
角速度センサ
【課題】故障等を高精度に自己診断することができる角速度センサを提供する。
【解決手段】第一駆動腕と第二駆動腕とを有する音叉型の振動子と、駆動平面に沿って振動するように第一駆動腕を励振する第一駆動素子と、駆動平面に沿って振動するように第二駆動腕を励振する第二駆動素子と、第一駆動腕及び第二駆動腕を振動させる制御部と、第一駆動腕と第二駆動腕よりの振動を検出し、角速度を検出する検出部と、を備える角速度センサであって、制御部は、第一駆動腕と第二駆動腕とをそれぞれ同一周期及び同一振幅で、且つ振動位相が逆位相となるように、第一駆動素子及び第二駆動素子に駆動信号を出力する通常モードと、第一駆動腕と第二駆動腕とをそれぞれ同一周期及び同一振幅で、且つ第一駆動腕に対する第二駆動腕の振動位相が逆位相からずれつつ同位相とはならないように、第一駆動素子及び第二駆動素子に駆動信号を出力する自己診断モードと、を実行する。
【解決手段】第一駆動腕と第二駆動腕とを有する音叉型の振動子と、駆動平面に沿って振動するように第一駆動腕を励振する第一駆動素子と、駆動平面に沿って振動するように第二駆動腕を励振する第二駆動素子と、第一駆動腕及び第二駆動腕を振動させる制御部と、第一駆動腕と第二駆動腕よりの振動を検出し、角速度を検出する検出部と、を備える角速度センサであって、制御部は、第一駆動腕と第二駆動腕とをそれぞれ同一周期及び同一振幅で、且つ振動位相が逆位相となるように、第一駆動素子及び第二駆動素子に駆動信号を出力する通常モードと、第一駆動腕と第二駆動腕とをそれぞれ同一周期及び同一振幅で、且つ第一駆動腕に対する第二駆動腕の振動位相が逆位相からずれつつ同位相とはならないように、第一駆動素子及び第二駆動素子に駆動信号を出力する自己診断モードと、を実行する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、故障の自己診断が可能な角速度センサに関する。
【背景技術】
【0002】
従来、物体の角速度を検出する角速度センサ又はそのセンサ素子として、振動する質量体に回転が加えられた際に生じる慣性力の一種であるコリオリ力に起因して発生する非常に微弱な振動や変位を、圧電素子等の検出手段を介して検出し、各方向における回転や動作を検知・測定するものが知られている。かかる角速度センサは、自動車、船舶、航空機、ロケット等の姿勢を自律制御するための技術に広く使用されており、最近では、カーナビゲーションシステム、デジタルカメラ、ビデオカメラ、ゲーム機、携帯電話等の小型の電子機器にも搭載されるようになってきている。それに伴い、角速度センサの更なる高感度化、薄型化、小型化及び耐久性の向上が要請されており、それに応えるべく、微細加工技術によって形成された圧電薄膜素子を用いた角速度センサが種々提案されている。
【0003】
上述のように薄型化・小型化を図った圧電薄膜素子を用いた角速度センサとしては、振動腕(駆動腕及び検出腕)を備える所謂音叉型の角速度センサが知られている。しかしながら、このような音叉型の角速度センサは、各振動腕の欠損や、駆動又は検出用圧電素子及び各圧電素子に接続された回路等の短絡及び断線等を含む破損によって、動作不良及び機能低下といった不具合を生じやすい傾向にある。
【0004】
そこで、かかる不都合を防止すべく、例えば特許文献1には、音叉形の一対の駆動板とこの一対の駆動板の各々の先端に直交関係をなすように設けられた検知板とからなる振動体と、この振動体を駆動振動させるために駆動板に設けられた駆動手段と、振動体の駆動方向と直交する方向に発生する角速度出力を得るために検知板に設けられた検出手段とを備え、検知板と駆動板との機械結合に起因する機械結合信号を検出手段により検出し、機械結合信号を発生させるための手段を別個に設けることなく角速度センサに生じた故障の有無を自己診断するための機構が記載されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平8−327363号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、上記従来の特許文献1に記載された角速度センサにおいては、機械的もれ振動の位相が駆動振幅の位相と同相であり、故障を自己診断するための特別な振動検出回路を必要とする。よって、特許文献1の角速度センサでは、通常のコリオリ検出回路における故障を判定することが困難であり、また、追加的に設けた特別な検出回路自体が故障する可能性も高くなると考えられる。
【0007】
そこで、本発明は上記事情に鑑みてなされたものであり、特別な振動検出回路を設けることなく、角速度センサにおける故障の有無を検知する自己診断モードで動作可能な角速度センサを提供することを目的とする。
【課題を解決するための手段】
【0008】
圧電薄膜素子を用いた角速度センサの製造においては、圧電薄膜素子の配置態様や圧電薄膜素子を配置する音叉の寸法精度など極めて高い加工精度が要求される。従って、膜厚が極めて薄く且つ表面積も小さな角速度センサを製造するにあたっては、音叉を構成する各振動腕の形状や設置バランス等を設計通りの理想型とすることが求められると共に、圧電薄膜素子の位置を精確に保つことが求められる。微細な角速度センサを製造するにあたってこのような精度を保つことは製造上極めて困難であるため、例えば、音叉を構成する駆動腕のX方向振動が検出腕側にもれたり、駆動腕が理想的なxy平面に沿った振動だけではなくZ方向の振動も生起し得るものである。通常の角速度検出動作においては、このようなもれ振動は同位相であり、結果的にキャンセルされてしまうものであるが、この振動の発生源となる駆動腕の駆動を工夫することで、角速度検出時と同様の位相差のある振動を発生させることができることに本発明者らは想到した。本発明はこのような知見に基づいてなされたものである。
【0009】
上記課題を解決するために、本発明による角速度センサは、第一駆動腕と第二駆動腕とを有する音叉型の振動子と、第一駆動腕に設けられ、駆動平面に沿って振動するように第一駆動腕を励振する第一駆動素子と、第二駆動腕に設けられ、駆動平面に沿って振動するように第二駆動腕を励振する第二駆動素子と、第一駆動素子と第二駆動素子とのそれぞれに駆動信号を出力し、第一駆動腕及び第二駆動腕を振動させる制御部と、第一駆動腕と第二駆動腕よりの振動を検出し、振動子に入力される角速度を検出する検出部と、を備える角速度センサであって、制御部は、第一駆動腕と第二駆動腕とをそれぞれ同一周期及び同一振幅で、且つ第一駆動腕に対する第二駆動腕の振動位相が逆位相となるように、第一駆動素子及び第二駆動素子に駆動信号を出力する通常モードと、第一駆動腕と第二駆動腕とをそれぞれ同一周期及び同一振幅で、且つ第一駆動腕に対する第二駆動腕の振動位相が逆位相からずれつつ同位相とはならないように、第一駆動素子及び第二駆動素子に駆動信号を出力する自己診断モードと、を実行することを特徴としている。
【0010】
このような構成を有する本発明の角速度センサにおいて、振動子の第一駆動腕には第一駆動素子が設けられ、第二駆動腕には第二駆動素子が設けられているので、第一駆動腕及び第二駆動腕をそれぞれ駆動平面に沿って振動するように励振することができる。この振動子に角速度が入力されると、コリオリ力によって駆動平面に直交する方向の力が発生し、第一駆動腕及び第二駆動腕は駆動平面に直交する方向に振動することになる。通常モードでは、前記第一駆動腕と前記第二駆動腕とをそれぞれ同一周期及び同一振幅で、且つ互いの振動位相が逆位相となるように駆動することで、振動子に入力された角速度を精確に検出するものとしている。
【0011】
ところで、第一駆動腕には第一駆動素子を、第二駆動腕には第二駆動素子を設けている関係上、上述したような製造上の理由により第一駆動腕及び第二駆動腕は、振動子に角速度が入力されていない状態であっても、振動平面方向の駆動振動や振動平面に直交する方向に発生する微小な振動が検出部にもれてしまう。本発明では、角速度が未入力の場合であっても検出部にもれてしまう所謂「もれ振動」を利用し、自己診断を実行可能なように構成している。具体的には、第一駆動腕と第二駆動腕とをそれぞれ同一周期及び同一振幅で、且つ互いの振動位相が逆位相からずれつつ同位相とはならないように駆動することで、もれ振動によって検出部では擬似的な角速度を検出するように構成している。この擬似的な角速度が定常的に現れるか否かによって、角速度検出装置を構成する機能部に故障が発生しているか否かを自己診断することが可能となる。
【0012】
また、このように構成した角速度センサは、故障の自己診断を行うために追加の振動検出回路や特別な制御手段等を必要としないので、角速度センサの製造における組立て精度を向上させ、製造コストを低減することができる。また、自己診断機能付きの角速度センサとして必要な構成手段の総数を抑えることで経年的故障リスクを低減することもできる。
【0013】
本発明による角速度センサは、第一駆動腕と第二駆動腕とが接続される基部と、基部における第一駆動腕と第二駆動腕との接続部位と対向する位置に接続された一対の検出腕とを備え、駆動腕にて生じた振動を、基部を介して伝搬させ一対の検出腕にて検出するように構成することもできる。
【0014】
このように構成した角速度センサは、駆動平面内の駆動振動と、駆動振動に比して極めて小さい、コリオリ力による駆動平面に直交する方向の振動とが混在しないように、基部を介して駆動腕と検出腕とを離隔させ、検出感度及び精度の向上を実現することができる。
【0015】
本発明による角速度センサは、駆動腕で生じた振動を当該駆動腕にて検出するように構成することができる。
【0016】
このようにして構成した角速度センサは、検出腕が不要であるので、角速度センサ自体の面積を低減させ、角速度センサのさらなる小型化が実現する。また、駆動腕と検出腕が同一であることで、駆動腕に生じたコリオリ力に起因する振動をより直接的に検知することが可能となる。
【0017】
本発明による角速度センサは、検出された振動信号が規定の数値範囲に存在しないと判定するときに、前記角速度センサを故障と診断する判定回路をさらに有するように構成することができる。
【0018】
このようにして構成した角速度センサは、動作不良及び機能低下といった角速度センサに生じる不具合を簡便に自己診断することが可能であり、判定結果を、角速度センサ或いはそれが設けられたセンサパッケージの交換や保守時期等の指標とすることができる。
【0019】
本発明による角速度センサは、制御部が、第一駆動腕の駆動のタイミングを早める又は遅らせる及び/又は第二駆動腕の駆動のタイミングを早める又は遅らせる様に構成することができる。
【0020】
このようにして構成した角速度センサは、故障検出の為の専用の回路を追加的に設ける必要はなく、第一駆動腕及び/又は第二駆動腕の振動のタイミングをずらして駆動させるだけで、角速度センサにおける不具合の発生の有無を精確に把握することが可能であり、簡便に角速度センサの自己診断を行うことが可能である。
【0021】
第一及び第二の駆動腕の各々が、上面に、第一駆動腕と第二駆動腕各々の延在方向に延びる中心線を境界として左右等間隔に離間して設けられた2つの駆動素子を有するように構成しても良い。
【0022】
このようにして構成した角速度センサは、駆動腕上面にのみに駆動素子が存在することで、角速度センサの厚さ方向に僅かな振動を生起させ、それによって角速度センサに対して積極的にZ方向のもれ振動を付与することが可能となる。従って、角速度センサがその他の要因ではもれ振動を生起させない場合にも、もれ振動を利用する角速度センサの故障の自己診断を行うことができる。
【発明の効果】
【0023】
以上のように、本発明による角速度センサは、第一駆動腕と第二駆動腕とを有する音叉型の振動子と、第一駆動腕に設けられ、駆動平面に沿って振動するように第一駆動腕を励振する第一駆動素子と、第二駆動腕に設けられ、駆動平面に沿って振動するように第二駆動腕を励振する第二駆動素子と、第一駆動素子と第二駆動素子とのそれぞれに駆動信号を出力し、第一駆動腕及び第二駆動腕を振動させる制御部と、第一駆動腕と第二駆動腕よりの振動を検出し、振動子に入力される角速度を検出する検出部と、を備え、制御部は、第一駆動腕と第二駆動腕とをそれぞれ同一周期及び同一振幅で、且つ第一駆動腕に対する第二駆動腕の振動位相が逆位相となるように、第一駆動素子及び第二駆動素子に駆動信号を出力する通常モードと、第一駆動腕と第二駆動腕とをそれぞれ同一周期及び同一振幅で、且つ第一駆動腕に対する第二駆動腕の振動位相が逆位相からずれつつ同位相とはならないように、第一駆動素子及び第二駆動素子に駆動信号を出力する自己診断モードと、を実行するので、所謂「もれ振動」を利用して検出部で擬似的な角速度を検出することができる。そして、この擬似的な角速度が定常的に現れるか否かによって、角速度検出装置を構成する機能部に故障が発生しているか否かを自己診断することが可能となる。また、このように構成した角速度センサは、故障の自己診断を行うために追加の振動検出回路や特別な制御手段等を必要とせず、自己診断機能付きの角速度センサとして必要な構成手段の総数を抑えることで経年的故障リスクを低減することもできる。
【図面の簡単な説明】
【0024】
【図1】本願発明に係る角速度センサに適用可能な制御回路の構成を示すブロック図である。
【図2】本願発明に係る角速度センサに適用可能な制御回路の構成を示すブロック図である。
【図3】第1実施形態に係る角速度センサの構成を示す斜視図である。
【図4】図1に示す角速度センサにおける基部の拡大正面図である。
【図5】第1実施形態に係る角速度センサの駆動腕の基部との接続部近辺におけるX−Z平面断面図である。
【図6】第1実施形態に係る角速度センサの検出腕の基部との接続部近辺におけるX−Z平面断面図である。
【図7】第1実施形態に係る角速度センサの動作原理を示す斜視図である。
【図8】もれ振動のない理想的な仮想角速度センサにおける挙動を各動作モード毎に示す図である。
【図9】もれ振動のない理想的な仮想角速度センサにおける1サイクルの駆動腕の挙動を+Y方向から観察した模式的な上面図である。
【図10】もれ振動のない理想的な仮想角速度センサにおける1サイクルの駆動腕の挙動を+Y方向から観察した模式的な上面図である。
【図11】X方向のもれ振動を有する角速度センサにおける挙動を各動作モード毎に示す図である。
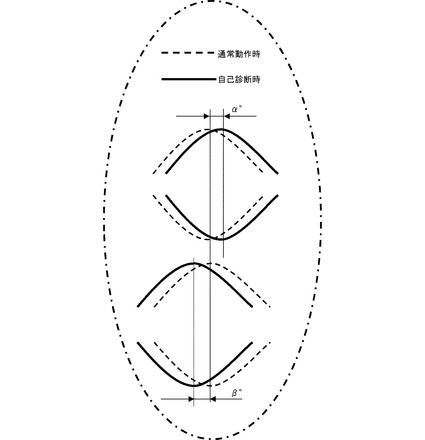
【図12】自己診断モードにおける左右の駆動腕に対する振動の印加のタイミングのずれ具合を示す波形の拡大図である
【図13】Z方向のもれ振動を有する角速度センサにおける挙動を各動作モード毎に示す図である。
【図14】Z方向のもれ振動を有する角速度センサにおける1サイクルの駆動腕の挙動を+Y方向から観察した模式的な上面図である。
【図15】Z方向のもれ振動を有する角速度センサにおける1サイクルの駆動腕の挙動を+Y方向から観察した模式的な上面図である。
【図16】第2実施形態に係る角速度センサの構成を示す正面図である。
【発明を実施するための形態】
【0025】
以下、本発明の実施の形態について図面を参照して詳細に説明する。なお、図面中、同一の要素には同一の符号を付し、重複する説明を省略する。また、上下左右等の位置関係は、特に断らない限り、図面に示す位置関係に基づくものとする。さらに、図面の寸法比率は、図示の比率に限定されるものではない。また、以下の実施の形態は、本発明を説明するための例示であり、本発明をその実施の形態のみに限定する趣旨ではない。さらに、本発明は、その要旨を逸脱しない限り、さまざまな変形が可能である。
【0026】
<第1実施形態>
