
角速度センサ検査用テーブル装置
【課題】短サイクルタイムで角速度センサの温度特性を検査できるようにする。
【解決手段】角速度センサ検査用テーブル装置において、角速度を得る為のモータ10の出力軸に回転プレート20を配置し、この回転プレート10上に角速度センサ2を配置し、更に回転プレート20上に温度調整ユニット30を配置する。温度調整ユニット30は、角速度センサ2と直接又は間接的に接触して温度制御する。回転プレート20及び温度調整ユニット30を角速度センサ2と共に連続回転させながら、角速度センサ2の信号特性を検査する。
【解決手段】角速度センサ検査用テーブル装置において、角速度を得る為のモータ10の出力軸に回転プレート20を配置し、この回転プレート10上に角速度センサ2を配置し、更に回転プレート20上に温度調整ユニット30を配置する。温度調整ユニット30は、角速度センサ2と直接又は間接的に接触して温度制御する。回転プレート20及び温度調整ユニット30を角速度センサ2と共に連続回転させながら、角速度センサ2の信号特性を検査する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、角速度センサを特定の温度に維持しながら回転させて、信号特性を検査する角速度検査装置に関する。
【背景技術】
【0002】
角速度を検出可能なセンサ(以下、角速度センサ)は、様々な場面で利用されるようになっている。この角速度センサには、角速度のみを検出するいわゆるジャイロセンサの他に、角速度と加速度を複合的に検出できる複合型センサ等が存在している。
【0003】
角速度センサの信号は、周囲の温度によって変動する場合があり、車載品や高精度品については、出荷前にその温度特性を全品検査する必要がある。従来、角速度センサの温度特性を検査する場合、恒温槽内に回転プレートを設置して、この回転プレート上に角速度センサを配置し、この恒温槽内を特定の温度に維持しながら、角速度センサを回転させて信号特性を検査している。
【0004】
具体的には、回転プレート上に試験基板が設置され、この試験基板の複数のソケットに角速度センサがセットされる。試験基板には、角速度センサの設置個数(ソケット個数)に対応した出力配線が設けられる。この出力配線は恒温槽の外部に取り出されて、計測器に接続される。この計測器によって信号特性が検査される。
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、この従来の検査装置では、恒温槽内の温度が安定するまでに、30分から60分の時間を要するため、角速度センサの検査サイクルタイム(例えば、1個あたり5秒〜15秒)を実現するためには、試験基板を大型化し、膨大な数の角速度センサを予めセットして同時に検査する必要があった。この結果、試験基板の設計・製作に多大な費用がかかり、また、膨大な数のソケットにおける角速度センサとのコンタクト性能を常に最適に維持・管理しなければならないという問題があった。また、検査装置全体も大型化し、恒温槽への試験基板の出し入れ作業に時間を要するという問題があった。
【0006】
また、従来の検査装置では、温度依存特性を検査するには、多段階の温度で検査する必要があるので、試験を開始したら数時間は恒温槽から部品を取り出すことが出来ない。従って、試験基板や角速度センサに不具合が生じても、その対応が遅れがちになってしまうという問題があった。
【0007】
更に、試験基板が大型化することから、恒温槽内に無駄な空間が生じてしまう。従って、角速度センサが本来必要とする熱量に対して、恒温槽内の空気(空間)や試験基板の温度が安定するために必要な熱量が非常に大きくなり、電気消費量や冷却水の消費量に無駄が多いという問題があった。
【0008】
恒温槽内の温度を均一化するためには、内部の空気を循環させる必要がある。しかし実際には、内部の空気を循環させても、広範囲に亘って温度を均一にすることは困難となる。今後、温度特性を高精度に検査するためには、各角速度センサの温度を0.5度〜1.0度の誤差内に制御する必要があるが、そのためには恒温槽の熱源や内部の循環ファンの容量を増大させなければならないことから、より一層、電力消費量が増大することが懸念された。
【0009】
更にまた、恒温槽内の回転プレートを駆動するモータは、温度上の制約から、恒温槽の外部に配置する必要があるため、恒温槽の内外を駆動軸が貫通する必要があり、恒温槽が複雑化するという問題があった。
【0010】
本発明は上記問題点に鑑みてなされたものであり、角速度センサ信号の温度依存特性を検査するために好適な角速度センサ検査用テーブル装置を提供することを目的としている。
【課題を解決するための手段】
【0011】
上記目的を達成する本発明は、特定の温度に維持される角速度センサを回転させて信号特性を検査する角速度センサ検査用テーブル装置であって、角速度を得る為のモータと、前記モータの出力軸に連結される回転プレートと、前記回転プレートと一緒に回転する状態で配置される前記角速度センサと、前記回転プレート上に配置されて前記角速度センサと直接又は間接的に接触し、前記角速度センサの温度を調整する温度調整ユニットと、を備え、前記回転プレート及び前記温度調整ユニットを前記角速度センサと共に一方向に連続回転させながら、前記角速度センサの信号特性を検査することを特徴とする角速度センサ検査用テーブル装置である。
【0012】
上記角速度センサ検査用テーブル装置では、更に、前記回転プレートの重心が、前記モータの出力軸の回転中心と略一致することを特徴とすることが好ましい。
【0013】
上記角速度センサ検査用テーブル装置では、更に、前記角速度センサはキャリアにセットされており、前記温度調整ユニットが該キャリアを介して間接的に前記角速度センサを温度制御することを特徴とすることが好ましい。
【0014】
上記角速度センサ検査用テーブル装置では、更に、前記回転プレートと一緒に回転する状態で配置されて、前記角速度センサの端子と接触し、前記角速度センサの前記信号特性を検出する測定ヘッドを備えることを特徴とすることが好ましい。
【0015】
上記角速度センサ検査用テーブル装置では、更に、前記測定ヘッドが、前記角速度センサの端子と接触するコンタクトユニットと、前記コンタクトユニットを前記端子に対して近接及び離反させる昇降ユニットを備えることを特徴とすることが好ましい。
【0016】
上記角速度センサ検査用テーブル装置では、更に、前記昇降ユニットが、前記コンタクトユニットを、前記モータの出力軸と平行方向に昇降させることを特徴とすることが好ましい。
【0017】
上記角速度センサ検査用テーブル装置では、更に、前記回転プレートと一緒に回転する状態で配置されて、前記測定ヘッドを介して前記角速度センサの信号を取得するコントロール基板を備えることを特徴とすることが好ましい。
【0018】
上記角速度センサ検査用テーブル装置では、更に、 前記コントロール基板が、支持部材によって、前記回転プレートから離反した場所に配置されることを特徴とすることが好ましい。
【0019】
上記角速度センサ検査用テーブル装置では、更に、前記キャリアには複数の前記角速度センサが配置されており、前記コントロール基板は、複数の前記角速度センサの各信号を取得して1つの通信信号に統合し、前記通信信号を外部へ出力することを特徴とすることが好ましい。
【0020】
上記角速度センサ検査用テーブル装置では、更に、前記モータは中空構造であり、前記モータの内部を貫通して前記温度制御ユニットに対して冷熱又は温熱の熱源が供給されることを特徴とすることが好ましい。
【0021】
上記角速度センサ検査用テーブル装置では、更に、前記モータはダイレクトドライブモータであることを特徴とすることが好ましい。
【0022】
上記角速度センサ検査用テーブル装置では、更に、前記角速度センサの温度状況を測定可能な温度センサを備えることを特徴とすることが好ましい。
【0023】
上記角速度センサ検査用テーブル装置では、更に、前回転プレートには、校正済みの基準角速度センサが配置されており、該基準角速度センサが該回転プレートの角速度を検出することを特徴とすることが好ましい。
【0024】
上記角速度センサ検査用テーブル装置では、更に、前記回転プレートと一緒に回転する状態で配置され、前記角速度センサの側面に当接することで、前記コンタクトユニットに対する該角速度センサの位置を規制するセンタリングユニットを備えることを特徴とすることが好ましい。
【0025】
