
角速度検出装置
【課題】本発明は、振動子から検出した信号に含まれる不正振動ノイズの影響を抑え、予め定められた値以上のSN比を確保して歩留まりを改善することができる角速度検出装置を提供する。
【解決手段】本発明は、コリオリ力に応じた電気信号SR,SLと、コリオリ力に応じて変化しない基準信号FBとを検出することが可能な振動子と、振動子を駆動する駆動回路2と、振動子から検出した電気信号SR,SLに対して予め定められた処理を行ない角速度を検出する検出回路1とを備える角速度検出装置である。検出回路1は、振動子から検出した電気信号SR,SLと基準信号FBとの差分演算を行ない、電気信号SR,SLから振動子に生じている不正振動によるノイズを除去する駆動ノイズキャンセル回路12を有している。
【解決手段】本発明は、コリオリ力に応じた電気信号SR,SLと、コリオリ力に応じて変化しない基準信号FBとを検出することが可能な振動子と、振動子を駆動する駆動回路2と、振動子から検出した電気信号SR,SLに対して予め定められた処理を行ない角速度を検出する検出回路1とを備える角速度検出装置である。検出回路1は、振動子から検出した電気信号SR,SLと基準信号FBとの差分演算を行ない、電気信号SR,SLから振動子に生じている不正振動によるノイズを除去する駆動ノイズキャンセル回路12を有している。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、角速度検出装置に関し、振動子を用いて角速度を検出する角速度検出装置に関する。
【背景技術】
【0002】
角速度検出装置は、ジャイロセンサとも呼ばれ、撮像手段の手振れ検出やカーナビゲーションの方向検出に利用されている。角速度検出装置は、近年さらに需要が様々な分野に拡大すると共に、小型化、高性能化などの要求がなされている。
【0003】
このような小型化の要求のため、角速度検出装置は、角速度を検出する振動子と、振動子からの信号を処理する電子回路とを1つのパッケージとして形成される。特許文献1に開示してある角速度検出装置は、支持基板に、振動子と、振動子を制御する半導体部品と、振動子と半導体部品を電気的に接続する回路部品とを形成してある。さらに、特許文献1に開示してある角速度検出装置は、振動子、半導体部品および回路部品を形成した支持基板の一面を覆う蓋体を有している。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2011−133486号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に開示してある角速度検出装置などに用いる振動子には、1つの半導体ウェハに複数個同時に形成し、個々切出して製造する場合がある。その場合、振動子は、製造プロセスのバラツキにより、半導体ウェハのどの位置から切出されたかによって、不正振動によるノイズ(以下、不正振動ノイズともいう)の位相や振幅が異なる。たとえば、不正振動ノイズは、半導体ウェハの中心部から切出した振動子の方が、外周から切出した振動子の方より振幅が小さくなる。また、たとえば、不正振動ノイズは、半導体ウェハの中心部を挟んで対称となる位置から切出した振動子で、位相が反転する。ここで、振動子に発生する不正振動ノイズは、振動子に角速度を加わらない状態でも検出されるノイズ信号である。
【0006】
また、角速度検出装置において重要視される評価特性の1つにSN比がある。このSN比が予め定められた値未満となった場合、不良品として判定されるため、歩留まりを改善するためには、SN比が予め定められた値以上にしなければならない。角速度検出装置のSN比を上げるためには、信号成分Sを上げるか、ノイズ成分Nを下げる必要がある。特に、ノイズ成分Nを下げる場合、振動子から検出した信号から取出したい信号(コリオリ信号)のみを増幅して取出せる信号検出回路が必要となる。
【0007】
しかし、信号検出回路は、検出した信号に不正振動ノイズが含まれていると、回路前段において当該不正振動ノイズも一緒に増幅するため、取出したい信号(コリオリ信号)を十分に増幅することができない。そのため、角速度検出装置は、予め定められた値以上のSN比を確保することができず歩留まりを改善することができないという問題があった。
【0008】
それゆえに、本発明は、上記問題点を解決するためになされたものであり、振動子から検出した信号に含まれる不正振動ノイズの影響を抑え、予め定められた値以上のSN比を確保して歩留まりを改善することができる角速度検出装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明に係る角速度検出装置は、コリオリ力に応じた電気信号と、コリオリ力に応じて変化しない基準信号とを検出することが可能な振動子と、振動子を駆動する駆動回路と、振動子から検出した電気信号に対して予め定められた処理を行ない角速度を検出する検出回路とを備える角速度検出装置であって、検出回路は、振動子から検出した電気信号と基準信号との差分演算を行ない、電気信号から振動子に生じている不正振動によるノイズを除去する駆動ノイズキャンセル回路を有している。
【0010】
好ましくは、駆動ノイズキャンセル回路は、電気信号の位相に対して基準信号の位相を調整する位相調整部と、電気信号と基準信号との差分が小さくなるように、電気信号または基準信号のうち少なくとも一方の振幅を調整する振幅調整部とを有する。
【0011】
好ましくは、位相調整部は、電気信号の位相に対する基準信号の位相をモニタするための第1パッド電極と、第1パッド電極でモニタした電気信号の位相に対する基準信号の位相の差に基づき、基準信号の位相を調整する位相遅延部と有し、振幅調整部は、電気信号の振幅に対する基準信号の振幅をモニタするための第2パッド電極と、第2パッド電極でモニタした電気信号と基準信号との差分に基づき、電気信号または基準信号のうち少なくとも一方の振幅を調整する振幅増幅部と有する。
【0012】
好ましくは、振動子は、音叉型振動子であり、半導体基板に形成される基部と、基部から延設され第1の幅を有する第1幅広部と、第1幅広部と並行して設けられ基部から延設される第2幅広部と、第1幅広部から延設し第1の幅よりも小さな第2の幅を有する第1幅狭部と、第2幅広部から延設し第2の幅を有する第2幅狭部とを有し、第1幅広部および第2幅広部を振動させるための駆動信号を印加する駆動電極を第1幅広部および第2幅広部に形成し、第1幅広部に形成された強誘電体層に生じるコリオリ力に応じた電気信号を検出する第1の検出電極を第1幅広部に形成し、第2幅広部に形成された強誘電体層に生じるコリオリ力に応じた電気信号を検出する第2の検出電極を第2幅広部に形成し、コリオリ力に応じて変化しない基準信号を検出するモニタ電極を第1幅狭部および第2幅狭部のうち少なくとも一方に形成する。
【0013】
好ましくは、位相調整部は、モニタ電極で検出した基準信号の位相を反転させた反転基準信号を生成する位相反転部と、第1の検出電極で検出した電気信号に対する差分演算の相手を、基準信号または反転基準信号の一方に切替え、第2の検出電極で検出した電気信号に対する差分演算の相手を、基準信号または反転基準信号の他方に切替える切替部とを有する。
【0014】
好ましくは、振動子は、片持ち梁型振動子であり、半導体基板に形成される基部と、基部から延設され第1の幅を有する幅広部と、幅広部から延設され第1の幅よりも幅が小さな第2の幅を有する幅狭部とを有し、幅広部を振動させるための駆動信号を印加する駆動電極を幅広部に形成し、幅広部に形成された強誘電体層に生じるコリオリ力に応じた電気信号を検出する検出電極を幅広部に形成し、コリオリ力に応じて変化しない基準信号を検出するモニタ電極を幅狭部に形成する。
【0015】
好ましくは、駆動回路は、基準信号を入力信号とするPLL回路を備え、PLL回路に、スイッチトキャパシタフィルタで構成したループフィルタを用いる。
【発明の効果】
【0016】
本発明に係る角速度検出装置は、振動子から検出した電気信号と基準信号との差分演算を行ない、電気信号から振動子に生じている不正振動によるノイズ(不正振動ノイズ)を除去するので、振動子から検出した電気信号に含まれる不正振動ノイズの影響を抑え、予め定められた値以上のSN比を確保して歩留まりを改善することができる。
【図面の簡単な説明】
【0017】
【図1】本発明の実施の形態に係る角速度検出装置の振動子の構成を示す平面図である。
【図2】図1に示す振動子の切断線に沿った断面図を示す。
【図3】図1に示す振動子の各駆動電極に供給する電圧を模式的に示した波形図である。
【図4】図1に示す振動子の各検出電極および各モニタ電極から得られる信号を模式的に示した波形図である。
【図5】本発明の実施の形態に係る角速度検出装置の駆動回路および検出回路の構成を示すブロック図を示す。
【図6】本発明の実施の形態に係る角速度検出装置の駆動ノイズキャンセル回路の構成を示すブロック図である。
【図7】本発明の実施の形態に係る角速度検出装置に用いるPLL回路の構成を示すブロック図である。
【図8】ラグ・リード型のループフィルタの構成を示す回路図である。
【図9】本発明の実施の形態に係るPLL回路のループフィルタの構成を示すブロック図および出力特性を示すグラフである。
【図10】ループフィルタを構成する回路を示す回路図である。
【図11】スイッチトキャパシタフィルタで構成したループフィルタと、ラグ・リード型のループフィルタとの周波数に対するゲインおよび位相の変化を示すグラフである。
【発明を実施するための形態】
【0018】
以下、本発明に係る実施の形態について図面を参照して説明する。
(実施の形態)
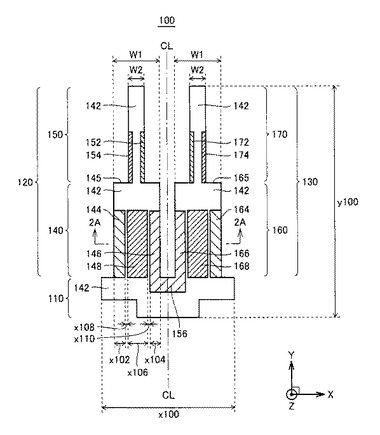
図1は、本発明の実施の形態に係る角速度検出装置の振動子の構成を示す平面図である。図1にはX方向、Y方向、およびZ方向を示す記号が併記されている。なお、X方向は、振動子100の幅方向に相当し、Y方向は、振動子100の長さ方向に相当する。また、Z方向は、振動子100の高さ方向に対応し、紙面の奥側から手前側に向かう方向である。
【0019】
本発明の実施の形態に係る角速度検出装置は、振動子100の他に、振動子100を駆動する自励発振回路、および振動子100からの検出出力に基づいて角速度信号を処理する信号処理回路などを備えるが、説明の便宜上これらの回路は図示していない。また、振動子100は、音叉型振動子である。
【0020】
振動子100は、圧電体142が形成されたT字状の基部110を有する。基部110は振動子100が作り込まれる図示しない半導体基板の一部で固定されている。基部110の頂部から第1振動腕120と第2振動腕130が並行して設けられる。圧電体142は、基部110だけではなく、第1振動腕120、および第2振動腕130の一主面を覆って設けられている。第1振動腕120と第2振動腕130の形状および大きさはほぼ同じである。2つの振動腕は中心線CL−CLを境にして互いに線対称になるよう形成されている。
【0021】
第1振動腕120は細長い短冊状の第1幅広部140と、これよりも幅の細い短冊状の第1幅狭部150を有し、これらはそれぞれの長手方向が連なるように連続して形成されている。第1幅広部140の一部であって、これと第1幅狭部150との境界部145の近傍には比較的広い面積の圧電体142が露呈している。なお、圧電体142は基部110、第1振動腕120、および第2振動腕130の一主面上に連続して設けられる。すなわち、第1振動腕120と第2振動腕130は圧電体142を共有する。
【0022】