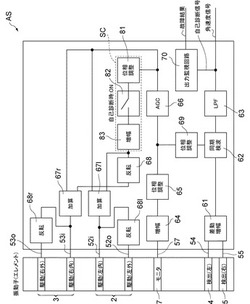
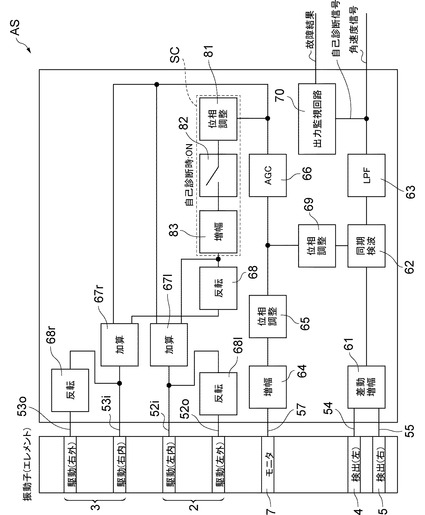
図1及び図2に示すのは、本実施形態に係る角速度センサに適用可能な、制御部AS(ASIC)の回路構成を示すブロック図である。制御部ASは、後述する角速度センサ1の接続パッド6の各端子と電気的に接続されており、自己診断モードを含む各動作モードにおいて、角速度センサ1の駆動腕2,3の駆動を制御し、検出腕4,5にて検出した検出振動を受信し、内部で信号処理した後、出力している。以下、図3乃至図16を参照しながら、制御部ASの動作原理を詳細に説明する。
【0027】
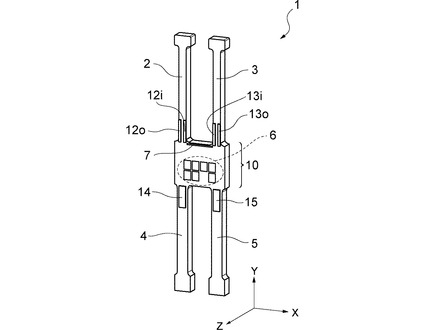
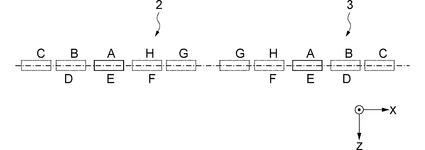
図3は、本発明の第1実施形態に係る角速度センサ1の構成の一例を示す斜視図である。なお、同図において、角速度センサ1は、紙面におけるX−Y平面内に延在しており、理解を容易にするべく厚さ(Z方向厚さ)を誇張して示している。この角速度センサ1は、中央に位置する基部10と、基部10を挟んで接続され、一方(図1では+Y方向)に延びる一対の駆動腕(左駆動腕2及び右駆動腕3)、及びその駆動腕とは反対側(図1では−Y方向)に延びる一対の検出腕(左検出腕4及び右検出腕5)を備える。
【0028】
基部10、一対の駆動腕2,3、一対の検出腕4,5から構成される角速度センサ1は、共通の材料(例えばシリコンや水晶)からなり、一般的なウェハ(シリコンウェハ等)のパターニング加工(MEMS加工)等によって一体に又は一括で形成することが可能である。
【0029】
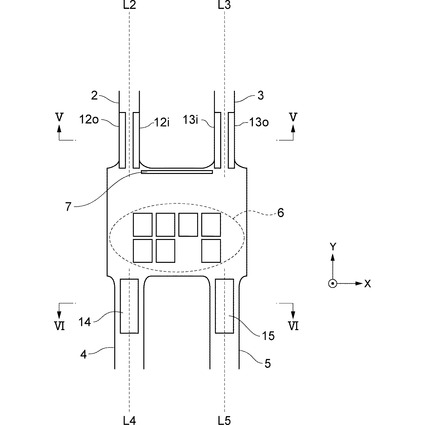
図4は、図3に示す角速度センサ1の基部10の拡大正面図である。各駆動腕2,3における基部10との接続部近辺では、左駆動腕2の表面に一対の駆動用圧電素子(駆動素子)12o,12iが、右駆動腕3の表面に一対の駆動用圧電素子13i,13oが設けられている。例えば左駆動腕2において、一対の駆動用圧電素子12o,12iは、左駆動腕2の延在方向(Y方向)に延びる仮想中心線L2を挟んで線対称となる位置に、外側駆動圧電素子12oと内側駆動圧電素子12iとして対向して設けられている。同様に右駆動腕3においては、一対の駆動用圧電素子13i,13oが、仮想中心線L3を挟んで線対称となる位置に、外側駆動圧電素子13oと内側駆動圧電素子13iとして対向して設けられている。
【0030】
次に、一対の検出腕4,5における基部との接続部近辺では、左検出腕4の表面を覆うように検出用圧電素子14が設けられ、右検出腕5の表面を覆うように検出用圧電素子15が設けられている。この検出用圧電素子14,15は、検出腕の延在方向(Y方向)に延びる左検出腕4の仮想中心線L4と、検出用圧電素子14の仮想中心線(図示せず)とが一致し、右検出腕5の仮想中心線L5と、検出用圧電素子15の仮想中心線(図示せず)とが一致するように配置されている。
【0031】
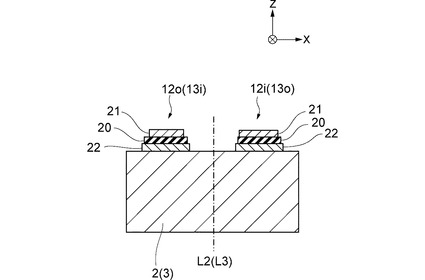
上述の圧電素子群はPZT(チタン酸ジルコン酸鉛)等の圧電材料から構成され得る。図5に示すのは、図3及び図4において示した駆動腕2,3と基部10との接続部近辺におけるX−Z平面断面図である(図4におけるV−V断面図)。図5に示すように、駆動用圧電素子12,13は、各々上部電極21及び下部電極22が圧電材料であるPZT20を挟みこむ三層構造をとっている。
【0032】
一般にPZTは、電圧の印加により自己伸縮する性質を有している。例えば、PZT20は、正の電圧を加えると長手方向に伸張し、負の電圧を加えると長手方向に収縮する。この性質を利用することで、各駆動用圧電素子12,13に対し上部電極21と下部電極22に対して交互に正負の電圧を印加することで、PZT20自体に伸張と収縮を繰り返させることができる。つまり、内側駆動用圧電素子12i,13iと外側駆動用圧電素子12o,13oに印加する電圧の正負及びタイミングを調整することで、駆動腕2,3を、駆動平面(X−Y平面)内でX方向に任意に振動させることが可能となる。例えば、本実施形態に係る角速度センサ1において、制御部ASが、左駆動腕2と右駆動腕3における内側駆動用圧電素子12i,13i、及び外側駆動用圧電素子12o,13oに対して、駆動腕2,3の内側と外側の各電極に対して同一周期で同種の電圧を印加すれば、左駆動腕2と右駆動腕3を駆動平面内でX方向に接近と離反を繰り返すように振動させることができる。
【0033】
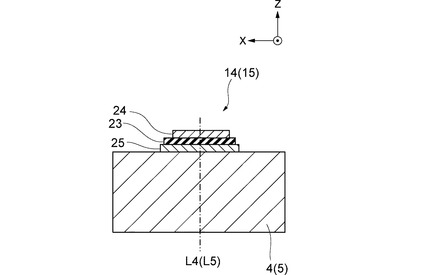
図6に示すのは、図3及び図4において示した検出腕4,5と基部10との接続部近辺におけるX−Z平面断面図である(図4におけるVI−VI断面図)。図5と同様、図6に示す検出腕4,5においても、検出用圧電素子14,15は、各々上部電極24及び下部電極25が圧電材料であるPZT23を挟みこむ三層構造をとっている。
【0034】
一般にPZTは、伸縮させることで電圧を生起させる性質も有している。例えば、PZT23は、長手方向に伸張すると正の電圧を生起し、長手方向に収縮すると負の電圧を生起する。この性質を利用することで、駆動腕2,3において生じたコリオリ力に起因した振動が基部10を介して検出腕4,5に伝搬し、検出用圧電素子14,15において当該振動変位によってPZTを伸縮させることができる。そして、PZT23の伸縮により生起した電荷が上部電極24及び下部電極25により検知され、振動検出信号として制御部ASへと送出され得る。
【0035】
なお、角速度センサ1は、図示していないセンサパッケージに対して基部10にて固定されており、同パッケージの内部空間に任意の方向で保持されている。また、図1及び図2に示すように、角速度センサ1には、基部10の上面に敷設された複数の接続パッド6を介して、ワイヤーボンディング等であってよい接続52,53,54,55,57等を用いた制御部ASに対する電気的な接続が与えられている。これら接続により、制御部ASは、角速度センサ1における駆動腕2,3の駆動・振動を制御し、検出腕4,5からの振動検出信号を受信することができる。
【0036】
ここで図1及び図2を参照すると、制御部ASによる左右の駆動腕2,3の実際の駆動は、図示していないドライブアンプからの駆動信号を接続52,53を介して駆動用圧電素子12,13へと伝達することで行なわれる。図4に示すモニタ電極7は、駆動腕2,3の実際の駆動振動を監視し、駆動腕2,3の駆動振動を一定の周期や振幅に保つために設けられるものである。制御部ASよりの命令で駆動する駆動腕2,3の駆動の周期やタイミングなどの情報は、モニタ電極7により検出され、接続パッド6より接続57を介して制御部ASへと送られた後増幅回路64により増幅され、位相調整回路65を通って、検出側の位相調整回路69を通った信号と共にオートゲインコントローラ66へと送られる。オートゲインコントローラ66は、駆動腕2,3の駆動が一定の周期となるように左右の駆動腕2,3各々への駆動信号を加算回路67l,67rにて微調整する。その後、制御部ASは、反転回路68l,68rにて腕の内側と外側とで信号を反転させ、ドライブアンプからの駆動信号を、接続52i,52o,53i,53oを介して駆動用圧電素子12,13へと伝達させる。このように、本実施形態に係る角速度センサの制御部ASは、駆動腕2,3の駆動を、接続52及び53を介してフィードバック制御するために用いられ得る。
【0037】
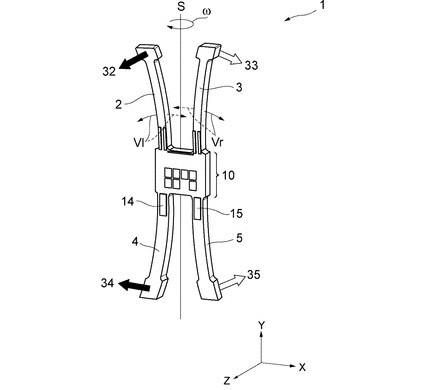
図7に示すのは、本実施形態に係る角速度センサ1の動作原理を示す斜視図である。角速度センサ1は、その通常モードにおいて、一対の駆動腕2,3を、双方が駆動平面内でX方向に接近と離反を繰り返すように振動させている(矢印Vl,Vr)。角速度センサ1の長手方向(Y方向)の中心軸S周りに回転角速度ωの時計回り回転運動が生じると、コリオリ力の式:F=2mvωで表されるコリオリ力32,33が発生する。このコリオリ力は、駆動腕2,3に印加されているX方向の速度方向及び回転の軸(Y方向)の双方に直交する方向、すなわち駆動平面に直交するZ方向に、回転角速度ωの大きさに比例した振幅(変位)として、駆動腕2,3内に生起しうる。そして、当該コリオリ力は、駆動腕2,3におけるZ方向の振動として具現化する。
【0038】
駆動腕2,3にて発生したZ方向の振動は、検出腕4,5に向かって基部10を伝搬し、検出腕4,5にてZ方向の検出振動34,35として現れる。そして、検出腕4,5における振動変位を検出用圧電素子14,15が検出することにより、角速度センサ1において生じた回転運動の回転角速度ωの回転の向き及び大きさが検出可能となる。
【0039】
1.もれ振動が存在しない場合
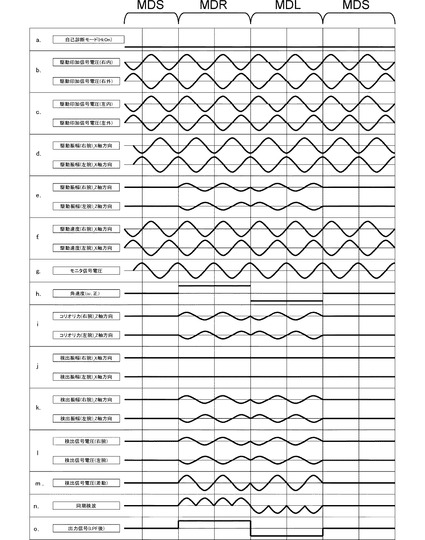
図8に示すのは、所謂もれ振動が存在しない理想的な仮想角速度センサ1’における挙動を各動作モード毎に示す図であり、具体的には各駆動腕2,3及び検出腕4,5の振動等の動き、発生するコリオリ力、検出振動・信号等の波形情報を示すグラフである。本図で示す仮想角速度センサ1’は通常モードMDにて動作しており、具体的には、通常モード(角速度無印加時)MDS、通常モード(時計回り角速度印加時)MDR及び通常モード(反時計回り角速度印加時)MDLと言うように、印加される加速度の状態に応じて3つの動作状態に区別されている。
【0040】
仮想角速度センサ1’は、通常モードにおいて、制御部ASから左右の駆動腕2,3上の内/外の駆動用圧電素子12,13に対して互いに同一周期、同一振幅且つ逆位相(一方の位相に対して他方の位相が180°遅れた/又は進んだ位相関係)の駆動信号が印加されている。なお本実施形態においては、仮想角速度センサ1’が、通常モード(角速度無印加時)MDSにて動作している(図8、b,c)。
【0041】
ここで図9は、理想的な仮想角速度センサ1’における1サイクルの駆動腕2,3の挙動を+Y方向から観察した模式的な上面図である。上述した仮想角速度センサ1’における通常モード(角速度無印加時)MDSでは、左右の駆動腕2,3がAからHの順で駆動平面内にてX方向に接近と離反を繰り返すように駆動振動している。なお、駆動腕は共振モードで振動しており、実際の振動は図8、b,cに示す駆動信号から90°遅れた位相となる(図8、d)。なお、本実施例においては、左右の駆動腕2,3の振動が基部10へと伝搬し基部10が振動することで、駆動腕2,3の振動に対応する電気信号がモニタ電極7より接続57を介して制御部ASに送られる。例えば、本実施形態では、モニタ信号が実際の左駆動腕2の動きと同位相となるようにモニタされているが(図8、d,g)、左駆動腕2の動きを逆位相でモニタしても良く、また右駆動腕3の動きをモニタすることも可能である。
【0042】
この仮想角速度センサ1’においては後述の駆動用圧電素子12,13の配置等に起因したもれ振動が生じ得ないので、本モードにおける両駆動腕2,3のZ方向振幅はゼロである(図8、e)。また通常モード(角速度無印加時)MDSでは、仮想角速度センサに1’対してY軸周りの回転が加わっていない(図8、h)ので、当然コリオリ力も発生しない。よって、コリオリ力やもれ振動に関連する振動を検出する検出腕4,5での信号波形等も全て0である(図8、i―o)。
【0043】
通常モード(時計回り角速度印加時)MDRでは、左右の駆動腕2,3が駆動平面内にてX方向に接近と離反を繰り返すように駆動振動している状態で仮想角速度センサ1’に対してY軸周りに時計回りの回転角速度ωが印加され(図8、h)、その回転量に応じたコリオリ力が駆動腕2,3に対してZ方向に生じる。ここで、左右の駆動腕2,3は、同一周期、同一振幅、且つ逆位相、すなわちX方向逆向きに振動しているので、左右の駆動腕には、各々同量かつ逆向きのコリオリ力がZ方向に印加される(図8、i)。つまり、コリオリ力が印加された左右の駆動腕2,3は、駆動腕のZ方向にのみ着目すると、同一周期、同一振幅、且つ逆位相、すなわちZ方向逆向きのバタ足挙動をしている(図8、e)。
【0044】
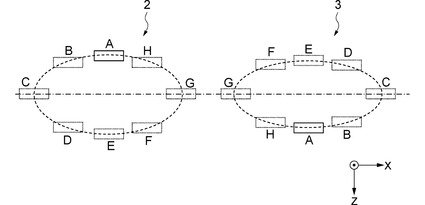
ここで図10は、理想的な仮想角速度センサ1’における1サイクルの駆動腕2,3の挙動を+Y方向から観察した模式的な上面図である。通常モード(時計回り角速度印加時)MDRでは、図9の仮想角速度センサ1’における駆動腕2,3の駆動と同様に、左右の駆動腕2,3がX方向に接近と離反を繰り返すように駆動振動することに加え、コリオリ力に起因するZ方向の振動が印加されている。従って、通常モード(時計回り角速度印加時)MDRにおける左右の駆動腕2,3は、双方がX方向に接近と離反を繰り返す挙動とZ方向にバタ足をする挙動とがミックスされた、AからHの順で示された楕円軌道で逆方向に回転動作する。
【0045】
図7において示したように、本実施形態に係る仮想角速度センサ1’は、左駆動腕2と左検出腕4がZ方向において同相で振動し、右駆動腕3と右検出腕5がZ方向において同相で振動するので、上下に対応する駆動腕2,3と検出腕4,5とが弓なりになるように動作する。つまり、左右の駆動腕2,3のZ方向の同周期、同振幅、且つ逆位相の振動は、基部10を介して、検出腕4,5へとZ方向の同周期、同振幅、且つ逆位相の振動として伝達され(図8、k)、これにより検出電極での左右の振動も同周期、同振幅且つ逆位相となる(図8、l)。
【0046】
検出腕4,5にて検出された信号は、接続パッド6から接続54,55を介して取り出されて制御部ASへと送られ、制御部AS内の差動増幅回路61にて差分増幅され(図8、m)、同期検波回路62にて、差動増幅された信号を、モニタ信号を90°位相をずらした信号で同期検波62した後(図8、n)、ローパスフィルタ63で平滑化を行い、角速度信号として出力されている(図8、o)。
【0047】
通常モード(反時計回り角速度印加時)MDLでは、左右の駆動腕2,3が駆動振動している仮想角速度センサ1’に対してY軸周りに反時計回りの回転角速度−ωが印加され、(図8、h)、その回転量に応じたコリオリ力が駆動腕2,3に対してZ方向に生じる。この場合、生じるコリオリ力は、通常モード(時計回り角速度印加時)MDRにおける方向とは180°逆の方向となる(図8、e,i)。同様に、左右の駆動腕2,3から基部10を介して、検出腕4,5へと伝搬される信号も通常モード(時計回り角速度印加時)MDRにおける方向とは180°逆の方向となる(図8、k,l)。
【0048】
通常モード(反時計回り角速度印加時)MDLで検出腕4,5にて検出された信号は、通常モード(時計回り角速度印加時)MDRと同様に、接続パッド6から接続54,55を介して制御部ASへと送られ、制御部AS内の差動増幅回路61にて差分増幅され(図8、m)、同期検波回路62にて差動増幅された信号を、モニタ信号を90°位相をずらした信号で同期検波した後(図8、n)、ローパスフィルタ63で平滑化を行い、角速度信号として出力されている。しかし、最終的な出力信号は、通常モード(時計回り角速度印加時)MDRにおける回転方向とは180°逆の方向であることが判る(図8、o)。
【0049】
次に、仮想角速度センサ1’に対するY軸周りの回転の印加が無くなると、仮想角速度センサ1’は、再び通常モード(角速度無印加時)MDSにて動作する。
【0050】
