
角度検出装置、操舵装置、作業車両、および角度検出方法
【課題】角検出精度を向上させることができる角度検出装置および角度検出方法の提供。
【解決手段】互いに位相差を有するsin信号およびcos信号を出力する角度センサと、sin、cos信号の信号変化率に基づいて、sin、cos信号の一方を選択して角度検出に用いる制御部と、を備え、制御部は、第1、第2信号の一方の信号変化率(電圧勾配)が他方の信号変化率(電圧勾配)よりも小さくなる場合に、選択される信号を前記一方から前記他方へと切り替える。このように2つの信号を選択的に用いることで、変曲点に近く分解能が悪い領域の信号値が角度検出に用いられることが回避されるので、角検出精度を向上させることができる。信号変化率の大小は、sin、cos信号の電圧に基づいて判断することができる。
【解決手段】互いに位相差を有するsin信号およびcos信号を出力する角度センサと、sin、cos信号の信号変化率に基づいて、sin、cos信号の一方を選択して角度検出に用いる制御部と、を備え、制御部は、第1、第2信号の一方の信号変化率(電圧勾配)が他方の信号変化率(電圧勾配)よりも小さくなる場合に、選択される信号を前記一方から前記他方へと切り替える。このように2つの信号を選択的に用いることで、変曲点に近く分解能が悪い領域の信号値が角度検出に用いられることが回避されるので、角検出精度を向上させることができる。信号変化率の大小は、sin、cos信号の電圧に基づいて判断することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、角度検出装置、操舵装置、作業車両、および角度検出方法に関する。
【背景技術】
【0002】
フォークリフトなどの各種作業車両に、電動パワーステアリング(EPS;Electric Power Steering)装置などの操舵装置が搭載されている。電動パワーステアリング装置は、ハンドルの回転角を検出するハンドル角センサと、タイヤ角(タイヤ切れ角)を検出するタイヤ角センサとを備えている。これらのセンサでそれぞれ検出されたハンドル角とタイヤ角との差分に基づいて、タイヤの方向を変えるパワーステアリングモータのモータ指令値が決まり、モータ速度検出値を加味したトルク指令値に基づいて、電動パワーステアリングモータの制御が行われている。
【0003】
このような電動パワーステアリング装置においては、ハンドル角とタイヤ角とのそれぞれの位置関係にずれが生じる場合があり、そのような場合には、運転者に違和感を与えてしまう。この違和感を低減するために、操作時にハンドルを空転させることでハンドル角を補正することが知られている(特許文献1)。特許文献1に記載された作業車両は、ハンドル角補正手段を備え、低速走行時と比べて、高速走行時の単位時間当たりの補正量を少なくすることによって、運転者の違和感を低減している。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平10−287251号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記のようにハンドル角とタイヤ角との位置関係のずれを補正することにより、運転者の違和感をある程度低減できるものの、ハンドルが空転するため運転者に少なからず違和感を与えてしまう。このようにハンドル角とタイヤ角との位置関係のずれを補正するのではなく、ハンドル角およびタイヤ角のそれぞれの検出精度を向上させることによって操作性を向上させることが望まれる。
【0006】
ところで、ハンドル角とタイヤ角とのそれぞれの検出に際しては、コイルを内蔵する回転角センサが用いられる。このセンサから出力されるsin信号を用いて角度検出が行われるが、sin信号の変曲点近傍、すなわち信号変化率の小さい領域における分解能が低いため、変曲点近傍の領域では信号の僅かな変動に対して検出角度が大きく変化する場合があるなど、検出精度が悪化するおそれがある。
【0007】
本発明は、このような技術的課題に基づいてなされたもので、角検出精度を向上させることができる角度検出装置、この角度検出装置を備え操作性を向上させることが可能な操舵装置、この操舵装置を備えた作業車両、および角度検出方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
かかる目的のもと、本発明の第1の角度検出装置は、互いに位相差を有する2つのセンサ信号である第1信号および第2信号を出力する角度センサと、第1、第2信号の信号変化率に基づいて、第1、第2信号の一方を選択して角度検出に用いる制御部と、を備え、制御部は、第1、第2信号の一方の信号変化率が他方の信号変化率よりも小さくなる場合に、選択される信号を一方から他方へと切り替えることを特徴とする。
【0009】
本発明によれば、第1、第2信号のうち信号変化率が相対的に大きい方が選択され、信号変化率が小さい領域の信号値が角度検出に用いられないので、常に高い分解能を維持しながら角度を検出できる。これにより、角検出精度を向上させることができる。
【0010】
なお、「第1、第2信号の一方の信号変化率が他方の信号変化率よりも小さくなる場合」は、「第1、第2信号の一方の信号変化率が他方の信号変化率以下となる場合」と等価である。このように、閾値の読み方(ここでは、第1、第2信号の相互の信号変化率の用い方)が違うに過ぎない構成は、本発明に含まれる。以降において、「より小さい(未満)」、「より大きい(超)」、「以上」、「以下」についても同様に取り扱う。
【0011】
また、本発明の第2の角度検出装置は、互いに位相差を有する2つのセンサ信号である第1信号および第2信号を出力する角度センサと、第1、第2信号の信号変化率に基づいて、第1、第2信号の少なくとも一方を選択して角度検出に用いる制御部と、を備え、制御部は、第1、第2信号の一方の信号変化率が基準値よりも小さくかつ他方の信号変化率が基準値よりも大きい場合に他方を選択することを特徴とする。
【0012】
なお、「第1、第2信号の一方の単位時間あたりの信号変化量が基準値よりも小さくかつ他方の単位時間あたりの信号変化量が基準値よりも大きい」は、「第1、第2信号の一方の単位時間あたりの信号変化量が基準値以下でかつ他方の単位時間あたりの信号変化量が基準値以上」と等価である。
【0013】
本発明によれば、第1、第2信号の信号変化率と基準値との比較により、第1、第2信号のうち信号変化率が相対的に大きい方が選択され、信号変化率が小さい領域の信号値が角度検出に用いられないので、常に高い分解能を維持しながら角度を検出できる。これにより、角検出精度を向上させることができる。
【0014】
ここで、基準値が、第1、第2信号の勾配の大小逆転時に対応した値ではなく、逆転時から外れた値である場合には、第1、第2信号の信号変化率のいずれも基準値より小さいか、あるいは第1、第2信号の変化量のいずれも基準値よりも大きい場合がある。この場合には、第1、第2信号のいずれか一方を選択するか、あるいは第1、第2信号の両方を選択して平均値を求めることなどによって、角度検出を行うことができる。さらには、角度検出装置により得られた前回の検出角度を今回の検出角度に決定することもできる。
【0015】
また、第1、第2信号のいずれの変化量も基準値より小さいか、あるいは第1、第2信号の変化量のいずれも基準値よりも大きい場合に第1、第2信号の平均値を角度検出に用いることにより、オフセット電圧等の影響で第1、第2信号の位相差や振幅がずれている場合に生じる検出角度の誤差を小さくできる。すなわち、信号のオフセットやシフト等の原因となる温度変化や電圧変動に関する信頼性を向上させることができる。
【0016】
なお、基準値が、第1、第2信号の勾配大小の逆転時に対応した値である場合には、第1、第2信号の変化量のいずれも基準値より小さい、あるいは第1、第2信号の変化量のいずれも基準値よりも大きいことが生じ得ず、第1、第2信号の変化量が等しい場合を除いて必ず、第1、第2信号のうち一方の変化量が基準値より小さく、他方の変化量が基準値より大きくなる。すなわち、基準値が第1、第2信号の勾配大小の逆転時に対応した値である場合の本発明においては、第1、第2信号の切り替えを行う上述の角度検出装置の発明と同様に、第1、第2信号の一方の変化量が他方の変化量よりも小さくなる場合に、センサ信号の選択が一方から他方へと切り替えられる。第1、第2信号の変化量が等しい場合には、第1、第2信号のいずれが選択されてもよい。
【0017】
本発明の第3の角度検出装置は、互いに位相差を有する2つのセンサ信号である第1信号および第2信号を出力する角度センサと、第1、第2信号の少なくとも一方を選択して角度検出に用いる制御部と、を備え、制御部は、制御部により前回求められた検出角度が第1角度範囲である場合に第1信号を選択し、第2角度範囲である場合に第2信号を選択することを特徴とする。
【0018】
本発明によれば、前回の検出角度に応じて、第1、第2信号のうち信号変化率が相対的に大きい方を選択することが可能となるので、常に高い分解能を維持しながら角度を検出できる。これにより、角検出精度を向上させることができる。
第1、第2角度範囲は、第1、第2信号の信号変化率や、第1、第2信号の位相差などに基づいて決めることができる。
【0019】
本発明の角度検出装置においては、検出角度が第1、第2角度範囲のいずれでもない第3角度範囲である場合に、制御部は、第1、第2信号の両方を選択し、これらの信号の値がそれぞれ変換された角度を検出角度に応じて第3角度範囲内で重み付けして用いることが好ましい。
【0020】
本発明によれば、第1角度範囲と第2角度範囲との間に想定された第3角度範囲において、第1、第2信号に対応する各角度が重み付けされて角度検出に用いられるので、オフセット、シフト、波形の歪み等の影響で検出角度が不連続となって角度飛び(検出角度のジャンプ)が生じることを防止できる。例えば、オフセット電圧等の影響で第1、第2信号の位相差や振幅がずれている場合に第1、第2信号のいずれか一方に基づいて検出角度が算出されると、検出角度の誤差が大きくなる角度範囲が発生し、この角度範囲と、誤差が無いあるいは誤差が小さい角度範囲との間で検出角度が不連続となる。そこで、第1、第2信号の両方を第3角度範囲において重み付けして誤差を抑制することにより、不連続で段差状の特性が誤差の無い線形特性に近づくように補正できる。すなわち、オフセット電圧等に起因する角度飛びを解決しつつ、角検出精度を向上させることができる。
【0021】
本発明の角度検出装置においては、制御部は、センサ信号が示す電圧の大小に基づいてセンサ信号の信号変化率の大小を判断することが好ましい。
例えば、センサ信号の電圧が基準値以上の場合に信号変化率が小さい(または大きい)、あるいはセンサ信号の電圧が基準値以下の場合に変化量が小さい(または大きい)と判断することができる。
【0022】
本発明によれば、信号変化率を算出することなく、センサ信号が示す電圧に基づいて直ちに信号選択を行うことができる。これにより、制御部の処理を簡略化できる。また、角度検出周期を短縮できるので、本発明の角度検出装置を備えた操舵装置の操作応答性を向上させることができる。
なお、センサ信号が電流値を示す場合には、その電流の大小に基づいてセンサ信号の信号変化率の大小を判断することが好ましい。
【0023】
本発明の角度検出装置においては、センサ信号の信号値と角度との対応関係を示す角度変換情報を記憶する記憶部を備え、制御部は、選択されたセンサ信号の信号値に対応する角度を角度変換情報から取得することが好ましい。
【0024】
本発明によれば、角度変換情報を用いることにより、センサ信号の信号値(例えば、電圧)の角度への変換を、角度検出する都度行うことを不要にできるので、処理の簡略化および操舵応答性の向上を図ることができる。
【0025】
以上説明した角度検出装置は、種々の車両の操舵装置に適用できる。この操舵装置は、作業車両に適用されることが好ましい。このような操舵装置、作業車両によれば、前述の角度検出装置の発明と同様の作用および効果を享受できる。
【0026】
本発明の角度検出方法は、互いに位相差を有し一方が選択されて角度検出に用いられる2つのセンサ信号である第1信号および第2信号の一方の信号変化率が他方の信号変化率よりも小さくなる場合に、選択される信号を一方から他方へと切り替える信号選択ステップを有することを特徴とする。
【0027】
