
観者の視点移動に対応した立体オブジェクトの擬似3次元画像を表示する方法及び装置
【課題】観者の視点移動に対応した立体オブジェクトの擬似3次元的画像を表示する方法等を提供する。
【解決手段】(a)同一の光学特性を有し、被写体となる観者の存在すべき基準位置へ向けられた同一の光軸上に、観者から異なった距離に配置された第1カメラ(A)と第2カメラ(B)により、観者の頭部を同時に自動撮影するステップと、(b)両カメラにより撮影した画像の画像サイズを同一化するステップと、(c)同一サイズ化された両画像を重ね合わせ、両画像間のズレδを検知するステップと、(d)上記ズレδに基づき、観者の視点位置の移動量を例えば角度として算出し、当該移動量に基づき上記撮影時の観者の視点位置を求めるステップと、(e)求められた観者の視点位置から見た3Dポリゴン画像の擬似3次元的な2次元画像データを作成するステップと、を順次実行することを特徴とする。
【解決手段】(a)同一の光学特性を有し、被写体となる観者の存在すべき基準位置へ向けられた同一の光軸上に、観者から異なった距離に配置された第1カメラ(A)と第2カメラ(B)により、観者の頭部を同時に自動撮影するステップと、(b)両カメラにより撮影した画像の画像サイズを同一化するステップと、(c)同一サイズ化された両画像を重ね合わせ、両画像間のズレδを検知するステップと、(d)上記ズレδに基づき、観者の視点位置の移動量を例えば角度として算出し、当該移動量に基づき上記撮影時の観者の視点位置を求めるステップと、(e)求められた観者の視点位置から見た3Dポリゴン画像の擬似3次元的な2次元画像データを作成するステップと、を順次実行することを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ゲーム機等のディスプレイ装置への画像表示技術に関し、特に、観者の視点位置の移動に対応した立体オブジェクトの擬似3次元的な画像を表示する方法及び装置に関するものである。
【背景技術】
【0002】
例えば、下記の特許文献1〜3には、ゲーム機等における画像表示方法や装置、プログラム等が開示されている。
一般に、立体オブジェクトの3次元ポリゴン画像を2次元画面に表示するときは、立体オブジェクトに対する視点の相対位置が重要である。
視点から見た立体オブジェクトの映像を擬似3次元的な2次元画像として2次元画面に表示する必要があるからである。
オートバイ走行ゲームなどでは常時ライダー(プレイヤ)の頭部が左右に移動するが、その絶えず移動する視点位置から見た情景がリアルに画面に表示されなければならない。
従って、世界座標系の中の3次元ポリゴン画像を、視点から見た擬似3次元的な2次元画像として表示するためには、プレイヤの目(頭)の位置を検出する位置センサが必要であった。
しかしながら、従来の方法でリアルな擬似3次元画像を得ようとしても、プレイヤの頭部位置を検出し得るセンサとして、精度と信頼性の高いものは提案されておらず、また、プレイヤの頭部位置が知られたとしても、その後の演算量が膨大となり、コストの制約が多いゲーム機では結局、さほどリアルな映像は表示できないという問題があった。
【0003】
【特許文献1】特開2006−259358号公報
【特許文献2】特開2006−075218号公報
【特許文献3】特開2005−242463号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
本発明は、上記の問題点を解決するためなされたものであり、その目的とするところは、高度なセンサを用いることなく、3次元ポリゴン画像を擬似3次元画像としてリアルに2次元画面に表示し得る画像表示方法及び装置を提供することにある。
また、ゲーム機などにおいて、プレイヤが特殊なコントローラや検知器を体に装着したり、それらを操作したりする必要なく、リアルな画面表示を可能とする画像表示方法及び装置を提供することにある。
【課題を解決するための手段】
【0005】
上記の目的を達成するための本発明の構成の概要は次のとおりである。
光軸が共通となるように、かつ、被写体までの距離が異なるように取り付けられた2台のカメラA及びBを備えた複合カメラ装置を用いて、ディスプレイ画面の観者(ビデオゲームの場合には、そのゲームのプレイヤが「観者」に該当)の頭部を撮影する。
複合カメラ装置のボディ内にはその光軸Oに対して45°の角度でハーフミラーが設けられ、一方のカメラAでは、ハーフミラーを透過した被写体映像を撮影し、もう一方のカメラBでは、ハーフミラーで反射された被写体映像を撮影するようになっている。
ハーフミラーを透過し直進する光の中心軸を光軸OA、反射して光軸OAに対して直角方向に進む光の中心軸を光軸OBとする。
光軸OA、OB上のカメラA、Bは光学的に同一特性のものを用いるが、これらのカメラとハーフミラーとの距離DA、DBはそれぞれ異なっている。
今、DA>DBであるとする。
カメラAで得られる画像サイズは、カメラBで得られる画像サイズより小さいが、その比率Kは、(D+DA)、(D+DB)から算出できる。ここで、Dは、共通光軸O上での観者の頭部とハーフミラーの距離である。
観者の頭部中心が、光軸O上にあるときは、カメラAで得られる画像をK倍に拡大すると、カメラBで得られる画像と重なる拡大画像が得られる。
観者の頭部中心が、光軸O上からΔだけ直角方向に移動すると、カメラAで得られる画像の拡大画像は、カメラBで得られる画像と重ならなくなり、ズレδを生じる。
このズレδから、観者の頭部移動量Δが知られる。
そして、この頭部移動量Δから、3次元ポリゴンで描画されているオブジェクトの擬似3次元的な2次元画像の視点移動に伴う変化を算出することができる。
観者の頭部移動量Δが正確に知られさえすれば、上記視点移動に伴う変化の演算自体は極めて簡単であり、このためリアルで高速な画面変換が可能となる。
【0006】
前記の目的を達成するため、本発明に係る画像表示方法は、具体的には、
視点位置が設定されたとき、立体オブジェクトの3次元ポリゴン画像から、当該設定された視点位置から見た擬似3次元的な2次元画像データを作成する画像演算プログラムを実行することにより、視点位置に対応した立体オブジェクトの擬似3次元的な2次元画像を表示する方法において、
下記(a)項ないし(d)項に記載のステップ、即ち、
(a)被写体となる観者の存在すべき基準位置へ向けられた第1カメラと、第1カメラの光軸上において第1カメラから距離DAの位置に第1カメラの光軸に対し45°傾斜して設けられ、被写体からの光線を第1カメラへ透過させるハーフミラーと、上記第1カメラと同一の光学特性を有し、上記ハーフミラーで反射された被写体からの光線を受光するよう第1カメラの光軸と直交する光軸上においてハーフミラーから前記距離DAとは異なる値の距離DBの位置に設けられた第2カメラと、を備えた複合カメラ装置の当該第1及び第2カメラにより被写体を同時に自動撮影する両カメラ同時撮影ステップと、
(b)予めインストールされた画像サイズ調整プログラムを実行し、上記第1カメラにより撮影した画像サイズに、被写体から第1カメラまでの距離(D+DA:ここでDは、被写体からハーフミラーまでの距離)と被写体から第2カメラまでの距離(D+DB)との比率Kを乗じることにより、第1カメラにより撮影した画像サイズと第2カメラにより撮影した画像サイズを同一サイズとする同一サイズ化ステップと、
(c)予めインストールされた画像ズレ検知プログラムを実行し、画像サイズが同一化された第1及び第2カメラによる撮影画像のズレδを検知するステップと、
(d)予めインストールされた視点位置算出プログラムを実行し、上記ズレδに基づき、観者の視点位置の前記基準位置からの移動量を算出し、当該移動量に基づき上記撮影時の観者の視点位置を求めるステップと、
を実行することにより、当該2次元画像の観者の視点位置を所定の短時間間隔で順次求め、これらの視点位置を上記画像演算プログラムに順次設定することにより、当該観者の視点位置に対応した立体オブジェクトの擬似3次元的な2次元画像を順次表示するように構成されたことを特徴とするものである。
