
角速度検出方法及びその装置
【課題】角速度計測装置が如何なる姿勢であっても角速度の計測が可能で、かつ連続データで検出可能な角速度検出装置を提供すること。
【解決手段】第1補正部102は、3軸磁気信号α1及び3軸加速度信号β1が入力されて第1補正磁気信号α2及び第1補正加速度信号β2を出力する。第2補正部103は、第1補正磁気信号α2及び第1補正加速度信号β2が入力されて第2補正磁気信号α3及び第2補正加速度信号β3を出力する。回転軸情報演算部104は、第2補正磁気信号α3及び第2補正加速度信号β3が入力されて回転軸情報cを出力する。回転量情報演算部105は、回転軸情報cと第1補正磁気信号α2とが入力されて回転量情報dを出力する。角速度ベクトル情報演算部106は、回転軸情報cと回転量情報dとが入力されて角速度ベクトル情報eを出力する。
【解決手段】第1補正部102は、3軸磁気信号α1及び3軸加速度信号β1が入力されて第1補正磁気信号α2及び第1補正加速度信号β2を出力する。第2補正部103は、第1補正磁気信号α2及び第1補正加速度信号β2が入力されて第2補正磁気信号α3及び第2補正加速度信号β3を出力する。回転軸情報演算部104は、第2補正磁気信号α3及び第2補正加速度信号β3が入力されて回転軸情報cを出力する。回転量情報演算部105は、回転軸情報cと第1補正磁気信号α2とが入力されて回転量情報dを出力する。角速度ベクトル情報演算部106は、回転軸情報cと回転量情報dとが入力されて角速度ベクトル情報eを出力する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、角速度検出方法及びその装置に関し、より詳細には、角速度計測装置(携帯端末)が如何なる姿勢であっても角速度の検出が可能で、かつ連続データで検出可能な角速度検出方法及びその装置に関する。
【背景技術】
【0002】
一般に、ジャイロスコープ(gyroscope)とは、物体の角度や角速度(物体や質点の回転の速さを表す量であり、角度と時間の商で定義される。)を検出する計測器で、ジャイロと略されることもあり、また、ジャイロセンサと呼ばれることもある。従来から船や航空機やロケットの自律航法に使用され、最近ではカーナビゲーションシステムや自動運転システム、ロボット、デジタルカメラ、無人偵察機などでも用いられている。
【0003】
このジャイロスコープの種類としては、機械式(回転型,振動型)、流体式(ガス型)、光学式(光ファイバ,リングレーザー)などが一般的である。一方、これらのジャイロスコープを用いずに、携帯機器の分野において既に広く搭載されている磁気センサや加速度センサの出力から演算によって角速度を推定して求めるジャイロ技術がある。
【0004】
磁気センサと加速度センサを用いてジャイロスコープの機能を代替するものとしては、例えば、特許文献1に記載の技術がある。特許文献1に記載の技術によれば、地磁気に対応する大きさの電圧値を出力する地磁気センサと、傾斜を検出する加速度センサ、地磁気センサから出力される電圧値に基づいて方位角を演算し、以前の方位角と比較することにより回転程度を算出した後、回転の傾斜が所定条件を満たすと、回転程度に対応する入力信号を生成する制御部と、を含む。これにより、入力装置が一定角の以上に斜めになると、回転がなかったにも係わらず入力信号が発生する事態を抑えることができる。
【0005】
また、磁気センサと加速度センサを用いて角速度を検出(推定)するものとしては、例えば、特許文献2に記載の角速度センサがある。この角速度センサは、直流及び低周波領域の信号を出力する地磁気センサと、この地磁気センサの出力を電圧変換する変換回路と、高周波領域の信号を出力する加速度センサと、この加速度センサの出力を積分する積分回路と、変換回路の出力と積分回路の出力とから角速度を算出する角速度算出手段とを備えたものである。
【0006】
また、特許文献3に記載されている従来の方位角計測装置は、磁気センサのみを用いた角速度推定を行なうものである。この従来の方位角計測装置は、3軸磁気センサと、磁気センサ駆動電源部と、マルチプレクサ部と、磁気センサ増幅部と、磁気センサA/D変換部と、感度・オフセット補正部と回転角度算出部とが設けられている。3軸磁気センサには、x軸磁気センサ、y軸磁気センサ及びz軸磁気センサが設けられている。マルチプレクサ部は、x軸磁気センサ、y軸磁気センサ及びz軸磁気センサをそれぞれ切り換えるためのもので、磁気センサ駆動電源部から出力された駆動電圧を、x軸磁気センサ、y軸磁気センサ及びz軸磁気センサにそれぞれ印加し、x軸磁気センサ、y軸磁気センサ及びz軸磁気センサから出力されたセンサ信号を時分割的に磁気センサ増幅部に出力する。磁気センサ増幅部は、x軸磁気センサ、y軸磁気センサ及びz軸磁気センサからのセンサ信号を増幅させて、磁気センサA/D変換部に出力する。磁気センサA/D変換部は、磁気センサ増幅部によって増幅されたx軸磁気センサ、y軸磁気センサ及びz軸磁気センサからのセンサ信号をA/D変換し、変換したディジタルデータをそれぞれx軸地磁気測定データ、y軸地磁気測定データ及びz軸地磁気測定データとして感度・オフセット補正部に出力する。感度・オフセット補正部は、磁気センサA/D変換部からのx軸地磁気測定データ、y軸地磁気測定データ及びz軸地磁気測定データに基づいて、x軸磁気センサ、y軸磁気センサ及びz軸磁気センサのオフセット及び感度補正係数を算出し、算出したオフセット及び感度補正係数に基づいて、x軸地磁気測定データ、y軸地磁気測定データ及びz軸地磁気測定データを補正する。回転角度算出部は、感度・オフセット補正部からのx軸地磁気測定データ、y軸地磁気測定データ及びz軸地磁気測定データに基づいて、回転軸の周りの回転角を算出するものである。
【0007】
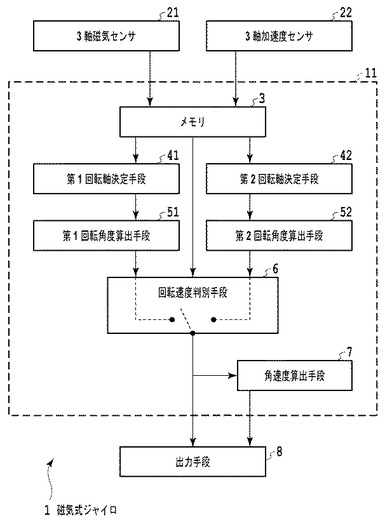
図1は、従来の磁気式ジャイロを説明するための構成図で、特許文献4に記載されているものである。この従来の磁気式ジャイロ1は、3軸磁気センサ21と、3軸加速度センサ22と、メモリ3と、第1回転軸決定手段41と、第2回転軸決定手段42と、第1回転角度算出手段51と、第2回転角度算出手段52と、回転速度判別手段6と、角速度算出手段7と、出力手段8とを有している。
【0008】
3軸磁気センサ21は、被測定体に固定された3軸直交座標系における磁気ベクトルとして地磁気を検出する。3軸加速度センサ22は、3軸直交座標系における加速度ベクトルとして重力加速度を検出する。メモリ3は、3軸磁気センサ21によって時系列的に検出される磁気ベクトルのデータ、及び3軸加速度センサ22によって時系列的に検出される加速度ベクトルのデータを測定した瞬間の時刻情報とともに、蓄積する。
【0009】
第1回転軸決定手段41は、メモリ3に蓄積された異なる2時点以上の磁気ベクトルのデータを基に、3軸直交座標系の原点を通ると共に被測定体の回転運動の基準とする回転軸を決定する。第2回転軸決定手段42は、メモリ3に蓄積された異なる2時点以上の磁気ベクトルのデータ及び加速度ベクトルのデータを基に、3軸直交座標系の原点を通ると共に被測定体の回転運動の基準とする回転軸を決定する。
【0010】
第1回転角度算出手段51は、第1回転軸決定手段41によって決定された回転軸を中心とした被測定体の回転角度を、磁気ベクトルのデータを基に算出する。第2回転角度算出手段52は、第2回転軸決定手段42によって決定された回転軸を中心とした被測定体の回転角度を、磁気ベクトルのデータ及び加速度ベクトルのデータを基に算出する。回転速度判別手段6は、3軸磁気センサ21によって時系列的に検出される磁気ベクトルのデータを基に、被測定体が、基準となる回転速度以上の高速回転を行っているか、あるいは、基準となる回転速度未満の低速回転を行っているかを判別する。
【0011】
角速度算出手段7は、第1回転角度算出手段51又は第2回転角度算出手段52によって算出された異なる2時点間における被測定体の回転角度と、その2時点における磁気ベクトルのデータの採取時刻の差とを基に、回転軸を中心とする被測定体の回転角速度を算出する。出力手段8は、回転速度判別手段6によって、被測定体が高速回転を行っていると判断された高速モードのとき、第1回転角度算出手段51による被測定体の回転角度の算出結果を出力し、回転速度判別手段6によって、被測定体が低速回転を行っていると判断された低速モードのとき、第2回転角度算出手段52による被測定体の回転角度の算出結果を出力する。なお、符号11はコンピュータを示している。
【先行技術文献】
【特許文献】
【0012】
【特許文献1】特開2005−196797号公報
【特許文献2】特開平6−294805号公報
【特許文献3】特開2005―61969号公報
【特許文献4】特許4599502号
【発明の概要】
【発明が解決しようとする課題】
【0013】
しかしながら、上述した特許文献1に記載の技術では、1)加速度センサを用いない構成の場合、装置の保持姿勢が制限される、2)加速度センサによる傾斜補正を用いる構成の場合、運動加速度の影響を受けるため正しい出力を得られない、3)どちらの場合も水平面内での回転の検出に限られているという問題点があった。
【0014】
また、上述した特許文献2に記載の磁気センサと加速度センサで角速度推定する場合では、1)回転運動の際に複数の加速度センサにかかる加速度が異なる事を利用しているため、加速度センサを離れた位置に搭載する必要があり、構成が複雑になる。2)角速度を推定できるのは加速度センサの配置に依存した特定の軸の周りの回転のみに限定される。
【0015】
また、上述した特許文献3に記載のものは、磁気センサのデータから回転軸を求めて角速度を導出しているが、不感軸がある(回転軸と磁気の方向が平行だと回転しても出力が変わらない)という問題があった。
【0016】
また、上述した特許文献4のものは、磁気センサのデータから求まる回転軸と、加速度センサのデータから求まる回転軸とのどちらかを選択して使用しているが、データの連続性が悪い(切り替え時に不連続点が発生する)という問題があった。
【0017】
本発明は、このような問題に鑑みてなされたもので、その目的とするところは、角速度計測装置が如何なる姿勢であっても角速度の計測が可能で、かつ連続データで検出可能な角速度検出方法及びその装置を提供することにある。
【課題を解決するための手段】
【0018】
本発明は、このような目的を達成するためになされたもので、請求項1に記載の発明は、3軸磁気センサが検出した3軸磁気センサ信号に基づく3軸磁気データを取得する磁気データ取得ステップと、3軸加速度センサが検出した3軸加速度センサ信号に基づく3軸加速度データを取得する加速度データ取得ステップと、前記3軸磁気データと、前記3軸加速度データとに基づいて回転軸情報を演算する回転軸情報演算ステップと、前記回転軸情報と、前記3軸磁気データ及び/又は前記3軸加速度データとに基づいて回転量情報を演算する回転量情報演算ステップと、前記回転軸情報と、前記回転量情報とに基づいて角速度ベクトル情報を演算する角速度ベクトル情報演算ステップとを有し、前記回転軸情報演算ステップは、前記3軸磁気データの分布から求まる第1の平面と前記3軸加速度データの分布から求まる第2の平面とが互いに平行となることを条件として算出される平面の法線を前記回転軸情報として演算することを特徴とする。
【0019】
また、請求項2に記載の発明は、請求項1に記載の発明において、前記算出される平面が、前記3軸磁気データの前記第1の平面からの距離の2乗と、前記3軸加速度データの前記第2の平面からの距離の2乗の和が最小となる平面であることを特徴とする。
【0020】
また、請求項3に記載の発明は、請求項1又は2に記載の発明において、前記3軸磁気データ、前記3軸加速度データ、前記回転軸情報、前記回転量情報及び前記角速度ベクトル情報のうち少なくとも1つに基づいて角速度ベクトル情報の信頼性を評価し信頼性指標を演算する信頼性指標演算ステップを有することを特徴とする。
【0021】
また、請求項4に記載の発明は、請求項3に記載の発明において、前記角速度ベクトル情報と前記信頼性指標とに基づいて制御角速度ベクトル情報を出力する角速度ベクトル情報出力制御ステップを有することを特徴とする。
【0022】
また、請求項5に記載の発明は、3軸磁気センサ信号を出力する3軸磁気センサと、3軸加速度センサ信号を出力する3軸加速度センサと、前記3軸磁気センサにより検出された前記3軸磁気センサ信号に基づく3軸磁気データと、前記3軸加速度センサにより検出された前記3軸加速度センサ信号に基づく3軸加速度データとに基づいて回転軸情報を演算する回転軸情報演算部と、前記回転軸情報と、前記3軸磁気データ及び/又は前記3軸加速度データとに基づいて回転量情報を演算する回転量情報演算部と、前記回転軸情報と、前記回転量情報とに基づいて角速度ベクトル情報を演算する角速度ベクトル情報演算部とを備え、前記回転軸情報演算部は、前記3軸磁気データの分布から求まる第1の平面と前記3軸加速度データの分布から求まる第2の平面とが互いに平行となることを条件として算出される平面の法線を前記回転軸情報として演算することを特徴とする。
【0023】
