
角速度センサ補正装置および角速度センサ補正方法
【課題】起動してから短期間であっても角速度の導出精度を向上したい。
【解決手段】GPS測位部20は、GPS衛星からの信号を受信して、対象物の方位が少なくとも含まれたGPS測位データ200を出力する。角速度センサ26は、対象物における角速度を出力する。オフセット値演算部28は、測位データと角速度とをもとに、対象物の走行状態を推定する。オフセット値演算部28は、推定した対象物の走行状態に応じて、角速度センサの仮のオフセット値を逐次導出する。オフセット値演算部28は、角速度センサの仮のオフセット値に対して統計処理を実行することによって、角速度センサのオフセット値を導出する。ここで、統計処理の際の忘却係数は、対象物の走行状態に応じて変更される。
【解決手段】GPS測位部20は、GPS衛星からの信号を受信して、対象物の方位が少なくとも含まれたGPS測位データ200を出力する。角速度センサ26は、対象物における角速度を出力する。オフセット値演算部28は、測位データと角速度とをもとに、対象物の走行状態を推定する。オフセット値演算部28は、推定した対象物の走行状態に応じて、角速度センサの仮のオフセット値を逐次導出する。オフセット値演算部28は、角速度センサの仮のオフセット値に対して統計処理を実行することによって、角速度センサのオフセット値を導出する。ここで、統計処理の際の忘却係数は、対象物の走行状態に応じて変更される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、角速度センサ補正技術に関し、特に角速度センサからの出力信号を補正するための値を導出する角速度センサ補正装置および角速度センサ補正方法に関する。
【背景技術】
【0002】
車両用ナビゲーション装置では、一般的に、自立航法から算出された位置と、GPS(Global Positioning System)から算出された位置とが合成されることによって、最適な位置が推定される。自立航法では、車両の速度を示す速度パルスと、角速度センサによって計測された車両の旋回角速度とをもとに、前回の測位位置を更新することによって、現在の位置が算出される。このような方式のナビゲーション装置によれば、GPS衛星からの電波の受信が困難なトンネル、地下駐車場や高層ビルの谷間であっても、自立航法によって自車位置の導出が可能である。車両の旋回による角速度ωは、次の式によって導出される。
ω=(Vout−Voffset)/S ・・・(1)
ここで、Voutは、角速度センサの出力電圧であり、Voffsetは、角速度センサのオフセット値、S(mV/deg/sec)は、角速度センサの感度係数である。
【0003】
角速度を正確に求めるためには、角速度センサのオフセット値と、感度係数を正確に求める必要がある。角速度センサの感度係数は、一般的に角速度センサの個体差や角速度センサの車両への取り付け角度により異なる。また、オフセット値は温度変化によって変化する可能性がある。つまり、オフセット値は、車両用ナビゲーション装置に使用される基板等の発熱や、車両用ナビゲーション装置が車両のダッシュボード等に取り付けられた場合の車両エンジン等の発熱による温度上昇の影響を受ける。従来、角速度センサのオフセット値は、角速度が「0」になる車両停止時や直進走行時の角速度センサからの出力電圧を用いて補正されていた。しかしながら、高速道路の走行や、交通量の少ない地域における長時間の走行等、車両の停止頻度が少ないケースでは、角速度センサのオフセット値を定期的に補正することが困難になり、オフセット値の精度が悪化しやすくなる。正確に角速度センサからの出力電圧が「0」になるような直進走行時のオフセット値補正についても、道路形状やドライバの運転状況に左右されやすいので、定期的に行うことが困難になる。また、角速度センサの感度係数は、単位期間内での方位変化量と、角速度センサの出力電圧とから導出される。そのため、式(1)から明らかなように、角速度センサの感度係数は、オフセット値の誤差の影響を受ける。
【0004】
直進走行以外の走行中であっても角速度センサのオフセットおよび感度係数を補正する技術が提案されている。そこでは、所定期間の角速度センサの出力電圧の平均値と、その平均値が算出される期間の車両の方位変化量をもとに、角速度センサのオフセット値および感度係数が補正されている。具体的に説明すると、角速度センサのオフセット値Voffsetは、次のように導出される。
Voffset=1/n・ΣVout−1/Δt・Δθ/n・S ・・・(2)
ここで、nは、角速度センサの出力電圧のサンプル数であり、Δt(sec)は、サンプリング間隔であり、Δθ(deg)は、方位変化量である。方位変化量は、GPS衛星から取得したGPS方位、あるいは地図データをもとに求められる。また、角速度センサの感度係数については、補正されたオフセット値の変化量が小さい、つまり安定した状態において、次のように導出される。
S=(1/n・ΣVout − Voffset)・n/Δθ・Δt ・・・(3)
ここで、Voffsetは、補正されたオフセット値の変化量が小さいような安定した状態において、既知であり定数とされる(例えば、特許文献1)。
【特許文献1】特開2001−330454号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
このような状況下において、角速度センサの感度係数に対して、オフセット値の変化量が小さいような安定した状態になるまで、式(3)におけるVoffsetが安定しないことによって、サンプル数を増やすと、感度係数の誤差が増大する可能性がある。オフセット値が安定するまでには、一般的に、起動時から30分から1時間以上の期間を要する。そのため、例えば、30分程度以下の走行においては、角速度センサの感度係数を正確に補正することが非常に難しくなるとともに、角速度の導出精度も高くない。起動してから短期間に角速度の導出精度を向上させるためには、角速度センサのオフセット値を短期間で高精度に導出することが要求される。
【0006】
本発明はこうした状況に鑑みてなされたものであり、その目的は、起動してから短期間であっても角速度の導出精度を向上させる技術を提供することにある。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明のある態様の角速度センサ補正装置は、GPS衛星からの信号をもとに測位された対象物の測位データと、角速度センサから出力された対象物の角速度とを取得する取得部と、取得部において取得した測位データと角速度とをもとに、対象物の走行状態を推定する推定部と、推定部において推定した対象物の走行状態に応じて、取得部において取得した測位データと角速度との組合せを変更しながら、角速度センサの仮のオフセット値を逐次導出するオフセット値導出部と、オフセット値導出部において逐次導出した角速度センサの仮のオフセット値に対して統計処理を実行することによって、角速度センサから出力された角速度を補正するための角速度センサのオフセット値を導出するオフセット値フィルタ処理部とを備える。オフセット値フィルタ処理部は、推定部において推定した対象物の走行状態に応じて、統計処理の際の忘却係数を変更する。
【0008】
この態様によると、走行状態に応じた仮のオフセット値を導出するとともに、走行状態に応じた忘却係数を使用しながら仮のオフセット値を統計処理することによってオフセット値を導出するので、起動してから短期間であってもオフセット値の導出精度を向上できる。
【0009】
推定部は、対象物の走行状態として、対象物が停止あるいは直進している状態である第1状態か、他の状態である第2状態であるかを推定し、オフセット値導出部は、推定部において第1状態であると推定された場合に、取得部において取得した角速度をもとに、角速度センサの仮のオフセット値を逐次導出し、推定部において第2状態であると推定された場合に、取得部において取得した測位データと角速度とをもとに、角速度センサの仮のオフセット値を逐次導出し、オフセット値フィルタ処理部は、角速度センサのオフセット値導出における、過去に求められた仮のオフセット値の影響が、第2状態よりも第1状態で小さくなるような忘却係数を統計処理の際に使用してもよい。この場合、走行状態としてふたつの状態を規定し、仮のオフセット値の2種類の導出方法およびふたつの忘却係数を用意するので、処理を簡易にできる。
【0010】
取得部において取得した測位データには、対象物の速度が含まれており、推定部は、対象物の走行状態として、対象物が停止している状態である第1状態か、対象物が直進している状態である第2状態か、その他の状態である第3状態であるかを推定し、オフセット値導出部は、推定部において第1状態あるいは第2状態であると推定された場合に、取得部において取得した角速度をもとに、角速度センサの仮のオフセット値を逐次導出し、推定部において第3状態であると推定された場合に、取得部において取得した測位データと角速度とをもとに、角速度センサの仮のオフセット値を逐次導出し、オフセット値フィルタ処理部は、角速度センサのオフセット値導出における、過去に求められた仮のオフセット値の影響が、第1状態、第2状態、第3状態の順に小さくなるような忘却係数を統計処理の際に使用してもよい。この場合、走行状態として3の状態を規定し、仮のオフセット値の3種類の導出方法および3つの忘却係数を用意するので、処理精度を向上できる。
【0011】
取得部において取得した測位データと角速度とをもとに、角速度センサの仮の感度係数を逐次導出する感度係数導出部と、感度係数導出部において逐次導出した角速度センサの仮の感度係数に対して統計処理を実行することによって、角速度センサから出力された角速度を補正するための角速度センサの感度係数を導出する感度係数フィルタ処理部とをさらに備えてもよい。感度係数フィルタ処理部は、角速度センサの動作期間に応じて、統計処理の際の忘却係数を変更してもよい。この場合、仮の感度係数を導出するとともに、角速度センサの動作期間に応じた忘却係数を使用しながら仮の感度係数を統計処理することによって感度係数を導出するので、起動してから短期間であっても感度係数の導出精度を向上できる。
【0012】
本発明の別の態様は、角速度センサ補正方法である。この方法は、GPS衛星からの信号をもとに測位された対象物の測位データと、角速度センサから出力された対象物の角速度とを取得するステップと、取得した測位データと角速度とをもとに、対象物の走行状態を推定するステップと、推定した対象物の走行状態に応じて、取得した測位データと角速度との組合せを変更しながら、角速度センサの仮のオフセット値を逐次導出するステップと、逐次導出した角速度センサの仮のオフセット値に対して統計処理を実行することによって、角速度センサから出力された角速度を補正するための角速度センサのオフセット値を導出するステップとを備える。角速度センサのオフセット値を導出するステップは、推定した対象物の走行状態に応じて、統計処理の際の忘却係数を変更する。
【0013】
なお、以上の構成要素の任意の組合せ、本発明の表現を方法、装置、システム、記録媒体、コンピュータプログラムなどの間で変換したものもまた、本発明の態様として有効である。
【発明の効果】
【0014】
本発明によれば、起動してから短期間であっても角速度の導出精度を向上できる。
【発明を実施するための最良の形態】
【0015】
(実施例1)
本発明を具体的に説明する前に、まず概要を述べる。本発明の実施例は、車両等に搭載され、車両の旋回による角速度を導出する角速度算出装置に関する。角速度算出装置は、角速度センサからの出力電圧に対して、オフセット値と感度係数とを使用しながら、角速度を導出する。前述のごとく、起動から所定の期間にわたって、角速度センサは、温度の変動の影響を受けるので、オフセット値が正確に導出されない。また、オフセット値の誤差は、感度係数の算出精度に影響を与える。その結果、このような状態において、角速度の精度が悪化している。これに対応するために、本実施例に係る角速度算出装置は、次の処理を実行する。
【0016】
角速度算出装置は、車両に搭載された角速度センサから出力電圧を入力するとともに、車両に搭載されたGPS受信機から測位データを入力する。ここで、角速度センサからの出力電圧が、車両の角速度に相当する。また、測位データには、車両の方位、車両の速度、車両の高度等が含まれる。角速度算出装置は、測位データと出力電圧とをもとに、車両の走行状態を推定する。走行状態として、例えば、停止状態、直進走行状態、非直進走行状態のいずれかが特定される。また、角速度算出装置は、走行状態に応じた導出方法にて仮のオフセット値を逐次導出する。さらに、角速度算出装置は、逐次導出した仮のオフセット値に対してフィルタ処理を実行する。ここで、フィルタは、ローパスフィルタに相当する。また、フィルタに設定される忘却係数は、走行状態に応じて決定される。例えば、停止状態や直進走行状態では、仮のオフセット値の精度が高いので、過去の値の影響を小さくするような忘却係数が設定される。一方、非直進走行状態では、仮のオフセット値の精度が低いので、過去の値の影響を大きくするような忘却係数が設定される。フィルタの出力値がオフセット値に相当する。
