
角速度検出装置及び角速度のエラー検出方法
【課題】 ノイズに伴う角速度変化に対しては、エラー検出せずに、故障による角速度の異常変化をノイズと区別してエラー検出することが可能な角速度検出装置及び角速度のエラー検出方法を提供することを目的としている。
【解決手段】 本実施形態の角速度検出装置は、プラスカウンターでは、「時間」ごとに算出した平均角速度「ASMAV(deg/s)」が、例えば、3000(deg/s)以上であるときに、3を加算するとともに3000よりも小さいときに、1を減算して第1のカウンター値Pを求める。マイナスカウンターでは、前記平均角速度「ASMAV(deg/s)」が、例えば、−3000(deg/s)以下であるときに、3を加算するとともに−3000よりも大きいとき、1を減算して第2のカウンター値Mを求める。各カウンター値が所定のエラー閾値(例えば20)を越えたときにエラーと判断される。
【解決手段】 本実施形態の角速度検出装置は、プラスカウンターでは、「時間」ごとに算出した平均角速度「ASMAV(deg/s)」が、例えば、3000(deg/s)以上であるときに、3を加算するとともに3000よりも小さいときに、1を減算して第1のカウンター値Pを求める。マイナスカウンターでは、前記平均角速度「ASMAV(deg/s)」が、例えば、−3000(deg/s)以下であるときに、3を加算するとともに−3000よりも大きいとき、1を減算して第2のカウンター値Mを求める。各カウンター値が所定のエラー閾値(例えば20)を越えたときにエラーと判断される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、角速度検出装置に係り、特に角速度のエラー検出に関するものである。
【背景技術】
【0002】
下記特許文献1には、舵角センサが出力する舵角変化量を積算して演算舵角値を算出し、舵角センサが出力する舵角値と前記演算舵角値との偏差が所定値を越えたときにセンサ異常であると判定する舵角センサ異常検出装置に関する発明が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平11−59462号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来では突発的に角度が変化してしまうようなノイズもエラーとして検出されやすい。そして従来では、ノイズに伴う角速度変化に対してはエラー検出しない一方で、故障による角速度の異常変化をノイズと区別してエラー検出することが困難であった。
【0005】
そこで本発明は上記従来の問題点を解決するためのものであり、ノイズに伴う角速度変化に対しては、エラー検出せずに、故障による角速度の異常変化をノイズと区別してエラー検出することが可能な角速度検出装置及び角速度のエラー検出方法を提供することを目的としている。
【課題を解決するための手段】
【0006】
本発明の角速度検出装置は、
角速度を算出する際の単位時間よりも短い時間間隔T1ごとに検出された角度に基づいて、各時間間隔T1時点での前記角速度を求め、さらに前記時間間隔T1を過去に遡って複数回分まとめた各角速度により平均角速度を算出する算出手段と、
前記時間間隔T1の経過ごとに算出した前記平均角速度が、正値により定められた所定の閾値以上であるときに、所定の数値aを加算するとともに前記閾値よりも小さいときに、所定の数値bを減算して第1のカウンター値を求めるプラスカウンターと、
前記時間間隔T1の経過ごとに算出した前記平均角速度が負値により定められた所定の閾値以下であるときに、所定の数値cを加算するとともに前記閾値よりも大きいときに、所定の数値dを減算して第2のカウンター値を求めるマイナスカウンターと、
を有しており、
前記第1のカウンター値あるいは前記第2のカウンター値が所定のエラー閾値を越えたときにエラーと判断されることを特徴とするものである。
【0007】
また本発明における角速度のエラー検出方法は、
角速度を算出する際の単位時間よりも短い時間間隔T1ごとに検出された角度に基づいて、各時間間隔T1時点での前記角速度を求め、さらに前記時間間隔T1を過去に遡って複数回分まとめた各角速度により平均角速度を算出し、
前記時間間隔T1の経過ごとに算出した前記平均角速度が正値により定められた所定の閾値以上であるときに、所定の数値aを加算するとともに前記閾値よりも小さいときに、所定の数値bを減算して第1のカウンター値を求め、
さらに、前記時間間隔T1の経過ごとに算出した前記平均角速度が、負値により定められた所定の閾値以下であるときに所定の数値cを加算するとともに前記閾値よりも大きいときに、所定の数値dを減算して第2のカウンター値を求め、
前記第1のカウンター値あるいは前記第2のカウンター値が所定のエラー閾値を越えたときにエラーと判断することを特徴とするものである。
【0008】
このようにカウンターを設けることで、異常な平均角速度を検出しても即座にエラーとしない。そして本発明では、カウンターを一つだけでなく、平均角速度に対する閾値が正値で定められるプラスカウンターと、平均角速度に対する閾値が負値で定められるマイナスカウンターとを夫々、設けた。
【0009】
例えば時間に対する角度変化が突発的に大きく変化するようなノイズパターンでは、算出手段によって求められた平均角速度が正値と負値との双方に大きく振れてしまう。このとき本発明では、平均角速度が正値に大きく振れた場合にはプラスカウンターに、平均角速度が負値に大きく振れた場合にはマイナスカウンターに夫々、カウントされていくため、第1のカウンター値と第2のカウンター値の双方を、エラー閾値よりも小さくなるように設定しやすく、ノイズをエラー検出しないようにできる。
【0010】
本来、エラー検出したいのは、例えば、電子回路内でショートなどが生じて、時間に対する検出角度が大きく振れた状態のまま、その値を保ち続けるような故障状態である。かかる故障状態では、本発明のプラスカウンターあるいはマイナスカウンターの一方に対して、平均角速度が閾値を超えた時間が長くなり、故障に伴うカウンター値を、ノイズに伴うカウンター値よりも大きくしやすい。よって、従来に比べて、ノイズに伴うカウンター値をエラー閾値より低く、故障に伴うカウンター値をエラー閾値よりも高い状態に適切に設定できる。
【0011】
したがって本発明では、従来に比べて、ノイズに伴う角速度変化に対してはエラー検出せず、一方、故障による角速度の異常変化に対してはエラー検出可能な構成にでき、動作安定性及びエラー検出精度に優れた角速度検出装置及び角速度のエラー検出方法を実現できる。
【0012】
本発明では、各カウンター部に加算する数値a,cは、減算する数値b,dよりも大きいことが好ましい。このように加算値を大きくすることで、ノイズに伴う最大カウンター値と、故障に伴う最大カウンター値との差を広げることができ、エラー閾値を設定しやすくでき、動作安定性及びエラー検出精度に優れた構成にできる。
【0013】
また本発明では、数値bの減算は、減算する際の前記第1のカウンター値が所定の下限値よりも大きいとき、数値dの減算は、減算する際の前記第2のカウンター値が所定の下限値よりも大きいときに、夫々行われることが好ましい。減算に対する下限値を設けることで、常に、各カウンター値の下限値とエラー閾値までの差を一定にでき、エラー検出精度をより効果的に向上させることができる。
【発明の効果】
【0014】
本発明の角速度検出装置及びエラー検出方法によれば、従来に比べて、ノイズに伴う角速度変化に対してエラー検出せず、一方、故障による角速度の異常変化に対してはエラー検出可能な構成にできる。
【図面の簡単な説明】
【0015】
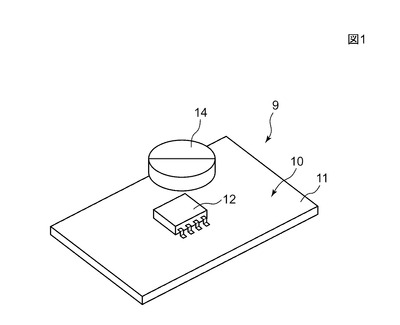
【図1】角速度検出装置の斜視図、
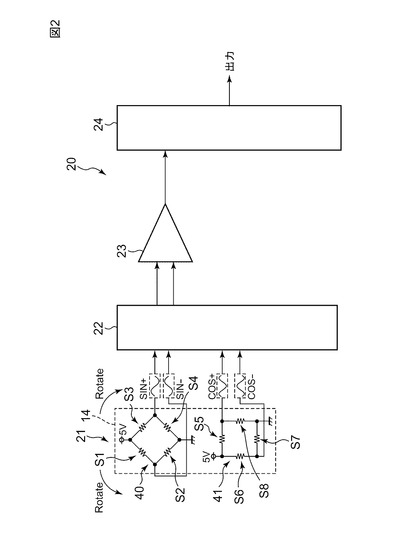
【図2】本実施形態における電子回路図、
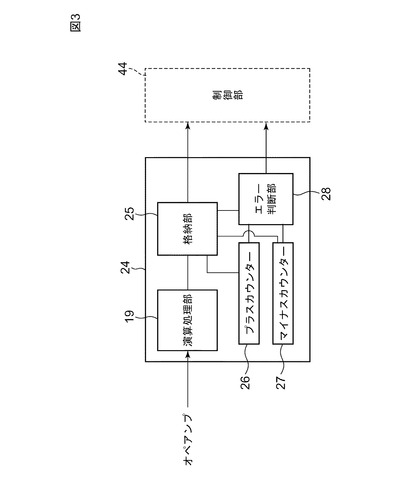
【図3】本実施形態におけるマイクロプロセッサの構成図、
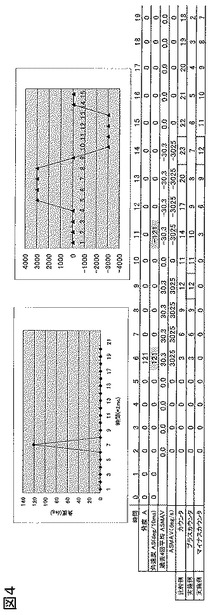
【図4】「時間」、「角度A」、「角速度AS」、平均角速度、本実施形態におけるプラスカウンター及びマイナスカウンターの各カウンター値、比較例におけるカウンターのカウンター値を示すノイズとしたいパターンのシミュレーション結果、
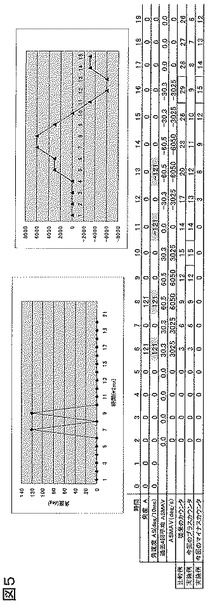
【図5】「時間」、「角度A」、「角速度AS」、平均角速度、本実施形態におけるプラスカウンター及びマイナスカウンターの各カウンター値、比較例におけるカウンターのカウンター値を示すノイズとしたいパターンのシミュレーション結果、
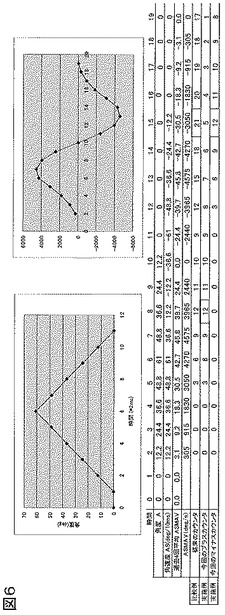
【図6】「時間」、「角度A」、「角速度AS」、平均角速度、本実施形態におけるプラスカウンター及びマイナスカウンターの各カウンター値、比較例におけるカウンターのカウンター値を示すノイズとしたいパターンのシミュレーション結果、
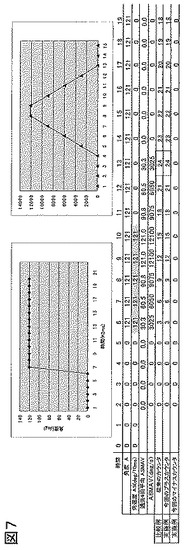
【図7】「時間」、「角度A」、「角速度AS」、平均角速度、本実施形態におけるプラスカウンター及びマイナスカウンターの各カウンター値、比較例におけるカウンターのカウンター値を示すエラーとして検出したいパターンのシミュレーション結果、
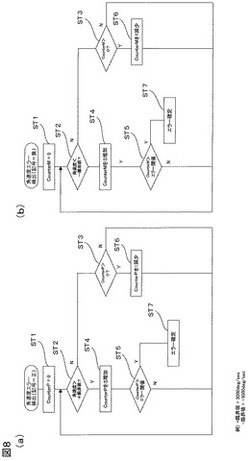
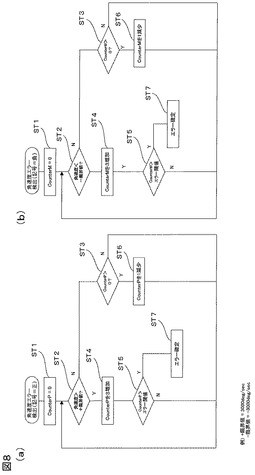
