
触覚センサ及び力検出方法
【課題】 外部光の影響を受けずに正確に力を測定でき、且つ、センサの設置部の動きや変形にも対応可能な触覚センサ及び力検出装置を提供すること。
【解決手段】 外力が付与されると弾性変形する接触体11と、この接触体11内の所定部位に光を照射する発光部19と、接触体11内の光の受光部20と、当該受光部20で受光した光量に基づき、前記外力の大きさを求める力検出手段17とを備えて触覚センサ10が構成されている。発光部19は、所定のタイミングで点灯及び消灯を交互に繰り返し、力検出手段17は、発光部19の点灯時の光量から同消灯時の光量を減じた補正光量に基づいて外力を算出する。
【解決手段】 外力が付与されると弾性変形する接触体11と、この接触体11内の所定部位に光を照射する発光部19と、接触体11内の光の受光部20と、当該受光部20で受光した光量に基づき、前記外力の大きさを求める力検出手段17とを備えて触覚センサ10が構成されている。発光部19は、所定のタイミングで点灯及び消灯を交互に繰り返し、力検出手段17は、発光部19の点灯時の光量から同消灯時の光量を減じた補正光量に基づいて外力を算出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、触覚センサ及び力検出方法に係り、更に詳しくは、外部光の影響を受けずに正確な押圧力を測定可能な触覚センサ及び力検出方法に関する。
【背景技術】
【0002】
従来、光ファイバを用いた触覚センサが知られている(例えば、特許文献1等参照)。この触覚センサは、弾性変形可能なスポンジ状の触覚部と、この触覚部の内部に光を照射する投光用光ファイバと、触覚部内の光を受光する受光用光ファイバとを備えている。このような構成の触覚センサは、外力を受けて触覚部が収縮変形したときに、前記触覚部内の光の反射率が変わるため、当該外力の大きさに応じて触覚部内の光量が変化することになる。つまり、この触覚センサでは、触覚部に付与される外力が増大する程、触覚部内の光量が増大することになり、これによって、測定された光量から外力の大きさが求められることになる。
【特許文献1】特開平9−257609号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、前記触覚センサにあっては、外部光が触覚部の内部に透過する構造となっているため、触覚部の周囲の光の明暗によって、測定される光量が異なり、外力を正確に検出できないという不都合がある。
【0004】
ところで、前述した外部光の影響を低減させるには、触覚部の周囲を非透光性の金属材料等からなるカバーで覆う構造も考えられる。しかしながら、この構造では、少々の力ではカバーの変形が困難であり、例えば、人間型ロボットの関節部位に触覚センサを設置する場合等、触覚センサを設置する設置部が動くような場合、その動きに触覚センサが追従できなくなる。従って、このような触覚センサでは、設置部が動きや変形を伴う場合に、外力を正確に測定できないという不都合がある。
【0005】
本発明は、このような不都合に着目して案出されたものであり、その目的は、外部光の影響を受けずに正確に力を測定でき、且つ、センサの設置部の動きや変形にも対応可能な触覚センサ及び力検出装置を提供することにある。
【課題を解決するための手段】
【0006】
(1)前記目的を達成するため、本発明は、所定の外力が付与されると弾性変形する接触体と、この接触体内の所定部位に光を照射する発光部と、当該発光部からの光を前記所定部位で受光する受光部と、当該受光部で受光した光量に基づき、前記外力の大きさを求める力検出手段とを備えた触覚センサにおいて、
前記発光部は、所定のタイミングで点灯及び消灯を交互に繰り返し、
前記力検出手段は、前記発光部の点灯時の光量から前記発光部の消灯時の光量を減じた補正光量に基づいて、前記外力を算出する、という構成を採っている。
【0007】