以上説明したとおり、駆動腕2,3で生起したコリオリ力のみが検出腕4,5で検出されることが理想ではあるが、実際には角速度センサ1の加工精度の不完全さ等に起因した機械的もれ振動が検出腕4,5にて検出されることは避けられない。また、もれ振動は、非常に微弱な振動であるコリオリ力に起因した振動と比して振幅が大きい。このようなもれ振動には、駆動腕2,3のX方向の振動が検出腕4,5に伝搬してしまうX方向のもれ振動、及び駆動腕2,3にコリオリ力以外のZ方向の振動が生じるZ方向のもれ振動が存在する。以下に、各もれ振動における角速度センサの自己診断方法を説明する。
【0051】
2.X方向のもれ振動の場合
一般的な音叉型の角速度センサの設計においては、駆動腕のX方向の振動が検出腕側にもれてしまったとしても、検出腕における検出用圧電素子を検出腕の中心線に対して左右対称となるように設けることで、当該もれ振動を相殺するようにしている。具体的には、そのような振動のもれが生じたとき、例えば圧電素子の左側の伸張と右側の収縮とが同一となるようにバランスが保たれ、一枚の検出用圧電素子としてもれ振動を相殺し、ノイズとなり得る電荷を発生させないような設計がなされている。
【0052】
しかしながら、極めて微小な検出用圧電素子の延在方向に対する中心線を検出腕の中心線と完全に合致させることは、製造上困難である。また、ある一本の検出腕にて、腕自体の中心線と腕に加えられる振動の振動中心線とが完全に一致する場合にのみ完全な電荷の相殺となり得るが、音叉型の角速度センサは各腕に対して、腕を固定・支持する基部が左右対称の形状とは成り得ないので、腕の中心線と振動中心線とは常にずれている。よって、音叉型の角速度センサにおいて、応力のバランスを保つことは困難であり、音叉型角速度センサにおいてX方向のもれ振動の生起を有効に禁止することは極めて困難である。
【0053】
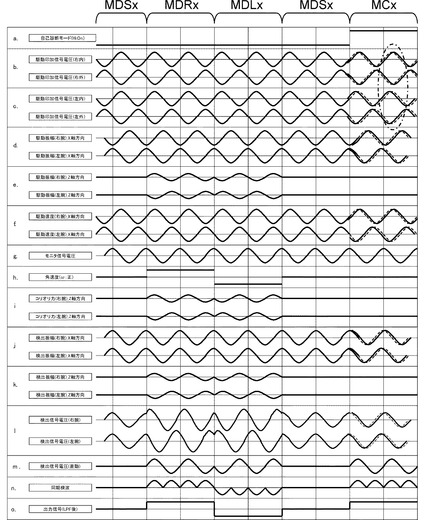
図11に示すのは、X方向のもれ振動を生起してしまう角速度センサ1における挙動を各動作モード毎に示す図であり、具体的には各駆動腕2,3及び検出腕4,5の振動等の挙動、発生するコリオリ力、検出振動・信号等の波形情報を示すグラフである。本図で示す角速度センサ1の動作モードは、通常モード(角速度無印加時)MDSx、通常モード(時計回り角速度印加時)MDRx、通常モード(反時計回り角速度印加時)MDLxの3つからなる通常モードMDx、及び自己診断モードMCxである。なお、以下の説明においては、上述したもれ振動のない理想的な仮想角速度センサ1’における説明と重複する説明部分については、特に詳しくは言及していない。
【0054】
角速度センサ1は、通常モードにおいて、制御部ASから左右の駆動腕2,3上の内/外の駆動用圧電素子12,13に対して互いに同一周期、同一振幅且つ逆位相(一方の位相に対して他方の位相が180°遅れた/又は進んだ位相関係)の駆動信号が印加されている。なお本実施形態においては、角速度センサ1が、通常モード(角速度無印加時)MDSxにて動作している(図11、b,c)。しかしながら、通常モード(角速度無印加時)MDSxで本角速度センサ1が起動される場合、先に述べた理想的な仮想角速度センサ1’とは異なり、X方向のもれ振動が生じて、検出腕4,5がX方向に振動する。なお、本実施形態に係る角速度センサ1は、駆動腕2,3より基部10を介して伝搬するもれ振動に起因した検出腕4,5での振動が同位相の振動となる(図11、j)ように素子設計がなされているが、もれ振動に起因した検出腕4,5での振動が逆位相の振動となるような素子設計がなされてもよい。本実施形態に係る角速度センサ1は、もれ振動に起因した検出腕4,5での振動が完全には同位相又は逆位相状態とならない場合であっても有効である。
【0055】
通常モード(角速度無印加時)MDSxでは、角速度センサ1に対してY軸周りの回転が加わっていない(図11、h)ので、当然コリオリ力も発生しておらず、コリオリ力やZ方向のもれ信号を検出する検出腕4,5でのZ方向の振動は検出され得ない(図11、i)。また、検出信号の差動増幅出力は左右の検出信号の差分となるが、上述のとおり左右の検出信号はX方向においては同位相(図11、j)、且つZ方向においては0(図11、k)なので、獲得される差動出力は結果的に0となる(図11、m,o)。
【0056】
通常モード(時計回り角速度印加時)MDRxでは、左右の駆動腕2,3が駆動平面内でX方向に接近と離反を繰り返すように駆動振動している状態で角速度センサ1に対してY軸周りに時計回りの回転角速度ωが印加され、その回転量に応じたコリオリ力が駆動腕2,3に対してZ方向に生じる。ここで、左右の駆動腕2,3は、同一周期、同一振幅、且つ逆位相、すなわちX方向逆向きに振動しているので、各々同量かつ逆向きのコリオリ力がZ方向に印加される(図11、i)。つまり、コリオリ力が印加された左右の駆動腕2,3は、駆動腕のZ方向にのみ着目すると、同一周期、同一振幅、且つ逆位相すなわちZ方向逆向きのバタ足挙動をしている(図11、e)。
【0057】
本モードでは、通常モード(角速度無印加時)MDSxと同様の駆動腕2,3における上記コリオリ力に起因したZ方向の振動に加えて、X方向のもれ振動も検出腕4,5へと伝搬している。よって、検出腕4,5にて検出されるのは、Z方向の同周期、同振幅、且つ逆位相の振動(図11、k)だけでなく、通常モード(角速度無印加時)MDSxで検出されたものと同じ、同周期、同振幅、且つ同位相のX方向のもれ振動である(図11、j)。
【0058】
先に述べたように、検出腕4,5におけるX方向の振動は同相である(図11、j)ので、差動増幅によってキャンセルされる。一方で、検出腕4,5におけるコリオリ力に起因したZ方向の振動は逆相である(図11、k)ので、最終的に検出腕4,5の差動出力として出力されるのはZ方向成分のみである(図11、m)。なお、本モードにおいても、差動増幅回路61にて差分増幅された信号(図11、m)は、同期検波回路62にて、モニタ信号を90°位相をずらした信号で同期検波され(図11、n)、検出信号は最終的にローパスフィルタ63で平滑化して角速度信号として出力されている(図11、o)。
【0059】
通常モード(反時計回り角速度印加時)MDLxでは、駆動腕2,3に対してZ方向に生じる回転量に応じたコリオリ力及び検出腕4,5へと伝搬される信号が通常モード(時計回り角速度印加時)MDRxにおける方向とは180°逆の方向となり(図11、k,l)、最終的な出力信号が、通常モード(時計回り角速度印加時)MDRxにおける回転方向とは180°逆の方向となる。このモードにおいても、検出腕4,5におけるX方向の振動は同位相であり(図11、j)、検出腕4,5におけるZ方向の振動は逆位相である(図11、k)ので、最終的に検出腕4,5の差動出力として出力されるのはZ方向成分のみであり(図11、m)、検出信号は最終的にローパスフィルタ63で平滑化して出力されている(図11、o)。
【0060】
次に、角速度センサ1に対するY軸周りの回転の印加が無くなると、角速度センサ1は、再び通常モード(角速度無印加時)MDSxにて動作する。
【0061】
図11に示す自己診断モードMCx(図11、a)は、例えば角速度センサ1の起動時やスタンバイ状態時等、実際に角速度センサ1で回転角速度ωを検知していない時に、実用上問題とならない程度の短時間に、任意に実行可能なアクティブなモードである。この自己診断モードMCxを用いることで、工場出荷状態等の初期的な故障が無い状態で角速度センサ1を自己診断モードMCxで駆動させて得られる初期自己診断信号と、角速度センサ1の利用開始後実際に測定された自己診断信号とを比較することのみで、角速度センサ及び/又はそれらに設けられた駆動用圧電素子個々の破損又は故障、並びに回路の短絡や信号線等の断線等といった様々な不具合の発生の有無を検知することが可能である。また、自己診断モードMCxを活用することで、動作不良及び機能低下といった角速度センサに生じた不具合を迅速且つ精確に判定し、角速度センサ或いはそれが設けられたセンサパッケージの交換を迅速に行ったり、保守時期等の指標とすることができる。
【0062】
図12に示すのは、自己診断モードMCxにおける左右の駆動腕2,3に対する振動の印加のタイミングのずれを示す波形の拡大図である(この拡大図は、図11、b,cに対応している)。ここに示すように、自己診断モードMCxでは、他のモードにおいて逆位相状態にある双方の駆動腕2,3において、一方の駆動腕に対して+α°ずれた(α°早い)駆動振動を印加し、他方の駆動腕に対しては−β°ずれた(β°遅い)駆動信号を印加することを特徴としている。すなわち、左駆動腕2と右駆動腕3とをそれぞれ同一周期及び同一振幅で、且つ左駆動腕2と右駆動腕3の振動位相が逆位相からずれつつ同位相とはならないように、制御部ASが左駆動腕2と右駆動腕3の駆動振動を制御している。
【0063】
自己診断モードMCxにおける制御部ASによる駆動腕2,3の駆動制御は、図1に示すようにコリオリ検出用の制御部ASに自己診断用ブロックSCを追加するだけで良い。具体的には、オートゲインコントローラ66を通過した信号の一部が、位相調整回路81を通過した後に、自己診断モードMCxの起動スイッチ82へと向う。自己診断モードMCxがオンの場合(図11、a)、増幅回路83にて+α°ずれた駆動振動に対応する信号が生成され、分岐させた後に一方の信号を反転回路68にて反転させて、左右の駆動腕2,3の各々へ駆動信号を加算回路67へと送出する。例えば、図1の制御回路では、左駆動腕2に対して+α°ずれた(α°早い)駆動振動を印加し、右駆動腕3に対しては−α°ずれた(α°遅い)駆動信号を生起させることができる。なお、反転回路68を設けずに、異なるタイミングの駆動振動を印加するために左駆動腕用の増幅回路と右駆動腕用の増幅回路を個別に設けても良い。
【0064】
また、図2に示す制御部ASの別実施形態のように、加算回路67が左駆動腕2にのみ接続されるようにしても良い。この場合、右駆動腕3の駆動振動は全てのモードで終始固定されたままであり、左駆動腕2に対してのみ、オートゲインコントローラ66によるフィードバック制御、並びに自己診断モードMCxにおける+α°ずれた(α°早い)駆動振動の印加を行うこともできる。このように、自己診断モードMCxにおいては、双方の駆動腕2,3における振動が逆位相の状態から互いにずれていればよい。
【0065】
上述のような駆動タイミングの「ずれた」制御信号を双方の駆動腕2,3に与えることにより、駆動腕2,3はX方向のもれ振動に対して振動タイミングのずれを付与することができる。すなわち、他モードでは検出腕4,5において同位相の振動として検出され得るX方向の検出信号においても、積極的に左右の検出腕4,5の間で位相ずれを生じさせることができる。なお、本モードでは角速度センサに対してY軸周りの回転が加わっていない(図11、h)ので、駆動腕2,3においてコリオリ力は発生しておらず、検出腕4,5ではZ方向の振動が検出されることはない。
【0066】
このように、X方向の検出信号にずれを生じさせることで、本モードでは、X方向の振動(もれ振動)成分についても差動振動を取得することが可能となる(図11、m)。つまり、自己診断モードMCxでは、通常モードと同様に、検出腕4,5にて検出された信号が制御部AS内の差動増幅回路61にて差分増幅され(図11、m)、同期検波回路62にて差動増幅された信号を、モニタ信号を90°位相をずらした信号で同期検波した後(図11、n)、検出信号をローパスフィルタ63で平滑化して自己診断信号として出力する(図11、o)ことが可能となる。
【0067】
本実施形態に係るX方向のもれ振動を有する角速度センサ1は、製品出荷時の正常状態で、自己診断モードで駆動させて出力される初期的な自己診断信号(図11、o)を例えばメモリ等の記憶手段に記憶した出力監視回路(判定回路)70を備えている。当該出力監視回路70は、初期的な自己診断信号に対して様々な故障状況に応じた閾値等の条件を設定し、実際の自己診断信号と初期的な自己診断信号とを比較する。そして、当該閾値から自己診断信号の値が外れる場合や、特定の故障状態に対応する自己診断信号が検知された場合に異常フラグを発生させて、外部に故障判定結果と通知することが可能となる。
【0068】
このように、本願発明におけるX方向のもれ振動を有する角速度センサ1は、故障検出の為に専用の回路構成を追加的に設ける必要はなく、通常の角速度検出用の制御部ASを用いて駆動腕2,3の振動タイミングをずらして駆動させるだけで角速度センサや圧電素子の破損又は故障、及び/又は回路の短絡や信号線等の断線といった不具合の発生の有無を精確に把握することができ、角速度センサの故障を判定する自己診断を簡便に行うことが可能である。
【0069】
3.Z方向のもれ振動の場合
一般的な音叉型の角速度センサの設計において、駆動腕2,3は、X方向の駆動振動をするための駆動用圧電素子12,13を有するのみであり、Z方向の振動を印加することは一切考慮されていない。しかしながら、図5において示したように、駆動用圧電素子12,13がシリコン製の駆動腕2,3の表面にのみ配置されているので、駆動腕2,3の表面と裏面との間で、駆動腕2,3の厚み方向の動きむらが生じ、微小ではあるがX方向以外のZ方向の振動を生起することは回避できない。
【0070】
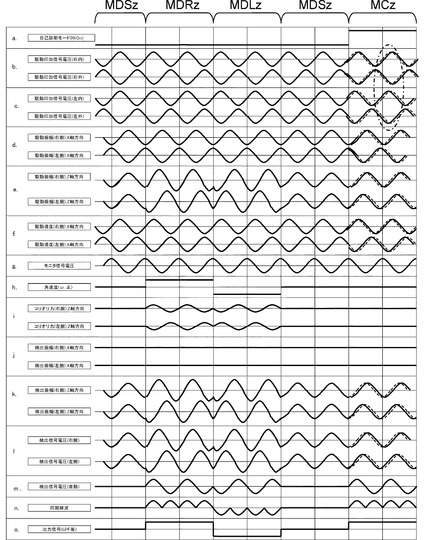
図13に示すのは、Z方向のもれ振動を生起してしまう角速度センサ1における挙動を各動作モード毎に示す図であり、具体的には各駆動腕2,3及び検出腕4,5の振動等の挙動、発生するコリオリ力、検出振動・信号等の波形情報を示すグラフである。本図で示す角速度センサの動作モードは、通常モード(角速度無印加時)MDSz、通常モード(時計回り角速度印加時)MDRz、通常モード(反時計回り角速度印加時)MDLzの3つからなる通常モードMDz、及び自己診断モードMCzである。なお、以下の説明においては、もれ振動のない理想的な仮想角速度センサ1’及びX方向のもれ振動を有する角速度センサ1における上記説明と重複する説明部分については、特に詳しくは言及していない。
【0071】
角速度センサ1は、通常モードにおいて、制御部ASから左右の駆動腕2,3上の内/外の駆動用圧電素子12,13に対して互いに同一周期、同一振幅且つ逆位相(一方の位相に対して他方の位相が180°遅れた/又は進んだ位相関係)の駆動信号が印加されている。なお本実施形態においては、角速度センサ1が、通常モード(角速度無印加時)MDSzにて動作している(図13、b,c)。しかしながら、通常モード(角速度無印加時)MDSzで本角速度センサ1が起動される場合、先に述べた理想的な角速度センサ1’等とは異なり、駆動用圧電素子12,13の駆動腕2,3の表面への配置に起因したZ方向のもれ振動が生じて、検出腕4,5がZ方向にわずかに振動する。本実施形態に係る角速度センサ1は、駆動腕2,3にて実際に生じるZ方向の振動が左右とも同位相であり(図13、e)、駆動腕2,3より基部10を介して伝搬するもれ振動に起因した検出腕4,5でのZ方向振動も同様に同位相の振動となる(図13、k)ように素子設計がなされているが、例えばもれ振動に起因した検出腕4,5での振動が逆位相の振動となるような素子設計もまた可能である。加えて、本実施形態に係る角速度センサ1は、もれ振動に起因した検出腕4,5での振動が、完全には同位相又は逆位相状態とならない場合であっても有効である。
【0072】
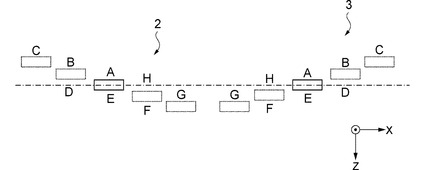
