
触覚フィードバックにより特有の動きを模擬する方法および該方法を実行する装置
本発明は仮想車両の動きを模擬する方法に関し、使用者は力フィードバック触覚インターフェースを含むシミュレータに物理的に接触し、該物理的な接点は、触覚インターフェースおよび使用者の体の間の少なくとも1つの物理的な接点に対応し、使用者および仮想車両の間の仮想接点を表す。方法は少なくとも2つのステップを備える。第1ステップ(101)は、仮想接点における直線加速度ベクトル(式I)および直線速度ベクトル(式II)を決定するステップを含み、前記ベクトルは、接点における車両の動きを表す。第2ステップ(102)は、直線加速度ベクトル(式I)および直線速度ベクトル(式II)から三次元力ベクトル(式III)を推定するステップを含み、力ベクトルは、直線加速および速度ベクトルの線形結合によって定められ、対応する力は、触覚インターフェースを介し実質的に物理的な接点に加えられる。本発明はまた車両の動きを模擬する装置に関する。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、触覚フィードバックにより動きを模擬する方法および方法を実行する装置に関連する。これは、動作シミュレーションおよび認識の分野に特に適用できる。本発明は、例えば自動車または航空機シミュレータ、テレビゲーム、テーマパークのアトラクション、または例えば映画館のような観客席において実行されることができる。
【0002】
ある物自体の動きの認識は、特に人間においては、いくつかのモードが含まれる複合機構の結果である。含まれるモードは、特に接触、聴覚、視覚、固有受容感覚、および前庭器官である。以下の説明においては、触覚モードは、接触および固有受容感覚モードの合成として形成される。1つのモードで動作することにより、動かない、または実質的に動かない人に動いている印象を持たせる可能性がある。またその印象を強化するためにいくつかのモードを同時に刺激することが可能である。そのためには、多様な認識機構が例えば非特許文献1など、多くの研究の主題となっている。
【背景技術】
【0003】
現在、人に動いている印象を与える目的の機械的な刺激に基づく3つの主な手法がある。視覚を刺激するために、同時に視覚的なシーンが通常スクリーンに投影される。
【0004】
第1の手法の原理は、使用者に振動を伝達するところにある。「使用者」という言葉は、以降動作模擬装置を使用し、それにより動いている印象を感じることが可能な任意の個人を示す。前記使用者が座席に座っている場合、1つまたは複数の振動装置は、その座席の下に配置されることができ、かつ動いている印象の伝達が決定される場合に作動される。この手法は、3つの手法の中で最も基本であるり、また実行するのに一番安価である。実際、振動装置を制御可能にする信号は、単純であり、かつ振動の周波数帯は制限される。一方、このような手法は、加速している印象を与えることができない。
【0005】
第2の手法は、油圧ジャッキの使用に基づく。この手法を用いたシミュレータは、通常ジャッキ駆動のプラットフォームに固定された運転室で構成され、使用者は運転室の中にいる。ジャッキの制御により、運転室を傾けることが可能となり、それにより動いている印象を与えることができる。振動装置の使用に基づく手法とは異なり、加速している印象を伝達することができるが、断続的である。さらに、このタイプの手法は著しく実行費用がかかる。
【0006】
やはり高価な第3の手法においては、レールが運転室または運転中に使用者が位置する座席を定めるために使用される。使用するレールの制限された大きさにより、この手法は、短期間の加速している印象を与えることが可能になる。この方法に関連する制限は、動作の模擬がリアルタイムではないということである。実際、模擬された動きの軌跡に特に関連する計算は、レールの上の運転室または動く座席を設定する前に行わなければならない。さらに、この手法の実施には、大きい設備が必要となる。
【先行技術文献】
【非特許文献】
【0007】
【非特許文献1】O. Ernst 及び M. S. Banks 著 「Human integrate visual and haptic information in a statistically optimal fashion」, Nature, Vol. 415, 2002年1月
【発明の概要】
【発明が解決しようとする課題】
【0008】
これら3つの手法に共通の制限は、長くかつ連続的な加速している印象を伝達することができないということである。
【0009】
本発明の1つの目的は、特に前述の欠点を補うことである。
【課題を解決するための手段】
【0010】
そのために、本発明は、仮想車両の動きを模擬する方法に関連し、使用者は力フィードバック触覚インターフェースを含むシミュレータに物理的に接触し、前記物理的な接点は、触覚インターフェースおよび使用者の体の間の少なくとも1つの物理的な接点に対応し、それは使用者および仮想車両の間の仮想接点を表す。この方法は、少なくとも2つのステップを備える。第1のステップは、使用者および仮想車両の間の仮想接点における直線加速度ベクトル<alin>(ベクトルalinを<alin>と表す。以下同様)および直線速度ベクトル<vlin>を決定するステップを含み、前記ベクトルは、前記接点における車両の動きを表す。第2のステップは、直線加速度<alin>ベクトルおよび直線速度ベクトル<vlin>から三次元の力ベクトル<F3D>を推定するステップを含み、前記力ベクトルは、前記直線加速度および速度ベクトルの線形結合によって予め定められ、対応する力は、触覚インターフェースを介して実質的に物理的な接点に加えられる。
【0011】
本発明の1つの態様によると、力<F3D>は、直線加速度の累乗、直線速度の累乗および直線加速度の時間微分の累乗の線形結合から推定されることができる。
【0012】
本発明の1つの態様によると、方法は、使用者および触覚インターフェースの間の仮想接点における角加速度ベクトル<aang>を決定するためのステップを備え、前記ベクトルは、前記仮想接点における車両の動きを表す。
【0013】
方法は、例えば角加速度ベクトル<aang>から三次元トルクベクトル<C3D>を推定するステップを備え、前記トルクベクトルは、前記加速度ベクトルに比例し、かつ対応するトルクが触覚インターフェースによって実質的に物理的な接点に加えられる。
【0014】
力<F3D>は、例えば以下の式を満たす。
【数1】
ここで、
<alin>は、三次元で定められた直線加速度ベクトル
αは、設定可能な実係数
mは、模擬車両の質量
である。
【0015】
一実施形態において、トルク<c3D>は、以下の式を満たす。
【数2】
ここで、
<aang>は、三次元で表される角加速度ベクトル