(2)ここで、前記力検出手段は、所定時における前記点灯時の光量から、その直前の前記消灯時の光量を減じることにより補正光量を求める、という構成を採ることが好ましい。
【0008】
(3)また、本発明は、所定の外力が付与されると弾性変形する接触体内に光を照射し、当該接触体内の光量を測定することにより、当該光量に基づいて前記外力の大きさを求める力検出方法において、
前記光は、所定のタイミングで点灯及び消灯を交互に繰り返しながら接触体内に照射され、光の点灯時及び消灯時にそれぞれ前記光量を測定し、前記点灯時の光量から前記消灯時の光量を減じて補正光量を求め、当該補正光量に基づいて、前記外力を求める、という手法を採用している。
【0009】
(4)ここで、前記補正光量は、所定時における前記点灯時の光量から、その直前の前記消灯時の光量を減じることにより求める、という手法を採るとよい。
【発明の効果】
【0010】
前記(1)の構成によれば、発光部の点灯時の光量から、その消灯時の光量すなわち外部光の光量を除去することができ、外部光の影響を排除した状態で外力の測定を行うことができる。また、外部光の影響を排除するために、接触体の周囲を非透光性のカバー等で覆う必要がなくなり、接触体の部品点数を少なくして当該接触体の小型化を図ることができる。更に、接触体を覆うカバーが不要になるため、接触体の設置部に動きや変形があるような場合でも、接触体の弾性変形で難なく対応することができ、接触体の設置部の状態に拘らず、様々な設置部での外力の測定が可能になる。
【0011】
前記(2)のように構成することで、外部光の状態が刻々と変化するような場合でも、外部光の影響をキャンセルした正確な外力の測定が可能になる。
【0012】
前記(3)の手法によっても、接触体の設置部に動きや変形がある場合でも、外部光の影響を受けずに接触体に付与された力の測定を正確に行うことができる。
【発明を実施するための最良の形態】
【0013】
以下、本発明の実施例について図面を参照しながら説明する。
【実施例】
【0014】
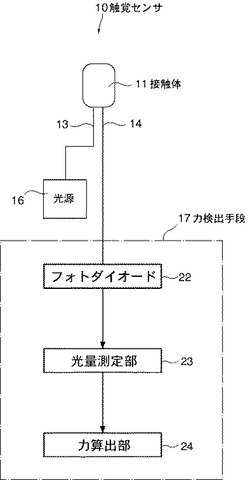
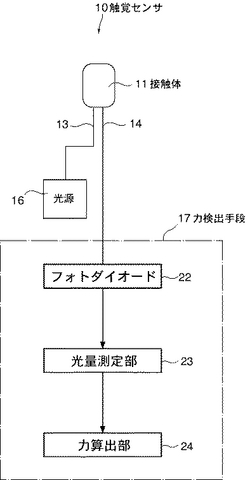
図1には、本実施例に係る触覚センサの概略構成図が示されている。この図において、触覚センサ10は、力の測定部位となる接触体11と、この接触体11に繋がる発光用光ファイバ13及び受光用光ファイバ14と、発光用光ファイバ13に繋がる光源16と、受光用光ファイバ14に繋がる力検出手段17とを備えて構成されている。
【0015】
前記接触体11は、ウレタンフォーム等の弾性材料によってスポンジ状に形成されており、表面に作用した外力によって収縮変形するようになっている。なお、接触体11の形状は特に限定されるものではないが、本実施例では、ほぼ直方体状となっている。
【0016】
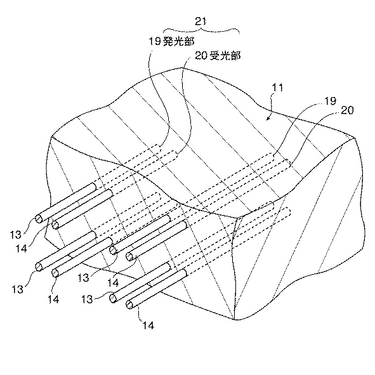
前記発光用光ファイバ13及び受光用光ファイバ14は、図2に示されるように、それぞれ一本を一組として、接触体11内の複数箇所に配置されており、各ファイバ13,14の先端は、それぞれ接触体11の内部に埋め込まれている。ここで、発光用光ファイバ13の先端は、光源16からの光を接触体11内に照射する発光部19となっている一方、受光用光ファイバ14の先端は、接触体11内の光の受光部20となっている。従って、接触体11内には、各一つの発光部19及び受光部20で構成される発受光部位21が複数箇所に点在することになる。
【0017】
前記光源16としては、例えば、発光ダイオードが用いられているが、発光部19から接触体11内に光を供給できる限りにおいて、レーザ光源等、他の光源を採用することもできる。この光源16は、所定のタイミングで交互に点灯と消灯を繰り返すように設定されており、各発光部19が同じタイミングで点灯及び消灯を繰り返すようになっている。なお、点灯及び消灯の切り替えタイミングは、任意に調節可能となっている。
