
角度検出装置、モータ駆動装置及び画像形成装置
【課題】コスト増加を伴わずにモータの回転角を安定的かつ高精度で検出することができる角度検出装置を提供する。
【解決手段】角度検出装置は、モータの回転子の回転角度に応じて正弦波状に変化する正弦波信号であって、互いの配置位置により位相の異なる正弦波信号を出力する複数のセンサ(15)と、少なくとも2つの前記正弦波信号同士を相互演算した結果により表されるベクトルを生成するベクトル生成手段(30)と、前記ベクトルと複数の位相を有する基準正弦波とを演算することにより、前記ベクトルを回転させるベクトル回転手段(40)と、前記ベクトル回転手段を用いて、前記ベクトルが所定位相になるまで前記ベクトルを順次回転させ、回転前の前記ベクトルと当該所定位相のなす角度をモータの回転子の回転角度として検出する角度探索手段(50)とを備える。
【解決手段】角度検出装置は、モータの回転子の回転角度に応じて正弦波状に変化する正弦波信号であって、互いの配置位置により位相の異なる正弦波信号を出力する複数のセンサ(15)と、少なくとも2つの前記正弦波信号同士を相互演算した結果により表されるベクトルを生成するベクトル生成手段(30)と、前記ベクトルと複数の位相を有する基準正弦波とを演算することにより、前記ベクトルを回転させるベクトル回転手段(40)と、前記ベクトル回転手段を用いて、前記ベクトルが所定位相になるまで前記ベクトルを順次回転させ、回転前の前記ベクトルと当該所定位相のなす角度をモータの回転子の回転角度として検出する角度探索手段(50)とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、モータの回転子などの回転角度を検出する角度検出装置、それを備えるモータを回転駆動するモータ駆動装置及び画像形成装置に関する。
【背景技術】
【0002】
例えばモータを回転位置制御する場合、回転子の回転角度を検出する必要がある。モータの回転子の回転角度は、一般に、モータの回転子の回転軸にロータリーエンコーダを接続して検出することができる。この場合、ロータリエンコーダから、モータの回転子の回転角度に応じて変化する1/4周期の位相差を有する2相のパルス信号を得、当該2相のパルス信号のエッジ検出結果と2相のHigh/Low状態から、相対的なモータの回転子の回転角度を検出することができる。
【0003】
上記ロータリエンコーダとしての光学式エンコーダは、外周部に光学窓となるスリットを等間隔に設けた円盤と、円盤のスリットピッチの1/4間隔で配置された2個のフォトインタラプタにより構成される。そして2個のフォトインタラプタの出力信号を2値化することにより、2相のパルス信号を得ることができる。
【0004】
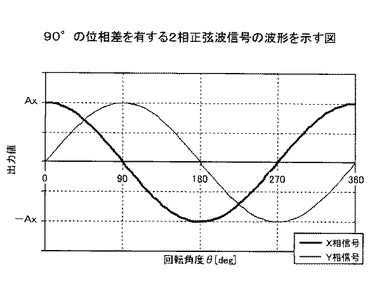
また、特許文献1に記載の発明では、モータの回転子の回転角度に応じて正弦波状に変化する信号を出力する磁気センサを90°の位相差を持って2つ配置している。ここでモータの回転子の回転角度をθ、得られる2相の磁気センサ信号出力のX相信号をVx、Y相信号をVyとする。その場合Vx、Vyは、それぞれ振幅Axを有する回転角度θについての余弦関数、振幅Ayを有する回転角度θについての正弦関数で表わすことができる。これら余弦関数及び正弦関数は、例えば図19及び、90°の位相差を有する2相正弦波信号を示す「数1」の式に示される。なお、磁気センサ信号出力の振幅Ax、Ayの差によって誤差が生じるが、ここではこれらは事前に調整されており、Ax=Ayとする。
【0005】
【数1】

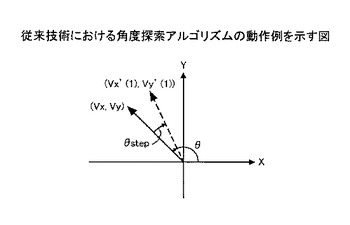
ここで、磁気センサ出力信号の値Vx、Vyを検出すると、図20に示すように、検出したVx、VyがXY平面上に形成するベクトルとX軸との角度が、モータの回転子の回転角度θに相当する。そこで、角度探索アルゴリズムを示す「数2」の式に従う回転変換により、図20に示すように、所定のステップ角θstepずつ負の回転方向へ繰り返し回転させ、回転したベクトルのY成分Vy'(n)が、正から負へ変化するまで繰り返す。このようにして得られるベクトルの総回転角度θnが、モータの回転子の回転角度の検出角度になる。以上の動作を周期的に実行することにより、モータの回転子の回転角度を検出することができる。
【0006】
【数2】
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、上記した光学式エンコーダは、スリット円盤とフォトインタラプタという部品が必要であり、さらにそれらの組み付けも必要になるため、これらがコスト増加の原因となる。
【0008】
また、上述した特許文献1に記載の方式においても、例えば、ブラシレスモータは転流タイミング検知用に所定の位相差を持って配置された複数のホール素子を備えている。しかし、最も一般的な3相ブラシレスモータにおける転流用のホール素子は、出力信号が互いに120°の位相差を有するように配置されている。これに対し上述のようにしてモータの回転子の回転角度の検出を行うためには、90°の位相差を有する信号を出力するホール素子を追加しなければならない。従ってコイル、回転子、120°の位相差を有するホール素子が一体に組み付けられている汎用のモータユニットを使用することはできず、やはりコスト増加の原因となる。
【0009】
そこで本発明は、部品の追加等によるコスト増加を伴わずにモータの回転子の位置を安定的かつ高精度で検出することができる角度検出装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
本発明に従う角度検出装置は、モータの回転子の回転角度に応じて正弦波状に変化する正弦波信号であって、互いの配置位置により位相の異なる正弦波信号を出力する複数のセンサと、少なくとも2つの前記正弦波信号同士を相互演算した結果により表されるベクトルを生成するベクトル生成手段と、前記ベクトルと複数の位相を有する基準正弦波とを演算することにより前記ベクトルを回転させるベクトル回転手段と、前記ベクトル回転手段を用いて前記ベクトルが所定位相になるまで前記ベクトルを順次回転させ、回転前の前記ベクトルと当該所定位相とがなす角度をモータの回転子の回転角度として検出する角度探索手段とを備えることを特徴とする。
【発明の効果】
【0011】
本発明に従う角度検出装置により、高価な光学エンコーダなどを付加せずに回転子の位置を安定的かつ高精度で検出することができ、さらにセンサ出力の正弦波の位相差が90°以外の場合でもモータの回転子の位置を検出することができる。
【図面の簡単な説明】
【0012】
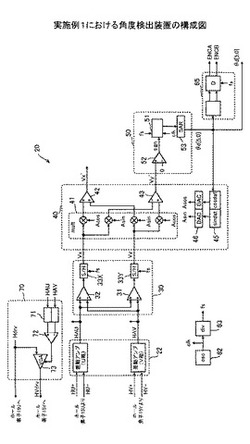
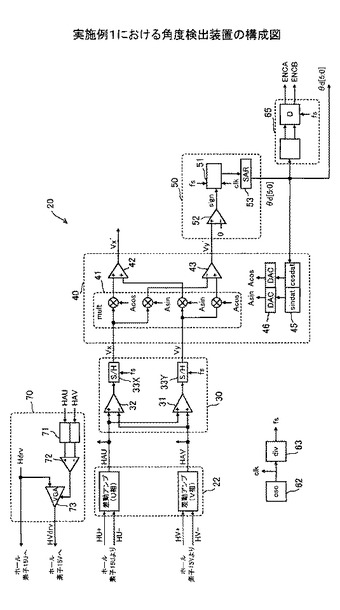
【図1】実施例1における角度検出装置の構成図である。
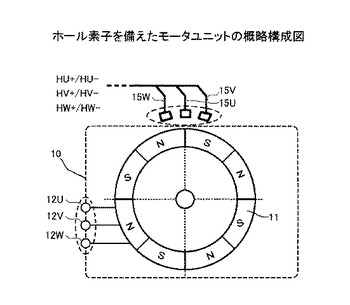
【図2】ホール素子を備えたモータユニットの概略構成図である。
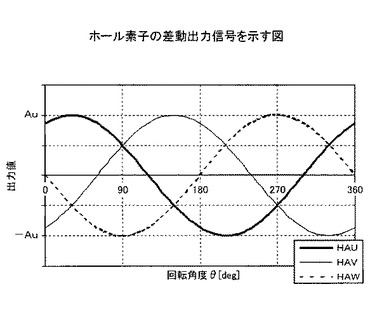
【図3】ホール素子の差動出力信号を示す図である。
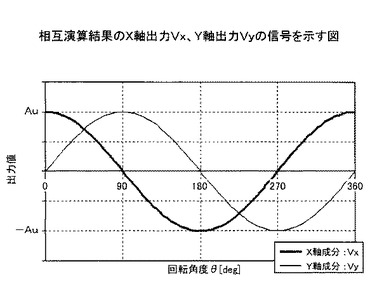
【図4】相互演算結果のX軸出力Vx、Y軸出力Vyの信号を示す図である。
【図5】実施例1におけるUVW軸からXY軸への変換を示す図である。
【図6】実施例1におけるメモリに格納される正弦データと余弦データを示す図である。
【図7】実施例1における角度探索シーケンスのタイミングチャートを示す図である。
【図8a】実施例1における角度探索シーケンスの動作(カウントn=1)を示す図である。
【図8b】実施例1における角度探索シーケンスの動作(カウントn=2)を示す図である。
【図8c】実施例1における角度探索シーケンスの動作(カウントn=3)を示す図である。
【図8d】実施例1における角度探索シーケンスの動作(カウントn=4)を示す図である。
【図9】2相のパルス信号の生成論理を示す図である。
【図10】実施例2における差動アンプ及びベクトル生成部の構成図である。
【図11】実施例2におけるUVW軸からXY軸への変換を示す図である。
【図12】実施例3におけるモータ駆動装置の全体構成図である。
【図13】ホール信号を生成する条件を示す図である。
【図14】駆動転流回路の上側アームの構成図である。
【図15】変調部の動作を示す図である。
【図16】ホール信号と矩形波駆動の相論理を示す図である。
【図17】相論理とゲート信号の関係を示す図である。
【図18】本発明を適用した画像形成装置の一例を示す断面構成図である。
【図19】90°の位相差を有する2相正弦波信号の波形を示す図である。
【図20】従来技術における角度探索アルゴリズムの動作例を示す図である。
【図21】従来技術におけるモータ駆動装置の全体構成を示す図である。
【発明を実施するための形態】
【0013】
以下では、本発明の実施例1における装置構成について図面を用いて説明する。
【0014】
先ず、図2に示すように、ブラシレスモータ10は、互いに120°の位相差を持ち、Y字結線されたU相、V相、W相の3相で構成されるそれぞれのコイル13U,13V,13W(図2においては省略、図12参照)を有する。ブラシレスモータ10は更に、コイル13U,13V,13Wと対向する位置に配置され、S極、N極が交互に並んだ永久磁石を有する回転子11を有する。ブラシレスモータ10は、コイル端子12U,12V,13Wからそれぞれコイル13U,13V,13Wへ、回転角度に応じて適切に転流された電流(駆動電流)が供給されて回転駆動される(詳細については図12乃至17と共に後述する)。なお、本実施例における回転子11の永久磁石は図2に示されるように8極(極ペア数は4)とする。
【0015】
また図示のように、3個のホール素子15U、15V、15Wが、回転子11の近傍に固定して配置されており、回転子11の回転角度位置を検出する。それぞれのホール素子15U、15V、15Wは、ゲルマニウムやInSbのホール効果を利用して、回転子11の磁界の変化に応じて変化するU相、V相、W相の差動信号HU+/HU−、HV+/HV−、HW+/HW−を出力する。差動信号HU+/HU−、HV+/HV−、HW+/HW−をシングルエンド化することによってアナログホール信号HAU、HAV、HAWを得る。シングルエンド化とは、差動信号をシングルエンド信号に変換することを言う。これらアナログホール信号HAU,HAV,HAWは図3に示すように回転子11の回転に応じて正弦波状に変化する。これらアナログホール信号HAU,HAV,HAWが互いに120°の位相差を有する波形になるように、ホール素子15U,15V,15Wは配置されている。なお、図3では仮に3相の振幅を等しく示している。
【0016】
このとき、本実施例における回転子11の磁極数は8であるため、図3に示す各正弦波は、回転子11の1回転当たり4周期含まれる。逆に言えば回転子11の1/4回転が図3に示す各正弦波の1周期に相当する。以下では説明の便宜上、ブラシレスモータ10の回転子11の回転角度(θ)を、アナログホール信号HAU,HAV,HAWの正弦波の1周期を360°として示す。従って、実際のブラシレスモータ10の回転子11の回転角度は、このようにしてアナログホール信号HAU,HAV,HAWの正弦波の1周期を360°として示された値(θ)に対し、その1/4の値となる。例えばこのようにしてアナログホール信号HAU,HAV,HAWの正弦波の1周期を360°として示された回転角度の値(θ)が360°であった場合、実際のブラシレスモータ10の回転子11の回転角度はその1/4の90°ということになる。
【0017】
なお、ホール素子15U、15V,15Wを駆動するためには、前記差動信号の出力方向及び検出する磁束の方向に対して垂直に電圧を掛ける必要があるが、図2における図示は省略する。
【0018】
なお、ホール素子15U、15V,15Wは、回転子の回転角度に応じて正弦波状に変化する正弦波信号であって、互いの配置位置により位相の異なる正弦波信号を出力する複数のセンサに相当する。
【0019】
次に、図1を用いて本実施例における角度検出装置20の構成を説明する。
【0020】
角度検出装置20は大略、差動アンプ22,ベクトル生成部30,ベクトル回転部40,角度探索制御部50,2相パルス生成部65,ホール駆動部70、発振器62及び分周器63を有する。
【0021】
発振器62は、周期的なパルス信号であるクロック信号clkを出力する。分周器63は、クロック信号clkを分周してトリガfsを出力する。このとき、分周比は後述する角度探索のシーケンスに対して矛盾の無いように、後述する検出角度データθdの語長よりも大きくする必要がある。
【0022】
ブラシレスモータ10のホール素子15U、15V、15Wからの差動信号を入力された差動アンプ22は、U相の差動信号HU+/HU−、V相の差動信号HV+/HV−をシングルエンド化して、それぞれアナログホール信号HAU、HAVとして出力する。このとき、アナログホール信号HAU、HAVの波形は、3相ホール素子の差動出力波形を示す「数3」の式のように示される。すなわち、上記の如くアナログホール信号HAU,HAV,HAWの正弦波の1周期を360°として示された回転子11の回転角度θ(以下単に「回転角度θ」と称する)に対し、位相が異なる2つの正弦関数で表わされる。ここで、HAU、HAVの振幅をそれぞれAu、Avとする。