ここで図14は、Z方向のもれ振動を有する角速度センサ1における1サイクルの駆動腕2,3の挙動を+Y方向から観察した模式的な上面図である。この角速度センサ1における通常モード(角速度無印加時)MDSzでは、左右の駆動腕2,3が、AからHの順で双方がX方向に接近と離反を繰り返す振動と、AからHの順で双方が同位相でZ方向に駆動する振動とがミックスされており、結果的に斜め直線方向に反復振動していることが判る。なお、駆動腕2,3及び検出腕4,5は共振モードで振動しており、実際の振動は図13、b,cに示す駆動信号から90°遅れた位相となる(13,d,e)。
【0073】
通常モード(角速度無印加時)MDSzでは、角速度センサに対してY軸周りの回転が加わっていない(図13、h)ので、当然コリオリ力も発生しておらず、ここではX方向のもれ信号も考慮していないので、検出腕4,5ではZ方向のもれ振動のみが検出される(図13、k)。検出信号の差動増幅出力は左右の検出信号の差分となるが、上述のとおり左右の検出信号はZ方向において同位相(図13、k)、且つX方向においては0(図13、j)なので、獲得される差動出力は結果的に0となる(図13、m,o)。
【0074】
通常モード(時計回り角速度印加時)MDRzでは、左右の駆動腕2,3がX方向に接近と離反を繰り返すように駆動振動している状態で角速度センサ1に対してY軸周りに時計回りの回転角速度ωが印加され(図13、h)、その回転量に応じたコリオリ力が駆動腕2,3に対してZ方向に生じる。ここで、左右の駆動腕2,3は、同一周期、同一振幅、且つ逆位相すなわちX方向逆向きに振動しているので、左右の駆動腕2,3には、各々同量かつ逆向きのコリオリ力がZ方向に印加される(図13、i)。ここでもやはり、コリオリ力が印加された左右の駆動腕2,3は、駆動腕のZ方向にのみ着目すると、同一周期、同一振幅、且つ逆位相すなわちZ方向逆向きのバタ足挙動をしようとする(図13、i)。
【0075】
しかしながら、上述のとおり駆動腕2,3には同一周期、同一振幅、且つ同位相のZ方向のもれ振動も存在しているので、これら二つのZ方向振動が駆動腕2,3において混在している(図13、e)。
【0076】
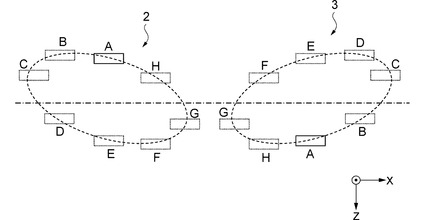
ここで図15は、Z方向のもれ振動を有する角速度センサ1における1サイクルの駆動腕2,3の挙動を+Y方向から観察した模式的な上面図である。通常モード(時計回り角速度印加時)MDRzでは、図15において示された様に左右の駆動腕2,3がX方向に接近と離反を繰り返す駆動振動に加え、上述したZ方向のもれ振動と、コリオリ力に起因するZ方向の振動との3つの振動が混在している。従って、Z方向のもれ振動を有する角速度センサ1における通常モード(時計回り角速度印加時)MDRzでの左右の駆動腕2,3は、図15において示されるように、AからHの順で示され斜め方向に歪んだ楕円軌道で逆方向に回転動作する。なお、この斜め方向に歪んだ楕円軌道の回転動作には、バタ足挙動を包含するコリオリ力に起因するZ方向の振動がミックスされているので、左右の駆動腕2,3の動きはZ方向において逆位相となっている。
【0077】
通常モード(時計回り角速度印加時)MDRzでは、駆動腕2,3におけるZ方向のもれ振動と、コリオリ力に起因するZ方向の振動が混在した振動が基部10を介して伝搬し、検出腕4,5にて検出されている(図13、k)。この2つのZ方向成分がミックスされた検出信号のうち、先に述べたように、同位相成分(図13、e)であるもれ振動は差動増幅によってキャンセルされる。一方で、コリオリ力に起因するZ方向の振動成分は逆位相であるので(図13、i)、最終的に検出腕4,5の差動出力として出力されるのはコリオリ力に起因するZ方向成分のみである(図13、m)。差動増幅された信号はモニタ信号を90°位相をずらした信号で同期検波された後、最終的にローパスフィルタ63で平滑化して角速度信号として出力されている(図13、n,o)。
【0078】
通常モード(反時計回り角速度印加時)MDLzでは、駆動腕2,3に対してZ方向に生じる回転量に応じたコリオリ力及び検出腕4,5へと伝搬される信号が通常モード(時計回り角速度印加時)MDRzにおける方向とは180°逆の方向となり(図13,k,l)、最終的な出力信号が、通常モード(時計回り角速度印加時)MDRzにおける回転方向とは180°逆の方向となる。このモードにおいても、同位相成分(図13、e)であるZ方向のもれ振動は差動増幅61によってキャンセルされ、逆相であるコリオリ力に起因するZ方向の振動成分(図13、i)のみが、差動出力として出力される(図13、m)。信号は同期検波された後、最終的にローパスフィルタ63で平滑化して角速度信号として出力されている(図13、n,o)。
【0079】
次に、角速度センサ1に対するY軸周りの回転の印加が無くなると、角速度センサ1は、再び通常モード(角速度無印加時)MDSzにて動作する。
【0080】
自己診断モードMCz(図13、a)は、例えば角速度センサ1の起動時やスタンバイ状態等、実際に角速度センサ1で回転角速度ωを検知していない時に、実用上問題とならない程度の短時間に任意に実行可能である。Z方向のもれ振動を有する角速度センサ1における自己診断モードMCzによる角速度センサ1の不具合検知の方法等は、上述したX方向のもれ振動を有する角速度センサ1のそれと同様である。
【0081】
Z方向のもれ振動を有する角速度センサ1においても、自己診断モードMCzにおける左右の駆動腕2,3に対する振動の印加のタイミングのずれは、図12に示したものと同様である(図13、b,cと、図12とが対応している)。ここでも、左駆動腕2と右駆動腕3とをそれぞれ同一周期及び同一振幅で、且つ左駆動腕2と右駆動腕3の振動位相が逆位相からずれつつ同位相とはならないように、制御部ASが左駆動腕2と右駆動腕3の駆動振動を制御している。
【0082】
このようなタイミングの「ずれた」X方向駆動振動を双方の駆動腕2,3に与えることにより、駆動腕2,3のZ方向のもれ振動に対して振動のタイミングのずれを与えることができる。すなわち、他モードでは検出腕4,5において同位相の振動として検出されるZ方向のもれ振動においても、積極的に左右の検出腕4,5の間に位相ずれを生じさせることができる。なお、本モードでは角速度センサ1に対してY軸周りの回転が加わっていない(図13、h)。よって、駆動腕2,3においてコリオリ力は発生しておらず、コリオリ力に起因するZ方向の回転振動は存在しない。すなわち本モードでは、動作タイミングのずれ(位相のずれ)を含むZ方向のもれ振動のみが検出腕4,5にて検出される(図13,k,l)。なお、検出腕4,5にてX方向の振動が検出されることはない(図13、j)。
【0083】
このように、X方向の検出信号にずれを生じさせることで、本モードでは、Z方向のもれ振動成分についても差動振動を取得する可能となる(図13、m)。つまり、自己診断モードMCzでは、通常モードと同様に、検出腕4,5にて検出された信号が制御部AS内の回路にて差動増幅され(図13、m)、差動増幅された信号を、モニタ信号を90°位相をずらした信号で同期検波した後(図13、n)、ローパスフィルタ63で平滑化して自己診断信号として出力する(図13、o)ことが可能となる。
【0084】
上述したX方向のもれ振動を有する角速度センサ1を用いた自己診断モードMCxと同様に、Z方向のもれ振動を有する角速度センサ1も、製品出荷時の正常状態で、自己診断モードで駆動させて出力される初期的な自己診断信号(図13、o)を例えばメモリ等の記憶手段に記憶した、出力監視回路(判定回路)70を備えている。当該出力監視回路70は、初期的な自己診断信号に対して様々な故障状況に応じた閾値等の条件を設定し、実際の自己診断信号と初期的な自己診断信号とを比較し、当該閾値よりから自己診断信号の値が外れる場合や、特定の故障状態に対応する自己診断信号が検知された場合に異常フラグを発生させて、外部に故障判定結果と通知することが可能となる。
【0085】
本願発明におけるZ方向のもれ振動を有する角速度センサ1もまた、故障検出の為の専用回路構成を追加的に設ける必要はなく、通常の角速度検出用の制御部ASを用いて駆動腕2,3の振動タイミングをずらして駆動させるだけで角速度センサや圧電素子の破損又は故障、及び/又は回路の短絡や信号線等の断線といった不具合の発生の有無を精確に把握することができ、簡便に角速度センサの故障を判定する自己診断を行うことが可能である。
【0086】
4.X方向のもれ振動とZ方向のもれ振動が混在する場合
一般的な音叉型角速度センサの設計においては、上述のとおり駆動腕のX方向駆動振動が検出腕側にもれてしまうことが避けられず(X方向のもれ振動)、駆動腕にX方向以外の振動が生起することもまた避けられない(Z方向のもれ振動)。よって、上述したX方向のもれ振動及びZ方向のもれ振動は、角速度センサ1において何れか一方のみが存在し得るものではなく、双方が混在している状態で存在する。
【0087】
しかしながら、本願に係る自己診断モードで作動する角速度センサを用いれば、上述のとおり駆動腕におけるX方向及びZ方向の駆動振動に位相差を設けていることで、検出信号からX方向及びZ方向の合成の差動出力を取り出すことも可能であり、それを故障の自己診断に用いるべく自己診断信号として出力することが可能である。またさらに、この診断に用いる振動検出回路には、コリオリ力検出に用いる角速度検出用の制御部ASをそのまま流用することが可能であり、高い故障検知能力を有しつつ、角速度センサの構成を簡便にすることで故障等のリスクを大幅に低減することができる。
【0088】
<第2実施形態>
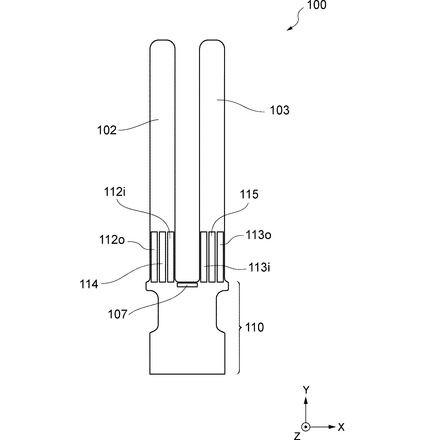
図16に示すのは、本発明の第2実施形態に係る角速度センサ100(角速度センサ)の構成の一例を示す正面図である。この角速度センサ100は、基部110と、基部110の上辺から(図11では+Y方向)に延びる一対の駆動検出腕(左駆動検出腕102及び右駆動検出腕103)を備える。このようなU字型角速度センサ100においては、駆動用圧電素子112,113及び検出用圧電素子114,115が同一の音叉型振動子に設けられており、角速度センサ面積を低減することが可能であり、角速度センサのさらなる小型化が可能となる。また、駆動腕と検出腕が同一であることで、駆動腕に生じたコリオリ力に起因する振動をより直接的に検知することが可能となる。
【0089】
この第2実施形態に係るU字型の角速度センサ100においても、X方向及びY方向のもれ振動が生じるメカニズムは第1実施形態のそれと同一である。つまり、本実施形態に係るX方向及びZ方向のもれ振動を有する角速度センサ100は、初期的に故障がない状態で、自己診断モードMCにおいて獲得される初期的な自己診断信号に、様々な故障状況に応じた閾値等の条件を設定することで、当該閾値より自己診断信号が外れる場合や、特定の故障状態に対応する自己診断信号が検知された場合に異常フラグを発生させて、外部に故障判定結果と通知することが可能である。結果として、本願発明におけるX方向及びZ方向のもれ振動を有するU字型角速度センサ100は、故障検出の為の専用回路構成を追加的に設ける必要はなく、駆動検出腕102,103の動作タイミングをずらすことだけで、通常の角速度検出用の制御部ASを用いた角速度センサ100の故障の自己診断を行うことが可能である。
【0090】
なお、本発明は、上記の各実施形態に限定されるものではなく、先に述べたとおり、本発明の要旨を逸脱しない範囲で、種々の変更(例えば、各実施形態の内容の適宜な組み合わせ等)が可能である。例えば、本発明における自己診断は、一定の角速度ωが印加されている状態であれば、通常モードと自己診断モードの出力の差分をとることで実行可能である。またさらに、駆動腕及び検出腕の表面に設けられるものと同一の振動素子を各腕の表面のみならず裏面に、同様の配置法則をもって設けることも可能である。このように構成した角速度センサであれば、駆動腕における表裏面間の動きむらを最小限に抑えて角速度センサのノイズとなり得るもれ振動を低減させつつ、センサの感度を向上させることも可能である。しかも、表裏両面の圧電薄膜素子の位置を精確に保つことは製造上極めて困難であるので、この場合であっても微小ではあるが角速度センサにおけるもれ振動を生起することは避けられないと考えられる。よって、この両面振動素子構成を有する角速度センサは、本願発明にかかる自己診断モードで動作可能である。
【符号の説明】
【0091】
1,100…角速度センサ、1’…仮想角速度センサ、2…左駆動腕、3…右駆動腕、4…左検出腕、5…右検出腕、6…接続パッド、7…モニタ電極、10…基部、12,13,112,113…駆動用圧電素子、14,15,114,115…検出用圧電素子、21,23…上部電極、22,24…下部電極、32,33…コリオリ力、34,35…検出振動、52,53,54,55,57…接続、61…差動増幅回路、62…同期検波回路、63…ローパスフィルタ、64…増幅回路、65…位相調整回路、66…オートゲインコントローラ、67…加算回路、68…反転回路、69…位相調整回路、70…出力監視回路、81…位相調整回路、82…起動スイッチ、83…増幅回路、102…左駆動検出腕、103…右駆動検出腕、110…基部、AS…制御部、MD…通常モード、MDS…通常モード(角速度無印加時)、MDR…通常モード(時計回り角速度印加時)、MDL…通常モード(反時計回り角速度印加時)、MC…自己診断モード、SC…自己診断用ブロック、L2,L3,L4,L5…仮想中心線、S…中心線、ω…回転角速度、V…矢印。
【技術分野】
【0001】
本発明は、故障の自己診断が可能な角速度センサに関する。
【背景技術】
【0002】
従来、物体の角速度を検出する角速度センサ又はそのセンサ素子として、振動する質量体に回転が加えられた際に生じる慣性力の一種であるコリオリ力に起因して発生する非常に微弱な振動や変位を、圧電素子等の検出手段を介して検出し、各方向における回転や動作を検知・測定するものが知られている。かかる角速度センサは、自動車、船舶、航空機、ロケット等の姿勢を自律制御するための技術に広く使用されており、最近では、カーナビゲーションシステム、デジタルカメラ、ビデオカメラ、ゲーム機、携帯電話等の小型の電子機器にも搭載されるようになってきている。それに伴い、角速度センサの更なる高感度化、薄型化、小型化及び耐久性の向上が要請されており、それに応えるべく、微細加工技術によって形成された圧電薄膜素子を用いた角速度センサが種々提案されている。
【0003】
上述のように薄型化・小型化を図った圧電薄膜素子を用いた角速度センサとしては、振動腕(駆動腕及び検出腕)を備える所謂音叉型の角速度センサが知られている。しかしながら、このような音叉型の角速度センサは、各振動腕の欠損や、駆動又は検出用圧電素子及び各圧電素子に接続された回路等の短絡及び断線等を含む破損によって、動作不良及び機能低下といった不具合を生じやすい傾向にある。
【0004】
そこで、かかる不都合を防止すべく、例えば特許文献1には、音叉形の一対の駆動板とこの一対の駆動板の各々の先端に直交関係をなすように設けられた検知板とからなる振動体と、この振動体を駆動振動させるために駆動板に設けられた駆動手段と、振動体の駆動方向と直交する方向に発生する角速度出力を得るために検知板に設けられた検出手段とを備え、検知板と駆動板との機械結合に起因する機械結合信号を検出手段により検出し、機械結合信号を発生させるための手段を別個に設けることなく角速度センサに生じた故障の有無を自己診断するための機構が記載されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平8−327363号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、上記従来の特許文献1に記載された角速度センサにおいては、機械的もれ振動の位相が駆動振幅の位相と同相であり、故障を自己診断するための特別な振動検出回路を必要とする。よって、特許文献1の角速度センサでは、通常のコリオリ検出回路における故障を判定することが困難であり、また、追加的に設けた特別な検出回路自体が故障する可能性も高くなると考えられる。
