
角速度センサ
【課題】 質量部を支持する弾性変形部を、正規の変形方向へ曲がりやすく、正規の変形方向以外の方向へ変形しにくい構造にして、質量部を安定して駆動できる角速度センサを提供する。
【解決手段】 検出回動部26の内部に第2の弾性変形部30a,30b,30c,30dを介して駆動質量部29aがX方向へ移動自在に支持されており、第2の弾性変形部30a,30b,30c,30dに設けられた圧電素子によって駆動質量部29aがX方向へ振動させられる。角速度センサ1が、垂直軸Z回りの角速度を持つと、駆動質量部29aにY方向のコリオリ力が作用し、検出回動部26が動作して角速度が検出される。第2の弾性変形部30a,30b,30c,30dはY方向に平行に延びる梁33,34を有しているため、Y方向の力で変形しにくい。よって、駆動質量部29aがX方向へ安定して支持される。
【解決手段】 検出回動部26の内部に第2の弾性変形部30a,30b,30c,30dを介して駆動質量部29aがX方向へ移動自在に支持されており、第2の弾性変形部30a,30b,30c,30dに設けられた圧電素子によって駆動質量部29aがX方向へ振動させられる。角速度センサ1が、垂直軸Z回りの角速度を持つと、駆動質量部29aにY方向のコリオリ力が作用し、検出回動部26が動作して角速度が検出される。第2の弾性変形部30a,30b,30c,30dはY方向に平行に延びる梁33,34を有しているため、Y方向の力で変形しにくい。よって、駆動質量部29aがX方向へ安定して支持される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、シリコン(Silicon)層を加工するなどして形成された微細な構造の角速度センサに係り、特に、質量部を安定して往復振動させることができるとともに、振動方向と直交する力による運動を正確に検知することができる角速度センサに関する。
【背景技術】
【0002】
MEMS(Micro-Electro-Mechanical Systems)素子は、2枚のシリコン(Si)ウエハがSiO2などの絶縁層を介して接合されたSOI(Silicon on Insulator)層を微細加工することで形成される。MEMS素子は、SOI層の一方のシリコンウエハが支持基板として使用され、他方のシリコンウエハが機能層として使用される。機能層は、エッチングにより分離されて、質量部と、この質量部を動作できるように支持する弾性変形部と、質量部の移動量を検知する可動電極部と固定電極部などが形成される。
【0003】
SOI層を加工する際に、SiO2などの前記絶縁層の一部が残されて、この絶縁層によって機能層の一部と支持基板とが接合されており、また質量部と弾性変形部および可動電極部などと支持基板との間の前記絶縁層が除去されて、質量部と弾性変形部および可動電極部などが、支持基板上の空間内で動作可能となる。
【0004】
以下の特許文献1と特許文献2には、角速度センサとして機能するMEMS素子が開示されている。
【0005】
特許文献1に記載された角速度センサは、基板の面と平行な向き(X方向)に移動自在に支持された一対の第1の振動体と、それぞれの第1の振動体に支持されて、基板の面に垂直な向き(Z方向)に移動自在に支持された第2の振動体が設けられている。一対の第1の振動体が前記面と平行な向き(X方向)で互いに逆位相となるように駆動されているときに、一対の第2の振動体の前記面と垂直な向き(Z方向)の振動を検知することで、Z方向のコリオリ力成分を検出でき、これにより、基板の面と平行なY軸回りの角速度、すなわちY軸と直交する面内にベクトルが向く角速度を知ることができる。
【0006】
特許文献2に記載された角速度センサであるジャイロスコープは、リング状のベースの内側にリング状のフレームが角振動できるように支持されており、このフレーム内に、角振動方向と直交する垂直方向(Z方向)へ振動できる2つの質量が設けられている。2つの前記質量をZ方向へ互いに逆向きに振動させ、コリオリ力で励起されるフレームの角振動を測定することで、前記角振動を含む面と平行なY軸周りの角速度、すなわちY軸と直交する面内にベクトルが向く角速度を知ることができる。
【特許文献1】特開2001−21360号公報
【特許文献2】特表2007−509346号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
前記特許文献1に記載された角速度センサは、一対の第1の振動体がX方向へ互いに逆位相となるように駆動され、この第1の振動体に支持されている第2の振動体がコリオリの力でZ方向へ動作させられる。ただし、前記第1の振動体を支持しているバネが単純な平板形状であり、平板形状のバネの撓み変形によって、第1の振動体がX方向へ振動自在に支持されている。そのため、コリオリ力によって第2の振動体にZ方向の移動力が与えられたときに、前記バネがX方向へ撓み変形するのみならず、Z方向へも変形しやすくなって、第1の振動体に本来のX方向への振動以外の不要な振動が重畳しやすい。
【0008】
また、前記第2の振動体を支持しているバネも平板状であるため、第2の振動体がZ方向へのコリオリ力を受けてZ方向へ動作するときに、第1の振動体へ与えられているX方向への振動によって、バネが本来の撓み方向以外の向きに変形しやすくなり、第2の振動体にコリオリ力以外の外乱の振動が重畳する心配がある。
【0009】
これは、特許文献2に記載された角速度センサにおいても同じであり、一対の質量部がZ方向へ振動駆動されているときに、質量部を支持している撓み部分がコリオリ力の影響などで本来の振動方向以外の方向へ変形し、コリオリ力を検出するためのリング状のフレームにノイズとなる振動が重畳するおそれがある。
【0010】
本発明は上記従来の課題を解決するものであり、質量部を振動自在に支持している弾性変形部を、質量部の本来の方向へ撓み変形しやすく且つそれ以外の方向へ変形しにくくして、質量部やその他の駆動部に余分なノイズ振動が重畳するのを防止しやすい角速度センサを提供することを目的としている。
【課題を解決するための手段】
【0011】
本発明は、質量部と、前記質量部を第1の方向へ往復移動自在に支持する弾性変形部と、前記質量部を前記第1の方向へ往復振動させる駆動部材と、質量部が角速度を持って運動したときに前記第1の方向と直交する第2の方向に作用する力を検出する検出部とを有する角速度センサにおいて、
前記弾性変形部は、支持部に固定される基端連結部と、前記質量部に連結される先端連結部と、前記先端連結部と前記基端連結部との間で前記第2の方向に沿って平行に延びる少なくとも2つの梁とを有しており、
前記駆動部材によって前記質量部が前記第1の方向へ往復振動させられるときに、それぞれの前記梁が前記質量部の振動方向に向けて曲げ変形することを特徴とするものである。
【0012】
本発明の角速度センサに設けられた弾性変形部は、平行な2本の梁または3本以上の梁を有しており、これら梁が質量部の駆動方向である第1の方向へ向けて撓み変形する。前記梁はコリオリ力の検出方向である第2の方向へ延びているため、弾性変形部がコリオリ力の力の影響を受けにくくなり、検出部に本来の検出方向の振動以外の振動ノイズが重畳しにくくなる。
【0013】
本発明は、前記基端連結部と前記先端連結部との間に、隣り合う梁どうしを連結する連結梁が設けられていることが好ましい。
【0014】
上記連結梁が設けられていると、隣り合う梁が互いの間隔を保って撓み変形するため、梁の変形が安定し、弾性変形部に捩じり変形などが生じにくくなる。
【0015】
本発明は、前記駆動部材が、少なくとも1つの梁に設けられた圧電素子であり、この圧電素子の電歪効果によって複数の梁が曲げ変形させられて、前記質量部が往復振動させられるものである。
【0016】
圧電素子を用いて梁に直接に振動駆動力を与えることで、質量部を効率よく振動させることができる。なお、本発明は弾性変形部とは別個に駆動電極を設け、質量部に設けられた電極と支持部に設けられた電極との間の静電力によって質量部が駆動されるものであってもよい。
【0017】
本発明は、前記質量部に対し前記第2の方向へ作用する力によって前記支持部が移動させられ、前記支持部の移動が前記検出部で検出されるものである。
【0018】
例えば、本発明は、前記支持部に対して2つの前記質量部が前記弾性変形部を介して支持されているとともに、前記駆動部材によって2つの前記質量部が互いに逆の位相で振動駆動され、前記質量部に対し前記第2の方向へ作用する力によって、前記支持部が回動し、前記検出部で前記支持部の回動が検出されるものである。
【0019】
本発明は、2つのSi層が絶縁層を介して接合されたSOI層が使用され、一方のSi層が前記支持基板として使用され、他方のSi層が機能層として使用されて、前記機能層から、前記質量部および前記弾性変形部が形成されており、前記質量部と前記支持基板との間および前記弾性変形部と前記支持基板との間で、前記絶縁層が除去されているものが好ましい。
【0020】
SOI層の一方のシリコンウエハから各動作部分を形成することで、薄型で小型の角速度センサを得ることができる。
【発明の効果】
【0021】
本発明の角速度センサは、質量部を支持している弾性変形部に複数の梁が設けられているため、この梁の撓みで質量部を安定して振動させることが可能である。また梁が検出方向である第2の方向へ延びているため、質量部に作用するコリオリ力によって梁にたわみが生じにくい。そのために、弾性変形部に対して質量部を駆動する振動以外の振動が重畳しにくくなり、検出出力にノイズが加わりにくくなる。
【発明を実施するための最良の形態】
【0022】
図1は本発明の実施の形態の角速度センサの機能層の構造を示す平面図、図2は図1に示す角速度センサをII−II線で切断した断面図である。図3(A)は機能層に設けられた検出回動部と駆動質量部を部分的に示す平面図、図3(B)は図3(A)のB−B線の断面図である。図4ないし図6は、第2の弾性変形部および面内駆動部材を実施の形態別に示す部分平面図である。図7(A)(B)は、角速度センサの動作説明図である。
【0023】
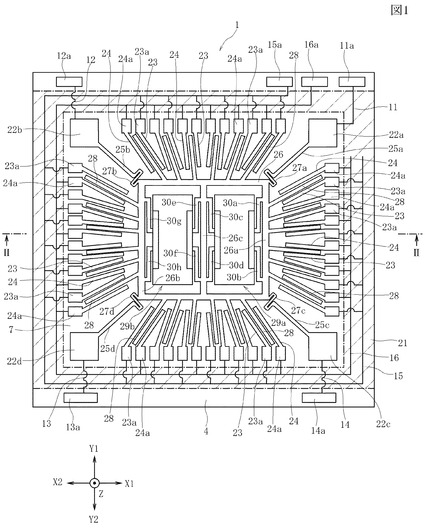
図1と図2に示す角速度センサ1はMEMS(Micro-Electro-Mechanical Systems)素子であり、図1に示すようにその平面形状は四角形である。