第2振動腕130は第1振動腕120とほぼ同形状を成す。すなわち、第2振動腕130は、細長いいわゆる短冊状の第2幅広部160と、これよりも幅の細い短冊状の第2幅狭部170とが互いの長手方向が連なるように連続して形成されている。第2幅広部160の一部であって、これと第2幅狭部170との境界部165の近傍には比較的広い面積の圧電体142が露呈している。
【0023】
第1振動腕120の第1幅広部140には、電気信号を入力するための第1駆動電極144、第2駆動電極146、および電気信号を出力するための第1検出電極148が各別に形成される。第1幅狭部150にはモニタ電極152,154が第1幅広部140と第1幅狭部150の境界部145から第1幅狭部150の長手方向に沿って延びるように形成されている。なお、モニタ電極152,154は第1幅狭部150の長手方向のほぼ中央部まで設けたものを図示したが、中央部よりもさらに先端側まで延設してもよい。いずれにしてもモニタ電極152,154の長手方向の長さは、境界部145から第1幅狭部150の長手方向に沿って随時設定すればよい。また、モニタ電極152,154は、第1幅狭部150に設けるだけでなく、第1幅狭部150の一部から境界部145を越えて第1幅広部140の一部に延設させてもよい。
【0024】
第2振動腕130の第2幅広部160には、電気信号を入力するための第3駆動電極164、第4駆動電極166、および電気信号を出力するための第2検出電極168が各別に形成される。これらの各電極は第1振動腕120の第1幅広部140に形成された各駆動電極、検出電極のものとほぼ同じ形状であり、かつ、それらの大きさもほぼ同じである。なお、第4駆動電極166は基部110側第2駆動電極146と共通に接続され共通駆動電極156を成している。
【0025】
第2幅狭部170にはモニタ電極172,174が、第2幅広部160と第2幅狭部170の境界部165から第2幅狭部170の長手方向に沿って延びるように形成される。なお、モニタ電極172,174は第2幅狭部170の長手方向のほぼ中央部まで設けたものを図示したが、中央部よりもさらに先端側まで延設してもよく、長手方向の中央部までは設けずに境界部165から第2幅狭部170の長手方向にわずかに延びるように配設してもかまわない。いずれにしてもモニタ電極172,174の長手方向の長さは、境界部165から第2幅狭部170の長手方向に沿って随時設定すればよい。また、モニタ電極172およびモニタ電極174は、第2幅狭部170の一部から境界部165を越えて第2幅広部160の一部に延設させるようにしてもかまわない。
【0026】
第1幅狭部150および第2幅狭部170に設けた各モニタ電極152,154,172,174には振動子100の振動状態に応じた電気信号が取出され、該電気信号は図示しない自励発振回路にフィードバックされる。モニタ電極152,154,172,174は角速度検出装置の振動子、すなわち、第1振動腕120および第2振動腕130のX方向、すなわち幅方向の共振周波数をモニタリングするために用意されている。モニタ電極172から取出した電気信号は図示しないバンドパスフィルタを介して増幅され、第4駆動電極166に帰還され、モニタ電極174から取出した電気信号は図示しないバンドパスフィルタを介して増幅され、第3駆動電極164に帰還される。同様にモニタ電極152から取出した電気信号は図示しないバンドパスフィルタを介して増幅され、第2駆動電極146に帰還され、モニタ電極154から取出した電気信号は図示しないバンドパスフィルタを介して増幅され、第1駆動電極144に帰還される。バンドパスフィルタでは電気信号が最も大きくなる周波数成分が取出される。仮にモニタ電極152,154,172,174を用意しなければ、第1振動腕120および第2振動腕130を所期の共振周波数で振動させることが期待できなくなる。第1検出電極148および第2検出電極168は振動子100のコリオリ力による振動変位を検出する。
【0027】
図1に示した振動子100は、幅x100、長さy100の大きさで示されている。幅x100の大きさはたとえば60μmであり、長さy100の大きさはたとえば500μm〜600μmである。したがって、長さy100は幅x100のほぼ10倍の大きさである。また、第1幅広部140および第2幅広部160の幅W1の大きさは、共に等しくたとえば24μmであり、第1幅狭部150および第2幅狭部170の幅W2の大きさは共に等しくたとえば10μmにそれぞれ設定される。
【0028】
第1駆動電極144および第3駆動電極164の幅は共に等しく幅x102で示される。幅x102の大きさは、たとえば2μmである。第2駆動電極146および第4駆動電極166の幅は共に等しく幅x104で示される。幅x104の大きさは、幅x102と等しいたとえば2μmである。
【0029】
第1幅広部140に設けられた第1検出電極148、および第2幅広部160に設けられた第2検出電極168の幅は共に等しく幅x106で示される。幅x106の大きさはたとえば16μmである。また第1駆動電極144と第1検出電極148との離間距離および、第3駆動電極164と第2検出電極168との離間距離x108は共に等しくたとえば1μmである。また第1検出電極148と第2駆動電極146との離間距離、および第2検出電極168と第4駆動電極166との離間距離x110は共に等しくたとえば1μmである。
【0030】
図1に示したものは振動腕を2つ有する振動子100、すなわち、音叉型振動子であった。しかし、本発明にかかる技術的思想は振動腕が1つのもの、すなわち、片持ち梁型振動子にも適用することもできる。したがって、本発明にかかる角速度検出装置を片持ち梁型振動子に適用する場合には第1振動腕120又は第2振動腕130のいずれか1つの構成要素を用意すれば足りる。
【0031】
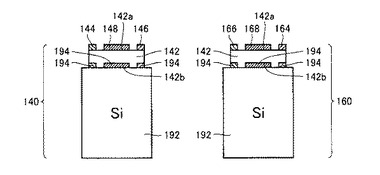
図2は、図1に示す振動子100の切断線2A−2Aに沿った断面図を示す。図2に示す断面図は、第1幅広部140および第2幅広部160の断面図である。第1幅広部140および第2幅広部160には圧電体142が形成される。圧電体142の厚みはたとえば1.0μmである。第1幅広部140における圧電体142の第1主面142aには、紙面左側からみて第1駆動電極144、第1検出電極148、および第2駆動電極146がこの順序で所定の間隔を保って形成される。同様に、第2幅広部160における圧電体142の第1主面142aには、紙面右側からみて第3駆動電極164、第2検出電極168、および第4駆動電極166がこの順序で所定の間隔を保って形成される。これらの各電極の厚みは共に等しい。なお、図示していないが、これらの各電極上にはシリコン酸化物、たとえば二酸化シリコン膜(SiO2)からなる堆積膜を形成してもよい。
【0032】
圧電体142の第2主面142bには下部電極194、半導体基板196がこの順序で形成されている。下部電極194は、第1駆動電極144、第1検出電極148、および第2駆動電極146のそれぞれに対向して個別に形成されているが、圧電体142の第2主面142bに一体として形成してもよい。同様に、下部電極194は、第3駆動電極164、第2検出電極168、および第4駆動電極166のそれぞれに対向して個別に形成されているが、圧電体142の第2主面142bに一体として形成してもよい。
【0033】
下部電極194、圧電体142、および第4駆動電極166(第3駆動電極164)までの厚みはたとえば約1.4μmである。なお、圧電体142の第1主面142aに設けられた第3駆動電極164、第4駆動電極166、および第2検出電極168は共に同じ厚みで形成される。また下部電極194の厚みは、第3駆動電極164、第4駆動電極166、および第2検出電極168のそれらと同じ厚みで形成される。なお、第1振動腕120に形成される各駆動電極、各検出電極の厚みも第2振動腕130側と同じ大きさである。
【0034】
ここで、下部電極194には、たとえば白金(Pt)/チタン(Ti)の積層膜などを用いることが可能であり、上部電極である第1駆動電極144(第2駆動電極146、第1検出電極148、第3駆動電極164、第4駆動電極166、および第2検出電極168)には、たとえば酸化イリジウム(IrO2)/イリジウム(Ir)の積層膜や金(Au)膜などを用いることが可能である。圧電体142は、強誘電体層であり、たとえばチタン酸ジルコン酸鉛(PZT)膜やランタンドープジルコン酸チタン酸鉛(PLZT)膜などを用いることが可能である。なお、PZT層やPLZT層はゾルゲル法等により形成される。
【0035】
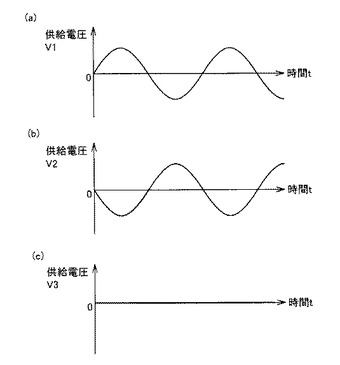
図3は、図1に示す振動子100の各駆動電極に供給する電圧を模式的に示した波形図である。図3(a)に示す供給電圧V1は、所定の振幅に設定され第1駆動電極144および第3駆動電極164に供給する交流電圧を示す。図3(b)に示す供給電圧V2は、第2駆動電極146および第4駆動電極166、すなわち、共通駆動電極156に供給する交流電圧を示す。供給電圧V1とV2の振幅はほぼ等しく、かつ位相は互いに180度ずれた、いわゆる位相反転の関係にある。図3(c)に示す供給電圧V3は、下部電極194に供給される直流電圧を示す。供給電圧V3は例えば0ボルトに設定される。
【0036】
ここで、図2に示す圧電体142であって、第1駆動電極144と下部電極194とに挟まれる部分には、第1駆動電極144に供給される供給電圧V1と下部電極194に供給される供給電圧V3による電位差が生じる。すなわち、圧電体142であって第1駆動電極144と下部電極194とに挟まれる部分には電位が(V1−V3)である電圧Vs1が印加されることになる。電圧Vs1が印加される圧電体142の該部分は電圧Vs1により圧縮・伸長変形し、第1伸縮運動を行う。
【0037】
一方、圧電体142であって、第2駆動電極146と下部電極194とに挟まれる部分には、第2駆動電極146に供給される供給電圧V2と下部電極194に供給される供給電圧V3による電位差が生じる。すなわち、圧電体142であって第2駆動電極146と下部電極194とに挟まれる部分には電位が(V2−V3)である電圧Vs2が印加されることになる。したがって電圧Vs2が印加される圧電体142の該部分は電圧Vs2により伸長・圧縮変形し、上記第1伸縮運動とは逆位相の第2伸縮運動を行う。
【0038】
第1伸縮運動および第2伸縮運動により振動子100の第1幅広部140(第2幅広部160)はX方向に互いに離間および互いに接近する方向、すなわち、横方向の横振動を行う。
【0039】
第1幅広部140(第2幅広部160)が横振動することにより第1幅狭部150(第2幅狭部170)も該横振動と同周期で振動する。ここで、第1幅狭部150(第2幅狭部170)に設けられたモニタ電極152(モニタ電極172)により、第1幅狭部150(第2幅狭部170)が該横振動をすることにより発生する電気信号を取出し、図示しない自励発振回路を介して第2駆動電極146(第4駆動電極166)に供給する。
【0040】
さらに、第1幅狭部150(第2幅狭部170)に設けられたモニタ電極154(モニタ電極174)により、第1幅狭部150(第2幅狭部170)が該横振動をすることにより発生する電気信号を取出し、図示しない自励発振回路を介して第1駆動電極144(第3駆動電極164)に供給する。
【0041】
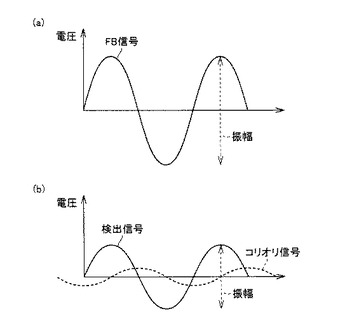