【0023】
【数3】
次に、ベクトル生成部30の構成及び動作を説明する。
【0024】
差動アンプ22に接続したベクトル生成手段としてのベクトル生成部30は、減算アンプ32によりアナログホール信号HAU、HAVに対し「数4」の上式の左辺に示す減算を実行し、さらに減算結果にゲイン(1/√3)を乗じた演算結果を得る。そして得られた演算結果を、S/H部33Xにより、前記トリガfsのタイミングでサンプルホールドしてX軸成分Vxとして出力する。同様に、ベクトル生成部30は、加算アンプ31によりアナログホール信号HAU、HAVに対し「数4」の下式の左辺に示す加算を実行した演算結果を得る。そして得られた演算結果を、S/H部33Yにより、前記トリガfsのタイミングでサンプルホールドしてY軸出力Vyとして出力する。
【0025】
これによりX軸出力Vx、Y軸出力Vyは、「数4」の各式の右辺及び図4に示すように、90°の位相差を持って回転角度θに対して正弦波状に変化する。ただし、前記アナログホール信号HAU、HAVの振幅Au、Avは、後述するホール駆動部70の振幅調整により互いに等しくされている。
【0026】
【数4】
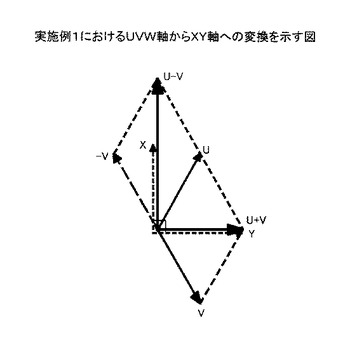
ここで、図5を用いて「数4」の各式が示す演算の意味を説明する。
【0027】
直交するXY平面上に、Y軸に対して+60°の方向にU軸を、−60°の方向にV軸をとる。U軸、V軸上の長さ1の単位ベクトルU、Vを考えれば、ベクトル(U+V)はY軸上の単位ベクトルYになり、ベクトル(U−V)はX軸上の長さ√3のベクトルになる。つまり、HAU、HAVの相互演算を示す式である「数4」は、120°の角をなすUV軸からXY軸座標系への座標変換を示しており、変換後の長さを等しくするために(HAU−HAV)には1/√3を乗じている。
【0028】
なお、X軸成分Vx、Y軸成分Vyにより表されるベクトルは、「正弦波信号同士を相互演算した結果により表されるベクトル」である。すなわち図4から明らかなように、X軸成分Vx、Y軸成分Vyにより表されるベクトルは、「数4」の各式の右辺、すなわちAu*cos(θ)及びAu*sin(θ)により表されるベクトルである。また、「数4」の各式の左辺に示されるように、これらAu*cos(θ)及びAu*sin(θ)は、HAU及びHAVの加減算等(相互演算)によって求まり、「数3」に示されるように、HAU及びHAVはそれぞれ正弦波信号だからである。
【0029】
次に、ベクトル回転部40の構成及び動作を説明する。
【0030】
ベクトル生成部30に接続したベクトル回転手段としてのベクトル回転部40は、X軸成分Vx、Y軸成分Vyにより表されるベクトルを、後述する検出角度データθdの値に従って回転変換して、それぞれ回転X軸成分Vx'、回転Y軸成分Vy'として出力する。
【0031】
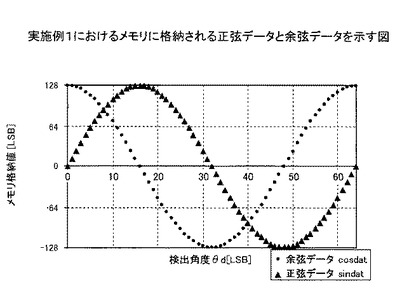
メモリ45は、不揮発メモリであり、図6に示すように、それぞれ1周期を64分割して、振幅を128[LSB]で表す正弦データsindat及び余弦データcosdatを保持する。そして、後述する6ビットの語長を有する検出角度データθdの値に従って、それぞれの対応するデータ値を出力する。
【0032】
DAC(デジタル−アナログコンバータ)46は、メモリ45の出力したデータ値sindat、cosdatを値に比例したアナログ値に変化して、アナログ正弦値Asin、アナログ余弦値Acosとして出力する。このとき、出力値にはオフセットを与えてもよい。
【0033】
乗算器41は、アナログ乗算器であり、X軸成分Vx又はY軸成分Vyと、アナログ正弦値Asin又はアナログ余弦値Acosとを組み合わせて乗じた4つの乗算結果を出力する。
【0034】
加算アンプ42は、乗算器41の乗算結果から所定の2つを加算して、回転X軸成分Vx'として出力する。なお、このときVx'にゲインを乗じる構成としてもよい。
【0035】
減算アンプ43は、乗算器41の乗算結果から所定の2つの一方から他方を減算して、回転Y軸成分Vy'として出力する。なお、このときVy'にゲインを乗じる構成としてもよい。
【0036】
次に、ベクトル回転部40の演算について詳細に説明する。
【0037】
回転X軸成分Vx'は、X軸成分Vxとアナログ余弦値Acosの乗算結果と、Y軸成分Vyとアナログ正弦値Asinの乗算結果を加算した値である。すなわちVx'=Acos・Vx+Asin・Vyの演算がなされる。回転Y軸成分Vy'は、X軸成分Vxとアナログ正弦値Asinの乗算結果を、Y軸成分Vyとアナログ余弦値Acosの乗算結果から減算した値である。すなわちVy'=−Asin・Vx+Acos・Vyの演算がなされる。
【0038】
ここで、「数5」に示す式による演算は、ベクトル(Vx、Vy)をベクトル(Vx'、Vy')へ時計周り方向へθだけ回転させる1次変換を意味する。「数5」によれば、Vx',Vy'はそれぞれ、Vx'=cosθ・Vx+sinθ・Vy、Vy'=−sinθ・Vx+cosθ・Vyとして得られる。「数5」の式による演算と同様に、前述のベクトル回転部40の演算は、X軸成分Vx、Y軸成分Vyの表すベクトルを検出角度データθdの値だけ時計回りに回転させることに相当する。
【0039】
【数5】
なお、本実施例においては乗算器41を4つ並べる構成としているが、1つの乗算器を時系列で交互に使い回すように構成してもよい。また、乗算器はアナログ乗算器を用いているが、全ての乗算器をデジタル回路で実現したデジタル乗算器を用いてもよい。この場合、デジタル回路の構成に合わせて信号のアナログ/デジタルの変換が必要となる。
【0040】
なお、本実施例におけるアナログ正弦値Asin及びアナログ余弦値Acosは、複数の位相を有する基準正弦波に相当する。
【0041】
次に、角度探索手段としての角度探索制御部50の構成及び動作を説明する。
【0042】
角度探索制御部50は、出力する検出角度データθdを変化させて、回転Y軸成分Vy'が近似的に0になる検出角度を探索する処理をトリガfsの到来の度に実行する。
【0043】
符号判定部52は、回転Y軸成分Vy'の値の正負を判定して、符号判定結果signを出力する。なお、図1においては0を基準に示しているが、所定のオフセット値に対する大小により符号を判定するように構成してもよい。
【0044】
SAR53は、逐次近似レジスタであり、後述するシーケンサ51により値を適宜書き換えられ、その値を検出角度データθdとして出力する。本実施例においては、データ語長は6ビットとする。
【0045】
シーケンサ51は、SAR53の値を書き換え、その結果として変化する符合判定結果signの値によりSAR53の値を確定させるという角度探索シーケンスを、トリガfsの到来の度に実行する。
【0046】
以下では、シーケンサ51の動作を図7、図8a〜図8dを用いて詳細に説明する。
【0047】
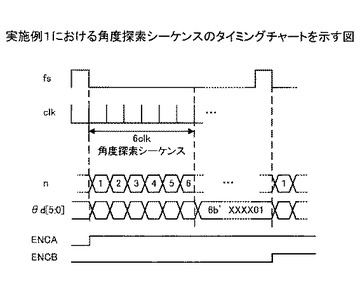
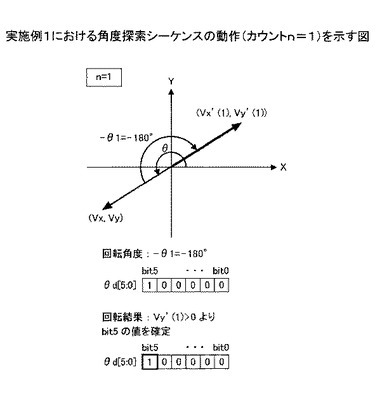
先ず、分周器63からのトリガfsがシーケンサ51に到来すると、図7に示すようにカウントn=1として、また図8aに示すようにSAR53の最上位ビットであるbit5の値のみ1として、残りの値は全て0とする。なお、SAR53の値を書き換えることは、検出角度データθdの値を変化させることと同じであり、以下でも同様である。この場合、SAR53の値が、6ビット全てが0の状態から、上記の如く、bit5の値のみが1の状態に変わる。これに応じて検出角度データθdが変わり、このため、ベクトル回転部40によりベクトル(Vx、Vy)が時計回りにθ1=180°だけ回転させられる。このθ1=180°が、上記SAR53の値が6ビット全てが0の状態からbit5の値のみが1の状態へ変化したことに対応するベクトル回転量である。このときの回転X軸成分Vx'、回転Y軸成分Vy'をそれぞれVx'(1)、Vy'(1)とおくと、シーケンサ51は、Vy'(1)の符号を符号判定結果signにより検出する。図8aの例ではVy'(1)の符号は正である。このようにVy'(1)の符号が正ならばSAR53の最上位のビット5を1のまま確定する。
【0048】
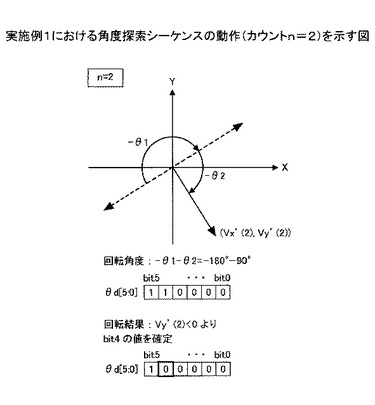
次のクロックclkが到来すると、図7に示すようにカウントn=2として、図8bに示すようにSAR53の最上位から2ビット目であるbit4の値を1に書き換える。bit5の値については、確定した値1のままでよいため書き換えず、その他のビットの値も書き換えない。再び検出角度データθdが変わるため、ベクトル回転部40によりベクトル(Vx、Vy)が時計回りにθ1+θ2=180°+90°だけ回転させられる。このθ1+θ2=180°+90°が、当初のSAR53の値が6ビット全て0の状態から、bit5及びbit4のそれぞれの値が1の状態へ変化したことに対応するベクトル回転量である。ここで、同様に回転結果をVx'(2)、Vy'(2)とおくと、シーケンサ51は、Vy'(2)の符号を符号判定結果signにより検出する。図8bの例では、Vy'(2)の符号は負である。このようにVy'(2)の符号が負ならばSAR53のbit4を0に戻して確定する。
【0049】
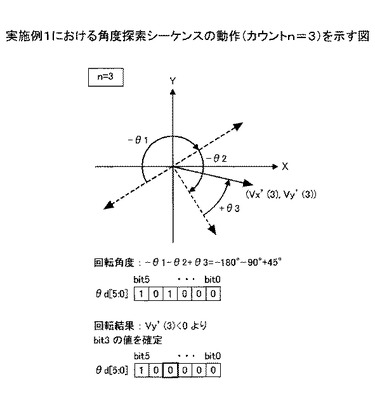
次のクロックclkが到来すると、図7に示すようにカウントn=3として、図8cに示すようにSAR53の最上位から3ビット目であるbit3の値を1に書き換える。その他のビットの値(bit5が1,bit4が0,bit2〜0がそれぞれ0)は書き換えない。再び検出角度データθdが変わるため、ベクトル回転部40によりベクトル(Vx、Vy)が時計回りにθ1+θ2−θ3=180°+90°−45°だけ回転させられる。このθ1+θ2−θ3=180°+90°−45°(=225°)は、θ1+θ3=180°+45°(=225°)と等しく、すなわち、当初のSAR53の値が6ビット全て0の状態から、bit5及びbit3のそれぞれの値が1の状態へ変化したことに対応するベクトル回転量である。ここで、同様に回転結果をVx'(3)、Vy'(3)とおくと、シーケンサ51は、Vy'(3)の符号を符号判定結果signにより検出する。図8cの例では、Vy'(3)の符号は負である。このようにVy'(3)の符号が負ならばSAR53のbit3を0に戻して確定する。
【0050】
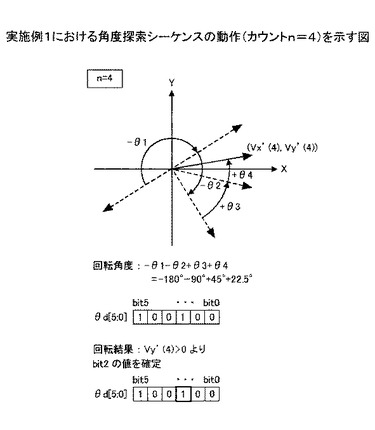
次のクロックclkが到来すると、図7に示すようにカウントn=4として、図8dに示すようにSAR53の最上位から4ビット目であるbit2の値を1に書き換える。その他のビットの値(bit5が1,bit4〜3がそれぞれ0,bit1〜0がそれぞれ0)は書き換えない。再び、検出角度データθdが変わることにより、ベクトル回転部40によりベクトル(Vx、Vy)が時計回りにθ1+θ2−θ3−θ4=180°+90°−45°−22.5°だけ回転する。このθ1+θ2−θ3−θ4=180°+90°−45°−22.5°(=202.5°)は、θ1+θ3=180°+22.5°(=202.5°)と等しく、すなわち、当初のSAR53の値が6ビット全て0の状態から、bit5及びbit2のそれぞれの値が1の状態へ変化したことに対応するベクトル回転量である。ここで、同様に回転結果をVx'(4)、Vy'(4)とおくと、シーケンサ51は、Vy'(4)の符号を符号判定結果signにより検出する。図8dの例では、Vy'(4)の符号は正である。このようにVy'(4)の符号が正ならばSAR53のbit2を1のまま確定する。
【0051】
シーケンサ51は、以上のようなシーケンスを、カウントn=1から6まで、計6ステップ繰り返す。これはSAR53の語長に相当し、全てのbitの値が確定される。
【0052】
以上のシーケンサ51の動作を一般化して説明すると、ベクトル(Vx'(n)、Vy'(n))の回転角度θn(n=1、2、・・・6)を1ステップごとに半分にして、また回転方向としては、回転したベクトルのY軸成分Vy'が正ならば次のステップは時計回り方向へ、負ならば次のステップは反時計回り方向へ、ベクトル(Vx、Vy)を回転させる。
【0053】
最終的にベクトル(Vx'(n)、Vy'(n))がX軸に最も近くまで回転した角度位置が得られる。このようにして、角度探索シーケンスにおける総回転角度が、近似的にベクトル(Vx、Vy)とX軸とのなす角度として検出できる。これは2分法による近似探索アルゴリズムである。
【0054】
以上のようにして、X軸を位相の基準とした、回転子11の回転角度を示す検出角度データθdを検出することができる。ここで図20とともに上述した例では、ベクトルを所定のステップ角ずつ負の回転方向へ繰り返し回転させ、回転したベクトルのY成分が正から負へ変化するまで繰り返すことによって回転子の回転角度を求めていた。これに対し本実施例では、図7乃至図8aとともに上述したように、上記の如く2分法による近似探索アルゴリズムに従い、ステップ毎に回転量を順次半分(1/2)にする。そして回転の結果Y成分の符号が変化する度に回転方向を逆転させることを繰り返してベクトルを徐々にX軸に近づける(例えば図8b乃至図8d中、(Vx'(2)、Vy'(2))→(Vx'(3)、Vy'(3))→(Vx'(4)、Vy'(4)))。その結果上記の如く、最終的にベクトルがX軸に最も近くまで回転した角度位置を得ることができる。そして角度探索シーケンスにおける総回転角度が、回転子11の回転角度を示すベクトルとX軸とのなす角度として検出できるのである。なおこのとき、検出角度データθdに所定のオフセットを加えた値を回転子角度として検出し、X軸以外の所定の位相を基準として回転子11の回転角度を示す検出角度データθdを検出するように構成してもよい。