【0018】
前記力検出手段17は、受光用光ファイバ14に繋がるフォトダイオード22と、このフォトダイオード22の電気信号から受光部20における光量を測定する光量測定部23と、この光量測定部23で測定された光量に基づいて、接触体11に作用した外力の大きさを求める力算出部24とを備えて構成されている。
【0019】
前記光量測定部23は、光源16の消灯時と点灯時とでそれぞれ各受光部20付近の光量を測定するようになっている。
【0020】
前記力算出部24は、所定時における光源16の点灯時の光量から、その直前における光源16の消灯時の光量を減算することで、前記点灯時の光量を補正し、当該補正後の光量(補正光量)に所定の定数を乗じる等の演算を行うことにより、受光部20の存在する接触体11の部位に作用した力の大きさが求められる。
【0021】
つまり、接触体11に付与される外力が増大すると、接触体11の内部領域の収縮度が増大するため、当該内部領域で、発光部19からの光の反射率が増大し、受光部20で検出される光量が増大することになる。しかしながら、このような外力と光量の対応関係は、接触体11の外部から内部に透過した外部光が加わると崩れてしまう。ところが、発光部19の消灯時に受光部20で検出された光量は、前記外部光の影響によるものであるから、当該消灯時の光量を発光部19の点灯時の光量から減ずることにより、前記外部光の影響がキャンセルされた発光部19からの光のみの補正光量が求められる。従って、この補正光量を使うことで、外部光の光量に関係なく、接触体11に付与された外力の大きさを正確に求めることができる。
【0022】
以上の手順は、各受発光部位21それぞれについて行われて、各受発光部位21付近に作用した外力の大きさが同時に求められ、力学的計算により、接触体11に作用した分布荷重が求められることになる。
【0023】
本実施例では、補正光量に所定の定数を乗じる等の演算により、接触体11に作用した力の大きさが求められるが、例えば、各光量に対する力の大きさを記憶したテーブルを使って、力の大きさを求めてもよい。
【0024】
また、接触体11の外部及び/又は内部の一部分に、発光部19からの光を受光部20に効率良く導く作用を奏する反射体を設けてもよい。この反射体としては、金属製の小片や可撓性を有する反射フィルム等を例示することができる。
【0025】
その他、本発明における装置各部の構成は図示構成例に限定されるものではなく、実質的に同様の作用を奏する限りにおいて、種々の変更が可能である。
【図面の簡単な説明】
【0026】
【図1】本実施例に係る触覚センサの概略構成図。
【図2】接触体の部分拡大断面斜視図。
【符号の説明】
【0027】
10 触覚センサ
11 接触体
17 力検出手段
19 発光部
20 受光部
【技術分野】
【0001】
本発明は、触覚センサ及び力検出方法に係り、更に詳しくは、外部光の影響を受けずに正確な押圧力を測定可能な触覚センサ及び力検出方法に関する。
【背景技術】
【0002】
従来、光ファイバを用いた触覚センサが知られている(例えば、特許文献1等参照)。この触覚センサは、弾性変形可能なスポンジ状の触覚部と、この触覚部の内部に光を照射する投光用光ファイバと、触覚部内の光を受光する受光用光ファイバとを備えている。このような構成の触覚センサは、外力を受けて触覚部が収縮変形したときに、前記触覚部内の光の反射率が変わるため、当該外力の大きさに応じて触覚部内の光量が変化することになる。つまり、この触覚センサでは、触覚部に付与される外力が増大する程、触覚部内の光量が増大することになり、これによって、測定された光量から外力の大きさが求められることになる。