本発明の第2の角度検出方法は、互いに位相差を有し少なくとも一方が選択されて角度検出に用いられる2つのセンサ信号である第1信号および第2信号の一方の信号変化率が基準値よりも小さくかつ他方の信号変化率が基準値よりも大きい場合に、他方を選択することを特徴とする。
【0028】
本発明の第3の角度検出方法は、互いに位相差を有する2つのセンサ信号である第1信号および第2信号の少なくとも一方を選択して角度検出に用いる角度検出方法であって、この方法により前回求められた検出角度が第1角度範囲である場合に、第1信号を選択し、他の角度範囲である場合に第2信号を選択する信号選択ステップを有することを特徴とする。
【0029】
これらの発明によっても、前述した角度検出装置の発明と同様に、第1、第2信号のうち信号変化率が相対的に大きい方が選択され、高い分解能を維持しながら角度を検出できるので、角検出精度を向上させることができる。
【発明の効果】
【0030】
本発明によれば、第1、第2信号を選択的に用いることで、分解能が低い変曲点近傍領域の信号値に基づいて角度が検出されることが回避されるので、常に高い分解能を維持できる。これにより、角検出精度を向上できるとともに、操舵操作性を向上させることができる。
【図面の簡単な説明】
【0031】
【図1】第1実施形態に係る作業車両の一例としてのフォークリフトを示す外観側面図である。
【図2】第1実施形態に係る操舵装置が行う制御を説明するための図である。
【図3】第1実施形態に係る制御装置の内部構成を示すブロック図である。
【図4】前記制御装置が有する記憶部に格納された角度変換テーブルを示す図である。
【図5】前記制御装置が有する検出角度算出部によって処理されるsin信号およびcos信号を示す図である。
【図6】前記検出角度算出部によって行われる角度検出方法の処理を示すフローチャートである。
【図7】第2実施形態における角度検出について説明するため、オフセットした信号を示す図である。
【図8】図7とは異なる態様のオフセットが生じた信号を示す図である。
【図9】オフセットが生じた場合の検出誤差を示す図である。
【図10】第2実施形態に係る検出角度算出部によって処理されるsin信号およびcos信号を示す図である。
【図11】検出角度におけるsin信号成分とcos信号成分との配分割合を示す図である。
【図12】前記検出角度算出部によって行われる角度検出方法の処理を示すフローチャートである。
【図13】本発明の変形例における角度検出を説明するための図である。
【発明を実施するための形態】
【0032】
以下、添付図面に示す実施の形態に基づいてこの発明を詳細に説明する。
【0033】
〔第1実施形態〕
図1〜図6を参照して本発明の第1実施形態について説明する。
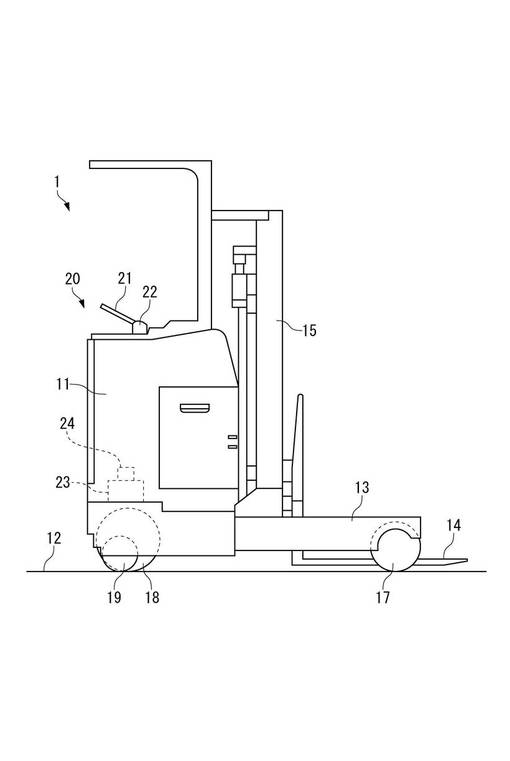
図1は、本実施の形態に係るリーチ型のフォークリフト1の外観側面図である。フォークリフト1は、倉庫内や工場内などでの荷物の運搬に用いられる作業車両であり、車体前部には、車体11から前方に向かって延出された上で路面12と平行に配置された左右一対のストラドルアーム13と、昇降動作するフォーク14を支持しながらストラドルアーム13に沿って進退動作するマスト15とが配備されている。また、この車体前部、つまり、各ストラドルアーム13の先端部には左右一対の前輪17が配設されていると共に、車体後部には左右一対の駆動輪18及び従動輪19が配設されており、駆動輪18は走行駆動用の他に操舵用としても機能する。
なお、フォークリフト1は本発明の作業車両の例示に過ぎず、その他の物流車両、農業車両、産業車両などにも本発明を適用できる。
【0034】
フォークリフト1は、電動パワーステアリング(EPS)と呼ばれる操舵装置20を備えている。操舵装置20は、水平方向に回動可能なハンドル21と、ハンドル21の回動軸に設けられてハンドルの角度(ハンドル角)を検出するハンドル角センサ22と、駆動輪18を方向転換させるEPSモータ23と、EPSモータ23に設けられて駆動輪18のタイヤ向きを示す角度(タイヤ切れ角あるいは操舵角)を検出するタイヤ角センサ24と、CPUなどを含む制御装置30(図3)とを備えている。EPSモータ23は、後輪タイヤをタイヤ角方向に回動させる。ここで、本発明の角度検出装置は、ハンドル角センサ22、タイヤ角センサ24、および制御装置30を含んで構成されている。
【0035】
ハンドル角センサ22およびタイヤ角センサ24は、コイルを含んで構成される回転角センサであり、ハンドル角センサ22およびタイヤ角センサ24のそれぞれから、二相のセンサ信号、すなわちsin信号およびcos信号が制御装置30に向けて出力される。これらの信号は、ハンドル21のハンドル角および駆動輪18のタイヤ角に対応する電圧値として出力される。
【0036】
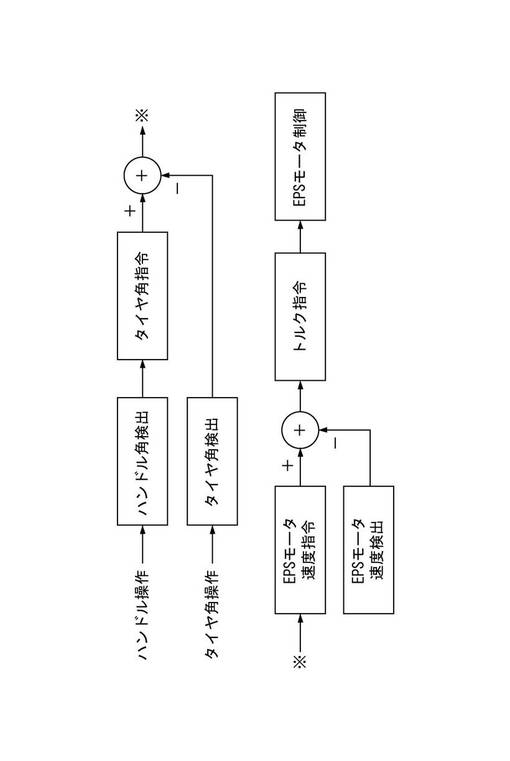
図2は、操舵装置20が行う制御を説明するための図である。ハンドル角センサ22およびタイヤ角センサ24により、ハンドル角およびタイヤ角がそれぞれ検出されると、検出されたハンドル角に対応するタイヤ角指令値と、検出されたタイヤ角との差分に基づいて、EPSモータ速度指令値が演算される。さらに、EPSモータ速度指令値と、EPSモータの速度検出値との差分に基づいて、トルク指令が演算される。このトルク指令をEPSモータ23に入力することで、EPSモータ23が制御される。これらの一連の処理により、操舵装置20全体の制御が行われている。
【0037】
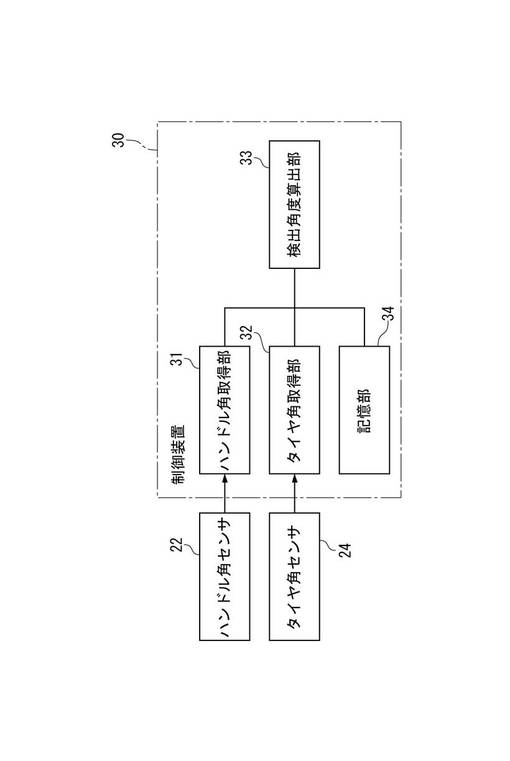
図3は、制御装置30の内部構成を示すブロック図である。制御装置30は、ハンドル角センサ22から信号を受け取るハンドル角取得部31と、タイヤ角センサ24から信号を受け取るタイヤ角取得部32と、ハンドル角取得部31およびタイヤ角取得部32がそれぞれ取得した信号を処理する制御部としての検出角度算出部33と、記憶部34とを有している。
なお、本実施形態では、ハンドル角とタイヤ角とのそれぞれの処理に共通の検出角度算出部33が用いられるが、ハンドル角に係る検出角度算出部とタイヤ角に係る検出角度算出部とが別々に設けられていてもよい。
【0038】
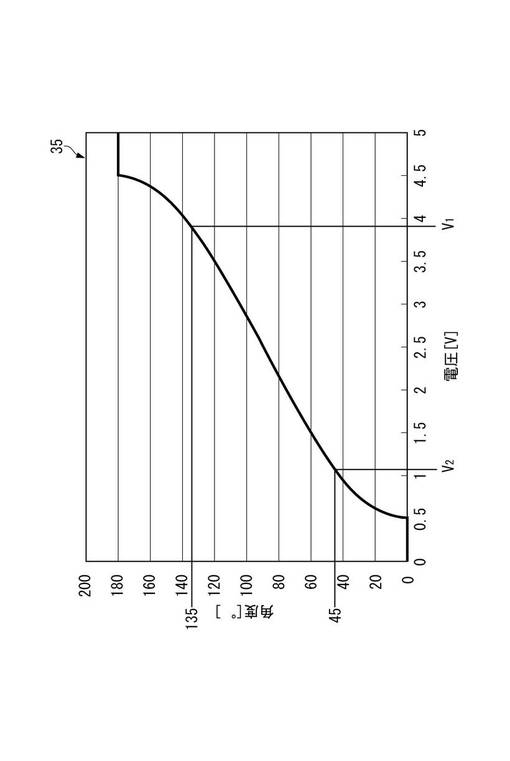
図4は、記憶部34に格納された角度変換情報の一例としての角度変換テーブル35を示す。角度変換テーブル35は、ハンドル角センサ22およびタイヤ角センサ24のそれぞれの事前試験結果に基づいて作成されたものであり、各センサに対応する入力信号を角度に変換するために用いられる。角度変換テーブル35には、ハンドル角センサ22およびタイヤ角センサ24のそれぞれを動作させて、取得部31あるいは取得部32を介して制御装置30に入力された入力信号の信号電圧と角度(ハンドル角およびタイヤ角)との関係がプロットされている。
【0039】
本実施形態の角度変換テーブル35は、ハンドル角センサ22とタイヤ角センサ24とに共通であるが、ハンドル角センサ22用の角度変換テーブルと、タイヤ角センサ24用の角度変換テーブルとがそれぞれ設けられていてもよい。
【0040】
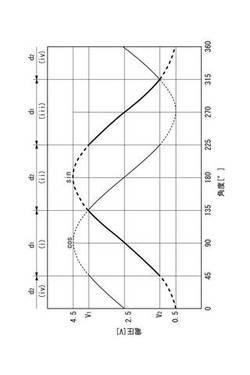
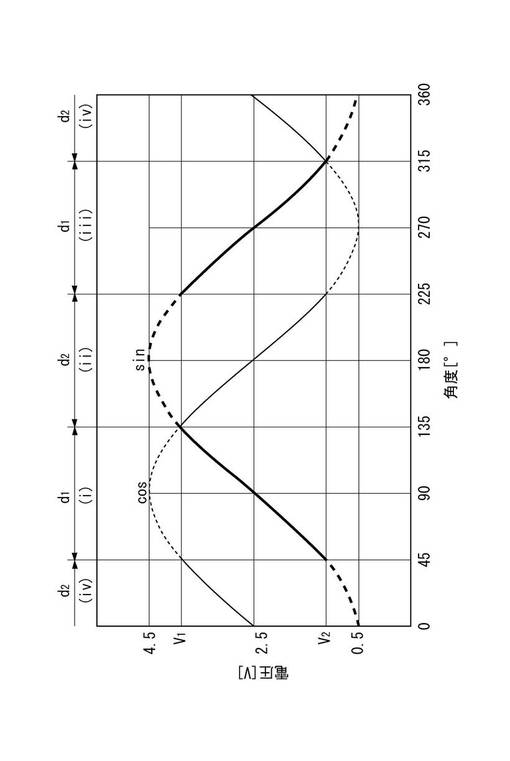
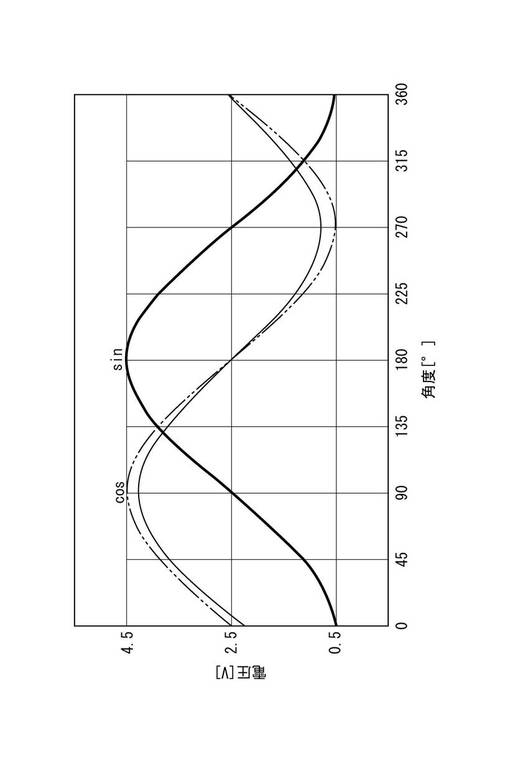
図5は、ハンドル角取得部31およびタイヤ角取得部32が取得した信号に対する検出角度算出部33の処理について説明するための図である。ハンドル角取得部31およびタイヤ角取得部32のそれぞれから、第1信号としてのsin信号および第2信号としてのcos信号が検出角度算出部33に送られる。図5に、sin信号を太線で示し、cos信号を細線で示した。ハンドル角取得部31が取得したsin信号およびcos信号はそれぞれ、ハンドル21の角度に対応する値を示し、タイヤ角取得部32が取得したsin信号およびcos信号はそれぞれ、駆動輪18の切れ角に対応する値を示す。ハンドル21を操作して操舵方向を次第に変化させると、図5のsin信号およびcos信号の波形が得られる。すなわち、操舵方向が直進の場合に(操舵角0°)、図5に示した中心角度180°を示すsin、cos信号がハンドル角センサ22およびタイヤ角センサ24から出力される。この直進の状態からハンドル21を一方の側に全部回すと、360°を示すsin、cos信号が出力され、ハンドル21を他方の側に全部回すと、0°を示すsin、cos信号が出力される。
【0041】
sin信号とcos信号とは、同様の振幅および周期を有し、相対的に90°の位相差を有する。図5の縦軸は信号電圧を示す。本実施形態のsinおよびcos信号のピーク値−ピーク値は0.5Vから4.5Vまでである。この信号電圧はあくまで、sin、cos信号の電圧の一例である。なお、sin、cos信号の位相差が90°から少しずれていたり、周期が少し違っていてもよい。sin,cos信号の振幅は違っていてもよい。
【0042】
sin信号およびcos信号にはそれぞれ、温度変化による抵抗値の変化や、取得部31,32による電圧変換などによる影響により、例えばsin(θ+α)、cos(θ+β)のように位相差が加わる場合があるため、sin信号およびcos信号の位相の遅れ進みの関係が図5に示したものとは逆になる場合がある。その場合の処理は、以降の説明において、sinとcosとを読み替えることで説明できる。
【0043】
検出角度算出部33は、sin信号およびcos信号を用いて、A/D変換(analog to digital conversion)のためのサンプリングを実施する。ここで、例えばsin信号カーブを所定のサンプリング周期(例えば10ms)で複数点読み取ってディジタル信号を生成した場合には、sin信号の変曲点近傍で分解能の低さから検出精度が悪化するおそれがあるため、sin信号の変曲点近傍では、sin信号と同じく角度を示すもう一つの信号であるcos信号を角度検出に用いる。これにより、常に高い分解能を維持しながら角度を検出できる。すなわち、信号変化率(信号量を角度で微分したときの勾配であり、本実施形態では電圧勾配)に応じて、sin信号およびcos信号の一方が選択されて角度検出に用いられる。
【0044】
第1、第2信号が角度検出に用いられるとは、その信号の値が検出角度(サンプリング点の値)を決定するために読み取られる場合をいう。その信号の値が他の信号の値や基準値との比較に用いられるに過ぎない場合には、その信号が角度検出に用いられるとは言わないものとする。
なお、本実施形態では、信号変化率に応じてsin信号およびcos信号の一方を選択する際に、信号電圧と基準値とを比較している。すなわち、信号電圧と基準値との比較結果に応じて、sin信号およびcos信号の一方が選択される。信号電圧と比較される基準値としては、第1基準値V1と第2基準値V2とが用いられる。これら第1、第2基準値V1,V2は、sin、cos信号の振幅中心に対して対称に決められることが好ましい。本実施形態の第1、第2基準値V1,V2は、振幅中心の2.5Vから等しく離れた3.914V、1.086Vにそれぞれ設定されている。
【0045】
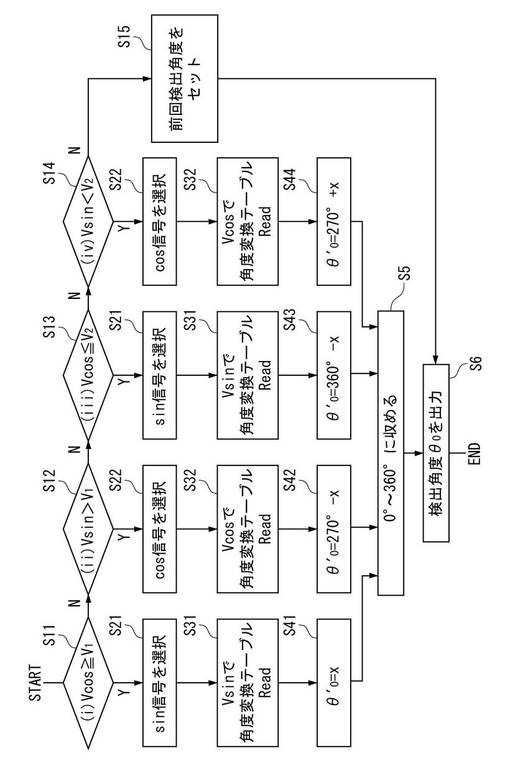
図6は、検出角度算出部33によって行われる角度検出方法の処理を示すフローチャートである。
検出角度算出部33は、信号電圧と基準値との比較結果に応じて場合分けを行い(信号電圧判定ステップS11〜14)、sin信号およびcos信号のいずれを選択するかを決定する(信号選択ステップS21,S22)。
【0046】
例えば、cos信号の電圧Vcosが第1基準値V1(図5)以上である場合(ステップS11でY)、すなわち図5の(i)の角度範囲においては、角度検出に用いる信号としてsin信号が選択される(ステップS21)。そしてsin信号の電圧Vsinで角度変換テーブル35を参照してVsinを角度xに変換し(ステップS31)、その角度xについて「θ´0=x」の演算を行い、計算角度θ´0を得る(ステップS41)。
【0047】
また、sin信号の電圧Vsinが第1基準値V1(図5)を超えている場合(ステップS12でY)、すなわち図5の(ii)の角度範囲においては、cos信号が選択される(ステップS22)。そしてcos信号の電圧Vcosで角度変換テーブル35を参照してVcosを角度xに変換し(ステップS32)、その角度xについて「θ´0=270°−x」の演算を行い、計算角度θ´0を得る(ステップS42)。
【0048】