【0024】
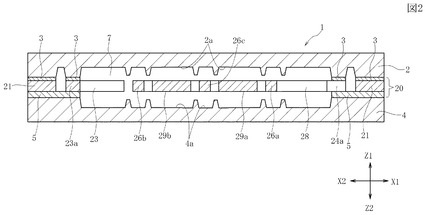
図2に示すように、角速度センサ1は、支持基板2に機能層20が積層され、機能層20の一部分と支持基板2とが第1の絶縁層3を介して接合されている。支持基板2と機能層20および第1の絶縁層3は、SOI(Silicon on Insulator)層を微細加工して形成されている。ここで使用するSOI層は、2つのシリコンウエハが、絶縁層(Insulator)であるSiO2層を挟んで一体に接合されたものである。SOI層の一方のシリコンウエハが、支持基板2として使用され、他方のシリコンウエハが機能層20として使用されて、この機能層20が微細加工されてそれぞれの機能部が分離されて形成される。また、SiO2層の一部が残されて第1の絶縁層3となる。
【0025】
図2に示すように、機能層20には閉鎖部材4が重ねられて、機能層20は支持基板2と閉鎖部材4との間で挟まれた構造となっている。閉鎖部材4は単独のSi基板である。閉鎖部材4は、機能層20との対向面に第2の絶縁層5が形成されている。
【0026】
前記第2の絶縁層5の内部に導電体のパターンが埋設されてリード層が形成されている。また、前記第2の絶縁層5の表面と、機能層20のうちのそれぞれの通電部とが金属接合層を介して導通しており、それぞれの金属接合層が、第2の絶縁層5内に埋設されているリード層と導通している。
【0027】
図1には、第2の絶縁層5の内部に配線されているリード層が実線で示されている。第2の弾性変形部30a,30b,30c,30d,30e,30f,30g,30hに設けられた面内駆動部材の圧電素子が1相駆動である場合には、圧電素子の一方の電極層に通電する1つの駆動リード層11が設けられて、駆動リード層11が駆動電極パッド11aに接続される。前記圧電素子が2相駆動である場合は、前記駆動リード層11に加えて他の駆動リード層12によって圧電素子の電極層に通電され、前記駆動リード層12が駆動電極パッド12aに接続される。圧電素子の他方の電極層は、接地リード層13を介して接地電極パッド13aに導通されている。
【0028】
この実施の形態ではコリオリ力を検出する検出部が可動電極28部と第1の固定電極部23および第2の固定電極部24で構成されている。検出部では、可動電極部28と第1の固定電極部23との間の静電容量の変化、および可動電極部28と第2の固定電極部24との間の静電容量の変化が検出される。可動電極部28には所定の電位を間欠的に供給する通電リード層14が導通しており、この通電リード層14は通電電極パッド14aに接続されている。複数設けられているそれぞれの第1の固定電極部23は第1の検出リード層15に導通しており、第1の検出リード層15は第1の検出電極パッド15aに接続されている。同じく複数設けられている第2の固定電極部24は第2の検出リード層16に導通し、第2の検出リード層16は第2の検出電極パッド16aに接続されている。
【0029】
図1に示すY方向の両側では、閉鎖部材4が、支持基板2よりも突出しており、閉鎖部材4の突出部分において、第2の絶縁層5の表面に、前記電極パッド11a,12a,13a,14a,15a,16aが形成されて、外部回路との接続が可能となっている。
【0030】
なお、閉鎖部材4は、Siの単独の基板に限られるものではなく、ガラス基板などであってもよい。あるいは駆動回路や検出回路などの各種回路が収納されたICパッケージの表面が閉鎖部材4として使用され、ICパッケージの表面の絶縁層が第2の絶縁層5の代わりに使用されて、その上に機能層20および支持基板2が順に積層されて接合されているものであってもよい。この場合、前記各リード層11,12,13,14,15,16は、ICパッケージの上面に設けられた電極バンプなどに接続されて、ICパッケージの内部回路に接続される。
【0031】
図1と図2に示すように、機能層20では、シリコンウエハの一部が分離されて枠体層21が形成されている。図1には枠体層21が形成されている領域がハッチングを付して示されている。四角枠形状の枠体層21は角速度センサ1の周囲において額縁状に形成されている。枠体層21と支持基板2はSOI層のSiO2層の一部が残された第1の絶縁層3を介して接合され、枠体層21と第2の絶縁層5とが金属接合層を介して接合されて、枠体層21で囲まれた動作空間7が外気から遮断されている。
【0032】
動作空間7内には、機能層20のシリコンウエハから分離された固定支持部22a,22b,22c,22d、検出回動部26、第1の弾性変形部25a,25b,25c,25d、駆動質量部29a,29b、第2の弾性変形部30a,30b,30c,30d,30e,30f,30g,30h、可動電極部28、第1の固定電極部23および第2の固定電極部24が形成されている。図2に示すように、これら各部は同じシリコンウエハから分離されて形成されているため、Z方向の厚さ寸法が同じである。
【0033】
4個の固定支持部22a,22b,22c,22dは、枠体層21の内側の四隅のそれぞれに設けられている。固定支持部22a,22b,22c,22dの一方の面は、SOI層のSiO2層の一部が残された第1の絶縁層3を介して支持基板2に接合されており、固定支持部22a,22b,22c,22dの他方の面は、前記接合金属層を介して第2の絶縁層5に固定されている。固定支持部22a,22b,22c,22dを接合している接合金属層は、それぞれのリード層11,12,13,14に導通している。
【0034】
枠体層21のそれぞれの内辺の内側には、第1の電極固定部23aと第2の電極固定部24aとが交互に配置されている。第1の電極固定部23aと第2の電極固定部24aは、枠体層21のそれぞれの内辺の内側に沿って一列に配列されている。各内辺の内側において、反時計方向へ向かって、第1の電極固定部23aの次に第2の電極固定部24aが位置するように交互に配列されている。
【0035】
それぞれの第1の電極固定部23aは、その一方の面がSOI層のSiO2層の一部が残された第1の絶縁層3を介して支持基板2に接合されている。それぞれの第1の電極固定部23aの他方の面は、金属接合層を介して第2の絶縁層5に接合されており、それぞれの金属接合層は前記第1の検出リード層15に導通している。それぞれの第2の電極固定部24aは、その一方の面がSOI層のSiO2層の一部が残された第1の絶縁層3を介して支持基板2に接合されている。それぞれの第2の電極固定部24aの他方の面は、金属接合層を介して第2の絶縁層5に接合されており、それぞれの金属接合層は前記第2の検出リード層16に導通している。
【0036】
動作空間7内において機能層20から分離されて形成された各機能部のうちの前記固定支持部22a,22b,22c,22dと第1の電極固定部23aおよび第2の電極固定部24a以外の部分は、支持基板2および閉鎖部材4の双方に固定されていない。図2に示すように、動作空間7内では、支持基板2の内面に、機能層20の前記各部分に対向する凹部2aが形成されている。同様に閉鎖部材4の内面にも前記各部分に対向する部分に凹部4aが形成されている。
【0037】
機能層20では、前記固定支持部22aから第1の弾性変形部25aが延びており、同様に、固定支持部22b,22c,22dから第1の弾性変形部25b,25c,25dがそれぞれ延びている。第1の弾性変形部25a,25b,25c,25dは、動作空間7の中心に向かって放射状に延びている。動作空間7の中心部には四角い枠状の検出回動部26が設けられている。第1の弾性変形部25aは、リンク支点部27aを介して、検出回動部26の右上の角部に連結されている。同様に、第1の弾性変形部25b,25c,25dは、それぞれリンク支点部27b,27c,27dを介して検出回動部26の角部に連結されている。
【0038】
第1の弾性変形部25a,25b,25c,25dが曲げ変形し、且つリンク支点部27a,27b,27c,27dが変形することで、検出回動部26は、支持基板2の面と平行な面内で時計方向および反時計方向へ回動することが可能である。
【0039】
検出回動部26の4つの外辺には、外側へ延びる複数の可動電極部28が一体に形成されている。それぞれの可動電極部28は、検出回動部26の中心(図11の平面図での図心)から離れるにしたがって間隔が広がるように放射状に形成されている。
【0040】
複数の前記第1の電極固定部23aには、検出回動部26の中心に向けて放射状に延びる第1の固定電極部23が一体に形成されており、複数の前記第2の電極固定部24aには、検出回動部26の中心に向けて放射状に延びる第2の固定電極部24が一体に形成されている。それぞれの可動電極部28は、第1の固定電極部23と第2の固定電極部24との間に挟まれている。全ての第1の固定電極部23は、可動電極部28に対して時計方向に対向しており、全ての第2の固定電極部24は、可動電極部28に対して反時計方向に対向している。
【0041】
検出回動部26が時計方向へ回動すると、それぞれの可動電極部28と第1の固定電極部23との対向間隔が狭くなって、可動電極部28と第1の固定電極部23との間の静電容量が大きくなる。逆に可動電極部28と第2の固定電極部24との間の間隔が広くなって静電容量が低下する。検出回動部26が反時計方向へ回動すると、可動電極部28と第1の固定電極部23との間の静電容量が低下し、可動電極部28と第2の固定電極部24との間の静電容量が大きくなる。第1の固定電極部23から得られる静電容量の変化による検出出力と、第2の固定電極部24から得られる静電容量の変化による検出出力との差を求めることで、検出回動部26の時計方向および反時計方向への回動量を検出することが可能である。
【0042】
また、検出回動部26が、回動方向以外の方向であるX方向やY方向へ直線的に移動し、または支持基板2の面と垂直な方向であるZ方向へ動いたときは、1つの可動電極部28と第1の固定電極部23との対向面積の変化と、前記可動電極部28と第2の固定電極部24との対向面積の変化とが同じになり、第1の固定電極部23からの検出出力と第2の固定電極部24からの検出出力との差を求めることで、検出出力が相殺される。したがって、検出回動部26の本来の検出方向である回動方向以外の動作による外乱ノイズが検出出力に重畳することがない。
【0043】