【特許文献1】特開平9−257609号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、前記触覚センサにあっては、外部光が触覚部の内部に透過する構造となっているため、触覚部の周囲の光の明暗によって、測定される光量が異なり、外力を正確に検出できないという不都合がある。
【0004】
ところで、前述した外部光の影響を低減させるには、触覚部の周囲を非透光性の金属材料等からなるカバーで覆う構造も考えられる。しかしながら、この構造では、少々の力ではカバーの変形が困難であり、例えば、人間型ロボットの関節部位に触覚センサを設置する場合等、触覚センサを設置する設置部が動くような場合、その動きに触覚センサが追従できなくなる。従って、このような触覚センサでは、設置部が動きや変形を伴う場合に、外力を正確に測定できないという不都合がある。
【0005】
本発明は、このような不都合に着目して案出されたものであり、その目的は、外部光の影響を受けずに正確に力を測定でき、且つ、センサの設置部の動きや変形にも対応可能な触覚センサ及び力検出装置を提供することにある。
【課題を解決するための手段】
【0006】
(1)前記目的を達成するため、本発明は、所定の外力が付与されると弾性変形する接触体と、この接触体内の所定部位に光を照射する発光部と、当該発光部からの光を前記所定部位で受光する受光部と、当該受光部で受光した光量に基づき、前記外力の大きさを求める力検出手段とを備えた触覚センサにおいて、
前記発光部は、所定のタイミングで点灯及び消灯を交互に繰り返し、
前記力検出手段は、前記発光部の点灯時の光量から前記発光部の消灯時の光量を減じた補正光量に基づいて、前記外力を算出する、という構成を採っている。
【0007】
(2)ここで、前記力検出手段は、所定時における前記点灯時の光量から、その直前の前記消灯時の光量を減じることにより補正光量を求める、という構成を採ることが好ましい。
【0008】
(3)また、本発明は、所定の外力が付与されると弾性変形する接触体内に光を照射し、当該接触体内の光量を測定することにより、当該光量に基づいて前記外力の大きさを求める力検出方法において、
前記光は、所定のタイミングで点灯及び消灯を交互に繰り返しながら接触体内に照射され、光の点灯時及び消灯時にそれぞれ前記光量を測定し、前記点灯時の光量から前記消灯時の光量を減じて補正光量を求め、当該補正光量に基づいて、前記外力を求める、という手法を採用している。
【0009】
(4)ここで、前記補正光量は、所定時における前記点灯時の光量から、その直前の前記消灯時の光量を減じることにより求める、という手法を採るとよい。
【発明の効果】
【0010】
前記(1)の構成によれば、発光部の点灯時の光量から、その消灯時の光量すなわち外部光の光量を除去することができ、外部光の影響を排除した状態で外力の測定を行うことができる。また、外部光の影響を排除するために、接触体の周囲を非透光性のカバー等で覆う必要がなくなり、接触体の部品点数を少なくして当該接触体の小型化を図ることができる。更に、接触体を覆うカバーが不要になるため、接触体の設置部に動きや変形があるような場合でも、接触体の弾性変形で難なく対応することができ、接触体の設置部の状態に拘らず、様々な設置部での外力の測定が可能になる。
【0011】
前記(2)のように構成することで、外部光の状態が刻々と変化するような場合でも、外部光の影響をキャンセルした正確な外力の測定が可能になる。
【0012】
前記(3)の手法によっても、接触体の設置部に動きや変形がある場合でも、外部光の影響を受けずに接触体に付与された力の測定を正確に行うことができる。
【発明を実施するための最良の形態】
【0013】
以下、本発明の実施例について図面を参照しながら説明する。
【実施例】
【0014】
図1には、本実施例に係る触覚センサの概略構成図が示されている。この図において、触覚センサ10は、力の測定部位となる接触体11と、この接触体11に繋がる発光用光ファイバ13及び受光用光ファイバ14と、発光用光ファイバ13に繋がる光源16と、受光用光ファイバ14に繋がる力検出手段17とを備えて構成されている。