上記角速度センサ検査用テーブル装置では、更に、前記測定ヘッドにおける前記昇降ユニットは、電気的駆動源を動力にして前記コンタクトユニットを昇降させることを特徴とすることが好ましい。
【0026】
上記角速度センサ検査用テーブル装置では、更に、前記回転プレートと一緒に回転する状態で配置され、前記角速度センサの周囲を取り囲む防風カバーを備えることを特徴とすることが好ましい。
【発明の効果】
【0027】
本発明の角速度センサ検査用テーブル装置によれば、回転テーブル上に配置されて共に回転する温度調整ユニットによって角速度センサを直接又は間接的に温度制御するので、恒温槽が不要となり、高精度且つ高速で検査できるという優れた効果を奏し得る。
【図面の簡単な説明】
【0028】
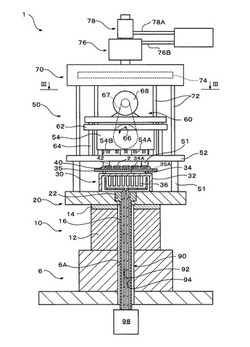
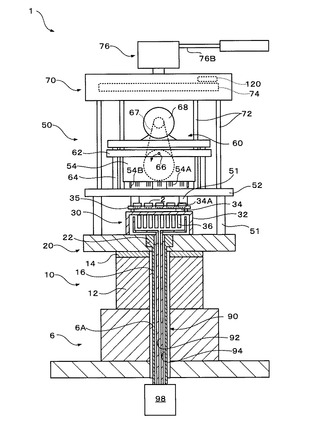
【図1】本発明の実施形態に係る角速度検査用テーブル装置の全体構造を示す正面図である。
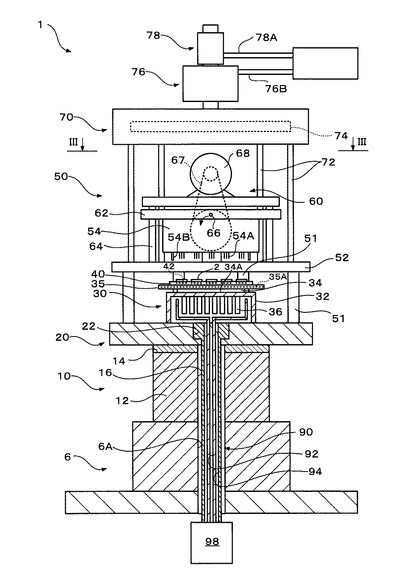
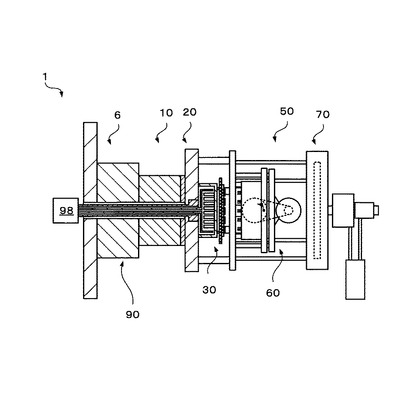
【図2】同角速度検査用テーブル装置の全体構造を示す側面図である。
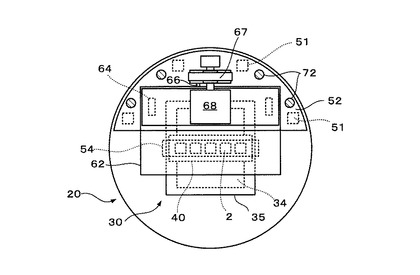
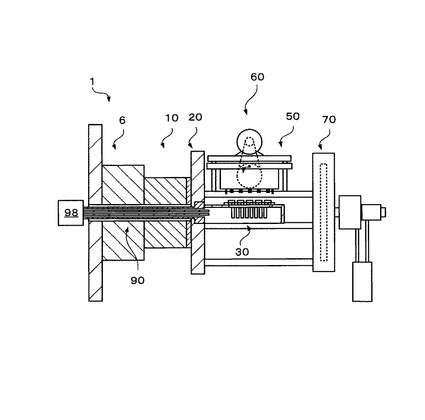
【図3】図1のIII−III矢視断面図である。
【図4】複数の角速度検査用テーブル装置が連なって配置される角速度連続検査装置の構成例を示す図である。
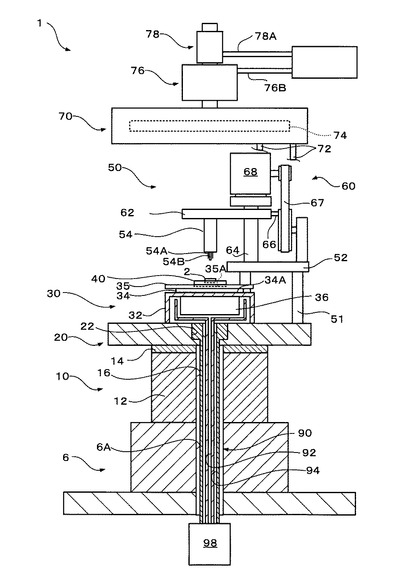
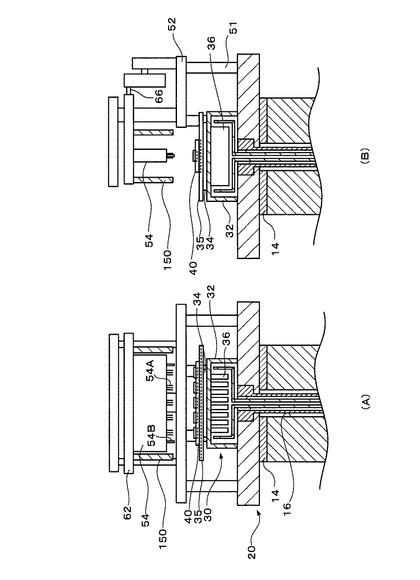
【図5】角速度検査用テーブル装置の他の構成例を示す図である。
【図6】角速度検査用テーブル装置の他の構成例を示す図である。
【図7】角速度検査用テーブル装置の他の構成例を示す図である。
【図8】角速度検査用テーブル装置の他の構成例を示す図である。
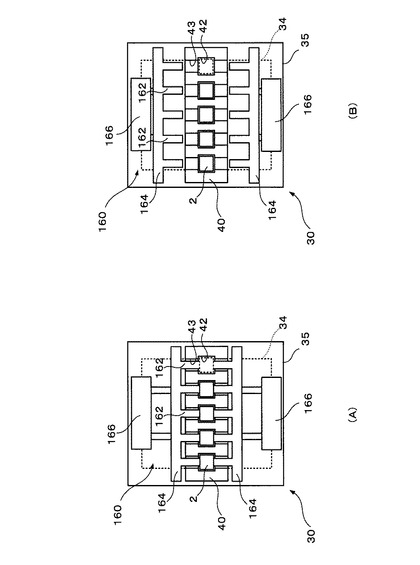
【図9】角速度検査用テーブル装置の他の構成例を示す図である。
【発明を実施するための形態】
【0029】
以下、本発明の実施の形態を添付図面を参照して説明する。
【0030】
図1には、本発明の実施の形態に係る角速度センサ検査用テーブル装置(以下テーブル装置)1の全体構成が示されている。図2にはテーブル装置1の側面図が示されている。図3には、テーブル装置1の回転テーブルを上方から視た場合の断面図が示されている。
【0031】
このテーブル装置1は、角速度センサ2を特定温度に維持しながら回転させて、角速度センサ2の信号特性を検査するものである。テーブル装置1は、角速度を得る為のモータ10と、このモータ10の出力軸14に連結され、自身の重心が出力軸14の回転中心と略一致する回転プレート20を備える。回転プレート20は円盤形状であり、自身の慣性によってモータ10の角速度を安定させる役割を担う。即ち、回転プレート20の直径と重量を大きくすることで、回転中の慣性力を働かせ、モータ10の速度リップルを緩和する。また、このようにすることで、回転プレート20の重心が出力軸14の回転中心と多少ずれていても、定速回転中において慣性モーメントが作用し、速度変動を抑制できる。
【0032】
回転プレート20には、温度調整ユニット30、キャリア40、角速度センサ2、測定ヘッド50、コントロール基板74が配置されている。
【0033】
温度調整ユニット30は、回転プレート20上に固定配置されて回転プレート20と一緒に回転する。この温度調整ユニット30は、筐体32と、この筐体32の上面32A(天井側)に配置されるペルチェ素子34と、筐体32の内部に配置されるヒートシンク36と、ペルチェ素子34の上面に配置される熱伝達プレート35を備えている。筐体内32を水が循環すると、このヒートシンク36を介して、ペルチェ素子34と熱交換が行われる。
【0034】
熱伝達プレート35の上に配置されるキャリア40は帯状プレートであって、上面に形成される複数の凹部42に角速度センサ2が収容される。このキャリア40は、熱伝達プレート35の上面に形成される溝部35A(図2参照)に平面方向から搬入されて載置される。結果、温度調整ユニット30の熱は、キャリア40を介して角速度センサ2に間接的に伝達され、角速度センサ2が温度制御される。後述する測定ヘッド50が下降すると、測定ヘッド50の位置決めピンと54B係合して、キャリア40が位置決めされる。なお、ここではキャリア40を介して角速度センサ2の温度を制御する構造を示したが、温度調整ユニット30(熱伝達プレート35)の上面に角速度センサ2を直接セットして、直接的に温度制御することも可能である。
【0035】
回転プレート20は、中心に貫通孔22が形成されている。また、この回転テーブル20が結合されるモータ10は、本体12及び出力軸14が中空構造となるいわゆる中空モータであり、中心に挿入孔16が形成されている。更に、モータ10を保持する基台6にも貫通孔6Aが形成されている。これらの貫通口22、挿入孔16、貫通孔6Aを纏めて貫通するようにして、液体循環路90が配置される。この液体循環路90の上端は温度調整ユニット30の筐体32に連結される。液体循環路90の下端はロータリージョイント98に連結されて、水が供給される。液体循環路90の内部は二重パイプ構造となっており、中心側は水を供給する為の往路92となり、周囲側は供給した水を回収する復路94となる。従って、ロータリージョイント98から供給される水(又は温水)が、往路92を経由して温度調整ユニット30の筐体32内に供給され、その水は復路94を経由してロータリージョイント98から排出される。
【0036】
測定ヘッド50は、回転テーブル20に立設される4本の脚部51と、この脚部51によって水平方向に支持される台座52と、台座52上に設置される昇降ユニット60と、昇降ユニット60によって昇降されることで角速度センサ2に対して近接・離反するコンタクトユニット54を備える。コンタクトユニット54は、複数のプローブピン54Aが配置されており、キャリア40に配置される複数(例えば10個)の角速度センサ2(図1では便宜上5個に省略)の信号出力端子に同時に当接できるようになっている。
【0037】
昇降ユニット60は、コンタクトユニット54を保持するスライダ62と、このスライダ62を上下方向(軸線方向)に案内する2本のガイド軸64と、スライダ62と係合して、自身の回転によってこのスライダ62を上下方向に移動させるクランク66と、このクランク66をベルト67を介して回転駆動する昇降モータ68を備える。従って、昇降モータ68を所定のタイミングで回転させれば、コンタクトユニット54が上下動する。昇降モータ68は、ガイド軸64の上端を利用して保持するようになっている。なお、ここでは昇降モータ68を利用して上下動させる場合を示したが、本発明はこれに限定されず、電気的なソレノイドを用いて上下動させたり、空気圧や油圧を利用したシリンダによって上下動させたりすることも可能である。
【0038】
更に本実施形態では、キャリア40の上方であって、回転プレート20に対向するような状態で、円形のコントロールボックス70が同軸状態で配置される。このコントロールボックス70は、台座52に立設される4本の支持棒72によって保持されており、内部にコントロール基板74が配置される。このコントロールボックス70の上面には、電源供給用スリップリング76と、通信信号用スリップリング78が配置される。この2つのスリップリング76、78は、外部に設置される電源ライン76Aと通信信号ライン78Aにそれぞれ接触している。
【0039】
コントロール基板74は、電源ライン76Aから電源供給用スリップリング76を介して電源供給を受けて、更にこの電源を、昇降モータ68や温度調整ユニット30のペルチェ素子34の駆動電源に割り当てる。また、コントロール基板74は、通信信号ライン78Aから通信信号用スリップリング78を介して入力される制御信号に基づいて、昇降モータ68を昇降させたり、ペルチェ素子34の温度を制御したり、コンタクトユニット54による10個の角速度センサ2の信号検出を行う。また、コントロール基板74は、検出された角速度センサ2の信号を統合して通信信号とし、通信信号用スリップリング78を介して通信信号ライン78Aに出力する。このように、コントロール基板74を回転プレート20上に配置して一緒に回転させることで、本テーブル装置1の制御信号や角速度センサ2の検出信号の全てを1つの通信信号ライン78Aを利用して外部と通信させる。また、支持棒72を利用することで、コントロール基板74(コントロールボックス70)を、回転プレート20から離れた場所に配置することで、回転プレート20上に広いスペースを確保することができ、温度調整ユニット30や測定ヘッド50を効率的に配置できるようになっている。なお、通信信号ライン78Aは、RS−232C規格やRS−485規格となっている。従って、外部の制御コンピュータとの間において標準的な規格で通信することが可能となる。