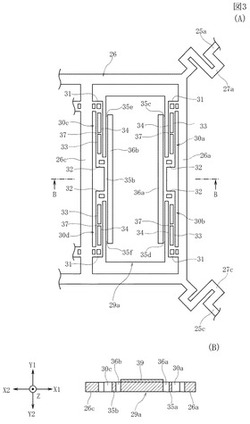
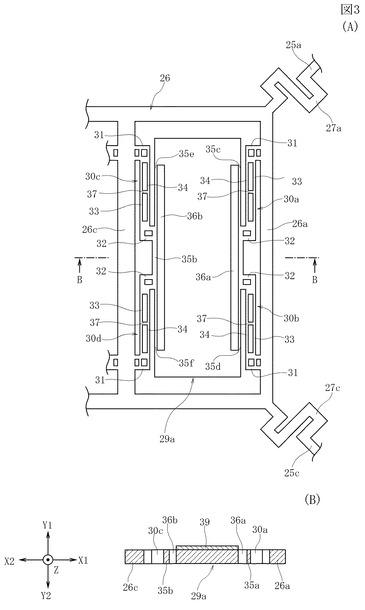
検出回動部26は、図示右側でY方向に延びる右側支持部26aと、図示左側でY方向に延びる左側支持部26bと、左右の両支持部26a,26bの中間においてY方向に延びる中間支持部26cとを有している。
【0044】
右側支持部26aと中間支持部26cとの間に、第1の駆動質量部29aが設けられ、左側支持部26bと中間支持部26cとの間に、第2の駆動質量部29bが設けられている。すなわち、検出回動部26は一対の駆動質量部29a,29bを支持する支持部として機能している。
【0045】
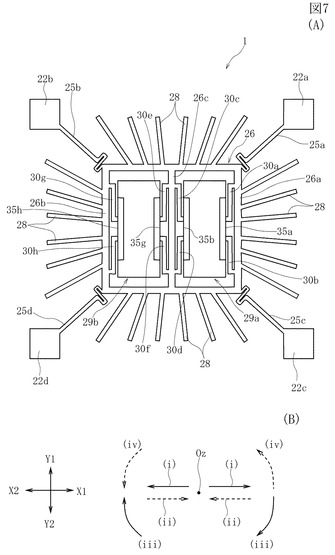
図7にも示すように、第1の駆動質量部29aの右側部はY方向に間隔を空けて設けられた2つの第2の弾性変形部30a,30bを介して右側支持部26aに支持されているとともに、左側部はY方向に間隔を空けて設けられた2つの第2の弾性変形部30c,30dを介して中間支持部26cに支持されている。第2の駆動質量部29bの右側部はY方向に間隔を空けて設けられた2つの第2の弾性変形部30e,30fを介して中間支持部26cに支持されているとともに、左側部はY方向に間隔を空けて設けられた2つの第2の弾性変形部30g,30hを介して左側支持部26bに支持されている。
【0046】
左右の合計4箇所で第2の弾性変形部30a,30b,30c,30dで支持された第1の駆動質量部29aは、検出回動部26の内部において、支持基板2の面と平行なX方向(第1の方向)へ往復移動自在である。同様に、左右の合計4箇所で第2の弾性変形部30e,30f,30g,30hで支持された第2の駆動質量部29bも、検出回動部26の内部において、支持基板2の面と平行なX方向(第1の方向)へ往復移動自在である。
【0047】
図3は、第1の駆動質量部29aが4個の第2の弾性変形部30a,30b,30c,30dで支持されている状態を示す部分拡大図である。
【0048】
図3(A)に示すように、第1の駆動質量部29aは長辺がY方向に向けられた長方形状である。第1の駆動質量部29aの右側部にはZ方向に貫通してY方向に長い長穴36aが形成されているとともに、この長穴36aの右側に連結弾性変形部35aが一体に形成されている。連結弾性変形部35aは、Y側の両端部35c,35dが第1の駆動質量部29aと一体化されており、両端部35c,35dを支点としてX方向へ湾曲変形可能である。第1の駆動質量部29aの左側部には長穴36bを介して連結弾性変形部35bが一体に形成されている。連結弾性変形部35bは、Y方向の両端部35e,35fを介して第1の駆動質量部29aに一体に連結されているとともに、両端部35e,35fを支点としてX方向へ湾曲変形可能である。
【0049】
第2の弾性変形部30a,30bは、検出回動部26の右側支持部26aと連結弾性変形部35aとを連結している。第2の弾性変形部30aと第2の弾性変形部30bは、X方向に延びる線を挟んで線対称形状である。第2の弾性変形部30c,30dは、検出回動部26の中間支持部26cと連結弾性変形部35aとを連結している。第2の弾性変形部30cと第2の弾性変形部30dは、X方向に延びる線を挟んで線対称形状である。また、第2の弾性変形部30aと第2の弾性変形部30cとがY方向に延びる線を挟んで線対称形状であり、第2の弾性変形部30bと第2の弾性変形部30dもY方向に延びる線を挟んで線対称形状である。
【0050】
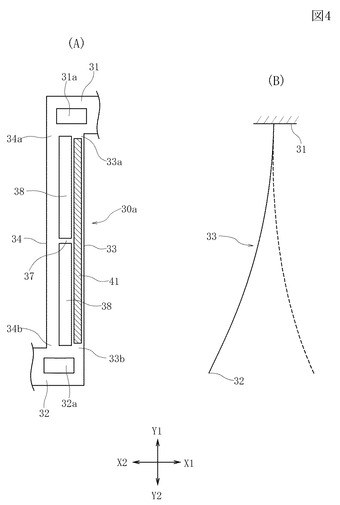
図4(A)に、第2の弾性変形部30aが拡大されて示されている。第2の弾性変形部30aの基端連結部31は、検出回動部26の右側支持部26aに一体に連結されており、基端連結部31には質量を低減させるための穴31aがZ方向に貫通して形成されている。第2の弾性変形部30aの先端連結部32は連結弾性変形部35aに一体に連結されており、先端連結部32には質量を低減させるための穴32aがZ方向に貫通して形成されている。
【0051】
基端連結部31と先端連結部32との間には、第1の梁33と第2の梁34とが設けられている。第1の梁33のY1側の端部33aは基端連結部31に一体に連結され、Y2側の端部33bは先端連結部32に一体に連結されている。同様に、第2の梁34のY1側の端部34aは基端連結部31に一体に連結され、Y2側の端部34bは先端連結部32に一体に連結されている。
【0052】
第1の梁33と第2の梁34は、Z方向に貫通する空間部38を挟んで互いに平行に形成され、共にY方向(第2の方向)へ直線的に延びている。そして、空間部38をY方向に二分する中央部において、第1の梁33と第2の梁34を連結する連結梁37が一体に形成されている。第1の梁33は、端部33aから端部33bまで幅寸法および断面積が均一であり、第2の梁34も、端部34aから端部34bまで幅寸法および断面積が均一である。
【0053】
第1の梁33と第2の梁34は、幅寸法および断面積が同一であってもよいし、異なっていてもよい。図4(A)に示すように、第1の梁33には面内駆動部材41が取り付けられ、第1の梁33に変形力が与えられるため、第1の梁33の幅寸法および断面積が第2の梁34よりも大きいことが好ましい。
【0054】
面内駆動部材41は、圧電素子であり、第1の梁33のZ方向に向く上面と下面の双方に設けられている。第1の梁33はシリコンウエハから分離されたものであって導電性である。よって、第1の梁33の上面と下面に絶縁層が形成され、この絶縁層の上に下部電極層と圧電素子層と上部電極層とが順に積層されて前記面内駆動部材41が形成されている。
【0055】
上部電極層と下部電極層との間に、交流電圧を印加すると、第1の梁33の上下両面に設けられた面内駆動部材41が一緒に伸びまた一緒に縮み、その結果、図4(B)に示すように、第1の梁33は基端連結部31が支持端となって、先端連結部32がX1−X2方向(第1の方向)へ移動するように曲げ変形振動を生じる。
【0056】
第1の駆動質量部29aを支持している他の第2の弾性変形部30b,30c,30dは、図4(A)に示す第2の弾性変形部30aとは向きが相違し、または対称形状であるが、その構造は実質的に同じである。すなわち、第2の弾性変形部30b,30c,30dも、第1の駆動質量部29aから離れる側に第1の梁33が設けられ、第1の駆動質量部29aに接近する側に第2の梁34が設けられている。そして、第1の梁33の上下両面に面内駆動部材41が設けられている。
【0057】
なお、前記面内駆動部材41は、第1の梁33の上面と下面のいずれか一方の面のみに設けられていてもよい。これは以下の他の実施の形態においても同じである。
【0058】
図7(A)に示すように、左側の第2の駆動質量部29bの右側部には連結弾性変形部35gが形成され、左側部に連結弾性変形部35hが形成されている。連結弾性変形部35g,35hの構造は、第1の駆動質量部29aに設けられた連結弾性変形部35a,35bと同じである。第2の弾性変形部30e,30fは、中間支持部26cと連結弾性変形部35gとを連結しており、第2の弾性変形部30g,30hは、左側支持部26bと連結弾性変形部35hとを連結している。
【0059】
第2の駆動質量部29bを4箇所で支持している第2の弾性変形部30e,30f,30g,30hは、図4(A)に示す第2の弾性変形部30a,30b,30c,30dと構造が実質的に同じであり、それぞれが、第2の駆動質量部29bから離れる側に第1の梁33を有し、第2の駆動質量部29bに接近する側に第2の梁34が設けられ、第1の梁33の上下両面に面内駆動部材41が設けられている。
【0060】
枠状の検出回動部26と第1の弾性変形部25aおよび固定支持部22aのそれぞれの下面には絶縁層を介してリードパターンが形成されている。合計8箇所に設けられた第2の弾性変形部30aないし30hの第1の梁33に設けられた面内駆動手段41の一方の電極層が、前記リードパターンに接続されている。さらに、前記リードパターンは、駆動リード層11を介して駆動電極パッド11aに接合されている。
【0061】
枠状の検出回動部26と第1の弾性変形部25aおよび固定支持部22aのそれぞれの下面には、絶縁層を介してさらに他のリードパターンが形成されている。合計8箇所に設けられた面内駆動手段41の他方の電極層は、前記リードパターンに接続されている。さらに、前記リードパターンは、接地リード層13を介して接地電極パッド13aに導通されている。
【0062】
第2の弾性変形部30a,30b,30g,30hに設けられた面内駆動部材41がY方向へ伸び変形するときに、弾性変形部30c,30d,30e,30fに設けられた面内駆動部材41がY方向に縮み変化し、逆に、第2の弾性変形部30a,30b,30g,30hに設けられた面内駆動部材41がY方向へ縮み変形するときに、弾性変形部30c,30d,30e,30fに設けられた面内駆動部材41がY方向に延び変形するように、それぞれの面内駆動部材41の分極方向が設定され、または上下の電極層の駆動リード層11と接地リード層13への接続状態が選択されている。よって、右側の第1の駆動質量部29aがX1方向へ駆動されたときに第2の駆動質量部29bがX2方向へ駆動され、右側の第1の駆動質量部29aがX2方向へ駆動されたときに第2の駆動質量部29bがX1方向へ駆動されるように、第1の駆動質量部29aと第2の駆動質量部29bが、X方向へ互いに逆の位相で振動するように駆動される。
【0063】
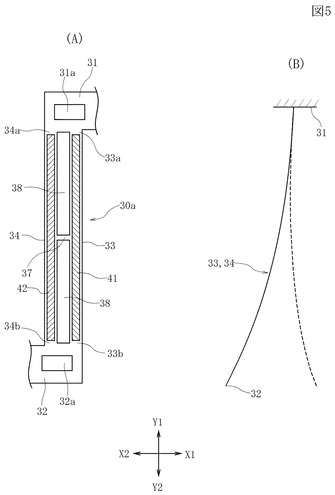
図5と図6は、前記第1の梁33に取り付けられる面内駆動部材の他の例を示している。
【0064】
図5(A)に示す実施の形態では、第1の弾性変形部の第1の梁33の上下両面に面内駆動部材41が、第2の梁34の上下両面に面内駆動部材42が設けられている。これら面内駆動部材41,42は、いずれも第1の梁33と第2の梁34の上下面に絶縁層を形成し、その表面に下部電極層と圧電素子層および上部電極層を順に重ねて積層することで形成されている。
【0065】
