
角度特性測定方法およびレーダ装置
【課題】誤差の少ない角度変換テーブルを作成すること。
【解決手段】レーダ装置10の角度特性測定方法において、レーダ装置10から送信される信号を受信する受信アンテナ200と、受信アンテナ200によって受信した信号をレーダ装置10に向けて送信する送信アンテナ210を配置し、受信アンテナ200をレーダ装置10の正面方向に常に位置させるとともに、送信アンテナ210と正面方向との間の角度θが所定の範囲で変化するように、受信アンテナ200、送信アンテナ210、および、レーダ装置10の相対的な位置関係を調整し、角度θを変化させながらレーダ装置10から信号を送信し、受信アンテナ200で受信されて送信アンテナ210から送信された信号をレーダ装置10で受信して受信信号の変化を測定することで前記角度特性を測定する。
【解決手段】レーダ装置10の角度特性測定方法において、レーダ装置10から送信される信号を受信する受信アンテナ200と、受信アンテナ200によって受信した信号をレーダ装置10に向けて送信する送信アンテナ210を配置し、受信アンテナ200をレーダ装置10の正面方向に常に位置させるとともに、送信アンテナ210と正面方向との間の角度θが所定の範囲で変化するように、受信アンテナ200、送信アンテナ210、および、レーダ装置10の相対的な位置関係を調整し、角度θを変化させながらレーダ装置10から信号を送信し、受信アンテナ200で受信されて送信アンテナ210から送信された信号をレーダ装置10で受信して受信信号の変化を測定することで前記角度特性を測定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、角度特性測定方法およびレーダ装置に関するものである。
【背景技術】
【0002】
特許文献1には、位相モノパルス方式のレーダ装置に関する技術が開示されている。このような位相モノパルス方式のレーダ装置では、送信アンテナから電波を送信し、対象によって反射された電波を複数の受信アンテナによって受信し、これら複数の受信アンテナによって受信された信号の位相差に基づいて対象とレーダ装置との間の角度を検出する。
【0003】
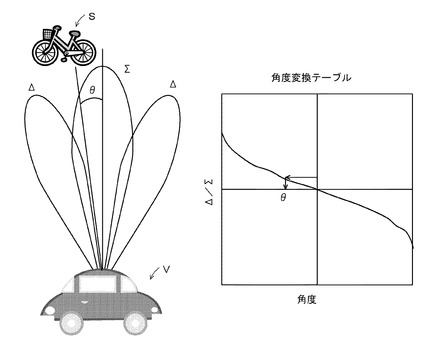
図6は、位相モノパルス方式のレーダ装置の動作原理を示している。位相モノパルス方式のレーダ装置では、レーダ装置が搭載された車両Vから対象Sに対して電波を送信し、その反射波を2つの受信アンテナによって受信し、これらの和信号(Σ)と差信号(Δ)とを求める。そして、和信号と差信号の比(Δ/Σ)を求め、対象とレーダ装置との間の角度と、前述した比(Δ/Σ)との対応関係を示す情報が予め格納されている角度変換テーブルを参照し、対象Sとの角度θを検出する。
【0004】
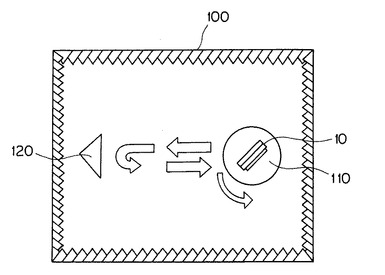
ここで、前述した角度変換テーブルを作成する場合、従来は、図7に示すような方法が採用されていた。すなわち、電波暗室100内に反射物120を配置するとともに、反射物から所定の距離隔てた位置に回転ステージ110を配置する。そして、回転ステージ110上に測定しようとするレーダ装置10を載置し、回転ステージ110を回転させながらレーダ装置10から電波を送信し、反射物120によって反射された電波を受信し、前述した和信号と差信号の比(Δ/Σ)を求める。そして、それぞれの角度において測定された比の値と、角度とを対応付けて格納することにより、角度変換テーブルを得ることができる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2010−223649号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、前述した方法によって角度変換テーブルを作成する場合、図6に示すような受信アンテナの特性に基づく信号の変化を測定する必要があるが、送信アンテナ自体も角度によって指向特性が変化する。このため、特に、反射物120との間の角度が大きい場合(特に、45度以上の場合)には、送信信号の強度が低下するため、受信信号が減少してノイズの影響を受けやすくなることから、測定値が誤差を含んでしまうという問題がある。図8は、図7に示す方法によって得られたディスクリカーブのばらつきを示す図である。この図に示すように、複数回の測定によって生成されたディスクリカーブは、45度以上の角度において、ばらつきが非常に大きくなっている。
【0007】
そこで、本発明は誤差の少ない角度変換テーブルを作成することが可能な角度特性測定方法およびこのような方法で作成された角度変換テーブルを用いたレーダ装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記課題を解決するために、本発明は、レーダ装置の角度特性測定方法において、前記レーダ装置から送信される信号を受信する受信アンテナと、前記受信アンテナによって受信した信号を前記レーダ装置に向けて送信する送信アンテナを配置し、前記受信アンテナを前記レーダ装置の正面方向に常に位置させるとともに、前記送信アンテナと前記正面方向との間の角度θが所定の範囲で変化するように、前記受信アンテナ、前記送信アンテナ、および、前記レーダ装置の相対的な位置関係を調整し、前記角度θを変化させながら前記レーダ装置から信号を送信し、前記受信アンテナで受信されて前記送信アンテナから送信された信号を前記レーダ装置で受信して受信信号の変化を測定することで前記角度特性を測定する、ことを特徴とする。
このような方法によれば、誤差の少ない角度変換テーブルを作成することが可能となる。
【0009】
また、他の発明は、上記発明に加えて、前記送信アンテナの位置を固定し、前記レーダ装置を回転ステージ上に載置して回転させるとともに、前記受信アンテナを前記回転ステージの回転に応じて前記回転ステージの回転軸を中心とする円周上を移動させることにより、前記受信アンテナを前記レーダ装置の正面方向に常に位置させることを特徴とする。