【0040】
本実施形態では、温度調整ユニット30(特に熱伝達プレート35)に温度センサが配置されており、コントロール基板74Aは、この温度センサを利用して角速度センサ2の温度状況を常に測定できるように構成される。また、回転プレート20には、正確に校正された基準角速度センサが配置されている。コントロール基板74Aは、この基準角速度センサを利用して、回転プレート20の実際の回転を高精度で検出する。これらの計測信号も、通信信号ライン78Aから外部にフィードバックされて制御コンピュータに取り込まれる。この制御コンピュータは、これらの信号に基づいて、コントロール基板74に対して制御信号を送信してフィードバック制御をかけるようになっている。基準角速度センサと角速度センサ2の出力差から、角速度センサ2の出力特性を把握する。
【0041】
なお、回転プレート20を回転させるモータ10は、いわゆるダイレクトドライブモータである。通常のモータは、大きなトルクが得られにくいため、減速機を使ってトルクを増大させるが、この減速機のガタで速度リップルが生じやすい。パルスモータは回転時に脈動(コギング)が大きくなり、同様に速度リップルが生じやすい。そこで、ダイレクトドライブモータを採用すれば、速度リップルの少ない回転運動を出力することが可能となる。
【0042】
次に、このテーブル装置1の動作について説明する。
【0043】
まず、キャリア40に対して10個の角速度センサ2を予めセットしておく。このキャリア40を、特に図示しない搬送コンベアによって温度調整ユニット30における熱伝達プレート35の溝部35Aに沿って挿入する。なお、温度調整ユニット30は、キャリア40が搬入される前に予め第1の目標温度に設定しておくことが好ましい。従って、キャリア40も、搬入と同時に昇温又は冷却されて第1の目標温度に制御される。
【0044】
この状態で、昇降ユニット60を動作させてコンタクトユニット54を下降させ、プローブピン54Aを角速度センサ2の端子に接触させると同時に、キャリア40を固定する。キャリア40の固定は、コンタクトユニット54に形成される位置決めピン54Bをキャリア40の位置決め孔に係合させることで行う。
【0045】
その後、モータ10によって回転プレート20を第1の目標角速度で回転させる。一定の時間経過によって、角速度が安定したことをコントロール基板74が確認してから、コントロール基板74が角速度センサ2の信号を検出する。検出完了後、更に回転プレート20を第2の目標角速度で回転させて、角速度センサ2の信号を検出する。第3、第4とこの動作を繰り返すことで、角速度や回転方向を変えながら、複数の目標角速度において信号検出を連続的に行っていく。検出された信号は、コントロール基板74において一つの通信信号に統合され、外部の制御コンピュータに出力される。
【0046】
その後、モータ10の回転を停止させてから、角速度センサ2を第2の目標温度に制御する。第2の目標温度の制御が完了したら、再び、モータ10によって回転プレート20を第1、第2、第3・・・の目標角速度で回転させながら角速度センサ2の信号を検出する。この動作を繰り返すことで、複数の温度帯域において、複数の角速度の検出を行う。全ての検出が完了したら、コンタクトユニット54を上昇させ、キャリア40を搬出する。
【0047】
本実施形態のテーブル装置1によれば、回転プレート20や温度調整ユニット30を角速度センサ2と共に連続回転させながら、角速度センサ2の信号特性を検査している。従って、恒温槽ではなく、角速度センサ2に対して間接又は直接的に温度制御を行い、信号を検出することが出来るので、テーブル装置1を大幅にコンパクト化することができる。また、温度が安定するまでの時間が、例えば1分〜2分程度にできるので、従来よりも素早い検査が可能となる。この結果、キャリア40に配置する角速度センサ2の数を抑制できるので(ここでは10個に抑制している)、コンタクトユニット54等もコンパクト化され、メンテナンス性を向上させることも可能となる。
【0048】
また、恒温槽の場合は、回転プレート20を連続回転させることによって対流が生じるので、それによっても温度誤差が生じやすいが、このテーブル装置1によれば、回転中においてもフィードバック制御によって角速度センサ2の実温度を高精度で制御できるので、従来よりも高精度に検査できる。具体的には目標温度に対して0.5度以内に収めることが可能となる。
【0049】
更にこのテーブル装置1では、回転プレート20を、ダイレクトドライブのモータ10によって直接的に保持するので、回転プレート20自体の安定性が増し、且つ、この回転プレート20の慣性によって安定した角速度を出力することが可能になる。回転プレート20に対して、同軸状態で対向するようにコントロールボックス70が配置されているので、このコントロールボックス70が角速度に悪影響を与えることを回避できる。更に、モータ10とは反対側から、温度調整ユニット30や測定ヘッド50の電源が供給されるので、液体循環路90を含めたモータ10側のいわゆる水系統と、電気系統を分離することが可能となり、安全性とメンテナンス性を相乗的に高めることができる。
【0050】
更にこのテーブル装置1では、昇降ユニット60が、コンタクトユニット54をモータ10の出力軸と平行方向に昇降させるようになっている。従って、回転の遠心方向と、コンタクトユニット54の昇降方向(角速度センサ2との接触方向)が直角になるので、コンタクトユニット54と角速度センサ2との接触状態が、遠心力の影響を受けないで済む。従って、高速回転中でもコンタクトユニット54の接触状態が安定し、高精度な測定が可能となっている。
【0051】
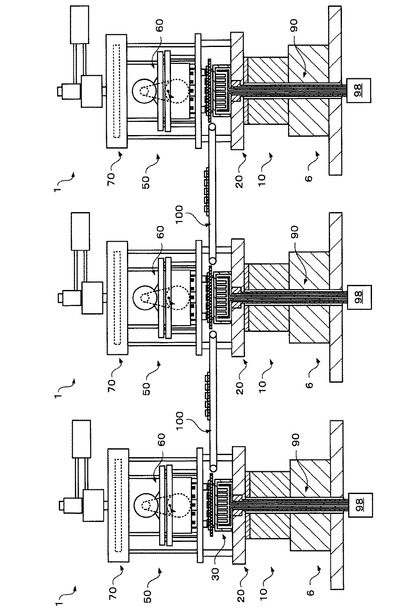
なお、図4に示されるように、このテーブル装置1を、角速度センサ2の製造ラインの中にインラインで配置しておき、コンベア100を利用してキャリア40をテーブル装置1に連続的に搬入・検査・搬出すれば、極めて高速に検査することが可能となる。特に、複数台のテーブル装置1を連続的に配置しておき、各テーブル装置1を異なる温度帯域にセットしておくことで、様々な温度帯の信号検査を高速且つ連続的に行うことができ、検査効率を飛躍的に高めることが可能となる。
【0052】
また更に、このテーブル装置1では、慣性の大きい回転プレート20を採用し、更にモータ10としてコギングの少ないダイレクトドライブタイプを用いている。従って、角速度運動の速度リップルが極めて少ないので、信号ノイズを低減させることもできる。また、通信信号を出力するためのスリップリングが、回転プレート20に対して対向配置されているので、回転プレート20側の配線が不要となり、メンテナンス性を一層高めるようになっている。即ち、回転プレート20側は水の配管関係、対向側は電源や通信信号関係に分割できるので、漏電の心配等も低減できる。
【0053】
更にまた、このテーブル装置1では、回転部分にコントロール基板74を配置していることから、電源関係や信号検出、温度制御、回転制御等の基本制御を全て回転部分側で完結することができる。従って、外部との入出力信号量を削減した状態で、回転部分側から外部と入出力ができるので、一つの通信信号ライン74Aで全ての情報を纏めて送受信でき、検査トラブルを抑制できる。なお、ここでは特に図示しないが、コントロール基板74側にADコンバータを設置しておき、角速度センサ2の出力をデジタル化してから、外部に出力することも好ましい。このようにすることで、アナログ信号を外部に出力する場合と比較してノイズの影響を受けにくくなるので、更に検査精度を高めることが可能となる。さらには、角速度センサ2の特性評価プログラム及びこれを実行するプロセッサも、コントロール基板74に搭載しておき、評価結果を外部に出力するようにしても良い。
【0054】