【図8】(a)は、本実施形態のプラスカウンターで算出される第1のカウンター値の増減及び第1のカウンター値に基づくエラー判断を示すフローチャート図であり、(b)は、マイナスカウンターで算出される第2のカウンター値の増減及び第2のカウンター値に基づくエラー判断を示すフローチャート図、
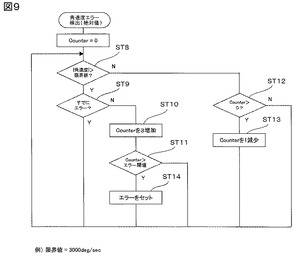
【図9】比較例のカウンターで算出されるカウンター値の増減及びカウンター値に基づくエラー判断を示すフローチャート図。
【発明を実施するための形態】
【0016】
図1は、本実施形態における角速度検出装置の斜視図である。
図1に示す角速度検出装置9は、磁気センサ10と、磁石14とを有して構成される。図1に示すように磁気センサ10はプリント配線基板11と、プリント配線基板11に電気接続されたセンサ素子12とを有して構成されている。磁気センサ10と磁石14とは間隔を空けて配置されている(非接触)。
【0017】
図2は、磁気センサ10内に組み込まれる電子回路20の回路図である。
図2に示すように電子回路20は、磁界検出部21と、マルチプレクサ22と、オペアンプ(差動増幅器)23と、マイクロプロセッサ24と、を有して構成されている。
【0018】
図2に示すように磁界検出部21は、複数の磁界検出素子(例えばGMR素子)S1,S2,S3,S4,S5,S6,S7,S8のブリッジ回路40,41により構成されている。
【0019】
図2に示すように磁石14(図2では模式的に点線で示す)が回転すると、各磁界検出素子S1〜S8の電気特性が変化し、第1のブリッジ回路40からは磁界検出信号としてSIN+信号とSIN-信号が出力され、第2のブリッジ回路41からは磁界検出信号としてCOS+信号とCOS-信号が出力される。SIN+信号とSIN-信号、及び、COS+信号とCOS-信号は夫々、位相が180度ずれている。またSIN+信号とCOS+信号、及びSIN-信号とCOS-信号は夫々、位相が90度ずれている。
【0020】
図2に示すマルチプレクサ22により、SIN+信号とSIN-信号とが選択されて、オペアンプ23に入力されると、オペアンプ23にて増幅されたSIN信号を得ることができる。
【0021】
また図2に示すマルチプレクサ22により、COS+信号とCOS-信号とが選択されて、オペアンプ23に入力されると、オペアンプ23にて増幅されたCOS信号を得ることができる。
【0022】
オペアンプ23により生成されたSIN信号及びCOS信号を用いて、マイクロプロセッサ24の図3に示す演算処理部19にて、逆正接値(arc tan)を演算し、逆正接値に基づいて磁石14の回転角度を得る。SIN信号及びCOS信号は所定の時間間隔T1ごとに演算処理部19に送られ、前記時間間隔T1ごとに磁石14の角度を得ることができる。
【0023】
図4は、ノイズとしたいパターン(エラー検出しないパターン)のシミュレーション結果を示している。図4に示す左側のグラフは「時間」と「角度」との関係を示し、右側のグラフは「時間」と「ASMAV(deg/s)」(平均角速度)との関係を示している。グラフの下側には、シミュレーション結果の表が示されている。以下、主に表に基づいて説明する。
【0024】
図4の「時間」欄に示す各時間(0、1、2、3・・)は例えば2ms間隔(上記の時間間隔T1に該当)で刻まれている。つまり「時間」欄の「1」は「0」から2ms後、「2」は「0」から4ms後・・・を示している。
【0025】
図4の「角度A」欄が、各「時間」のときの磁石14の角度である。このシミュレーションでは、「時間」が「5」までは、角度が「0」である。なお実際の使用状態では、磁石14が回転して、「角度A」が変化するのであるが、図4のシミュレーション結果では角度変化、角速度変化が異常に大きく変化していることを見やすくするために、磁石14は動いていないものとして、すなわち角度0を固定基準値として説明する。図5〜図7においても同様である。
【0026】
図4のシミュレーションでは、「時間」が「6」のとき、角度が「121」と突発的に大きくなっている(図4の角度変化を示すグラフも参照)。続いて「時間」が「7」以降になると、再び角度が「0」に戻っている。「時間」が「6」のときのように角度が突発的に変化するのは、例えば外部から大きな磁力が作用して磁石14から生じる磁界に影響を及ぼすような場合が考えられる。
【0027】
図4に示す「角速度AS」欄は、(deg/10ms)とした角速度を示している。よって、「時間」が「6」のときの角速度を求めるには、10ms前となる「時間」「1」のときから「時間」「6」の間の角度変化を求める。「時間」が「1」のときの「角度A」は「0」、その10ms後である「時間」が「6」のときの「角度A」は「121」であるから、「時間」が「6」のときの「角速度AS」(deg/10ms)を「121」と求めることが出来る。一方、「時間」が「7」になると、「角度A」が「0」に戻り、さらに「時間」「7」の10ms前は、「時間」が「2」であり、このときも「角度A」は「0」である。よって、「時間」「7」での「角速度AS」は「0」になる。
【0028】
図4に示すように、「時間」が「11」のとき、「角速度AS」が「−121」になっていることがわかる。これは、「時間」が「11」のときは、「角度A」が「0」であり、「時間」「11」から見て10ms前は、「時間」が「6」のときで「角度A」が「121」であるためである。
【0029】
このように角速度を算出する際の単位時間(10ms)よりも短い時間間隔(2ms)ごとに得られた「角度A」に基づいて、図4に示す各「時間A」時点での「角速度AS」(deg/10ms)を求める。
【0030】
次に、図4に示す「過去4回平均ASMAV」欄では、「時間」を過去に遡って4回分まとめた各角速度により平均角速度を算出している。
【0031】
例えば「時間」が「6」のとき、「時間」を過去に遡った4回分の角速度は、「121」(時間が6のとき)と「0」(時間が3〜5のとき)であるから、「121」を4で割って、「30.3」の平均角速度(deg/10ms)を得ている。
【0032】
時間が「7」のときも、「時間」を過去に遡った4回分の角速度は、「121」(時間が6のとき)と「0」(時間が4、5、7のとき)であるから、平均角速度は「30.3」となる。時間が「8」「9」も同様である。
【0033】
時間が「10」のとき、「時間」を過去に遡った4回分の角速度は、全て「0」(時間が7〜10)であるから、平均角速度は「0」となる。
【0034】
時間が「11」のとき、「時間」を過去に遡った4回分の角速度は、「−121」(時間が11のとき)と「0」(時間が8〜10のとき)であるから、「−121」を4で割ることで、平均角速度(deg/10ms)は「−30.3」となる。以下、同様にして求める。
【0035】
図4に示す「ASMAV(deg/s)」は、図4に示す「過去4回平均ASMAV」欄の平均角速度の単位時間を「10ms」から「1s」に変更したものである。図4の右側の「ASMAV(deg/s)」(平均角速度)のグラフも参照されたい。
【0036】
図3の格納部25には、図4に示す「時間」「角度A」「過去4回平均ASMAV」「ASMAV(deg/s)」の各情報が格納される。これらのうち、「角度A」と「ASMAV(deg/s)」(平均角速度)の情報が、例えば10msごとに(CAN送信タイミング)機器本体側の制御部44に送信される。
【0037】
「10msごと」とは、図4に示す「時間」「0」がスタートとすれば、「時間」が「5」「10」「15」・・・のときである。
【0038】
本実施形態では、10msよりも短い時間間隔T1(2ms)で「角度A」を求めるとともに、過去に遡って4回分まとめて平均角速度を求めている。このため、CAN送信タイミングである図4の「時間」が「5」「10」「15」のときはいずれも「角度A」及び「角速度AS」が「0」であるが、過去に遡って求めた平均角速度を送信することで、10msの間での角度変化に基づく角速度の変化を反映させることが出来る。
【0039】
図4に示すように本実施形態では、マイクロプロセッサ24内に、プラスカウンター26とマイナスカウンター27とが設けられている。そして、格納部25から各カウンター26,27に「時間」と「ASMAV(deg/s)」(平均角速度)の情報が送られる。
【0040】
以下、本実施形態における角速度のエラー検出方法を、図8のフローチャートも用いて説明する。図8(a)は、プラスカウンター26における第1のカウンター値Pの増減やエラー判断を説明するためのフローチャートであり、図8(b)は、マイナスカウンター27における第2のカウンター値Mの増減やエラー判断を説明するためのフローチャートである。
【0041】
図3に示すプラスカウンター26では、格納部25から送られてくる「ASMAV(deg/s)」(平均角速度)が正値で定められた所定の閾値以上であるときには数値3を加算し、所定の閾値を下回るとき、数値1を減算して第1のカウンター値Pを求める。ただし、減算は、第1のカウンター値Pが0(下限値)よりも大きい場合に行われる。ここでプラスカウンター26に定められた正値の閾値は例えば3000(deg/s)である。
【0042】
また図3に示すマイナスカウンター27では、格納部25から送られてくる「ASMAV(deg/s)」(平均角速度)が負値で定められた所定の閾値以下であるとき数値3を加算し、所定の閾値を上回るとき、数値1を減算して第2のカウンター値Mを求める。ただし、減算は、第2のカウンター値Mが0(下限値)よりも大きい場合に行われる。ここでマイナスカウンター27に定められた負値の閾値は例えば、−3000(deg/s)である。
【0043】