第1の梁33に設けられた面内駆動部材41がY方向に伸びるときに、第2の梁34に設けられた面内駆動部材42がY方向へ縮むように、面内駆動部材41,42を構成する圧電素子層の分極方向や上下の電極層の駆動リード層11と接地リード層13への接続状態が選択されている。その結果、図5(B)に示すように、基端連結部31を支持端として、先端連結部32がX1−X2方向へ触れるように曲げ変形振動する。
【0066】
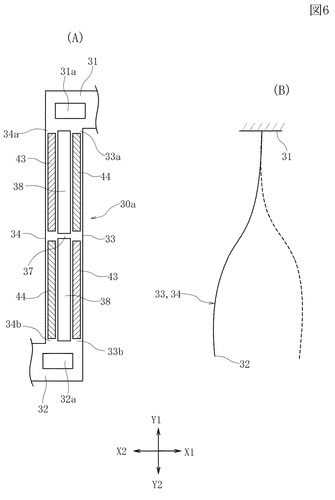
図6(A)に示す実施の形態では、第1の梁33の連結梁37よりもY2側の上下面と、第2の梁34の連結梁37よりもY1側の上下面に、同じ面内駆動部材43が設けられており、第2の梁34の連結梁37よりもY1側の上下面と、第2の梁34の連結梁37よりもY2側の上下面に、同じ面内駆動部材44が設けられている。面内駆動部材43,44は、いずれも第1の梁33と第2の梁34の上下面に絶縁層を形成し、その表面に下部電極層と圧電素子層および上部電極層を順に重ねて積層することで形成されている。
【0067】
2つの面内駆動部材43,43がY方向に伸びるときに、2つの面内駆動部材44,44がY方向へ縮み、面内駆動部材43,43がY方向に縮むときに、2つの面内駆動部材44,44がY方向へ伸びるように、面内駆動部材43,44を構成する圧電素子層の分極方向や上下の電極層の駆動リード層11と接地リード層13への接続状態が選択されている。その結果、図6(B)に示すように、基端連結部31を支持端として、先端連結部32がX1−X2方向へ触れるように、第1の梁33と第2の梁34の双方がS字状に曲げ変形振動する。このとき、先端連結部32が、X−Y平面内であまり回動することなくX1−X2方向へ振動するため、第2の弾性変形部30aないし30hと、連結弾性変形部35a,35b,35g,35hとの連結部に捩じり応力が作用しにくくなる。
【0068】
図5または図6に示すように、1つの第2の弾性変形部に2種類の面内駆動部材が設けられ、2種類の面内駆動部材を別々に駆動する必要が有る場合、それぞれの面内駆動部材の一方の電極層は、接地リード層13に接続されるが、他方の電極層は、駆動リード層11と駆動リード層12に別々に接続される。
【0069】
図4ないし図6に示すように、第2の弾性変形部30aないし30hは、基端連結部31と先端連結部32との間に、2つの梁33,34が互いに平行に設けられたいわゆるラーメン構造であるため、2つの梁33,34がX−Y平面内でX1方向とX2方向へ撓む際に、2つの梁33,34がX−Y平面と平行に動きやすく、X−Y平面に対して捻れ方向に変形しにくい。また、基端連結部31と先端連結部32が、図4(A)に示す変形前の平行状態を保ったまま、先端連結部32がX1−X2方向へ移動するので、先端連結部32と連結弾性変形部35aとの連結部にX−Y平面内での捩じりが生じにくい。また、この連結部で若干の捻れが生じても、この捩れは、連結弾性変形部35aの撓み変形で吸収される。
【0070】
また、第2の弾性変形部30aないし30hは、図4ないし図6に示すように、第1の梁33と第2の梁34の中間点が連結梁37で連結されているため、第1の梁33と第2の梁34が、X方向の間隔を保ったまま変形できるようになる。よって、面内駆動部材41ないし44で発せられる駆動力が、第1の駆動質量部29aと第2の駆動質量部29bに対して、損失があまり無い状態で伝達される。
【0071】
第1の駆動質量部29aと第2の駆動質量部29bは、機能層20であるシリコンウエハから分離されて形成されている。そこで、図3(B)に示すように、第1の駆動質量部29aと第2の駆動質量部29bの上に、シリコンよりも比重の大きい錘層39が形成されている。錘層39は、Mo、Hf、Ta、W、Ru、Rh、Pd、Ag、Re、Os、Ir、Pt、Auなどのいずれかまたはこれらの合金で形成される。
【0072】
次に、前記角速度センサ1の動作を説明する。
図1に示す接地電極パッド13aを接地電位とし、駆動電極パッド11aに交流の駆動電圧を与え、または駆動電極パッド11aと駆動電極パッド12aに交流の駆動電圧を与えると、それぞれの第2の弾性変形部30aないし30hに設けられた面内駆動部材41(図4参照)または面内駆動部材41,42(図5参照)あるいは面内駆動部材43,44(図6参照)が、駆動される。このときの駆動力で、第1の駆動質量部29aと第2の駆動質量部29bが、支持基板2の面と平行なX−Y平面内においてX1−X2方向(第1の方向)へ駆動される。図7(B)において矢印(i)(ii)で示すように、第1の駆動質量部29aがX1方向へ駆動されるときに第2の駆動質量部29bがX2方向へ駆動され、第1の駆動質量部29aがX2方向へ駆動されるときに第2の駆動質量部29bがX1方向へ駆動される。このように、第1の駆動質量部29aと第2の駆動質量部29bは、位相が逆となるように振動駆動される。
【0073】
駆動中の角速度センサ1が角速度を有して運動し、その角速度のベクトルがX−Y平面内に位置しているとき、すなわち、角速度センサ1が、X−Y平面に垂直なOz軸回りの角速度を有して運動しているとき、第1の駆動質量部29aと第2の駆動質量部29bに対して、その駆動時の速度ベクトルと直交する向き(Y1−Y2方向:第2の方向)のコリオリの力が作用する。第1の駆動質量部29aと第2の駆動質量部29bが互いに逆向きの速度ベクトルを有して運動するため、第1の駆動質量部29aと第2の駆動質量部29bに対してY1−Y2方向への互いに逆向きのコリオリ力が作用する。
【0074】
第1の駆動質量部29aと第2の駆動質量部29bに作用するコリオリ力は、第2の弾性変形部30aないし30hを介して検出回動部26に作用する。第1の駆動質量部29aに作用するコリオリ力と、第2の駆動質量部29bに作用するコリオリ力は、Y方向において互いに逆向きである。そのため、検出回動部26に偶力が作用し、検出回動部26が、図7(B)において(iii)(iv)で示すように、垂直軸Oz回りに回動振動を生じる。この回動振動により、それぞれの可動電極部28と第1の固定電極部23との対向距離および静電容量が変化し、可動電極部28と第2の固定電極部24との対向距離および静電容量が変化する。
【0075】
図1に示す通電電極パッド14aには、パルス状の電圧が与えられ、この電圧は、通電シード層14からシリコンの固定支持部22cに与えられる。パルス状の電圧は、第1の弾性変形部25cを通じて、シリコン製の検出回動部26に与えられ、さらに可動電極部28に与えられる。電圧のパルスの立ち上がり時に第1の固定電極部23に短時間に流れる電流の電流値は、可動電極部28と第1の固定電極部23との間の静電容量の変化に応じて変動し、これは第2の固定電極部24に流れる電流においても同じである。第1の固定電極部23の検知出力と第2の固定電極部24の検知出力との差を求めることで、検出回動部26の回動時の振幅を検知でき、これにより角速度を換算することが可能になる。
【0076】
第2の弾性変形部30aないし30hは、図4ないし図6に示すいわゆるラーメン構造であり、Y方向の剛性が高い。そのため、第1の駆動質量部29aと第2の駆動質量部29bにY1−Y2方向のコリオリ力が作用したときに、第2の弾性変形部30aないし30hが座屈することなく、その力が検出回動部26に与えられる。よって、第1の駆動質量部29aと第2の駆動質量部29bおよび検出回動部26が一体となって(iii)(iv)方向へ回動できるようになる。
【図面の簡単な説明】
【0077】
【図1】本発明の実施の形態の角速度センサの全体構造を示す平面図、
【図2】図1に示す角速度センサをII−II線で切断した断面図、
【図3】(A)は、検出回動部における駆動質量部の支持構造を拡大して示す平面図、(B)は(A)をB−B線で切断した断面図、
【図4】(A)は、第2の弾性変形部と面内駆動手段を拡大して示す平面図、(B)は前記第2の弾性変形部の変形動作を示す説明図、
【図5】(A)は、他の実施の形態の第2の弾性変形部と面内駆動手段を拡大して示す平面図、(B)は前記第2の弾性変形部の変形動作を示す説明図、
【図6】(A)は、さらに他の実施の形態の第2の弾性変形部と面内駆動手段を拡大して示す平面図、(B)は前記第2の弾性変形部の変形動作を示す説明図、
【図7】(A)は駆動質量部と検出回動部および可動電極部を示す平面図、(B)は動作説明図、
【符号の説明】
【0078】
1 角速度センサ
2 支持基板
3 第1の絶縁層
4 閉鎖部材
5 第2の絶縁層
7 動作空間
11,12,13,14,15,16 リード層
11a,12a,13a,14a,15a,16a 電極パッド
20 機能層
22a,22b,22c,22d 固定支持部
23 第1の固定電極部
24 第2の固定電極部
25a,25b,25c,25d 第1の弾性変形部
26 検出回動部(支持部)
28 可動電極部
29a 第1の駆動質量部
29b 第2の駆動質量部
30a,30b,30c,30d,30e,30f,30g,30h 第2の弾性変形部
31 基端連結部
32 先端連結部
33 第1の梁
34 第2の梁
41,42,43,44 面内駆動部材
【技術分野】
【0001】
本発明は、シリコン(Silicon)層を加工するなどして形成された微細な構造の角速度センサに係り、特に、質量部を安定して往復振動させることができるとともに、振動方向と直交する力による運動を正確に検知することができる角速度センサに関する。
【背景技術】
【0002】
MEMS(Micro-Electro-Mechanical Systems)素子は、2枚のシリコン(Si)ウエハがSiO2などの絶縁層を介して接合されたSOI(Silicon on Insulator)層を微細加工することで形成される。MEMS素子は、SOI層の一方のシリコンウエハが支持基板として使用され、他方のシリコンウエハが機能層として使用される。機能層は、エッチングにより分離されて、質量部と、この質量部を動作できるように支持する弾性変形部と、質量部の移動量を検知する可動電極部と固定電極部などが形成される。
【0003】
SOI層を加工する際に、SiO2などの前記絶縁層の一部が残されて、この絶縁層によって機能層の一部と支持基板とが接合されており、また質量部と弾性変形部および可動電極部などと支持基板との間の前記絶縁層が除去されて、質量部と弾性変形部および可動電極部などが、支持基板上の空間内で動作可能となる。
【0004】