【0007】
また、上記の本発明に係る画像表示方法を実施するための本発明に係る画像表示装置は、
デジタルビデオ信号による画像を表示するディスプレイ装置と、
視点位置が設定されたとき、立体オブジェクトの3次元ポリゴン画像から、当該設定された視点位置から見た擬似3次元的な2次元画像データを作成する画像演算プログラムがインストールされており、その画像演算プログラムに従い、上記ディスプレイ装置に表示すべき、設定された視点位置に対応した立体オブジェクトの擬似3次元的な2次元画像の画像信号を発生させる画像演算装置と、
上記画像演算装置から得られた画像信号をディスプレイ装置への入力用ビデオ信号に変換し、ディスプレイ装置に供給する画像信号変換回路と、
を備えた、視点位置に対応した立体オブジェクトの擬似3次元的な2次元画像を表示する装置において、
下記(e)項ないし(i)項に記載の構成要素、即ち、
(e)被写体となる観者の存在すべき基準位置へ向けられた第1カメラと、第1カメラの光軸上において第1カメラから距離DAの位置に第1カメラの光軸に対し45°傾斜して設けられ、被写体からの光線を第1カメラへ透過させるハーフミラーと、上記第1カメラと同一の光学特性を有し、上記ハーフミラーで反射された被写体からの光線を受光するよう第1カメラの光軸と直交する光軸上においてハーフミラーから前記距離DAとは異なる値の距離DBの位置に設けられた第2カメラと、を備え、撮影を指令する作動信号を受けたとき、上記第1及び第2カメラにより被写体を同時に撮影する複合カメラ装置と、
(f)予めインストールされた画像サイズ調整プログラムを実行し、上記第1カメラにより撮影した画像サイズに、被写体から第1カメラまでの距離(D+DA:ここでDは、被写体からハーフミラーまでの距離)と被写体から第2カメラまでの距離(D+DB)との比率Kを乗じることにより、第1カメラにより撮影した画像サイズと第2カメラにより撮影した画像サイズを同一サイズとする同一サイズ化演算回路と、
(g)予めインストールされた画像ズレ検知プログラムを実行し、画像サイズが同一化された上記第1及び第2カメラによる撮影画像のズレδを検知するズレ検知回路と、
(h)予めインストールされた視点位置算出プログラムを実行し、上記ズレδに基づき、観者の視点位置の前記基準位置からの移動量を算出し、当該移動量に基づき上記撮影時の観者の視点位置データを出力する視点位置算出回路と、
(i)予めインストールされた作動制御プログラムを実行し、上記複合カメラ装置、同一サイズ化演算回路、ズレ検知回路及び視点位置算出回路を所定の短時間間隔で順次繰り返し作動させ、そのつど得られた観者の視点位置データを上記画像演算装置に入力させて、各視点位置に対応した立体オブジェクトの2次元画像を上記ディスプレイ装置に順次表示せしめる作動制御回路と、
を具備することを特徴とするものである。
【発明の効果】
【0008】
上記の如き構成であると、2台のカメラで撮影された観者の頭部の画像のズレに基づいて、観者の視点位置が求められるので、3Dポリゴン画像からこの視点位置の移動に対応した擬似3次元的な2次元画像を容易に作成できる。
そのため、高度なセンサを用いることなく、また、特殊なコントローラや検知器を体に装着したり、それらを操作したりすることなく、擬似3次元的なリアルな映像表現が可能な表示方法及び装置を提供し得るものである。
【発明を実施するための最良の形態】
【0009】
以下、図面を参照しつつ、本発明を実施するための最良の形態について説明する。
図1は、本発明に係る画像表示方法を実施する装置において用いられる複合カメラ装置の一実施例の概要を示す断面図、
図2は、本発明に係る画像表示方法の原理を示す説明図、
図3は、本発明に係る画像表示方法の実行ステップを示すフローチャート、
図4は、本発明に係る画像表示方法を実施する装置の回路構成の一実施例を示すブロック図、
図5は、通常の2次元画像と、擬似3次元画像とを比較して示す説明図、
図6は、本発明に係る画像表示方法による擬似3次元画像の表示形態を示す説明図である。
【0010】
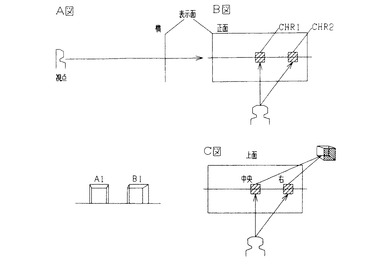
先ず、図5により、通常の2次元画像と、実際の立体オブジェクトの見え方とを比較して説明する。
図5中のA図及びB図に示したような2次元の表示面(CRTや液晶表示盤)に、CHR1、CHR2のような四角形が表示されているとする。このとき、表示面は2次元的な「面」であるため、CHR1とCHR2を見ている観者の視線間にB図に示すような角度差が生じていても、厚みを持たない四角形が画面に表示されるだけとなる。
しかしながら、図5のC図のように、テーブルの上に立方体を置いた場合、実際に見えるのは、中央の立方体については、A1で示すような奥行きのある擬似3次元的な図形であり、右側の立方体については、B1で示すような右奥方向へ斜めに奥行きのある擬似3次元的な図形となる。
【0011】
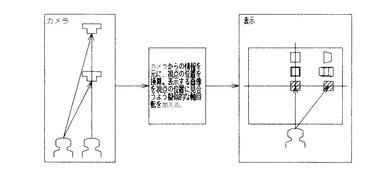
そこで、本発明においては、図6に示す如く、2台のカメラA及びBで観者の頭部を撮影し、その撮影した画像データを元に、観者の視点位置を求めるようにする。
次いで、あらかじめ用意された例えば図5のC図に示すような立方体の3次元ポリゴンデータについて、上記で求めた視点位置を基準として画像処理を行い、図5のC図にA1、B1で示すような観者の視点位置の変化に伴う奥行き感のある擬似3次元的な画像の表示を可能とするものである。
【0012】
以下、図1〜図4を参照しつつ、本発明の構成について具体的に説明する。
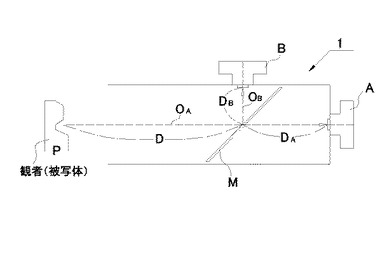
図1は、本発明に係る画像表示方法を実施する装置において用いられる複合カメラ装置の一実施例を示しており、この複合カメラ装置1は、2台のカメラA及びBを有し、これらのカメラは、ハーフミラーMを介することで、同一光軸上にありながら、被写体である観者Pから互いに異なった距離に配置されている。
即ち、第1カメラAは、被写体となる観者Pの存在すべき基準位置へ向けて配置される。
ハーフミラーMは、第1カメラの光軸OA上において第1カメラから距離DAの位置に、第1カメラの光軸に対し45°傾斜して設けられ、被写体Pからの光線を第1カメラへ向けて透過させる。
第2カメラBは、第1カメラAと同一の光学特性を有し、ハーフミラーMで反射された被写体Pからの光線を受光するよう第1カメラの光軸OAと直交する光軸OB上においてハーフミラーMから前記距離DAとは異なる値の距離DBの位置に設けられる。
これらのカメラA及びBは、後述する作動制御回路201e(図4)からの作動信号により、観者Pを同時に撮影するようになっている。
このような2台のカメラによる同時撮影は、観者Pの視点移動をなるべく忠実にフォローし、また、表示される画像の動画としての動きが滑らかとなるように、通常の動画の駒送りと同様に、短かい時間間隔(望ましくは、1/24秒程度の間隔)で連写し続けるようにして行なわれる。
【0013】
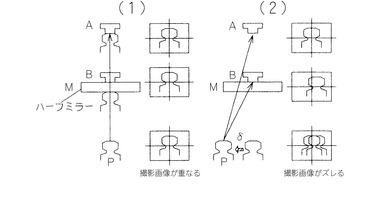
次に、上記の如くしてカメラA及びBにより同時撮影された観者Pの頭部の画像から、観者P(視点位置)の移動量(カメラに対する移動角度等)を検知する原理について、図2を参照しつつ説明する。
なお、説明を分かりやすくするため、ハーフミラーMを介して観者Pの頭部を撮影するカメラBについては、カメラAの光軸上に重ねて描いてある。
図2(1)のように、カメラA及びBに対して、観者Pがカメラの光軸と同一線上(基準位置)にある場合には、撮影済みの両画像の一方の画像サイズ(形状)に、観者PからカメラAまでの距離(D+DA)とカメラB(D+DB)までの距離の比率Kを乗じる補正を行なえば、両画像のサイズは同じになり、両画像は座標上の同じ位置で、ズレることなく重なり合うものである。