このような方法によれば、受信アンテナ、送信アンテナ、および、レーダ装置の相対的な位置関係を正確に調整することで、角度特性を正確に測定することが可能になる。
【0010】
また、他の発明は、上記発明に加えて、前記レーダ装置および前記受信アンテナの位置を固定し、前記送信アンテナを前記レーダ装置を中心とする円周上を移動させることにより、前記送信アンテナと前記正面方向との間の角度θが所定の範囲で変化するようにすることを特徴とする。
このような方法によれば、受信アンテナ、送信アンテナ、および、レーダ装置の相対的な位置関係を正確に調整することで、角度特性を正確に測定することが可能になる。
【0011】
また、他の発明は、上記発明に加えて、前記受信アンテナによって受信した信号を所定の利得で増幅し、前記送信アンテナに供給することを特徴とする。
このような構成によれば、利得を調整することにより、ノイズの影響を抑えて、さらに正確な角度変換テーブルを生成することができる。
【0012】
また、本発明は、前述した角度特性測定方法によって測定された角度特性に基づいて作成された受信信号と角度の関係を示すテーブルを有するレーダ装置である。
このようなレーダ装置によれば、対象との間の角度を正確に検出することができる。
【発明の効果】
【0013】
本発明によれば、本発明は誤差の少ない角度変換テーブルを作成することが可能な角度特性測定方法およびこのような方法で作成された角度変換テーブルを用いたレーダ装置を提供することが可能となる。
【図面の簡単な説明】
【0014】
【図1】本発明の第1実施形態に係る角度特性測定方法の実現方法を示す図である。
【図2】図1に示すレーダ装置の詳細な構成例を示す図である。
【図3】図1に示す第1実施形態において実行される処理の流れを説明するフローチャートである。
【図4】図1に示す第1実施形態によって測定されたディスクリカーブの標準偏差を示す図である。
【図5】本発明の第2実施形態に係る角度特性測定方法の実現方法を示す図である。
【図6】位相モノパルス方式のレーダ装置の動作原理を説明するための図である。
【図7】従来の角度特性測定方法を説明するための図である。
【図8】従来の角度特性測定方法によって測定されたディスクリカーブの標準偏差を示す図である。
【発明を実施するための形態】
【0015】
次に、本発明の実施形態について説明する。
【0016】
(A)実施形態の第1実施形態の構成の説明
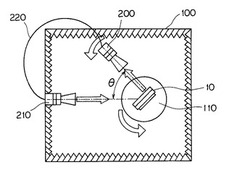
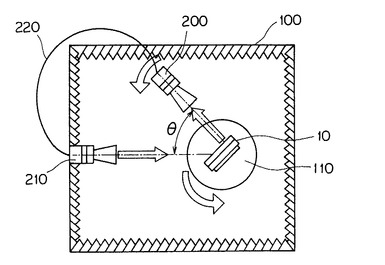
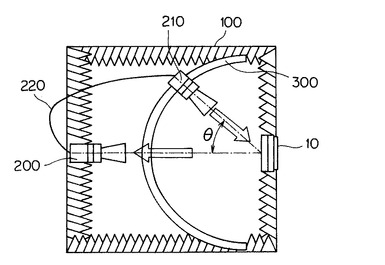
図1は、本発明の第1実施形態の角度特性測定方法を説明するための図である。第1実施形態では、測定装置は、壁面から反射する電波の影響を防ぐために電波暗室100内に配置されている。また、図1に示す例は、回転ステージ110、受信アンテナ200、送信アンテナ210、および、接続ケーブル220を有している。
【0017】
ここで、角度変換テーブルを作成する対象となるレーダ装置10は回転ステージ110の上に載置される。なお、本明細書中において、角度変換テーブルとは、対象とレーダ装置10との間の角度と、和(Σ)信号と差(Δ)信号の比(Δ/Σ)との関係を示す情報を格納したテーブルをいう。なお、角度変換テーブルに格納されている、対象とレーダ装置10との間の角度と、和(Σ)信号と差(Δ)信号の比(Δ/Σ)との関係を示す情報は、ディスクリカーブとも呼ばれる。レーダ装置10は、電波を送信し、対象によって反射された反射波の和信号と差信号の比を求め、この和信号と差信号の比(Δ/Σ)に対応する角度を角度変換テーブルから検索することで、対象とレーダ装置との間の角度を検出することができる。
【0018】
回転ステージ110は、例えば、ステッピングモータによって回転軸が駆動されて任意の角度に回転される。また、回転ステージ110の回転軸にはロータリーエンコーダが取り付けられており、このロータリーエンコーダからの出力がパーソナルコンピュータに供給される。パーソナルコンピュータは、ロータリーエンコーダからの出力を参照して、ステッピングモータを制御することにより、回転ステージ110を所望の角度に回転させる。
【0019】
受信アンテナ200は、例えば、ホーンアンテナによって構成され、レーダ装置10の正面方向にその受信面が常に向くように配置される。なお、レーダ装置10の正面方向とは、レーダ装置10が有する送信アンテナのレンジ方向をいう。例えば、レーダ装置10の送信アンテナがパッチアンテナである場合には、パッチアンテナの法線方向を正面方向(レンジ方向)とすることができる。受信アンテナ200は、回転ステージ110の回転軸を中心とする円の円周上を、回転ステージ110の回転に応じて、そのレンジ方向をレーダ装置10の正面方向を常に向くようにして移動される。具体的な実現方法としては、例えば、回転ステージ110にその径方向に伸びる棒状部材を取り付け、この棒状部材の先端部分に受信アンテナ200をそのレンジ方向をレーダ装置10のレンジ方向に向けて取り付けることにより実現できる。受信アンテナ200は、レーダ装置10から送信された電波を受信して対応する電気信号に変換し、接続ケーブル220を介して送信アンテナ210に供給する。
【0020】
送信アンテナ210は、例えば、ホーンアンテナによって構成され、回転ステージ110の回転角度が0度の場合において、レーダ装置10の正面方向にレンジ方向が向くように配置される。送信アンテナ210は、受信アンテナ200から供給される電気信号に応じた電波をレーダ装置10に向けて送信する。なお、図1に示すように、送信アンテナ210からレーダ装置10を介して受信アンテナ200との間の角度をθとする。
【0021】
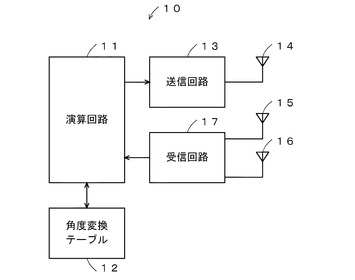
