近接した位置に配置されている。具体的には、これらの位置センサ8,9は、ウエハ2の主面の外周端部と、外周端部から僅かに内側の主面が検出点となるように架台部に設置された支持部材に配置されている。ただし、位置センサ8はウエハ2の偏心量を、位置センサ9はウエハ2の面振れ量を検出できれば、周縁端に並んで配置されていても良い。
【0019】
位置センサ8は、周知のウエハ2の偏心量を検出するための透過型の検出器であり、ウエハ端面部を挟んで対向して発光素子と受光素子を備えている。回転テーブル12の回転軸13により回転されているウエハ2の端面部に光を照射し、端面部から遮られることなく受光される光量を検出する。
【0020】
なお、位置センサ8は受光部と送光部が一体にウエアは端面部の同じ側に配置された反射型の検出器であってもよい。また、オートフォーカス機能を搭載していれば、これにより偏心による合焦ズレに対応してもよい。
また、位置センサ9は、周知の光学式の測長センサであり、回転するウエハ2における面振れ量(位置センサ9からウエハ2の主面までの距離の変動)を検出する。
【0021】
移動機構6(移動機構または撮像装置移動機構)は、光学モジュール14を装着している。そして位置センサ8及び位置センサ9により検出された偏心量及び面振れ量に基づき補正するように移動させる駆動機構を備えている。つまり、光学モジュール14を光軸方向の前後に高速微小移動する第1の駆動機構と光学モジュール14をウエハ2の主面と垂直な軸方向(基板の法線方向)の前後(上下)に高速微小移動する第2の駆動機構とを備えている。なお、これらの偏心量及び面振れ量を補正する移動機構は、移動機構6と別体であってもよい。
【0022】
回転テーブル12は、ウエハ2の裏面を吸着保持する円形のステージである。ウエハの載置部は外周緑に沿って壁部が形成され、その壁部がウエハ2の裏面に接触する。その内径側にはピンが多数配設され、ウエハの裏面が平面になるよう支える、回転テーブル12の直径は、基板の直径より小さくウエハ裏面の端面部の観察が可能となっている。裏面の端面部が最小限観察できる程度として、できるだけ大きな略ウエハの直径と同等とすることが望ましい。特にテーブル直径をウエハ直径の90%以上とし、テーブルの全面を吸着可能な構成とすれば、ウエハの反りによる観察位置のズレを防止できる。ロボットアームにてウエハを受け渡すために、テーブルの中央部に複数のピンやテーブルが昇降する機構が設けられていても良い。
【0023】
そして、回転軸13は図示しないモータにより回転し、載置部が回転する。また、回転角度を検出するエンコーダが搭載されていて、角度を検出し制御部に伝送できるようになっていてもよい。この回転テーブル12は周知の外観検査装置の顕微鏡を用いたミクロ検査部の回転XYステージと共通のものであってもよい。
【0024】
ベース10は、図示しない架台部に設置された板状部材であり、その平面上にガイドレールが配設される。そしてガイドレールを介して移動機構6が回動可能に設置される。
制御部11は、ウエハの回転時の偏心やウエハの反りによる面振れによる合焦ズレや位置ズレを補正したり、適正な角度観察できるように回動動作を行ったりなど観察装置全体の制御を行う。移動機構制御部7と画像処理部4とを一体に含み、それらはパーソナルコンピュータからなっていてもよい。また、制御部11には、ウエハ2の回転時の偏心量やノッチ位置を検出するための予め測定されたデータテーブル等が登録されている。
【0025】
次に移動機構6の回動移動について説明する。図2に示すように、ベース10は、円弧形状のガイドレール18を配設している。そして移動機構6は、このガイドレール18上をリニアモータ等のモータ駆動により回動移動するように構成されている。つまり、移動機構6は、第3の駆動機構として回動移動機構を備えている。ここで回動軸は、点Oを通り回転テーブル12の回転軸と撮像光学系の光軸を含む面に垂直となっている。つまり、ワイパーのように振られる(回動移動する)アーム機構を設けて、このアーム機構上に移動機構6を配置するようにしても良い。
【0026】
他にも、撮像光学系1の光軸が回転テーブル12の回転の中心軸と光学モジュール14による光軸を含む平面内で点Oを中心に回動するならば、種々の機構により回動移動を実現することは可能である。
【0027】
また回動軸の位置は撮像光学系1の光軸がウエハ2の端面に到達した位置よりややウエハの内側に入り込んだ位置にある。図2(b)に示すように、回動軸の位置は、この回動軸を中心に回動をしたときの撮像光学系1の光軸が端面、表面、裏面の面取り部に対して直交し、点O(回動軸)からの距離が等しくなるように設定されている。これにより回動移動を行っても、撮像光学系1の合焦位置を端面または面取り部に設定すれば端面部と撮像光学系1の距離がほぼ一定に保つことができる。
【0028】
面取りの形状によっては、端面部と撮像光学系1の距離がほぼ一定とならず、光学モジュールの被写界深度から外れる場合は、オートフォーカス機構により合焦距離を調整して対応しても良い。
【0029】
また、移動機構6は、ウエハの主面に直交する軸方向に所望するまたは設計に基づく回動振り角度で回動移動する。その回動角度範囲は、90°から180°程度あることが望ましく、特にウエハ表面のリンスカット量を観察するには主面に垂直方向から観察できる角度範囲であることが望ましい。
【0030】
以上により撮像光学系1の光軸がウエハ2の表面から端面を経て裏面に、または裏面から端面を経て表面に移動することとなる。これにより本実施の形態の観察装置の光学モジュール14は、点Oを通る回動軸を中心として、ウエハ2の端面とこの端面に繋がる表裏面を連続的に撮像光学系1の観察視野に入れることができる。
【0031】
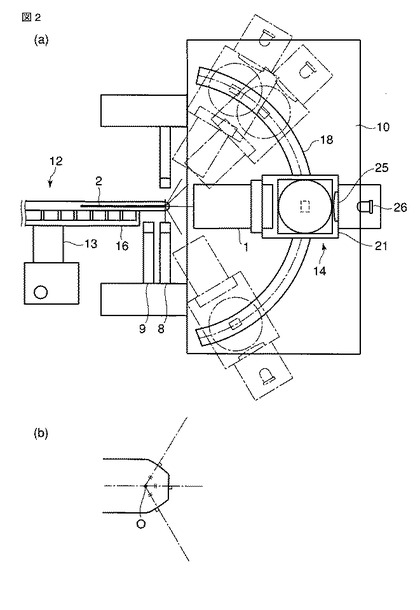
次に光学モジュール14の構成例を示して説明する。図3は、ウエハ2の主面の法線方向から光学モジュール14を見た図である。光学モジュール14は、レンズマウント本体21に撮像光学系1及び撮像部3が搭載されて構成される。撮像光学系1及び撮像部3は、共にマウントネジ等を用いて容易に着脱自在できるようにレンズマウント本体21に取り付けられている。さらにレンズマウント本体21は、移動機構6上に取り付けられている。
【0032】
撮像光学系1としては、対物レンズ22と、ハーフミラー23と、結像レンズ24とで構成され、ハーフミラー23により対物レンズ22の光軸が90°偏向され、結像レンズ24に向かうように配置される。対物レンズ22は、ウエハ2の端面、表面裏面の斜め方向からの観察時、1つの対物レンズが用いられる。また、必要により、倍率の異なる複数の対物レンズを用いてもよい。
【0033】