次に、図3に示す電圧を振動子100の各駆動電極に供給した場合に、第1検出電極148、第2検出電極168、モニタ電極152,154およびモニタ電極172,174から得られる信号について説明する。図4は、図1に示す振動子100の各検出電極および各モニタ電極から得られる信号を模式的に示した波形図である。モニタ電極152,154およびモニタ電極172,174は、図4(a)に示すように、振動子100の振動状態に応じた電気信号を取出すことができる。モニタ電極152,154およびモニタ電極172,174から取出す電気信号は、振動子100の基準信号FBである。 第1検出電極148および第2検出電極168は、図4(b)に示すように、振動子100の不正振動に応じた不正振動ノイズと、振動子100に角速度を加えたときに生じるコリオリ信号を取出すことができる。
【0042】
本発明の実施の形態に係る角速度検出装置は、第1検出電極148および第2検出電極168から取出した電気信号と、図4(a)に示す基準信号FBと、の差分演算を行ない、図4(b)に示す不正振動ノイズを除去して、コリオリ信号を取出す駆動ノイズキャンセル回路12を有している。
【0043】
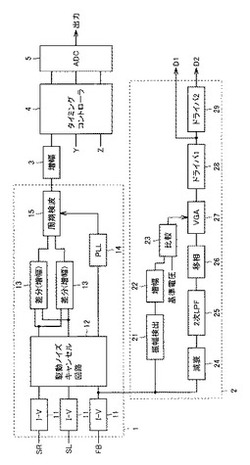
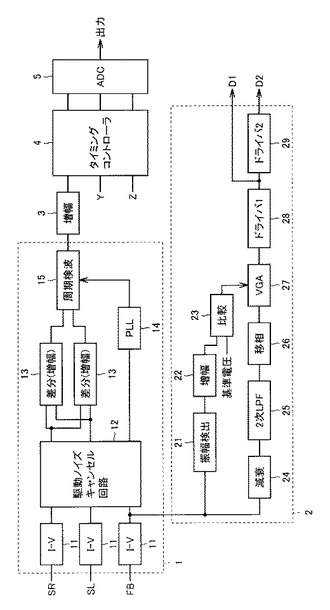
図5は、本発明の実施の形態に係る角速度検出装置の駆動回路および検出回路の構成を示すブロック図を示す。図5に示すブロック図には、検出回路1、駆動回路2、増幅回路3、タイミングコントローラ4およびアナログ−デジタル変換回路(ADC)5を図示してある。
【0044】
検出回路1は、振動子100の第2検出電極168から取出した電気信号SR、振動子100の第1検出電極148から取出した電気信号SL、および基準信号FBの入力からコリオリ信号を取出し、取出したコリオリ信号を増幅回路3に出力する。さらに詳しく検出回路1を説明すると、検出回路1は、電流−電圧変換回路11、駆動ノイズキャンセル回路12、差分回路13、PLL(Phase Locked Loop)回路14、および同期検波回路15を有している。
【0045】
電流−電圧変換回路11は、電気信号SR,SLおよび基準信号FBの電流信号を電圧信号に変換する。駆動ノイズキャンセル回路12は、後述するように電圧信号に変換した電気信号SR,SLから、基準信号FBに基づいて不正振動ノイズを除去する。
【0046】
差分回路13は、不正振動ノイズを除去した電気信号SRと電気信号SLとの差分を演算し、増幅する。同期検波回路15は、PLL回路14で位相を制御した基準信号FBに基づいて、電気信号SR,SLからコリオリ信号のみを取出し、増幅回路3に出力する。
【0047】
増幅回路3は、検出回路1から取出したコリオリ信号を、予め定めた増幅率で増幅する。タイミングコントローラ4は、図1に示したY方向およびZ方向に振動子が振動するそれぞれ別の角速度検出装置からのコリオリ信号とタイミングを調整する。アナログ−デジタル変換回路5は、タイミングコントローラ4でタイミングを調整したコリオリ信号をアナログ信号からデジタル信号に変換する。
【0048】
駆動回路2は、基準信号FBに基づいて、振動子100を駆動する駆動信号D1,D2を生成し、振動子100の各駆動電極に入力する。駆動回路2は、振幅検出回路21、増幅回路22、比較回路23、減衰回路24、2次LPF(Low-pass filter)回路25、移相回路26、VGA(Variable Gain Amplifier)回路27、ドライバ1回路28、およびドライバ2回路29を有している。
【0049】
振幅検出回路21は、基準信号FBの振幅を検出する。増幅回路22は、検出した基準信号FBの振幅を増幅する。比較回路23は、増幅回路22で増幅した基準信号FBの振幅が基準電圧以下か否かを比較する。
【0050】
減衰回路24は、基準信号FBを減衰させる。2次LPF回路25は、減衰した基準信号FBのうち、低周波数の成分を通過させる。移相回路26は、2次LPF回路25を通過した基準信号FBの位相を予め定められた位相分だけ移動する。VGA回路27は、比較回路23の比較結果に基づいて増幅率を可変し、移相した基準信号FBを増幅する。ドライバ1回路28は、増幅した基準信号FBから第1駆動電極144(第3駆動電極164)に供給する駆動信号D1を生成する。ドライバ2回路29は、駆動信号D2から第2駆動電極146(第4駆動電極166)に供給する駆動信号D2を生成する。
【0051】
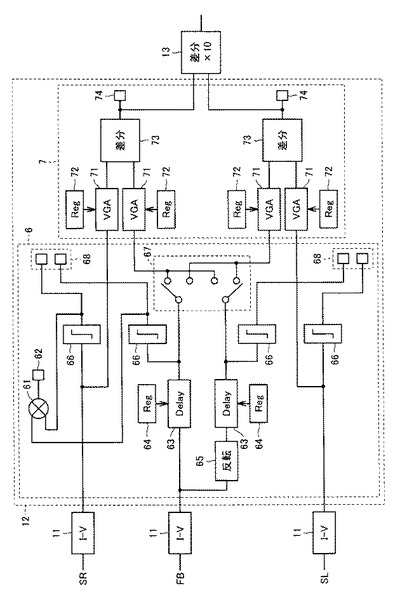
さらに、本発明の実施の形態に係る角速度検出装置は、不正振動ノイズを除去する駆動ノイズキャンセル回路12を有していることを特徴としている。そのため、駆動ノイズキャンセル回路12について、さらに詳しく説明する。図6は、本発明の実施の形態に係る角速度検出装置の駆動ノイズキャンセル回路12の構成を示すブロック図である。
【0052】
図6に示す駆動ノイズキャンセル回路12は、電流−電圧変換回路11で電圧信号に変換した電気信号SR,SLの位相に対して基準信号FBの位相を調整する位相調整部6と、電気信号SR,SLと基準信号FBとの差分が小さくなるように、電気信号SR,SLの振幅および基準信号FBの振幅のうち少なくとも一方の振幅を調整する振幅調整部7とを有している。
【0053】
位相調整部6は、電気信号SRの位相に対する基準信号FBの位相の差に基づき、基準信号FBの位相を調整する。つまり、位相調整部6は、基準信号FBの位相を電気信号SRの位相に一致するように調整する。具体的には、位相調整部6は、電気信号SRの位相に対する基準信号FBの位相をモニタするためのパッド電極62を有している。パッド電極62には、電気信号SRの立上がりを検出するラッチ回路66の出力と、基準信号FBの立上がりを検出するラッチ回路66の出力とのXOR演算を行なう演算部61の結果が出力される。そのため、パッド電極62は、電気信号SRの位相に対する基準信号FBの位相が一致すればHレベル信号が出力され、一致しなければLレベル信号が出力される。
【0054】
位相調整部6は、パッド電極62でモニタした電気信号SRの位相に対する基準信号FBの位相の差に基づき、基準信号FBの位相を調整する位相遅延部(Delay)63を有している。位相遅延部63は、基準信号FBの位相の調整量を記憶するレジスタ(Reg)部64を有し、パッド電極62でモニタした電気信号SRの位相に対する基準信号FBの位相の差に基づき、電気信号SRの位相に一致する基準信号FBの位相の調整量をレジスタ部64に記憶する。
【0055】
なお、位相調整部6は、パッド電極62でモニタした電気信号SRの位相に対する基準信号FBの位相の差に基づき、基準信号FBの位相の調整量を決め、レジスタ部64に記憶する構成に限定されるものではなく、パッド電極62の出力に基づいて、基準信号FBの位相の調整量を自動的に決めるフィードバック回路有する構成であってもよい。
【0056】
図3で示したように、電気信号SRと電気信号SLとは位相が180度反転しているので、電気信号SRの位相に対して基準信号FBの位相が一致すれば、基準信号FBの位相を180度反転した反転基準信号の位相と電気信号SLの位相とが一致することになる。この関係を利用して、位相調整部6は、基準信号FBの位相を180度反転して反転基準信号を生成する反転部65を有している。位相調整部6は、反転部65した基準信号FBに対しても位相遅延部63でレジスタ部64に記憶した調整量だけ位相を調整する。なお、位相調整部6は、図6に示すように、位相遅延部63で位相を調整する前に反転部65を設ける構成に限定されるのではなく、位相遅延部63で位相を調整した後に反転部65を設ける構成であってもよい。
【0057】
さらに、位相調整部6は、電気信号SRに対する差分演算の相手を、基準信号FBまたは反転基準信号の一方に切替え、電気信号SLに対する差分演算の相手を、基準信号FBまたは反転基準信号の他方に切替える切替部67を有している。切替部67は、電気信号SRの位相の一致する差分演算の相手を、基準信号FBまたは反転基準信号に簡単に切替えることができる。図6に示す切替部67では、電気信号SRの差分演算の相手が基準信号FBで、電気信号SLの差分演算の相手が反転基準信号である。
【0058】
なお、位相調整部6は、電気信号SRの位相と、基準信号FBまたは反転基準信号の位相とをモニタするためのパッド電極68、電気信号SLの位相と、基準信号FBまたは反転基準信号の位相とをモニタするためのパッド電極68を有している。
【0059】
また、位相調整部6は、振動子100が音叉型振動子の場合の構成であり、振動子100が片持ち梁型振動子であれば、反転部65および切替部67は不要である。
【0060】
次に、振幅調整部7は、電気信号SRの振幅と基準信号FBの振幅との差分に基づき、電気信号SRおよび基準信号FBのうち少なくとも一方の振幅を調整する。つまり、振幅調整部7は、電気信号SRの振幅と基準信号FBの振幅とが一致するように調整する。具体的には、振幅調整部7は、電気信号SRと基準信号FBとの差分をモニタするためのパッド電極74を有している。パッド電極74には、電気信号SRと、基準信号FBまたは反転基準信号との差分演算を行なう差分回路73の結果が出力される。そのため、パッド電極74は、電気信号SRの振幅と基準信号FBまたは反転基準信号の振幅とが一致すれば、差分回路73の結果である差分値が小さくなり、一致しなければ差分値が大きくなる。
【0061】
振幅調整部7は、パッド電極74でモニタした電気信号SRと基準信号FBとの差分に基づき、電気信号SRの振幅を調整するVGA回路71と、基準信号FBの振幅を調整するVGA回路71とを有している。VGA回路71は、振幅の調整量を記憶するレジスタ部72を有し、パッド電極74でモニタした電気信号SRと基準信号FBとの差分に基づき、電気信号SRの振幅と基準信号FBまたは反転基準信号の振幅とが一致するように、電気信号SRおよび基準信号FBのうち少なくとも一方の振幅の調整量をレジスタ部72に記憶する。
【0062】
なお、振幅調整部7は、パッド電極74でモニタした電気信号SRと基準信号FBとの差分に基づき、電気信号SRおよび基準信号FBのうち少なくとも一方の振幅の調整量を決め、レジスタ部72に記憶する構成に限定されるものではなく、パッド電極74の出力に基づいて、電気信号SRおよび基準信号FBのうち少なくとも一方の振幅の調整量を自動的に決めるフィードバック回路有する構成であってもよい。
【0063】
以上のように、本発明の実施の形態に係る角速度検出装置は、位相調整部6および振幅調整部7を有する駆動ノイズキャンセル回路12を備えているので、振動子100から検出した電気信号SR,SLと基準信号FBとの差分演算を行ない、電気信号SR,SLから振動子100に生じている不正振動ノイズを除去できる。そのため、本発明の実施の形態に係る角速度検出装置は、振動子100から検出した電気信号SR,SLに含まれる不正振動ノイズの影響を抑え、予め定められた値以上のSN比を確保して歩留まりを改善することができる。
【0064】
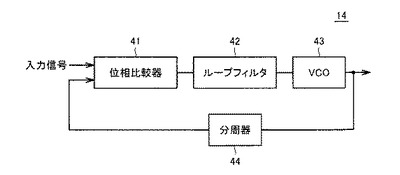
次に、駆動回路2のPLL回路14について、さらに詳しく説明する。図7は、本発明の実施の形態に係る角速度検出装置に用いるPLL回路14の構成を示すブロック図である。PLL回路14は、1つの発振器であり、出力信号の周波数および位相が、常に入力信号の周波数および位相に一致するように、入力信号と出力信号との位相差に基づいてフィードバック制御を行なう回路である。図7に示すPLL回路14は、位相比較器41、ループフィルタ42、電圧制御発振器(VCO)43、および分周器44を有している。
【0065】