図2は、レーダ装置10の構成例を示す図である。この図に示すように、レーダ装置10は、演算回路11、角度変換テーブル12、送信回路13、送信アンテナ14、受信アンテナ15,16、および、受信回路17を有している。送信回路13は、パルス信号を生成して送信アンテナ14を介して送信する。送信アンテナ14は、送信回路13から供給される電気信号に応じた電波を送出する。受信アンテナ15,16は、それぞれ異なる特性を有するアンテナであり、送信アンテナ14から送信され、対象によって反射された電波を受信して対応する電気信号を出力する。受信回路17は、受信アンテナ15,16から出力される電気信号から和信号としてのΣ信号と、差信号としてのΔ信号を生成し、これらの比の信号Δ/Σを生成して出力する。演算回路11は、受信回路17から出力される比信号Δ/Σを入力し、角度変換テーブル12を参照して対象との角度を演算する。角度変換テーブル12は、比信号Δ/Σと角度θとの関係を示す情報を格納している。なお、本実施形態では、この角度変換テーブル12を作成するための情報を測定する。
【0022】
(B)実施形態の第1実施形態の動作の説明
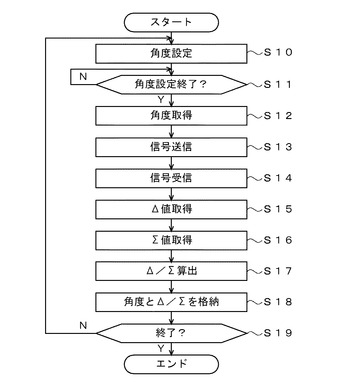
つぎに、第1実施形態の動作について説明する。図3は角度変換テーブル12を生成する際に実行される処理の一例を説明するためのフローチャートである。このフローチャートの処理が開始されると、以下のステップが実行される。
【0023】
ステップS10では、回転ステージ110の角度が設定される。ここで、回転ステージ110の角度の設定方法としては、例えば、回転ステージ110を駆動するステッピングモータをパーソナルコンピュータによって駆動し、回転ステージ110の角度を検出するエンコーダからの出力を参照することで、所望の角度に設定することができる。角度の範囲としては、レーダ装置10が送信アンテナ210に対向したときの角度を0度(図1におけるθ=0)とした場合に、−60度から+60度の範囲とすることができる。もちろん、これ以外の範囲でもよい。なお、ステッピングモータを用いるのではなく、手動で角度を設定するようにしてもよい。
【0024】
ステップS11では、角度の設定が終了したか否かを判定し、終了した場合(ステップS11:Yes)にはステップS12に進み、それ以外の場合(ステップS11:No)には同様の処理を繰り返す。
【0025】
ステップS12では、ステップS10において設定された角度を取得する。例えば、ステッピングモータによって角度を設定する場合には、エンコーダからの出力値を、角度を示す情報として取得する。
【0026】
ステップS13では、送信回路13が送信アンテナ14から電波を送信する。この結果、送信アンテナ14から送信された電波は、受信アンテナ200によって受信されて対応する電気信号に変換された後、接続ケーブル220を介して送信アンテナ210に供給される。送信アンテナ210は、受信アンテナ200から供給された電気信号を対応する電波に変換してレーダ装置10に送信する。
【0027】
ステップS14では、送信アンテナ210から送信された電波を受信アンテナ15,16によって受信する。この結果、レーダ装置10の送信アンテナ14から送信された電波はその正面方向に配置された受信アンテナ200によって受信されて電気信号に変換され、接続ケーブル220を経由して送信アンテナ210に供給される。送信アンテナ210は、回転ステージ110の角度に応じた方向から電波を送信し、受信アンテナ15,16によって受信する。
【0028】
ステップS15では、演算回路11は、受信回路17から受信アンテナ15,16の受信信号の差であるΔ値を取得する。
【0029】
ステップS16では、演算回路11は、受信回路17から受信アンテナ15,16の受信信号の和であるΣ値を取得する。
【0030】
ステップS17では、演算回路11は、ステップS15,S16でそれぞれ取得したΔ値とΣ値の比Δ/Σを算出する。
【0031】
ステップS18では、演算回路11は、ステップS12で取得した角度θと、ステップS17で算出したΔ/Σとを対応付けして角度変換テーブル12に格納する。なお、角度変換テーブル12への格納処理は、演算回路11ではなく、回転ステージ110を駆動するパーソナルコンピュータによって実行するようにしてもよい。
【0032】
ステップS19では、予め定められた範囲の測定が終了したか否かを判定し、終了したと判定した場合(ステップS19:Yes)には処理を終了し、それ以外の場合(ステップS19:No)にはステップS10に戻って前述の場合と同様の処理を繰り返す。例えば、−60度から+60度の範囲の測定が終了した場合には処理を終了する。
【0033】
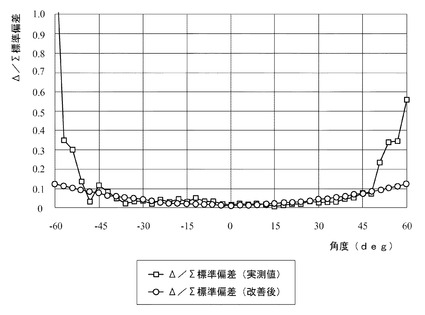
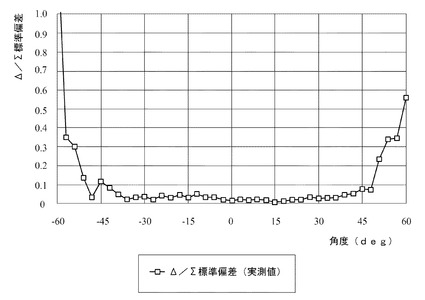
図4は以上の方法によって生成されたディスクリカーブの偏差を示す図である。この図4において、実線を伴う四角は第1実施形態によって測定されたディスクリカーブの角度と標準偏差との関係を示し、実線を伴わない四角は図7に示す従来例によって生成されたディスクリカーブの偏差を示している。これらの比較から、従来の方法では、±45度以上の範囲(−60度から−45度の範囲および+45度から+60度の範囲)において標準偏差が大きくなっているが、第1実施形態によれば±45度以上の範囲においても標準偏差は0.1程度となっており、精度が向上していることが分かる。
【0034】
以上に説明したように、第1実施形態では、接続ケーブル220によって相互に接続された受信アンテナ200と送信アンテナ210を配置するとともに、回転ステージ110に回転ステージ110に配置した。そして、受信アンテナ200は回転ステージ110の回転に応じて移動させてレーダ装置10の正面方向に常に位置させるとともに、送信アンテナ210についてはその位置を固定するようにした。このような方法によれば、送信アンテナ14から送信される電波は常に正面方向に対向配置された受信アンテナ200によって受信されることから、回転ステージ110の角度をどのように設定した場合であっても、送信アンテナ14の正面方向(レンジ方向)から送信される電波が受信アンテナ200によって受信されることから、送信アンテナ14の指向性が低い範囲(±45度以上の範囲)の影響を受けないことから、精度の高い角度変換テーブル12を生成することができる。