【0055】
次に、2相パルス生成手段としての2相パルス生成部65の構成及び動作を説明する。
【0056】
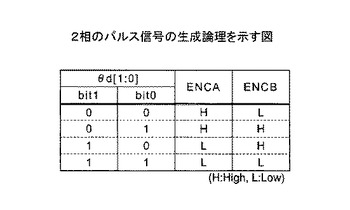
2相パルス生成部65は、図9に示す生成論理に従い、上記検出角度データθdの下位2ビットを参照して、分周器63からのトリガfsの到来の度に出力する2相のパルス信号ENCA、ENCBを更新する(図7の最下段のENCA、ENCB参照)。このようにして、コスト増加の原因となる高価な光学エンコーダなどを備えなくても、1/4周期の位相差を有する2相のパルス信号を得ることができるため、装置を安価に構成することができる。なお、この点につき、図21と共に後述する。
【0057】
次に、ホール駆動部70の構成及び動作を説明する。
【0058】
ホール駆動部70は、U相のホール素子15Uを駆動するための、不図示の電源から供給される所定の電圧又は電流であるホール素子駆動信号Hdrv、及びV相のホール素子15Vを駆動するためのV相ホール素子駆動信号HVdrvを出力する。
【0059】
ここで、V相ホール素子駆動信号HVdrvは、以下のピーク検出部71、比較部72、可変ゲイン部73により生成される。
【0060】
振幅検出手段としてのピーク値検出部71は、前記アナログホール信号HAU、HAVのそれぞれの正弦波形のピーク値を検出し、それぞれのピーク値を出力する。
【0061】
振幅調整手段としての比較部72は、前記U相、V相のピーク値を比較して、U相のピーク値がV相のピーク値より大きい場合は振幅差が正の値となるように、U相のピーク値がV相のピーク値より小さい場合は振幅差が負の値となるように、比較結果を出力する。
【0062】
振幅調整手段としての可変ゲイン部73は、前記ホール素子駆動信号Hdrvにゲインを乗じてV相ホール素子駆動信号HVdrvとして出力する。このとき、比較部72の出力する比較結果が正のときはゲインが大きくなるように、負のときはゲインが小さくなるようにゲインを変化させる。なお、積分器を用いて比較結果を積分し、積分結果に応じてゲインを変化させるように構成してもよい。
【0063】
W相のホール素子15Wを駆動するためのホール素子駆動信号を出力するための構成については説明を省略するが、U相のホール素子15U又はV相のホール素子15Vを駆動するためのホール素子駆動信号を出力するための構成と同様の構成である。
【0064】
ホール駆動部70の上記構成によって、アナログホール信号HAU、HAVの振幅はほぼ等しく調整される。
【0065】
以上が、本実施例1における角度検出装置20の構成及び動作の説明である。
【0066】
本実施例1では、ベクトル生成部30によって、ブラシレスモータ10に備えられているホール素子15U、15V,15Wが出力する、位相差が90°でない正弦波信号から、図5とともに上記した演算により、位相差が90°の正弦波信号を合成する。従って新たにセンサを追加することなく回転子11の回転角度の検出をすることができる。
【0067】
また、角度探索制御部50により、2分法による近似探索アルゴリズムを用いて回転子11の回転角度を探索するため、簡易な構成で、所定のステップ数で安定的に回転子の回転角度を検出することができる。また、2相パルス生成部65を備えているため、モータに高価な光学エンコーダ等を備えていなくても、これと同等の2相のパルス信号を得ることができる。この点につき、図21と共に後述する。
【0068】
また、振幅検出手段としてのピーク値検出部71、振幅調整手段としての比較部72及び可変ゲイン部73を備えているため、高精度に角度検出することができる。
【0069】
また、センサとして安価なホール素子15U,15V,15Wを用いることで、装置を安価に構成することができる。
【0070】
次に、本発明の実施例2における装置構成について図10を用いて説明する。ただし、前記実施例1と共通する説明は適宜省略する。
【0071】
ここで、ブラシレスモータ10、ホール素子15U,15V,15W、発振器62、分周器63、2相パルス生成部65、ベクトル回転部40、角度探索制御部50の構成は実施例1と同様である。ホール駆動部70も実施例1と同様である。従ってW相についてもV相と同様の構成を有する。
【0072】
先ず、差動アンプ25の構成及び動作を説明する。
【0073】
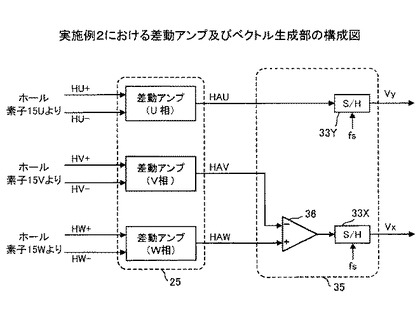
差動アンプ25は、前記U相の差動信号HU+/HU−、前記V相の差動信号HV+/HV−、W相の差動信号HW+/HW−をシングルエンド化して、それぞれアナログホール信号HAU、HAV、HAWとして出力する。このとき、アナログホール信号HAU、HAV、HAWの波形は、「数6」の式に示すような回転子11の回転角度θに対して位相が異なる3つの正弦波の関数で表わされる。この式は3相ホール素子の差動出力波形を示す式である。ここで、HAU、HAV、HAWの振幅をそれぞれAu、Av、Awとする。
【0074】
【数6】
次に、ベクトル生成部35の構成及び動作を説明する。
【0075】
ベクトル生成手段としてのベクトル生成部35は、先ず「数7」の下式に示すように、前記アナログホール信号HAUをそのまま、S/H部33Yにより、トリガfsのタイミングでサンプルホールドして、Y軸成分Vyとして出力する。一方で、ベクトル生成部35は、「数7」の上式の左辺に示すように、減算アンプ36により、前記アナログホール信号HAV、HAWの相互の減算結果にゲイン(1/√3)を乗じた結果を、S/H部33Xにより、トリガfsのタイミングでサンプルホールドして、X軸出力Vxとして出力する。
【0076】
【数7】
この演算により、X軸出力Vx、Y軸出力Vyは、図4に示すように、90°の位相差を持って回転角度θに対して正弦波状に変化する。ただし、前記アナログホール信号HAU、HAV、HAWの振幅Au、Av、Awは、前述のホール駆動部70の振幅調整によりほぼ等しくされる。
【0077】
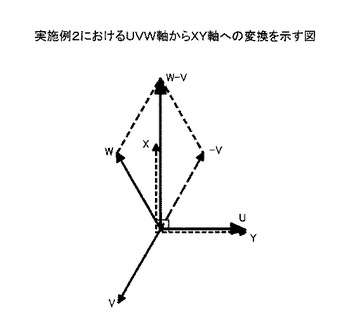
ここで、図11を用いて「数7」の式が示す演算の意味を説明する。
【0078】
直交するXY平面上において、Y軸と同じ方向にU軸を、−120°の方向にV軸を、+120°の方向にW軸をとる。U軸、V軸、W軸上の長さ1の単位ベクトルU、V、Wを考えれば、ベクトルUはY軸上の単位ベクトルになり、ベクトル(W−V)は、X軸上の長さ√3のベクトルになる。つまり、HAU、HAV、HAWの相互演算を示す「数7」の式は、120°の角をなすUVW軸からXY軸座標系への座標変換を示しており、変換後の長さを等しくするために(HAW−HAV)には1/√3を乗じている。
【0079】
なお、Y軸成分VyとX軸成分Vxにより表されるベクトルが、「正弦波信号と、少なくとも2つの正弦波信号同士を相互演算した結果とにより表されるベクトル」である。すなわち図4から明らかなように、X軸成分Vx、Y軸成分Vyにより表されるベクトルは、「数7」の各式の右辺、すなわちAu*cos(θ)及びAu*sin(θ)により表されるベクトルである。また、「数7」の各式の左辺に示されるように、これらのうちAu*cos(θ)はHAW及びHAVの減算等(相互演算)によって求まり、Au*sin(θ)はHAUである。そしてこれらHAU,HAV,HAWは、「数6」に示されるように、それぞれ正弦波信号だからである。
【0080】
以上が本実施例2における角度検出装置の構成及び動作であり、この角度検出装置によれば実施例1と同様の効果が得られる。
【0081】
次に、本発明の実施例3におけるモータ駆動装置500の構成について図12を用いて説明する。ただし、実施例1又は実施例2と共通する部分の説明は適宜省略する。
【0082】
ここで、ブラシレスモータ10、ホール素子15U,15V,15W、角度検出装置20は、実施例1における構成と同様である。
【0083】
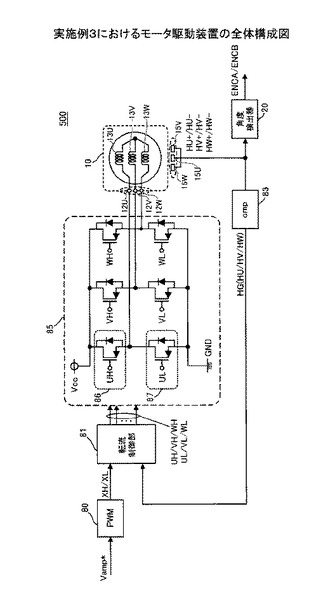
角度検出装置20は上述した実施例1における角度検出装置20であり、回転子11の回転角度の変化に応じて2相のパルス信号ENCA,ENCBを出力する(図1、図9参照)。なお、図12における角度検出装置20は検出角度データθdを出力していないが、検出角度データθdを出力して位置制御や正弦波駆動等に利用するように構成してもよい。
【0084】
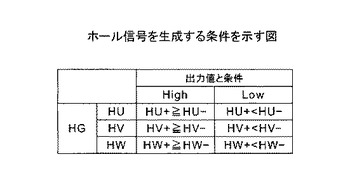
ブラシレスモータ10及び角度検出装置20に接続したホールコンパレータ83は、ホール素子15U、15V、15Wのそれぞれの差動信号HU+/HU−、HV+/HV−、HW+/HW−を、図13に示す論理に従って2値化する比較器であり、2値化した信号をホール信号HG(HU、HV、HW)として出力する。図13中、例えば最上段のHG(HU)は、HU+がHU−以上の場合ハイ(High)レベルの信号を出力し、HU+がHU−未満の場合ロー(Low)レベルの信号を出力する。HG(HV),HG(HW)のそれぞれについても同様である。
【0085】
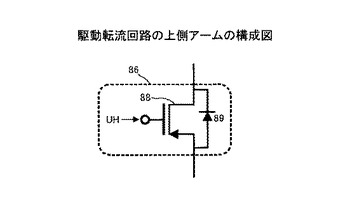
駆動転流回路85は、図12及び図14に示すように、電源Vccに接続されたスイッチング素子88とダイオード89が並列に接続された上側アーム86と、これと同様に構成されて、接地GNDに接続された下側アーム87とが、3相接続されて構成されている。それぞれのスイッチング素子は、ゲート信号(UH、VH、WH、UL、VL、WL)により駆動され、ブラシレスモータ10のコイル13U,13V,13Wにパルス幅変調された電圧を印加して、コイル13U,13V,13Wへ駆動電流を供給し、ブラシレスモータ10を回転駆動する。
【0086】
変調部80は、駆動電圧指令値Vamp*をパルス幅変調(Pulse Wide Modulation:以下「PWM」と呼ぶ)して、所定の論理に基づいてPWM相ゲート信号XH、XLを生成する。
【0087】
以下では、図15を用いて変調部80の動作を説明する。
【0088】
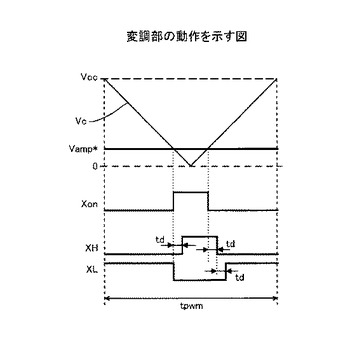
図15の1段目に示す搬送波Vcは、所定のPWM周期の三角波であり、接地GNDから電源電圧Vccまでの振幅を有するとする。変調部80は、非負の値をとる振幅指令値Vamp*と、搬送波Vcの大小を比較して、2段目に示すPWM信号Xonを生成する。
【0089】
次に、変調部80は、図15の3段目、4段目に示すように、PWM信号Xonに対してtdだけ遅れた信号である、上側アームのスイッチング素子88のPWM相ゲート信号XHを生成する。また、変調部80は、PWM信号Xonを反転させ、かつ立ち上がり(Xonでは立ち下がり部分)をtdの2倍だけ遅らせた信号である、下側アームのスイッチング素子のPWM相ゲート信号XLを生成する。なお、tdは、上側アームと下側アームのスイッチング素子の短絡防止を目的に設けられた短絡防止区間(デッドタイム)であり、tpwmはPWM周期(搬送波Vcの周期)の長さである。
【0090】
次に、転流制御部81の構成及び動作を説明する。
【0091】
PWM相ゲート信号XH、XLを入力された転流制御部81は、上記ホール信号HG(HU、HV、HW)のHigh/Lowの論理に基づいて、U相、V相、W相のそれぞれに適切なゲート信号を選択して出力する。
【0092】
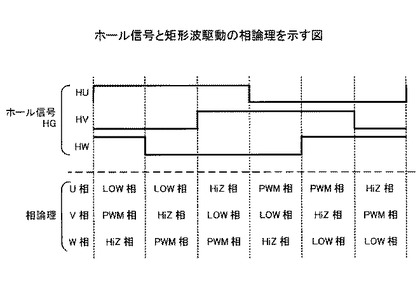
先ず、矩形波駆動でモータを回転駆動するためには、転流制御部81は、図16に示すようにホール信号HGの状態に従って、U相、V相、W相をPWM相、LOW相、HiZ相のいずれかの相状態に割り振る。そして、相状態毎に以下に示すゲート信号を出力する。
【0093】
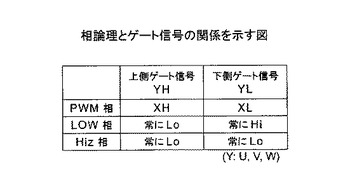
すなわち、図17に示すように、転流制御部81は、PWM相の場合、上側アームのゲート信号YHとしてXHを選択し、下側アームのゲート信号YLとしてXLを選択する。LOW相の場合、上側アームのゲート信号YHは常にLo(ロー、Low)とし、下側アームのゲート信号YLは常にHi(ハイ、High)に設定する。HiZ相の場合は、上側アームのゲート信号YHも下側アームのゲート信号YLも、常にLo(ロー、Low)に設定する。なお駆動転流回路85に含まれる各スイッチング素子は、印加されるゲート信号がHiの場合導通し、Loの場合遮断される。又ゲート信号YH,YLは、それぞれ、U相の場合上記ゲート信号UH,UL,V相の場合上記ゲート信号VH,VL,W相の場合上記ゲート信号WH,WLをそれぞれ意味する(図12参照)。
【0094】