βは、正または負の値を取り得る設定可能な実係数
Iは、模擬車両の慣性モーメント
である。
【0016】
一実施形態において、触覚インターフェースおよび使用者の間の物理的な接点は、仮想車両との固定支持点に対応する。
【0017】
他の実施形態において、触覚インターフェースおよび使用者の間の物理的な接点は、仮想車両の制御機器との仮想接点に対応する。
【0018】
本発明はまた、仮想車両の動きを模擬する装置に関連し、使用者は、力フィードバック触覚インターフェースを備える装置に物理的に接触し、前記物理的な接点は、触覚インターフェースおよび使用者の体の間の少なくとも1つの物理的な接点に対応し、それは、使用者および仮想車両の間の仮想接点を表す。前記装置は、使用者および仮想車両の間の仮想接点における直線加速度ベクトル<alin>および直線速度ベクトル<vlin>を決定する手段であって、前記ベクトルが前記接点における仮想車両の動きを表す、手段と、直線加速度ベクトル<alin>および速度ベクトル<vlin>から三次元力ベクトル<F3D>を推定する手段であって、前記力ベクトルが前記直線加速度および速度ベクトルの線形結合によって決定され、対応する力が触覚インターフェースによって実質的に接点に加えられる、手段と、を備える。
【0019】
本発明の一実施形態において、力は、直線加速度の累乗、直線速度の累乗および直線加速度の時間微分の累乗の線形結合から推定される。
【0020】
1つの実施形態によると、装置は、使用者および触覚インターフェース間の接点における角加速度ベクトルを決定する手段を備え、前記ベクトルは、前記接点における車両の動きを表す。
【0021】
装置は、例えば角加速度ベクトルから三次元トルクベクトルを推定する手段を備え、前記トルクベクトルは、前記加速度ベクトルに比例し、かつ対応するトルクが触覚インターフェースによって実質的に接点に加えられる。
【0022】
1つの実施形態によると、触覚インターフェースは、使用者の体との接点として使用される柄を備える力フィードバックアームである。
【0023】
他の実施形態によると、触覚インターフェースは、使用者の体との接点として使用される力フィードバックハンドルを備える力フィードバックアームである。
【0024】
装置は、例えばビデオ画像の一連のシーンを使用者に投影する手段を備え、前記一連のシーンは、車両の模擬された動きを表す。
【0025】
本発明は、特に体積が著しく大きくなることなく実行されることができるという決定的な利点を有する。さらに、リアルタイムシミュレーションにおいて使用することができる。
【0026】
本発明の他の特徴および利点は、情報として提供され、添付図面を踏まえて非限定的になされた以下の説明によって明らかになるだろう。
【図面の簡単な説明】
【0027】
【図1】本発明による動作模擬方法を示す。
【図2】本発明による方法を実行する模擬装置の例を示す。
【図3】力フィードバックハンドルに関連した力フィードバックアームの例を示す。
【発明を実施するための形態】
【0028】
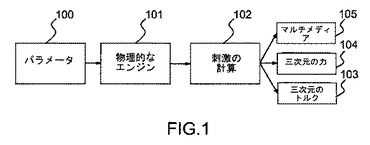
図1は、本発明による動作模擬方法を示す。方法は、特に、例えば力フィードバックを有する触覚インターフェースを制御することが可能となる。動いている感覚は、前記触覚インターフェースによって刺激を受ける使用者に送信される。
【0029】
力フィードバック触覚インターフェースは、例えばスクリーン上で視覚的に認識される動作に関連する物理的な感覚を再構成するために通常使用される。そのためには、触覚インターフェースは、少なくとも1つの機械的な装置に位置し、いわゆるフィードバック力をインターフェースの使用者に伝達することが可能となる。
【0030】
車両、ボート、または航空機の動作シミュレーション分野において、力フィードバックハンドルまたは握りは、触覚インターフェースとして使用されることができる。駆動に関連する抵抗効果は、潜在的に使用者によって感じられることができる。以下の説明において、「車両」という言葉は、少なくとも一人の使用者を収容することが可能な任意の移動装置に使用され、かつ称される。
【0031】
本発明による方法は、3つのステップ、例えば事前ステップおよび2つのメインステップに分けることができる。
【0032】
事前構成ステップ100は、車両シミュレーションのタイプおよびその特性を規定することを可能にする。したがって車両が動く環境は明確に定義される。模擬車両が鉄道車両の場合、使用する鉄道の行程およびタイプを選択することができる。また使用する地形のタイプ、例えば起伏のある地形、を構成することが可能である。他の要素およびそれらの特性、例えば模擬車両の仮想移動空間における空のタイプまたは海の有無およびその位置もまた選択することができる。
【0033】
この構成ステップ100はまた、以降の説明において仮想車両と呼ばれる模擬車両のタイプを選択することを可能にする。例えば、列車、自転車、自動車、航空機、またはボートを選択することができる。車両は、また例えば歩行タイプの動きを模擬するように人間に対応させることができる。またこの構成ステップ100において、仮想接点および仮想車両の間の強固な、または強固でない連結タイプを決定することができる。仮想接点は、ハンドル、バスの棒、ワゴンに取り付けられたロープ、または使用者に接触することがある仮想車両の任意の他の部分などの使用者が事実上相互作用するようになっている仮想車両の一部として形成される。以降の説明において、物理的な接点は、使用者との実際の接触に使用される触覚インターフェースの一部として形成される。
【0034】
第1のメインステップ101において、物理的なエンジンが最先端の技術における既存の方法を使用して三次元空間における模擬車両の仮想の動きを分析し、かつ車両の動きによって触覚インターフェースと接触する体の一部に生じる直線加速度ベクトルおよび角加速度ベクトルを決定し、前記ベクトルは、三次元空間で表される。物理的なエンジンは、また車両の速度を推定することができる。この推定は、車両の残りの部分との仮想接点の強固な、または強固でない連結の態様を考慮することができ、仮想接点における直線加速度および角加速度が決定される。物理的なエンジンはまた車両の角速度<vlin>および<vang>を推定することができる。
【0035】
第2のメインステップ102において、触覚インターフェースを制御するように刺激コマンドが計算される103,104。実際、仮想接点における直線および角加速度ベクトルは、実質的に物理的な接点に対して加えられる力およびトルクに変換され、それに従い触覚インターフェースに接触する体の一部は刺激され、前記ベクトルは三次元で表される。他のコマンド105はまた、例えばマルチメディアタイプの他の機器を制御するようにエンジンによって決定されることができる。前記マルチディア機器は、例えば使用者のために意図された車両の動きを表す音と共にスクリーン上に画像の一連のシーンを投影することができる。環境に存在する音などもまた放送することができる。