【0035】
(C)実施形態の第2実施形態の構成の説明
図5は第2実施形態の構成を説明するための図である。なお、この図において、図1と対応する部分には同一の符号を付してその説明を省略する。第2実施形態では、回転ステージ110が除外され、レーダ装置10が、例えば、電波暗室100の壁等に固定して配置されている。もちろん、壁に固定するのではなくテーブル等に載置するようにしてもよい。また、第2実施形態では、受信アンテナ200がレーダ装置10の正面方向に受信面がレーダ装置10に対向するように固定して配置されている。さらに、送信アンテナ210は、送信面をレーダ装置10の方向を向けたままで、レーダ装置10を中心とした円周に沿って敷設されたレール300に沿って移動するように配置されている。なお、レーダ装置10を中心として送信アンテナ210と受信アンテナ200の間に形成される角度をθとする。なお、それ以外の構成は、図1の場合と同様である。
【0036】
(D)実施形態の第2実施形態の動作の説明
つぎに、第2実施形態の動作について説明する。第2実施形態では、角度変換テーブル12を作成する際の処理は、図3の場合と同様である。第2実施形態では、レーダ装置10の送信アンテナ14から送信された電波は、レーダ装置10の正面方向に対向して配置されている受信アンテナ200によって受信され、対応する電気信号に変換されて接続ケーブル220を介して送信アンテナ210に供給される。送信アンテナ210は、受信アンテナ200から供給された電気信号を対応する電波に変換して送信する。レーダ装置10では、送信アンテナ210から送信された電波を受信アンテナ15,16によって受信する。受信アンテナ200は、レーダ装置10の正面方向に対向して配置されるので、送信アンテナ14から送信された電波は、0度の角度で受信アンテナ200に入射されるため、送信アンテナ14の角度特性の影響を受けにくい。一方、送信アンテナ210は、レール300によってレーダ装置10を中心とする円周上を、その送信面を常にレーダ装置10に向けるようにして移動されるので、受信アンテナ15,16はその位置に応じた角度からの電波を受信する。そして、受信した電波に基づいて角度変換テーブル12を生成する。
【0037】
以上の第2実施形態によれば、第1実施形態の場合と同様に、送信アンテナ14の特性に影響を受けることなく、精度が高い角度変換テーブル12を生成することができる。
【0038】
(E)変形実施形態の説明
以上の実施形態は一例であって、本発明が上述したような場合のみに限定されるものでないことはいうまでもない。例えば、以上の各実施形態では、受信アンテナ200と送信アンテナ210とは接続ケーブル220によって直接接続するようにしたが、例えば、これらの間に電力を増幅する増幅器を設け、受信アンテナ200から供給される信号を増幅して送信アンテナ210に供給するようにしてもよい。そのような構成によれば、増幅器の利得を調整して、送信アンテナ210から送信される電波の強度が最適になるように設定することで、ノイズの影響を低減してさらに精度の高い角度変換テーブル12を作成することができる。
【0039】
また、以上の各実施形態では、受信アンテナ200および送信アンテナ210としては、狭い指向性を有するホーンアンテナを用いるようにしたが、これ以外のアンテナを用いるようにしてもよいことは言うまでもない。
【0040】
また、以上の各実施形態では、受信アンテナ200および送信アンテナ210の間にアイソレータを設け、受信アンテナ200から送信アンテナ210に供給される信号のみを選択的に通過させるようにしてもよい。
【0041】
また、図3に示す処理では、角度の設定ステップについては言及していないが、例えば、1〜3度程度のステップで角度を変化させて角度変換テーブル12を生成することができる。なお、ディスクリカーブの傾きに応じて、角度のステップを調整するようにしてもよい。具体的には、角度が大きい場合にディスクリカーブの傾きが大きくなることから、例えば、±40度未満の場合は5度程度のステップで角度を設定し、±40度以上の場合は2度程度のステップで角度を設定するようにしてもよい。
【0042】
また、広角範囲のみディスクリカーブを取得し、狭角範囲のディスクリカーブは適当な近似を行うことで補間を行うことができる。例えば、±40度以上の場合のみ角度特性測定を行い、±40度未満の範囲のディスクリカーブはθ=atan(Δ/Σ)等の近似式で近似を行ってもよい。なお、atan()は、括弧内のアークタンジェント(逆正接)を与える関数である。
【符号の説明】
【0043】
10 レーダ装置
11 演算回路
12 角度変換テーブル
13 送信回路
14 送信アンテナ
15,16 受信アンテナ
17 受信回路
100 電波暗室
110 回転ステージ
200 受信アンテナ
210 送信アンテナ
220 接続ケーブル
300 レール
【技術分野】
【0001】
本発明は、角度特性測定方法およびレーダ装置に関するものである。
【背景技術】
【0002】
特許文献1には、位相モノパルス方式のレーダ装置に関する技術が開示されている。このような位相モノパルス方式のレーダ装置では、送信アンテナから電波を送信し、対象によって反射された電波を複数の受信アンテナによって受信し、これら複数の受信アンテナによって受信された信号の位相差に基づいて対象とレーダ装置との間の角度を検出する。
【0003】
図6は、位相モノパルス方式のレーダ装置の動作原理を示している。位相モノパルス方式のレーダ装置では、レーダ装置が搭載された車両Vから対象Sに対して電波を送信し、その反射波を2つの受信アンテナによって受信し、これらの和信号(Σ)と差信号(Δ)とを求める。そして、和信号と差信号の比(Δ/Σ)を求め、対象とレーダ装置との間の角度と、前述した比(Δ/Σ)との対応関係を示す情報が予め格納されている角度変換テーブルを参照し、対象Sとの角度θを検出する。
【0004】