これらの選択は、前記PWM周期の先頭において3相とも同時に更新される。回転方向を逆転する場合は、図16においてPWM相とLOW相を入れ替えて選択すればよい。以下に駆動転流回路85による転流動作の一例について説明を行う。
【0095】
例えば図16中、最初のPWM周期の相論理はU相がLOW相、V相がPWM相、W相がHiz相である。この場合、図17の関係に従い、U相では上側アーム86のスイッチング素子88が遮断されて下側アーム87のスイッチング素子が導通する。又V相では図15のXH,XLに従い、上側アーム86のスイッチング素子88が一定期間導通し、下側アーム87のスイッチング素子は当該上側アームの一定期間の導通期間を含む一定期間遮断される。W相では上側アーム86、下側アーム87の双方のスイッチング素子が遮断される。その結果この場合、上記一定期間の導通期間の間、V相の上側アーム86及びU相の下側アーム87のそれぞれのスイッチング素子を介し、V相のコイル13VからU相のコイル13Uへ駆動電流が流れる。その結果、各コイル13V,13Uに流れる駆動電流と図2に示す回転子11の永久磁石による磁界との関係で回転駆動力が生じ、回転子11が駆動される。
【0096】
図16中、次(2番目)のPWM周期の相論理は、U相がLOW相、V相がHiz相、W相がPWM相である。この場合上記同様の転流動作により、W相の上側アーム86の一定期間の導通期間の間、当該上側アーム86及びU相の下側アーム87のそれぞれのスイッチング素子を介し、W相のコイル13WからU相のコイル13Uへ駆動電流が流れる。その結果、各コイル13W,13Uに流れる駆動電流と図2に示す回転子11の永久磁石による磁界との関係で回転駆動力が生じ、回転子11が駆動される。
【0097】
図16中、更に次(3番目)のPWM周期の相論理は、U相がHiz相、V相がLOW相、W相がPWM相である。この場合上記同様の転流動作により、W相の上側のアーム86の一定期間の導通期間の間、当該上側アーム86及びV相の下側アーム87のそれぞれのスイッチング素子を介し、W相のコイル13WからV相のコイル13Vへ駆動電流が流れる。その結果、各コイル13W,13Vに流れる駆動電流と図2に示す回転子11の永久磁石による磁界との関係で回転駆動力が生じ、回転子11が駆動される。
【0098】
以降、図16中、4番目のPWM周期ではU相の上側アームの一定期間の導通期間の間、当該上側アーム86及びV相の下側アーム87のそれぞれのスイッチング素子を介し、U相のコイル13UからV相のコイル13Vへ駆動電流が流れる。5番目のPWM周期ではU相の上側アームの一定期間の導通期間の間、当該上側アーム86及びW相の下側アーム87のそれぞれのスイッチング素子を介し、U相のコイル13UからW相のコイル13Wへ駆動電流が流れる。6番目のPWM周期ではV相の上側アームの一定期間の導通期間の間、当該上側アーム86及びW相の下側アーム87のそれぞれのスイッチング素子を介し、V相のコイル13VからW相のコイル13Wへ駆動電流が流れる。以降、上述した、図16に示す一連のPWM周期(6周期)のパターンが繰り返され、駆動転流回路85の転流動作によってコイル13U,13V,13Wのそれぞれに適宜流される駆動電流により、回転子11が連続して回転駆動される。
【0099】
以上が、本実施例3におけるモータ駆動装置500の構成及び動作である。
【0100】
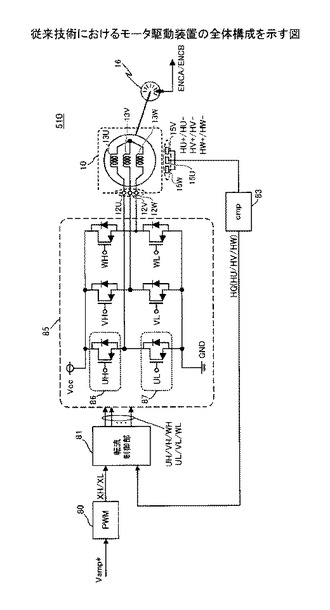
ここで、実施例3のモータ駆動装置500の効果を説明するため、比較の目的で、図21を用いて従来のモータ駆動装置510の構成を説明する。なお、実施例3のモータ駆動装置500と共通する部分の説明は省略する。
【0101】
図21の構成において、ブラシレスモータ10、ホール素子15U,15V,15W、変調器80、転流制御部81、ホールコンパレータ83及び駆動転流回路85は、図12に示される、実施例3のモータ駆動装置500におけるものとそれぞれ同様である。
【0102】
図21中、エンコーダ16は光学式エンコーダであり、ブラシレスモータ10の回転軸に接続された、外周部に光学窓となるスリットを等間隔に設けた円盤と、円盤のスリットピッチの1/4間隔で配置された2個のフォトインタラプタを有する。当該エンコーダ16は、上記2個のフォトインタラプタの出力信号を2値化することにより、ブラシレスモータ10の回転に応じて変化する、2相のパルス信号ENCA、ENCBを出力する。なお、図12に示される、実施例3のモータ駆動装置500に含まれる角度検出器20が出力する2相のパルス信号は、上記エンコーダ16が出力する2相のパルス信号と等価である。
【0103】
以上が、従来のモータ駆動装置510の構成である。
【0104】
このように、図12に示される実施例3のモータ駆動装置500では、ブラシレスモータ10の転流駆動のために必ず備えられているホール素子15U,15V,15Wの出力信号を以下に述べる用途に利用する。すなわち、図21の従来例と同様にホールコンパレータ83,転流制御部81,駆動転流回路85及び変調器80による転流タイミングの検出に利用するだけではなく、角度検出器20による回転角度の検出にも利用する。その結果、図21に示されるエンコーダ16等の如くの別個のセンサの追加が不要となり、転流タイミングの検出のための構成とは別に角度検出のための構成を備えるモータ駆動装置を安価に構成することができる。ここで「転流タイミングの検出のための構成」とは、例えば図12の実施例3の場合、上記ホールコンパレータ83,転流制御部81,駆動転流回路85及び変調器80を含む構成であり、「角度検出のための構成」とは例えば上記角度検出装置20を含む構成である。
【0105】
最後に、本発明のモータ駆動装置500を適用可能な画像形成装置の一例について説明する。
【0106】
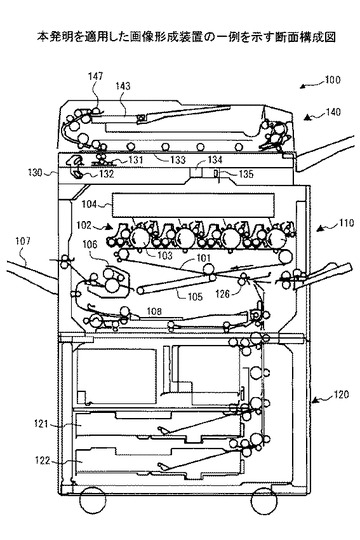
図18に示す画像形成装置100は、いわゆるタンデム型のフルカラー装置であり、画像読み取り部を備えて複写装置として構成されたものである。本例の複写装置は、給紙テーブル120の上に装置本体110を搭載し、装置本体110の最上部にはスキャナ130が配置され、さらにその上に自動原稿送り装置(ADF)140を設けてある。
【0107】
スキャナ130の内部には、照明用光源とミラーから構成された第一走行体131と、ミラーを含む第二走行体132とがコンタクトガラス133に平行に移動可能に設けられている。第二走行体132は、第一走行体131の1/2の速度で移動する公知の光学系を採用しており、これらの走行体131,132が移動しながらコンタクトガラス132上に停止された原稿画像を走査する。光源で照明された原稿からの反射光は、集光レンズ134で結像され、CCD等の固体撮像素子135に取り込まれる。そのデータは複写装置本体110の画像処理部(図示を省略)にて処理される。
【0108】
複写装置本体110のほぼ中央には、中間転写ベルト101が配設されている。この中間転写ベルト101の上辺に沿って4つの作像ユニット102が並べて配置されている。各作像ユニット102においては、感光体ドラム103の周囲に電子写真プロセスに必要な各機器が配置されている。
【0109】
中間転写ベルト101は、複数の支持ローラに張架されて図中時計回りに回転可能に設けられている。中間転写ベルト101の内側で、各作像ユニットの感光体ドラム103に対向する位置には、一次転写手段である転写ローラが配置されている。
【0110】
上記各作像ユニット102の上方には露光装置104が配設されている。露光装置104からの書き込み光は、各作像ユニット102の感光体ドラム103にそれぞれ照射される。
【0111】
中間転写ベルト101の下方には転写搬送ベルト105が配置されている。転写搬送ベルト105を支持する一方のローラが二次転写ローラとして機能し、中間転写ベルト101上の画像を記録媒体(転写紙等)に二次転写する。
【0112】
転写搬送ベルト105の左方には定着装置106が設けられている。定着装置106の左方の装置側面には排紙トレイ107が設けられている。また、装置本体110の最下部には、シート反転部108が設けられている。そして、給紙テーブル120には、2段の給紙カセット121,122が備えられている。
【0113】
さて、本例のカラー複写装置を用いてコピーをとるときは、ユーザはADF140の原稿テーブル又はスキャナのコンタクトガラス133上に原稿をセットする。そして、図示しない操作パネル上に設けられたスタートスイッチを押すと、スキャナ130が駆動され、光源からの反射光をミラーで反射することにより集光レンズ134を通して読取りセンサ(画像撮像素子135)に入射させて原稿情報を読み取る。
【0114】
また、同じく操作パネル上に設けられたスタートスイッチを押すと、図示しない駆動モータで中間転写ベルト101が回転駆動される。同時に、個々の作像ユニット102において感光体103が回転され、各感光体103上にそれぞれ、ブラック,イエロー,マゼンタ,シアンの単色画像が形成される。そして、それらの単色画像が中間転写ベルト101上に順次転写されて合成カラー画像が形成される。
【0115】
ここで上記中間転写ベルト101を回転駆動する図示しない駆動モータとして、図12と共に上述した実施例3のモータ駆動装置500によって駆動されるブラシレスモータ10を適用することができる。そして当該駆動モータとしてのブラシレスモータ10を駆動するモータ駆動装置として、上記実施例3のモータ駆動装置500を適用することができる。その場合、図18においては図示が省略されているが、実施例3のモータ駆動装置500が画像形成装置100に含まれる。
【0116】
また、スタートスイッチが押されると、給紙テーブル120から用紙が繰り出され、レジストローラ126に突き当てられて一時停止される。
【0117】
そして、中間転写ベルト101上の合成カラー画像にタイミングを合わせてレジストローラ126が回転され、中間転写ベルト101と転写搬送ベルト105との間に用紙が送り込まれ、二次転写部で画像が転写されて用紙上にカラー画像が記録される。画像転写後の用紙は定着装置106に送られ、トナー像が定着されて排紙トレイ107に排出される。
【0118】
以上、本発明を図示の実施例により説明したが、本発明はこれに限定されるものではない。例えば、モータはアウタ・ロータ型に限らず、インナ・ロータ型も可能である。コイルの結線パターンもY字結線(スター結線)に限らずデルタ結線も可能である。モータ回転子の極数も8極に限らない。
【0119】
本発明のモータ駆動装置は家電製品、OA機器等に好適に適用可能であるが、OA機器としては上述した画像形成装置の他にも画像読取装置等に適用することができる。
【0120】
また、画像形成装置においては、作像部の構成等は任意であり、タンデム式における各色作像ユニットの並び順などは任意である。また、タンデム式に限らず、一つの感光体の周囲に複数の現像装置を配置したものや、リボルバ型現像装置を用いる構成も可能である。また、3色のトナーを用いるフルカラー機や、2色のトナーによる多色機、あるいはモノクロ装置にも本発明を適用することができる。もちろん、画像形成装置としては複写機に限らず、プリンタやファクシミリ、あるいは複数の機能を備える複合機であっても良い。
【符号の説明】
【0121】
10 ブラシレスモータ
11 回転子
15U、15V、15W ホール素子(センサ)
20 角度検出装置
30,35 ベクトル生成部(ベクトル生成手段)
40 ベクトル回転部(ベクトル回転手段)
50 角度探索制御部(角度探索手段)
65 2相パルス生成部(2相パルス生成手段)
71 ピーク値検出部(振幅検出手段)
72 比較器(振幅調整手段)
73 可変ゲイン(振幅調整手段)
100 画像形成装置
【先行技術文献】
【特許文献】
【0122】
【特許文献1】特許第4111813号公報
【技術分野】
【0001】
本発明は、モータの回転子などの回転角度を検出する角度検出装置、それを備えるモータを回転駆動するモータ駆動装置及び画像形成装置に関する。
【背景技術】
【0002】
例えばモータを回転位置制御する場合、回転子の回転角度を検出する必要がある。モータの回転子の回転角度は、一般に、モータの回転子の回転軸にロータリーエンコーダを接続して検出することができる。この場合、ロータリエンコーダから、モータの回転子の回転角度に応じて変化する1/4周期の位相差を有する2相のパルス信号を得、当該2相のパルス信号のエッジ検出結果と2相のHigh/Low状態から、相対的なモータの回転子の回転角度を検出することができる。
【0003】
上記ロータリエンコーダとしての光学式エンコーダは、外周部に光学窓となるスリットを等間隔に設けた円盤と、円盤のスリットピッチの1/4間隔で配置された2個のフォトインタラプタにより構成される。そして2個のフォトインタラプタの出力信号を2値化することにより、2相のパルス信号を得ることができる。
【0004】
また、特許文献1に記載の発明では、モータの回転子の回転角度に応じて正弦波状に変化する信号を出力する磁気センサを90°の位相差を持って2つ配置している。ここでモータの回転子の回転角度をθ、得られる2相の磁気センサ信号出力のX相信号をVx、Y相信号をVyとする。その場合Vx、Vyは、それぞれ振幅Axを有する回転角度θについての余弦関数、振幅Ayを有する回転角度θについての正弦関数で表わすことができる。これら余弦関数及び正弦関数は、例えば図19及び、90°の位相差を有する2相正弦波信号を示す「数1」の式に示される。なお、磁気センサ信号出力の振幅Ax、Ayの差によって誤差が生じるが、ここではこれらは事前に調整されており、Ax=Ayとする。