また、対物レンズ22から見てハーフミラー23の後方には、照明光を集光するためのレンズ25及び照明光を出射する発光ダイオード(LED)26がレンズマウント本体21に着脱自在に取り付けられている。LED26は、ウエハ2の端面が十分な明るさで撮像できる光量と指向性を有している。
【0034】
また、LED26が出射した照明光が検査に悪形響を与えないように外部への濡れを防止するための遮光カバー27がLED26を覆うように適宜設けられている。更に、照明は対物レンズ2の鏡体の周辺部に複数のLED照明29を設けている。またLED26の周りにはリング照明19を設けており、適宜観察し易い照明を選択できるようになっている。つまり、LED26による同軸落斜照明、LED照明29による観察光学系の側方から斜照明、リング照明19による暗視野照明を用いて個々の観察や複数の複合された照明下での観察を行うこともできる。
【0035】
次に、このように構成された観察装置の動作について説明する。まず、LED26から出射された照明光は、レンズ25で集光される。そしてハーフミラー23を透過し、さらに対物レンズ22から観察対象となるウエハ2に平行光束として照射される。ウエハ2で反射された光は、対物レンズ22へ入射する。対物レンズ22からの光束は、ハーフミラー23で偏向され、結像レンズ24に向かう。結像レンズ24では光束を撮像部3内の撮像素子(CCD)28の受光面に結像する。撮像素子28は、光電変換によりウエハ2の端面部の画像信号を生成する。画像処理部4は、生成された画像信号に対して予め設定されたアプリケーションソフトウエアに基づき種々の画像処理を施して画像データを生成して表示部5に後述する画面構成で画像データを表示する。
【0036】
また、回転テーブル12に載置されたウエハ2の中心が、回転中心の軸に対し偏心し、さらにウエハ2に反りが発生していた場合についての補正動作を説明する。ここでは、図2の実線のように光学モジュール14は、端面を観察するよう回転テーブル12の回転の中心軸に垂直な方向に光軸が向くよう配置されているものとする。
【0037】
まず、回転テーブル12が回転を開始したとき、位置センサ8は、その時点での検出光量の信号をリアルタイムに制御部11に伝達する。ウエハ2は偏心しているので、位置センサ8を遮る光量が変化する。センサを制御する制御部11は、位置センサ8から受け取った光量の信号をもとにデータテーブルからウエハ2の偏心量(変動量)を求める。そして制御部11は、求められた偏心量を補正するための移動機構の第1の駆動機構の移動量を算出して移動機構制御部7に指示を出す。移動機構制御部7は、受け取った補正のための移動量の信号をもとに移動機構6の第1の駆動機構を制御して常にウエハ端面と撮像光学系1の距離が一定となるようにする。つまり、合焦状態を保った状態の端面の画像が表示部に表示される。
【0038】
同様に位置センサ9は、その時点の位置センサ9とウエハ端面部(主面の周縁部)の距離の信号をリアルタイムに制御部11に伝達する。ウエハ2は反りを起こしているので、位置センサ9は検出する距離が変化する。制御部11は、位置センサ9から受け取った距離(面振れ量、変動量)の信号をもとにデータテーブルからウエハ2の端面との距離を求める。求められた距離の変化を補正するための移動機構の第2の駆動機構の移動量を算出して、移動機構制御部7に指示を出す。移動機構制御部7は、受け取った補正のための移動量の信号をもとに移動機構6の第2の駆動機構を制御して常に位置センサ9とウエハ端面部(主面の周縁部)の距離が一定となるようにする。つまり、端面部の画像が表示部上の一定な位置に表示される。
【0039】
なお、光学モジュール14の位置を図2(a)の実線の位置としたが、例えば、ウエハ2の主面に垂直な方向にある場合は、第1の駆動機構と第2の駆動機構の最終的な作用である「合焦状態を保った状態の端面の画像が表示部に表示される」と「端面部の画像が表示部上の一定な位置に表示される」が入れ替わる。また、斜めから観察する位置にある場合は、第1の駆動機構と第2の駆動機構とが同時に作用して合焦状態を保った状態の端面の画像が表示部に表示される」と「端面部の画像が表示部上の一定な位置に表示される」ことが同時に行われる。以上により、光学モジュール14がどの回動位置にあっても、ウエハ2の端面部と撮像光学系の相対的な位置が一定に保たれ、相対的な距離と観察光軸の角度がほぼ一定に保たれるので表示部の表示画面上に端面部が一定の位置を保ち合焦した状態で表示することができる。
【0040】
また、これらの動作は高速に行われるので、表示部を観察する限りでは認識されない。ノッチ部に関しては、位置センサ8では大きな光量の変化となるので、大きな光量変化をノッチ部と認織し、移動機構6を動作させないようにしても良い。また、ウエハ2が微小な反りであり、回動移動機構で対応できるならば、第2の駆動機構の代わりに回動移動機構により回動移動を行っても良い。また、本実施の形態の説明では、リアルタイムに、位置の変動を検出して補正するとしたが、回転テーブル12が回転角度を検出するエンコーダを備えていて予め360°回転、つまり一回転してノッチ位置、面振れ量と偏心量のデータを取得して補正量を記憶してから、回転テーブル12の回転角度毎に偏心、面振れを補正しながら撮像するようにしてもよい。
【0041】
本第1の実施の形態では、光学モジュール14を設置する移動機構6が回転テーブル12の回転軸と撮像光学系の光軸を含む面内で移動させるようにしたので、構成が簡単な回転テーブルが設置されているだけで単独の端面欠陥検査装置として用いることができる。また、一般的な回転テーブルを備える装置の回転テーブル近傍に、本観察装置の回転テーブル12を除いて配設することで、専用の端面欠陥検査装置を導入しなくても端面欠陥検査装置として用いることができるので、容易で安価に端面欠陥検出装置を構築することができる。
【0042】
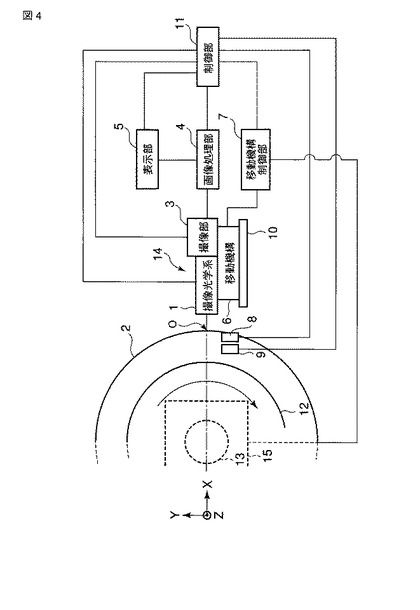
次に本発明の第2の実施の形態について、図4を参照して詳細に説明する。
図4は、本発明の第2の実施の形態の観察装置を基板の法線方向から見た概略構成を示す図である。本第2の実施の形態の観察装置は、基板の外観検査装置に備えられている回転可能なXY回転ステージを回転テーブル12として共用したものとして説明する。
【0043】
ここでば、第1の実施の形態と異なる構成についてのみ説明し、共通な構成については省略する。第1の実施の形態からの変更点は、移動機構6の第1の駆動機構が省略されたこと、回転テーブル12の回転軸13がXYステージ部15(移動機構または保持部移動機構)に設置されること(これにより回転テーブル12は、XY平面内で移動可能となる)、移動機構であるXYステージ15のX方向の移動が端面部の観察時に移動機構制御部7を介して制御部11により制御されることである。
【0044】
