
観測装置および観測対象推定装置
【課題】移動を伴う多観測角観測装置を用いて被観測体の推定精度を向上させることを目的とする。
【解決手段】多観測角観測装置100はコニカルスキャン方式の移動を伴う観測装置である。多観測角観測装置100は観測角が異なる第一アンテナ131〜第四アンテナ134を備える。観測角が小さいアンテナほど下側に設置し、観測角が大きいアンテナほど上側に設置する。また、設置位置が下であるアンテナほど支持棒の長さを短くし、設置位置が上であるアンテナほど支持棒の長さを長くする。制御装置110は第一回転軸121〜第四回転軸124を第一アンテナ131〜第四アンテナ134それぞれの観測角に応じて異なる速度で回転させる。制御装置110は第一アンテナ131〜第四アンテナ134で受信した観測角が異なる複数の観測信号に基づいて被観測体を推定する。
【解決手段】多観測角観測装置100はコニカルスキャン方式の移動を伴う観測装置である。多観測角観測装置100は観測角が異なる第一アンテナ131〜第四アンテナ134を備える。観測角が小さいアンテナほど下側に設置し、観測角が大きいアンテナほど上側に設置する。また、設置位置が下であるアンテナほど支持棒の長さを短くし、設置位置が上であるアンテナほど支持棒の長さを長くする。制御装置110は第一回転軸121〜第四回転軸124を第一アンテナ131〜第四アンテナ134それぞれの観測角に応じて異なる速度で回転させる。制御装置110は第一アンテナ131〜第四アンテナ134で受信した観測角が異なる複数の観測信号に基づいて被観測体を推定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、上空から移動を伴って地上の観測対象をアクティブ/パッシブ方式にかかわらず観測する観測装置、例えば、航空機や人工衛星搭載型のカメラやレーダ、観測対象を推定する観測対象推定装置に関するものである。
【背景技術】
【0002】
従来、航空機や人工衛星等の移動体をプラットフォームとする観測装置は、観測対象エリアの任意の地点について1つの観測角でしか観測できなかった。なお、観測角とは、移動体から地面への垂線と、移動体と観測対象エリア中の一点を結ぶ線からなる角度である。
また、被観測体を観測して得られる観測信号は、システムの熱雑音、移動体自身の姿勢や軌道の変動、及び観測エリアの地形などの影響を受けて実際の値と異なる信号強度を示してしまう。
【0003】
観測信号の信号強度は、対象の材質や形状のみならず、観測角に強く依存することが知られている。
このため、特定の観測角で観測された1つの観測信号に基づいて被観測体の材質や形状等の物理情報を特定することは困難である。
【0004】
従来、移動体をプラットフォームとするコニカルスキャン方式と呼ばれる観測装置が知られている。
コニカルスキャン方式の観測装置はアンテナ回転軸を回転させることにより観測地点をアンテナで走査して観測を行う。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2006−270806号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明は、例えば、合成開口レーダによる被観測体の推定精度を向上させることを目的とする。
【課題を解決するための手段】
【0007】
本発明の観測装置は、
観測対象に対して互いに異なる方向から送信信号を送信し、観測対象から観測信号を互いに異なる方向から受信する複数のアンテナと、
軸方向に長さを有し、複数のアンテナを長さ方向の異なる位置に取り付け、長さ方向を軸にして回転するアンテナ回転軸と、
複数のアンテナそれぞれの送信信号を生成し、複数のアンテナが取り付けられた前記アンテナ回転軸を回転させ、複数のアンテナによって異なる方向から送信信号を送信し、複数のアンテナによって異なる方向から観測信号を受信し、複数のアンテナによって受信した複数の観測信号を記憶する制御装置とを備える。ここで、複数のアンテナは、送信/受信機能を兼ねる。ただし、例えば、カメラや放射計のようなパッシブ方式の観測システムを実現したい場合は、送信信号生成部は除外され、複数アンテナの送信機能も除外される。
【0008】
前記アンテナ回転軸は、アンテナを取り付けるアンテナ取付部をアンテナ毎に有し、アンテナ取付部毎に回転し、
前記制御装置は、前記アンテナ回転軸をアンテナ取付部毎に異なる速さで回転させる。
【0009】
前記制御装置は、各アンテナ取付部をアンテナ取付部に取り付けられたアンテナが観測信号を受信する方向が下向きであるほど早く回転させる。これは、複数の送受信アンテナの互いの方向が異なり、移動体からそれぞれのアンテナに対する観測地点への距離が異なることによる。
【0010】
複数のアンテナは上に位置するものほどアンテナ取付部からの距離が遠く、
複数のアンテナは下に位置するものほど観測信号の受信方向が下向きである。
【0011】
前記制御装置は複数のアンテナそれぞれに対して送信信号の送信方向と、観測信号の受信方向を変化させる。
【0012】
前記制御装置は、観測信号の受信方向と観測信号の信号強度との関係を表すプロファイルデータを参照プロファイルとして地物の種類毎に記憶し、複数のアンテナで受信した複数の観測信号に基づいてプロファイルデータを観測プロファイルとして生成し、生成した観測プロファイルを参照プロファイルと比較して前記観測対象の種類を特定する。
【0013】
本発明の観測装置は、
観測角が異なる複数のアンテナを備え、複数のアンテナを用いてコニカルスキャン方式で観測対象を観測する。
【0014】
本発明の観測対象推定装置は、
観測信号の観測角と観測信号の信号強度との関係を表すプロファイルデータを参照プロファイルとして地物の種類毎に記憶し、観測対象を観測して得られた複数の観測信号情報であって観測角が異なる複数の観測信号を表す複数の観測信号情報を記憶する観測データ記憶部と、
前記観測データ記憶部に記憶された複数の観測信号情報に基づいてプロファイルデータを観測プロファイルとして生成する観測プロファイル生成部と、
前記観測プロファイル生成部により生成された観測プロファイルを参照プロファイルと比較して前記観測対象の種類を推定する観測対象推定部とを備える。
【発明の効果】
【0015】
本発明によれば、例えば、複数のアンテナを用いて異なる観測角で複数の観測信号を受信することができる。
観測角が異なる複数の観測信号を得られることにより、被観測体(観測対象)の推定精度を向上させることができる。
【図面の簡単な説明】
【0016】
【図1】実施の形態1における多観測角観測装置100の外観図。
【図2】従来のコニカルスキャン方式の観測装置801の外観図。
【図3】従来のコニカルスキャン方式の観測装置801を用いた観測方法を示す図。
【図4】従来のコニカルスキャン方式の観測装置801によって得られる観測データの一例を示す図。
【図5】実施の形態1における多観測角観測装置100の観測方法を示す図。
【図6】実施の形態1における多観測角観測装置100の観測方法を示す図。
【図7】実施の形態1において多観測角観測装置100により得られる観測データの一例を示す図。
【図8】実施の形態1における制御装置110の機能構成図。
【図9】従来のプッシュブルーム方式のパッシブ観測装置802を用いた観測方法を示す図。
【図10】従来のプッシュブルーム方式のパッシブ観測装置802によって得られる観測データの一例を示す図。
【発明を実施するための形態】
【0017】
実施の形態1.