あるいは、cos信号の電圧Vcosが第2基準値V2(図5)以下である場合(ステップS13でY)、すなわち図5の(iii)の角度範囲においては、sin信号が選択される(ステップS21)。そしてsin信号の電圧Vsinで角度変換テーブル35を参照してVsinを角度xに変換し(ステップS31)、その角度xについて「θ´0=360°−x」の演算を行い、計算角度θ´0を得る(ステップS43)。
【0049】
さらに、sin信号の電圧Vsinが第2基準値V2(図5)未満である場合(ステップS14でY)、すなわち図5の(iv)の角度範囲においては、cos信号が選択される(ステップS22)。そしてcos信号の電圧Vcosで角度変換テーブル35を参照してVcosを角度xに変換し(ステップS32)、その角度xについて「θ´0=270°+x」の演算を行い、計算角度θ´0を得る(ステップS44)。
【0050】
なお、sin、cos信号の位相差や振幅等が図5に示すような関係である場合には、ステップS11〜S14のいずれかでYとなるため、ステップS15は行われない。
【0051】
上記のように第1、第2基準値V1,V2に基づいてsin,cos信号の一方が選択されるため、角度変換テーブル35(図4)を参照するステップS31,S32では第2基準値V2超、および第1基準値V1未満の値のみが参照される。すなわち、第2基準値V2以下、あるいは第1基準値V1以上である電圧分解能が低い領域の値は参照されない。
以上の処理においては、sin信号およびcos信号が共通の角度変換テーブル35によって角度に変換されるため、(i)〜(iv)の角度範囲によって異なるsin、cos各信号の増減に応じた演算が行われる。
【0052】
検出角度算出部33は、上記の計算角度θ´0を0°〜360°の範囲に収め(ステップS5)、検出角度θ0として出力する(ステップS6)。このステップS6では、例えば計算角度θ´0が405°の場合には、「45°」の検出角度θ0が出力される。すなわち、角度変換テーブル35から得られた角度xは所定の演算後、0°〜360°の範囲にマッピングされて出力される。
以上のように、検出角度算出部33がsin信号またはcos信号を読み取り、読み取った値を角度に変換し、その角度をsin信号/cos信号の別、および各信号の増減に応じて演算することにより、検出角度θ0が算出される。
【0053】
本実施形態における第1基準値V1(3.914V)は、図5におけるcos信号の位相角45°および135°のそれぞれに対応する信号電圧である。cos信号に90°遅れるsin信号について見れば、第1基準値V1は、cos信号の位相角135°および225°のそれぞれに対応する信号電圧である。また、本実施形態における第2基準値V2(1.086V)は、図5におけるcos信号の位相225°および315°のそれぞれに対応する信号電圧であり、sin信号について見れば、第2基準値V2はcos信号の位相315°および45°のそれぞれに対応する信号電圧である。
【0054】
このように決められた第1、第2基準値V1,V2に基づいて、検出角度算出部33は、角度90°毎に区切られた(i)〜(iv)の4つの角度範囲(図5)を設定している。これらの(i)〜(iv)の角度範囲は、sin信号が選択される第1角度範囲d1と、cos信号が選択される第2角度範囲d2との2種類に二分される。
ここで、図5の角度45°、135°、225°、315°のそれぞれの角度において、sin信号の電圧勾配とcos信号の電圧勾配との大小関係が逆転する。つまり、sin信号の電圧を角度で微分した電圧変化率をΔVsin、cos信号の電圧を角度で微分した電圧変化率をΔVcosとすると、(i)の角度範囲ではΔVsin>ΔVcosであるが、(ii)の角度範囲ではΔVcos>ΔVsinとなり、以下同様に、(iii)、(iv)の各角度範囲においてもΔVsinとΔVcosとの大小関係が切り替わる。
【0055】
検出角度算出部33は、(i)〜(iv)の各角度範囲において、角度検出に用いるものとして選択するsin信号およびcos信号を順次切り替えている。すなわち、第1角度範囲d1と第2角度範囲d2とが位相角90°毎に交互に配置されている。sin、cos信号の切り替えは、図5に実線で示した部分を辿るように行われる。
例えば、(i)の角度範囲ではsin信号が選択されるが(第1角度範囲)、(ii)の角度範囲では、図6のステップS12における信号電圧と第1基準値V1との比較により、sin信号に代えてcos信号が選択される(第2角度範囲)。上記のように、第1基準値V1はsin信号およびcos信号のそれぞれの電圧変化率ΔVsin,ΔVcosの大小が切り替わる角度を規定しており、(i)の角度範囲ではΔVsin>ΔVcosであったものが、sin信号とcos信号との交点を超えるとΔVsin<ΔVcosとなるので、ピーク電圧に近づき分解能が低くなったsin信号に代えて、電圧勾配が急峻であり分解能が相対的に高いcos信号が選択される。
以下同様に、(iii)、(iv)のそれぞれの角度範囲において、sin信号およびcos信号が切り替えられる。これにより、sin、cos信号それぞれの図5に破線で示した領域の信号値が角度検出には用いられないので、高い分解能を維持しながら角度を検出できる。
【0056】
なお、sin、cos信号の切り替えに用いられる指標は、上記のように信号電圧と比較される第1、第2基準値V1,V2に限らない。第1、第2基準値V1,V2は信号変化率を知るために使用可能な一つの物理量に過ぎない。すなわち、信号変化率が基準値よりも小さいか否かは、信号電圧と第1、第2基準値との比較によって決められていてもよいが、その他、sin、cos各信号の電圧勾配、電流勾配、および前回の検出角度などに基づいて決められていてもよい。
【0057】
図5および図6を参照して説明した以上のような処理を経て、ハンドル角センサ22およびタイヤ角センサ24のそれぞれのセンサ信号(sin信号およびcos信号)がA/D変換された検出角度θ0が得られる。この検出角度θ0は、操舵装置20が行う制御(図2)におけるハンドル角検出値およびタイヤ角検出値として扱われる。上述のように、sin信号およびcos信号が角度検出に選択的に用いられてハンドル角およびタイヤ角の検出精度が向上するので、ハンドル角検出値とタイヤ角検出値とのずれが生じにくくなる。すなわち、フォークリフト1の操作性を向上させることができる。
【0058】
〔第2実施形態〕
次に、図7〜図10を参照して本発明の第2実施形態について説明する。
上述したsin信号およびcos信号には、温度変化や電圧変動などによって電圧オフセット、位相シフト、波形の歪み等が生じる可能性がある。
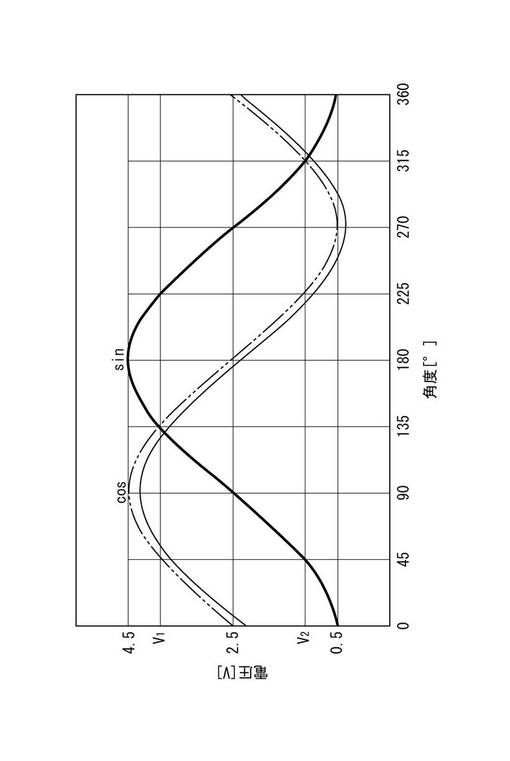
図7は、cos信号にオフセット電圧が生じている例を示す。図7において実線で示したcos信号は、図7に二点鎖線で示したcos信号(図5のcos信号と同様)に−0.1Vのオフセット電圧が加わったものである。このようなオフセットや、位相シフト、波形の歪み等がsin、cos信号の少なくとも一方に生じると、sin信号とcos信号との位相差や振幅の関係が図5に示した理想的な関係とは異なるものとなり、第1実施形態のようにsin、cos信号の一方を選択して角度検出に用いたのでは検出角度に誤差が生じてしまう。
【0059】
図7のように、−0.1Vのオフセット電圧がcos信号に加わった場合に第1実施形態の方法で検出角度を計算した際の誤差について説明する。このような誤差は、例えば、角度45°に相当する第1基準値V1(図5)の前後で生じる。これについて、40°〜49.2°の範囲で見ていく。
【0060】
40°では、sin信号の電圧Vsinが第2基準値V2(1.086V)より小さいため(図6のステップS14でY)、cos信号の電圧Vcosで角度変換テーブル35を参照して取得した角度xについて演算が行われる。オフセットを含むVcosが3.686Vなので角度xは126.4°であり、演算の結果、検出角度θ0が36.4°となる。すなわち、Vcosが−0.1V小さいため、真の角度40°に対して検出角度θ0が3.6°小さく計算される。
【0061】
次に、44.9°においても、sin信号の電圧Vsinが第2基準値V2より小さいので(図6のステップS14でY)、Vcosで角度変換テーブル35を参照して取得した角度xについて演算が行われる。オフセットのためVcosは3.812Vなので角度xは131.0°であり、検出角度θ0は41°となる。すなわち、真の角度44.9°に対して検出角度θ0が3.9°小さく計算される。
【0062】
45°のとき、オフセットがなければVsin=1.086V、Vcos=3.914Vであるが、−0.1Vのオフセット電圧によりVcosは3.814Vなので、ステップS11〜S14のいずれにも該当しない。このとき、ステップS15の処理により、前回の検出角度と同じ値が検出角度θ0として出力される。そして、−0.1Vのオフセット電圧を含むVcosが3.914Vとなる角度49.2°までの間、検出角度θ0が変化しないことになる。
【0063】
49.2°になると、Vsinが1.193V、Vcosが3.914Vとなるので、ステップS11でYとなり、選択される信号がcos信号からsin信号に切り替えられる。そして、sin信号で角度変換テーブル35を参照して取得した角度xについて演算する。この場合には、オフセットしていないsin信号により、真値49.2°と同じ正しい検出角度θ0が得られる。
【0064】
ここで、40°から45°未満の角度範囲においては、40°から45°に向かってcos信号の電圧勾配が小さくなる分、真値に対する検出角度の誤差が拡大する。また、45°以上49.2°未満の角度範囲においては、一定の検出角度θ0が出力される。そして、49.2°になった際に誤差がない検出角度θ0が出力される。すなわち、誤差がある角度範囲と誤差が無い角度範囲とが切り替わる際に検出角度θ0が不連続となる。すなわち、検出角度のジャンプ(角度飛び)が発生してしまう。
【0065】
上記では第1実施形態のように第1、第2基準値V1,V2によりsin、cos信号を切り替える場合の誤差発生について説明したが、検出角度θ0を記憶部34に保存し、この保存された前回の検出角度y0に基づいてsin,cos信号が選択される構成とした場合にも、検出角度の誤差が生じる。
図8は、図7とは異なる態様のオフセットがcos信号に加わった例を示す。センサに用いられた抵抗の値の温度変化による変化や、取得部31,32による分圧、昇圧などの処理により、オフセットの態様は図7、図8のように異なる場合がある。つまりオフセット電圧は一定ではない。図8に実線で示したcos信号に生じているオフセット電圧は、変曲点近傍に向かって大きくなる。
【0066】
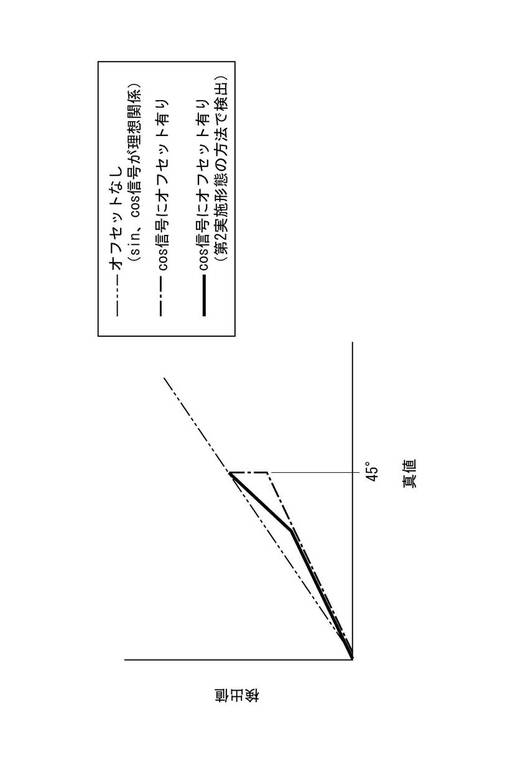
図9は、図8のようにオフセットが存在する場合に角度45°近傍で生じる誤差の一例を示す。図9の横軸は、検出されるべき角度の真値であり、縦軸は、検出角度算出部33が算出する検出角度である。図9の二点鎖線は、オフセットがなくsin、cos信号が理想関係にある状態を示し、この状態の場合には真値に対する検出角度の誤差がないが、図8の信号のようにオフセットがある場合には、図9の一点鎖線に示すように真値に対して誤差が生じる。
【0067】
この誤差について、前回の検出角度y0に基づいて信号が選択される場合を想定してより具体的に考えてみる。オフセットがない場合のsin、cos信号の電圧勾配に基づいて、前回の検出角度y0が図8の0°〜45°の範囲ではcos信号が選択されるように決められている。また、前回の検出角度y0が45°となる前後でcos信号からsin信号に選択信号が切り替えられる。この場合において0°〜45°の範囲でcos信号が選択されるとき、図8のcos信号のオフセット特性より、0°から90°に向かって、オフセットが無い場合のcos信号に対する実際のcos信号の電圧差が拡大するので、図9に示すように、真値に対する検出角度の誤差が拡大していく。そして、前回の検出角度が45°となりsin信号に切り替わった際に、オフセットなしのsin信号に基づいて正しい検出角度が出力される。このとき、検出角度が不連続となるので、図7を参照して説明した場合とほぼ同様に検出角度がジャンプする。
【0068】
以上のように検出角度がジャンプする問題を解決するために、本実施形態は、図9に太い実線で示したように、真値に対する検出角度の誤差を抑制する構成を採用している。すなわち、図9に一点鎖線で示したような誤差が大きく不連続な出力を、図9に二点鎖線で示した誤差のない状態に近づけるように補正する。