これは第1の実施の形態における移動機構6の第1の駆動機構の移動をXYステージ15のX方向の移動へ置き換えたものと考えればよい。
【0045】
本第2の実施の形態では、XY回転ステージをもつ装置に本観察装置を追加装着することにより移動機構を省略でき、安価に端面欠陥検査装置を構築することができる。
【0046】
変形例として、移動機構6の第1、第2の駆動機構が省略され、かつ、回転ステージ12の移動機構であるXYステージ15(移動機構または保持部移動機構)の移動方向がXY平面に加え、Z軸方向にも移動可能な機構を備え、移動機構制御部7を介して制御部11によりX、Z方向に移動制御されるように構成しても良い。
【0047】
第1の実施の形態の移動機構6の第1の駆動機構の移動をXYステージ15のX方向の移動へ移動機構6の第2の駆動機構の移動をXYステージ15のZ方向の移動へ置き換えたものとなる。第2の実施の形態と同様に、XYZ回転ステージをもつ装置に追加装着すれば、移動機構を省略でき、安価に端面欠陥検査装置を実現することができる。
【0048】
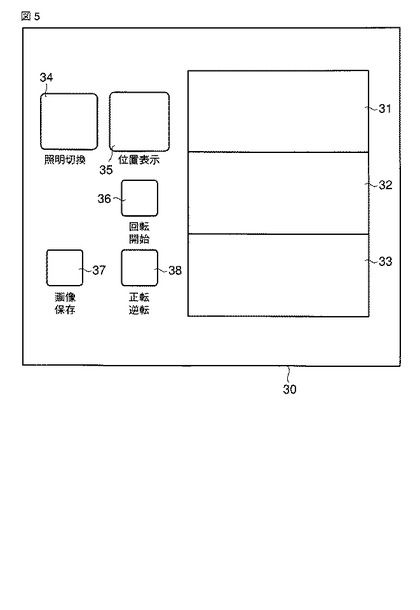
図5は、本発明における表示部に表示する画像データの画面構成例を示す。図5に示すように、処理された画像データやこの画像データに関する情報を表示部5の画面30に分けて表示する。この画面構成では、観察対象物であるウエハ2の外周端部における、表斜め面(主面表面)画像31、端面(側面)画像32、裏斜め面(主面裏面)画像33の3個所のそれぞれ画像が同時に並べて表示している。この複数同時画像表示は、例えば、多チャンネル対応の画像ボード等を用いることにより容易に実現できる。また、ウエハ斜め面の画像の上下部分は非合焦画像(ボケ画像)となるので、その部分をカットすることにより、SXGA(Super Extended Graphic Array)クラスの表示部5に3箇所の画像を同時表示することができる。
【0049】
これらの画像表示領域の横には、種々の動作を指示するための操作画像が表示される。この操作画像としては、例えば、照明切換指示画像(ボタン像)34、位置表示画像(ウエハ上の位置表示)35、ウエハ2の回転開始指示画像(ボタン像)36、画像保存指示画像(ボタン像)37及び画像の正転逆転指示画像(ボタン像)38がある。勿論、図示される指示操作だけに限定されるものではなく、所望する操作の指示画像を追加して表示するまたは、不要な指示画像を削除することができる。
【0050】
この指示画像の例では、保存したい画像が表示されているときに、画像保存指示画像のボタン像37をタッチすることにより観察画像保存が行われる。また、回転開始指示画像のボタン像36をタッチすることにより、回転テーブル12に載置されるウエハ2を回転制御することができる。さらに、正転逆転指示画像のボタン像38にタッチすることにより、回転テーブル12の回転を正転または逆転させることができる。ウエハ2に設けられたノッチを基準位置として、外周端部の位置情報(角度、位置)を表示することができる。
【0051】
上述したように本観察装置は、撮像光学系が変倍機構を持てば、低倍率から高倍率域の画像をリアルタイム表示や画像保存もできる。ウエハのノッチ基準を基準とした位置情報を検出された欠陥や異物等の画像情報と併せて保存することもでき、不良解析に役立つ。さらに、観察照明方向を切換えることにより、異物や欠陥を探す上で、観察性能を選択できるため、異物原因を特定し易い。また、位置センサにより観察対象物の変動を検出して位置補正することから、撮像された画像における観察位置が変動せず、合焦画像が得られるため観察しやすい。
【0052】
なお、本発明の観察装置は3つの光学モジュールを備え、それぞれに画像処理部を設けて、表示部に同時表示する構成とすれば、3方向からの画像を同時に撮像できる観察装置または端面欠陥検査装置とすることもできる。
【0053】
また、撮像部3により撮像された画像信号は、予め画像処理部4に格納されるアプリケーションソフトウエアにより表示部に表示される端面部の位置処理が一定になるよう画像処理が施されてもよい。例えば、図2の実線の位置に光学モジュール14を配置した場合に、端面部の表示部への表示位置が一定になるようにする。画像回転テーブル12よりウエハ2を回転させてもアライメント精度が出ていて偏心が少なく合焦された画像となっているとき、ウエハ2の反りによるが表示部5上の端面部の位置が回転に合わせて波打つなどの変動のみを抑える処理を行うときは、画像信号の端面部による輝度の境目が常に表示部5の一定になるように位置を再構築して表示してもよい。また、位置センサ8、9からの信号をもとに光学モジュール14とウエハ2の端面部との相対的な位置を検出し、その検出されたデータをもとに画面上の位置と検出された位置関係から端面部の画像が表示部の一定の位置に表示されるよう画像処理するようにしてもよい。このようにすれば、リアルタイムに位置ずれのない画像を観察することができる。
【図面の簡単な説明】
【0054】
【図1】第1の実施の形態の観察装置を基板の法線方向から見た概略構成を示す図である。
【図2】第1の実施の形態の観察装置をウエハの法線方向に直行する方向から見た側面図である。
【図3】第1の実施の形態の観察装置の光学モジュール14の構成例を示す図である。
【図4】第2の実施の形態の観察装置を基板の法線方向から見た概略構成を示す図である。
【図5】表示部に表示する画像データの画面構成例を示す図である。
【符号の説明】
【0055】
1…撮像光学系、2…観察対象物(シリコンウエハ)、3…撮像部、4…画像処理部、5…表示部、6…移動機構、7…移動機構制御部、8,9…位置センサ、10…ベース、11…制御部、12…回転テーブル、13…回転テーブルの回転軸、14…光学モジュール、21…レンズマウント本体、22…対物レンズ、23…ハーフミラー、24…結像レンズ、25…レンズ、26…発光ダイオード(LED)、27…遮光カバー、28…撮像素子(CCD)。
【技術分野】
【0001】
本発明は、ウエハ等の基板における端面や面取り部等の端面部を撮像し検査するための観察装置及び欠陥検査装置に関する。
【背景技術】
【0002】
一般に、半導体デバイスの基板としてシリコンウエハやガラスウエハ等が用いられている。これらの基板は、製造工程の中で顕微鏡等により基板表面が観察され、欠けやクラックの有無及び、異物の付着等が検査されている。
【0003】
近年の半導体製造技術の進歩から、半導体デバイスの高集積度化や多機能化を満たしつつ、ウエハの大型化が実現され、300mm径までに大きくなっている。これに伴い、ウエハの管理がより重要になってきている。これは一枚当たりのウエハで製造されるチップ数が相当数に増大したため、完成時のウエハが高価となり、たとえ一枚のウエハ割れにおいても大きな損害が発生するためである。