【0036】
所与の実施形態において、模擬車両をマルチメディア機器に視覚的に表すことはできないが、触覚インターフェースにおいて模擬されるその動きは表すことはでき、このモードは、好都合にナビゲーション用途において使用されることがでる。したがって使用者は、例えば動いているような錯覚を感じながら仮想都市で移動することができる。
【0037】
触覚インターフェースは、少なくとも1つの点にて使用者と接触し、かつその点は、車両に強固に連結された支持点、または強固でない接点、例えば制御ハンドル、または車のハンドルなどの前記車両の制御機器、またはロープなど車両に取り付けられた要素のいずれかに対応する。触覚インターフェースおよび使用者の間の接点は、車両内の使用者の仮想支持点に対応させることができ、車両の残りの部分と摩擦を伴う、または伴わない粘弾性の連結を有する。
【0038】
方法の第3のステップを実行する間、フィードバック力およびトルクは、例えば手などの使用者の体における触覚インターフェースとの物理的な接点に加えられるように決定される。いくつかの物理的な接点がある場合、これら各点の力およびトルクを決定することができる。この力104およびこのトルク103は、三次元であり、かつ事前ステップにおいて決定された直線加速度および角加速度ベクトルにそれぞれ比例する。
【0039】
フィードバックの力<F3D>、すなわち力フィードバック触覚インターフェースによって加えられる力は、以下の式による三次元ベクトルによって表される。
【数3】
ここで、
<alin>は、三次元で表される仮想接点における直線加速度ベクトル
αは、設定可能な実係数
mは、車両の質量
である。
【0040】
係数αは、正または負とすることができる。これは、力<F3D>は、加速度<alin>と同じ方向または反対方向とすることができることを意味する。αを広くパラメータ化し、それにしたがい力<F3D>の方向および強度を選択することにより、使用者にシミュレーションを適合させることができる。
【0041】
力フィードバックアームが触覚インターフェースとして使用される場合、力<F3D>を前記アームの剛性係数に応じて以下の式を使って表すことができる。
【数4】
ここで、
krは、アームの剛性係数
<λ>は、力フィードバックアームの動きを表す三次元ベクトル
である。
【0042】
式(1)および(2)を使い、係数αと<λ>を以下の式により関連させることができる。
【数5】
特にこの式は、係数αを使用される力フィードバックアームの特性に調整することができる。
【0043】
1つの代替の実施形態において、力は、以下の式により加速度<alin>、直線速度<vlin>および直線加速度の導関数<J>の線形結合から推定されることができる。
【数6】
ここで、
α’は、第2の設定可能な実係数
α”は、第3の設定可能な実係数
<J>は、通常アングロサクソン表現では「jerk」と称される、直線加速度ベクトルの時間微分を表すベクトル
である。
【0044】
本発明の1つの代替の実施形態において、力<F3D>を直線加速度の累乗、直線速度の累乗、および直線加速度の時間微分の累乗の線形結合で表すことができる。また力<F3D>は、例えば曲率半径または前記車両の位置などの車両の軌跡情報を使用して決定されることができる。
【0045】
前に説明したように、方法の第2のメインステップ102は、触覚インターフェースとの物理的な接点において使用者の体に適用されるフィードバックの力およびトルクを決定する。トルクは、実質的に力<F3D>の印加点に加えられ、以下の式を用いて表される。
【数7】
ここで、
<aang>は、三次元で表される仮想接点における角加速度ベクトル
βは、正または負の値を取り得る設定可能な実係数
Iは、模擬車両の慣性モーメント
<r>は、<C3D>と同じ方向の単位回転ベクトル
である。
【0046】
またトルク<C3D>は、以下の式を用いて表すこともできる。
【数8】
ここで、
τは、力フィードバックアームのねじれ定数
θは、動く角度
である。
【0047】
以下の式を用いてθを係数βと関連づけることができる。
【数9】
したがって式(7)により、係数βを使用する触覚インターフェースの特性に調整することができる。
【0048】
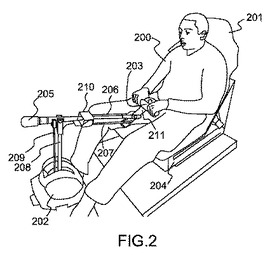
図2は、本発明による方法を実行するシミュレーション装置の例を提供する。この例において、使用者200は、模擬車両にあるものを表す座席201に座っている。記憶回路に関連したマイクロプロセッサーなどの計算手段を、前述した本発明による方法とは異なるステップを実行するために使用することができる。前記手段は、例えば座席201の基部204に配置されることができる。1つまたは複数のマルチメディア機器を使用することができる。例えば、座席201の前にスクリーンを配置することができ、前記座席の周囲に配置された複数の音響の囲いを配置することができ、これらのマルチメディア機器は、図に示されていない。マルチメディア情報は、また例えば可搬型のマルチメディア機器であるhmdタイプの頭部装着型ディスプレイに送信されることができる。この例において使用される触覚インターフェースは、力フィードバックアームである。それは、基軸と呼ばれる2つの平行な機械軸208,209に接続された基部で構成され、前記軸は、2つの軸が枢動移動の間平行を保ったまま、基部に位置する回転軸の周りに同じ平面内で枢動することができる。基軸の第1端部は、基部に接続され、かつ第2端部は、主軸205と呼ばれる機械軸に接続される。基軸の移動により、主軸の2次元の回転運動を引き起こすことができる。主軸は、3つの副軸205,206,207およびエンジンブロック210を備える。第1の副軸205は、基軸208,209に接続され、かつその端部の1つは、エンジンブロック210に接続され、前記ブロックは、第1の副軸205に対して固定される。エンジンブロックはまた、柄の副軸と呼ばれる、主軸の他の2つの副軸206,207に接続される。エンジンブロックにより、3つの副軸206,207,205が同じ方向を保ちながら、前記2つの副軸に対して回転および並進移動を生じさせることができる。柄は、2つの柄の副軸203に接続される。柄は、例えば前記副軸および接触部分203に接続されたアーム211で構成され、操作員は、例えば両手で握ることによって前記部分に接触する。したがって異なる軸の制御された動きにより、力およびトルクを柄に伝動させることができる。
【0049】