位相比較器41は、入力信号と、分周器44から出力される信号との位相差を検出する。ループフィルタ42は、位相比較器41から出力されるリプルを含んだ直流信号を平均化して、交流成分を少なく抑えた直流信号に変換するローパスフィルタである。電圧制御発振器43は、入力する直流電流によって発振周波数を制御することができる、可変周波数発振器である。
【0066】
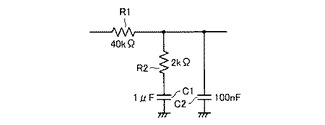
PLL回路14を一般的な回路で構成した場合、ループフィルタ42は、抵抗と容量とを組合わせたラグ・リード型となる。図8は、ラグ・リード型のループフィルタの構成を示す回路図である。図8に示すループフィルタは、抵抗R1と、該抵抗R1の一端に並列に接続した容量C1、C2と、抵抗R1と容量C1との間に接続した抵抗R2とを有している。しかし、PLL回路14に用いるループフィルタは、時定数を大きくする必要があるため、抵抗および容量の値を大きくする必要があり、半導体基板上に作り込むのが困難であった。具体的に、図8に示すループフィルタでは、抵抗R1が40kΩ、抵抗R2が2kΩ、容量C1が1μF、容量C2が100nF(=0.1μF)となる。特に、図8に示すループフィルタでは、大きい値の容量が必要となるため、半導体基板上に作り込むと容量を設ける面積が大きくなり、回路自体が大型化してしまう問題があった。
【0067】
そこで、本発明の実施の形態に係るPLL回路14では、スイッチトキャパシタフィルタ(SCF:Switched Capacitor Filter)を用いたループフィルタ42を採用している。図9は、本発明の実施の形態に係るPLL回路14のループフィルタ42の構成を示すブロック図および出力特性を示すグラフである。また、図10は、ループフィルタ42を構成する回路を示す回路図である。
【0068】
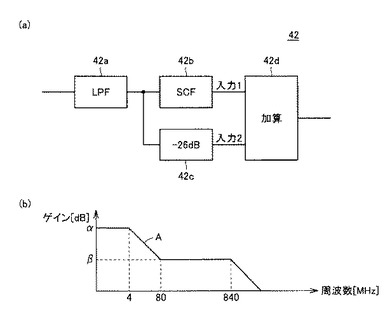
図9(a)に示すループフィルタ42は、ローパスフィルタ(LPF)回路42a、スイッチトキャパシタフィルタ42b、−26dBゲイン回路42c、および加算器42dを有している。
【0069】
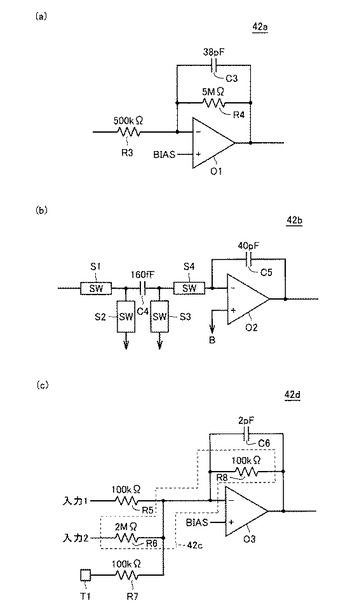
ローパスフィルタ回路42aは、図10(a)に示すように、オペアンプO1、オペアンプO1の反転入力に接続した抵抗R3、オペアンプO1の反転入力と出力との間に並列に接続した抵抗R4、容量C3を有している。なお、抵抗R3は500kΩ、抵抗R4が5MΩ、容量C3が38pFである。
【0070】
スイッチトキャパシタフィルタ42bは、図10(b)に示すように、容量C4、容量C4の入力側に接続されたスイッチ素子S1,S2、容量C4の出力側に接続されたスイッチ素子S2,S4、スイッチ素子S4を反転入力に接続したオペアンプO2、オペアンプO2の反転入力と出力との間に並列に接続した容量C5を有している。なお、容量C4は160fF、容量C5は40pFである。
【0071】
加算器42dは、図10(c)に示すように、オペアンプO3、オペアンプO3の反転入力に接続した抵抗R5,R6,R7、オペアンプO3の反転入力と出力との間に並列に接続した抵抗R8,容量C6を有している。なお、抵抗R5、抵抗R7および抵抗R8は100kΩ、抵抗R6は2MΩ、容量C6は2pFである。加算器42dは、抵抗R5を介してスイッチトキャパシタフィルタ42bからの信号が入力1として抵抗R5から入力される。また、加算器42dは、抵抗R6および抵抗R8が−26dBゲイン回路42cを構成している。−26dBゲイン回路42cは、抵抗R6に入力する信号を入力2とし、ローパスフィルタ回路42aの出力信号に対してゲインが−26dB低下した信号を生成する。
【0072】
ループフィルタ42は、図9(a)および図10に示すように構成することで、図9(b)に示す折線Aのような周波数に対してゲインが変化するように調整してある。具体的に、周波数が4MHzまではゲインがαdBと一定で、周波数が4MHz〜80MHzはゲインがαdBからβdBへ変化し、80MHz〜840MHzはゲインがβdBと一定である。
【0073】
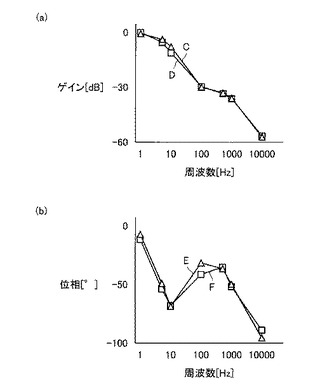
ループフィルタ42は、図9(b)に示すように周波数に対するゲインを調整することで、ラグ・リード型のループフィルタと同等の機能を実現することができ、ラグ・リード型のループフィルタと置き換えることが可能となる。図11は、スイッチトキャパシタフィルタ42bで構成したループフィルタ42と、ラグ・リード型のループフィルタとの周波数に対するゲインおよび位相の変化を示すグラフである。
【0074】
図11(a)に示すグラフは、横軸を周波数[Hz]、縦軸をゲイン[dB]として、スイッチトキャパシタフィルタ42bで構成したループフィルタ42と、ラグ・リード型のループフィルタとの周波数に対するゲインの変化を示している。なお、折線Cがスイッチトキャパシタフィルタ42bを採用したループフィルタ42を示し、折線Dがラグ・リード型のループフィルタを示しており、両者はほぼ同じ変化である。
【0075】
図11(b)に示すグラフは、横軸を周波数[Hz]、縦軸を位相[°]として、スイッチトキャパシタフィルタ42bで構成したループフィルタ42と、ラグ・リード型のループフィルタとの周波数に対する位相の変化を示している。なお、折線Eがスイッチトキャパシタフィルタ42bを採用したループフィルタ42を示し、折線Fがラグ・リード型のループフィルタを示しており、両者はほぼ同じ変化である。
【0076】
スイッチトキャパシタフィルタ42bで構成したループフィルタ42は、図11から分かるように、ラグ・リード型のループフィルタと同等の周波数に対するゲインおよび位相の変化を示している。なお、図11に示すグラフは、SPICE(Simulation Program with Integrated Circuit Emphasis)を用いて、スイッチトキャパシタフィルタ42bで構成したループフィルタ42およびラグ・リード型のループフィルタのシミュレーションした結果である。
【0077】
ループフィルタ42は、図10に示すように、容量C3〜容量C6が最大でも40pF以下と小さく、ラグ・リード型のループフィルタのように1μFの容量が不要である。そのため、ループフィルタ42は、ラグ・リード型のループフィルタのように容量を半導体基板上に形成することができずに外付けする必要はなく、半導体基板上に容量C3〜容量C6を形成することができる。つまり、ループフィルタ42を含むPLL回路14は、外付け部品を無くすことができる。
【0078】
以上のように、本発明の実施の形態に係る角速度検出装置は、駆動回路2のPLL回路14に、スイッチトキャパシタフィルタ42bで構成したループフィルタ42を用いるので、容量などの外付け部品が不要となり、小型化が可能となる。さらに、本発明の実施の形態に係る角速度検出装置は、外付け部品が不要となることで、外付け部品を実装する工程を省略することができるため、製造コストを安価にすることができる。
【0079】
今回開示された実施の形態はすべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上記した実施の形態ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。
【符号の説明】
【0080】
1 検出回路、2 駆動回路、3,22 増幅回路、4 タイミングコントローラ、5 デジタル変換回路、6 位相調整部、7 振幅調整部、11 電圧変換回路、12 駆動ノイズキャンセル回路、13,73 差分回路、14 PLL回路、15 同期検波回路、21 振幅検出回路、23 比較回路、24 減衰回路、25 2次LPF回路、26 移相回路、27,71 VGA回路、28 ドライバ1回路、29 ドライバ2回路、41 位相比較器、42 ループフィルタ、42a ローパスフィルタ回路、42b スイッチトキャパシタフィルタ、42c −26dBゲイン回路、42d 加算器、43 電圧制御発振器、44 分周器、61 演算部、62,68,74 パッド電極、63 位相遅延部、64,72 レジスタ部、65 反転部、66 ラッチ回路、67 切替部、100 振動子、110 基部、120 第1振動腕、130 第2振動腕、140 第1幅広部、142 圧電体、142a 第1主面、142b 第2主面、144 第1駆動電極、145,165 境界部、146 第2駆動電極、148 第1検出電極、152,154,172,174 モニタ電極、156 共通駆動電極、160 第2幅広部、164 第3駆動電極、166 第4駆動電極、168 第2検出電極、194 下部電極、196 半導体基板。
【技術分野】
【0001】
本発明は、角速度検出装置に関し、振動子を用いて角速度を検出する角速度検出装置に関する。
【背景技術】
【0002】
角速度検出装置は、ジャイロセンサとも呼ばれ、撮像手段の手振れ検出やカーナビゲーションの方向検出に利用されている。角速度検出装置は、近年さらに需要が様々な分野に拡大すると共に、小型化、高性能化などの要求がなされている。
【0003】
このような小型化の要求のため、角速度検出装置は、角速度を検出する振動子と、振動子からの信号を処理する電子回路とを1つのパッケージとして形成される。特許文献1に開示してある角速度検出装置は、支持基板に、振動子と、振動子を制御する半導体部品と、振動子と半導体部品を電気的に接続する回路部品とを形成してある。さらに、特許文献1に開示してある角速度検出装置は、振動子、半導体部品および回路部品を形成した支持基板の一面を覆う蓋体を有している。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2011−133486号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に開示してある角速度検出装置などに用いる振動子には、1つの半導体ウェハに複数個同時に形成し、個々切出して製造する場合がある。その場合、振動子は、製造プロセスのバラツキにより、半導体ウェハのどの位置から切出されたかによって、不正振動によるノイズ(以下、不正振動ノイズともいう)の位相や振幅が異なる。たとえば、不正振動ノイズは、半導体ウェハの中心部から切出した振動子の方が、外周から切出した振動子の方より振幅が小さくなる。また、たとえば、不正振動ノイズは、半導体ウェハの中心部を挟んで対称となる位置から切出した振動子で、位相が反転する。ここで、振動子に発生する不正振動ノイズは、振動子に角速度を加わらない状態でも検出されるノイズ信号である。
【0006】
また、角速度検出装置において重要視される評価特性の1つにSN比がある。このSN比が予め定められた値未満となった場合、不良品として判定されるため、歩留まりを改善するためには、SN比が予め定められた値以上にしなければならない。角速度検出装置のSN比を上げるためには、信号成分Sを上げるか、ノイズ成分Nを下げる必要がある。特に、ノイズ成分Nを下げる場合、振動子から検出した信号から取出したい信号(コリオリ信号)のみを増幅して取出せる信号検出回路が必要となる。
【0007】
しかし、信号検出回路は、検出した信号に不正振動ノイズが含まれていると、回路前段において当該不正振動ノイズも一緒に増幅するため、取出したい信号(コリオリ信号)を十分に増幅することができない。そのため、角速度検出装置は、予め定められた値以上のSN比を確保することができず歩留まりを改善することができないという問題があった。
【0008】