【0004】
また半導体製造装置は、コンピュータ管理による自動搬送や自動処理が行われており、真空内処理が行われる工程も多い。そのため、ウエハ割れが発生した場合には、その割れウエハの除去に時間が掛かり、復旧させて再稼働に至るまでに時間を要することになる。さらにウエハ割れが発生した場所(装置)によっては、製造ラインが停止する場合がある。特に、クリーンルーム内でウエハ割れが発生すると、粉状のウエハ片がパーティクルとなり、他の製造ラインに入り込み、製造途中の製品に付着して悪い影響を与える。
【0005】
このウエハ割れは、搬送時などに他のものとの衝突によりウエハの端面部または、外周縁部と呼ばれるウエハのエッジ部分にカケやクラック等が生じたところに、製造工程の熱処理による温度ストレスや裏面研削によるメカニカルなストレスが加えられることが原因と考えられている。
【0006】
このようなウエハの端面部分のカケ、クラック、キズなどの欠陥やレジストの不必要な部分へ回り込み、異物の付着の欠陥を専門に検出するものが知られている。例えば、特許文献1には、ウエハの周縁端を撮像するために、ウエハの周縁端の厚さ方向の異なる部位を撮像する複数のカメラとノッチの厚さ方向の異なる部位を撮像する複数のカメラを備えた検査装置が開示されている。また、特許文献2には、ウエハの周辺部、側面、下部の内の少なくとも1個所の観察を精度よく、容易に行うため、ステージとウエハを観察する自動焦点機構付きの複数の光学系を備えた観察装装置が開示されている。
【特許文献1】特開2003−243465号公報
【特許文献2】特開2001−221749号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかしながら、上記の従来の技術では以下のようなことが懸念される。特許文献1による検査装置は、円盤状のウエハを回転可能に支持する支持部には、回転の中心軸を中心とする円周上にウエハの周縁端を支承する複数の支承部を有し、これにより検査対象のウエハを支持するようになっている。このことは、ウエハの周縁端が支承部に接触することを示す。これにより、やはり周縁端に異物の付着やキズ等の欠陥を生じさせるおそれがある。さらに支承した部分を検査したい場合に持ち直しをする必要があり時間がかかるといった問題がある。
【0008】
また、特許文献2による観察装置では、アライメント機構を有し、このアライメント機構により概ねウエハ中心は駆動機構の回転中心に位置決めされており、更に厳密な外周部の観察を行う場合には、XYステージの駆動機構との連動動作を持って常にウエハ外周から所定距離内側を計測し得るような動作を行うことが開示されている。しかし、ウエハは必ずしも完全な平面ではなく、ウエハの反りなどにより外周部はウエハ面の法線方向にも上下動する。つまり、回転による端面部の偏心に対応できても、回転による端面部の法線方向への上下動(以下、面振れとする)に対応できない。そのため、特にウエハの端面部をウエハの法線方向に垂直な側方から撮像した場合に、表示部に表示された端面部の画像が上下動してしまい観察し難く、さらに高倍率の光学系を用いた撮像では、自動焦点機構により合焦していたとしても表示部の画面上から観察部位が外れ欠陥の観察、検査に支障をきたす場合がある。
【0009】
そこで本発明は、基板の端面部に接触することが無いため端面部に影響を与えることがなく、ウエハの反りなどの形状による面振れ等にも適応した観察が可能な観察装置及び端面欠陥検査装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
本発明は上記目的を達成するために、基板の端面部を撮像する撮像装置と、前記基板を保持するとともに前記基板の法線を回転軸として回転可能な保持部と、前記保持部の回転によって発生する前記基板の端面部の位置の変動を検出する変位検出部と、前記撮像装置で撮像された画像を表示する表示部と、前記変位検出部からの信号をもとに前記撮像装置で撮像された前記基板の端面部の画像が前記表示部上の一定の位置に観察されるよう制御する制御部とを備えることを特徴とする観察装置及び端面欠陥検出装置を提供する。
【0011】
以上のような構成の観察装置は、撮像装置で保持部に装着される基板の端面部を撮像し、表示部に撮像された基板の端面部を表示する。このとき保持部の回転によって発生する基板の端面部の位置の変動を検出する変位検出部からの信号をもとに表示部に表示された端面部の位置が一定の位置に留まって観察されるよう制御部で制御しながら撮像を行う。
【発明の効果】
【0012】
本発明によれば、基板の端面部に接触することが無いため端面部に影響を与えることがなく、ウエハの形状等による面振れ等にも適応した観察が可能な観察装置及び端面欠陥検査装置を提供することができる。
【発明を実施するための最良の形態】
【0013】
以下、本発明の第1の実施の形態について、図1と図2をもとに詳細に説明する。
図1は、本発明の第1の実施の形態の観察装置を基板の法線方向から見た概略構成を示す図である。また、図2は本実施の形態の観察装置をウエハ2の主面の法線方向に直交する方向から見た側面図である。
【0014】
なお、以下に記載の端面部とは基板の端面(側面)と端面の周辺の表裏面部分や面取りがある場合は、面取り部分やその周辺の表裏面、さらにレジスト塗布後に周縁部の不要なレジストをリンス液により除去した部分でエッジカット部、またはリンスカット部と呼ばれる部分等も含むものとする。この観察装置は、撮像光学系1と、撮像光学系1で結像されたウエハ2(基板)の端面部の画像を光電変換して画像信号を生成する撮像部3を備えている。これら撮像光学系1と撮像部3で光学モジュール14(撮像装置)を構成している。そして生成された画像信号から画像データを生成する画像処理部4と、画像処理部4により生成された画像データを表示する表示部5を備えている。そして光学モジュール14を設置し、ウエハ2の端面部のある一点を中心に端面部の周囲を回動する移動や光軸に沿った前後方向の移動させる移動機構6(移動機構または撮像装置移動機構)とその移動機構6を駆動制御する移動機構制御部7を備えている。さらにウエハ2を搭載して回転可能な回転テーブル12と、回転テーブル12に載置されているウエハ2における端面部の回転時の光軸方向への偏心量を検出する位置センサ8(変位検出部)と、回転するウエハ2における端面部の面振れを検出する位置センサ9(変位検出部)と、移動機構6及び光学モジュール14を設置するベース10と、本装置の構成部位の全体を制御する制御部11とで構成される。
【0015】
撮像光学系1は、対物レンズ、結像レンズ等の光学レンズや照明光をウエハに導くためのハーフミラー等により構成される。この撮像光学系1における観察像は、実体顕微鏡レベルの倍率の必要はなく、5x(NA:0.15)、10x(NA:0.3)、20x(NA:0.35)相当の倍率を採用できる。