以下の特許文献1と特許文献2には、角速度センサとして機能するMEMS素子が開示されている。
【0005】
特許文献1に記載された角速度センサは、基板の面と平行な向き(X方向)に移動自在に支持された一対の第1の振動体と、それぞれの第1の振動体に支持されて、基板の面に垂直な向き(Z方向)に移動自在に支持された第2の振動体が設けられている。一対の第1の振動体が前記面と平行な向き(X方向)で互いに逆位相となるように駆動されているときに、一対の第2の振動体の前記面と垂直な向き(Z方向)の振動を検知することで、Z方向のコリオリ力成分を検出でき、これにより、基板の面と平行なY軸回りの角速度、すなわちY軸と直交する面内にベクトルが向く角速度を知ることができる。
【0006】
特許文献2に記載された角速度センサであるジャイロスコープは、リング状のベースの内側にリング状のフレームが角振動できるように支持されており、このフレーム内に、角振動方向と直交する垂直方向(Z方向)へ振動できる2つの質量が設けられている。2つの前記質量をZ方向へ互いに逆向きに振動させ、コリオリ力で励起されるフレームの角振動を測定することで、前記角振動を含む面と平行なY軸周りの角速度、すなわちY軸と直交する面内にベクトルが向く角速度を知ることができる。
【特許文献1】特開2001−21360号公報
【特許文献2】特表2007−509346号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
前記特許文献1に記載された角速度センサは、一対の第1の振動体がX方向へ互いに逆位相となるように駆動され、この第1の振動体に支持されている第2の振動体がコリオリの力でZ方向へ動作させられる。ただし、前記第1の振動体を支持しているバネが単純な平板形状であり、平板形状のバネの撓み変形によって、第1の振動体がX方向へ振動自在に支持されている。そのため、コリオリ力によって第2の振動体にZ方向の移動力が与えられたときに、前記バネがX方向へ撓み変形するのみならず、Z方向へも変形しやすくなって、第1の振動体に本来のX方向への振動以外の不要な振動が重畳しやすい。
【0008】
また、前記第2の振動体を支持しているバネも平板状であるため、第2の振動体がZ方向へのコリオリ力を受けてZ方向へ動作するときに、第1の振動体へ与えられているX方向への振動によって、バネが本来の撓み方向以外の向きに変形しやすくなり、第2の振動体にコリオリ力以外の外乱の振動が重畳する心配がある。
【0009】
これは、特許文献2に記載された角速度センサにおいても同じであり、一対の質量部がZ方向へ振動駆動されているときに、質量部を支持している撓み部分がコリオリ力の影響などで本来の振動方向以外の方向へ変形し、コリオリ力を検出するためのリング状のフレームにノイズとなる振動が重畳するおそれがある。
【0010】
本発明は上記従来の課題を解決するものであり、質量部を振動自在に支持している弾性変形部を、質量部の本来の方向へ撓み変形しやすく且つそれ以外の方向へ変形しにくくして、質量部やその他の駆動部に余分なノイズ振動が重畳するのを防止しやすい角速度センサを提供することを目的としている。
【課題を解決するための手段】
【0011】
本発明は、質量部と、前記質量部を第1の方向へ往復移動自在に支持する弾性変形部と、前記質量部を前記第1の方向へ往復振動させる駆動部材と、質量部が角速度を持って運動したときに前記第1の方向と直交する第2の方向に作用する力を検出する検出部とを有する角速度センサにおいて、
前記弾性変形部は、支持部に固定される基端連結部と、前記質量部に連結される先端連結部と、前記先端連結部と前記基端連結部との間で前記第2の方向に沿って平行に延びる少なくとも2つの梁とを有しており、
前記駆動部材によって前記質量部が前記第1の方向へ往復振動させられるときに、それぞれの前記梁が前記質量部の振動方向に向けて曲げ変形することを特徴とするものである。
【0012】
本発明の角速度センサに設けられた弾性変形部は、平行な2本の梁または3本以上の梁を有しており、これら梁が質量部の駆動方向である第1の方向へ向けて撓み変形する。前記梁はコリオリ力の検出方向である第2の方向へ延びているため、弾性変形部がコリオリ力の力の影響を受けにくくなり、検出部に本来の検出方向の振動以外の振動ノイズが重畳しにくくなる。
【0013】
本発明は、前記基端連結部と前記先端連結部との間に、隣り合う梁どうしを連結する連結梁が設けられていることが好ましい。
【0014】
上記連結梁が設けられていると、隣り合う梁が互いの間隔を保って撓み変形するため、梁の変形が安定し、弾性変形部に捩じり変形などが生じにくくなる。
【0015】
本発明は、前記駆動部材が、少なくとも1つの梁に設けられた圧電素子であり、この圧電素子の電歪効果によって複数の梁が曲げ変形させられて、前記質量部が往復振動させられるものである。
【0016】
圧電素子を用いて梁に直接に振動駆動力を与えることで、質量部を効率よく振動させることができる。なお、本発明は弾性変形部とは別個に駆動電極を設け、質量部に設けられた電極と支持部に設けられた電極との間の静電力によって質量部が駆動されるものであってもよい。
【0017】
本発明は、前記質量部に対し前記第2の方向へ作用する力によって前記支持部が移動させられ、前記支持部の移動が前記検出部で検出されるものである。
【0018】
例えば、本発明は、前記支持部に対して2つの前記質量部が前記弾性変形部を介して支持されているとともに、前記駆動部材によって2つの前記質量部が互いに逆の位相で振動駆動され、前記質量部に対し前記第2の方向へ作用する力によって、前記支持部が回動し、前記検出部で前記支持部の回動が検出されるものである。
【0019】
本発明は、2つのSi層が絶縁層を介して接合されたSOI層が使用され、一方のSi層が前記支持基板として使用され、他方のSi層が機能層として使用されて、前記機能層から、前記質量部および前記弾性変形部が形成されており、前記質量部と前記支持基板との間および前記弾性変形部と前記支持基板との間で、前記絶縁層が除去されているものが好ましい。
【0020】
SOI層の一方のシリコンウエハから各動作部分を形成することで、薄型で小型の角速度センサを得ることができる。
【発明の効果】
【0021】
本発明の角速度センサは、質量部を支持している弾性変形部に複数の梁が設けられているため、この梁の撓みで質量部を安定して振動させることが可能である。また梁が検出方向である第2の方向へ延びているため、質量部に作用するコリオリ力によって梁にたわみが生じにくい。そのために、弾性変形部に対して質量部を駆動する振動以外の振動が重畳しにくくなり、検出出力にノイズが加わりにくくなる。
【発明を実施するための最良の形態】
【0022】
図1は本発明の実施の形態の角速度センサの機能層の構造を示す平面図、図2は図1に示す角速度センサをII−II線で切断した断面図である。図3(A)は機能層に設けられた検出回動部と駆動質量部を部分的に示す平面図、図3(B)は図3(A)のB−B線の断面図である。図4ないし図6は、第2の弾性変形部および面内駆動部材を実施の形態別に示す部分平面図である。図7(A)(B)は、角速度センサの動作説明図である。
【0023】
図1と図2に示す角速度センサ1はMEMS(Micro-Electro-Mechanical Systems)素子であり、図1に示すようにその平面形状は四角形である。
【0024】
図2に示すように、角速度センサ1は、支持基板2に機能層20が積層され、機能層20の一部分と支持基板2とが第1の絶縁層3を介して接合されている。支持基板2と機能層20および第1の絶縁層3は、SOI(Silicon on Insulator)層を微細加工して形成されている。ここで使用するSOI層は、2つのシリコンウエハが、絶縁層(Insulator)であるSiO2層を挟んで一体に接合されたものである。SOI層の一方のシリコンウエハが、支持基板2として使用され、他方のシリコンウエハが機能層20として使用されて、この機能層20が微細加工されてそれぞれの機能部が分離されて形成される。また、SiO2層の一部が残されて第1の絶縁層3となる。
【0025】
図2に示すように、機能層20には閉鎖部材4が重ねられて、機能層20は支持基板2と閉鎖部材4との間で挟まれた構造となっている。閉鎖部材4は単独のSi基板である。閉鎖部材4は、機能層20との対向面に第2の絶縁層5が形成されている。
【0026】
前記第2の絶縁層5の内部に導電体のパターンが埋設されてリード層が形成されている。また、前記第2の絶縁層5の表面と、機能層20のうちのそれぞれの通電部とが金属接合層を介して導通しており、それぞれの金属接合層が、第2の絶縁層5内に埋設されているリード層と導通している。
【0027】
図1には、第2の絶縁層5の内部に配線されているリード層が実線で示されている。第2の弾性変形部30a,30b,30c,30d,30e,30f,30g,30hに設けられた面内駆動部材の圧電素子が1相駆動である場合には、圧電素子の一方の電極層に通電する1つの駆動リード層11が設けられて、駆動リード層11が駆動電極パッド11aに接続される。前記圧電素子が2相駆動である場合は、前記駆動リード層11に加えて他の駆動リード層12によって圧電素子の電極層に通電され、前記駆動リード層12が駆動電極パッド12aに接続される。圧電素子の他方の電極層は、接地リード層13を介して接地電極パッド13aに導通されている。
【0028】
この実施の形態ではコリオリ力を検出する検出部が可動電極28部と第1の固定電極部23および第2の固定電極部24で構成されている。検出部では、可動電極部28と第1の固定電極部23との間の静電容量の変化、および可動電極部28と第2の固定電極部24との間の静電容量の変化が検出される。可動電極部28には所定の電位を間欠的に供給する通電リード層14が導通しており、この通電リード層14は通電電極パッド14aに接続されている。複数設けられているそれぞれの第1の固定電極部23は第1の検出リード層15に導通しており、第1の検出リード層15は第1の検出電極パッド15aに接続されている。同じく複数設けられている第2の固定電極部24は第2の検出リード層16に導通し、第2の検出リード層16は第2の検出電極パッド16aに接続されている。
【0029】