それゆえに、本発明は、上記問題点を解決するためになされたものであり、振動子から検出した信号に含まれる不正振動ノイズの影響を抑え、予め定められた値以上のSN比を確保して歩留まりを改善することができる角速度検出装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明に係る角速度検出装置は、コリオリ力に応じた電気信号と、コリオリ力に応じて変化しない基準信号とを検出することが可能な振動子と、振動子を駆動する駆動回路と、振動子から検出した電気信号に対して予め定められた処理を行ない角速度を検出する検出回路とを備える角速度検出装置であって、検出回路は、振動子から検出した電気信号と基準信号との差分演算を行ない、電気信号から振動子に生じている不正振動によるノイズを除去する駆動ノイズキャンセル回路を有している。
【0010】
好ましくは、駆動ノイズキャンセル回路は、電気信号の位相に対して基準信号の位相を調整する位相調整部と、電気信号と基準信号との差分が小さくなるように、電気信号または基準信号のうち少なくとも一方の振幅を調整する振幅調整部とを有する。
【0011】
好ましくは、位相調整部は、電気信号の位相に対する基準信号の位相をモニタするための第1パッド電極と、第1パッド電極でモニタした電気信号の位相に対する基準信号の位相の差に基づき、基準信号の位相を調整する位相遅延部と有し、振幅調整部は、電気信号の振幅に対する基準信号の振幅をモニタするための第2パッド電極と、第2パッド電極でモニタした電気信号と基準信号との差分に基づき、電気信号または基準信号のうち少なくとも一方の振幅を調整する振幅増幅部と有する。
【0012】
好ましくは、振動子は、音叉型振動子であり、半導体基板に形成される基部と、基部から延設され第1の幅を有する第1幅広部と、第1幅広部と並行して設けられ基部から延設される第2幅広部と、第1幅広部から延設し第1の幅よりも小さな第2の幅を有する第1幅狭部と、第2幅広部から延設し第2の幅を有する第2幅狭部とを有し、第1幅広部および第2幅広部を振動させるための駆動信号を印加する駆動電極を第1幅広部および第2幅広部に形成し、第1幅広部に形成された強誘電体層に生じるコリオリ力に応じた電気信号を検出する第1の検出電極を第1幅広部に形成し、第2幅広部に形成された強誘電体層に生じるコリオリ力に応じた電気信号を検出する第2の検出電極を第2幅広部に形成し、コリオリ力に応じて変化しない基準信号を検出するモニタ電極を第1幅狭部および第2幅狭部のうち少なくとも一方に形成する。
【0013】
好ましくは、位相調整部は、モニタ電極で検出した基準信号の位相を反転させた反転基準信号を生成する位相反転部と、第1の検出電極で検出した電気信号に対する差分演算の相手を、基準信号または反転基準信号の一方に切替え、第2の検出電極で検出した電気信号に対する差分演算の相手を、基準信号または反転基準信号の他方に切替える切替部とを有する。
【0014】
好ましくは、振動子は、片持ち梁型振動子であり、半導体基板に形成される基部と、基部から延設され第1の幅を有する幅広部と、幅広部から延設され第1の幅よりも幅が小さな第2の幅を有する幅狭部とを有し、幅広部を振動させるための駆動信号を印加する駆動電極を幅広部に形成し、幅広部に形成された強誘電体層に生じるコリオリ力に応じた電気信号を検出する検出電極を幅広部に形成し、コリオリ力に応じて変化しない基準信号を検出するモニタ電極を幅狭部に形成する。
【0015】
好ましくは、駆動回路は、基準信号を入力信号とするPLL回路を備え、PLL回路に、スイッチトキャパシタフィルタで構成したループフィルタを用いる。
【発明の効果】
【0016】
本発明に係る角速度検出装置は、振動子から検出した電気信号と基準信号との差分演算を行ない、電気信号から振動子に生じている不正振動によるノイズ(不正振動ノイズ)を除去するので、振動子から検出した電気信号に含まれる不正振動ノイズの影響を抑え、予め定められた値以上のSN比を確保して歩留まりを改善することができる。
【図面の簡単な説明】
【0017】
【図1】本発明の実施の形態に係る角速度検出装置の振動子の構成を示す平面図である。
【図2】図1に示す振動子の切断線に沿った断面図を示す。
【図3】図1に示す振動子の各駆動電極に供給する電圧を模式的に示した波形図である。
【図4】図1に示す振動子の各検出電極および各モニタ電極から得られる信号を模式的に示した波形図である。
【図5】本発明の実施の形態に係る角速度検出装置の駆動回路および検出回路の構成を示すブロック図を示す。
【図6】本発明の実施の形態に係る角速度検出装置の駆動ノイズキャンセル回路の構成を示すブロック図である。
【図7】本発明の実施の形態に係る角速度検出装置に用いるPLL回路の構成を示すブロック図である。
【図8】ラグ・リード型のループフィルタの構成を示す回路図である。
【図9】本発明の実施の形態に係るPLL回路のループフィルタの構成を示すブロック図および出力特性を示すグラフである。
【図10】ループフィルタを構成する回路を示す回路図である。
【図11】スイッチトキャパシタフィルタで構成したループフィルタと、ラグ・リード型のループフィルタとの周波数に対するゲインおよび位相の変化を示すグラフである。
【発明を実施するための形態】
【0018】
以下、本発明に係る実施の形態について図面を参照して説明する。
(実施の形態)
図1は、本発明の実施の形態に係る角速度検出装置の振動子の構成を示す平面図である。図1にはX方向、Y方向、およびZ方向を示す記号が併記されている。なお、X方向は、振動子100の幅方向に相当し、Y方向は、振動子100の長さ方向に相当する。また、Z方向は、振動子100の高さ方向に対応し、紙面の奥側から手前側に向かう方向である。
【0019】
本発明の実施の形態に係る角速度検出装置は、振動子100の他に、振動子100を駆動する自励発振回路、および振動子100からの検出出力に基づいて角速度信号を処理する信号処理回路などを備えるが、説明の便宜上これらの回路は図示していない。また、振動子100は、音叉型振動子である。
【0020】
振動子100は、圧電体142が形成されたT字状の基部110を有する。基部110は振動子100が作り込まれる図示しない半導体基板の一部で固定されている。基部110の頂部から第1振動腕120と第2振動腕130が並行して設けられる。圧電体142は、基部110だけではなく、第1振動腕120、および第2振動腕130の一主面を覆って設けられている。第1振動腕120と第2振動腕130の形状および大きさはほぼ同じである。2つの振動腕は中心線CL−CLを境にして互いに線対称になるよう形成されている。
【0021】
第1振動腕120は細長い短冊状の第1幅広部140と、これよりも幅の細い短冊状の第1幅狭部150を有し、これらはそれぞれの長手方向が連なるように連続して形成されている。第1幅広部140の一部であって、これと第1幅狭部150との境界部145の近傍には比較的広い面積の圧電体142が露呈している。なお、圧電体142は基部110、第1振動腕120、および第2振動腕130の一主面上に連続して設けられる。すなわち、第1振動腕120と第2振動腕130は圧電体142を共有する。
【0022】
第2振動腕130は第1振動腕120とほぼ同形状を成す。すなわち、第2振動腕130は、細長いいわゆる短冊状の第2幅広部160と、これよりも幅の細い短冊状の第2幅狭部170とが互いの長手方向が連なるように連続して形成されている。第2幅広部160の一部であって、これと第2幅狭部170との境界部165の近傍には比較的広い面積の圧電体142が露呈している。
【0023】
第1振動腕120の第1幅広部140には、電気信号を入力するための第1駆動電極144、第2駆動電極146、および電気信号を出力するための第1検出電極148が各別に形成される。第1幅狭部150にはモニタ電極152,154が第1幅広部140と第1幅狭部150の境界部145から第1幅狭部150の長手方向に沿って延びるように形成されている。なお、モニタ電極152,154は第1幅狭部150の長手方向のほぼ中央部まで設けたものを図示したが、中央部よりもさらに先端側まで延設してもよい。いずれにしてもモニタ電極152,154の長手方向の長さは、境界部145から第1幅狭部150の長手方向に沿って随時設定すればよい。また、モニタ電極152,154は、第1幅狭部150に設けるだけでなく、第1幅狭部150の一部から境界部145を越えて第1幅広部140の一部に延設させてもよい。
【0024】
第2振動腕130の第2幅広部160には、電気信号を入力するための第3駆動電極164、第4駆動電極166、および電気信号を出力するための第2検出電極168が各別に形成される。これらの各電極は第1振動腕120の第1幅広部140に形成された各駆動電極、検出電極のものとほぼ同じ形状であり、かつ、それらの大きさもほぼ同じである。なお、第4駆動電極166は基部110側第2駆動電極146と共通に接続され共通駆動電極156を成している。
【0025】
第2幅狭部170にはモニタ電極172,174が、第2幅広部160と第2幅狭部170の境界部165から第2幅狭部170の長手方向に沿って延びるように形成される。なお、モニタ電極172,174は第2幅狭部170の長手方向のほぼ中央部まで設けたものを図示したが、中央部よりもさらに先端側まで延設してもよく、長手方向の中央部までは設けずに境界部165から第2幅狭部170の長手方向にわずかに延びるように配設してもかまわない。いずれにしてもモニタ電極172,174の長手方向の長さは、境界部165から第2幅狭部170の長手方向に沿って随時設定すればよい。また、モニタ電極172およびモニタ電極174は、第2幅狭部170の一部から境界部165を越えて第2幅広部160の一部に延設させるようにしてもかまわない。
【0026】
第1幅狭部150および第2幅狭部170に設けた各モニタ電極152,154,172,174には振動子100の振動状態に応じた電気信号が取出され、該電気信号は図示しない自励発振回路にフィードバックされる。モニタ電極152,154,172,174は角速度検出装置の振動子、すなわち、第1振動腕120および第2振動腕130のX方向、すなわち幅方向の共振周波数をモニタリングするために用意されている。モニタ電極172から取出した電気信号は図示しないバンドパスフィルタを介して増幅され、第4駆動電極166に帰還され、モニタ電極174から取出した電気信号は図示しないバンドパスフィルタを介して増幅され、第3駆動電極164に帰還される。同様にモニタ電極152から取出した電気信号は図示しないバンドパスフィルタを介して増幅され、第2駆動電極146に帰還され、モニタ電極154から取出した電気信号は図示しないバンドパスフィルタを介して増幅され、第1駆動電極144に帰還される。バンドパスフィルタでは電気信号が最も大きくなる周波数成分が取出される。仮にモニタ電極152,154,172,174を用意しなければ、第1振動腕120および第2振動腕130を所期の共振周波数で振動させることが期待できなくなる。第1検出電極148および第2検出電極168は振動子100のコリオリ力による振動変位を検出する。
【0027】
図1に示した振動子100は、幅x100、長さy100の大きさで示されている。幅x100の大きさはたとえば60μmであり、長さy100の大きさはたとえば500μm〜600μmである。したがって、長さy100は幅x100のほぼ10倍の大きさである。また、第1幅広部140および第2幅広部160の幅W1の大きさは、共に等しくたとえば24μmであり、第1幅狭部150および第2幅狭部170の幅W2の大きさは共に等しくたとえば10μmにそれぞれ設定される。
【0028】