上空から移動を伴って地上の観測対象を観測する観測装置について説明する。
【0018】
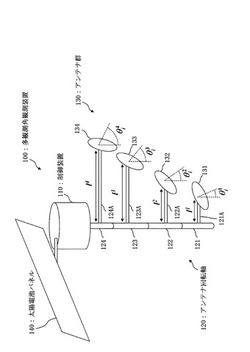
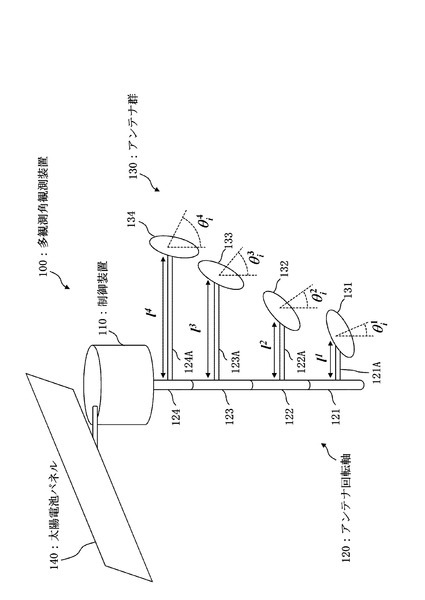
図1は、実施の形態1における多観測角観測装置100の外観図である。
実施の形態1における多観測角観測装置100(観測装置の一例)の構成について、図1に基づいて以下に説明する。
【0019】
多観測角観測装置100は、観測角が異なる複数のアンテナ(アンテナ群130)を備えたコニカルスキャン方式の観測装置である。
【0020】
ここで、従来のコニカルスキャン方式の観測装置について図2〜図4に基づいて説明する。
【0021】
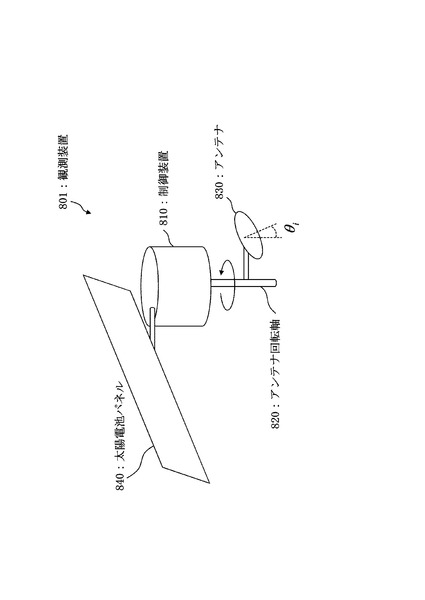
図2は、従来のコニカルスキャン方式の観測装置801の外観図である。
図3は、従来のコニカルスキャン方式の観測装置801を用いた観測方法を示す図である。
図4は、従来のコニカルスキャン方式の観測装置801によって得られる観測データの一例を示す図である。
【0022】
図2において、従来のコニカルスキャン方式の観測装置801は、制御装置810、アンテナ回転軸820、アンテナ830および太陽電池パネル840を備える。
【0023】
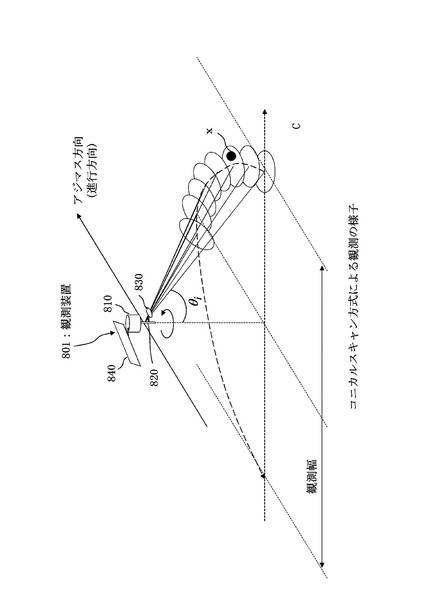
図3において、従来の観測装置801は航空機、人工衛星その他の移動体(飛行体)に搭載され、上空を飛行する。
従来の観測装置801の進行方向を「アジマス方向」という。
【0024】
従来の観測装置801の制御装置810はアンテナ回転軸820を回転させる。
アンテナ回転軸820には一つのアンテナ830が斜め下向きに取り付けられ、アンテナ830は斜め下方から電磁波を送受信し、制御装置810はアンテナ830が受信した電磁波の情報を記憶する。
以下、アンテナ830が受信する電磁波を「観測信号」という。
【0025】
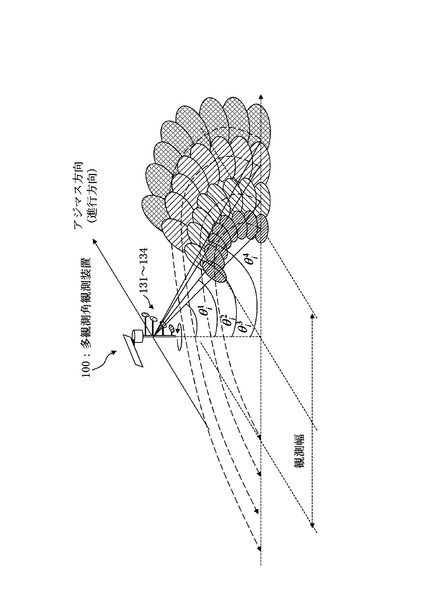
アンテナが観測信号を受信する受信方向を「観測角θi」という。観測角θiは観測信号の進行方向と垂直方向とが成す角度を示す。観測角θiは入射角またはオフナディア角(入射角≒オフナディア角)とも呼ばれる。
アンテナ回転軸820を回転させることにより観測信号を観測できる領域の幅を「観測幅」という。
【0026】
アンテナ830の取り付け角度(またはアンテナの指向性)が変わらなければ、観測信号の観測角θiは一定である。
つまり、従来の観測装置801は観測角θiでしか観測信号を得られない。
【0027】
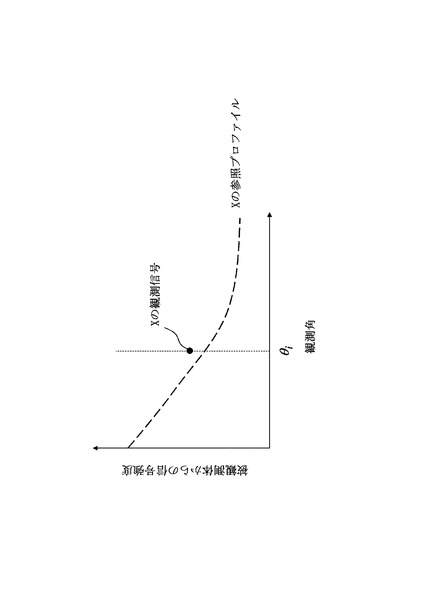
例えば、観測信号の信号強度と観測角との関係を表すグラフを作成した場合、被観測体xの観測信号は観測角θi上にプロットされる(図4参照)。
【0028】
図4において、被観測体xの参照プロファイルは、被観測体xの観測信号の信号強度を観測角毎に実験的または理論的に求めたグラフデータ(関数データ)である。
観測信号の信号強度は、観測信号の観測角および被観測体(観測対象)の材質、形状や状態によって異なる。
参照プロファイルは、被観測体の材質、形状や状態によって異なる。
【0029】
合成開口レーダ801による観測は熱雑音(ノイズ)、姿勢変動、軌道変動などの影響を受けるため、従来の観測装置801により得られる観測信号は誤差を含み、参照プロファイルと異なる信号強度を示す。
【0030】
図1に戻り、実施の形態1における多観測角観測装置100の説明を続ける。
【0031】
多観測角観測装置100(観測装置の一例)は、制御装置110、アンテナ回転軸120、アンテナ群130および太陽電池パネル140を備える。
【0032】
アンテナ回転軸120は、軸方向(長さ方向、上下方向)で4つに分割されている。
以下、アンテナ回転軸120の分割部分を下から順に第一回転軸121、第二回転軸122、第三回転軸123および第四回転軸124という。
【0033】
第一回転軸121〜第四回転軸124(アンテナ取付部の一例)は別々に回転する。
第一回転軸121〜第四回転軸124はそれぞれに支持棒121A〜124Aを有する。
【0034】
支持棒121A〜支持棒124Aは互いに異なる長さlを有し、下に位置する支持棒ほど短く、上に位置する支持棒ほど長い。
支持棒121A〜支持棒124Aの先端にはアンテナ群130のアンテナが取り付けられている。
以下、支持棒121A〜支持棒124Aに取り付けられているアンテナを支持棒の順に、第一アンテナ131、第二アンテナ132、第三アンテナ133および第四アンテナ134という。
【0035】
第一アンテナ131〜第四アンテナ134は互いに異なる角度で取り付けられ、互いに異なる観測角θiを有する。但し、第一アンテナ131〜第四アンテナ134は互いに異なる指向性を持つことにより、互いに異なる観測角θiを有しても構わない。
第一アンテナ131〜第四アンテナ134は下に位置するアンテナほど下向きであり、上に位置するアンテナほど上向き(横向き)である。下向き、上向きとはアンテナの取り付け角度または指向方向を意味している。
第一アンテナ131〜第四アンテナ134は下に位置するアンテナほど観測角θiが小さく、上に位置するアンテナほど観測角θiが大きい。
【0036】
太陽電池パネル140は、太陽光を受けて発電し、得られた電力を制御装置110に供給する。
【0037】
制御装置110は、第一回転軸121〜第四回転軸124をそれぞれに異なる角速度(回転速度)で回転させる。
【0038】
第一アンテナ131〜第四アンテナ134は下向きであるほど観測地点との距離が短く、上向き(横向き)であるほど観測点との距離が長い。そのため、観測信号を発信して観測点で反射した観測信号を受信するアクティブ方式の観測において、観測信号を発信してから受信するまでに要する観測信号の伝播時間はアンテナ毎に異なる。
