
角速度検出装置用回路、角度検出装置及び故障判定システム
【課題】振動子の故障検出精度を高めた角速度検出回路、角速度検出装置及び故障判定システムを提供する。
【解決手段】駆動信号に基づいて励振振動する振動子10に接続され、角速度を検出する角速度検出回路5であって、振動子10から、コリオリの力に基づく角速度成分と、励振振動に基づく自己振動成分とを含む検出信号が入力され、検出信号から自己振動成分を抽出する自己振動成分抽出手段331と、自己振動成分抽出手段331の出力信号を積分する積分手段336を含む直流変換手段332と、直流変換手段332の出力信号の温度による変動を補正する温度特性補正手段333とを含む。
【解決手段】駆動信号に基づいて励振振動する振動子10に接続され、角速度を検出する角速度検出回路5であって、振動子10から、コリオリの力に基づく角速度成分と、励振振動に基づく自己振動成分とを含む検出信号が入力され、検出信号から自己振動成分を抽出する自己振動成分抽出手段331と、自己振動成分抽出手段331の出力信号を積分する積分手段336を含む直流変換手段332と、直流変換手段332の出力信号の温度による変動を補正する温度特性補正手段333とを含む。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、角速度検出回路、角度検出装置及び故障判定システムに関する。
【背景技術】
【0002】
振動子に働くコリオリの力を利用して角速度を検出する角速度検出装置が広く使用されている。近年、このような角度検出装置において、振動子の励振振動に基づく自己振動成分を利用して自己の故障検出が可能な角速度検出装置が開発されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2000−171257号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
振動子の励振振動に基づく自己振動成分の大きさには、振動子ごとに温度特性がある。したがって、従来の角速度検出装置では、温度特性による変動と故障による変動との判別が難しく、精度のよい故障判定は難しかった。
【0005】
本発明は、以上のような事情に鑑みてなされたものであり、振動子の故障検出精度を高めた角速度検出回路、角速度検出装置及び故障判定システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
(1)本発明に係る角速度検出装置用回路は、振動子から、角速度の大きさに応じた第1成分と、励振振動に基づく第2成分と、を含む信号が入力され、前記信号から前記第2成分を抽出する自己振動成分抽出手段と、前記自己振動成分抽出手段の出力信号の温度による変動を補正する温度特性補正手段と、を含むことを特徴とする角速度検出装置用回路である。
この角速度検出装置用回路において、前記振動子は、検出用基部から延出している連結腕と、前記連結腕に配置された駆動用基部から前記連結腕の延出方向と交差する方向に延出している駆動振動片と、前記検出用基部から前記連結腕の延出方向と交差する方向に延出している検出振動片と、を含むことを特徴としてもよい。
この角速度検出装置用回路において、前記温度特性補正手段は、前記自己振動成分抽出手段の出力信号における温度特性の1次の項に基づき、前記自己振動成分抽出手段の出力信号の温度による変動を補正することを特徴としてもよい。
この角速度検出装置用回路において、前記温度特性の1次の項を記憶する記憶手段を含み、前記温度特性補正手段は、前記記憶手段に記憶された前記温度特性の1次の項に基づき、前記自己振動成分抽出手段の出力信号の温度による変動を補正することを特徴としてもよい。
この角速度検出装置用回路において、前記温度特性補正手段の出力信号を監視し判定する判定手段を含むことを特徴としてもよい。
この角速度検出装置用回路において、前記自己振動抽出手段の前段と後段の少なくとも一方に信号を増幅する増幅手段を含むことを特徴としてもよい。
この角速度検出装置用回路において、前記温度特性補正手段の前段又は後段に、信号にオフセット値を加えるオフセット加算手段を含むことを特徴としてもよい。
本発明に係る角速度検出装置は、角速度の大きさに応じた第1成分と、励振信号に基づく第2成分と、を含む信号を発生させる振動子と、前記信号が入力され、前記信号から前
記第2成分を抽出する自己振動成分抽出手段と、前記自己振動成分抽出手段の出力信号の温度による変動を補正する温度特性補正手段と、を含むことを特徴とする角速度検出装置である。
この角速度検出装置において、前記振動子は、検出用基部から延出している連結腕と、前記連結腕に配置された駆動用基部から前記連結腕の延出方向と交差する方向に延出している駆動振動片と、前記検出用基部から前記連結腕の延出方向と交差する方向に延出している検出振動片と、を含むことを特徴としてもよい。
この角速度検出装置において、前記温度特性補正手段は、前記自己振動成分抽出手段の出力信号における温度特性の1次の項に基づき、前記自己振動成分抽出手段の出力信号の温度による変動を補正することを特徴としてもよい。
この角速度検出装置において、前記温度特性の1次の項を記憶する記憶手段を含み、前記温度特性補正手段は、前記記憶手段に記憶された前記温度特性の1次の項に基づき、前記自己振動成分抽出手段の出力信号の温度による変動を補正することを特徴としてもよい。
この角速度検出装置において、前記温度特性補正手段の出力信号を監視し判定する判定手段を含むことを特徴としてもよい。
この角速度検出装置において、前記自己振動成分抽出手段の前段と後段の少なくとも一方に信号を増幅する増幅手段を含むことを特徴としてもよい。
この角速度検出装置において、前記温度特性補正手段の前段又は後段に、信号にオフセット値を加えるオフセット加算手段を含むことを特徴としてもよい。
本発明に係る故障判定システムは、上述の角速度検出装置と、前記温度特性補正手段の出力信号が入力され、前記角速度検出装置の故障の有無を判定する外部故障判定手段と、を含むことを特徴とする故障判定システムである。
(2)適用例に係る角速度検出装置用回路は、
駆動信号に基づいて励振振動する振動子に接続され、角速度を検出する角速度検出回路であって、
前記振動子から、コリオリの力に基づく角速度成分と、前記励振振動に基づく自己振動成分とを含む検出信号が入力され、前記検出信号から前記自己振動成分を抽出する自己振動成分抽出手段と、
前記自己振動成分抽出手段の出力信号を積分する積分手段を含む直流変換手段と、
前記直流変換手段の出力信号の温度による変動を補正する温度特性補正手段とを含むことを特徴とする。
また、振動子から、角速度の大きさに応じた角速度成分と、励振振動に基づく自己振動成分と、を含む信号が入力され、前記信号から前記自己振動成分を抽出する自己振動成分抽出手段と、前記自己振動成分抽出手段の出力信号を積分する積分手段を含む直流変換手段と、前記直流変換手段の出力信号の温度による変動を補正する温度特性補正手段と、を含むことを特徴としてもよい。
また、前記振動子は、検出用基部から延出している連結腕と、前記連結腕に配置された駆動用基部から前記連結腕の延出方向と交差する方向に延出している駆動振動片と、前記検出用基部から前記連結腕の延出方向と交差する方向に延出している検出振動片と、を含むことを特徴としてもよい。
【0007】
適用例によれば、温度特性補正手段を設けることにより、振動子の励振振動に基づく自己振動成分の大きさの温度特性による変動を補正することができる。このため、故障による変動を精度よく検出することができる。したがって、振動子の故障検出精度を高めた角速度検出回路を実現することができる。
【0008】
(3)この角速度検出装置用回路であって、
前記温度特性補正手段は、前記直流変換手段の出力信号における温度特性の1次の項に基づき、前記直流変換手段の出力信号の温度による変動を補正してもよい。
【0009】
(4)この角速度検出装置用回路であって、
前記温度特性の1次の項を記憶する記憶手段を含み、
前記温度特性補正手段は、前記記憶手段に記憶された前記温度特性の1次の項に基づき、前記直流変換手段の出力信号の温度による変動を補正してもよい。
【0010】
(5)この角速度検出装置用回路であって、
前記温度特性補正手段の出力信号に基づいて角速度検出装置の故障の有無を判定する自己故障判定手段を含んでもよい。
【0011】
(6)この角速度検出装置用回路であって、
前記直流変換手段は、前記積分手段の前段と後段の少なくとも一方に信号を増幅する増幅手段を含んでもよい。
【0012】
(7)この角速度検出装置用回路であって、
前記温度特性補正手段の前段又は後段に、信号にオフセット値を加えるオフセット加算手段を含んでもよい。
【0013】
オフセット値は、正の値、負の値、0を含む任意の値とすることができる。
【0014】
(8)適用例に係る角速度検出装置は、
振動子と、前記振動子に接続され、角速度を検出する角速度検出回路とを有する角速度検出装置であって、
前記振動子は、駆動信号に基づいて励振振動し、回転運動と前記励振振動とによって生じるコリオリの力を得て、前記コリオリの力に基づく角速度成分と、前記励振振動に基づく励振振動成分と、を含む検出信号を出力し、
前記角速度検出回路は、前記検出信号が入力され、前記検出信号から前記自己振動成分を抽出する自己振動成分抽出手段と、
前記自己振動成分抽出手段の出力信号を積分する積分手段を含む直流変換手段と、
前記直流変換手段の出力信号の温度による変動を補正する温度特性補正手段とを含むことを特徴とする。
また、角速度の大きさに応じた角速度成分と、励振信号に基づく自己振動成分と、を含む信号を発生させる振動子と、前記信号が入力され、前記信号から前記自己振動成分を抽出する自己振動成分抽出手段と、前記自己振動成分抽出手段の出力信号を積分する積分手段を含む直流変換手段と、前記直流変換手段の出力信号の温度による変動を補正する温度特性補正手段と、を含むことを特徴としてもよい。
また、前記振動子は、検出用基部から延出している連結腕と、前記連結腕に配置された駆動用基部から前記連結腕の延出方向と交差する方向に延出している駆動振動片と、前記検出用基部から前記連結腕の延出方向と交差する方向に延出している検出振動片と、を含むことを特徴してもよい。
また、前記温度特性補正手段は、前記直流変換手段の出力信号における温度特性の1次の項に基づき、前記直流変換手段の出力信号の温度による変動を補正することを特徴としてもよい。
また、前記温度特性の1次の項を記憶する記憶手段を含み、前記温度特性補正手段は、前記記憶手段に記憶された前記温度特性の1次の項に基づき、前記直流変換手段の出力信号の温度による変動を補正することを特徴としてもよい。
また、前記温度特性補正手段の出力信号に基づいて角速度検出装置の故障の有無を判定する自己故障判定手段を含むことを特徴としてもよい。
また、前記直流変換手段は、前記積分手段の前段と後段の少なくとも一方に信号を増幅する増幅手段を含むことを特徴としてもよい。
また、前記温度特性補正手段の前段又は後段に、信号にオフセット値を加えるオフセット加算手段を含むことを特徴としてもよい。
【0015】
(9)適用例に係る故障判定システムは、
この角速度検出装置と、
前記温度特性補正手段の出力信号が入力され、前記角速度検出装置の故障の有無を判定する外部故障判定手段と、を含むことを特徴とする。
【図面の簡単な説明】
【0016】
【図1】本実施の形態に係る角速度検出装置の一例を示す回路ブロック図。
【図2】図2(A)〜図2(G)は、検出信号の角速度成分に着目した場合のタイミングチャート。
【図3】図3(A)〜図3(G)は、検出信号の自己振動成分に着目した場合のタイミングチャート。
【図4】温度と直流変換手段及び温度特性補正手段の出力信号電圧の関係の一例を示すグラフ。
【図5】温度特性補正手段の一例を示す回路図。
【図6】複数の故障判定機能を有する自己故障判定手段の一例を示す回路ブロック図。
【図7】温度特性補正手段の後段にオフセット加算手段を設けた角速度検出装置の構成例を示す回路ブロック図。