また本実施形態では、回転軸が鉛直となる場合を示したが、本発明はこれに限定されない。例えば図5に示されるように、回転軸が水平となるように配置しても良い。このようにすると、センサ2を重力(鉛直)方向に沿って偏心回転させることができるので、重力の影響を検出することも可能である。具体的に本実施形態の偏心回転によれば、センサ2のX−Y方向(キャリア40の面方向)の+G、−Gを検出することも可能になる。本実施形態は角速度センサと加速度センサの複合品においても有効である。また、回転軸を水平にする場合は、図6に示されるように、角速度センサの主軸はこの回転軸に対して垂直となるように配置して、角速度センサ2から出力される信号を検出しても良い。また特に図示しないが、回転軸を斜めに配置して、複合的な回転運動の出力を検出しても良い。
【0055】
更に本実施形態では、通信信号用スリップリング78を介して、制御信号やセンサ出力を外部と通信するようにしているが、本発明はこれに限定されない。例えば図7に示されるように、回転部側に無線通信装置120を配置しておき、外部との間で制御信号やセンサ出力を無線通信しても良い。なお、この例では、熱伝達プレート35に対して角速度センサ2を直接搭載している場合を示している。
【0056】
また本実施形態では、回転プレート20を基準としてモータ10の反対側に、通信信号用スリップリング78を配置し、外部と通信する場合を示したが、本発明はこれに限定されず、モータ10の下側に通信信号用のスリップリングを配置しても良い。この場合は、通信信号や電気の供給は、液体循環路90の外周に配線を施すことが好ましい。
【0057】
更に本実施形態では、回転プレート20に基準角速度センサを常に配置しておく場合を示したが、本発明はこれに限定されない。例えば、正確に校正された基準角速度センサを、所定のタイミングでキャリア40によって搬入して回転プレート20を回転させ、目標角速度に対する誤差を定期的に校正するようにしても良い。
【0058】
また更に本実施形態では、図8に示されるように、回転プレート20と一緒に回転する状態で配置される防風カバー150を備えることが好ましい。角速度センサ2の測定では、目的の角速度を得る為に相当量の連続回転が必要となるが、本実施形態のように、測定ヘッドやコントロール基板を一緒に回転させると、これらがファンのように作用して周囲に旋回風が生じる可能性がある。そこで図8のように、防風カバー150によって、角速度センサ2の周縁を覆うようにすれば、内外の空気が隔離され、防風カバー150の外側で生じる旋回風の影響を角速度センサ2がうけないで済む。また、防風カバー150内は、閉鎖された空気が滞留するので、温度制御をより安定させることも可能である。なお、ここで示しているように、防風カバー150は昇降ユニットと一緒に上下動させる構造が好ましい。なお、防風の観点では、望ましくは本実施形態のように角速度センサ2の上方も覆うことが望ましく、ここではスライダ62を防風カバーとして兼用している。しかし、防風カバー150の上方は開放されていても良い。本実施形態では防風カバー150を昇降ユニットと一緒に上下する構造を示したが、旋回風を防ぐ目的であれば、これにとらわれない。例えば、回転プレート20の上部にあるもの全てを、防風カバーでまとめて覆うようにしても内外の空気の隔離は可能である。
【0059】
また本実施形態では、図9に示されるように、角速度センサ2の面方向の位置決めを行い、中心位置を規定するセンタリング機構160を備えることも好ましい。このセンタリング機構160は、各角速度センサ2に対応して設けられて、各角速度センサ2を両側面から挟み込む複数の突起162と、この突起162を結合するアーム164と、これらの突起162及びアーム164を面方向にスライドさせる駆動機構166を備える。キャリア40側には、角速度センサ2を収容する凹部42に加えて、この凹部42内に突起162を案内する案内溝43が形成される。この案内溝43に沿って、突起162を角速度センサ2に向かってスライドさせることで、突起162の先端を角速度センサ2の側面に当接させて、角速度センサ2の位置決めを行う。この結果、コンタクトユニット54のプローブピン54Aと、角速度センサ2の中心位置が常に一定となるので、両者の接触ミスを抑制することが可能となる。
【0060】
なお、これらの実施形態で示した測定ヘッドやセンタリング機構などは、全て、電気をエネルギー源として駆動することが好ましい。このようにすると、電源の供給ラインを一つにまとめることが可能となるので、全ての電源を、電源供給用スリップリング76からの供給で賄うことができる。従って、装置の構造を簡略化でき且つメンテナンス性を良好にすることができる。
【産業上の利用可能性】
【0061】
本発明の角速度センサ検査用テーブル装置は、角速度を利用する各種電子部品の検査に利用することができる。
【符号の説明】
【0062】
1 角速度センサ検査用テーブル装置
2 角速度センサ
10 モータ
20 回転プレート
30 温度調整ユニット
40 キャリア
50 測定ヘッド
60 昇降ユニット
74 コントロール基板
【技術分野】
【0001】
本発明は、角速度センサを特定の温度に維持しながら回転させて、信号特性を検査する角速度検査装置に関する。
【背景技術】
【0002】
角速度を検出可能なセンサ(以下、角速度センサ)は、様々な場面で利用されるようになっている。この角速度センサには、角速度のみを検出するいわゆるジャイロセンサの他に、角速度と加速度を複合的に検出できる複合型センサ等が存在している。
【0003】
角速度センサの信号は、周囲の温度によって変動する場合があり、車載品や高精度品については、出荷前にその温度特性を全品検査する必要がある。従来、角速度センサの温度特性を検査する場合、恒温槽内に回転プレートを設置して、この回転プレート上に角速度センサを配置し、この恒温槽内を特定の温度に維持しながら、角速度センサを回転させて信号特性を検査している。
【0004】
具体的には、回転プレート上に試験基板が設置され、この試験基板の複数のソケットに角速度センサがセットされる。試験基板には、角速度センサの設置個数(ソケット個数)に対応した出力配線が設けられる。この出力配線は恒温槽の外部に取り出されて、計測器に接続される。この計測器によって信号特性が検査される。
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、この従来の検査装置では、恒温槽内の温度が安定するまでに、30分から60分の時間を要するため、角速度センサの検査サイクルタイム(例えば、1個あたり5秒〜15秒)を実現するためには、試験基板を大型化し、膨大な数の角速度センサを予めセットして同時に検査する必要があった。この結果、試験基板の設計・製作に多大な費用がかかり、また、膨大な数のソケットにおける角速度センサとのコンタクト性能を常に最適に維持・管理しなければならないという問題があった。また、検査装置全体も大型化し、恒温槽への試験基板の出し入れ作業に時間を要するという問題があった。
【0006】
また、従来の検査装置では、温度依存特性を検査するには、多段階の温度で検査する必要があるので、試験を開始したら数時間は恒温槽から部品を取り出すことが出来ない。従って、試験基板や角速度センサに不具合が生じても、その対応が遅れがちになってしまうという問題があった。
【0007】
更に、試験基板が大型化することから、恒温槽内に無駄な空間が生じてしまう。従って、角速度センサが本来必要とする熱量に対して、恒温槽内の空気(空間)や試験基板の温度が安定するために必要な熱量が非常に大きくなり、電気消費量や冷却水の消費量に無駄が多いという問題があった。
【0008】
恒温槽内の温度を均一化するためには、内部の空気を循環させる必要がある。しかし実際には、内部の空気を循環させても、広範囲に亘って温度を均一にすることは困難となる。今後、温度特性を高精度に検査するためには、各角速度センサの温度を0.5度〜1.0度の誤差内に制御する必要があるが、そのためには恒温槽の熱源や内部の循環ファンの容量を増大させなければならないことから、より一層、電力消費量が増大することが懸念された。
【0009】
更にまた、恒温槽内の回転プレートを駆動するモータは、温度上の制約から、恒温槽の外部に配置する必要があるため、恒温槽の内外を駆動軸が貫通する必要があり、恒温槽が複雑化するという問題があった。
【0010】
本発明は上記問題点に鑑みてなされたものであり、角速度センサ信号の温度依存特性を検査するために好適な角速度センサ検査用テーブル装置を提供することを目的としている。