また、請求項6に記載の発明は、請求項5に記載の発明において、前記第1の平面と第2の平面とが互いに平行となることの条件が、前記磁気データを構成する各信号の前記第1の平面からの距離の2乗と、前記加速度データを構成する各信号の前記第2の平面からの距離の2乗の和が最小となる平面であることを特徴とする。
【0024】
また、請求項7に記載の発明は、請求項5又は6に記載の発明において、前記3軸磁気センサ信号、前記3軸加速度センサ信号、前記第1補正磁気信号、前記第1補正加速度信号、前記第2補正磁気信号、前記第2補正加速度信号、前記回転軸情報、前記回転量情報及び前記角速度ベクトル情報のうち少なくとも1つに基づいて、角速度ベクトル情報の信頼性を評価して信頼性指標を演算する信頼性指標演算部を備えていることを特徴とする。
【0025】
また、請求項8に記載の発明は、請求項7に記載の発明において、前記角速度ベクトル情報と前記信頼性指標とが入力されて制御角速度ベクトル情報を出力する角速度ベクトル情報出力制御部を備えていることを特徴とする。
【0026】
また、請求項9に記載の発明は、前記3軸磁気センサから取得された3軸磁気センサ信号と、前記3軸加速度センサから取得された3軸加速度センサ信号とをコンピュータを用いて請求項1乃至4のいずれかに記載の各演算ステップを実行させるためのプログラムである。
【0027】
また、請求項10に記載の発明は、請求項9に記載の各演算ステップを実行させるためのプログラムを記録したコンピュータ読み取り可能な記録媒体である。
【発明の効果】
【0028】
本発明によれば、携帯機器の分野において既に広く搭載されている磁気センサや加速度センサを用いる事で、新たに角速度を計測するためのジャイロセンサを搭載する必要が無いため、新規にジャイロセンサを搭載する場合と比較してコストや実装の面積を必要とする事無く角速度を計測する事が可能となる。
【0029】
また、角速度計測装置が如何なる姿勢であっても角速度の計測が可能で、かつ連続データで検出可能な角速度検出方法及びその装置が実現できる。
【0030】
また、磁気センサからのデータと加速度センサのからのデータの両方から一つの回転軸を求めるため、磁気センサからのデータまたは加速度センサからのデータのみを用いて回転軸を求める方法に比べ、より正確かつ安定した回転軸を得ることが可能となる。
【図面の簡単な説明】
【0031】
【図1】従来の磁気式ジャイロを説明するための構成図である。
【図2】(a),(b)は、本発明に係る角速度推定についての説明図で、磁気(加速度)データのみで演算可能な場合を示している。
【図3】(a),(b)は、本発明に係る角速度推定についての説明図で、磁気(加速度)データのみでは演算できない場合を示している。
【図4】(a),(b)は、本発明に係る角速度推定についての説明図で、磁気データと加速度データを用いた場合を示している。
【図5】本発明に係る角速度検出装置の実施例1を説明するための構成図である。
【図6】実施例1における回転軸を求めるための第1の平面を示す図である。
【図7】実施例1における回転軸を求めるための第2の平面を示す図である。
【図8】実施例1における回転軸を求めるための法線方向を示す図である。
【図9】本発明に係る角速度検出装置の実施例2を説明するための構成図である。
【図10】本発明に係る角速度検出装置の実施例3を説明するための構成図である。
【図11】本発明に係る角速度検出方法を説明するためのフローチャートを示す図である。
【発明を実施するための形態】
【0032】
まず、図2(a),(b)乃至図4(a),(b)に基づいて、本発明に係る角速度推定について以下に説明する。
【0033】
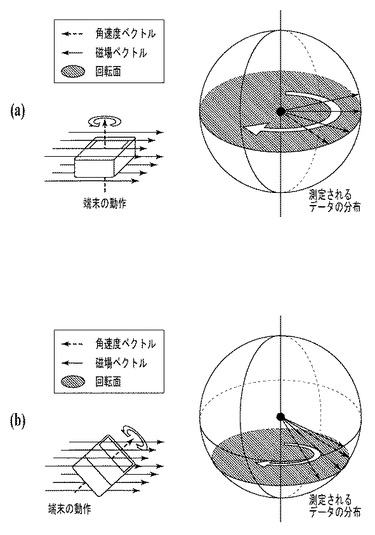
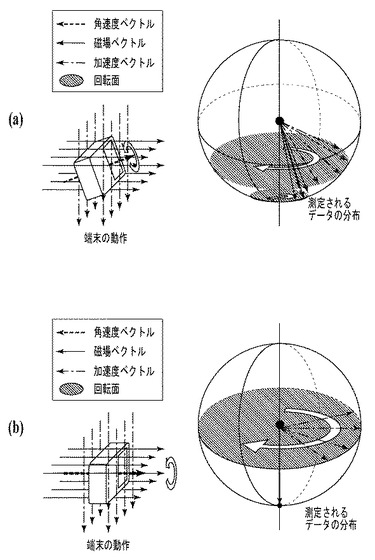
図2(a),(b)は、本発明に係る角速度推定についての説明図で、磁気(加速度)データのみで演算可能な場合を示している。図2(a)は、携帯端末が磁場ベクトルに対して平行で、角速度ベクトルが垂直である場合において測定される磁気データの分布を示している。一方、図2(b)は、携帯端末が磁場ベクトルに対して傾斜して、角速度ベクトルが傾斜している場合において測定される磁気データの分布を示している。このような状況下においては、角速度と磁場(加速度)のベクトルが平行でなく、磁場の強さが十分であり、磁場分布が均一であるので、角速度推定が可能である。
【0034】
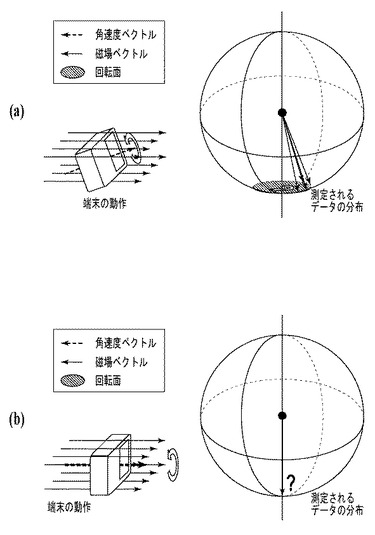
図3(a),(b)は、本発明に係る角速度推定についての説明図で、磁気(加速度)データのみでは演算できない場合を示している。図3(a)は、携帯端末が磁場ベクトルに対して傾斜しており、角速度ベクトルが傾斜している場合において測定される磁気データの分布を示している。一方、図3(b)は、携帯端末が磁場ベクトルに対して垂直で、角速度ベクトルが平行である場合において測定される磁気データの分布を示している。このような状況下においては、角速度を正確に推定することはできない。また、角速度推定の精度が低下するという問題がある。
【0035】
図4(a),(b)は、本発明に係る角速度推定についての説明図で、磁気データと加速度データを用いた場合を示している。図4(a)は、携帯端末が磁場ベクトル及び加速度ベクトルに対して傾斜しており、角速度ベクトルが傾斜している場合において測定される磁気データと加速度データの分布を示している。一方、図4(b)は、携帯端末が磁場ベクトルに対して垂直で、加速度ベクトルに対して平行であり、角速度ベクトルが磁場ベクイトルと一致している場合において測定される磁気データ及び加速度データの分布を示している。このような状況下においては、どちらのベクトルと回転軸とが一致してしまっていても、一方のベクトルと一致していなければ回転軸が得られる。したがって、本発明は、上述した図4(a),(b)の場合における角速度検出を可能としたものである。
【0036】
以下、図面を参照して本発明の各実施例について説明する。
【実施例1】
【0037】
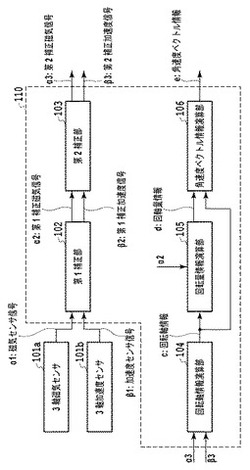
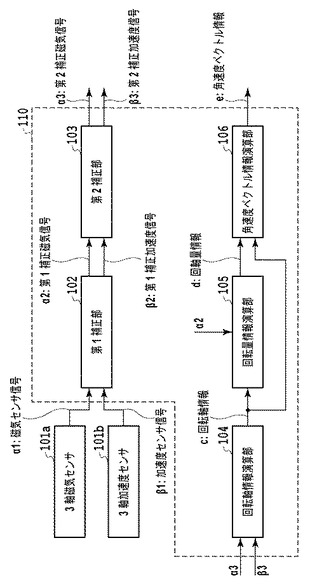
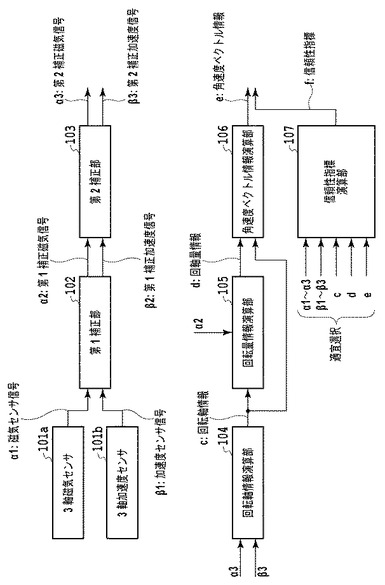
図5は、本発明に係る角速度検出装置の実施例1を説明するための構成図で、図中符号101aは3軸磁気センサ、101bは3軸加速度センサ、102は第1補正部、103は第2補正部、104は回転軸情報演算部、105は回転量情報演算部、106は角速度ベクトル情報演算部、110は演算処理部(CPU)を示している。
【0038】
本発明に係る実施例1の角速度検出装置は、3軸磁気センサ101aと3軸加速度センサ101bと、これらのセンサからのデータを演算処理する演算処理部110とから構成されている。この演算処理部110は、第1補正部102と第2補正部103と回転軸情報演算部104と回転量情報演算部105と角速度ベクトル情報演算部106とで構成され、具体的にはコンピュータ処理されるCPUである。
【0039】
3軸磁気センサ101aは3軸磁気センサ信号(磁気センサ信号)α1を出力するもので、3軸加速度センサ101bは3軸加速度センサ信号(加速度センサ信号)β1を出力するものである。また、第1補正部102は、磁気センサ信号α1及び加速度センサ信号β1が入力され、第1補正磁気信号α2及び第1補正加速度信号β2を出力するものである。また、第2補正部103は、第1補正磁気信号α2及び第1補正加速度信号β2が入力され、第2補正磁気信号α3及び第2補正加速度信号β3を出力するものである。また、回転軸情報演算部104は、第2補正磁気信号α3及び第2補正加速度信号β3が入力され、回転軸情報cを出力するものである。また、回転量情報演算部105は、回転軸情報cと、第1補正磁気信号α2とが入力され、回転量情報dを出力するものである。また、角速度ベクトル情報演算部106は、回転軸情報cと回転量情報dとが入力され、角速度ベクトル情報eを出力するものである。
【0040】
本発明において回転軸情報cとは、任意の3次元空間において角速度検出装置が回転運動したときの回転軸を直接示す信号またはデータや、回転軸と一定の対応関係を示す信号またはデータを意味する。また本発明において回転量情報dとは、3次元空間において角速度検出装置が回転運動したときの単位時間当たりの回転量を直接示す信号またはデータや、回転量と一定の対応関係を示す信号またはデータを意味する。また本発明において角速度ベクトル情報eとは、3次元空間において角速度検出装置が回転運動したときの角速度ベクトルを直接示す信号またはデータや、角速度ベクトルと一定の対応関係を示す信号またはデータを意味する。
【0041】
本発明において、信号とは、ある情報を伝達するための符号であれば特に制限されず、アナログ信号であっても良いし、ディジタル信号であっても良い。
【0042】
以下、磁気センサ信号α1と第1補正磁気信号α2と第2補正磁気信号α3のいずれかに基づく3軸の時系列データを3軸磁気データh、加速度センサ信号β1と第1補正加速度信号β2と第2補正加速度信号β3のいずれかに基づく3軸の時系列データを3軸加速度データaと表す。
【0043】
また、本実施例における演算処理部110の各部、すなわち、第1補正部102と第2補正部103と回転軸情報演算部104と回転量情報演算部105と角速度ベクトル情報演算部106は、各々必要に応じて時系列データの過去の値を記憶する記憶手段を有しているものとする。
【0044】
以下に、各構成要素についてさらに具体的に説明する。
【0045】
<3軸磁気センサ>
3軸磁気センサ101aは、任意の3次元空間を構成する3つの軸各々の方向の磁気に応じた磁気センサ信号α1を出力することが可能なセンサであれば特に制限されず、例えば、ホール素子や磁気抵抗効果素子や磁気インピーダンス素子を用いたものなど既存の磁気センサが挙げられるがこれに制限されない。また、測定される磁気としては、地磁気であってもよいし、人為的に発生させた磁場による磁気であってもよい。
【0046】
また、3軸磁気センサにおける任意の3次元空間を構成する3軸としては、3軸が全て同一平面に存在する軸の組み合わせでなければ特に制限されない。3軸が構成する座標系は、直交座標系であってもよいし、斜交座標系であってもよい。
【0047】
なお、斜交座標系の場合、後述の角速度ベクトル情報が出力される以前に直交座標系に座標変換を行えばよい。
【0048】
<3軸加速度センサ>
3軸加速度センサ101bは、任意の3次元空間を構成する3つの軸各々の方向の加速度に応じた加速度センサ信号β1を出力することが可能なセンサであれば特に制限されず、例えば、コイルバネや板バネを用いた機械式加速度センサや、光学式加速度センサや、静電容量型、ピエゾ抵抗型、ガス温度分布型等の半導体式加速度センサなど、既存の加速度センサが挙げられるがこれらに制限されない。
【0049】
また、3軸加速度センサにおける任意の3次元空間を構成する3軸としては、3軸が全て同一平面に存在する軸の組み合わせでなければ特に制限されない。3軸が構成する座標系は、直交座標系であってもよいし、斜交座標系であってもよい。なお、斜交座標系の場合、後述する角速度ベクトル情報が出力される以前に直交座標系に座標変換を行えばよい。
【0050】
また、3軸加速度センサにおける任意の3次元空間を構成する3つの軸は、3軸磁気センサにおける任意の3次元空間を構成する3つの軸と同じ軸であっても良いし、異なる軸であっても良い。異なる軸である場合は、後述する回転軸演算部にて回転軸を演算する以前に同軸になるように座標変換を行えばよい。
【0051】
<第1補正部>
第1補正部102は、磁気センサ信号α1及び/又は加速度センサ信号β1を、例えば、感度やオフセットの観点から補正し、第1補正磁気信号α2及び/又は第1補正加速度信号β2を出力する。第1補正部102によって、磁気センサの感度ばらつきを低減させたり、オフセット量を加減算して正味の磁気及び加速度を示す信号に近づけることにより、高精度に回転軸、回転量及び角速度ベクトル情報を演算することが可能になる。
【0052】
例えば、3軸磁気センサ101aや3軸加速度センサ101b自体が信号を補正する機能を有する場合(例えば、補正ICを内蔵している場合)は、第1補正部102を設ける必要は無い。この様に、3軸磁気センサ101a及び3軸加速度センサ101b自体が信号を補正する機能を有している場合は、磁気センサ信号α1及び加速度センサ信号β1を以下の説明における第1補正磁気信号α2,第1補正加速度信号β2として扱う。
【0053】
<第2補正部>
第2補正部103は、第1補正磁気信号α2や第1補正加速度信号β2のそれぞれからなる一定量の群の分布のバラツキを低減する補正をして出力する機能を有するものである。分布のバラツキを低減する手段としては、例えば、単純移動平均、加重移動平均、指数移動平均などの線形フィルタによる平均化処理や中間値フィルタ、最頻値フィルタなどの非線形フィルタによる選択処理が挙げられるがこれらに限定はされない。