【図8】温度と直流変換手段、温度特性補正手段及びオフセット加算手段の出力信号電圧の関係の一例を示すグラフ。
【図9】オフセット加算手段の一例を示す回路図。
【図10】図10(A)及び図10(B)は、本実施の形態に係る故障判定システムの一例を示す回路ブロック図。
【図11】振動子の一例を示す平面図。
【図12】振動子の一例を示す平面図。
【図13】オフセット入力手段を有する同期検波回路の一例を示す回路図。
【発明を実施するための形態】
【0017】
以下、本発明の好適な実施形態について図面を用いて詳細に説明する。なお、以下に説明する実施の形態は、特許請求の範囲に記載された本発明の内容を不当に限定するものではない。また以下で説明される構成の全てが本発明の必須構成要件であるとは限らない。
【0018】
1.角速度検出装置
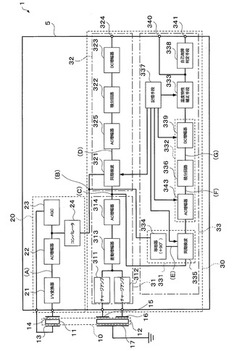
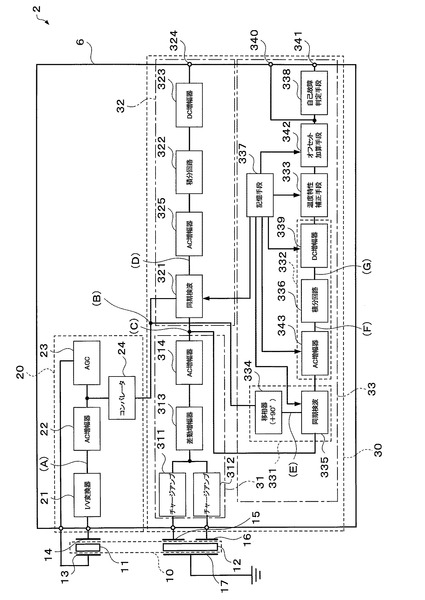
図1は、本実施の形態に係る角速度検出装置の一例を示す回路ブロック図である。
【0019】
本実施の形態に係る角速度検出装置1は、駆動回路20及び検出回路30を含む角速度検出回路5と、振動子10とを含んで構成されている。なお、駆動回路20と検出回路30は、同一基板上に構成することが可能である。
【0020】
2.振動子
振動子10は、駆動振動端子13、14から入力される駆動信号に基づいて励振振動し、励振振動した状態において、角速度運動が働くと、コリオリの力を得る。そして、振動子10は、コリオリの力に基づく角速度成分と、励振振動に基づく励振振動成分を含む検出信号を出力する。ここで、励振振動成分とコリオリ力に基づく角速度成分とは90°位相がずれている。
【0021】
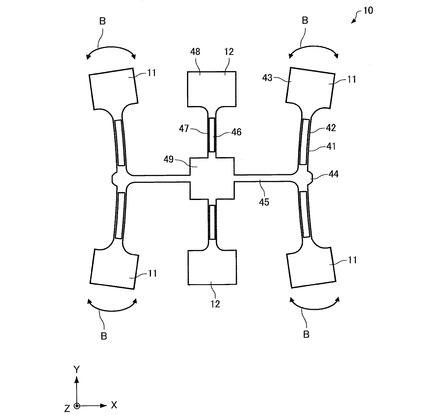
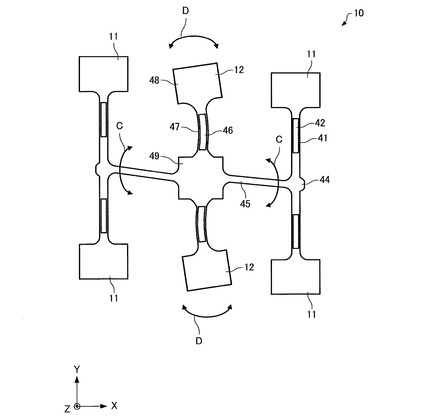
次に、水晶などの圧電材料の薄板から形成される振動子10の一例を図11、図12を
用いて説明する。振動子10は、駆動用基部44から駆動振動腕11(広義には、駆動用振動片)が水晶のY軸方向に延出している。駆動用基部44は、水晶のX軸方向に延びる連結腕45を介して検出用基部49に接続されている。検出振動腕12(広義には、検出振動片)は、検出用基部49からY軸方向に延出されている。
【0022】
駆動振動腕11の側面の駆動電極41と、駆動振動腕11の上面の駆動電極42との間に交番電圧/交番電流からなる駆動信号が与えられると、圧電効果によって駆動振動腕11は、矢印Bのように屈曲振動する。ここで、図12のように振動子10が水晶のZ軸を回転軸とした回転運動をすると、駆動振動腕11は、矢印Bの屈曲振動の方向とZ軸の両方に垂直な方向にコリオリの力を得る。その結果、連結腕45は矢印Cで示すような振動をする。そして、検出振動腕12は、連結腕45の振動(矢印C)に連動して、連結腕45と矢印Dのような屈曲振動をする。
【0023】
また、駆動振動腕11の振動は、駆動用基部44と連結部45と検出用基部49とを伝わり、検出振動腕12に漏れ振動を発生させる。この漏れ振動は、コリオリの力に基づいた振動と同様に矢印Dに示す屈曲振動であるが、位相が90°ずれている。
【0024】
そして、これらの屈曲振動に基づいて、発生する逆圧電効果によって、検出振動腕の側面の検出電極47と、上面の検出電極46との間には、交番電圧/交番電流が発生する。検出振動腕の側面の検出電極47と上面の検出電極46の一方を接地端子17に接続し、もう一方を検出端子15、16に接続する。以上のようにして、検出端子15、16へ出力される検出信号は、コリオリの力に基づく角速度成分と、駆動振動の励振振動に基づく漏れ成分(自己振動成分)とが含まれる。
【0025】
図11、図12の構成では、振動子のバランスを良くするために、検出用基部49を中央に配置し、検出用基部49から+Y軸と−Y軸の両方向に検出振動腕12を延出させている。さらに、検出用基部49から+X軸と−X軸の両方向に連結腕45を延出させ、連結腕のそれぞれから、+Y軸と−Y軸の両方向に駆動振動腕11を延出させている。
【0026】
また、駆動振動腕11の先端を幅広の幅広部43にし、さらに、錘を付けることでコリオリの力を大きくしている。また、錘効果によって、所望の共振周波数を、短い振動腕で得ることができる。同様の理由で、検出振動腕12の先端を幅広の幅広部48にし、さらに、錘を付けている。
【0027】
なお、振動子10は、上述の構成に限らず、コリオリの力に基づく角速度成分と、励振振動に基づく漏れ成分とを含む検出信号を出力する振動子であれば良い。例えば、駆動振動腕と検出振動腕とを兼ねる構成であっても良く、また、駆動振動腕や検出振動腕に圧電膜を形成した構成であっても良い。
【0028】
3.角速度検出回路
角速度検出回路は、駆動回路20と検出回路30を含む。検出用振動片12には検出端子15及び16と接地端子17が設けられ、検出端子15及び16は検出回路30に接続されている。検出端子15及び16からは、互いに逆位相の検出信号が出力されるように構成されている。
【0029】
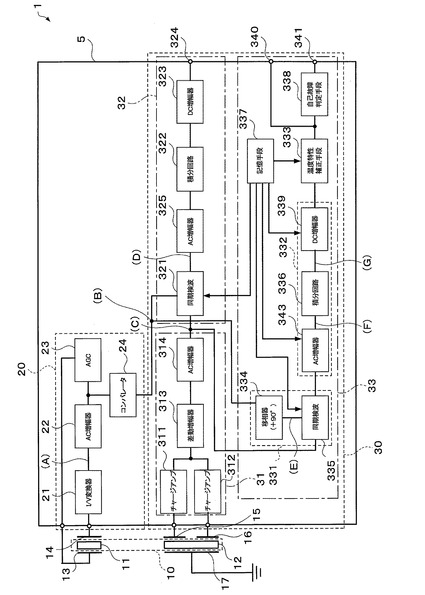
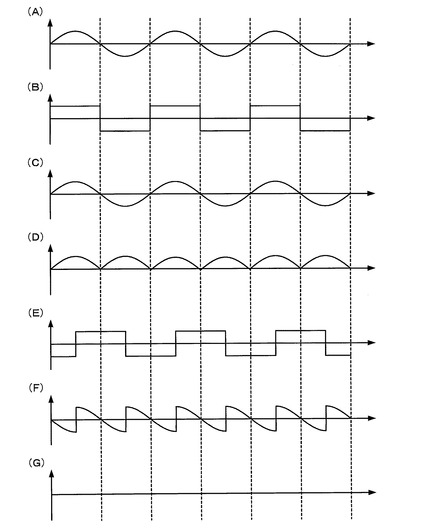
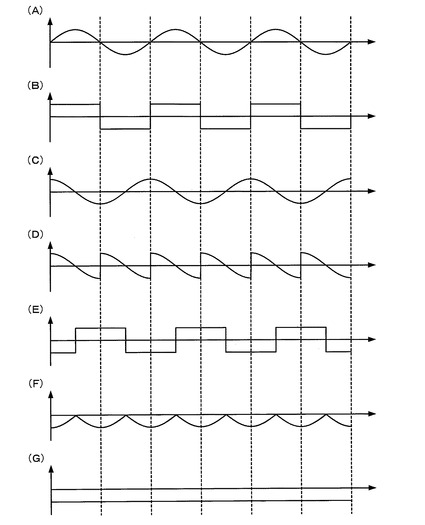
図2(A)〜図2(G)は、図1に示す回路ブロック図内の各点(A)〜(G)において、検出信号の角速度成分に着目した場合のタイミングチャートであり、図3(A)〜図3(G)は、図1に示す回路ブロック図内の各点(A)〜(G)において、検出信号の自己振動成分に着目した場合のタイミングチャートである。横軸は時間、縦軸は電圧を表す。
【0030】
駆動回路20は、駆動信号を出力して振動子10を駆動し、振動子10からフィードバック信号を受ける。これにより振動子10を励振させる。検出回路30は、駆動信号により駆動される振動子10からの検出信号を受け、検出信号からコリオリの力に基づく角速度成分を抽出する。
【0031】
本実施の形態における駆動回路20は、電流電圧変換器21、AC増幅器22、自動利得制御回路23及びコンパレータ24を含んで構成されている。
【0032】
駆動用振動片11が振動すると、圧電効果に基づく電流がフィードバック信号として駆動端子14から出力され、電流電圧変換器21に入力される。電流電圧変換器21は、駆動用振動片11の振動周波数と同一の周波数の交流電圧信号が出力する(図2(A)、図3(A))。
【0033】
電流電圧変換器21から出力された交流電圧信号は、AC増幅器22に入力される。AC増幅器は、入力される交流電圧信号を増幅する。
【0034】
AC増幅器22から出力された交流電圧信号は自動利得制御回路23に入力される。自動利得制御回路23は、入力された交流電圧信号の振幅を一定値に保持するように利得を制御し、利得制御後の交流電圧信号を駆動端子13に出力する。この駆動端子13に入力される交流電圧信号により振動子10が駆動される。
【0035】
AC増幅器22が増幅した交流電圧信号はコンパレータ24に入力され、交流電圧信号の振幅中心を基準電圧として、交流電圧信号と基準電圧信号との比較結果に応じて出力レベルを切り替える方形波電圧信号(図2(B))を、検出回路30に出力する。
【0036】
本実施の形態における検出回路30は、検出信号増幅部31、角速度成分抽出部32及び自己振動成分抽出部33を含んで構成されている。
【0037】
検出信号増幅部31は、チャージアンプ311及び312、差動増幅器313並びにAC増幅器314を含んで構成されている。
【0038】
チャージアンプ311及び312は、それぞれ検出端子15及び16に接続され、互いに逆位相の検出信号が入力される。チャージアンプ311及び312で電荷電圧変換された信号は差動増幅器313に入力される。差動増幅器313は(チャージアンプ311の出力信号)−(チャージアンプ312の出力信号)として差動増幅する。差動増幅器313の出力信号は、さらにAC増幅器314で増幅される。なお、チャージアンプ311及び312での増幅の際には信号の位相が90度進む。
【0039】
検出端子15及び16から出力される検出信号は、振動子10に働くコリオリの力に基づく角速度成分と、振動子10の励振振動に基づく自己振動成分(漏れ信号成分)を含んでいる。角速度成分抽出部32は、検出信号増幅部31の出力信号から角速度成分を抽出する。また、自己振動成分抽出部33は、検出信号増幅部31の出力信号から自己振動成分を抽出する。
【0040】
角速度成分抽出部32は、同期検波回路321、AC増幅器325、積分回路322、DC増幅器323及び出力端子324を含んで構成されている。同期検波回路321は、コンパレータ24が出力する方形波電圧信号(図2(B))を基に、検出信号増幅部31の出力信号を同期検波することにより角速度成分を抽出する。同期検波回路321で抽出された角速度成分信号は、AC増幅器325で増幅され、積分回路322で積分された後
、DC増幅器323で増幅され、出力端子324から直流電圧信号として出力される。
【0041】
自己振動成分抽出部33は、自己振動成分抽出手段331、直流変換手段332及び温度特性補正手段333を含んで構成されている。
【0042】
自己振動成分抽出手段331は、位相を90度進ませる移相器334と同期検波回路335で構成されている。自己振動成分抽出手段331は、コンパレータ24が出力する方形波電圧信号(図2(B))を移相器334により位相を90度進ませた信号を基に、検出信号増幅部31の出力信号を同期検波することにより自己振動成分を抽出する。
【0043】
直流変換手段332は、自己振動成分抽出手段331の出力信号を積分する積分手段として機能する積分回路336を含んで構成され、自己振動成分抽出手段331の出力信号を直流電圧信号に変換する。また、積分回路336の前段にAC増幅器343、積分回路336の後段にDC増幅器339を設ける。
【0044】
これらの回路の動作を、図2(A)〜図2(G)及び図3(A)〜図3(G)を用いて説明する。検出信号の角速度成分に着目した場合の動作は図2(A)〜図2(G)を用いて、検出信号の自己振動成分に着目した場合の動作は図3(A)〜図3(G)を用いて説明する。本実施の形態においては、検出端子15から出力される検出信号の角速度成分は、駆動端子14から出力されるフィードバック信号よりも位相が90度遅れた信号となるものとし、検出端子15から出力される検出信号の自己振動成分は、駆動端子14から出力されるフィードバック信号と同位相の信号となるものとする。
【0045】
まず、検出信号の角速度成分に着目した場合の動作について説明する。検出端子15から出力される検出信号の角速度成分はチャージアンプ311で電荷電圧変換される。この際、位相が90度進む。したがって、差動増幅器313及びAC増幅器314で増幅された後の信号は、図2(C)に示すように、図2(A)に示すフィードバック信号と同位相となる。
【0046】
このAC増幅器314の出力信号を、図2(B)に示すコンパレータ24の出力信号を基に同期検波回路321で同期検波すると、同期検波回路321の出力信号は図2(D)に示す全波整流波形となる。この同期検波回路321の出力信号を積分回路322で積分することにより、検出信号の角速度成分を直流電圧として検出することができる。このように、角速度成分抽出部32では検出信号の角速度成分を抽出することができる。また、積分回路322の前段のAC増幅回路や後段のDC増幅器323で信号を増幅することで、感度を調整する。
【0047】
一方、AC増幅器314の出力信号を、コンパレータ24の出力信号を移相器334で位相を90度進めた信号(図2(E))を基に同期検波回路335で同期検波すると、同期検波回路335の出力信号は図2(F)に示す波形となる。この同期検波回路335の出力信号を積分回路336で積分すると、図2(G)に示すように直流電圧は0となる。このように、自己振動成分抽出部33では検出信号の角速度成分は打ち消されることになる。
【0048】