図8(a)(b)の各ステップST1に示すように、まずプラスカウンター26にて算出される第1のカウンター値Pも、マイナスカウンター27にて算出される第2のカウンター値Mも0(下限値)である。
【0044】
よって、図4に示すように「時間」が「0」から「5」までは「ASMAV(deg/s)」(平均角速度)が「0」であるから、プラスカウンター26では、図8(a)のステップST2において、いずれも平均角速度が閾値3000(deg/s)を下回る。よってステップST3に移行するが、第1のカウンター値Pは0であるから減算が行われないまま、ステップST2に戻される。よって図4に示すように、「時間」が「0」から「5」までのプラスカウンターにて算出される第1のカウンター値Pは「0」のままである。同様に、マイナスカウンター27では、図8(b)のステップST2において、いずれも平均角速度が閾値−3000(deg/s)を上回る。よってステップST3に移行するが、第2のカウンター値Mは0であるから減算が行われないまま、ステップST2に戻される。よって図4に示すように、「時間」が「0」から「5」までのマイナスカウンターで算出される第2のカウンター値Mは「0」のままである。
【0045】
図4に示すように「時間」が「6」〜「9」までは、「ASMAV(deg/s)」(平均角速度)が「3025」である。このため、プラスカウンター26では、図8(a)のステップST2において、いずれも平均角速度が閾値(3000deg/s)を上回る。よってステップST4に移行して、第1のカウンター値Pに数値3が加算される。次にステップST5に移行して、第1のカウンター値Pがエラー閾値を越えているか否か判断される。例えば本実施形態では、エラー閾値を「20」と定める。
【0046】
図4に示すように、プラスカウンター26では、「時間」が「9」まで数値3が加算されて第1のカウンター値が「12」まで大きくなるが、エラー閾値を下回るため、エラーと判断されることなく、図8(a)のステップST5からステップST2に戻される。
【0047】
また図4に示すように「時間」が「10」以降になると、「ASMAV(deg/s)」(平均角速度)がいずれも3000(deg/s)以下であるため、プラスカウンター26では、ステップST3で数値1を第1のカウンター値Pから減算する(図4及び図8(a)のステップST6参照)。減算が続ければ、いずれ第1のカウンター値Pを初期値(P=0)に戻すことができる。
【0048】
一方、マイナスカウンター27においては、「時間」が「10」までは、「ASMAV(deg/s)」(平均角速度)が閾値である「−3000deg/s」を上回り、第2のカウンター値は「0」のままである。「時間」が「11」〜「14」までの「ASMAV(deg/s)」(平均角速度)は「−3025」である。このため、マイナスカウンター27では、図8(b)のステップST2において、いずれも平均角速度が閾値(−3000deg/s)を下回る。よってステップST4に移行して、第2のカウンター値Mに数値3が加算される。次にステップST5に移行して、第2のカウンター値Mがエラー閾値を越えているか否か判断される。例えば本実施形態では、エラー閾値を「20」と定める。
【0049】
図4に示すように、マイナスカウンター27では、「時間」が「11」〜「14」まで数値3が加算されて第2のカウンター値Mが「12」まで大きくなるが、エラー閾値を下回るため、エラーと判断されることなく、図8(b)のステップST5からステップST2に戻される。
【0050】
また図4に示すように「時間」が「15」以降になると、「ASMAV(deg/s)」(平均角速度)がいずれも−3000(deg/s)を上回るため、マイナスカウンター27では、ステップST3で数値1を第2のカウンター値Mから減算する(図4及び図8(b)のステップST6参照)。
【0051】
図4に示すように、プラスカウンター26にて算出される第1のカウンター値P及びマイナスカウンター27にて算出される第2のカウンター値Mはいずれも最大値が12であり、エラー閾値の「20」を下回ることで、図4に示すシミュレーション結果は、本実施形態ではノイズとされ、エラー検出されない。
【0052】
図5は、図4と同様に、ノイズとしたいパターン(エラー検出しないパターン)のシミュレーション結果を示している。図5では、左側のグラフに示すように、「時間」が「6」と「8」の2度にわたって突発的に角度が大きくなっている。
【0053】
図5に示す「角速度AS」、「過去4回平均ASMAV」、「ASMAV(deg/s)」は、図4と同様の算出方法で計算されたものである。そして、「ASMAV(deg/s)」(平均角速度)と、図3に示すプラスカウンター26及びマイナスカウンター27の夫々にて設定された閾値を比較して、各カウンター値を増減する(図5、図8参照)。これにより図5に示すように、プラスカウンター26により算出された第1のカウンター値P及びマイナスカウンター27により算出された第2のカウンター値Mがともに最大で15となる。このとき図4と同様に、エラー閾値を「20」に設定すると、各カウンター値はエラー閾値を下回るため、図5のシミュレーション結果は、ノイズとされ、エラー検出されない。
【0054】
図6は、図4、図5と同様に、ノイズとしたいパターン(エラー検出しないパターン)のシミュレーション結果を示している。図6の左側のグラフに示すように、図4、図5に比べて「時間」に対する角度変化がやや緩やかであるが、図6のような角度変化も図4、図5と同様にノイズと判断したい。
【0055】
図6に示す「角速度AS」、「過去4回平均ASMAV」、「ASMAV(deg/s)」は、図4と同様の算出方法で計算されたものである。そして、「ASMAV(deg/s)」(平均角速度)と、図3に示すプラスカウンター26及びマイナスカウンター27にて設定された閾値を比較して、各カウンター値を増減する(図6、図8参照)。これにより図6に示すように、プラスカウンター26により算出された第1のカウンター値P及びマイナスカウンター27により算出された第2のカウンター値Mがともに最大で12となる。このとき図4、図5と同様に、エラー閾値を「20」と設定すると、各カウンター値はエラー閾値を下回るため、図6のシミュレーション結果は、ノイズとされ、エラー検出されない。
【0056】
一方、図7は、図4〜図6と違って、ノイズではなく、エラー検出したいパターンのシミュレーション結果を示している。
【0057】
図7の左側のグラフに示すように、「時間」が「5」から「6」に変化すると角度が「0」から「121」に突発的に大きくなり、「時間」が「6」以降、ずっと「121」の角度を維持し続けている。
【0058】
このような状態は、ノイズとして判断せず、図5に示す電子回路20内でのショート等の故障としてエラー検出したい。
【0059】
図7に示すように、「時間」が「0」から「5」までは「角度A」は「0」であるが、「時間」が「6」以降、「角度A」は「121」と保持し続けている。
【0060】
図7に示すように、「角速度AS」(deg/10ms)は、「時間」が「6」〜「10」までは「121」であるが、「時間」が「11」以降になると、10ms前との「角度A」に変化が無くなるため(角度変化が0)、「時間」が「11」以降になると、「角速度AS」(deg/10ms)は「0」となる。
【0061】
そして図7に示すように「過去4回平均ASMAV」、「ASMAV(deg/s)」(平均角速度)を求める。求めかたは図4で説明した通りである。各「時間」に対する「ASMAV(deg/s)」(平均角速度)が、図7の右図にグラフとして示されている。
【0062】
図4〜図6と、図7とを対比すると、「ASMAV(deg/s)」(平均角速度)は、図7のほうが、図4〜図6に比べて非常に高い数値となり、しかも、高い「ASMAV(deg/s)」(平均角速度)の状態が長い時間続く。また図7に示すように、「ASMAV(deg/s)」(平均角速度)は全て「0」以上であり、負値にならない。
【0063】
図7で得られた「ASMAV(deg/s)」(平均角速度)を、閾値(プラスカウンター26での閾値は3000、マイナスカウンターでの閾値は−3000)と比較して、本実施形態のプラスカウンター26及びマイナスカウンター27にて各カウンター値を算出すると、プラスカウンター26にて算出された第1のカウンター値Pは最大で「24」まで大きくなる。一方、マイナスカウンター27にて算出された第2のカウンター値Mは「0」のままである。
【0064】
図8(a)のフローチャートで示すように、プラスカウンター26にて算出された第1のカウンター値PがステップST5でエラー閾値である「20」を越えると、エラー信号が出力される(ステップST7)。
【0065】
なお図7のシミュレーション結果では、プラスカウンター26にて算出された第1のカウンター値Pがエラー閾値を越えたが、「角度A」が負値に大きく振れれば、マイナスカウンター27にて算出される第2のカウンター値Mが図8(b)のステップST5でエラー閾値である「20」を越え、エラー信号が出力される(図8(b)のステップST7)。
【0066】
このように図7のシミュレーション結果は、ノイズとされず、故障としてエラー検出できる。
【0067】
上記した本実施形態に対して、カウンターを一つだけ設けた形態を比較例として以下説明する。
【0068】
比較例でのフローチャートは図9である。比較例では、「ASMAV(deg/s)」(平均角速度)の絶対値が3000deg/s(閾値)を越えた場合、数値3を加算し、3000deg/sを下回った場合、数値1を減算してカウンター値を求める。すなわち一つのカウンターでは、平均角速度が3000deg/s以上になったときと、−3000deg/s以下になったときの異常な正負値、双方で数値3の加算が行われる。