【0054】
例えば、本発明に係る角速度検出装置の回転に伴う第1補正磁気信号α2や第1補正加速度信号β2の変化と比較して第1補正磁気信号α2や第1補正加速度信号β2に含まれるノイズが十分に小さい場合、第2補正部103を設ける必要は無い。この様に、第1補正磁気信号α2や第1補正加速度信号β2に含まれるノイズが十分に小さい場合は、磁気信号α2及び加速度信号β2を以下の説明における第2補正磁気信号α3,第2補正加速度信号β3として扱う。
【0055】
<回転軸情報演算部>
回転軸情報演算部104は、前記3軸磁気データh及び3軸加速度データaに基づいて回転軸情報cを演算する。
【0056】
本発明の実施例1における回転軸情報演算部104は、3軸磁気データh及び3軸加速度データaとして第2補正磁気信号α3と第2補正加速度信号β3に基づく時系列データを用いているが、第2補正部103が存在しない場合は、3軸磁気データh及び3軸加速度データaとして第1補正磁気信号α2と第1補正加速度信号β2に基づく時系列データを用いて回転軸情報cを演算することも可能である。また、3軸磁気センサ101aや3軸加速度センサ101b自体が信号を補正する機能を有している場合は、3軸磁気データh及び3軸加速度データaとして磁気センサ信号α1と加速度センサ信号β1に基づく時系列データを用いて回転軸情報cを演算することも可能である。
【0057】
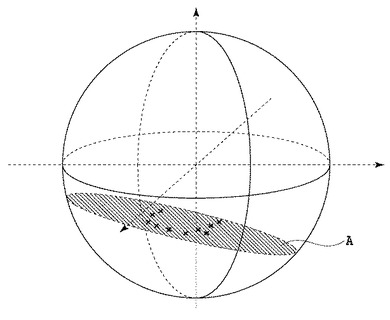
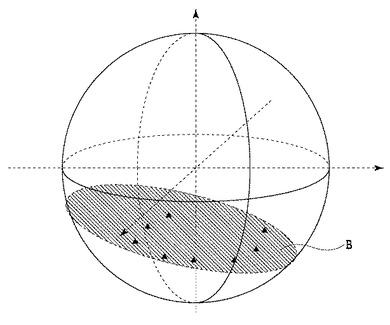
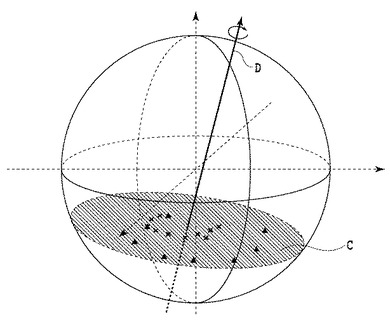
回転軸を求めるための具体的な方法の一例としては、以下の方法が挙げられる。すなわち、3軸磁気データhの分布から求まる第1の平面(図6のA)と、3軸加速度データaの分布から求まる第2の平面(図7のB)とが平行になることを条件として算出される平面(図8のC)の法線方向(図8のD)を回転軸として演算する方法である。このとき、第1の平面Aと第2の平面Bとが平行となることの条件としては、例えば、3軸磁気データhの第1の平面Aからのずれ量の2乗と、3軸加速度データaの第2の平面Bからのずれ量の2乗の和が最小となる平面を求める方法が適用可能である。
【0058】
<回転量情報演算部>
回転量情報演算部105は、回転軸情報演算部104により演算された回転軸情報cと、3軸磁気データh及び/又は3軸加速度データaとに基づいて回転量情報dを演算する。
【0059】
本発明の実施例1における回転量情報演算部105は、角速度ベクトル情報の精度と応答性の観点から3軸磁気データhとして第1補正磁気信号α2に基づく時系列データを用いているが、3軸磁気データhとして磁気センサ信号α1または第2補正磁気信号α3に基づく3軸の時系列データを用いる事も可能である。また、3軸加速度データaとしては加速度センサ信号β1と第1補正加速度信号β2と第2補正加速度信号β3のいずれかに基づく3軸の時系列データを用いることが可能である。
【0060】
<角速度ベクトル情報演算部>
角速度ベクトル情報演算部106は、回転軸情報演算部104により演算された回転軸情報cと、回転量情報演算部105により演算された回転量情報dとに基づいて角速度ベクトル情報eを演算する。
【0061】
つまり、角速度ベクトル情報演算部106には、回転軸情報cと回転量情報dとが入力され、それらに基づいて角速度ベクトル情報eを演算している。角速度ベクトル情報eは、回転軸情報cと回転量情報dの積を回転に要した時間で割る事で得られる。また、角速度ベクトル情報eを演算する際に、回転量情報dの過去の値を時系列データとして保持しておきその平均を回転量情報dの代わりに用いて角速度ベクトル情報eを演算して用いても良い。
【実施例2】
【0062】
図9は、本発明に係る角速度検出装置の実施例2を説明するための構成図で、図中符号107は信頼性指標演算部を示している。なお、図5に示した構成要素と同じ機能を有する構成要素には同一も符号を付してある。
【0063】
本発明の実施例2における角速度検出装置は、上述した実施例1の角速度検出装置に加えて、信頼性指標演算部107を更に備えている。なお、信頼性指標演算部107は、上述した演算処理部110に組み込まれている。
【0064】
信頼性指標演算部107により演算される信頼性指標fは、角速度ベクトル情報eの信頼性の指標として用いることができ、例えば、角速度検出装置外の装置やプログラムにより、出力された角速度ベクトル情報eを実際に使用するかどうかの判断や、角速度ベクトル情報eの補正に用いることができる。
【0065】
以下、3軸磁気データh及び3軸加速度データaを実施例1と同様に定義する。
【0066】
また、本実施例における演算処理部110の各部、すなわち第1補正部102と第2補正部103と回転軸情報演算部104と回転量情報演算部105と角速度ベクトル情報演算部106と信頼性指標演算部107は、各々必要に応じて時系列データの過去の値を記憶する記憶手段を有しているものとする。
【0067】
<信頼性指標演算部>
信頼性指標演算部107には、上述した実施例1の角速度ベクトル情報演算部106を構成する要素の出力信号である磁気センサ信号α1、加速度センサ信号β1、第1補正磁気信号α2、第1補正加速度信号β2、第2補正磁気信号α3、第2補正加速度信号β3、回転軸情報c、回転量情報d、角速度ベクトル情報eから信頼性を評価するうえで有効な信号が適宜入力されて信頼性指標fを演算する。
【0068】
信頼性を評価する方法としては、例えば、磁気ベクトルの絶対値の変動を信頼性の指標とする方法が挙げられる。磁気ベクトルの絶対値の変動が大きい場合、周囲の磁場強度が均一でないことを示しており、この場合の信頼性は低いと判断できる。反対に磁気ベクトルの絶対値の変動が小さい場合、周囲の磁場強度は均一であることを示しており、この場合の信頼性は高いと判断できる。
【0069】
また、磁気ベクトルと回転軸ベクトルのなす角及び加速度ベクトルと回転軸ベクトルのなす角を信頼性の指標とする方法が挙げられる。磁気ベクトルと回転軸ベクトルのなす角及び加速度ベクトルと回転軸ベクトルのなす角がいずれも0°又は180°に近い場合、磁気データと加速度データの分布範囲が狭い事を示しており、この場合の信頼性は低いと判断できる。反対に磁気ベクトルと回転軸ベクトルのなす角及び加速度ベクトルと回転軸ベクトルのなす角のいずれかが90°に近い場合、磁気データまたは加速度データの分布範囲が広い事を示しており、この場合の信頼性は高いと判断できる。
【0070】
その他、加速度ベクトルの絶対値から重力加速度に相当する1Gを差し引いた値を信頼性の指標とする方法や磁気ベクトルと加速度ベクトルのなす角を信頼性の指標とする方法、上述した信頼性の指標を複数組み合わせたものを最終的な信頼性の指標とする方法などが挙げられる。
【実施例3】
【0071】
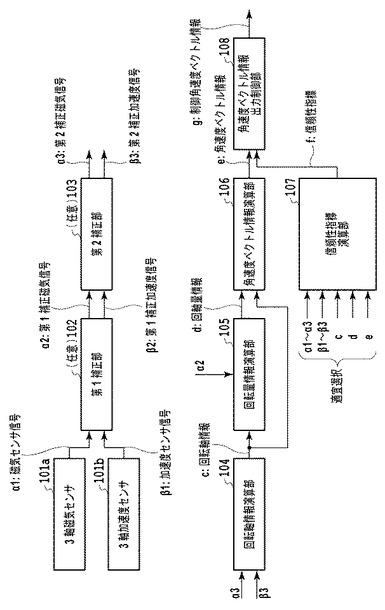
図10は、本発明に係る角速度検出装置の実施例3を説明するための構成図で、図中符号108は角速度ベクトル情報出力制御部を示している。なお、図9に示した構成要素と同じ機能を有する構成要素には同一も符号を付してある。
【0072】
本発明の実施例3における角速度検出装置は、上述した実施例2の角速度検出装置に加えて、角速度ベクトル情報出力制御部108を更に備えている。なお、角速度ベクトル情報出力制御部108は、上述した演算処理装置110に組み込まれている。
【0073】
以下、3軸磁気データh及び3軸加速度データaを実施例1と同様に定義する。
【0074】
また、本実施例における演算処理部110の各部、すなわち第1補正部102と第2補正部103と回転軸情報演算部104と回転量情報演算部105と角速度ベクトル情報演算部106と信頼性指標演算部107と角速度ベクトル情報出力制御部108は、各々必要に応じて時系列データの過去の値を記憶する記憶手段を有しているものとする。
【0075】
<角速度ベクトル情報出力制御部>
角速度ベクトル情報出力制御部108は、角速度ベクトル情報eと信頼性指標fが入力され、制御角速度ベクトル情報gを出力している。角速度ベクトル情報出力制御部108では、信頼性指標fに基づいて制御角速度ベクトル情報gを出力するか否かを制御したり、制御角速度ベクトル情報gを補正制御したりすることが可能である。
【0076】
制御角速度ベクトル情報gを生成する方法としては、例えば、信頼性指標fにより角速度ベクトル情報eの信頼性が低いと判断された際に、信頼性が高い過去の値を制御角速度ベクトル情報gとして採用する方法や、信頼性指標fにより角速度ベクトル情報eの信頼性が低いと判断された際は、予め指定したエラー値を制御角速度ベクトル情報gとして採用するといった方法が挙げられる。
【0077】
このようにして、角速度計測装置(携帯端末)が如何なる姿勢であっても角速度の計測が可能で、かつ連続データで検出可能な角速度検出装置が実現できる。
【0078】
次に、本発明に係る角速度検出方法について以下に説明する。
【0079】
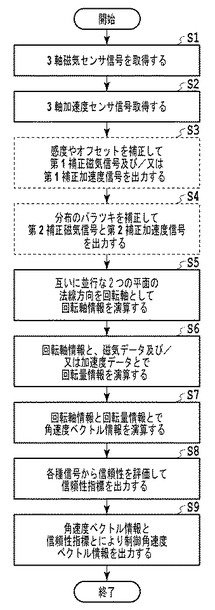
図11は、本発明に係る角速度検出方法を説明するためのフローチャートを示す図である。まず、3軸磁気センサ信号α1を取得する(磁気センサ信号取得ステップ;S1)とともに、3軸加速度センサ信号β1を取得する(加速度センサ信号取得ステップ;S2)。
【0080】
次に、磁気信号取得ステップS1で取得された3軸磁気センサ信号α1及び/又は加速度信号取得ステップS2で取得された3軸加速度センサ信号β1を、感度やオフセットを補正して第1補正磁気信号α2及び/又は第1補正加速度信号β2を出力する(第1補正ステップ;S3)と、第1補正磁気信号α2や第1補正加速度信号β2のそれぞれからなる一定量の群の分布のバラツキを補正して第2補正磁気信号α3と第2補正加速度信号β3を出力する(第2補正ステップ;S4)とを選択的に使用する。
【0081】
次に、磁気センサ信号α1と第1補正磁気信号α2と第2補正磁気信号α3のいずれかに基づく3軸の時系列データを3軸磁気データhと、加速度センサ信号β1と第1補正加速度信号β2と第2補正加速度信号β3のいずれかに基づく3軸の時系列データを3軸加速度データaとに基づいて回転軸情報cを演算する(回転軸情報演算ステップ;S5)。次に、回転軸情報演算ステップで演算された回転軸情報cと、3軸磁気データh及び/又は3軸加速度データaとに基づいて回転量情報dを演算する(回転量情報演算ステップ;S6)。
【0082】
次に、回転軸情報演算ステップにより演算された回転軸情報cと、回転量情報演算ステップにより演算された回転量情報dとに基づいて角速度ベクトル情報eを演算する(角速度ベクトル情報演算ステップ;S7)。
【0083】
上述した回転軸情報演算ステップは、3軸磁気データhの分布から求まる第1の平面と、3軸加速度データaの分布から求まる第2の平面とが互いに平行になることを条件として算出される平面の法線を回転軸情報cとして演算する。
【0084】
また、前記算出される平面が、3軸磁気データhを構成する各3軸磁気信号の前記第1の平面からのずれ量の2乗と、3軸加速度データaを構成する各3軸加速度信号の前記第2の平面からのずれ量の2乗の和が最小となる平面である。
【0085】
次に、角速度ベクトル情報演算ステップを構成する要素の出力信号である3軸磁気センサ信号α1と3軸加速度センサ信号β1と第1補正磁気信号α2と第1補正加速度信号β2と第2補正磁気信号α3と第2補正加速度信号β3と回転軸情報cと回転量情報dと角速度ベクトル情報eのいずれかから信頼性を評価して信頼性指標fを演算する(信頼性指標演算ステップ;S8)。次に、角速度ベクトル情報eと信頼性指標fとが入力されて制御角速度ベクトル情報gを出力する(角速度ベクトル情報出力制御ステップ;S9)。
【0086】
このようにして、角速度計測装置(携帯端末)が如何なる姿勢であっても角速度の計測が可能で、かつ連続データで検出可能な角速度検出方法が実現できる。
【0087】
次に、上述した実施例1に示した角速度検出装置を用いて本発明の角速度ベクトル情報演算方法について具体的に説明する。
【0088】
<角速度ベクトル情報の演算方法>
3次元空間内に分布する、各々n(nは3以上)個の点からなる2つの点の集合χおよび集合ρを、互いに平行な第1の平面と第2の平面によって最小二乗当てはめし、前記第1の平面及び前記第2の平面の法線ベクトルを求めるための演算方法を説明する。
【0089】
3次元空間内の平面は、一般に下記式(2)で表される。
【0090】
【数1】

【0091】
ここで、wは平面の法線ベクトルである。法線ベクトルwは長さが1の単位ベクトルであると仮定しても一般性を失わないので、以下の説明では下記式(3)の条件の下で説明をする。
【0092】
|w|=1 ・・・(3)
前記第1の平面を前記式(2)で表される法線w及びδχを用いて表し、前記第2の平面を前記式(2)で表される法線w及びδρを用いて表すと下記式(4)となる。
【0093】
【数2】
【0094】