【0069】
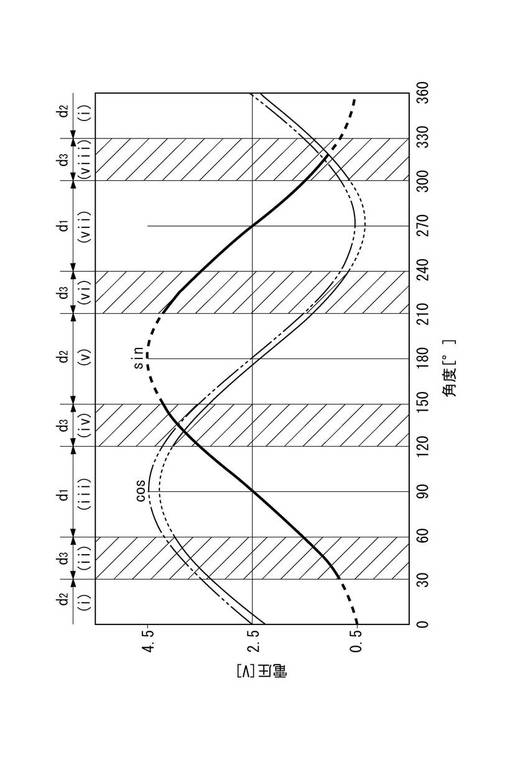
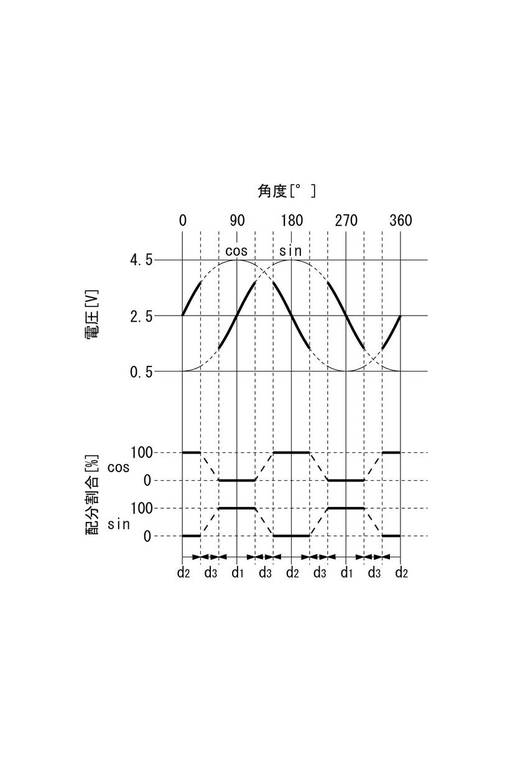
誤差抑制のため、本実施形態では図10に示すように、sin信号が選択される第1角度範囲d1と、cos信号が選択される第2角度範囲d2との間にsin、cos信号の両方が選択されて角度検出に用いられる第3角度範囲d3が設けられている。前回の検出角度y0が、第1角度範囲d1である場合にsin信号が選択され、第2角度範囲d2である場合にcos信号が選択され、第3角度範囲d3である場合にsin、cos信号の両方が選択され、これらの電圧がそれぞれ変換された角度が重み付けされて角度検出に用いられる。
【0070】
図11は、sin、cos信号の両方を角度検出に使用する上での配分割合を示す。sin、cos信号は、第3角度範囲d3内で比例配分される。
【0071】
以下、本実施形態における角度検出方法について説明する。
本実施形態では、検出角度の初期値を決めるにあたり、図6に示した第1実施形態のフローを用いる。図6のフローに基づいて検出角度θ0を決定し、この検出角度θ0を検出角度の初期値として出力する。この初期値は記憶部34に保存され、次回検出の際に読み込まれる。
2回目の検出以降は、図12に示す角度検出方法を用いる。
【0072】
図12は、本実施形態に係る角度検出方法の処理を示すフローチャートである。
本実施形態では、記憶部34から前回の検出角度y0を読み込み(ステップS16)、この検出角度y0に基づいて場合分けを行う。
【0073】
図10で60°≦y0<120°または240°≦y0<300°の場合には、前回の検出角度y0が第1角度範囲に該当するので(ステップS17でY)、sin信号を選択する(ステップS21)。そして、sin信号の電圧Vsinで角度変換テーブル35を参照して角度xを取得し(ステップS31)、Vsinの増減に応じて演算を行う(ステップS45)。このときの演算としては、60°≦y0<120°の場合には、θ´0=xを行い、240°≦y0<300°の場合には、θ´0=360°−xを行う。
【0074】
また、0°≦y0<30°または330°≦y0<360°、あるいは150°≦y0<210°の場合には、前回の検出角度y0が第2角度範囲に該当するので(ステップS18でY)、cos信号を選択する(ステップS22)。そして、cos信号の電圧Vcosで角度変換テーブル35を参照して角度xを取得し(ステップS32)、Vcosの増減に応じて演算を行う(ステップS46)。このときの演算としては、0°≦y0<30°または330°≦y0<360°の場合には、θ´0=270°+xを行い、150°≦y0<210°の場合には、θ´0=270−xを行う。
【0075】
さらに、30°≦y0<60°、120°≦y0<150°、210°≦y0<240°、300°≦y0<330°の場合には、前回の検出角度y0が第3角度範囲に該当するので(ステップS19)、sin、cos信号の両方を選択する(ステップS25)。そして、角度変換テーブル35をsin信号の電圧Vsinおよびcos信号の電圧Vcosでそれぞれ読んで角度xsinおよび角度xcosを取得する(ステップS35)。これらの角度xsinおよび角度xcosに対して次の演算を行う。
【0076】
30°≦y0<60°のとき、次式(1)の演算を行う。
【数1】

【0077】
上記の式(1)のように、sin、cos信号の値がそれぞれ変換された角度xsinおよび角度xcosが検出角度y0に応じて第3角度範囲d3(30°≦y0<60°である角度差30°の角度範囲)内で比例配分される。
ここで、図10を参照し、オフセットがない状態(二点鎖線のcos信号)とsin信号とを比較すると、30°≦y0<60°の中心値45°において、sin、cos両信号の電圧勾配の大小関係が逆転する。このような逆転点を含む角度範囲30°≦y0<60°において上記式(1)のような比例配分をすることにより、45°よりも小さい角度では電圧勾配が大きいcos信号の配分を大きく、逆に45°よりも大きい角度ではsin信号の配分を大きくして重み付けされることになる。このようにすることで、オフセット等が生じていても各信号の電圧勾配を反映した検出角度が得られるので、検出角度を連続的にできる。すなわち、検出角度がジャンプしない。以下に示す式(2)〜(4)についても同様である。
【0078】
120°≦y0<150°のとき、次式(2)の演算を行う。
【数2】
【0079】
210°≦y0<240°のとき、次式(3)の演算を行う。
【数3】
【0080】
300°≦y0<330°のとき、次式(4)の演算を行う。
【数4】
【0081】
以上のようにして計算角度θ´0を求めたら、この計算角度θ´0を0°〜360°の範囲に収め、検出角度θ0を得る(ステップS5)。さらに、この検出角度θ0を記憶部34に保存し(ステップS51)、出力する(ステップS6)。
本実施形態によれば、信号のオフセットやシフト等による検出角度の誤差を抑制できるので、オフセットやシフト等の原因となる温度変化や電圧変動に関する信頼性を向上させることができる。
【0082】
〔本発明の変形例〕
図13は、本発明の変形例における角度検出を説明するための図である。図13の例では、第1基準値V1よりも小さい第1基準値V1´、および第2基準値V2よりも大きい第2基準値V2´に基づいてsin、cos信号の選択を行っている。これらの第1、第2基準値V1´,V2´は、sin、cos信号の電圧勾配が逆転する角度(45°など)から外れた角度に対応しているが、これは意図的に決められているとは限らず、sin、cos信号のオフセットや位相シフト、波形の歪み等によってこのように電圧基準値がsin、cos信号の勾配逆転角度からずれる可能性がある。このように信号電圧の勾配が逆転する角度から電圧基準値がずれている場合には、次に示す方法で角度検出を行うことが好ましい。
【0083】
sin信号の電圧をVsin、cos信号の電圧をVcosとすると、V2´<Vsin<V1´であって、Vcos≧V1´でかつVcos≦V2´である場合(第1の場合)には、sin信号が選択される。図13の例では第1区間c1においてsin信号が選択される。
また、V2´<Vcos<V1´であって、Vsin≧V1´でかつVsin≦V2´である場合(第2の場合)には、cos信号が選択される。図13の例では第2区間c2においてcos信号が選択される。
【0084】
また、上記の第1の場合にも第2の場合にも該当しない第3の場合には、sin、cos信号の両方が選択される。図13の例では第3区間c3においてsin、cos信号の両方が選択される。第3の場合には、VsinおよびVcosのいずれもV2からV1までの範囲内である場合と、VsinおよびVcosのいずれもV2以下あるいはV1以上である場合とがある。これらの場合には、sin信号の電圧とcos信号の電圧との平均値によって角度変換テーブル35を読み、角度xを取得する。
【0085】
以上において、V2´<Vsin<V1´であることは、sin信号の信号変化率(電圧変化率)が電圧変化率を規定する変化率の基準値よりも小さいことに該当し、V2´<Vcos<V1´であることはcos信号の信号変化率が変化率の基準値よりも小さいことに該当する。また、Vsin≧V1´でかつVsin≦V2´であることはsin信号の信号変化率が変化率の基準値以上であることに該当し、Vcos>V1´でかつVcos<V2´であることはcos信号の信号変化率が変化率の基準値よりも大きいことに該当する。
したがって、V2´<Vsin<V1´であってVcos>V1´でかつVcos<V2´である場合(第1の場合)と、V2´<Vcos<V1´であって、Vsin>V1´でかつVsin<V2´である場合(第2の場合)とのいずれも、第1信号(sin信号)および第2信号(cos信号)の一方の信号変化率が基準値よりも小さくかつ他方の信号変化率が基準値よりも大きい場合に該当する。この場合には、信号変化率が相対的に大きい他方の信号が選択される。
【0086】
上述のように第1、第2基準値V1´、V2´がsin、cos信号の勾配の大小が逆転する角度(45°等)に対応する値から外れているため、第1、第2基準値V1,V2を基準値とする図5の場合とは異なり、sin、cos信号の信号変化率のいずれも基準値より小さいか、あるいは第1、第2信号の変化量のいずれも基準値よりも大きい場合がある。この場合が上記の第3の場合に該当する。
この第3の場合に、上述のようにsin、cos信号の電圧の平均値に基づいて角度を検出することにより、オフセット電圧等の影響でsin、cos信号の位相差や振幅がずれている場合に生じる検出角度の誤差を小さくできる。
【0087】
本発明の主旨を逸脱しない限り、上記実施の形態で挙げた構成を取捨選択したり、他の構成に適宜変更することが可能である。
【符号の説明】
【0088】
1 フォークリフト(作業車両)
11 車体
12 路面
13 ストラドルアーム
14 フォーク
15 マスト
17 前輪
18 駆動輪
19 従動輪
20 操舵装置
21 ハンドル
22 ハンドル角センサ(角度センサ)
23 EPSモータ
24 タイヤ角センサ(角度センサ)
30 制御装置
31 ハンドル角取得部
32 タイヤ角取得部
33 検出角度算出部(制御部)
34 記憶部
35 角度変換テーブル(角度変換情報)
d1 第1角度範囲
d2 第2角度範囲
d3 第3角度範囲
S21,S22 信号選択ステップ
V1 第1基準値
V2 第2基準値
Vcos cos信号の電圧
Vsin sin信号の電圧
y0 前回の検出角度
θ0 検出角度
【技術分野】
【0001】
本発明は、角度検出装置、操舵装置、作業車両、および角度検出方法に関する。
【背景技術】
【0002】
フォークリフトなどの各種作業車両に、電動パワーステアリング(EPS;Electric Power Steering)装置などの操舵装置が搭載されている。電動パワーステアリング装置は、ハンドルの回転角を検出するハンドル角センサと、タイヤ角(タイヤ切れ角)を検出するタイヤ角センサとを備えている。これらのセンサでそれぞれ検出されたハンドル角とタイヤ角との差分に基づいて、タイヤの方向を変えるパワーステアリングモータのモータ指令値が決まり、モータ速度検出値を加味したトルク指令値に基づいて、電動パワーステアリングモータの制御が行われている。
【0003】
このような電動パワーステアリング装置においては、ハンドル角とタイヤ角とのそれぞれの位置関係にずれが生じる場合があり、そのような場合には、運転者に違和感を与えてしまう。この違和感を低減するために、操作時にハンドルを空転させることでハンドル角を補正することが知られている(特許文献1)。特許文献1に記載された作業車両は、ハンドル角補正手段を備え、低速走行時と比べて、高速走行時の単位時間当たりの補正量を少なくすることによって、運転者の違和感を低減している。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平10−287251号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記のようにハンドル角とタイヤ角との位置関係のずれを補正することにより、運転者の違和感をある程度低減できるものの、ハンドルが空転するため運転者に少なからず違和感を与えてしまう。このようにハンドル角とタイヤ角との位置関係のずれを補正するのではなく、ハンドル角およびタイヤ角のそれぞれの検出精度を向上させることによって操作性を向上させることが望まれる。
【0006】
ところで、ハンドル角とタイヤ角とのそれぞれの検出に際しては、コイルを内蔵する回転角センサが用いられる。このセンサから出力されるsin信号を用いて角度検出が行われるが、sin信号の変曲点近傍、すなわち信号変化率の小さい領域における分解能が低いため、変曲点近傍の領域では信号の僅かな変動に対して検出角度が大きく変化する場合があるなど、検出精度が悪化するおそれがある。
【0007】
本発明は、このような技術的課題に基づいてなされたもので、角検出精度を向上させることができる角度検出装置、この角度検出装置を備え操作性を向上させることが可能な操舵装置、この操舵装置を備えた作業車両、および角度検出方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