【0014】
しかしながら、図2(2)のように、カメラA及びBに対して、観者Pがカメラの光軸からオフセットした場合(観者Pが基準位置から移動した場合)には、図中の矢印で示すように、カメラAとカメラBとでは、観者Pに対する角度が異なり、そのため両カメラの撮像面における撮影領域にズレを生じることになる。
そのため、図2(1)の場合と同様に画像サイズの補正を行ない両カメラによる撮影画像のサイズを同一にしたとしても、両画像が座標上の同じ位置で重なり合うことはなく、ズレδを生じることになる。
そこで、これらの両画像が重なるように、どちらかの画像をXY座標上で移動させる操作を行ない、その移動量δを測れば、観者P(視点位置)の基準位置からの移動量(角度等)を求めることができる。
この求められた視点位置に基づき、画像演算プログラムにより前記立方体の3次元ポリゴン画像から2次元画像を作成すれば、図5のC図又は図6に示したような擬似3次元的な2次元画像を作成、表示できるものである。
【0015】
以上の操作を毎秒24回程度繰り返し行なうことにより、所望の立体オブジェクトを観者の視点位置の移動に追従した円滑な擬似3次元的な動画として表示することができる。
【0016】
なお、上記画像処理において、カメラA及びBで撮影した画像のサイズの同一化補正を行なう必要があるのは、図1に示す如く、被写体(観者の頭部)からカメラAまでの距離(D+DA)とカメラBまでの距離(D+DB)とを異ならせてあるため、両カメラで撮影された画像には遠近差によるサイズの差が生じ、両画像を重ね合わせる際には、同一サイズ化する必要があるためである。
【0017】
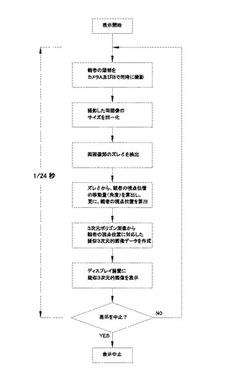
以上を整理すれば、本発明の擬似3次元的な画像の表示方法は、以下のステップを繰り返すことにより構成される。
なお、これを要約して、図3にフローチャートで描いてある。
(a)カメラA及びBによる同時自動撮影ステップ
前記複合カメラ装置1の第1カメラA及び第2カメラBにより観者の頭部を同時に自動撮影するステップである。
(b)両カメラにより撮影した画像サイズを同一化するステップ
予めインストールされた画像サイズ調整プログラムを実行し、上記第1カメラにより撮影した画像サイズに、被写体から第1カメラまでの距離(D+DA:ここでDは、被写体からハーフミラーまでの距離)と被写体から第2カメラまでの距離(D+DB)との比率Kを乗じることにより、第1カメラにより撮影した画像サイズと第2カメラにより撮影した画像サイズを同一サイズとするステップである。
(c)両カメラにより撮影した画像間のズレδを検知するステップ
予めインストールされた画像ズレ検知プログラムを実行し、画像サイズが同一化された上記第1及び第2カメラによる撮影画像を重ね合わせてみて、ズレδを検知するステップである。
(d)撮影時の観者の視点位置を求めるステップ
予めインストールされた視点位置算出プログラムを実行し、上記ズレδに基づき、観者の視点位置の前記基準位置からの移動量を、望ましくは角度として算出し、当該移動量に基づき上記撮影時の観者の視点位置を求めるステップである。
(e)求めた視点位置から見た立体オブジェクトの擬似3次元的な画像データを作成するステップ
視点位置が設定されたとき、立体オブジェクトの3次元ポリゴン画像から、当該設定された視点位置から見た擬似3次元的な2次元画像データを作成する画像演算プログラムを実行することにより、撮影時の観者の視点位置に対応した立体オブジェクトの擬似3次元的な2次元画像データを作成するステップである。
(f)ディスプレイ装置に表示するステップ
上記ステップで得られた観者の視点位置に対応した擬似3次元的な2次元画像データにより、当該画像をディスプレイ装置に表示するステップである。
(g)上記aからfまでのステップを短時間間隔で繰り返すステップ
上記aからfまでのステップを約1/24秒間で完了し、同様の操作を繰り返し行なうことにより、観者の視点位置の移動に対応した立体オブジェクトの画像の動きを、1秒間に約24コマ送りの擬似3次元的な動画として表示するステップである。
【0018】
次に、図4を参照しつつ、上記本発明方法を実施するための本発明装置について説明する。
図4中、1は、前記の如く2台のカメラA及びBを備えた複合カメラ装置、2は中央制御装置、3はディスプレイ装置である。
中央制御装置2中において、201はCPU等から成る演算装置、202はクロック回路、203はハードディスクドライブ等から成る記憶装置、204はROM、205はRAM、206は画像信号変換回路、207データバス、208はI/Oポートである。
【0019】
複合カメラ装置1は、前記の如く、その2台のカメラA及びBにより観者の頭部を同時に撮影し、撮影された画像データを中央制御装置2へ送出するようになっている。
中央制御装置2は、その記憶装置203にインストールされた画像演算プログラムを、CPU等から成る演算装置201等で実行することにより、観者の視点位置に対応した擬似3次元的な2次元画像データを発生させる機能を有する。
ディスプレイ装置3は、液晶表示盤等から成るデジタルビデオ信号による映像表示器である。
なお、図4には、本発明に係る擬似3次元的な画像を表示するための回路要素のみが示されており、本発明の表示装置が例えばゲーム装置に組み込まれた場合におけるゲーム装置関連の回路要素は、省略されている。
【0020】
中央制御装置2における演算装置201はCPU等から成り、記憶装置203にインストールされたコンピュータープログラムに従い、複合カメラ装置1から入力される観者の頭部の画像データから観者の視点位置を求め、これに基づき擬似3次元的な画像データを出力する機能を有する。
クロック回路202は、ゲーム機中の各種デジタル演算処理のためのベースとなるクロックパルスを発振する回路であり、各種の時間管理等を行うためにも重要な役割を果たすものである。
【0021】
記憶装置203には、本発明における観者の視点位置に対応した擬似3次元的な画像表示のための画像演算プログラムや、表示すべき各種立体オブジェクトの3Dポリゴン画像データ等がインストールされている。
【0022】
ROM204には、装置全体の管理データ、装置内の各機器の初期設定データ、等々が記録されている。
RAM205は、演算装置201の動作に必要なデータの授受を演算装置201との間で行なう。
画像信号変換回路206は、演算装置201における画像演算装置201aで得られた画像信号をディスプレイ装置3への入力用ビデオ信号に変換し、ディスプレイ装置3に供給する。
データバス207は、上記各種回路間のデータ伝送線路である。
I/Oポート208は、複合カメラ装置1と中央制御装置2とを接続するインターフェイスである。
【0023】
以下、中央制御装置2における演算装置201の構成について説明する。
同一サイズ化演算回路201bは、複合カメラ装置1から入力された第1カメラA及び第2カメラBの画像データに対して、両画像の画像サイズを同一サイズ化する画像演算処理を行なう。
即ち、予めインストールされた画像サイズ調整プログラムを実行し、第1カメラにより撮影した画像サイズに、被写体から第1カメラまでの距離(D+DA)と被写体から第2カメラまでの距離(D+DB)との比率Kを乗じることにより、第1カメラにより撮影した画像サイズと第2カメラにより撮影した画像サイズを同一サイズとする演算処理を行なう。
ズレ検知回路201cは、予めインストールされた画像ズレ検知プログラムを実行し、画像サイズが同一化された上記第1及び第2カメラによる撮影画像のズレδを検知する。
視点位置算出回路201dは、予めインストールされた視点位置算出プログラムを実行し、上記ズレδに基づき、観者の視点位置の前記基準位置からの移動量を、通常は角度として算出し、当該移動量に基づき上記撮影時の観者の視点位置データを出力する。
【0024】