【0005】
【数1】
ここで、磁気センサ出力信号の値Vx、Vyを検出すると、図20に示すように、検出したVx、VyがXY平面上に形成するベクトルとX軸との角度が、モータの回転子の回転角度θに相当する。そこで、角度探索アルゴリズムを示す「数2」の式に従う回転変換により、図20に示すように、所定のステップ角θstepずつ負の回転方向へ繰り返し回転させ、回転したベクトルのY成分Vy'(n)が、正から負へ変化するまで繰り返す。このようにして得られるベクトルの総回転角度θnが、モータの回転子の回転角度の検出角度になる。以上の動作を周期的に実行することにより、モータの回転子の回転角度を検出することができる。
【0006】
【数2】
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、上記した光学式エンコーダは、スリット円盤とフォトインタラプタという部品が必要であり、さらにそれらの組み付けも必要になるため、これらがコスト増加の原因となる。
【0008】
また、上述した特許文献1に記載の方式においても、例えば、ブラシレスモータは転流タイミング検知用に所定の位相差を持って配置された複数のホール素子を備えている。しかし、最も一般的な3相ブラシレスモータにおける転流用のホール素子は、出力信号が互いに120°の位相差を有するように配置されている。これに対し上述のようにしてモータの回転子の回転角度の検出を行うためには、90°の位相差を有する信号を出力するホール素子を追加しなければならない。従ってコイル、回転子、120°の位相差を有するホール素子が一体に組み付けられている汎用のモータユニットを使用することはできず、やはりコスト増加の原因となる。
【0009】
そこで本発明は、部品の追加等によるコスト増加を伴わずにモータの回転子の位置を安定的かつ高精度で検出することができる角度検出装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
本発明に従う角度検出装置は、モータの回転子の回転角度に応じて正弦波状に変化する正弦波信号であって、互いの配置位置により位相の異なる正弦波信号を出力する複数のセンサと、少なくとも2つの前記正弦波信号同士を相互演算した結果により表されるベクトルを生成するベクトル生成手段と、前記ベクトルと複数の位相を有する基準正弦波とを演算することにより前記ベクトルを回転させるベクトル回転手段と、前記ベクトル回転手段を用いて前記ベクトルが所定位相になるまで前記ベクトルを順次回転させ、回転前の前記ベクトルと当該所定位相とがなす角度をモータの回転子の回転角度として検出する角度探索手段とを備えることを特徴とする。
【発明の効果】
【0011】
本発明に従う角度検出装置により、高価な光学エンコーダなどを付加せずに回転子の位置を安定的かつ高精度で検出することができ、さらにセンサ出力の正弦波の位相差が90°以外の場合でもモータの回転子の位置を検出することができる。
【図面の簡単な説明】
【0012】
【図1】実施例1における角度検出装置の構成図である。
【図2】ホール素子を備えたモータユニットの概略構成図である。
【図3】ホール素子の差動出力信号を示す図である。
【図4】相互演算結果のX軸出力Vx、Y軸出力Vyの信号を示す図である。
【図5】実施例1におけるUVW軸からXY軸への変換を示す図である。
【図6】実施例1におけるメモリに格納される正弦データと余弦データを示す図である。
【図7】実施例1における角度探索シーケンスのタイミングチャートを示す図である。
【図8a】実施例1における角度探索シーケンスの動作(カウントn=1)を示す図である。
【図8b】実施例1における角度探索シーケンスの動作(カウントn=2)を示す図である。
【図8c】実施例1における角度探索シーケンスの動作(カウントn=3)を示す図である。
【図8d】実施例1における角度探索シーケンスの動作(カウントn=4)を示す図である。
【図9】2相のパルス信号の生成論理を示す図である。
【図10】実施例2における差動アンプ及びベクトル生成部の構成図である。
【図11】実施例2におけるUVW軸からXY軸への変換を示す図である。
【図12】実施例3におけるモータ駆動装置の全体構成図である。
【図13】ホール信号を生成する条件を示す図である。
【図14】駆動転流回路の上側アームの構成図である。
【図15】変調部の動作を示す図である。
【図16】ホール信号と矩形波駆動の相論理を示す図である。
【図17】相論理とゲート信号の関係を示す図である。
【図18】本発明を適用した画像形成装置の一例を示す断面構成図である。
【図19】90°の位相差を有する2相正弦波信号の波形を示す図である。
【図20】従来技術における角度探索アルゴリズムの動作例を示す図である。
【図21】従来技術におけるモータ駆動装置の全体構成を示す図である。
【発明を実施するための形態】
【0013】
以下では、本発明の実施例1における装置構成について図面を用いて説明する。
【0014】
先ず、図2に示すように、ブラシレスモータ10は、互いに120°の位相差を持ち、Y字結線されたU相、V相、W相の3相で構成されるそれぞれのコイル13U,13V,13W(図2においては省略、図12参照)を有する。ブラシレスモータ10は更に、コイル13U,13V,13Wと対向する位置に配置され、S極、N極が交互に並んだ永久磁石を有する回転子11を有する。ブラシレスモータ10は、コイル端子12U,12V,13Wからそれぞれコイル13U,13V,13Wへ、回転角度に応じて適切に転流された電流(駆動電流)が供給されて回転駆動される(詳細については図12乃至17と共に後述する)。なお、本実施例における回転子11の永久磁石は図2に示されるように8極(極ペア数は4)とする。
【0015】
また図示のように、3個のホール素子15U、15V、15Wが、回転子11の近傍に固定して配置されており、回転子11の回転角度位置を検出する。それぞれのホール素子15U、15V、15Wは、ゲルマニウムやInSbのホール効果を利用して、回転子11の磁界の変化に応じて変化するU相、V相、W相の差動信号HU+/HU−、HV+/HV−、HW+/HW−を出力する。差動信号HU+/HU−、HV+/HV−、HW+/HW−をシングルエンド化することによってアナログホール信号HAU、HAV、HAWを得る。シングルエンド化とは、差動信号をシングルエンド信号に変換することを言う。これらアナログホール信号HAU,HAV,HAWは図3に示すように回転子11の回転に応じて正弦波状に変化する。これらアナログホール信号HAU,HAV,HAWが互いに120°の位相差を有する波形になるように、ホール素子15U,15V,15Wは配置されている。なお、図3では仮に3相の振幅を等しく示している。
【0016】
このとき、本実施例における回転子11の磁極数は8であるため、図3に示す各正弦波は、回転子11の1回転当たり4周期含まれる。逆に言えば回転子11の1/4回転が図3に示す各正弦波の1周期に相当する。以下では説明の便宜上、ブラシレスモータ10の回転子11の回転角度(θ)を、アナログホール信号HAU,HAV,HAWの正弦波の1周期を360°として示す。従って、実際のブラシレスモータ10の回転子11の回転角度は、このようにしてアナログホール信号HAU,HAV,HAWの正弦波の1周期を360°として示された値(θ)に対し、その1/4の値となる。例えばこのようにしてアナログホール信号HAU,HAV,HAWの正弦波の1周期を360°として示された回転角度の値(θ)が360°であった場合、実際のブラシレスモータ10の回転子11の回転角度はその1/4の90°ということになる。
【0017】
なお、ホール素子15U、15V,15Wを駆動するためには、前記差動信号の出力方向及び検出する磁束の方向に対して垂直に電圧を掛ける必要があるが、図2における図示は省略する。
【0018】
なお、ホール素子15U、15V,15Wは、回転子の回転角度に応じて正弦波状に変化する正弦波信号であって、互いの配置位置により位相の異なる正弦波信号を出力する複数のセンサに相当する。
【0019】
次に、図1を用いて本実施例における角度検出装置20の構成を説明する。
【0020】
角度検出装置20は大略、差動アンプ22,ベクトル生成部30,ベクトル回転部40,角度探索制御部50,2相パルス生成部65,ホール駆動部70、発振器62及び分周器63を有する。
【0021】
発振器62は、周期的なパルス信号であるクロック信号clkを出力する。分周器63は、クロック信号clkを分周してトリガfsを出力する。このとき、分周比は後述する角度探索のシーケンスに対して矛盾の無いように、後述する検出角度データθdの語長よりも大きくする必要がある。
【0022】
ブラシレスモータ10のホール素子15U、15V、15Wからの差動信号を入力された差動アンプ22は、U相の差動信号HU+/HU−、V相の差動信号HV+/HV−をシングルエンド化して、それぞれアナログホール信号HAU、HAVとして出力する。このとき、アナログホール信号HAU、HAVの波形は、3相ホール素子の差動出力波形を示す「数3」の式のように示される。すなわち、上記の如くアナログホール信号HAU,HAV,HAWの正弦波の1周期を360°として示された回転子11の回転角度θ(以下単に「回転角度θ」と称する)に対し、位相が異なる2つの正弦関数で表わされる。ここで、HAU、HAVの振幅をそれぞれAu、Avとする。
【0023】
【数3】
次に、ベクトル生成部30の構成及び動作を説明する。
【0024】
差動アンプ22に接続したベクトル生成手段としてのベクトル生成部30は、減算アンプ32によりアナログホール信号HAU、HAVに対し「数4」の上式の左辺に示す減算を実行し、さらに減算結果にゲイン(1/√3)を乗じた演算結果を得る。そして得られた演算結果を、S/H部33Xにより、前記トリガfsのタイミングでサンプルホールドしてX軸成分Vxとして出力する。同様に、ベクトル生成部30は、加算アンプ31によりアナログホール信号HAU、HAVに対し「数4」の下式の左辺に示す加算を実行した演算結果を得る。そして得られた演算結果を、S/H部33Yにより、前記トリガfsのタイミングでサンプルホールドしてY軸出力Vyとして出力する。
【0025】
これによりX軸出力Vx、Y軸出力Vyは、「数4」の各式の右辺及び図4に示すように、90°の位相差を持って回転角度θに対して正弦波状に変化する。ただし、前記アナログホール信号HAU、HAVの振幅Au、Avは、後述するホール駆動部70の振幅調整により互いに等しくされている。
【0026】
【数4】
ここで、図5を用いて「数4」の各式が示す演算の意味を説明する。
【0027】
直交するXY平面上に、Y軸に対して+60°の方向にU軸を、−60°の方向にV軸をとる。U軸、V軸上の長さ1の単位ベクトルU、Vを考えれば、ベクトル(U+V)はY軸上の単位ベクトルYになり、ベクトル(U−V)はX軸上の長さ√3のベクトルになる。つまり、HAU、HAVの相互演算を示す式である「数4」は、120°の角をなすUV軸からXY軸座標系への座標変換を示しており、変換後の長さを等しくするために(HAU−HAV)には1/√3を乗じている。
【0028】
なお、X軸成分Vx、Y軸成分Vyにより表されるベクトルは、「正弦波信号同士を相互演算した結果により表されるベクトル」である。すなわち図4から明らかなように、X軸成分Vx、Y軸成分Vyにより表されるベクトルは、「数4」の各式の右辺、すなわちAu*cos(θ)及びAu*sin(θ)により表されるベクトルである。また、「数4」の各式の左辺に示されるように、これらAu*cos(θ)及びAu*sin(θ)は、HAU及びHAVの加減算等(相互演算)によって求まり、「数3」に示されるように、HAU及びHAVはそれぞれ正弦波信号だからである。
【0029】
次に、ベクトル回転部40の構成及び動作を説明する。
【0030】
ベクトル生成部30に接続したベクトル回転手段としてのベクトル回転部40は、X軸成分Vx、Y軸成分Vyにより表されるベクトルを、後述する検出角度データθdの値に従って回転変換して、それぞれ回転X軸成分Vx'、回転Y軸成分Vy'として出力する。
【0031】
メモリ45は、不揮発メモリであり、図6に示すように、それぞれ1周期を64分割して、振幅を128[LSB]で表す正弦データsindat及び余弦データcosdatを保持する。そして、後述する6ビットの語長を有する検出角度データθdの値に従って、それぞれの対応するデータ値を出力する。
【0032】
DAC(デジタル−アナログコンバータ)46は、メモリ45の出力したデータ値sindat、cosdatを値に比例したアナログ値に変化して、アナログ正弦値Asin、アナログ余弦値Acosとして出力する。このとき、出力値にはオフセットを与えてもよい。
【0033】
乗算器41は、アナログ乗算器であり、X軸成分Vx又はY軸成分Vyと、アナログ正弦値Asin又はアナログ余弦値Acosとを組み合わせて乗じた4つの乗算結果を出力する。
【0034】
加算アンプ42は、乗算器41の乗算結果から所定の2つを加算して、回転X軸成分Vx'として出力する。なお、このときVx'にゲインを乗じる構成としてもよい。