かかる目的のもと、本発明の第1の角度検出装置は、互いに位相差を有する2つのセンサ信号である第1信号および第2信号を出力する角度センサと、第1、第2信号の信号変化率に基づいて、第1、第2信号の一方を選択して角度検出に用いる制御部と、を備え、制御部は、第1、第2信号の一方の信号変化率が他方の信号変化率よりも小さくなる場合に、選択される信号を一方から他方へと切り替えることを特徴とする。
【0009】
本発明によれば、第1、第2信号のうち信号変化率が相対的に大きい方が選択され、信号変化率が小さい領域の信号値が角度検出に用いられないので、常に高い分解能を維持しながら角度を検出できる。これにより、角検出精度を向上させることができる。
【0010】
なお、「第1、第2信号の一方の信号変化率が他方の信号変化率よりも小さくなる場合」は、「第1、第2信号の一方の信号変化率が他方の信号変化率以下となる場合」と等価である。このように、閾値の読み方(ここでは、第1、第2信号の相互の信号変化率の用い方)が違うに過ぎない構成は、本発明に含まれる。以降において、「より小さい(未満)」、「より大きい(超)」、「以上」、「以下」についても同様に取り扱う。
【0011】
また、本発明の第2の角度検出装置は、互いに位相差を有する2つのセンサ信号である第1信号および第2信号を出力する角度センサと、第1、第2信号の信号変化率に基づいて、第1、第2信号の少なくとも一方を選択して角度検出に用いる制御部と、を備え、制御部は、第1、第2信号の一方の信号変化率が基準値よりも小さくかつ他方の信号変化率が基準値よりも大きい場合に他方を選択することを特徴とする。
【0012】
なお、「第1、第2信号の一方の単位時間あたりの信号変化量が基準値よりも小さくかつ他方の単位時間あたりの信号変化量が基準値よりも大きい」は、「第1、第2信号の一方の単位時間あたりの信号変化量が基準値以下でかつ他方の単位時間あたりの信号変化量が基準値以上」と等価である。
【0013】
本発明によれば、第1、第2信号の信号変化率と基準値との比較により、第1、第2信号のうち信号変化率が相対的に大きい方が選択され、信号変化率が小さい領域の信号値が角度検出に用いられないので、常に高い分解能を維持しながら角度を検出できる。これにより、角検出精度を向上させることができる。
【0014】
ここで、基準値が、第1、第2信号の勾配の大小逆転時に対応した値ではなく、逆転時から外れた値である場合には、第1、第2信号の信号変化率のいずれも基準値より小さいか、あるいは第1、第2信号の変化量のいずれも基準値よりも大きい場合がある。この場合には、第1、第2信号のいずれか一方を選択するか、あるいは第1、第2信号の両方を選択して平均値を求めることなどによって、角度検出を行うことができる。さらには、角度検出装置により得られた前回の検出角度を今回の検出角度に決定することもできる。
【0015】
また、第1、第2信号のいずれの変化量も基準値より小さいか、あるいは第1、第2信号の変化量のいずれも基準値よりも大きい場合に第1、第2信号の平均値を角度検出に用いることにより、オフセット電圧等の影響で第1、第2信号の位相差や振幅がずれている場合に生じる検出角度の誤差を小さくできる。すなわち、信号のオフセットやシフト等の原因となる温度変化や電圧変動に関する信頼性を向上させることができる。
【0016】
なお、基準値が、第1、第2信号の勾配大小の逆転時に対応した値である場合には、第1、第2信号の変化量のいずれも基準値より小さい、あるいは第1、第2信号の変化量のいずれも基準値よりも大きいことが生じ得ず、第1、第2信号の変化量が等しい場合を除いて必ず、第1、第2信号のうち一方の変化量が基準値より小さく、他方の変化量が基準値より大きくなる。すなわち、基準値が第1、第2信号の勾配大小の逆転時に対応した値である場合の本発明においては、第1、第2信号の切り替えを行う上述の角度検出装置の発明と同様に、第1、第2信号の一方の変化量が他方の変化量よりも小さくなる場合に、センサ信号の選択が一方から他方へと切り替えられる。第1、第2信号の変化量が等しい場合には、第1、第2信号のいずれが選択されてもよい。
【0017】
本発明の第3の角度検出装置は、互いに位相差を有する2つのセンサ信号である第1信号および第2信号を出力する角度センサと、第1、第2信号の少なくとも一方を選択して角度検出に用いる制御部と、を備え、制御部は、制御部により前回求められた検出角度が第1角度範囲である場合に第1信号を選択し、第2角度範囲である場合に第2信号を選択することを特徴とする。
【0018】
本発明によれば、前回の検出角度に応じて、第1、第2信号のうち信号変化率が相対的に大きい方を選択することが可能となるので、常に高い分解能を維持しながら角度を検出できる。これにより、角検出精度を向上させることができる。
第1、第2角度範囲は、第1、第2信号の信号変化率や、第1、第2信号の位相差などに基づいて決めることができる。
【0019】
本発明の角度検出装置においては、検出角度が第1、第2角度範囲のいずれでもない第3角度範囲である場合に、制御部は、第1、第2信号の両方を選択し、これらの信号の値がそれぞれ変換された角度を検出角度に応じて第3角度範囲内で重み付けして用いることが好ましい。
【0020】
本発明によれば、第1角度範囲と第2角度範囲との間に想定された第3角度範囲において、第1、第2信号に対応する各角度が重み付けされて角度検出に用いられるので、オフセット、シフト、波形の歪み等の影響で検出角度が不連続となって角度飛び(検出角度のジャンプ)が生じることを防止できる。例えば、オフセット電圧等の影響で第1、第2信号の位相差や振幅がずれている場合に第1、第2信号のいずれか一方に基づいて検出角度が算出されると、検出角度の誤差が大きくなる角度範囲が発生し、この角度範囲と、誤差が無いあるいは誤差が小さい角度範囲との間で検出角度が不連続となる。そこで、第1、第2信号の両方を第3角度範囲において重み付けして誤差を抑制することにより、不連続で段差状の特性が誤差の無い線形特性に近づくように補正できる。すなわち、オフセット電圧等に起因する角度飛びを解決しつつ、角検出精度を向上させることができる。
【0021】
本発明の角度検出装置においては、制御部は、センサ信号が示す電圧の大小に基づいてセンサ信号の信号変化率の大小を判断することが好ましい。
例えば、センサ信号の電圧が基準値以上の場合に信号変化率が小さい(または大きい)、あるいはセンサ信号の電圧が基準値以下の場合に変化量が小さい(または大きい)と判断することができる。
【0022】
本発明によれば、信号変化率を算出することなく、センサ信号が示す電圧に基づいて直ちに信号選択を行うことができる。これにより、制御部の処理を簡略化できる。また、角度検出周期を短縮できるので、本発明の角度検出装置を備えた操舵装置の操作応答性を向上させることができる。
なお、センサ信号が電流値を示す場合には、その電流の大小に基づいてセンサ信号の信号変化率の大小を判断することが好ましい。
【0023】
本発明の角度検出装置においては、センサ信号の信号値と角度との対応関係を示す角度変換情報を記憶する記憶部を備え、制御部は、選択されたセンサ信号の信号値に対応する角度を角度変換情報から取得することが好ましい。
【0024】
本発明によれば、角度変換情報を用いることにより、センサ信号の信号値(例えば、電圧)の角度への変換を、角度検出する都度行うことを不要にできるので、処理の簡略化および操舵応答性の向上を図ることができる。
【0025】
以上説明した角度検出装置は、種々の車両の操舵装置に適用できる。この操舵装置は、作業車両に適用されることが好ましい。このような操舵装置、作業車両によれば、前述の角度検出装置の発明と同様の作用および効果を享受できる。
【0026】
本発明の角度検出方法は、互いに位相差を有し一方が選択されて角度検出に用いられる2つのセンサ信号である第1信号および第2信号の一方の信号変化率が他方の信号変化率よりも小さくなる場合に、選択される信号を一方から他方へと切り替える信号選択ステップを有することを特徴とする。
【0027】
本発明の第2の角度検出方法は、互いに位相差を有し少なくとも一方が選択されて角度検出に用いられる2つのセンサ信号である第1信号および第2信号の一方の信号変化率が基準値よりも小さくかつ他方の信号変化率が基準値よりも大きい場合に、他方を選択することを特徴とする。
【0028】
本発明の第3の角度検出方法は、互いに位相差を有する2つのセンサ信号である第1信号および第2信号の少なくとも一方を選択して角度検出に用いる角度検出方法であって、この方法により前回求められた検出角度が第1角度範囲である場合に、第1信号を選択し、他の角度範囲である場合に第2信号を選択する信号選択ステップを有することを特徴とする。
【0029】
これらの発明によっても、前述した角度検出装置の発明と同様に、第1、第2信号のうち信号変化率が相対的に大きい方が選択され、高い分解能を維持しながら角度を検出できるので、角検出精度を向上させることができる。
【発明の効果】
【0030】
本発明によれば、第1、第2信号を選択的に用いることで、分解能が低い変曲点近傍領域の信号値に基づいて角度が検出されることが回避されるので、常に高い分解能を維持できる。これにより、角検出精度を向上できるとともに、操舵操作性を向上させることができる。
【図面の簡単な説明】
【0031】
【図1】第1実施形態に係る作業車両の一例としてのフォークリフトを示す外観側面図である。
【図2】第1実施形態に係る操舵装置が行う制御を説明するための図である。
【図3】第1実施形態に係る制御装置の内部構成を示すブロック図である。
【図4】前記制御装置が有する記憶部に格納された角度変換テーブルを示す図である。
【図5】前記制御装置が有する検出角度算出部によって処理されるsin信号およびcos信号を示す図である。
【図6】前記検出角度算出部によって行われる角度検出方法の処理を示すフローチャートである。
【図7】第2実施形態における角度検出について説明するため、オフセットした信号を示す図である。
【図8】図7とは異なる態様のオフセットが生じた信号を示す図である。
【図9】オフセットが生じた場合の検出誤差を示す図である。
【図10】第2実施形態に係る検出角度算出部によって処理されるsin信号およびcos信号を示す図である。
【図11】検出角度におけるsin信号成分とcos信号成分との配分割合を示す図である。
【図12】前記検出角度算出部によって行われる角度検出方法の処理を示すフローチャートである。
【図13】本発明の変形例における角度検出を説明するための図である。
【発明を実施するための形態】
【0032】
以下、添付図面に示す実施の形態に基づいてこの発明を詳細に説明する。
【0033】
〔第1実施形態〕
図1〜図6を参照して本発明の第1実施形態について説明する。
図1は、本実施の形態に係るリーチ型のフォークリフト1の外観側面図である。フォークリフト1は、倉庫内や工場内などでの荷物の運搬に用いられる作業車両であり、車体前部には、車体11から前方に向かって延出された上で路面12と平行に配置された左右一対のストラドルアーム13と、昇降動作するフォーク14を支持しながらストラドルアーム13に沿って進退動作するマスト15とが配備されている。また、この車体前部、つまり、各ストラドルアーム13の先端部には左右一対の前輪17が配設されていると共に、車体後部には左右一対の駆動輪18及び従動輪19が配設されており、駆動輪18は走行駆動用の他に操舵用としても機能する。
なお、フォークリフト1は本発明の作業車両の例示に過ぎず、その他の物流車両、農業車両、産業車両などにも本発明を適用できる。
【0034】
フォークリフト1は、電動パワーステアリング(EPS)と呼ばれる操舵装置20を備えている。操舵装置20は、水平方向に回動可能なハンドル21と、ハンドル21の回動軸に設けられてハンドルの角度(ハンドル角)を検出するハンドル角センサ22と、駆動輪18を方向転換させるEPSモータ23と、EPSモータ23に設けられて駆動輪18のタイヤ向きを示す角度(タイヤ切れ角あるいは操舵角)を検出するタイヤ角センサ24と、CPUなどを含む制御装置30(図3)とを備えている。EPSモータ23は、後輪タイヤをタイヤ角方向に回動させる。ここで、本発明の角度検出装置は、ハンドル角センサ22、タイヤ角センサ24、および制御装置30を含んで構成されている。
【0035】