次に、検出信号の自己振動成分に着目した場合の動作について説明する。検出端子15から出力される検出信号の自己振動成分はチャージアンプ311で電荷電圧変換される。この際、位相が90度進む。したがって、差動増幅器313及びAC増幅器314で増幅された後の信号は、図3(C)に示すように、図3(A)に示すフィードバック信号よりも位相が90度進んだ信号となる。
【0049】
このAC増幅器314の出力信号を、図3(B)に示すコンパレータ24の出力信号を基に同期検波回路321で同期検波すると、同期検波回路321の出力信号は図3(D)に示す波形となる。この同期検波回路321の出力信号を積分回路322で積分すると、直流電圧は0となる。このように、角速度成分抽出部32では検出信号の自己振動成分は打ち消されることになる。
【0050】
一方、AC増幅器314の出力信号を、図3(E)に示すコンパレータ24の出力信号を移相器334で位相を90度進めた信号を基に同期検波回路335で同期検波すると、同期検波回路335の出力信号は図3(F)に示す全波整流波形となる。この同期検波回路335の出力信号を積分回路336で積分すると、図3(G)に示すように図3(F)に示す全波整流波形の波高に比例した直流電圧となる。このように、自己振動成分抽出部33では検出信号の自己振動成分を抽出することができる。
【0051】
振動子10に故障があった場合、例えば振動子10に異物が付着したり、振動子10が破損したりした場合には、振動子10の励振振動に基づく自己振動成分の大きさが変化する。したがって、自己振動成分抽出部33で検出信号の自己振動成分を抽出し、角速度検出装置1の内部又は外部で検出信号の自己振動成分の大きさを監視することにより、振動子10に故障があるか否かを判定することができる。例えば、検出信号の自己振動成分の大きさが上限基準値を上回った場合や下限基準値を下回った場合には、振動子10に故障があるものと判定することができる。
【0052】
しかし、振動子10の励振振動に基づく自己振動成分の大きさには、振動子ごとに温度特性がある。したがって、従来の角速度検出装置では、温度特性による変動と故障による変動との判別が難しく、精度のよい故障判定は難しかった。
【0053】
本実施の形態に係る角速度検出回路5は、温度特性補正手段333を有している。温度特性補正手段333は、直流変換手段332の出力信号の温度による変動を補正する。例えば、温度特性補正手段333は、直流変換手段332の出力信号の大きさが温度によらず一定となるように補正することができる。このため、直流変換手段332の出力信号の温度による変動を打ち消すことができ、故障による変動を精度よく検出することができる。したがって、振動子の故障検出精度を高めた角速度検出回路を実現することができる。
【0054】
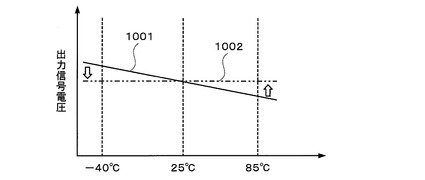
図4は、温度と直流変換手段332及び温度特性補正手段333の出力信号電圧の関係の一例を示すグラフである。横軸は温度、縦軸は出力信号電圧を示す。
【0055】
直流変換手段332の出力信号電圧は、図4の実線1001で示すように、温度により大きさが異なる。温度特性補正手段333は、その出力信号電圧が図4の二点破線1002で示すように温度によらず一定となる方向(例えば、図4の白抜き矢印方向)に補正して出力する。図4においては、25℃での出力信号電圧を基準にして出力信号電圧を補正する例を示している。
【0056】
また、本願の発明者は、直流変換手段332の出力信号の温度による変動は、ほぼ1次の傾きで近似できることを見出した。したがって、温度特性補正手段333は、直流変換手段332の出力信号の温度特性の1次の項に基づき、直流変換手段332の出力信号の温度による変動を補正するように構成することも可能である。
【0057】
さらに、角速度検出回路5は温度特性の1次の項を記憶する記憶手段337を含み、温度特性補正手段333は、直流変換手段332の出力信号に記憶手段337に記憶された温度特性の1次の項に基づき、直流変換手段332の出力信号の温度による変動を補正するように構成してもよい。記憶手段337は、例えばEEPROMのような不揮発性メモ
リで構成することができる。これにより、例えば角速度検出装置1の検査工程において温度特性補正手段333の出力電圧を測定し、この出力電圧が温度によらずほぼ一定の値となるような温度特性の1次の項を記憶手段337に書き込むことができる。したがって、振動子ごとに異なる温度特性を有する場合にも、適切な温度特性補正が可能になる。
【0058】
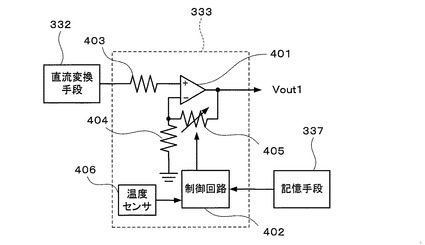
図5は、本実施の形態に係る角速度検出回路5に適用可能な温度特性補正手段333の一例を示す回路図である。図5に示す温度特性補正手段333は、演算増幅器401、制御回路402、抵抗403及び404、可変抵抗405を含んで構成されている。
【0059】
直流変換手段332の出力信号は、抵抗403を介して演算増幅器401の非反転入力端子に入力される。制御回路402は、記憶手段337に記憶された温度特性の1次の項と温度センサ406で検出される温度に基づき可変抵抗405の抵抗値を制御する。演算増幅器401は、非反転入力端子に入力された信号と反転入力端子に入力された電位を差動増幅し、出力電圧Vout1として出力する。出力電圧Vout1は、抵抗404を介して演算増幅器401の反転入力端子にもフィードバックされる。
【0060】
演算増幅器401の増幅率Aは抵抗404の抵抗値R4と可変抵抗405の抵抗値R5を用いて、A=1+R5/R4で表される。したがって、可変抵抗405の抵抗値R5を制御することにより、演算増幅器401の増幅率を制御することができる。
【0061】
このように、温度特性補正手段333を図5に示すように構成した場合には、記憶手段337に記憶される温度特性の1次の項を適切に設定することにより、出力電圧Vout1を温度によらずほぼ一定にすることができる。
【0062】
本実施の形態に係る角速度検出回路5は、さらに、温度特性補正手段333の出力信号Vout1に基づいて角速度検出装置1の故障の有無を判定する自己故障判定手段338を含んでもよい。自己故障判定手段338は、温度特性補正手段333の出力信号Vout1が上限基準値を上回った場合や下限基準値を下回った場合に、振動子10に故障があるものと判定し、判定結果に基づく出力信号を出力する。図1に示す回路ブロック図においては、出力端子341を介して角速度検出回路5の外部に出力信号を出力している。角速度検出回路5が自己故障判定手段338を含むことにより、角速度検出装置1自身が振動子10に故障があるか否かを判定することができる。
【0063】
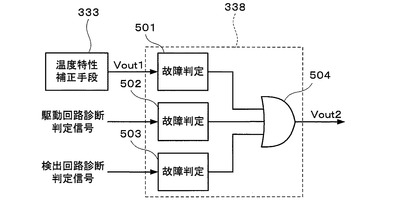
なお、自己故障判定手段338は、他の故障判定信号に基づく故障判定機能を有していてもよい。図6は、複数の故障判定機能を有する自己故障判定手段338の一例を示す回路ブロック図である。図6に示す例では、自己故障判定手段338には、振動子10の故障の有無の判定に用いる温度特性補正手段333の出力信号Vout1の他に、駆動回路20の故障の有無の判定に用いる駆動回路診断判定信号と、検出回路30の故障の有無の判定に用いる検出回路診断判定信号が入力されるものとする。
【0064】
図6に示す自己故障判定手段338は、故障判定回路501乃至503とOR回路504を含んで構成されている。故障判定回路501乃至503は、それぞれの入力信号に基づき、故障があるものと判定した場合にはHighレベルの出力信号を、故障がないものと判定した場合にはLowレベルの出力信号を出力するものとする。
【0065】
故障判定回路501は、温度特性補正手段333の出力信号Vout1が上限基準値を上回った場合や下限基準値を下回った場合に、振動子10に故障があるものと判定し、判定結果に基づく出力信号をOR回路504に出力する。故障判定回路502は、駆動回路診断判定信号が上限基準値を上回った場合や下限基準値を下回った場合に、駆動回路20に故障があるものと判定し、判定結果に基づく出力信号をOR回路504に出力する。故
障判定回路503は、検出回路診断判定信号が上限基準値を上回った場合や下限基準値を下回った場合に、検出回路30に故障があるものと判定し、判定結果に基づく出力信号をOR回路504に出力する。
【0066】
OR回路504は、故障判定回路501乃至503のいずれかからHighレベルの出力信号が入力された場合には、Highレベルの出力信号Vout2を出力する。故障判定回路501乃至503のいずれもからLowレベルの出力信号が入力された場合には、Lowレベルの出力信号Vout2を出力する。
【0067】
このように、自己故障判定回路338を図6に示す回路ブロック図のように構成すると、角速度検出装置1のいずれかに故障があるか否かを判定し、出力信号Vout2として出力することができる。
【0068】
本実施の形態に係る角速度検出回路5の直流変換手段332は、積分手段として機能する積分回路336の前段のAC増幅器343又は後段のDC増幅器339に、信号を所望の倍率で増幅又は減衰する増幅手段を含んでもよい。図1に示す回路ブロック図においては、積分回路336の後段に設けられているDC増幅器339が増幅手段として機能する。
【0069】
振動子10の励振振動に基づく自己振動成分の大きさは、振動子10の故障モードのよって異なる。例えば振動子10が破損した場合の振動子10の励振振動に基づく自己振動成分の変動は、振動子10に異物が付着した場合の振動子10の励振振動に基づく自己振動成分の変動よりも大きい。
【0070】
積分回路336の前段のAC増幅器343又は後段のDC増幅器339を設けると、DC増幅器339の増幅率を変更することで、直流変換手段332の出力感度を変更することが可能になる。したがって、検出したい故障モードに応じてDC増幅器339の増幅率を設定することにより、所望の故障モードに対応した故障判定が可能になる。
【0071】
また、温度特性補正手段として、DC増幅器339のゲインを調整するゲイン調整回路を設けても良い。その場合、DC増幅器339の出力の温度依存が低下する。
【0072】
本実施の形態に係る角速度検出回路5は、温度特性補正手段333の出力信号Vout1を出力する出力端子340を含んでもよい。温度特性補正手段333の出力信号Vout1を角速度検出回路5の外部に出力することにより、角速度検出装置1の外部において、より詳細な故障判定が可能になる。例えば、角速度検出装置1の大きさなどの制約により角速度検出装置1の内部ではできない複雑な演算処理を、角速度検出装置1の外部に設けられたマイコンなどによって行うことにより、より詳細な故障判定が可能になる。
【0073】
また、出力端子340は、角速度検出装置1の検査工程において温度特性補正手段333の出力電圧を測定するために用いることも可能である。
【0074】
〔変形例〕
上述の角速度検出装置1の構成に加え、温度特性補正手段333の前段又は後段に、信号にオフセット値を加えるオフセット加算手段342を含んで構成することも可能である。図7は、温度特性補正手段333の後段にオフセット加算手段342を設けた角速度検出装置2の構成例を示す回路ブロック図である。なお、図1を用いて説明した角速度検出装置1と同一の構成については同一の符号を付し、その詳細な説明を省略する。
【0075】
振動子10の励振振動に基づく自己振動成分の大きさは、振動子ごとに個体差がある。
したがって、従来の角速度検出回路では、振動子に応じて判定条件を変更しなければ精度のよい故障判定は難しかった。
【0076】
本実施の形態に係る角速度検出回路6は、オフセット加算手段342を有している。オフセット加算手段342は、温度特性補正手段333の出力信号に所望のオフセット値を加える。
【0077】
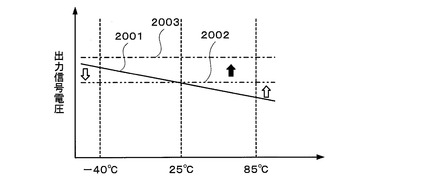
図8は、温度と直流変換手段332、温度特性補正手段333及びオフセット加算手段342の出力信号電圧の関係の一例を示すグラフである。横軸は温度、縦軸は出力信号電圧を示す。