以下、i=1〜nとして集合χの元をχi(χix、χiy、χiz)、集合ρの元をρi(ρix、ρiy、ρiz)と表すことにし、前記式(4)で表される前記第1の平面からのχiのずれをSχi、前記式(4)で表される前記第2の平面からのρiのずれをSρiと表す事にすると、Sχi及びSρiは下記式(5)となる。
【0095】
【数3】
【0096】
従って、集合χの各元と第1の平面のずれと集合ρの各元と第2の平面のずれの総和が最小二乗となる平面の条件を求めるには、下記式(6)が最小値を取る条件を求めれば良い事になる。
【0097】
【数4】
【0098】
ここで、ラグランジュの未定乗数λを導入して前記式(3)の条件を取り込むと、下記式(7)及び(8)が最小二乗平面の条件である。
【0099】
【数5】
【0100】
【数6】
【0101】
まずαについての偏微分を計算すると下記式(9)が得られる。
【0102】
【数7】
【0103】
同様にしてβ、γによる偏微分を計算し、ベクトル・行列形式に書き直すと、下記式(10)が得られる。
【0104】
【数8】
【0105】
また、δによる偏微分の項は、下記式(11)となる。
【0106】
【数9】
【0107】
ここで、集合χの元の平均値χ(上付き−)および集合ρの元の平均値ρ(上付き−)を下記式(12)で、集合χの各々の元の平均値からのずれχ(上付き〜)、および集合ρの各々の元の平均値からのずれρ(上付き〜)を下記式(13)で表すことにする。
【0108】
【数10】
【0109】
【数11】
【0110】
前記式(11)は、前記式(12)(13)より、下記式(14)に変形できる。
【0111】
【数12】
【0112】
ここで、前記式(8)の条件から、下記式(15)が得られる。
【0113】
【数13】
【0114】
上記式(15)を用いて前記式(10)の後ろの項を計算すると、下記式(16)となる。
【0115】
【数14】
【0116】
ここで、下記式(17)および(18)から、下記式(19)となる。
【0117】
【数15】
【0118】
【数16】
【0119】
【数17】
【0120】
上記式(19)を用いて、前記式(10)を整理すると、下記式(20)となる。
【0121】
【数18】
【0122】
従って、前記式(8)の条件は下記式(21)とまとめることが出来る。
【0123】
【数19】
【0124】
ここで、前記式(21)を簡潔に表すため、前記式(20)に含まれる行列を下記式(22)で表される記号Gを導入して書き直すと下記式(23)が得られる。
【0125】
【数20】
【0126】
【数21】
【0127】
つまり、行列Gの固有ベクトルを求めれば所望の法線ベクトルwを得ることができる。ただし、法線ベクトルwは下記式(24)を満たす必要がある。
【0128】
【数22】
【0129】
行列Gは実対称行列であるので、既知のQR法などを用いて簡単に固有値・固有ベクトルを求める事ができる。
【0130】
本実施例では回転軸情報演算部104に入力される3軸磁気データh及び3軸加速度データaが集合χおよび集合ρに相当する。また、以上の演算により得られる法線ベクトルwが回転軸情報演算部104により演算される回転軸情報cに相当する。
【0131】
<回転量の演算方法>
3次元空間内の任意の2点間の、任意の回転軸周りの回転量を求めるには、前記任意の2点を前記任意の回転軸に垂直な平面へ射影し、射影された2点と前記任意の回転軸が前記垂直な平面上でなす角を求めれば良い。
【0132】
従って、前記任意の2点をr1、r2、前記回転軸の向きを表す単位ベクトルをR0と表すと、r1をr1’、r2’は下記式(25)で与えられ、前記回転量をQで表すと下記式(26)のようになる。
【0133】
【数23】
【0134】
【数24】
【0135】
本実施例では回転量情報演算部105に入力される3軸磁気データhを構成するデータのうち、時系列において隣り合った2データが前記任意の2点r1、r2に相当し、回転軸情報演算部104により演算される回転軸情報cが前記回転軸R0に相当する。また、前記式(26)で表される回転量Qが回転量情報演算部105により演算される回転量情報dに相当する。
【0136】
回転量情報dとしては前記式(26)で表される回転量Qをそのまま用いても良いし、回転量Qに対し平均化処理などを行ったものを用いても良い事は前述の通りである。
【0137】
<角速度ベクトル情報の演算方法>
角速度ベクトルはその向きが回転軸の向きであり、その大きさが単位時間当たりの回転量であるベクトルである。
【0138】
従って、前記回転軸の向きを表す単位ベクトルをR0と表し、前記回転量をQと表し、前記回転量に要した時間をTと表し、前記角速度ベクトルをRと表すと下記式(27)のようになる。
【0139】
【数25】
【0140】
本実施例では、回転軸情報演算部104により演算された回転軸情報cが前記回転軸の向きを表す単位ベクトルをR0に相当し、回転量情報演算部105により演算された回転量情報dが前記回転量Qに相当し、回転量情報dを演算する際に用いた前記3軸磁気データhを構成するデータのうち時系列において隣り合った2データ間の時間差が前記時間をTに相当する。また、前記式(27)により演算された角速度ベクトルRが角速度ベクトル演算部106により演算される角速度ベクトル情報eに相当する。
【0141】
このようにして、角速度計測装置(携帯端末)が如何なる姿勢であっても角速度の計測が可能で、かつ連続データで検出可能な角速度検出方法が実現できる。
【0142】
<信頼性指標の演算方法>
次に、上述した実施例3に示した角速度検出装置を用いて本発明の信頼性指標演算方法ついて具体的に説明する。
【0143】
具体的には、第2補正部103により演算された第2補正磁気信号α3からなる時系列の3軸磁気データhと、第2補正加速度信号β3からなる時系列の3軸加速度データaと、回転軸情報演算部104により演算された回転軸情報cと、角速度ベクトル情報演算部105により演算された角速度ベクトル情報eを用いて信頼性指標を演算する方法である。
【0144】
回転軸の向きを表す単位ベクトルと磁気ベクトルの平行度を表す指標をq、回転軸の向きを表す単位ベクトルと加速度ベクトルの平行度を表す指標をpと表すこととし、下記式(28)で定義する。
【0145】
【数26】
【0146】
前記式(28)で定義される指標をq及びpの時刻jにおける値を各々qj、pjと表し、さらに、各々の平均値をqj(上付き−)、pj(上付き−)で表すこととする。下記式(29)で与えられる第1の信頼性指標f1を算出する。下記式(29)内の第1の信頼性指標f1に付けられた添え字jは時刻jにおける値である事を示す。
【0147】
【数27】
【0148】
続いて、回転軸の向きを表す単位ベクトルと磁気ベクトルの平行度qおよび角速度ベクトルRを用いて、下記式(30)で与えられる第2の信頼性指標f2を算出する。ただし、KおよびCは重み付けの定数であり、例えばK=720、C=1000を用いる。下記式(30)内の角速度ベクトルR及び第2の信頼性指標f2に付けられた添え字jは時刻jにおける値である事を示す。
【0149】
【数28】
【0150】
前記式(29)により演算されたf1及び前記式(30)により演算されたf2が信頼性指標演算部107により演算される信頼性指標fに相当する。
【0151】
<制御角速度ベクトル情報の生成方法>
次に、上述した実施例3に示した角速度検出装置を用いて本発明の制御角速度ベクトル情報の生成方法について具体的に説明する。
【0152】
具体的には、信頼性指標演算部107により演算される信頼性指標fと角速度ベクトル情報演算部106により演算される角速度ベクトル情報eを用いて制御角速度ベクトル情報gを生成する方法である。
【0153】
以下の説明では、信頼性指標演算部107により演算される信頼性指標fとして、例えば、前記式(29)により演算された第1の信頼性指標f1及び前記式(30)により演算された第2の信頼性指標f2を、角速度ベクトル情報演算部106により演算される角速度ベクトル情報eとして、例えば、前記式(27)により演算された角速度ベクトルRを用いた場合の演算を示す。
【0154】
前記式(29)により演算された第1の信頼性指標f1の値が第1の信頼性指標の閾値TH1(例えばTH1=0.25を用いる)以上、または、前記式(30)により演算された第2の信頼性指標f2の値が第2の信頼性指標の閾値TH2(例えばTH2=0.98を用いる)以上の場合、下記式(31)に従い制御角速度ベクトル情報gを生成する。ただし、下記式中のUは制御角速度ベクトル情報gの補正のための定数であり、例えば
U=0.9を用いる。下記式(31)内の角速度ベクトルR及び制御角速度ベクトル情報gに付けられた添え字jは時刻jにおける値である事を示し、添え字j−1は時刻jよりも1つ過去の値である事を示す。
【0155】
【数29】
【0156】
前記式(31)により演算されたgiが角速度ベクトル情報出力制御部108により演算される制御角速度ベクトル情報gに相当する。
【0157】
なお、上述した各ステップは、コンピュータを用いて実行させるためのプログラムとして構成することが可能である。また、上述した各ステップを実行させるためのプログラムを記録したコンピュータ読み取り可能な記録媒体として構成することも可能である。
【符号の説明】
【0158】
1 磁気式ジャイロ
3 メモリ
6 回転速度判別手段
7 角速度算出手段
8 出力手段
11 コンピュータ
21 3軸磁気センサ
22 3軸加速度センサ
41 第1回転軸決定手段
42 第2回転軸決定手段
51 第1回転角度算出手段
52 第2回転角度算出手段
101a 3軸磁気センサ
101b 3軸加速度センサ
102 第1補正部
103 第2補正部
104 回転軸情報演算部
105 回転量情報演算部
106 角速度ベクトル情報演算部
107 信頼性指標演算部
108 角速度ベクトル情報出力制御部
110 演算処理部(CPU)
【技術分野】
【0001】
本発明は、角速度検出方法及びその装置に関し、より詳細には、角速度計測装置(携帯端末)が如何なる姿勢であっても角速度の検出が可能で、かつ連続データで検出可能な角速度検出方法及びその装置に関する。
【背景技術】
【0002】
一般に、ジャイロスコープ(gyroscope)とは、物体の角度や角速度(物体や質点の回転の速さを表す量であり、角度と時間の商で定義される。)を検出する計測器で、ジャイロと略されることもあり、また、ジャイロセンサと呼ばれることもある。従来から船や航空機やロケットの自律航法に使用され、最近ではカーナビゲーションシステムや自動運転システム、ロボット、デジタルカメラ、無人偵察機などでも用いられている。
【0003】
このジャイロスコープの種類としては、機械式(回転型,振動型)、流体式(ガス型)、光学式(光ファイバ,リングレーザー)などが一般的である。一方、これらのジャイロスコープを用いずに、携帯機器の分野において既に広く搭載されている磁気センサや加速度センサの出力から演算によって角速度を推定して求めるジャイロ技術がある。
【0004】
磁気センサと加速度センサを用いてジャイロスコープの機能を代替するものとしては、例えば、特許文献1に記載の技術がある。特許文献1に記載の技術によれば、地磁気に対応する大きさの電圧値を出力する地磁気センサと、傾斜を検出する加速度センサ、地磁気センサから出力される電圧値に基づいて方位角を演算し、以前の方位角と比較することにより回転程度を算出した後、回転の傾斜が所定条件を満たすと、回転程度に対応する入力信号を生成する制御部と、を含む。これにより、入力装置が一定角の以上に斜めになると、回転がなかったにも係わらず入力信号が発生する事態を抑えることができる。
【0005】
また、磁気センサと加速度センサを用いて角速度を検出(推定)するものとしては、例えば、特許文献2に記載の角速度センサがある。この角速度センサは、直流及び低周波領域の信号を出力する地磁気センサと、この地磁気センサの出力を電圧変換する変換回路と、高周波領域の信号を出力する加速度センサと、この加速度センサの出力を積分する積分回路と、変換回路の出力と積分回路の出力とから角速度を算出する角速度算出手段とを備えたものである。
【0006】
また、特許文献3に記載されている従来の方位角計測装置は、磁気センサのみを用いた角速度推定を行なうものである。この従来の方位角計測装置は、3軸磁気センサと、磁気センサ駆動電源部と、マルチプレクサ部と、磁気センサ増幅部と、磁気センサA/D変換部と、感度・オフセット補正部と回転角度算出部とが設けられている。3軸磁気センサには、x軸磁気センサ、y軸磁気センサ及びz軸磁気センサが設けられている。マルチプレクサ部は、x軸磁気センサ、y軸磁気センサ及びz軸磁気センサをそれぞれ切り換えるためのもので、磁気センサ駆動電源部から出力された駆動電圧を、x軸磁気センサ、y軸磁気センサ及びz軸磁気センサにそれぞれ印加し、x軸磁気センサ、y軸磁気センサ及びz軸磁気センサから出力されたセンサ信号を時分割的に磁気センサ増幅部に出力する。磁気センサ増幅部は、x軸磁気センサ、y軸磁気センサ及びz軸磁気センサからのセンサ信号を増幅させて、磁気センサA/D変換部に出力する。磁気センサA/D変換部は、磁気センサ増幅部によって増幅されたx軸磁気センサ、y軸磁気センサ及びz軸磁気センサからのセンサ信号をA/D変換し、変換したディジタルデータをそれぞれx軸地磁気測定データ、y軸地磁気測定データ及びz軸地磁気測定データとして感度・オフセット補正部に出力する。感度・オフセット補正部は、磁気センサA/D変換部からのx軸地磁気測定データ、y軸地磁気測定データ及びz軸地磁気測定データに基づいて、x軸磁気センサ、y軸磁気センサ及びz軸磁気センサのオフセット及び感度補正係数を算出し、算出したオフセット及び感度補正係数に基づいて、x軸地磁気測定データ、y軸地磁気測定データ及びz軸地磁気測定データを補正する。回転角度算出部は、感度・オフセット補正部からのx軸地磁気測定データ、y軸地磁気測定データ及びz軸地磁気測定データに基づいて、回転軸の周りの回転角を算出するものである。