ハンドル角センサ22およびタイヤ角センサ24は、コイルを含んで構成される回転角センサであり、ハンドル角センサ22およびタイヤ角センサ24のそれぞれから、二相のセンサ信号、すなわちsin信号およびcos信号が制御装置30に向けて出力される。これらの信号は、ハンドル21のハンドル角および駆動輪18のタイヤ角に対応する電圧値として出力される。
【0036】
図2は、操舵装置20が行う制御を説明するための図である。ハンドル角センサ22およびタイヤ角センサ24により、ハンドル角およびタイヤ角がそれぞれ検出されると、検出されたハンドル角に対応するタイヤ角指令値と、検出されたタイヤ角との差分に基づいて、EPSモータ速度指令値が演算される。さらに、EPSモータ速度指令値と、EPSモータの速度検出値との差分に基づいて、トルク指令が演算される。このトルク指令をEPSモータ23に入力することで、EPSモータ23が制御される。これらの一連の処理により、操舵装置20全体の制御が行われている。
【0037】
図3は、制御装置30の内部構成を示すブロック図である。制御装置30は、ハンドル角センサ22から信号を受け取るハンドル角取得部31と、タイヤ角センサ24から信号を受け取るタイヤ角取得部32と、ハンドル角取得部31およびタイヤ角取得部32がそれぞれ取得した信号を処理する制御部としての検出角度算出部33と、記憶部34とを有している。
なお、本実施形態では、ハンドル角とタイヤ角とのそれぞれの処理に共通の検出角度算出部33が用いられるが、ハンドル角に係る検出角度算出部とタイヤ角に係る検出角度算出部とが別々に設けられていてもよい。
【0038】
図4は、記憶部34に格納された角度変換情報の一例としての角度変換テーブル35を示す。角度変換テーブル35は、ハンドル角センサ22およびタイヤ角センサ24のそれぞれの事前試験結果に基づいて作成されたものであり、各センサに対応する入力信号を角度に変換するために用いられる。角度変換テーブル35には、ハンドル角センサ22およびタイヤ角センサ24のそれぞれを動作させて、取得部31あるいは取得部32を介して制御装置30に入力された入力信号の信号電圧と角度(ハンドル角およびタイヤ角)との関係がプロットされている。
【0039】
本実施形態の角度変換テーブル35は、ハンドル角センサ22とタイヤ角センサ24とに共通であるが、ハンドル角センサ22用の角度変換テーブルと、タイヤ角センサ24用の角度変換テーブルとがそれぞれ設けられていてもよい。
【0040】
図5は、ハンドル角取得部31およびタイヤ角取得部32が取得した信号に対する検出角度算出部33の処理について説明するための図である。ハンドル角取得部31およびタイヤ角取得部32のそれぞれから、第1信号としてのsin信号および第2信号としてのcos信号が検出角度算出部33に送られる。図5に、sin信号を太線で示し、cos信号を細線で示した。ハンドル角取得部31が取得したsin信号およびcos信号はそれぞれ、ハンドル21の角度に対応する値を示し、タイヤ角取得部32が取得したsin信号およびcos信号はそれぞれ、駆動輪18の切れ角に対応する値を示す。ハンドル21を操作して操舵方向を次第に変化させると、図5のsin信号およびcos信号の波形が得られる。すなわち、操舵方向が直進の場合に(操舵角0°)、図5に示した中心角度180°を示すsin、cos信号がハンドル角センサ22およびタイヤ角センサ24から出力される。この直進の状態からハンドル21を一方の側に全部回すと、360°を示すsin、cos信号が出力され、ハンドル21を他方の側に全部回すと、0°を示すsin、cos信号が出力される。
【0041】
sin信号とcos信号とは、同様の振幅および周期を有し、相対的に90°の位相差を有する。図5の縦軸は信号電圧を示す。本実施形態のsinおよびcos信号のピーク値−ピーク値は0.5Vから4.5Vまでである。この信号電圧はあくまで、sin、cos信号の電圧の一例である。なお、sin、cos信号の位相差が90°から少しずれていたり、周期が少し違っていてもよい。sin,cos信号の振幅は違っていてもよい。
【0042】
sin信号およびcos信号にはそれぞれ、温度変化による抵抗値の変化や、取得部31,32による電圧変換などによる影響により、例えばsin(θ+α)、cos(θ+β)のように位相差が加わる場合があるため、sin信号およびcos信号の位相の遅れ進みの関係が図5に示したものとは逆になる場合がある。その場合の処理は、以降の説明において、sinとcosとを読み替えることで説明できる。
【0043】
検出角度算出部33は、sin信号およびcos信号を用いて、A/D変換(analog to digital conversion)のためのサンプリングを実施する。ここで、例えばsin信号カーブを所定のサンプリング周期(例えば10ms)で複数点読み取ってディジタル信号を生成した場合には、sin信号の変曲点近傍で分解能の低さから検出精度が悪化するおそれがあるため、sin信号の変曲点近傍では、sin信号と同じく角度を示すもう一つの信号であるcos信号を角度検出に用いる。これにより、常に高い分解能を維持しながら角度を検出できる。すなわち、信号変化率(信号量を角度で微分したときの勾配であり、本実施形態では電圧勾配)に応じて、sin信号およびcos信号の一方が選択されて角度検出に用いられる。
【0044】
第1、第2信号が角度検出に用いられるとは、その信号の値が検出角度(サンプリング点の値)を決定するために読み取られる場合をいう。その信号の値が他の信号の値や基準値との比較に用いられるに過ぎない場合には、その信号が角度検出に用いられるとは言わないものとする。
なお、本実施形態では、信号変化率に応じてsin信号およびcos信号の一方を選択する際に、信号電圧と基準値とを比較している。すなわち、信号電圧と基準値との比較結果に応じて、sin信号およびcos信号の一方が選択される。信号電圧と比較される基準値としては、第1基準値V1と第2基準値V2とが用いられる。これら第1、第2基準値V1,V2は、sin、cos信号の振幅中心に対して対称に決められることが好ましい。本実施形態の第1、第2基準値V1,V2は、振幅中心の2.5Vから等しく離れた3.914V、1.086Vにそれぞれ設定されている。
【0045】
図6は、検出角度算出部33によって行われる角度検出方法の処理を示すフローチャートである。
検出角度算出部33は、信号電圧と基準値との比較結果に応じて場合分けを行い(信号電圧判定ステップS11〜14)、sin信号およびcos信号のいずれを選択するかを決定する(信号選択ステップS21,S22)。
【0046】
例えば、cos信号の電圧Vcosが第1基準値V1(図5)以上である場合(ステップS11でY)、すなわち図5の(i)の角度範囲においては、角度検出に用いる信号としてsin信号が選択される(ステップS21)。そしてsin信号の電圧Vsinで角度変換テーブル35を参照してVsinを角度xに変換し(ステップS31)、その角度xについて「θ´0=x」の演算を行い、計算角度θ´0を得る(ステップS41)。
【0047】
また、sin信号の電圧Vsinが第1基準値V1(図5)を超えている場合(ステップS12でY)、すなわち図5の(ii)の角度範囲においては、cos信号が選択される(ステップS22)。そしてcos信号の電圧Vcosで角度変換テーブル35を参照してVcosを角度xに変換し(ステップS32)、その角度xについて「θ´0=270°−x」の演算を行い、計算角度θ´0を得る(ステップS42)。
【0048】
あるいは、cos信号の電圧Vcosが第2基準値V2(図5)以下である場合(ステップS13でY)、すなわち図5の(iii)の角度範囲においては、sin信号が選択される(ステップS21)。そしてsin信号の電圧Vsinで角度変換テーブル35を参照してVsinを角度xに変換し(ステップS31)、その角度xについて「θ´0=360°−x」の演算を行い、計算角度θ´0を得る(ステップS43)。
【0049】
さらに、sin信号の電圧Vsinが第2基準値V2(図5)未満である場合(ステップS14でY)、すなわち図5の(iv)の角度範囲においては、cos信号が選択される(ステップS22)。そしてcos信号の電圧Vcosで角度変換テーブル35を参照してVcosを角度xに変換し(ステップS32)、その角度xについて「θ´0=270°+x」の演算を行い、計算角度θ´0を得る(ステップS44)。
【0050】
なお、sin、cos信号の位相差や振幅等が図5に示すような関係である場合には、ステップS11〜S14のいずれかでYとなるため、ステップS15は行われない。
【0051】
上記のように第1、第2基準値V1,V2に基づいてsin,cos信号の一方が選択されるため、角度変換テーブル35(図4)を参照するステップS31,S32では第2基準値V2超、および第1基準値V1未満の値のみが参照される。すなわち、第2基準値V2以下、あるいは第1基準値V1以上である電圧分解能が低い領域の値は参照されない。
以上の処理においては、sin信号およびcos信号が共通の角度変換テーブル35によって角度に変換されるため、(i)〜(iv)の角度範囲によって異なるsin、cos各信号の増減に応じた演算が行われる。
【0052】
検出角度算出部33は、上記の計算角度θ´0を0°〜360°の範囲に収め(ステップS5)、検出角度θ0として出力する(ステップS6)。このステップS6では、例えば計算角度θ´0が405°の場合には、「45°」の検出角度θ0が出力される。すなわち、角度変換テーブル35から得られた角度xは所定の演算後、0°〜360°の範囲にマッピングされて出力される。
以上のように、検出角度算出部33がsin信号またはcos信号を読み取り、読み取った値を角度に変換し、その角度をsin信号/cos信号の別、および各信号の増減に応じて演算することにより、検出角度θ0が算出される。
【0053】
本実施形態における第1基準値V1(3.914V)は、図5におけるcos信号の位相角45°および135°のそれぞれに対応する信号電圧である。cos信号に90°遅れるsin信号について見れば、第1基準値V1は、cos信号の位相角135°および225°のそれぞれに対応する信号電圧である。また、本実施形態における第2基準値V2(1.086V)は、図5におけるcos信号の位相225°および315°のそれぞれに対応する信号電圧であり、sin信号について見れば、第2基準値V2はcos信号の位相315°および45°のそれぞれに対応する信号電圧である。
【0054】
このように決められた第1、第2基準値V1,V2に基づいて、検出角度算出部33は、角度90°毎に区切られた(i)〜(iv)の4つの角度範囲(図5)を設定している。これらの(i)〜(iv)の角度範囲は、sin信号が選択される第1角度範囲d1と、cos信号が選択される第2角度範囲d2との2種類に二分される。
ここで、図5の角度45°、135°、225°、315°のそれぞれの角度において、sin信号の電圧勾配とcos信号の電圧勾配との大小関係が逆転する。つまり、sin信号の電圧を角度で微分した電圧変化率をΔVsin、cos信号の電圧を角度で微分した電圧変化率をΔVcosとすると、(i)の角度範囲ではΔVsin>ΔVcosであるが、(ii)の角度範囲ではΔVcos>ΔVsinとなり、以下同様に、(iii)、(iv)の各角度範囲においてもΔVsinとΔVcosとの大小関係が切り替わる。
【0055】
検出角度算出部33は、(i)〜(iv)の各角度範囲において、角度検出に用いるものとして選択するsin信号およびcos信号を順次切り替えている。すなわち、第1角度範囲d1と第2角度範囲d2とが位相角90°毎に交互に配置されている。sin、cos信号の切り替えは、図5に実線で示した部分を辿るように行われる。
例えば、(i)の角度範囲ではsin信号が選択されるが(第1角度範囲)、(ii)の角度範囲では、図6のステップS12における信号電圧と第1基準値V1との比較により、sin信号に代えてcos信号が選択される(第2角度範囲)。上記のように、第1基準値V1はsin信号およびcos信号のそれぞれの電圧変化率ΔVsin,ΔVcosの大小が切り替わる角度を規定しており、(i)の角度範囲ではΔVsin>ΔVcosであったものが、sin信号とcos信号との交点を超えるとΔVsin<ΔVcosとなるので、ピーク電圧に近づき分解能が低くなったsin信号に代えて、電圧勾配が急峻であり分解能が相対的に高いcos信号が選択される。