【0015】
前記接触体11は、ウレタンフォーム等の弾性材料によってスポンジ状に形成されており、表面に作用した外力によって収縮変形するようになっている。なお、接触体11の形状は特に限定されるものではないが、本実施例では、ほぼ直方体状となっている。
【0016】
前記発光用光ファイバ13及び受光用光ファイバ14は、図2に示されるように、それぞれ一本を一組として、接触体11内の複数箇所に配置されており、各ファイバ13,14の先端は、それぞれ接触体11の内部に埋め込まれている。ここで、発光用光ファイバ13の先端は、光源16からの光を接触体11内に照射する発光部19となっている一方、受光用光ファイバ14の先端は、接触体11内の光の受光部20となっている。従って、接触体11内には、各一つの発光部19及び受光部20で構成される発受光部位21が複数箇所に点在することになる。
【0017】
前記光源16としては、例えば、発光ダイオードが用いられているが、発光部19から接触体11内に光を供給できる限りにおいて、レーザ光源等、他の光源を採用することもできる。この光源16は、所定のタイミングで交互に点灯と消灯を繰り返すように設定されており、各発光部19が同じタイミングで点灯及び消灯を繰り返すようになっている。なお、点灯及び消灯の切り替えタイミングは、任意に調節可能となっている。
【0018】
前記力検出手段17は、受光用光ファイバ14に繋がるフォトダイオード22と、このフォトダイオード22の電気信号から受光部20における光量を測定する光量測定部23と、この光量測定部23で測定された光量に基づいて、接触体11に作用した外力の大きさを求める力算出部24とを備えて構成されている。
【0019】
前記光量測定部23は、光源16の消灯時と点灯時とでそれぞれ各受光部20付近の光量を測定するようになっている。
【0020】
前記力算出部24は、所定時における光源16の点灯時の光量から、その直前における光源16の消灯時の光量を減算することで、前記点灯時の光量を補正し、当該補正後の光量(補正光量)に所定の定数を乗じる等の演算を行うことにより、受光部20の存在する接触体11の部位に作用した力の大きさが求められる。
【0021】
つまり、接触体11に付与される外力が増大すると、接触体11の内部領域の収縮度が増大するため、当該内部領域で、発光部19からの光の反射率が増大し、受光部20で検出される光量が増大することになる。しかしながら、このような外力と光量の対応関係は、接触体11の外部から内部に透過した外部光が加わると崩れてしまう。ところが、発光部19の消灯時に受光部20で検出された光量は、前記外部光の影響によるものであるから、当該消灯時の光量を発光部19の点灯時の光量から減ずることにより、前記外部光の影響がキャンセルされた発光部19からの光のみの補正光量が求められる。従って、この補正光量を使うことで、外部光の光量に関係なく、接触体11に付与された外力の大きさを正確に求めることができる。
【0022】
以上の手順は、各受発光部位21それぞれについて行われて、各受発光部位21付近に作用した外力の大きさが同時に求められ、力学的計算により、接触体11に作用した分布荷重が求められることになる。
【0023】
本実施例では、補正光量に所定の定数を乗じる等の演算により、接触体11に作用した力の大きさが求められるが、例えば、各光量に対する力の大きさを記憶したテーブルを使って、力の大きさを求めてもよい。
【0024】
また、接触体11の外部及び/又は内部の一部分に、発光部19からの光を受光部20に効率良く導く作用を奏する反射体を設けてもよい。この反射体としては、金属製の小片や可撓性を有する反射フィルム等を例示することができる。
【0025】