【0007】
そこで、本発明は上記事情に鑑みてなされたものであり、特別な振動検出回路を設けることなく、角速度センサにおける故障の有無を検知する自己診断モードで動作可能な角速度センサを提供することを目的とする。
【課題を解決するための手段】
【0008】
圧電薄膜素子を用いた角速度センサの製造においては、圧電薄膜素子の配置態様や圧電薄膜素子を配置する音叉の寸法精度など極めて高い加工精度が要求される。従って、膜厚が極めて薄く且つ表面積も小さな角速度センサを製造するにあたっては、音叉を構成する各振動腕の形状や設置バランス等を設計通りの理想型とすることが求められると共に、圧電薄膜素子の位置を精確に保つことが求められる。微細な角速度センサを製造するにあたってこのような精度を保つことは製造上極めて困難であるため、例えば、音叉を構成する駆動腕のX方向振動が検出腕側にもれたり、駆動腕が理想的なxy平面に沿った振動だけではなくZ方向の振動も生起し得るものである。通常の角速度検出動作においては、このようなもれ振動は同位相であり、結果的にキャンセルされてしまうものであるが、この振動の発生源となる駆動腕の駆動を工夫することで、角速度検出時と同様の位相差のある振動を発生させることができることに本発明者らは想到した。本発明はこのような知見に基づいてなされたものである。
【0009】
上記課題を解決するために、本発明による角速度センサは、第一駆動腕と第二駆動腕とを有する音叉型の振動子と、第一駆動腕に設けられ、駆動平面に沿って振動するように第一駆動腕を励振する第一駆動素子と、第二駆動腕に設けられ、駆動平面に沿って振動するように第二駆動腕を励振する第二駆動素子と、第一駆動素子と第二駆動素子とのそれぞれに駆動信号を出力し、第一駆動腕及び第二駆動腕を振動させる制御部と、第一駆動腕と第二駆動腕よりの振動を検出し、振動子に入力される角速度を検出する検出部と、を備える角速度センサであって、制御部は、第一駆動腕と第二駆動腕とをそれぞれ同一周期及び同一振幅で、且つ第一駆動腕に対する第二駆動腕の振動位相が逆位相となるように、第一駆動素子及び第二駆動素子に駆動信号を出力する通常モードと、第一駆動腕と第二駆動腕とをそれぞれ同一周期及び同一振幅で、且つ第一駆動腕に対する第二駆動腕の振動位相が逆位相からずれつつ同位相とはならないように、第一駆動素子及び第二駆動素子に駆動信号を出力する自己診断モードと、を実行することを特徴としている。
【0010】
このような構成を有する本発明の角速度センサにおいて、振動子の第一駆動腕には第一駆動素子が設けられ、第二駆動腕には第二駆動素子が設けられているので、第一駆動腕及び第二駆動腕をそれぞれ駆動平面に沿って振動するように励振することができる。この振動子に角速度が入力されると、コリオリ力によって駆動平面に直交する方向の力が発生し、第一駆動腕及び第二駆動腕は駆動平面に直交する方向に振動することになる。通常モードでは、前記第一駆動腕と前記第二駆動腕とをそれぞれ同一周期及び同一振幅で、且つ互いの振動位相が逆位相となるように駆動することで、振動子に入力された角速度を精確に検出するものとしている。
【0011】
ところで、第一駆動腕には第一駆動素子を、第二駆動腕には第二駆動素子を設けている関係上、上述したような製造上の理由により第一駆動腕及び第二駆動腕は、振動子に角速度が入力されていない状態であっても、振動平面方向の駆動振動や振動平面に直交する方向に発生する微小な振動が検出部にもれてしまう。本発明では、角速度が未入力の場合であっても検出部にもれてしまう所謂「もれ振動」を利用し、自己診断を実行可能なように構成している。具体的には、第一駆動腕と第二駆動腕とをそれぞれ同一周期及び同一振幅で、且つ互いの振動位相が逆位相からずれつつ同位相とはならないように駆動することで、もれ振動によって検出部では擬似的な角速度を検出するように構成している。この擬似的な角速度が定常的に現れるか否かによって、角速度検出装置を構成する機能部に故障が発生しているか否かを自己診断することが可能となる。
【0012】
また、このように構成した角速度センサは、故障の自己診断を行うために追加の振動検出回路や特別な制御手段等を必要としないので、角速度センサの製造における組立て精度を向上させ、製造コストを低減することができる。また、自己診断機能付きの角速度センサとして必要な構成手段の総数を抑えることで経年的故障リスクを低減することもできる。
【0013】
本発明による角速度センサは、第一駆動腕と第二駆動腕とが接続される基部と、基部における第一駆動腕と第二駆動腕との接続部位と対向する位置に接続された一対の検出腕とを備え、駆動腕にて生じた振動を、基部を介して伝搬させ一対の検出腕にて検出するように構成することもできる。
【0014】
このように構成した角速度センサは、駆動平面内の駆動振動と、駆動振動に比して極めて小さい、コリオリ力による駆動平面に直交する方向の振動とが混在しないように、基部を介して駆動腕と検出腕とを離隔させ、検出感度及び精度の向上を実現することができる。
【0015】
本発明による角速度センサは、駆動腕で生じた振動を当該駆動腕にて検出するように構成することができる。
【0016】
このようにして構成した角速度センサは、検出腕が不要であるので、角速度センサ自体の面積を低減させ、角速度センサのさらなる小型化が実現する。また、駆動腕と検出腕が同一であることで、駆動腕に生じたコリオリ力に起因する振動をより直接的に検知することが可能となる。
【0017】
本発明による角速度センサは、検出された振動信号が規定の数値範囲に存在しないと判定するときに、前記角速度センサを故障と診断する判定回路をさらに有するように構成することができる。
【0018】
このようにして構成した角速度センサは、動作不良及び機能低下といった角速度センサに生じる不具合を簡便に自己診断することが可能であり、判定結果を、角速度センサ或いはそれが設けられたセンサパッケージの交換や保守時期等の指標とすることができる。
【0019】
本発明による角速度センサは、制御部が、第一駆動腕の駆動のタイミングを早める又は遅らせる及び/又は第二駆動腕の駆動のタイミングを早める又は遅らせる様に構成することができる。
【0020】
このようにして構成した角速度センサは、故障検出の為の専用の回路を追加的に設ける必要はなく、第一駆動腕及び/又は第二駆動腕の振動のタイミングをずらして駆動させるだけで、角速度センサにおける不具合の発生の有無を精確に把握することが可能であり、簡便に角速度センサの自己診断を行うことが可能である。
【0021】
第一及び第二の駆動腕の各々が、上面に、第一駆動腕と第二駆動腕各々の延在方向に延びる中心線を境界として左右等間隔に離間して設けられた2つの駆動素子を有するように構成しても良い。
【0022】
このようにして構成した角速度センサは、駆動腕上面にのみに駆動素子が存在することで、角速度センサの厚さ方向に僅かな振動を生起させ、それによって角速度センサに対して積極的にZ方向のもれ振動を付与することが可能となる。従って、角速度センサがその他の要因ではもれ振動を生起させない場合にも、もれ振動を利用する角速度センサの故障の自己診断を行うことができる。
【発明の効果】
【0023】
以上のように、本発明による角速度センサは、第一駆動腕と第二駆動腕とを有する音叉型の振動子と、第一駆動腕に設けられ、駆動平面に沿って振動するように第一駆動腕を励振する第一駆動素子と、第二駆動腕に設けられ、駆動平面に沿って振動するように第二駆動腕を励振する第二駆動素子と、第一駆動素子と第二駆動素子とのそれぞれに駆動信号を出力し、第一駆動腕及び第二駆動腕を振動させる制御部と、第一駆動腕と第二駆動腕よりの振動を検出し、振動子に入力される角速度を検出する検出部と、を備え、制御部は、第一駆動腕と第二駆動腕とをそれぞれ同一周期及び同一振幅で、且つ第一駆動腕に対する第二駆動腕の振動位相が逆位相となるように、第一駆動素子及び第二駆動素子に駆動信号を出力する通常モードと、第一駆動腕と第二駆動腕とをそれぞれ同一周期及び同一振幅で、且つ第一駆動腕に対する第二駆動腕の振動位相が逆位相からずれつつ同位相とはならないように、第一駆動素子及び第二駆動素子に駆動信号を出力する自己診断モードと、を実行するので、所謂「もれ振動」を利用して検出部で擬似的な角速度を検出することができる。そして、この擬似的な角速度が定常的に現れるか否かによって、角速度検出装置を構成する機能部に故障が発生しているか否かを自己診断することが可能となる。また、このように構成した角速度センサは、故障の自己診断を行うために追加の振動検出回路や特別な制御手段等を必要とせず、自己診断機能付きの角速度センサとして必要な構成手段の総数を抑えることで経年的故障リスクを低減することもできる。
【図面の簡単な説明】
【0024】
【図1】本願発明に係る角速度センサに適用可能な制御回路の構成を示すブロック図である。
【図2】本願発明に係る角速度センサに適用可能な制御回路の構成を示すブロック図である。
【図3】第1実施形態に係る角速度センサの構成を示す斜視図である。
【図4】図1に示す角速度センサにおける基部の拡大正面図である。
【図5】第1実施形態に係る角速度センサの駆動腕の基部との接続部近辺におけるX−Z平面断面図である。
【図6】第1実施形態に係る角速度センサの検出腕の基部との接続部近辺におけるX−Z平面断面図である。
【図7】第1実施形態に係る角速度センサの動作原理を示す斜視図である。
【図8】もれ振動のない理想的な仮想角速度センサにおける挙動を各動作モード毎に示す図である。
【図9】もれ振動のない理想的な仮想角速度センサにおける1サイクルの駆動腕の挙動を+Y方向から観察した模式的な上面図である。
【図10】もれ振動のない理想的な仮想角速度センサにおける1サイクルの駆動腕の挙動を+Y方向から観察した模式的な上面図である。
【図11】X方向のもれ振動を有する角速度センサにおける挙動を各動作モード毎に示す図である。
【図12】自己診断モードにおける左右の駆動腕に対する振動の印加のタイミングのずれ具合を示す波形の拡大図である
【図13】Z方向のもれ振動を有する角速度センサにおける挙動を各動作モード毎に示す図である。
【図14】Z方向のもれ振動を有する角速度センサにおける1サイクルの駆動腕の挙動を+Y方向から観察した模式的な上面図である。
【図15】Z方向のもれ振動を有する角速度センサにおける1サイクルの駆動腕の挙動を+Y方向から観察した模式的な上面図である。
【図16】第2実施形態に係る角速度センサの構成を示す正面図である。
【発明を実施するための形態】
【0025】
以下、本発明の実施の形態について図面を参照して詳細に説明する。なお、図面中、同一の要素には同一の符号を付し、重複する説明を省略する。また、上下左右等の位置関係は、特に断らない限り、図面に示す位置関係に基づくものとする。さらに、図面の寸法比率は、図示の比率に限定されるものではない。また、以下の実施の形態は、本発明を説明するための例示であり、本発明をその実施の形態のみに限定する趣旨ではない。さらに、本発明は、その要旨を逸脱しない限り、さまざまな変形が可能である。
【0026】
<第1実施形態>
図1及び図2に示すのは、本実施形態に係る角速度センサに適用可能な、制御部AS(ASIC)の回路構成を示すブロック図である。制御部ASは、後述する角速度センサ1の接続パッド6の各端子と電気的に接続されており、自己診断モードを含む各動作モードにおいて、角速度センサ1の駆動腕2,3の駆動を制御し、検出腕4,5にて検出した検出振動を受信し、内部で信号処理した後、出力している。以下、図3乃至図16を参照しながら、制御部ASの動作原理を詳細に説明する。
【0027】
図3は、本発明の第1実施形態に係る角速度センサ1の構成の一例を示す斜視図である。なお、同図において、角速度センサ1は、紙面におけるX−Y平面内に延在しており、理解を容易にするべく厚さ(Z方向厚さ)を誇張して示している。この角速度センサ1は、中央に位置する基部10と、基部10を挟んで接続され、一方(図1では+Y方向)に延びる一対の駆動腕(左駆動腕2及び右駆動腕3)、及びその駆動腕とは反対側(図1では−Y方向)に延びる一対の検出腕(左検出腕4及び右検出腕5)を備える。
【0028】
基部10、一対の駆動腕2,3、一対の検出腕4,5から構成される角速度センサ1は、共通の材料(例えばシリコンや水晶)からなり、一般的なウェハ(シリコンウェハ等)のパターニング加工(MEMS加工)等によって一体に又は一括で形成することが可能である。
【0029】
図4は、図3に示す角速度センサ1の基部10の拡大正面図である。各駆動腕2,3における基部10との接続部近辺では、左駆動腕2の表面に一対の駆動用圧電素子(駆動素子)12o,12iが、右駆動腕3の表面に一対の駆動用圧電素子13i,13oが設けられている。例えば左駆動腕2において、一対の駆動用圧電素子12o,12iは、左駆動腕2の延在方向(Y方向)に延びる仮想中心線L2を挟んで線対称となる位置に、外側駆動圧電素子12oと内側駆動圧電素子12iとして対向して設けられている。同様に右駆動腕3においては、一対の駆動用圧電素子13i,13oが、仮想中心線L3を挟んで線対称となる位置に、外側駆動圧電素子13oと内側駆動圧電素子13iとして対向して設けられている。
【0030】
次に、一対の検出腕4,5における基部との接続部近辺では、左検出腕4の表面を覆うように検出用圧電素子14が設けられ、右検出腕5の表面を覆うように検出用圧電素子15が設けられている。この検出用圧電素子14,15は、検出腕の延在方向(Y方向)に延びる左検出腕4の仮想中心線L4と、検出用圧電素子14の仮想中心線(図示せず)とが一致し、右検出腕5の仮想中心線L5と、検出用圧電素子15の仮想中心線(図示せず)とが一致するように配置されている。
【0031】
上述の圧電素子群はPZT(チタン酸ジルコン酸鉛)等の圧電材料から構成され得る。図5に示すのは、図3及び図4において示した駆動腕2,3と基部10との接続部近辺におけるX−Z平面断面図である(図4におけるV−V断面図)。図5に示すように、駆動用圧電素子12,13は、各々上部電極21及び下部電極22が圧電材料であるPZT20を挟みこむ三層構造をとっている。
【0032】
一般にPZTは、電圧の印加により自己伸縮する性質を有している。例えば、PZT20は、正の電圧を加えると長手方向に伸張し、負の電圧を加えると長手方向に収縮する。この性質を利用することで、各駆動用圧電素子12,13に対し上部電極21と下部電極22に対して交互に正負の電圧を印加することで、PZT20自体に伸張と収縮を繰り返させることができる。つまり、内側駆動用圧電素子12i,13iと外側駆動用圧電素子12o,13oに印加する電圧の正負及びタイミングを調整することで、駆動腕2,3を、駆動平面(X−Y平面)内でX方向に任意に振動させることが可能となる。例えば、本実施形態に係る角速度センサ1において、制御部ASが、左駆動腕2と右駆動腕3における内側駆動用圧電素子12i,13i、及び外側駆動用圧電素子12o,13oに対して、駆動腕2,3の内側と外側の各電極に対して同一周期で同種の電圧を印加すれば、左駆動腕2と右駆動腕3を駆動平面内でX方向に接近と離反を繰り返すように振動させることができる。
【0033】