そこで、制御装置110は、第一アンテナ131〜第四アンテナ134それぞれの観測角θi(または取り付け角、指向方向)に基づいて観測点との距離を算出し、観測点との距離に基づいて観測信号の伝播時間を算出し、観測信号の伝播時間に基づいて第一回転軸121〜第四回転軸124それぞれの角速度を算出する。
制御装置110により算出される角速度は、第一アンテナ131〜第四アンテナ134それぞれが観測点で反射した観測信号を受信できる程度の速さである。
【0039】
制御装置110は、各回転軸の回転速度を独立に制御できるが、通常、下に位置する回転軸ほど速く回転させ、上に位置する回転軸ほど遅く回転させる。
つまり、制御装置110は、通常、第一アンテナ131〜第四アンテナ134をアンテナ回転軸120に対して下向きのアンテナほど速く回転させ、上向き(横向き)のアンテナほど遅く回転させる。
【0040】
図5、図6は、実施の形態1における多観測角観測装置100の観測方法を示す図である。
実施の形態1における多観測角観測装置100の観測方法について、図5および図6に基づいて以下に説明する。
【0041】
図5に示すように、多観測角観測装置100は、第一アンテナ131〜第四アンテナ134を用いて4つの観測角θi1〜θi4で信号を送信、および観測信号を受信する。
これにより、多観測角観測装置100は、第一アンテナ131(観測角θi1)の観測幅の領域内であれば、どの観測点からでも4つの観測角θi1〜θi4で信号を送信、および観測信号を受信することができる。
【0042】
例えば、多観測角観測装置100は、第一アンテナ131の観測幅の領域内に位置する被観測体xに対し、以下のように信号を送信、および観測信号を受信する。
【0043】
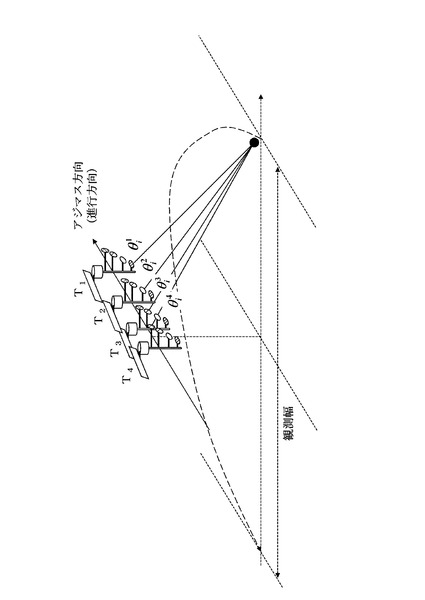
図6において、多観測角観測装置100は、第四アンテナ134で観測角θi4の観測信号を受信し(時刻T4)、第三アンテナ133で観測角θi3の観測信号を受信し(時刻T3)、第二アンテナ132で観測角θi2の観測信号を受信し(時刻T2)、第一アンテナ131で観測角θi1の観測信号を受信する(時刻T1)。なお、制御装置110は、このような受信を達成できるよう送信信号の送信タイミングをアンテナ毎に算出し、算出したタイミングで個々のアンテナから信号を送信する。なお、多観測角観測装置100がパッシブ観測装置である場合は、受信タイミングは任意である(同時でも同時でなくても構わない)。
【0044】
図7は、実施の形態1において多観測角観測装置100により得られる観測データの一例を示す図である。これは、アクティブ/パッシブに関わらない。
多観測角観測装置100により得られる観測データについて、図7に基づいて以下に説明する。
【0045】
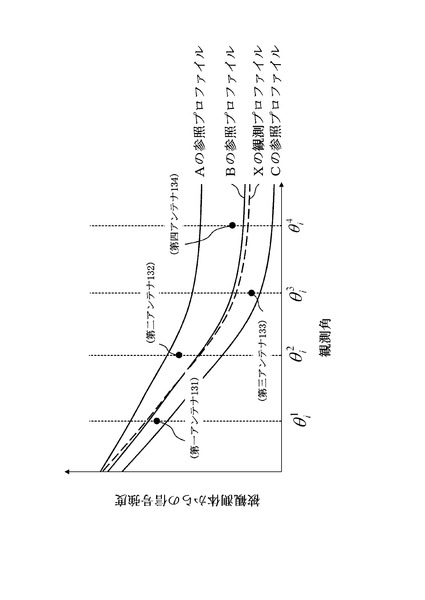
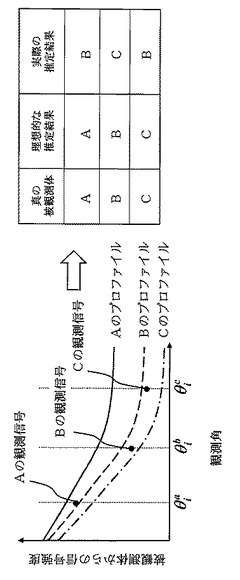
多観測角観測装置100は、第一アンテナ131〜第四アンテナ134を用いて被観測体xから4つの観測信号(観測角θi1〜θi4)を受信する。
制御装置110は、4つの観測信号それぞれの観測角と信号強度とに基づいて被観測体xの観測プロファイルを生成する。
被観測体xの観測プロファイルとは、4つの観測信号に対してより近似する信号強度を示すグラフデータである。
【0046】
例えば、制御装置110は、4つの観測信号それぞれを観測角と信号強度とに対応付けてプロットし、4つのプロット点それぞれとの差が最小になる曲線を算出する。算出された曲線が被観測対象xの観測プロファイルである。
【0047】
制御装置110は、被観測体xの観測プロファイルと実験結果または理論値から得られた被観測体A〜Cの参照プロファイルとを比較し、比較結果に基づいて被観測体xの種類(材質、形状など)を推定する。
図7では、被観測体xの観測プロファイルが被観測体Bの参照プロファイルに近似しているため、被観測体xの材質や形状が被観測体Bに類似していると推定される。
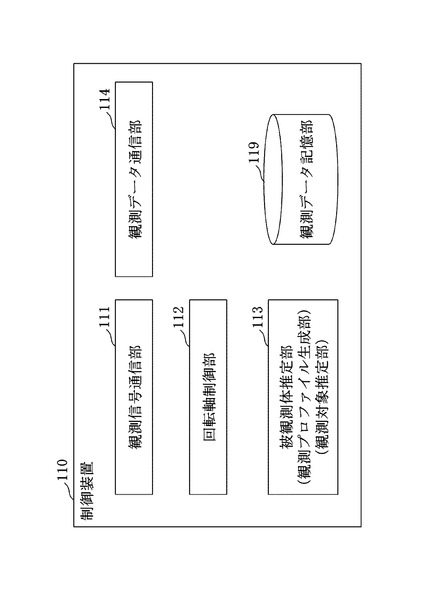
【0048】
図8は、実施の形態1における制御装置110の機能構成図である。
実施の形態1における制御装置110の機能構成について、図8に基づいて以下に説明する。
【0049】
制御装置110(観測対象推定装置の一例)は、観測信号通信部111、回転軸制御部112、被観測体推定部113(観測プロファイル生成部、観測対象推定部の一例)、観測データ通信部114および観測データ記憶部119を備える。
【0050】
観測データ記憶部119は制御装置110が使用するデータを記憶する。
観測データ記憶部119には、第一アンテナ131〜第四アンテナ134それぞれの観測角を予め記憶する。
観測データ記憶部119には、参照プロファイルを被観測体の種類(材質、形状など)毎に予め記憶する。
【0051】
観測信号通信部111は観測信号の通信を行う。
アクティブ方式の場合、観測信号通信部111は所定の波形を有する電磁波を観測信号として生成し、生成した観測信号をアンテナ群130から発信する。そして、観測信号通信部111は、被観測体で反射して後方散乱した観測信号をアンテナ群130で受信し、受信した観測信号の波形情報(信号強度、位相など)をアンテナの観測角や観測時刻に対応付けて観測データ記憶部119に記憶する。
パッシブ方式の場合、観測信号通信部111は被観測体から放射される電磁波をアンテナ群130で観測信号として受信する。観測信号通信部111は受信した観測信号の波形情報をアンテナの観測角や観測時刻に対応づけて観測データ記憶部119に記憶する。
【0052】
回転軸制御部112は第一アンテナ131〜第四アンテナ134それぞれの観測角(または取り付け角度、指向方向)に基づいて第一回転軸121〜第四回転軸124それぞれの角速度を算出し、算出した角速度で第一回転軸121〜第四回転軸124を回転させる。
【0053】