【0069】
まず図4のシミュレーション結果であるが、比較例では、図4の「時間」が「6」〜「9」、「11」〜「14」で「ASMAV(deg/s)」(平均角速度)の絶対値が3000deg/s(閾値)を越えるため、図9のステップST8からステップST9に移行し、既にエラー状態で無ければステップST10で数値3がカウンター値として加算され続ける。そしてステップST11で、カウンター値がエラー閾値(上記した実施形態と同様にエラー閾値を「20」に設定する)を越えているか否か判断される。
【0070】
なお「ASMAV(deg/s)」(平均角速度)の絶対値が3000deg/s(閾値)を下回っていれば、ステップST8からステップST12に移行し、カウンター値が「0」よりも大きい状態であれば、ステップST13で数値1がカウンター値から減算される。
【0071】
図4のシミュレーション結果では、比較例のようにカウンターを一つとすると、カウンター値が最大で23まで大きくなる。この結果、図9のステップST11で、カウンター値が「20」を越えて、エラー信号が出力される(ステップST14)。
【0072】
図5、図6のシミュレーション結果でも、比較例のようにカウンターを一つとすると、カウンター値が「20」を越えるため、エラー信号が出力される。
【0073】
よって比較例では、図4〜図6のシミュレーション結果を、エラー検出してしまい、ノイズとして無視できない。
【0074】
このため比較例の場合、例えば、カウンター値に対するエラー閾値を本実施形態の「20」よりも大きくすれば、図4〜図6のシミュレーション結果もノイズと判断できる(エラー検出しない)。図5のシミュレーション結果に対する比較例でのカウンター値が最大で「29」であるから例えば比較例では、エラー閾値を「30」に変更する。そうすると比較例でも図4〜図6のシミュレーション結果を、全てノイズとして判断できエラー検出しない。
【0075】
しかしながら、図7の本来、エラー検出したいシミュレーション結果では、比較例でのカウンター値が最大で「24」であるため、エラー閾値を「30」に上げてしまうと、比較例では図7もノイズとして判断してしまいエラー検出しない。
【0076】
本実施形態では、カウンター26,27を設けることで、異常な平均角速度を検出しても即座にエラーとしない。この点は比較例も同じであるが、さらに本実施形態では、カウンターを一つだけでなく、平均角速度に対する閾値が正値に定められたプラスカウンター26と、平均角速度に対する閾値が負値に定められたマイナスカウンター27とを設けた点に特徴的部分がある。
【0077】
よって図4〜図6のように突発的に大きく角度が変化して、マイクロプロセッサ24内の演算処理部19(算出手段)によって求められた平均角速度(図4〜図7の「ASMAV(deg/s)」)が正値と負値との双方に大きく振れてしまうような状態でも、平均角速度が正値に大きく振れた場合にはプラスカウンター26に、平均角速度が負値に大きく振れた場合にはマイナスカウンター27に夫々、カウントされていくため、プラスカウンター26により求めた第1のカウンター値と、マイナスカウンター27により求めた第2のカウンター値の双方を、エラー閾値よりも小さくなるように設定しやすく、ノイズをエラー検出しないようにできる。
【0078】
本来、エラー検出したいのは、例えば、電子回路20内でショートなどが生じて、時間に対する検出角度が大きく振れた状態のまま、その値を保ち続けるような故障状態である(図7)。かかる故障状態では、本実施形態のプラスカウンター26あるいはマイナスカウンター27の一方に対して、平均角速度が閾値を超えた時間が長くなり、故障に伴うカウンター値を、ノイズに伴うカウンター値よりも大きくできる。例えば、図4〜図5では、プラスカウンター26及びマイナスカウンター27の各カウンター値の最大値は「15」であるが、図7では、プラスカウンター26の第1のカウンター値を最大で「24」にできる。
【0079】
よって、ノイズに伴うカウンター値(図4〜図6)をエラー閾値より低く、故障に伴うカウンター値(図7)をエラー閾値よりも高い状態に適切に設定できる。
【0080】
一方、比較例では、図5のノイズに伴うカウンター値が、図7の故障に伴うカウンター値を上回ってしまうため、ノイズに伴う角速度変化に対してエラー検出せず、故障に伴う異常な角速度変化に対してエラー検出可能な構成にできない。比較例では、ノイズと故障の双方をエラー検出するか、双方をエラー検出しない状態になる。
【0081】
これに対して本実施形態では、ノイズに伴う角速度変化に対してはエラー検出せず、一方、故障による角速度の異常変化に対してはエラー検出可能な構成にでき、動作安定性及びエラー検出精度に優れた角速度検出装置及び角速度のエラー検出方法を実現できる。
【0082】
また、本実施形態では、各カウンター26,27に加算する数値a、cを例えば「3」とし、減算する数値b,dを例えば「1」として、加算値を減算値よりも大きくしているが、これにより、ノイズ(図4〜図6)に伴う最大カウンター値と、故障(図7)に伴う最大カウンター値との差を広げることができ、エラー閾値を設定しやすくでき、動作安定性及びエラー検出精度に優れた構成にできる。
【0083】
また、数値bの減算は、減算する際の前記第1のカウンター値Pが所定の下限値よりも大きいとき、数値dの減算は、減算する際の前記第2のカウンター値Mが所定の下限値よりも大きいときに、夫々行われるように制御されている。
【0084】
すなわち、各カウンター値の下限値を例えば「0」に設定し、図8(a)(b)のステップST3では、カウンター値が「0」よりも大きい場合に、ステップST6で各カウンター値から1を減算している。
【0085】
下限値を設けない構成とすると、例えば、ある程度までカウンター値が下がった場合に、減算値を「1」よりも、より小さい値に変更するなどの制御を行って、カウンター値があまり小さくならないように調整してエラー検出感度の低下を抑制することが必要になる。
【0086】
しかしながら上記のように減算値を、現カウンター値を見ながら変更等するのは制御系に負担がかかるため、本実施形態のように、減算に対する下限値を設けておけば、常に、各カウンター値の下限値とエラー閾値までの差を一定にでき、制御系を複雑化することなく、エラー検出精度をより効果的に向上させることができる。
【0087】
図3のマイクロプロセッサ24に示すプラスカウンター26及びマイナスカウンター27とは別にエラー判断部28を設けて、このエラー判断部28で、図8(a)(b)に示すステップST5,ST7を行うことができる。あるいは、このようなエラー判断を、各カウンター26,27内で行うように制御することもできる。
【0088】
エラーが検知されると、制御部44にエラー信号を送信する。エラー信号を受けた制御部44は、例えば駆動を完全に停止する。またエラー信号を格納部25に送って、10ms間隔で制御部44に送信される「角度A」と「ASMAV(deg/s)」(平均角速度)の送信を停止することもできる。エラー信号をどのように使用するかは、本実施形態の角速度検出装置9を組み込む機種等により適宜変更できる。
【0089】
例えば本実施形態の角速度検出装置は舵角センサとして構成することができる。本実施形態では角速度の異常が検出されても即座にエラーにせず、また精度良く故障に伴う角速度の異常変化に対してエラー検出できるため、動作安定性及び信頼性を向上させることができる。
【符号の説明】
【0090】
9 角速度検出装置
10 磁気センサ
11 プリント配線基板
14 磁石
20 電子回路
21 磁界検出部
22 マルチプレクサ
23 オペアンプ
24 マイクロプロセッサ
25 格納部
26 プラスカウンター
27 マイナスカウンター
28 エラー判断部
44 制御部
【技術分野】
【0001】
本発明は、角速度検出装置に係り、特に角速度のエラー検出に関するものである。
【背景技術】
【0002】
下記特許文献1には、舵角センサが出力する舵角変化量を積算して演算舵角値を算出し、舵角センサが出力する舵角値と前記演算舵角値との偏差が所定値を越えたときにセンサ異常であると判定する舵角センサ異常検出装置に関する発明が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平11−59462号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来では突発的に角度が変化してしまうようなノイズもエラーとして検出されやすい。そして従来では、ノイズに伴う角速度変化に対してはエラー検出しない一方で、故障による角速度の異常変化をノイズと区別してエラー検出することが困難であった。
【0005】
そこで本発明は上記従来の問題点を解決するためのものであり、ノイズに伴う角速度変化に対しては、エラー検出せずに、故障による角速度の異常変化をノイズと区別してエラー検出することが可能な角速度検出装置及び角速度のエラー検出方法を提供することを目的としている。
【課題を解決するための手段】
【0006】
本発明の角速度検出装置は、
角速度を算出する際の単位時間よりも短い時間間隔T1ごとに検出された角度に基づいて、各時間間隔T1時点での前記角速度を求め、さらに前記時間間隔T1を過去に遡って複数回分まとめた各角速度により平均角速度を算出する算出手段と、
前記時間間隔T1の経過ごとに算出した前記平均角速度が、正値により定められた所定の閾値以上であるときに、所定の数値aを加算するとともに前記閾値よりも小さいときに、所定の数値bを減算して第1のカウンター値を求めるプラスカウンターと、