第1駆動電極144および第3駆動電極164の幅は共に等しく幅x102で示される。幅x102の大きさは、たとえば2μmである。第2駆動電極146および第4駆動電極166の幅は共に等しく幅x104で示される。幅x104の大きさは、幅x102と等しいたとえば2μmである。
【0029】
第1幅広部140に設けられた第1検出電極148、および第2幅広部160に設けられた第2検出電極168の幅は共に等しく幅x106で示される。幅x106の大きさはたとえば16μmである。また第1駆動電極144と第1検出電極148との離間距離および、第3駆動電極164と第2検出電極168との離間距離x108は共に等しくたとえば1μmである。また第1検出電極148と第2駆動電極146との離間距離、および第2検出電極168と第4駆動電極166との離間距離x110は共に等しくたとえば1μmである。
【0030】
図1に示したものは振動腕を2つ有する振動子100、すなわち、音叉型振動子であった。しかし、本発明にかかる技術的思想は振動腕が1つのもの、すなわち、片持ち梁型振動子にも適用することもできる。したがって、本発明にかかる角速度検出装置を片持ち梁型振動子に適用する場合には第1振動腕120又は第2振動腕130のいずれか1つの構成要素を用意すれば足りる。
【0031】
図2は、図1に示す振動子100の切断線2A−2Aに沿った断面図を示す。図2に示す断面図は、第1幅広部140および第2幅広部160の断面図である。第1幅広部140および第2幅広部160には圧電体142が形成される。圧電体142の厚みはたとえば1.0μmである。第1幅広部140における圧電体142の第1主面142aには、紙面左側からみて第1駆動電極144、第1検出電極148、および第2駆動電極146がこの順序で所定の間隔を保って形成される。同様に、第2幅広部160における圧電体142の第1主面142aには、紙面右側からみて第3駆動電極164、第2検出電極168、および第4駆動電極166がこの順序で所定の間隔を保って形成される。これらの各電極の厚みは共に等しい。なお、図示していないが、これらの各電極上にはシリコン酸化物、たとえば二酸化シリコン膜(SiO2)からなる堆積膜を形成してもよい。
【0032】
圧電体142の第2主面142bには下部電極194、半導体基板196がこの順序で形成されている。下部電極194は、第1駆動電極144、第1検出電極148、および第2駆動電極146のそれぞれに対向して個別に形成されているが、圧電体142の第2主面142bに一体として形成してもよい。同様に、下部電極194は、第3駆動電極164、第2検出電極168、および第4駆動電極166のそれぞれに対向して個別に形成されているが、圧電体142の第2主面142bに一体として形成してもよい。
【0033】
下部電極194、圧電体142、および第4駆動電極166(第3駆動電極164)までの厚みはたとえば約1.4μmである。なお、圧電体142の第1主面142aに設けられた第3駆動電極164、第4駆動電極166、および第2検出電極168は共に同じ厚みで形成される。また下部電極194の厚みは、第3駆動電極164、第4駆動電極166、および第2検出電極168のそれらと同じ厚みで形成される。なお、第1振動腕120に形成される各駆動電極、各検出電極の厚みも第2振動腕130側と同じ大きさである。
【0034】
ここで、下部電極194には、たとえば白金(Pt)/チタン(Ti)の積層膜などを用いることが可能であり、上部電極である第1駆動電極144(第2駆動電極146、第1検出電極148、第3駆動電極164、第4駆動電極166、および第2検出電極168)には、たとえば酸化イリジウム(IrO2)/イリジウム(Ir)の積層膜や金(Au)膜などを用いることが可能である。圧電体142は、強誘電体層であり、たとえばチタン酸ジルコン酸鉛(PZT)膜やランタンドープジルコン酸チタン酸鉛(PLZT)膜などを用いることが可能である。なお、PZT層やPLZT層はゾルゲル法等により形成される。
【0035】
図3は、図1に示す振動子100の各駆動電極に供給する電圧を模式的に示した波形図である。図3(a)に示す供給電圧V1は、所定の振幅に設定され第1駆動電極144および第3駆動電極164に供給する交流電圧を示す。図3(b)に示す供給電圧V2は、第2駆動電極146および第4駆動電極166、すなわち、共通駆動電極156に供給する交流電圧を示す。供給電圧V1とV2の振幅はほぼ等しく、かつ位相は互いに180度ずれた、いわゆる位相反転の関係にある。図3(c)に示す供給電圧V3は、下部電極194に供給される直流電圧を示す。供給電圧V3は例えば0ボルトに設定される。
【0036】
ここで、図2に示す圧電体142であって、第1駆動電極144と下部電極194とに挟まれる部分には、第1駆動電極144に供給される供給電圧V1と下部電極194に供給される供給電圧V3による電位差が生じる。すなわち、圧電体142であって第1駆動電極144と下部電極194とに挟まれる部分には電位が(V1−V3)である電圧Vs1が印加されることになる。電圧Vs1が印加される圧電体142の該部分は電圧Vs1により圧縮・伸長変形し、第1伸縮運動を行う。
【0037】
一方、圧電体142であって、第2駆動電極146と下部電極194とに挟まれる部分には、第2駆動電極146に供給される供給電圧V2と下部電極194に供給される供給電圧V3による電位差が生じる。すなわち、圧電体142であって第2駆動電極146と下部電極194とに挟まれる部分には電位が(V2−V3)である電圧Vs2が印加されることになる。したがって電圧Vs2が印加される圧電体142の該部分は電圧Vs2により伸長・圧縮変形し、上記第1伸縮運動とは逆位相の第2伸縮運動を行う。
【0038】
第1伸縮運動および第2伸縮運動により振動子100の第1幅広部140(第2幅広部160)はX方向に互いに離間および互いに接近する方向、すなわち、横方向の横振動を行う。
【0039】
第1幅広部140(第2幅広部160)が横振動することにより第1幅狭部150(第2幅狭部170)も該横振動と同周期で振動する。ここで、第1幅狭部150(第2幅狭部170)に設けられたモニタ電極152(モニタ電極172)により、第1幅狭部150(第2幅狭部170)が該横振動をすることにより発生する電気信号を取出し、図示しない自励発振回路を介して第2駆動電極146(第4駆動電極166)に供給する。
【0040】
さらに、第1幅狭部150(第2幅狭部170)に設けられたモニタ電極154(モニタ電極174)により、第1幅狭部150(第2幅狭部170)が該横振動をすることにより発生する電気信号を取出し、図示しない自励発振回路を介して第1駆動電極144(第3駆動電極164)に供給する。
【0041】
次に、図3に示す電圧を振動子100の各駆動電極に供給した場合に、第1検出電極148、第2検出電極168、モニタ電極152,154およびモニタ電極172,174から得られる信号について説明する。図4は、図1に示す振動子100の各検出電極および各モニタ電極から得られる信号を模式的に示した波形図である。モニタ電極152,154およびモニタ電極172,174は、図4(a)に示すように、振動子100の振動状態に応じた電気信号を取出すことができる。モニタ電極152,154およびモニタ電極172,174から取出す電気信号は、振動子100の基準信号FBである。 第1検出電極148および第2検出電極168は、図4(b)に示すように、振動子100の不正振動に応じた不正振動ノイズと、振動子100に角速度を加えたときに生じるコリオリ信号を取出すことができる。
【0042】
本発明の実施の形態に係る角速度検出装置は、第1検出電極148および第2検出電極168から取出した電気信号と、図4(a)に示す基準信号FBと、の差分演算を行ない、図4(b)に示す不正振動ノイズを除去して、コリオリ信号を取出す駆動ノイズキャンセル回路12を有している。
【0043】
図5は、本発明の実施の形態に係る角速度検出装置の駆動回路および検出回路の構成を示すブロック図を示す。図5に示すブロック図には、検出回路1、駆動回路2、増幅回路3、タイミングコントローラ4およびアナログ−デジタル変換回路(ADC)5を図示してある。
【0044】
検出回路1は、振動子100の第2検出電極168から取出した電気信号SR、振動子100の第1検出電極148から取出した電気信号SL、および基準信号FBの入力からコリオリ信号を取出し、取出したコリオリ信号を増幅回路3に出力する。さらに詳しく検出回路1を説明すると、検出回路1は、電流−電圧変換回路11、駆動ノイズキャンセル回路12、差分回路13、PLL(Phase Locked Loop)回路14、および同期検波回路15を有している。
【0045】
電流−電圧変換回路11は、電気信号SR,SLおよび基準信号FBの電流信号を電圧信号に変換する。駆動ノイズキャンセル回路12は、後述するように電圧信号に変換した電気信号SR,SLから、基準信号FBに基づいて不正振動ノイズを除去する。
【0046】
差分回路13は、不正振動ノイズを除去した電気信号SRと電気信号SLとの差分を演算し、増幅する。同期検波回路15は、PLL回路14で位相を制御した基準信号FBに基づいて、電気信号SR,SLからコリオリ信号のみを取出し、増幅回路3に出力する。
【0047】
増幅回路3は、検出回路1から取出したコリオリ信号を、予め定めた増幅率で増幅する。タイミングコントローラ4は、図1に示したY方向およびZ方向に振動子が振動するそれぞれ別の角速度検出装置からのコリオリ信号とタイミングを調整する。アナログ−デジタル変換回路5は、タイミングコントローラ4でタイミングを調整したコリオリ信号をアナログ信号からデジタル信号に変換する。
【0048】
駆動回路2は、基準信号FBに基づいて、振動子100を駆動する駆動信号D1,D2を生成し、振動子100の各駆動電極に入力する。駆動回路2は、振幅検出回路21、増幅回路22、比較回路23、減衰回路24、2次LPF(Low-pass filter)回路25、移相回路26、VGA(Variable Gain Amplifier)回路27、ドライバ1回路28、およびドライバ2回路29を有している。
【0049】
振幅検出回路21は、基準信号FBの振幅を検出する。増幅回路22は、検出した基準信号FBの振幅を増幅する。比較回路23は、増幅回路22で増幅した基準信号FBの振幅が基準電圧以下か否かを比較する。
【0050】
減衰回路24は、基準信号FBを減衰させる。2次LPF回路25は、減衰した基準信号FBのうち、低周波数の成分を通過させる。移相回路26は、2次LPF回路25を通過した基準信号FBの位相を予め定められた位相分だけ移動する。VGA回路27は、比較回路23の比較結果に基づいて増幅率を可変し、移相した基準信号FBを増幅する。ドライバ1回路28は、増幅した基準信号FBから第1駆動電極144(第3駆動電極164)に供給する駆動信号D1を生成する。ドライバ2回路29は、駆動信号D2から第2駆動電極146(第4駆動電極166)に供給する駆動信号D2を生成する。
【0051】
さらに、本発明の実施の形態に係る角速度検出装置は、不正振動ノイズを除去する駆動ノイズキャンセル回路12を有していることを特徴としている。そのため、駆動ノイズキャンセル回路12について、さらに詳しく説明する。図6は、本発明の実施の形態に係る角速度検出装置の駆動ノイズキャンセル回路12の構成を示すブロック図である。
【0052】
図6に示す駆動ノイズキャンセル回路12は、電流−電圧変換回路11で電圧信号に変換した電気信号SR,SLの位相に対して基準信号FBの位相を調整する位相調整部6と、電気信号SR,SLと基準信号FBとの差分が小さくなるように、電気信号SR,SLの振幅および基準信号FBの振幅のうち少なくとも一方の振幅を調整する振幅調整部7とを有している。