【0017】
角速度算出装置は、測位データと出力電圧とをもとに、仮の感度係数を逐次導出する。また、角速度算出装置は、オフセット値の場合と同様に、逐次導出した仮の感度係数に対してフィルタ処理を実行する。ここで、フィルタに設定される忘却係数は、角速度算出装置の動作期間に応じて設定される。例えば、起動直後では、過去の値の影響を小さくするような忘却係数が設定される。一方、起動から一定期間後では、過去の値の影響を大きくするような忘却係数が設定される。フィルタの出力値が感度係数に相当する。最終的に、角速度算出装置は、角速度センサからの出力電圧、オフセット値、感度係数とをもとに角速度を算出する。
【0018】
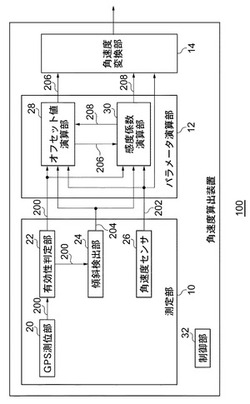
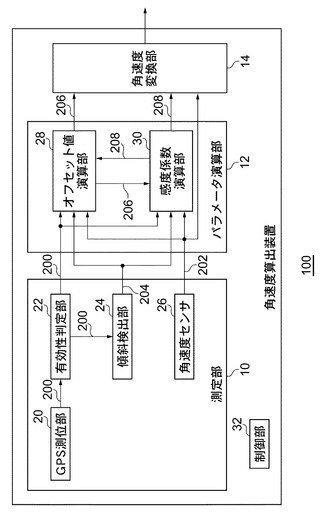
図1は、本発明の実施例1に係る角速度算出装置100の構成を示す。角速度算出装置100は、測定部10、パラメータ算出装置12、角速度変換部14、制御部32を含む。また、測定部10は、GPS測位部20、有効性判定部22、傾斜検出部24、角速度センサ26を含み、パラメータ算出装置12は、オフセット値演算部28、感度係数演算部30を含む。さらに信号として、GPS測位データ200、出力信号202、傾斜角度204、オフセット値206、感度係数208が含まれる。
【0019】
GPS測位部20は、図示しないGPS衛星からの信号を受信して、GPS測位データ200を算出する。GPS測位データ200には、経緯度、車両の高度であるGPS高度、移動速度であるGPS速度、車両の方位であるGPS方位、PDOP(Position Dilution Precision)、捕捉衛星数等が含まれる。ここで、PDOPは、GPS測位データ200におけるGPS衛星位置の誤差が受信点位置にどのように反映されるかの指標であり、測位誤差に相当する。なお、GPS測位データ200には、これら以外の値が含まれていてもよい。また、GPS測位データ200の算出は、公知の技術によってなされればよいので、ここでは説明を省略する。また、GPS測位部20は、GPS測位データ200をサンプリング間隔ごとに、つまり周期的に算出する。GPS測位部20は、GPS測位データ200を有効性判定部22へ逐次出力する。
【0020】
有効性判定部22は、GPS測位部20からのGPS測位データ200を逐次入力する。有効性判定部22は、GPS測位データ200から、GPS測位データ200それぞれの有効性を判定する。例えば、有効性判定部22は、PDOPの値が第1のしきい値以下であり、かつGPS速度が第2のしきい値以上である場合に、それらに対応したGPS方位が有効であると判定する。また、有効性判定部22は、上記の条件が満たされない場合に、対応したGPS方位が無効であると判定する。これは、一般的にPDOPの値が大きい場合やGPS速度が小さい場合に、GPS方位の精度が低くなる傾向があるからである。さらに具体的に説明すると、PDOPの値が6以下であり、かつGPS速度が20km/h以上である場合に、有効性判定部22は、GPS方位の有効性をフラグで表す。
【0021】
また、有効性判定部22は、GPS速度が第3のしきい値以上である場合に、当該GPS速度が有効であると判定する。ここで、第3のしきい値は、第2のしきい値と同じでもよい。さらに、有効性判定部22は、所定の期間でのGPS高度の差が、第4のしきい値以下である場合に、当該GPS高度が有効であると判定する。このような処理の結果、有効性判定部22は、GPS測位データ200に含まれたGPS方位等の各値に対して、有効あるいは無効が示されたフラグを付加する(以下、フラグが付加されたGPS測位データ200もまた「GPS測位データ200」という)。有効性判定部22は、傾斜検出部24、オフセット値演算部28、感度係数演算部30へGPS測位データ200を逐次出力する。
【0022】
傾斜検出部24は、有効性判定部22からGPS測位データ200、特にGPS測位データ200に含まれたGPS高度を逐次入力する。傾斜検出部24は、逐次入力したGPS高度をもとに、サンプリング間隔における車両の平均傾斜角度(以下、「傾斜角度204」という)を検出する。具体的に説明すると、傾斜検出部24は、連続したGPS高度の差異を逐次計算してから、計算結果を平均した後に、平均値をサンプリング間隔で除算することによって、傾斜角度204を導出する。ここで、連続したGPS高度の間隔が、サンプリング間隔に相当する。傾斜検出部24は、オフセット値演算部28、感度係数演算部30へ傾斜角度204を出力する。
【0023】
角速度センサ26は、例えば、振動ジャイロ等のジャイロ装置に相当し、車両の進行方向の変化を車両の相対的な角度変化として検出する。つまり、角速度センサ26は、車両の旋回角速度を検出する。検出された角速度は、例えば、0V〜5Vのアナログ信号として出力される。その際、時計回りの旋回に対応した正の角速度は5V側への2.5Vからの偏差電圧として出力され、反時計回りの旋回に対応した負の角速度は0V側への2.5Vからの偏差電圧として出力される。また、2.5Vは、角速度のオフセット値、つまり零点であり、温度等の影響を受けドリフトする。
【0024】
また、2.5Vからの角速度の偏差程度である感度係数(mV/deg/sec)は、水平な状態において許容誤差内に収まる所定の値として定められている。この許容誤差原因は、ジャイロ装置の個体差や経年変化、温度による影響等である。ジャイロ装置の電圧値は、図示しないAD(Analog to Digital)変換装置によって、例えば、サンプリング間隔100msecでAD変換され、その結果のデジタル信号が出力される。当該デジタル信号は、前述の出力電圧に相当し、以下では、出力信号202という用語を使用する。なお、ジャイロ装置として、公知の技術が使用されればよいので、ここでは説明を省略する。角速度センサ26は、オフセット値演算部28、感度係数演算部30、角速度変換部14へ出力信号202を出力する。
【0025】
オフセット値演算部28は、有効性判定部22からのGPS測位データ200、傾斜検出部24からの傾斜角度204、角速度センサ26からの出力信号202を入力する。また、オフセット値演算部28は、感度係数演算部30から感度係数208も入力する。オフセット値演算部28は、GPS測位データ200、出力信号202、傾斜角度204、感度係数208とをもとに、角速度センサ26のオフセット値(以下、「オフセット値206」という)を算出する。なお、オフセット値演算部28での処理の詳細は後述する。オフセット値演算部28は、オフセット値206を角速度変換部14へ出力する。
【0026】
感度係数演算部30は、有効性判定部22からのGPS測位データ200、傾斜検出部24からの傾斜角度204、角速度センサ26からの出力信号202を入力する。また、感度係数演算部30は、オフセット値演算部28からオフセット値206も入力する。感度係数演算部30は、GPS測位データ200、出力信号202、傾斜角度204、オフセット値206とをもとに、角速度センサ26の感度係数(以下、前述の「感度係数208」という)を算出する。なお、感度係数演算部30での処理の詳細は後述する。感度係数演算部30は、感度係数208を角速度変換部14へ出力する。
【0027】
角速度変換部14は、角速度センサ26からの出力信号202、オフセット値演算部28からのオフセット値206、感度係数演算部30からの感度係数208を入力する。角速度変換部14は、出力信号202、オフセット値206、感度係数208をもとに、前述の式(1)を計算することによって、車両の角速度ωを算出する。角速度変換部14は、角速度ωを出力する。制御部32は、角速度算出装置100全体の動作を制御する。
【0028】
この構成は、ハードウエア的には、任意のコンピュータのCPU、メモリ、その他のLSIで実現でき、ソフトウエア的にはメモリにロードされたプログラムなどによって実現されるが、ここではそれらの連携によって実現される機能ブロックを描いている。したがって、これらの機能ブロックがハードウエアのみ、ソフトウエアのみ、またはそれらの組合せによっていろいろな形で実現できることは、当業者には理解されるところである。
【0029】
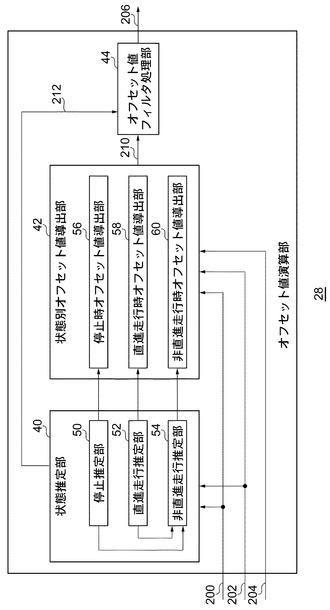
図2は、オフセット値演算部28の構成を示す。オフセット値演算部28は、状態推定部40、状態別オフセット値導出部42、オフセット値フィルタ処理部44を含む。また、状態推定部40は、停止推定部50、直進走行推定部52、非直進走行推定部54を含み、状態別オフセット値導出部42は、停止時オフセット値導出部56、直進走行時オフセット値導出部58、非直進走行時オフセット値導出部60を含む。さらに信号として、仮オフセット値210、走行状態情報212が含まれる。
【0030】
状態推定部40は、GPS測位データ200、出力信号202、傾斜角度204を入力する。状態推定部40は、停止推定部50、直進走行推定部52、非直進走行推定部54において、車両の走行状態を推定する。ここでは、車両の走行状態として、車両が停止あるいは直進している状態であるか、残りの状態、つまり非直進走行している状態であるかを推定する。また、状態推定部40は、判定結果を走行状態情報212としてオフセット値フィルタ処理部44へ出力する。
【0031】
停止推定部50は、図示しない有効性判定部22において有効であると判定されたGPS測位データ200を取得する。また、停止推定部50は、GPS測位データ200からGPS速度を抽出し、GPS速度が「0」であるかを確認する。一方、停止推定部50は、所定期間内における出力信号202の分散値を計算し、分散値と第5のしきい値とを比較する。停止推定部50は、GPS速度が0であり、かつ分散値が第5のしきい値よりも小さい場合に、車両が停止状態であると判定する。前述のごとく、GPS速度が小さい場合、その精度は低くなる傾向があるが、停止推定部50は、出力信号202の分散値を併せて使用することによって停止と判断する。ここで、所定期間は、例えば、GPS速度のサンプリング間隔である1secとされる。所定期間において、出力信号202の分散値が小さいときは、車両の揺れ等がない安定した状態であると推定される。停止推定部50は、停止状態ではないと判定した場合、その旨を非直進走行推定部54へ出力する。
【0032】
直進走行推定部52は、図示しない有効性判定部22において有効であると判定されたGPS測位データ200を取得する。また、直進走行推定部52は、GPS測位データ200からGPS方位を抽出し、GPS方位の所定期間にわたる変化(以下、「GPS方位変化」という)を導出する。さらに、直進走行推定部52は、GPS方位変化が「0」であるかを確認する。また、直進走行推定部52は、所定期間における出力信号202の分散値を計算し、分散値と第6のしきい値とを比較する。なお、第6のしきい値は、第5のしきい値と同一であってもよい。ここで、所定期間は、例えば、GPS方位変化が連続して0であるような期間に設定される。
【0033】
直進走行推定部52は、GPS方位変化が0であり、かつ分散値が第6のしきい値よりも小さい場合に、車両が直進走行状態であると判定する。所定期間において、出力信号202の分散値が小さいときは、微妙な蛇行等の影響がない直進走行状態であると推定される。なお、ドライバの運転状況や道路形状によるが、例えば、市街地等において、直進走行状態の検出頻度は、一般的に、停止推定部50による停止状態の判定よりも少なく、その期間は数秒間程度である。直進走行推定部52は、直進走行状態ではないと判定した場合、その旨を非直進走行推定部54へ出力する。ここで、停止推定部50において停止状態と判定され、直進走行推定部52において直進走行状態であると判定された場合、停止推定部50の判定結果が優先される。非直進走行推定部54は、停止推定部50から、停止状態ではない旨を入力し、かつ直進走行推定部52から、直進走行状態ではない旨を入力した場合、車両が非直進走行状態であると判定する。
【0034】
状態別オフセット値導出部42は、GPS測位データ200、出力信号202、傾斜角度204、感度係数208を入力する。状態別オフセット値導出部42は、状態推定部40において推定した車両の走行状態に応じて、角速度センサ26の仮オフセット値210を逐次導出する。ここで、停止推定部50において停止状態と判定された場合、停止時オフセット値導出部56が出力信号202をもとに仮オフセット値210を逐次導出する。また、直進走行推定部52において直進走行状態と判定された場合、直進走行時オフセット値導出部58が出力信号202をもとに仮オフセット値210を逐次導出する。