【課題を解決するための手段】
【0011】
上記目的を達成する本発明は、特定の温度に維持される角速度センサを回転させて信号特性を検査する角速度センサ検査用テーブル装置であって、角速度を得る為のモータと、前記モータの出力軸に連結される回転プレートと、前記回転プレートと一緒に回転する状態で配置される前記角速度センサと、前記回転プレート上に配置されて前記角速度センサと直接又は間接的に接触し、前記角速度センサの温度を調整する温度調整ユニットと、を備え、前記回転プレート及び前記温度調整ユニットを前記角速度センサと共に一方向に連続回転させながら、前記角速度センサの信号特性を検査することを特徴とする角速度センサ検査用テーブル装置である。
【0012】
上記角速度センサ検査用テーブル装置では、更に、前記回転プレートの重心が、前記モータの出力軸の回転中心と略一致することを特徴とすることが好ましい。
【0013】
上記角速度センサ検査用テーブル装置では、更に、前記角速度センサはキャリアにセットされており、前記温度調整ユニットが該キャリアを介して間接的に前記角速度センサを温度制御することを特徴とすることが好ましい。
【0014】
上記角速度センサ検査用テーブル装置では、更に、前記回転プレートと一緒に回転する状態で配置されて、前記角速度センサの端子と接触し、前記角速度センサの前記信号特性を検出する測定ヘッドを備えることを特徴とすることが好ましい。
【0015】
上記角速度センサ検査用テーブル装置では、更に、前記測定ヘッドが、前記角速度センサの端子と接触するコンタクトユニットと、前記コンタクトユニットを前記端子に対して近接及び離反させる昇降ユニットを備えることを特徴とすることが好ましい。
【0016】
上記角速度センサ検査用テーブル装置では、更に、前記昇降ユニットが、前記コンタクトユニットを、前記モータの出力軸と平行方向に昇降させることを特徴とすることが好ましい。
【0017】
上記角速度センサ検査用テーブル装置では、更に、前記回転プレートと一緒に回転する状態で配置されて、前記測定ヘッドを介して前記角速度センサの信号を取得するコントロール基板を備えることを特徴とすることが好ましい。
【0018】
上記角速度センサ検査用テーブル装置では、更に、 前記コントロール基板が、支持部材によって、前記回転プレートから離反した場所に配置されることを特徴とすることが好ましい。
【0019】
上記角速度センサ検査用テーブル装置では、更に、前記キャリアには複数の前記角速度センサが配置されており、前記コントロール基板は、複数の前記角速度センサの各信号を取得して1つの通信信号に統合し、前記通信信号を外部へ出力することを特徴とすることが好ましい。
【0020】
上記角速度センサ検査用テーブル装置では、更に、前記モータは中空構造であり、前記モータの内部を貫通して前記温度制御ユニットに対して冷熱又は温熱の熱源が供給されることを特徴とすることが好ましい。
【0021】
上記角速度センサ検査用テーブル装置では、更に、前記モータはダイレクトドライブモータであることを特徴とすることが好ましい。
【0022】
上記角速度センサ検査用テーブル装置では、更に、前記角速度センサの温度状況を測定可能な温度センサを備えることを特徴とすることが好ましい。
【0023】
上記角速度センサ検査用テーブル装置では、更に、前回転プレートには、校正済みの基準角速度センサが配置されており、該基準角速度センサが該回転プレートの角速度を検出することを特徴とすることが好ましい。
【0024】
上記角速度センサ検査用テーブル装置では、更に、前記回転プレートと一緒に回転する状態で配置され、前記角速度センサの側面に当接することで、前記コンタクトユニットに対する該角速度センサの位置を規制するセンタリングユニットを備えることを特徴とすることが好ましい。
【0025】
上記角速度センサ検査用テーブル装置では、更に、前記測定ヘッドにおける前記昇降ユニットは、電気的駆動源を動力にして前記コンタクトユニットを昇降させることを特徴とすることが好ましい。
【0026】
上記角速度センサ検査用テーブル装置では、更に、前記回転プレートと一緒に回転する状態で配置され、前記角速度センサの周囲を取り囲む防風カバーを備えることを特徴とすることが好ましい。
【発明の効果】
【0027】
本発明の角速度センサ検査用テーブル装置によれば、回転テーブル上に配置されて共に回転する温度調整ユニットによって角速度センサを直接又は間接的に温度制御するので、恒温槽が不要となり、高精度且つ高速で検査できるという優れた効果を奏し得る。
【図面の簡単な説明】
【0028】
【図1】本発明の実施形態に係る角速度検査用テーブル装置の全体構造を示す正面図である。
【図2】同角速度検査用テーブル装置の全体構造を示す側面図である。
【図3】図1のIII−III矢視断面図である。
【図4】複数の角速度検査用テーブル装置が連なって配置される角速度連続検査装置の構成例を示す図である。
【図5】角速度検査用テーブル装置の他の構成例を示す図である。
【図6】角速度検査用テーブル装置の他の構成例を示す図である。
【図7】角速度検査用テーブル装置の他の構成例を示す図である。
【図8】角速度検査用テーブル装置の他の構成例を示す図である。
【図9】角速度検査用テーブル装置の他の構成例を示す図である。
【発明を実施するための形態】
【0029】
以下、本発明の実施の形態を添付図面を参照して説明する。
【0030】
図1には、本発明の実施の形態に係る角速度センサ検査用テーブル装置(以下テーブル装置)1の全体構成が示されている。図2にはテーブル装置1の側面図が示されている。図3には、テーブル装置1の回転テーブルを上方から視た場合の断面図が示されている。
【0031】
このテーブル装置1は、角速度センサ2を特定温度に維持しながら回転させて、角速度センサ2の信号特性を検査するものである。テーブル装置1は、角速度を得る為のモータ10と、このモータ10の出力軸14に連結され、自身の重心が出力軸14の回転中心と略一致する回転プレート20を備える。回転プレート20は円盤形状であり、自身の慣性によってモータ10の角速度を安定させる役割を担う。即ち、回転プレート20の直径と重量を大きくすることで、回転中の慣性力を働かせ、モータ10の速度リップルを緩和する。また、このようにすることで、回転プレート20の重心が出力軸14の回転中心と多少ずれていても、定速回転中において慣性モーメントが作用し、速度変動を抑制できる。
【0032】
回転プレート20には、温度調整ユニット30、キャリア40、角速度センサ2、測定ヘッド50、コントロール基板74が配置されている。
【0033】
温度調整ユニット30は、回転プレート20上に固定配置されて回転プレート20と一緒に回転する。この温度調整ユニット30は、筐体32と、この筐体32の上面32A(天井側)に配置されるペルチェ素子34と、筐体32の内部に配置されるヒートシンク36と、ペルチェ素子34の上面に配置される熱伝達プレート35を備えている。筐体内32を水が循環すると、このヒートシンク36を介して、ペルチェ素子34と熱交換が行われる。
【0034】
熱伝達プレート35の上に配置されるキャリア40は帯状プレートであって、上面に形成される複数の凹部42に角速度センサ2が収容される。このキャリア40は、熱伝達プレート35の上面に形成される溝部35A(図2参照)に平面方向から搬入されて載置される。結果、温度調整ユニット30の熱は、キャリア40を介して角速度センサ2に間接的に伝達され、角速度センサ2が温度制御される。後述する測定ヘッド50が下降すると、測定ヘッド50の位置決めピンと54B係合して、キャリア40が位置決めされる。なお、ここではキャリア40を介して角速度センサ2の温度を制御する構造を示したが、温度調整ユニット30(熱伝達プレート35)の上面に角速度センサ2を直接セットして、直接的に温度制御することも可能である。
【0035】
回転プレート20は、中心に貫通孔22が形成されている。また、この回転テーブル20が結合されるモータ10は、本体12及び出力軸14が中空構造となるいわゆる中空モータであり、中心に挿入孔16が形成されている。更に、モータ10を保持する基台6にも貫通孔6Aが形成されている。これらの貫通口22、挿入孔16、貫通孔6Aを纏めて貫通するようにして、液体循環路90が配置される。この液体循環路90の上端は温度調整ユニット30の筐体32に連結される。液体循環路90の下端はロータリージョイント98に連結されて、水が供給される。液体循環路90の内部は二重パイプ構造となっており、中心側は水を供給する為の往路92となり、周囲側は供給した水を回収する復路94となる。従って、ロータリージョイント98から供給される水(又は温水)が、往路92を経由して温度調整ユニット30の筐体32内に供給され、その水は復路94を経由してロータリージョイント98から排出される。