【0053】
位相調整部6は、電気信号SRの位相に対する基準信号FBの位相の差に基づき、基準信号FBの位相を調整する。つまり、位相調整部6は、基準信号FBの位相を電気信号SRの位相に一致するように調整する。具体的には、位相調整部6は、電気信号SRの位相に対する基準信号FBの位相をモニタするためのパッド電極62を有している。パッド電極62には、電気信号SRの立上がりを検出するラッチ回路66の出力と、基準信号FBの立上がりを検出するラッチ回路66の出力とのXOR演算を行なう演算部61の結果が出力される。そのため、パッド電極62は、電気信号SRの位相に対する基準信号FBの位相が一致すればHレベル信号が出力され、一致しなければLレベル信号が出力される。
【0054】
位相調整部6は、パッド電極62でモニタした電気信号SRの位相に対する基準信号FBの位相の差に基づき、基準信号FBの位相を調整する位相遅延部(Delay)63を有している。位相遅延部63は、基準信号FBの位相の調整量を記憶するレジスタ(Reg)部64を有し、パッド電極62でモニタした電気信号SRの位相に対する基準信号FBの位相の差に基づき、電気信号SRの位相に一致する基準信号FBの位相の調整量をレジスタ部64に記憶する。
【0055】
なお、位相調整部6は、パッド電極62でモニタした電気信号SRの位相に対する基準信号FBの位相の差に基づき、基準信号FBの位相の調整量を決め、レジスタ部64に記憶する構成に限定されるものではなく、パッド電極62の出力に基づいて、基準信号FBの位相の調整量を自動的に決めるフィードバック回路有する構成であってもよい。
【0056】
図3で示したように、電気信号SRと電気信号SLとは位相が180度反転しているので、電気信号SRの位相に対して基準信号FBの位相が一致すれば、基準信号FBの位相を180度反転した反転基準信号の位相と電気信号SLの位相とが一致することになる。この関係を利用して、位相調整部6は、基準信号FBの位相を180度反転して反転基準信号を生成する反転部65を有している。位相調整部6は、反転部65した基準信号FBに対しても位相遅延部63でレジスタ部64に記憶した調整量だけ位相を調整する。なお、位相調整部6は、図6に示すように、位相遅延部63で位相を調整する前に反転部65を設ける構成に限定されるのではなく、位相遅延部63で位相を調整した後に反転部65を設ける構成であってもよい。
【0057】
さらに、位相調整部6は、電気信号SRに対する差分演算の相手を、基準信号FBまたは反転基準信号の一方に切替え、電気信号SLに対する差分演算の相手を、基準信号FBまたは反転基準信号の他方に切替える切替部67を有している。切替部67は、電気信号SRの位相の一致する差分演算の相手を、基準信号FBまたは反転基準信号に簡単に切替えることができる。図6に示す切替部67では、電気信号SRの差分演算の相手が基準信号FBで、電気信号SLの差分演算の相手が反転基準信号である。
【0058】
なお、位相調整部6は、電気信号SRの位相と、基準信号FBまたは反転基準信号の位相とをモニタするためのパッド電極68、電気信号SLの位相と、基準信号FBまたは反転基準信号の位相とをモニタするためのパッド電極68を有している。
【0059】
また、位相調整部6は、振動子100が音叉型振動子の場合の構成であり、振動子100が片持ち梁型振動子であれば、反転部65および切替部67は不要である。
【0060】
次に、振幅調整部7は、電気信号SRの振幅と基準信号FBの振幅との差分に基づき、電気信号SRおよび基準信号FBのうち少なくとも一方の振幅を調整する。つまり、振幅調整部7は、電気信号SRの振幅と基準信号FBの振幅とが一致するように調整する。具体的には、振幅調整部7は、電気信号SRと基準信号FBとの差分をモニタするためのパッド電極74を有している。パッド電極74には、電気信号SRと、基準信号FBまたは反転基準信号との差分演算を行なう差分回路73の結果が出力される。そのため、パッド電極74は、電気信号SRの振幅と基準信号FBまたは反転基準信号の振幅とが一致すれば、差分回路73の結果である差分値が小さくなり、一致しなければ差分値が大きくなる。
【0061】
振幅調整部7は、パッド電極74でモニタした電気信号SRと基準信号FBとの差分に基づき、電気信号SRの振幅を調整するVGA回路71と、基準信号FBの振幅を調整するVGA回路71とを有している。VGA回路71は、振幅の調整量を記憶するレジスタ部72を有し、パッド電極74でモニタした電気信号SRと基準信号FBとの差分に基づき、電気信号SRの振幅と基準信号FBまたは反転基準信号の振幅とが一致するように、電気信号SRおよび基準信号FBのうち少なくとも一方の振幅の調整量をレジスタ部72に記憶する。
【0062】
なお、振幅調整部7は、パッド電極74でモニタした電気信号SRと基準信号FBとの差分に基づき、電気信号SRおよび基準信号FBのうち少なくとも一方の振幅の調整量を決め、レジスタ部72に記憶する構成に限定されるものではなく、パッド電極74の出力に基づいて、電気信号SRおよび基準信号FBのうち少なくとも一方の振幅の調整量を自動的に決めるフィードバック回路有する構成であってもよい。
【0063】
以上のように、本発明の実施の形態に係る角速度検出装置は、位相調整部6および振幅調整部7を有する駆動ノイズキャンセル回路12を備えているので、振動子100から検出した電気信号SR,SLと基準信号FBとの差分演算を行ない、電気信号SR,SLから振動子100に生じている不正振動ノイズを除去できる。そのため、本発明の実施の形態に係る角速度検出装置は、振動子100から検出した電気信号SR,SLに含まれる不正振動ノイズの影響を抑え、予め定められた値以上のSN比を確保して歩留まりを改善することができる。
【0064】
次に、駆動回路2のPLL回路14について、さらに詳しく説明する。図7は、本発明の実施の形態に係る角速度検出装置に用いるPLL回路14の構成を示すブロック図である。PLL回路14は、1つの発振器であり、出力信号の周波数および位相が、常に入力信号の周波数および位相に一致するように、入力信号と出力信号との位相差に基づいてフィードバック制御を行なう回路である。図7に示すPLL回路14は、位相比較器41、ループフィルタ42、電圧制御発振器(VCO)43、および分周器44を有している。
【0065】
位相比較器41は、入力信号と、分周器44から出力される信号との位相差を検出する。ループフィルタ42は、位相比較器41から出力されるリプルを含んだ直流信号を平均化して、交流成分を少なく抑えた直流信号に変換するローパスフィルタである。電圧制御発振器43は、入力する直流電流によって発振周波数を制御することができる、可変周波数発振器である。
【0066】
PLL回路14を一般的な回路で構成した場合、ループフィルタ42は、抵抗と容量とを組合わせたラグ・リード型となる。図8は、ラグ・リード型のループフィルタの構成を示す回路図である。図8に示すループフィルタは、抵抗R1と、該抵抗R1の一端に並列に接続した容量C1、C2と、抵抗R1と容量C1との間に接続した抵抗R2とを有している。しかし、PLL回路14に用いるループフィルタは、時定数を大きくする必要があるため、抵抗および容量の値を大きくする必要があり、半導体基板上に作り込むのが困難であった。具体的に、図8に示すループフィルタでは、抵抗R1が40kΩ、抵抗R2が2kΩ、容量C1が1μF、容量C2が100nF(=0.1μF)となる。特に、図8に示すループフィルタでは、大きい値の容量が必要となるため、半導体基板上に作り込むと容量を設ける面積が大きくなり、回路自体が大型化してしまう問題があった。
【0067】
そこで、本発明の実施の形態に係るPLL回路14では、スイッチトキャパシタフィルタ(SCF:Switched Capacitor Filter)を用いたループフィルタ42を採用している。図9は、本発明の実施の形態に係るPLL回路14のループフィルタ42の構成を示すブロック図および出力特性を示すグラフである。また、図10は、ループフィルタ42を構成する回路を示す回路図である。
【0068】
図9(a)に示すループフィルタ42は、ローパスフィルタ(LPF)回路42a、スイッチトキャパシタフィルタ42b、−26dBゲイン回路42c、および加算器42dを有している。
【0069】
ローパスフィルタ回路42aは、図10(a)に示すように、オペアンプO1、オペアンプO1の反転入力に接続した抵抗R3、オペアンプO1の反転入力と出力との間に並列に接続した抵抗R4、容量C3を有している。なお、抵抗R3は500kΩ、抵抗R4が5MΩ、容量C3が38pFである。
【0070】
スイッチトキャパシタフィルタ42bは、図10(b)に示すように、容量C4、容量C4の入力側に接続されたスイッチ素子S1,S2、容量C4の出力側に接続されたスイッチ素子S2,S4、スイッチ素子S4を反転入力に接続したオペアンプO2、オペアンプO2の反転入力と出力との間に並列に接続した容量C5を有している。なお、容量C4は160fF、容量C5は40pFである。
【0071】
加算器42dは、図10(c)に示すように、オペアンプO3、オペアンプO3の反転入力に接続した抵抗R5,R6,R7、オペアンプO3の反転入力と出力との間に並列に接続した抵抗R8,容量C6を有している。なお、抵抗R5、抵抗R7および抵抗R8は100kΩ、抵抗R6は2MΩ、容量C6は2pFである。加算器42dは、抵抗R5を介してスイッチトキャパシタフィルタ42bからの信号が入力1として抵抗R5から入力される。また、加算器42dは、抵抗R6および抵抗R8が−26dBゲイン回路42cを構成している。−26dBゲイン回路42cは、抵抗R6に入力する信号を入力2とし、ローパスフィルタ回路42aの出力信号に対してゲインが−26dB低下した信号を生成する。
【0072】
ループフィルタ42は、図9(a)および図10に示すように構成することで、図9(b)に示す折線Aのような周波数に対してゲインが変化するように調整してある。具体的に、周波数が4MHzまではゲインがαdBと一定で、周波数が4MHz〜80MHzはゲインがαdBからβdBへ変化し、80MHz〜840MHzはゲインがβdBと一定である。
【0073】
ループフィルタ42は、図9(b)に示すように周波数に対するゲインを調整することで、ラグ・リード型のループフィルタと同等の機能を実現することができ、ラグ・リード型のループフィルタと置き換えることが可能となる。図11は、スイッチトキャパシタフィルタ42bで構成したループフィルタ42と、ラグ・リード型のループフィルタとの周波数に対するゲインおよび位相の変化を示すグラフである。
【0074】
図11(a)に示すグラフは、横軸を周波数[Hz]、縦軸をゲイン[dB]として、スイッチトキャパシタフィルタ42bで構成したループフィルタ42と、ラグ・リード型のループフィルタとの周波数に対するゲインの変化を示している。なお、折線Cがスイッチトキャパシタフィルタ42bを採用したループフィルタ42を示し、折線Dがラグ・リード型のループフィルタを示しており、両者はほぼ同じ変化である。
【0075】
図11(b)に示すグラフは、横軸を周波数[Hz]、縦軸を位相[°]として、スイッチトキャパシタフィルタ42bで構成したループフィルタ42と、ラグ・リード型のループフィルタとの周波数に対する位相の変化を示している。なお、折線Eがスイッチトキャパシタフィルタ42bを採用したループフィルタ42を示し、折線Fがラグ・リード型のループフィルタを示しており、両者はほぼ同じ変化である。
【0076】