【0035】
また、直進走行時オフセット値導出部58において非直進走行状態と判定された場合、非直進走行時オフセット値導出部60がGPS測位データ200、出力信号202、傾斜角度204、感度係数208をもとに仮オフセット値210を逐次導出する。つまり、車両の走行状態に応じて停止時オフセット値導出部56から非直進走行時オフセット値導出部60は、GPS測位データ200、出力信号202等の組合せを変更しながら、仮オフセット値210を導出する。
【0036】
停止時オフセット値導出部56は、停止状態と判定された場合に、出力信号202をもとに、角速度センサ26の仮オフセット値210を逐次導出する。具体的に説明すると、停止時オフセット値導出部56は、停止時に車両の旋回角速度が「0」になることを利用し、出力信号202の平均値を仮オフセット値210として算出する。直進走行時オフセット値導出部58は、直進走行状態と判定された場合に、出力信号202をもとに、角速度センサ26の仮オフセット値210を逐次導出する。具体的に説明すると、ここでも車両の旋回角速度が0であるので、直進走行時オフセット値導出部58は、出力信号202の平均値を仮オフセット値210として算出する。
【0037】
非直進走行時オフセット値導出部60は、非直進走行状態であると判定された場合に、GPS測位データ200中のGPS方位、傾斜角度204、出力信号202、感度係数208とをもとに、例えば、GPS方位のサンプリング間隔における仮オフセット値210を逐次導出する。ここで、仮オフセット値210は、次のように導出される。
Goffset=1/n・ΣGout−Δθ・Gsensitivity・cos(α) ・・・(4)
ここで、nは、GPS方位のサンプリング間隔における出力信号202のサンプル数であり、ΣGout(mV)は、GPS方位のサンプリング間隔における出力信号202の合計値である。また、Δθ(deg)は、GPS方位変化量であり、Gsensitivity(mV/deg/sec)は、感度係数208であり、α(deg)は、車両の傾斜角度204である。
【0038】
感度係数208は、通常、図示しない感度係数演算部30から入力されるが、角速度算出装置100の起動直後などのような状態において、感度係数208が未だ算出されていないこともありえる。そのような場合、非直進走行時オフセット値導出部60は、図示しないジャイロ装置の仕様によって決定される感度係数208を初期値として使用する。また、非直進走行時オフセット値導出部60は、前回の走行終了時に感度係数演算部30からの感度係数208を記憶しておき、初期値として使用してもよい。
【0039】
オフセット値フィルタ処理部44は、状態別オフセット値導出部42において逐次導出した仮オフセット値210を入力する。オフセット値フィルタ処理部44は、仮オフセット値210に対して統計処理を実行することによって、角速度センサ26のオフセット値206を導出する。以下では、図3を使用しながら、オフセット値フィルタ処理部44での処理を説明する。
【0040】
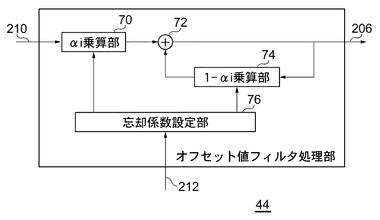
図3は、オフセット値フィルタ処理部44の構成を示す。オフセット値フィルタ処理部44は、αi乗算部70、加算部72、1−αi乗算部74、忘却係数設定部76を含む。図示のごとく、オフセット値フィルタ処理部44は、IIR(Infinite Impulse Responce)フィルタを含むように構成されており、IIRフィルタによってローパスフィルタを構成する。αi乗算部70は、仮オフセット値210に忘却係数「αi」を乗算する。ここで、「i」は、1あるいは2である。そのため、忘却係数「αi」は、α1、α2の総称である。なお、α1およびα2については後述する。αi乗算部70は、乗算結果を加算部72へ出力する。
【0041】
加算部72は、αi乗算部70からの乗算結果と、1−αi乗算部74からの乗算結果とを逐次加算する。加算部72は、加算結果をオフセット値206として逐次出力する。1−αi乗算部74は、オフセット値206に係数「1−αi」を乗算する。なお、係数「1−αi」のうちの「αi」は、αi乗算部70でのαiと同様であるので、ここでは説明を省略する。1−αi乗算部74は、加算部72へ乗算結果をフィードバックする。忘却係数設定部76は、走行状態情報212を入力する。また、忘却係数設定部76は、走行状態情報212にて示された状態に応じて、忘却係数「αi」の値を決定する。さらに、忘却係数設定部76は、決定した忘却係数「αi」をαi乗算部70および1−αi乗算部74へ設定する。
【0042】
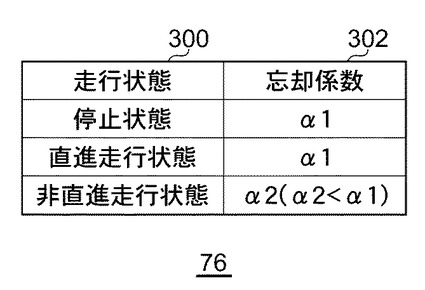
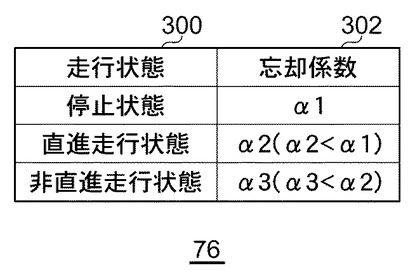
図4は、忘却係数設定部76において記憶されるテーブルのデータ構造を示す。図示のごとく、走行状態欄300、忘却係数欄302が含まれる。走行状態欄300には、走行状態情報212にて示される各状態が含まれる。忘却係数欄302には、各状態に対応した忘却係数「αi」を記憶する。つまり、停止状態と直進走行状態に対して忘却係数「α1」が対応づけられ、非直進走行状態に対して忘却係数「α2」が対応づけられる。ここで、α2<α1の規定がなされる。図3に戻る。忘却係数設定部76は、図4のテーブルを参照しながら、走行状態情報212にて示された状態から忘却係数「α1」あるいは「α2」を選択する。このように、忘却係数設定部76は、車両の走行状態に応じて、フィルタ処理の際の忘却係数を変更する。
【0043】
ここでは、忘却係数を変更する理由を説明する。オフセット値フィルタ処理部44の構成より、時刻tにおけるオフセット値206Voffset(t)は、次のように示される。
Voffset(t)=αiGoffset(t)+(1−αi)Voffset(t−1) ・・・(5)
なお、Goffset(t)は、時刻tにおける仮オフセット値210である。つまり、αiが大きくなると、Voffset(t)のうちのGoffset(t)の影響が大きくなり、αiが小さくなると、Voffset(t)のうちのVoffset(t−1)の影響が多くなる。これは、前者の場合において新しい仮オフセット値210の影響が大きくなり、後者の場合において過去の仮オフセット値210の影響が大きくなることに相当する。
【0044】
例えば、停止状態あるいは直進走行状態において、仮オフセット値210は、車両の旋回角速度が0である状態の出力信号202から導出されるので、その信頼度は高い。そのため、これらの状態において順次導出されるオフセット値206に対して、非直進走行状態よりも、新たに導出された仮オフセット値210の重み付けを大きくした平均化処理がなされる。これは、過去の仮オフセット値210の影響が小さくなるような忘却係数を使用することに相当する。
【0045】
一方、非直進走行時においては、式(4)のGPS方位変化量から求められるΔθや車両の平均傾斜角度αに誤差等が含まれる可能性がある。ここで、仮オフセット値210のドリフトは温度による影響等によるものであるので、仮オフセット値210の変動にはある連続性を持った特性が存在すると推測される。そのため、その特性に適したローパスフィルタを使用することによって、式(4)から導かれたオフセット値に含まれる誤差を吸収できる。具体的には、その特性に適したローパスフィルタとは、過去の仮オフセット値210の影響が大きくなるような忘却係数を使用することに相当する。
【0046】
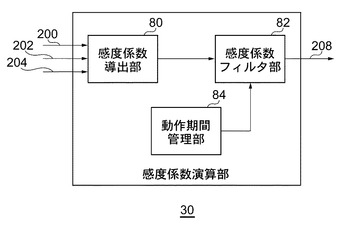
図5は、感度係数演算部30の構成を示す。感度係数演算部30は、感度係数導出部80、感度係数フィルタ部82、動作期間管理部84を含む。感度係数導出部80は、GPS測位データ200、出力信号202、傾斜角度204を入力する。また、感度係数演算部30は、オフセット値206も入力する。また、感度係数導出部80は、GPS測位データ200、出力信号202、傾斜角度204、オフセット値206とをもとに、角速度センサ26の仮の感度係数を逐次導出する。
【0047】
具体的に説明すると、感度係数導出部80は、GPS測位データ200においてGPS方位が有効であると示されている場合、次のように、GPS方位のサンプリング間隔における角速度センサ26の仮の感度係数を算出する。
Gsensitivity=(1/n・ΣGout−Goffset)/Δθ/cos(α) ・・・(6)
ここで、Goffsetは、図示しないオフセット値演算部28から入力されるが、角速度算出装置100の起動直後などのような状態において、オフセット値206が未だ算出されていないこともありえる。式(6)には、Δθによる除算が含まれるので、Δθが所定値以上であるときに感度係数を算出する。Δθの値が所定値以下であるときは、感度係数導出部80は、直前に補正した感度係数を出力する。
【0048】
感度係数フィルタ部82は、感度係数導出部80において逐次導出した仮の感度係数を入力する。感度係数フィルタ部82は、仮の感度係数に対して統計処理を実行することによって、角速度センサ26の感度係数208を導出する。感度係数フィルタ部82は、図4に示されたオフセット値フィルタ処理部44と同様に、IIRフィルタにて構成されており、IIRフィルタは、ローパスフィルタを構成する。その結果、式(6)におけるGPS方位変化量から求められるΔθや、車両の平均傾斜角度αに含まれる誤差が吸収される。また、感度係数フィルタ部82は、動作期間管理部84からの指示をもとに、IIRフィルタでの忘却係数を設定する。
【0049】
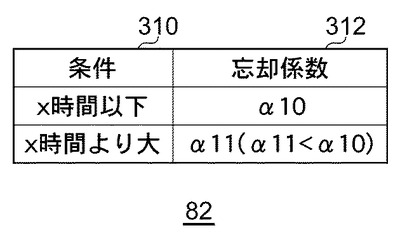
動作期間管理部84は、角速度センサ26の動作期間に応じて、感度係数フィルタ部82での忘却係数を変更する。また、動作期間管理部84は、変更した忘却係数の使用を感度係数フィルタ部82へ指示する。図6は、感度係数フィルタ部82において記憶されるテーブルのデータ構造を示す。図示のごとく、条件欄310、忘却係数欄312が示される。条件欄310には、忘却係数を決定するための動作期間に関する条件として、「x時間以下」、「x時間より大」が示されている。忘却係数欄312には、条件欄310での各条件に対応した忘却係数の値が示される。具体的には、「x時間以下」の場合に対して、忘却係数α10が設定されており、「x時間より大」の場合に対して、忘却係数α11が規定されている。また、α11<α10の関係が規定されている。つまり、起動からx時間以下の場合において、起動からx時間よりも大の場合よりも、新たに導出された仮オフセット値210の重み付けを大きくした平均化処理がなされる。
【0050】
また、ここでは、GPS方位のサンプリング間隔における仮の感度係数を算出する例を示したが、Goffsetおよびαの変動が微小である場合、あるいはΔθの値が所定値以上にならない場合は、算出の間隔が大きくされてもよい。つまり、仮の感度係数の導出は、GPS方位のサンプリング間隔に限定されない。
【0051】
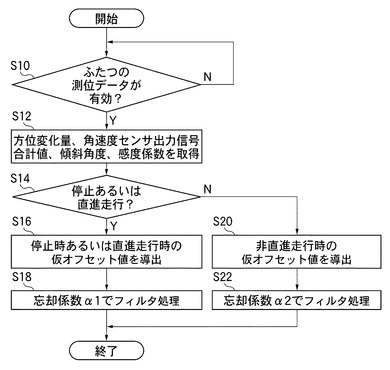
以上の構成による角速度算出装置100の動作を説明する。図7は、角速度算出装置100によるオフセット値の導出手順を示すフローチャートである。有効性判定部22は、GPS測位部20において測位されたふたつのGPS測位データ200の有効性を判定する(S10)。ふたつのGPS測位データ200は、サンプリング間隔時間だけ離れたタイミングでのGPS測位データ200に相当する。有効でなければ(S10のN)、待機する。ともに有効であれば(S10のY)、オフセット値演算部28は、GPS測位データ200のサンプリング間隔における車両のGPS方位変化量と、角速度センサ26の出力信号202の合計値、傾斜検出部24が出力する車両の傾斜角度204、感度係数演算部30が出力する感度係数208を取得する(S12)。
【0052】
状態推定部40は、取得した各種情報をもとに、車両の走行状態が停止あるいは直進走行状態であるかを判定する(S14)。停止あるいは直進走行状態であれば(S14のY)、停止時オフセット値導出部56あるいは直進走行時オフセット値導出部58は、取得した各種情報をもとに角速度センサ26の仮オフセット値210を算出する(S16)。オフセット値フィルタ処理部44は、忘却係数α1でフィルタ処理を実行する(S18)。一方、停止あるいは直進走行状態でなければ(S14のN)、非直進走行時オフセット値導出部60は、取得した各種情報をもとに角速度センサ26の仮オフセット値210を算出する(S20)。オフセット値フィルタ処理部44は、忘却係数α2でフィルタ処理を実行する(S22)。
【0053】
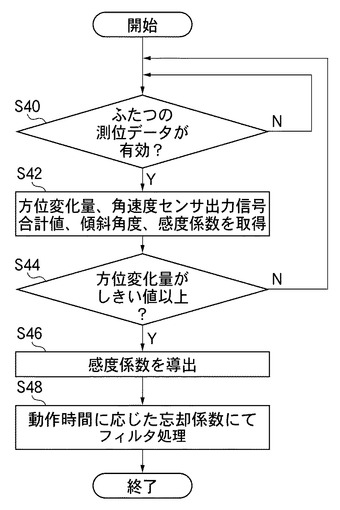