画像演算装置201aには、視点位置が設定されたとき、立体オブジェクトの3次元ポリゴン画像から、当該設定された視点位置から見た擬似3次元的な2次元画像データを作成する画像演算プログラムがインストールされており、視点位置算出回路201dにおいて観者の視点位置が求められたとき、上記画像演算プログラムに従い、設定された視点位置に対応した立体オブジェクトの擬似3次元的な2次元画像の画像信号を発生させる。
画像信号変換回路206は、上記画像演算装置201aで得られた画像信号をディスプレイ装置3への入力用ビデオ信号に変換し、ディスプレイ装置に供給する。
作動制御回路201eは、予めインストールされた作動制御プログラムを実行し、上記複合カメラ装置1、同一サイズ化演算回路201b、ズレ検知回路201c、視点位置算出回路201d及び画像演算装置201aを順次作動させる指令信号を、所定の短時間間隔(望ましくは、1/24秒程度)で繰り返し発信し、そのつど得られた立体オブジェクトの擬似3次元的な2次元画像データを上記ディスプレイ装置に順次送って、観者の視点位置から見た擬似3次元的な動画として表示せしめる。
なお、これらの画像演算装置201a、同一サイズ化演算回路201b、ズレ検知回路201c、視点位置算出回路201d及び作動制御回路201eは、記憶装置203から読み出されたコンピュータプログラムが、演算装置201のハードウェア資源(CPU等)と協働することによって構築されるものである。
以上の構成を有する本発明に係る表示装置を用いることにより、前記の本発明方法を好適に実施でき、これにより、観者の視点位置の移動に対応した立体オブジェクトの擬似3次元的なリアルな動画表現が可能となる。
【0025】
なお、本発明は上記の実施例に限定されるものではなく、その目的の範囲内において、上記の説明から当業者が容易に想到し得るすべての変更実施例を包摂するものである。
【産業上の利用可能性】
【0026】
本発明は上記の如く構成され、2台のカメラで撮影された観者の頭部の画像のズレに基づいて、観者の視点位置が求められるので、この視点位置の移動に対応した擬似3次元的な2次元画像を容易に作成できる。そのため、高度なセンサを用いることなく、また、特殊なコントローラや検知器を体に装着したり、それらを操作したりすることなく、擬似3次元的なリアルな映像表現が可能な表示方法及び装置を提供し得るものであるから、産業上多大の利用可能性を有するものである。
【図面の簡単な説明】
【0027】
【図1】本発明に係る画像表示方法を実施する装置において用いられる複合カメラ装置の一実施例の概要を示す断面図である。
【図2】本発明に係る画像表示方法の原理を示す説明図である。
【図3】本発明に係る画像表示方法の実行ステップを示すフローチャートである。
【図4】本発明に係る画像表示方法を実施する装置の回路構成の一実施例を示すブロック図である。
【図5】通常の2次元画像と、擬似3次元画像とを比較して示す説明図である。
【図6】本発明に係る画像表示方法による擬似3次元画像の表示形態を示す説明図である。
【符号の説明】
【0028】
1 複合カメラ装置
A,B カメラ
M ハーフミラー
2 中央制御装置
201 演算装置
201a 画像演算装置
201b 同一サイズ化演算装置
201c ズレ検知回路
201d 視点位置算出回路
201e 作動制御回路
202 クロック回路
203 記憶装置
204 ROM
205 RAM
206 画像信号変換回路
207 データバス
208 I/Oポート
3 ディスプレイ装置
【技術分野】
【0001】
本発明は、ゲーム機等のディスプレイ装置への画像表示技術に関し、特に、観者の視点位置の移動に対応した立体オブジェクトの擬似3次元的な画像を表示する方法及び装置に関するものである。
【背景技術】
【0002】
例えば、下記の特許文献1〜3には、ゲーム機等における画像表示方法や装置、プログラム等が開示されている。
一般に、立体オブジェクトの3次元ポリゴン画像を2次元画面に表示するときは、立体オブジェクトに対する視点の相対位置が重要である。
視点から見た立体オブジェクトの映像を擬似3次元的な2次元画像として2次元画面に表示する必要があるからである。
オートバイ走行ゲームなどでは常時ライダー(プレイヤ)の頭部が左右に移動するが、その絶えず移動する視点位置から見た情景がリアルに画面に表示されなければならない。
従って、世界座標系の中の3次元ポリゴン画像を、視点から見た擬似3次元的な2次元画像として表示するためには、プレイヤの目(頭)の位置を検出する位置センサが必要であった。
しかしながら、従来の方法でリアルな擬似3次元画像を得ようとしても、プレイヤの頭部位置を検出し得るセンサとして、精度と信頼性の高いものは提案されておらず、また、プレイヤの頭部位置が知られたとしても、その後の演算量が膨大となり、コストの制約が多いゲーム機では結局、さほどリアルな映像は表示できないという問題があった。
【0003】
【特許文献1】特開2006−259358号公報
【特許文献2】特開2006−075218号公報
【特許文献3】特開2005−242463号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
本発明は、上記の問題点を解決するためなされたものであり、その目的とするところは、高度なセンサを用いることなく、3次元ポリゴン画像を擬似3次元画像としてリアルに2次元画面に表示し得る画像表示方法及び装置を提供することにある。
また、ゲーム機などにおいて、プレイヤが特殊なコントローラや検知器を体に装着したり、それらを操作したりする必要なく、リアルな画面表示を可能とする画像表示方法及び装置を提供することにある。
【課題を解決するための手段】
【0005】
上記の目的を達成するための本発明の構成の概要は次のとおりである。
光軸が共通となるように、かつ、被写体までの距離が異なるように取り付けられた2台のカメラA及びBを備えた複合カメラ装置を用いて、ディスプレイ画面の観者(ビデオゲームの場合には、そのゲームのプレイヤが「観者」に該当)の頭部を撮影する。
複合カメラ装置のボディ内にはその光軸Oに対して45°の角度でハーフミラーが設けられ、一方のカメラAでは、ハーフミラーを透過した被写体映像を撮影し、もう一方のカメラBでは、ハーフミラーで反射された被写体映像を撮影するようになっている。
ハーフミラーを透過し直進する光の中心軸を光軸OA、反射して光軸OAに対して直角方向に進む光の中心軸を光軸OBとする。
光軸OA、OB上のカメラA、Bは光学的に同一特性のものを用いるが、これらのカメラとハーフミラーとの距離DA、DBはそれぞれ異なっている。
今、DA>DBであるとする。
カメラAで得られる画像サイズは、カメラBで得られる画像サイズより小さいが、その比率Kは、(D+DA)、(D+DB)から算出できる。ここで、Dは、共通光軸O上での観者の頭部とハーフミラーの距離である。
観者の頭部中心が、光軸O上にあるときは、カメラAで得られる画像をK倍に拡大すると、カメラBで得られる画像と重なる拡大画像が得られる。
観者の頭部中心が、光軸O上からΔだけ直角方向に移動すると、カメラAで得られる画像の拡大画像は、カメラBで得られる画像と重ならなくなり、ズレδを生じる。
このズレδから、観者の頭部移動量Δが知られる。
そして、この頭部移動量Δから、3次元ポリゴンで描画されているオブジェクトの擬似3次元的な2次元画像の視点移動に伴う変化を算出することができる。
観者の頭部移動量Δが正確に知られさえすれば、上記視点移動に伴う変化の演算自体は極めて簡単であり、このためリアルで高速な画面変換が可能となる。
【0006】
前記の目的を達成するため、本発明に係る画像表示方法は、具体的には、
視点位置が設定されたとき、立体オブジェクトの3次元ポリゴン画像から、当該設定された視点位置から見た擬似3次元的な2次元画像データを作成する画像演算プログラムを実行することにより、視点位置に対応した立体オブジェクトの擬似3次元的な2次元画像を表示する方法において、