その他、本発明における装置各部の構成は図示構成例に限定されるものではなく、実質的に同様の作用を奏する限りにおいて、種々の変更が可能である。
【図面の簡単な説明】
【0026】
【図1】本実施例に係る触覚センサの概略構成図。
【図2】接触体の部分拡大断面斜視図。
【符号の説明】
【0027】
10 触覚センサ
11 接触体
17 力検出手段
19 発光部
20 受光部
【特許請求の範囲】
【請求項1】
所定の外力が付与されると弾性変形する接触体と、この接触体内の所定部位に光を照射する発光部と、当該発光部からの光を前記所定部位で受光する受光部と、当該受光部で受光した光量に基づき、前記外力の大きさを求める力検出手段とを備えた触覚センサにおいて、
前記発光部は、所定のタイミングで点灯及び消灯を交互に繰り返し、
前記力検出手段は、前記発光部の点灯時の光量から前記発光部の消灯時の光量を減じた補正光量に基づいて、前記外力を算出することを特徴とする触覚センサ。
【請求項2】
前記力検出手段は、所定時における前記点灯時の光量から、その直前の前記消灯時の光量を減じることにより補正光量を求めることを特徴とする請求項1記載の触覚センサ。
【請求項3】
所定の外力が付与されると弾性変形する接触体内に光を照射し、当該接触体内の光量を測定することにより、当該光量に基づいて前記外力の大きさを求める力検出方法において、
前記光は、所定のタイミングで点灯及び消灯を交互に繰り返しながら接触体内に照射され、光の点灯時及び消灯時にそれぞれ前記光量を測定し、前記点灯時の光量から前記消灯時の光量を減じて補正光量を求め、当該補正光量に基づいて、前記外力を求めることを特徴とする力検出方法。
【請求項4】
前記補正光量は、所定時における前記点灯時の光量から、その直前の前記消灯時の光量を減じることにより求められることを特徴とする請求項3記載の力検出方法。
【請求項1】
所定の外力が付与されると弾性変形する接触体と、この接触体内の所定部位に光を照射する発光部と、当該発光部からの光を前記所定部位で受光する受光部と、当該受光部で受光した光量に基づき、前記外力の大きさを求める力検出手段とを備えた触覚センサにおいて、
前記発光部は、所定のタイミングで点灯及び消灯を交互に繰り返し、
前記力検出手段は、前記発光部の点灯時の光量から前記発光部の消灯時の光量を減じた補正光量に基づいて、前記外力を算出することを特徴とする触覚センサ。
【請求項2】
前記力検出手段は、所定時における前記点灯時の光量から、その直前の前記消灯時の光量を減じることにより補正光量を求めることを特徴とする請求項1記載の触覚センサ。
【請求項3】
所定の外力が付与されると弾性変形する接触体内に光を照射し、当該接触体内の光量を測定することにより、当該光量に基づいて前記外力の大きさを求める力検出方法において、
前記光は、所定のタイミングで点灯及び消灯を交互に繰り返しながら接触体内に照射され、光の点灯時及び消灯時にそれぞれ前記光量を測定し、前記点灯時の光量から前記消灯時の光量を減じて補正光量を求め、当該補正光量に基づいて、前記外力を求めることを特徴とする力検出方法。
【請求項4】
前記補正光量は、所定時における前記点灯時の光量から、その直前の前記消灯時の光量を減じることにより求められることを特徴とする請求項3記載の力検出方法。
【図1】


【図2】
【図2】
【公開番号】特開2006−189406(P2006−189406A)
【公開日】平成18年7月20日(2006.7.20)
【国際特許分類】
【出願番号】特願2005−3261(P2005−3261)
【出願日】平成17年1月7日(2005.1.7)
【出願人】(899000068)学校法人早稲田大学 (602)
【公開日】平成18年7月20日(2006.7.20)
【国際特許分類】
【出願日】平成17年1月7日(2005.1.7)
【出願人】(899000068)学校法人早稲田大学 (602)
[ Back to top ]