図8は、角速度算出装置100による感度係数の導出手順を示すフローチャートである。有効性判定部22は、GPS測位部20において測位されたふたつのGPS測位データ200の有効性を判定する(S40)。ふたつのGPS測位データ200は、サンプリング間隔時間だけ離れたタイミングでのGPS測位データ200に相当する。有効でなければ(S40のN)、待機する。ともに有効であれば(S40のY)、感度係数演算部30は、GPS測位データ200のサンプリング間隔における車両のGPS方位変化量と、角速度センサ26の出力信号202の合計値、傾斜検出部24が出力する車両の傾斜角度204、感度係数演算部30が出力する感度係数208を取得する(S42)。
【0054】
感度係数導出部80は、取得したGPS方位変化量が所定値以上でないと判定すれば(S44のN)、ステップ40に戻る。一方、感度係数導出部80は、取得したGPS方位変化量が所定値以上であると判定すれば(S44のY)、取得した各種情報に基づいて角速度センサ26の仮の感度係数を導出する(S46)。感度係数フィルタ部82は、動作時間に応じた忘却係数にて、仮の感度係数に対してフィルタ処理を実行する(S48)。
【0055】
本発明の実施例によれば、走行状態に応じた仮オフセット値を導出するとともに、走行状態に応じた忘却係数を使用しながら仮オフセット値をフィルタ処理することによってオフセット値を導出するので、起動してから短期間であってもオフセット値に含まれる誤差を低減できる。また、オフセット値に含まれる誤差が低減されるので、オフセット値の導出精度を向上できる。また、角速度センサのオフセット値について、車両の傾斜角度を考慮するので、導出精度をさらに向上できる。また、GPS方位のサンプリング間隔といった短い時間にて、車両の走行状態に応じた最適なオフセット値を導出するので、オフセット値のドリフトに精度よく追随できる。
【0056】
また、仮の感度係数を導出するとともに、角速度センサの動作期間に応じた忘却係数を使用しながら仮の感度係数をフィルタ処理することによって感度係数を導出するので、起動してから短期間であっても感度係数に含まれる誤差を低減できる。また、感度係数に含まれる誤差が低減されるので、感度係数の導出精度を向上できる。また、走行状態として実質的にふたつの状態を規定し、仮オフセット値の2種類の導出方法およびα1およびα2の忘却係数を用意するので、処理を簡易にできる。また、角速度センサの感度係数について、車両の傾斜角度およびその変動を考慮して算出するので、傾斜のある道路の走行時においても導出精度を向上できる。また、オフセット値のドリフトに精度よく追随できるので、ナビゲーション装置の起動直後から感度係数を正確に導出できる。また、オフセット値と感度係数との導出精度が向上されるので、角速度の導出精度を向上できる。
【0057】
(実施例2)
実施例2は、実施例1と同様に角速度算出装置100に関する。実施例1においては、走行状態として、停止状態、直進走行状態、非直進走行状態への分類がなされている。また、状態別オフセット値導出部42、オフセット値フィルタ処理部44は、停止状態および直進走行状態に対して同様の処理を実行しているので、実施例1では、実質的にふたつの状態のそれぞれに対して異なった処理がなされているといえる。一方、実施例に2に係る角速度算出装置100は、停止状態に対する忘却係数と、直進走行状態に対する忘却係数とに異なった値を設定する。そのため、実施例2では、3つの状態のそれぞれに対して異なった処理がなされているといえる。実施例に2に係る角速度算出装置100、オフセット値演算部28、オフセット値フィルタ処理部44、感度係数演算部30は、それぞれ図1、図2、図3、図5と同様のタイプである。そのため、ここでは、差異を中心に説明する。
【0058】
図9は、本発明の実施例2に係る忘却係数設定部76において記憶されるテーブルのデータ構造を示す図である。図9のテーブルは、図4と同様に示されている。忘却係数欄302には、停止状態に対応した忘却係数「α1」、直進走行状態に対応した忘却係数「α2」、非直進走行状態に対応した忘却係数「α3」が示されている。ここで、α1>α2>α3となっており、停止状態、直進走行状態、非直進走行状態の順に、過去の仮オフセット値210の影響が小さくなる。忘却係数設定部76は、前述のごとく、当該デーブルを参照しながら走行状態情報212をもとに、忘却係数を選択する。また、忘却係数設定部76は、選択した忘却係数をαi乗算部70および1−αi乗算部74に設定する。
【0059】
本発明の実施例によれば、走行状態として3つの状態に対して、3つの忘却係数を用意するので、各状態に適合したフィルタ処理を実現できる。また、各状態に適合したフィルタ処理が実現されるので、処理精度を向上できる。
【0060】
以上、本発明を実施例をもとに説明した。この実施例は例示であり、それらの各構成要素や各処理プロセスの組合せにいろいろな変形例が可能なこと、またそうした変形例も本発明の範囲にあることは当業者に理解されるところである。
【0061】
本発明の実施例において、オフセット値演算部28、感度係数演算部30は、式(4)、式(6)を計算する際に、GPS測位データ200に含まれたGPS方位をもとにしたΔθを使用している。しかしながらこれに限らず例えば、オフセット値演算部28、感度係数演算部30は、図示しない地図データベースを用いて、車両がマッチングしている道路方位を利用してもよい。なお、地図データベースへの車両のマッチングには、GPS測位データ200が使用される。本変形例によれば、角速度算出装置100の構成の自由度を向上できる。
【0062】
本発明の実施例において、傾斜検出部24は、GPS高度を利用して車両の傾斜角度204を算出している。しかしながらこれに限らず例えば、傾斜検出部24が加速度センサを備え、加速度センサからの情報を利用して傾斜角度204を算出してもよい。または、傾斜検出部24は、図示しない地図データベースに含まれる道路情報に高度情報が存在する場合に、車両がマッチングしている道路の高度情報を利用してもよい。本変形例によれば、傾斜角度204を高精度に導出できる。
【0063】
本発明の実施例において、オフセット値演算部28、感度係数演算部30は、仮オフセット値210、仮の感度係数を導出する際に、傾斜角度204を使用している。しかしながらこれに限らず例えば、傾斜角度204は使用されなくてもよい。その際、式(4)、式(6)でのαは0にされる。本変形例によれば、処理を簡易にできる。
【0064】
本発明の実施例において、状態推定部40は、車両の走行状態判定として、GPS測位データ200に含まれたGPS速度を使用して、停止状態を判定している。しかしながらこれに限らず例えば、状態推定部40は、図示しないパルス検出部からの車両の車速パルス信号を入力し、車速パルスをもとに停止状態を判定してもよい。ここで、パルス検出部は、図示しない速度センサに接続されており、速度センサは、ドライブシャフトの回転に対応して回転するスピードメータケーブルの中間に設置され、ドライブシャフトの回転に伴った車速パルス信号を出力する。本変形例によれば、さまざまな手段によって車両の速度を測定できる。
【0065】
本発明の実施例において、有効性判定部22は、GPS測位データ200の有効性を判定するために、PDOPを使用している。しかしながらこれに限らず例えば、有効性判定部22は、GDOP(Geometric Dilution Of Precision)、HDOP(Horizontal Dilution Of Precision)等や、これらの組合せを使用してもよい。本変形例によれば、さまざまなパラメータを判定に使用できる。
【0066】
本発明の実施例において、オフセット値フィルタ処理部44や感度係数フィルタ部82は、IIRフィルタを含むように形成されている。しかしながらこれに限らず例えば、オフセット値フィルタ処理部44や感度係数フィルタ部82は、FIR(Finite Impulse Response)フィルタを含むように形成されていてもよい。その際、忘却係数は、タップ係数として設定される。本変形例によれば、フィルタ構成の自由度を向上できる。
【図面の簡単な説明】
【0067】
【図1】本発明の実施例1に係る角速度算出装置の構成を示す図である。
【図2】図1のオフセット値演算部の構成を示す図である。
【図3】図1のオフセット値フィルタ処理部の構成を示す図である。
【図4】図3の忘却係数設定部において記憶されるテーブルのデータ構造を示す図である。
【図5】図1の感度係数演算部の構成を示す図である。
【図6】図5の感度係数フィルタ部において記憶されるテーブルのデータ構造を示す図である。
【図7】図1の角速度算出装置によるオフセット値の導出手順を示すフローチャートである。
【図8】図1の角速度算出装置による感度係数の導出手順を示すフローチャートである。
【図9】本発明の実施例2に係る忘却係数設定部において記憶されるテーブルのデータ構造を示す図である。
【符号の説明】
【0068】
10 測定部、 12 パラメータ算出装置、 14 角速度変換部、 20 GPS測位部、 22 有効性判定部、 24 傾斜検出部、 26 角速度センサ、 28 オフセット値演算部、 30 感度係数演算部、 32 制御部、 40 状態推定部、 42 状態別オフセット値導出部、 44 オフセット値フィルタ処理部、 50 停止推定部、 52 直進走行推定部、 54 非直進走行推定部、 56 停止時オフセット値導出部、 58 直進走行時オフセット値導出部、 60 非直進走行時オフセット値導出部、 70 αi乗算部、 72 加算部、 74 1−αi乗算部、 76 忘却係数設定部、 80 感度係数導出部、 82 感度係数フィルタ部、 84 動作期間管理部、 100 角速度算出装置。
【技術分野】
【0001】
本発明は、角速度センサ補正技術に関し、特に角速度センサからの出力信号を補正するための値を導出する角速度センサ補正装置および角速度センサ補正方法に関する。
【背景技術】
【0002】
車両用ナビゲーション装置では、一般的に、自立航法から算出された位置と、GPS(Global Positioning System)から算出された位置とが合成されることによって、最適な位置が推定される。自立航法では、車両の速度を示す速度パルスと、角速度センサによって計測された車両の旋回角速度とをもとに、前回の測位位置を更新することによって、現在の位置が算出される。このような方式のナビゲーション装置によれば、GPS衛星からの電波の受信が困難なトンネル、地下駐車場や高層ビルの谷間であっても、自立航法によって自車位置の導出が可能である。車両の旋回による角速度ωは、次の式によって導出される。
ω=(Vout−Voffset)/S ・・・(1)
ここで、Voutは、角速度センサの出力電圧であり、Voffsetは、角速度センサのオフセット値、S(mV/deg/sec)は、角速度センサの感度係数である。
【0003】
角速度を正確に求めるためには、角速度センサのオフセット値と、感度係数を正確に求める必要がある。角速度センサの感度係数は、一般的に角速度センサの個体差や角速度センサの車両への取り付け角度により異なる。また、オフセット値は温度変化によって変化する可能性がある。つまり、オフセット値は、車両用ナビゲーション装置に使用される基板等の発熱や、車両用ナビゲーション装置が車両のダッシュボード等に取り付けられた場合の車両エンジン等の発熱による温度上昇の影響を受ける。従来、角速度センサのオフセット値は、角速度が「0」になる車両停止時や直進走行時の角速度センサからの出力電圧を用いて補正されていた。しかしながら、高速道路の走行や、交通量の少ない地域における長時間の走行等、車両の停止頻度が少ないケースでは、角速度センサのオフセット値を定期的に補正することが困難になり、オフセット値の精度が悪化しやすくなる。正確に角速度センサからの出力電圧が「0」になるような直進走行時のオフセット値補正についても、道路形状やドライバの運転状況に左右されやすいので、定期的に行うことが困難になる。また、角速度センサの感度係数は、単位期間内での方位変化量と、角速度センサの出力電圧とから導出される。そのため、式(1)から明らかなように、角速度センサの感度係数は、オフセット値の誤差の影響を受ける。
【0004】
直進走行以外の走行中であっても角速度センサのオフセットおよび感度係数を補正する技術が提案されている。そこでは、所定期間の角速度センサの出力電圧の平均値と、その平均値が算出される期間の車両の方位変化量をもとに、角速度センサのオフセット値および感度係数が補正されている。具体的に説明すると、角速度センサのオフセット値Voffsetは、次のように導出される。
Voffset=1/n・ΣVout−1/Δt・Δθ/n・S ・・・(2)
ここで、nは、角速度センサの出力電圧のサンプル数であり、Δt(sec)は、サンプリング間隔であり、Δθ(deg)は、方位変化量である。方位変化量は、GPS衛星から取得したGPS方位、あるいは地図データをもとに求められる。また、角速度センサの感度係数については、補正されたオフセット値の変化量が小さい、つまり安定した状態において、次のように導出される。