下記(a)項ないし(d)項に記載のステップ、即ち、
(a)被写体となる観者の存在すべき基準位置へ向けられた第1カメラと、第1カメラの光軸上において第1カメラから距離DAの位置に第1カメラの光軸に対し45°傾斜して設けられ、被写体からの光線を第1カメラへ透過させるハーフミラーと、上記第1カメラと同一の光学特性を有し、上記ハーフミラーで反射された被写体からの光線を受光するよう第1カメラの光軸と直交する光軸上においてハーフミラーから前記距離DAとは異なる値の距離DBの位置に設けられた第2カメラと、を備えた複合カメラ装置の当該第1及び第2カメラにより被写体を同時に自動撮影する両カメラ同時撮影ステップと、
(b)予めインストールされた画像サイズ調整プログラムを実行し、上記第1カメラにより撮影した画像サイズに、被写体から第1カメラまでの距離(D+DA:ここでDは、被写体からハーフミラーまでの距離)と被写体から第2カメラまでの距離(D+DB)との比率Kを乗じることにより、第1カメラにより撮影した画像サイズと第2カメラにより撮影した画像サイズを同一サイズとする同一サイズ化ステップと、
(c)予めインストールされた画像ズレ検知プログラムを実行し、画像サイズが同一化された第1及び第2カメラによる撮影画像のズレδを検知するステップと、
(d)予めインストールされた視点位置算出プログラムを実行し、上記ズレδに基づき、観者の視点位置の前記基準位置からの移動量を算出し、当該移動量に基づき上記撮影時の観者の視点位置を求めるステップと、
を実行することにより、当該2次元画像の観者の視点位置を所定の短時間間隔で順次求め、これらの視点位置を上記画像演算プログラムに順次設定することにより、当該観者の視点位置に対応した立体オブジェクトの擬似3次元的な2次元画像を順次表示するように構成されたことを特徴とするものである。
【0007】
また、上記の本発明に係る画像表示方法を実施するための本発明に係る画像表示装置は、
デジタルビデオ信号による画像を表示するディスプレイ装置と、
視点位置が設定されたとき、立体オブジェクトの3次元ポリゴン画像から、当該設定された視点位置から見た擬似3次元的な2次元画像データを作成する画像演算プログラムがインストールされており、その画像演算プログラムに従い、上記ディスプレイ装置に表示すべき、設定された視点位置に対応した立体オブジェクトの擬似3次元的な2次元画像の画像信号を発生させる画像演算装置と、
上記画像演算装置から得られた画像信号をディスプレイ装置への入力用ビデオ信号に変換し、ディスプレイ装置に供給する画像信号変換回路と、
を備えた、視点位置に対応した立体オブジェクトの擬似3次元的な2次元画像を表示する装置において、
下記(e)項ないし(i)項に記載の構成要素、即ち、
(e)被写体となる観者の存在すべき基準位置へ向けられた第1カメラと、第1カメラの光軸上において第1カメラから距離DAの位置に第1カメラの光軸に対し45°傾斜して設けられ、被写体からの光線を第1カメラへ透過させるハーフミラーと、上記第1カメラと同一の光学特性を有し、上記ハーフミラーで反射された被写体からの光線を受光するよう第1カメラの光軸と直交する光軸上においてハーフミラーから前記距離DAとは異なる値の距離DBの位置に設けられた第2カメラと、を備え、撮影を指令する作動信号を受けたとき、上記第1及び第2カメラにより被写体を同時に撮影する複合カメラ装置と、
(f)予めインストールされた画像サイズ調整プログラムを実行し、上記第1カメラにより撮影した画像サイズに、被写体から第1カメラまでの距離(D+DA:ここでDは、被写体からハーフミラーまでの距離)と被写体から第2カメラまでの距離(D+DB)との比率Kを乗じることにより、第1カメラにより撮影した画像サイズと第2カメラにより撮影した画像サイズを同一サイズとする同一サイズ化演算回路と、
(g)予めインストールされた画像ズレ検知プログラムを実行し、画像サイズが同一化された上記第1及び第2カメラによる撮影画像のズレδを検知するズレ検知回路と、
(h)予めインストールされた視点位置算出プログラムを実行し、上記ズレδに基づき、観者の視点位置の前記基準位置からの移動量を算出し、当該移動量に基づき上記撮影時の観者の視点位置データを出力する視点位置算出回路と、
(i)予めインストールされた作動制御プログラムを実行し、上記複合カメラ装置、同一サイズ化演算回路、ズレ検知回路及び視点位置算出回路を所定の短時間間隔で順次繰り返し作動させ、そのつど得られた観者の視点位置データを上記画像演算装置に入力させて、各視点位置に対応した立体オブジェクトの2次元画像を上記ディスプレイ装置に順次表示せしめる作動制御回路と、
を具備することを特徴とするものである。
【発明の効果】
【0008】
上記の如き構成であると、2台のカメラで撮影された観者の頭部の画像のズレに基づいて、観者の視点位置が求められるので、3Dポリゴン画像からこの視点位置の移動に対応した擬似3次元的な2次元画像を容易に作成できる。
そのため、高度なセンサを用いることなく、また、特殊なコントローラや検知器を体に装着したり、それらを操作したりすることなく、擬似3次元的なリアルな映像表現が可能な表示方法及び装置を提供し得るものである。
【発明を実施するための最良の形態】
【0009】
以下、図面を参照しつつ、本発明を実施するための最良の形態について説明する。
図1は、本発明に係る画像表示方法を実施する装置において用いられる複合カメラ装置の一実施例の概要を示す断面図、
図2は、本発明に係る画像表示方法の原理を示す説明図、
図3は、本発明に係る画像表示方法の実行ステップを示すフローチャート、
図4は、本発明に係る画像表示方法を実施する装置の回路構成の一実施例を示すブロック図、
図5は、通常の2次元画像と、擬似3次元画像とを比較して示す説明図、
図6は、本発明に係る画像表示方法による擬似3次元画像の表示形態を示す説明図である。
【0010】
先ず、図5により、通常の2次元画像と、実際の立体オブジェクトの見え方とを比較して説明する。
図5中のA図及びB図に示したような2次元の表示面(CRTや液晶表示盤)に、CHR1、CHR2のような四角形が表示されているとする。このとき、表示面は2次元的な「面」であるため、CHR1とCHR2を見ている観者の視線間にB図に示すような角度差が生じていても、厚みを持たない四角形が画面に表示されるだけとなる。
しかしながら、図5のC図のように、テーブルの上に立方体を置いた場合、実際に見えるのは、中央の立方体については、A1で示すような奥行きのある擬似3次元的な図形であり、右側の立方体については、B1で示すような右奥方向へ斜めに奥行きのある擬似3次元的な図形となる。
【0011】
そこで、本発明においては、図6に示す如く、2台のカメラA及びBで観者の頭部を撮影し、その撮影した画像データを元に、観者の視点位置を求めるようにする。
次いで、あらかじめ用意された例えば図5のC図に示すような立方体の3次元ポリゴンデータについて、上記で求めた視点位置を基準として画像処理を行い、図5のC図にA1、B1で示すような観者の視点位置の変化に伴う奥行き感のある擬似3次元的な画像の表示を可能とするものである。
【0012】
以下、図1〜図4を参照しつつ、本発明の構成について具体的に説明する。
図1は、本発明に係る画像表示方法を実施する装置において用いられる複合カメラ装置の一実施例を示しており、この複合カメラ装置1は、2台のカメラA及びBを有し、これらのカメラは、ハーフミラーMを介することで、同一光軸上にありながら、被写体である観者Pから互いに異なった距離に配置されている。
即ち、第1カメラAは、被写体となる観者Pの存在すべき基準位置へ向けて配置される。
ハーフミラーMは、第1カメラの光軸OA上において第1カメラから距離DAの位置に、第1カメラの光軸に対し45°傾斜して設けられ、被写体Pからの光線を第1カメラへ向けて透過させる。