【0016】
撮像部3には、光電変換によりウエハ2の端面部の像の画像信号を生成する撮像素子28が設けられている。撮像素子28にはCCD等の固体撮像素子が採用される。この撮像素子は縦横2次元に配置されたエリアセンサでもよく、1次元に配置されたラインセンサでもよい。ラインセンサであるとき1次元の長手方向は、後述する回動する面内に一致している。
【0017】
光学モジュール14(撮像装置)は撮像光学系1及び撮像部3から構成され、端面部の撮像を行う。この光学モジュール14には必要によりオートフォーカス機能やズーミング機能を持たせてもよい。画像処理部4は予め設定されたアプリケーションソフトウエアに基づき種々の画像処理を施して所望の画像データを生成する。表示部5は、モニタであり、光学モジュール14により撮像された画像を表示する。この表示部5の画面上にはタッチパネルが配設され、表示される指示ボタン像にタッチすることにより、指示等を入力することができる。
【0018】
位置センサ8及び位置センサ9は、図1に示すXYテーブル12の下方で載置するウエハ2に近接した位置に配置されている。具体的には、これらの位置センサ8,9は、ウエハ2の主面の外周端部と、外周端部から僅かに内側の主面が検出点となるように架台部に設置された支持部材に配置されている。ただし、位置センサ8はウエハ2の偏心量を、位置センサ9はウエハ2の面振れ量を検出できれば、周縁端に並んで配置されていても良い。
【0019】
位置センサ8は、周知のウエハ2の偏心量を検出するための透過型の検出器であり、ウエハ端面部を挟んで対向して発光素子と受光素子を備えている。回転テーブル12の回転軸13により回転されているウエハ2の端面部に光を照射し、端面部から遮られることなく受光される光量を検出する。
【0020】
なお、位置センサ8は受光部と送光部が一体にウエアは端面部の同じ側に配置された反射型の検出器であってもよい。また、オートフォーカス機能を搭載していれば、これにより偏心による合焦ズレに対応してもよい。
また、位置センサ9は、周知の光学式の測長センサであり、回転するウエハ2における面振れ量(位置センサ9からウエハ2の主面までの距離の変動)を検出する。
【0021】
移動機構6(移動機構または撮像装置移動機構)は、光学モジュール14を装着している。そして位置センサ8及び位置センサ9により検出された偏心量及び面振れ量に基づき補正するように移動させる駆動機構を備えている。つまり、光学モジュール14を光軸方向の前後に高速微小移動する第1の駆動機構と光学モジュール14をウエハ2の主面と垂直な軸方向(基板の法線方向)の前後(上下)に高速微小移動する第2の駆動機構とを備えている。なお、これらの偏心量及び面振れ量を補正する移動機構は、移動機構6と別体であってもよい。
【0022】
回転テーブル12は、ウエハ2の裏面を吸着保持する円形のステージである。ウエハの載置部は外周緑に沿って壁部が形成され、その壁部がウエハ2の裏面に接触する。その内径側にはピンが多数配設され、ウエハの裏面が平面になるよう支える、回転テーブル12の直径は、基板の直径より小さくウエハ裏面の端面部の観察が可能となっている。裏面の端面部が最小限観察できる程度として、できるだけ大きな略ウエハの直径と同等とすることが望ましい。特にテーブル直径をウエハ直径の90%以上とし、テーブルの全面を吸着可能な構成とすれば、ウエハの反りによる観察位置のズレを防止できる。ロボットアームにてウエハを受け渡すために、テーブルの中央部に複数のピンやテーブルが昇降する機構が設けられていても良い。
【0023】
そして、回転軸13は図示しないモータにより回転し、載置部が回転する。また、回転角度を検出するエンコーダが搭載されていて、角度を検出し制御部に伝送できるようになっていてもよい。この回転テーブル12は周知の外観検査装置の顕微鏡を用いたミクロ検査部の回転XYステージと共通のものであってもよい。
【0024】
ベース10は、図示しない架台部に設置された板状部材であり、その平面上にガイドレールが配設される。そしてガイドレールを介して移動機構6が回動可能に設置される。
制御部11は、ウエハの回転時の偏心やウエハの反りによる面振れによる合焦ズレや位置ズレを補正したり、適正な角度観察できるように回動動作を行ったりなど観察装置全体の制御を行う。移動機構制御部7と画像処理部4とを一体に含み、それらはパーソナルコンピュータからなっていてもよい。また、制御部11には、ウエハ2の回転時の偏心量やノッチ位置を検出するための予め測定されたデータテーブル等が登録されている。
【0025】
次に移動機構6の回動移動について説明する。図2に示すように、ベース10は、円弧形状のガイドレール18を配設している。そして移動機構6は、このガイドレール18上をリニアモータ等のモータ駆動により回動移動するように構成されている。つまり、移動機構6は、第3の駆動機構として回動移動機構を備えている。ここで回動軸は、点Oを通り回転テーブル12の回転軸と撮像光学系の光軸を含む面に垂直となっている。つまり、ワイパーのように振られる(回動移動する)アーム機構を設けて、このアーム機構上に移動機構6を配置するようにしても良い。
【0026】
他にも、撮像光学系1の光軸が回転テーブル12の回転の中心軸と光学モジュール14による光軸を含む平面内で点Oを中心に回動するならば、種々の機構により回動移動を実現することは可能である。
【0027】
また回動軸の位置は撮像光学系1の光軸がウエハ2の端面に到達した位置よりややウエハの内側に入り込んだ位置にある。図2(b)に示すように、回動軸の位置は、この回動軸を中心に回動をしたときの撮像光学系1の光軸が端面、表面、裏面の面取り部に対して直交し、点O(回動軸)からの距離が等しくなるように設定されている。これにより回動移動を行っても、撮像光学系1の合焦位置を端面または面取り部に設定すれば端面部と撮像光学系1の距離がほぼ一定に保つことができる。
【0028】
面取りの形状によっては、端面部と撮像光学系1の距離がほぼ一定とならず、光学モジュールの被写界深度から外れる場合は、オートフォーカス機構により合焦距離を調整して対応しても良い。
【0029】
また、移動機構6は、ウエハの主面に直交する軸方向に所望するまたは設計に基づく回動振り角度で回動移動する。その回動角度範囲は、90°から180°程度あることが望ましく、特にウエハ表面のリンスカット量を観察するには主面に垂直方向から観察できる角度範囲であることが望ましい。
【0030】
以上により撮像光学系1の光軸がウエハ2の表面から端面を経て裏面に、または裏面から端面を経て表面に移動することとなる。これにより本実施の形態の観察装置の光学モジュール14は、点Oを通る回動軸を中心として、ウエハ2の端面とこの端面に繋がる表裏面を連続的に撮像光学系1の観察視野に入れることができる。