前述の刺激コマンドを用いて制御された力フィードバックアームにより、動いている印象を使用者に伝えることができる。触覚刺激を与えている間、使用者は、使用者が受ける力およびトルクに抵抗するよう意図されている。したがって、使用者が感じる、動いている印象の時間に理論上の制限はない。
【0050】
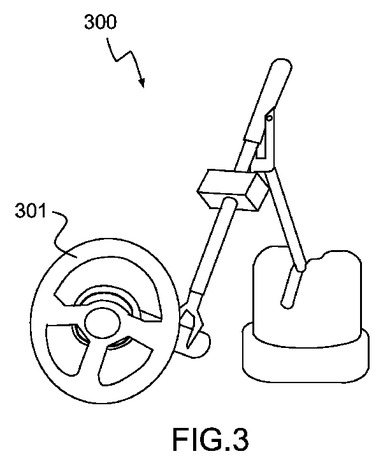
図3は、力フィードバックハンドルに関連した力フィードバックアームの例を提供する。力フィードバックアーム300は、柄に対応する部分以外は図2を用いて説明されたものと類似している。実際、力フィードバックハンドル301を使用することは可能である。アームの他の要素と組み合わせて、3次元に移動可能なハンドルが可能となり、その軸は、ハンドルに固定された軸のみではなく、三次元の回転軸である。実際、自動車の場合は、例えば傾斜した道を曲がる際にドライバーの手が受けるトルクは、ハンドルの軸上にある必要はない。
【符号の説明】
【0051】
100 構成ステップ
101 第1のメインステップ
102 第2のメインステップ
103 トルク
104 力
200 使用者
201 座席
204 基部
205,206,207 副軸
208,209 機械軸
211 アーム
300 力フィードバックアーム
301 ハンドル
【技術分野】
【0001】
本発明は、触覚フィードバックにより動きを模擬する方法および方法を実行する装置に関連する。これは、動作シミュレーションおよび認識の分野に特に適用できる。本発明は、例えば自動車または航空機シミュレータ、テレビゲーム、テーマパークのアトラクション、または例えば映画館のような観客席において実行されることができる。
【0002】
ある物自体の動きの認識は、特に人間においては、いくつかのモードが含まれる複合機構の結果である。含まれるモードは、特に接触、聴覚、視覚、固有受容感覚、および前庭器官である。以下の説明においては、触覚モードは、接触および固有受容感覚モードの合成として形成される。1つのモードで動作することにより、動かない、または実質的に動かない人に動いている印象を持たせる可能性がある。またその印象を強化するためにいくつかのモードを同時に刺激することが可能である。そのためには、多様な認識機構が例えば非特許文献1など、多くの研究の主題となっている。
【背景技術】
【0003】
現在、人に動いている印象を与える目的の機械的な刺激に基づく3つの主な手法がある。視覚を刺激するために、同時に視覚的なシーンが通常スクリーンに投影される。
【0004】
第1の手法の原理は、使用者に振動を伝達するところにある。「使用者」という言葉は、以降動作模擬装置を使用し、それにより動いている印象を感じることが可能な任意の個人を示す。前記使用者が座席に座っている場合、1つまたは複数の振動装置は、その座席の下に配置されることができ、かつ動いている印象の伝達が決定される場合に作動される。この手法は、3つの手法の中で最も基本であるり、また実行するのに一番安価である。実際、振動装置を制御可能にする信号は、単純であり、かつ振動の周波数帯は制限される。一方、このような手法は、加速している印象を与えることができない。
【0005】
第2の手法は、油圧ジャッキの使用に基づく。この手法を用いたシミュレータは、通常ジャッキ駆動のプラットフォームに固定された運転室で構成され、使用者は運転室の中にいる。ジャッキの制御により、運転室を傾けることが可能となり、それにより動いている印象を与えることができる。振動装置の使用に基づく手法とは異なり、加速している印象を伝達することができるが、断続的である。さらに、このタイプの手法は著しく実行費用がかかる。
【0006】
やはり高価な第3の手法においては、レールが運転室または運転中に使用者が位置する座席を定めるために使用される。使用するレールの制限された大きさにより、この手法は、短期間の加速している印象を与えることが可能になる。この方法に関連する制限は、動作の模擬がリアルタイムではないということである。実際、模擬された動きの軌跡に特に関連する計算は、レールの上の運転室または動く座席を設定する前に行わなければならない。さらに、この手法の実施には、大きい設備が必要となる。
【先行技術文献】
【非特許文献】
【0007】
【非特許文献1】O. Ernst 及び M. S. Banks 著 「Human integrate visual and haptic information in a statistically optimal fashion」, Nature, Vol. 415, 2002年1月
【発明の概要】
【発明が解決しようとする課題】
【0008】
これら3つの手法に共通の制限は、長くかつ連続的な加速している印象を伝達することができないということである。
【0009】
本発明の1つの目的は、特に前述の欠点を補うことである。
【課題を解決するための手段】
【0010】
そのために、本発明は、仮想車両の動きを模擬する方法に関連し、使用者は力フィードバック触覚インターフェースを含むシミュレータに物理的に接触し、前記物理的な接点は、触覚インターフェースおよび使用者の体の間の少なくとも1つの物理的な接点に対応し、それは使用者および仮想車両の間の仮想接点を表す。この方法は、少なくとも2つのステップを備える。第1のステップは、使用者および仮想車両の間の仮想接点における直線加速度ベクトル<alin>(ベクトルalinを<alin>と表す。以下同様)および直線速度ベクトル<vlin>を決定するステップを含み、前記ベクトルは、前記接点における車両の動きを表す。第2のステップは、直線加速度<alin>ベクトルおよび直線速度ベクトル<vlin>から三次元の力ベクトル<F3D>を推定するステップを含み、前記力ベクトルは、前記直線加速度および速度ベクトルの線形結合によって予め定められ、対応する力は、触覚インターフェースを介して実質的に物理的な接点に加えられる。
【0011】
本発明の1つの態様によると、力<F3D>は、直線加速度の累乗、直線速度の累乗および直線加速度の時間微分の累乗の線形結合から推定されることができる。
【0012】
本発明の1つの態様によると、方法は、使用者および触覚インターフェースの間の仮想接点における角加速度ベクトル<aang>を決定するためのステップを備え、前記ベクトルは、前記仮想接点における車両の動きを表す。
【0013】
方法は、例えば角加速度ベクトル<aang>から三次元トルクベクトル<C3D>を推定するステップを備え、前記トルクベクトルは、前記加速度ベクトルに比例し、かつ対応するトルクが触覚インターフェースによって実質的に物理的な接点に加えられる。
【0014】
力<F3D>は、例えば以下の式を満たす。
【数1】
ここで、
<alin>は、三次元で定められた直線加速度ベクトル
αは、設定可能な実係数