S=(1/n・ΣVout − Voffset)・n/Δθ・Δt ・・・(3)
ここで、Voffsetは、補正されたオフセット値の変化量が小さいような安定した状態において、既知であり定数とされる(例えば、特許文献1)。
【特許文献1】特開2001−330454号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
このような状況下において、角速度センサの感度係数に対して、オフセット値の変化量が小さいような安定した状態になるまで、式(3)におけるVoffsetが安定しないことによって、サンプル数を増やすと、感度係数の誤差が増大する可能性がある。オフセット値が安定するまでには、一般的に、起動時から30分から1時間以上の期間を要する。そのため、例えば、30分程度以下の走行においては、角速度センサの感度係数を正確に補正することが非常に難しくなるとともに、角速度の導出精度も高くない。起動してから短期間に角速度の導出精度を向上させるためには、角速度センサのオフセット値を短期間で高精度に導出することが要求される。
【0006】
本発明はこうした状況に鑑みてなされたものであり、その目的は、起動してから短期間であっても角速度の導出精度を向上させる技術を提供することにある。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明のある態様の角速度センサ補正装置は、GPS衛星からの信号をもとに測位された対象物の測位データと、角速度センサから出力された対象物の角速度とを取得する取得部と、取得部において取得した測位データと角速度とをもとに、対象物の走行状態を推定する推定部と、推定部において推定した対象物の走行状態に応じて、取得部において取得した測位データと角速度との組合せを変更しながら、角速度センサの仮のオフセット値を逐次導出するオフセット値導出部と、オフセット値導出部において逐次導出した角速度センサの仮のオフセット値に対して統計処理を実行することによって、角速度センサから出力された角速度を補正するための角速度センサのオフセット値を導出するオフセット値フィルタ処理部とを備える。オフセット値フィルタ処理部は、推定部において推定した対象物の走行状態に応じて、統計処理の際の忘却係数を変更する。
【0008】
この態様によると、走行状態に応じた仮のオフセット値を導出するとともに、走行状態に応じた忘却係数を使用しながら仮のオフセット値を統計処理することによってオフセット値を導出するので、起動してから短期間であってもオフセット値の導出精度を向上できる。
【0009】
推定部は、対象物の走行状態として、対象物が停止あるいは直進している状態である第1状態か、他の状態である第2状態であるかを推定し、オフセット値導出部は、推定部において第1状態であると推定された場合に、取得部において取得した角速度をもとに、角速度センサの仮のオフセット値を逐次導出し、推定部において第2状態であると推定された場合に、取得部において取得した測位データと角速度とをもとに、角速度センサの仮のオフセット値を逐次導出し、オフセット値フィルタ処理部は、角速度センサのオフセット値導出における、過去に求められた仮のオフセット値の影響が、第2状態よりも第1状態で小さくなるような忘却係数を統計処理の際に使用してもよい。この場合、走行状態としてふたつの状態を規定し、仮のオフセット値の2種類の導出方法およびふたつの忘却係数を用意するので、処理を簡易にできる。
【0010】
取得部において取得した測位データには、対象物の速度が含まれており、推定部は、対象物の走行状態として、対象物が停止している状態である第1状態か、対象物が直進している状態である第2状態か、その他の状態である第3状態であるかを推定し、オフセット値導出部は、推定部において第1状態あるいは第2状態であると推定された場合に、取得部において取得した角速度をもとに、角速度センサの仮のオフセット値を逐次導出し、推定部において第3状態であると推定された場合に、取得部において取得した測位データと角速度とをもとに、角速度センサの仮のオフセット値を逐次導出し、オフセット値フィルタ処理部は、角速度センサのオフセット値導出における、過去に求められた仮のオフセット値の影響が、第1状態、第2状態、第3状態の順に小さくなるような忘却係数を統計処理の際に使用してもよい。この場合、走行状態として3の状態を規定し、仮のオフセット値の3種類の導出方法および3つの忘却係数を用意するので、処理精度を向上できる。
【0011】
取得部において取得した測位データと角速度とをもとに、角速度センサの仮の感度係数を逐次導出する感度係数導出部と、感度係数導出部において逐次導出した角速度センサの仮の感度係数に対して統計処理を実行することによって、角速度センサから出力された角速度を補正するための角速度センサの感度係数を導出する感度係数フィルタ処理部とをさらに備えてもよい。感度係数フィルタ処理部は、角速度センサの動作期間に応じて、統計処理の際の忘却係数を変更してもよい。この場合、仮の感度係数を導出するとともに、角速度センサの動作期間に応じた忘却係数を使用しながら仮の感度係数を統計処理することによって感度係数を導出するので、起動してから短期間であっても感度係数の導出精度を向上できる。
【0012】
本発明の別の態様は、角速度センサ補正方法である。この方法は、GPS衛星からの信号をもとに測位された対象物の測位データと、角速度センサから出力された対象物の角速度とを取得するステップと、取得した測位データと角速度とをもとに、対象物の走行状態を推定するステップと、推定した対象物の走行状態に応じて、取得した測位データと角速度との組合せを変更しながら、角速度センサの仮のオフセット値を逐次導出するステップと、逐次導出した角速度センサの仮のオフセット値に対して統計処理を実行することによって、角速度センサから出力された角速度を補正するための角速度センサのオフセット値を導出するステップとを備える。角速度センサのオフセット値を導出するステップは、推定した対象物の走行状態に応じて、統計処理の際の忘却係数を変更する。
【0013】
なお、以上の構成要素の任意の組合せ、本発明の表現を方法、装置、システム、記録媒体、コンピュータプログラムなどの間で変換したものもまた、本発明の態様として有効である。
【発明の効果】
【0014】
本発明によれば、起動してから短期間であっても角速度の導出精度を向上できる。
【発明を実施するための最良の形態】
【0015】
(実施例1)
本発明を具体的に説明する前に、まず概要を述べる。本発明の実施例は、車両等に搭載され、車両の旋回による角速度を導出する角速度算出装置に関する。角速度算出装置は、角速度センサからの出力電圧に対して、オフセット値と感度係数とを使用しながら、角速度を導出する。前述のごとく、起動から所定の期間にわたって、角速度センサは、温度の変動の影響を受けるので、オフセット値が正確に導出されない。また、オフセット値の誤差は、感度係数の算出精度に影響を与える。その結果、このような状態において、角速度の精度が悪化している。これに対応するために、本実施例に係る角速度算出装置は、次の処理を実行する。
【0016】
角速度算出装置は、車両に搭載された角速度センサから出力電圧を入力するとともに、車両に搭載されたGPS受信機から測位データを入力する。ここで、角速度センサからの出力電圧が、車両の角速度に相当する。また、測位データには、車両の方位、車両の速度、車両の高度等が含まれる。角速度算出装置は、測位データと出力電圧とをもとに、車両の走行状態を推定する。走行状態として、例えば、停止状態、直進走行状態、非直進走行状態のいずれかが特定される。また、角速度算出装置は、走行状態に応じた導出方法にて仮のオフセット値を逐次導出する。さらに、角速度算出装置は、逐次導出した仮のオフセット値に対してフィルタ処理を実行する。ここで、フィルタは、ローパスフィルタに相当する。また、フィルタに設定される忘却係数は、走行状態に応じて決定される。例えば、停止状態や直進走行状態では、仮のオフセット値の精度が高いので、過去の値の影響を小さくするような忘却係数が設定される。一方、非直進走行状態では、仮のオフセット値の精度が低いので、過去の値の影響を大きくするような忘却係数が設定される。フィルタの出力値がオフセット値に相当する。
【0017】
角速度算出装置は、測位データと出力電圧とをもとに、仮の感度係数を逐次導出する。また、角速度算出装置は、オフセット値の場合と同様に、逐次導出した仮の感度係数に対してフィルタ処理を実行する。ここで、フィルタに設定される忘却係数は、角速度算出装置の動作期間に応じて設定される。例えば、起動直後では、過去の値の影響を小さくするような忘却係数が設定される。一方、起動から一定期間後では、過去の値の影響を大きくするような忘却係数が設定される。フィルタの出力値が感度係数に相当する。最終的に、角速度算出装置は、角速度センサからの出力電圧、オフセット値、感度係数とをもとに角速度を算出する。
【0018】
図1は、本発明の実施例1に係る角速度算出装置100の構成を示す。角速度算出装置100は、測定部10、パラメータ算出装置12、角速度変換部14、制御部32を含む。また、測定部10は、GPS測位部20、有効性判定部22、傾斜検出部24、角速度センサ26を含み、パラメータ算出装置12は、オフセット値演算部28、感度係数演算部30を含む。さらに信号として、GPS測位データ200、出力信号202、傾斜角度204、オフセット値206、感度係数208が含まれる。
【0019】
GPS測位部20は、図示しないGPS衛星からの信号を受信して、GPS測位データ200を算出する。GPS測位データ200には、経緯度、車両の高度であるGPS高度、移動速度であるGPS速度、車両の方位であるGPS方位、PDOP(Position Dilution Precision)、捕捉衛星数等が含まれる。ここで、PDOPは、GPS測位データ200におけるGPS衛星位置の誤差が受信点位置にどのように反映されるかの指標であり、測位誤差に相当する。なお、GPS測位データ200には、これら以外の値が含まれていてもよい。また、GPS測位データ200の算出は、公知の技術によってなされればよいので、ここでは説明を省略する。また、GPS測位部20は、GPS測位データ200をサンプリング間隔ごとに、つまり周期的に算出する。GPS測位部20は、GPS測位データ200を有効性判定部22へ逐次出力する。
【0020】
有効性判定部22は、GPS測位部20からのGPS測位データ200を逐次入力する。有効性判定部22は、GPS測位データ200から、GPS測位データ200それぞれの有効性を判定する。例えば、有効性判定部22は、PDOPの値が第1のしきい値以下であり、かつGPS速度が第2のしきい値以上である場合に、それらに対応したGPS方位が有効であると判定する。また、有効性判定部22は、上記の条件が満たされない場合に、対応したGPS方位が無効であると判定する。これは、一般的にPDOPの値が大きい場合やGPS速度が小さい場合に、GPS方位の精度が低くなる傾向があるからである。さらに具体的に説明すると、PDOPの値が6以下であり、かつGPS速度が20km/h以上である場合に、有効性判定部22は、GPS方位の有効性をフラグで表す。
【0021】
また、有効性判定部22は、GPS速度が第3のしきい値以上である場合に、当該GPS速度が有効であると判定する。ここで、第3のしきい値は、第2のしきい値と同じでもよい。さらに、有効性判定部22は、所定の期間でのGPS高度の差が、第4のしきい値以下である場合に、当該GPS高度が有効であると判定する。このような処理の結果、有効性判定部22は、GPS測位データ200に含まれたGPS方位等の各値に対して、有効あるいは無効が示されたフラグを付加する(以下、フラグが付加されたGPS測位データ200もまた「GPS測位データ200」という)。有効性判定部22は、傾斜検出部24、オフセット値演算部28、感度係数演算部30へGPS測位データ200を逐次出力する。
【0022】
傾斜検出部24は、有効性判定部22からGPS測位データ200、特にGPS測位データ200に含まれたGPS高度を逐次入力する。傾斜検出部24は、逐次入力したGPS高度をもとに、サンプリング間隔における車両の平均傾斜角度(以下、「傾斜角度204」という)を検出する。具体的に説明すると、傾斜検出部24は、連続したGPS高度の差異を逐次計算してから、計算結果を平均した後に、平均値をサンプリング間隔で除算することによって、傾斜角度204を導出する。ここで、連続したGPS高度の間隔が、サンプリング間隔に相当する。傾斜検出部24は、オフセット値演算部28、感度係数演算部30へ傾斜角度204を出力する。
【0023】