図1に示すY方向の両側では、閉鎖部材4が、支持基板2よりも突出しており、閉鎖部材4の突出部分において、第2の絶縁層5の表面に、前記電極パッド11a,12a,13a,14a,15a,16aが形成されて、外部回路との接続が可能となっている。
【0030】
なお、閉鎖部材4は、Siの単独の基板に限られるものではなく、ガラス基板などであってもよい。あるいは駆動回路や検出回路などの各種回路が収納されたICパッケージの表面が閉鎖部材4として使用され、ICパッケージの表面の絶縁層が第2の絶縁層5の代わりに使用されて、その上に機能層20および支持基板2が順に積層されて接合されているものであってもよい。この場合、前記各リード層11,12,13,14,15,16は、ICパッケージの上面に設けられた電極バンプなどに接続されて、ICパッケージの内部回路に接続される。
【0031】
図1と図2に示すように、機能層20では、シリコンウエハの一部が分離されて枠体層21が形成されている。図1には枠体層21が形成されている領域がハッチングを付して示されている。四角枠形状の枠体層21は角速度センサ1の周囲において額縁状に形成されている。枠体層21と支持基板2はSOI層のSiO2層の一部が残された第1の絶縁層3を介して接合され、枠体層21と第2の絶縁層5とが金属接合層を介して接合されて、枠体層21で囲まれた動作空間7が外気から遮断されている。
【0032】
動作空間7内には、機能層20のシリコンウエハから分離された固定支持部22a,22b,22c,22d、検出回動部26、第1の弾性変形部25a,25b,25c,25d、駆動質量部29a,29b、第2の弾性変形部30a,30b,30c,30d,30e,30f,30g,30h、可動電極部28、第1の固定電極部23および第2の固定電極部24が形成されている。図2に示すように、これら各部は同じシリコンウエハから分離されて形成されているため、Z方向の厚さ寸法が同じである。
【0033】
4個の固定支持部22a,22b,22c,22dは、枠体層21の内側の四隅のそれぞれに設けられている。固定支持部22a,22b,22c,22dの一方の面は、SOI層のSiO2層の一部が残された第1の絶縁層3を介して支持基板2に接合されており、固定支持部22a,22b,22c,22dの他方の面は、前記接合金属層を介して第2の絶縁層5に固定されている。固定支持部22a,22b,22c,22dを接合している接合金属層は、それぞれのリード層11,12,13,14に導通している。
【0034】
枠体層21のそれぞれの内辺の内側には、第1の電極固定部23aと第2の電極固定部24aとが交互に配置されている。第1の電極固定部23aと第2の電極固定部24aは、枠体層21のそれぞれの内辺の内側に沿って一列に配列されている。各内辺の内側において、反時計方向へ向かって、第1の電極固定部23aの次に第2の電極固定部24aが位置するように交互に配列されている。
【0035】
それぞれの第1の電極固定部23aは、その一方の面がSOI層のSiO2層の一部が残された第1の絶縁層3を介して支持基板2に接合されている。それぞれの第1の電極固定部23aの他方の面は、金属接合層を介して第2の絶縁層5に接合されており、それぞれの金属接合層は前記第1の検出リード層15に導通している。それぞれの第2の電極固定部24aは、その一方の面がSOI層のSiO2層の一部が残された第1の絶縁層3を介して支持基板2に接合されている。それぞれの第2の電極固定部24aの他方の面は、金属接合層を介して第2の絶縁層5に接合されており、それぞれの金属接合層は前記第2の検出リード層16に導通している。
【0036】
動作空間7内において機能層20から分離されて形成された各機能部のうちの前記固定支持部22a,22b,22c,22dと第1の電極固定部23aおよび第2の電極固定部24a以外の部分は、支持基板2および閉鎖部材4の双方に固定されていない。図2に示すように、動作空間7内では、支持基板2の内面に、機能層20の前記各部分に対向する凹部2aが形成されている。同様に閉鎖部材4の内面にも前記各部分に対向する部分に凹部4aが形成されている。
【0037】
機能層20では、前記固定支持部22aから第1の弾性変形部25aが延びており、同様に、固定支持部22b,22c,22dから第1の弾性変形部25b,25c,25dがそれぞれ延びている。第1の弾性変形部25a,25b,25c,25dは、動作空間7の中心に向かって放射状に延びている。動作空間7の中心部には四角い枠状の検出回動部26が設けられている。第1の弾性変形部25aは、リンク支点部27aを介して、検出回動部26の右上の角部に連結されている。同様に、第1の弾性変形部25b,25c,25dは、それぞれリンク支点部27b,27c,27dを介して検出回動部26の角部に連結されている。
【0038】
第1の弾性変形部25a,25b,25c,25dが曲げ変形し、且つリンク支点部27a,27b,27c,27dが変形することで、検出回動部26は、支持基板2の面と平行な面内で時計方向および反時計方向へ回動することが可能である。
【0039】
検出回動部26の4つの外辺には、外側へ延びる複数の可動電極部28が一体に形成されている。それぞれの可動電極部28は、検出回動部26の中心(図11の平面図での図心)から離れるにしたがって間隔が広がるように放射状に形成されている。
【0040】
複数の前記第1の電極固定部23aには、検出回動部26の中心に向けて放射状に延びる第1の固定電極部23が一体に形成されており、複数の前記第2の電極固定部24aには、検出回動部26の中心に向けて放射状に延びる第2の固定電極部24が一体に形成されている。それぞれの可動電極部28は、第1の固定電極部23と第2の固定電極部24との間に挟まれている。全ての第1の固定電極部23は、可動電極部28に対して時計方向に対向しており、全ての第2の固定電極部24は、可動電極部28に対して反時計方向に対向している。
【0041】
検出回動部26が時計方向へ回動すると、それぞれの可動電極部28と第1の固定電極部23との対向間隔が狭くなって、可動電極部28と第1の固定電極部23との間の静電容量が大きくなる。逆に可動電極部28と第2の固定電極部24との間の間隔が広くなって静電容量が低下する。検出回動部26が反時計方向へ回動すると、可動電極部28と第1の固定電極部23との間の静電容量が低下し、可動電極部28と第2の固定電極部24との間の静電容量が大きくなる。第1の固定電極部23から得られる静電容量の変化による検出出力と、第2の固定電極部24から得られる静電容量の変化による検出出力との差を求めることで、検出回動部26の時計方向および反時計方向への回動量を検出することが可能である。
【0042】
また、検出回動部26が、回動方向以外の方向であるX方向やY方向へ直線的に移動し、または支持基板2の面と垂直な方向であるZ方向へ動いたときは、1つの可動電極部28と第1の固定電極部23との対向面積の変化と、前記可動電極部28と第2の固定電極部24との対向面積の変化とが同じになり、第1の固定電極部23からの検出出力と第2の固定電極部24からの検出出力との差を求めることで、検出出力が相殺される。したがって、検出回動部26の本来の検出方向である回動方向以外の動作による外乱ノイズが検出出力に重畳することがない。
【0043】
検出回動部26は、図示右側でY方向に延びる右側支持部26aと、図示左側でY方向に延びる左側支持部26bと、左右の両支持部26a,26bの中間においてY方向に延びる中間支持部26cとを有している。
【0044】
右側支持部26aと中間支持部26cとの間に、第1の駆動質量部29aが設けられ、左側支持部26bと中間支持部26cとの間に、第2の駆動質量部29bが設けられている。すなわち、検出回動部26は一対の駆動質量部29a,29bを支持する支持部として機能している。
【0045】
図7にも示すように、第1の駆動質量部29aの右側部はY方向に間隔を空けて設けられた2つの第2の弾性変形部30a,30bを介して右側支持部26aに支持されているとともに、左側部はY方向に間隔を空けて設けられた2つの第2の弾性変形部30c,30dを介して中間支持部26cに支持されている。第2の駆動質量部29bの右側部はY方向に間隔を空けて設けられた2つの第2の弾性変形部30e,30fを介して中間支持部26cに支持されているとともに、左側部はY方向に間隔を空けて設けられた2つの第2の弾性変形部30g,30hを介して左側支持部26bに支持されている。
【0046】
左右の合計4箇所で第2の弾性変形部30a,30b,30c,30dで支持された第1の駆動質量部29aは、検出回動部26の内部において、支持基板2の面と平行なX方向(第1の方向)へ往復移動自在である。同様に、左右の合計4箇所で第2の弾性変形部30e,30f,30g,30hで支持された第2の駆動質量部29bも、検出回動部26の内部において、支持基板2の面と平行なX方向(第1の方向)へ往復移動自在である。
【0047】
図3は、第1の駆動質量部29aが4個の第2の弾性変形部30a,30b,30c,30dで支持されている状態を示す部分拡大図である。
【0048】
図3(A)に示すように、第1の駆動質量部29aは長辺がY方向に向けられた長方形状である。第1の駆動質量部29aの右側部にはZ方向に貫通してY方向に長い長穴36aが形成されているとともに、この長穴36aの右側に連結弾性変形部35aが一体に形成されている。連結弾性変形部35aは、Y側の両端部35c,35dが第1の駆動質量部29aと一体化されており、両端部35c,35dを支点としてX方向へ湾曲変形可能である。第1の駆動質量部29aの左側部には長穴36bを介して連結弾性変形部35bが一体に形成されている。連結弾性変形部35bは、Y方向の両端部35e,35fを介して第1の駆動質量部29aに一体に連結されているとともに、両端部35e,35fを支点としてX方向へ湾曲変形可能である。
【0049】
第2の弾性変形部30a,30bは、検出回動部26の右側支持部26aと連結弾性変形部35aとを連結している。第2の弾性変形部30aと第2の弾性変形部30bは、X方向に延びる線を挟んで線対称形状である。第2の弾性変形部30c,30dは、検出回動部26の中間支持部26cと連結弾性変形部35aとを連結している。第2の弾性変形部30cと第2の弾性変形部30dは、X方向に延びる線を挟んで線対称形状である。また、第2の弾性変形部30aと第2の弾性変形部30cとがY方向に延びる線を挟んで線対称形状であり、第2の弾性変形部30bと第2の弾性変形部30dもY方向に延びる線を挟んで線対称形状である。