ここで、前述した角度変換テーブルを作成する場合、従来は、図7に示すような方法が採用されていた。すなわち、電波暗室100内に反射物120を配置するとともに、反射物から所定の距離隔てた位置に回転ステージ110を配置する。そして、回転ステージ110上に測定しようとするレーダ装置10を載置し、回転ステージ110を回転させながらレーダ装置10から電波を送信し、反射物120によって反射された電波を受信し、前述した和信号と差信号の比(Δ/Σ)を求める。そして、それぞれの角度において測定された比の値と、角度とを対応付けて格納することにより、角度変換テーブルを得ることができる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2010−223649号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、前述した方法によって角度変換テーブルを作成する場合、図6に示すような受信アンテナの特性に基づく信号の変化を測定する必要があるが、送信アンテナ自体も角度によって指向特性が変化する。このため、特に、反射物120との間の角度が大きい場合(特に、45度以上の場合)には、送信信号の強度が低下するため、受信信号が減少してノイズの影響を受けやすくなることから、測定値が誤差を含んでしまうという問題がある。図8は、図7に示す方法によって得られたディスクリカーブのばらつきを示す図である。この図に示すように、複数回の測定によって生成されたディスクリカーブは、45度以上の角度において、ばらつきが非常に大きくなっている。
【0007】
そこで、本発明は誤差の少ない角度変換テーブルを作成することが可能な角度特性測定方法およびこのような方法で作成された角度変換テーブルを用いたレーダ装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記課題を解決するために、本発明は、レーダ装置の角度特性測定方法において、前記レーダ装置から送信される信号を受信する受信アンテナと、前記受信アンテナによって受信した信号を前記レーダ装置に向けて送信する送信アンテナを配置し、前記受信アンテナを前記レーダ装置の正面方向に常に位置させるとともに、前記送信アンテナと前記正面方向との間の角度θが所定の範囲で変化するように、前記受信アンテナ、前記送信アンテナ、および、前記レーダ装置の相対的な位置関係を調整し、前記角度θを変化させながら前記レーダ装置から信号を送信し、前記受信アンテナで受信されて前記送信アンテナから送信された信号を前記レーダ装置で受信して受信信号の変化を測定することで前記角度特性を測定する、ことを特徴とする。
このような方法によれば、誤差の少ない角度変換テーブルを作成することが可能となる。
【0009】
また、他の発明は、上記発明に加えて、前記送信アンテナの位置を固定し、前記レーダ装置を回転ステージ上に載置して回転させるとともに、前記受信アンテナを前記回転ステージの回転に応じて前記回転ステージの回転軸を中心とする円周上を移動させることにより、前記受信アンテナを前記レーダ装置の正面方向に常に位置させることを特徴とする。
このような方法によれば、受信アンテナ、送信アンテナ、および、レーダ装置の相対的な位置関係を正確に調整することで、角度特性を正確に測定することが可能になる。
【0010】
また、他の発明は、上記発明に加えて、前記レーダ装置および前記受信アンテナの位置を固定し、前記送信アンテナを前記レーダ装置を中心とする円周上を移動させることにより、前記送信アンテナと前記正面方向との間の角度θが所定の範囲で変化するようにすることを特徴とする。
このような方法によれば、受信アンテナ、送信アンテナ、および、レーダ装置の相対的な位置関係を正確に調整することで、角度特性を正確に測定することが可能になる。
【0011】
また、他の発明は、上記発明に加えて、前記受信アンテナによって受信した信号を所定の利得で増幅し、前記送信アンテナに供給することを特徴とする。
このような構成によれば、利得を調整することにより、ノイズの影響を抑えて、さらに正確な角度変換テーブルを生成することができる。
【0012】
また、本発明は、前述した角度特性測定方法によって測定された角度特性に基づいて作成された受信信号と角度の関係を示すテーブルを有するレーダ装置である。
このようなレーダ装置によれば、対象との間の角度を正確に検出することができる。
【発明の効果】
【0013】
本発明によれば、本発明は誤差の少ない角度変換テーブルを作成することが可能な角度特性測定方法およびこのような方法で作成された角度変換テーブルを用いたレーダ装置を提供することが可能となる。
【図面の簡単な説明】
【0014】
【図1】本発明の第1実施形態に係る角度特性測定方法の実現方法を示す図である。
【図2】図1に示すレーダ装置の詳細な構成例を示す図である。
【図3】図1に示す第1実施形態において実行される処理の流れを説明するフローチャートである。
【図4】図1に示す第1実施形態によって測定されたディスクリカーブの標準偏差を示す図である。
【図5】本発明の第2実施形態に係る角度特性測定方法の実現方法を示す図である。
【図6】位相モノパルス方式のレーダ装置の動作原理を説明するための図である。
【図7】従来の角度特性測定方法を説明するための図である。
【図8】従来の角度特性測定方法によって測定されたディスクリカーブの標準偏差を示す図である。
【発明を実施するための形態】
【0015】
次に、本発明の実施形態について説明する。
【0016】
(A)実施形態の第1実施形態の構成の説明
図1は、本発明の第1実施形態の角度特性測定方法を説明するための図である。第1実施形態では、測定装置は、壁面から反射する電波の影響を防ぐために電波暗室100内に配置されている。また、図1に示す例は、回転ステージ110、受信アンテナ200、送信アンテナ210、および、接続ケーブル220を有している。
【0017】