【0007】
図1は、従来の磁気式ジャイロを説明するための構成図で、特許文献4に記載されているものである。この従来の磁気式ジャイロ1は、3軸磁気センサ21と、3軸加速度センサ22と、メモリ3と、第1回転軸決定手段41と、第2回転軸決定手段42と、第1回転角度算出手段51と、第2回転角度算出手段52と、回転速度判別手段6と、角速度算出手段7と、出力手段8とを有している。
【0008】
3軸磁気センサ21は、被測定体に固定された3軸直交座標系における磁気ベクトルとして地磁気を検出する。3軸加速度センサ22は、3軸直交座標系における加速度ベクトルとして重力加速度を検出する。メモリ3は、3軸磁気センサ21によって時系列的に検出される磁気ベクトルのデータ、及び3軸加速度センサ22によって時系列的に検出される加速度ベクトルのデータを測定した瞬間の時刻情報とともに、蓄積する。
【0009】
第1回転軸決定手段41は、メモリ3に蓄積された異なる2時点以上の磁気ベクトルのデータを基に、3軸直交座標系の原点を通ると共に被測定体の回転運動の基準とする回転軸を決定する。第2回転軸決定手段42は、メモリ3に蓄積された異なる2時点以上の磁気ベクトルのデータ及び加速度ベクトルのデータを基に、3軸直交座標系の原点を通ると共に被測定体の回転運動の基準とする回転軸を決定する。
【0010】
第1回転角度算出手段51は、第1回転軸決定手段41によって決定された回転軸を中心とした被測定体の回転角度を、磁気ベクトルのデータを基に算出する。第2回転角度算出手段52は、第2回転軸決定手段42によって決定された回転軸を中心とした被測定体の回転角度を、磁気ベクトルのデータ及び加速度ベクトルのデータを基に算出する。回転速度判別手段6は、3軸磁気センサ21によって時系列的に検出される磁気ベクトルのデータを基に、被測定体が、基準となる回転速度以上の高速回転を行っているか、あるいは、基準となる回転速度未満の低速回転を行っているかを判別する。
【0011】
角速度算出手段7は、第1回転角度算出手段51又は第2回転角度算出手段52によって算出された異なる2時点間における被測定体の回転角度と、その2時点における磁気ベクトルのデータの採取時刻の差とを基に、回転軸を中心とする被測定体の回転角速度を算出する。出力手段8は、回転速度判別手段6によって、被測定体が高速回転を行っていると判断された高速モードのとき、第1回転角度算出手段51による被測定体の回転角度の算出結果を出力し、回転速度判別手段6によって、被測定体が低速回転を行っていると判断された低速モードのとき、第2回転角度算出手段52による被測定体の回転角度の算出結果を出力する。なお、符号11はコンピュータを示している。
【先行技術文献】
【特許文献】
【0012】
【特許文献1】特開2005−196797号公報
【特許文献2】特開平6−294805号公報
【特許文献3】特開2005―61969号公報
【特許文献4】特許4599502号
【発明の概要】
【発明が解決しようとする課題】
【0013】
しかしながら、上述した特許文献1に記載の技術では、1)加速度センサを用いない構成の場合、装置の保持姿勢が制限される、2)加速度センサによる傾斜補正を用いる構成の場合、運動加速度の影響を受けるため正しい出力を得られない、3)どちらの場合も水平面内での回転の検出に限られているという問題点があった。
【0014】
また、上述した特許文献2に記載の磁気センサと加速度センサで角速度推定する場合では、1)回転運動の際に複数の加速度センサにかかる加速度が異なる事を利用しているため、加速度センサを離れた位置に搭載する必要があり、構成が複雑になる。2)角速度を推定できるのは加速度センサの配置に依存した特定の軸の周りの回転のみに限定される。
【0015】
また、上述した特許文献3に記載のものは、磁気センサのデータから回転軸を求めて角速度を導出しているが、不感軸がある(回転軸と磁気の方向が平行だと回転しても出力が変わらない)という問題があった。
【0016】
また、上述した特許文献4のものは、磁気センサのデータから求まる回転軸と、加速度センサのデータから求まる回転軸とのどちらかを選択して使用しているが、データの連続性が悪い(切り替え時に不連続点が発生する)という問題があった。
【0017】
本発明は、このような問題に鑑みてなされたもので、その目的とするところは、角速度計測装置が如何なる姿勢であっても角速度の計測が可能で、かつ連続データで検出可能な角速度検出方法及びその装置を提供することにある。
【課題を解決するための手段】
【0018】
本発明は、このような目的を達成するためになされたもので、請求項1に記載の発明は、3軸磁気センサが検出した3軸磁気センサ信号に基づく3軸磁気データを取得する磁気データ取得ステップと、3軸加速度センサが検出した3軸加速度センサ信号に基づく3軸加速度データを取得する加速度データ取得ステップと、前記3軸磁気データと、前記3軸加速度データとに基づいて回転軸情報を演算する回転軸情報演算ステップと、前記回転軸情報と、前記3軸磁気データ及び/又は前記3軸加速度データとに基づいて回転量情報を演算する回転量情報演算ステップと、前記回転軸情報と、前記回転量情報とに基づいて角速度ベクトル情報を演算する角速度ベクトル情報演算ステップとを有し、前記回転軸情報演算ステップは、前記3軸磁気データの分布から求まる第1の平面と前記3軸加速度データの分布から求まる第2の平面とが互いに平行となることを条件として算出される平面の法線を前記回転軸情報として演算することを特徴とする。
【0019】
また、請求項2に記載の発明は、請求項1に記載の発明において、前記算出される平面が、前記3軸磁気データの前記第1の平面からの距離の2乗と、前記3軸加速度データの前記第2の平面からの距離の2乗の和が最小となる平面であることを特徴とする。
【0020】
また、請求項3に記載の発明は、請求項1又は2に記載の発明において、前記3軸磁気データ、前記3軸加速度データ、前記回転軸情報、前記回転量情報及び前記角速度ベクトル情報のうち少なくとも1つに基づいて角速度ベクトル情報の信頼性を評価し信頼性指標を演算する信頼性指標演算ステップを有することを特徴とする。
【0021】
また、請求項4に記載の発明は、請求項3に記載の発明において、前記角速度ベクトル情報と前記信頼性指標とに基づいて制御角速度ベクトル情報を出力する角速度ベクトル情報出力制御ステップを有することを特徴とする。
【0022】
また、請求項5に記載の発明は、3軸磁気センサ信号を出力する3軸磁気センサと、3軸加速度センサ信号を出力する3軸加速度センサと、前記3軸磁気センサにより検出された前記3軸磁気センサ信号に基づく3軸磁気データと、前記3軸加速度センサにより検出された前記3軸加速度センサ信号に基づく3軸加速度データとに基づいて回転軸情報を演算する回転軸情報演算部と、前記回転軸情報と、前記3軸磁気データ及び/又は前記3軸加速度データとに基づいて回転量情報を演算する回転量情報演算部と、前記回転軸情報と、前記回転量情報とに基づいて角速度ベクトル情報を演算する角速度ベクトル情報演算部とを備え、前記回転軸情報演算部は、前記3軸磁気データの分布から求まる第1の平面と前記3軸加速度データの分布から求まる第2の平面とが互いに平行となることを条件として算出される平面の法線を前記回転軸情報として演算することを特徴とする。
【0023】
また、請求項6に記載の発明は、請求項5に記載の発明において、前記第1の平面と第2の平面とが互いに平行となることの条件が、前記磁気データを構成する各信号の前記第1の平面からの距離の2乗と、前記加速度データを構成する各信号の前記第2の平面からの距離の2乗の和が最小となる平面であることを特徴とする。
【0024】
また、請求項7に記載の発明は、請求項5又は6に記載の発明において、前記3軸磁気センサ信号、前記3軸加速度センサ信号、前記第1補正磁気信号、前記第1補正加速度信号、前記第2補正磁気信号、前記第2補正加速度信号、前記回転軸情報、前記回転量情報及び前記角速度ベクトル情報のうち少なくとも1つに基づいて、角速度ベクトル情報の信頼性を評価して信頼性指標を演算する信頼性指標演算部を備えていることを特徴とする。
【0025】
また、請求項8に記載の発明は、請求項7に記載の発明において、前記角速度ベクトル情報と前記信頼性指標とが入力されて制御角速度ベクトル情報を出力する角速度ベクトル情報出力制御部を備えていることを特徴とする。
【0026】
また、請求項9に記載の発明は、前記3軸磁気センサから取得された3軸磁気センサ信号と、前記3軸加速度センサから取得された3軸加速度センサ信号とをコンピュータを用いて請求項1乃至4のいずれかに記載の各演算ステップを実行させるためのプログラムである。
【0027】
また、請求項10に記載の発明は、請求項9に記載の各演算ステップを実行させるためのプログラムを記録したコンピュータ読み取り可能な記録媒体である。
【発明の効果】
【0028】
本発明によれば、携帯機器の分野において既に広く搭載されている磁気センサや加速度センサを用いる事で、新たに角速度を計測するためのジャイロセンサを搭載する必要が無いため、新規にジャイロセンサを搭載する場合と比較してコストや実装の面積を必要とする事無く角速度を計測する事が可能となる。
【0029】
また、角速度計測装置が如何なる姿勢であっても角速度の計測が可能で、かつ連続データで検出可能な角速度検出方法及びその装置が実現できる。
【0030】
また、磁気センサからのデータと加速度センサのからのデータの両方から一つの回転軸を求めるため、磁気センサからのデータまたは加速度センサからのデータのみを用いて回転軸を求める方法に比べ、より正確かつ安定した回転軸を得ることが可能となる。
【図面の簡単な説明】
【0031】
【図1】従来の磁気式ジャイロを説明するための構成図である。
【図2】(a),(b)は、本発明に係る角速度推定についての説明図で、磁気(加速度)データのみで演算可能な場合を示している。
【図3】(a),(b)は、本発明に係る角速度推定についての説明図で、磁気(加速度)データのみでは演算できない場合を示している。
【図4】(a),(b)は、本発明に係る角速度推定についての説明図で、磁気データと加速度データを用いた場合を示している。
【図5】本発明に係る角速度検出装置の実施例1を説明するための構成図である。
【図6】実施例1における回転軸を求めるための第1の平面を示す図である。
【図7】実施例1における回転軸を求めるための第2の平面を示す図である。
【図8】実施例1における回転軸を求めるための法線方向を示す図である。
【図9】本発明に係る角速度検出装置の実施例2を説明するための構成図である。
【図10】本発明に係る角速度検出装置の実施例3を説明するための構成図である。
【図11】本発明に係る角速度検出方法を説明するためのフローチャートを示す図である。
【発明を実施するための形態】
【0032】
まず、図2(a),(b)乃至図4(a),(b)に基づいて、本発明に係る角速度推定について以下に説明する。
【0033】
図2(a),(b)は、本発明に係る角速度推定についての説明図で、磁気(加速度)データのみで演算可能な場合を示している。図2(a)は、携帯端末が磁場ベクトルに対して平行で、角速度ベクトルが垂直である場合において測定される磁気データの分布を示している。一方、図2(b)は、携帯端末が磁場ベクトルに対して傾斜して、角速度ベクトルが傾斜している場合において測定される磁気データの分布を示している。このような状況下においては、角速度と磁場(加速度)のベクトルが平行でなく、磁場の強さが十分であり、磁場分布が均一であるので、角速度推定が可能である。
【0034】
図3(a),(b)は、本発明に係る角速度推定についての説明図で、磁気(加速度)データのみでは演算できない場合を示している。図3(a)は、携帯端末が磁場ベクトルに対して傾斜しており、角速度ベクトルが傾斜している場合において測定される磁気データの分布を示している。一方、図3(b)は、携帯端末が磁場ベクトルに対して垂直で、角速度ベクトルが平行である場合において測定される磁気データの分布を示している。このような状況下においては、角速度を正確に推定することはできない。また、角速度推定の精度が低下するという問題がある。
【0035】