以下同様に、(iii)、(iv)のそれぞれの角度範囲において、sin信号およびcos信号が切り替えられる。これにより、sin、cos信号それぞれの図5に破線で示した領域の信号値が角度検出には用いられないので、高い分解能を維持しながら角度を検出できる。
【0056】
なお、sin、cos信号の切り替えに用いられる指標は、上記のように信号電圧と比較される第1、第2基準値V1,V2に限らない。第1、第2基準値V1,V2は信号変化率を知るために使用可能な一つの物理量に過ぎない。すなわち、信号変化率が基準値よりも小さいか否かは、信号電圧と第1、第2基準値との比較によって決められていてもよいが、その他、sin、cos各信号の電圧勾配、電流勾配、および前回の検出角度などに基づいて決められていてもよい。
【0057】
図5および図6を参照して説明した以上のような処理を経て、ハンドル角センサ22およびタイヤ角センサ24のそれぞれのセンサ信号(sin信号およびcos信号)がA/D変換された検出角度θ0が得られる。この検出角度θ0は、操舵装置20が行う制御(図2)におけるハンドル角検出値およびタイヤ角検出値として扱われる。上述のように、sin信号およびcos信号が角度検出に選択的に用いられてハンドル角およびタイヤ角の検出精度が向上するので、ハンドル角検出値とタイヤ角検出値とのずれが生じにくくなる。すなわち、フォークリフト1の操作性を向上させることができる。
【0058】
〔第2実施形態〕
次に、図7〜図10を参照して本発明の第2実施形態について説明する。
上述したsin信号およびcos信号には、温度変化や電圧変動などによって電圧オフセット、位相シフト、波形の歪み等が生じる可能性がある。
図7は、cos信号にオフセット電圧が生じている例を示す。図7において実線で示したcos信号は、図7に二点鎖線で示したcos信号(図5のcos信号と同様)に−0.1Vのオフセット電圧が加わったものである。このようなオフセットや、位相シフト、波形の歪み等がsin、cos信号の少なくとも一方に生じると、sin信号とcos信号との位相差や振幅の関係が図5に示した理想的な関係とは異なるものとなり、第1実施形態のようにsin、cos信号の一方を選択して角度検出に用いたのでは検出角度に誤差が生じてしまう。
【0059】
図7のように、−0.1Vのオフセット電圧がcos信号に加わった場合に第1実施形態の方法で検出角度を計算した際の誤差について説明する。このような誤差は、例えば、角度45°に相当する第1基準値V1(図5)の前後で生じる。これについて、40°〜49.2°の範囲で見ていく。
【0060】
40°では、sin信号の電圧Vsinが第2基準値V2(1.086V)より小さいため(図6のステップS14でY)、cos信号の電圧Vcosで角度変換テーブル35を参照して取得した角度xについて演算が行われる。オフセットを含むVcosが3.686Vなので角度xは126.4°であり、演算の結果、検出角度θ0が36.4°となる。すなわち、Vcosが−0.1V小さいため、真の角度40°に対して検出角度θ0が3.6°小さく計算される。
【0061】
次に、44.9°においても、sin信号の電圧Vsinが第2基準値V2より小さいので(図6のステップS14でY)、Vcosで角度変換テーブル35を参照して取得した角度xについて演算が行われる。オフセットのためVcosは3.812Vなので角度xは131.0°であり、検出角度θ0は41°となる。すなわち、真の角度44.9°に対して検出角度θ0が3.9°小さく計算される。
【0062】
45°のとき、オフセットがなければVsin=1.086V、Vcos=3.914Vであるが、−0.1Vのオフセット電圧によりVcosは3.814Vなので、ステップS11〜S14のいずれにも該当しない。このとき、ステップS15の処理により、前回の検出角度と同じ値が検出角度θ0として出力される。そして、−0.1Vのオフセット電圧を含むVcosが3.914Vとなる角度49.2°までの間、検出角度θ0が変化しないことになる。
【0063】
49.2°になると、Vsinが1.193V、Vcosが3.914Vとなるので、ステップS11でYとなり、選択される信号がcos信号からsin信号に切り替えられる。そして、sin信号で角度変換テーブル35を参照して取得した角度xについて演算する。この場合には、オフセットしていないsin信号により、真値49.2°と同じ正しい検出角度θ0が得られる。
【0064】
ここで、40°から45°未満の角度範囲においては、40°から45°に向かってcos信号の電圧勾配が小さくなる分、真値に対する検出角度の誤差が拡大する。また、45°以上49.2°未満の角度範囲においては、一定の検出角度θ0が出力される。そして、49.2°になった際に誤差がない検出角度θ0が出力される。すなわち、誤差がある角度範囲と誤差が無い角度範囲とが切り替わる際に検出角度θ0が不連続となる。すなわち、検出角度のジャンプ(角度飛び)が発生してしまう。
【0065】
上記では第1実施形態のように第1、第2基準値V1,V2によりsin、cos信号を切り替える場合の誤差発生について説明したが、検出角度θ0を記憶部34に保存し、この保存された前回の検出角度y0に基づいてsin,cos信号が選択される構成とした場合にも、検出角度の誤差が生じる。
図8は、図7とは異なる態様のオフセットがcos信号に加わった例を示す。センサに用いられた抵抗の値の温度変化による変化や、取得部31,32による分圧、昇圧などの処理により、オフセットの態様は図7、図8のように異なる場合がある。つまりオフセット電圧は一定ではない。図8に実線で示したcos信号に生じているオフセット電圧は、変曲点近傍に向かって大きくなる。
【0066】
図9は、図8のようにオフセットが存在する場合に角度45°近傍で生じる誤差の一例を示す。図9の横軸は、検出されるべき角度の真値であり、縦軸は、検出角度算出部33が算出する検出角度である。図9の二点鎖線は、オフセットがなくsin、cos信号が理想関係にある状態を示し、この状態の場合には真値に対する検出角度の誤差がないが、図8の信号のようにオフセットがある場合には、図9の一点鎖線に示すように真値に対して誤差が生じる。
【0067】
この誤差について、前回の検出角度y0に基づいて信号が選択される場合を想定してより具体的に考えてみる。オフセットがない場合のsin、cos信号の電圧勾配に基づいて、前回の検出角度y0が図8の0°〜45°の範囲ではcos信号が選択されるように決められている。また、前回の検出角度y0が45°となる前後でcos信号からsin信号に選択信号が切り替えられる。この場合において0°〜45°の範囲でcos信号が選択されるとき、図8のcos信号のオフセット特性より、0°から90°に向かって、オフセットが無い場合のcos信号に対する実際のcos信号の電圧差が拡大するので、図9に示すように、真値に対する検出角度の誤差が拡大していく。そして、前回の検出角度が45°となりsin信号に切り替わった際に、オフセットなしのsin信号に基づいて正しい検出角度が出力される。このとき、検出角度が不連続となるので、図7を参照して説明した場合とほぼ同様に検出角度がジャンプする。
【0068】
以上のように検出角度がジャンプする問題を解決するために、本実施形態は、図9に太い実線で示したように、真値に対する検出角度の誤差を抑制する構成を採用している。すなわち、図9に一点鎖線で示したような誤差が大きく不連続な出力を、図9に二点鎖線で示した誤差のない状態に近づけるように補正する。
【0069】
誤差抑制のため、本実施形態では図10に示すように、sin信号が選択される第1角度範囲d1と、cos信号が選択される第2角度範囲d2との間にsin、cos信号の両方が選択されて角度検出に用いられる第3角度範囲d3が設けられている。前回の検出角度y0が、第1角度範囲d1である場合にsin信号が選択され、第2角度範囲d2である場合にcos信号が選択され、第3角度範囲d3である場合にsin、cos信号の両方が選択され、これらの電圧がそれぞれ変換された角度が重み付けされて角度検出に用いられる。
【0070】
図11は、sin、cos信号の両方を角度検出に使用する上での配分割合を示す。sin、cos信号は、第3角度範囲d3内で比例配分される。
【0071】
以下、本実施形態における角度検出方法について説明する。
本実施形態では、検出角度の初期値を決めるにあたり、図6に示した第1実施形態のフローを用いる。図6のフローに基づいて検出角度θ0を決定し、この検出角度θ0を検出角度の初期値として出力する。この初期値は記憶部34に保存され、次回検出の際に読み込まれる。
2回目の検出以降は、図12に示す角度検出方法を用いる。
【0072】
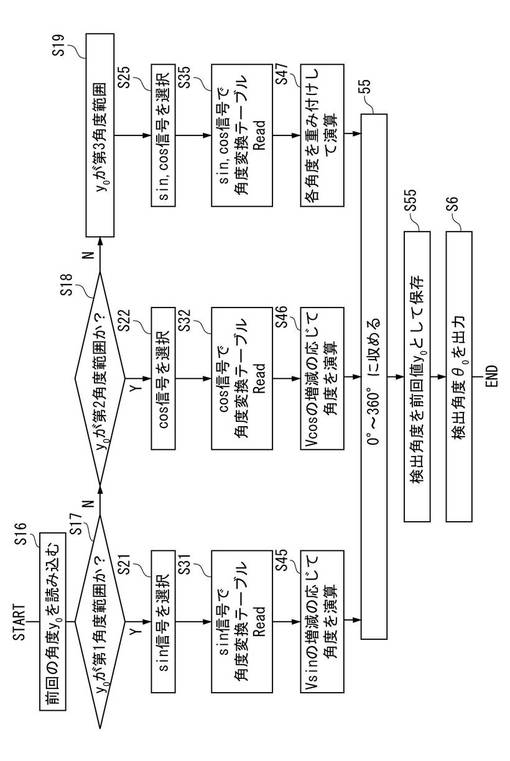
図12は、本実施形態に係る角度検出方法の処理を示すフローチャートである。
本実施形態では、記憶部34から前回の検出角度y0を読み込み(ステップS16)、この検出角度y0に基づいて場合分けを行う。
【0073】
図10で60°≦y0<120°または240°≦y0<300°の場合には、前回の検出角度y0が第1角度範囲に該当するので(ステップS17でY)、sin信号を選択する(ステップS21)。そして、sin信号の電圧Vsinで角度変換テーブル35を参照して角度xを取得し(ステップS31)、Vsinの増減に応じて演算を行う(ステップS45)。このときの演算としては、60°≦y0<120°の場合には、θ´0=xを行い、240°≦y0<300°の場合には、θ´0=360°−xを行う。
【0074】
また、0°≦y0<30°または330°≦y0<360°、あるいは150°≦y0<210°の場合には、前回の検出角度y0が第2角度範囲に該当するので(ステップS18でY)、cos信号を選択する(ステップS22)。そして、cos信号の電圧Vcosで角度変換テーブル35を参照して角度xを取得し(ステップS32)、Vcosの増減に応じて演算を行う(ステップS46)。このときの演算としては、0°≦y0<30°または330°≦y0<360°の場合には、θ´0=270°+xを行い、150°≦y0<210°の場合には、θ´0=270−xを行う。
【0075】
さらに、30°≦y0<60°、120°≦y0<150°、210°≦y0<240°、300°≦y0<330°の場合には、前回の検出角度y0が第3角度範囲に該当するので(ステップS19)、sin、cos信号の両方を選択する(ステップS25)。そして、角度変換テーブル35をsin信号の電圧Vsinおよびcos信号の電圧Vcosでそれぞれ読んで角度xsinおよび角度xcosを取得する(ステップS35)。これらの角度xsinおよび角度xcosに対して次の演算を行う。
【0076】
30°≦y0<60°のとき、次式(1)の演算を行う。
【数1】
【0077】
上記の式(1)のように、sin、cos信号の値がそれぞれ変換された角度xsinおよび角度xcosが検出角度y0に応じて第3角度範囲d3(30°≦y0<60°である角度差30°の角度範囲)内で比例配分される。
ここで、図10を参照し、オフセットがない状態(二点鎖線のcos信号)とsin信号とを比較すると、30°≦y0<60°の中心値45°において、sin、cos両信号の電圧勾配の大小関係が逆転する。このような逆転点を含む角度範囲30°≦y0<60°において上記式(1)のような比例配分をすることにより、45°よりも小さい角度では電圧勾配が大きいcos信号の配分を大きく、逆に45°よりも大きい角度ではsin信号の配分を大きくして重み付けされることになる。このようにすることで、オフセット等が生じていても各信号の電圧勾配を反映した検出角度が得られるので、検出角度を連続的にできる。すなわち、検出角度がジャンプしない。以下に示す式(2)〜(4)についても同様である。
【0078】
120°≦y0<150°のとき、次式(2)の演算を行う。
【数2】
【0079】
210°≦y0<240°のとき、次式(3)の演算を行う。
【数3】
【0080】
300°≦y0<330°のとき、次式(4)の演算を行う。
【数4】
【0081】
以上のようにして計算角度θ´0を求めたら、この計算角度θ´0を0°〜360°の範囲に収め、検出角度θ0を得る(ステップS5)。さらに、この検出角度θ0を記憶部34に保存し(ステップS51)、出力する(ステップS6)。
本実施形態によれば、信号のオフセットやシフト等による検出角度の誤差を抑制できるので、オフセットやシフト等の原因となる温度変化や電圧変動に関する信頼性を向上させることができる。