【0031】
次に光学モジュール14の構成例を示して説明する。図3は、ウエハ2の主面の法線方向から光学モジュール14を見た図である。光学モジュール14は、レンズマウント本体21に撮像光学系1及び撮像部3が搭載されて構成される。撮像光学系1及び撮像部3は、共にマウントネジ等を用いて容易に着脱自在できるようにレンズマウント本体21に取り付けられている。さらにレンズマウント本体21は、移動機構6上に取り付けられている。
【0032】
撮像光学系1としては、対物レンズ22と、ハーフミラー23と、結像レンズ24とで構成され、ハーフミラー23により対物レンズ22の光軸が90°偏向され、結像レンズ24に向かうように配置される。対物レンズ22は、ウエハ2の端面、表面裏面の斜め方向からの観察時、1つの対物レンズが用いられる。また、必要により、倍率の異なる複数の対物レンズを用いてもよい。
【0033】
また、対物レンズ22から見てハーフミラー23の後方には、照明光を集光するためのレンズ25及び照明光を出射する発光ダイオード(LED)26がレンズマウント本体21に着脱自在に取り付けられている。LED26は、ウエハ2の端面が十分な明るさで撮像できる光量と指向性を有している。
【0034】
また、LED26が出射した照明光が検査に悪形響を与えないように外部への濡れを防止するための遮光カバー27がLED26を覆うように適宜設けられている。更に、照明は対物レンズ2の鏡体の周辺部に複数のLED照明29を設けている。またLED26の周りにはリング照明19を設けており、適宜観察し易い照明を選択できるようになっている。つまり、LED26による同軸落斜照明、LED照明29による観察光学系の側方から斜照明、リング照明19による暗視野照明を用いて個々の観察や複数の複合された照明下での観察を行うこともできる。
【0035】
次に、このように構成された観察装置の動作について説明する。まず、LED26から出射された照明光は、レンズ25で集光される。そしてハーフミラー23を透過し、さらに対物レンズ22から観察対象となるウエハ2に平行光束として照射される。ウエハ2で反射された光は、対物レンズ22へ入射する。対物レンズ22からの光束は、ハーフミラー23で偏向され、結像レンズ24に向かう。結像レンズ24では光束を撮像部3内の撮像素子(CCD)28の受光面に結像する。撮像素子28は、光電変換によりウエハ2の端面部の画像信号を生成する。画像処理部4は、生成された画像信号に対して予め設定されたアプリケーションソフトウエアに基づき種々の画像処理を施して画像データを生成して表示部5に後述する画面構成で画像データを表示する。
【0036】
また、回転テーブル12に載置されたウエハ2の中心が、回転中心の軸に対し偏心し、さらにウエハ2に反りが発生していた場合についての補正動作を説明する。ここでは、図2の実線のように光学モジュール14は、端面を観察するよう回転テーブル12の回転の中心軸に垂直な方向に光軸が向くよう配置されているものとする。
【0037】
まず、回転テーブル12が回転を開始したとき、位置センサ8は、その時点での検出光量の信号をリアルタイムに制御部11に伝達する。ウエハ2は偏心しているので、位置センサ8を遮る光量が変化する。センサを制御する制御部11は、位置センサ8から受け取った光量の信号をもとにデータテーブルからウエハ2の偏心量(変動量)を求める。そして制御部11は、求められた偏心量を補正するための移動機構の第1の駆動機構の移動量を算出して移動機構制御部7に指示を出す。移動機構制御部7は、受け取った補正のための移動量の信号をもとに移動機構6の第1の駆動機構を制御して常にウエハ端面と撮像光学系1の距離が一定となるようにする。つまり、合焦状態を保った状態の端面の画像が表示部に表示される。
【0038】
同様に位置センサ9は、その時点の位置センサ9とウエハ端面部(主面の周縁部)の距離の信号をリアルタイムに制御部11に伝達する。ウエハ2は反りを起こしているので、位置センサ9は検出する距離が変化する。制御部11は、位置センサ9から受け取った距離(面振れ量、変動量)の信号をもとにデータテーブルからウエハ2の端面との距離を求める。求められた距離の変化を補正するための移動機構の第2の駆動機構の移動量を算出して、移動機構制御部7に指示を出す。移動機構制御部7は、受け取った補正のための移動量の信号をもとに移動機構6の第2の駆動機構を制御して常に位置センサ9とウエハ端面部(主面の周縁部)の距離が一定となるようにする。つまり、端面部の画像が表示部上の一定な位置に表示される。
【0039】
なお、光学モジュール14の位置を図2(a)の実線の位置としたが、例えば、ウエハ2の主面に垂直な方向にある場合は、第1の駆動機構と第2の駆動機構の最終的な作用である「合焦状態を保った状態の端面の画像が表示部に表示される」と「端面部の画像が表示部上の一定な位置に表示される」が入れ替わる。また、斜めから観察する位置にある場合は、第1の駆動機構と第2の駆動機構とが同時に作用して合焦状態を保った状態の端面の画像が表示部に表示される」と「端面部の画像が表示部上の一定な位置に表示される」ことが同時に行われる。以上により、光学モジュール14がどの回動位置にあっても、ウエハ2の端面部と撮像光学系の相対的な位置が一定に保たれ、相対的な距離と観察光軸の角度がほぼ一定に保たれるので表示部の表示画面上に端面部が一定の位置を保ち合焦した状態で表示することができる。
【0040】
また、これらの動作は高速に行われるので、表示部を観察する限りでは認識されない。ノッチ部に関しては、位置センサ8では大きな光量の変化となるので、大きな光量変化をノッチ部と認織し、移動機構6を動作させないようにしても良い。また、ウエハ2が微小な反りであり、回動移動機構で対応できるならば、第2の駆動機構の代わりに回動移動機構により回動移動を行っても良い。また、本実施の形態の説明では、リアルタイムに、位置の変動を検出して補正するとしたが、回転テーブル12が回転角度を検出するエンコーダを備えていて予め360°回転、つまり一回転してノッチ位置、面振れ量と偏心量のデータを取得して補正量を記憶してから、回転テーブル12の回転角度毎に偏心、面振れを補正しながら撮像するようにしてもよい。
【0041】
本第1の実施の形態では、光学モジュール14を設置する移動機構6が回転テーブル12の回転軸と撮像光学系の光軸を含む面内で移動させるようにしたので、構成が簡単な回転テーブルが設置されているだけで単独の端面欠陥検査装置として用いることができる。また、一般的な回転テーブルを備える装置の回転テーブル近傍に、本観察装置の回転テーブル12を除いて配設することで、専用の端面欠陥検査装置を導入しなくても端面欠陥検査装置として用いることができるので、容易で安価に端面欠陥検出装置を構築することができる。