図6に示すのは、図3及び図4において示した検出腕4,5と基部10との接続部近辺におけるX−Z平面断面図である(図4におけるVI−VI断面図)。図5と同様、図6に示す検出腕4,5においても、検出用圧電素子14,15は、各々上部電極24及び下部電極25が圧電材料であるPZT23を挟みこむ三層構造をとっている。
【0034】
一般にPZTは、伸縮させることで電圧を生起させる性質も有している。例えば、PZT23は、長手方向に伸張すると正の電圧を生起し、長手方向に収縮すると負の電圧を生起する。この性質を利用することで、駆動腕2,3において生じたコリオリ力に起因した振動が基部10を介して検出腕4,5に伝搬し、検出用圧電素子14,15において当該振動変位によってPZTを伸縮させることができる。そして、PZT23の伸縮により生起した電荷が上部電極24及び下部電極25により検知され、振動検出信号として制御部ASへと送出され得る。
【0035】
なお、角速度センサ1は、図示していないセンサパッケージに対して基部10にて固定されており、同パッケージの内部空間に任意の方向で保持されている。また、図1及び図2に示すように、角速度センサ1には、基部10の上面に敷設された複数の接続パッド6を介して、ワイヤーボンディング等であってよい接続52,53,54,55,57等を用いた制御部ASに対する電気的な接続が与えられている。これら接続により、制御部ASは、角速度センサ1における駆動腕2,3の駆動・振動を制御し、検出腕4,5からの振動検出信号を受信することができる。
【0036】
ここで図1及び図2を参照すると、制御部ASによる左右の駆動腕2,3の実際の駆動は、図示していないドライブアンプからの駆動信号を接続52,53を介して駆動用圧電素子12,13へと伝達することで行なわれる。図4に示すモニタ電極7は、駆動腕2,3の実際の駆動振動を監視し、駆動腕2,3の駆動振動を一定の周期や振幅に保つために設けられるものである。制御部ASよりの命令で駆動する駆動腕2,3の駆動の周期やタイミングなどの情報は、モニタ電極7により検出され、接続パッド6より接続57を介して制御部ASへと送られた後増幅回路64により増幅され、位相調整回路65を通って、検出側の位相調整回路69を通った信号と共にオートゲインコントローラ66へと送られる。オートゲインコントローラ66は、駆動腕2,3の駆動が一定の周期となるように左右の駆動腕2,3各々への駆動信号を加算回路67l,67rにて微調整する。その後、制御部ASは、反転回路68l,68rにて腕の内側と外側とで信号を反転させ、ドライブアンプからの駆動信号を、接続52i,52o,53i,53oを介して駆動用圧電素子12,13へと伝達させる。このように、本実施形態に係る角速度センサの制御部ASは、駆動腕2,3の駆動を、接続52及び53を介してフィードバック制御するために用いられ得る。
【0037】
図7に示すのは、本実施形態に係る角速度センサ1の動作原理を示す斜視図である。角速度センサ1は、その通常モードにおいて、一対の駆動腕2,3を、双方が駆動平面内でX方向に接近と離反を繰り返すように振動させている(矢印Vl,Vr)。角速度センサ1の長手方向(Y方向)の中心軸S周りに回転角速度ωの時計回り回転運動が生じると、コリオリ力の式:F=2mvωで表されるコリオリ力32,33が発生する。このコリオリ力は、駆動腕2,3に印加されているX方向の速度方向及び回転の軸(Y方向)の双方に直交する方向、すなわち駆動平面に直交するZ方向に、回転角速度ωの大きさに比例した振幅(変位)として、駆動腕2,3内に生起しうる。そして、当該コリオリ力は、駆動腕2,3におけるZ方向の振動として具現化する。
【0038】
駆動腕2,3にて発生したZ方向の振動は、検出腕4,5に向かって基部10を伝搬し、検出腕4,5にてZ方向の検出振動34,35として現れる。そして、検出腕4,5における振動変位を検出用圧電素子14,15が検出することにより、角速度センサ1において生じた回転運動の回転角速度ωの回転の向き及び大きさが検出可能となる。
【0039】
1.もれ振動が存在しない場合
図8に示すのは、所謂もれ振動が存在しない理想的な仮想角速度センサ1’における挙動を各動作モード毎に示す図であり、具体的には各駆動腕2,3及び検出腕4,5の振動等の動き、発生するコリオリ力、検出振動・信号等の波形情報を示すグラフである。本図で示す仮想角速度センサ1’は通常モードMDにて動作しており、具体的には、通常モード(角速度無印加時)MDS、通常モード(時計回り角速度印加時)MDR及び通常モード(反時計回り角速度印加時)MDLと言うように、印加される加速度の状態に応じて3つの動作状態に区別されている。
【0040】
仮想角速度センサ1’は、通常モードにおいて、制御部ASから左右の駆動腕2,3上の内/外の駆動用圧電素子12,13に対して互いに同一周期、同一振幅且つ逆位相(一方の位相に対して他方の位相が180°遅れた/又は進んだ位相関係)の駆動信号が印加されている。なお本実施形態においては、仮想角速度センサ1’が、通常モード(角速度無印加時)MDSにて動作している(図8、b,c)。
【0041】
ここで図9は、理想的な仮想角速度センサ1’における1サイクルの駆動腕2,3の挙動を+Y方向から観察した模式的な上面図である。上述した仮想角速度センサ1’における通常モード(角速度無印加時)MDSでは、左右の駆動腕2,3がAからHの順で駆動平面内にてX方向に接近と離反を繰り返すように駆動振動している。なお、駆動腕は共振モードで振動しており、実際の振動は図8、b,cに示す駆動信号から90°遅れた位相となる(図8、d)。なお、本実施例においては、左右の駆動腕2,3の振動が基部10へと伝搬し基部10が振動することで、駆動腕2,3の振動に対応する電気信号がモニタ電極7より接続57を介して制御部ASに送られる。例えば、本実施形態では、モニタ信号が実際の左駆動腕2の動きと同位相となるようにモニタされているが(図8、d,g)、左駆動腕2の動きを逆位相でモニタしても良く、また右駆動腕3の動きをモニタすることも可能である。
【0042】
この仮想角速度センサ1’においては後述の駆動用圧電素子12,13の配置等に起因したもれ振動が生じ得ないので、本モードにおける両駆動腕2,3のZ方向振幅はゼロである(図8、e)。また通常モード(角速度無印加時)MDSでは、仮想角速度センサに1’対してY軸周りの回転が加わっていない(図8、h)ので、当然コリオリ力も発生しない。よって、コリオリ力やもれ振動に関連する振動を検出する検出腕4,5での信号波形等も全て0である(図8、i―o)。
【0043】
通常モード(時計回り角速度印加時)MDRでは、左右の駆動腕2,3が駆動平面内にてX方向に接近と離反を繰り返すように駆動振動している状態で仮想角速度センサ1’に対してY軸周りに時計回りの回転角速度ωが印加され(図8、h)、その回転量に応じたコリオリ力が駆動腕2,3に対してZ方向に生じる。ここで、左右の駆動腕2,3は、同一周期、同一振幅、且つ逆位相、すなわちX方向逆向きに振動しているので、左右の駆動腕には、各々同量かつ逆向きのコリオリ力がZ方向に印加される(図8、i)。つまり、コリオリ力が印加された左右の駆動腕2,3は、駆動腕のZ方向にのみ着目すると、同一周期、同一振幅、且つ逆位相、すなわちZ方向逆向きのバタ足挙動をしている(図8、e)。
【0044】
ここで図10は、理想的な仮想角速度センサ1’における1サイクルの駆動腕2,3の挙動を+Y方向から観察した模式的な上面図である。通常モード(時計回り角速度印加時)MDRでは、図9の仮想角速度センサ1’における駆動腕2,3の駆動と同様に、左右の駆動腕2,3がX方向に接近と離反を繰り返すように駆動振動することに加え、コリオリ力に起因するZ方向の振動が印加されている。従って、通常モード(時計回り角速度印加時)MDRにおける左右の駆動腕2,3は、双方がX方向に接近と離反を繰り返す挙動とZ方向にバタ足をする挙動とがミックスされた、AからHの順で示された楕円軌道で逆方向に回転動作する。
【0045】
図7において示したように、本実施形態に係る仮想角速度センサ1’は、左駆動腕2と左検出腕4がZ方向において同相で振動し、右駆動腕3と右検出腕5がZ方向において同相で振動するので、上下に対応する駆動腕2,3と検出腕4,5とが弓なりになるように動作する。つまり、左右の駆動腕2,3のZ方向の同周期、同振幅、且つ逆位相の振動は、基部10を介して、検出腕4,5へとZ方向の同周期、同振幅、且つ逆位相の振動として伝達され(図8、k)、これにより検出電極での左右の振動も同周期、同振幅且つ逆位相となる(図8、l)。
【0046】
検出腕4,5にて検出された信号は、接続パッド6から接続54,55を介して取り出されて制御部ASへと送られ、制御部AS内の差動増幅回路61にて差分増幅され(図8、m)、同期検波回路62にて、差動増幅された信号を、モニタ信号を90°位相をずらした信号で同期検波62した後(図8、n)、ローパスフィルタ63で平滑化を行い、角速度信号として出力されている(図8、o)。
【0047】
通常モード(反時計回り角速度印加時)MDLでは、左右の駆動腕2,3が駆動振動している仮想角速度センサ1’に対してY軸周りに反時計回りの回転角速度−ωが印加され、(図8、h)、その回転量に応じたコリオリ力が駆動腕2,3に対してZ方向に生じる。この場合、生じるコリオリ力は、通常モード(時計回り角速度印加時)MDRにおける方向とは180°逆の方向となる(図8、e,i)。同様に、左右の駆動腕2,3から基部10を介して、検出腕4,5へと伝搬される信号も通常モード(時計回り角速度印加時)MDRにおける方向とは180°逆の方向となる(図8、k,l)。
【0048】
通常モード(反時計回り角速度印加時)MDLで検出腕4,5にて検出された信号は、通常モード(時計回り角速度印加時)MDRと同様に、接続パッド6から接続54,55を介して制御部ASへと送られ、制御部AS内の差動増幅回路61にて差分増幅され(図8、m)、同期検波回路62にて差動増幅された信号を、モニタ信号を90°位相をずらした信号で同期検波した後(図8、n)、ローパスフィルタ63で平滑化を行い、角速度信号として出力されている。しかし、最終的な出力信号は、通常モード(時計回り角速度印加時)MDRにおける回転方向とは180°逆の方向であることが判る(図8、o)。
【0049】
次に、仮想角速度センサ1’に対するY軸周りの回転の印加が無くなると、仮想角速度センサ1’は、再び通常モード(角速度無印加時)MDSにて動作する。
【0050】
以上説明したとおり、駆動腕2,3で生起したコリオリ力のみが検出腕4,5で検出されることが理想ではあるが、実際には角速度センサ1の加工精度の不完全さ等に起因した機械的もれ振動が検出腕4,5にて検出されることは避けられない。また、もれ振動は、非常に微弱な振動であるコリオリ力に起因した振動と比して振幅が大きい。このようなもれ振動には、駆動腕2,3のX方向の振動が検出腕4,5に伝搬してしまうX方向のもれ振動、及び駆動腕2,3にコリオリ力以外のZ方向の振動が生じるZ方向のもれ振動が存在する。以下に、各もれ振動における角速度センサの自己診断方法を説明する。
【0051】
2.X方向のもれ振動の場合
一般的な音叉型の角速度センサの設計においては、駆動腕のX方向の振動が検出腕側にもれてしまったとしても、検出腕における検出用圧電素子を検出腕の中心線に対して左右対称となるように設けることで、当該もれ振動を相殺するようにしている。具体的には、そのような振動のもれが生じたとき、例えば圧電素子の左側の伸張と右側の収縮とが同一となるようにバランスが保たれ、一枚の検出用圧電素子としてもれ振動を相殺し、ノイズとなり得る電荷を発生させないような設計がなされている。
【0052】
しかしながら、極めて微小な検出用圧電素子の延在方向に対する中心線を検出腕の中心線と完全に合致させることは、製造上困難である。また、ある一本の検出腕にて、腕自体の中心線と腕に加えられる振動の振動中心線とが完全に一致する場合にのみ完全な電荷の相殺となり得るが、音叉型の角速度センサは各腕に対して、腕を固定・支持する基部が左右対称の形状とは成り得ないので、腕の中心線と振動中心線とは常にずれている。よって、音叉型の角速度センサにおいて、応力のバランスを保つことは困難であり、音叉型角速度センサにおいてX方向のもれ振動の生起を有効に禁止することは極めて困難である。
【0053】
図11に示すのは、X方向のもれ振動を生起してしまう角速度センサ1における挙動を各動作モード毎に示す図であり、具体的には各駆動腕2,3及び検出腕4,5の振動等の挙動、発生するコリオリ力、検出振動・信号等の波形情報を示すグラフである。本図で示す角速度センサ1の動作モードは、通常モード(角速度無印加時)MDSx、通常モード(時計回り角速度印加時)MDRx、通常モード(反時計回り角速度印加時)MDLxの3つからなる通常モードMDx、及び自己診断モードMCxである。なお、以下の説明においては、上述したもれ振動のない理想的な仮想角速度センサ1’における説明と重複する説明部分については、特に詳しくは言及していない。
【0054】
角速度センサ1は、通常モードにおいて、制御部ASから左右の駆動腕2,3上の内/外の駆動用圧電素子12,13に対して互いに同一周期、同一振幅且つ逆位相(一方の位相に対して他方の位相が180°遅れた/又は進んだ位相関係)の駆動信号が印加されている。なお本実施形態においては、角速度センサ1が、通常モード(角速度無印加時)MDSxにて動作している(図11、b,c)。しかしながら、通常モード(角速度無印加時)MDSxで本角速度センサ1が起動される場合、先に述べた理想的な仮想角速度センサ1’とは異なり、X方向のもれ振動が生じて、検出腕4,5がX方向に振動する。なお、本実施形態に係る角速度センサ1は、駆動腕2,3より基部10を介して伝搬するもれ振動に起因した検出腕4,5での振動が同位相の振動となる(図11、j)ように素子設計がなされているが、もれ振動に起因した検出腕4,5での振動が逆位相の振動となるような素子設計がなされてもよい。本実施形態に係る角速度センサ1は、もれ振動に起因した検出腕4,5での振動が完全には同位相又は逆位相状態とならない場合であっても有効である。
【0055】
通常モード(角速度無印加時)MDSxでは、角速度センサ1に対してY軸周りの回転が加わっていない(図11、h)ので、当然コリオリ力も発生しておらず、コリオリ力やZ方向のもれ信号を検出する検出腕4,5でのZ方向の振動は検出され得ない(図11、i)。また、検出信号の差動増幅出力は左右の検出信号の差分となるが、上述のとおり左右の検出信号はX方向においては同位相(図11、j)、且つZ方向においては0(図11、k)なので、獲得される差動出力は結果的に0となる(図11、m,o)。
【0056】
通常モード(時計回り角速度印加時)MDRxでは、左右の駆動腕2,3が駆動平面内でX方向に接近と離反を繰り返すように駆動振動している状態で角速度センサ1に対してY軸周りに時計回りの回転角速度ωが印加され、その回転量に応じたコリオリ力が駆動腕2,3に対してZ方向に生じる。ここで、左右の駆動腕2,3は、同一周期、同一振幅、且つ逆位相、すなわちX方向逆向きに振動しているので、各々同量かつ逆向きのコリオリ力がZ方向に印加される(図11、i)。つまり、コリオリ力が印加された左右の駆動腕2,3は、駆動腕のZ方向にのみ着目すると、同一周期、同一振幅、且つ逆位相すなわちZ方向逆向きのバタ足挙動をしている(図11、e)。
【0057】