【0082】
〔本発明の変形例〕
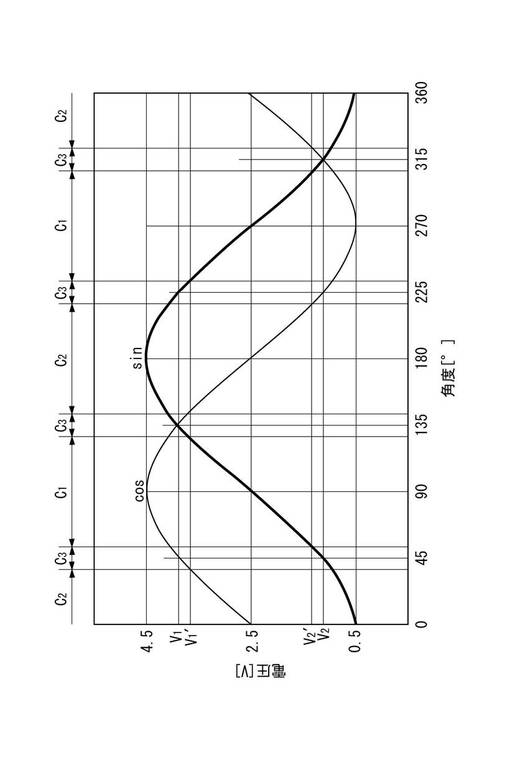
図13は、本発明の変形例における角度検出を説明するための図である。図13の例では、第1基準値V1よりも小さい第1基準値V1´、および第2基準値V2よりも大きい第2基準値V2´に基づいてsin、cos信号の選択を行っている。これらの第1、第2基準値V1´,V2´は、sin、cos信号の電圧勾配が逆転する角度(45°など)から外れた角度に対応しているが、これは意図的に決められているとは限らず、sin、cos信号のオフセットや位相シフト、波形の歪み等によってこのように電圧基準値がsin、cos信号の勾配逆転角度からずれる可能性がある。このように信号電圧の勾配が逆転する角度から電圧基準値がずれている場合には、次に示す方法で角度検出を行うことが好ましい。
【0083】
sin信号の電圧をVsin、cos信号の電圧をVcosとすると、V2´<Vsin<V1´であって、Vcos≧V1´でかつVcos≦V2´である場合(第1の場合)には、sin信号が選択される。図13の例では第1区間c1においてsin信号が選択される。
また、V2´<Vcos<V1´であって、Vsin≧V1´でかつVsin≦V2´である場合(第2の場合)には、cos信号が選択される。図13の例では第2区間c2においてcos信号が選択される。
【0084】
また、上記の第1の場合にも第2の場合にも該当しない第3の場合には、sin、cos信号の両方が選択される。図13の例では第3区間c3においてsin、cos信号の両方が選択される。第3の場合には、VsinおよびVcosのいずれもV2からV1までの範囲内である場合と、VsinおよびVcosのいずれもV2以下あるいはV1以上である場合とがある。これらの場合には、sin信号の電圧とcos信号の電圧との平均値によって角度変換テーブル35を読み、角度xを取得する。
【0085】
以上において、V2´<Vsin<V1´であることは、sin信号の信号変化率(電圧変化率)が電圧変化率を規定する変化率の基準値よりも小さいことに該当し、V2´<Vcos<V1´であることはcos信号の信号変化率が変化率の基準値よりも小さいことに該当する。また、Vsin≧V1´でかつVsin≦V2´であることはsin信号の信号変化率が変化率の基準値以上であることに該当し、Vcos>V1´でかつVcos<V2´であることはcos信号の信号変化率が変化率の基準値よりも大きいことに該当する。
したがって、V2´<Vsin<V1´であってVcos>V1´でかつVcos<V2´である場合(第1の場合)と、V2´<Vcos<V1´であって、Vsin>V1´でかつVsin<V2´である場合(第2の場合)とのいずれも、第1信号(sin信号)および第2信号(cos信号)の一方の信号変化率が基準値よりも小さくかつ他方の信号変化率が基準値よりも大きい場合に該当する。この場合には、信号変化率が相対的に大きい他方の信号が選択される。
【0086】
上述のように第1、第2基準値V1´、V2´がsin、cos信号の勾配の大小が逆転する角度(45°等)に対応する値から外れているため、第1、第2基準値V1,V2を基準値とする図5の場合とは異なり、sin、cos信号の信号変化率のいずれも基準値より小さいか、あるいは第1、第2信号の変化量のいずれも基準値よりも大きい場合がある。この場合が上記の第3の場合に該当する。
この第3の場合に、上述のようにsin、cos信号の電圧の平均値に基づいて角度を検出することにより、オフセット電圧等の影響でsin、cos信号の位相差や振幅がずれている場合に生じる検出角度の誤差を小さくできる。
【0087】
本発明の主旨を逸脱しない限り、上記実施の形態で挙げた構成を取捨選択したり、他の構成に適宜変更することが可能である。
【符号の説明】
【0088】
1 フォークリフト(作業車両)
11 車体
12 路面
13 ストラドルアーム
14 フォーク
15 マスト
17 前輪
18 駆動輪
19 従動輪
20 操舵装置
21 ハンドル
22 ハンドル角センサ(角度センサ)
23 EPSモータ
24 タイヤ角センサ(角度センサ)
30 制御装置
31 ハンドル角取得部
32 タイヤ角取得部
33 検出角度算出部(制御部)
34 記憶部
35 角度変換テーブル(角度変換情報)
d1 第1角度範囲
d2 第2角度範囲
d3 第3角度範囲
S21,S22 信号選択ステップ
V1 第1基準値
V2 第2基準値
Vcos cos信号の電圧
Vsin sin信号の電圧
y0 前回の検出角度
θ0 検出角度
【特許請求の範囲】
【請求項1】
互いに位相差を有する2つのセンサ信号である第1信号および第2信号を出力する角度センサと、
前記第1信号および前記第2信号の信号変化率に基づいて、前記第1信号および前記第2信号の一方を選択して角度検出に用いる制御部と、を備え、
前記制御部は、前記第1信号および前記第2信号の一方の信号変化率が他方の信号変化率よりも小さくなる場合に、選択される信号を前記一方から前記他方へと切り替えることを特徴とする角度検出装置。
【請求項2】
互いに位相差を有する2つのセンサ信号である第1信号および第2信号を出力する角度センサと、
前記第1信号および前記第2信号の信号変化率に基づいて、前記第1信号および前記第2信号の少なくとも一方を選択して角度検出に用いる制御部と、を備え、
前記制御部は、前記第1信号および前記第2信号の一方の信号変化率が基準値よりも小さくかつ他方の信号変化率が前記基準値よりも大きい場合に前記他方を選択することを特徴とする角度検出装置。
【請求項3】
互いに位相差を有する2つのセンサ信号である第1信号および第2信号を出力する角度センサと、
前記第1信号および前記第2信号の少なくとも一方を選択して角度検出に用いる制御部と、を備え、
前記制御部は、前記制御部により前回求められた検出角度が第1角度範囲である場合に前記第1信号を選択し、前記検出角度が前記第1角度範囲とは異なる第2角度範囲である場合に前記第2信号を選択することを特徴とする角度検出装置。
【請求項4】
前記検出角度が前記第1信号および前記第2角度範囲のいずれでもない第3角度範囲である場合に、前記制御部は、前記第1信号および前記第2信号の両方を選択し、これらの信号の値がそれぞれ変換された角度を前記検出角度に応じて前記第3角度範囲内で重み付けして用いる、請求項3に記載の角度検出装置。
【請求項5】
前記制御部は、前記センサ信号が示す電圧の大小に基づいて前記センサ信号の信号変化率の大小を判断することを特徴とする、請求項1から4のいずれか1項に記載の角度検出装置。
【請求項6】
前記センサ信号の信号値と角度との対応関係を示す角度変換情報を記憶する記憶部を備え、
前記制御部は、選択された前記センサ信号の信号値に対応する角度を前記角度変換情報から取得する、請求項1から5のいずれか1項に記載の角度検出装置。
【請求項7】
請求項1から6のいずれか1項に記載の角度検出装置を備えることを特徴とする操舵装置。
【請求項8】
請求項7に記載の操舵装置を備えることを特徴とする作業車両。
【請求項9】
互いに位相差を有し一方が選択されて角度検出に用いられる2つのセンサ信号である第1信号および第2信号の一方の信号変化率が他方の信号変化率よりも小さくなる場合に、選択される信号を前記一方から前記他方へと切り替える信号選択ステップを有することを特徴とする角度検出方法。
【請求項10】
互いに位相差を有し少なくとも一方が選択されて角度検出に用いられる2つのセンサ信号である第1信号および第2信号の一方の信号変化率が基準値よりも小さくかつ他方の信号変化率が前記基準値よりも大きい場合に、前記他方を選択することを特徴とする角度検出方法。
【請求項11】
互いに位相差を有する2つのセンサ信号である第1信号および第2信号の少なくとも一方を選択して角度検出に用いる角度検出方法であって、
前記角度検出方法により前回求められた検出角度が第1角度範囲である場合に前記第1信号を選択し、前記検出角度が前記第1角度範囲とは異なる第2角度範囲である場合に前記第2信号を選択する信号選択ステップを有することを特徴とする角度検出方法。
【請求項1】
互いに位相差を有する2つのセンサ信号である第1信号および第2信号を出力する角度センサと、
前記第1信号および前記第2信号の信号変化率に基づいて、前記第1信号および前記第2信号の一方を選択して角度検出に用いる制御部と、を備え、
前記制御部は、前記第1信号および前記第2信号の一方の信号変化率が他方の信号変化率よりも小さくなる場合に、選択される信号を前記一方から前記他方へと切り替えることを特徴とする角度検出装置。
【請求項2】
互いに位相差を有する2つのセンサ信号である第1信号および第2信号を出力する角度センサと、
前記第1信号および前記第2信号の信号変化率に基づいて、前記第1信号および前記第2信号の少なくとも一方を選択して角度検出に用いる制御部と、を備え、
前記制御部は、前記第1信号および前記第2信号の一方の信号変化率が基準値よりも小さくかつ他方の信号変化率が前記基準値よりも大きい場合に前記他方を選択することを特徴とする角度検出装置。
【請求項3】
互いに位相差を有する2つのセンサ信号である第1信号および第2信号を出力する角度センサと、
前記第1信号および前記第2信号の少なくとも一方を選択して角度検出に用いる制御部と、を備え、
前記制御部は、前記制御部により前回求められた検出角度が第1角度範囲である場合に前記第1信号を選択し、前記検出角度が前記第1角度範囲とは異なる第2角度範囲である場合に前記第2信号を選択することを特徴とする角度検出装置。
【請求項4】
前記検出角度が前記第1信号および前記第2角度範囲のいずれでもない第3角度範囲である場合に、前記制御部は、前記第1信号および前記第2信号の両方を選択し、これらの信号の値がそれぞれ変換された角度を前記検出角度に応じて前記第3角度範囲内で重み付けして用いる、請求項3に記載の角度検出装置。
【請求項5】
前記制御部は、前記センサ信号が示す電圧の大小に基づいて前記センサ信号の信号変化率の大小を判断することを特徴とする、請求項1から4のいずれか1項に記載の角度検出装置。
【請求項6】
前記センサ信号の信号値と角度との対応関係を示す角度変換情報を記憶する記憶部を備え、
前記制御部は、選択された前記センサ信号の信号値に対応する角度を前記角度変換情報から取得する、請求項1から5のいずれか1項に記載の角度検出装置。
【請求項7】
請求項1から6のいずれか1項に記載の角度検出装置を備えることを特徴とする操舵装置。
【請求項8】
請求項7に記載の操舵装置を備えることを特徴とする作業車両。
【請求項9】
互いに位相差を有し一方が選択されて角度検出に用いられる2つのセンサ信号である第1信号および第2信号の一方の信号変化率が他方の信号変化率よりも小さくなる場合に、選択される信号を前記一方から前記他方へと切り替える信号選択ステップを有することを特徴とする角度検出方法。
【請求項10】
互いに位相差を有し少なくとも一方が選択されて角度検出に用いられる2つのセンサ信号である第1信号および第2信号の一方の信号変化率が基準値よりも小さくかつ他方の信号変化率が前記基準値よりも大きい場合に、前記他方を選択することを特徴とする角度検出方法。
【請求項11】
互いに位相差を有する2つのセンサ信号である第1信号および第2信号の少なくとも一方を選択して角度検出に用いる角度検出方法であって、
前記角度検出方法により前回求められた検出角度が第1角度範囲である場合に前記第1信号を選択し、前記検出角度が前記第1角度範囲とは異なる第2角度範囲である場合に前記第2信号を選択する信号選択ステップを有することを特徴とする角度検出方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2012−202785(P2012−202785A)
【公開日】平成24年10月22日(2012.10.22)
【国際特許分類】
【出願番号】特願2011−66946(P2011−66946)
【出願日】平成23年3月25日(2011.3.25)
【出願人】(000006208)三菱重工業株式会社 (10,378)
【Fターム(参考)】
【公開日】平成24年10月22日(2012.10.22)
【国際特許分類】
【出願日】平成23年3月25日(2011.3.25)
【出願人】(000006208)三菱重工業株式会社 (10,378)
【Fターム(参考)】
[ Back to top ]