被観測体推定部113は、第一アンテナ131〜第四アンテナ134で得られた観測信号の波形情報に基づいて被観測体の観測プロファイルを算出する(観測プロファイル算出処理)。
被観測体推定部113は、観測プロファイルを各種の参照プロファイルと比較して被観測体の種類を推定する(被観測体推定処理)(図7参照)。
被観測体推定部113は、被観測体の推定結果を観測データ記憶部119に記憶する。
観測プロファイル算出処理と被観測体推定処理とは被観測体推定方法(観測対象推定方法の一例)を構成する。
【0054】
観測データ通信部114は、観測データ記憶部119に記憶された観測信号の波形情報や被観測体の推定結果をアンテナ群130または別に備えられたアンテナを用いて地上の観測センター装置へ送信する。
【0055】
被観測体の推定は、多観測角観測装置100で行わずに観測センター装置で行っても構わない。
【0056】
制御装置110は、CPU(Central・Processing・Unit)を備えている。
CPUは、バスを介してROM、RAM、通信ボード、電源装置、バッテリー、モーターなどと接続され、これらのハードウェアデバイスを制御する。
ROMまたはRAMには、OS(オペレーティングシステム)、プログラム群、ファイル群が記憶されている。
プログラム群には、実施の形態において「〜部」として説明する機能を実行するプログラムが含まれる。プログラムは、CPUにより読み出され実行される。すなわち、プログラムは、「〜部」としてコンピュータを機能させるものであり、また「〜部」の手順や方法をコンピュータに実行させるものである。
ファイル群には、実施の形態において説明する「〜部」で使用される各種データ(入力、出力、判定結果、計算結果、処理結果など)が含まれる。
【0057】
実施の形態において「〜部」として説明するものは「〜回路」、「〜装置」、「〜機器」であってもよく、また「〜ステップ」、「〜手順」、「〜処理」であってもよい。すなわち、「〜部」として説明するものは、ファームウェア、ソフトウェア、ハードウェアまたはこれらの組み合わせのいずれで実装されても構わない。
【0058】
実施の形態1において、観測角が異なる複数のアンテナを備えたコニカルスキャン方式の観測装置について説明した。
観測角が異なる複数のアンテナを備えることにより、観測角が異なる複数の観測信号を取得することができる。
観測角が異なる複数の観測信号に基づいて被観測体を推定することにより、被観測体の推定精度を高めることができる(図7参照)。
【0059】
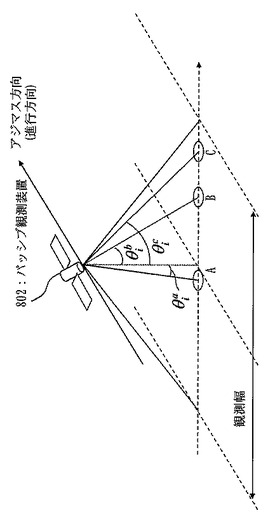
図9は、従来のプッシュブルーム方式のパッシブ観測装置802を用いた観測方法を示す図である。
図10は、従来のプッシュブルーム方式のパッシブ観測装置802によって得られる観測データの一例を示す図である。
【0060】
図9に示すように、プッシュブルーム方式の従来のパッシブ観測装置802(例えば、光学カメラ)は、アンテナの向きを変えることにより観測幅を広げることができる。
観測信号の観測角は観測点によって異なるが、一つの観測点からは一つの観測角でしか観測信号を得ることができない。
例えば、被観測体Aからは観測角θiaの観測信号しか得ることができず、被観測体Bからは観測角θibの観測信号しか得ることができず、被観測体Cからは観測角θicの観測信号しか得ることができない。
【0061】
図10に示すように、各観測信号を観測角と信号強度とに基づいてプロットした場合、観測信号には誤差が含まれるため、参照プロファイルと一致しない。
例えば、被観測体Aの観測信号は被観測体Aの参照プロファイルよりも被観測体Bの参照プロファイルの近くにプロットされ、被観測体Aは被観測体Bとして推定されてしまう。
【0062】
一方、実施の形態1で説明した多観測角観測装置100は、複数の観測角で観測信号を得ることにより、被観測体の推定精度を高めることができる(図7参照)。
【0063】
多観測角観測装置100の制御装置110は、第一アンテナ131〜第四アンテナ134それぞれの傾きの大きさまたは指向性を変えるアンテナ制御部を備えてもよい。
これにより、第一アンテナ131〜第四アンテナ134それぞれの観測角を変化させることができる。
例えば、アンテナ制御部は、特定の地域または時間帯では第一アンテナ131〜第四アンテナ134の観測角を「0度〜90度」にし、別の地域または時間帯では第一アンテナ131〜第四アンテナ134の観測角を「20度〜40度」にする。
【0064】
これにより、興味のある角度範囲にリソースを集中させ、高精度な推定を行うことができる。
例えば、地表や海面の温度、地表や海面の粗さ、植生(例えば、農作物)の種類や生育や伐採状況、植生や地面の水含有量などを高い精度で推定することができる。
地表や海面の温度を推定できれば核施設や工場排水を特定でき、植生や地面の水含有量を推定できれば地滑りの可能性や通行規制を判断できる。
【0065】
制御装置110の回転軸制御部112が第一回転軸121〜第四回転軸124それぞれの角速度を制御することにより、観測信号の伝播時間の時間差をアンテナ毎に調節することができる。
さらに、船舶や車両などの移動体(被観測体、観測対象の一例)の移動速度を推定する技術にも有用である。
【0066】
多観測角観測装置100が備えるアンテナ数は4つでなく、2つ、3つまたは5つ以上であっても構わない。
【0067】
多観測角観測装置100はその他の種類の観測装置(例えば、合成開口レーダ)であっても構わない。
【符号の説明】
【0068】
100 多観測角観測装置、110 制御装置、111 観測信号通信部、112 回転軸制御部、113 被観測体推定部、114 観測データ通信部、119 観測データ記憶部、120 アンテナ回転軸、121 第一回転軸、121A 支持棒、122 第二回転軸、122A 支持棒、123 第三回転軸、123A 支持棒、124 第四回転軸、124A 支持棒、130 アンテナ群、131 第一アンテナ、132 第二アンテナ、133 第三アンテナ、134 第四アンテナ、140 太陽電池パネル、801 観測装置、802 パッシブ観測装置、810 制御装置、820 アンテナ回転軸、830 アンテナ、840 太陽電池パネル。