図4(a),(b)は、本発明に係る角速度推定についての説明図で、磁気データと加速度データを用いた場合を示している。図4(a)は、携帯端末が磁場ベクトル及び加速度ベクトルに対して傾斜しており、角速度ベクトルが傾斜している場合において測定される磁気データと加速度データの分布を示している。一方、図4(b)は、携帯端末が磁場ベクトルに対して垂直で、加速度ベクトルに対して平行であり、角速度ベクトルが磁場ベクイトルと一致している場合において測定される磁気データ及び加速度データの分布を示している。このような状況下においては、どちらのベクトルと回転軸とが一致してしまっていても、一方のベクトルと一致していなければ回転軸が得られる。したがって、本発明は、上述した図4(a),(b)の場合における角速度検出を可能としたものである。
【0036】
以下、図面を参照して本発明の各実施例について説明する。
【実施例1】
【0037】
図5は、本発明に係る角速度検出装置の実施例1を説明するための構成図で、図中符号101aは3軸磁気センサ、101bは3軸加速度センサ、102は第1補正部、103は第2補正部、104は回転軸情報演算部、105は回転量情報演算部、106は角速度ベクトル情報演算部、110は演算処理部(CPU)を示している。
【0038】
本発明に係る実施例1の角速度検出装置は、3軸磁気センサ101aと3軸加速度センサ101bと、これらのセンサからのデータを演算処理する演算処理部110とから構成されている。この演算処理部110は、第1補正部102と第2補正部103と回転軸情報演算部104と回転量情報演算部105と角速度ベクトル情報演算部106とで構成され、具体的にはコンピュータ処理されるCPUである。
【0039】
3軸磁気センサ101aは3軸磁気センサ信号(磁気センサ信号)α1を出力するもので、3軸加速度センサ101bは3軸加速度センサ信号(加速度センサ信号)β1を出力するものである。また、第1補正部102は、磁気センサ信号α1及び加速度センサ信号β1が入力され、第1補正磁気信号α2及び第1補正加速度信号β2を出力するものである。また、第2補正部103は、第1補正磁気信号α2及び第1補正加速度信号β2が入力され、第2補正磁気信号α3及び第2補正加速度信号β3を出力するものである。また、回転軸情報演算部104は、第2補正磁気信号α3及び第2補正加速度信号β3が入力され、回転軸情報cを出力するものである。また、回転量情報演算部105は、回転軸情報cと、第1補正磁気信号α2とが入力され、回転量情報dを出力するものである。また、角速度ベクトル情報演算部106は、回転軸情報cと回転量情報dとが入力され、角速度ベクトル情報eを出力するものである。
【0040】
本発明において回転軸情報cとは、任意の3次元空間において角速度検出装置が回転運動したときの回転軸を直接示す信号またはデータや、回転軸と一定の対応関係を示す信号またはデータを意味する。また本発明において回転量情報dとは、3次元空間において角速度検出装置が回転運動したときの単位時間当たりの回転量を直接示す信号またはデータや、回転量と一定の対応関係を示す信号またはデータを意味する。また本発明において角速度ベクトル情報eとは、3次元空間において角速度検出装置が回転運動したときの角速度ベクトルを直接示す信号またはデータや、角速度ベクトルと一定の対応関係を示す信号またはデータを意味する。
【0041】
本発明において、信号とは、ある情報を伝達するための符号であれば特に制限されず、アナログ信号であっても良いし、ディジタル信号であっても良い。
【0042】
以下、磁気センサ信号α1と第1補正磁気信号α2と第2補正磁気信号α3のいずれかに基づく3軸の時系列データを3軸磁気データh、加速度センサ信号β1と第1補正加速度信号β2と第2補正加速度信号β3のいずれかに基づく3軸の時系列データを3軸加速度データaと表す。
【0043】
また、本実施例における演算処理部110の各部、すなわち、第1補正部102と第2補正部103と回転軸情報演算部104と回転量情報演算部105と角速度ベクトル情報演算部106は、各々必要に応じて時系列データの過去の値を記憶する記憶手段を有しているものとする。
【0044】
以下に、各構成要素についてさらに具体的に説明する。
【0045】
<3軸磁気センサ>
3軸磁気センサ101aは、任意の3次元空間を構成する3つの軸各々の方向の磁気に応じた磁気センサ信号α1を出力することが可能なセンサであれば特に制限されず、例えば、ホール素子や磁気抵抗効果素子や磁気インピーダンス素子を用いたものなど既存の磁気センサが挙げられるがこれに制限されない。また、測定される磁気としては、地磁気であってもよいし、人為的に発生させた磁場による磁気であってもよい。
【0046】
また、3軸磁気センサにおける任意の3次元空間を構成する3軸としては、3軸が全て同一平面に存在する軸の組み合わせでなければ特に制限されない。3軸が構成する座標系は、直交座標系であってもよいし、斜交座標系であってもよい。
【0047】
なお、斜交座標系の場合、後述の角速度ベクトル情報が出力される以前に直交座標系に座標変換を行えばよい。
【0048】
<3軸加速度センサ>
3軸加速度センサ101bは、任意の3次元空間を構成する3つの軸各々の方向の加速度に応じた加速度センサ信号β1を出力することが可能なセンサであれば特に制限されず、例えば、コイルバネや板バネを用いた機械式加速度センサや、光学式加速度センサや、静電容量型、ピエゾ抵抗型、ガス温度分布型等の半導体式加速度センサなど、既存の加速度センサが挙げられるがこれらに制限されない。
【0049】
また、3軸加速度センサにおける任意の3次元空間を構成する3軸としては、3軸が全て同一平面に存在する軸の組み合わせでなければ特に制限されない。3軸が構成する座標系は、直交座標系であってもよいし、斜交座標系であってもよい。なお、斜交座標系の場合、後述する角速度ベクトル情報が出力される以前に直交座標系に座標変換を行えばよい。
【0050】
また、3軸加速度センサにおける任意の3次元空間を構成する3つの軸は、3軸磁気センサにおける任意の3次元空間を構成する3つの軸と同じ軸であっても良いし、異なる軸であっても良い。異なる軸である場合は、後述する回転軸演算部にて回転軸を演算する以前に同軸になるように座標変換を行えばよい。
【0051】
<第1補正部>
第1補正部102は、磁気センサ信号α1及び/又は加速度センサ信号β1を、例えば、感度やオフセットの観点から補正し、第1補正磁気信号α2及び/又は第1補正加速度信号β2を出力する。第1補正部102によって、磁気センサの感度ばらつきを低減させたり、オフセット量を加減算して正味の磁気及び加速度を示す信号に近づけることにより、高精度に回転軸、回転量及び角速度ベクトル情報を演算することが可能になる。
【0052】
例えば、3軸磁気センサ101aや3軸加速度センサ101b自体が信号を補正する機能を有する場合(例えば、補正ICを内蔵している場合)は、第1補正部102を設ける必要は無い。この様に、3軸磁気センサ101a及び3軸加速度センサ101b自体が信号を補正する機能を有している場合は、磁気センサ信号α1及び加速度センサ信号β1を以下の説明における第1補正磁気信号α2,第1補正加速度信号β2として扱う。
【0053】
<第2補正部>
第2補正部103は、第1補正磁気信号α2や第1補正加速度信号β2のそれぞれからなる一定量の群の分布のバラツキを低減する補正をして出力する機能を有するものである。分布のバラツキを低減する手段としては、例えば、単純移動平均、加重移動平均、指数移動平均などの線形フィルタによる平均化処理や中間値フィルタ、最頻値フィルタなどの非線形フィルタによる選択処理が挙げられるがこれらに限定はされない。
【0054】
例えば、本発明に係る角速度検出装置の回転に伴う第1補正磁気信号α2や第1補正加速度信号β2の変化と比較して第1補正磁気信号α2や第1補正加速度信号β2に含まれるノイズが十分に小さい場合、第2補正部103を設ける必要は無い。この様に、第1補正磁気信号α2や第1補正加速度信号β2に含まれるノイズが十分に小さい場合は、磁気信号α2及び加速度信号β2を以下の説明における第2補正磁気信号α3,第2補正加速度信号β3として扱う。
【0055】
<回転軸情報演算部>
回転軸情報演算部104は、前記3軸磁気データh及び3軸加速度データaに基づいて回転軸情報cを演算する。
【0056】
本発明の実施例1における回転軸情報演算部104は、3軸磁気データh及び3軸加速度データaとして第2補正磁気信号α3と第2補正加速度信号β3に基づく時系列データを用いているが、第2補正部103が存在しない場合は、3軸磁気データh及び3軸加速度データaとして第1補正磁気信号α2と第1補正加速度信号β2に基づく時系列データを用いて回転軸情報cを演算することも可能である。また、3軸磁気センサ101aや3軸加速度センサ101b自体が信号を補正する機能を有している場合は、3軸磁気データh及び3軸加速度データaとして磁気センサ信号α1と加速度センサ信号β1に基づく時系列データを用いて回転軸情報cを演算することも可能である。
【0057】
回転軸を求めるための具体的な方法の一例としては、以下の方法が挙げられる。すなわち、3軸磁気データhの分布から求まる第1の平面(図6のA)と、3軸加速度データaの分布から求まる第2の平面(図7のB)とが平行になることを条件として算出される平面(図8のC)の法線方向(図8のD)を回転軸として演算する方法である。このとき、第1の平面Aと第2の平面Bとが平行となることの条件としては、例えば、3軸磁気データhの第1の平面Aからのずれ量の2乗と、3軸加速度データaの第2の平面Bからのずれ量の2乗の和が最小となる平面を求める方法が適用可能である。
【0058】
<回転量情報演算部>
回転量情報演算部105は、回転軸情報演算部104により演算された回転軸情報cと、3軸磁気データh及び/又は3軸加速度データaとに基づいて回転量情報dを演算する。
【0059】
本発明の実施例1における回転量情報演算部105は、角速度ベクトル情報の精度と応答性の観点から3軸磁気データhとして第1補正磁気信号α2に基づく時系列データを用いているが、3軸磁気データhとして磁気センサ信号α1または第2補正磁気信号α3に基づく3軸の時系列データを用いる事も可能である。また、3軸加速度データaとしては加速度センサ信号β1と第1補正加速度信号β2と第2補正加速度信号β3のいずれかに基づく3軸の時系列データを用いることが可能である。
【0060】
<角速度ベクトル情報演算部>
角速度ベクトル情報演算部106は、回転軸情報演算部104により演算された回転軸情報cと、回転量情報演算部105により演算された回転量情報dとに基づいて角速度ベクトル情報eを演算する。
【0061】
つまり、角速度ベクトル情報演算部106には、回転軸情報cと回転量情報dとが入力され、それらに基づいて角速度ベクトル情報eを演算している。角速度ベクトル情報eは、回転軸情報cと回転量情報dの積を回転に要した時間で割る事で得られる。また、角速度ベクトル情報eを演算する際に、回転量情報dの過去の値を時系列データとして保持しておきその平均を回転量情報dの代わりに用いて角速度ベクトル情報eを演算して用いても良い。
【実施例2】
【0062】
図9は、本発明に係る角速度検出装置の実施例2を説明するための構成図で、図中符号107は信頼性指標演算部を示している。なお、図5に示した構成要素と同じ機能を有する構成要素には同一も符号を付してある。
【0063】
本発明の実施例2における角速度検出装置は、上述した実施例1の角速度検出装置に加えて、信頼性指標演算部107を更に備えている。なお、信頼性指標演算部107は、上述した演算処理部110に組み込まれている。
【0064】
信頼性指標演算部107により演算される信頼性指標fは、角速度ベクトル情報eの信頼性の指標として用いることができ、例えば、角速度検出装置外の装置やプログラムにより、出力された角速度ベクトル情報eを実際に使用するかどうかの判断や、角速度ベクトル情報eの補正に用いることができる。
【0065】
以下、3軸磁気データh及び3軸加速度データaを実施例1と同様に定義する。
【0066】
また、本実施例における演算処理部110の各部、すなわち第1補正部102と第2補正部103と回転軸情報演算部104と回転量情報演算部105と角速度ベクトル情報演算部106と信頼性指標演算部107は、各々必要に応じて時系列データの過去の値を記憶する記憶手段を有しているものとする。
【0067】
<信頼性指標演算部>
信頼性指標演算部107には、上述した実施例1の角速度ベクトル情報演算部106を構成する要素の出力信号である磁気センサ信号α1、加速度センサ信号β1、第1補正磁気信号α2、第1補正加速度信号β2、第2補正磁気信号α3、第2補正加速度信号β3、回転軸情報c、回転量情報d、角速度ベクトル情報eから信頼性を評価するうえで有効な信号が適宜入力されて信頼性指標fを演算する。
【0068】
信頼性を評価する方法としては、例えば、磁気ベクトルの絶対値の変動を信頼性の指標とする方法が挙げられる。磁気ベクトルの絶対値の変動が大きい場合、周囲の磁場強度が均一でないことを示しており、この場合の信頼性は低いと判断できる。反対に磁気ベクトルの絶対値の変動が小さい場合、周囲の磁場強度は均一であることを示しており、この場合の信頼性は高いと判断できる。