【0050】
図4(A)に、第2の弾性変形部30aが拡大されて示されている。第2の弾性変形部30aの基端連結部31は、検出回動部26の右側支持部26aに一体に連結されており、基端連結部31には質量を低減させるための穴31aがZ方向に貫通して形成されている。第2の弾性変形部30aの先端連結部32は連結弾性変形部35aに一体に連結されており、先端連結部32には質量を低減させるための穴32aがZ方向に貫通して形成されている。
【0051】
基端連結部31と先端連結部32との間には、第1の梁33と第2の梁34とが設けられている。第1の梁33のY1側の端部33aは基端連結部31に一体に連結され、Y2側の端部33bは先端連結部32に一体に連結されている。同様に、第2の梁34のY1側の端部34aは基端連結部31に一体に連結され、Y2側の端部34bは先端連結部32に一体に連結されている。
【0052】
第1の梁33と第2の梁34は、Z方向に貫通する空間部38を挟んで互いに平行に形成され、共にY方向(第2の方向)へ直線的に延びている。そして、空間部38をY方向に二分する中央部において、第1の梁33と第2の梁34を連結する連結梁37が一体に形成されている。第1の梁33は、端部33aから端部33bまで幅寸法および断面積が均一であり、第2の梁34も、端部34aから端部34bまで幅寸法および断面積が均一である。
【0053】
第1の梁33と第2の梁34は、幅寸法および断面積が同一であってもよいし、異なっていてもよい。図4(A)に示すように、第1の梁33には面内駆動部材41が取り付けられ、第1の梁33に変形力が与えられるため、第1の梁33の幅寸法および断面積が第2の梁34よりも大きいことが好ましい。
【0054】
面内駆動部材41は、圧電素子であり、第1の梁33のZ方向に向く上面と下面の双方に設けられている。第1の梁33はシリコンウエハから分離されたものであって導電性である。よって、第1の梁33の上面と下面に絶縁層が形成され、この絶縁層の上に下部電極層と圧電素子層と上部電極層とが順に積層されて前記面内駆動部材41が形成されている。
【0055】
上部電極層と下部電極層との間に、交流電圧を印加すると、第1の梁33の上下両面に設けられた面内駆動部材41が一緒に伸びまた一緒に縮み、その結果、図4(B)に示すように、第1の梁33は基端連結部31が支持端となって、先端連結部32がX1−X2方向(第1の方向)へ移動するように曲げ変形振動を生じる。
【0056】
第1の駆動質量部29aを支持している他の第2の弾性変形部30b,30c,30dは、図4(A)に示す第2の弾性変形部30aとは向きが相違し、または対称形状であるが、その構造は実質的に同じである。すなわち、第2の弾性変形部30b,30c,30dも、第1の駆動質量部29aから離れる側に第1の梁33が設けられ、第1の駆動質量部29aに接近する側に第2の梁34が設けられている。そして、第1の梁33の上下両面に面内駆動部材41が設けられている。
【0057】
なお、前記面内駆動部材41は、第1の梁33の上面と下面のいずれか一方の面のみに設けられていてもよい。これは以下の他の実施の形態においても同じである。
【0058】
図7(A)に示すように、左側の第2の駆動質量部29bの右側部には連結弾性変形部35gが形成され、左側部に連結弾性変形部35hが形成されている。連結弾性変形部35g,35hの構造は、第1の駆動質量部29aに設けられた連結弾性変形部35a,35bと同じである。第2の弾性変形部30e,30fは、中間支持部26cと連結弾性変形部35gとを連結しており、第2の弾性変形部30g,30hは、左側支持部26bと連結弾性変形部35hとを連結している。
【0059】
第2の駆動質量部29bを4箇所で支持している第2の弾性変形部30e,30f,30g,30hは、図4(A)に示す第2の弾性変形部30a,30b,30c,30dと構造が実質的に同じであり、それぞれが、第2の駆動質量部29bから離れる側に第1の梁33を有し、第2の駆動質量部29bに接近する側に第2の梁34が設けられ、第1の梁33の上下両面に面内駆動部材41が設けられている。
【0060】
枠状の検出回動部26と第1の弾性変形部25aおよび固定支持部22aのそれぞれの下面には絶縁層を介してリードパターンが形成されている。合計8箇所に設けられた第2の弾性変形部30aないし30hの第1の梁33に設けられた面内駆動手段41の一方の電極層が、前記リードパターンに接続されている。さらに、前記リードパターンは、駆動リード層11を介して駆動電極パッド11aに接合されている。
【0061】
枠状の検出回動部26と第1の弾性変形部25aおよび固定支持部22aのそれぞれの下面には、絶縁層を介してさらに他のリードパターンが形成されている。合計8箇所に設けられた面内駆動手段41の他方の電極層は、前記リードパターンに接続されている。さらに、前記リードパターンは、接地リード層13を介して接地電極パッド13aに導通されている。
【0062】
第2の弾性変形部30a,30b,30g,30hに設けられた面内駆動部材41がY方向へ伸び変形するときに、弾性変形部30c,30d,30e,30fに設けられた面内駆動部材41がY方向に縮み変化し、逆に、第2の弾性変形部30a,30b,30g,30hに設けられた面内駆動部材41がY方向へ縮み変形するときに、弾性変形部30c,30d,30e,30fに設けられた面内駆動部材41がY方向に延び変形するように、それぞれの面内駆動部材41の分極方向が設定され、または上下の電極層の駆動リード層11と接地リード層13への接続状態が選択されている。よって、右側の第1の駆動質量部29aがX1方向へ駆動されたときに第2の駆動質量部29bがX2方向へ駆動され、右側の第1の駆動質量部29aがX2方向へ駆動されたときに第2の駆動質量部29bがX1方向へ駆動されるように、第1の駆動質量部29aと第2の駆動質量部29bが、X方向へ互いに逆の位相で振動するように駆動される。
【0063】
図5と図6は、前記第1の梁33に取り付けられる面内駆動部材の他の例を示している。
【0064】
図5(A)に示す実施の形態では、第1の弾性変形部の第1の梁33の上下両面に面内駆動部材41が、第2の梁34の上下両面に面内駆動部材42が設けられている。これら面内駆動部材41,42は、いずれも第1の梁33と第2の梁34の上下面に絶縁層を形成し、その表面に下部電極層と圧電素子層および上部電極層を順に重ねて積層することで形成されている。
【0065】
第1の梁33に設けられた面内駆動部材41がY方向に伸びるときに、第2の梁34に設けられた面内駆動部材42がY方向へ縮むように、面内駆動部材41,42を構成する圧電素子層の分極方向や上下の電極層の駆動リード層11と接地リード層13への接続状態が選択されている。その結果、図5(B)に示すように、基端連結部31を支持端として、先端連結部32がX1−X2方向へ触れるように曲げ変形振動する。
【0066】
図6(A)に示す実施の形態では、第1の梁33の連結梁37よりもY2側の上下面と、第2の梁34の連結梁37よりもY1側の上下面に、同じ面内駆動部材43が設けられており、第2の梁34の連結梁37よりもY1側の上下面と、第2の梁34の連結梁37よりもY2側の上下面に、同じ面内駆動部材44が設けられている。面内駆動部材43,44は、いずれも第1の梁33と第2の梁34の上下面に絶縁層を形成し、その表面に下部電極層と圧電素子層および上部電極層を順に重ねて積層することで形成されている。
【0067】
2つの面内駆動部材43,43がY方向に伸びるときに、2つの面内駆動部材44,44がY方向へ縮み、面内駆動部材43,43がY方向に縮むときに、2つの面内駆動部材44,44がY方向へ伸びるように、面内駆動部材43,44を構成する圧電素子層の分極方向や上下の電極層の駆動リード層11と接地リード層13への接続状態が選択されている。その結果、図6(B)に示すように、基端連結部31を支持端として、先端連結部32がX1−X2方向へ触れるように、第1の梁33と第2の梁34の双方がS字状に曲げ変形振動する。このとき、先端連結部32が、X−Y平面内であまり回動することなくX1−X2方向へ振動するため、第2の弾性変形部30aないし30hと、連結弾性変形部35a,35b,35g,35hとの連結部に捩じり応力が作用しにくくなる。
【0068】
図5または図6に示すように、1つの第2の弾性変形部に2種類の面内駆動部材が設けられ、2種類の面内駆動部材を別々に駆動する必要が有る場合、それぞれの面内駆動部材の一方の電極層は、接地リード層13に接続されるが、他方の電極層は、駆動リード層11と駆動リード層12に別々に接続される。
【0069】
図4ないし図6に示すように、第2の弾性変形部30aないし30hは、基端連結部31と先端連結部32との間に、2つの梁33,34が互いに平行に設けられたいわゆるラーメン構造であるため、2つの梁33,34がX−Y平面内でX1方向とX2方向へ撓む際に、2つの梁33,34がX−Y平面と平行に動きやすく、X−Y平面に対して捻れ方向に変形しにくい。また、基端連結部31と先端連結部32が、図4(A)に示す変形前の平行状態を保ったまま、先端連結部32がX1−X2方向へ移動するので、先端連結部32と連結弾性変形部35aとの連結部にX−Y平面内での捩じりが生じにくい。また、この連結部で若干の捻れが生じても、この捩れは、連結弾性変形部35aの撓み変形で吸収される。
【0070】
また、第2の弾性変形部30aないし30hは、図4ないし図6に示すように、第1の梁33と第2の梁34の中間点が連結梁37で連結されているため、第1の梁33と第2の梁34が、X方向の間隔を保ったまま変形できるようになる。よって、面内駆動部材41ないし44で発せられる駆動力が、第1の駆動質量部29aと第2の駆動質量部29bに対して、損失があまり無い状態で伝達される。
【0071】
第1の駆動質量部29aと第2の駆動質量部29bは、機能層20であるシリコンウエハから分離されて形成されている。そこで、図3(B)に示すように、第1の駆動質量部29aと第2の駆動質量部29bの上に、シリコンよりも比重の大きい錘層39が形成されている。錘層39は、Mo、Hf、Ta、W、Ru、Rh、Pd、Ag、Re、Os、Ir、Pt、Auなどのいずれかまたはこれらの合金で形成される。