第2カメラBは、第1カメラAと同一の光学特性を有し、ハーフミラーMで反射された被写体Pからの光線を受光するよう第1カメラの光軸OAと直交する光軸OB上においてハーフミラーMから前記距離DAとは異なる値の距離DBの位置に設けられる。
これらのカメラA及びBは、後述する作動制御回路201e(図4)からの作動信号により、観者Pを同時に撮影するようになっている。
このような2台のカメラによる同時撮影は、観者Pの視点移動をなるべく忠実にフォローし、また、表示される画像の動画としての動きが滑らかとなるように、通常の動画の駒送りと同様に、短かい時間間隔(望ましくは、1/24秒程度の間隔)で連写し続けるようにして行なわれる。
【0013】
次に、上記の如くしてカメラA及びBにより同時撮影された観者Pの頭部の画像から、観者P(視点位置)の移動量(カメラに対する移動角度等)を検知する原理について、図2を参照しつつ説明する。
なお、説明を分かりやすくするため、ハーフミラーMを介して観者Pの頭部を撮影するカメラBについては、カメラAの光軸上に重ねて描いてある。
図2(1)のように、カメラA及びBに対して、観者Pがカメラの光軸と同一線上(基準位置)にある場合には、撮影済みの両画像の一方の画像サイズ(形状)に、観者PからカメラAまでの距離(D+DA)とカメラB(D+DB)までの距離の比率Kを乗じる補正を行なえば、両画像のサイズは同じになり、両画像は座標上の同じ位置で、ズレることなく重なり合うものである。
【0014】
しかしながら、図2(2)のように、カメラA及びBに対して、観者Pがカメラの光軸からオフセットした場合(観者Pが基準位置から移動した場合)には、図中の矢印で示すように、カメラAとカメラBとでは、観者Pに対する角度が異なり、そのため両カメラの撮像面における撮影領域にズレを生じることになる。
そのため、図2(1)の場合と同様に画像サイズの補正を行ない両カメラによる撮影画像のサイズを同一にしたとしても、両画像が座標上の同じ位置で重なり合うことはなく、ズレδを生じることになる。
そこで、これらの両画像が重なるように、どちらかの画像をXY座標上で移動させる操作を行ない、その移動量δを測れば、観者P(視点位置)の基準位置からの移動量(角度等)を求めることができる。
この求められた視点位置に基づき、画像演算プログラムにより前記立方体の3次元ポリゴン画像から2次元画像を作成すれば、図5のC図又は図6に示したような擬似3次元的な2次元画像を作成、表示できるものである。
【0015】
以上の操作を毎秒24回程度繰り返し行なうことにより、所望の立体オブジェクトを観者の視点位置の移動に追従した円滑な擬似3次元的な動画として表示することができる。
【0016】
なお、上記画像処理において、カメラA及びBで撮影した画像のサイズの同一化補正を行なう必要があるのは、図1に示す如く、被写体(観者の頭部)からカメラAまでの距離(D+DA)とカメラBまでの距離(D+DB)とを異ならせてあるため、両カメラで撮影された画像には遠近差によるサイズの差が生じ、両画像を重ね合わせる際には、同一サイズ化する必要があるためである。
【0017】
以上を整理すれば、本発明の擬似3次元的な画像の表示方法は、以下のステップを繰り返すことにより構成される。
なお、これを要約して、図3にフローチャートで描いてある。
(a)カメラA及びBによる同時自動撮影ステップ
前記複合カメラ装置1の第1カメラA及び第2カメラBにより観者の頭部を同時に自動撮影するステップである。
(b)両カメラにより撮影した画像サイズを同一化するステップ
予めインストールされた画像サイズ調整プログラムを実行し、上記第1カメラにより撮影した画像サイズに、被写体から第1カメラまでの距離(D+DA:ここでDは、被写体からハーフミラーまでの距離)と被写体から第2カメラまでの距離(D+DB)との比率Kを乗じることにより、第1カメラにより撮影した画像サイズと第2カメラにより撮影した画像サイズを同一サイズとするステップである。
(c)両カメラにより撮影した画像間のズレδを検知するステップ
予めインストールされた画像ズレ検知プログラムを実行し、画像サイズが同一化された上記第1及び第2カメラによる撮影画像を重ね合わせてみて、ズレδを検知するステップである。
(d)撮影時の観者の視点位置を求めるステップ
予めインストールされた視点位置算出プログラムを実行し、上記ズレδに基づき、観者の視点位置の前記基準位置からの移動量を、望ましくは角度として算出し、当該移動量に基づき上記撮影時の観者の視点位置を求めるステップである。
(e)求めた視点位置から見た立体オブジェクトの擬似3次元的な画像データを作成するステップ
視点位置が設定されたとき、立体オブジェクトの3次元ポリゴン画像から、当該設定された視点位置から見た擬似3次元的な2次元画像データを作成する画像演算プログラムを実行することにより、撮影時の観者の視点位置に対応した立体オブジェクトの擬似3次元的な2次元画像データを作成するステップである。
(f)ディスプレイ装置に表示するステップ
上記ステップで得られた観者の視点位置に対応した擬似3次元的な2次元画像データにより、当該画像をディスプレイ装置に表示するステップである。
(g)上記aからfまでのステップを短時間間隔で繰り返すステップ
上記aからfまでのステップを約1/24秒間で完了し、同様の操作を繰り返し行なうことにより、観者の視点位置の移動に対応した立体オブジェクトの画像の動きを、1秒間に約24コマ送りの擬似3次元的な動画として表示するステップである。
【0018】
次に、図4を参照しつつ、上記本発明方法を実施するための本発明装置について説明する。
図4中、1は、前記の如く2台のカメラA及びBを備えた複合カメラ装置、2は中央制御装置、3はディスプレイ装置である。
中央制御装置2中において、201はCPU等から成る演算装置、202はクロック回路、203はハードディスクドライブ等から成る記憶装置、204はROM、205はRAM、206は画像信号変換回路、207データバス、208はI/Oポートである。
【0019】
複合カメラ装置1は、前記の如く、その2台のカメラA及びBにより観者の頭部を同時に撮影し、撮影された画像データを中央制御装置2へ送出するようになっている。
中央制御装置2は、その記憶装置203にインストールされた画像演算プログラムを、CPU等から成る演算装置201等で実行することにより、観者の視点位置に対応した擬似3次元的な2次元画像データを発生させる機能を有する。
ディスプレイ装置3は、液晶表示盤等から成るデジタルビデオ信号による映像表示器である。
なお、図4には、本発明に係る擬似3次元的な画像を表示するための回路要素のみが示されており、本発明の表示装置が例えばゲーム装置に組み込まれた場合におけるゲーム装置関連の回路要素は、省略されている。
【0020】
中央制御装置2における演算装置201はCPU等から成り、記憶装置203にインストールされたコンピュータープログラムに従い、複合カメラ装置1から入力される観者の頭部の画像データから観者の視点位置を求め、これに基づき擬似3次元的な画像データを出力する機能を有する。
クロック回路202は、ゲーム機中の各種デジタル演算処理のためのベースとなるクロックパルスを発振する回路であり、各種の時間管理等を行うためにも重要な役割を果たすものである。
【0021】
記憶装置203には、本発明における観者の視点位置に対応した擬似3次元的な画像表示のための画像演算プログラムや、表示すべき各種立体オブジェクトの3Dポリゴン画像データ等がインストールされている。
【0022】
ROM204には、装置全体の管理データ、装置内の各機器の初期設定データ、等々が記録されている。
RAM205は、演算装置201の動作に必要なデータの授受を演算装置201との間で行なう。
画像信号変換回路206は、演算装置201における画像演算装置201aで得られた画像信号をディスプレイ装置3への入力用ビデオ信号に変換し、ディスプレイ装置3に供給する。