【0042】
次に本発明の第2の実施の形態について、図4を参照して詳細に説明する。
図4は、本発明の第2の実施の形態の観察装置を基板の法線方向から見た概略構成を示す図である。本第2の実施の形態の観察装置は、基板の外観検査装置に備えられている回転可能なXY回転ステージを回転テーブル12として共用したものとして説明する。
【0043】
ここでば、第1の実施の形態と異なる構成についてのみ説明し、共通な構成については省略する。第1の実施の形態からの変更点は、移動機構6の第1の駆動機構が省略されたこと、回転テーブル12の回転軸13がXYステージ部15(移動機構または保持部移動機構)に設置されること(これにより回転テーブル12は、XY平面内で移動可能となる)、移動機構であるXYステージ15のX方向の移動が端面部の観察時に移動機構制御部7を介して制御部11により制御されることである。
【0044】
これは第1の実施の形態における移動機構6の第1の駆動機構の移動をXYステージ15のX方向の移動へ置き換えたものと考えればよい。
【0045】
本第2の実施の形態では、XY回転ステージをもつ装置に本観察装置を追加装着することにより移動機構を省略でき、安価に端面欠陥検査装置を構築することができる。
【0046】
変形例として、移動機構6の第1、第2の駆動機構が省略され、かつ、回転ステージ12の移動機構であるXYステージ15(移動機構または保持部移動機構)の移動方向がXY平面に加え、Z軸方向にも移動可能な機構を備え、移動機構制御部7を介して制御部11によりX、Z方向に移動制御されるように構成しても良い。
【0047】
第1の実施の形態の移動機構6の第1の駆動機構の移動をXYステージ15のX方向の移動へ移動機構6の第2の駆動機構の移動をXYステージ15のZ方向の移動へ置き換えたものとなる。第2の実施の形態と同様に、XYZ回転ステージをもつ装置に追加装着すれば、移動機構を省略でき、安価に端面欠陥検査装置を実現することができる。
【0048】
図5は、本発明における表示部に表示する画像データの画面構成例を示す。図5に示すように、処理された画像データやこの画像データに関する情報を表示部5の画面30に分けて表示する。この画面構成では、観察対象物であるウエハ2の外周端部における、表斜め面(主面表面)画像31、端面(側面)画像32、裏斜め面(主面裏面)画像33の3個所のそれぞれ画像が同時に並べて表示している。この複数同時画像表示は、例えば、多チャンネル対応の画像ボード等を用いることにより容易に実現できる。また、ウエハ斜め面の画像の上下部分は非合焦画像(ボケ画像)となるので、その部分をカットすることにより、SXGA(Super Extended Graphic Array)クラスの表示部5に3箇所の画像を同時表示することができる。
【0049】
これらの画像表示領域の横には、種々の動作を指示するための操作画像が表示される。この操作画像としては、例えば、照明切換指示画像(ボタン像)34、位置表示画像(ウエハ上の位置表示)35、ウエハ2の回転開始指示画像(ボタン像)36、画像保存指示画像(ボタン像)37及び画像の正転逆転指示画像(ボタン像)38がある。勿論、図示される指示操作だけに限定されるものではなく、所望する操作の指示画像を追加して表示するまたは、不要な指示画像を削除することができる。
【0050】
この指示画像の例では、保存したい画像が表示されているときに、画像保存指示画像のボタン像37をタッチすることにより観察画像保存が行われる。また、回転開始指示画像のボタン像36をタッチすることにより、回転テーブル12に載置されるウエハ2を回転制御することができる。さらに、正転逆転指示画像のボタン像38にタッチすることにより、回転テーブル12の回転を正転または逆転させることができる。ウエハ2に設けられたノッチを基準位置として、外周端部の位置情報(角度、位置)を表示することができる。
【0051】
上述したように本観察装置は、撮像光学系が変倍機構を持てば、低倍率から高倍率域の画像をリアルタイム表示や画像保存もできる。ウエハのノッチ基準を基準とした位置情報を検出された欠陥や異物等の画像情報と併せて保存することもでき、不良解析に役立つ。さらに、観察照明方向を切換えることにより、異物や欠陥を探す上で、観察性能を選択できるため、異物原因を特定し易い。また、位置センサにより観察対象物の変動を検出して位置補正することから、撮像された画像における観察位置が変動せず、合焦画像が得られるため観察しやすい。
【0052】
なお、本発明の観察装置は3つの光学モジュールを備え、それぞれに画像処理部を設けて、表示部に同時表示する構成とすれば、3方向からの画像を同時に撮像できる観察装置または端面欠陥検査装置とすることもできる。
【0053】
また、撮像部3により撮像された画像信号は、予め画像処理部4に格納されるアプリケーションソフトウエアにより表示部に表示される端面部の位置処理が一定になるよう画像処理が施されてもよい。例えば、図2の実線の位置に光学モジュール14を配置した場合に、端面部の表示部への表示位置が一定になるようにする。画像回転テーブル12よりウエハ2を回転させてもアライメント精度が出ていて偏心が少なく合焦された画像となっているとき、ウエハ2の反りによるが表示部5上の端面部の位置が回転に合わせて波打つなどの変動のみを抑える処理を行うときは、画像信号の端面部による輝度の境目が常に表示部5の一定になるように位置を再構築して表示してもよい。また、位置センサ8、9からの信号をもとに光学モジュール14とウエハ2の端面部との相対的な位置を検出し、その検出されたデータをもとに画面上の位置と検出された位置関係から端面部の画像が表示部の一定の位置に表示されるよう画像処理するようにしてもよい。このようにすれば、リアルタイムに位置ずれのない画像を観察することができる。
【図面の簡単な説明】
【0054】
【図1】第1の実施の形態の観察装置を基板の法線方向から見た概略構成を示す図である。
【図2】第1の実施の形態の観察装置をウエハの法線方向に直行する方向から見た側面図である。
【図3】第1の実施の形態の観察装置の光学モジュール14の構成例を示す図である。
【図4】第2の実施の形態の観察装置を基板の法線方向から見た概略構成を示す図である。
【図5】表示部に表示する画像データの画面構成例を示す図である。
【符号の説明】
【0055】
1…撮像光学系、2…観察対象物(シリコンウエハ)、3…撮像部、4…画像処理部、5…表示部、6…移動機構、7…移動機構制御部、8,9…位置センサ、10…ベース、11…制御部、12…回転テーブル、13…回転テーブルの回転軸、14…光学モジュール、21…レンズマウント本体、22…対物レンズ、23…ハーフミラー、24…結像レンズ、25…レンズ、26…発光ダイオード(LED)、27…遮光カバー、28…撮像素子(CCD)。