【0072】
次に、前記角速度センサ1の動作を説明する。
図1に示す接地電極パッド13aを接地電位とし、駆動電極パッド11aに交流の駆動電圧を与え、または駆動電極パッド11aと駆動電極パッド12aに交流の駆動電圧を与えると、それぞれの第2の弾性変形部30aないし30hに設けられた面内駆動部材41(図4参照)または面内駆動部材41,42(図5参照)あるいは面内駆動部材43,44(図6参照)が、駆動される。このときの駆動力で、第1の駆動質量部29aと第2の駆動質量部29bが、支持基板2の面と平行なX−Y平面内においてX1−X2方向(第1の方向)へ駆動される。図7(B)において矢印(i)(ii)で示すように、第1の駆動質量部29aがX1方向へ駆動されるときに第2の駆動質量部29bがX2方向へ駆動され、第1の駆動質量部29aがX2方向へ駆動されるときに第2の駆動質量部29bがX1方向へ駆動される。このように、第1の駆動質量部29aと第2の駆動質量部29bは、位相が逆となるように振動駆動される。
【0073】
駆動中の角速度センサ1が角速度を有して運動し、その角速度のベクトルがX−Y平面内に位置しているとき、すなわち、角速度センサ1が、X−Y平面に垂直なOz軸回りの角速度を有して運動しているとき、第1の駆動質量部29aと第2の駆動質量部29bに対して、その駆動時の速度ベクトルと直交する向き(Y1−Y2方向:第2の方向)のコリオリの力が作用する。第1の駆動質量部29aと第2の駆動質量部29bが互いに逆向きの速度ベクトルを有して運動するため、第1の駆動質量部29aと第2の駆動質量部29bに対してY1−Y2方向への互いに逆向きのコリオリ力が作用する。
【0074】
第1の駆動質量部29aと第2の駆動質量部29bに作用するコリオリ力は、第2の弾性変形部30aないし30hを介して検出回動部26に作用する。第1の駆動質量部29aに作用するコリオリ力と、第2の駆動質量部29bに作用するコリオリ力は、Y方向において互いに逆向きである。そのため、検出回動部26に偶力が作用し、検出回動部26が、図7(B)において(iii)(iv)で示すように、垂直軸Oz回りに回動振動を生じる。この回動振動により、それぞれの可動電極部28と第1の固定電極部23との対向距離および静電容量が変化し、可動電極部28と第2の固定電極部24との対向距離および静電容量が変化する。
【0075】
図1に示す通電電極パッド14aには、パルス状の電圧が与えられ、この電圧は、通電シード層14からシリコンの固定支持部22cに与えられる。パルス状の電圧は、第1の弾性変形部25cを通じて、シリコン製の検出回動部26に与えられ、さらに可動電極部28に与えられる。電圧のパルスの立ち上がり時に第1の固定電極部23に短時間に流れる電流の電流値は、可動電極部28と第1の固定電極部23との間の静電容量の変化に応じて変動し、これは第2の固定電極部24に流れる電流においても同じである。第1の固定電極部23の検知出力と第2の固定電極部24の検知出力との差を求めることで、検出回動部26の回動時の振幅を検知でき、これにより角速度を換算することが可能になる。
【0076】
第2の弾性変形部30aないし30hは、図4ないし図6に示すいわゆるラーメン構造であり、Y方向の剛性が高い。そのため、第1の駆動質量部29aと第2の駆動質量部29bにY1−Y2方向のコリオリ力が作用したときに、第2の弾性変形部30aないし30hが座屈することなく、その力が検出回動部26に与えられる。よって、第1の駆動質量部29aと第2の駆動質量部29bおよび検出回動部26が一体となって(iii)(iv)方向へ回動できるようになる。
【図面の簡単な説明】
【0077】
【図1】本発明の実施の形態の角速度センサの全体構造を示す平面図、
【図2】図1に示す角速度センサをII−II線で切断した断面図、
【図3】(A)は、検出回動部における駆動質量部の支持構造を拡大して示す平面図、(B)は(A)をB−B線で切断した断面図、
【図4】(A)は、第2の弾性変形部と面内駆動手段を拡大して示す平面図、(B)は前記第2の弾性変形部の変形動作を示す説明図、
【図5】(A)は、他の実施の形態の第2の弾性変形部と面内駆動手段を拡大して示す平面図、(B)は前記第2の弾性変形部の変形動作を示す説明図、
【図6】(A)は、さらに他の実施の形態の第2の弾性変形部と面内駆動手段を拡大して示す平面図、(B)は前記第2の弾性変形部の変形動作を示す説明図、
【図7】(A)は駆動質量部と検出回動部および可動電極部を示す平面図、(B)は動作説明図、
【符号の説明】
【0078】
1 角速度センサ
2 支持基板
3 第1の絶縁層
4 閉鎖部材
5 第2の絶縁層
7 動作空間
11,12,13,14,15,16 リード層
11a,12a,13a,14a,15a,16a 電極パッド
20 機能層
22a,22b,22c,22d 固定支持部
23 第1の固定電極部
24 第2の固定電極部
25a,25b,25c,25d 第1の弾性変形部
26 検出回動部(支持部)
28 可動電極部
29a 第1の駆動質量部
29b 第2の駆動質量部
30a,30b,30c,30d,30e,30f,30g,30h 第2の弾性変形部
31 基端連結部
32 先端連結部
33 第1の梁
34 第2の梁
41,42,43,44 面内駆動部材
【特許請求の範囲】
【請求項1】
質量部と、前記質量部を第1の方向へ往復移動自在に支持する弾性変形部と、前記質量部を前記第1の方向へ往復振動させる駆動部材と、質量部が角速度を持って運動したときに前記第1の方向と直交する第2の方向に作用する力を検出する検出部とを有する角速度センサにおいて、
前記弾性変形部は、支持部に固定される基端連結部と、前記質量部に連結される先端連結部と、前記先端連結部と前記基端連結部との間で前記第2の方向に沿って平行に延びる少なくとも2つの梁とを有しており、
前記駆動部材によって前記質量部が前記第1の方向へ往復振動させられるときに、それぞれの前記梁が前記質量部の振動方向に向けて曲げ変形することを特徴とする角速度センサ。
【請求項2】
前記基端連結部と前記先端連結部との間に、隣り合う梁どうしを連結する連結梁が設けられている請求項1記載の角速度センサ。
【請求項3】
前記駆動部材は、少なくとも1つの梁に設けられた圧電素子であり、この圧電素子の電歪効果によって複数の梁が曲げ変形させられて、前記質量部が往復振動させられる請求項1または2記載の角速度センサ。
【請求項4】
前記質量部に対し前記第2の方向へ作用する力によって前記支持部が移動させられ、前記支持部の移動が前記検出部で検出される請求項1ないし3のいずれかに記載の角速度センサ。
【請求項5】
前記支持部に対して2つの前記質量部が前記弾性変形部を介して支持されているとともに、前記駆動部材によって2つの前記質量部が互いに逆の位相で振動駆動され、前記質量部に対し前記第2の方向へ作用する力によって、前記支持部が回動し、前記検出部で前記支持部の回動が検出される請求項4記載の角速度センサ。
【請求項6】
2つのSi層が絶縁層を介して接合されたSOI層が使用され、一方のSi層が前記支持基板として使用され、他方のSi層が機能層として使用されて、前記機能層から、前記質量部および前記弾性変形部が形成されており、前記質量部と前記支持基板との間および前記弾性変形部と前記支持基板との間で、前記絶縁層が除去されている請求項1ないし5のいずれかに記載の角速度センサ。
【請求項1】
質量部と、前記質量部を第1の方向へ往復移動自在に支持する弾性変形部と、前記質量部を前記第1の方向へ往復振動させる駆動部材と、質量部が角速度を持って運動したときに前記第1の方向と直交する第2の方向に作用する力を検出する検出部とを有する角速度センサにおいて、
前記弾性変形部は、支持部に固定される基端連結部と、前記質量部に連結される先端連結部と、前記先端連結部と前記基端連結部との間で前記第2の方向に沿って平行に延びる少なくとも2つの梁とを有しており、
前記駆動部材によって前記質量部が前記第1の方向へ往復振動させられるときに、それぞれの前記梁が前記質量部の振動方向に向けて曲げ変形することを特徴とする角速度センサ。
【請求項2】
前記基端連結部と前記先端連結部との間に、隣り合う梁どうしを連結する連結梁が設けられている請求項1記載の角速度センサ。
【請求項3】
前記駆動部材は、少なくとも1つの梁に設けられた圧電素子であり、この圧電素子の電歪効果によって複数の梁が曲げ変形させられて、前記質量部が往復振動させられる請求項1または2記載の角速度センサ。
【請求項4】
前記質量部に対し前記第2の方向へ作用する力によって前記支持部が移動させられ、前記支持部の移動が前記検出部で検出される請求項1ないし3のいずれかに記載の角速度センサ。
【請求項5】
前記支持部に対して2つの前記質量部が前記弾性変形部を介して支持されているとともに、前記駆動部材によって2つの前記質量部が互いに逆の位相で振動駆動され、前記質量部に対し前記第2の方向へ作用する力によって、前記支持部が回動し、前記検出部で前記支持部の回動が検出される請求項4記載の角速度センサ。
【請求項6】
2つのSi層が絶縁層を介して接合されたSOI層が使用され、一方のSi層が前記支持基板として使用され、他方のSi層が機能層として使用されて、前記機能層から、前記質量部および前記弾性変形部が形成されており、前記質量部と前記支持基板との間および前記弾性変形部と前記支持基板との間で、前記絶縁層が除去されている請求項1ないし5のいずれかに記載の角速度センサ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2010−117293(P2010−117293A)
【公開日】平成22年5月27日(2010.5.27)
【国際特許分類】
【出願番号】特願2008−291844(P2008−291844)
【出願日】平成20年11月14日(2008.11.14)
【出願人】(000010098)アルプス電気株式会社 (4,263)
【Fターム(参考)】
【公開日】平成22年5月27日(2010.5.27)
【国際特許分類】
【出願日】平成20年11月14日(2008.11.14)
【出願人】(000010098)アルプス電気株式会社 (4,263)
【Fターム(参考)】
[ Back to top ]