ここで、角度変換テーブルを作成する対象となるレーダ装置10は回転ステージ110の上に載置される。なお、本明細書中において、角度変換テーブルとは、対象とレーダ装置10との間の角度と、和(Σ)信号と差(Δ)信号の比(Δ/Σ)との関係を示す情報を格納したテーブルをいう。なお、角度変換テーブルに格納されている、対象とレーダ装置10との間の角度と、和(Σ)信号と差(Δ)信号の比(Δ/Σ)との関係を示す情報は、ディスクリカーブとも呼ばれる。レーダ装置10は、電波を送信し、対象によって反射された反射波の和信号と差信号の比を求め、この和信号と差信号の比(Δ/Σ)に対応する角度を角度変換テーブルから検索することで、対象とレーダ装置との間の角度を検出することができる。
【0018】
回転ステージ110は、例えば、ステッピングモータによって回転軸が駆動されて任意の角度に回転される。また、回転ステージ110の回転軸にはロータリーエンコーダが取り付けられており、このロータリーエンコーダからの出力がパーソナルコンピュータに供給される。パーソナルコンピュータは、ロータリーエンコーダからの出力を参照して、ステッピングモータを制御することにより、回転ステージ110を所望の角度に回転させる。
【0019】
受信アンテナ200は、例えば、ホーンアンテナによって構成され、レーダ装置10の正面方向にその受信面が常に向くように配置される。なお、レーダ装置10の正面方向とは、レーダ装置10が有する送信アンテナのレンジ方向をいう。例えば、レーダ装置10の送信アンテナがパッチアンテナである場合には、パッチアンテナの法線方向を正面方向(レンジ方向)とすることができる。受信アンテナ200は、回転ステージ110の回転軸を中心とする円の円周上を、回転ステージ110の回転に応じて、そのレンジ方向をレーダ装置10の正面方向を常に向くようにして移動される。具体的な実現方法としては、例えば、回転ステージ110にその径方向に伸びる棒状部材を取り付け、この棒状部材の先端部分に受信アンテナ200をそのレンジ方向をレーダ装置10のレンジ方向に向けて取り付けることにより実現できる。受信アンテナ200は、レーダ装置10から送信された電波を受信して対応する電気信号に変換し、接続ケーブル220を介して送信アンテナ210に供給する。
【0020】
送信アンテナ210は、例えば、ホーンアンテナによって構成され、回転ステージ110の回転角度が0度の場合において、レーダ装置10の正面方向にレンジ方向が向くように配置される。送信アンテナ210は、受信アンテナ200から供給される電気信号に応じた電波をレーダ装置10に向けて送信する。なお、図1に示すように、送信アンテナ210からレーダ装置10を介して受信アンテナ200との間の角度をθとする。
【0021】
図2は、レーダ装置10の構成例を示す図である。この図に示すように、レーダ装置10は、演算回路11、角度変換テーブル12、送信回路13、送信アンテナ14、受信アンテナ15,16、および、受信回路17を有している。送信回路13は、パルス信号を生成して送信アンテナ14を介して送信する。送信アンテナ14は、送信回路13から供給される電気信号に応じた電波を送出する。受信アンテナ15,16は、それぞれ異なる特性を有するアンテナであり、送信アンテナ14から送信され、対象によって反射された電波を受信して対応する電気信号を出力する。受信回路17は、受信アンテナ15,16から出力される電気信号から和信号としてのΣ信号と、差信号としてのΔ信号を生成し、これらの比の信号Δ/Σを生成して出力する。演算回路11は、受信回路17から出力される比信号Δ/Σを入力し、角度変換テーブル12を参照して対象との角度を演算する。角度変換テーブル12は、比信号Δ/Σと角度θとの関係を示す情報を格納している。なお、本実施形態では、この角度変換テーブル12を作成するための情報を測定する。
【0022】
(B)実施形態の第1実施形態の動作の説明
つぎに、第1実施形態の動作について説明する。図3は角度変換テーブル12を生成する際に実行される処理の一例を説明するためのフローチャートである。このフローチャートの処理が開始されると、以下のステップが実行される。
【0023】
ステップS10では、回転ステージ110の角度が設定される。ここで、回転ステージ110の角度の設定方法としては、例えば、回転ステージ110を駆動するステッピングモータをパーソナルコンピュータによって駆動し、回転ステージ110の角度を検出するエンコーダからの出力を参照することで、所望の角度に設定することができる。角度の範囲としては、レーダ装置10が送信アンテナ210に対向したときの角度を0度(図1におけるθ=0)とした場合に、−60度から+60度の範囲とすることができる。もちろん、これ以外の範囲でもよい。なお、ステッピングモータを用いるのではなく、手動で角度を設定するようにしてもよい。
【0024】
ステップS11では、角度の設定が終了したか否かを判定し、終了した場合(ステップS11:Yes)にはステップS12に進み、それ以外の場合(ステップS11:No)には同様の処理を繰り返す。
【0025】
ステップS12では、ステップS10において設定された角度を取得する。例えば、ステッピングモータによって角度を設定する場合には、エンコーダからの出力値を、角度を示す情報として取得する。
【0026】
ステップS13では、送信回路13が送信アンテナ14から電波を送信する。この結果、送信アンテナ14から送信された電波は、受信アンテナ200によって受信されて対応する電気信号に変換された後、接続ケーブル220を介して送信アンテナ210に供給される。送信アンテナ210は、受信アンテナ200から供給された電気信号を対応する電波に変換してレーダ装置10に送信する。
【0027】
ステップS14では、送信アンテナ210から送信された電波を受信アンテナ15,16によって受信する。この結果、レーダ装置10の送信アンテナ14から送信された電波はその正面方向に配置された受信アンテナ200によって受信されて電気信号に変換され、接続ケーブル220を経由して送信アンテナ210に供給される。送信アンテナ210は、回転ステージ110の角度に応じた方向から電波を送信し、受信アンテナ15,16によって受信する。
【0028】