【0078】
直流変換手段332の出力信号電圧は、図8の実線2001で示すように、温度により大きさが異なる。温度特性補正手段333は、その出力信号電圧が図8の二点破線2002で示すように温度によらず一定となる方向(例えば、図8の白抜き矢印方向)に補正して出力する。図8においては、25℃での出力信号電圧を基準にして出力信号電圧を補正する例を示している。
【0079】
オフセット加算手段342は、オフセット加算手段342の出力電圧が所望の値となるようなオフセット値を温度特性補正手段333の出力信号に加えて出力する。例えば、図8の黒矢印方向にオフセット値を加算することにより、一点破線2003で示すオフセット加算手段342の出力信号電圧を所望の値に設定することができる。
【0080】
これにより、振動子10の励振振動に基づく自己振動成分の大きさの温度特性による変動を補正することに加え、振動子10の個体差による励振振動に基づく自己振動成分の大きさのばらつきを補正し、出力電圧の大きさを揃えることができる。したがって、角速度検出装置ごとに判定条件を変更することなく、振動子の故障検出精度をさらに高めた角速度検出装置を実現することができる。
【0081】
さらに、角速度検出装置2はオフセット値を記憶する記憶手段を含み、オフセット加算手段342は、温度特性補正手段333の出力信号に記憶手段337に記憶されたオフセット値を加えるように構成してもよい。記憶手段は、温度特性補正手段333で用いる温度特性の1次の項を記憶する記憶手段337と兼用する構成も可能である。これにより、例えば角速度検出装置2の検査工程においてオフセット加算手段342の出力電圧を測定し、この出力電圧が所望の値となるようなオフセット値を記憶手段337に書き込むことにより、振動子10の個体差による励振振動に基づく自己振動成分の大きさのばらつきを補正し、出力電圧の大きさを揃えることができる。
【0082】
また、温度特性補正手段として、DC増幅器339のゲインを調整するゲイン調整回路を設けても良い。その場合、DC増幅器339の出力の温度依存が低下する。
【0083】
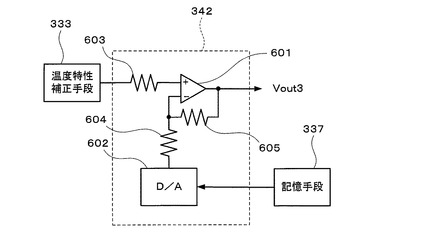
図9は、本実施の形態に係る角速度検出装置2に適用可能なオフセット加算手段342の一例を示す回路図である。図9に示すオフセット加算手段342は、演算増幅器601、D/Aコンバータ602、抵抗603乃至605を含んで構成されている。
【0084】
温度特性補正手段333の出力信号は、抵抗603を介して演算増幅器601の非反転入力端子に入力される。D/Aコンバータ602は、記憶手段337に記憶されたオフセット値に基づき電圧信号を出力する。D/Aコンバータ602が出力した電圧信号は、抵抗604を介して演算増幅器401の反転入力端子に入力される。演算増幅器601は、非反転入力端子に入力された信号と反転入力端子に入力された信号を差動増幅し、出力電圧Vout3として出力する。出力電圧Vout3は、抵抗605を介して演算増幅器6
01の反転入力端子にもフィードバックされる。
【0085】
このように、オフセット加算手段342を図9に示すように構成した場合には、記憶手段337に記憶されるオフセット値を適切に設定することにより、出力電圧Vout3を所望の値に設定することができる。
【0086】
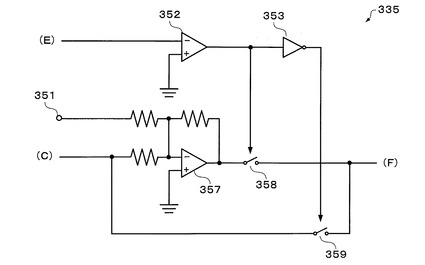
また、同期検波回路335として、図13に示すような、同期検波回路335(自己振動抽出手段331)の出力信号にオフセット値を加えるオフセット入力手段を有する同期検波回路を用いても良い。被同期検波信号信号(C)は、分岐して、一方は、反転せずに非反転信号としてスイッチ359に入力され、もう一方は反転アンプ357によって反転して、スイッチ358に入力される。基準信号によって、スイッチ358、359が交互に接続されることで、非反転信号と、反転信号が交互に出力されることによって同期検波信号(F)が出力される。また、オフセット入力端子351からオフセット信号が反転信号に重畳される。その結果、スイッチ358、359が被同期信号の反転信号を選択して出力するタイミングにおいて、オフセット信号が同期検波信号(F)に重畳され、スイッチ358、359が被同期信号の非反転信号を選択して出力するタイミングにおいて、オフセット信号が同期検波信号(F)に重畳されない。このようにして、オフセット信号は重畳/非重畳を繰り返すが、後段の積分回路336において平滑化され、一定レベルのオフセット値を得ることになる。なお、オフセット信号を非反転信号に重畳する構成にすることも可能である。
【0087】
また、同様に、角速度検出部32の同期検波回路321にオフセット信号入力手段を有する同期検波回路を用いても良い。
【0088】
4.故障判定システム
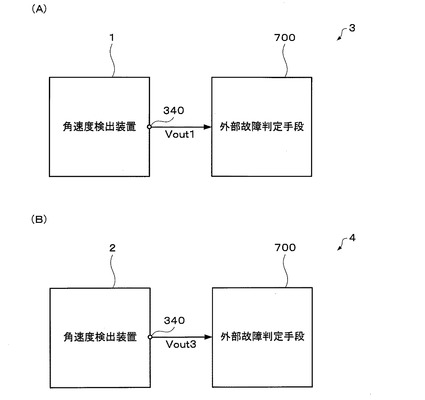
図10(A)及び図10(B)は、本実施の形態に係る故障判定システムの一例を示す回路ブロック図である。
【0089】
図10(A)に示す本実施の形態に係る故障判定システム3は、角速度検出装置1を含む。なお、角速度検出装置1の構成及び動作は図1乃至図6を用いて説明した通りであるため、同一の構成には同一の符号を付し、その詳細な説明を省略する。
【0090】
本実施の形態に係る故障判定システム3は、角速度検出装置1の出力端子340からの出力信号Vout1に基づいて角速度検出装置1の故障の有無を判定する外部故障判定手段700を含む。外部故障判定手段700は、例えばマイコンにより構成することが可能である。
【0091】
外部故障判定手段700は、例えば、角速度検出装置1の出力信号Vout1が上限基準値を上回った場合や下限基準値を下回った場合に、角速度検出装置1の振動子10に故障があるものと判定することができる。また例えば、外部故障判定手段700は、角速度検出装置1の大きさなどの制約により角速度検出装置1の内部ではできない複雑な演算処理を行うことにより、より詳細な故障判定を行うこともできる。
【0092】
〔変形例〕
上述の故障判定システム3の角速度検出装置1を角速度検出装置2に置き換えて構成することも可能である。図10(B)に示す本実施の形態に係る故障判定システム4は、角速度検出装置2を含む。なお、角速度検出装置2の構成及び動作は図1乃至図9を用いて説明した通りであるため、同一の構成には同一の符号を付し、その詳細な説明を省略する。
【0093】
本実施の形態に係る故障判定システム4において、外部故障判定手段は、角速度検出装置2の出力端子340からの出力信号Vout3に基づいて角速度検出装置2の故障の有無を判定する。
【0094】
故障判定システム4は、角速度検出装置1に代えて角速度検出装置2を用いることにより、より精度よく故障判定を行うことができる。
【0095】
なお、本発明は本実施形態に限定されず、本発明の要旨の範囲内で種々の変形実施が可能である。
【0096】
本発明は、実施の形態で説明した構成と実質的に同一の構成(例えば、機能、方法及び結果が同一の構成、あるいは目的及び効果が同一の構成)を含む。また、本発明は、実施の形態で説明した構成の本質的でない部分を置き換えた構成を含む。また、本発明は、実施の形態で説明した構成と同一の作用効果を奏する構成又は同一の目的を達成することができる構成を含む。また、本発明は、実施の形態で説明した構成に公知技術を付加した構成を含む。
【符号の説明】
【0097】
1,2 角速度検出装置、3,4 故障判定システム、5,6 角速度検出回路、10 振動子、11 駆動用振動片(駆動振動腕)、12 検出用振動片(検出振動腕)、13,14 駆動端子、15,16 検出端子、17 接地端子、20 駆動回路、21 電流電圧変換器、22 AC増幅器、23 自動利得制御回路、24 コンパレータ、41,42 駆動電極、43,48 幅広部、44 駆動用基部、45 連結腕、46,47
検出電極、49 検出用基部、30 検出回路、31 検出信号増幅部、32 角速度信号抽出部、33 自己振動成分抽出部、311,312 チャージアンプ、313 差動増幅器、314 AC増幅器、321 同期検波回路、322 積分回路、323 DC増幅器、324 出力端子、331 自己振動成分抽出手段、332 直流変換手段、333 温度特性補正手段、334 移相器、335 同期検波回路、336 積分回路、337 記憶手段、338 自己故障判定手段、339 DC増幅器、340,341
出力端子、342 オフセット加算手段、343 AC増幅器、351 オフセット入力端子、357 反転アンプ、358,359 スイッチ、401 演算増幅器、402
制御回路、403,404 抵抗、405 可変抵抗、406 温度センサ、501,502,503 故障判定回路、504 OR回路、601 演算増幅器、602 D/Aコンバータ、603,604,605 抵抗、700 外部故障判定手段
【技術分野】
【0001】
本発明は、角速度検出回路、角度検出装置及び故障判定システムに関する。
【背景技術】
【0002】
振動子に働くコリオリの力を利用して角速度を検出する角速度検出装置が広く使用されている。近年、このような角度検出装置において、振動子の励振振動に基づく自己振動成分を利用して自己の故障検出が可能な角速度検出装置が開発されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2000−171257号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
振動子の励振振動に基づく自己振動成分の大きさには、振動子ごとに温度特性がある。したがって、従来の角速度検出装置では、温度特性による変動と故障による変動との判別が難しく、精度のよい故障判定は難しかった。
【0005】
本発明は、以上のような事情に鑑みてなされたものであり、振動子の故障検出精度を高めた角速度検出回路、角速度検出装置及び故障判定システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
(1)本発明に係る角速度検出装置用回路は、振動子から、角速度の大きさに応じた第1成分と、励振振動に基づく第2成分と、を含む信号が入力され、前記信号から前記第2成分を抽出する自己振動成分抽出手段と、前記自己振動成分抽出手段の出力信号の温度による変動を補正する温度特性補正手段と、を含むことを特徴とする角速度検出装置用回路である。
この角速度検出装置用回路において、前記振動子は、検出用基部から延出している連結腕と、前記連結腕に配置された駆動用基部から前記連結腕の延出方向と交差する方向に延出している駆動振動片と、前記検出用基部から前記連結腕の延出方向と交差する方向に延出している検出振動片と、を含むことを特徴としてもよい。
この角速度検出装置用回路において、前記温度特性補正手段は、前記自己振動成分抽出手段の出力信号における温度特性の1次の項に基づき、前記自己振動成分抽出手段の出力信号の温度による変動を補正することを特徴としてもよい。
この角速度検出装置用回路において、前記温度特性の1次の項を記憶する記憶手段を含み、前記温度特性補正手段は、前記記憶手段に記憶された前記温度特性の1次の項に基づき、前記自己振動成分抽出手段の出力信号の温度による変動を補正することを特徴としてもよい。
この角速度検出装置用回路において、前記温度特性補正手段の出力信号を監視し判定する判定手段を含むことを特徴としてもよい。
この角速度検出装置用回路において、前記自己振動抽出手段の前段と後段の少なくとも一方に信号を増幅する増幅手段を含むことを特徴としてもよい。
この角速度検出装置用回路において、前記温度特性補正手段の前段又は後段に、信号にオフセット値を加えるオフセット加算手段を含むことを特徴としてもよい。
本発明に係る角速度検出装置は、角速度の大きさに応じた第1成分と、励振信号に基づく第2成分と、を含む信号を発生させる振動子と、前記信号が入力され、前記信号から前
記第2成分を抽出する自己振動成分抽出手段と、前記自己振動成分抽出手段の出力信号の温度による変動を補正する温度特性補正手段と、を含むことを特徴とする角速度検出装置である。