【技術分野】
【0001】
本発明は、上空から移動を伴って地上の観測対象をアクティブ/パッシブ方式にかかわらず観測する観測装置、例えば、航空機や人工衛星搭載型のカメラやレーダ、観測対象を推定する観測対象推定装置に関するものである。
【背景技術】
【0002】
従来、航空機や人工衛星等の移動体をプラットフォームとする観測装置は、観測対象エリアの任意の地点について1つの観測角でしか観測できなかった。なお、観測角とは、移動体から地面への垂線と、移動体と観測対象エリア中の一点を結ぶ線からなる角度である。
また、被観測体を観測して得られる観測信号は、システムの熱雑音、移動体自身の姿勢や軌道の変動、及び観測エリアの地形などの影響を受けて実際の値と異なる信号強度を示してしまう。
【0003】
観測信号の信号強度は、対象の材質や形状のみならず、観測角に強く依存することが知られている。
このため、特定の観測角で観測された1つの観測信号に基づいて被観測体の材質や形状等の物理情報を特定することは困難である。
【0004】
従来、移動体をプラットフォームとするコニカルスキャン方式と呼ばれる観測装置が知られている。
コニカルスキャン方式の観測装置はアンテナ回転軸を回転させることにより観測地点をアンテナで走査して観測を行う。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2006−270806号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明は、例えば、合成開口レーダによる被観測体の推定精度を向上させることを目的とする。
【課題を解決するための手段】
【0007】
本発明の観測装置は、
観測対象に対して互いに異なる方向から送信信号を送信し、観測対象から観測信号を互いに異なる方向から受信する複数のアンテナと、
軸方向に長さを有し、複数のアンテナを長さ方向の異なる位置に取り付け、長さ方向を軸にして回転するアンテナ回転軸と、
複数のアンテナそれぞれの送信信号を生成し、複数のアンテナが取り付けられた前記アンテナ回転軸を回転させ、複数のアンテナによって異なる方向から送信信号を送信し、複数のアンテナによって異なる方向から観測信号を受信し、複数のアンテナによって受信した複数の観測信号を記憶する制御装置とを備える。ここで、複数のアンテナは、送信/受信機能を兼ねる。ただし、例えば、カメラや放射計のようなパッシブ方式の観測システムを実現したい場合は、送信信号生成部は除外され、複数アンテナの送信機能も除外される。
【0008】
前記アンテナ回転軸は、アンテナを取り付けるアンテナ取付部をアンテナ毎に有し、アンテナ取付部毎に回転し、
前記制御装置は、前記アンテナ回転軸をアンテナ取付部毎に異なる速さで回転させる。
【0009】
前記制御装置は、各アンテナ取付部をアンテナ取付部に取り付けられたアンテナが観測信号を受信する方向が下向きであるほど早く回転させる。これは、複数の送受信アンテナの互いの方向が異なり、移動体からそれぞれのアンテナに対する観測地点への距離が異なることによる。
【0010】
複数のアンテナは上に位置するものほどアンテナ取付部からの距離が遠く、
複数のアンテナは下に位置するものほど観測信号の受信方向が下向きである。
【0011】
前記制御装置は複数のアンテナそれぞれに対して送信信号の送信方向と、観測信号の受信方向を変化させる。
【0012】
前記制御装置は、観測信号の受信方向と観測信号の信号強度との関係を表すプロファイルデータを参照プロファイルとして地物の種類毎に記憶し、複数のアンテナで受信した複数の観測信号に基づいてプロファイルデータを観測プロファイルとして生成し、生成した観測プロファイルを参照プロファイルと比較して前記観測対象の種類を特定する。
【0013】
本発明の観測装置は、
観測角が異なる複数のアンテナを備え、複数のアンテナを用いてコニカルスキャン方式で観測対象を観測する。
【0014】
本発明の観測対象推定装置は、
観測信号の観測角と観測信号の信号強度との関係を表すプロファイルデータを参照プロファイルとして地物の種類毎に記憶し、観測対象を観測して得られた複数の観測信号情報であって観測角が異なる複数の観測信号を表す複数の観測信号情報を記憶する観測データ記憶部と、
前記観測データ記憶部に記憶された複数の観測信号情報に基づいてプロファイルデータを観測プロファイルとして生成する観測プロファイル生成部と、
前記観測プロファイル生成部により生成された観測プロファイルを参照プロファイルと比較して前記観測対象の種類を推定する観測対象推定部とを備える。
【発明の効果】
【0015】
本発明によれば、例えば、複数のアンテナを用いて異なる観測角で複数の観測信号を受信することができる。
観測角が異なる複数の観測信号を得られることにより、被観測体(観測対象)の推定精度を向上させることができる。
【図面の簡単な説明】
【0016】
【図1】実施の形態1における多観測角観測装置100の外観図。
【図2】従来のコニカルスキャン方式の観測装置801の外観図。
【図3】従来のコニカルスキャン方式の観測装置801を用いた観測方法を示す図。
【図4】従来のコニカルスキャン方式の観測装置801によって得られる観測データの一例を示す図。
【図5】実施の形態1における多観測角観測装置100の観測方法を示す図。
【図6】実施の形態1における多観測角観測装置100の観測方法を示す図。
【図7】実施の形態1において多観測角観測装置100により得られる観測データの一例を示す図。
【図8】実施の形態1における制御装置110の機能構成図。
【図9】従来のプッシュブルーム方式のパッシブ観測装置802を用いた観測方法を示す図。
【図10】従来のプッシュブルーム方式のパッシブ観測装置802によって得られる観測データの一例を示す図。
【発明を実施するための形態】
【0017】
実施の形態1.