【0069】
また、磁気ベクトルと回転軸ベクトルのなす角及び加速度ベクトルと回転軸ベクトルのなす角を信頼性の指標とする方法が挙げられる。磁気ベクトルと回転軸ベクトルのなす角及び加速度ベクトルと回転軸ベクトルのなす角がいずれも0°又は180°に近い場合、磁気データと加速度データの分布範囲が狭い事を示しており、この場合の信頼性は低いと判断できる。反対に磁気ベクトルと回転軸ベクトルのなす角及び加速度ベクトルと回転軸ベクトルのなす角のいずれかが90°に近い場合、磁気データまたは加速度データの分布範囲が広い事を示しており、この場合の信頼性は高いと判断できる。
【0070】
その他、加速度ベクトルの絶対値から重力加速度に相当する1Gを差し引いた値を信頼性の指標とする方法や磁気ベクトルと加速度ベクトルのなす角を信頼性の指標とする方法、上述した信頼性の指標を複数組み合わせたものを最終的な信頼性の指標とする方法などが挙げられる。
【実施例3】
【0071】
図10は、本発明に係る角速度検出装置の実施例3を説明するための構成図で、図中符号108は角速度ベクトル情報出力制御部を示している。なお、図9に示した構成要素と同じ機能を有する構成要素には同一も符号を付してある。
【0072】
本発明の実施例3における角速度検出装置は、上述した実施例2の角速度検出装置に加えて、角速度ベクトル情報出力制御部108を更に備えている。なお、角速度ベクトル情報出力制御部108は、上述した演算処理装置110に組み込まれている。
【0073】
以下、3軸磁気データh及び3軸加速度データaを実施例1と同様に定義する。
【0074】
また、本実施例における演算処理部110の各部、すなわち第1補正部102と第2補正部103と回転軸情報演算部104と回転量情報演算部105と角速度ベクトル情報演算部106と信頼性指標演算部107と角速度ベクトル情報出力制御部108は、各々必要に応じて時系列データの過去の値を記憶する記憶手段を有しているものとする。
【0075】
<角速度ベクトル情報出力制御部>
角速度ベクトル情報出力制御部108は、角速度ベクトル情報eと信頼性指標fが入力され、制御角速度ベクトル情報gを出力している。角速度ベクトル情報出力制御部108では、信頼性指標fに基づいて制御角速度ベクトル情報gを出力するか否かを制御したり、制御角速度ベクトル情報gを補正制御したりすることが可能である。
【0076】
制御角速度ベクトル情報gを生成する方法としては、例えば、信頼性指標fにより角速度ベクトル情報eの信頼性が低いと判断された際に、信頼性が高い過去の値を制御角速度ベクトル情報gとして採用する方法や、信頼性指標fにより角速度ベクトル情報eの信頼性が低いと判断された際は、予め指定したエラー値を制御角速度ベクトル情報gとして採用するといった方法が挙げられる。
【0077】
このようにして、角速度計測装置(携帯端末)が如何なる姿勢であっても角速度の計測が可能で、かつ連続データで検出可能な角速度検出装置が実現できる。
【0078】
次に、本発明に係る角速度検出方法について以下に説明する。
【0079】
図11は、本発明に係る角速度検出方法を説明するためのフローチャートを示す図である。まず、3軸磁気センサ信号α1を取得する(磁気センサ信号取得ステップ;S1)とともに、3軸加速度センサ信号β1を取得する(加速度センサ信号取得ステップ;S2)。
【0080】
次に、磁気信号取得ステップS1で取得された3軸磁気センサ信号α1及び/又は加速度信号取得ステップS2で取得された3軸加速度センサ信号β1を、感度やオフセットを補正して第1補正磁気信号α2及び/又は第1補正加速度信号β2を出力する(第1補正ステップ;S3)と、第1補正磁気信号α2や第1補正加速度信号β2のそれぞれからなる一定量の群の分布のバラツキを補正して第2補正磁気信号α3と第2補正加速度信号β3を出力する(第2補正ステップ;S4)とを選択的に使用する。
【0081】
次に、磁気センサ信号α1と第1補正磁気信号α2と第2補正磁気信号α3のいずれかに基づく3軸の時系列データを3軸磁気データhと、加速度センサ信号β1と第1補正加速度信号β2と第2補正加速度信号β3のいずれかに基づく3軸の時系列データを3軸加速度データaとに基づいて回転軸情報cを演算する(回転軸情報演算ステップ;S5)。次に、回転軸情報演算ステップで演算された回転軸情報cと、3軸磁気データh及び/又は3軸加速度データaとに基づいて回転量情報dを演算する(回転量情報演算ステップ;S6)。
【0082】
次に、回転軸情報演算ステップにより演算された回転軸情報cと、回転量情報演算ステップにより演算された回転量情報dとに基づいて角速度ベクトル情報eを演算する(角速度ベクトル情報演算ステップ;S7)。
【0083】
上述した回転軸情報演算ステップは、3軸磁気データhの分布から求まる第1の平面と、3軸加速度データaの分布から求まる第2の平面とが互いに平行になることを条件として算出される平面の法線を回転軸情報cとして演算する。
【0084】
また、前記算出される平面が、3軸磁気データhを構成する各3軸磁気信号の前記第1の平面からのずれ量の2乗と、3軸加速度データaを構成する各3軸加速度信号の前記第2の平面からのずれ量の2乗の和が最小となる平面である。
【0085】
次に、角速度ベクトル情報演算ステップを構成する要素の出力信号である3軸磁気センサ信号α1と3軸加速度センサ信号β1と第1補正磁気信号α2と第1補正加速度信号β2と第2補正磁気信号α3と第2補正加速度信号β3と回転軸情報cと回転量情報dと角速度ベクトル情報eのいずれかから信頼性を評価して信頼性指標fを演算する(信頼性指標演算ステップ;S8)。次に、角速度ベクトル情報eと信頼性指標fとが入力されて制御角速度ベクトル情報gを出力する(角速度ベクトル情報出力制御ステップ;S9)。
【0086】
このようにして、角速度計測装置(携帯端末)が如何なる姿勢であっても角速度の計測が可能で、かつ連続データで検出可能な角速度検出方法が実現できる。
【0087】
次に、上述した実施例1に示した角速度検出装置を用いて本発明の角速度ベクトル情報演算方法について具体的に説明する。
【0088】
<角速度ベクトル情報の演算方法>
3次元空間内に分布する、各々n(nは3以上)個の点からなる2つの点の集合χおよび集合ρを、互いに平行な第1の平面と第2の平面によって最小二乗当てはめし、前記第1の平面及び前記第2の平面の法線ベクトルを求めるための演算方法を説明する。
【0089】
3次元空間内の平面は、一般に下記式(2)で表される。
【0090】
【数1】
【0091】
ここで、wは平面の法線ベクトルである。法線ベクトルwは長さが1の単位ベクトルであると仮定しても一般性を失わないので、以下の説明では下記式(3)の条件の下で説明をする。
【0092】
|w|=1 ・・・(3)
前記第1の平面を前記式(2)で表される法線w及びδχを用いて表し、前記第2の平面を前記式(2)で表される法線w及びδρを用いて表すと下記式(4)となる。
【0093】
【数2】
【0094】
以下、i=1〜nとして集合χの元をχi(χix、χiy、χiz)、集合ρの元をρi(ρix、ρiy、ρiz)と表すことにし、前記式(4)で表される前記第1の平面からのχiのずれをSχi、前記式(4)で表される前記第2の平面からのρiのずれをSρiと表す事にすると、Sχi及びSρiは下記式(5)となる。
【0095】
【数3】
【0096】
従って、集合χの各元と第1の平面のずれと集合ρの各元と第2の平面のずれの総和が最小二乗となる平面の条件を求めるには、下記式(6)が最小値を取る条件を求めれば良い事になる。
【0097】
【数4】
【0098】
ここで、ラグランジュの未定乗数λを導入して前記式(3)の条件を取り込むと、下記式(7)及び(8)が最小二乗平面の条件である。
【0099】
【数5】
【0100】
【数6】
【0101】
まずαについての偏微分を計算すると下記式(9)が得られる。
【0102】
【数7】
【0103】
同様にしてβ、γによる偏微分を計算し、ベクトル・行列形式に書き直すと、下記式(10)が得られる。
【0104】
【数8】
【0105】
また、δによる偏微分の項は、下記式(11)となる。
【0106】
【数9】
【0107】
ここで、集合χの元の平均値χ(上付き−)および集合ρの元の平均値ρ(上付き−)を下記式(12)で、集合χの各々の元の平均値からのずれχ(上付き〜)、および集合ρの各々の元の平均値からのずれρ(上付き〜)を下記式(13)で表すことにする。
【0108】
【数10】
【0109】
【数11】
【0110】
前記式(11)は、前記式(12)(13)より、下記式(14)に変形できる。
【0111】
【数12】
【0112】
ここで、前記式(8)の条件から、下記式(15)が得られる。
【0113】
【数13】
【0114】
上記式(15)を用いて前記式(10)の後ろの項を計算すると、下記式(16)となる。
【0115】
【数14】
【0116】
ここで、下記式(17)および(18)から、下記式(19)となる。
【0117】
【数15】
【0118】
【数16】
【0119】
【数17】
【0120】
上記式(19)を用いて、前記式(10)を整理すると、下記式(20)となる。
【0121】
【数18】
【0122】
従って、前記式(8)の条件は下記式(21)とまとめることが出来る。
【0123】
【数19】
【0124】
ここで、前記式(21)を簡潔に表すため、前記式(20)に含まれる行列を下記式(22)で表される記号Gを導入して書き直すと下記式(23)が得られる。
【0125】
【数20】
【0126】
【数21】
【0127】
つまり、行列Gの固有ベクトルを求めれば所望の法線ベクトルwを得ることができる。ただし、法線ベクトルwは下記式(24)を満たす必要がある。
【0128】
【数22】
【0129】
行列Gは実対称行列であるので、既知のQR法などを用いて簡単に固有値・固有ベクトルを求める事ができる。
【0130】
本実施例では回転軸情報演算部104に入力される3軸磁気データh及び3軸加速度データaが集合χおよび集合ρに相当する。また、以上の演算により得られる法線ベクトルwが回転軸情報演算部104により演算される回転軸情報cに相当する。
【0131】
<回転量の演算方法>
3次元空間内の任意の2点間の、任意の回転軸周りの回転量を求めるには、前記任意の2点を前記任意の回転軸に垂直な平面へ射影し、射影された2点と前記任意の回転軸が前記垂直な平面上でなす角を求めれば良い。
【0132】
従って、前記任意の2点をr1、r2、前記回転軸の向きを表す単位ベクトルをR0と表すと、r1をr1’、r2’は下記式(25)で与えられ、前記回転量をQで表すと下記式(26)のようになる。
【0133】
【数23】
【0134】
【数24】
【0135】
本実施例では回転量情報演算部105に入力される3軸磁気データhを構成するデータのうち、時系列において隣り合った2データが前記任意の2点r1、r2に相当し、回転軸情報演算部104により演算される回転軸情報cが前記回転軸R0に相当する。また、前記式(26)で表される回転量Qが回転量情報演算部105により演算される回転量情報dに相当する。
【0136】
回転量情報dとしては前記式(26)で表される回転量Qをそのまま用いても良いし、回転量Qに対し平均化処理などを行ったものを用いても良い事は前述の通りである。
【0137】
<角速度ベクトル情報の演算方法>
角速度ベクトルはその向きが回転軸の向きであり、その大きさが単位時間当たりの回転量であるベクトルである。
【0138】
従って、前記回転軸の向きを表す単位ベクトルをR0と表し、前記回転量をQと表し、前記回転量に要した時間をTと表し、前記角速度ベクトルをRと表すと下記式(27)のようになる。
【0139】
【数25】
【0140】
本実施例では、回転軸情報演算部104により演算された回転軸情報cが前記回転軸の向きを表す単位ベクトルをR0に相当し、回転量情報演算部105により演算された回転量情報dが前記回転量Qに相当し、回転量情報dを演算する際に用いた前記3軸磁気データhを構成するデータのうち時系列において隣り合った2データ間の時間差が前記時間をTに相当する。また、前記式(27)により演算された角速度ベクトルRが角速度ベクトル演算部106により演算される角速度ベクトル情報eに相当する。
【0141】
このようにして、角速度計測装置(携帯端末)が如何なる姿勢であっても角速度の計測が可能で、かつ連続データで検出可能な角速度検出方法が実現できる。
【0142】
<信頼性指標の演算方法>
次に、上述した実施例3に示した角速度検出装置を用いて本発明の信頼性指標演算方法ついて具体的に説明する。
【0143】
具体的には、第2補正部103により演算された第2補正磁気信号α3からなる時系列の3軸磁気データhと、第2補正加速度信号β3からなる時系列の3軸加速度データaと、回転軸情報演算部104により演算された回転軸情報cと、角速度ベクトル情報演算部105により演算された角速度ベクトル情報eを用いて信頼性指標を演算する方法である。