この角速度検出装置において、前記振動子は、検出用基部から延出している連結腕と、前記連結腕に配置された駆動用基部から前記連結腕の延出方向と交差する方向に延出している駆動振動片と、前記検出用基部から前記連結腕の延出方向と交差する方向に延出している検出振動片と、を含むことを特徴としてもよい。
この角速度検出装置において、前記温度特性補正手段は、前記自己振動成分抽出手段の出力信号における温度特性の1次の項に基づき、前記自己振動成分抽出手段の出力信号の温度による変動を補正することを特徴としてもよい。
この角速度検出装置において、前記温度特性の1次の項を記憶する記憶手段を含み、前記温度特性補正手段は、前記記憶手段に記憶された前記温度特性の1次の項に基づき、前記自己振動成分抽出手段の出力信号の温度による変動を補正することを特徴としてもよい。
この角速度検出装置において、前記温度特性補正手段の出力信号を監視し判定する判定手段を含むことを特徴としてもよい。
この角速度検出装置において、前記自己振動成分抽出手段の前段と後段の少なくとも一方に信号を増幅する増幅手段を含むことを特徴としてもよい。
この角速度検出装置において、前記温度特性補正手段の前段又は後段に、信号にオフセット値を加えるオフセット加算手段を含むことを特徴としてもよい。
本発明に係る故障判定システムは、上述の角速度検出装置と、前記温度特性補正手段の出力信号が入力され、前記角速度検出装置の故障の有無を判定する外部故障判定手段と、を含むことを特徴とする故障判定システムである。
(2)適用例に係る角速度検出装置用回路は、
駆動信号に基づいて励振振動する振動子に接続され、角速度を検出する角速度検出回路であって、
前記振動子から、コリオリの力に基づく角速度成分と、前記励振振動に基づく自己振動成分とを含む検出信号が入力され、前記検出信号から前記自己振動成分を抽出する自己振動成分抽出手段と、
前記自己振動成分抽出手段の出力信号を積分する積分手段を含む直流変換手段と、
前記直流変換手段の出力信号の温度による変動を補正する温度特性補正手段とを含むことを特徴とする。
また、振動子から、角速度の大きさに応じた角速度成分と、励振振動に基づく自己振動成分と、を含む信号が入力され、前記信号から前記自己振動成分を抽出する自己振動成分抽出手段と、前記自己振動成分抽出手段の出力信号を積分する積分手段を含む直流変換手段と、前記直流変換手段の出力信号の温度による変動を補正する温度特性補正手段と、を含むことを特徴としてもよい。
また、前記振動子は、検出用基部から延出している連結腕と、前記連結腕に配置された駆動用基部から前記連結腕の延出方向と交差する方向に延出している駆動振動片と、前記検出用基部から前記連結腕の延出方向と交差する方向に延出している検出振動片と、を含むことを特徴としてもよい。
【0007】
適用例によれば、温度特性補正手段を設けることにより、振動子の励振振動に基づく自己振動成分の大きさの温度特性による変動を補正することができる。このため、故障による変動を精度よく検出することができる。したがって、振動子の故障検出精度を高めた角速度検出回路を実現することができる。
【0008】
(3)この角速度検出装置用回路であって、
前記温度特性補正手段は、前記直流変換手段の出力信号における温度特性の1次の項に基づき、前記直流変換手段の出力信号の温度による変動を補正してもよい。
【0009】
(4)この角速度検出装置用回路であって、
前記温度特性の1次の項を記憶する記憶手段を含み、
前記温度特性補正手段は、前記記憶手段に記憶された前記温度特性の1次の項に基づき、前記直流変換手段の出力信号の温度による変動を補正してもよい。
【0010】
(5)この角速度検出装置用回路であって、
前記温度特性補正手段の出力信号に基づいて角速度検出装置の故障の有無を判定する自己故障判定手段を含んでもよい。
【0011】
(6)この角速度検出装置用回路であって、
前記直流変換手段は、前記積分手段の前段と後段の少なくとも一方に信号を増幅する増幅手段を含んでもよい。
【0012】
(7)この角速度検出装置用回路であって、
前記温度特性補正手段の前段又は後段に、信号にオフセット値を加えるオフセット加算手段を含んでもよい。
【0013】
オフセット値は、正の値、負の値、0を含む任意の値とすることができる。
【0014】
(8)適用例に係る角速度検出装置は、
振動子と、前記振動子に接続され、角速度を検出する角速度検出回路とを有する角速度検出装置であって、
前記振動子は、駆動信号に基づいて励振振動し、回転運動と前記励振振動とによって生じるコリオリの力を得て、前記コリオリの力に基づく角速度成分と、前記励振振動に基づく励振振動成分と、を含む検出信号を出力し、
前記角速度検出回路は、前記検出信号が入力され、前記検出信号から前記自己振動成分を抽出する自己振動成分抽出手段と、
前記自己振動成分抽出手段の出力信号を積分する積分手段を含む直流変換手段と、
前記直流変換手段の出力信号の温度による変動を補正する温度特性補正手段とを含むことを特徴とする。
また、角速度の大きさに応じた角速度成分と、励振信号に基づく自己振動成分と、を含む信号を発生させる振動子と、前記信号が入力され、前記信号から前記自己振動成分を抽出する自己振動成分抽出手段と、前記自己振動成分抽出手段の出力信号を積分する積分手段を含む直流変換手段と、前記直流変換手段の出力信号の温度による変動を補正する温度特性補正手段と、を含むことを特徴としてもよい。
また、前記振動子は、検出用基部から延出している連結腕と、前記連結腕に配置された駆動用基部から前記連結腕の延出方向と交差する方向に延出している駆動振動片と、前記検出用基部から前記連結腕の延出方向と交差する方向に延出している検出振動片と、を含むことを特徴してもよい。
また、前記温度特性補正手段は、前記直流変換手段の出力信号における温度特性の1次の項に基づき、前記直流変換手段の出力信号の温度による変動を補正することを特徴としてもよい。
また、前記温度特性の1次の項を記憶する記憶手段を含み、前記温度特性補正手段は、前記記憶手段に記憶された前記温度特性の1次の項に基づき、前記直流変換手段の出力信号の温度による変動を補正することを特徴としてもよい。
また、前記温度特性補正手段の出力信号に基づいて角速度検出装置の故障の有無を判定する自己故障判定手段を含むことを特徴としてもよい。
また、前記直流変換手段は、前記積分手段の前段と後段の少なくとも一方に信号を増幅する増幅手段を含むことを特徴としてもよい。
また、前記温度特性補正手段の前段又は後段に、信号にオフセット値を加えるオフセット加算手段を含むことを特徴としてもよい。
【0015】
(9)適用例に係る故障判定システムは、
この角速度検出装置と、
前記温度特性補正手段の出力信号が入力され、前記角速度検出装置の故障の有無を判定する外部故障判定手段と、を含むことを特徴とする。
【図面の簡単な説明】
【0016】
【図1】本実施の形態に係る角速度検出装置の一例を示す回路ブロック図。
【図2】図2(A)〜図2(G)は、検出信号の角速度成分に着目した場合のタイミングチャート。
【図3】図3(A)〜図3(G)は、検出信号の自己振動成分に着目した場合のタイミングチャート。
【図4】温度と直流変換手段及び温度特性補正手段の出力信号電圧の関係の一例を示すグラフ。
【図5】温度特性補正手段の一例を示す回路図。
【図6】複数の故障判定機能を有する自己故障判定手段の一例を示す回路ブロック図。
【図7】温度特性補正手段の後段にオフセット加算手段を設けた角速度検出装置の構成例を示す回路ブロック図。
【図8】温度と直流変換手段、温度特性補正手段及びオフセット加算手段の出力信号電圧の関係の一例を示すグラフ。
【図9】オフセット加算手段の一例を示す回路図。
【図10】図10(A)及び図10(B)は、本実施の形態に係る故障判定システムの一例を示す回路ブロック図。
【図11】振動子の一例を示す平面図。
【図12】振動子の一例を示す平面図。
【図13】オフセット入力手段を有する同期検波回路の一例を示す回路図。
【発明を実施するための形態】
【0017】
以下、本発明の好適な実施形態について図面を用いて詳細に説明する。なお、以下に説明する実施の形態は、特許請求の範囲に記載された本発明の内容を不当に限定するものではない。また以下で説明される構成の全てが本発明の必須構成要件であるとは限らない。
【0018】
1.角速度検出装置
図1は、本実施の形態に係る角速度検出装置の一例を示す回路ブロック図である。
【0019】
本実施の形態に係る角速度検出装置1は、駆動回路20及び検出回路30を含む角速度検出回路5と、振動子10とを含んで構成されている。なお、駆動回路20と検出回路30は、同一基板上に構成することが可能である。
【0020】
2.振動子
振動子10は、駆動振動端子13、14から入力される駆動信号に基づいて励振振動し、励振振動した状態において、角速度運動が働くと、コリオリの力を得る。そして、振動子10は、コリオリの力に基づく角速度成分と、励振振動に基づく励振振動成分を含む検出信号を出力する。ここで、励振振動成分とコリオリ力に基づく角速度成分とは90°位相がずれている。
【0021】
次に、水晶などの圧電材料の薄板から形成される振動子10の一例を図11、図12を
用いて説明する。振動子10は、駆動用基部44から駆動振動腕11(広義には、駆動用振動片)が水晶のY軸方向に延出している。駆動用基部44は、水晶のX軸方向に延びる連結腕45を介して検出用基部49に接続されている。検出振動腕12(広義には、検出振動片)は、検出用基部49からY軸方向に延出されている。
【0022】
駆動振動腕11の側面の駆動電極41と、駆動振動腕11の上面の駆動電極42との間に交番電圧/交番電流からなる駆動信号が与えられると、圧電効果によって駆動振動腕11は、矢印Bのように屈曲振動する。ここで、図12のように振動子10が水晶のZ軸を回転軸とした回転運動をすると、駆動振動腕11は、矢印Bの屈曲振動の方向とZ軸の両方に垂直な方向にコリオリの力を得る。その結果、連結腕45は矢印Cで示すような振動をする。そして、検出振動腕12は、連結腕45の振動(矢印C)に連動して、連結腕45と矢印Dのような屈曲振動をする。
【0023】
また、駆動振動腕11の振動は、駆動用基部44と連結部45と検出用基部49とを伝わり、検出振動腕12に漏れ振動を発生させる。この漏れ振動は、コリオリの力に基づいた振動と同様に矢印Dに示す屈曲振動であるが、位相が90°ずれている。
【0024】
そして、これらの屈曲振動に基づいて、発生する逆圧電効果によって、検出振動腕の側面の検出電極47と、上面の検出電極46との間には、交番電圧/交番電流が発生する。検出振動腕の側面の検出電極47と上面の検出電極46の一方を接地端子17に接続し、もう一方を検出端子15、16に接続する。以上のようにして、検出端子15、16へ出力される検出信号は、コリオリの力に基づく角速度成分と、駆動振動の励振振動に基づく漏れ成分(自己振動成分)とが含まれる。
【0025】
図11、図12の構成では、振動子のバランスを良くするために、検出用基部49を中央に配置し、検出用基部49から+Y軸と−Y軸の両方向に検出振動腕12を延出させている。さらに、検出用基部49から+X軸と−X軸の両方向に連結腕45を延出させ、連結腕のそれぞれから、+Y軸と−Y軸の両方向に駆動振動腕11を延出させている。
【0026】
また、駆動振動腕11の先端を幅広の幅広部43にし、さらに、錘を付けることでコリオリの力を大きくしている。また、錘効果によって、所望の共振周波数を、短い振動腕で得ることができる。同様の理由で、検出振動腕12の先端を幅広の幅広部48にし、さらに、錘を付けている。
【0027】
なお、振動子10は、上述の構成に限らず、コリオリの力に基づく角速度成分と、励振振動に基づく漏れ成分とを含む検出信号を出力する振動子であれば良い。例えば、駆動振動腕と検出振動腕とを兼ねる構成であっても良く、また、駆動振動腕や検出振動腕に圧電膜を形成した構成であっても良い。
【0028】
3.角速度検出回路