上空から移動を伴って地上の観測対象を観測する観測装置について説明する。
【0018】
図1は、実施の形態1における多観測角観測装置100の外観図である。
実施の形態1における多観測角観測装置100(観測装置の一例)の構成について、図1に基づいて以下に説明する。
【0019】
多観測角観測装置100は、観測角が異なる複数のアンテナ(アンテナ群130)を備えたコニカルスキャン方式の観測装置である。
【0020】
ここで、従来のコニカルスキャン方式の観測装置について図2〜図4に基づいて説明する。
【0021】
図2は、従来のコニカルスキャン方式の観測装置801の外観図である。
図3は、従来のコニカルスキャン方式の観測装置801を用いた観測方法を示す図である。
図4は、従来のコニカルスキャン方式の観測装置801によって得られる観測データの一例を示す図である。
【0022】
図2において、従来のコニカルスキャン方式の観測装置801は、制御装置810、アンテナ回転軸820、アンテナ830および太陽電池パネル840を備える。
【0023】
図3において、従来の観測装置801は航空機、人工衛星その他の移動体(飛行体)に搭載され、上空を飛行する。
従来の観測装置801の進行方向を「アジマス方向」という。
【0024】
従来の観測装置801の制御装置810はアンテナ回転軸820を回転させる。
アンテナ回転軸820には一つのアンテナ830が斜め下向きに取り付けられ、アンテナ830は斜め下方から電磁波を送受信し、制御装置810はアンテナ830が受信した電磁波の情報を記憶する。
以下、アンテナ830が受信する電磁波を「観測信号」という。
【0025】
アンテナが観測信号を受信する受信方向を「観測角θi」という。観測角θiは観測信号の進行方向と垂直方向とが成す角度を示す。観測角θiは入射角またはオフナディア角(入射角≒オフナディア角)とも呼ばれる。
アンテナ回転軸820を回転させることにより観測信号を観測できる領域の幅を「観測幅」という。
【0026】
アンテナ830の取り付け角度(またはアンテナの指向性)が変わらなければ、観測信号の観測角θiは一定である。
つまり、従来の観測装置801は観測角θiでしか観測信号を得られない。
【0027】
例えば、観測信号の信号強度と観測角との関係を表すグラフを作成した場合、被観測体xの観測信号は観測角θi上にプロットされる(図4参照)。
【0028】
図4において、被観測体xの参照プロファイルは、被観測体xの観測信号の信号強度を観測角毎に実験的または理論的に求めたグラフデータ(関数データ)である。
観測信号の信号強度は、観測信号の観測角および被観測体(観測対象)の材質、形状や状態によって異なる。
参照プロファイルは、被観測体の材質、形状や状態によって異なる。
【0029】
合成開口レーダ801による観測は熱雑音(ノイズ)、姿勢変動、軌道変動などの影響を受けるため、従来の観測装置801により得られる観測信号は誤差を含み、参照プロファイルと異なる信号強度を示す。
【0030】
図1に戻り、実施の形態1における多観測角観測装置100の説明を続ける。
【0031】
多観測角観測装置100(観測装置の一例)は、制御装置110、アンテナ回転軸120、アンテナ群130および太陽電池パネル140を備える。
【0032】
アンテナ回転軸120は、軸方向(長さ方向、上下方向)で4つに分割されている。
以下、アンテナ回転軸120の分割部分を下から順に第一回転軸121、第二回転軸122、第三回転軸123および第四回転軸124という。
【0033】
第一回転軸121〜第四回転軸124(アンテナ取付部の一例)は別々に回転する。
第一回転軸121〜第四回転軸124はそれぞれに支持棒121A〜124Aを有する。
【0034】
支持棒121A〜支持棒124Aは互いに異なる長さlを有し、下に位置する支持棒ほど短く、上に位置する支持棒ほど長い。
支持棒121A〜支持棒124Aの先端にはアンテナ群130のアンテナが取り付けられている。
以下、支持棒121A〜支持棒124Aに取り付けられているアンテナを支持棒の順に、第一アンテナ131、第二アンテナ132、第三アンテナ133および第四アンテナ134という。
【0035】
第一アンテナ131〜第四アンテナ134は互いに異なる角度で取り付けられ、互いに異なる観測角θiを有する。但し、第一アンテナ131〜第四アンテナ134は互いに異なる指向性を持つことにより、互いに異なる観測角θiを有しても構わない。
第一アンテナ131〜第四アンテナ134は下に位置するアンテナほど下向きであり、上に位置するアンテナほど上向き(横向き)である。下向き、上向きとはアンテナの取り付け角度または指向方向を意味している。
第一アンテナ131〜第四アンテナ134は下に位置するアンテナほど観測角θiが小さく、上に位置するアンテナほど観測角θiが大きい。
【0036】
太陽電池パネル140は、太陽光を受けて発電し、得られた電力を制御装置110に供給する。
【0037】
制御装置110は、第一回転軸121〜第四回転軸124をそれぞれに異なる角速度(回転速度)で回転させる。
【0038】
第一アンテナ131〜第四アンテナ134は下向きであるほど観測地点との距離が短く、上向き(横向き)であるほど観測点との距離が長い。そのため、観測信号を発信して観測点で反射した観測信号を受信するアクティブ方式の観測において、観測信号を発信してから受信するまでに要する観測信号の伝播時間はアンテナ毎に異なる。
そこで、制御装置110は、第一アンテナ131〜第四アンテナ134それぞれの観測角θi(または取り付け角、指向方向)に基づいて観測点との距離を算出し、観測点との距離に基づいて観測信号の伝播時間を算出し、観測信号の伝播時間に基づいて第一回転軸121〜第四回転軸124それぞれの角速度を算出する。
制御装置110により算出される角速度は、第一アンテナ131〜第四アンテナ134それぞれが観測点で反射した観測信号を受信できる程度の速さである。
【0039】
制御装置110は、各回転軸の回転速度を独立に制御できるが、通常、下に位置する回転軸ほど速く回転させ、上に位置する回転軸ほど遅く回転させる。
つまり、制御装置110は、通常、第一アンテナ131〜第四アンテナ134をアンテナ回転軸120に対して下向きのアンテナほど速く回転させ、上向き(横向き)のアンテナほど遅く回転させる。
【0040】
図5、図6は、実施の形態1における多観測角観測装置100の観測方法を示す図である。
実施の形態1における多観測角観測装置100の観測方法について、図5および図6に基づいて以下に説明する。
【0041】
図5に示すように、多観測角観測装置100は、第一アンテナ131〜第四アンテナ134を用いて4つの観測角θi1〜θi4で信号を送信、および観測信号を受信する。
これにより、多観測角観測装置100は、第一アンテナ131(観測角θi1)の観測幅の領域内であれば、どの観測点からでも4つの観測角θi1〜θi4で信号を送信、および観測信号を受信することができる。
【0042】
例えば、多観測角観測装置100は、第一アンテナ131の観測幅の領域内に位置する被観測体xに対し、以下のように信号を送信、および観測信号を受信する。
【0043】
図6において、多観測角観測装置100は、第四アンテナ134で観測角θi4の観測信号を受信し(時刻T4)、第三アンテナ133で観測角θi3の観測信号を受信し(時刻T3)、第二アンテナ132で観測角θi2の観測信号を受信し(時刻T2)、第一アンテナ131で観測角θi1の観測信号を受信する(時刻T1)。なお、制御装置110は、このような受信を達成できるよう送信信号の送信タイミングをアンテナ毎に算出し、算出したタイミングで個々のアンテナから信号を送信する。なお、多観測角観測装置100がパッシブ観測装置である場合は、受信タイミングは任意である(同時でも同時でなくても構わない)。
【0044】