本モードでは、通常モード(角速度無印加時)MDSxと同様の駆動腕2,3における上記コリオリ力に起因したZ方向の振動に加えて、X方向のもれ振動も検出腕4,5へと伝搬している。よって、検出腕4,5にて検出されるのは、Z方向の同周期、同振幅、且つ逆位相の振動(図11、k)だけでなく、通常モード(角速度無印加時)MDSxで検出されたものと同じ、同周期、同振幅、且つ同位相のX方向のもれ振動である(図11、j)。
【0058】
先に述べたように、検出腕4,5におけるX方向の振動は同相である(図11、j)ので、差動増幅によってキャンセルされる。一方で、検出腕4,5におけるコリオリ力に起因したZ方向の振動は逆相である(図11、k)ので、最終的に検出腕4,5の差動出力として出力されるのはZ方向成分のみである(図11、m)。なお、本モードにおいても、差動増幅回路61にて差分増幅された信号(図11、m)は、同期検波回路62にて、モニタ信号を90°位相をずらした信号で同期検波され(図11、n)、検出信号は最終的にローパスフィルタ63で平滑化して角速度信号として出力されている(図11、o)。
【0059】
通常モード(反時計回り角速度印加時)MDLxでは、駆動腕2,3に対してZ方向に生じる回転量に応じたコリオリ力及び検出腕4,5へと伝搬される信号が通常モード(時計回り角速度印加時)MDRxにおける方向とは180°逆の方向となり(図11、k,l)、最終的な出力信号が、通常モード(時計回り角速度印加時)MDRxにおける回転方向とは180°逆の方向となる。このモードにおいても、検出腕4,5におけるX方向の振動は同位相であり(図11、j)、検出腕4,5におけるZ方向の振動は逆位相である(図11、k)ので、最終的に検出腕4,5の差動出力として出力されるのはZ方向成分のみであり(図11、m)、検出信号は最終的にローパスフィルタ63で平滑化して出力されている(図11、o)。
【0060】
次に、角速度センサ1に対するY軸周りの回転の印加が無くなると、角速度センサ1は、再び通常モード(角速度無印加時)MDSxにて動作する。
【0061】
図11に示す自己診断モードMCx(図11、a)は、例えば角速度センサ1の起動時やスタンバイ状態時等、実際に角速度センサ1で回転角速度ωを検知していない時に、実用上問題とならない程度の短時間に、任意に実行可能なアクティブなモードである。この自己診断モードMCxを用いることで、工場出荷状態等の初期的な故障が無い状態で角速度センサ1を自己診断モードMCxで駆動させて得られる初期自己診断信号と、角速度センサ1の利用開始後実際に測定された自己診断信号とを比較することのみで、角速度センサ及び/又はそれらに設けられた駆動用圧電素子個々の破損又は故障、並びに回路の短絡や信号線等の断線等といった様々な不具合の発生の有無を検知することが可能である。また、自己診断モードMCxを活用することで、動作不良及び機能低下といった角速度センサに生じた不具合を迅速且つ精確に判定し、角速度センサ或いはそれが設けられたセンサパッケージの交換を迅速に行ったり、保守時期等の指標とすることができる。
【0062】
図12に示すのは、自己診断モードMCxにおける左右の駆動腕2,3に対する振動の印加のタイミングのずれを示す波形の拡大図である(この拡大図は、図11、b,cに対応している)。ここに示すように、自己診断モードMCxでは、他のモードにおいて逆位相状態にある双方の駆動腕2,3において、一方の駆動腕に対して+α°ずれた(α°早い)駆動振動を印加し、他方の駆動腕に対しては−β°ずれた(β°遅い)駆動信号を印加することを特徴としている。すなわち、左駆動腕2と右駆動腕3とをそれぞれ同一周期及び同一振幅で、且つ左駆動腕2と右駆動腕3の振動位相が逆位相からずれつつ同位相とはならないように、制御部ASが左駆動腕2と右駆動腕3の駆動振動を制御している。
【0063】
自己診断モードMCxにおける制御部ASによる駆動腕2,3の駆動制御は、図1に示すようにコリオリ検出用の制御部ASに自己診断用ブロックSCを追加するだけで良い。具体的には、オートゲインコントローラ66を通過した信号の一部が、位相調整回路81を通過した後に、自己診断モードMCxの起動スイッチ82へと向う。自己診断モードMCxがオンの場合(図11、a)、増幅回路83にて+α°ずれた駆動振動に対応する信号が生成され、分岐させた後に一方の信号を反転回路68にて反転させて、左右の駆動腕2,3の各々へ駆動信号を加算回路67へと送出する。例えば、図1の制御回路では、左駆動腕2に対して+α°ずれた(α°早い)駆動振動を印加し、右駆動腕3に対しては−α°ずれた(α°遅い)駆動信号を生起させることができる。なお、反転回路68を設けずに、異なるタイミングの駆動振動を印加するために左駆動腕用の増幅回路と右駆動腕用の増幅回路を個別に設けても良い。
【0064】
また、図2に示す制御部ASの別実施形態のように、加算回路67が左駆動腕2にのみ接続されるようにしても良い。この場合、右駆動腕3の駆動振動は全てのモードで終始固定されたままであり、左駆動腕2に対してのみ、オートゲインコントローラ66によるフィードバック制御、並びに自己診断モードMCxにおける+α°ずれた(α°早い)駆動振動の印加を行うこともできる。このように、自己診断モードMCxにおいては、双方の駆動腕2,3における振動が逆位相の状態から互いにずれていればよい。
【0065】
上述のような駆動タイミングの「ずれた」制御信号を双方の駆動腕2,3に与えることにより、駆動腕2,3はX方向のもれ振動に対して振動タイミングのずれを付与することができる。すなわち、他モードでは検出腕4,5において同位相の振動として検出され得るX方向の検出信号においても、積極的に左右の検出腕4,5の間で位相ずれを生じさせることができる。なお、本モードでは角速度センサに対してY軸周りの回転が加わっていない(図11、h)ので、駆動腕2,3においてコリオリ力は発生しておらず、検出腕4,5ではZ方向の振動が検出されることはない。
【0066】
このように、X方向の検出信号にずれを生じさせることで、本モードでは、X方向の振動(もれ振動)成分についても差動振動を取得することが可能となる(図11、m)。つまり、自己診断モードMCxでは、通常モードと同様に、検出腕4,5にて検出された信号が制御部AS内の差動増幅回路61にて差分増幅され(図11、m)、同期検波回路62にて差動増幅された信号を、モニタ信号を90°位相をずらした信号で同期検波した後(図11、n)、検出信号をローパスフィルタ63で平滑化して自己診断信号として出力する(図11、o)ことが可能となる。
【0067】
本実施形態に係るX方向のもれ振動を有する角速度センサ1は、製品出荷時の正常状態で、自己診断モードで駆動させて出力される初期的な自己診断信号(図11、o)を例えばメモリ等の記憶手段に記憶した出力監視回路(判定回路)70を備えている。当該出力監視回路70は、初期的な自己診断信号に対して様々な故障状況に応じた閾値等の条件を設定し、実際の自己診断信号と初期的な自己診断信号とを比較する。そして、当該閾値から自己診断信号の値が外れる場合や、特定の故障状態に対応する自己診断信号が検知された場合に異常フラグを発生させて、外部に故障判定結果と通知することが可能となる。
【0068】
このように、本願発明におけるX方向のもれ振動を有する角速度センサ1は、故障検出の為に専用の回路構成を追加的に設ける必要はなく、通常の角速度検出用の制御部ASを用いて駆動腕2,3の振動タイミングをずらして駆動させるだけで角速度センサや圧電素子の破損又は故障、及び/又は回路の短絡や信号線等の断線といった不具合の発生の有無を精確に把握することができ、角速度センサの故障を判定する自己診断を簡便に行うことが可能である。
【0069】
3.Z方向のもれ振動の場合
一般的な音叉型の角速度センサの設計において、駆動腕2,3は、X方向の駆動振動をするための駆動用圧電素子12,13を有するのみであり、Z方向の振動を印加することは一切考慮されていない。しかしながら、図5において示したように、駆動用圧電素子12,13がシリコン製の駆動腕2,3の表面にのみ配置されているので、駆動腕2,3の表面と裏面との間で、駆動腕2,3の厚み方向の動きむらが生じ、微小ではあるがX方向以外のZ方向の振動を生起することは回避できない。
【0070】
図13に示すのは、Z方向のもれ振動を生起してしまう角速度センサ1における挙動を各動作モード毎に示す図であり、具体的には各駆動腕2,3及び検出腕4,5の振動等の挙動、発生するコリオリ力、検出振動・信号等の波形情報を示すグラフである。本図で示す角速度センサの動作モードは、通常モード(角速度無印加時)MDSz、通常モード(時計回り角速度印加時)MDRz、通常モード(反時計回り角速度印加時)MDLzの3つからなる通常モードMDz、及び自己診断モードMCzである。なお、以下の説明においては、もれ振動のない理想的な仮想角速度センサ1’及びX方向のもれ振動を有する角速度センサ1における上記説明と重複する説明部分については、特に詳しくは言及していない。
【0071】
角速度センサ1は、通常モードにおいて、制御部ASから左右の駆動腕2,3上の内/外の駆動用圧電素子12,13に対して互いに同一周期、同一振幅且つ逆位相(一方の位相に対して他方の位相が180°遅れた/又は進んだ位相関係)の駆動信号が印加されている。なお本実施形態においては、角速度センサ1が、通常モード(角速度無印加時)MDSzにて動作している(図13、b,c)。しかしながら、通常モード(角速度無印加時)MDSzで本角速度センサ1が起動される場合、先に述べた理想的な角速度センサ1’等とは異なり、駆動用圧電素子12,13の駆動腕2,3の表面への配置に起因したZ方向のもれ振動が生じて、検出腕4,5がZ方向にわずかに振動する。本実施形態に係る角速度センサ1は、駆動腕2,3にて実際に生じるZ方向の振動が左右とも同位相であり(図13、e)、駆動腕2,3より基部10を介して伝搬するもれ振動に起因した検出腕4,5でのZ方向振動も同様に同位相の振動となる(図13、k)ように素子設計がなされているが、例えばもれ振動に起因した検出腕4,5での振動が逆位相の振動となるような素子設計もまた可能である。加えて、本実施形態に係る角速度センサ1は、もれ振動に起因した検出腕4,5での振動が、完全には同位相又は逆位相状態とならない場合であっても有効である。
【0072】
ここで図14は、Z方向のもれ振動を有する角速度センサ1における1サイクルの駆動腕2,3の挙動を+Y方向から観察した模式的な上面図である。この角速度センサ1における通常モード(角速度無印加時)MDSzでは、左右の駆動腕2,3が、AからHの順で双方がX方向に接近と離反を繰り返す振動と、AからHの順で双方が同位相でZ方向に駆動する振動とがミックスされており、結果的に斜め直線方向に反復振動していることが判る。なお、駆動腕2,3及び検出腕4,5は共振モードで振動しており、実際の振動は図13、b,cに示す駆動信号から90°遅れた位相となる(13,d,e)。
【0073】
通常モード(角速度無印加時)MDSzでは、角速度センサに対してY軸周りの回転が加わっていない(図13、h)ので、当然コリオリ力も発生しておらず、ここではX方向のもれ信号も考慮していないので、検出腕4,5ではZ方向のもれ振動のみが検出される(図13、k)。検出信号の差動増幅出力は左右の検出信号の差分となるが、上述のとおり左右の検出信号はZ方向において同位相(図13、k)、且つX方向においては0(図13、j)なので、獲得される差動出力は結果的に0となる(図13、m,o)。
【0074】
通常モード(時計回り角速度印加時)MDRzでは、左右の駆動腕2,3がX方向に接近と離反を繰り返すように駆動振動している状態で角速度センサ1に対してY軸周りに時計回りの回転角速度ωが印加され(図13、h)、その回転量に応じたコリオリ力が駆動腕2,3に対してZ方向に生じる。ここで、左右の駆動腕2,3は、同一周期、同一振幅、且つ逆位相すなわちX方向逆向きに振動しているので、左右の駆動腕2,3には、各々同量かつ逆向きのコリオリ力がZ方向に印加される(図13、i)。ここでもやはり、コリオリ力が印加された左右の駆動腕2,3は、駆動腕のZ方向にのみ着目すると、同一周期、同一振幅、且つ逆位相すなわちZ方向逆向きのバタ足挙動をしようとする(図13、i)。
【0075】
しかしながら、上述のとおり駆動腕2,3には同一周期、同一振幅、且つ同位相のZ方向のもれ振動も存在しているので、これら二つのZ方向振動が駆動腕2,3において混在している(図13、e)。
【0076】
ここで図15は、Z方向のもれ振動を有する角速度センサ1における1サイクルの駆動腕2,3の挙動を+Y方向から観察した模式的な上面図である。通常モード(時計回り角速度印加時)MDRzでは、図15において示された様に左右の駆動腕2,3がX方向に接近と離反を繰り返す駆動振動に加え、上述したZ方向のもれ振動と、コリオリ力に起因するZ方向の振動との3つの振動が混在している。従って、Z方向のもれ振動を有する角速度センサ1における通常モード(時計回り角速度印加時)MDRzでの左右の駆動腕2,3は、図15において示されるように、AからHの順で示され斜め方向に歪んだ楕円軌道で逆方向に回転動作する。なお、この斜め方向に歪んだ楕円軌道の回転動作には、バタ足挙動を包含するコリオリ力に起因するZ方向の振動がミックスされているので、左右の駆動腕2,3の動きはZ方向において逆位相となっている。
【0077】
通常モード(時計回り角速度印加時)MDRzでは、駆動腕2,3におけるZ方向のもれ振動と、コリオリ力に起因するZ方向の振動が混在した振動が基部10を介して伝搬し、検出腕4,5にて検出されている(図13、k)。この2つのZ方向成分がミックスされた検出信号のうち、先に述べたように、同位相成分(図13、e)であるもれ振動は差動増幅によってキャンセルされる。一方で、コリオリ力に起因するZ方向の振動成分は逆位相であるので(図13、i)、最終的に検出腕4,5の差動出力として出力されるのはコリオリ力に起因するZ方向成分のみである(図13、m)。差動増幅された信号はモニタ信号を90°位相をずらした信号で同期検波された後、最終的にローパスフィルタ63で平滑化して角速度信号として出力されている(図13、n,o)。
【0078】
通常モード(反時計回り角速度印加時)MDLzでは、駆動腕2,3に対してZ方向に生じる回転量に応じたコリオリ力及び検出腕4,5へと伝搬される信号が通常モード(時計回り角速度印加時)MDRzにおける方向とは180°逆の方向となり(図13,k,l)、最終的な出力信号が、通常モード(時計回り角速度印加時)MDRzにおける回転方向とは180°逆の方向となる。このモードにおいても、同位相成分(図13、e)であるZ方向のもれ振動は差動増幅61によってキャンセルされ、逆相であるコリオリ力に起因するZ方向の振動成分(図13、i)のみが、差動出力として出力される(図13、m)。信号は同期検波された後、最終的にローパスフィルタ63で平滑化して角速度信号として出力されている(図13、n,o)。
【0079】
次に、角速度センサ1に対するY軸周りの回転の印加が無くなると、角速度センサ1は、再び通常モード(角速度無印加時)MDSzにて動作する。
【0080】
自己診断モードMCz(図13、a)は、例えば角速度センサ1の起動時やスタンバイ状態等、実際に角速度センサ1で回転角速度ωを検知していない時に、実用上問題とならない程度の短時間に任意に実行可能である。Z方向のもれ振動を有する角速度センサ1における自己診断モードMCzによる角速度センサ1の不具合検知の方法等は、上述したX方向のもれ振動を有する角速度センサ1のそれと同様である。
【0081】