角速度検出回路は、駆動回路20と検出回路30を含む。検出用振動片12には検出端子15及び16と接地端子17が設けられ、検出端子15及び16は検出回路30に接続されている。検出端子15及び16からは、互いに逆位相の検出信号が出力されるように構成されている。
【0029】
図2(A)〜図2(G)は、図1に示す回路ブロック図内の各点(A)〜(G)において、検出信号の角速度成分に着目した場合のタイミングチャートであり、図3(A)〜図3(G)は、図1に示す回路ブロック図内の各点(A)〜(G)において、検出信号の自己振動成分に着目した場合のタイミングチャートである。横軸は時間、縦軸は電圧を表す。
【0030】
駆動回路20は、駆動信号を出力して振動子10を駆動し、振動子10からフィードバック信号を受ける。これにより振動子10を励振させる。検出回路30は、駆動信号により駆動される振動子10からの検出信号を受け、検出信号からコリオリの力に基づく角速度成分を抽出する。
【0031】
本実施の形態における駆動回路20は、電流電圧変換器21、AC増幅器22、自動利得制御回路23及びコンパレータ24を含んで構成されている。
【0032】
駆動用振動片11が振動すると、圧電効果に基づく電流がフィードバック信号として駆動端子14から出力され、電流電圧変換器21に入力される。電流電圧変換器21は、駆動用振動片11の振動周波数と同一の周波数の交流電圧信号が出力する(図2(A)、図3(A))。
【0033】
電流電圧変換器21から出力された交流電圧信号は、AC増幅器22に入力される。AC増幅器は、入力される交流電圧信号を増幅する。
【0034】
AC増幅器22から出力された交流電圧信号は自動利得制御回路23に入力される。自動利得制御回路23は、入力された交流電圧信号の振幅を一定値に保持するように利得を制御し、利得制御後の交流電圧信号を駆動端子13に出力する。この駆動端子13に入力される交流電圧信号により振動子10が駆動される。
【0035】
AC増幅器22が増幅した交流電圧信号はコンパレータ24に入力され、交流電圧信号の振幅中心を基準電圧として、交流電圧信号と基準電圧信号との比較結果に応じて出力レベルを切り替える方形波電圧信号(図2(B))を、検出回路30に出力する。
【0036】
本実施の形態における検出回路30は、検出信号増幅部31、角速度成分抽出部32及び自己振動成分抽出部33を含んで構成されている。
【0037】
検出信号増幅部31は、チャージアンプ311及び312、差動増幅器313並びにAC増幅器314を含んで構成されている。
【0038】
チャージアンプ311及び312は、それぞれ検出端子15及び16に接続され、互いに逆位相の検出信号が入力される。チャージアンプ311及び312で電荷電圧変換された信号は差動増幅器313に入力される。差動増幅器313は(チャージアンプ311の出力信号)−(チャージアンプ312の出力信号)として差動増幅する。差動増幅器313の出力信号は、さらにAC増幅器314で増幅される。なお、チャージアンプ311及び312での増幅の際には信号の位相が90度進む。
【0039】
検出端子15及び16から出力される検出信号は、振動子10に働くコリオリの力に基づく角速度成分と、振動子10の励振振動に基づく自己振動成分(漏れ信号成分)を含んでいる。角速度成分抽出部32は、検出信号増幅部31の出力信号から角速度成分を抽出する。また、自己振動成分抽出部33は、検出信号増幅部31の出力信号から自己振動成分を抽出する。
【0040】
角速度成分抽出部32は、同期検波回路321、AC増幅器325、積分回路322、DC増幅器323及び出力端子324を含んで構成されている。同期検波回路321は、コンパレータ24が出力する方形波電圧信号(図2(B))を基に、検出信号増幅部31の出力信号を同期検波することにより角速度成分を抽出する。同期検波回路321で抽出された角速度成分信号は、AC増幅器325で増幅され、積分回路322で積分された後
、DC増幅器323で増幅され、出力端子324から直流電圧信号として出力される。
【0041】
自己振動成分抽出部33は、自己振動成分抽出手段331、直流変換手段332及び温度特性補正手段333を含んで構成されている。
【0042】
自己振動成分抽出手段331は、位相を90度進ませる移相器334と同期検波回路335で構成されている。自己振動成分抽出手段331は、コンパレータ24が出力する方形波電圧信号(図2(B))を移相器334により位相を90度進ませた信号を基に、検出信号増幅部31の出力信号を同期検波することにより自己振動成分を抽出する。
【0043】
直流変換手段332は、自己振動成分抽出手段331の出力信号を積分する積分手段として機能する積分回路336を含んで構成され、自己振動成分抽出手段331の出力信号を直流電圧信号に変換する。また、積分回路336の前段にAC増幅器343、積分回路336の後段にDC増幅器339を設ける。
【0044】
これらの回路の動作を、図2(A)〜図2(G)及び図3(A)〜図3(G)を用いて説明する。検出信号の角速度成分に着目した場合の動作は図2(A)〜図2(G)を用いて、検出信号の自己振動成分に着目した場合の動作は図3(A)〜図3(G)を用いて説明する。本実施の形態においては、検出端子15から出力される検出信号の角速度成分は、駆動端子14から出力されるフィードバック信号よりも位相が90度遅れた信号となるものとし、検出端子15から出力される検出信号の自己振動成分は、駆動端子14から出力されるフィードバック信号と同位相の信号となるものとする。
【0045】
まず、検出信号の角速度成分に着目した場合の動作について説明する。検出端子15から出力される検出信号の角速度成分はチャージアンプ311で電荷電圧変換される。この際、位相が90度進む。したがって、差動増幅器313及びAC増幅器314で増幅された後の信号は、図2(C)に示すように、図2(A)に示すフィードバック信号と同位相となる。
【0046】
このAC増幅器314の出力信号を、図2(B)に示すコンパレータ24の出力信号を基に同期検波回路321で同期検波すると、同期検波回路321の出力信号は図2(D)に示す全波整流波形となる。この同期検波回路321の出力信号を積分回路322で積分することにより、検出信号の角速度成分を直流電圧として検出することができる。このように、角速度成分抽出部32では検出信号の角速度成分を抽出することができる。また、積分回路322の前段のAC増幅回路や後段のDC増幅器323で信号を増幅することで、感度を調整する。
【0047】
一方、AC増幅器314の出力信号を、コンパレータ24の出力信号を移相器334で位相を90度進めた信号(図2(E))を基に同期検波回路335で同期検波すると、同期検波回路335の出力信号は図2(F)に示す波形となる。この同期検波回路335の出力信号を積分回路336で積分すると、図2(G)に示すように直流電圧は0となる。このように、自己振動成分抽出部33では検出信号の角速度成分は打ち消されることになる。
【0048】
次に、検出信号の自己振動成分に着目した場合の動作について説明する。検出端子15から出力される検出信号の自己振動成分はチャージアンプ311で電荷電圧変換される。この際、位相が90度進む。したがって、差動増幅器313及びAC増幅器314で増幅された後の信号は、図3(C)に示すように、図3(A)に示すフィードバック信号よりも位相が90度進んだ信号となる。
【0049】
このAC増幅器314の出力信号を、図3(B)に示すコンパレータ24の出力信号を基に同期検波回路321で同期検波すると、同期検波回路321の出力信号は図3(D)に示す波形となる。この同期検波回路321の出力信号を積分回路322で積分すると、直流電圧は0となる。このように、角速度成分抽出部32では検出信号の自己振動成分は打ち消されることになる。
【0050】
一方、AC増幅器314の出力信号を、図3(E)に示すコンパレータ24の出力信号を移相器334で位相を90度進めた信号を基に同期検波回路335で同期検波すると、同期検波回路335の出力信号は図3(F)に示す全波整流波形となる。この同期検波回路335の出力信号を積分回路336で積分すると、図3(G)に示すように図3(F)に示す全波整流波形の波高に比例した直流電圧となる。このように、自己振動成分抽出部33では検出信号の自己振動成分を抽出することができる。
【0051】
振動子10に故障があった場合、例えば振動子10に異物が付着したり、振動子10が破損したりした場合には、振動子10の励振振動に基づく自己振動成分の大きさが変化する。したがって、自己振動成分抽出部33で検出信号の自己振動成分を抽出し、角速度検出装置1の内部又は外部で検出信号の自己振動成分の大きさを監視することにより、振動子10に故障があるか否かを判定することができる。例えば、検出信号の自己振動成分の大きさが上限基準値を上回った場合や下限基準値を下回った場合には、振動子10に故障があるものと判定することができる。
【0052】
しかし、振動子10の励振振動に基づく自己振動成分の大きさには、振動子ごとに温度特性がある。したがって、従来の角速度検出装置では、温度特性による変動と故障による変動との判別が難しく、精度のよい故障判定は難しかった。
【0053】
本実施の形態に係る角速度検出回路5は、温度特性補正手段333を有している。温度特性補正手段333は、直流変換手段332の出力信号の温度による変動を補正する。例えば、温度特性補正手段333は、直流変換手段332の出力信号の大きさが温度によらず一定となるように補正することができる。このため、直流変換手段332の出力信号の温度による変動を打ち消すことができ、故障による変動を精度よく検出することができる。したがって、振動子の故障検出精度を高めた角速度検出回路を実現することができる。
【0054】
図4は、温度と直流変換手段332及び温度特性補正手段333の出力信号電圧の関係の一例を示すグラフである。横軸は温度、縦軸は出力信号電圧を示す。
【0055】
直流変換手段332の出力信号電圧は、図4の実線1001で示すように、温度により大きさが異なる。温度特性補正手段333は、その出力信号電圧が図4の二点破線1002で示すように温度によらず一定となる方向(例えば、図4の白抜き矢印方向)に補正して出力する。図4においては、25℃での出力信号電圧を基準にして出力信号電圧を補正する例を示している。
【0056】
また、本願の発明者は、直流変換手段332の出力信号の温度による変動は、ほぼ1次の傾きで近似できることを見出した。したがって、温度特性補正手段333は、直流変換手段332の出力信号の温度特性の1次の項に基づき、直流変換手段332の出力信号の温度による変動を補正するように構成することも可能である。
【0057】
さらに、角速度検出回路5は温度特性の1次の項を記憶する記憶手段337を含み、温度特性補正手段333は、直流変換手段332の出力信号に記憶手段337に記憶された温度特性の1次の項に基づき、直流変換手段332の出力信号の温度による変動を補正するように構成してもよい。記憶手段337は、例えばEEPROMのような不揮発性メモ
リで構成することができる。これにより、例えば角速度検出装置1の検査工程において温度特性補正手段333の出力電圧を測定し、この出力電圧が温度によらずほぼ一定の値となるような温度特性の1次の項を記憶手段337に書き込むことができる。したがって、振動子ごとに異なる温度特性を有する場合にも、適切な温度特性補正が可能になる。
【0058】
図5は、本実施の形態に係る角速度検出回路5に適用可能な温度特性補正手段333の一例を示す回路図である。図5に示す温度特性補正手段333は、演算増幅器401、制御回路402、抵抗403及び404、可変抵抗405を含んで構成されている。
【0059】
直流変換手段332の出力信号は、抵抗403を介して演算増幅器401の非反転入力端子に入力される。制御回路402は、記憶手段337に記憶された温度特性の1次の項と温度センサ406で検出される温度に基づき可変抵抗405の抵抗値を制御する。演算増幅器401は、非反転入力端子に入力された信号と反転入力端子に入力された電位を差動増幅し、出力電圧Vout1として出力する。出力電圧Vout1は、抵抗404を介して演算増幅器401の反転入力端子にもフィードバックされる。