前記時間間隔T1の経過ごとに算出した前記平均角速度が負値により定められた所定の閾値以下であるときに、所定の数値cを加算するとともに前記閾値よりも大きいときに、所定の数値dを減算して第2のカウンター値を求めるマイナスカウンターと、
を有しており、
前記第1のカウンター値あるいは前記第2のカウンター値が所定のエラー閾値を越えたときにエラーと判断されることを特徴とするものである。
【0007】
また本発明における角速度のエラー検出方法は、
角速度を算出する際の単位時間よりも短い時間間隔T1ごとに検出された角度に基づいて、各時間間隔T1時点での前記角速度を求め、さらに前記時間間隔T1を過去に遡って複数回分まとめた各角速度により平均角速度を算出し、
前記時間間隔T1の経過ごとに算出した前記平均角速度が正値により定められた所定の閾値以上であるときに、所定の数値aを加算するとともに前記閾値よりも小さいときに、所定の数値bを減算して第1のカウンター値を求め、
さらに、前記時間間隔T1の経過ごとに算出した前記平均角速度が、負値により定められた所定の閾値以下であるときに所定の数値cを加算するとともに前記閾値よりも大きいときに、所定の数値dを減算して第2のカウンター値を求め、
前記第1のカウンター値あるいは前記第2のカウンター値が所定のエラー閾値を越えたときにエラーと判断することを特徴とするものである。
【0008】
このようにカウンターを設けることで、異常な平均角速度を検出しても即座にエラーとしない。そして本発明では、カウンターを一つだけでなく、平均角速度に対する閾値が正値で定められるプラスカウンターと、平均角速度に対する閾値が負値で定められるマイナスカウンターとを夫々、設けた。
【0009】
例えば時間に対する角度変化が突発的に大きく変化するようなノイズパターンでは、算出手段によって求められた平均角速度が正値と負値との双方に大きく振れてしまう。このとき本発明では、平均角速度が正値に大きく振れた場合にはプラスカウンターに、平均角速度が負値に大きく振れた場合にはマイナスカウンターに夫々、カウントされていくため、第1のカウンター値と第2のカウンター値の双方を、エラー閾値よりも小さくなるように設定しやすく、ノイズをエラー検出しないようにできる。
【0010】
本来、エラー検出したいのは、例えば、電子回路内でショートなどが生じて、時間に対する検出角度が大きく振れた状態のまま、その値を保ち続けるような故障状態である。かかる故障状態では、本発明のプラスカウンターあるいはマイナスカウンターの一方に対して、平均角速度が閾値を超えた時間が長くなり、故障に伴うカウンター値を、ノイズに伴うカウンター値よりも大きくしやすい。よって、従来に比べて、ノイズに伴うカウンター値をエラー閾値より低く、故障に伴うカウンター値をエラー閾値よりも高い状態に適切に設定できる。
【0011】
したがって本発明では、従来に比べて、ノイズに伴う角速度変化に対してはエラー検出せず、一方、故障による角速度の異常変化に対してはエラー検出可能な構成にでき、動作安定性及びエラー検出精度に優れた角速度検出装置及び角速度のエラー検出方法を実現できる。
【0012】
本発明では、各カウンター部に加算する数値a,cは、減算する数値b,dよりも大きいことが好ましい。このように加算値を大きくすることで、ノイズに伴う最大カウンター値と、故障に伴う最大カウンター値との差を広げることができ、エラー閾値を設定しやすくでき、動作安定性及びエラー検出精度に優れた構成にできる。
【0013】
また本発明では、数値bの減算は、減算する際の前記第1のカウンター値が所定の下限値よりも大きいとき、数値dの減算は、減算する際の前記第2のカウンター値が所定の下限値よりも大きいときに、夫々行われることが好ましい。減算に対する下限値を設けることで、常に、各カウンター値の下限値とエラー閾値までの差を一定にでき、エラー検出精度をより効果的に向上させることができる。
【発明の効果】
【0014】
本発明の角速度検出装置及びエラー検出方法によれば、従来に比べて、ノイズに伴う角速度変化に対してエラー検出せず、一方、故障による角速度の異常変化に対してはエラー検出可能な構成にできる。
【図面の簡単な説明】
【0015】
【図1】角速度検出装置の斜視図、
【図2】本実施形態における電子回路図、
【図3】本実施形態におけるマイクロプロセッサの構成図、
【図4】「時間」、「角度A」、「角速度AS」、平均角速度、本実施形態におけるプラスカウンター及びマイナスカウンターの各カウンター値、比較例におけるカウンターのカウンター値を示すノイズとしたいパターンのシミュレーション結果、
【図5】「時間」、「角度A」、「角速度AS」、平均角速度、本実施形態におけるプラスカウンター及びマイナスカウンターの各カウンター値、比較例におけるカウンターのカウンター値を示すノイズとしたいパターンのシミュレーション結果、
【図6】「時間」、「角度A」、「角速度AS」、平均角速度、本実施形態におけるプラスカウンター及びマイナスカウンターの各カウンター値、比較例におけるカウンターのカウンター値を示すノイズとしたいパターンのシミュレーション結果、
【図7】「時間」、「角度A」、「角速度AS」、平均角速度、本実施形態におけるプラスカウンター及びマイナスカウンターの各カウンター値、比較例におけるカウンターのカウンター値を示すエラーとして検出したいパターンのシミュレーション結果、
【図8】(a)は、本実施形態のプラスカウンターで算出される第1のカウンター値の増減及び第1のカウンター値に基づくエラー判断を示すフローチャート図であり、(b)は、マイナスカウンターで算出される第2のカウンター値の増減及び第2のカウンター値に基づくエラー判断を示すフローチャート図、
【図9】比較例のカウンターで算出されるカウンター値の増減及びカウンター値に基づくエラー判断を示すフローチャート図。
【発明を実施するための形態】
【0016】
図1は、本実施形態における角速度検出装置の斜視図である。
図1に示す角速度検出装置9は、磁気センサ10と、磁石14とを有して構成される。図1に示すように磁気センサ10はプリント配線基板11と、プリント配線基板11に電気接続されたセンサ素子12とを有して構成されている。磁気センサ10と磁石14とは間隔を空けて配置されている(非接触)。
【0017】
図2は、磁気センサ10内に組み込まれる電子回路20の回路図である。
図2に示すように電子回路20は、磁界検出部21と、マルチプレクサ22と、オペアンプ(差動増幅器)23と、マイクロプロセッサ24と、を有して構成されている。
【0018】
図2に示すように磁界検出部21は、複数の磁界検出素子(例えばGMR素子)S1,S2,S3,S4,S5,S6,S7,S8のブリッジ回路40,41により構成されている。
【0019】
図2に示すように磁石14(図2では模式的に点線で示す)が回転すると、各磁界検出素子S1〜S8の電気特性が変化し、第1のブリッジ回路40からは磁界検出信号としてSIN+信号とSIN-信号が出力され、第2のブリッジ回路41からは磁界検出信号としてCOS+信号とCOS-信号が出力される。SIN+信号とSIN-信号、及び、COS+信号とCOS-信号は夫々、位相が180度ずれている。またSIN+信号とCOS+信号、及びSIN-信号とCOS-信号は夫々、位相が90度ずれている。
【0020】
図2に示すマルチプレクサ22により、SIN+信号とSIN-信号とが選択されて、オペアンプ23に入力されると、オペアンプ23にて増幅されたSIN信号を得ることができる。
【0021】
また図2に示すマルチプレクサ22により、COS+信号とCOS-信号とが選択されて、オペアンプ23に入力されると、オペアンプ23にて増幅されたCOS信号を得ることができる。
【0022】
オペアンプ23により生成されたSIN信号及びCOS信号を用いて、マイクロプロセッサ24の図3に示す演算処理部19にて、逆正接値(arc tan)を演算し、逆正接値に基づいて磁石14の回転角度を得る。SIN信号及びCOS信号は所定の時間間隔T1ごとに演算処理部19に送られ、前記時間間隔T1ごとに磁石14の角度を得ることができる。
【0023】
図4は、ノイズとしたいパターン(エラー検出しないパターン)のシミュレーション結果を示している。図4に示す左側のグラフは「時間」と「角度」との関係を示し、右側のグラフは「時間」と「ASMAV(deg/s)」(平均角速度)との関係を示している。グラフの下側には、シミュレーション結果の表が示されている。以下、主に表に基づいて説明する。
【0024】
図4の「時間」欄に示す各時間(0、1、2、3・・)は例えば2ms間隔(上記の時間間隔T1に該当)で刻まれている。つまり「時間」欄の「1」は「0」から2ms後、「2」は「0」から4ms後・・・を示している。
【0025】
図4の「角度A」欄が、各「時間」のときの磁石14の角度である。このシミュレーションでは、「時間」が「5」までは、角度が「0」である。なお実際の使用状態では、磁石14が回転して、「角度A」が変化するのであるが、図4のシミュレーション結果では角度変化、角速度変化が異常に大きく変化していることを見やすくするために、磁石14は動いていないものとして、すなわち角度0を固定基準値として説明する。図5〜図7においても同様である。
【0026】
図4のシミュレーションでは、「時間」が「6」のとき、角度が「121」と突発的に大きくなっている(図4の角度変化を示すグラフも参照)。続いて「時間」が「7」以降になると、再び角度が「0」に戻っている。「時間」が「6」のときのように角度が突発的に変化するのは、例えば外部から大きな磁力が作用して磁石14から生じる磁界に影響を及ぼすような場合が考えられる。