【0036】
測定ヘッド50は、回転テーブル20に立設される4本の脚部51と、この脚部51によって水平方向に支持される台座52と、台座52上に設置される昇降ユニット60と、昇降ユニット60によって昇降されることで角速度センサ2に対して近接・離反するコンタクトユニット54を備える。コンタクトユニット54は、複数のプローブピン54Aが配置されており、キャリア40に配置される複数(例えば10個)の角速度センサ2(図1では便宜上5個に省略)の信号出力端子に同時に当接できるようになっている。
【0037】
昇降ユニット60は、コンタクトユニット54を保持するスライダ62と、このスライダ62を上下方向(軸線方向)に案内する2本のガイド軸64と、スライダ62と係合して、自身の回転によってこのスライダ62を上下方向に移動させるクランク66と、このクランク66をベルト67を介して回転駆動する昇降モータ68を備える。従って、昇降モータ68を所定のタイミングで回転させれば、コンタクトユニット54が上下動する。昇降モータ68は、ガイド軸64の上端を利用して保持するようになっている。なお、ここでは昇降モータ68を利用して上下動させる場合を示したが、本発明はこれに限定されず、電気的なソレノイドを用いて上下動させたり、空気圧や油圧を利用したシリンダによって上下動させたりすることも可能である。
【0038】
更に本実施形態では、キャリア40の上方であって、回転プレート20に対向するような状態で、円形のコントロールボックス70が同軸状態で配置される。このコントロールボックス70は、台座52に立設される4本の支持棒72によって保持されており、内部にコントロール基板74が配置される。このコントロールボックス70の上面には、電源供給用スリップリング76と、通信信号用スリップリング78が配置される。この2つのスリップリング76、78は、外部に設置される電源ライン76Aと通信信号ライン78Aにそれぞれ接触している。
【0039】
コントロール基板74は、電源ライン76Aから電源供給用スリップリング76を介して電源供給を受けて、更にこの電源を、昇降モータ68や温度調整ユニット30のペルチェ素子34の駆動電源に割り当てる。また、コントロール基板74は、通信信号ライン78Aから通信信号用スリップリング78を介して入力される制御信号に基づいて、昇降モータ68を昇降させたり、ペルチェ素子34の温度を制御したり、コンタクトユニット54による10個の角速度センサ2の信号検出を行う。また、コントロール基板74は、検出された角速度センサ2の信号を統合して通信信号とし、通信信号用スリップリング78を介して通信信号ライン78Aに出力する。このように、コントロール基板74を回転プレート20上に配置して一緒に回転させることで、本テーブル装置1の制御信号や角速度センサ2の検出信号の全てを1つの通信信号ライン78Aを利用して外部と通信させる。また、支持棒72を利用することで、コントロール基板74(コントロールボックス70)を、回転プレート20から離れた場所に配置することで、回転プレート20上に広いスペースを確保することができ、温度調整ユニット30や測定ヘッド50を効率的に配置できるようになっている。なお、通信信号ライン78Aは、RS−232C規格やRS−485規格となっている。従って、外部の制御コンピュータとの間において標準的な規格で通信することが可能となる。
【0040】
本実施形態では、温度調整ユニット30(特に熱伝達プレート35)に温度センサが配置されており、コントロール基板74Aは、この温度センサを利用して角速度センサ2の温度状況を常に測定できるように構成される。また、回転プレート20には、正確に校正された基準角速度センサが配置されている。コントロール基板74Aは、この基準角速度センサを利用して、回転プレート20の実際の回転を高精度で検出する。これらの計測信号も、通信信号ライン78Aから外部にフィードバックされて制御コンピュータに取り込まれる。この制御コンピュータは、これらの信号に基づいて、コントロール基板74に対して制御信号を送信してフィードバック制御をかけるようになっている。基準角速度センサと角速度センサ2の出力差から、角速度センサ2の出力特性を把握する。
【0041】
なお、回転プレート20を回転させるモータ10は、いわゆるダイレクトドライブモータである。通常のモータは、大きなトルクが得られにくいため、減速機を使ってトルクを増大させるが、この減速機のガタで速度リップルが生じやすい。パルスモータは回転時に脈動(コギング)が大きくなり、同様に速度リップルが生じやすい。そこで、ダイレクトドライブモータを採用すれば、速度リップルの少ない回転運動を出力することが可能となる。
【0042】
次に、このテーブル装置1の動作について説明する。
【0043】
まず、キャリア40に対して10個の角速度センサ2を予めセットしておく。このキャリア40を、特に図示しない搬送コンベアによって温度調整ユニット30における熱伝達プレート35の溝部35Aに沿って挿入する。なお、温度調整ユニット30は、キャリア40が搬入される前に予め第1の目標温度に設定しておくことが好ましい。従って、キャリア40も、搬入と同時に昇温又は冷却されて第1の目標温度に制御される。
【0044】
この状態で、昇降ユニット60を動作させてコンタクトユニット54を下降させ、プローブピン54Aを角速度センサ2の端子に接触させると同時に、キャリア40を固定する。キャリア40の固定は、コンタクトユニット54に形成される位置決めピン54Bをキャリア40の位置決め孔に係合させることで行う。
【0045】
その後、モータ10によって回転プレート20を第1の目標角速度で回転させる。一定の時間経過によって、角速度が安定したことをコントロール基板74が確認してから、コントロール基板74が角速度センサ2の信号を検出する。検出完了後、更に回転プレート20を第2の目標角速度で回転させて、角速度センサ2の信号を検出する。第3、第4とこの動作を繰り返すことで、角速度や回転方向を変えながら、複数の目標角速度において信号検出を連続的に行っていく。検出された信号は、コントロール基板74において一つの通信信号に統合され、外部の制御コンピュータに出力される。
【0046】
その後、モータ10の回転を停止させてから、角速度センサ2を第2の目標温度に制御する。第2の目標温度の制御が完了したら、再び、モータ10によって回転プレート20を第1、第2、第3・・・の目標角速度で回転させながら角速度センサ2の信号を検出する。この動作を繰り返すことで、複数の温度帯域において、複数の角速度の検出を行う。全ての検出が完了したら、コンタクトユニット54を上昇させ、キャリア40を搬出する。
【0047】
本実施形態のテーブル装置1によれば、回転プレート20や温度調整ユニット30を角速度センサ2と共に連続回転させながら、角速度センサ2の信号特性を検査している。従って、恒温槽ではなく、角速度センサ2に対して間接又は直接的に温度制御を行い、信号を検出することが出来るので、テーブル装置1を大幅にコンパクト化することができる。また、温度が安定するまでの時間が、例えば1分〜2分程度にできるので、従来よりも素早い検査が可能となる。この結果、キャリア40に配置する角速度センサ2の数を抑制できるので(ここでは10個に抑制している)、コンタクトユニット54等もコンパクト化され、メンテナンス性を向上させることも可能となる。
【0048】
また、恒温槽の場合は、回転プレート20を連続回転させることによって対流が生じるので、それによっても温度誤差が生じやすいが、このテーブル装置1によれば、回転中においてもフィードバック制御によって角速度センサ2の実温度を高精度で制御できるので、従来よりも高精度に検査できる。具体的には目標温度に対して0.5度以内に収めることが可能となる。
【0049】
更にこのテーブル装置1では、回転プレート20を、ダイレクトドライブのモータ10によって直接的に保持するので、回転プレート20自体の安定性が増し、且つ、この回転プレート20の慣性によって安定した角速度を出力することが可能になる。回転プレート20に対して、同軸状態で対向するようにコントロールボックス70が配置されているので、このコントロールボックス70が角速度に悪影響を与えることを回避できる。更に、モータ10とは反対側から、温度調整ユニット30や測定ヘッド50の電源が供給されるので、液体循環路90を含めたモータ10側のいわゆる水系統と、電気系統を分離することが可能となり、安全性とメンテナンス性を相乗的に高めることができる。