mは、模擬車両の質量
である。
【0015】
一実施形態において、トルク<c3D>は、以下の式を満たす。
【数2】
ここで、
<aang>は、三次元で表される角加速度ベクトル
βは、正または負の値を取り得る設定可能な実係数
Iは、模擬車両の慣性モーメント
である。
【0016】
一実施形態において、触覚インターフェースおよび使用者の間の物理的な接点は、仮想車両との固定支持点に対応する。
【0017】
他の実施形態において、触覚インターフェースおよび使用者の間の物理的な接点は、仮想車両の制御機器との仮想接点に対応する。
【0018】
本発明はまた、仮想車両の動きを模擬する装置に関連し、使用者は、力フィードバック触覚インターフェースを備える装置に物理的に接触し、前記物理的な接点は、触覚インターフェースおよび使用者の体の間の少なくとも1つの物理的な接点に対応し、それは、使用者および仮想車両の間の仮想接点を表す。前記装置は、使用者および仮想車両の間の仮想接点における直線加速度ベクトル<alin>および直線速度ベクトル<vlin>を決定する手段であって、前記ベクトルが前記接点における仮想車両の動きを表す、手段と、直線加速度ベクトル<alin>および速度ベクトル<vlin>から三次元力ベクトル<F3D>を推定する手段であって、前記力ベクトルが前記直線加速度および速度ベクトルの線形結合によって決定され、対応する力が触覚インターフェースによって実質的に接点に加えられる、手段と、を備える。
【0019】
本発明の一実施形態において、力は、直線加速度の累乗、直線速度の累乗および直線加速度の時間微分の累乗の線形結合から推定される。
【0020】
1つの実施形態によると、装置は、使用者および触覚インターフェース間の接点における角加速度ベクトルを決定する手段を備え、前記ベクトルは、前記接点における車両の動きを表す。
【0021】
装置は、例えば角加速度ベクトルから三次元トルクベクトルを推定する手段を備え、前記トルクベクトルは、前記加速度ベクトルに比例し、かつ対応するトルクが触覚インターフェースによって実質的に接点に加えられる。
【0022】
1つの実施形態によると、触覚インターフェースは、使用者の体との接点として使用される柄を備える力フィードバックアームである。
【0023】
他の実施形態によると、触覚インターフェースは、使用者の体との接点として使用される力フィードバックハンドルを備える力フィードバックアームである。
【0024】
装置は、例えばビデオ画像の一連のシーンを使用者に投影する手段を備え、前記一連のシーンは、車両の模擬された動きを表す。
【0025】
本発明は、特に体積が著しく大きくなることなく実行されることができるという決定的な利点を有する。さらに、リアルタイムシミュレーションにおいて使用することができる。
【0026】
本発明の他の特徴および利点は、情報として提供され、添付図面を踏まえて非限定的になされた以下の説明によって明らかになるだろう。
【図面の簡単な説明】
【0027】
【図1】本発明による動作模擬方法を示す。
【図2】本発明による方法を実行する模擬装置の例を示す。
【図3】力フィードバックハンドルに関連した力フィードバックアームの例を示す。
【発明を実施するための形態】
【0028】
図1は、本発明による動作模擬方法を示す。方法は、特に、例えば力フィードバックを有する触覚インターフェースを制御することが可能となる。動いている感覚は、前記触覚インターフェースによって刺激を受ける使用者に送信される。
【0029】
力フィードバック触覚インターフェースは、例えばスクリーン上で視覚的に認識される動作に関連する物理的な感覚を再構成するために通常使用される。そのためには、触覚インターフェースは、少なくとも1つの機械的な装置に位置し、いわゆるフィードバック力をインターフェースの使用者に伝達することが可能となる。
【0030】
車両、ボート、または航空機の動作シミュレーション分野において、力フィードバックハンドルまたは握りは、触覚インターフェースとして使用されることができる。駆動に関連する抵抗効果は、潜在的に使用者によって感じられることができる。以下の説明において、「車両」という言葉は、少なくとも一人の使用者を収容することが可能な任意の移動装置に使用され、かつ称される。
【0031】
本発明による方法は、3つのステップ、例えば事前ステップおよび2つのメインステップに分けることができる。
【0032】
事前構成ステップ100は、車両シミュレーションのタイプおよびその特性を規定することを可能にする。したがって車両が動く環境は明確に定義される。模擬車両が鉄道車両の場合、使用する鉄道の行程およびタイプを選択することができる。また使用する地形のタイプ、例えば起伏のある地形、を構成することが可能である。他の要素およびそれらの特性、例えば模擬車両の仮想移動空間における空のタイプまたは海の有無およびその位置もまた選択することができる。
【0033】
この構成ステップ100はまた、以降の説明において仮想車両と呼ばれる模擬車両のタイプを選択することを可能にする。例えば、列車、自転車、自動車、航空機、またはボートを選択することができる。車両は、また例えば歩行タイプの動きを模擬するように人間に対応させることができる。またこの構成ステップ100において、仮想接点および仮想車両の間の強固な、または強固でない連結タイプを決定することができる。仮想接点は、ハンドル、バスの棒、ワゴンに取り付けられたロープ、または使用者に接触することがある仮想車両の任意の他の部分などの使用者が事実上相互作用するようになっている仮想車両の一部として形成される。以降の説明において、物理的な接点は、使用者との実際の接触に使用される触覚インターフェースの一部として形成される。
【0034】
第1のメインステップ101において、物理的なエンジンが最先端の技術における既存の方法を使用して三次元空間における模擬車両の仮想の動きを分析し、かつ車両の動きによって触覚インターフェースと接触する体の一部に生じる直線加速度ベクトルおよび角加速度ベクトルを決定し、前記ベクトルは、三次元空間で表される。物理的なエンジンは、また車両の速度を推定することができる。この推定は、車両の残りの部分との仮想接点の強固な、または強固でない連結の態様を考慮することができ、仮想接点における直線加速度および角加速度が決定される。物理的なエンジンはまた車両の角速度<vlin>および<vang>を推定することができる。
【0035】