図7は、実施の形態1において多観測角観測装置100により得られる観測データの一例を示す図である。これは、アクティブ/パッシブに関わらない。
多観測角観測装置100により得られる観測データについて、図7に基づいて以下に説明する。
【0045】
多観測角観測装置100は、第一アンテナ131〜第四アンテナ134を用いて被観測体xから4つの観測信号(観測角θi1〜θi4)を受信する。
制御装置110は、4つの観測信号それぞれの観測角と信号強度とに基づいて被観測体xの観測プロファイルを生成する。
被観測体xの観測プロファイルとは、4つの観測信号に対してより近似する信号強度を示すグラフデータである。
【0046】
例えば、制御装置110は、4つの観測信号それぞれを観測角と信号強度とに対応付けてプロットし、4つのプロット点それぞれとの差が最小になる曲線を算出する。算出された曲線が被観測対象xの観測プロファイルである。
【0047】
制御装置110は、被観測体xの観測プロファイルと実験結果または理論値から得られた被観測体A〜Cの参照プロファイルとを比較し、比較結果に基づいて被観測体xの種類(材質、形状など)を推定する。
図7では、被観測体xの観測プロファイルが被観測体Bの参照プロファイルに近似しているため、被観測体xの材質や形状が被観測体Bに類似していると推定される。
【0048】
図8は、実施の形態1における制御装置110の機能構成図である。
実施の形態1における制御装置110の機能構成について、図8に基づいて以下に説明する。
【0049】
制御装置110(観測対象推定装置の一例)は、観測信号通信部111、回転軸制御部112、被観測体推定部113(観測プロファイル生成部、観測対象推定部の一例)、観測データ通信部114および観測データ記憶部119を備える。
【0050】
観測データ記憶部119は制御装置110が使用するデータを記憶する。
観測データ記憶部119には、第一アンテナ131〜第四アンテナ134それぞれの観測角を予め記憶する。
観測データ記憶部119には、参照プロファイルを被観測体の種類(材質、形状など)毎に予め記憶する。
【0051】
観測信号通信部111は観測信号の通信を行う。
アクティブ方式の場合、観測信号通信部111は所定の波形を有する電磁波を観測信号として生成し、生成した観測信号をアンテナ群130から発信する。そして、観測信号通信部111は、被観測体で反射して後方散乱した観測信号をアンテナ群130で受信し、受信した観測信号の波形情報(信号強度、位相など)をアンテナの観測角や観測時刻に対応付けて観測データ記憶部119に記憶する。
パッシブ方式の場合、観測信号通信部111は被観測体から放射される電磁波をアンテナ群130で観測信号として受信する。観測信号通信部111は受信した観測信号の波形情報をアンテナの観測角や観測時刻に対応づけて観測データ記憶部119に記憶する。
【0052】
回転軸制御部112は第一アンテナ131〜第四アンテナ134それぞれの観測角(または取り付け角度、指向方向)に基づいて第一回転軸121〜第四回転軸124それぞれの角速度を算出し、算出した角速度で第一回転軸121〜第四回転軸124を回転させる。
【0053】
被観測体推定部113は、第一アンテナ131〜第四アンテナ134で得られた観測信号の波形情報に基づいて被観測体の観測プロファイルを算出する(観測プロファイル算出処理)。
被観測体推定部113は、観測プロファイルを各種の参照プロファイルと比較して被観測体の種類を推定する(被観測体推定処理)(図7参照)。
被観測体推定部113は、被観測体の推定結果を観測データ記憶部119に記憶する。
観測プロファイル算出処理と被観測体推定処理とは被観測体推定方法(観測対象推定方法の一例)を構成する。
【0054】
観測データ通信部114は、観測データ記憶部119に記憶された観測信号の波形情報や被観測体の推定結果をアンテナ群130または別に備えられたアンテナを用いて地上の観測センター装置へ送信する。
【0055】
被観測体の推定は、多観測角観測装置100で行わずに観測センター装置で行っても構わない。
【0056】
制御装置110は、CPU(Central・Processing・Unit)を備えている。
CPUは、バスを介してROM、RAM、通信ボード、電源装置、バッテリー、モーターなどと接続され、これらのハードウェアデバイスを制御する。
ROMまたはRAMには、OS(オペレーティングシステム)、プログラム群、ファイル群が記憶されている。
プログラム群には、実施の形態において「〜部」として説明する機能を実行するプログラムが含まれる。プログラムは、CPUにより読み出され実行される。すなわち、プログラムは、「〜部」としてコンピュータを機能させるものであり、また「〜部」の手順や方法をコンピュータに実行させるものである。
ファイル群には、実施の形態において説明する「〜部」で使用される各種データ(入力、出力、判定結果、計算結果、処理結果など)が含まれる。
【0057】
実施の形態において「〜部」として説明するものは「〜回路」、「〜装置」、「〜機器」であってもよく、また「〜ステップ」、「〜手順」、「〜処理」であってもよい。すなわち、「〜部」として説明するものは、ファームウェア、ソフトウェア、ハードウェアまたはこれらの組み合わせのいずれで実装されても構わない。
【0058】
実施の形態1において、観測角が異なる複数のアンテナを備えたコニカルスキャン方式の観測装置について説明した。
観測角が異なる複数のアンテナを備えることにより、観測角が異なる複数の観測信号を取得することができる。
観測角が異なる複数の観測信号に基づいて被観測体を推定することにより、被観測体の推定精度を高めることができる(図7参照)。
【0059】
図9は、従来のプッシュブルーム方式のパッシブ観測装置802を用いた観測方法を示す図である。
図10は、従来のプッシュブルーム方式のパッシブ観測装置802によって得られる観測データの一例を示す図である。
【0060】
図9に示すように、プッシュブルーム方式の従来のパッシブ観測装置802(例えば、光学カメラ)は、アンテナの向きを変えることにより観測幅を広げることができる。
観測信号の観測角は観測点によって異なるが、一つの観測点からは一つの観測角でしか観測信号を得ることができない。
例えば、被観測体Aからは観測角θiaの観測信号しか得ることができず、被観測体Bからは観測角θibの観測信号しか得ることができず、被観測体Cからは観測角θicの観測信号しか得ることができない。
【0061】
図10に示すように、各観測信号を観測角と信号強度とに基づいてプロットした場合、観測信号には誤差が含まれるため、参照プロファイルと一致しない。
例えば、被観測体Aの観測信号は被観測体Aの参照プロファイルよりも被観測体Bの参照プロファイルの近くにプロットされ、被観測体Aは被観測体Bとして推定されてしまう。
【0062】
一方、実施の形態1で説明した多観測角観測装置100は、複数の観測角で観測信号を得ることにより、被観測体の推定精度を高めることができる(図7参照)。
【0063】
多観測角観測装置100の制御装置110は、第一アンテナ131〜第四アンテナ134それぞれの傾きの大きさまたは指向性を変えるアンテナ制御部を備えてもよい。
これにより、第一アンテナ131〜第四アンテナ134それぞれの観測角を変化させることができる。
例えば、アンテナ制御部は、特定の地域または時間帯では第一アンテナ131〜第四アンテナ134の観測角を「0度〜90度」にし、別の地域または時間帯では第一アンテナ131〜第四アンテナ134の観測角を「20度〜40度」にする。
【0064】
これにより、興味のある角度範囲にリソースを集中させ、高精度な推定を行うことができる。
例えば、地表や海面の温度、地表や海面の粗さ、植生(例えば、農作物)の種類や生育や伐採状況、植生や地面の水含有量などを高い精度で推定することができる。