【0035】
減算アンプ43は、乗算器41の乗算結果から所定の2つの一方から他方を減算して、回転Y軸成分Vy'として出力する。なお、このときVy'にゲインを乗じる構成としてもよい。
【0036】
次に、ベクトル回転部40の演算について詳細に説明する。
【0037】
回転X軸成分Vx'は、X軸成分Vxとアナログ余弦値Acosの乗算結果と、Y軸成分Vyとアナログ正弦値Asinの乗算結果を加算した値である。すなわちVx'=Acos・Vx+Asin・Vyの演算がなされる。回転Y軸成分Vy'は、X軸成分Vxとアナログ正弦値Asinの乗算結果を、Y軸成分Vyとアナログ余弦値Acosの乗算結果から減算した値である。すなわちVy'=−Asin・Vx+Acos・Vyの演算がなされる。
【0038】
ここで、「数5」に示す式による演算は、ベクトル(Vx、Vy)をベクトル(Vx'、Vy')へ時計周り方向へθだけ回転させる1次変換を意味する。「数5」によれば、Vx',Vy'はそれぞれ、Vx'=cosθ・Vx+sinθ・Vy、Vy'=−sinθ・Vx+cosθ・Vyとして得られる。「数5」の式による演算と同様に、前述のベクトル回転部40の演算は、X軸成分Vx、Y軸成分Vyの表すベクトルを検出角度データθdの値だけ時計回りに回転させることに相当する。
【0039】
【数5】
なお、本実施例においては乗算器41を4つ並べる構成としているが、1つの乗算器を時系列で交互に使い回すように構成してもよい。また、乗算器はアナログ乗算器を用いているが、全ての乗算器をデジタル回路で実現したデジタル乗算器を用いてもよい。この場合、デジタル回路の構成に合わせて信号のアナログ/デジタルの変換が必要となる。
【0040】
なお、本実施例におけるアナログ正弦値Asin及びアナログ余弦値Acosは、複数の位相を有する基準正弦波に相当する。
【0041】
次に、角度探索手段としての角度探索制御部50の構成及び動作を説明する。
【0042】
角度探索制御部50は、出力する検出角度データθdを変化させて、回転Y軸成分Vy'が近似的に0になる検出角度を探索する処理をトリガfsの到来の度に実行する。
【0043】
符号判定部52は、回転Y軸成分Vy'の値の正負を判定して、符号判定結果signを出力する。なお、図1においては0を基準に示しているが、所定のオフセット値に対する大小により符号を判定するように構成してもよい。
【0044】
SAR53は、逐次近似レジスタであり、後述するシーケンサ51により値を適宜書き換えられ、その値を検出角度データθdとして出力する。本実施例においては、データ語長は6ビットとする。
【0045】
シーケンサ51は、SAR53の値を書き換え、その結果として変化する符合判定結果signの値によりSAR53の値を確定させるという角度探索シーケンスを、トリガfsの到来の度に実行する。
【0046】
以下では、シーケンサ51の動作を図7、図8a〜図8dを用いて詳細に説明する。
【0047】
先ず、分周器63からのトリガfsがシーケンサ51に到来すると、図7に示すようにカウントn=1として、また図8aに示すようにSAR53の最上位ビットであるbit5の値のみ1として、残りの値は全て0とする。なお、SAR53の値を書き換えることは、検出角度データθdの値を変化させることと同じであり、以下でも同様である。この場合、SAR53の値が、6ビット全てが0の状態から、上記の如く、bit5の値のみが1の状態に変わる。これに応じて検出角度データθdが変わり、このため、ベクトル回転部40によりベクトル(Vx、Vy)が時計回りにθ1=180°だけ回転させられる。このθ1=180°が、上記SAR53の値が6ビット全てが0の状態からbit5の値のみが1の状態へ変化したことに対応するベクトル回転量である。このときの回転X軸成分Vx'、回転Y軸成分Vy'をそれぞれVx'(1)、Vy'(1)とおくと、シーケンサ51は、Vy'(1)の符号を符号判定結果signにより検出する。図8aの例ではVy'(1)の符号は正である。このようにVy'(1)の符号が正ならばSAR53の最上位のビット5を1のまま確定する。
【0048】
次のクロックclkが到来すると、図7に示すようにカウントn=2として、図8bに示すようにSAR53の最上位から2ビット目であるbit4の値を1に書き換える。bit5の値については、確定した値1のままでよいため書き換えず、その他のビットの値も書き換えない。再び検出角度データθdが変わるため、ベクトル回転部40によりベクトル(Vx、Vy)が時計回りにθ1+θ2=180°+90°だけ回転させられる。このθ1+θ2=180°+90°が、当初のSAR53の値が6ビット全て0の状態から、bit5及びbit4のそれぞれの値が1の状態へ変化したことに対応するベクトル回転量である。ここで、同様に回転結果をVx'(2)、Vy'(2)とおくと、シーケンサ51は、Vy'(2)の符号を符号判定結果signにより検出する。図8bの例では、Vy'(2)の符号は負である。このようにVy'(2)の符号が負ならばSAR53のbit4を0に戻して確定する。
【0049】
次のクロックclkが到来すると、図7に示すようにカウントn=3として、図8cに示すようにSAR53の最上位から3ビット目であるbit3の値を1に書き換える。その他のビットの値(bit5が1,bit4が0,bit2〜0がそれぞれ0)は書き換えない。再び検出角度データθdが変わるため、ベクトル回転部40によりベクトル(Vx、Vy)が時計回りにθ1+θ2−θ3=180°+90°−45°だけ回転させられる。このθ1+θ2−θ3=180°+90°−45°(=225°)は、θ1+θ3=180°+45°(=225°)と等しく、すなわち、当初のSAR53の値が6ビット全て0の状態から、bit5及びbit3のそれぞれの値が1の状態へ変化したことに対応するベクトル回転量である。ここで、同様に回転結果をVx'(3)、Vy'(3)とおくと、シーケンサ51は、Vy'(3)の符号を符号判定結果signにより検出する。図8cの例では、Vy'(3)の符号は負である。このようにVy'(3)の符号が負ならばSAR53のbit3を0に戻して確定する。
【0050】
次のクロックclkが到来すると、図7に示すようにカウントn=4として、図8dに示すようにSAR53の最上位から4ビット目であるbit2の値を1に書き換える。その他のビットの値(bit5が1,bit4〜3がそれぞれ0,bit1〜0がそれぞれ0)は書き換えない。再び、検出角度データθdが変わることにより、ベクトル回転部40によりベクトル(Vx、Vy)が時計回りにθ1+θ2−θ3−θ4=180°+90°−45°−22.5°だけ回転する。このθ1+θ2−θ3−θ4=180°+90°−45°−22.5°(=202.5°)は、θ1+θ3=180°+22.5°(=202.5°)と等しく、すなわち、当初のSAR53の値が6ビット全て0の状態から、bit5及びbit2のそれぞれの値が1の状態へ変化したことに対応するベクトル回転量である。ここで、同様に回転結果をVx'(4)、Vy'(4)とおくと、シーケンサ51は、Vy'(4)の符号を符号判定結果signにより検出する。図8dの例では、Vy'(4)の符号は正である。このようにVy'(4)の符号が正ならばSAR53のbit2を1のまま確定する。
【0051】
シーケンサ51は、以上のようなシーケンスを、カウントn=1から6まで、計6ステップ繰り返す。これはSAR53の語長に相当し、全てのbitの値が確定される。
【0052】
以上のシーケンサ51の動作を一般化して説明すると、ベクトル(Vx'(n)、Vy'(n))の回転角度θn(n=1、2、・・・6)を1ステップごとに半分にして、また回転方向としては、回転したベクトルのY軸成分Vy'が正ならば次のステップは時計回り方向へ、負ならば次のステップは反時計回り方向へ、ベクトル(Vx、Vy)を回転させる。
【0053】
最終的にベクトル(Vx'(n)、Vy'(n))がX軸に最も近くまで回転した角度位置が得られる。このようにして、角度探索シーケンスにおける総回転角度が、近似的にベクトル(Vx、Vy)とX軸とのなす角度として検出できる。これは2分法による近似探索アルゴリズムである。
【0054】
以上のようにして、X軸を位相の基準とした、回転子11の回転角度を示す検出角度データθdを検出することができる。ここで図20とともに上述した例では、ベクトルを所定のステップ角ずつ負の回転方向へ繰り返し回転させ、回転したベクトルのY成分が正から負へ変化するまで繰り返すことによって回転子の回転角度を求めていた。これに対し本実施例では、図7乃至図8aとともに上述したように、上記の如く2分法による近似探索アルゴリズムに従い、ステップ毎に回転量を順次半分(1/2)にする。そして回転の結果Y成分の符号が変化する度に回転方向を逆転させることを繰り返してベクトルを徐々にX軸に近づける(例えば図8b乃至図8d中、(Vx'(2)、Vy'(2))→(Vx'(3)、Vy'(3))→(Vx'(4)、Vy'(4)))。その結果上記の如く、最終的にベクトルがX軸に最も近くまで回転した角度位置を得ることができる。そして角度探索シーケンスにおける総回転角度が、回転子11の回転角度を示すベクトルとX軸とのなす角度として検出できるのである。なおこのとき、検出角度データθdに所定のオフセットを加えた値を回転子角度として検出し、X軸以外の所定の位相を基準として回転子11の回転角度を示す検出角度データθdを検出するように構成してもよい。
【0055】
次に、2相パルス生成手段としての2相パルス生成部65の構成及び動作を説明する。
【0056】
2相パルス生成部65は、図9に示す生成論理に従い、上記検出角度データθdの下位2ビットを参照して、分周器63からのトリガfsの到来の度に出力する2相のパルス信号ENCA、ENCBを更新する(図7の最下段のENCA、ENCB参照)。このようにして、コスト増加の原因となる高価な光学エンコーダなどを備えなくても、1/4周期の位相差を有する2相のパルス信号を得ることができるため、装置を安価に構成することができる。なお、この点につき、図21と共に後述する。
【0057】
次に、ホール駆動部70の構成及び動作を説明する。
【0058】
ホール駆動部70は、U相のホール素子15Uを駆動するための、不図示の電源から供給される所定の電圧又は電流であるホール素子駆動信号Hdrv、及びV相のホール素子15Vを駆動するためのV相ホール素子駆動信号HVdrvを出力する。
【0059】
ここで、V相ホール素子駆動信号HVdrvは、以下のピーク検出部71、比較部72、可変ゲイン部73により生成される。
【0060】
振幅検出手段としてのピーク値検出部71は、前記アナログホール信号HAU、HAVのそれぞれの正弦波形のピーク値を検出し、それぞれのピーク値を出力する。
【0061】
振幅調整手段としての比較部72は、前記U相、V相のピーク値を比較して、U相のピーク値がV相のピーク値より大きい場合は振幅差が正の値となるように、U相のピーク値がV相のピーク値より小さい場合は振幅差が負の値となるように、比較結果を出力する。
【0062】
振幅調整手段としての可変ゲイン部73は、前記ホール素子駆動信号Hdrvにゲインを乗じてV相ホール素子駆動信号HVdrvとして出力する。このとき、比較部72の出力する比較結果が正のときはゲインが大きくなるように、負のときはゲインが小さくなるようにゲインを変化させる。なお、積分器を用いて比較結果を積分し、積分結果に応じてゲインを変化させるように構成してもよい。
【0063】
W相のホール素子15Wを駆動するためのホール素子駆動信号を出力するための構成については説明を省略するが、U相のホール素子15U又はV相のホール素子15Vを駆動するためのホール素子駆動信号を出力するための構成と同様の構成である。
【0064】
ホール駆動部70の上記構成によって、アナログホール信号HAU、HAVの振幅はほぼ等しく調整される。
【0065】
以上が、本実施例1における角度検出装置20の構成及び動作の説明である。
【0066】
本実施例1では、ベクトル生成部30によって、ブラシレスモータ10に備えられているホール素子15U、15V,15Wが出力する、位相差が90°でない正弦波信号から、図5とともに上記した演算により、位相差が90°の正弦波信号を合成する。従って新たにセンサを追加することなく回転子11の回転角度の検出をすることができる。
【0067】
また、角度探索制御部50により、2分法による近似探索アルゴリズムを用いて回転子11の回転角度を探索するため、簡易な構成で、所定のステップ数で安定的に回転子の回転角度を検出することができる。また、2相パルス生成部65を備えているため、モータに高価な光学エンコーダ等を備えていなくても、これと同等の2相のパルス信号を得ることができる。この点につき、図21と共に後述する。
【0068】
また、振幅検出手段としてのピーク値検出部71、振幅調整手段としての比較部72及び可変ゲイン部73を備えているため、高精度に角度検出することができる。
【0069】
また、センサとして安価なホール素子15U,15V,15Wを用いることで、装置を安価に構成することができる。
【0070】
次に、本発明の実施例2における装置構成について図10を用いて説明する。ただし、前記実施例1と共通する説明は適宜省略する。
【0071】