【0027】
図4に示す「角速度AS」欄は、(deg/10ms)とした角速度を示している。よって、「時間」が「6」のときの角速度を求めるには、10ms前となる「時間」「1」のときから「時間」「6」の間の角度変化を求める。「時間」が「1」のときの「角度A」は「0」、その10ms後である「時間」が「6」のときの「角度A」は「121」であるから、「時間」が「6」のときの「角速度AS」(deg/10ms)を「121」と求めることが出来る。一方、「時間」が「7」になると、「角度A」が「0」に戻り、さらに「時間」「7」の10ms前は、「時間」が「2」であり、このときも「角度A」は「0」である。よって、「時間」「7」での「角速度AS」は「0」になる。
【0028】
図4に示すように、「時間」が「11」のとき、「角速度AS」が「−121」になっていることがわかる。これは、「時間」が「11」のときは、「角度A」が「0」であり、「時間」「11」から見て10ms前は、「時間」が「6」のときで「角度A」が「121」であるためである。
【0029】
このように角速度を算出する際の単位時間(10ms)よりも短い時間間隔(2ms)ごとに得られた「角度A」に基づいて、図4に示す各「時間A」時点での「角速度AS」(deg/10ms)を求める。
【0030】
次に、図4に示す「過去4回平均ASMAV」欄では、「時間」を過去に遡って4回分まとめた各角速度により平均角速度を算出している。
【0031】
例えば「時間」が「6」のとき、「時間」を過去に遡った4回分の角速度は、「121」(時間が6のとき)と「0」(時間が3〜5のとき)であるから、「121」を4で割って、「30.3」の平均角速度(deg/10ms)を得ている。
【0032】
時間が「7」のときも、「時間」を過去に遡った4回分の角速度は、「121」(時間が6のとき)と「0」(時間が4、5、7のとき)であるから、平均角速度は「30.3」となる。時間が「8」「9」も同様である。
【0033】
時間が「10」のとき、「時間」を過去に遡った4回分の角速度は、全て「0」(時間が7〜10)であるから、平均角速度は「0」となる。
【0034】
時間が「11」のとき、「時間」を過去に遡った4回分の角速度は、「−121」(時間が11のとき)と「0」(時間が8〜10のとき)であるから、「−121」を4で割ることで、平均角速度(deg/10ms)は「−30.3」となる。以下、同様にして求める。
【0035】
図4に示す「ASMAV(deg/s)」は、図4に示す「過去4回平均ASMAV」欄の平均角速度の単位時間を「10ms」から「1s」に変更したものである。図4の右側の「ASMAV(deg/s)」(平均角速度)のグラフも参照されたい。
【0036】
図3の格納部25には、図4に示す「時間」「角度A」「過去4回平均ASMAV」「ASMAV(deg/s)」の各情報が格納される。これらのうち、「角度A」と「ASMAV(deg/s)」(平均角速度)の情報が、例えば10msごとに(CAN送信タイミング)機器本体側の制御部44に送信される。
【0037】
「10msごと」とは、図4に示す「時間」「0」がスタートとすれば、「時間」が「5」「10」「15」・・・のときである。
【0038】
本実施形態では、10msよりも短い時間間隔T1(2ms)で「角度A」を求めるとともに、過去に遡って4回分まとめて平均角速度を求めている。このため、CAN送信タイミングである図4の「時間」が「5」「10」「15」のときはいずれも「角度A」及び「角速度AS」が「0」であるが、過去に遡って求めた平均角速度を送信することで、10msの間での角度変化に基づく角速度の変化を反映させることが出来る。
【0039】
図4に示すように本実施形態では、マイクロプロセッサ24内に、プラスカウンター26とマイナスカウンター27とが設けられている。そして、格納部25から各カウンター26,27に「時間」と「ASMAV(deg/s)」(平均角速度)の情報が送られる。
【0040】
以下、本実施形態における角速度のエラー検出方法を、図8のフローチャートも用いて説明する。図8(a)は、プラスカウンター26における第1のカウンター値Pの増減やエラー判断を説明するためのフローチャートであり、図8(b)は、マイナスカウンター27における第2のカウンター値Mの増減やエラー判断を説明するためのフローチャートである。
【0041】
図3に示すプラスカウンター26では、格納部25から送られてくる「ASMAV(deg/s)」(平均角速度)が正値で定められた所定の閾値以上であるときには数値3を加算し、所定の閾値を下回るとき、数値1を減算して第1のカウンター値Pを求める。ただし、減算は、第1のカウンター値Pが0(下限値)よりも大きい場合に行われる。ここでプラスカウンター26に定められた正値の閾値は例えば3000(deg/s)である。
【0042】
また図3に示すマイナスカウンター27では、格納部25から送られてくる「ASMAV(deg/s)」(平均角速度)が負値で定められた所定の閾値以下であるとき数値3を加算し、所定の閾値を上回るとき、数値1を減算して第2のカウンター値Mを求める。ただし、減算は、第2のカウンター値Mが0(下限値)よりも大きい場合に行われる。ここでマイナスカウンター27に定められた負値の閾値は例えば、−3000(deg/s)である。
【0043】
図8(a)(b)の各ステップST1に示すように、まずプラスカウンター26にて算出される第1のカウンター値Pも、マイナスカウンター27にて算出される第2のカウンター値Mも0(下限値)である。
【0044】
よって、図4に示すように「時間」が「0」から「5」までは「ASMAV(deg/s)」(平均角速度)が「0」であるから、プラスカウンター26では、図8(a)のステップST2において、いずれも平均角速度が閾値3000(deg/s)を下回る。よってステップST3に移行するが、第1のカウンター値Pは0であるから減算が行われないまま、ステップST2に戻される。よって図4に示すように、「時間」が「0」から「5」までのプラスカウンターにて算出される第1のカウンター値Pは「0」のままである。同様に、マイナスカウンター27では、図8(b)のステップST2において、いずれも平均角速度が閾値−3000(deg/s)を上回る。よってステップST3に移行するが、第2のカウンター値Mは0であるから減算が行われないまま、ステップST2に戻される。よって図4に示すように、「時間」が「0」から「5」までのマイナスカウンターで算出される第2のカウンター値Mは「0」のままである。
【0045】
図4に示すように「時間」が「6」〜「9」までは、「ASMAV(deg/s)」(平均角速度)が「3025」である。このため、プラスカウンター26では、図8(a)のステップST2において、いずれも平均角速度が閾値(3000deg/s)を上回る。よってステップST4に移行して、第1のカウンター値Pに数値3が加算される。次にステップST5に移行して、第1のカウンター値Pがエラー閾値を越えているか否か判断される。例えば本実施形態では、エラー閾値を「20」と定める。
【0046】
図4に示すように、プラスカウンター26では、「時間」が「9」まで数値3が加算されて第1のカウンター値が「12」まで大きくなるが、エラー閾値を下回るため、エラーと判断されることなく、図8(a)のステップST5からステップST2に戻される。
【0047】
また図4に示すように「時間」が「10」以降になると、「ASMAV(deg/s)」(平均角速度)がいずれも3000(deg/s)以下であるため、プラスカウンター26では、ステップST3で数値1を第1のカウンター値Pから減算する(図4及び図8(a)のステップST6参照)。減算が続ければ、いずれ第1のカウンター値Pを初期値(P=0)に戻すことができる。
【0048】
一方、マイナスカウンター27においては、「時間」が「10」までは、「ASMAV(deg/s)」(平均角速度)が閾値である「−3000deg/s」を上回り、第2のカウンター値は「0」のままである。「時間」が「11」〜「14」までの「ASMAV(deg/s)」(平均角速度)は「−3025」である。このため、マイナスカウンター27では、図8(b)のステップST2において、いずれも平均角速度が閾値(−3000deg/s)を下回る。よってステップST4に移行して、第2のカウンター値Mに数値3が加算される。次にステップST5に移行して、第2のカウンター値Mがエラー閾値を越えているか否か判断される。例えば本実施形態では、エラー閾値を「20」と定める。
【0049】
図4に示すように、マイナスカウンター27では、「時間」が「11」〜「14」まで数値3が加算されて第2のカウンター値Mが「12」まで大きくなるが、エラー閾値を下回るため、エラーと判断されることなく、図8(b)のステップST5からステップST2に戻される。
【0050】
また図4に示すように「時間」が「15」以降になると、「ASMAV(deg/s)」(平均角速度)がいずれも−3000(deg/s)を上回るため、マイナスカウンター27では、ステップST3で数値1を第2のカウンター値Mから減算する(図4及び図8(b)のステップST6参照)。
【0051】
図4に示すように、プラスカウンター26にて算出される第1のカウンター値P及びマイナスカウンター27にて算出される第2のカウンター値Mはいずれも最大値が12であり、エラー閾値の「20」を下回ることで、図4に示すシミュレーション結果は、本実施形態ではノイズとされ、エラー検出されない。
【0052】
図5は、図4と同様に、ノイズとしたいパターン(エラー検出しないパターン)のシミュレーション結果を示している。図5では、左側のグラフに示すように、「時間」が「6」と「8」の2度にわたって突発的に角度が大きくなっている。