角速度センサ26は、例えば、振動ジャイロ等のジャイロ装置に相当し、車両の進行方向の変化を車両の相対的な角度変化として検出する。つまり、角速度センサ26は、車両の旋回角速度を検出する。検出された角速度は、例えば、0V〜5Vのアナログ信号として出力される。その際、時計回りの旋回に対応した正の角速度は5V側への2.5Vからの偏差電圧として出力され、反時計回りの旋回に対応した負の角速度は0V側への2.5Vからの偏差電圧として出力される。また、2.5Vは、角速度のオフセット値、つまり零点であり、温度等の影響を受けドリフトする。
【0024】
また、2.5Vからの角速度の偏差程度である感度係数(mV/deg/sec)は、水平な状態において許容誤差内に収まる所定の値として定められている。この許容誤差原因は、ジャイロ装置の個体差や経年変化、温度による影響等である。ジャイロ装置の電圧値は、図示しないAD(Analog to Digital)変換装置によって、例えば、サンプリング間隔100msecでAD変換され、その結果のデジタル信号が出力される。当該デジタル信号は、前述の出力電圧に相当し、以下では、出力信号202という用語を使用する。なお、ジャイロ装置として、公知の技術が使用されればよいので、ここでは説明を省略する。角速度センサ26は、オフセット値演算部28、感度係数演算部30、角速度変換部14へ出力信号202を出力する。
【0025】
オフセット値演算部28は、有効性判定部22からのGPS測位データ200、傾斜検出部24からの傾斜角度204、角速度センサ26からの出力信号202を入力する。また、オフセット値演算部28は、感度係数演算部30から感度係数208も入力する。オフセット値演算部28は、GPS測位データ200、出力信号202、傾斜角度204、感度係数208とをもとに、角速度センサ26のオフセット値(以下、「オフセット値206」という)を算出する。なお、オフセット値演算部28での処理の詳細は後述する。オフセット値演算部28は、オフセット値206を角速度変換部14へ出力する。
【0026】
感度係数演算部30は、有効性判定部22からのGPS測位データ200、傾斜検出部24からの傾斜角度204、角速度センサ26からの出力信号202を入力する。また、感度係数演算部30は、オフセット値演算部28からオフセット値206も入力する。感度係数演算部30は、GPS測位データ200、出力信号202、傾斜角度204、オフセット値206とをもとに、角速度センサ26の感度係数(以下、前述の「感度係数208」という)を算出する。なお、感度係数演算部30での処理の詳細は後述する。感度係数演算部30は、感度係数208を角速度変換部14へ出力する。
【0027】
角速度変換部14は、角速度センサ26からの出力信号202、オフセット値演算部28からのオフセット値206、感度係数演算部30からの感度係数208を入力する。角速度変換部14は、出力信号202、オフセット値206、感度係数208をもとに、前述の式(1)を計算することによって、車両の角速度ωを算出する。角速度変換部14は、角速度ωを出力する。制御部32は、角速度算出装置100全体の動作を制御する。
【0028】
この構成は、ハードウエア的には、任意のコンピュータのCPU、メモリ、その他のLSIで実現でき、ソフトウエア的にはメモリにロードされたプログラムなどによって実現されるが、ここではそれらの連携によって実現される機能ブロックを描いている。したがって、これらの機能ブロックがハードウエアのみ、ソフトウエアのみ、またはそれらの組合せによっていろいろな形で実現できることは、当業者には理解されるところである。
【0029】
図2は、オフセット値演算部28の構成を示す。オフセット値演算部28は、状態推定部40、状態別オフセット値導出部42、オフセット値フィルタ処理部44を含む。また、状態推定部40は、停止推定部50、直進走行推定部52、非直進走行推定部54を含み、状態別オフセット値導出部42は、停止時オフセット値導出部56、直進走行時オフセット値導出部58、非直進走行時オフセット値導出部60を含む。さらに信号として、仮オフセット値210、走行状態情報212が含まれる。
【0030】
状態推定部40は、GPS測位データ200、出力信号202、傾斜角度204を入力する。状態推定部40は、停止推定部50、直進走行推定部52、非直進走行推定部54において、車両の走行状態を推定する。ここでは、車両の走行状態として、車両が停止あるいは直進している状態であるか、残りの状態、つまり非直進走行している状態であるかを推定する。また、状態推定部40は、判定結果を走行状態情報212としてオフセット値フィルタ処理部44へ出力する。
【0031】
停止推定部50は、図示しない有効性判定部22において有効であると判定されたGPS測位データ200を取得する。また、停止推定部50は、GPS測位データ200からGPS速度を抽出し、GPS速度が「0」であるかを確認する。一方、停止推定部50は、所定期間内における出力信号202の分散値を計算し、分散値と第5のしきい値とを比較する。停止推定部50は、GPS速度が0であり、かつ分散値が第5のしきい値よりも小さい場合に、車両が停止状態であると判定する。前述のごとく、GPS速度が小さい場合、その精度は低くなる傾向があるが、停止推定部50は、出力信号202の分散値を併せて使用することによって停止と判断する。ここで、所定期間は、例えば、GPS速度のサンプリング間隔である1secとされる。所定期間において、出力信号202の分散値が小さいときは、車両の揺れ等がない安定した状態であると推定される。停止推定部50は、停止状態ではないと判定した場合、その旨を非直進走行推定部54へ出力する。
【0032】
直進走行推定部52は、図示しない有効性判定部22において有効であると判定されたGPS測位データ200を取得する。また、直進走行推定部52は、GPS測位データ200からGPS方位を抽出し、GPS方位の所定期間にわたる変化(以下、「GPS方位変化」という)を導出する。さらに、直進走行推定部52は、GPS方位変化が「0」であるかを確認する。また、直進走行推定部52は、所定期間における出力信号202の分散値を計算し、分散値と第6のしきい値とを比較する。なお、第6のしきい値は、第5のしきい値と同一であってもよい。ここで、所定期間は、例えば、GPS方位変化が連続して0であるような期間に設定される。
【0033】
直進走行推定部52は、GPS方位変化が0であり、かつ分散値が第6のしきい値よりも小さい場合に、車両が直進走行状態であると判定する。所定期間において、出力信号202の分散値が小さいときは、微妙な蛇行等の影響がない直進走行状態であると推定される。なお、ドライバの運転状況や道路形状によるが、例えば、市街地等において、直進走行状態の検出頻度は、一般的に、停止推定部50による停止状態の判定よりも少なく、その期間は数秒間程度である。直進走行推定部52は、直進走行状態ではないと判定した場合、その旨を非直進走行推定部54へ出力する。ここで、停止推定部50において停止状態と判定され、直進走行推定部52において直進走行状態であると判定された場合、停止推定部50の判定結果が優先される。非直進走行推定部54は、停止推定部50から、停止状態ではない旨を入力し、かつ直進走行推定部52から、直進走行状態ではない旨を入力した場合、車両が非直進走行状態であると判定する。
【0034】
状態別オフセット値導出部42は、GPS測位データ200、出力信号202、傾斜角度204、感度係数208を入力する。状態別オフセット値導出部42は、状態推定部40において推定した車両の走行状態に応じて、角速度センサ26の仮オフセット値210を逐次導出する。ここで、停止推定部50において停止状態と判定された場合、停止時オフセット値導出部56が出力信号202をもとに仮オフセット値210を逐次導出する。また、直進走行推定部52において直進走行状態と判定された場合、直進走行時オフセット値導出部58が出力信号202をもとに仮オフセット値210を逐次導出する。
【0035】
また、直進走行時オフセット値導出部58において非直進走行状態と判定された場合、非直進走行時オフセット値導出部60がGPS測位データ200、出力信号202、傾斜角度204、感度係数208をもとに仮オフセット値210を逐次導出する。つまり、車両の走行状態に応じて停止時オフセット値導出部56から非直進走行時オフセット値導出部60は、GPS測位データ200、出力信号202等の組合せを変更しながら、仮オフセット値210を導出する。
【0036】
停止時オフセット値導出部56は、停止状態と判定された場合に、出力信号202をもとに、角速度センサ26の仮オフセット値210を逐次導出する。具体的に説明すると、停止時オフセット値導出部56は、停止時に車両の旋回角速度が「0」になることを利用し、出力信号202の平均値を仮オフセット値210として算出する。直進走行時オフセット値導出部58は、直進走行状態と判定された場合に、出力信号202をもとに、角速度センサ26の仮オフセット値210を逐次導出する。具体的に説明すると、ここでも車両の旋回角速度が0であるので、直進走行時オフセット値導出部58は、出力信号202の平均値を仮オフセット値210として算出する。
【0037】
非直進走行時オフセット値導出部60は、非直進走行状態であると判定された場合に、GPS測位データ200中のGPS方位、傾斜角度204、出力信号202、感度係数208とをもとに、例えば、GPS方位のサンプリング間隔における仮オフセット値210を逐次導出する。ここで、仮オフセット値210は、次のように導出される。
Goffset=1/n・ΣGout−Δθ・Gsensitivity・cos(α) ・・・(4)
ここで、nは、GPS方位のサンプリング間隔における出力信号202のサンプル数であり、ΣGout(mV)は、GPS方位のサンプリング間隔における出力信号202の合計値である。また、Δθ(deg)は、GPS方位変化量であり、Gsensitivity(mV/deg/sec)は、感度係数208であり、α(deg)は、車両の傾斜角度204である。
【0038】
感度係数208は、通常、図示しない感度係数演算部30から入力されるが、角速度算出装置100の起動直後などのような状態において、感度係数208が未だ算出されていないこともありえる。そのような場合、非直進走行時オフセット値導出部60は、図示しないジャイロ装置の仕様によって決定される感度係数208を初期値として使用する。また、非直進走行時オフセット値導出部60は、前回の走行終了時に感度係数演算部30からの感度係数208を記憶しておき、初期値として使用してもよい。
【0039】
オフセット値フィルタ処理部44は、状態別オフセット値導出部42において逐次導出した仮オフセット値210を入力する。オフセット値フィルタ処理部44は、仮オフセット値210に対して統計処理を実行することによって、角速度センサ26のオフセット値206を導出する。以下では、図3を使用しながら、オフセット値フィルタ処理部44での処理を説明する。
【0040】
図3は、オフセット値フィルタ処理部44の構成を示す。オフセット値フィルタ処理部44は、αi乗算部70、加算部72、1−αi乗算部74、忘却係数設定部76を含む。図示のごとく、オフセット値フィルタ処理部44は、IIR(Infinite Impulse Responce)フィルタを含むように構成されており、IIRフィルタによってローパスフィルタを構成する。αi乗算部70は、仮オフセット値210に忘却係数「αi」を乗算する。ここで、「i」は、1あるいは2である。そのため、忘却係数「αi」は、α1、α2の総称である。なお、α1およびα2については後述する。αi乗算部70は、乗算結果を加算部72へ出力する。
【0041】
加算部72は、αi乗算部70からの乗算結果と、1−αi乗算部74からの乗算結果とを逐次加算する。加算部72は、加算結果をオフセット値206として逐次出力する。1−αi乗算部74は、オフセット値206に係数「1−αi」を乗算する。なお、係数「1−αi」のうちの「αi」は、αi乗算部70でのαiと同様であるので、ここでは説明を省略する。1−αi乗算部74は、加算部72へ乗算結果をフィードバックする。忘却係数設定部76は、走行状態情報212を入力する。また、忘却係数設定部76は、走行状態情報212にて示された状態に応じて、忘却係数「αi」の値を決定する。さらに、忘却係数設定部76は、決定した忘却係数「αi」をαi乗算部70および1−αi乗算部74へ設定する。
【0042】
図4は、忘却係数設定部76において記憶されるテーブルのデータ構造を示す。図示のごとく、走行状態欄300、忘却係数欄302が含まれる。走行状態欄300には、走行状態情報212にて示される各状態が含まれる。忘却係数欄302には、各状態に対応した忘却係数「αi」を記憶する。つまり、停止状態と直進走行状態に対して忘却係数「α1」が対応づけられ、非直進走行状態に対して忘却係数「α2」が対応づけられる。ここで、α2<α1の規定がなされる。図3に戻る。忘却係数設定部76は、図4のテーブルを参照しながら、走行状態情報212にて示された状態から忘却係数「α1」あるいは「α2」を選択する。このように、忘却係数設定部76は、車両の走行状態に応じて、フィルタ処理の際の忘却係数を変更する。