ステップS15では、演算回路11は、受信回路17から受信アンテナ15,16の受信信号の差であるΔ値を取得する。
【0029】
ステップS16では、演算回路11は、受信回路17から受信アンテナ15,16の受信信号の和であるΣ値を取得する。
【0030】
ステップS17では、演算回路11は、ステップS15,S16でそれぞれ取得したΔ値とΣ値の比Δ/Σを算出する。
【0031】
ステップS18では、演算回路11は、ステップS12で取得した角度θと、ステップS17で算出したΔ/Σとを対応付けして角度変換テーブル12に格納する。なお、角度変換テーブル12への格納処理は、演算回路11ではなく、回転ステージ110を駆動するパーソナルコンピュータによって実行するようにしてもよい。
【0032】
ステップS19では、予め定められた範囲の測定が終了したか否かを判定し、終了したと判定した場合(ステップS19:Yes)には処理を終了し、それ以外の場合(ステップS19:No)にはステップS10に戻って前述の場合と同様の処理を繰り返す。例えば、−60度から+60度の範囲の測定が終了した場合には処理を終了する。
【0033】
図4は以上の方法によって生成されたディスクリカーブの偏差を示す図である。この図4において、実線を伴う四角は第1実施形態によって測定されたディスクリカーブの角度と標準偏差との関係を示し、実線を伴わない四角は図7に示す従来例によって生成されたディスクリカーブの偏差を示している。これらの比較から、従来の方法では、±45度以上の範囲(−60度から−45度の範囲および+45度から+60度の範囲)において標準偏差が大きくなっているが、第1実施形態によれば±45度以上の範囲においても標準偏差は0.1程度となっており、精度が向上していることが分かる。
【0034】
以上に説明したように、第1実施形態では、接続ケーブル220によって相互に接続された受信アンテナ200と送信アンテナ210を配置するとともに、回転ステージ110に回転ステージ110に配置した。そして、受信アンテナ200は回転ステージ110の回転に応じて移動させてレーダ装置10の正面方向に常に位置させるとともに、送信アンテナ210についてはその位置を固定するようにした。このような方法によれば、送信アンテナ14から送信される電波は常に正面方向に対向配置された受信アンテナ200によって受信されることから、回転ステージ110の角度をどのように設定した場合であっても、送信アンテナ14の正面方向(レンジ方向)から送信される電波が受信アンテナ200によって受信されることから、送信アンテナ14の指向性が低い範囲(±45度以上の範囲)の影響を受けないことから、精度の高い角度変換テーブル12を生成することができる。
【0035】
(C)実施形態の第2実施形態の構成の説明
図5は第2実施形態の構成を説明するための図である。なお、この図において、図1と対応する部分には同一の符号を付してその説明を省略する。第2実施形態では、回転ステージ110が除外され、レーダ装置10が、例えば、電波暗室100の壁等に固定して配置されている。もちろん、壁に固定するのではなくテーブル等に載置するようにしてもよい。また、第2実施形態では、受信アンテナ200がレーダ装置10の正面方向に受信面がレーダ装置10に対向するように固定して配置されている。さらに、送信アンテナ210は、送信面をレーダ装置10の方向を向けたままで、レーダ装置10を中心とした円周に沿って敷設されたレール300に沿って移動するように配置されている。なお、レーダ装置10を中心として送信アンテナ210と受信アンテナ200の間に形成される角度をθとする。なお、それ以外の構成は、図1の場合と同様である。
【0036】
(D)実施形態の第2実施形態の動作の説明
つぎに、第2実施形態の動作について説明する。第2実施形態では、角度変換テーブル12を作成する際の処理は、図3の場合と同様である。第2実施形態では、レーダ装置10の送信アンテナ14から送信された電波は、レーダ装置10の正面方向に対向して配置されている受信アンテナ200によって受信され、対応する電気信号に変換されて接続ケーブル220を介して送信アンテナ210に供給される。送信アンテナ210は、受信アンテナ200から供給された電気信号を対応する電波に変換して送信する。レーダ装置10では、送信アンテナ210から送信された電波を受信アンテナ15,16によって受信する。受信アンテナ200は、レーダ装置10の正面方向に対向して配置されるので、送信アンテナ14から送信された電波は、0度の角度で受信アンテナ200に入射されるため、送信アンテナ14の角度特性の影響を受けにくい。一方、送信アンテナ210は、レール300によってレーダ装置10を中心とする円周上を、その送信面を常にレーダ装置10に向けるようにして移動されるので、受信アンテナ15,16はその位置に応じた角度からの電波を受信する。そして、受信した電波に基づいて角度変換テーブル12を生成する。
【0037】
以上の第2実施形態によれば、第1実施形態の場合と同様に、送信アンテナ14の特性に影響を受けることなく、精度が高い角度変換テーブル12を生成することができる。
【0038】
(E)変形実施形態の説明
以上の実施形態は一例であって、本発明が上述したような場合のみに限定されるものでないことはいうまでもない。例えば、以上の各実施形態では、受信アンテナ200と送信アンテナ210とは接続ケーブル220によって直接接続するようにしたが、例えば、これらの間に電力を増幅する増幅器を設け、受信アンテナ200から供給される信号を増幅して送信アンテナ210に供給するようにしてもよい。そのような構成によれば、増幅器の利得を調整して、送信アンテナ210から送信される電波の強度が最適になるように設定することで、ノイズの影響を低減してさらに精度の高い角度変換テーブル12を作成することができる。
【0039】
また、以上の各実施形態では、受信アンテナ200および送信アンテナ210としては、狭い指向性を有するホーンアンテナを用いるようにしたが、これ以外のアンテナを用いるようにしてもよいことは言うまでもない。
【0040】