第2のメインステップ102において、触覚インターフェースを制御するように刺激コマンドが計算される103,104。実際、仮想接点における直線および角加速度ベクトルは、実質的に物理的な接点に対して加えられる力およびトルクに変換され、それに従い触覚インターフェースに接触する体の一部は刺激され、前記ベクトルは三次元で表される。他のコマンド105はまた、例えばマルチメディアタイプの他の機器を制御するようにエンジンによって決定されることができる。前記マルチディア機器は、例えば使用者のために意図された車両の動きを表す音と共にスクリーン上に画像の一連のシーンを投影することができる。環境に存在する音などもまた放送することができる。
【0036】
所与の実施形態において、模擬車両をマルチメディア機器に視覚的に表すことはできないが、触覚インターフェースにおいて模擬されるその動きは表すことはでき、このモードは、好都合にナビゲーション用途において使用されることがでる。したがって使用者は、例えば動いているような錯覚を感じながら仮想都市で移動することができる。
【0037】
触覚インターフェースは、少なくとも1つの点にて使用者と接触し、かつその点は、車両に強固に連結された支持点、または強固でない接点、例えば制御ハンドル、または車のハンドルなどの前記車両の制御機器、またはロープなど車両に取り付けられた要素のいずれかに対応する。触覚インターフェースおよび使用者の間の接点は、車両内の使用者の仮想支持点に対応させることができ、車両の残りの部分と摩擦を伴う、または伴わない粘弾性の連結を有する。
【0038】
方法の第3のステップを実行する間、フィードバック力およびトルクは、例えば手などの使用者の体における触覚インターフェースとの物理的な接点に加えられるように決定される。いくつかの物理的な接点がある場合、これら各点の力およびトルクを決定することができる。この力104およびこのトルク103は、三次元であり、かつ事前ステップにおいて決定された直線加速度および角加速度ベクトルにそれぞれ比例する。
【0039】
フィードバックの力<F3D>、すなわち力フィードバック触覚インターフェースによって加えられる力は、以下の式による三次元ベクトルによって表される。
【数3】
ここで、
<alin>は、三次元で表される仮想接点における直線加速度ベクトル
αは、設定可能な実係数
mは、車両の質量
である。
【0040】
係数αは、正または負とすることができる。これは、力<F3D>は、加速度<alin>と同じ方向または反対方向とすることができることを意味する。αを広くパラメータ化し、それにしたがい力<F3D>の方向および強度を選択することにより、使用者にシミュレーションを適合させることができる。
【0041】
力フィードバックアームが触覚インターフェースとして使用される場合、力<F3D>を前記アームの剛性係数に応じて以下の式を使って表すことができる。
【数4】
ここで、
krは、アームの剛性係数
<λ>は、力フィードバックアームの動きを表す三次元ベクトル
である。
【0042】
式(1)および(2)を使い、係数αと<λ>を以下の式により関連させることができる。
【数5】
特にこの式は、係数αを使用される力フィードバックアームの特性に調整することができる。
【0043】
1つの代替の実施形態において、力は、以下の式により加速度<alin>、直線速度<vlin>および直線加速度の導関数<J>の線形結合から推定されることができる。
【数6】
ここで、
α’は、第2の設定可能な実係数
α”は、第3の設定可能な実係数
<J>は、通常アングロサクソン表現では「jerk」と称される、直線加速度ベクトルの時間微分を表すベクトル
である。
【0044】
本発明の1つの代替の実施形態において、力<F3D>を直線加速度の累乗、直線速度の累乗、および直線加速度の時間微分の累乗の線形結合で表すことができる。また力<F3D>は、例えば曲率半径または前記車両の位置などの車両の軌跡情報を使用して決定されることができる。
【0045】
前に説明したように、方法の第2のメインステップ102は、触覚インターフェースとの物理的な接点において使用者の体に適用されるフィードバックの力およびトルクを決定する。トルクは、実質的に力<F3D>の印加点に加えられ、以下の式を用いて表される。
【数7】
ここで、
<aang>は、三次元で表される仮想接点における角加速度ベクトル
βは、正または負の値を取り得る設定可能な実係数
Iは、模擬車両の慣性モーメント
<r>は、<C3D>と同じ方向の単位回転ベクトル
である。
【0046】
またトルク<C3D>は、以下の式を用いて表すこともできる。
【数8】
ここで、
τは、力フィードバックアームのねじれ定数
θは、動く角度
である。
【0047】
以下の式を用いてθを係数βと関連づけることができる。
【数9】
したがって式(7)により、係数βを使用する触覚インターフェースの特性に調整することができる。
【0048】
図2は、本発明による方法を実行するシミュレーション装置の例を提供する。この例において、使用者200は、模擬車両にあるものを表す座席201に座っている。記憶回路に関連したマイクロプロセッサーなどの計算手段を、前述した本発明による方法とは異なるステップを実行するために使用することができる。前記手段は、例えば座席201の基部204に配置されることができる。1つまたは複数のマルチメディア機器を使用することができる。例えば、座席201の前にスクリーンを配置することができ、前記座席の周囲に配置された複数の音響の囲いを配置することができ、これらのマルチメディア機器は、図に示されていない。マルチメディア情報は、また例えば可搬型のマルチメディア機器であるhmdタイプの頭部装着型ディスプレイに送信されることができる。この例において使用される触覚インターフェースは、力フィードバックアームである。それは、基軸と呼ばれる2つの平行な機械軸208,209に接続された基部で構成され、前記軸は、2つの軸が枢動移動の間平行を保ったまま、基部に位置する回転軸の周りに同じ平面内で枢動することができる。基軸の第1端部は、基部に接続され、かつ第2端部は、主軸205と呼ばれる機械軸に接続される。基軸の移動により、主軸の2次元の回転運動を引き起こすことができる。主軸は、3つの副軸205,206,207およびエンジンブロック210を備える。第1の副軸205は、基軸208,209に接続され、かつその端部の1つは、エンジンブロック210に接続され、前記ブロックは、第1の副軸205に対して固定される。エンジンブロックはまた、柄の副軸と呼ばれる、主軸の他の2つの副軸206,207に接続される。エンジンブロックにより、3つの副軸206,207,205が同じ方向を保ちながら、前記2つの副軸に対して回転および並進移動を生じさせることができる。柄は、2つの柄の副軸203に接続される。柄は、例えば前記副軸および接触部分203に接続されたアーム211で構成され、操作員は、例えば両手で握ることによって前記部分に接触する。したがって異なる軸の制御された動きにより、力およびトルクを柄に伝動させることができる。
【0049】