スイッチトキャパシタフィルタ42bで構成したループフィルタ42は、図11から分かるように、ラグ・リード型のループフィルタと同等の周波数に対するゲインおよび位相の変化を示している。なお、図11に示すグラフは、SPICE(Simulation Program with Integrated Circuit Emphasis)を用いて、スイッチトキャパシタフィルタ42bで構成したループフィルタ42およびラグ・リード型のループフィルタのシミュレーションした結果である。
【0077】
ループフィルタ42は、図10に示すように、容量C3〜容量C6が最大でも40pF以下と小さく、ラグ・リード型のループフィルタのように1μFの容量が不要である。そのため、ループフィルタ42は、ラグ・リード型のループフィルタのように容量を半導体基板上に形成することができずに外付けする必要はなく、半導体基板上に容量C3〜容量C6を形成することができる。つまり、ループフィルタ42を含むPLL回路14は、外付け部品を無くすことができる。
【0078】
以上のように、本発明の実施の形態に係る角速度検出装置は、駆動回路2のPLL回路14に、スイッチトキャパシタフィルタ42bで構成したループフィルタ42を用いるので、容量などの外付け部品が不要となり、小型化が可能となる。さらに、本発明の実施の形態に係る角速度検出装置は、外付け部品が不要となることで、外付け部品を実装する工程を省略することができるため、製造コストを安価にすることができる。
【0079】
今回開示された実施の形態はすべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上記した実施の形態ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。
【符号の説明】
【0080】
1 検出回路、2 駆動回路、3,22 増幅回路、4 タイミングコントローラ、5 デジタル変換回路、6 位相調整部、7 振幅調整部、11 電圧変換回路、12 駆動ノイズキャンセル回路、13,73 差分回路、14 PLL回路、15 同期検波回路、21 振幅検出回路、23 比較回路、24 減衰回路、25 2次LPF回路、26 移相回路、27,71 VGA回路、28 ドライバ1回路、29 ドライバ2回路、41 位相比較器、42 ループフィルタ、42a ローパスフィルタ回路、42b スイッチトキャパシタフィルタ、42c −26dBゲイン回路、42d 加算器、43 電圧制御発振器、44 分周器、61 演算部、62,68,74 パッド電極、63 位相遅延部、64,72 レジスタ部、65 反転部、66 ラッチ回路、67 切替部、100 振動子、110 基部、120 第1振動腕、130 第2振動腕、140 第1幅広部、142 圧電体、142a 第1主面、142b 第2主面、144 第1駆動電極、145,165 境界部、146 第2駆動電極、148 第1検出電極、152,154,172,174 モニタ電極、156 共通駆動電極、160 第2幅広部、164 第3駆動電極、166 第4駆動電極、168 第2検出電極、194 下部電極、196 半導体基板。
【特許請求の範囲】
【請求項1】
コリオリ力に応じた電気信号と、コリオリ力に応じて変化しない基準信号とを検出することが可能な振動子と、
前記振動子を駆動する駆動回路と、
前記振動子から検出した前記電気信号に対して予め定められた処理を行ない角速度を検出する検出回路と
を備える角速度検出装置であって、
前記検出回路は、前記振動子から検出した前記電気信号と前記基準信号との差分演算を行ない、前記電気信号から前記振動子に生じている不正振動によるノイズを除去する駆動ノイズキャンセル回路を有している、角速度検出装置。
【請求項2】
前記駆動ノイズキャンセル回路は、
前記電気信号の位相に対して前記基準信号の位相を調整する位相調整部と、
前記電気信号と前記基準信号と差分が小さくなるように、前記電気信号または前記基準信号のうち少なくとも一方の振幅を調整する振幅調整部とを有する、請求項1に記載の角速度検出装置。
【請求項3】
前記位相調整部は、
前記電気信号の位相に対する前記基準信号の位相をモニタするための第1パッド電極と、
前記第1パッド電極でモニタした前記電気信号の位相に対する前記基準信号の位相の差に基づき、前記基準信号の位相を調整する位相遅延部と有し、
前記振幅調整部は、
前記電気信号の振幅に対する前記基準信号の振幅をモニタするための第2パッド電極と、
前記第2パッド電極でモニタした前記電気信号と前記基準信号との差分に基づき、前記電気信号または前記基準信号のうち少なくとも一方の振幅を調整する振幅増幅部と有する、請求項2に記載の角速度検出装置。
【請求項4】
前記振動子は、音叉型振動子であり、
半導体基板に形成される基部と、
前記基部から延設され第1の幅を有する第1幅広部と、
前記第1幅広部と並行して設けられ前記基部から延設される第2幅広部と、
前記第1幅広部から延設し前記第1の幅よりも小さな第2の幅を有する第1幅狭部と、
前記第2幅広部から延設し前記第2の幅を有する第2幅狭部と
を有し、前記第1幅広部及び前記第2幅広部を振動させるための駆動信号を印加する駆動電極を前記第1幅広部及び前記第2幅広部に形成し、
前記第1幅広部に形成された強誘電体層に生じるコリオリ力に応じた前記電気信号を検出する第1の検出電極を前記第1幅広部に形成し、前記第2幅広部に形成された強誘電体層に生じるコリオリ力に応じた前記電気信号を検出する第2の検出電極を前記第2幅広部に形成し、
コリオリ力に応じて変化しない前記基準信号を検出するモニタ電極を前記第1幅狭部および前記第2幅狭部のうち少なくとも一方に形成する、請求項2又は請求項3に記載の角速度検出装置。
【請求項5】
前記位相調整部は、
前記モニタ電極で検出した前記基準信号の位相を反転させた反転基準信号を生成する位相反転部と、
前記第1の検出電極で検出した前記電気信号に対する差分演算の相手を、前記基準信号または前記反転基準信号の一方に切替え、前記第2の検出電極で検出した前記電気信号に対する差分演算の相手を、前記基準信号または前記反転基準信号の他方に切替える切替部と
を有する、請求項4に記載の角速度検出装置。
【請求項6】
前記振動子は、片持ち梁型振動子であり、
半導体基板に形成される基部と、
前記基部から延設され第1の幅を有する幅広部と、
前記幅広部から延設され前記第1の幅よりも幅が小さな第2の幅を有する幅狭部と
を有し、前記幅広部を振動させるための駆動信号を印加する駆動電極を前記幅広部に形成し、
前記幅広部に形成された強誘電体層に生じるコリオリ力に応じた前記電気信号を検出する検出電極を前記幅広部に形成し、
コリオリ力に応じて変化しない前記基準信号を検出するモニタ電極を前記幅狭部に形成する、請求項2又は請求項3に記載の角速度検出装置。
【請求項7】
前記駆動回路は、前記基準信号を入力信号とするPLL回路を備え、
前記PLL回路に、スイッチトキャパシタフィルタで構成したループフィルタを用いる、請求項1〜請求項6のいずれか1項に記載の角速度検出装置。
【請求項1】
コリオリ力に応じた電気信号と、コリオリ力に応じて変化しない基準信号とを検出することが可能な振動子と、
前記振動子を駆動する駆動回路と、
前記振動子から検出した前記電気信号に対して予め定められた処理を行ない角速度を検出する検出回路と
を備える角速度検出装置であって、
前記検出回路は、前記振動子から検出した前記電気信号と前記基準信号との差分演算を行ない、前記電気信号から前記振動子に生じている不正振動によるノイズを除去する駆動ノイズキャンセル回路を有している、角速度検出装置。
【請求項2】
前記駆動ノイズキャンセル回路は、
前記電気信号の位相に対して前記基準信号の位相を調整する位相調整部と、
前記電気信号と前記基準信号と差分が小さくなるように、前記電気信号または前記基準信号のうち少なくとも一方の振幅を調整する振幅調整部とを有する、請求項1に記載の角速度検出装置。
【請求項3】
前記位相調整部は、
前記電気信号の位相に対する前記基準信号の位相をモニタするための第1パッド電極と、
前記第1パッド電極でモニタした前記電気信号の位相に対する前記基準信号の位相の差に基づき、前記基準信号の位相を調整する位相遅延部と有し、
前記振幅調整部は、
前記電気信号の振幅に対する前記基準信号の振幅をモニタするための第2パッド電極と、
前記第2パッド電極でモニタした前記電気信号と前記基準信号との差分に基づき、前記電気信号または前記基準信号のうち少なくとも一方の振幅を調整する振幅増幅部と有する、請求項2に記載の角速度検出装置。
【請求項4】
前記振動子は、音叉型振動子であり、
半導体基板に形成される基部と、
前記基部から延設され第1の幅を有する第1幅広部と、
前記第1幅広部と並行して設けられ前記基部から延設される第2幅広部と、
前記第1幅広部から延設し前記第1の幅よりも小さな第2の幅を有する第1幅狭部と、
前記第2幅広部から延設し前記第2の幅を有する第2幅狭部と
を有し、前記第1幅広部及び前記第2幅広部を振動させるための駆動信号を印加する駆動電極を前記第1幅広部及び前記第2幅広部に形成し、
前記第1幅広部に形成された強誘電体層に生じるコリオリ力に応じた前記電気信号を検出する第1の検出電極を前記第1幅広部に形成し、前記第2幅広部に形成された強誘電体層に生じるコリオリ力に応じた前記電気信号を検出する第2の検出電極を前記第2幅広部に形成し、
コリオリ力に応じて変化しない前記基準信号を検出するモニタ電極を前記第1幅狭部および前記第2幅狭部のうち少なくとも一方に形成する、請求項2又は請求項3に記載の角速度検出装置。
【請求項5】
前記位相調整部は、
前記モニタ電極で検出した前記基準信号の位相を反転させた反転基準信号を生成する位相反転部と、
前記第1の検出電極で検出した前記電気信号に対する差分演算の相手を、前記基準信号または前記反転基準信号の一方に切替え、前記第2の検出電極で検出した前記電気信号に対する差分演算の相手を、前記基準信号または前記反転基準信号の他方に切替える切替部と
を有する、請求項4に記載の角速度検出装置。
【請求項6】
前記振動子は、片持ち梁型振動子であり、
半導体基板に形成される基部と、
前記基部から延設され第1の幅を有する幅広部と、
前記幅広部から延設され前記第1の幅よりも幅が小さな第2の幅を有する幅狭部と
を有し、前記幅広部を振動させるための駆動信号を印加する駆動電極を前記幅広部に形成し、
前記幅広部に形成された強誘電体層に生じるコリオリ力に応じた前記電気信号を検出する検出電極を前記幅広部に形成し、
コリオリ力に応じて変化しない前記基準信号を検出するモニタ電極を前記幅狭部に形成する、請求項2又は請求項3に記載の角速度検出装置。
【請求項7】
前記駆動回路は、前記基準信号を入力信号とするPLL回路を備え、
前記PLL回路に、スイッチトキャパシタフィルタで構成したループフィルタを用いる、請求項1〜請求項6のいずれか1項に記載の角速度検出装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2013−108890(P2013−108890A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2011−255086(P2011−255086)
【出願日】平成23年11月22日(2011.11.22)
【出願人】(000116024)ローム株式会社 (3,539)
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成23年11月22日(2011.11.22)
【出願人】(000116024)ローム株式会社 (3,539)
【Fターム(参考)】
[ Back to top ]