【0053】
図5に示す「角速度AS」、「過去4回平均ASMAV」、「ASMAV(deg/s)」は、図4と同様の算出方法で計算されたものである。そして、「ASMAV(deg/s)」(平均角速度)と、図3に示すプラスカウンター26及びマイナスカウンター27の夫々にて設定された閾値を比較して、各カウンター値を増減する(図5、図8参照)。これにより図5に示すように、プラスカウンター26により算出された第1のカウンター値P及びマイナスカウンター27により算出された第2のカウンター値Mがともに最大で15となる。このとき図4と同様に、エラー閾値を「20」に設定すると、各カウンター値はエラー閾値を下回るため、図5のシミュレーション結果は、ノイズとされ、エラー検出されない。
【0054】
図6は、図4、図5と同様に、ノイズとしたいパターン(エラー検出しないパターン)のシミュレーション結果を示している。図6の左側のグラフに示すように、図4、図5に比べて「時間」に対する角度変化がやや緩やかであるが、図6のような角度変化も図4、図5と同様にノイズと判断したい。
【0055】
図6に示す「角速度AS」、「過去4回平均ASMAV」、「ASMAV(deg/s)」は、図4と同様の算出方法で計算されたものである。そして、「ASMAV(deg/s)」(平均角速度)と、図3に示すプラスカウンター26及びマイナスカウンター27にて設定された閾値を比較して、各カウンター値を増減する(図6、図8参照)。これにより図6に示すように、プラスカウンター26により算出された第1のカウンター値P及びマイナスカウンター27により算出された第2のカウンター値Mがともに最大で12となる。このとき図4、図5と同様に、エラー閾値を「20」と設定すると、各カウンター値はエラー閾値を下回るため、図6のシミュレーション結果は、ノイズとされ、エラー検出されない。
【0056】
一方、図7は、図4〜図6と違って、ノイズではなく、エラー検出したいパターンのシミュレーション結果を示している。
【0057】
図7の左側のグラフに示すように、「時間」が「5」から「6」に変化すると角度が「0」から「121」に突発的に大きくなり、「時間」が「6」以降、ずっと「121」の角度を維持し続けている。
【0058】
このような状態は、ノイズとして判断せず、図5に示す電子回路20内でのショート等の故障としてエラー検出したい。
【0059】
図7に示すように、「時間」が「0」から「5」までは「角度A」は「0」であるが、「時間」が「6」以降、「角度A」は「121」と保持し続けている。
【0060】
図7に示すように、「角速度AS」(deg/10ms)は、「時間」が「6」〜「10」までは「121」であるが、「時間」が「11」以降になると、10ms前との「角度A」に変化が無くなるため(角度変化が0)、「時間」が「11」以降になると、「角速度AS」(deg/10ms)は「0」となる。
【0061】
そして図7に示すように「過去4回平均ASMAV」、「ASMAV(deg/s)」(平均角速度)を求める。求めかたは図4で説明した通りである。各「時間」に対する「ASMAV(deg/s)」(平均角速度)が、図7の右図にグラフとして示されている。
【0062】
図4〜図6と、図7とを対比すると、「ASMAV(deg/s)」(平均角速度)は、図7のほうが、図4〜図6に比べて非常に高い数値となり、しかも、高い「ASMAV(deg/s)」(平均角速度)の状態が長い時間続く。また図7に示すように、「ASMAV(deg/s)」(平均角速度)は全て「0」以上であり、負値にならない。
【0063】
図7で得られた「ASMAV(deg/s)」(平均角速度)を、閾値(プラスカウンター26での閾値は3000、マイナスカウンターでの閾値は−3000)と比較して、本実施形態のプラスカウンター26及びマイナスカウンター27にて各カウンター値を算出すると、プラスカウンター26にて算出された第1のカウンター値Pは最大で「24」まで大きくなる。一方、マイナスカウンター27にて算出された第2のカウンター値Mは「0」のままである。
【0064】
図8(a)のフローチャートで示すように、プラスカウンター26にて算出された第1のカウンター値PがステップST5でエラー閾値である「20」を越えると、エラー信号が出力される(ステップST7)。
【0065】
なお図7のシミュレーション結果では、プラスカウンター26にて算出された第1のカウンター値Pがエラー閾値を越えたが、「角度A」が負値に大きく振れれば、マイナスカウンター27にて算出される第2のカウンター値Mが図8(b)のステップST5でエラー閾値である「20」を越え、エラー信号が出力される(図8(b)のステップST7)。
【0066】
このように図7のシミュレーション結果は、ノイズとされず、故障としてエラー検出できる。
【0067】
上記した本実施形態に対して、カウンターを一つだけ設けた形態を比較例として以下説明する。
【0068】
比較例でのフローチャートは図9である。比較例では、「ASMAV(deg/s)」(平均角速度)の絶対値が3000deg/s(閾値)を越えた場合、数値3を加算し、3000deg/sを下回った場合、数値1を減算してカウンター値を求める。すなわち一つのカウンターでは、平均角速度が3000deg/s以上になったときと、−3000deg/s以下になったときの異常な正負値、双方で数値3の加算が行われる。
【0069】
まず図4のシミュレーション結果であるが、比較例では、図4の「時間」が「6」〜「9」、「11」〜「14」で「ASMAV(deg/s)」(平均角速度)の絶対値が3000deg/s(閾値)を越えるため、図9のステップST8からステップST9に移行し、既にエラー状態で無ければステップST10で数値3がカウンター値として加算され続ける。そしてステップST11で、カウンター値がエラー閾値(上記した実施形態と同様にエラー閾値を「20」に設定する)を越えているか否か判断される。
【0070】
なお「ASMAV(deg/s)」(平均角速度)の絶対値が3000deg/s(閾値)を下回っていれば、ステップST8からステップST12に移行し、カウンター値が「0」よりも大きい状態であれば、ステップST13で数値1がカウンター値から減算される。
【0071】
図4のシミュレーション結果では、比較例のようにカウンターを一つとすると、カウンター値が最大で23まで大きくなる。この結果、図9のステップST11で、カウンター値が「20」を越えて、エラー信号が出力される(ステップST14)。
【0072】
図5、図6のシミュレーション結果でも、比較例のようにカウンターを一つとすると、カウンター値が「20」を越えるため、エラー信号が出力される。
【0073】
よって比較例では、図4〜図6のシミュレーション結果を、エラー検出してしまい、ノイズとして無視できない。
【0074】
このため比較例の場合、例えば、カウンター値に対するエラー閾値を本実施形態の「20」よりも大きくすれば、図4〜図6のシミュレーション結果もノイズと判断できる(エラー検出しない)。図5のシミュレーション結果に対する比較例でのカウンター値が最大で「29」であるから例えば比較例では、エラー閾値を「30」に変更する。そうすると比較例でも図4〜図6のシミュレーション結果を、全てノイズとして判断できエラー検出しない。
【0075】
しかしながら、図7の本来、エラー検出したいシミュレーション結果では、比較例でのカウンター値が最大で「24」であるため、エラー閾値を「30」に上げてしまうと、比較例では図7もノイズとして判断してしまいエラー検出しない。
【0076】
本実施形態では、カウンター26,27を設けることで、異常な平均角速度を検出しても即座にエラーとしない。この点は比較例も同じであるが、さらに本実施形態では、カウンターを一つだけでなく、平均角速度に対する閾値が正値に定められたプラスカウンター26と、平均角速度に対する閾値が負値に定められたマイナスカウンター27とを設けた点に特徴的部分がある。
【0077】
よって図4〜図6のように突発的に大きく角度が変化して、マイクロプロセッサ24内の演算処理部19(算出手段)によって求められた平均角速度(図4〜図7の「ASMAV(deg/s)」)が正値と負値との双方に大きく振れてしまうような状態でも、平均角速度が正値に大きく振れた場合にはプラスカウンター26に、平均角速度が負値に大きく振れた場合にはマイナスカウンター27に夫々、カウントされていくため、プラスカウンター26により求めた第1のカウンター値と、マイナスカウンター27により求めた第2のカウンター値の双方を、エラー閾値よりも小さくなるように設定しやすく、ノイズをエラー検出しないようにできる。
【0078】
本来、エラー検出したいのは、例えば、電子回路20内でショートなどが生じて、時間に対する検出角度が大きく振れた状態のまま、その値を保ち続けるような故障状態である(図7)。かかる故障状態では、本実施形態のプラスカウンター26あるいはマイナスカウンター27の一方に対して、平均角速度が閾値を超えた時間が長くなり、故障に伴うカウンター値を、ノイズに伴うカウンター値よりも大きくできる。例えば、図4〜図5では、プラスカウンター26及びマイナスカウンター27の各カウンター値の最大値は「15」であるが、図7では、プラスカウンター26の第1のカウンター値を最大で「24」にできる。
【0079】
よって、ノイズに伴うカウンター値(図4〜図6)をエラー閾値より低く、故障に伴うカウンター値(図7)をエラー閾値よりも高い状態に適切に設定できる。
【0080】