前述の刺激コマンドを用いて制御された力フィードバックアームにより、動いている印象を使用者に伝えることができる。触覚刺激を与えている間、使用者は、使用者が受ける力およびトルクに抵抗するよう意図されている。したがって、使用者が感じる、動いている印象の時間に理論上の制限はない。
【0050】
図3は、力フィードバックハンドルに関連した力フィードバックアームの例を提供する。力フィードバックアーム300は、柄に対応する部分以外は図2を用いて説明されたものと類似している。実際、力フィードバックハンドル301を使用することは可能である。アームの他の要素と組み合わせて、3次元に移動可能なハンドルが可能となり、その軸は、ハンドルに固定された軸のみではなく、三次元の回転軸である。実際、自動車の場合は、例えば傾斜した道を曲がる際にドライバーの手が受けるトルクは、ハンドルの軸上にある必要はない。
【符号の説明】
【0051】
100 構成ステップ
101 第1のメインステップ
102 第2のメインステップ
103 トルク
104 力
200 使用者
201 座席
204 基部
205,206,207 副軸
208,209 機械軸
211 アーム
300 力フィードバックアーム
301 ハンドル
【特許請求の範囲】
【請求項1】
仮想車両の動きを模擬する方法であって、使用者は、力フィードバック触覚インターフェースを含むシミュレータに物理的に接触し、
前記物理的な接点は、前記触覚インターフェースおよび前記使用者の体の間の少なくとも1つの物理的な接点に対応し、それは前記使用者および前記仮想車両の間の仮想接点を表し、
− 前記使用者および前記仮想車両の間の前記仮想接点における直線加速度ベクトル<alin>(ベクトルalinを表す。以下同様。)および直線速度ベクトル<vlin>を決定する第1のステップ(101)であって、前記ベクトルが前記仮想接点における前記車両の動きを表す、第1のステップと、
− 前記直線加速度ベクトル<alin>および直線速度ベクトル<vlin>から三次元力ベクトル<F3D>を推定する第2のステップ(102)であって、前記力ベクトルは、前記直線加速および速度ベクトルの線形結合によって決定され、対応する力が前記触覚インターフェースを介して実質的に前記物理的な接点に加えられる、第2のステップと、
の少なくとも2つのステップを備えることを特徴とする方法。
【請求項2】
前記力<F3D>が、前記直線加速度の累乗、直線速度の累乗、および直線加速度の時間微分の累乗の線形結合から推定されることを特徴とする、請求項1に記載の方法。
【請求項3】
前記使用者および前記触覚インターフェースの間の前記仮想接点における角加速度ベクトル<aang>を決定するステップであって、前記ベクトルが前記仮想接点における前記車両の動きを表す、ステップを備えることを特徴とする請求項1に記載の方法。
【請求項4】
前記角加速度ベクトル<aang>から三次元トルクベクトル<C3D>を推定するステップであって、前記トルクベクトルは、前記加速度ベクトルに比例し、かつ対応するトルクが前記触覚インターフェースによって実質的に前記物理的な接点に加えられる、ステップを備えることを特徴とする、請求項3に記載の方法。
【請求項5】
前記力<F3D>が、以下の式
【数10】
を満たすことを特徴とし、
<alin>は、三次元の前記直線加速度ベクトル
αは、設定可能な実係数
mは、前記模擬車両の質量
である、請求項1〜4のいずれか一項に記載の方法。
【請求項6】
前記トルク<C3D>が、以下の式
【数11】
を満たすことを特徴とし、
<aang>は、三次元の前記角加速度ベクトル
βは、正または負の値を取り得る設定可能な実係数
Iは、前記模擬車両の慣性モーメント
である、請求項4または5に記載の方法。
【請求項7】
前記触覚インターフェースおよび前記使用者の間の前記物理的な接点が、前記仮想車両との固定支持点に対応することを特徴とする、請求項1〜6のいずれか一項に記載の方法。
【請求項8】
前記触覚インターフェースおよび前記使用者の間の前記物理的な接点が、前記仮想車両の制御機器との仮想接点に対応することを特徴とする、請求項1〜7のいずれか一項に記載の方法。
【請求項9】
仮想車両の動きを模擬する装置であって、使用者は、力フィードバック触覚インターフェースを備える前記装置に物理的に接触し、前記物理的な接点は、前記触覚インターフェースおよび前記使用者の体の間の少なくとも1つの物理的な接点に対応し、それは、前記使用者および前記仮想車両の間の仮想接点を表し、
前記使用者および前記仮想車両の間の前記仮想接点における直線加速度ベクトル<alin>および直線速度ベクトル<vlin>を決定する(101)手段であって、前記ベクトルが前記仮想接点における前記仮想車両の動きを表す、手段と、
前記直線加速度ベクトル<alin>および前記速度ベクトル<vlin>から三次元力ベクトル<F3D>を推定する(102)手段であって、前記力ベクトルが前記直線加速度および速度ベクトルの線形結合によって決定され、対応する力が前記触覚インターフェースによって実質的に前記接点に加えられる、手段と、
を備えることを特徴とする装置。
【請求項10】
前記力<F3D>が、前記直線加速度の累乗、直線速度の累乗、および直線加速度の時間微分の累乗の線形結合から推定されることを特徴とする、請求項9に記載の装置。
【請求項11】
前記装置が、前記使用者および前記触覚インターフェースの間の前記接点における角加速度ベクトル<aang>を決定する手段であって、前記ベクトルが、前記接点における前記車両の動きを表す、手段を備えることを特徴とする、請求項9または10に記載の装置。
【請求項12】
前記角加速度ベクトル<aang>から三次元トルクベクトル<C3D>を推定する手段であって、前記トルクベクトルが、前記加速度ベクトルに比例し、かつ対応するトルクが前記触覚インターフェースによって実質的に前記接点に加えられる、手段を備えることを特徴とする、請求項11に記載の装置。
【請求項13】
前記触覚インターフェースが前記使用者の体との接点として使用される柄(203)を備える力フィードバックアームであることを特徴とする、請求項10〜12のいずれか一項に記載の装置。
【請求項14】
前記触覚インターフェースが前記使用者の体との接点として使用される力フィードバックハンドル(301)を備える力フィードバックアーム(300)であることを特徴とする、請求項10〜12のいずれか一項に記載の装置。
【請求項15】
前記使用者に対してビデオ画像の一連のシーンを投影する手段であって、前記一連のシーンが前記車両の模擬された動きを表す、手段を備えることを特徴とする、請求項10〜14のいずれか一項に記載の装置。
【請求項1】
仮想車両の動きを模擬する方法であって、使用者は、力フィードバック触覚インターフェースを含むシミュレータに物理的に接触し、