ここで、ブラシレスモータ10、ホール素子15U,15V,15W、発振器62、分周器63、2相パルス生成部65、ベクトル回転部40、角度探索制御部50の構成は実施例1と同様である。ホール駆動部70も実施例1と同様である。従ってW相についてもV相と同様の構成を有する。
【0072】
先ず、差動アンプ25の構成及び動作を説明する。
【0073】
差動アンプ25は、前記U相の差動信号HU+/HU−、前記V相の差動信号HV+/HV−、W相の差動信号HW+/HW−をシングルエンド化して、それぞれアナログホール信号HAU、HAV、HAWとして出力する。このとき、アナログホール信号HAU、HAV、HAWの波形は、「数6」の式に示すような回転子11の回転角度θに対して位相が異なる3つの正弦波の関数で表わされる。この式は3相ホール素子の差動出力波形を示す式である。ここで、HAU、HAV、HAWの振幅をそれぞれAu、Av、Awとする。
【0074】
【数6】
次に、ベクトル生成部35の構成及び動作を説明する。
【0075】
ベクトル生成手段としてのベクトル生成部35は、先ず「数7」の下式に示すように、前記アナログホール信号HAUをそのまま、S/H部33Yにより、トリガfsのタイミングでサンプルホールドして、Y軸成分Vyとして出力する。一方で、ベクトル生成部35は、「数7」の上式の左辺に示すように、減算アンプ36により、前記アナログホール信号HAV、HAWの相互の減算結果にゲイン(1/√3)を乗じた結果を、S/H部33Xにより、トリガfsのタイミングでサンプルホールドして、X軸出力Vxとして出力する。
【0076】
【数7】
この演算により、X軸出力Vx、Y軸出力Vyは、図4に示すように、90°の位相差を持って回転角度θに対して正弦波状に変化する。ただし、前記アナログホール信号HAU、HAV、HAWの振幅Au、Av、Awは、前述のホール駆動部70の振幅調整によりほぼ等しくされる。
【0077】
ここで、図11を用いて「数7」の式が示す演算の意味を説明する。
【0078】
直交するXY平面上において、Y軸と同じ方向にU軸を、−120°の方向にV軸を、+120°の方向にW軸をとる。U軸、V軸、W軸上の長さ1の単位ベクトルU、V、Wを考えれば、ベクトルUはY軸上の単位ベクトルになり、ベクトル(W−V)は、X軸上の長さ√3のベクトルになる。つまり、HAU、HAV、HAWの相互演算を示す「数7」の式は、120°の角をなすUVW軸からXY軸座標系への座標変換を示しており、変換後の長さを等しくするために(HAW−HAV)には1/√3を乗じている。
【0079】
なお、Y軸成分VyとX軸成分Vxにより表されるベクトルが、「正弦波信号と、少なくとも2つの正弦波信号同士を相互演算した結果とにより表されるベクトル」である。すなわち図4から明らかなように、X軸成分Vx、Y軸成分Vyにより表されるベクトルは、「数7」の各式の右辺、すなわちAu*cos(θ)及びAu*sin(θ)により表されるベクトルである。また、「数7」の各式の左辺に示されるように、これらのうちAu*cos(θ)はHAW及びHAVの減算等(相互演算)によって求まり、Au*sin(θ)はHAUである。そしてこれらHAU,HAV,HAWは、「数6」に示されるように、それぞれ正弦波信号だからである。
【0080】
以上が本実施例2における角度検出装置の構成及び動作であり、この角度検出装置によれば実施例1と同様の効果が得られる。
【0081】
次に、本発明の実施例3におけるモータ駆動装置500の構成について図12を用いて説明する。ただし、実施例1又は実施例2と共通する部分の説明は適宜省略する。
【0082】
ここで、ブラシレスモータ10、ホール素子15U,15V,15W、角度検出装置20は、実施例1における構成と同様である。
【0083】
角度検出装置20は上述した実施例1における角度検出装置20であり、回転子11の回転角度の変化に応じて2相のパルス信号ENCA,ENCBを出力する(図1、図9参照)。なお、図12における角度検出装置20は検出角度データθdを出力していないが、検出角度データθdを出力して位置制御や正弦波駆動等に利用するように構成してもよい。
【0084】
ブラシレスモータ10及び角度検出装置20に接続したホールコンパレータ83は、ホール素子15U、15V、15Wのそれぞれの差動信号HU+/HU−、HV+/HV−、HW+/HW−を、図13に示す論理に従って2値化する比較器であり、2値化した信号をホール信号HG(HU、HV、HW)として出力する。図13中、例えば最上段のHG(HU)は、HU+がHU−以上の場合ハイ(High)レベルの信号を出力し、HU+がHU−未満の場合ロー(Low)レベルの信号を出力する。HG(HV),HG(HW)のそれぞれについても同様である。
【0085】
駆動転流回路85は、図12及び図14に示すように、電源Vccに接続されたスイッチング素子88とダイオード89が並列に接続された上側アーム86と、これと同様に構成されて、接地GNDに接続された下側アーム87とが、3相接続されて構成されている。それぞれのスイッチング素子は、ゲート信号(UH、VH、WH、UL、VL、WL)により駆動され、ブラシレスモータ10のコイル13U,13V,13Wにパルス幅変調された電圧を印加して、コイル13U,13V,13Wへ駆動電流を供給し、ブラシレスモータ10を回転駆動する。
【0086】
変調部80は、駆動電圧指令値Vamp*をパルス幅変調(Pulse Wide Modulation:以下「PWM」と呼ぶ)して、所定の論理に基づいてPWM相ゲート信号XH、XLを生成する。
【0087】
以下では、図15を用いて変調部80の動作を説明する。
【0088】
図15の1段目に示す搬送波Vcは、所定のPWM周期の三角波であり、接地GNDから電源電圧Vccまでの振幅を有するとする。変調部80は、非負の値をとる振幅指令値Vamp*と、搬送波Vcの大小を比較して、2段目に示すPWM信号Xonを生成する。
【0089】
次に、変調部80は、図15の3段目、4段目に示すように、PWM信号Xonに対してtdだけ遅れた信号である、上側アームのスイッチング素子88のPWM相ゲート信号XHを生成する。また、変調部80は、PWM信号Xonを反転させ、かつ立ち上がり(Xonでは立ち下がり部分)をtdの2倍だけ遅らせた信号である、下側アームのスイッチング素子のPWM相ゲート信号XLを生成する。なお、tdは、上側アームと下側アームのスイッチング素子の短絡防止を目的に設けられた短絡防止区間(デッドタイム)であり、tpwmはPWM周期(搬送波Vcの周期)の長さである。
【0090】
次に、転流制御部81の構成及び動作を説明する。
【0091】
PWM相ゲート信号XH、XLを入力された転流制御部81は、上記ホール信号HG(HU、HV、HW)のHigh/Lowの論理に基づいて、U相、V相、W相のそれぞれに適切なゲート信号を選択して出力する。
【0092】
先ず、矩形波駆動でモータを回転駆動するためには、転流制御部81は、図16に示すようにホール信号HGの状態に従って、U相、V相、W相をPWM相、LOW相、HiZ相のいずれかの相状態に割り振る。そして、相状態毎に以下に示すゲート信号を出力する。
【0093】
すなわち、図17に示すように、転流制御部81は、PWM相の場合、上側アームのゲート信号YHとしてXHを選択し、下側アームのゲート信号YLとしてXLを選択する。LOW相の場合、上側アームのゲート信号YHは常にLo(ロー、Low)とし、下側アームのゲート信号YLは常にHi(ハイ、High)に設定する。HiZ相の場合は、上側アームのゲート信号YHも下側アームのゲート信号YLも、常にLo(ロー、Low)に設定する。なお駆動転流回路85に含まれる各スイッチング素子は、印加されるゲート信号がHiの場合導通し、Loの場合遮断される。又ゲート信号YH,YLは、それぞれ、U相の場合上記ゲート信号UH,UL,V相の場合上記ゲート信号VH,VL,W相の場合上記ゲート信号WH,WLをそれぞれ意味する(図12参照)。
【0094】
これらの選択は、前記PWM周期の先頭において3相とも同時に更新される。回転方向を逆転する場合は、図16においてPWM相とLOW相を入れ替えて選択すればよい。以下に駆動転流回路85による転流動作の一例について説明を行う。
【0095】
例えば図16中、最初のPWM周期の相論理はU相がLOW相、V相がPWM相、W相がHiz相である。この場合、図17の関係に従い、U相では上側アーム86のスイッチング素子88が遮断されて下側アーム87のスイッチング素子が導通する。又V相では図15のXH,XLに従い、上側アーム86のスイッチング素子88が一定期間導通し、下側アーム87のスイッチング素子は当該上側アームの一定期間の導通期間を含む一定期間遮断される。W相では上側アーム86、下側アーム87の双方のスイッチング素子が遮断される。その結果この場合、上記一定期間の導通期間の間、V相の上側アーム86及びU相の下側アーム87のそれぞれのスイッチング素子を介し、V相のコイル13VからU相のコイル13Uへ駆動電流が流れる。その結果、各コイル13V,13Uに流れる駆動電流と図2に示す回転子11の永久磁石による磁界との関係で回転駆動力が生じ、回転子11が駆動される。
【0096】
図16中、次(2番目)のPWM周期の相論理は、U相がLOW相、V相がHiz相、W相がPWM相である。この場合上記同様の転流動作により、W相の上側アーム86の一定期間の導通期間の間、当該上側アーム86及びU相の下側アーム87のそれぞれのスイッチング素子を介し、W相のコイル13WからU相のコイル13Uへ駆動電流が流れる。その結果、各コイル13W,13Uに流れる駆動電流と図2に示す回転子11の永久磁石による磁界との関係で回転駆動力が生じ、回転子11が駆動される。
【0097】
図16中、更に次(3番目)のPWM周期の相論理は、U相がHiz相、V相がLOW相、W相がPWM相である。この場合上記同様の転流動作により、W相の上側のアーム86の一定期間の導通期間の間、当該上側アーム86及びV相の下側アーム87のそれぞれのスイッチング素子を介し、W相のコイル13WからV相のコイル13Vへ駆動電流が流れる。その結果、各コイル13W,13Vに流れる駆動電流と図2に示す回転子11の永久磁石による磁界との関係で回転駆動力が生じ、回転子11が駆動される。
【0098】
以降、図16中、4番目のPWM周期ではU相の上側アームの一定期間の導通期間の間、当該上側アーム86及びV相の下側アーム87のそれぞれのスイッチング素子を介し、U相のコイル13UからV相のコイル13Vへ駆動電流が流れる。5番目のPWM周期ではU相の上側アームの一定期間の導通期間の間、当該上側アーム86及びW相の下側アーム87のそれぞれのスイッチング素子を介し、U相のコイル13UからW相のコイル13Wへ駆動電流が流れる。6番目のPWM周期ではV相の上側アームの一定期間の導通期間の間、当該上側アーム86及びW相の下側アーム87のそれぞれのスイッチング素子を介し、V相のコイル13VからW相のコイル13Wへ駆動電流が流れる。以降、上述した、図16に示す一連のPWM周期(6周期)のパターンが繰り返され、駆動転流回路85の転流動作によってコイル13U,13V,13Wのそれぞれに適宜流される駆動電流により、回転子11が連続して回転駆動される。
【0099】
以上が、本実施例3におけるモータ駆動装置500の構成及び動作である。
【0100】
ここで、実施例3のモータ駆動装置500の効果を説明するため、比較の目的で、図21を用いて従来のモータ駆動装置510の構成を説明する。なお、実施例3のモータ駆動装置500と共通する部分の説明は省略する。
【0101】
図21の構成において、ブラシレスモータ10、ホール素子15U,15V,15W、変調器80、転流制御部81、ホールコンパレータ83及び駆動転流回路85は、図12に示される、実施例3のモータ駆動装置500におけるものとそれぞれ同様である。
【0102】
図21中、エンコーダ16は光学式エンコーダであり、ブラシレスモータ10の回転軸に接続された、外周部に光学窓となるスリットを等間隔に設けた円盤と、円盤のスリットピッチの1/4間隔で配置された2個のフォトインタラプタを有する。当該エンコーダ16は、上記2個のフォトインタラプタの出力信号を2値化することにより、ブラシレスモータ10の回転に応じて変化する、2相のパルス信号ENCA、ENCBを出力する。なお、図12に示される、実施例3のモータ駆動装置500に含まれる角度検出器20が出力する2相のパルス信号は、上記エンコーダ16が出力する2相のパルス信号と等価である。
【0103】
以上が、従来のモータ駆動装置510の構成である。
【0104】
このように、図12に示される実施例3のモータ駆動装置500では、ブラシレスモータ10の転流駆動のために必ず備えられているホール素子15U,15V,15Wの出力信号を以下に述べる用途に利用する。すなわち、図21の従来例と同様にホールコンパレータ83,転流制御部81,駆動転流回路85及び変調器80による転流タイミングの検出に利用するだけではなく、角度検出器20による回転角度の検出にも利用する。その結果、図21に示されるエンコーダ16等の如くの別個のセンサの追加が不要となり、転流タイミングの検出のための構成とは別に角度検出のための構成を備えるモータ駆動装置を安価に構成することができる。ここで「転流タイミングの検出のための構成」とは、例えば図12の実施例3の場合、上記ホールコンパレータ83,転流制御部81,駆動転流回路85及び変調器80を含む構成であり、「角度検出のための構成」とは例えば上記角度検出装置20を含む構成である。