【0060】
演算増幅器401の増幅率Aは抵抗404の抵抗値R4と可変抵抗405の抵抗値R5を用いて、A=1+R5/R4で表される。したがって、可変抵抗405の抵抗値R5を制御することにより、演算増幅器401の増幅率を制御することができる。
【0061】
このように、温度特性補正手段333を図5に示すように構成した場合には、記憶手段337に記憶される温度特性の1次の項を適切に設定することにより、出力電圧Vout1を温度によらずほぼ一定にすることができる。
【0062】
本実施の形態に係る角速度検出回路5は、さらに、温度特性補正手段333の出力信号Vout1に基づいて角速度検出装置1の故障の有無を判定する自己故障判定手段338を含んでもよい。自己故障判定手段338は、温度特性補正手段333の出力信号Vout1が上限基準値を上回った場合や下限基準値を下回った場合に、振動子10に故障があるものと判定し、判定結果に基づく出力信号を出力する。図1に示す回路ブロック図においては、出力端子341を介して角速度検出回路5の外部に出力信号を出力している。角速度検出回路5が自己故障判定手段338を含むことにより、角速度検出装置1自身が振動子10に故障があるか否かを判定することができる。
【0063】
なお、自己故障判定手段338は、他の故障判定信号に基づく故障判定機能を有していてもよい。図6は、複数の故障判定機能を有する自己故障判定手段338の一例を示す回路ブロック図である。図6に示す例では、自己故障判定手段338には、振動子10の故障の有無の判定に用いる温度特性補正手段333の出力信号Vout1の他に、駆動回路20の故障の有無の判定に用いる駆動回路診断判定信号と、検出回路30の故障の有無の判定に用いる検出回路診断判定信号が入力されるものとする。
【0064】
図6に示す自己故障判定手段338は、故障判定回路501乃至503とOR回路504を含んで構成されている。故障判定回路501乃至503は、それぞれの入力信号に基づき、故障があるものと判定した場合にはHighレベルの出力信号を、故障がないものと判定した場合にはLowレベルの出力信号を出力するものとする。
【0065】
故障判定回路501は、温度特性補正手段333の出力信号Vout1が上限基準値を上回った場合や下限基準値を下回った場合に、振動子10に故障があるものと判定し、判定結果に基づく出力信号をOR回路504に出力する。故障判定回路502は、駆動回路診断判定信号が上限基準値を上回った場合や下限基準値を下回った場合に、駆動回路20に故障があるものと判定し、判定結果に基づく出力信号をOR回路504に出力する。故
障判定回路503は、検出回路診断判定信号が上限基準値を上回った場合や下限基準値を下回った場合に、検出回路30に故障があるものと判定し、判定結果に基づく出力信号をOR回路504に出力する。
【0066】
OR回路504は、故障判定回路501乃至503のいずれかからHighレベルの出力信号が入力された場合には、Highレベルの出力信号Vout2を出力する。故障判定回路501乃至503のいずれもからLowレベルの出力信号が入力された場合には、Lowレベルの出力信号Vout2を出力する。
【0067】
このように、自己故障判定回路338を図6に示す回路ブロック図のように構成すると、角速度検出装置1のいずれかに故障があるか否かを判定し、出力信号Vout2として出力することができる。
【0068】
本実施の形態に係る角速度検出回路5の直流変換手段332は、積分手段として機能する積分回路336の前段のAC増幅器343又は後段のDC増幅器339に、信号を所望の倍率で増幅又は減衰する増幅手段を含んでもよい。図1に示す回路ブロック図においては、積分回路336の後段に設けられているDC増幅器339が増幅手段として機能する。
【0069】
振動子10の励振振動に基づく自己振動成分の大きさは、振動子10の故障モードのよって異なる。例えば振動子10が破損した場合の振動子10の励振振動に基づく自己振動成分の変動は、振動子10に異物が付着した場合の振動子10の励振振動に基づく自己振動成分の変動よりも大きい。
【0070】
積分回路336の前段のAC増幅器343又は後段のDC増幅器339を設けると、DC増幅器339の増幅率を変更することで、直流変換手段332の出力感度を変更することが可能になる。したがって、検出したい故障モードに応じてDC増幅器339の増幅率を設定することにより、所望の故障モードに対応した故障判定が可能になる。
【0071】
また、温度特性補正手段として、DC増幅器339のゲインを調整するゲイン調整回路を設けても良い。その場合、DC増幅器339の出力の温度依存が低下する。
【0072】
本実施の形態に係る角速度検出回路5は、温度特性補正手段333の出力信号Vout1を出力する出力端子340を含んでもよい。温度特性補正手段333の出力信号Vout1を角速度検出回路5の外部に出力することにより、角速度検出装置1の外部において、より詳細な故障判定が可能になる。例えば、角速度検出装置1の大きさなどの制約により角速度検出装置1の内部ではできない複雑な演算処理を、角速度検出装置1の外部に設けられたマイコンなどによって行うことにより、より詳細な故障判定が可能になる。
【0073】
また、出力端子340は、角速度検出装置1の検査工程において温度特性補正手段333の出力電圧を測定するために用いることも可能である。
【0074】
〔変形例〕
上述の角速度検出装置1の構成に加え、温度特性補正手段333の前段又は後段に、信号にオフセット値を加えるオフセット加算手段342を含んで構成することも可能である。図7は、温度特性補正手段333の後段にオフセット加算手段342を設けた角速度検出装置2の構成例を示す回路ブロック図である。なお、図1を用いて説明した角速度検出装置1と同一の構成については同一の符号を付し、その詳細な説明を省略する。
【0075】
振動子10の励振振動に基づく自己振動成分の大きさは、振動子ごとに個体差がある。
したがって、従来の角速度検出回路では、振動子に応じて判定条件を変更しなければ精度のよい故障判定は難しかった。
【0076】
本実施の形態に係る角速度検出回路6は、オフセット加算手段342を有している。オフセット加算手段342は、温度特性補正手段333の出力信号に所望のオフセット値を加える。
【0077】
図8は、温度と直流変換手段332、温度特性補正手段333及びオフセット加算手段342の出力信号電圧の関係の一例を示すグラフである。横軸は温度、縦軸は出力信号電圧を示す。
【0078】
直流変換手段332の出力信号電圧は、図8の実線2001で示すように、温度により大きさが異なる。温度特性補正手段333は、その出力信号電圧が図8の二点破線2002で示すように温度によらず一定となる方向(例えば、図8の白抜き矢印方向)に補正して出力する。図8においては、25℃での出力信号電圧を基準にして出力信号電圧を補正する例を示している。
【0079】
オフセット加算手段342は、オフセット加算手段342の出力電圧が所望の値となるようなオフセット値を温度特性補正手段333の出力信号に加えて出力する。例えば、図8の黒矢印方向にオフセット値を加算することにより、一点破線2003で示すオフセット加算手段342の出力信号電圧を所望の値に設定することができる。
【0080】
これにより、振動子10の励振振動に基づく自己振動成分の大きさの温度特性による変動を補正することに加え、振動子10の個体差による励振振動に基づく自己振動成分の大きさのばらつきを補正し、出力電圧の大きさを揃えることができる。したがって、角速度検出装置ごとに判定条件を変更することなく、振動子の故障検出精度をさらに高めた角速度検出装置を実現することができる。
【0081】
さらに、角速度検出装置2はオフセット値を記憶する記憶手段を含み、オフセット加算手段342は、温度特性補正手段333の出力信号に記憶手段337に記憶されたオフセット値を加えるように構成してもよい。記憶手段は、温度特性補正手段333で用いる温度特性の1次の項を記憶する記憶手段337と兼用する構成も可能である。これにより、例えば角速度検出装置2の検査工程においてオフセット加算手段342の出力電圧を測定し、この出力電圧が所望の値となるようなオフセット値を記憶手段337に書き込むことにより、振動子10の個体差による励振振動に基づく自己振動成分の大きさのばらつきを補正し、出力電圧の大きさを揃えることができる。
【0082】
また、温度特性補正手段として、DC増幅器339のゲインを調整するゲイン調整回路を設けても良い。その場合、DC増幅器339の出力の温度依存が低下する。
【0083】
図9は、本実施の形態に係る角速度検出装置2に適用可能なオフセット加算手段342の一例を示す回路図である。図9に示すオフセット加算手段342は、演算増幅器601、D/Aコンバータ602、抵抗603乃至605を含んで構成されている。
【0084】
温度特性補正手段333の出力信号は、抵抗603を介して演算増幅器601の非反転入力端子に入力される。D/Aコンバータ602は、記憶手段337に記憶されたオフセット値に基づき電圧信号を出力する。D/Aコンバータ602が出力した電圧信号は、抵抗604を介して演算増幅器401の反転入力端子に入力される。演算増幅器601は、非反転入力端子に入力された信号と反転入力端子に入力された信号を差動増幅し、出力電圧Vout3として出力する。出力電圧Vout3は、抵抗605を介して演算増幅器6
01の反転入力端子にもフィードバックされる。
【0085】
このように、オフセット加算手段342を図9に示すように構成した場合には、記憶手段337に記憶されるオフセット値を適切に設定することにより、出力電圧Vout3を所望の値に設定することができる。
【0086】
また、同期検波回路335として、図13に示すような、同期検波回路335(自己振動抽出手段331)の出力信号にオフセット値を加えるオフセット入力手段を有する同期検波回路を用いても良い。被同期検波信号信号(C)は、分岐して、一方は、反転せずに非反転信号としてスイッチ359に入力され、もう一方は反転アンプ357によって反転して、スイッチ358に入力される。基準信号によって、スイッチ358、359が交互に接続されることで、非反転信号と、反転信号が交互に出力されることによって同期検波信号(F)が出力される。また、オフセット入力端子351からオフセット信号が反転信号に重畳される。その結果、スイッチ358、359が被同期信号の反転信号を選択して出力するタイミングにおいて、オフセット信号が同期検波信号(F)に重畳され、スイッチ358、359が被同期信号の非反転信号を選択して出力するタイミングにおいて、オフセット信号が同期検波信号(F)に重畳されない。このようにして、オフセット信号は重畳/非重畳を繰り返すが、後段の積分回路336において平滑化され、一定レベルのオフセット値を得ることになる。なお、オフセット信号を非反転信号に重畳する構成にすることも可能である。
【0087】
また、同様に、角速度検出部32の同期検波回路321にオフセット信号入力手段を有する同期検波回路を用いても良い。
【0088】
4.故障判定システム
図10(A)及び図10(B)は、本実施の形態に係る故障判定システムの一例を示す回路ブロック図である。
【0089】
図10(A)に示す本実施の形態に係る故障判定システム3は、角速度検出装置1を含む。なお、角速度検出装置1の構成及び動作は図1乃至図6を用いて説明した通りであるため、同一の構成には同一の符号を付し、その詳細な説明を省略する。
【0090】
本実施の形態に係る故障判定システム3は、角速度検出装置1の出力端子340からの出力信号Vout1に基づいて角速度検出装置1の故障の有無を判定する外部故障判定手段700を含む。外部故障判定手段700は、例えばマイコンにより構成することが可能である。
【0091】