データバス207は、上記各種回路間のデータ伝送線路である。
I/Oポート208は、複合カメラ装置1と中央制御装置2とを接続するインターフェイスである。
【0023】
以下、中央制御装置2における演算装置201の構成について説明する。
同一サイズ化演算回路201bは、複合カメラ装置1から入力された第1カメラA及び第2カメラBの画像データに対して、両画像の画像サイズを同一サイズ化する画像演算処理を行なう。
即ち、予めインストールされた画像サイズ調整プログラムを実行し、第1カメラにより撮影した画像サイズに、被写体から第1カメラまでの距離(D+DA)と被写体から第2カメラまでの距離(D+DB)との比率Kを乗じることにより、第1カメラにより撮影した画像サイズと第2カメラにより撮影した画像サイズを同一サイズとする演算処理を行なう。
ズレ検知回路201cは、予めインストールされた画像ズレ検知プログラムを実行し、画像サイズが同一化された上記第1及び第2カメラによる撮影画像のズレδを検知する。
視点位置算出回路201dは、予めインストールされた視点位置算出プログラムを実行し、上記ズレδに基づき、観者の視点位置の前記基準位置からの移動量を、通常は角度として算出し、当該移動量に基づき上記撮影時の観者の視点位置データを出力する。
【0024】
画像演算装置201aには、視点位置が設定されたとき、立体オブジェクトの3次元ポリゴン画像から、当該設定された視点位置から見た擬似3次元的な2次元画像データを作成する画像演算プログラムがインストールされており、視点位置算出回路201dにおいて観者の視点位置が求められたとき、上記画像演算プログラムに従い、設定された視点位置に対応した立体オブジェクトの擬似3次元的な2次元画像の画像信号を発生させる。
画像信号変換回路206は、上記画像演算装置201aで得られた画像信号をディスプレイ装置3への入力用ビデオ信号に変換し、ディスプレイ装置に供給する。
作動制御回路201eは、予めインストールされた作動制御プログラムを実行し、上記複合カメラ装置1、同一サイズ化演算回路201b、ズレ検知回路201c、視点位置算出回路201d及び画像演算装置201aを順次作動させる指令信号を、所定の短時間間隔(望ましくは、1/24秒程度)で繰り返し発信し、そのつど得られた立体オブジェクトの擬似3次元的な2次元画像データを上記ディスプレイ装置に順次送って、観者の視点位置から見た擬似3次元的な動画として表示せしめる。
なお、これらの画像演算装置201a、同一サイズ化演算回路201b、ズレ検知回路201c、視点位置算出回路201d及び作動制御回路201eは、記憶装置203から読み出されたコンピュータプログラムが、演算装置201のハードウェア資源(CPU等)と協働することによって構築されるものである。
以上の構成を有する本発明に係る表示装置を用いることにより、前記の本発明方法を好適に実施でき、これにより、観者の視点位置の移動に対応した立体オブジェクトの擬似3次元的なリアルな動画表現が可能となる。
【0025】
なお、本発明は上記の実施例に限定されるものではなく、その目的の範囲内において、上記の説明から当業者が容易に想到し得るすべての変更実施例を包摂するものである。
【産業上の利用可能性】
【0026】
本発明は上記の如く構成され、2台のカメラで撮影された観者の頭部の画像のズレに基づいて、観者の視点位置が求められるので、この視点位置の移動に対応した擬似3次元的な2次元画像を容易に作成できる。そのため、高度なセンサを用いることなく、また、特殊なコントローラや検知器を体に装着したり、それらを操作したりすることなく、擬似3次元的なリアルな映像表現が可能な表示方法及び装置を提供し得るものであるから、産業上多大の利用可能性を有するものである。
【図面の簡単な説明】
【0027】
【図1】本発明に係る画像表示方法を実施する装置において用いられる複合カメラ装置の一実施例の概要を示す断面図である。
【図2】本発明に係る画像表示方法の原理を示す説明図である。
【図3】本発明に係る画像表示方法の実行ステップを示すフローチャートである。
【図4】本発明に係る画像表示方法を実施する装置の回路構成の一実施例を示すブロック図である。
【図5】通常の2次元画像と、擬似3次元画像とを比較して示す説明図である。
【図6】本発明に係る画像表示方法による擬似3次元画像の表示形態を示す説明図である。
【符号の説明】
【0028】
1 複合カメラ装置
A,B カメラ
M ハーフミラー
2 中央制御装置
201 演算装置
201a 画像演算装置
201b 同一サイズ化演算装置
201c ズレ検知回路
201d 視点位置算出回路
201e 作動制御回路
202 クロック回路
203 記憶装置
204 ROM
205 RAM
206 画像信号変換回路
207 データバス
208 I/Oポート
3 ディスプレイ装置
【特許請求の範囲】
【請求項1】
視点位置が設定されたとき、立体オブジェクトの3次元ポリゴン画像から、当該設定された視点位置から見た2次元画像データを作成する画像演算プログラムを実行することにより、視点位置に対応した立体オブジェクトの擬似3次元的な2次元画像を表示する方法において、
下記(a)項ないし(d)項に記載のステップを実行することにより、当該2次元画像の観者の視点位置を所定の短時間間隔で順次求め、これらの視点位置を上記画像演算プログラムに順次設定することにより、当該観者の視点位置に対応した立体オブジェクトの擬似3次元的な2次元画像を順次表示することを特徴とする画像表示方法。
(a)被写体となる観者の存在すべき基準位置へ向けられた第1カメラ(A)と、第1カメラの光軸(OA)上において第1カメラから距離DAの位置に第1カメラの光軸に対し45°傾斜して設けられ、被写体からの光線を第1カメラへ透過させるハーフミラー(M)と、上記第1カメラと同一の光学特性を有し、上記ハーフミラーで反射された被写体からの光線を受光するよう第1カメラの光軸(OA)と直交する光軸(OB)上においてハーフミラーから前記距離DAとは異なる値の距離DBの位置に設けられた第2カメラ(B)と、を備えた複合カメラ装置(1)の当該第1及び第2カメラにより被写体を同時に自動撮影する両カメラ同時撮影ステップ。
(b)予めインストールされた画像サイズ調整プログラムを実行し、上記第1カメラにより撮影した画像サイズに、被写体から第1カメラまでの距離(D+DA:ここでDは、被写体からハーフミラーまでの距離)と被写体から第2カメラまでの距離(D+DB)との比率Kを乗じることにより、第1カメラにより撮影した画像サイズと第2カメラにより撮影した画像サイズを同一サイズとする同一サイズ化ステップ。
(c)予めインストールされた画像ズレ検知プログラムを実行し、画像サイズが同一化された第1及び第2カメラによる撮影画像のズレδを検知するステップ。
(d)予めインストールされた視点位置算出プログラムを実行し、上記ズレδに基づき、観者の視点位置の前記基準位置からの移動量を算出し、当該移動量に基づき上記撮影時の観者の視点位置を求めるステップ。
【請求項2】
デジタルビデオ信号による画像を表示するディスプレイ装置(3)と、
視点位置が設定されたとき、立体オブジェクトの3次元ポリゴン画像から、当該設定された視点位置から見た擬似3次元的な2次元画像データを作成する画像演算プログラムがインストールされており、その画像演算プログラムに従い、上記ディスプレイ装置に表示すべき、設定された視点位置に対応した立体オブジェクトの擬似3次元的な2次元画像の画像信号を発生させる画像演算装置(201a)と、
上記画像演算装置から得られた画像信号をディスプレイ装置への入力用ビデオ信号に変換し、ディスプレイ装置に供給する画像信号変換回路(206)と、
を備えた、視点位置に対応した立体オブジェクトの擬似3次元的な2次元画像を表示する装置において、
下記(e)項ないし(i)項に記載の構成要素を具備することを特徴とする上記の2次元画像表示装置。