【0050】
更にこのテーブル装置1では、昇降ユニット60が、コンタクトユニット54をモータ10の出力軸と平行方向に昇降させるようになっている。従って、回転の遠心方向と、コンタクトユニット54の昇降方向(角速度センサ2との接触方向)が直角になるので、コンタクトユニット54と角速度センサ2との接触状態が、遠心力の影響を受けないで済む。従って、高速回転中でもコンタクトユニット54の接触状態が安定し、高精度な測定が可能となっている。
【0051】
なお、図4に示されるように、このテーブル装置1を、角速度センサ2の製造ラインの中にインラインで配置しておき、コンベア100を利用してキャリア40をテーブル装置1に連続的に搬入・検査・搬出すれば、極めて高速に検査することが可能となる。特に、複数台のテーブル装置1を連続的に配置しておき、各テーブル装置1を異なる温度帯域にセットしておくことで、様々な温度帯の信号検査を高速且つ連続的に行うことができ、検査効率を飛躍的に高めることが可能となる。
【0052】
また更に、このテーブル装置1では、慣性の大きい回転プレート20を採用し、更にモータ10としてコギングの少ないダイレクトドライブタイプを用いている。従って、角速度運動の速度リップルが極めて少ないので、信号ノイズを低減させることもできる。また、通信信号を出力するためのスリップリングが、回転プレート20に対して対向配置されているので、回転プレート20側の配線が不要となり、メンテナンス性を一層高めるようになっている。即ち、回転プレート20側は水の配管関係、対向側は電源や通信信号関係に分割できるので、漏電の心配等も低減できる。
【0053】
更にまた、このテーブル装置1では、回転部分にコントロール基板74を配置していることから、電源関係や信号検出、温度制御、回転制御等の基本制御を全て回転部分側で完結することができる。従って、外部との入出力信号量を削減した状態で、回転部分側から外部と入出力ができるので、一つの通信信号ライン74Aで全ての情報を纏めて送受信でき、検査トラブルを抑制できる。なお、ここでは特に図示しないが、コントロール基板74側にADコンバータを設置しておき、角速度センサ2の出力をデジタル化してから、外部に出力することも好ましい。このようにすることで、アナログ信号を外部に出力する場合と比較してノイズの影響を受けにくくなるので、更に検査精度を高めることが可能となる。さらには、角速度センサ2の特性評価プログラム及びこれを実行するプロセッサも、コントロール基板74に搭載しておき、評価結果を外部に出力するようにしても良い。
【0054】
また本実施形態では、回転軸が鉛直となる場合を示したが、本発明はこれに限定されない。例えば図5に示されるように、回転軸が水平となるように配置しても良い。このようにすると、センサ2を重力(鉛直)方向に沿って偏心回転させることができるので、重力の影響を検出することも可能である。具体的に本実施形態の偏心回転によれば、センサ2のX−Y方向(キャリア40の面方向)の+G、−Gを検出することも可能になる。本実施形態は角速度センサと加速度センサの複合品においても有効である。また、回転軸を水平にする場合は、図6に示されるように、角速度センサの主軸はこの回転軸に対して垂直となるように配置して、角速度センサ2から出力される信号を検出しても良い。また特に図示しないが、回転軸を斜めに配置して、複合的な回転運動の出力を検出しても良い。
【0055】
更に本実施形態では、通信信号用スリップリング78を介して、制御信号やセンサ出力を外部と通信するようにしているが、本発明はこれに限定されない。例えば図7に示されるように、回転部側に無線通信装置120を配置しておき、外部との間で制御信号やセンサ出力を無線通信しても良い。なお、この例では、熱伝達プレート35に対して角速度センサ2を直接搭載している場合を示している。
【0056】
また本実施形態では、回転プレート20を基準としてモータ10の反対側に、通信信号用スリップリング78を配置し、外部と通信する場合を示したが、本発明はこれに限定されず、モータ10の下側に通信信号用のスリップリングを配置しても良い。この場合は、通信信号や電気の供給は、液体循環路90の外周に配線を施すことが好ましい。
【0057】
更に本実施形態では、回転プレート20に基準角速度センサを常に配置しておく場合を示したが、本発明はこれに限定されない。例えば、正確に校正された基準角速度センサを、所定のタイミングでキャリア40によって搬入して回転プレート20を回転させ、目標角速度に対する誤差を定期的に校正するようにしても良い。
【0058】
また更に本実施形態では、図8に示されるように、回転プレート20と一緒に回転する状態で配置される防風カバー150を備えることが好ましい。角速度センサ2の測定では、目的の角速度を得る為に相当量の連続回転が必要となるが、本実施形態のように、測定ヘッドやコントロール基板を一緒に回転させると、これらがファンのように作用して周囲に旋回風が生じる可能性がある。そこで図8のように、防風カバー150によって、角速度センサ2の周縁を覆うようにすれば、内外の空気が隔離され、防風カバー150の外側で生じる旋回風の影響を角速度センサ2がうけないで済む。また、防風カバー150内は、閉鎖された空気が滞留するので、温度制御をより安定させることも可能である。なお、ここで示しているように、防風カバー150は昇降ユニットと一緒に上下動させる構造が好ましい。なお、防風の観点では、望ましくは本実施形態のように角速度センサ2の上方も覆うことが望ましく、ここではスライダ62を防風カバーとして兼用している。しかし、防風カバー150の上方は開放されていても良い。本実施形態では防風カバー150を昇降ユニットと一緒に上下する構造を示したが、旋回風を防ぐ目的であれば、これにとらわれない。例えば、回転プレート20の上部にあるもの全てを、防風カバーでまとめて覆うようにしても内外の空気の隔離は可能である。
【0059】
また本実施形態では、図9に示されるように、角速度センサ2の面方向の位置決めを行い、中心位置を規定するセンタリング機構160を備えることも好ましい。このセンタリング機構160は、各角速度センサ2に対応して設けられて、各角速度センサ2を両側面から挟み込む複数の突起162と、この突起162を結合するアーム164と、これらの突起162及びアーム164を面方向にスライドさせる駆動機構166を備える。キャリア40側には、角速度センサ2を収容する凹部42に加えて、この凹部42内に突起162を案内する案内溝43が形成される。この案内溝43に沿って、突起162を角速度センサ2に向かってスライドさせることで、突起162の先端を角速度センサ2の側面に当接させて、角速度センサ2の位置決めを行う。この結果、コンタクトユニット54のプローブピン54Aと、角速度センサ2の中心位置が常に一定となるので、両者の接触ミスを抑制することが可能となる。
【0060】
なお、これらの実施形態で示した測定ヘッドやセンタリング機構などは、全て、電気をエネルギー源として駆動することが好ましい。このようにすると、電源の供給ラインを一つにまとめることが可能となるので、全ての電源を、電源供給用スリップリング76からの供給で賄うことができる。従って、装置の構造を簡略化でき且つメンテナンス性を良好にすることができる。
【産業上の利用可能性】
【0061】
本発明の角速度センサ検査用テーブル装置は、角速度を利用する各種電子部品の検査に利用することができる。
【符号の説明】
【0062】
1 角速度センサ検査用テーブル装置
2 角速度センサ
10 モータ
20 回転プレート
30 温度調整ユニット
40 キャリア
50 測定ヘッド
60 昇降ユニット
74 コントロール基板
【特許請求の範囲】
【請求項1】
特定の温度に維持される角速度センサを回転させて信号特性を検査する角速度センサ検査用テーブル装置であって、
角速度を得る為のモータと、
前記モータの出力軸に連結される回転プレートと、
前記回転プレートと一緒に回転する状態で配置される前記角速度センサと、
前記回転プレート上に配置されて前記角速度センサと直接又は間接的に接触し、前記角速度センサの温度を調整する温度調整ユニットと、を備え、