地表や海面の温度を推定できれば核施設や工場排水を特定でき、植生や地面の水含有量を推定できれば地滑りの可能性や通行規制を判断できる。
【0065】
制御装置110の回転軸制御部112が第一回転軸121〜第四回転軸124それぞれの角速度を制御することにより、観測信号の伝播時間の時間差をアンテナ毎に調節することができる。
さらに、船舶や車両などの移動体(被観測体、観測対象の一例)の移動速度を推定する技術にも有用である。
【0066】
多観測角観測装置100が備えるアンテナ数は4つでなく、2つ、3つまたは5つ以上であっても構わない。
【0067】
多観測角観測装置100はその他の種類の観測装置(例えば、合成開口レーダ)であっても構わない。
【符号の説明】
【0068】
100 多観測角観測装置、110 制御装置、111 観測信号通信部、112 回転軸制御部、113 被観測体推定部、114 観測データ通信部、119 観測データ記憶部、120 アンテナ回転軸、121 第一回転軸、121A 支持棒、122 第二回転軸、122A 支持棒、123 第三回転軸、123A 支持棒、124 第四回転軸、124A 支持棒、130 アンテナ群、131 第一アンテナ、132 第二アンテナ、133 第三アンテナ、134 第四アンテナ、140 太陽電池パネル、801 観測装置、802 パッシブ観測装置、810 制御装置、820 アンテナ回転軸、830 アンテナ、840 太陽電池パネル。
【特許請求の範囲】
【請求項1】
観測対象に対して互いに異なる方向から送信信号を送信し、観測対象から観測信号を互いに異なる方向から受信する複数のアンテナと、
軸方向に長さを有し、複数のアンテナを長さ方向の異なる位置に取り付け、長さ方向を軸にして回転するアンテナ回転軸と、
複数のアンテナそれぞれの送信信号を生成し、複数のアンテナが取り付けられた前記アンテナ回転軸を回転させ、複数のアンテナによって異なる方向から送信信号を送信し、複数のアンテナによって異なる方向から観測信号を受信し、複数のアンテナによって受信した複数の観測信号を記憶する制御装置と
を備えたことを特徴とする観測装置。
【請求項2】
前記アンテナ回転軸は、アンテナを取り付けるアンテナ取付部をアンテナ毎に有し、アンテナ取付部毎に回転し、
前記制御装置は、前記アンテナ回転軸をアンテナ取付部毎に異なる速さで回転させる
ことを特徴とする請求項1記載の観測装置。
【請求項3】
前記制御装置は、各アンテナ取付部をアンテナ取付部に取り付けられたアンテナが観測信号を受信する方向が下向きであるほど早く回転させる
ことを特徴とする請求項2記載の観測装置。
【請求項4】
複数のアンテナは上に位置するものほどアンテナ取付部からの距離が遠く、
複数のアンテナは下に位置するものほど観測信号の受信方向が下向きである
ことを特徴とする請求項3記載の観測装置。
【請求項5】
前記制御装置は複数のアンテナそれぞれに対して送信信号の送信方向と、観測信号の受信方向を変化させることを特徴とする請求項1〜請求項4いずれかに記載の観測装置。
【請求項6】
前記制御装置は、観測信号の受信方向と観測信号の信号強度との関係を表すプロファイルデータを参照プロファイルとして地物の種類毎に記憶し、複数のアンテナで受信した複数の観測信号に基づいてプロファイルデータを観測プロファイルとして生成し、生成した観測プロファイルを参照プロファイルと比較して前記観測対象の種類を特定する
ことを特徴とする請求項1〜請求項5いずれかに記載の観測装置。
【請求項7】
観測角が異なる複数のアンテナを備え、複数のアンテナを用いてコニカルスキャン方式で観測対象を観測することを特徴とする観測装置。
【請求項8】
観測信号の観測角と観測信号の信号強度との関係を表すプロファイルデータを参照プロファイルとして地物の種類毎に記憶し、観測対象を観測して得られた複数の観測信号情報であって観測角が異なる複数の観測信号を表す複数の観測信号情報を記憶する観測データ記憶部と、
前記観測データ記憶部に記憶された複数の観測信号情報に基づいてプロファイルデータを観測プロファイルとして生成する観測プロファイル生成部と、
前記観測プロファイル生成部により生成された観測プロファイルを参照プロファイルと比較して前記観測対象の種類を推定する観測対象推定部と
を備えたことを特徴とする観測対象推定装置。
【請求項1】
観測対象に対して互いに異なる方向から送信信号を送信し、観測対象から観測信号を互いに異なる方向から受信する複数のアンテナと、
軸方向に長さを有し、複数のアンテナを長さ方向の異なる位置に取り付け、長さ方向を軸にして回転するアンテナ回転軸と、
複数のアンテナそれぞれの送信信号を生成し、複数のアンテナが取り付けられた前記アンテナ回転軸を回転させ、複数のアンテナによって異なる方向から送信信号を送信し、複数のアンテナによって異なる方向から観測信号を受信し、複数のアンテナによって受信した複数の観測信号を記憶する制御装置と
を備えたことを特徴とする観測装置。
【請求項2】
前記アンテナ回転軸は、アンテナを取り付けるアンテナ取付部をアンテナ毎に有し、アンテナ取付部毎に回転し、
前記制御装置は、前記アンテナ回転軸をアンテナ取付部毎に異なる速さで回転させる
ことを特徴とする請求項1記載の観測装置。
【請求項3】
前記制御装置は、各アンテナ取付部をアンテナ取付部に取り付けられたアンテナが観測信号を受信する方向が下向きであるほど早く回転させる
ことを特徴とする請求項2記載の観測装置。
【請求項4】
複数のアンテナは上に位置するものほどアンテナ取付部からの距離が遠く、
複数のアンテナは下に位置するものほど観測信号の受信方向が下向きである
ことを特徴とする請求項3記載の観測装置。
【請求項5】
前記制御装置は複数のアンテナそれぞれに対して送信信号の送信方向と、観測信号の受信方向を変化させることを特徴とする請求項1〜請求項4いずれかに記載の観測装置。
【請求項6】
前記制御装置は、観測信号の受信方向と観測信号の信号強度との関係を表すプロファイルデータを参照プロファイルとして地物の種類毎に記憶し、複数のアンテナで受信した複数の観測信号に基づいてプロファイルデータを観測プロファイルとして生成し、生成した観測プロファイルを参照プロファイルと比較して前記観測対象の種類を特定する
ことを特徴とする請求項1〜請求項5いずれかに記載の観測装置。
【請求項7】
観測角が異なる複数のアンテナを備え、複数のアンテナを用いてコニカルスキャン方式で観測対象を観測することを特徴とする観測装置。
【請求項8】
観測信号の観測角と観測信号の信号強度との関係を表すプロファイルデータを参照プロファイルとして地物の種類毎に記憶し、観測対象を観測して得られた複数の観測信号情報であって観測角が異なる複数の観測信号を表す複数の観測信号情報を記憶する観測データ記憶部と、
前記観測データ記憶部に記憶された複数の観測信号情報に基づいてプロファイルデータを観測プロファイルとして生成する観測プロファイル生成部と、
前記観測プロファイル生成部により生成された観測プロファイルを参照プロファイルと比較して前記観測対象の種類を推定する観測対象推定部と
を備えたことを特徴とする観測対象推定装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2011−209048(P2011−209048A)
【公開日】平成23年10月20日(2011.10.20)
【国際特許分類】
【出願番号】特願2010−75986(P2010−75986)
【出願日】平成22年3月29日(2010.3.29)
【出願人】(591102095)三菱スペース・ソフトウエア株式会社 (148)
【Fターム(参考)】
【公開日】平成23年10月20日(2011.10.20)
【国際特許分類】
【出願日】平成22年3月29日(2010.3.29)
【出願人】(591102095)三菱スペース・ソフトウエア株式会社 (148)
【Fターム(参考)】
[ Back to top ]