外部故障判定手段700は、例えば、角速度検出装置1の出力信号Vout1が上限基準値を上回った場合や下限基準値を下回った場合に、角速度検出装置1の振動子10に故障があるものと判定することができる。また例えば、外部故障判定手段700は、角速度検出装置1の大きさなどの制約により角速度検出装置1の内部ではできない複雑な演算処理を行うことにより、より詳細な故障判定を行うこともできる。
【0092】
〔変形例〕
上述の故障判定システム3の角速度検出装置1を角速度検出装置2に置き換えて構成することも可能である。図10(B)に示す本実施の形態に係る故障判定システム4は、角速度検出装置2を含む。なお、角速度検出装置2の構成及び動作は図1乃至図9を用いて説明した通りであるため、同一の構成には同一の符号を付し、その詳細な説明を省略する。
【0093】
本実施の形態に係る故障判定システム4において、外部故障判定手段は、角速度検出装置2の出力端子340からの出力信号Vout3に基づいて角速度検出装置2の故障の有無を判定する。
【0094】
故障判定システム4は、角速度検出装置1に代えて角速度検出装置2を用いることにより、より精度よく故障判定を行うことができる。
【0095】
なお、本発明は本実施形態に限定されず、本発明の要旨の範囲内で種々の変形実施が可能である。
【0096】
本発明は、実施の形態で説明した構成と実質的に同一の構成(例えば、機能、方法及び結果が同一の構成、あるいは目的及び効果が同一の構成)を含む。また、本発明は、実施の形態で説明した構成の本質的でない部分を置き換えた構成を含む。また、本発明は、実施の形態で説明した構成と同一の作用効果を奏する構成又は同一の目的を達成することができる構成を含む。また、本発明は、実施の形態で説明した構成に公知技術を付加した構成を含む。
【符号の説明】
【0097】
1,2 角速度検出装置、3,4 故障判定システム、5,6 角速度検出回路、10 振動子、11 駆動用振動片(駆動振動腕)、12 検出用振動片(検出振動腕)、13,14 駆動端子、15,16 検出端子、17 接地端子、20 駆動回路、21 電流電圧変換器、22 AC増幅器、23 自動利得制御回路、24 コンパレータ、41,42 駆動電極、43,48 幅広部、44 駆動用基部、45 連結腕、46,47
検出電極、49 検出用基部、30 検出回路、31 検出信号増幅部、32 角速度信号抽出部、33 自己振動成分抽出部、311,312 チャージアンプ、313 差動増幅器、314 AC増幅器、321 同期検波回路、322 積分回路、323 DC増幅器、324 出力端子、331 自己振動成分抽出手段、332 直流変換手段、333 温度特性補正手段、334 移相器、335 同期検波回路、336 積分回路、337 記憶手段、338 自己故障判定手段、339 DC増幅器、340,341
出力端子、342 オフセット加算手段、343 AC増幅器、351 オフセット入力端子、357 反転アンプ、358,359 スイッチ、401 演算増幅器、402
制御回路、403,404 抵抗、405 可変抵抗、406 温度センサ、501,502,503 故障判定回路、504 OR回路、601 演算増幅器、602 D/Aコンバータ、603,604,605 抵抗、700 外部故障判定手段
【特許請求の範囲】
【請求項1】
振動子から、角速度の大きさに応じた第1成分と、励振振動に基づく第2成分と、を含む信号が入力され、前記信号から前記第2成分を抽出する自己振動成分抽出手段と、
前記自己振動成分抽出手段の出力信号の温度による変動を補正する温度特性補正手段と、を含むことを特徴とする角速度検出装置用回路。
【請求項2】
請求項1において、
前記振動子は、検出用基部から延出している連結腕と、前記連結腕に配置された駆動用基部から前記連結腕の延出方向と交差する方向に延出している駆動振動片と、前記検出用基部から前記連結腕の延出方向と交差する方向に延出している検出振動片と、を含むことを特徴とする角速度検出装置用回路。
【請求項3】
請求項1または2において、
前記温度特性補正手段は、前記自己振動成分抽出手段の出力信号における温度特性の1次の項に基づき、前記自己振動成分抽出手段の出力信号の温度による変動を補正することを特徴とする角速度検出装置用回路。
【請求項4】
請求項3において、
前記温度特性の1次の項を記憶する記憶手段を含み、
前記温度特性補正手段は、前記記憶手段に記憶された前記温度特性の1次の項に基づき、前記自己振動成分抽出手段の出力信号の温度による変動を補正することを特徴とする角速度検出装置用回路。
【請求項5】
請求項1乃至4のいずれか一項において、
前記温度特性補正手段の出力信号を監視し判定する判定手段を含むことを特徴とする角速度検出装置用回路。
【請求項6】
請求項1乃至5のいずれか一項において、
前記自己振動抽出手段の前段と後段の少なくとも一方に信号を増幅する増幅手段を含むことを特徴とする角速度検出装置用回路。
【請求項7】
請求項1乃至6のいずれか一項において、
前記温度特性補正手段の前段又は後段に、信号にオフセット値を加えるオフセット加算手段を含むことを特徴とする角速度検出装置用回路。
【請求項8】
角速度の大きさに応じた第1成分と、励振信号に基づく第2成分と、を含む信号を発生させる振動子と、
前記信号が入力され、前記信号から前記第2成分を抽出する自己振動成分抽出手段と、
前記自己振動成分抽出手段の出力信号の温度による変動を補正する温度特性補正手段と、を含むことを特徴とする角速度検出装置。
【請求項9】
請求項8において、
前記振動子は、検出用基部から延出している連結腕と、前記連結腕に配置された駆動用基部から前記連結腕の延出方向と交差する方向に延出している駆動振動片と、前記検出用基部から前記連結腕の延出方向と交差する方向に延出している検出振動片と、を含むことを特徴とする角速度検出装置。
【請求項10】
請求項8または9において、
前記温度特性補正手段は、前記自己振動成分抽出手段の出力信号における温度特性の1
次の項に基づき、前記自己振動成分抽出手段の出力信号の温度による変動を補正することを特徴とする角速度検出装置。
【請求項11】
請求項10において、
前記温度特性の1次の項を記憶する記憶手段を含み、
前記温度特性補正手段は、前記記憶手段に記憶された前記温度特性の1次の項に基づき、前記自己振動成分抽出手段の出力信号の温度による変動を補正することを特徴とする角速度検出装置。
【請求項12】
請求項8乃至11のいずれか一項において、
前記温度特性補正手段の出力信号を監視し判定する判定手段を含むことを特徴とする角速度検出装置。
【請求項13】
請求項8乃至12のいずれか一項において、
前記自己振動成分抽出手段の前段と後段の少なくとも一方に信号を増幅する増幅手段を含むことを特徴とする角速度検出装置。
【請求項14】
請求項8乃至13のいずれか一項において、
前記温度特性補正手段の前段又は後段に、信号にオフセット値を加えるオフセット加算手段を含むことを特徴とする角速度検出装置。
【請求項15】
請求項8乃至14のいずれか一項に記載の角速度検出装置と、
前記温度特性補正手段の出力信号が入力され、前記角速度検出装置の故障の有無を判定する外部故障判定手段と、を含むことを特徴とする故障判定システム。
【請求項1】
振動子から、角速度の大きさに応じた第1成分と、励振振動に基づく第2成分と、を含む信号が入力され、前記信号から前記第2成分を抽出する自己振動成分抽出手段と、
前記自己振動成分抽出手段の出力信号の温度による変動を補正する温度特性補正手段と、を含むことを特徴とする角速度検出装置用回路。
【請求項2】
請求項1において、
前記振動子は、検出用基部から延出している連結腕と、前記連結腕に配置された駆動用基部から前記連結腕の延出方向と交差する方向に延出している駆動振動片と、前記検出用基部から前記連結腕の延出方向と交差する方向に延出している検出振動片と、を含むことを特徴とする角速度検出装置用回路。
【請求項3】
請求項1または2において、
前記温度特性補正手段は、前記自己振動成分抽出手段の出力信号における温度特性の1次の項に基づき、前記自己振動成分抽出手段の出力信号の温度による変動を補正することを特徴とする角速度検出装置用回路。
【請求項4】
請求項3において、
前記温度特性の1次の項を記憶する記憶手段を含み、
前記温度特性補正手段は、前記記憶手段に記憶された前記温度特性の1次の項に基づき、前記自己振動成分抽出手段の出力信号の温度による変動を補正することを特徴とする角速度検出装置用回路。
【請求項5】
請求項1乃至4のいずれか一項において、
前記温度特性補正手段の出力信号を監視し判定する判定手段を含むことを特徴とする角速度検出装置用回路。
【請求項6】
請求項1乃至5のいずれか一項において、
前記自己振動抽出手段の前段と後段の少なくとも一方に信号を増幅する増幅手段を含むことを特徴とする角速度検出装置用回路。
【請求項7】
請求項1乃至6のいずれか一項において、
前記温度特性補正手段の前段又は後段に、信号にオフセット値を加えるオフセット加算手段を含むことを特徴とする角速度検出装置用回路。
【請求項8】
角速度の大きさに応じた第1成分と、励振信号に基づく第2成分と、を含む信号を発生させる振動子と、
前記信号が入力され、前記信号から前記第2成分を抽出する自己振動成分抽出手段と、
前記自己振動成分抽出手段の出力信号の温度による変動を補正する温度特性補正手段と、を含むことを特徴とする角速度検出装置。
【請求項9】
請求項8において、
前記振動子は、検出用基部から延出している連結腕と、前記連結腕に配置された駆動用基部から前記連結腕の延出方向と交差する方向に延出している駆動振動片と、前記検出用基部から前記連結腕の延出方向と交差する方向に延出している検出振動片と、を含むことを特徴とする角速度検出装置。
【請求項10】
請求項8または9において、
前記温度特性補正手段は、前記自己振動成分抽出手段の出力信号における温度特性の1
次の項に基づき、前記自己振動成分抽出手段の出力信号の温度による変動を補正することを特徴とする角速度検出装置。
【請求項11】
請求項10において、
前記温度特性の1次の項を記憶する記憶手段を含み、
前記温度特性補正手段は、前記記憶手段に記憶された前記温度特性の1次の項に基づき、前記自己振動成分抽出手段の出力信号の温度による変動を補正することを特徴とする角速度検出装置。
【請求項12】
請求項8乃至11のいずれか一項において、
前記温度特性補正手段の出力信号を監視し判定する判定手段を含むことを特徴とする角速度検出装置。
【請求項13】
請求項8乃至12のいずれか一項において、
前記自己振動成分抽出手段の前段と後段の少なくとも一方に信号を増幅する増幅手段を含むことを特徴とする角速度検出装置。
【請求項14】
請求項8乃至13のいずれか一項において、
前記温度特性補正手段の前段又は後段に、信号にオフセット値を加えるオフセット加算手段を含むことを特徴とする角速度検出装置。
【請求項15】
請求項8乃至14のいずれか一項に記載の角速度検出装置と、
前記温度特性補正手段の出力信号が入力され、前記角速度検出装置の故障の有無を判定する外部故障判定手段と、を含むことを特徴とする故障判定システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2013−68629(P2013−68629A)
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願番号】特願2012−269478(P2012−269478)
【出願日】平成24年12月10日(2012.12.10)
【分割の表示】特願2008−186137(P2008−186137)の分割
【原出願日】平成20年7月17日(2008.7.17)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願日】平成24年12月10日(2012.12.10)
【分割の表示】特願2008−186137(P2008−186137)の分割
【原出願日】平成20年7月17日(2008.7.17)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
[ Back to top ]