一方、比較例では、図5のノイズに伴うカウンター値が、図7の故障に伴うカウンター値を上回ってしまうため、ノイズに伴う角速度変化に対してエラー検出せず、故障に伴う異常な角速度変化に対してエラー検出可能な構成にできない。比較例では、ノイズと故障の双方をエラー検出するか、双方をエラー検出しない状態になる。
【0081】
これに対して本実施形態では、ノイズに伴う角速度変化に対してはエラー検出せず、一方、故障による角速度の異常変化に対してはエラー検出可能な構成にでき、動作安定性及びエラー検出精度に優れた角速度検出装置及び角速度のエラー検出方法を実現できる。
【0082】
また、本実施形態では、各カウンター26,27に加算する数値a、cを例えば「3」とし、減算する数値b,dを例えば「1」として、加算値を減算値よりも大きくしているが、これにより、ノイズ(図4〜図6)に伴う最大カウンター値と、故障(図7)に伴う最大カウンター値との差を広げることができ、エラー閾値を設定しやすくでき、動作安定性及びエラー検出精度に優れた構成にできる。
【0083】
また、数値bの減算は、減算する際の前記第1のカウンター値Pが所定の下限値よりも大きいとき、数値dの減算は、減算する際の前記第2のカウンター値Mが所定の下限値よりも大きいときに、夫々行われるように制御されている。
【0084】
すなわち、各カウンター値の下限値を例えば「0」に設定し、図8(a)(b)のステップST3では、カウンター値が「0」よりも大きい場合に、ステップST6で各カウンター値から1を減算している。
【0085】
下限値を設けない構成とすると、例えば、ある程度までカウンター値が下がった場合に、減算値を「1」よりも、より小さい値に変更するなどの制御を行って、カウンター値があまり小さくならないように調整してエラー検出感度の低下を抑制することが必要になる。
【0086】
しかしながら上記のように減算値を、現カウンター値を見ながら変更等するのは制御系に負担がかかるため、本実施形態のように、減算に対する下限値を設けておけば、常に、各カウンター値の下限値とエラー閾値までの差を一定にでき、制御系を複雑化することなく、エラー検出精度をより効果的に向上させることができる。
【0087】
図3のマイクロプロセッサ24に示すプラスカウンター26及びマイナスカウンター27とは別にエラー判断部28を設けて、このエラー判断部28で、図8(a)(b)に示すステップST5,ST7を行うことができる。あるいは、このようなエラー判断を、各カウンター26,27内で行うように制御することもできる。
【0088】
エラーが検知されると、制御部44にエラー信号を送信する。エラー信号を受けた制御部44は、例えば駆動を完全に停止する。またエラー信号を格納部25に送って、10ms間隔で制御部44に送信される「角度A」と「ASMAV(deg/s)」(平均角速度)の送信を停止することもできる。エラー信号をどのように使用するかは、本実施形態の角速度検出装置9を組み込む機種等により適宜変更できる。
【0089】
例えば本実施形態の角速度検出装置は舵角センサとして構成することができる。本実施形態では角速度の異常が検出されても即座にエラーにせず、また精度良く故障に伴う角速度の異常変化に対してエラー検出できるため、動作安定性及び信頼性を向上させることができる。
【符号の説明】
【0090】
9 角速度検出装置
10 磁気センサ
11 プリント配線基板
14 磁石
20 電子回路
21 磁界検出部
22 マルチプレクサ
23 オペアンプ
24 マイクロプロセッサ
25 格納部
26 プラスカウンター
27 マイナスカウンター
28 エラー判断部
44 制御部
【特許請求の範囲】
【請求項1】
角速度を算出する際の単位時間よりも短い時間間隔T1ごとに検出された角度に基づいて、各時間間隔T1時点での前記角速度を求め、さらに前記時間間隔T1を過去に遡って複数回分まとめた各角速度により平均角速度を算出する算出手段と、
前記時間間隔T1の経過ごとに算出した前記平均角速度が、正値により定められた所定の閾値以上であるときに、所定の数値aを加算するとともに前記閾値以下であるときに、所定の数値bを減算して第1のカウンター値を求めるプラスカウンターと、
前記時間間隔T1の経過ごとに算出した前記平均角速度が負値により定められた所定の閾値以下であるときに、所定の数値cを加算するとともに前記閾値以上であるときに、所定の数値dを減算して第2のカウンター値を求めるマイナスカウンターと、
を有しており、
前記第1のカウンター値あるいは前記第2のカウンター値が所定のエラー閾値を越えたときにエラーと判断されることを特徴とする角速度検出装置。
【請求項2】
各カウンターに加算する数値a,cは、減算する数値b,dよりも大きい請求項1記載の角速度検出装置。
【請求項3】
数値bの減算は、減算する際の前記第1のカウンター値が所定の下限値よりも大きいとき、数値dの減算は、減算する際の前記第2のカウンター値が所定の下限値よりも大きいときに、夫々行われる請求項1又は2に記載の角速度検出装置。
【請求項4】
角速度を算出する際の単位時間よりも短い時間間隔T1ごとに検出された角度に基づいて、各時間間隔T1時点での前記角速度を求め、さらに前記時間間隔T1を過去に遡って複数回分まとめた各角速度により平均角速度を算出し、
前記時間間隔T1の経過ごとに算出した前記平均角速度が正値により定められた所定の閾値以上であるときに、所定の数値aを加算するとともに前記閾値以下であるときに、所定の数値bを減算して第1のカウンター値を求め、
さらに、前記時間間隔T1の経過ごとに算出した前記平均角速度が、負値により定められた所定の閾値以下であるときに所定の数値cを加算するとともに前記閾値以上であるときに、所定の数値dを減算して第2のカウンター値を求め、
前記第1のカウンター値あるいは前記第2のカウンター値が所定のエラー閾値を越えたときにエラーと判断することを特徴とする角速度のエラー検出方法。
【請求項5】
各カウンターに加算する数値a,cを、減算する数値b,dよりも大きい値に設定する請求項4記載の角速度のエラー検出方法。
【請求項6】
数値bの減算を、減算する際の前記第1のカウンター値が所定の下限値よりも大きいとき、数値dの減算を、減算する際の前記第2のカウンター値が所定の下限値よりも大きいときに、夫々行う請求項4又は5に記載の角速度のエラー検出方法。
【請求項1】
角速度を算出する際の単位時間よりも短い時間間隔T1ごとに検出された角度に基づいて、各時間間隔T1時点での前記角速度を求め、さらに前記時間間隔T1を過去に遡って複数回分まとめた各角速度により平均角速度を算出する算出手段と、
前記時間間隔T1の経過ごとに算出した前記平均角速度が、正値により定められた所定の閾値以上であるときに、所定の数値aを加算するとともに前記閾値以下であるときに、所定の数値bを減算して第1のカウンター値を求めるプラスカウンターと、
前記時間間隔T1の経過ごとに算出した前記平均角速度が負値により定められた所定の閾値以下であるときに、所定の数値cを加算するとともに前記閾値以上であるときに、所定の数値dを減算して第2のカウンター値を求めるマイナスカウンターと、
を有しており、
前記第1のカウンター値あるいは前記第2のカウンター値が所定のエラー閾値を越えたときにエラーと判断されることを特徴とする角速度検出装置。
【請求項2】
各カウンターに加算する数値a,cは、減算する数値b,dよりも大きい請求項1記載の角速度検出装置。
【請求項3】
数値bの減算は、減算する際の前記第1のカウンター値が所定の下限値よりも大きいとき、数値dの減算は、減算する際の前記第2のカウンター値が所定の下限値よりも大きいときに、夫々行われる請求項1又は2に記載の角速度検出装置。
【請求項4】
角速度を算出する際の単位時間よりも短い時間間隔T1ごとに検出された角度に基づいて、各時間間隔T1時点での前記角速度を求め、さらに前記時間間隔T1を過去に遡って複数回分まとめた各角速度により平均角速度を算出し、
前記時間間隔T1の経過ごとに算出した前記平均角速度が正値により定められた所定の閾値以上であるときに、所定の数値aを加算するとともに前記閾値以下であるときに、所定の数値bを減算して第1のカウンター値を求め、
さらに、前記時間間隔T1の経過ごとに算出した前記平均角速度が、負値により定められた所定の閾値以下であるときに所定の数値cを加算するとともに前記閾値以上であるときに、所定の数値dを減算して第2のカウンター値を求め、
前記第1のカウンター値あるいは前記第2のカウンター値が所定のエラー閾値を越えたときにエラーと判断することを特徴とする角速度のエラー検出方法。
【請求項5】
各カウンターに加算する数値a,cを、減算する数値b,dよりも大きい値に設定する請求項4記載の角速度のエラー検出方法。
【請求項6】
数値bの減算を、減算する際の前記第1のカウンター値が所定の下限値よりも大きいとき、数値dの減算を、減算する際の前記第2のカウンター値が所定の下限値よりも大きいときに、夫々行う請求項4又は5に記載の角速度のエラー検出方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2012−154677(P2012−154677A)
【公開日】平成24年8月16日(2012.8.16)
【国際特許分類】
【出願番号】特願2011−11994(P2011−11994)
【出願日】平成23年1月24日(2011.1.24)
【出願人】(000010098)アルプス電気株式会社 (4,263)
【Fターム(参考)】
【公開日】平成24年8月16日(2012.8.16)
【国際特許分類】
【出願日】平成23年1月24日(2011.1.24)
【出願人】(000010098)アルプス電気株式会社 (4,263)
【Fターム(参考)】
[ Back to top ]