【0105】
最後に、本発明のモータ駆動装置500を適用可能な画像形成装置の一例について説明する。
【0106】
図18に示す画像形成装置100は、いわゆるタンデム型のフルカラー装置であり、画像読み取り部を備えて複写装置として構成されたものである。本例の複写装置は、給紙テーブル120の上に装置本体110を搭載し、装置本体110の最上部にはスキャナ130が配置され、さらにその上に自動原稿送り装置(ADF)140を設けてある。
【0107】
スキャナ130の内部には、照明用光源とミラーから構成された第一走行体131と、ミラーを含む第二走行体132とがコンタクトガラス133に平行に移動可能に設けられている。第二走行体132は、第一走行体131の1/2の速度で移動する公知の光学系を採用しており、これらの走行体131,132が移動しながらコンタクトガラス132上に停止された原稿画像を走査する。光源で照明された原稿からの反射光は、集光レンズ134で結像され、CCD等の固体撮像素子135に取り込まれる。そのデータは複写装置本体110の画像処理部(図示を省略)にて処理される。
【0108】
複写装置本体110のほぼ中央には、中間転写ベルト101が配設されている。この中間転写ベルト101の上辺に沿って4つの作像ユニット102が並べて配置されている。各作像ユニット102においては、感光体ドラム103の周囲に電子写真プロセスに必要な各機器が配置されている。
【0109】
中間転写ベルト101は、複数の支持ローラに張架されて図中時計回りに回転可能に設けられている。中間転写ベルト101の内側で、各作像ユニットの感光体ドラム103に対向する位置には、一次転写手段である転写ローラが配置されている。
【0110】
上記各作像ユニット102の上方には露光装置104が配設されている。露光装置104からの書き込み光は、各作像ユニット102の感光体ドラム103にそれぞれ照射される。
【0111】
中間転写ベルト101の下方には転写搬送ベルト105が配置されている。転写搬送ベルト105を支持する一方のローラが二次転写ローラとして機能し、中間転写ベルト101上の画像を記録媒体(転写紙等)に二次転写する。
【0112】
転写搬送ベルト105の左方には定着装置106が設けられている。定着装置106の左方の装置側面には排紙トレイ107が設けられている。また、装置本体110の最下部には、シート反転部108が設けられている。そして、給紙テーブル120には、2段の給紙カセット121,122が備えられている。
【0113】
さて、本例のカラー複写装置を用いてコピーをとるときは、ユーザはADF140の原稿テーブル又はスキャナのコンタクトガラス133上に原稿をセットする。そして、図示しない操作パネル上に設けられたスタートスイッチを押すと、スキャナ130が駆動され、光源からの反射光をミラーで反射することにより集光レンズ134を通して読取りセンサ(画像撮像素子135)に入射させて原稿情報を読み取る。
【0114】
また、同じく操作パネル上に設けられたスタートスイッチを押すと、図示しない駆動モータで中間転写ベルト101が回転駆動される。同時に、個々の作像ユニット102において感光体103が回転され、各感光体103上にそれぞれ、ブラック,イエロー,マゼンタ,シアンの単色画像が形成される。そして、それらの単色画像が中間転写ベルト101上に順次転写されて合成カラー画像が形成される。
【0115】
ここで上記中間転写ベルト101を回転駆動する図示しない駆動モータとして、図12と共に上述した実施例3のモータ駆動装置500によって駆動されるブラシレスモータ10を適用することができる。そして当該駆動モータとしてのブラシレスモータ10を駆動するモータ駆動装置として、上記実施例3のモータ駆動装置500を適用することができる。その場合、図18においては図示が省略されているが、実施例3のモータ駆動装置500が画像形成装置100に含まれる。
【0116】
また、スタートスイッチが押されると、給紙テーブル120から用紙が繰り出され、レジストローラ126に突き当てられて一時停止される。
【0117】
そして、中間転写ベルト101上の合成カラー画像にタイミングを合わせてレジストローラ126が回転され、中間転写ベルト101と転写搬送ベルト105との間に用紙が送り込まれ、二次転写部で画像が転写されて用紙上にカラー画像が記録される。画像転写後の用紙は定着装置106に送られ、トナー像が定着されて排紙トレイ107に排出される。
【0118】
以上、本発明を図示の実施例により説明したが、本発明はこれに限定されるものではない。例えば、モータはアウタ・ロータ型に限らず、インナ・ロータ型も可能である。コイルの結線パターンもY字結線(スター結線)に限らずデルタ結線も可能である。モータ回転子の極数も8極に限らない。
【0119】
本発明のモータ駆動装置は家電製品、OA機器等に好適に適用可能であるが、OA機器としては上述した画像形成装置の他にも画像読取装置等に適用することができる。
【0120】
また、画像形成装置においては、作像部の構成等は任意であり、タンデム式における各色作像ユニットの並び順などは任意である。また、タンデム式に限らず、一つの感光体の周囲に複数の現像装置を配置したものや、リボルバ型現像装置を用いる構成も可能である。また、3色のトナーを用いるフルカラー機や、2色のトナーによる多色機、あるいはモノクロ装置にも本発明を適用することができる。もちろん、画像形成装置としては複写機に限らず、プリンタやファクシミリ、あるいは複数の機能を備える複合機であっても良い。
【符号の説明】
【0121】
10 ブラシレスモータ
11 回転子
15U、15V、15W ホール素子(センサ)
20 角度検出装置
30,35 ベクトル生成部(ベクトル生成手段)
40 ベクトル回転部(ベクトル回転手段)
50 角度探索制御部(角度探索手段)
65 2相パルス生成部(2相パルス生成手段)
71 ピーク値検出部(振幅検出手段)
72 比較器(振幅調整手段)
73 可変ゲイン(振幅調整手段)
100 画像形成装置
【先行技術文献】
【特許文献】
【0122】
【特許文献1】特許第4111813号公報
【特許請求の範囲】
【請求項1】
モータの回転子の回転角度に応じて正弦波状に変化する正弦波信号であって、互いの配置位置により位相の異なる正弦波信号を出力する複数のセンサと、
少なくとも2つの前記正弦波信号同士を相互演算した結果により表されるベクトルを生成するベクトル生成手段と、
前記ベクトルと複数の位相を有する基準正弦波とを演算することにより、前記ベクトルを回転させるベクトル回転手段と、
前記ベクトル回転手段を用いて、前記ベクトルが所定位相になるまで前記ベクトルを順次回転させ、回転前の前記ベクトルと当該所定位相とがなす角度を前記モータの回転子の回転角度として検出する角度探索手段とを備える
ことを特徴とする角度検出装置。
【請求項2】
モータの回転子の回転角度に応じて正弦波状に変化する正弦波信号であって、互いの配置位置により位相の異なる正弦波信号を出力する複数のセンサと、
前記正弦波信号と、少なくとも2つの前記正弦波信号同士を相互演算した結果とにより表されるベクトルを生成するベクトル生成手段と、
前記ベクトルと複数の位相を有する基準正弦波とを演算することにより、前記ベクトルを回転させるベクトル回転手段と、
前記ベクトル回転手段を用いて、前記ベクトルが所定位相になるまで前記ベクトルを順次回転させ、回転前の前記ベクトルと当該所定位相とがなす角度を前記モータの回転子の回転角度として検出する角度探索手段とを備える
ことを特徴とする角度検出装置。
【請求項3】
前記ベクトル生成手段は、互いに120°の角をなす座標軸による座標系から互いに90°の角をなす座標軸による座標系への座標変換を行う
ことを特徴とする請求項1又は2に記載の角度検出装置。
【請求項4】
検出した回転角度に基づいて、前記モータの回転子の回転角度に応じて変化する1/4周期の位相差を有する2相のパルス信号を生成する2相パルス生成手段をさらに備えることを特徴とする請求項1〜3のいずれか1項に記載の角度検出装置。
【請求項5】
前記角度探索手段は、2分法により回転前の前記ベクトルと前記所定位相とがなす角度を検出することを特徴とする請求項1〜4のいずれか1項に記載の角度検出装置。
【請求項6】
前記正弦波信号の振幅を検出する振幅検出手段と、検出した振幅に基づいて、前記正弦波信号の振幅を所望の値に調整する振幅調整手段とをさらに備えることを特徴とする請求項1〜5のいずれか1項に記載の角度検出装置。
【請求項7】
前記複数のセンサは複数のホール素子であることを特徴とする請求項1〜6のいずれか1項に記載の角度検出装置。
【請求項8】
モータのコイル端子に周期的に変化する駆動電圧を印加してモータを回転駆動するモータ駆動装置であって、
請求項1〜7のいずれか1項に記載の角度検出装置を備えることを特徴とするモータ駆動装置。
【請求項9】
前記複数のセンサはモータの回転子の近傍に配置され、前記複数のセンサの出力信号に基づいてモータを転流駆動することを特徴とする請求項8に記載のモータ駆動装置。
【請求項10】
請求項8又は9に記載のモータ駆動装置を備えることを特徴とする画像形成装置。
【請求項1】
モータの回転子の回転角度に応じて正弦波状に変化する正弦波信号であって、互いの配置位置により位相の異なる正弦波信号を出力する複数のセンサと、
少なくとも2つの前記正弦波信号同士を相互演算した結果により表されるベクトルを生成するベクトル生成手段と、
前記ベクトルと複数の位相を有する基準正弦波とを演算することにより、前記ベクトルを回転させるベクトル回転手段と、
前記ベクトル回転手段を用いて、前記ベクトルが所定位相になるまで前記ベクトルを順次回転させ、回転前の前記ベクトルと当該所定位相とがなす角度を前記モータの回転子の回転角度として検出する角度探索手段とを備える
ことを特徴とする角度検出装置。
【請求項2】
モータの回転子の回転角度に応じて正弦波状に変化する正弦波信号であって、互いの配置位置により位相の異なる正弦波信号を出力する複数のセンサと、
前記正弦波信号と、少なくとも2つの前記正弦波信号同士を相互演算した結果とにより表されるベクトルを生成するベクトル生成手段と、
前記ベクトルと複数の位相を有する基準正弦波とを演算することにより、前記ベクトルを回転させるベクトル回転手段と、
前記ベクトル回転手段を用いて、前記ベクトルが所定位相になるまで前記ベクトルを順次回転させ、回転前の前記ベクトルと当該所定位相とがなす角度を前記モータの回転子の回転角度として検出する角度探索手段とを備える
ことを特徴とする角度検出装置。
【請求項3】
前記ベクトル生成手段は、互いに120°の角をなす座標軸による座標系から互いに90°の角をなす座標軸による座標系への座標変換を行う
ことを特徴とする請求項1又は2に記載の角度検出装置。
【請求項4】
検出した回転角度に基づいて、前記モータの回転子の回転角度に応じて変化する1/4周期の位相差を有する2相のパルス信号を生成する2相パルス生成手段をさらに備えることを特徴とする請求項1〜3のいずれか1項に記載の角度検出装置。
【請求項5】
前記角度探索手段は、2分法により回転前の前記ベクトルと前記所定位相とがなす角度を検出することを特徴とする請求項1〜4のいずれか1項に記載の角度検出装置。
【請求項6】
前記正弦波信号の振幅を検出する振幅検出手段と、検出した振幅に基づいて、前記正弦波信号の振幅を所望の値に調整する振幅調整手段とをさらに備えることを特徴とする請求項1〜5のいずれか1項に記載の角度検出装置。
【請求項7】
前記複数のセンサは複数のホール素子であることを特徴とする請求項1〜6のいずれか1項に記載の角度検出装置。
【請求項8】
モータのコイル端子に周期的に変化する駆動電圧を印加してモータを回転駆動するモータ駆動装置であって、
請求項1〜7のいずれか1項に記載の角度検出装置を備えることを特徴とするモータ駆動装置。
【請求項9】
前記複数のセンサはモータの回転子の近傍に配置され、前記複数のセンサの出力信号に基づいてモータを転流駆動することを特徴とする請求項8に記載のモータ駆動装置。
【請求項10】
請求項8又は9に記載のモータ駆動装置を備えることを特徴とする画像形成装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8a】
【図8b】
【図8c】
【図8d】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8a】
【図8b】
【図8c】
【図8d】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【公開番号】特開2013−108971(P2013−108971A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2012−194012(P2012−194012)
【出願日】平成24年9月4日(2012.9.4)
【出願人】(000006747)株式会社リコー (37,907)
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成24年9月4日(2012.9.4)
【出願人】(000006747)株式会社リコー (37,907)
【Fターム(参考)】
[ Back to top ]