【0144】
回転軸の向きを表す単位ベクトルと磁気ベクトルの平行度を表す指標をq、回転軸の向きを表す単位ベクトルと加速度ベクトルの平行度を表す指標をpと表すこととし、下記式(28)で定義する。
【0145】
【数26】
【0146】
前記式(28)で定義される指標をq及びpの時刻jにおける値を各々qj、pjと表し、さらに、各々の平均値をqj(上付き−)、pj(上付き−)で表すこととする。下記式(29)で与えられる第1の信頼性指標f1を算出する。下記式(29)内の第1の信頼性指標f1に付けられた添え字jは時刻jにおける値である事を示す。
【0147】
【数27】
【0148】
続いて、回転軸の向きを表す単位ベクトルと磁気ベクトルの平行度qおよび角速度ベクトルRを用いて、下記式(30)で与えられる第2の信頼性指標f2を算出する。ただし、KおよびCは重み付けの定数であり、例えばK=720、C=1000を用いる。下記式(30)内の角速度ベクトルR及び第2の信頼性指標f2に付けられた添え字jは時刻jにおける値である事を示す。
【0149】
【数28】
【0150】
前記式(29)により演算されたf1及び前記式(30)により演算されたf2が信頼性指標演算部107により演算される信頼性指標fに相当する。
【0151】
<制御角速度ベクトル情報の生成方法>
次に、上述した実施例3に示した角速度検出装置を用いて本発明の制御角速度ベクトル情報の生成方法について具体的に説明する。
【0152】
具体的には、信頼性指標演算部107により演算される信頼性指標fと角速度ベクトル情報演算部106により演算される角速度ベクトル情報eを用いて制御角速度ベクトル情報gを生成する方法である。
【0153】
以下の説明では、信頼性指標演算部107により演算される信頼性指標fとして、例えば、前記式(29)により演算された第1の信頼性指標f1及び前記式(30)により演算された第2の信頼性指標f2を、角速度ベクトル情報演算部106により演算される角速度ベクトル情報eとして、例えば、前記式(27)により演算された角速度ベクトルRを用いた場合の演算を示す。
【0154】
前記式(29)により演算された第1の信頼性指標f1の値が第1の信頼性指標の閾値TH1(例えばTH1=0.25を用いる)以上、または、前記式(30)により演算された第2の信頼性指標f2の値が第2の信頼性指標の閾値TH2(例えばTH2=0.98を用いる)以上の場合、下記式(31)に従い制御角速度ベクトル情報gを生成する。ただし、下記式中のUは制御角速度ベクトル情報gの補正のための定数であり、例えば
U=0.9を用いる。下記式(31)内の角速度ベクトルR及び制御角速度ベクトル情報gに付けられた添え字jは時刻jにおける値である事を示し、添え字j−1は時刻jよりも1つ過去の値である事を示す。
【0155】
【数29】
【0156】
前記式(31)により演算されたgiが角速度ベクトル情報出力制御部108により演算される制御角速度ベクトル情報gに相当する。
【0157】
なお、上述した各ステップは、コンピュータを用いて実行させるためのプログラムとして構成することが可能である。また、上述した各ステップを実行させるためのプログラムを記録したコンピュータ読み取り可能な記録媒体として構成することも可能である。
【符号の説明】
【0158】
1 磁気式ジャイロ
3 メモリ
6 回転速度判別手段
7 角速度算出手段
8 出力手段
11 コンピュータ
21 3軸磁気センサ
22 3軸加速度センサ
41 第1回転軸決定手段
42 第2回転軸決定手段
51 第1回転角度算出手段
52 第2回転角度算出手段
101a 3軸磁気センサ
101b 3軸加速度センサ
102 第1補正部
103 第2補正部
104 回転軸情報演算部
105 回転量情報演算部
106 角速度ベクトル情報演算部
107 信頼性指標演算部
108 角速度ベクトル情報出力制御部
110 演算処理部(CPU)
【特許請求の範囲】
【請求項1】
3軸磁気センサが検出した3軸磁気センサ信号に基づく3軸磁気データを取得する磁気データ取得ステップと、
3軸加速度センサが検出した3軸加速度センサ信号に基づく3軸加速度データを取得する加速度データ取得ステップと、
前記3軸磁気データと、前記3軸加速度データとに基づいて回転軸情報を演算する回転軸情報演算ステップと、
前記回転軸情報と、前記3軸磁気データ及び/又は前記3軸加速度データとに基づいて回転量情報を演算する回転量情報演算ステップと、
前記回転軸情報と、前記回転量情報とに基づいて角速度ベクトル情報を演算する角速度ベクトル情報演算ステップとを有し、
前記回転軸情報演算ステップは、前記3軸磁気データの分布から求まる第1の平面と前記3軸加速度データの分布から求まる第2の平面とが互いに平行となることを条件として算出される平面の法線を前記回転軸情報として演算することを特徴とする角速度検出方法。
【請求項2】
前記算出される平面が、前記3軸磁気データの前記第1の平面からの距離の2乗と、前記3軸加速度データの前記第2の平面からの距離の2乗の和が最小となる平面であることを特徴とする請求項1に記載の角速度検出方法。
【請求項3】
前記3軸磁気データ、前記3軸加速度データ、前記回転軸情報、前記回転量情報及び前記角速度ベクトル情報のうち少なくとも1つに基づいて角速度ベクトル情報の信頼性を評価し信頼性指標を演算する信頼性指標演算ステップを有することを特徴とする請求項1又は2に記載の角速度検出方法。
【請求項4】
前記角速度ベクトル情報と前記信頼性指標とに基づいて制御角速度ベクトル情報を出力する角速度ベクトル情報出力制御ステップを有することを特徴とする請求項3に記載の角速度検出方法。
【請求項5】
3軸磁気センサ信号を出力する3軸磁気センサと、
3軸加速度センサ信号を出力する3軸加速度センサと、
前記3軸磁気センサにより検出された前記3軸磁気センサ信号に基づく3軸磁気データと、前記3軸加速度センサにより検出された前記3軸加速度センサ信号に基づく3軸加速度データとに基づいて回転軸情報を演算する回転軸情報演算部と、
前記回転軸情報と、前記3軸磁気データ及び/又は前記3軸加速度データとに基づいて回転量情報を演算する回転量情報演算部と、
前記回転軸情報と、前記回転量情報とに基づいて角速度ベクトル情報を演算する角速度ベクトル情報演算部とを備え、
前記回転軸情報演算部は、前記3軸磁気データの分布から求まる第1の平面と前記3軸加速度データの分布から求まる第2の平面とが互いに平行となることを条件として算出される平面の法線を前記回転軸情報として演算することを特徴とする角速度検出装置。
【請求項6】
前記第1の平面と第2の平面とが互いに平行となることの条件が、前記磁気データを構成する各信号の前記第1の平面からの距離の2乗と、前記加速度データを構成する各信号の前記第2の平面からの距離の2乗の和が最小となる平面であることを特徴とする請求項5に記載の角速度検出装置。
【請求項7】
前記3軸磁気センサ信号、前記3軸加速度センサ信号、前記第1補正磁気信号、前記第1補正加速度信号、前記第2補正磁気信号、前記第2補正加速度信号、前記回転軸情報、前記回転量情報及び前記角速度ベクトル情報のうち少なくとも1つに基づいて、角速度ベクトル情報の信頼性を評価して信頼性指標を演算する信頼性指標演算部を備えていることを特徴とする請求項5又は6に記載の角速度検出装置。
【請求項8】
前記角速度ベクトル情報と前記信頼性指標とが入力されて制御角速度ベクトル情報を出力する角速度ベクトル情報出力制御部を備えていることを特徴とする請求項7に記載の角速度検出装置。
【請求項9】
前記3軸磁気センサから取得された3軸磁気センサ信号と、前記3軸加速度センサから取得された3軸加速度センサ信号とをコンピュータを用いて請求項1乃至4のいずれかに記載の各演算ステップを実行させるためのプログラム。
【請求項10】
請求項9に記載の各演算ステップを実行させるためのプログラムを記録したコンピュータ読み取り可能な記録媒体。
【請求項1】
3軸磁気センサが検出した3軸磁気センサ信号に基づく3軸磁気データを取得する磁気データ取得ステップと、
3軸加速度センサが検出した3軸加速度センサ信号に基づく3軸加速度データを取得する加速度データ取得ステップと、
前記3軸磁気データと、前記3軸加速度データとに基づいて回転軸情報を演算する回転軸情報演算ステップと、
前記回転軸情報と、前記3軸磁気データ及び/又は前記3軸加速度データとに基づいて回転量情報を演算する回転量情報演算ステップと、
前記回転軸情報と、前記回転量情報とに基づいて角速度ベクトル情報を演算する角速度ベクトル情報演算ステップとを有し、
前記回転軸情報演算ステップは、前記3軸磁気データの分布から求まる第1の平面と前記3軸加速度データの分布から求まる第2の平面とが互いに平行となることを条件として算出される平面の法線を前記回転軸情報として演算することを特徴とする角速度検出方法。
【請求項2】
前記算出される平面が、前記3軸磁気データの前記第1の平面からの距離の2乗と、前記3軸加速度データの前記第2の平面からの距離の2乗の和が最小となる平面であることを特徴とする請求項1に記載の角速度検出方法。
【請求項3】
前記3軸磁気データ、前記3軸加速度データ、前記回転軸情報、前記回転量情報及び前記角速度ベクトル情報のうち少なくとも1つに基づいて角速度ベクトル情報の信頼性を評価し信頼性指標を演算する信頼性指標演算ステップを有することを特徴とする請求項1又は2に記載の角速度検出方法。
【請求項4】
前記角速度ベクトル情報と前記信頼性指標とに基づいて制御角速度ベクトル情報を出力する角速度ベクトル情報出力制御ステップを有することを特徴とする請求項3に記載の角速度検出方法。
【請求項5】
3軸磁気センサ信号を出力する3軸磁気センサと、
3軸加速度センサ信号を出力する3軸加速度センサと、
前記3軸磁気センサにより検出された前記3軸磁気センサ信号に基づく3軸磁気データと、前記3軸加速度センサにより検出された前記3軸加速度センサ信号に基づく3軸加速度データとに基づいて回転軸情報を演算する回転軸情報演算部と、
前記回転軸情報と、前記3軸磁気データ及び/又は前記3軸加速度データとに基づいて回転量情報を演算する回転量情報演算部と、
前記回転軸情報と、前記回転量情報とに基づいて角速度ベクトル情報を演算する角速度ベクトル情報演算部とを備え、
前記回転軸情報演算部は、前記3軸磁気データの分布から求まる第1の平面と前記3軸加速度データの分布から求まる第2の平面とが互いに平行となることを条件として算出される平面の法線を前記回転軸情報として演算することを特徴とする角速度検出装置。
【請求項6】
前記第1の平面と第2の平面とが互いに平行となることの条件が、前記磁気データを構成する各信号の前記第1の平面からの距離の2乗と、前記加速度データを構成する各信号の前記第2の平面からの距離の2乗の和が最小となる平面であることを特徴とする請求項5に記載の角速度検出装置。
【請求項7】
前記3軸磁気センサ信号、前記3軸加速度センサ信号、前記第1補正磁気信号、前記第1補正加速度信号、前記第2補正磁気信号、前記第2補正加速度信号、前記回転軸情報、前記回転量情報及び前記角速度ベクトル情報のうち少なくとも1つに基づいて、角速度ベクトル情報の信頼性を評価して信頼性指標を演算する信頼性指標演算部を備えていることを特徴とする請求項5又は6に記載の角速度検出装置。
【請求項8】
前記角速度ベクトル情報と前記信頼性指標とが入力されて制御角速度ベクトル情報を出力する角速度ベクトル情報出力制御部を備えていることを特徴とする請求項7に記載の角速度検出装置。
【請求項9】
前記3軸磁気センサから取得された3軸磁気センサ信号と、前記3軸加速度センサから取得された3軸加速度センサ信号とをコンピュータを用いて請求項1乃至4のいずれかに記載の各演算ステップを実行させるためのプログラム。
【請求項10】
請求項9に記載の各演算ステップを実行させるためのプログラムを記録したコンピュータ読み取り可能な記録媒体。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2012−251870(P2012−251870A)
【公開日】平成24年12月20日(2012.12.20)
【国際特許分類】
【出願番号】特願2011−124629(P2011−124629)
【出願日】平成23年6月2日(2011.6.2)
【出願人】(303046277)旭化成エレクトロニクス株式会社 (840)
【復代理人】
【識別番号】100115624
【弁理士】
【氏名又は名称】濱中 淳宏
【復代理人】
【識別番号】100130524
【弁理士】
【氏名又は名称】藤田 英治
【Fターム(参考)】
【公開日】平成24年12月20日(2012.12.20)
【国際特許分類】
【出願日】平成23年6月2日(2011.6.2)
【出願人】(303046277)旭化成エレクトロニクス株式会社 (840)
【復代理人】
【識別番号】100115624
【弁理士】
【氏名又は名称】濱中 淳宏
【復代理人】
【識別番号】100130524
【弁理士】
【氏名又は名称】藤田 英治
【Fターム(参考)】
[ Back to top ]