Z方向のもれ振動を有する角速度センサ1においても、自己診断モードMCzにおける左右の駆動腕2,3に対する振動の印加のタイミングのずれは、図12に示したものと同様である(図13、b,cと、図12とが対応している)。ここでも、左駆動腕2と右駆動腕3とをそれぞれ同一周期及び同一振幅で、且つ左駆動腕2と右駆動腕3の振動位相が逆位相からずれつつ同位相とはならないように、制御部ASが左駆動腕2と右駆動腕3の駆動振動を制御している。
【0082】
このようなタイミングの「ずれた」X方向駆動振動を双方の駆動腕2,3に与えることにより、駆動腕2,3のZ方向のもれ振動に対して振動のタイミングのずれを与えることができる。すなわち、他モードでは検出腕4,5において同位相の振動として検出されるZ方向のもれ振動においても、積極的に左右の検出腕4,5の間に位相ずれを生じさせることができる。なお、本モードでは角速度センサ1に対してY軸周りの回転が加わっていない(図13、h)。よって、駆動腕2,3においてコリオリ力は発生しておらず、コリオリ力に起因するZ方向の回転振動は存在しない。すなわち本モードでは、動作タイミングのずれ(位相のずれ)を含むZ方向のもれ振動のみが検出腕4,5にて検出される(図13,k,l)。なお、検出腕4,5にてX方向の振動が検出されることはない(図13、j)。
【0083】
このように、X方向の検出信号にずれを生じさせることで、本モードでは、Z方向のもれ振動成分についても差動振動を取得する可能となる(図13、m)。つまり、自己診断モードMCzでは、通常モードと同様に、検出腕4,5にて検出された信号が制御部AS内の回路にて差動増幅され(図13、m)、差動増幅された信号を、モニタ信号を90°位相をずらした信号で同期検波した後(図13、n)、ローパスフィルタ63で平滑化して自己診断信号として出力する(図13、o)ことが可能となる。
【0084】
上述したX方向のもれ振動を有する角速度センサ1を用いた自己診断モードMCxと同様に、Z方向のもれ振動を有する角速度センサ1も、製品出荷時の正常状態で、自己診断モードで駆動させて出力される初期的な自己診断信号(図13、o)を例えばメモリ等の記憶手段に記憶した、出力監視回路(判定回路)70を備えている。当該出力監視回路70は、初期的な自己診断信号に対して様々な故障状況に応じた閾値等の条件を設定し、実際の自己診断信号と初期的な自己診断信号とを比較し、当該閾値よりから自己診断信号の値が外れる場合や、特定の故障状態に対応する自己診断信号が検知された場合に異常フラグを発生させて、外部に故障判定結果と通知することが可能となる。
【0085】
本願発明におけるZ方向のもれ振動を有する角速度センサ1もまた、故障検出の為の専用回路構成を追加的に設ける必要はなく、通常の角速度検出用の制御部ASを用いて駆動腕2,3の振動タイミングをずらして駆動させるだけで角速度センサや圧電素子の破損又は故障、及び/又は回路の短絡や信号線等の断線といった不具合の発生の有無を精確に把握することができ、簡便に角速度センサの故障を判定する自己診断を行うことが可能である。
【0086】
4.X方向のもれ振動とZ方向のもれ振動が混在する場合
一般的な音叉型角速度センサの設計においては、上述のとおり駆動腕のX方向駆動振動が検出腕側にもれてしまうことが避けられず(X方向のもれ振動)、駆動腕にX方向以外の振動が生起することもまた避けられない(Z方向のもれ振動)。よって、上述したX方向のもれ振動及びZ方向のもれ振動は、角速度センサ1において何れか一方のみが存在し得るものではなく、双方が混在している状態で存在する。
【0087】
しかしながら、本願に係る自己診断モードで作動する角速度センサを用いれば、上述のとおり駆動腕におけるX方向及びZ方向の駆動振動に位相差を設けていることで、検出信号からX方向及びZ方向の合成の差動出力を取り出すことも可能であり、それを故障の自己診断に用いるべく自己診断信号として出力することが可能である。またさらに、この診断に用いる振動検出回路には、コリオリ力検出に用いる角速度検出用の制御部ASをそのまま流用することが可能であり、高い故障検知能力を有しつつ、角速度センサの構成を簡便にすることで故障等のリスクを大幅に低減することができる。
【0088】
<第2実施形態>
図16に示すのは、本発明の第2実施形態に係る角速度センサ100(角速度センサ)の構成の一例を示す正面図である。この角速度センサ100は、基部110と、基部110の上辺から(図11では+Y方向)に延びる一対の駆動検出腕(左駆動検出腕102及び右駆動検出腕103)を備える。このようなU字型角速度センサ100においては、駆動用圧電素子112,113及び検出用圧電素子114,115が同一の音叉型振動子に設けられており、角速度センサ面積を低減することが可能であり、角速度センサのさらなる小型化が可能となる。また、駆動腕と検出腕が同一であることで、駆動腕に生じたコリオリ力に起因する振動をより直接的に検知することが可能となる。
【0089】
この第2実施形態に係るU字型の角速度センサ100においても、X方向及びY方向のもれ振動が生じるメカニズムは第1実施形態のそれと同一である。つまり、本実施形態に係るX方向及びZ方向のもれ振動を有する角速度センサ100は、初期的に故障がない状態で、自己診断モードMCにおいて獲得される初期的な自己診断信号に、様々な故障状況に応じた閾値等の条件を設定することで、当該閾値より自己診断信号が外れる場合や、特定の故障状態に対応する自己診断信号が検知された場合に異常フラグを発生させて、外部に故障判定結果と通知することが可能である。結果として、本願発明におけるX方向及びZ方向のもれ振動を有するU字型角速度センサ100は、故障検出の為の専用回路構成を追加的に設ける必要はなく、駆動検出腕102,103の動作タイミングをずらすことだけで、通常の角速度検出用の制御部ASを用いた角速度センサ100の故障の自己診断を行うことが可能である。
【0090】
なお、本発明は、上記の各実施形態に限定されるものではなく、先に述べたとおり、本発明の要旨を逸脱しない範囲で、種々の変更(例えば、各実施形態の内容の適宜な組み合わせ等)が可能である。例えば、本発明における自己診断は、一定の角速度ωが印加されている状態であれば、通常モードと自己診断モードの出力の差分をとることで実行可能である。またさらに、駆動腕及び検出腕の表面に設けられるものと同一の振動素子を各腕の表面のみならず裏面に、同様の配置法則をもって設けることも可能である。このように構成した角速度センサであれば、駆動腕における表裏面間の動きむらを最小限に抑えて角速度センサのノイズとなり得るもれ振動を低減させつつ、センサの感度を向上させることも可能である。しかも、表裏両面の圧電薄膜素子の位置を精確に保つことは製造上極めて困難であるので、この場合であっても微小ではあるが角速度センサにおけるもれ振動を生起することは避けられないと考えられる。よって、この両面振動素子構成を有する角速度センサは、本願発明にかかる自己診断モードで動作可能である。
【符号の説明】
【0091】
1,100…角速度センサ、1’…仮想角速度センサ、2…左駆動腕、3…右駆動腕、4…左検出腕、5…右検出腕、6…接続パッド、7…モニタ電極、10…基部、12,13,112,113…駆動用圧電素子、14,15,114,115…検出用圧電素子、21,23…上部電極、22,24…下部電極、32,33…コリオリ力、34,35…検出振動、52,53,54,55,57…接続、61…差動増幅回路、62…同期検波回路、63…ローパスフィルタ、64…増幅回路、65…位相調整回路、66…オートゲインコントローラ、67…加算回路、68…反転回路、69…位相調整回路、70…出力監視回路、81…位相調整回路、82…起動スイッチ、83…増幅回路、102…左駆動検出腕、103…右駆動検出腕、110…基部、AS…制御部、MD…通常モード、MDS…通常モード(角速度無印加時)、MDR…通常モード(時計回り角速度印加時)、MDL…通常モード(反時計回り角速度印加時)、MC…自己診断モード、SC…自己診断用ブロック、L2,L3,L4,L5…仮想中心線、S…中心線、ω…回転角速度、V…矢印。
【特許請求の範囲】
【請求項1】
第一駆動腕と第二駆動腕とを有する音叉型の振動子と、
前記第一駆動腕に設けられ、駆動平面に沿って振動するように前記第一駆動腕を励振する第一駆動素子と、
前記第二駆動腕に設けられ、前記駆動平面に沿って振動するように前記第二駆動腕を励振する第二駆動素子と、
前記第一駆動素子と前記第二駆動素子とのそれぞれに駆動信号を出力し、前記第一駆動腕及び前記第二駆動腕を振動させる制御部と、
前記第一駆動腕と前記第二駆動腕よりの振動を検出し、前記振動子に入力される角速度を検出する検出部と、を備える角速度センサであって、
前記制御部は、
前記第一駆動腕と前記第二駆動腕とをそれぞれ同一周期及び同一振幅で、且つ前記第一駆動腕に対する前記第二駆動腕の振動位相が逆位相となるように、前記第一駆動素子及び前記第二駆動素子に駆動信号を出力する通常モードと、
前記第一駆動腕と前記第二駆動腕とをそれぞれ同一周期及び同一振幅で、且つ前記第一駆動腕に対する前記第二駆動腕の振動位相が逆位相からずれつつ同位相とはならないように、前記第一駆動素子及び前記第二駆動素子に駆動信号を出力する自己診断モードと、を実行する角速度センサ。
【請求項2】
さらに、前記第一駆動腕と前記第二駆動腕とが接続される基部と、当該基部における前記第一駆動腕と前記第二駆動腕との接続部位と対向する位置に接続された一対の検出腕とを備え、
前記駆動腕にて生じた振動を、前記基部を介して伝搬させ前記一対の検出腕にて検出する、
請求項1に記載の角速度センサ。
【請求項3】
前記駆動腕で生じた振動を当該駆動腕にて検出する、
請求項1に記載の角速度センサ。
【請求項4】
前記検出された振動信号が規定の数値範囲に存在しないと判定するときに、前記角速度センサを故障と診断する判定回路をさらに有する、
請求項1乃至3の何れかに記載の角速度センサ。
【請求項5】
前記制御部は、
前記第一駆動腕の駆動のタイミングを早める又は遅らせる、及び/又は前記第二駆動腕の駆動のタイミングを早める又は遅らせる、
請求項1乃至4の何れかに記載の角速度センサ。
【請求項6】
前記第一駆動腕及び第二駆動腕の各々は、上面に、前記第一駆動腕と前記第二駆動腕各々の延在方向に延びる中心線を境界として左右等間隔に離間して設けられた2つの駆動素子を有する、
請求項1乃至5の何れかに記載の角速度センサ。
【請求項7】
第一駆動腕と第二駆動腕とを有する音叉型の振動子と、前記第一駆動腕に設けられ、駆動平面に沿って振動するように前記第一駆動腕を励振する第一駆動素子と、前記第二駆動腕に設けられ、前記駆動平面に沿って振動するように前記第二駆動腕を励振する第二駆動素子と、前記第一駆動素子と前記第二駆動素子とのそれぞれに駆動信号を出力し、前記第一駆動腕及び前記第二駆動腕を振動させる制御部と、前記第一駆動腕と前記第二駆動腕よりの振動を検出し、前記振動子に入力される角速度を検出する検出部と、を備える角速度センサの自己診断方法であって、
前記第一駆動腕と前記第二駆動腕とをそれぞれ同一周期及び同一振幅で、且つ前記第一駆動腕に対する前記第二駆動腕の振動位相が逆位相となるように、前記第一駆動素子及び前記第二駆動素子に駆動信号を出力する通常モードを実行する前記制御部が、前記第一駆動腕と前記第二駆動腕とをそれぞれ同一周期及び同一振幅で、且つ前記第一駆動腕に対する前記第二駆動腕の振動位相が逆位相からずれつつ同位相とはならないように、前記第一駆動素子及び前記第二駆動素子に駆動信号を出力する自己診断モードを実行する、
角速度センサの自己診断方法。
【請求項1】
第一駆動腕と第二駆動腕とを有する音叉型の振動子と、
前記第一駆動腕に設けられ、駆動平面に沿って振動するように前記第一駆動腕を励振する第一駆動素子と、
前記第二駆動腕に設けられ、前記駆動平面に沿って振動するように前記第二駆動腕を励振する第二駆動素子と、
前記第一駆動素子と前記第二駆動素子とのそれぞれに駆動信号を出力し、前記第一駆動腕及び前記第二駆動腕を振動させる制御部と、
前記第一駆動腕と前記第二駆動腕よりの振動を検出し、前記振動子に入力される角速度を検出する検出部と、を備える角速度センサであって、
前記制御部は、
前記第一駆動腕と前記第二駆動腕とをそれぞれ同一周期及び同一振幅で、且つ前記第一駆動腕に対する前記第二駆動腕の振動位相が逆位相となるように、前記第一駆動素子及び前記第二駆動素子に駆動信号を出力する通常モードと、
前記第一駆動腕と前記第二駆動腕とをそれぞれ同一周期及び同一振幅で、且つ前記第一駆動腕に対する前記第二駆動腕の振動位相が逆位相からずれつつ同位相とはならないように、前記第一駆動素子及び前記第二駆動素子に駆動信号を出力する自己診断モードと、を実行する角速度センサ。
【請求項2】
さらに、前記第一駆動腕と前記第二駆動腕とが接続される基部と、当該基部における前記第一駆動腕と前記第二駆動腕との接続部位と対向する位置に接続された一対の検出腕とを備え、
前記駆動腕にて生じた振動を、前記基部を介して伝搬させ前記一対の検出腕にて検出する、
請求項1に記載の角速度センサ。
【請求項3】
前記駆動腕で生じた振動を当該駆動腕にて検出する、
請求項1に記載の角速度センサ。
【請求項4】
前記検出された振動信号が規定の数値範囲に存在しないと判定するときに、前記角速度センサを故障と診断する判定回路をさらに有する、
請求項1乃至3の何れかに記載の角速度センサ。
【請求項5】
前記制御部は、
前記第一駆動腕の駆動のタイミングを早める又は遅らせる、及び/又は前記第二駆動腕の駆動のタイミングを早める又は遅らせる、
請求項1乃至4の何れかに記載の角速度センサ。
【請求項6】
前記第一駆動腕及び第二駆動腕の各々は、上面に、前記第一駆動腕と前記第二駆動腕各々の延在方向に延びる中心線を境界として左右等間隔に離間して設けられた2つの駆動素子を有する、
請求項1乃至5の何れかに記載の角速度センサ。
【請求項7】
第一駆動腕と第二駆動腕とを有する音叉型の振動子と、前記第一駆動腕に設けられ、駆動平面に沿って振動するように前記第一駆動腕を励振する第一駆動素子と、前記第二駆動腕に設けられ、前記駆動平面に沿って振動するように前記第二駆動腕を励振する第二駆動素子と、前記第一駆動素子と前記第二駆動素子とのそれぞれに駆動信号を出力し、前記第一駆動腕及び前記第二駆動腕を振動させる制御部と、前記第一駆動腕と前記第二駆動腕よりの振動を検出し、前記振動子に入力される角速度を検出する検出部と、を備える角速度センサの自己診断方法であって、
前記第一駆動腕と前記第二駆動腕とをそれぞれ同一周期及び同一振幅で、且つ前記第一駆動腕に対する前記第二駆動腕の振動位相が逆位相となるように、前記第一駆動素子及び前記第二駆動素子に駆動信号を出力する通常モードを実行する前記制御部が、前記第一駆動腕と前記第二駆動腕とをそれぞれ同一周期及び同一振幅で、且つ前記第一駆動腕に対する前記第二駆動腕の振動位相が逆位相からずれつつ同位相とはならないように、前記第一駆動素子及び前記第二駆動素子に駆動信号を出力する自己診断モードを実行する、
角速度センサの自己診断方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2012−181046(P2012−181046A)
【公開日】平成24年9月20日(2012.9.20)
【国際特許分類】
【出願番号】特願2011−42798(P2011−42798)
【出願日】平成23年2月28日(2011.2.28)
【出願人】(000000516)曙ブレーキ工業株式会社 (621)
【Fターム(参考)】
【公開日】平成24年9月20日(2012.9.20)
【国際特許分類】
【出願日】平成23年2月28日(2011.2.28)
【出願人】(000000516)曙ブレーキ工業株式会社 (621)
【Fターム(参考)】
[ Back to top ]