(e)被写体となる観者の存在すべき基準位置へ向けられた第1カメラ(A)と、第1カメラの光軸(OA)上において第1カメラから距離DAの位置に第1カメラの光軸に対し45°傾斜して設けられ、被写体からの光線を第1カメラへ透過させるハーフミラー(M)と、上記第1カメラと同一の光学特性を有し、上記ハーフミラーで反射された被写体からの光線を受光するよう第1カメラの光軸(OA)と直交する光軸(OB)上においてハーフミラーから前記距離DAとは異なる値の距離DBの位置に設けられた第2カメラ(B)と、を備え、撮影を指令する作動信号を受けたとき、上記第1及び第2カメラにより被写体を同時に撮影する複合カメラ装置(1)。
(f)予めインストールされた画像サイズ調整プログラムを実行し、上記第1カメラにより撮影した画像サイズに、被写体から第1カメラまでの距離(D+DA:ここでDは、被写体からハーフミラーまでの距離)と被写体から第2カメラまでの距離(D+DB)との比率Kを乗じることにより、第1カメラにより撮影した画像サイズと第2カメラにより撮影した画像サイズを同一サイズとする同一サイズ化演算回路(201b)。
(g)予めインストールされた画像ズレ検知プログラムを実行し、画像サイズが同一化された上記第1及び第2カメラによる撮影画像のズレδを検知するズレ検知回路(201c)。
(h)予めインストールされた視点位置算出プログラムを実行し、上記ズレδに基づき、観者の視点位置の前記基準位置からの移動量を算出し、当該移動量に基づき上記撮影時の観者の視点位置データを出力する視点位置算出回路(201d)。
(i)予めインストールされた作動制御プログラムを実行し、上記複合カメラ装置(1)、同一サイズ化演算回路(201b)、ズレ検知回路(201c)及び視点位置算出回路(201d)を所定の短時間間隔で順次繰り返し作動させ、そのつど得られた観者の視点位置データを上記画像演算装置(201a)に入力させて、各視点位置に対応した立体オブジェクトの2次元画像を上記ディスプレイ装置に順次表示せしめる作動制御回路(201e)。
【請求項1】
視点位置が設定されたとき、立体オブジェクトの3次元ポリゴン画像から、当該設定された視点位置から見た2次元画像データを作成する画像演算プログラムを実行することにより、視点位置に対応した立体オブジェクトの擬似3次元的な2次元画像を表示する方法において、
下記(a)項ないし(d)項に記載のステップを実行することにより、当該2次元画像の観者の視点位置を所定の短時間間隔で順次求め、これらの視点位置を上記画像演算プログラムに順次設定することにより、当該観者の視点位置に対応した立体オブジェクトの擬似3次元的な2次元画像を順次表示することを特徴とする画像表示方法。
(a)被写体となる観者の存在すべき基準位置へ向けられた第1カメラ(A)と、第1カメラの光軸(OA)上において第1カメラから距離DAの位置に第1カメラの光軸に対し45°傾斜して設けられ、被写体からの光線を第1カメラへ透過させるハーフミラー(M)と、上記第1カメラと同一の光学特性を有し、上記ハーフミラーで反射された被写体からの光線を受光するよう第1カメラの光軸(OA)と直交する光軸(OB)上においてハーフミラーから前記距離DAとは異なる値の距離DBの位置に設けられた第2カメラ(B)と、を備えた複合カメラ装置(1)の当該第1及び第2カメラにより被写体を同時に自動撮影する両カメラ同時撮影ステップ。
(b)予めインストールされた画像サイズ調整プログラムを実行し、上記第1カメラにより撮影した画像サイズに、被写体から第1カメラまでの距離(D+DA:ここでDは、被写体からハーフミラーまでの距離)と被写体から第2カメラまでの距離(D+DB)との比率Kを乗じることにより、第1カメラにより撮影した画像サイズと第2カメラにより撮影した画像サイズを同一サイズとする同一サイズ化ステップ。
(c)予めインストールされた画像ズレ検知プログラムを実行し、画像サイズが同一化された第1及び第2カメラによる撮影画像のズレδを検知するステップ。
(d)予めインストールされた視点位置算出プログラムを実行し、上記ズレδに基づき、観者の視点位置の前記基準位置からの移動量を算出し、当該移動量に基づき上記撮影時の観者の視点位置を求めるステップ。
【請求項2】
デジタルビデオ信号による画像を表示するディスプレイ装置(3)と、
視点位置が設定されたとき、立体オブジェクトの3次元ポリゴン画像から、当該設定された視点位置から見た擬似3次元的な2次元画像データを作成する画像演算プログラムがインストールされており、その画像演算プログラムに従い、上記ディスプレイ装置に表示すべき、設定された視点位置に対応した立体オブジェクトの擬似3次元的な2次元画像の画像信号を発生させる画像演算装置(201a)と、
上記画像演算装置から得られた画像信号をディスプレイ装置への入力用ビデオ信号に変換し、ディスプレイ装置に供給する画像信号変換回路(206)と、
を備えた、視点位置に対応した立体オブジェクトの擬似3次元的な2次元画像を表示する装置において、
下記(e)項ないし(i)項に記載の構成要素を具備することを特徴とする上記の2次元画像表示装置。
(e)被写体となる観者の存在すべき基準位置へ向けられた第1カメラ(A)と、第1カメラの光軸(OA)上において第1カメラから距離DAの位置に第1カメラの光軸に対し45°傾斜して設けられ、被写体からの光線を第1カメラへ透過させるハーフミラー(M)と、上記第1カメラと同一の光学特性を有し、上記ハーフミラーで反射された被写体からの光線を受光するよう第1カメラの光軸(OA)と直交する光軸(OB)上においてハーフミラーから前記距離DAとは異なる値の距離DBの位置に設けられた第2カメラ(B)と、を備え、撮影を指令する作動信号を受けたとき、上記第1及び第2カメラにより被写体を同時に撮影する複合カメラ装置(1)。
(f)予めインストールされた画像サイズ調整プログラムを実行し、上記第1カメラにより撮影した画像サイズに、被写体から第1カメラまでの距離(D+DA:ここでDは、被写体からハーフミラーまでの距離)と被写体から第2カメラまでの距離(D+DB)との比率Kを乗じることにより、第1カメラにより撮影した画像サイズと第2カメラにより撮影した画像サイズを同一サイズとする同一サイズ化演算回路(201b)。
(g)予めインストールされた画像ズレ検知プログラムを実行し、画像サイズが同一化された上記第1及び第2カメラによる撮影画像のズレδを検知するズレ検知回路(201c)。
(h)予めインストールされた視点位置算出プログラムを実行し、上記ズレδに基づき、観者の視点位置の前記基準位置からの移動量を算出し、当該移動量に基づき上記撮影時の観者の視点位置データを出力する視点位置算出回路(201d)。
(i)予めインストールされた作動制御プログラムを実行し、上記複合カメラ装置(1)、同一サイズ化演算回路(201b)、ズレ検知回路(201c)及び視点位置算出回路(201d)を所定の短時間間隔で順次繰り返し作動させ、そのつど得られた観者の視点位置データを上記画像演算装置(201a)に入力させて、各視点位置に対応した立体オブジェクトの2次元画像を上記ディスプレイ装置に順次表示せしめる作動制御回路(201e)。
【図1】


【図2】
【図3】

【図4】

【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2009−122895(P2009−122895A)
【公開日】平成21年6月4日(2009.6.4)
【国際特許分類】
【出願番号】特願2007−295189(P2007−295189)
【出願日】平成19年11月14日(2007.11.14)
【出願人】(306019111)株式会社タイトー (475)
【Fターム(参考)】
【公開日】平成21年6月4日(2009.6.4)
【国際特許分類】
【出願日】平成19年11月14日(2007.11.14)
【出願人】(306019111)株式会社タイトー (475)
【Fターム(参考)】
[ Back to top ]