前記物理的な接点は、前記触覚インターフェースおよび前記使用者の体の間の少なくとも1つの物理的な接点に対応し、それは前記使用者および前記仮想車両の間の仮想接点を表し、
− 前記使用者および前記仮想車両の間の前記仮想接点における直線加速度ベクトル<alin>(ベクトルalinを表す。以下同様。)および直線速度ベクトル<vlin>を決定する第1のステップ(101)であって、前記ベクトルが前記仮想接点における前記車両の動きを表す、第1のステップと、
− 前記直線加速度ベクトル<alin>および直線速度ベクトル<vlin>から三次元力ベクトル<F3D>を推定する第2のステップ(102)であって、前記力ベクトルは、前記直線加速および速度ベクトルの線形結合によって決定され、対応する力が前記触覚インターフェースを介して実質的に前記物理的な接点に加えられる、第2のステップと、
の少なくとも2つのステップを備えることを特徴とする方法。
【請求項2】
前記力<F3D>が、前記直線加速度の累乗、直線速度の累乗、および直線加速度の時間微分の累乗の線形結合から推定されることを特徴とする、請求項1に記載の方法。
【請求項3】
前記使用者および前記触覚インターフェースの間の前記仮想接点における角加速度ベクトル<aang>を決定するステップであって、前記ベクトルが前記仮想接点における前記車両の動きを表す、ステップを備えることを特徴とする請求項1に記載の方法。
【請求項4】
前記角加速度ベクトル<aang>から三次元トルクベクトル<C3D>を推定するステップであって、前記トルクベクトルは、前記加速度ベクトルに比例し、かつ対応するトルクが前記触覚インターフェースによって実質的に前記物理的な接点に加えられる、ステップを備えることを特徴とする、請求項3に記載の方法。
【請求項5】
前記力<F3D>が、以下の式
【数10】
を満たすことを特徴とし、
<alin>は、三次元の前記直線加速度ベクトル
αは、設定可能な実係数
mは、前記模擬車両の質量
である、請求項1〜4のいずれか一項に記載の方法。
【請求項6】
前記トルク<C3D>が、以下の式
【数11】
を満たすことを特徴とし、
<aang>は、三次元の前記角加速度ベクトル
βは、正または負の値を取り得る設定可能な実係数
Iは、前記模擬車両の慣性モーメント
である、請求項4または5に記載の方法。
【請求項7】
前記触覚インターフェースおよび前記使用者の間の前記物理的な接点が、前記仮想車両との固定支持点に対応することを特徴とする、請求項1〜6のいずれか一項に記載の方法。
【請求項8】
前記触覚インターフェースおよび前記使用者の間の前記物理的な接点が、前記仮想車両の制御機器との仮想接点に対応することを特徴とする、請求項1〜7のいずれか一項に記載の方法。
【請求項9】
仮想車両の動きを模擬する装置であって、使用者は、力フィードバック触覚インターフェースを備える前記装置に物理的に接触し、前記物理的な接点は、前記触覚インターフェースおよび前記使用者の体の間の少なくとも1つの物理的な接点に対応し、それは、前記使用者および前記仮想車両の間の仮想接点を表し、
前記使用者および前記仮想車両の間の前記仮想接点における直線加速度ベクトル<alin>および直線速度ベクトル<vlin>を決定する(101)手段であって、前記ベクトルが前記仮想接点における前記仮想車両の動きを表す、手段と、
前記直線加速度ベクトル<alin>および前記速度ベクトル<vlin>から三次元力ベクトル<F3D>を推定する(102)手段であって、前記力ベクトルが前記直線加速度および速度ベクトルの線形結合によって決定され、対応する力が前記触覚インターフェースによって実質的に前記接点に加えられる、手段と、
を備えることを特徴とする装置。
【請求項10】
前記力<F3D>が、前記直線加速度の累乗、直線速度の累乗、および直線加速度の時間微分の累乗の線形結合から推定されることを特徴とする、請求項9に記載の装置。
【請求項11】
前記装置が、前記使用者および前記触覚インターフェースの間の前記接点における角加速度ベクトル<aang>を決定する手段であって、前記ベクトルが、前記接点における前記車両の動きを表す、手段を備えることを特徴とする、請求項9または10に記載の装置。
【請求項12】
前記角加速度ベクトル<aang>から三次元トルクベクトル<C3D>を推定する手段であって、前記トルクベクトルが、前記加速度ベクトルに比例し、かつ対応するトルクが前記触覚インターフェースによって実質的に前記接点に加えられる、手段を備えることを特徴とする、請求項11に記載の装置。
【請求項13】
前記触覚インターフェースが前記使用者の体との接点として使用される柄(203)を備える力フィードバックアームであることを特徴とする、請求項10〜12のいずれか一項に記載の装置。
【請求項14】
前記触覚インターフェースが前記使用者の体との接点として使用される力フィードバックハンドル(301)を備える力フィードバックアーム(300)であることを特徴とする、請求項10〜12のいずれか一項に記載の装置。
【請求項15】
前記使用者に対してビデオ画像の一連のシーンを投影する手段であって、前記一連のシーンが前記車両の模擬された動きを表す、手段を備えることを特徴とする、請求項10〜14のいずれか一項に記載の装置。
【図1】

【図2】
【図3】
【図2】
【図3】
【公表番号】特表2013−505470(P2013−505470A)
【公表日】平成25年2月14日(2013.2.14)
【国際特許分類】
【出願番号】特願2012−529236(P2012−529236)
【出願日】平成22年9月14日(2010.9.14)
【国際出願番号】PCT/EP2010/063463
【国際公開番号】WO2011/032937
【国際公開日】平成23年3月24日(2011.3.24)
【出願人】(500531141)セントレ・ナショナル・デ・ラ・レシェルシェ・サイエンティフィーク (84)
【出願人】(512069289)インスティテュート・ナショナル・デ・レシェルシェ・エン・インフォルマティーク・エ・エン・オートマティーク (1)
【Fターム(参考)】
【公表日】平成25年2月14日(2013.2.14)
【国際特許分類】
【出願日】平成22年9月14日(2010.9.14)
【国際出願番号】PCT/EP2010/063463
【国際公開番号】WO2011/032937
【国際公開日】平成23年3月24日(2011.3.24)
【出願人】(500531141)セントレ・ナショナル・デ・ラ・レシェルシェ・サイエンティフィーク (84)
【出願人】(512069289)インスティテュート・ナショナル・デ・レシェルシェ・エン・インフォルマティーク・エ・エン・オートマティーク (1)
【Fターム(参考)】
[ Back to top ]