【特許請求の範囲】
【請求項1】
基板の端面部を撮像する撮像装置と、
前記基板を保持するとともに、該基板の法線方向を回転の中心軸として回転可能な保持部と、
前記保持部の回転によって発生する前記基板の端面部の位置の変動量を検出する変位検出部と、
前記撮像装置で撮像された画像を表示する表示部と、
前記変位検出部からの信号をもとに前記撮像装置で撮像された前記基板の端面部の画像が前記表示部上の一定の位置に観察されるように制御する制御部と、
を備えることを特徴とする観察装置。
【請求項2】
前記基板の端面部と前記撮像装置の相対的な位置を一定に保つ移動機構を備え、
前記制御部は、検出された前記基板の端面部の位置の変動量から前記撮像装置と前記基板の端面部との相対的な位置を一定に保つように前記移動機構の制御を行うことを特徴とする請求項1に記載の観察装置。
【請求項3】
前記移動機構は、前記撮像装置を前記回転の中心軸と前記撮像装置の光軸を含む平面内で移動可能とする撮像装置移動機構であり、この撮像装置移動機構は、前記制御部により前記端面部の画像が前記表示部の一定の位置に観察されるように制御されることを特徴とする請求項2に記載の観察装置。
【請求項4】
前記移動機構は、前記回転の中心軸と前記撮像装量の光軸を含む平面内で移動可能とする保持部移動機構であり、この保持部移動機構は、前記制御部により前記端面部の画像が前記表示部の一定の位置に観察されるように制御されることを特徴とする請求項2に記載の観察装置。
【請求項5】
前記撮像装置は、その光軸が常にある一点を通り、前記ある一点を中心として前記回転軸と前記撮像装置の光軸を含む平面内で回動可能とする撮像装置移動機構を備えることを特徴とする請求項1から4のいずれか一項に記載の観察装置。
【請求項6】
前記撮像装置は、前記基板の端面、端面付近の表裏面、表裏面取り部のうち少なくとも2面を同時観察可能なように複数備えられていることを特徴とする請求項1から4のいずれか一項に記載の観察装置。
【請求項7】
前記撮像装置は、その光軸の方向に移動可能とする撮像装置の移動機構を備えることを特徴とする請求項1に記載1から6のいずれか一項に記載の観察装装置。
【請求項8】
前記変位検出部は、前記基板の端面部の該基板の法線方向への変位を検出することを特徴とする請求項1から7のいずれか一項に記載の観察装置。
【請求項9】
前記変位検出部は、前記基板の端面部の該基板の法線方向と直行する方向への変位を検出することを特徴とする請求項1から8のいずれか一項に記載の観察装置。
【請求項10】
前記制御部は、前記変位検出部からの信号をもとに前記撮像装置と前記基板の端面部との相対的な位置を検出し、前記端面部の画像が前記表示部の一定の位置に表示されるように画像処理を行うことを特徴とする請求項1に記載の観察装置。
【請求項11】
前記制御部に欠陥抽出の機能を有し、請求項1から10のいずれか一項に記載の観察装置を備えたことを特徴とする端面欠陥検査装置。
【請求項1】
基板の端面部を撮像する撮像装置と、
前記基板を保持するとともに、該基板の法線方向を回転の中心軸として回転可能な保持部と、
前記保持部の回転によって発生する前記基板の端面部の位置の変動量を検出する変位検出部と、
前記撮像装置で撮像された画像を表示する表示部と、
前記変位検出部からの信号をもとに前記撮像装置で撮像された前記基板の端面部の画像が前記表示部上の一定の位置に観察されるように制御する制御部と、
を備えることを特徴とする観察装置。
【請求項2】
前記基板の端面部と前記撮像装置の相対的な位置を一定に保つ移動機構を備え、
前記制御部は、検出された前記基板の端面部の位置の変動量から前記撮像装置と前記基板の端面部との相対的な位置を一定に保つように前記移動機構の制御を行うことを特徴とする請求項1に記載の観察装置。
【請求項3】
前記移動機構は、前記撮像装置を前記回転の中心軸と前記撮像装置の光軸を含む平面内で移動可能とする撮像装置移動機構であり、この撮像装置移動機構は、前記制御部により前記端面部の画像が前記表示部の一定の位置に観察されるように制御されることを特徴とする請求項2に記載の観察装置。
【請求項4】
前記移動機構は、前記回転の中心軸と前記撮像装量の光軸を含む平面内で移動可能とする保持部移動機構であり、この保持部移動機構は、前記制御部により前記端面部の画像が前記表示部の一定の位置に観察されるように制御されることを特徴とする請求項2に記載の観察装置。
【請求項5】
前記撮像装置は、その光軸が常にある一点を通り、前記ある一点を中心として前記回転軸と前記撮像装置の光軸を含む平面内で回動可能とする撮像装置移動機構を備えることを特徴とする請求項1から4のいずれか一項に記載の観察装置。
【請求項6】
前記撮像装置は、前記基板の端面、端面付近の表裏面、表裏面取り部のうち少なくとも2面を同時観察可能なように複数備えられていることを特徴とする請求項1から4のいずれか一項に記載の観察装置。
【請求項7】
前記撮像装置は、その光軸の方向に移動可能とする撮像装置の移動機構を備えることを特徴とする請求項1に記載1から6のいずれか一項に記載の観察装装置。
【請求項8】
前記変位検出部は、前記基板の端面部の該基板の法線方向への変位を検出することを特徴とする請求項1から7のいずれか一項に記載の観察装置。
【請求項9】
前記変位検出部は、前記基板の端面部の該基板の法線方向と直行する方向への変位を検出することを特徴とする請求項1から8のいずれか一項に記載の観察装置。
【請求項10】
前記制御部は、前記変位検出部からの信号をもとに前記撮像装置と前記基板の端面部との相対的な位置を検出し、前記端面部の画像が前記表示部の一定の位置に表示されるように画像処理を行うことを特徴とする請求項1に記載の観察装置。
【請求項11】
前記制御部に欠陥抽出の機能を有し、請求項1から10のいずれか一項に記載の観察装置を備えたことを特徴とする端面欠陥検査装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2007−240264(P2007−240264A)
【公開日】平成19年9月20日(2007.9.20)
【国際特許分類】
【出願番号】特願2006−61518(P2006−61518)
【出願日】平成18年3月7日(2006.3.7)
【出願人】(000000376)オリンパス株式会社 (11,466)
【Fターム(参考)】
【公開日】平成19年9月20日(2007.9.20)
【国際特許分類】
【出願日】平成18年3月7日(2006.3.7)
【出願人】(000000376)オリンパス株式会社 (11,466)
【Fターム(参考)】
[ Back to top ]