【0043】
ここでは、忘却係数を変更する理由を説明する。オフセット値フィルタ処理部44の構成より、時刻tにおけるオフセット値206Voffset(t)は、次のように示される。
Voffset(t)=αiGoffset(t)+(1−αi)Voffset(t−1) ・・・(5)
なお、Goffset(t)は、時刻tにおける仮オフセット値210である。つまり、αiが大きくなると、Voffset(t)のうちのGoffset(t)の影響が大きくなり、αiが小さくなると、Voffset(t)のうちのVoffset(t−1)の影響が多くなる。これは、前者の場合において新しい仮オフセット値210の影響が大きくなり、後者の場合において過去の仮オフセット値210の影響が大きくなることに相当する。
【0044】
例えば、停止状態あるいは直進走行状態において、仮オフセット値210は、車両の旋回角速度が0である状態の出力信号202から導出されるので、その信頼度は高い。そのため、これらの状態において順次導出されるオフセット値206に対して、非直進走行状態よりも、新たに導出された仮オフセット値210の重み付けを大きくした平均化処理がなされる。これは、過去の仮オフセット値210の影響が小さくなるような忘却係数を使用することに相当する。
【0045】
一方、非直進走行時においては、式(4)のGPS方位変化量から求められるΔθや車両の平均傾斜角度αに誤差等が含まれる可能性がある。ここで、仮オフセット値210のドリフトは温度による影響等によるものであるので、仮オフセット値210の変動にはある連続性を持った特性が存在すると推測される。そのため、その特性に適したローパスフィルタを使用することによって、式(4)から導かれたオフセット値に含まれる誤差を吸収できる。具体的には、その特性に適したローパスフィルタとは、過去の仮オフセット値210の影響が大きくなるような忘却係数を使用することに相当する。
【0046】
図5は、感度係数演算部30の構成を示す。感度係数演算部30は、感度係数導出部80、感度係数フィルタ部82、動作期間管理部84を含む。感度係数導出部80は、GPS測位データ200、出力信号202、傾斜角度204を入力する。また、感度係数演算部30は、オフセット値206も入力する。また、感度係数導出部80は、GPS測位データ200、出力信号202、傾斜角度204、オフセット値206とをもとに、角速度センサ26の仮の感度係数を逐次導出する。
【0047】
具体的に説明すると、感度係数導出部80は、GPS測位データ200においてGPS方位が有効であると示されている場合、次のように、GPS方位のサンプリング間隔における角速度センサ26の仮の感度係数を算出する。
Gsensitivity=(1/n・ΣGout−Goffset)/Δθ/cos(α) ・・・(6)
ここで、Goffsetは、図示しないオフセット値演算部28から入力されるが、角速度算出装置100の起動直後などのような状態において、オフセット値206が未だ算出されていないこともありえる。式(6)には、Δθによる除算が含まれるので、Δθが所定値以上であるときに感度係数を算出する。Δθの値が所定値以下であるときは、感度係数導出部80は、直前に補正した感度係数を出力する。
【0048】
感度係数フィルタ部82は、感度係数導出部80において逐次導出した仮の感度係数を入力する。感度係数フィルタ部82は、仮の感度係数に対して統計処理を実行することによって、角速度センサ26の感度係数208を導出する。感度係数フィルタ部82は、図4に示されたオフセット値フィルタ処理部44と同様に、IIRフィルタにて構成されており、IIRフィルタは、ローパスフィルタを構成する。その結果、式(6)におけるGPS方位変化量から求められるΔθや、車両の平均傾斜角度αに含まれる誤差が吸収される。また、感度係数フィルタ部82は、動作期間管理部84からの指示をもとに、IIRフィルタでの忘却係数を設定する。
【0049】
動作期間管理部84は、角速度センサ26の動作期間に応じて、感度係数フィルタ部82での忘却係数を変更する。また、動作期間管理部84は、変更した忘却係数の使用を感度係数フィルタ部82へ指示する。図6は、感度係数フィルタ部82において記憶されるテーブルのデータ構造を示す。図示のごとく、条件欄310、忘却係数欄312が示される。条件欄310には、忘却係数を決定するための動作期間に関する条件として、「x時間以下」、「x時間より大」が示されている。忘却係数欄312には、条件欄310での各条件に対応した忘却係数の値が示される。具体的には、「x時間以下」の場合に対して、忘却係数α10が設定されており、「x時間より大」の場合に対して、忘却係数α11が規定されている。また、α11<α10の関係が規定されている。つまり、起動からx時間以下の場合において、起動からx時間よりも大の場合よりも、新たに導出された仮オフセット値210の重み付けを大きくした平均化処理がなされる。
【0050】
また、ここでは、GPS方位のサンプリング間隔における仮の感度係数を算出する例を示したが、Goffsetおよびαの変動が微小である場合、あるいはΔθの値が所定値以上にならない場合は、算出の間隔が大きくされてもよい。つまり、仮の感度係数の導出は、GPS方位のサンプリング間隔に限定されない。
【0051】
以上の構成による角速度算出装置100の動作を説明する。図7は、角速度算出装置100によるオフセット値の導出手順を示すフローチャートである。有効性判定部22は、GPS測位部20において測位されたふたつのGPS測位データ200の有効性を判定する(S10)。ふたつのGPS測位データ200は、サンプリング間隔時間だけ離れたタイミングでのGPS測位データ200に相当する。有効でなければ(S10のN)、待機する。ともに有効であれば(S10のY)、オフセット値演算部28は、GPS測位データ200のサンプリング間隔における車両のGPS方位変化量と、角速度センサ26の出力信号202の合計値、傾斜検出部24が出力する車両の傾斜角度204、感度係数演算部30が出力する感度係数208を取得する(S12)。
【0052】
状態推定部40は、取得した各種情報をもとに、車両の走行状態が停止あるいは直進走行状態であるかを判定する(S14)。停止あるいは直進走行状態であれば(S14のY)、停止時オフセット値導出部56あるいは直進走行時オフセット値導出部58は、取得した各種情報をもとに角速度センサ26の仮オフセット値210を算出する(S16)。オフセット値フィルタ処理部44は、忘却係数α1でフィルタ処理を実行する(S18)。一方、停止あるいは直進走行状態でなければ(S14のN)、非直進走行時オフセット値導出部60は、取得した各種情報をもとに角速度センサ26の仮オフセット値210を算出する(S20)。オフセット値フィルタ処理部44は、忘却係数α2でフィルタ処理を実行する(S22)。
【0053】
図8は、角速度算出装置100による感度係数の導出手順を示すフローチャートである。有効性判定部22は、GPS測位部20において測位されたふたつのGPS測位データ200の有効性を判定する(S40)。ふたつのGPS測位データ200は、サンプリング間隔時間だけ離れたタイミングでのGPS測位データ200に相当する。有効でなければ(S40のN)、待機する。ともに有効であれば(S40のY)、感度係数演算部30は、GPS測位データ200のサンプリング間隔における車両のGPS方位変化量と、角速度センサ26の出力信号202の合計値、傾斜検出部24が出力する車両の傾斜角度204、感度係数演算部30が出力する感度係数208を取得する(S42)。
【0054】
感度係数導出部80は、取得したGPS方位変化量が所定値以上でないと判定すれば(S44のN)、ステップ40に戻る。一方、感度係数導出部80は、取得したGPS方位変化量が所定値以上であると判定すれば(S44のY)、取得した各種情報に基づいて角速度センサ26の仮の感度係数を導出する(S46)。感度係数フィルタ部82は、動作時間に応じた忘却係数にて、仮の感度係数に対してフィルタ処理を実行する(S48)。
【0055】
本発明の実施例によれば、走行状態に応じた仮オフセット値を導出するとともに、走行状態に応じた忘却係数を使用しながら仮オフセット値をフィルタ処理することによってオフセット値を導出するので、起動してから短期間であってもオフセット値に含まれる誤差を低減できる。また、オフセット値に含まれる誤差が低減されるので、オフセット値の導出精度を向上できる。また、角速度センサのオフセット値について、車両の傾斜角度を考慮するので、導出精度をさらに向上できる。また、GPS方位のサンプリング間隔といった短い時間にて、車両の走行状態に応じた最適なオフセット値を導出するので、オフセット値のドリフトに精度よく追随できる。
【0056】
また、仮の感度係数を導出するとともに、角速度センサの動作期間に応じた忘却係数を使用しながら仮の感度係数をフィルタ処理することによって感度係数を導出するので、起動してから短期間であっても感度係数に含まれる誤差を低減できる。また、感度係数に含まれる誤差が低減されるので、感度係数の導出精度を向上できる。また、走行状態として実質的にふたつの状態を規定し、仮オフセット値の2種類の導出方法およびα1およびα2の忘却係数を用意するので、処理を簡易にできる。また、角速度センサの感度係数について、車両の傾斜角度およびその変動を考慮して算出するので、傾斜のある道路の走行時においても導出精度を向上できる。また、オフセット値のドリフトに精度よく追随できるので、ナビゲーション装置の起動直後から感度係数を正確に導出できる。また、オフセット値と感度係数との導出精度が向上されるので、角速度の導出精度を向上できる。
【0057】
(実施例2)
実施例2は、実施例1と同様に角速度算出装置100に関する。実施例1においては、走行状態として、停止状態、直進走行状態、非直進走行状態への分類がなされている。また、状態別オフセット値導出部42、オフセット値フィルタ処理部44は、停止状態および直進走行状態に対して同様の処理を実行しているので、実施例1では、実質的にふたつの状態のそれぞれに対して異なった処理がなされているといえる。一方、実施例に2に係る角速度算出装置100は、停止状態に対する忘却係数と、直進走行状態に対する忘却係数とに異なった値を設定する。そのため、実施例2では、3つの状態のそれぞれに対して異なった処理がなされているといえる。実施例に2に係る角速度算出装置100、オフセット値演算部28、オフセット値フィルタ処理部44、感度係数演算部30は、それぞれ図1、図2、図3、図5と同様のタイプである。そのため、ここでは、差異を中心に説明する。
【0058】
図9は、本発明の実施例2に係る忘却係数設定部76において記憶されるテーブルのデータ構造を示す図である。図9のテーブルは、図4と同様に示されている。忘却係数欄302には、停止状態に対応した忘却係数「α1」、直進走行状態に対応した忘却係数「α2」、非直進走行状態に対応した忘却係数「α3」が示されている。ここで、α1>α2>α3となっており、停止状態、直進走行状態、非直進走行状態の順に、過去の仮オフセット値210の影響が小さくなる。忘却係数設定部76は、前述のごとく、当該デーブルを参照しながら走行状態情報212をもとに、忘却係数を選択する。また、忘却係数設定部76は、選択した忘却係数をαi乗算部70および1−αi乗算部74に設定する。
【0059】
本発明の実施例によれば、走行状態として3つの状態に対して、3つの忘却係数を用意するので、各状態に適合したフィルタ処理を実現できる。また、各状態に適合したフィルタ処理が実現されるので、処理精度を向上できる。
【0060】
以上、本発明を実施例をもとに説明した。この実施例は例示であり、それらの各構成要素や各処理プロセスの組合せにいろいろな変形例が可能なこと、またそうした変形例も本発明の範囲にあることは当業者に理解されるところである。
【0061】
本発明の実施例において、オフセット値演算部28、感度係数演算部30は、式(4)、式(6)を計算する際に、GPS測位データ200に含まれたGPS方位をもとにしたΔθを使用している。しかしながらこれに限らず例えば、オフセット値演算部28、感度係数演算部30は、図示しない地図データベースを用いて、車両がマッチングしている道路方位を利用してもよい。なお、地図データベースへの車両のマッチングには、GPS測位データ200が使用される。本変形例によれば、角速度算出装置100の構成の自由度を向上できる。
【0062】
本発明の実施例において、傾斜検出部24は、GPS高度を利用して車両の傾斜角度204を算出している。しかしながらこれに限らず例えば、傾斜検出部24が加速度センサを備え、加速度センサからの情報を利用して傾斜角度204を算出してもよい。または、傾斜検出部24は、図示しない地図データベースに含まれる道路情報に高度情報が存在する場合に、車両がマッチングしている道路の高度情報を利用してもよい。本変形例によれば、傾斜角度204を高精度に導出できる。