前記回転プレート及び前記温度調整ユニットを前記角速度センサと共に一方向に連続回転させながら、前記角速度センサの信号特性を検査することを特徴とする角速度センサ検査用テーブル装置。
【請求項2】
前記回転プレートの重心は、前記モータの出力軸の回転中心と略一致することを特徴とする
請求項1に記載の角速度検査用テーブル装置。
【請求項3】
前記角速度センサはキャリアにセットされており、前記温度調整ユニットが該キャリアを介して間接的に前記角速度センサを温度制御することを特徴とする
請求項1又は2に記載の角速度センサ検査用テーブル装置。
【請求項4】
前記回転プレートと一緒に回転する状態で配置されて、前記角速度センサの端子と接触し、前記角速度センサの前記信号特性を検出する測定ヘッドを備えることを特徴とする
請求項1乃至3のいずれかに記載の角速度センサ検査用テーブル装置。
【請求項5】
前記測定ヘッドは、前記角速度センサの端子と接触するコンタクトユニットと、前記コンタクトユニットを前記端子に対して近接及び離反させる昇降ユニットを備えることを特徴とする
請求項4に記載の角速度センサ検査用テーブル装置。
【請求項6】
前記昇降ユニットは、前記コンタクトユニットを、前記モータの出力軸と平行方向に昇降させることを特徴とする
請求項5に記載の角速度センサ検査用テーブル装置。
【請求項7】
前記回転プレートと一緒に回転する状態で配置されて、前記測定ヘッドを介して前記角速度センサの信号を取得するコントロール基板を備えることを特徴とする
請求項1乃至6のいずれかに記載の角速度センサ検査用テーブル装置。
【請求項8】
前記コントロール基板は、支持部材によって、前記回転プレートから離反した場所に配置されることを特徴とする
請求項7に記載の角速度センサ検査用テーブル装置。
【請求項9】
前記キャリアには複数の前記角速度センサが配置されており、
前記コントロール基板は、複数の前記角速度センサの各信号を取得して1つの通信信号に統合し、前記通信信号を外部へ出力することを特徴とする
請求項7又は8に記載の角速度検査用テーブル装置。
【請求項10】
前記モータは中空構造であり、
前記モータの内部を貫通して前記温度制御ユニットに対して冷熱又は温熱の熱源が供給されることを特徴とする
請求項1乃至9のいずれかに記載の角速度センサ検査用テーブル装置。
【請求項11】
前記モータはダイレクトドライブモータであることを特徴とする
請求項1乃至10のいずれかに記載の角速度センサ検査用テーブル装置。
【請求項12】
前記角速度センサの温度状況を測定可能な温度センサを備えることを特徴とする
請求項1乃至11のいずれかに記載の角速度センサ検査用テーブル装置。
【請求項13】
前記回転プレートには、校正済みの基準角速度センサが配置されており、該基準角速度センサが該回転プレートの角速度を検出することを特徴とする
請求項1乃至12のいずれかに記載の角速度センサ検査用テーブル装置。
【請求項14】
前記回転プレートと一緒に回転する状態で配置され、前記角速度センサの側面に当接することで、前記コンタクトユニットに対する該角速度センサの位置を規制するセンタリングユニットを備えることを特徴とする
請求項1乃至13のいずれかに記載の角速度センサ検査用テーブル装置。
【請求項15】
前記測定ヘッドにおける前記昇降ユニットは、電気的駆動源を動力にして前記コンタクトユニットを昇降させることを特徴とする
請求項6に記載の角速度センサ検査用テーブル装置。
【請求項16】
前記回転プレートと一緒に回転する状態で配置され、前記角速度センサの周囲を取り囲む防風カバーを備えることを特徴とする
請求項1乃至15に記載の角速度センサ検査用テーブル装置。
【請求項1】
特定の温度に維持される角速度センサを回転させて信号特性を検査する角速度センサ検査用テーブル装置であって、
角速度を得る為のモータと、
前記モータの出力軸に連結される回転プレートと、
前記回転プレートと一緒に回転する状態で配置される前記角速度センサと、
前記回転プレート上に配置されて前記角速度センサと直接又は間接的に接触し、前記角速度センサの温度を調整する温度調整ユニットと、を備え、
前記回転プレート及び前記温度調整ユニットを前記角速度センサと共に一方向に連続回転させながら、前記角速度センサの信号特性を検査することを特徴とする角速度センサ検査用テーブル装置。
【請求項2】
前記回転プレートの重心は、前記モータの出力軸の回転中心と略一致することを特徴とする
請求項1に記載の角速度検査用テーブル装置。
【請求項3】
前記角速度センサはキャリアにセットされており、前記温度調整ユニットが該キャリアを介して間接的に前記角速度センサを温度制御することを特徴とする
請求項1又は2に記載の角速度センサ検査用テーブル装置。
【請求項4】
前記回転プレートと一緒に回転する状態で配置されて、前記角速度センサの端子と接触し、前記角速度センサの前記信号特性を検出する測定ヘッドを備えることを特徴とする
請求項1乃至3のいずれかに記載の角速度センサ検査用テーブル装置。
【請求項5】
前記測定ヘッドは、前記角速度センサの端子と接触するコンタクトユニットと、前記コンタクトユニットを前記端子に対して近接及び離反させる昇降ユニットを備えることを特徴とする
請求項4に記載の角速度センサ検査用テーブル装置。
【請求項6】
前記昇降ユニットは、前記コンタクトユニットを、前記モータの出力軸と平行方向に昇降させることを特徴とする
請求項5に記載の角速度センサ検査用テーブル装置。
【請求項7】
前記回転プレートと一緒に回転する状態で配置されて、前記測定ヘッドを介して前記角速度センサの信号を取得するコントロール基板を備えることを特徴とする
請求項1乃至6のいずれかに記載の角速度センサ検査用テーブル装置。
【請求項8】
前記コントロール基板は、支持部材によって、前記回転プレートから離反した場所に配置されることを特徴とする
請求項7に記載の角速度センサ検査用テーブル装置。
【請求項9】
前記キャリアには複数の前記角速度センサが配置されており、
前記コントロール基板は、複数の前記角速度センサの各信号を取得して1つの通信信号に統合し、前記通信信号を外部へ出力することを特徴とする
請求項7又は8に記載の角速度検査用テーブル装置。
【請求項10】
前記モータは中空構造であり、
前記モータの内部を貫通して前記温度制御ユニットに対して冷熱又は温熱の熱源が供給されることを特徴とする
請求項1乃至9のいずれかに記載の角速度センサ検査用テーブル装置。
【請求項11】
前記モータはダイレクトドライブモータであることを特徴とする
請求項1乃至10のいずれかに記載の角速度センサ検査用テーブル装置。
【請求項12】
前記角速度センサの温度状況を測定可能な温度センサを備えることを特徴とする
請求項1乃至11のいずれかに記載の角速度センサ検査用テーブル装置。
【請求項13】
前記回転プレートには、校正済みの基準角速度センサが配置されており、該基準角速度センサが該回転プレートの角速度を検出することを特徴とする
請求項1乃至12のいずれかに記載の角速度センサ検査用テーブル装置。
【請求項14】
前記回転プレートと一緒に回転する状態で配置され、前記角速度センサの側面に当接することで、前記コンタクトユニットに対する該角速度センサの位置を規制するセンタリングユニットを備えることを特徴とする
請求項1乃至13のいずれかに記載の角速度センサ検査用テーブル装置。
【請求項15】
前記測定ヘッドにおける前記昇降ユニットは、電気的駆動源を動力にして前記コンタクトユニットを昇降させることを特徴とする
請求項6に記載の角速度センサ検査用テーブル装置。
【請求項16】
前記回転プレートと一緒に回転する状態で配置され、前記角速度センサの周囲を取り囲む防風カバーを備えることを特徴とする
請求項1乃至15に記載の角速度センサ検査用テーブル装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2011−257203(P2011−257203A)
【公開日】平成23年12月22日(2011.12.22)
【国際特許分類】
【出願番号】特願2010−130611(P2010−130611)
【出願日】平成22年6月8日(2010.6.8)
【出願人】(501410137)アキム株式会社 (49)
【Fターム(参考)】
【公開日】平成23年12月22日(2011.12.22)
【国際特許分類】
【出願日】平成22年6月8日(2010.6.8)
【出願人】(501410137)アキム株式会社 (49)
【Fターム(参考)】
[ Back to top ]