また、以上の各実施形態では、受信アンテナ200および送信アンテナ210の間にアイソレータを設け、受信アンテナ200から送信アンテナ210に供給される信号のみを選択的に通過させるようにしてもよい。
【0041】
また、図3に示す処理では、角度の設定ステップについては言及していないが、例えば、1〜3度程度のステップで角度を変化させて角度変換テーブル12を生成することができる。なお、ディスクリカーブの傾きに応じて、角度のステップを調整するようにしてもよい。具体的には、角度が大きい場合にディスクリカーブの傾きが大きくなることから、例えば、±40度未満の場合は5度程度のステップで角度を設定し、±40度以上の場合は2度程度のステップで角度を設定するようにしてもよい。
【0042】
また、広角範囲のみディスクリカーブを取得し、狭角範囲のディスクリカーブは適当な近似を行うことで補間を行うことができる。例えば、±40度以上の場合のみ角度特性測定を行い、±40度未満の範囲のディスクリカーブはθ=atan(Δ/Σ)等の近似式で近似を行ってもよい。なお、atan()は、括弧内のアークタンジェント(逆正接)を与える関数である。
【符号の説明】
【0043】
10 レーダ装置
11 演算回路
12 角度変換テーブル
13 送信回路
14 送信アンテナ
15,16 受信アンテナ
17 受信回路
100 電波暗室
110 回転ステージ
200 受信アンテナ
210 送信アンテナ
220 接続ケーブル
300 レール
【特許請求の範囲】
【請求項1】
レーダ装置の角度特性測定方法において、
前記レーダ装置から送信される信号を受信する受信アンテナと、前記受信アンテナによって受信した信号を前記レーダ装置に向けて送信する送信アンテナを配置し、
前記受信アンテナを前記レーダ装置の正面方向に常に位置させるとともに、前記送信アンテナと前記正面方向との間の角度θが所定の範囲で変化するように、前記受信アンテナ、前記送信アンテナ、および、前記レーダ装置の相対的な位置関係を調整し、前記角度θを変化させながら前記レーダ装置から信号を送信し、前記受信アンテナで受信されて前記送信アンテナから送信された信号を前記レーダ装置で受信して受信信号の変化を測定することで前記角度特性を測定する、
ことを特徴とする角度特性測定方法。
【請求項2】
前記送信アンテナの位置を固定し、前記レーダ装置を回転ステージ上に載置して回転させるとともに、前記受信アンテナを前記回転ステージの回転に応じて前記回転ステージの回転軸を中心とする円周上を移動させることにより、前記受信アンテナを前記レーダ装置の正面方向に常に位置させることを特徴とする請求項1に記載の角度特性測定方法。
【請求項3】
前記レーダ装置および前記受信アンテナの位置を固定し、前記送信アンテナを前記レーダ装置を中心とする円周上を移動させることにより、前記送信アンテナと前記正面方向との間の角度θが所定の範囲で変化するようにすることを特徴とする請求項1に記載の角度特性測定方法。
【請求項4】
前記受信アンテナによって受信した信号を所定の利得で増幅し、前記送信アンテナに供給することを特徴とする請求項1乃至3のいずれか1項に記載の角度特性測定方法。
【請求項5】
請求項1乃至4のいずれか1項に記載の角度特性測定方法によって測定された角度特性に基づいて作成された受信信号と角度の関係を示すテーブルを有するレーダ装置。
【請求項1】
レーダ装置の角度特性測定方法において、
前記レーダ装置から送信される信号を受信する受信アンテナと、前記受信アンテナによって受信した信号を前記レーダ装置に向けて送信する送信アンテナを配置し、
前記受信アンテナを前記レーダ装置の正面方向に常に位置させるとともに、前記送信アンテナと前記正面方向との間の角度θが所定の範囲で変化するように、前記受信アンテナ、前記送信アンテナ、および、前記レーダ装置の相対的な位置関係を調整し、前記角度θを変化させながら前記レーダ装置から信号を送信し、前記受信アンテナで受信されて前記送信アンテナから送信された信号を前記レーダ装置で受信して受信信号の変化を測定することで前記角度特性を測定する、
ことを特徴とする角度特性測定方法。
【請求項2】
前記送信アンテナの位置を固定し、前記レーダ装置を回転ステージ上に載置して回転させるとともに、前記受信アンテナを前記回転ステージの回転に応じて前記回転ステージの回転軸を中心とする円周上を移動させることにより、前記受信アンテナを前記レーダ装置の正面方向に常に位置させることを特徴とする請求項1に記載の角度特性測定方法。
【請求項3】
前記レーダ装置および前記受信アンテナの位置を固定し、前記送信アンテナを前記レーダ装置を中心とする円周上を移動させることにより、前記送信アンテナと前記正面方向との間の角度θが所定の範囲で変化するようにすることを特徴とする請求項1に記載の角度特性測定方法。
【請求項4】
前記受信アンテナによって受信した信号を所定の利得で増幅し、前記送信アンテナに供給することを特徴とする請求項1乃至3のいずれか1項に記載の角度特性測定方法。
【請求項5】
請求項1乃至4のいずれか1項に記載の角度特性測定方法によって測定された角度特性に基づいて作成された受信信号と角度の関係を示すテーブルを有するレーダ装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2012−211794(P2012−211794A)
【公開日】平成24年11月1日(2012.11.1)
【国際特許分類】
【出願番号】特願2011−76926(P2011−76926)
【出願日】平成23年3月31日(2011.3.31)
【出願人】(000005290)古河電気工業株式会社 (4,457)
【出願人】(391045897)古河AS株式会社 (571)
【Fターム(参考)】
【公開日】平成24年11月1日(2012.11.1)
【国際特許分類】
【出願日】平成23年3月31日(2011.3.31)
【出願人】(000005290)古河電気工業株式会社 (4,457)
【出願人】(391045897)古河AS株式会社 (571)
【Fターム(参考)】
[ Back to top ]