【0063】
本発明の実施例において、オフセット値演算部28、感度係数演算部30は、仮オフセット値210、仮の感度係数を導出する際に、傾斜角度204を使用している。しかしながらこれに限らず例えば、傾斜角度204は使用されなくてもよい。その際、式(4)、式(6)でのαは0にされる。本変形例によれば、処理を簡易にできる。
【0064】
本発明の実施例において、状態推定部40は、車両の走行状態判定として、GPS測位データ200に含まれたGPS速度を使用して、停止状態を判定している。しかしながらこれに限らず例えば、状態推定部40は、図示しないパルス検出部からの車両の車速パルス信号を入力し、車速パルスをもとに停止状態を判定してもよい。ここで、パルス検出部は、図示しない速度センサに接続されており、速度センサは、ドライブシャフトの回転に対応して回転するスピードメータケーブルの中間に設置され、ドライブシャフトの回転に伴った車速パルス信号を出力する。本変形例によれば、さまざまな手段によって車両の速度を測定できる。
【0065】
本発明の実施例において、有効性判定部22は、GPS測位データ200の有効性を判定するために、PDOPを使用している。しかしながらこれに限らず例えば、有効性判定部22は、GDOP(Geometric Dilution Of Precision)、HDOP(Horizontal Dilution Of Precision)等や、これらの組合せを使用してもよい。本変形例によれば、さまざまなパラメータを判定に使用できる。
【0066】
本発明の実施例において、オフセット値フィルタ処理部44や感度係数フィルタ部82は、IIRフィルタを含むように形成されている。しかしながらこれに限らず例えば、オフセット値フィルタ処理部44や感度係数フィルタ部82は、FIR(Finite Impulse Response)フィルタを含むように形成されていてもよい。その際、忘却係数は、タップ係数として設定される。本変形例によれば、フィルタ構成の自由度を向上できる。
【図面の簡単な説明】
【0067】
【図1】本発明の実施例1に係る角速度算出装置の構成を示す図である。
【図2】図1のオフセット値演算部の構成を示す図である。
【図3】図1のオフセット値フィルタ処理部の構成を示す図である。
【図4】図3の忘却係数設定部において記憶されるテーブルのデータ構造を示す図である。
【図5】図1の感度係数演算部の構成を示す図である。
【図6】図5の感度係数フィルタ部において記憶されるテーブルのデータ構造を示す図である。
【図7】図1の角速度算出装置によるオフセット値の導出手順を示すフローチャートである。
【図8】図1の角速度算出装置による感度係数の導出手順を示すフローチャートである。
【図9】本発明の実施例2に係る忘却係数設定部において記憶されるテーブルのデータ構造を示す図である。
【符号の説明】
【0068】
10 測定部、 12 パラメータ算出装置、 14 角速度変換部、 20 GPS測位部、 22 有効性判定部、 24 傾斜検出部、 26 角速度センサ、 28 オフセット値演算部、 30 感度係数演算部、 32 制御部、 40 状態推定部、 42 状態別オフセット値導出部、 44 オフセット値フィルタ処理部、 50 停止推定部、 52 直進走行推定部、 54 非直進走行推定部、 56 停止時オフセット値導出部、 58 直進走行時オフセット値導出部、 60 非直進走行時オフセット値導出部、 70 αi乗算部、 72 加算部、 74 1−αi乗算部、 76 忘却係数設定部、 80 感度係数導出部、 82 感度係数フィルタ部、 84 動作期間管理部、 100 角速度算出装置。
【特許請求の範囲】
【請求項1】
GPS衛星からの信号をもとに測位された対象物の測位データと、角速度センサから出力された対象物の角速度とを取得する取得部と、
前記取得部において取得した測位データと角速度とをもとに、対象物の走行状態を推定する推定部と、
前記推定部において推定した対象物の走行状態に応じて、前記取得部において取得した測位データと角速度との組合せを変更しながら、前記角速度センサの仮のオフセット値を逐次導出するオフセット値導出部と、
前記オフセット値導出部において逐次導出した前記角速度センサの仮のオフセット値に対して統計処理を実行することによって、前記角速度センサから出力された角速度を補正するための前記角速度センサのオフセット値を導出するオフセット値フィルタ処理部とを備え、
前記オフセット値フィルタ処理部は、前記推定部において推定した対象物の走行状態に応じて、統計処理の際の忘却係数を変更することを特徴とする角速度センサ補正装置。
【請求項2】
前記推定部は、対象物の走行状態として、対象物が停止あるいは直進している状態である第1状態か、他の状態である第2状態であるかを推定し、
前記オフセット値導出部は、前記推定部において第1状態であると推定された場合に、前記取得部において取得した角速度をもとに、前記角速度センサの仮のオフセット値を逐次導出し、前記推定部において第2状態であると推定された場合に、前記取得部において取得した測位データと角速度とをもとに、前記角速度センサの仮のオフセット値を逐次導出し、
前記オフセット値フィルタ処理部は、前記角速度センサのオフセット値導出における、過去に求められた仮のオフセット値の影響が、第2状態よりも第1状態で小さくなるような忘却係数を統計処理の際に使用することを特徴とする請求項1に記載の角速度センサ補正装置。
【請求項3】
前記取得部において取得した測位データには、対象物の速度が含まれており、
前記推定部は、対象物の走行状態として、対象物が停止している状態である第1状態か、対象物が直進している状態である第2状態か、その他の状態である第3状態であるかを推定し、
前記オフセット値導出部は、前記推定部において第1状態あるいは第2状態であると推定された場合に、前記取得部において取得した角速度をもとに、前記角速度センサの仮のオフセット値を逐次導出し、前記推定部において第3状態であると推定された場合に、前記取得部において取得した測位データと角速度とをもとに、前記角速度センサの仮のオフセット値を逐次導出し、
前記オフセット値フィルタ処理部は、前記角速度センサのオフセット値導出における、過去に求められた仮のオフセット値の影響が、第1状態、第2状態、第3状態の順に小さくなるような忘却係数を統計処理の際に使用することを特徴とする請求項1に記載の角速度センサ補正装置。
【請求項4】
前記取得部において取得した測位データと角速度とをもとに、前記角速度センサの仮の感度係数を逐次導出する感度係数導出部と、
前記感度係数導出部において逐次導出した前記角速度センサの仮の感度係数に対して統計処理を実行することによって、前記角速度センサから出力された角速度を補正するための前記角速度センサの感度係数を導出する感度係数フィルタ処理部とをさらに備え、
前記感度係数フィルタ処理部は、前記角速度センサの動作期間に応じて、統計処理の際の忘却係数を変更することを特徴とする請求項1から3のいずれかに記載の角速度センサ補正装置。
【請求項5】
GPS衛星からの信号をもとに測位された対象物の測位データと、角速度センサから出力された対象物の角速度とを取得するステップと、
取得した測位データと角速度とをもとに、対象物の走行状態を推定するステップと、
推定した対象物の走行状態に応じて、取得した測位データと角速度との組合せを変更しながら、前記角速度センサの仮のオフセット値を逐次導出するステップと、
逐次導出した前記角速度センサの仮のオフセット値に対して統計処理を実行することによって、前記角速度センサから出力された角速度を補正するための前記角速度センサのオフセット値を導出するステップとを備え、
前記角速度センサのオフセット値を導出するステップは、推定した対象物の走行状態に応じて、統計処理の際の忘却係数を変更することを特徴とする角速度センサ補正方法。
【請求項1】
GPS衛星からの信号をもとに測位された対象物の測位データと、角速度センサから出力された対象物の角速度とを取得する取得部と、
前記取得部において取得した測位データと角速度とをもとに、対象物の走行状態を推定する推定部と、
前記推定部において推定した対象物の走行状態に応じて、前記取得部において取得した測位データと角速度との組合せを変更しながら、前記角速度センサの仮のオフセット値を逐次導出するオフセット値導出部と、
前記オフセット値導出部において逐次導出した前記角速度センサの仮のオフセット値に対して統計処理を実行することによって、前記角速度センサから出力された角速度を補正するための前記角速度センサのオフセット値を導出するオフセット値フィルタ処理部とを備え、
前記オフセット値フィルタ処理部は、前記推定部において推定した対象物の走行状態に応じて、統計処理の際の忘却係数を変更することを特徴とする角速度センサ補正装置。
【請求項2】
前記推定部は、対象物の走行状態として、対象物が停止あるいは直進している状態である第1状態か、他の状態である第2状態であるかを推定し、
前記オフセット値導出部は、前記推定部において第1状態であると推定された場合に、前記取得部において取得した角速度をもとに、前記角速度センサの仮のオフセット値を逐次導出し、前記推定部において第2状態であると推定された場合に、前記取得部において取得した測位データと角速度とをもとに、前記角速度センサの仮のオフセット値を逐次導出し、
前記オフセット値フィルタ処理部は、前記角速度センサのオフセット値導出における、過去に求められた仮のオフセット値の影響が、第2状態よりも第1状態で小さくなるような忘却係数を統計処理の際に使用することを特徴とする請求項1に記載の角速度センサ補正装置。
【請求項3】
前記取得部において取得した測位データには、対象物の速度が含まれており、
前記推定部は、対象物の走行状態として、対象物が停止している状態である第1状態か、対象物が直進している状態である第2状態か、その他の状態である第3状態であるかを推定し、
前記オフセット値導出部は、前記推定部において第1状態あるいは第2状態であると推定された場合に、前記取得部において取得した角速度をもとに、前記角速度センサの仮のオフセット値を逐次導出し、前記推定部において第3状態であると推定された場合に、前記取得部において取得した測位データと角速度とをもとに、前記角速度センサの仮のオフセット値を逐次導出し、
前記オフセット値フィルタ処理部は、前記角速度センサのオフセット値導出における、過去に求められた仮のオフセット値の影響が、第1状態、第2状態、第3状態の順に小さくなるような忘却係数を統計処理の際に使用することを特徴とする請求項1に記載の角速度センサ補正装置。
【請求項4】
前記取得部において取得した測位データと角速度とをもとに、前記角速度センサの仮の感度係数を逐次導出する感度係数導出部と、
前記感度係数導出部において逐次導出した前記角速度センサの仮の感度係数に対して統計処理を実行することによって、前記角速度センサから出力された角速度を補正するための前記角速度センサの感度係数を導出する感度係数フィルタ処理部とをさらに備え、
前記感度係数フィルタ処理部は、前記角速度センサの動作期間に応じて、統計処理の際の忘却係数を変更することを特徴とする請求項1から3のいずれかに記載の角速度センサ補正装置。
【請求項5】
GPS衛星からの信号をもとに測位された対象物の測位データと、角速度センサから出力された対象物の角速度とを取得するステップと、
取得した測位データと角速度とをもとに、対象物の走行状態を推定するステップと、
推定した対象物の走行状態に応じて、取得した測位データと角速度との組合せを変更しながら、前記角速度センサの仮のオフセット値を逐次導出するステップと、
逐次導出した前記角速度センサの仮のオフセット値に対して統計処理を実行することによって、前記角速度センサから出力された角速度を補正するための前記角速度センサのオフセット値を導出するステップとを備え、
前記角速度センサのオフセット値を導出するステップは、推定した対象物の走行状態に応じて、統計処理の際の忘却係数を変更することを特徴とする角速度センサ補正方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2010−78567(P2010−78567A)
【公開日】平成22年4月8日(2010.4.8)
【国際特許分類】
【出願番号】特願2008−250543(P2008−250543)
【出願日】平成20年9月29日(2008.9.29)
【出願人】(000004329)日本ビクター株式会社 (3,896)
【Fターム(参考)】
【公開日】平成22年4月8日(2010.4.8)
【国際特許分類】
【出願日】平成20年9月29日(2008.9.29)
【出願人】(000004329)日本ビクター株式会社 (3,896)
【Fターム(参考)】
[ Back to top ]